Embed Size (px)
Citation preview

Numer. Math.DOI 10.1007/s00211-014-0690-5
NumerischeMathematik
Numerical Ricci–DeTurck flow
Hans Fritz
Received: 18 May 2013 / Revised: 15 September 2014© Springer-Verlag Berlin Heidelberg 2014
Abstract We present a numerical method for the computation of the n-dimensionalRicci–DeTurck flow. The Ricci flow is a partial differential equation (PDE) deform-ing a time-dependent metric on a closed Riemannian manifold in proportion to itsRicci curvature. The Ricci–DeTurck flow is a reparametrization of this flow using theharmonic map flow in order to get a strictly parabolic PDE. Our numerical methodis based on the assumption that the manifold is embeddable into R
n+1 as a differ-entiable manifold. By this means, it is possible to do computations in the Euclideancoordinates of the ambient space. A weak formulation of the Ricci–DeTurck flowis derived such that it only contains tangential gradients. A spatial discretization ofthis formulation with finite elements on polyhedral hypersurfaces and a semi-implicittime discretization lead to an algorithm for computing the Ricci–DeTurck flow. Wehave performed numerical tests for two- and three-dimensional hypersurfaces usingpiecewise linear finite elements. The generalization to non-orientable hypersurfacesof higher codimensions is still open.
Mathematics Subject Classification 35K55 · 65M60 · 65D99
1 Introduction
In 1982, the Ricci flow was introduced by Richard Hamilton [13]. Since then a well-developed theory of the Ricci flow has been established. In particular, the use of theRicci flow as an approach toward the geometrization conjecture has culminated in therecent breakthrough of Grigori Perelman [19–21]. In contrast to this development,the hitherto existing numerical studies of the Ricci flow are still restricted to special
H. Fritz (B)Mathematics Institute, University of Warwick, Zeeman Building, Coventry CV4 7AL, UKe-mail: [email protected]
123

H. Fritz
cases, see for example [11,12,22,26], and [16]. One reason for this situation is thefact that there is up to now no general formulation of the Ricci flow, which is open fora consistent finite element approach. This situation remains unsatisfactory even more,since there has been significant progress in the computation of geometric flows suchas the mean curvature flow and the Willmore flow [4,8]. Studying these geometricflows, a finite element method on triangulated hypersurfaces [5,7], which we will callthe surface finite element method in the following, has emerged as an adequate ansatzfor discretizing geometric PDEs on isometrically embedded hypersurfaces. The Ricciflow, however, seems to be even more challenging for a numerical treatment than othergeometric flows. The reason is that Ricci flow is an intrinsic flow and that it has notbeen clear up to now how to use the surface finite element method for the discretizationof intrinsic flows. Here, we propose a discretization method for geometric PDEs onhypersurfaces with arbitrary Riemannian metrics based on the surface finite elementmethod. Moreover, we develop a numerical scheme for the Ricci–DeTurck flow. Ourapproach is restricted to n-dimensional Riemannian manifolds (Γ, g) that are embed-ded as differentiable manifolds into the (n + 1)-dimensional Euclidean space, that isΓ ⊂ R
n+1. However, we do not suppose that the embedding is isometric with respectto the Euclidean metric. Instead, we define an extension of the Riemannian metric g onΓ to a Riemannian metric G on a tubular neighborhood Γδ ⊂ R
n+1 such that (Γ, g) isa Riemannian submanifold of the Riemannian manifold (Γδ, G). By this means, it ispossible to use Cartesian coordinates for the formulation of the Ricci–DeTurck flow,and furthermore, to use the surface finite element method with tangential gradientsfor the spatial discretization. This is the main advantage of our approach. Since theextension G is fully determined by an evolution equation on Γ , it can be computeddirectly by solving this equation. Hence, the extended metric G has to be determinedexplicitly only for the initial metric g0. Furthermore, the initial extension G0 is trivialfor all examples, for which the embedding (Γ, g0) is isometric with respect to theEuclidean metric. Since our approach is, in principle, not restricted to any codimen-sions, the embedding assumption can be always fulfilled according to the Whitneyembedding theorem by embedding into a higher-dimensional Euclidean space. Thereason why we concentrate on the Ricci–DeTurck flow here, instead of studying theRicci flow itself, is that the Ricci–DeTurck flow is strictly parabolic, see [6,14,24],whereas the Ricci flow is only weakly parabolic. Solving a special system of ordinarydifferential equations, the solution to the Ricci flow could, in principle, be recoveredfrom the solution to the Ricci–DeTurck flow, see [14]. This paper is organized asfollows.
– In Sect. 2, we first introduce the notations and preliminaries. In particular, we definethe extension G of the Riemannian metric g. In order to be able to reformulatethe Ricci–DeTurck flow in the Cartesian coordinates of the ambient space, weestablish the relation between the Cartesian components of the metric G and thelocal components of g. This is stated in Corollary 2. The content of this section canbe, in principle, applied to other settings involving the computation of Riemannianmetrics on hypersurfaces. For example, it opens the possibility to use surfacefinite elements with tangential gradients in solving Laplace–Beltrami equationson Riemannian manifolds.
123

Numerical Ricci–DeTurck flow
– In Sect. 3, we derive a weak formulation of the Ricci–DeTurck flow as an evolutionequation for the Cartesian components of the metric G on the hypersurface Γ . Itis essential for the spatial discretization in Sect. 4 that this weak formulationinvolves just tangential derivatives rather than derivatives with respect to a localparametrization. Since the metric G off the hypersurface Γ is constant in normaldirection, the evolution of G on the strip Γδ is fully determined by the evolution ofG on Γ . Hence, the weak formulation for the evolution of G on the hypersurfaceΓ leads to a well-posed problem.
– In Sect. 4, the weak formulation derived in Sect. 3 is discretized with piecewiselinear finite elements on polyhedral hypersurfaces. The time discretization is usedto linearize the problem in each time step. The proposed backward Euler schemefor the computation of the Ricci–DeTurck flow is completely new. Previous dis-cretizations, for example in [11,12], and [22], used one-dimensional formulationsin rotationally symmetric settings.
– In Sect. 5, numerical experiments are presented for two- and three-dimensionalhypersurfaces. Computations on a sphere demonstrate the convergence of thescheme to the exact solution. Away from the singularity the observed order ish2.
2 Notation and preliminaries
Let Γ ⊂ Rn+1 be a smooth, n-dimensional, compact, orientable and connected hyper-
surface in Rn+1 without boundary. We denote the Euclidean scalar product in R
n+1 bya dot, which means that X · Y = ∑n+1
α=1 XαYα . The Euclidean scalar product inducesa Riemannian metric on Γ , which we denote by g. According to the Jordan-Brouwerseparation theorem [18], there exists an open bounded domain U ⊂ R
n+1 such thatΓ = ∂U . The unit normal field that points away from U is denoted by ν. The tangentbundle and the tangent space at a ∈ Γ are T Γ and TaΓ . The projection on the tangentbundle T Γ is given by
P := 1 − ν ⊗ ν,
where ⊗ denotes the tensor product. The symmetric tensor product is denoted by ⊗S .The oriented Euclidean distance function d for Γ is defined such that d < 0 on U andd > 0 on R
n+1\U . Because Γ is supposed to be smooth and compact, it is possibleto choose δ > 0 sufficiently small such that the projection
a(x) = x − d(x)ν(x) ∈ Γ
is unique for all x ∈ Γδ := {x ∈ R
n+1 | |d(x)| < δ}, see [4] for more details. Obvi-
ously, the tubular neighborhood Γδ ⊂ Rn+1 together with the Euclidean metric is a
Riemannian manifold, for which (Γ, g) is a Riemannian submanifold. In the follow-ing, we regard a further smooth Riemannian metric g on Γ , which is supposed toevolve under the Ricci–DeTurck flow. In local coordinates this means that
∂
∂tgi j = −2Rci j + ∇i V j + ∇ j Vi , (1)
123

H. Fritz
where Rc and ∇ denote the Ricci curvature and the covariant derivative with respectto the metric g, and V is a tensor field which is locally given by
Vi := gi j glk
(Γ
jlk − Γ
jlk
).
Here, Γ ki j are the Christoffel symbols with respect to g, and Γ k
i j are the Christoffelsymbols with respect to a fixed but arbitrary Riemannian metric, which we now chooseto be the induced Riemannian metric g. The tensor fields in (1) depend on a parametert , which is usually interpreted as time, and on a space variable a. However, for thesake of simplicity, we often drop the dependence on (a, t) and just write g(·, ·) insteadof g(a, t)(·, ·). Respectively, in local coordinates we write gi j instead of gi j (a, t).The PDE (1) is strictly parabolic, see [24]. Hence, for a smooth metric g0, there existε > 0 and a unique solution g(t) to the Ricci–DeTurck flow (1) in the time interval[0, ε) such that g(0) = g0. Actually, the flow (1) can be used to prove the short-timeexistence and uniqueness of solutions to the Ricci flow. Solving the following systemof ordinary differential equations
∂Ψ
∂t= −V ∗ ◦ Ψ, with Ψ (0) = id,
where V ∗ is the vector field dual to V with respect to g, one can recover the solutiong := Ψ ∗g to the Ricci flow,
∂
∂tgi j = −2Rci j , (2)
where Rc is the Ricci curvature with respect to the metric g, see [3,14] for moredetails. In the following, let g(t) be a smooth family of Riemannian metrics solving(1) on a maximal time interval [0, T ). So far, we have made the following restrictionsconcerning the Ricci–DeTurck flow on a smooth, closed manifold M with smoothRiemannian metric g. We have implied that M is orientable and connected, and that itis embeddable into R
n+1, where the embedded hypersurface is denoted by Γ ⊂ Rn+1.
Furthermore, we have chosen the background metric in the Ricci–DeTurck flow to bethe induced metric g. However, the embedding of M is not supposed to be isometricwith respect to g, which means that in general g �= g. For computational purposes, weaim to avoid using local coordinates in our approach. We, therefore, define an extensionG of the Riemannian metric g to the tubular neighborhood Γδ such that (Γ, g) is aRiemannian submanifold of (Γδ, G). Since Γδ is an open subset of R
n+1, it has atrivial atlas, which only contains the identity map on Γδ . Thus, using the extension Ginstead of the metric g, it is possible to compute the Ricci–DeTurck flow (1) in theglobal coordinate frame of the ambient space R
n+1, that is in Cartesian coordinates.Next, we define the extension G to Γδ .
Definition 1 Let λ > 0 be a strictly positive, smooth function on Γ ×[0, T ). Further-more, let G(x, t) ∈ R
(n+1)×(n+1) with x ∈ Γδ and t ∈ [0, T ) be a family of smoothRiemannian metrics on Γδ , which is defined by
1. X · (G(a, t)Y ) := g(a, t) (P(a)X, P(a)Y ) + λ(a, t) (X · ν(a)) (Y · ν(a)),∀X, Y ∈ TaR
n+1, ∀(a, t) ∈ Γ × [0, T ),2. G(x, t) := G (a(x), t), ∀(x, t) ∈ Γδ × [0, T ).
123

