Embed Size (px)
Citation preview

MOTORISATION D’UNE MONTURE EQ3
Manuel technique et guide d’assemblage
Partie mécanique et partie électronique Révision 17.12.27
Motorisation d’une monture EQ3
Contenu du document 2
CONCEPTION Jean Vallières
CONTENU DU DOCUMENT Cliquez sur les liens pour accéder directement au contenu La monture originale Calculs pour les modifications Liste des pièces mécaniques Le montage des pièces en déclinaison La boîte de contrôle et ses fonctions Vue intérieure de la boîte de contrôle Schémas des circuits électroniques du EQ3 La manette simple du EQ3 Prises, connecteurs et câbles DIN des moteurs du EQ3 Liste des pièces électroniques Le montage et les tests Programmation du Arduino du EQ3
Ajustements des paramètres de contrôle dans le « Setup Dialog » du pilote ASCOM ou du programme SKYPIKIT FEX. Monture complétée et tests d’autoguidage Tests d’autoguidage avec PHD2 Guiding Une image test : l’amas double de Persée
Motorisation d’une monture EQ3
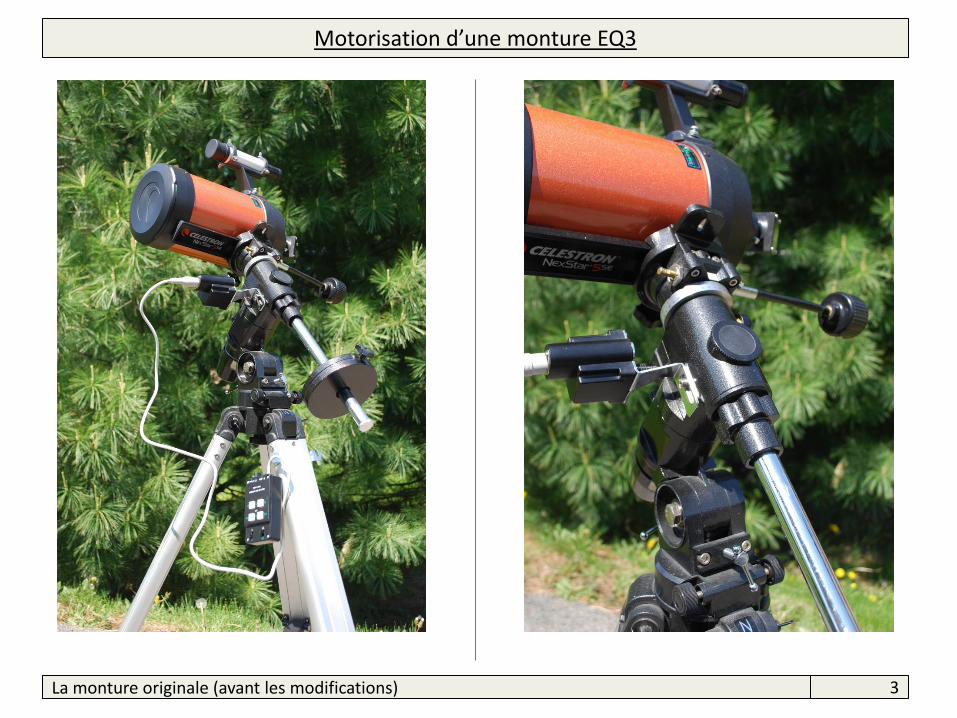
La monture originale (avant les modifications) 3
Motorisation d’une monture EQ3
Calculs pour les modifications 4
LA MONTURE ORIGINALE Les photos de la page précédente montrent la monture EQ3 telle qu’elle était avant les modifications. Cette monture équatoriale allemande était munie d’un seul moteur pas-à-pas en ascension droite qui pouvait faire le suivi (tracking) à la vitesse sidérale pour conserver l’objet visé immobile dans le champ de vision. La boîte de contrôle originale permettait aussi de faire des déplacements mineurs jusqu’à la vitesse 8X sidérale à l’aide de boutons. Comme il n’y avait pas de moteur en déclinaison, les mouvements de cet axe se faisaient manuellement à l’aide d’une roulette au bout d’une tige flexible. Avec cette monture, le suivi permettait de faire des observations visuelles avec un petit télescope et de prendre des photos du ciel avec des expositions jusqu’à 60 secondes si la monture était parfaitement alignée et si la focale était courte : appareil photo muni d’une lentille télé-photo par exemple. Il n’était pas possible de faire du guidage automatique avec une caméra d’autoguidage pour pouvoir utiliser des poses plus longues et des focales plus grandes.
LES MODIFICATIONS
Le but du projet est justement de corriger ce problème en ajoutant un moteur en déclinaison et une boîte de contrôle qui permet de faire de l’autoguidage et plusieurs autres fonctions.
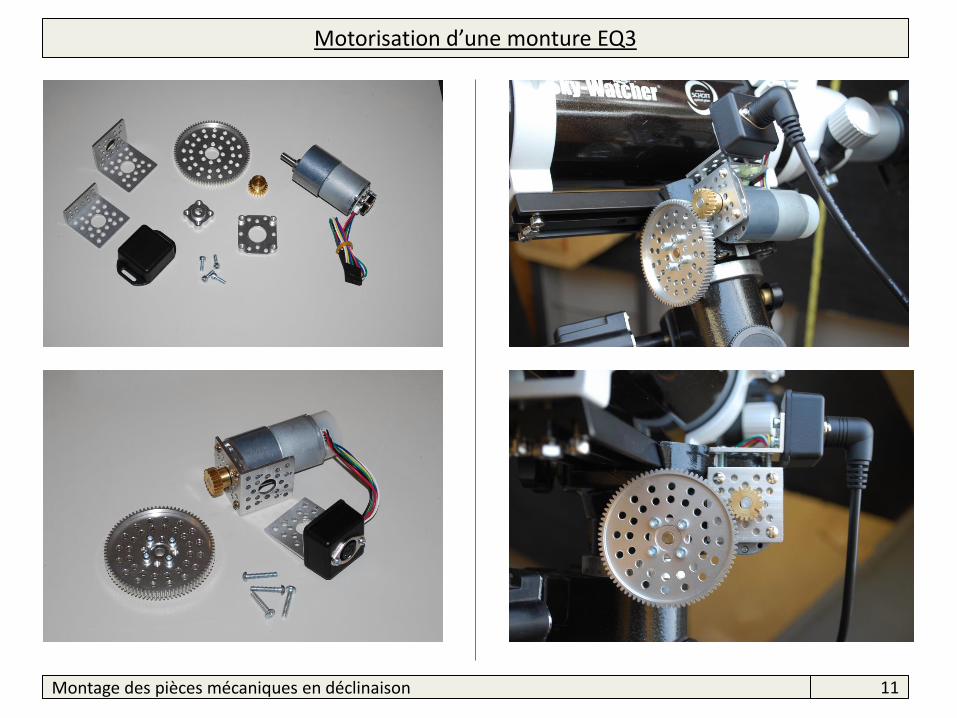
CALCULS POUR LES MODIFICATIONS Chaque axe de cette monture est entraîné par un engrenage avec vis sans fin (worm gear). L’engrenage d’ascension droite a 120 dents et il faut donc 120 tours de la vis sans fin pour faire 360°. L’engrenage de déclinaison a seulement 66 dents. Avec un pas (pitch) de 48 dents par pouce de diamètre, l’engrenage d’ascension droite a un diamètre de 2,5 pouces et l’engrenage de déclinaison a un diamètre de seulement 1,375 pouce de diamètre. Malgré les petites dimensions des engrenages, on souhaite obtenir des photos du ciel profond sans traînées d’étoiles jusqu’à une focale d’au moins 600mm, avec par exemple une lunette 80ED à F/7,5. Ce sera un défi. Cela permettra d’avoir une petite monture très portative pour apporter dans des sites où il n’y a pas de pollution lumineuse. Les pages suivantes montrent les calculs faits avec l’application SKYPIKIT MOTOR TESTER TUNER pour connaître les caractéristiques de l’entraînement et pour choisir le bon moteur et les bons engrenages à ajouter à l’axe de déclinaison. Le moteur pas-à-pas original d’ascension droite est conservé. Le moteur ajouté en déclinaison est un moteur CC servo de Polulu (voir la liste des pièces mécaniques).
Motorisation d’une monture EQ3
Calculs pour les modifications en ascension droite 5
CALCULS POUR LES MODIFICATIONS EN ASCENSION DROITE
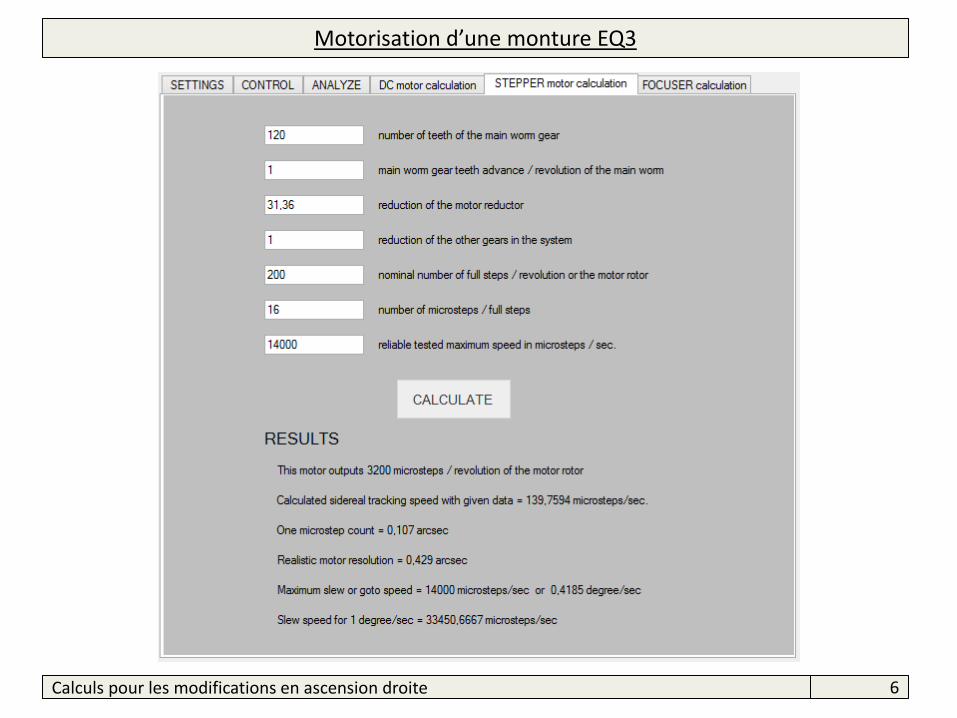
Les données sont les suivantes : L’engrenage principal sur l’axe d’ascension droite a 120 dents. Chaque tour de la vis-sans-fin fait avancer d’une dent. La boîte de réduction du moteur réduit la vitesse de 31,36 X (calculé par essais et erreurs en faisant des tests). La réduction des autres engrenages du système est de 1 X puisque la sortie de la boîte de réduction du moteur est couplé directement à l’axe de la vis-sans-fin. Le nombre de pas par tour du rotor du moteur est de 200 (calculé par essais et erreurs en faisant des tests). On choisit 16 micro-pas par pas pour contrôler ce moteur pas-à-pas, ce qui va donner 16 X 200 = 3200 micro-pas par tour du rotor du moteur. Par des tests, on trouve que ce moteur pas-à-pas peut tourner de façon fiable jusqu’à la vitesse de 14000 micro-pas par seconde avant de décrocher (avec les circuits utilisés).