Numerical Ricci–DeTurck flow
This definition is based on two simple ideas. First, G is defined on the hypersurfaceΓ in terms of the metric g and the projection P such that G coincides with the metricg on the tangent bundle of the hypersurface and such that the normal direction of thehypersurface with respect to the Euclidean metric coincides with the normal directionwith respect to G, see below for more details. Second, G off the hypersurface isdefined such that it is constant in normal direction to the hypersurface. This ensuresthat it is sufficient to compute the evolution of G on the hypersurface Γ instead ofcomputing the evolution of G on the strip Γδ . These ideas directly lead to the abovedefinition. The only degree of freedom remains the choice of the function λ. We willlater restrict to time-independent functions λ, and especially to the case λ(a, t) = 1,∀(a, t) ∈ Γ × [0, T ). However, we first stick to the general case. G is indeed aRiemannian metric on Γδ that induces g. This is stated by the following Corollary.
Corollary 1 Let G(x, t) ∈ R(n+1)×(n+1), for x ∈ Γδ and t ∈ [0, T ), be defined as
above, then
1. G(x, t) is symmetric and positive definite, ∀(x, t) ∈ Γδ × [0, T ),2. X · (G(a, t)Y ) = g(a, t)(X, Y ), ∀X, Y ∈ TaΓ , ∀(a, t) ∈ Γ × [0, T ),
that is g = G|T Γ ×T Γ ,3. G(a, t)ν(a) = λ(a, t)ν(a), ∀(a, t) ∈ Γ × [0, T ),4. G(a, t)X ∈ TaΓ , ∀X ∈ TaΓ , ∀(a, t) ∈ Γ × [0, T ).
Proof Let X ∈ TaRn+1\{0} be a tangential vector. We write this vector as a sum
of tangential and normal components, that is X = Xτ + Xν with Xτ = P X andXν = (X · ν) ν. Using this decomposition and the definition of G on the hypersurface,we conclude that
X · (G(a, t)X) = g(a, t) (Xτ , Xτ ) + λ(a, t)|Xν |2 > 0.
Therefore, G(x, t) = G(a(x), t) is positive definite ∀(x, t) ∈ Γδ × [0, T ). The sym-metry of G and the second point are obvious. The third and fourth property followfrom X · (G(a, t)ν(a)) = 0, ∀X ∈ TaΓ and ν(a) · (G(a, t)ν(a)) = λ(a, t). �
Remark 1 In the case that g(·, t) = g(·) and λ(·, t) = 1, the Riemannian metric G(·, t)is just given by G(·, t) = 1 on Γδ . For the sake of clarity, we keep the notation simple,and thus, do not distinguish between the (1, 1)-tensor G(x, t) and the Riemannianmetric defined by X · (G(x, t)Y ), for X, Y ∈ TxR
n+1, (x, t) ∈ Γδ × [0, T ). See alsoRemark 2.
Now, let ϕ : Ω → Rn+1 with Ω ⊂ R
n be a local parametrization of Γ and let{∂1, . . . , ∂n} be the corresponding local basis of the tangent bundle T Γ . Hereafter,Roman indices refer to this basis, whereas Greek indices refer to the standard basis{e1, . . . , en+1} of R
n+1. Furthermore, we make use of the Einstein summation con-vention so that repeated Roman indices have to be summed over 1 to n and repeatedGreek indices have to be summed over 1 to n + 1. We use the following notations forthe two Riemannian metrics on Γ
123

H. Fritz
gi j := g(∂i , ∂ j
),
(gi j
)
i, j=1,...,n:= (
gi j)−1
i, j=1,...,n ,
gi j := g(∂i , ∂ j
) = ∂ϕ
∂θ i· ∂ϕ
∂θ j,
(gi j
)
i, j=1,...,n:= (
gi j)−1
i, j=1,...,n .
For the Riemannian metric G on Γδ we define
Gαβ := eα · (Geβ
)and
(Gαβ
)α,β=1,...,n+1 := (
Gαβ
)−1α,β=1,...,n+1 .
Henceforward, we identify the tensor G(x, t) with the (n + 1) × (n + 1)-matrix(Gαβ(x, t))α,β=1,...,n+1. As a direct consequence of Corollary 1 the inverse G−1 issymmetric and positive definite. Furthermore, we have
G−1(a, t)ν(a) = 1
λ(a, t)ν(a) and G−1(a, t)X ∈ TaΓ, ∀X ∈ TaΓ. (3)
In order to reformulate the Ricci–DeTurck flow (1) as an evolution equation for theCartesian components of the metric G, we have to substitute the components gi j of themetric tensor g by the components Gαβ of the metric G. By this means, we move awayfrom local coordinates which is essential to the use of the surface finite element methodwith tangential gradients. Surprisingly, it will turn out below that it is already sufficientto compute the evolution of G on Γ and that the corresponding weak formulation forthe evolution of G on Γ is well-posed. This is due to the fact that the metric G isconstant in the normal direction to Γ . The following statement relates the Cartesiancomponents Gαβ of G to the local components gi j of g.
Corollary 2 Let Gαβ , gi j and gi j be as above, then the following relations hold
Gαβ (ϕ(θ), t) = ∂ϕα
∂θk(θ)gki (θ)gi j (θ, t)g jl(θ)
∂ϕβ
∂θ l(θ)
+ λ (ϕ(θ), t) να (ϕ(θ)) νβ (ϕ(θ)), (4)
Gαβ (ϕ(θ), t) = ∂ϕα
∂θk(θ)gkl(θ, t)
∂ϕβ
∂θ l(θ)
+ λ−1 (ϕ(θ), t) να (ϕ(θ)) νβ (ϕ(θ)). (5)
Proof Inserting P (ϕ(θ)) = gi j (ϕ(θ))∂ϕ
∂θ i (θ) ⊗ ∂ϕ
∂θ j (θ) into Definition 1 yields (4).
The formula for the inverse G−1 is then obvious. �Remark 2 Henceforward, the indices of a tensor on Γδ are raised or lowered withrespect to the Euclidean metric, which means that for example Xα = δαβ Xβ = Xα
and Xα = δαβ Xβ = Xα . For a symmetric tensor, such as the projection Pαβ = Pβα ,we write Pα
β = δαγ Pγβ instead of Pαβ = δαγ Pγβ , which would be the notation for
a nonsymmetric tensor. Please note that the indices of the metric tensor Gαβ are notraised, and that the indices of the inverse G−1 = (
Gαβ)α,β=1,...,n+1 are not lowered.
Therefore, Gαβ always denotes the components of the inverse G−1.
123

Numerical Ricci–DeTurck flow
We use ∇, ∇, Γ ki j , Γ
ki j , R, R, Rc, Rc, dσ , dσ to denote the covariant derivatives,
the Christoffel symbols, the Riemannian curvature tensors, the Ricci tensors and theRiemannian volume forms on Γ with respect to g and g, respectively. On Γδ we use thenotations D, D for the covariant derivatives and �
γαβ, �
γαβ for the Christoffel symbols
with respect to the Riemannian metric G and the Euclidean metric, respectively. TheChristoffel symbols on Γ are related to each other by
Γ ki j − Γ k
i j = 1
2gkm
(∇i gmj + ∇ j gmi − ∇m gi j
),
which one gets just by summing up the permutations of ∇i gmj = ∂i gmj − Γ lim gl j −
Γ li j glm . For the Christoffel symbols on Γδ an analogous result holds. Obviously, we
have �γαβ = 0, and therefore,
�γαβ − �
γαβ = �
γαβ = 1
2Gγ κ
(DαGκβ + DβGκα − Dκ Gαβ
).
According to Corollary 1 we have g = G|T Γ ×T Γ . Hence, the connection D on Γδ
determines the connection ∇ on Γ . To see this, we first introduce the normal spacewith respect to G, that is
NaΓ := {X ∈ TaΓδ | X · (G(a, t)Y )) = 0, ∀Y ∈ TaΓ } , ∀a ∈ Γ.
Since G(a, t)Y ∈ TaΓ for all Y ∈ TaΓ , we have
NaΓ = NaΓ, where
NaΓ := {X ∈ TaΓδ | X · Y = 0, ∀Y ∈ TaΓ } , ∀a ∈ Γ,
is the normal space with respect to the Euclidean metric. In particular, NaΓ does notdepend on t . As a result, the orthogonal projection tan : TaΓδ → TaΓ with respectto G is equal to the orthogonal projection ˜tan : TaΓδ → TaΓ with respect to theEuclidean scalar product. Thus, X tan = P(a)X , ∀X ∈ TaΓδ .
The tangential gradient of a function f : Γ → R with differentiable extension f ′to Γδ is defined by
∇Γ f := (D1 f, . . . , Dn+1 f
), with Dα f := Pβ
α Dβ f ′.
The tangential gradient in fact only depends on the values of f on Γ , see [4] for moredetails.
Next, let us recall that the Levi-Civita connection ∇ with respect to the metric g onΓ is the uniquely determined connection on the tangent bundle of Γ , which is torsion-free and which is compatible with g. Correspondingly, the Levi-Civita connectionD with respect to the metric G on Γδ is the uniquely determined connection on thetangent bundle of Γδ , which is torsion-free and which is compatible with G. Since themetric G is constructed such that it induces the metric g on Γ , the connection ∇ isinduced by the connection D. This is stated in the following result, which is crucialfor our further analysis.
123

H. Fritz
Proposition 1 Let X ∈ TaΓ and let Y be a differentiable tangent vector field on Γ
with a differentiable extension Y ′ to Γδ , then the Levi-Civita connection ∇X Y withrespect to g is given by
∇X Y = (DX Y ′)tan
. (6)
Proof This is a standard result in Riemannian geometry, see for example [17]. For thesake of completeness, we here give a sketch of a proof. By abuse of notation, we firstdefine ∇X Y := (
DX Y ′)tan. We then show that this is indeed the Levi-Civita connectionon Γ with respect to the metric g. The claim then follows from the uniqueness of theLevi-Civita connection. First, we show that this definition does not depend on theextension Y ′ to Γδ , that is
(DX Y ′)tan = P
(DX Y ′) = P
(Xα DαY ′ + �
γαβ XαY ′βeγ
)
= P(
Xα DαY ′ + �γαβ XαY βeγ
)
= P(Xα DαY
) + �γαβ XαY β
(Peγ
).
It is now easy to see that ∇X Y satisfies the product rule
∇X ( f Y ) = P(Xα Dα ( f Y )
) + �γαβ Xα ( f Y )β
(Peγ
)
= (Xα Dα f
)Y + f
(P
(Xα DαY
) + �γαβ XαY β
(Peγ
))
= (X · ∇Γ f ) Y + f ∇X Y.
Furthermore, the connection is compatible with the metric g
∇X (g (Y, Z)) = DX(Y ′ · (
G Z ′))
= (DX Y ′ · (
G Z ′)) + (Y ′ · (
G DX Z ′))
=((
DX Y ′)tan · (G Z ′)) +
(Y ′ ·
(G
(DX Z ′)tan
))
= g (∇X Y, Z) + g (Y,∇X Z),
where Z is a tangent vector field with extension Z ′. For a local parametrization ϕ :Ω → R
n+1 it is easy to show that
(∂ϕα
∂θ i◦ ϕ−1
)
Dα
(∂ϕ
∂θ j◦ ϕ−1
)
= ∂2ϕ
∂θ i∂θ j◦ ϕ−1.
Hence, ∇X Y is also torsion-free, which means that ∇∂i ∂ j = ∇∂ j ∂i . It follows that the
Levi-Civita connection with respect to g is indeed given by(DX Y ′)tan. �
As we have shown above,(DX Y ′)tan does not depend on the extension Y ′ to Γδ .
Moreover, it only depends on the values of G on Γ , which can be seen as follows.
123

Numerical Ricci–DeTurck flow
According to (3) we have G−1(a, t)W ∈ TaΓ for a tangent vector W ∈ TaΓ , andtherefore,
�γαβ XαY β Wγ = 1
2Gγ κ
(DαGκβ + DβGκα − Dκ Gαβ
)XαY β Wγ
= 1
2Gγ κ
(DαGκβ + DβGκα − Dκ Gαβ
)XαY β Wγ .
This motivates the following definition
�γαβ := 1
2Gγ κ
(DαGκβ + DβGκα − Dκ Gαβ
). (7)
Using this definition, we obtain
(DX Y ′)tan = P
(Xα DαY
) + �γαβ XαY β
(Peγ
).
According to this result and Proposition 1 we have
∇X Y = P(Xα DαY
) + �γαβ XαY β
(Peγ
). (8)
In the same manner, the Levi-Civita connection ∇ with respect to the induced metricg is determined by the connection D on Γδ
∇X Y =(
DX Y ′) ˜tan.
Again, the right hand side does not depend on the extension Y ′
∇X Y = P(
DX Y ′) = P(
Xα DαY ′) = P(Xα DαY
). (9)
Subtracting (9) from (8) gives
∇X Y − ∇X Y = �γαβ XαY β
(Peγ
). (10)
We use div and ˜div to denote the divergence with respect to g and g, respectively,which means that
div(X) := ∇i X i , (11)
˜div(X) := ∇i X i . (12)
123

H. Fritz
Lemma 1 Let X be a differentiable tangent vector field on Γ , then
div(X) = Dα Xα + Pαγ �
γαβ Xβ, (13)
˜div(X) = Dα Xα. (14)
Proof Inserting (8) into the definition (11) yields
div(X) = gik∇i X · ∂k = gik∇∂i X · ∂k
= gik(
P(∂α
i Dα X) + �
γαβ∂α
i Xβ(Peγ
))
δ∂δ
k
=(
P(Pαδ Dα X
) + �γαβ Pαδ Xβ
(Peγ
))
δ
= Pδγ
(Pαδ Dα Xγ
) + �γαβ Pαδ Xβ Pδγ
= Dα Xα + Pαγ �
γαβ Xβ,
where we have used P = gi j∂i ⊗ ∂ j . Similarly, formula (14) follows from (9). �Lemma 2 Let X, Y be differentiable tangent vector fields on Γ , then the followingformula holds
∇i Yj∇ j X i = (
DαY β + Pκα �β
κιYι) (
Dβ Xα + Pγβ �α
γ δ X δ).
Proof Using (8), we obtain
∇i Yj∇ j X i = gik g jl (∇i Y · ∂l)
(∇ j X · ∂k) = gik g jl (∇∂i Y · ∂l
) (∇∂ j X · ∂k)
= gik g jl((
P(∂κ
i DκY) + �β
κι∂κi Y ι
(Peβ
))ρ
∂ρl
)
×((
P(∂
γ
j Dγ X)
+ �αγδ∂
γ
j X δ (Peα))
σ∂σ
k
)
= (P
(Pκσ DκY
) + �βκι P
κσ Y ι(Peβ
))ρ
×(
P(
Pγρ Dγ X)
+ �αγδ Pγρ X δ (Peα)
)
σ
= (Pρβ Pκσ DκY β +�β
κι Pκσ Y ι Pρβ
) (Pσα Pγρ Dγ Xα+�α
γδ Pγρ X δ Pσα
)
= Pκα Pγ
β
(DκY β + �β
κιYι) (
Dγ Xα + �αγδ X δ
)
= (DαY β + Pκ
α �βκιY
ι) (
Dβ Xα + Pγβ �α
γ δ X δ).
�The extended Weingarten map (or shape operator) is defined by
S := ∇Γ ν. (15)
123

Numerical Ricci–DeTurck flow
It is easy to show that S is symmetric and that Sν = 0. The mean curvature H isdefined as the trace of this map,
H := ∇Γ · ν. (16)
Our definition differs from the more common definition of the mean curvature by afactor of n. It turns out to be very useful to represent the Ricci curvature tensors Rcand Rc in the coordinate frame of the ambient space R
n+1, that is
Rcαβ := Rc(Peα, Peβ
)and Rcαβ := Rc
(Peα, Peβ
).
With respect to this coordinate frame the once-contracted Gauss equation for the Riccicurvature Rc is
Rcαβ = H Sαβ − Sγα Sγβ, (17)
see [10]. A straightforward calculation gives the commutator relation for the tangentialgradient
Dα Dβ f − Dβ Dα f =(
Sγβ να − Sγ
α νβ
)Dγ f. (18)
3 Weak formulation of the Ricci–DeTurck flow
In the following, we derive a weak formulation of the second order operator
− 2Rci j + ∇i V j + ∇ j Vi , (19)
that does not make use of a local coordinate representation. Instead, all geometricquantities are represented in the Cartesian coordinates of the ambient space R
n+1. Thiskind of representation is essential in order to use the surface finite element methodwith tangential gradients. In Theorem 1, we reformulate the Ricci–DeTurck flow (1)as an evolution equation for the Cartesian components of the Riemannian metric Gon the hypersurface Γ . Since the evolution of the metric G on the strip Γδ is fullydetermined by the evolution of G on the hypersurface Γ , we obtain a well-posedproblem on Γ . The weak formulation serves as the starting point for the surface finiteelement discretization in Sect. 4.
Lemma 3 Let X, Y be tangent vector fields on Γ of class C2, then the Ricci curvaturesatisfies
Rc (Y, X) = div (∇Y X − div (X) Y ) + div (X) div (Y ) − ∇i Yj∇ j X i .
Proof See [10]. �
123

H. Fritz
Lemma 4 Let Vα := V (Peα), where V is the (0, 1)-tensor field on Γ defined by
Vi := gi j glk(Γ
jlk − Γ
jlk
). Then, we have
Vα = Gαρ Pρι Gκγ Pβ
κ �ιβγ (20)
Proof Using the definitions, we obtain
Vα = V (Peα) = Vi gim (Peα) · ∂m
= gi j glk
(Γ
jlk − Γ
jlk
)gim (∂m)α
= gi j glk
(∇∂l ∂k − ∇∂l ∂k
) jgim (∂m)α
= gi j glk
(∇∂l ∂k − ∇∂l ∂k
)
κg jn∂κ
n gim (∂m)α .
According to Corollary 2 we have PκρGρα = ∂κn gnj g ji gim (∂m)α . Together with
formula (10) it follows that
Vα = glk�ιβγ ∂
βl ∂
γ
k (Peι)κ PκρGρα = �ιβγ
(PG−1
)βγ
Pρι Gρα
= Gαρ Pρι Gκγ Pβ
κ �ιβγ ,
where we have used PG−1 = glk∂l ⊗ ∂k , see Corollary 2. �Corollary 3 Let Vα be as above, then the following formula holds
(Pα
δ
(Pβ
γ �γαβ + Vα
))=
(Pα
δ Gβγ DβGγα
).
Proof Using (20), we obtain
Pαδ Vα = Pα
δ Gαρ Pρι Gκγ Pβ
κ �ιβγ
= 12 Pα
δ Gαρ Pρι Gκγ Pβ
κ Gισ(
DβGσγ + Dγ Gσβ − Dσ Gβγ
)
= Pσδ Gκγ Pβ
κ
(DβGσγ − 1
2 Dσ Gβγ
)
= Pσδ Gβγ DβGσγ − 1
2 Gκγ Pβκ DδGβγ ,
since PG−1 = G−1 − 1λν ⊗ ν is symmetric and PG PG−1 = P . We also have
Pαδ Pβ
γ �γαβ = 1
2 Pαδ Pβ
γ Gγ κ(
DαGκβ + DβGκα − Dκ Gαβ
)= 1
2 Pβγ Gγ κ DδGκβ, so
that(Pα
δ
(Pβ
γ �γαβ + Vα
)) = Pσδ Gβγ DβGσγ . �
Using the above results, we can prove the following weak formulation for the secondorder elliptic operator (19).
123