Les résultats obtenus sont les suivants : Voir la page suivante. Il faut 3200 micro-pas pour un tour du rotor du moteur. La vitesse de suivi (tracking) sidérale correspond à 139,7594 micro-pas par seconde. Un micro-pas correspond à 0,107 arcsec, mais la résolution réaliste est plutôt de 0,429 arcsec. La vitesse maximum fiable de déplacement (SLEW ou GOTO) de 14000 micro-pas par seconde correspond à une vitesse de 0,4185 degré par seconde pour le télescope. Pour une vitesse de déplacement de 1 degré par seconde, il faudrait que le moteur accepte 33450,6667 micro-pas par seconde, ce qui est bien au-dessus de ses capacités. On fait finalement le choix d’une vitesse maximum de déplacement (SLEW ou GOTO) de 0,400 degré par seconde, juste un peu sous le maximum fiable (de 0,4185).
Motorisation d’une monture EQ3
Calculs pour les modifications en ascension droite 6
Motorisation d’une monture EQ3
Calculs pour les modifications en déclinaison 7
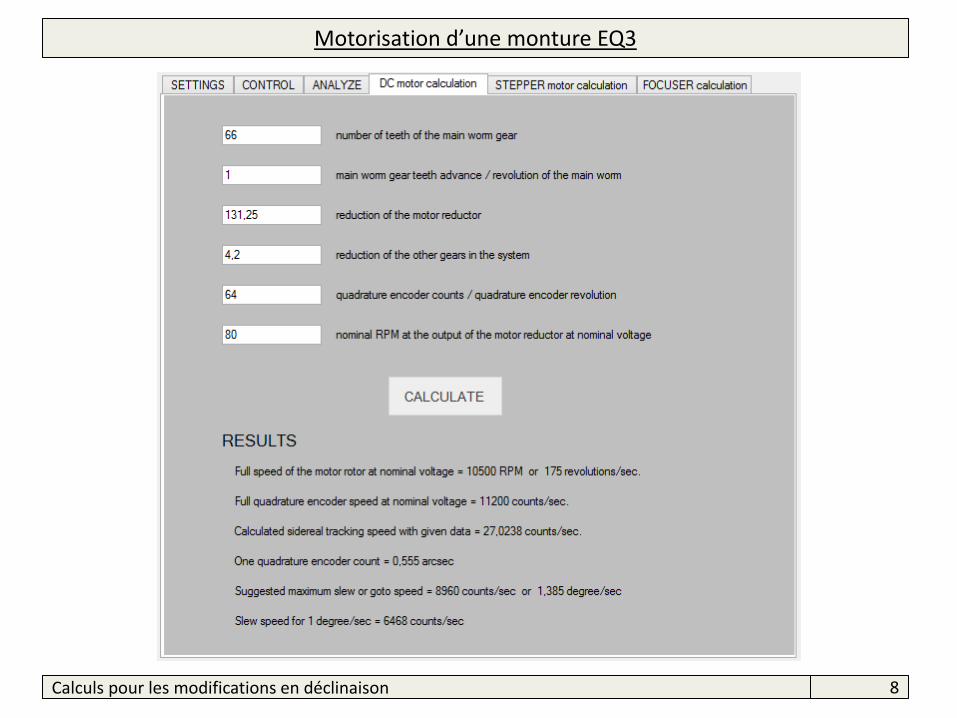
CALCULS POUR LES MODIFICATIONS EN DÉCLINAISON
Les données sont les suivantes : L’engrenage principal sur l’axe de déclinaison a 66 dents. Chaque tour de la vis-sans-fin fait avancer d’une dent. La boîte de réduction du moteur Polulu réduit la vitesse de 131,25 X (valeur précise fournie par le fabriquant du moteur). La réduction des autres engrenages du système est de 4,2 X puisqu’on a choisi un pignon de 20 dents sur l’axe de la boîte de réduction du moteur un engrenage de 84 dents sur l’axe de la vis-sans-fin (84/20 = 4,2). Le nombre de pas par tour du rotor du moteur est de 64 (encodeur de quadrature à 64 pas/tour). À 12 volts, la vitesse nominale du moteur CC choisi à la sortie de sa boîte de réduction est de 80 RPM (80 tours par minute).
Les résultats obtenus sont les suivants : Voir la page suivante. Avec une tension nominale de 12 volts, le rotor du moteur CC choisi tourne à une vitesse de 10500 RPM, soit 175 tours par seconde. Avec cette tension de 12 volts et cette vitesse de 175 tours par seconde, l’encodeur de quadrature émet un signal à une vitesse de 11200 pas par seconde. La vitesse de suivi (tracking) sidérale correspond à 27,0238 pas d’encodeur par seconde. Un pas d’encodeur correspond à une résolution de 0,555 arcsec. La vitesse maximum suggérée de déplacement (SLEW ou GOTO) de 8960 pas d’encodeur par seconde correspond à une vitesse de 1,385 degré par seconde pour le télescope. Pour une vitesse de déplacement de 1 degré par seconde, il faudrait que le moteur tourne à 6468 pas d’encodeur par seconde, ce qu’il est facilement capable de faire. On fait finalement le choix d’une vitesse maximum de déplacement (SLEW ou GOTO) de 0,800 degré par seconde. On pourrait aller plus vite mais cette vitesse est déjà le double de celle d’ascension droite (0,4°/s). Ce choix réduit aussi le bruit du moteur et peut en diminuer l’usure.
Motorisation d’une monture EQ3
Calculs pour les modifications en déclinaison 8
Motorisation d’une monture EQ3
Liste des pièces mécaniques 9
Image Description Coût USD
Qté Fournisseur et Numéro de pièce
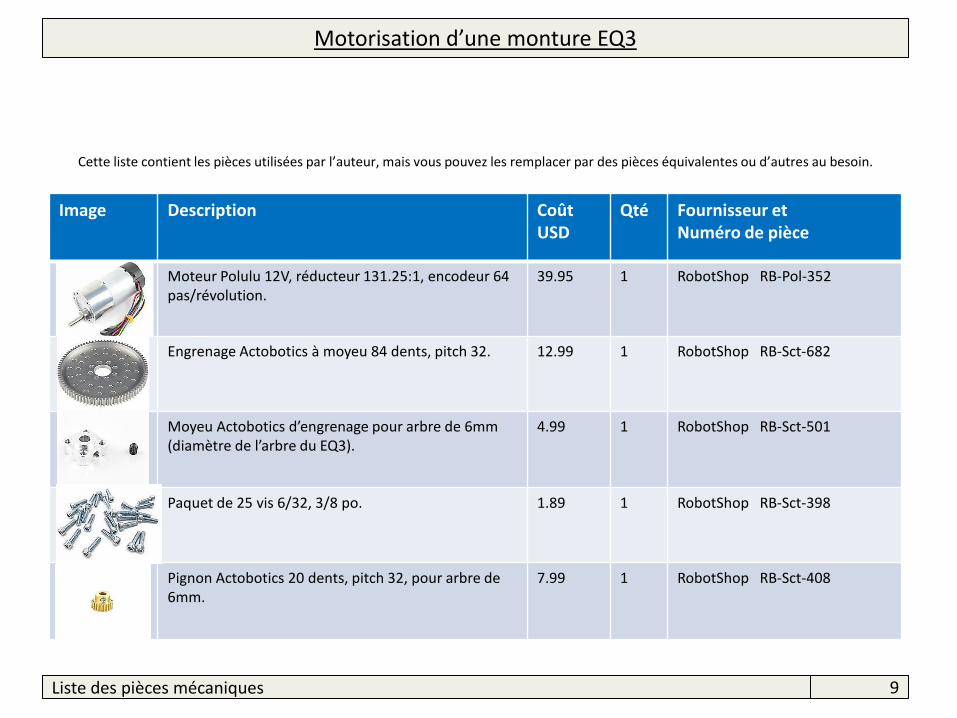
Moteur Polulu 12V, réducteur 131.25:1, encodeur 64 pas/révolution.
39.95 1 RobotShop RB-Pol-352
Engrenage Actobotics à moyeu 84 dents, pitch 32. 12.99 1 RobotShop RB-Sct-682
Moyeu Actobotics d’engrenage pour arbre de 6mm (diamètre de l’arbre du EQ3).
4.99 1 RobotShop RB-Sct-501
Paquet de 25 vis 6/32, 3/8 po. 1.89 1 RobotShop RB-Sct-398
Pignon Actobotics 20 dents, pitch 32, pour arbre de 6mm.
7.99
1 RobotShop RB-Sct-408
Cette liste contient les pièces utilisées par l’auteur, mais vous pouvez les remplacer par des pièces équivalentes ou d’autres au besoin.