Numerical Ricci–DeTurck flow
Lemma 5 Let X, Y be tangent vector fields on Γ of class C2 and let Vi :=gi j glk
(Γ
jlk − Γ
jlk
), then
2∫
Γ
Rci j Xi Y j dσ −∫
Γ
(∇i V j + ∇ j Vi)
Xi Y j dσ
=∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W ιδdσ + 2∫
Γ
(Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ GκδW ιδdσ
+∫
Γ
Pγβ Gβρ Pκ
α Gασ(2DιGρσ Dγ Gκδ − Dγ Gρκ Dσ Gιδ − Dκ Gρι Dγ Gσδ
+Dκ Gρι Dσ Gγ δ − 12 DιGρκ DδGσγ
)W ιδdσ ,
where W = 12 (X ⊗ Y + Y ⊗ X) ∈ C∞ (Γ, T Γ ⊗S T Γ ) is the symmetrized tensor
product of X and Y , and S = ∇Γ ν is the shape operator.
Proof First, we choose Y = X and integrate with respect to the induced surfacemeasure dσ . It then follows from Lemmas 1 and 3 that
∫
Γ
Rci j Xi X j dσ −∫
Γ
(∇i V j)
Xi X j dσ
=∫
Γ
div (∇X X − div(X)X) dσ +∫
Γ
div(X)div(X) − ∇i X j∇ j X i dσ
−∫
Γ
∇X (V (X)) − V (∇X X) dσ
=∫
Γ
Dα (∇X X − div(X)X)α + Pβγ �
γαβ (∇X X − div(X)X)α dσ
+∫
Γ
div(X)div(X) − ∇i X j∇ j X i dσ −∫
Γ
Xα Dα (V (X)) − Vα (∇X X)α dσ
=∫
Γ
Pβγ �
γαβ (∇X X − div(X)X)α dσ +
∫
Γ
div(X)div(X) − ∇i X j∇ j X i dσ
+∫
Γ
V (X)Dα Xα + Vα (∇X X)α dσ ,
where we have applied Gauss’ theorem. Simplifying and applying Lemmas 1 and 2,as well as formula (8), we obtain
∫
Γ
Rci j Xi X j dσ −∫
Γ
(∇i V j)
Xi X j dσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)(∇X X)α dσ +
∫
Γ
div(X)(
div(X) − Pβγ �
γαβ Xα
)dσ
−∫
Γ
∇i X j∇ j X i dσ +∫
Γ
V (X)Dα Xαdσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)(∇X X)α dσ −
∫
Γ
∇i X j∇ j X i dσ
123

H. Fritz
+∫
Γ
(V (X) + div(X)) Dι Xιdσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ
(X ι Dι X
δ + �δικ X ι Xκ
)dσ
−∫
Γ
(Dα Xβ + Pκ
α �βκι X
ι) (
Dβ Xα + Pγβ �α
γ δ X δ)
dσ
+∫
Γ
((Pβ
γ �γαβ + Vα
)Xα + Dα Xα
)Dι X
ιdσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ
(Dι
(X ι X δ
) + �δικ X ι Xκ
)dσ
−∫
Γ
Pγβ �α
γ δ X δ Dα Xβ + Pκα �β
κι Xι Dβ Xα + Pκ
α �βκι P
γβ �α
γ δ X δ X ιdσ
+∫
Γ
Dα Xα Dι Xι − Dα Xβ Dβ Xαdσ .
Inserting Yano’s formula [29] for the induced Ricci curvature Rc, that is
∫
Γ
Rcαβ Xα Xβdσ =∫
Γ
Dα Xα Dι Xι − Dα Xβ Dβ Xαdσ ,
see also [10], and the definition W := X ⊗ X , we obtain
∫
Γ
Rci j Xi X j dσ −∫
Γ
(∇i V j)
Xi X j dσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ
(Dι
(X ι X δ
) + �δικ X ι Xκ
)dσ
−∫
Γ
Pγβ �α
γ δ Pδκ Dα
(Xβ Xκ
) + Pκα �β
κι Pγβ �α
γ δ X δ X ιdσ +∫
Γ
Rcαβ Xα Xβdσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ
(DιW
ιδ + �δικ W ικ
)dσ
−∫
Γ
Pγβ �α
γ δ Pδκ DαW βκ + Pκ
α �βκι P
γβ �α
γ δW ιδdσ +∫
Γ
Rcαβ W αβdσ . (21)
Applying Gauss’ theorem, Corollary 3 and the commutator relation (18), it followsthat
∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ DιWιδdσ
= −∫
Γ
Dι
(Pα
δ
(Pβ
γ �γαβ + Vα
))W ιδdσ
= −∫
Γ
Dι
(Pα
δ Gβγ DβGγα
)W ιδdσ
= −∫
Γ
Dι
(Pα
δ Gβγ)
DβGγαW ιδdσ −∫
Γ
Pαδ Gβγ Dβ DιGγαW ιδdσ
123

Numerical Ricci–DeTurck flow
−∫
Γ
Pαδ Gβγ
(Sκβνι − Sκ
ι νβ
)Dκ GγαW ιδdσ
= −∫
Γ
Dι
(Pα
δ Gβγ)
DβGγαW ιδdσ +∫
Γ
Dβ
(Pα
δ Gβγ)
DιGγαW ιδdσ
−∫
Γ
Dβ
(Pα
δ Gβγ DιGγα
)W ιδdσ +
∫
Γ
Pαδ Gβγ Sκ
ι νβ Dκ GγαW ιδdσ ,
since νιW ιδ = 0. Integration by parts yields
∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ DιWιδdσ
=∫
Γ
(Dβ Pα
δ DιGγα − Dι Pαδ DβGγα
)Gβγ W ιδdσ
+∫
Γ
(DβGβγ DιGγα − DιG
βγ DβGγα
)Pα
δ W ιδdσ
+∫
Γ
Pαδ Gβγ DιGγα Dβ W ιδdσ +
∫
Γ
Pαδ Gβγ
(Sκι − Hδκ
ι
)νβ Dκ GγαW ιδdσ
=∫
Γ
(−Sβδν
α DιGγα + Sιδνα DβGγα
)Gβγ W ιδdσ
+∫
Γ
(DβGβγ Pκ
γ DιGκδ − DιGβγ Pκ
γ DβGκδ
)W ιδdσ
+∫
Γ
(DβGβγ νγ νκ DιGκδ − DιG
βγ νγ νκ DβGκδ
)W ιδdσ
+∫
Γ
Pαδ Gβγ DιGγα Dβ W ιδdσ +
∫
Γ
(Sκι − Hδκ
ι
)νβ Dκ Gγ δGβγ W ιδdσ .
(22)
Next, we calculate the following integrands separately
T1 :=(−Sβδν
α DιGγα + Sιδνα DβGγα
)Gβγ W ιδ
=(−Sβδ Dι
(Gγανα
) + Sβδ Sαι Gγα + Sιδ Dβ
(Gγανα
) − Sιδ Sαβ Gγα
)Gβγ W ιδ
=(−Sβδ Dι
(λνγ
) + Sβδ Sαι Gγα + Sιδ Dβ
(λνγ
) − Sιδ Sαβ Gγα
)Gβγ W ιδ
= ( − Sβδ
(Dιλνγ + λSιγ
)Gβγ + Sαδ Sα
ι
+ Sιδ
(Dβλνγ + λSβγ
)Gβγ − Sιδ Sα
α
)W ιδ
= ( − 1λνβ Sβδ Dιλ + 1
λνβ Sιδ Dβλ + λ
(Sιδ Sβγ − Sβδ Sιγ
)Gβγ
+ Sαδ Sαι − H Sιδ
)W ιδ
= (λ
(Sιδ Sβγ − Sβδ Sιγ
)Gβγ + Sαδ Sα
ι − H Sιδ
)W ιδ, (23)
where we have used definitions (15) and (16), formula (3) and νβ Sβδ = 0. Using thesame arguments, we also obtain
123

H. Fritz
T2 :=(
DβGβγ νγ νκ DιGκδ − DιGβγ νγ νκ DβGκδ
)W ιδ
=( (
Dβ
(Gβγ νγ
) − Gβγ Sβγ
) (Dι
(νκ Gκδ
) − Gκδ Sκι
)
− (Dι
(Gβγ νγ
) − Gβγ Sιγ
) (Dβ
(νκ Gκδ
) − Gκδ Sκβ
) )
W ιδ
=( (
Dβ
( 1λνβ
) − Gβγ Sβγ
) (Dι (λνδ) − Gκδ Sκ
ι
)
− (Dι
( 1λνβ
) − Gβγ Sιγ
) (Dβ (λνδ) − Gκδ Sκ
β
) )
W ιδ
=(
( 1λ
Sββ − Gβγ Sβγ
) (λSιδ − Gκδ Sκ
ι
)
− ( 1λ
Sβι − Gβγ Sιγ
) (λSβδ − Gκδ Sκ
β
) )
W ιδ,
since W ιδνδ = 0. Simplifying yields
T2 = (H Sιδ − Sβ
ι Sβδ + λ(Sιγ Sβδ − Sβγ Sιδ
)Gβγ
− 1λ
(H Sκ
ι − Sβι Sκ
β
)Gκδ +
(Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ Gκδ
)W ιδ. (24)
Similarly,
T3 := (Sκι − Hδκ
ι
)νβ Dκ Gγ δGβγ W ιδ = 1
λ
(Sκι − Hδκ
ι
)Dκ Gγ δν
γ W ιδ
= 1λ
(Sκι − Hδκ
ι
) (Dκ
(Gγ δν
γ) − Gγ δ Sγ
κ
)W ιδ
= 1λ
(Sκι − Hδκ
ι
) (Dκ (λνδ) − Gγ δ Sγ
κ
)W ιδ
= 1λ
(Sκι − Hδκ
ι
) (Dκλνδ + λSκδ − Gγ δ Sγ
κ
)W ιδ
= 1λ
(Sκι − Hδκ
ι
) (λSκδ − Gγ δ Sγ
κ
)W ιδ
= (Sκι Sκδ − H Sιδ + 1
λ
(H Sγ
ι − Sκι Sγ
κ
)Gγ δ
)W ιδ. (25)
Combining (23), (24) and (25) and applying the contracted Gauss-Codazzi equation(17), we obtain
T1 + T2 + T3 =((
Sβγ Sκι − Sιγ Sκ
β
)Gβγ Gκδ + Sκ
ι Sκδ − H Sιδ
)W ιδ
=((
Sβγ Sκι − Sιγ Sκ
β
)Gβγ Gκδ − Rcιδ
)W ιδ.
Inserting this result into (22) gives
∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ DιWιδdσ
=∫
Γ
((Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ Gκδ − Rcιδ
)W ιδdσ
+∫
Γ
(DβGβγ Pκ
γ DιGκδ−DιGβγ Pκ
γ DβGκδ
)W ιδ+Pα
δ Gβγ DιGγα Dβ W ιδdσ .
(26)
123