Motorisation d’une monture EQ3
Liste des pièces mécaniques (suite) 10
Image Description Coût USD
Qté Fournisseur et Numéro de pièce
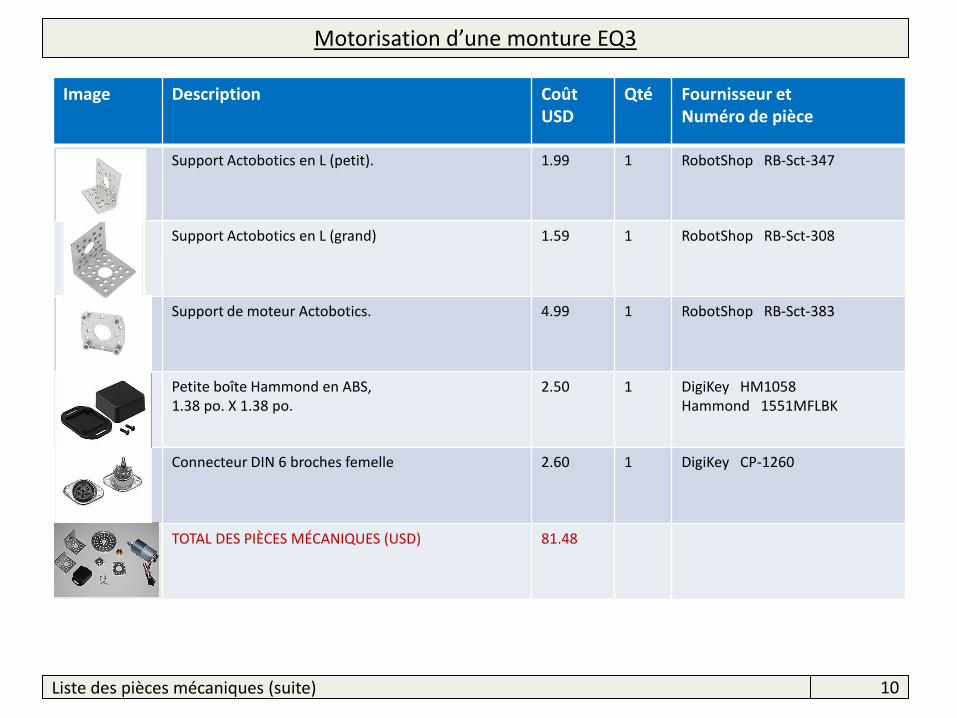
Support Actobotics en L (petit).
1.99
1 RobotShop RB-Sct-347
Support Actobotics en L (grand)
1.59
1 RobotShop RB-Sct-308
Support de moteur Actobotics. 4.99 1 RobotShop RB-Sct-383
Petite boîte Hammond en ABS, 1.38 po. X 1.38 po.
2.50 1 DigiKey HM1058 Hammond 1551MFLBK
Connecteur DIN 6 broches femelle 2.60 1 DigiKey CP-1260
TOTAL DES PIÈCES MÉCANIQUES (USD) 81.48
Motorisation d’une monture EQ3
Montage des pièces mécaniques en déclinaison 11

Motorisation d’une monture EQ3
La boîte de contrôle et ses fonctions 12
Motorisation d’une monture EQ3
La boîte de contrôle et ses fonctions (suite) 13
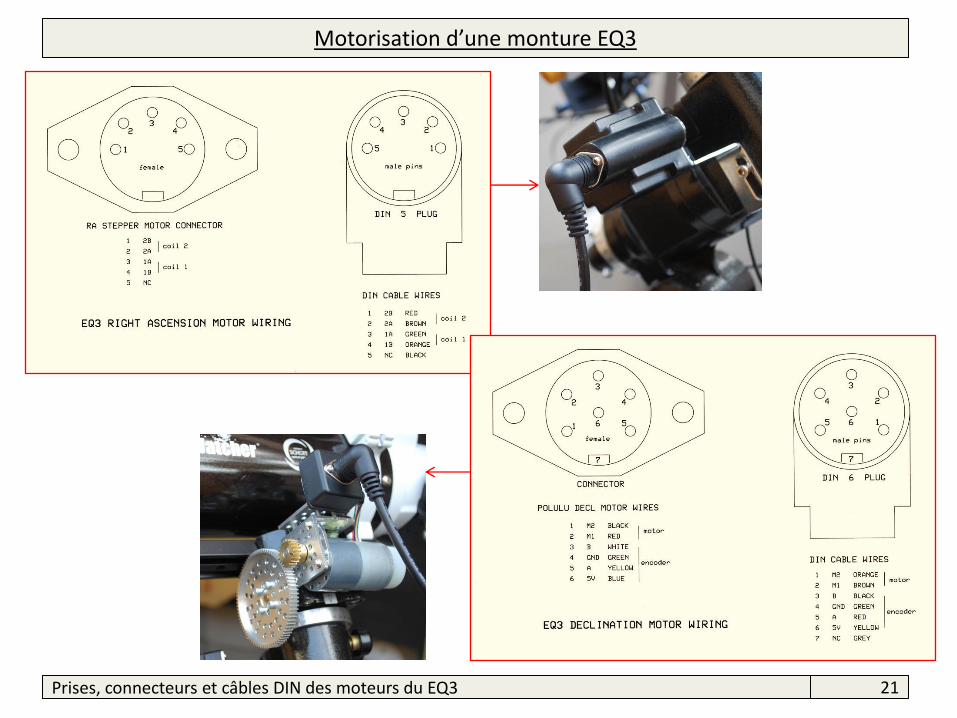
LA BOÎTE DE CONTRÔLE ET SES FONCTIONS Toute l’électronique de contrôle des moteurs de la monture est contenue à l’intérieur d’une boîte HAMMOND en ABS noire, mesurant 220mm X 110mm X 45mm (photo page suivante). On utilise les cartes de la série PLÉIADES pour monter les pièces électroniques (voir page suivante), dont la carte TAYGETA-2 pour le contrôle du moteur pas-à-pas d’ascension droite et la carte MEROPE-2 pour le contrôle du moteur CC servo de déclinaison. Le circuit de contrôle de chaque moteur est basé sur le microcontrôleur SKYPIKIT développé par l’auteur. Il y a aussi un driver de puissance adapté au type de moteur. Le circuit contient aussi un microcontrôleur ARDUINO UNO qui sert surtout à faire la communication par USB ou par Bluetooth entre les microcontrôleurs SKYPIKIT et un ordinateur ou une tablette contenant des programmes de type planétarium. Sur la boîte, un connecteur USB sert à communiquer avec un ordinateur externe (c’est en réalité le connecteur USB du circuit ARDUINO). Il y a aussi un module Bluetooth à l’intérieur pour la même fonction. Un commutateur [USB-BT] sert à choisir la source : USB ou Bluetooth. Une petite lampe DEL [BT] clignote quand il n’y a pas de signal Bluetooth apparié (paired) et reste allumée quand le signal est apparié. L’alimentation de 12 volts se raccorde à un connecteur Jack de 5,5mm-2,5mm avec le centre positif. La manette simple se raccorde à un connecteur [HANDPAD] RJ12 à 6 conducteurs.
Un autre connecteur [AUTOGUIDING] RJ12 à 6 conducteurs sert à raccorder le câble modulaire d’une caméra d’autoguidage pour faire du guidage automatique pendant la prise de photos. Ce connecteur suit la norme ST-4. Des petites lampes DEL placées en forme de croix permettent de visualiser les signaux qui proviennent de la caméra d’autoguidage. On retrouve un socle permettant d’insérer un fusible de 6 ampères. La boîte de contrôle permet au télescope de fonctionner en mode autonome (stand-alone), sans ordinateur. Pour cela, on y retrouve plusieurs commutateurs pour régler le guidage (tracking), pour indiquer de quel côté est le tube optique par rapport à la monture et pour indiquer dans quel hémisphère de la Terre on se trouve. Quand la boîte est raccordée à un ordinateur ou une tablette, les commandes provenant de l’ordinateur ou de la tablette ont priorité sur les positions des commutateurs du mode autonome. Un câble DIN à 5 conducteurs relie la boîte au moteur pas-à-pas bipolaire d’ascension droite (moteur original EQ3). Un autre câble DIN à 6 conducteurs relie la boîte au moteur CC servo de déclinaison. Le bouton OFF-ON sert à alimenter et à faire la mise à zéro (RESET) de tous les microcontrôleurs de la boîte de contrôle.