Numerical Ricci–DeTurck flow
Using the definition (7) and the symmetry of W ιδ , it follows that
∫
Γ
Pγβ �α
γ δ Pδκ DαW βκdσ =
∫
Γ
Pκι �β
κα Pαδ Dβ W ιδdσ
= 12
∫
Γ
Pκι Pα
δ Gβγ(
Dκ Gγα + DαGγ κ − Dγ Gακ
)Dβ W ιδdσ
=∫
Γ
Pκι Pα
δ Gβγ Dκ Gγα Dβ W ιδdσ − 12
∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W ιδdσ
=∫
Γ
Pαδ Gβγ DιGγα Dβ W ιδdσ − 1
2
∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W ιδdσ . (27)
Substituting (26) and (27) into (21) gives
∫
Γ
Rci j Xi X j dσ −∫
Γ
(∇i V j)
Xi X j dσ
=∫
Γ
(Pβ
γ �γαβ + Vα
)Pα
δ �δικ W ικdσ +
∫
Γ
(Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ GκδW ιδdσ
+∫
Γ
(DβGβγ Pκ
γ DιGκδ − DιGβγ Pκ
γ DβGκδ
)W ιδdσ
+ 12
∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W ιδdσ −∫
Γ
Pκα �β
κι Pγβ �α
γ δW ιδdσ
= 12
∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W ιδdσ +∫
Γ
(Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ GκδW ιδdσ
+∫
Γ
( (Pβ
γ �γαβ + Vα
)Pα
κ �κιδ + DβGβγ Pκ
γ DιGκδ
− DιGβγ Pκ
γ DβGκδ − Pκα �β
κι Pγβ �α
γ δ
)W ιδdσ . (28)
From Corollary 3 and definition (7) we have
(T4)ιδ :=(
Pβγ �
γαβ + Vα
)Pα
κ �κιδ
= Pακ Gβγ DβGγα�κ
ιδ
= 12 Pα
κ Gβγ Gκσ DβGγα
(DιGσδ + DδGσ ι − Dσ Gιδ
)
= 12 Gβρ Pκ
α Gασ DβGρκ
(DιGσδ + DδGσ ι − Dσ Gιδ
).
On the other hand,
(T5)ιδ := DβGβγ Pκγ DιGκδ − DιG
βγ Pκγ DβGκδ
= −Gβρ Pκγ Gγ σ
(DβGρσ DιGκδ − DιGρσ DβGκδ
)
= −Gβρ Pκα Gασ
(DβGρσ DιGκδ − DιGρσ DβGκδ
).
123

H. Fritz
Together we get
(T4 + T5)ιδ W ιδ = 12 Gβρ Pκ
α Gασ DβGρκ
(2DιGσδ − Dσ Gιδ
)W ιδ
− Gβρ Pκα Gασ
(DβGρσ DιGκδ − DιGρσ DβGκδ
)W ιδ
= Gβρ Pκα Gασ
(DβGρκ DιGσδ − DβGρσ DιGκδ
+ DιGρσ DβGκδ − 12 DβGρκ Dσ Gιδ
)W ιδ
= Gβρ Pκα Gασ
(DιGρσ DβGκδ − 1
2 DβGρκ Dσ Gιδ
)W ιδ
= Pγβ Gβρ Pκ
α Gασ(
DιGρσ Dγ Gκδ − 12 Dγ Gρκ Dσ Gιδ
)W ιδ, (29)
where we have used the symmetry of PG−1, that is Pκα Gασ = Pσ
α Gακ . The samereasoning leads to
Pκα �β
κι Pγβ �α
γ δ
= 14 Pκ
α Gβρ(Dκ Gρι + DιGρκ − DρGκι
)Pγ
β Gασ(
Dγ Gσδ + DδGσγ − Dσ Gγ δ
)
= 14
(PG−1
)γρ (PG−1
)κσ (Dκ Gρι + DιGρκ − DρGκι
)
×(
Dγ Gσδ + DδGσγ − Dσ Gγ δ
)
= 14 (PG−1)γρ(PG−1)κσ
(2Dκ Gρι Dγ Gσδ−2Dκ Gρι Dσ Gγ δ+DιGρκ DδGσγ
)
= 14 Pγ
β Gβρ Pκα Gασ
(2Dκ Gρι Dγ Gσδ − 2Dκ Gρι Dσ Gγ δ + DιGρκ DδGσγ
).
(30)
Substituting (29) and (30) into (28) then yields
∫
Γ
Rci j Xi X j dσ −∫
Γ
(∇i V j)
Xi X j dσ
= 12
∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W ιδdσ +∫
Γ
(Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ GκδW ιδdσ
+∫
Γ
Pγβ Gβρ Pκ
α Gασ(DιGρσ Dγ Gκδ − 1
2 Dγ Gρκ Dσ Gιδ − 12 Dκ Gρι Dγ Gσδ
+ 12 Dκ Gρι Dσ Gγ δ − 1
4 DιGρκ DδGσγ
)W ιδdσ .
Finally, since (19) is symmetric, polarization completes the proof of the claim. �Theorem 1 Let λ : Γ → (0,∞) be a strictly positive, smooth function on Γ and letG0 be the Riemannian metric on Γδ with
X · (G0(a)Y ) = g0(a) (P(a)X, P(a)Y ) + λ(a) (X · ν(a)) (Y · ν(a)) ,
∀X, Y ∈ TaRn+1,∀a ∈ Γ, and G0(x) = G0(a(x)), ∀x ∈ Γδ,
123

Numerical Ricci–DeTurck flow
where g0 is a given smooth metric on Γ . Then there exist T > 0 and a smooth familyof Riemannian metrics G(t) with t ∈ [0, T ) on Γδ such that
0 =∫
Γ
∂
∂tGιδW ιδdσ +
∫
Γ
Pκι Pα
δ Gβγ Dγ Gακ Dβ W tan ιδdσ
+2∫
Γ
(Sβγ Sκ
ι − Sιγ Sκβ
)Gβγ GκδW tan ιδdσ
+∫
Γ
Pγβ Gβρ Pκ
α Gασ(2DιGρσ Dγ Gκδ − Dγ Gρκ Dσ Gιδ − Dκ Gρι Dγ Gσδ
+Dκ Gρι Dσ Gγ δ − 12 DιGρκ DδGσγ
)W tan ιδdσ (31)
on (0, T ) for all smooth, symmetric tensor fields W : Γ → T Rn+1 ⊗S T R
n+1 andG(0) = G0, as well as G = G ◦a. The solution G is unique and the family of inducedmetrics g(t) := G(t)|T Γ ×T Γ for t ∈ [0, T ) on Γ is the solution to the Ricci–DeTurckflow (1) with g(0) = g0. If λ = 1 and g0 = g, which means that the initial metric isinduced by the embedding Γ ⊂ R
n+1, then G0 = 1.
Proof Since the Ricci–DeTurck flow (1) is strictly parabolic, see [6], there exist T > 0and a smooth family of Riemannian metrics g(t) for t ∈ [0, T ) such that g(t) is theunique solution to the Ricci–DeTurck flow (1) with g(0) = g0. We then define G(t)for t ∈ [0, T ) according to Definition 1. Thus, we have G(0) = G0 and G = G ◦ a.According to (4) we also have
∂
∂tGαβ (ϕ(θ), t) = ∂ϕα
∂θk(θ)gki (θ)
∂
∂tgi j (θ, t)g jl(θ)
∂ϕβ
∂θ l(θ)
= ∂ϕα
∂θk(θ)gki (θ)
(−2Rci j + ∇i V j + ∇ j Vi)(θ, t)g jl(θ)
∂ϕβ
∂θ l(θ).
(32)
Please note that in this theorem λ does not depend on t . Multiplying formula (32) byXαY β for X, Y ∈ C∞ (
Γ, T Rn+1
)and summing up, we obtain
∂
∂tGαβ W αβ = ∂
∂tGαβ XαY β = (−2Rci j + ∇i V j + ∇ j Vi
)X tan i Y tan j ,
where W = 12 (X ⊗ Y + Y ⊗ X) and X tan = P X , Y tan = PY . Integration with
respect to the measure dσ gives
∫
Γ
∂
∂tGαβ W αβ + 2Rci j X tan i Y tan j − (∇i V j + ∇ j Vi
)X tan i Y tan j dσ = 0.
The weak formulation (31) then follows from Lemma 5 with the tensor field W tan =12
(X tan ⊗ Y tan + Y tan ⊗ X tan
).
Now, let G(t), t ∈ [0, T ), be a solution to the flow (31) with G(0) = G0. Sincewe assume that G = G ◦ a, it suffices to show that the restriction G|Γ is unique. By
123

H. Fritz
choosing W = f (ν ⊗ Y + Y ⊗ ν) with f ∈ C∞(Γ, R) and Y ∈ C∞ (Γ, T R
n+1), it
follows that
∂
∂t(ν(a) · (G(a, t)Y (a))) = 0, ∀(a, t) ∈ Γ × (0, T ).
And therefore,
ν(a) · (G(a, t)Y (a)) = ν(a) · (G0(a)Y (a)) = λ(a)ν(a) · Y (a),
∀(a, t) ∈ Γ × [0, T ). According to this, we have
X · (G(a, t)Y ) = g(a, t) (P(a)X, P(a)Y ) + λ(a) (X · ν(a)) (Y · ν(a)) ,
∀X, Y ∈ TaRn+1,∀(a, t) ∈ Γ × [0, T ), where g(t) := G|T Γ ×T Γ for t ∈ [0, T ) is a
smooth family of metrics on Γ . From (31) and Lemma 5 it then follows that for allX, Y ∈ C∞ (Γ, T Γ ),
∫
Γ
∂
∂tgi j Xi Y j + 2Rci j Xi Y j − (∇i V j + ∇ j Vi
)Xi Y j dσ = 0.
Therefore, g(t) is a solution to the Ricci–DeTurck flow with g(0) = g0. Thus, theuniqueness of G follows from the uniqueness of the solution to the Ricci–DeTurckflow. If λ = 1 and g0 = g, we have
X · (G0(a)Y ) = X · (P(a)Y ) + (X · ν(a)) (Y · ν(a)) = X · Y,
and hence G0 = 1. �
Remark 3 In Lemma 2.1 of Shi’s paper [24], the following formulation of the flow(1) is proved for an arbitrary background metric g,
∂
∂tgi j = gkl∇k∇l gi j − gkl gip g pq R jkql − gkl g jp g pq Rikql + 1
2 gkl g pq ∇i gpk∇ j gql
+ gkl g pq(∇k g jp∇q gil − ∇k g jp∇l giq − ∇ j gpk∇l giq − ∇i gpk∇l g jq
),
where R jkql = g(
R(∂ j , ∂k
)∂l , ∂q
). For an embedded hypersurface Γ ⊂ R
n+1 with
induced metric g formula (31) is the weak analogue of Shi’s formula. Our formulationprovides, however, two advantages with regard to a finite element discretization. It onlycontains tangential gradients, and all geometric quantities are represented using theglobal coordinate frame of the ambient space. The latter point is important, because wecan then circumvent the problem of handling coordinate transformations in a discretesetting.
123

Numerical Ricci–DeTurck flow
Switching indices and rearranging terms in (31), we can rewrite the weak formu-lation of the Ricci–DeTurck flow in the following form
0 =∫
Γ
∂
∂tGκδW κδdσ +
∫
Γ
Pκι Pδ
α Gγβ Dγ Gκδ Dβ W tan ιαdσ
+ 2∫
Γ
GκδGβγ Rκιβγ W tan ιδdσ
+∫
Γ
Dγ Gκδ
(2DιGβα − DαGβι + DβGαι
)Pγ
ρ Gρβ Pκσ GσαW tan ιδdσ
−∫
Γ
Dγ Gκδ DιGβα
(Pβ
σ Gσγ P ιρGραW tan κδ + 1
2 Pδρ Gρβ Pα
σ Gσκ W tan ιγ)
dσ .
(33)
Here, we have also inserted the definition
Rκιβγ := Sβγ Sκ
ι − Sιγ Sκβ , κ, ι, β, γ = 1, . . . , n + 1. (34)
Actually, this is a special representation of the Riemannian curvature tensor R. To seethis, recall that according to the Gauss equation the components of the Riemanniancurvature tensor Rs
k ji with respect to a local coordinate system satisfies
Rsk ji =
(R(∂k, ∂ j )∂i
)s = (h ji hkm − hki h jm
)gms,
where hi j = ∂ϕ
∂θ i · S ∂ϕ
∂θ j Multiplying (34) by ∂ϕι
∂θk , ∂ϕβ
∂θ j , ∂ϕγ
∂θ i , ∂ϕκ
∂θm gms and summing overκ, ι, β, γ , we obtain
Rκιβγ
∂ϕι
∂θk
∂ϕβ
∂θ j
∂ϕγ
∂θ i
∂ϕκ
∂θmgms =
(Sβγ Sκ
ι − Sιγ Sκβ
) ∂ϕι
∂θk
∂ϕβ
∂θ j
∂ϕγ
∂θ i
∂ϕκ
∂θmgms
= (h ji hkm − hki h jm
)gms = Rs
k ji .
From the contracted Gauss equation in (17) we conclude that
Rκκβγ = H Sβγ − Sκγ Sκ
β = Rcβγ .
This result is the Cartesian reformulation of the identity Rci j = Rkki j , see for example
[17] for the definitions of the Ricci tensor and of the Riemannian curvature in localcoordinates. We use formulation (33) for the discretization of the Ricci–DeTurck flowand not (31), because it seems to be more clear how to discretize (33) such that itbecomes a system of linear equations for Gκδ .
4 Discretization
In order to discretize the evolution equation (33), we assume that Γ is approximatedby a piecewise linear hypersurface Γh ⊂ R
n+1, which is the union of n-dimensionalsimplices
123

H. Fritz
Γh :=⋃
T ∈Th
T ⊂ Γδ.
Here, Th denotes the set of the simplices, which are supposed to form an admissibletriangulation. This means that two adjacent simplices meet at a common k-dimensionalboundary simplex. Furthermore, we assume that the vertices of the triangulation sit onΓ and that for every point a ∈ Γ there is at most one point x ∈ Γh with a = a(x). Sincewe use linear simplices, the tangential gradient on Γh is actually a planar gradient.The only remnant of the embedding is that the nodal points ai , i = 1, . . . , N , whichare the vertices of the triangulation, are of dimension n + 1. The linear finite elementspace on Γh is
Sh :={χ ∈ C0 (Γh) | χ|T ∈ P1(T ) ∀T ∈ Th
},
where P1(T ) denotes the set of linear polynomials on T . The Lagrange basis functionsφi ∈ Sh , i = 1, . . . , N , are defined by φi (a j ) = δi j . The finite element space ofsymmetric two-tensors on Γh is denoted by
Symh :={χ ∈ S(n+1)×(n+1)
h | χ(a) is symmetric ∀a ∈ Γh
},
and the subspace of positive definite symmetric two-tensors is
Sym+h := {
χ ∈ Symh | χ(a) is positive definite ∀a ∈ Γh}.
The linear Lagrange interpolant on Γh is Ih : C0 (Γh) → Sh with (Ih f ) (x) :=∑Ni f (ai )φi (x).Here, we suggest two possibilities to discretize the smooth projection P on Γ .
Either we choose Ph ∈ Symh to be the solution of
∫
Γh
Ih
(Phαβ W αβ
h
)dσh =
∫
Γh
Phαβ W αβh dσh, ∀Wh ∈ Symh, (35)
where Ph := 1 − νh ⊗ νh is the projection on the tangent space of Γh and νh is thepiecewise constant unit normal on Γh , or we just define Ph := Ih P . For both choicesthe tangential projection of Wh ∈ Symh is defined by W tan
h (x) := ∑Ni=1 W tan
h (ai )φi (x)
with W tanhαβ(ai ) := P ι
hα(ai )Whικ (ai )Pκhβ(ai ). In the second case it is also reasonable
to use the smooth shape operator S on Γ in order to define the discrete Riemanniancurvature tensor
Rκhιβγ := Ih
(Sβγ Sκ
ι − Sιγ Sκβ
), κ, ι, β, γ = 1, . . . , n + 1. (36)
Alternatively, one can define a discrete shape operator Sh ∈ Symh on Γh . For thispurpose, one first defines a discrete mean curvature vector Hh ∈ Sn+1
h as the solutionof ∫
Γh
Hh · Whdσh =∫
Γh
(∇Γh idΓh
)αβ
(∇Γh Wh)αβ
dσh, ∀Wh ∈ Sn+1h ,
123

Numerical Ricci–DeTurck flow
where idΓh is the identity map on Γh . Following [15], the discrete Weingarten map
S′h =
(S′
h1, . . . , S′h(n+1)
), with S′
hα ∈ Sn+1h for α = 1, . . . , n + 1, is defined as the
solution of∫
Γh
S′hα · Whdσh =
∫
Γh
νhα
(Wh · Hh − ∇Γh · Wh
)dσh, ∀Wh ∈ Sn+1
h .
Finally, this solution is symmetrized, Shαβ := 12
(S′
hαβ + S′hβα
), leading to the discrete
shape operator Sh ∈ Symh . Then, definition (36) can optionally be replaced by
Rκhιβγ := Ih
(Shβγ Sκ
hι − Shιγ Sκhβ
), κ, ι, β, γ = 1, . . . , n + 1. (37)
In the following, we assume that the solution to the Ricci–DeTurck flow (31) existson the maximal time interval [0, T ). We divide this time interval into time steps tm =mτ , where τ > 0 is the constant time step size and m = 0, . . . , M with Mτ < T . Theapproximation to the metric G at the time level tm = mτ is denoted by Gm
h ∈ Sym+h .
The discrete inverse of Gmh is defined by Gmαβ
h (x) = ∑Ni=1 Gmαβ
h (ai )φi (x), where
Gmαβh (ai ) are the components of the inverse of Gm
h (ai ). Linearizing the flow in eachtime step by a semi-implicit time discretization, while respecting the symmetry of themetric, leads to the following numerical scheme.
Algorithm 1 (Discrete Ricci–DeTurck flow) For given initial G0h ∈ Sym+
h determinefor m = 0, . . . , M − 1 solutions Gm+1
h ∈ Sym+h such that
1
τ
∫
Γh
Gm+1hκδ W κδ
h dσh +∫
Γh
Ih
(Pκ
hι PδhαGmγβ
h
)Dγ Gm+1
hκδ Dβ W tan ιαh dσh
+∫
Γh
Gm+1hκδ Ih
(Gmβγ
h
(Rκ
hιβγ W tan ιδh + Rδ
hιβγ W tan ικh
))dσh
+∫
Γh
Dγ Gm+1hκδ
(DιG
mhβα − 1
2 DαGmhβι + 1
2 DβGmhαι
)
× Ih
(Gm tan γβ
h
(Gm tan κα
h W tan ιδh + Gm tan δα
h W tan ικh
))dσh
−∫
Γh
Dγ Gm+1hκδ DιG
mhβα
× Ih
(Gm tan γβ
h Gm tan ιαh W tan κδ
h + 12 Gm tan δβ
h Gm tan καh W tan ιγ
h
)dσh
= 1
τ
∫
Γh
GmhκδW κδ
h dσh, (38)
for all Wh ∈ Symh .
The invertibility of this system depends on the smooth solution g(t) of the Ricci–DeTurck flow (1). Because of the positivity of the first term of (38), the system isinvertible for sufficiently small time steps τ . It is easy to check that the system (38) is
123