Motorisation d’une monture EQ3
Vue intérieure de la boîte de contrôle 14
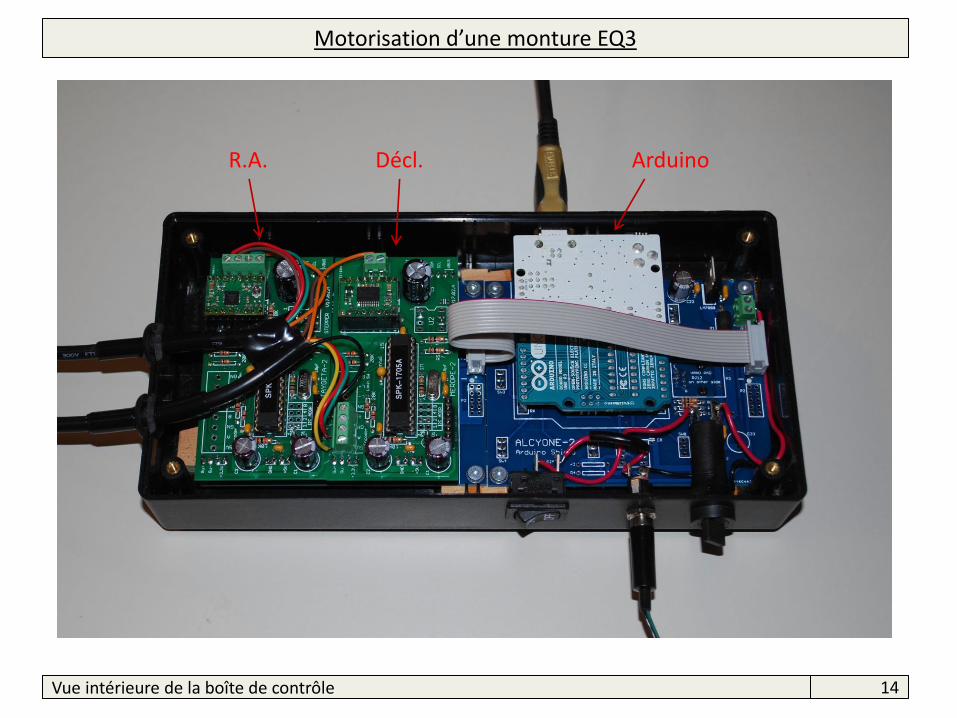
R.A. Décl. Arduino
Motorisation d’une monture EQ3
Schémas des circuits électroniques du EQ3 (vue d’ensemble) 15
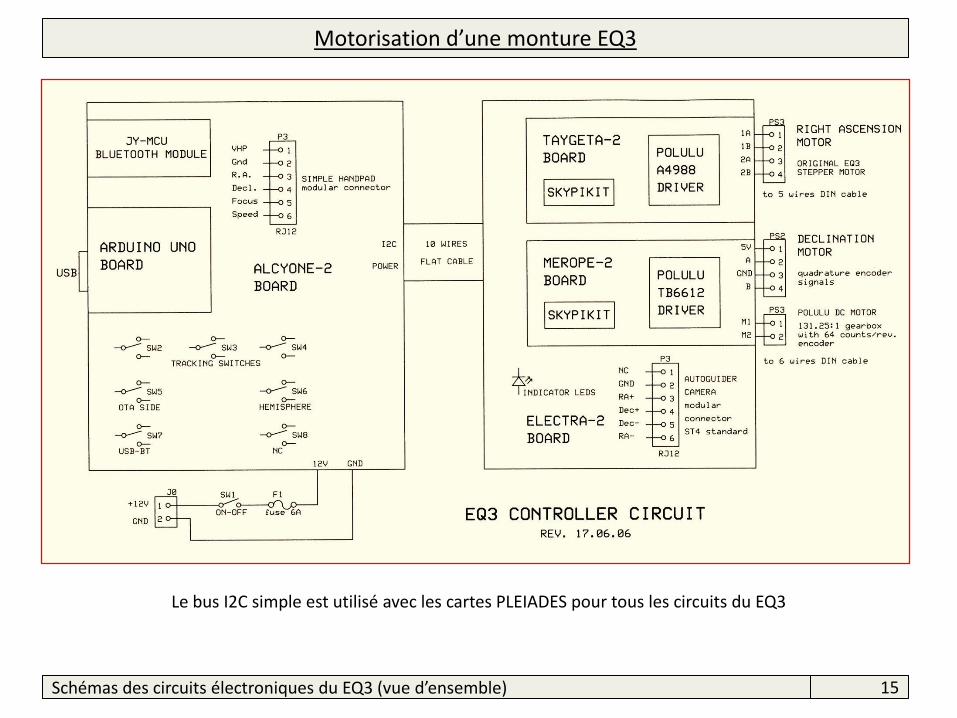
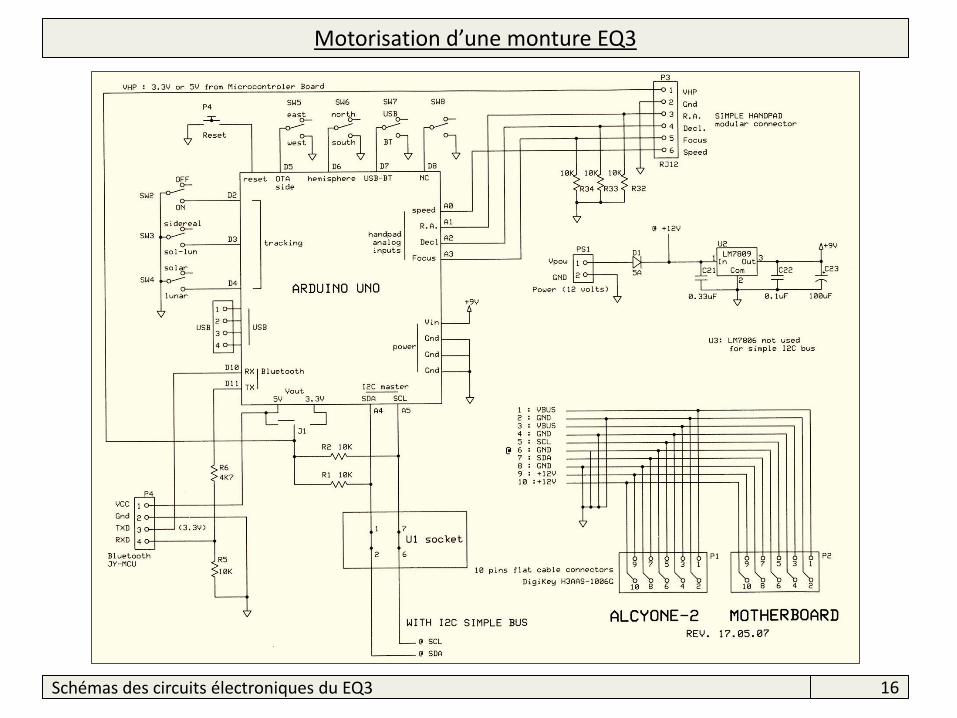
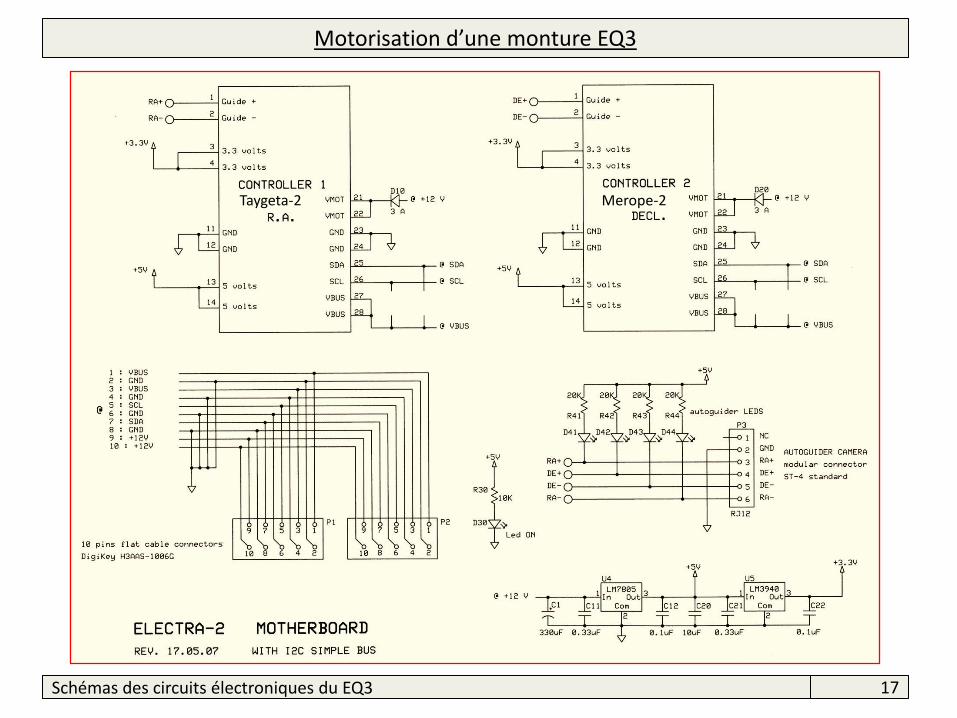
Le bus I2C simple est utilisé avec les cartes PLEIADES pour tous les circuits du EQ3
Motorisation d’une monture EQ3
Schémas des circuits électroniques du EQ3 16
Motorisation d’une monture EQ3
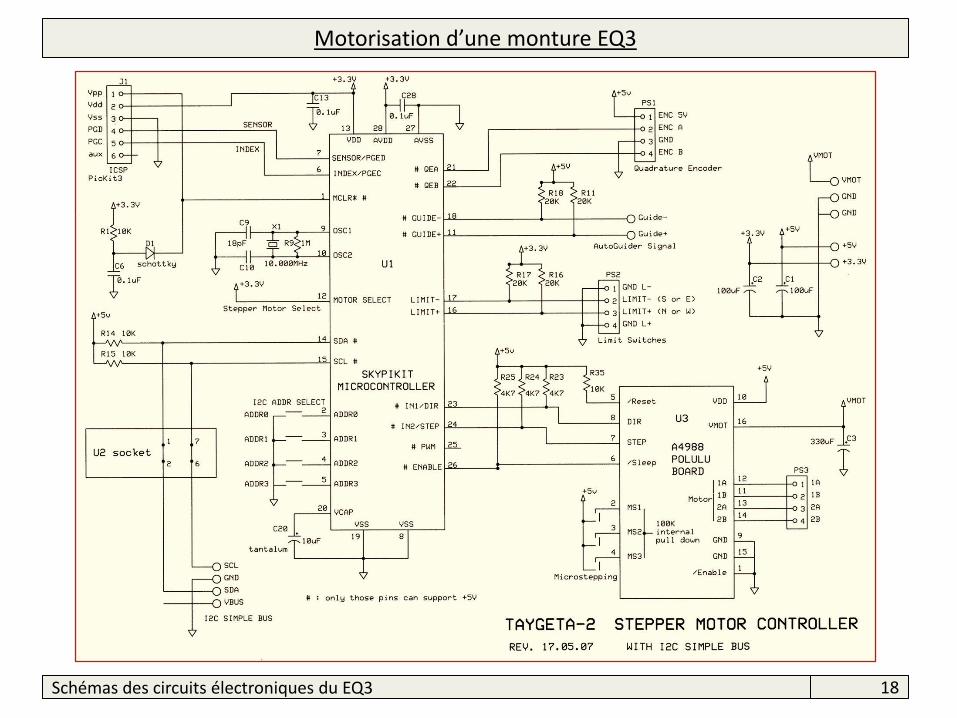
Schémas des circuits électroniques du EQ3 17
Taygeta-2 Merope-2
Motorisation d’une monture EQ3
Schémas des circuits électroniques du EQ3 18
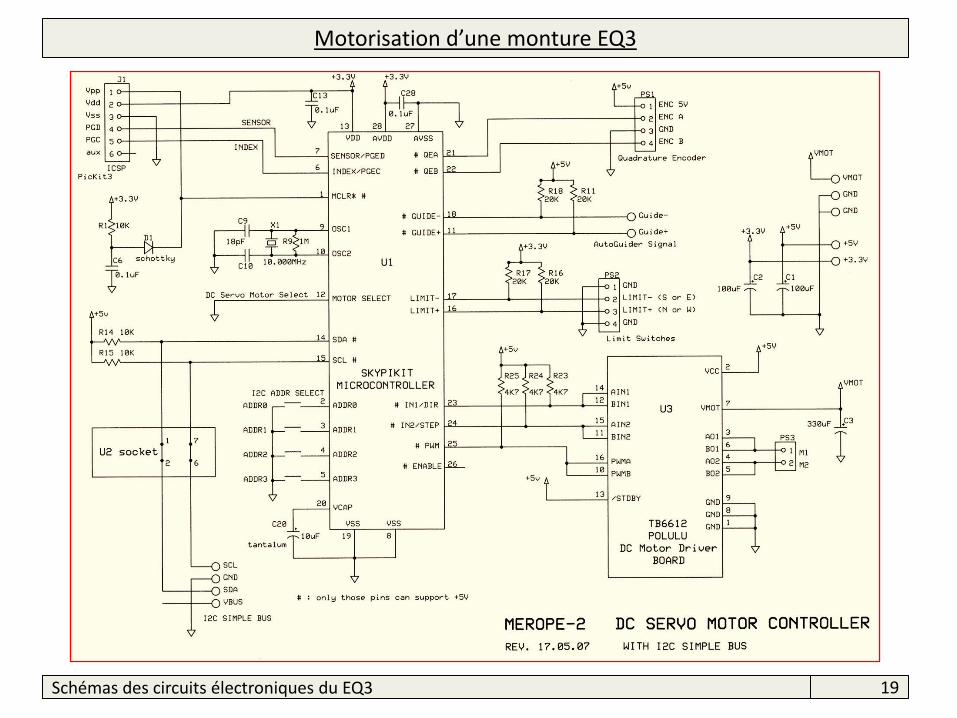
Motorisation d’une monture EQ3
Schémas des circuits électroniques du EQ3 19
Motorisation d’une monture EQ3
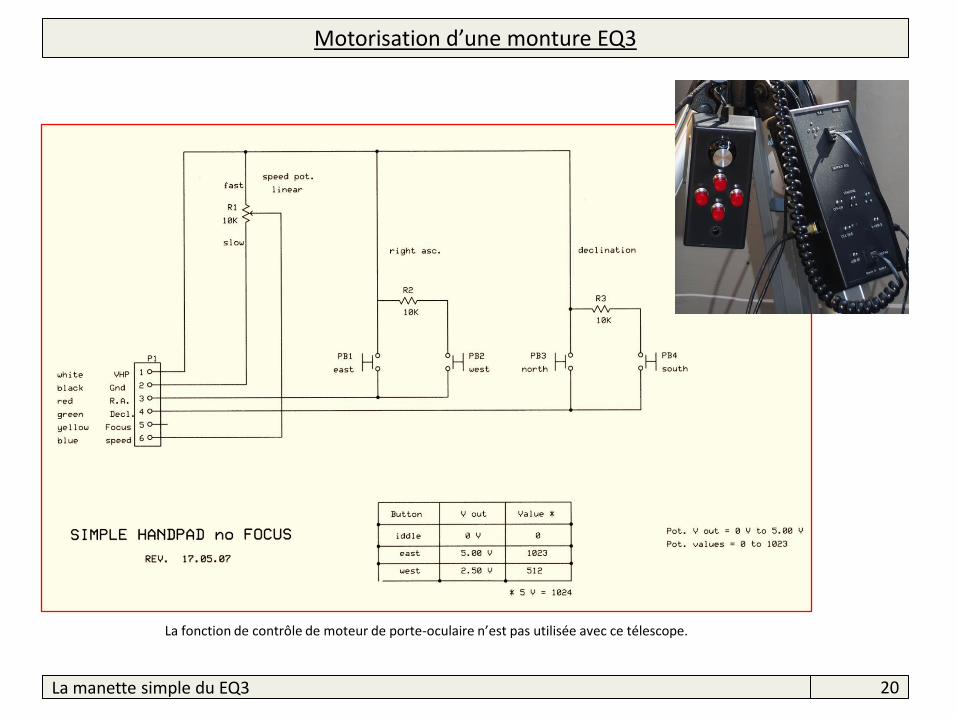
La manette simple du EQ3 20
La fonction de contrôle de moteur de porte-oculaire n’est pas utilisée avec ce télescope.
Motorisation d’une monture EQ3
Prises, connecteurs et câbles DIN des moteurs du EQ3 21
Motorisation d’une monture EQ3
Liste des pièces électroniques 22
Image Description Coût USD
Qté Fournisseur et Numéro de pièce
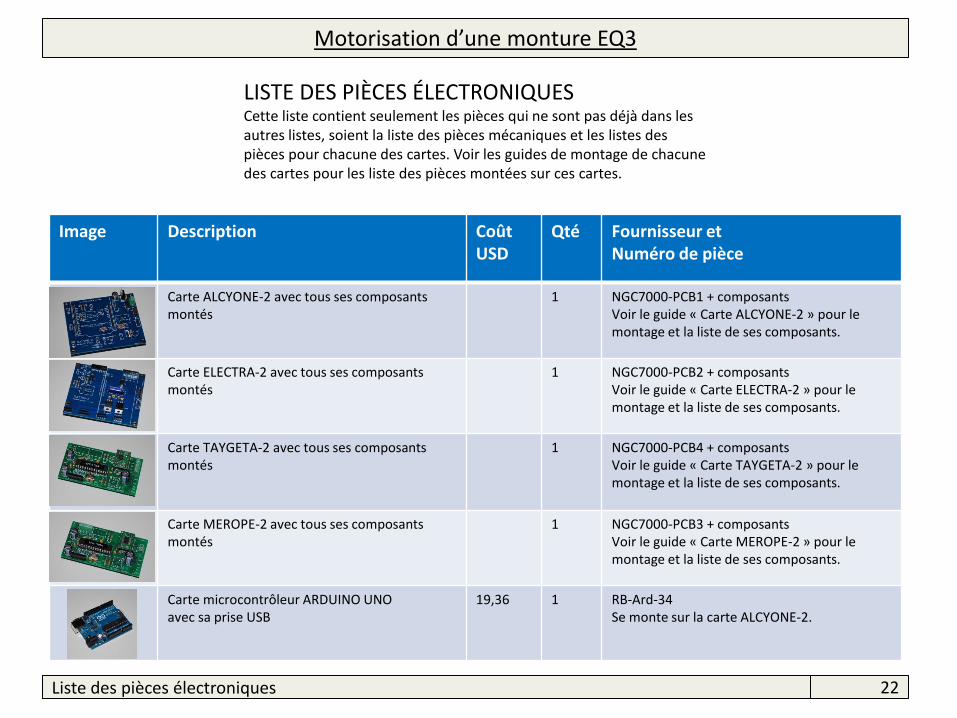
Carte ALCYONE-2 avec tous ses composants montés
1 NGC7000-PCB1 + composants Voir le guide « Carte ALCYONE-2 » pour le montage et la liste de ses composants.
Carte ELECTRA-2 avec tous ses composants montés
1 NGC7000-PCB2 + composants Voir le guide « Carte ELECTRA-2 » pour le montage et la liste de ses composants.
Carte TAYGETA-2 avec tous ses composants montés
1 NGC7000-PCB4 + composants Voir le guide « Carte TAYGETA-2 » pour le montage et la liste de ses composants.
Carte MEROPE-2 avec tous ses composants montés
1 NGC7000-PCB3 + composants Voir le guide « Carte MEROPE-2 » pour le montage et la liste de ses composants.
Carte microcontrôleur ARDUINO UNO avec sa prise USB
19,36 1 RB-Ard-34 Se monte sur la carte ALCYONE-2.
LISTE DES PIÈCES ÉLECTRONIQUES Cette liste contient seulement les pièces qui ne sont pas déjà dans les autres listes, soient la liste des pièces mécaniques et les listes des pièces pour chacune des cartes. Voir les guides de montage de chacune des cartes pour les liste des pièces montées sur ces cartes.
Motorisation d’une monture EQ3
Liste des pièces électroniques (suite) 23
Image Description Coût USD
Qté Fournisseur et Numéro de pièce
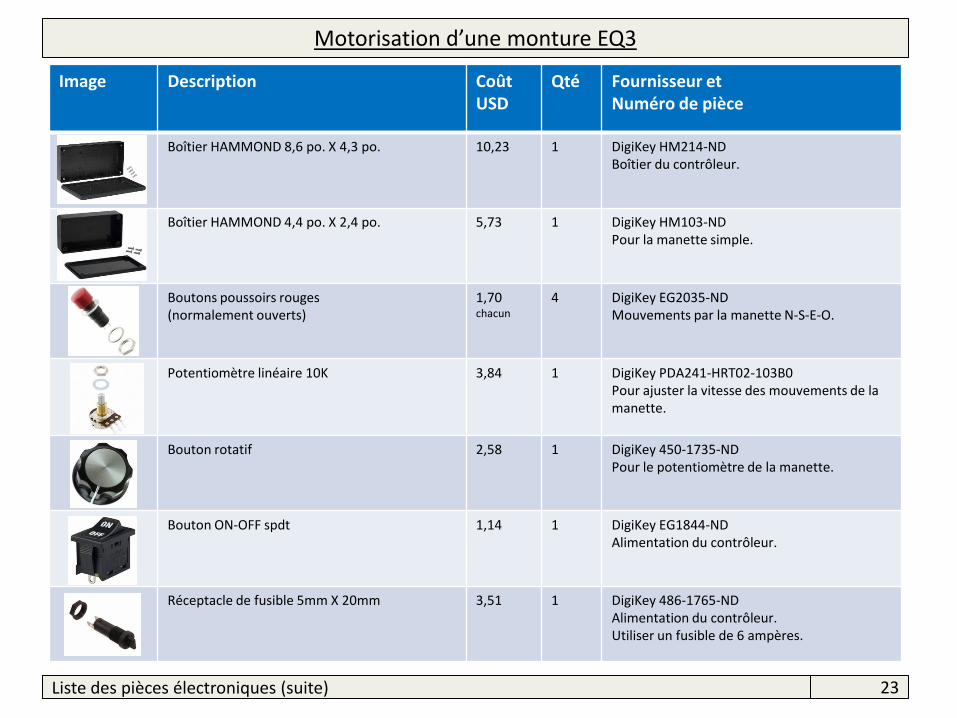
Boîtier HAMMOND 8,6 po. X 4,3 po.
10,23
1 DigiKey HM214-ND Boîtier du contrôleur.
Boîtier HAMMOND 4,4 po. X 2,4 po. 5,73 1 DigiKey HM103-ND Pour la manette simple.