H. Fritz
symmetric under an exchange of the indices κ ↔ δ. In order to secure the positivityof Gm+1
h , one has to stop the simulation when the eigenvalues of Gm+1h become non-
positive. Together with (35) and (37) the discrete Ricci–DeTurck flow (38) dependssolely on the triangulation Γh and on the initial data G0
h . However, because of thebetter approximation it might be more advantageous for numerical studies to use theinterpolants of the smooth quantities, which are (36) and Ph = Ih P . Linearizations ofthe Ricci–DeTurck flow by other semi-implicit time discretizations are possible, butnot in the scope of this article. The study of fully-implicit time discretizations remainsalso open.
5 Numerical results
5.1 Experiment 1: convergence test using an exact solution
We have tested the convergence of the discrete Ricci–DeTurck flow experimentallyfor the round unit sphere (Sn, g) in the two-dimensional case n = 2 and in the three-dimensional case n = 3. For this example, the solution to the Ricci flow and to theRicci–DeTurck flow is explicitly known. It is given by
g(t) = (1 − 2(n − 1)t)g,
which means that the sphere shrinks to a point in the time interval [0, T ) with T =1
2(n−1), see for example [2] and [27] for a discussion of special solutions. In order to
test our algorithm, we have to embed the round unit sphere (Sn, g) as a differentiablemanifold into R
n+1. A natural choice of such an embedding leads to the isometricallyembedded hypersurface
ΓSn :={
x ∈ Rn+1 | |x | = 1
}⊂ R
n+1. (39)
For the sake of simplicity, this hypersurface is also denoted by Sn instead of ΓSn in
the following. Since we choose λ = 1, the initial metric G0 in Theorem 1 is just givenby G0 = 1. Thus, the solution of the weak formulation (31) is
G(t) = (1 − 2(n − 1)t)P + ν ⊗ ν. (40)
for t < T with T = 12(n−1)
. We have implemented Algorithm 1 for the discrete Ricci–DeTurck flow within the Finite Element Toolbox ALBERTA, see [23]. A piecewiselinear approximation Γh of the sphere S
n is generated by successive refinements of anexplicitly constructed Lagrange interpolant of S
n . In each refinement step the elementsof the triangulation are bisected n-times in order to halve the maximal diameter h ofthe triangulation. During the bisection process the new vertices are projected onto S
n
by rescaling them to unit length. The outward unit normal on the unit sphere Sn is given
by ν(x) = x . For the shape operator we thus have S = P . Therefore, it makes senseto use the Lagrange interpolants νh = Ihν and Ph = Ih P , as well as definition (36),in Algorithm 1. Furthermore, the start metric is just given by G0
h = 1. The solution
123

Numerical Ricci–DeTurck flow
1e-06
1e-05
0.0001
0.001
0.01
0.1
1
0 0.1 0.2 0.3 0.4 0.5
L2-E
rrM
t
512 elements, h = 0.432’048 elements, h = 0.228’192 elements, h = 0.11
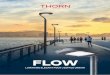
32’768 elements, h = 0.06
Fig. 1 Computation of the discrete Ricci–DeTurck flow (38) for the two-dimensional round unit sphere.The points show the L2-error (42) for four triangulations Th with maximal diameter h = 0.43 (red),h = 0.22 (green), h = 0.11 (blue) and h = 0.06 (magenta). The time step size was chosen as τ = 0.01 h2.Since the sphere collapses to a point at time T = 0.5, the solution (40) forms a singularity, at which theAlgorithm 1 obviously has to fail. At time t ≈ 0.25, we find an experimental order of convergence withrespect to the L2-error (42) of approximately 2, see Table 1 (color figure online)
Gm+1h of the linear system (38) is computed by the unpreconditioned BiCGSTAB
method, see [28]. We correct the solution in each vertex ai , i = 1, . . . , N , and in eachtime step as follows
Gm+1h (ai ) = Ph(ai )G
m+1h (ai )Ph(ai ) + νh(ai ) ⊗ νh(ai ). (41)
Otherwise, the unit normal νh(ai ) would cease to be an eigenvector of the discretemetric Gm+1
h (ai ), i = 1, . . . , N , after some time steps. We choose the time step sizeτ = 0.01 h2 for the two-dimensional sphere as well as for the three-dimensionalsphere, where h is the maximal diameter of the triangulation. In Figs. 1 and 2 theL2-error
L2-ErrM = maxm=0,...,M
‖G(mτ) ◦ a − Gmh ‖L2(Γh), (42)
is presented for all time steps M with Mτ < T and for different successive refinementsof the mesh. According to these numerical results, Algorithm 1 seems to converge forthe 2-sphere as well as for the 3-sphere, except for times t close to T = 1
2(n−1).
However, it is obvious that the algorithm has to fail near a singularity of the solution.What is important in this context is the fact that for a smaller grid size h one getscloser to the singularity. Thus, this effect should not prevent us to simulate the Ricci–DeTurck flow near finite time singularities, provided that the grid is sufficiently refined.For n = 2 and t = T
2 = 14 the experimental order of convergence
123

H. Fritz
1e-05
0.0001
0.001
0.01
0.1
1
0 0.05 0.1 0.15 0.2 0.25
L2-E
rrM
t
8’192 elements, h = 0.6665’536 elements, h = 0.34
524’288 elements, h = 0.17
Fig. 2 Computation of the discrete Ricci–DeTurck flow (38) for the three-dimensional round unit sphere.The points show the L2-error (42) for three triangulations Th with maximal diameter h = 0.66 (red),h = 0.34 (green) and h = 0.17 (blue). The time step size was chosen as τ = 0.01 h2. Since the spherecollapses to a point at time T = 0.25, the solution (40) forms a singularity, at which the Algorithm 1obviously has to fail. At time t ≈ 0.125, we find an experimental order of convergence with respect to theL2-error (42) of approximately 2, see Table 2 (color figure online)
Table 1 Numerical results forthe simulation of thetwo-dimensional shrinking
sphere(S
2, g)
at time
Mτ ≈ 0.25
Nsimplices h L2-ErrM L2-EOCM
512 0.43 4.63 e−02 –
2 048 0.22 1.16 e−02 2.00
8 192 0.11 2.92 e−03 1.99
32 768 0.06 7.32 e−04 2.00
Table 2 Numerical results forthe simulation of thethree-dimensional shrinking
sphere(S
3, g)
at time
Mτ ≈ 0.125
Nsimplices h L2-ErrM L2-EOCM
8 192 0.66 1.19 e−01 –
65 536 0.34 3.24 e−02 1.88
524 288 0.17 8.39 e−03 1.95
L2-EOCM := log2
(L2-ErrM
old
L2-ErrM
)
is presented in Table 1. For n = 3 and t = T2 = 1
8 the corresponding results can befound in Table 2.
123

Numerical Ricci–DeTurck flow
In both cases, we get an order of convergence we would expect for an implicit timediscretization of the (linear) heat flow in the planar case, see [9]. This test is, therefore,the first validation of our algorithm.
5.2 Experiment 2: shrinking to a round 2-sphere
Our next test problem is the two-dimensional sphere S2 ⊂ R
3 with the initial Rie-mannian metric
G0(x) = P(x)
⎛
⎝0.9 0 00 fα(x1) 00 0 fα(x1)
⎞
⎠ P(x) + ν(x) ⊗ ν(x), (43)
where x = (x1, x2, x3) ∈ S2 ⊂ R
3 and fα(x1) = αx21 + 1 − α. Based on some
heuristic arguments, which we have taken from [27], we expect that the Riemannianmanifold
(S
2, G0)
shrinks to a round sphere under the Ricci flow. Hence, we assumethat G(t) converges to r(t)2 P + ν ⊗ ν for some function r(t) > 0 with r(t) → 0 fort ↗ T . In order to verify this assumption numerically, the Ricci–DeTurck flow has tobe simulated for the initial metric G0. For this purpose, it suffices to change the initialdiscrete metric. Hence, the Algorithm 1 is now started with G0
h = IhG0. After solvingthe linear system (38), the eigenvalues and corrresponding eigenvectors of the solutionGm
h (ai ) are computed at all vertices ai of Γh in each time step. We rescale the eigenvec-tors such that their length is equal to the corresponding eigenvalue. Hence, these scaledeigenvectors give full information about the metric tensor Gm
h (ai ). In Figs. 3 and 4, theeigenvectors perpendicular to the eigenvector νh(ai ) = ν(ai ) in normal direction arepresented for different time steps tm = mτ . Since the lengths of these eigenvectorsare in proportion to the corresponding eigenvalues, shrinking eigenvectors indicatethat the Riemannian manifold shrinks in the corresponding direction. Conversely, anexpansion of the Riemannian manifold in a certain direction is indicated by a length-ening of the corresponding eigenvectors. From the results in Figs. 3 and 4, we cansee that the tangential eigenvectors shrink and that they tend to become equally long.This means that, at least qualitatively, Ph(ai )Gm
h (ai )Ph(ai ) tends to become equal tor(t)2 Ph(ai ) for some shrinking radius r(t). We can interpret this behavior as a Rie-mannian manifold that gets rounder while shrinking at the same time. This is indeedwhat we would expect from theoretical considerations, see for example [27].
5.3 Experiment 3: simulation of the formation of neck pinch
In order to simulate the formation of a neck pinch singularity, see [1] and [25], theRicci–DeTurck flow (31) is considered for the initial metric G0 = 1 on the hypersur-face
Γφα :={
x ∈ R4 | φα(x) = 0
}, with (44)
φα :=(αx2
1 + 1 − α)2 (
x21 − 1
)+ x2
2 + x23 + x2
4 .
123