Boutons poussoirs rouges (normalement ouverts)
1,70 chacun
4 DigiKey EG2035-ND Mouvements par la manette N-S-E-O.
Potentiomètre linéaire 10K 3,84 1 DigiKey PDA241-HRT02-103B0 Pour ajuster la vitesse des mouvements de la manette.
Bouton rotatif 2,58 1 DigiKey 450-1735-ND Pour le potentiomètre de la manette.
Bouton ON-OFF spdt 1,14 1 DigiKey EG1844-ND Alimentation du contrôleur.
Réceptacle de fusible 5mm X 20mm 3,51 1 DigiKey 486-1765-ND Alimentation du contrôleur. Utiliser un fusible de 6 ampères.
Motorisation d’une monture EQ3
Liste des pièces électroniques (suite) 24
Image Description Coût USD
Qté Fournisseur et Numéro de pièce
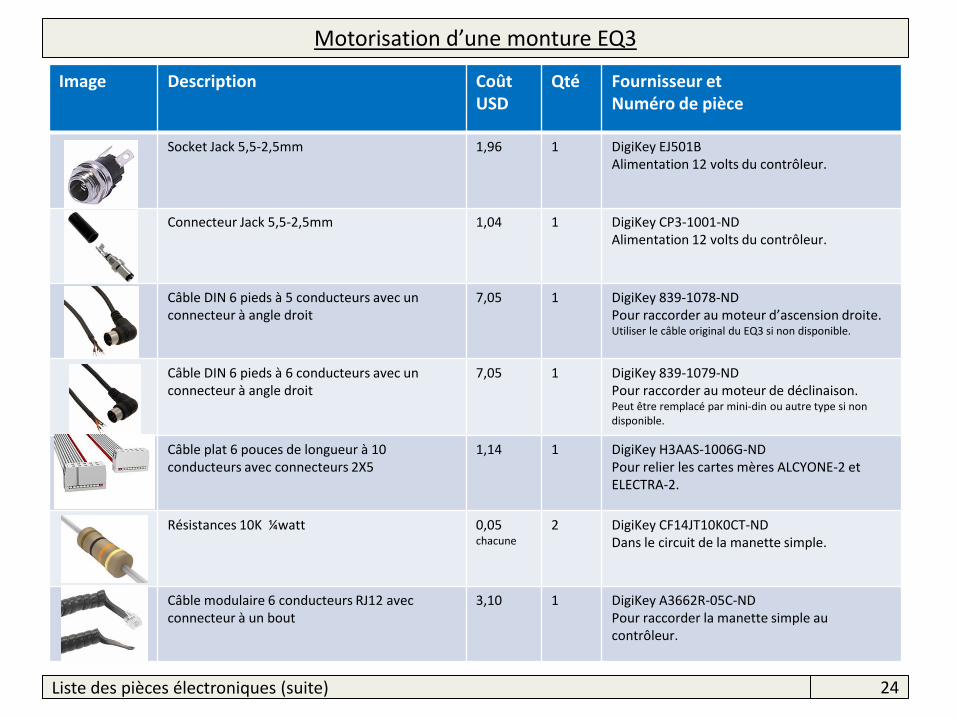
Socket Jack 5,5-2,5mm
1,96
1 DigiKey EJ501B Alimentation 12 volts du contrôleur.
Connecteur Jack 5,5-2,5mm 1,04 1 DigiKey CP3-1001-ND Alimentation 12 volts du contrôleur.
Câble DIN 6 pieds à 5 conducteurs avec un connecteur à angle droit
7,05 1 DigiKey 839-1078-ND Pour raccorder au moteur d’ascension droite. Utiliser le câble original du EQ3 si non disponible.
Câble DIN 6 pieds à 6 conducteurs avec un connecteur à angle droit
7,05 1 DigiKey 839-1079-ND Pour raccorder au moteur de déclinaison. Peut être remplacé par mini-din ou autre type si non disponible.
Câble plat 6 pouces de longueur à 10 conducteurs avec connecteurs 2X5
1,14 1 DigiKey H3AAS-1006G-ND Pour relier les cartes mères ALCYONE-2 et ELECTRA-2.
Résistances 10K ¼watt 0,05 chacune
2 DigiKey CF14JT10K0CT-ND Dans le circuit de la manette simple.
Câble modulaire 6 conducteurs RJ12 avec connecteur à un bout
3,10 1 DigiKey A3662R-05C-ND Pour raccorder la manette simple au contrôleur.
Motorisation d’une monture EQ3
Le montage et les tests 25
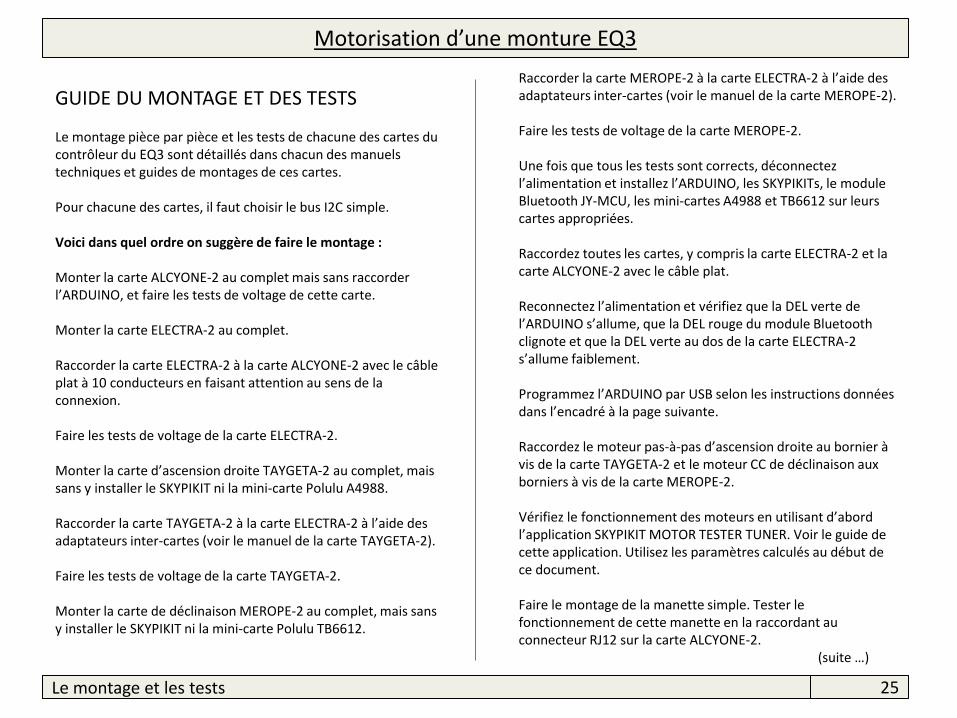
GUIDE DU MONTAGE ET DES TESTS Le montage pièce par pièce et les tests de chacune des cartes du contrôleur du EQ3 sont détaillés dans chacun des manuels techniques et guides de montages de ces cartes. Pour chacune des cartes, il faut choisir le bus I2C simple. Voici dans quel ordre on suggère de faire le montage : Monter la carte ALCYONE-2 au complet mais sans raccorder l’ARDUINO, et faire les tests de voltage de cette carte. Monter la carte ELECTRA-2 au complet. Raccorder la carte ELECTRA-2 à la carte ALCYONE-2 avec le câble plat à 10 conducteurs en faisant attention au sens de la connexion. Faire les tests de voltage de la carte ELECTRA-2. Monter la carte d’ascension droite TAYGETA-2 au complet, mais sans y installer le SKYPIKIT ni la mini-carte Polulu A4988. Raccorder la carte TAYGETA-2 à la carte ELECTRA-2 à l’aide des adaptateurs inter-cartes (voir le manuel de la carte TAYGETA-2). Faire les tests de voltage de la carte TAYGETA-2. Monter la carte de déclinaison MEROPE-2 au complet, mais sans y installer le SKYPIKIT ni la mini-carte Polulu TB6612.