H. Fritz
Fig. 3 Simulation of the Ricci–DeTurck flow on the two-dimensional sphere S2. The initial metric G0
is given by (43) for α = 0.8. The white lines show the scaled tangential eigenvectors of G0h(ai ) for all
vertices ai at time t = 0. The length of an eigenvector is in proportion to the corresponding eigenvalue. Thetriangulation Th of Γh has 2,048 elements and the maximal diameter of the triangulation is h = 0.22. Thetime step size was chosen as t = 0.1 h2 ≈ 0.0048. The viewing direction is perpendicular to the x1-axis,which is oriented from left to right. The image is arranged such that the equator is parallel to the verticaldirection of the image plane. At the equator the eigenvectors parallel to the x1-axis are significantly longerthan the eigenvectors parallel to the vertical direction of the image plane. Toward the poles, the eigenvectorstend to become equally long. This variation indicates that the manifold (S2, G0) has a neck at the equator.This means that for the cross-sections S
2 ∩ {x ∈ R3 | x1 = c}, with c ∈ (−1, 1), the radii with respect to
the metric G0 have a local minimum at the equator c = 0. The image was generated in ParaView
Fig. 4 Simulation of the Ricci–DeTurck flow on the two-dimensional sphere S2. The initial metric is shown
in Fig. 3. The white lines show the scaled tangential eigenvectors of Gmh (ai ), m = 30, at time t ≈ 0.14.
Compared with the situation in Fig. 3, the eigenvectors, especially those parallel to the horizontal direction,have shrunk, and they apparently tend to become equally long. The simulation, therefore, indicates that the
sphere(S
2, G(t))
becomes rounder under the flow, while it also shrinks at the same time. This behavior is
consistent with theoretical expectations
123

Numerical Ricci–DeTurck flow
Fig. 5 Simulation of the Ricci–DeTurck flow on the three-dimensional topological sphere Γφα ⊂ R4 with
α = 0.8, see (44). The initial metric is G0 = 1. The image shows the orthographic projection of Γφα
onto the hyperplane {x ∈ R4 | x3 = 0}. The viewing direction in the above figure is perpendicular to the
x1-axis, which is oriented from left to right. The equator is parallel to the vertical direction of the imageplane. The hypersurface Γφα has a neck at the equator. The white lines show the tangential eigenvectors ofthe discrete metric Gm
h (ai ), m = 1, for all vertices ai of Γh . The length of an eigenvector is in proportion tothe corresponding eigenvalue. The triangulation Th of Γh has 65,536 elements and the maximal diameterof the triangulation is h = 0.28. The time step size was chosen as t = 0.01 h2 ≈ 0.0008. Since we havestarted with the discrete metric G0
h = 1, the scaled eigenvectors still have approximately the same lengthafter the first time step
For α = 0 this hypersurface is the embedded unit 3-sphere S3 ⊂ R
4. For 0 <
α < 1 it is a topological sphere that has a neck at the equator. Here, we chooseα = 0.8. A piecewise linear approximation Γh of Γφα is generated by first refining apolyhedral approximation of the unit 3-sphere S
3, followed by applying the projection(x1, x2, x3, x4) �→ (x1, fα(x1)x2, fα(x1)x3, fα(x1)x4) with fα(x1) = αx2
1 + 1 − α
to the vertices of Γh . The unit normal ν is computed by ν(ai ) = Dφα
|Dφα | (ai ) and the
shape operator by S(ai ) = ∇ΓDφα
|Dφα | (ai ). For this simulation, we use the interpolated
quantities νh = Ihν, Ph = Ih P and the interpolated Riemannian curvature tensor(36). The start metric is G0
h = 1. Again, the solution Gm+1h of (38) is corrected by
formula (41) in each time step. In Figs. 5 and 6, the approximation Γh of Γφα ispresented as orthographic projection onto the hyperplane {x ∈ R
4 | x3 = 0}. Thetangential eigenvectors of Gm
h (ai ) are shown in each vertex ai . The eigenvectors areagain scaled such that their lengths are in proportion to the corresponding eigenvalues.Hence, these eigenvectors show the time evolution of the metric Gm
h . In particular, theformation of a neck pinch becomes manifest in a special change of the length of theeigenvectors at the neck of Γφα , see Fig. 6. From the numerical results, we can seethat the eigenvectors that are parallel to the horizontal direction of the image plane arestretched, while the eigenvectors that are perpendicular to this direction tend to shrink.This result can be interpreted as a neck that is stretched in the horizontal direction,
123

H. Fritz
Fig. 6 Simulation of the Ricci–DeTurck flow on the three-dimensional topological sphere Γφα ⊂ R4,
α = 0.8 for the initial metric G0 = 1, see also Fig. 5. The image shows an enlarged section of theorthographic projection of Γφα . The white lines show the scaled tangential eigenvectors of Gm
h (ai ), m = 24,for all vertices ai near the neck of the hypersurface at time t ≈ 0.019. The eigenvectors at the equator thatare parallel to the vertical direction of the image plane have shrunk dramatically, whereas the eigenvectorsparallel to the horizontal direction are stretched. This means that the metric contracts the cross-section inthe vertical direction. At the same time the neck is stretched in the horizontal direction with respect to Gm
h .This behavior, thus, indicates the formation of a neck pinch singularity
while the cross-section perpendicular to this direction is contracted. We think thatthis behavior indeed indicates the formation of a neck pinch singularity. However, in afuture work, the Ricci curvature of Gm
h should be computed in parallel in order to verifynumerically that we really have |R|g(t) → ∞ for t → T in a neighborhood of theequator. For this purpose, it would suffice to compute the Ricci curvature, because forthree-dimensional manifolds the Riemannian curvature tensor R is already determinedby the Ricci curvature. For the computation of the Ricci curvature it would be possibleto use the numerical schemes developed in [10].
Acknowledgments This work was supported by the German Research Foundation DFG via the SFB/TR71 “Geometric Partial Differential Equations”. We thank Gerhard Dziuk for helpful discussions.
References
1. Angenent, S., Knopf, D.: An example of neckpinching for Ricci flow on Sn+1. Math. Res. Lett. 11,
493–518 (2004)2. Chow, B., Knopf, D.: The Ricci Flow: An introduction. In: Mathematical Surveys and Monographs,
vol. 110. AMS, Providence (2004)3. Chow, B., Lu, P., Ni, L.: Hamilton’s Ricci Flow. In: Graduate Studies in Mathematics. AMS Science
Press, Providence (2006)4. Deckelnick, K., Dziuk, G., Elliott, C.M.: Computation of geometric partial differential equations and
mean curvature flow. Acta Numerica 14, 139–232 (2005)5. Demlow, A.: Higher-order finite element methods and pointwise error estimates for elliptic problems
on surfaces. SIAM J. Numer. Anal. 47, 805–827 (2009)
123

Numerical Ricci–DeTurck flow
6. DeTurck, D.M.: Deforming metrics in the direction of their Ricci tensor. In: Cao, H.D., Chow, B.,Chu, S.C., Yau, S.T. (eds.) Collected papers on Ricci flow, Series in Geometry and Topology, vol. 37.International Press, Somerville (2003)
7. Dziuk, G.: Finite elements for the Beltrami operator on arbitrary surfaces. In: Hildebrandt, S., Leis,R. (eds.) Partial Differential Equations and Calculus of Variations. Lecture Notes in Mathematics,vol. 1357, pp. 142–155. Springer, Berlin (1988)
8. Dziuk, G.: Computational parametric Willmore flow. Numer. Math. 111, 55–80 (2008)9. Dziuk, G.: Theorie und Numerik Partieller Differentialgleichungen. De Gruyter, Studium (2010)
10. Fritz, H.: Isoparametric finite element approximation of Ricci curvature. IMA J Numer Anal (2013).doi:10.1093/imanum/drs037
11. Garfinkle, D., Isenberg, J.: Numerical studies of the behavior of Ricci flow. In: Geometric EvolutionEquations, Contemporary Mathematics, vol. 367. AMS, Providence (2005)
12. Garfinkle, D., Isenberg, J.: The modeling of degenerate neck pinch singularities in Ricci flow by Bryantsolitons. J. Math. Phys. 49, 073505 (2008)
13. Hamilton, R.S.: Three-manifolds with positive Ricci curvature. J. Differ. Geom. 17(2), 255–306 (1982)14. Hamilton, R.S.: The formation of singularities in the Ricci flow. In: Surveys in Differential Geometry,
vol. II. International Press, Cambridge (1995)15. Heine, C.J.: Isoparametric finite element approximation of curvature on hypersurfaces. Preprint,
Fakultät für Mathematik und Physik, Universität Freiburg Nr. 26 (2004)16. Jin, M., Kim, J., Luo, F., Gu, X.: Discrete surface Ricci flow. IEEE Trans. Vis Comput Graph. 14(5),
1030–1043 (2008)17. Lee, J.M.: Riemannian manifolds: an introduction to curvature. In: Graduate Texts in Mathematics.
Springer, Berlin (1997)18. Lima, E.L.: The Jordan-Brouwer separation theorem for smooth hypersurfaces. Am. Math. Mon. 95(1),
39–42 (1988)19. Perelman, G.: Ricci flow with surgery on three-manifolds. arXiv:math.DG/030310920. Perelman, G.: The entropy formula for the Ricci flow and its geometric applications.
arXiv:math.DG/021115921. Perelman, G.: Finite extinction time for solutions to the Ricci flow on certain three-manifolds (2003).
arXiv:math.DG/030724522. Rubinstein, J.H., Sinclair, R.: Visualizing Ricci flow of manifolds of revolution. Exp. Math. 14(3),
285–298 (2005)23. Schmidt, A., Siebert, K.G.: Design of adaptive finite element software. In: Lecture Notes in Compu-
tational Science and Engineering. vol. 42. Springer, Berlin (2005)24. Shi, W.X.: Deforming the metric on complete Riemannian manifolds. J. Differ. Geom. 30, 223–301
(1989)25. Simon, M.: A class of Riemannian manifolds that pinch when evolved by Ricci flow. Manuscr. Math.
101, 89–114 (2000)26. Taft, J.C.: Intrinsic geometric flows on manifolds of revolution. Ph.D. thesis (2010)27. Topping, P.: Lectures on the Ricci flow. Lecture Note Series 325. London Mathematical Society (2006)28. Vorst, H.A.v.d.: Bi-CGSTAB: A fast and smoothly converging variant of Bi-CG for the solution of
non-symmetric linear systems. SIAM J. Sci. Stat. Comput. 13, 631–644 (1992)29. Yano, K.: On harmonic and killing vector fields. Ann. Math. Second Ser. 55(1), 38–45 (1952)
123







![KAWA lecture notes on the Kähler Ricci flow...Kähler–Ricci flow on noncompact Kähler manifolds [7,59], or the Chern Ricciflow[27,79,78,80](ageneralizationoftheKähler–Ricciflowtopos-](https://img.pdfslide.fr/doc/110x75/5f1f412c9e117570bd26b000/kawa-lecture-notes-on-the-khler-ricci-flow-khleraricci-iow-on-noncompact.jpg)