Raccorder la carte MEROPE-2 à la carte ELECTRA-2 à l’aide des adaptateurs inter-cartes (voir le manuel de la carte MEROPE-2). Faire les tests de voltage de la carte MEROPE-2. Une fois que tous les tests sont corrects, déconnectez l’alimentation et installez l’ARDUINO, les SKYPIKITs, le module Bluetooth JY-MCU, les mini-cartes A4988 et TB6612 sur leurs cartes appropriées. Raccordez toutes les cartes, y compris la carte ELECTRA-2 et la carte ALCYONE-2 avec le câble plat. Reconnectez l’alimentation et vérifiez que la DEL verte de l’ARDUINO s’allume, que la DEL rouge du module Bluetooth clignote et que la DEL verte au dos de la carte ELECTRA-2 s’allume faiblement. Programmez l’ARDUINO par USB selon les instructions données dans l’encadré à la page suivante. Raccordez le moteur pas-à-pas d’ascension droite au bornier à vis de la carte TAYGETA-2 et le moteur CC de déclinaison aux borniers à vis de la carte MEROPE-2. Vérifiez le fonctionnement des moteurs en utilisant d’abord l’application SKYPIKIT MOTOR TESTER TUNER. Voir le guide de cette application. Utilisez les paramètres calculés au début de ce document. Faire le montage de la manette simple. Tester le fonctionnement de cette manette en la raccordant au connecteur RJ12 sur la carte ALCYONE-2. (suite …)
Motorisation d’une monture EQ3
Programmation du ARDUINO 26
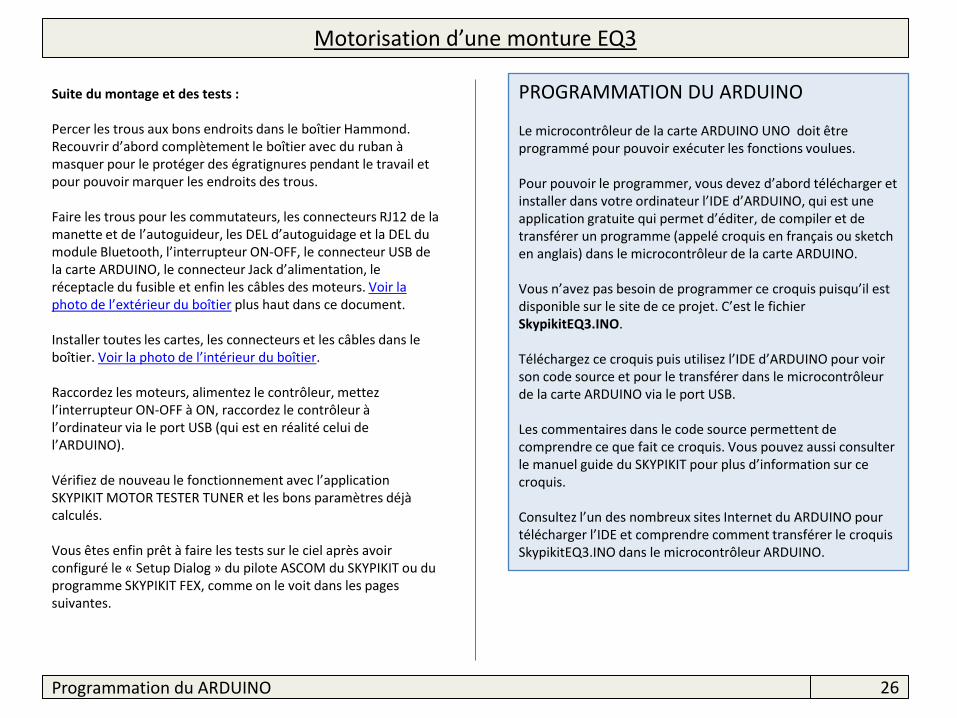
Suite du montage et des tests : Percer les trous aux bons endroits dans le boîtier Hammond. Recouvrir d’abord complètement le boîtier avec du ruban à masquer pour le protéger des égratignures pendant le travail et pour pouvoir marquer les endroits des trous. Faire les trous pour les commutateurs, les connecteurs RJ12 de la manette et de l’autoguideur, les DEL d’autoguidage et la DEL du module Bluetooth, l’interrupteur ON-OFF, le connecteur USB de la carte ARDUINO, le connecteur Jack d’alimentation, le réceptacle du fusible et enfin les câbles des moteurs. Voir la photo de l’extérieur du boîtier plus haut dans ce document. Installer toutes les cartes, les connecteurs et les câbles dans le boîtier. Voir la photo de l’intérieur du boîtier. Raccordez les moteurs, alimentez le contrôleur, mettez l’interrupteur ON-OFF à ON, raccordez le contrôleur à l’ordinateur via le port USB (qui est en réalité celui de l’ARDUINO). Vérifiez de nouveau le fonctionnement avec l’application SKYPIKIT MOTOR TESTER TUNER et les bons paramètres déjà calculés. Vous êtes enfin prêt à faire les tests sur le ciel après avoir configuré le « Setup Dialog » du pilote ASCOM du SKYPIKIT ou du programme SKYPIKIT FEX, comme on le voit dans les pages suivantes.
PROGRAMMATION DU ARDUINO Le microcontrôleur de la carte ARDUINO UNO doit être programmé pour pouvoir exécuter les fonctions voulues. Pour pouvoir le programmer, vous devez d’abord télécharger et installer dans votre ordinateur l’IDE d’ARDUINO, qui est une application gratuite qui permet d’éditer, de compiler et de transférer un programme (appelé croquis en français ou sketch en anglais) dans le microcontrôleur de la carte ARDUINO. Vous n’avez pas besoin de programmer ce croquis puisqu’il est disponible sur le site de ce projet. C’est le fichier SkypikitEQ3.INO. Téléchargez ce croquis puis utilisez l’IDE d’ARDUINO pour voir son code source et pour le transférer dans le microcontrôleur de la carte ARDUINO via le port USB. Les commentaires dans le code source permettent de comprendre ce que fait ce croquis. Vous pouvez aussi consulter le manuel guide du SKYPIKIT pour plus d’information sur ce croquis. Consultez l’un des nombreux sites Internet du ARDUINO pour télécharger l’IDE et comprendre comment transférer le croquis SkypikitEQ3.INO dans le microcontrôleur ARDUINO.
Motorisation d’une monture EQ3
Ajustement des paramètres de contrôle (en ascension droite) 27
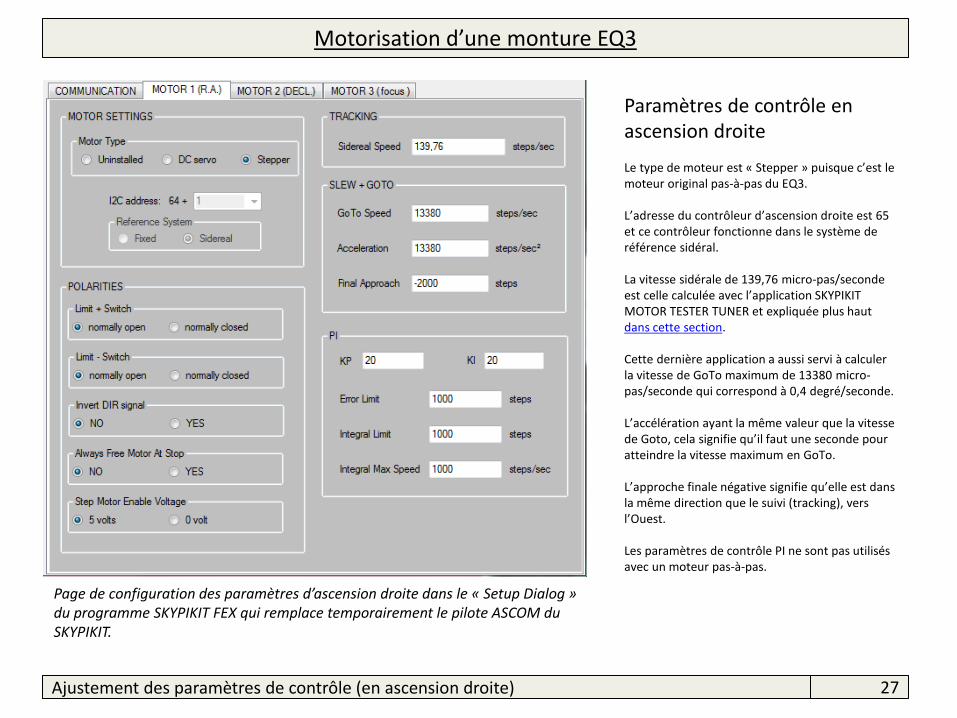
Paramètres de contrôle en ascension droite Le type de moteur est « Stepper » puisque c’est le moteur original pas-à-pas du EQ3. L’adresse du contrôleur d’ascension droite est 65 et ce contrôleur fonctionne dans le système de référence sidéral. La vitesse sidérale de 139,76 micro-pas/seconde est celle calculée avec l’application SKYPIKIT MOTOR TESTER TUNER et expliquée plus haut dans cette section. Cette dernière application a aussi servi à calculer la vitesse de GoTo maximum de 13380 micro-pas/seconde qui correspond à 0,4 degré/seconde. L’accélération ayant la même valeur que la vitesse de Goto, cela signifie qu’il faut une seconde pour atteindre la vitesse maximum en GoTo. L’approche finale négative signifie qu’elle est dans la même direction que le suivi (tracking), vers l’Ouest. Les paramètres de contrôle PI ne sont pas utilisés avec un moteur pas-à-pas.
Page de configuration des paramètres d’ascension droite dans le « Setup Dialog » du programme SKYPIKIT FEX qui remplace temporairement le pilote ASCOM du SKYPIKIT.
Motorisation d’une monture EQ3
Ajustement des paramètres de contrôle (en déclinaison) 28
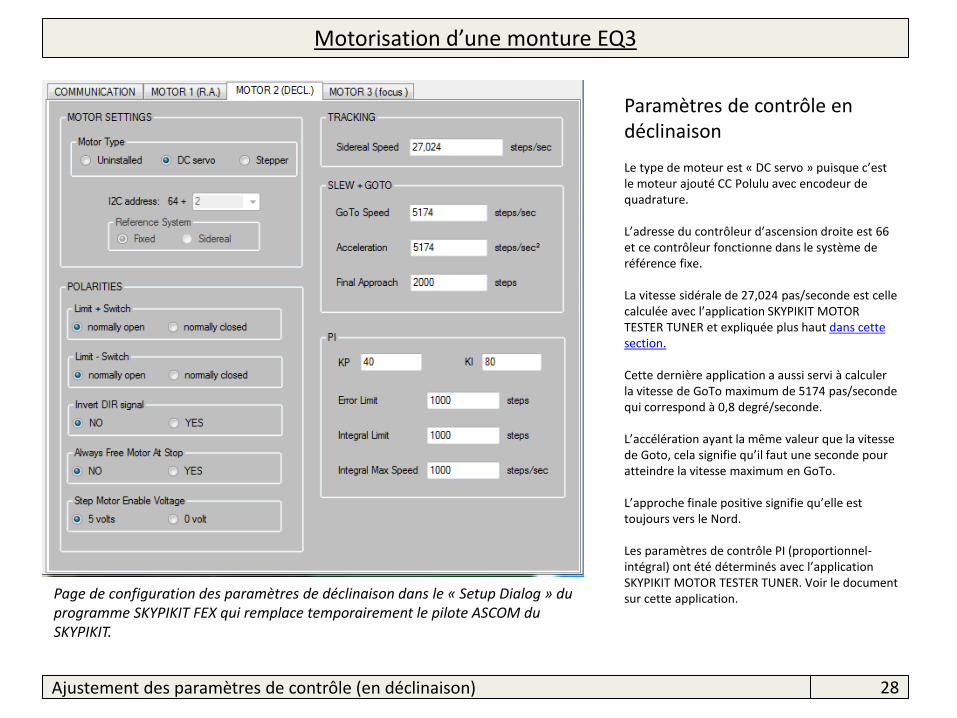
Paramètres de contrôle en déclinaison Le type de moteur est « DC servo » puisque c’est le moteur ajouté CC Polulu avec encodeur de quadrature. L’adresse du contrôleur d’ascension droite est 66 et ce contrôleur fonctionne dans le système de référence fixe. La vitesse sidérale de 27,024 pas/seconde est celle calculée avec l’application SKYPIKIT MOTOR TESTER TUNER et expliquée plus haut dans cette section. Cette dernière application a aussi servi à calculer la vitesse de GoTo maximum de 5174 pas/seconde qui correspond à 0,8 degré/seconde. L’accélération ayant la même valeur que la vitesse de Goto, cela signifie qu’il faut une seconde pour atteindre la vitesse maximum en GoTo. L’approche finale positive signifie qu’elle est toujours vers le Nord. Les paramètres de contrôle PI (proportionnel-intégral) ont été déterminés avec l’application SKYPIKIT MOTOR TESTER TUNER. Voir le document sur cette application. Page de configuration des paramètres de déclinaison dans le « Setup Dialog » du
programme SKYPIKIT FEX qui remplace temporairement le pilote ASCOM du SKYPIKIT.
Motorisation d’une monture EQ3
Monture complétée et tests d’autoguidage 29
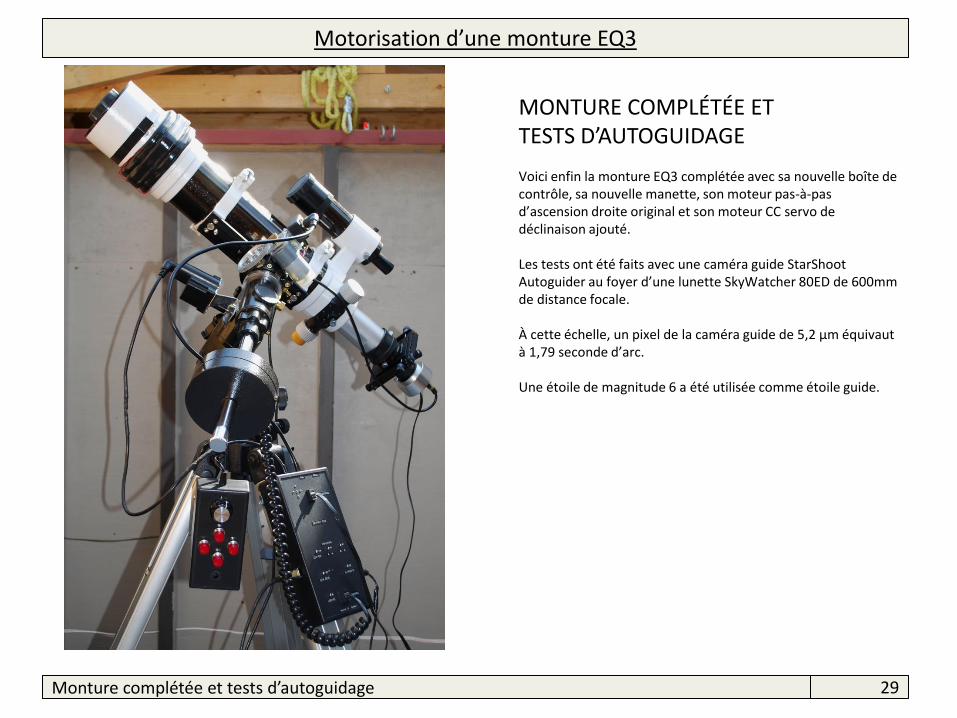
MONTURE COMPLÉTÉE ET TESTS D’AUTOGUIDAGE Voici enfin la monture EQ3 complétée avec sa nouvelle boîte de contrôle, sa nouvelle manette, son moteur pas-à-pas d’ascension droite original et son moteur CC servo de déclinaison ajouté. Les tests ont été faits avec une caméra guide StarShoot Autoguider au foyer d’une lunette SkyWatcher 80ED de 600mm de distance focale. À cette échelle, un pixel de la caméra guide de 5,2 µm équivaut à 1,79 seconde d’arc. Une étoile de magnitude 6 a été utilisée comme étoile guide.
Motorisation d’une monture EQ3
Tests d’autoguidage avec PHD2 Guiding 30
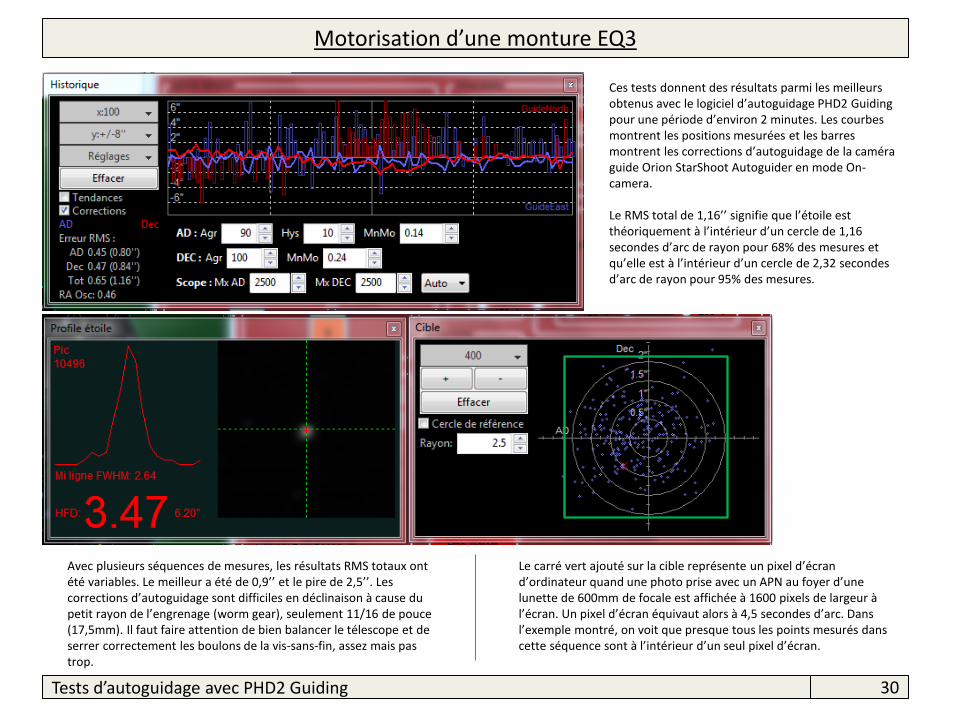
Ces tests donnent des résultats parmi les meilleurs obtenus avec le logiciel d’autoguidage PHD2 Guiding pour une période d’environ 2 minutes. Les courbes montrent les positions mesurées et les barres montrent les corrections d’autoguidage de la caméra guide Orion StarShoot Autoguider en mode On-camera. Le RMS total de 1,16’’ signifie que l’étoile est théoriquement à l’intérieur d’un cercle de 1,16 secondes d’arc de rayon pour 68% des mesures et qu’elle est à l’intérieur d’un cercle de 2,32 secondes d’arc de rayon pour 95% des mesures.
Avec plusieurs séquences de mesures, les résultats RMS totaux ont été variables. Le meilleur a été de 0,9’’ et le pire de 2,5’’. Les corrections d’autoguidage sont difficiles en déclinaison à cause du petit rayon de l’engrenage (worm gear), seulement 11/16 de pouce (17,5mm). Il faut faire attention de bien balancer le télescope et de serrer correctement les boulons de la vis-sans-fin, assez mais pas trop.
Le carré vert ajouté sur la cible représente un pixel d’écran d’ordinateur quand une photo prise avec un APN au foyer d’une lunette de 600mm de focale est affichée à 1600 pixels de largeur à l’écran. Un pixel d’écran équivaut alors à 4,5 secondes d’arc. Dans l’exemple montré, on voit que presque tous les points mesurés dans cette séquence sont à l’intérieur d’un seul pixel d’écran.
Motorisation d’une monture EQ3
Tests d’autoguidage avec PHD2 Guiding (suite) 31
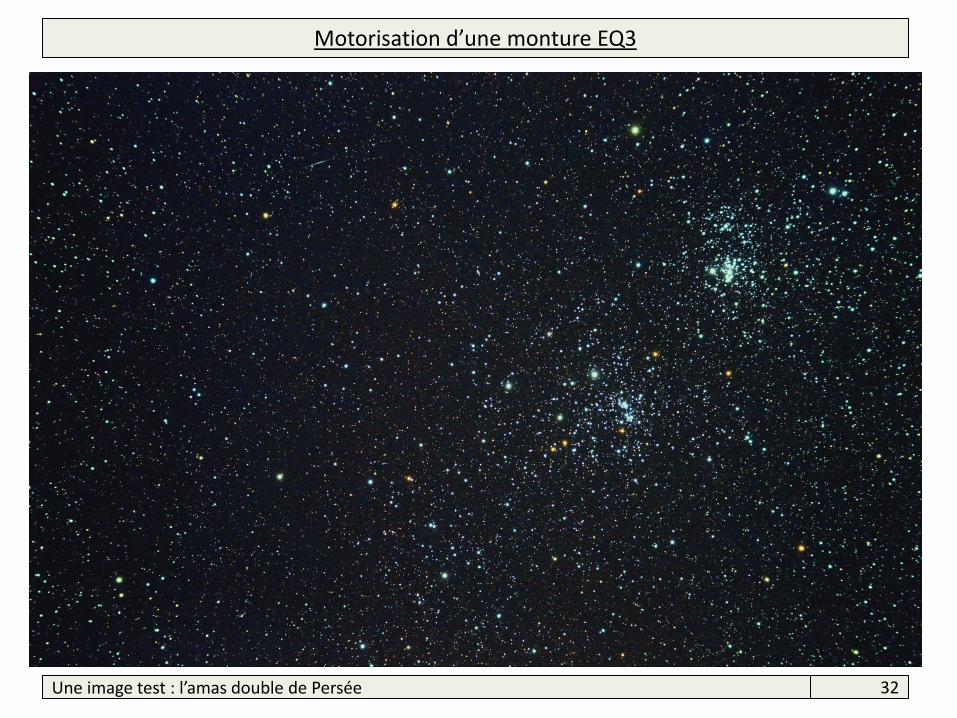
En conclusion, avec une focale de 600mm, malgré les dimensions réduites des engrenages de cette monture, on peut s’attendre à obtenir au moins 80% de très bonnes images brutes à empiler (stack) pour obtenir notre image résultante à traiter. La photo de la page suivante en est un exemple.
Paramètres de la photo : Photographe : Pedro Borquez. Télescope : Lunette ED 80 mm d’ouverture, 600 mm de focale. Caméra : APN Canon. Lunette guide : focale de 300 mm construction maison. Caméra guide : Orion StarShoot Autoguider. Captures : 9 poses de 240 secondes combinées avec l’application Deep Sky Stacker. Pollution lumineuse : Bortle = 6.
Motorisation d’une monture EQ3
Une image test : l’amas double de Persée 32
Motorisation d’une monture EQ3
FIN 33
FIN