Embed Size (px)
Citation preview
Institut français
des sciences et technologies
des transports, de l’aménagement
et des réseaux
ORSI I2V (2010-2014)
Impact des Informations Visuelles
sur les comportements de conduite
Eric Dumont (Ifsttar / CoSys / LEPSiS)
Pierre Charbonnier (Cerema / Dter-Est / ERA 27)
Séminaire de clôture, Le Grand Quevilly, 5-6 novembre 2014
Enjeux et objectifs
• Enjeux : sécurité routière durable
– Les accidents impliquent souvent un problème
de prise ou de traitement de l’information,
conduisant à un comportement inadapté.
– La route autrement pour une conduite apaisée
• La maîtrise des vitesses est un enjeu fort de la politique
de sécurité routière.
• Si les contrôles exercés sur l’usager portent leurs fruits,
l’objet routier doit également y contribuer.
• Objectifs : améliorer la lisibilité* de la route
– Identifier, mesurer et restituer les informations visuelles qui déterminent le
comportement des usagers de la route dans différentes situations de conduite
– Proposer des solutions d’aménagement de la route
pour une conduite apaisée
© o
uestfra
nce.fr
(*) lisibilité = capacité à induire un comportement sûr 2 / 24
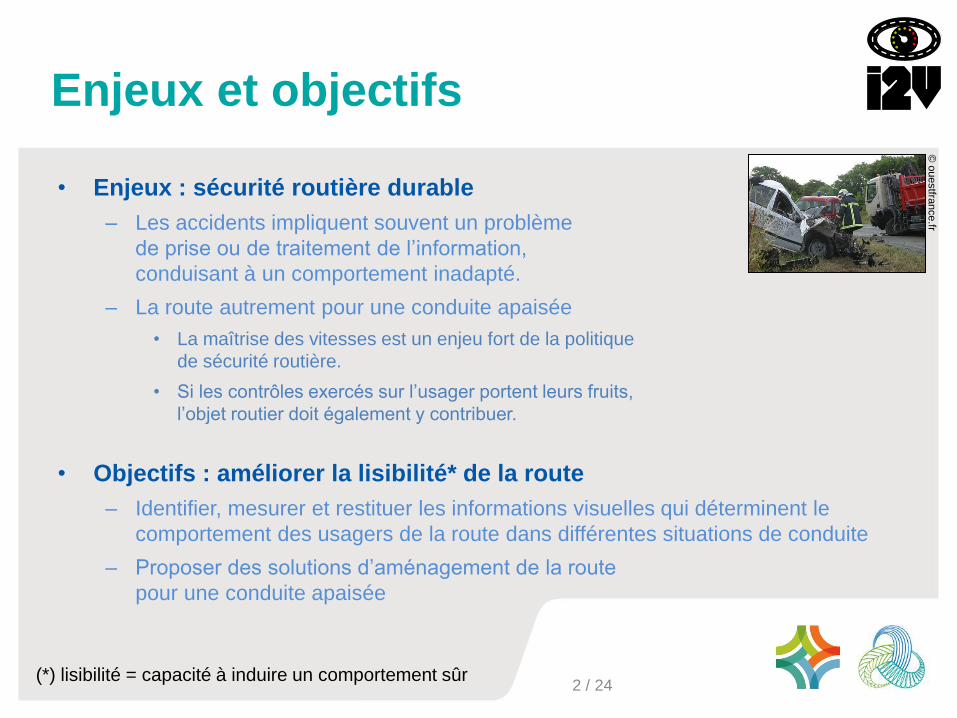
Démarche
© tra
nsitio
nsm
ft.org
Etudier les liens entre
la visibilité / lisibilité de la route
et le comportement des conducteurs
Développer les outils d’observation
de la stratégie visuelle et du
comportement des conducteurs
Développer les outils
de caractérisation des descripteurs
visuels de la scène routière
OR Risques Routiers
OR Visibilité et Sécurité
Routière
3 / 24
Sciences humaines
Sciences pour l’ingénieur
Plan de la présentation
4 / 24
I2V (2010-2014)
Enjeux et objectifs
Démarche
– Perception visuelle de la route
– Résultats
• Outils pour caractériser la route
• Outils pour observer le comportement de conduite
• Études de l’impact des informations visuelles
– Productions
– Perspectives
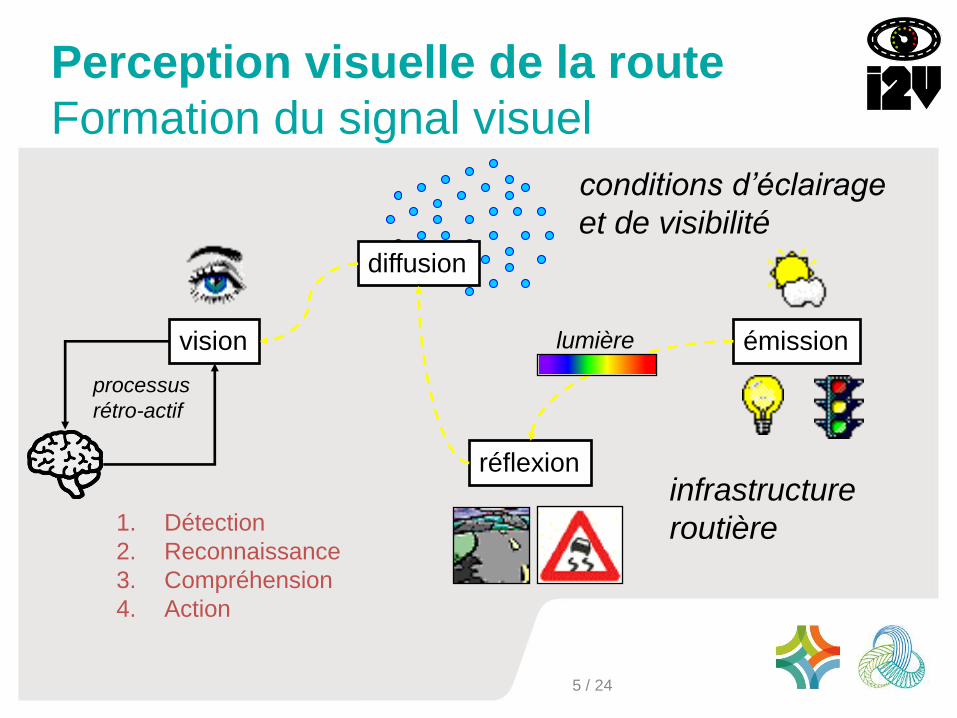
Perception visuelle de la route
Formation du signal visuel
réflexion
vision
diffusion
émission
infrastructure
routière
conditions d’éclairage
et de visibilité
1. Détection
2. Reconnaissance
3. Compréhension
4. Action
lumière
processus
rétro-actif
5 / 24
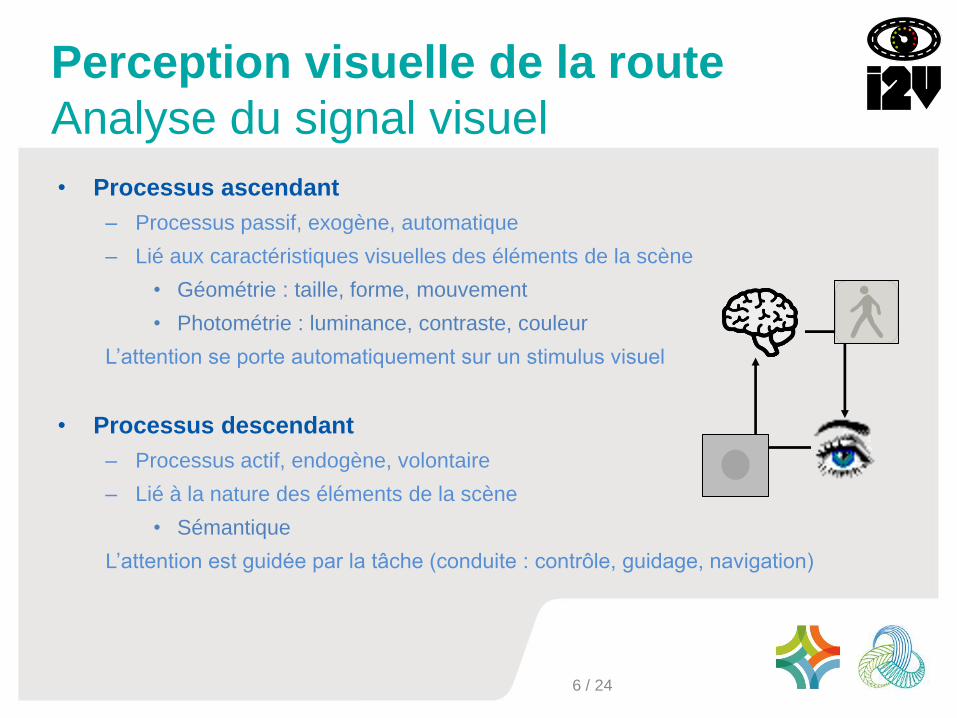
Perception visuelle de la route
Analyse du signal visuel
• Processus ascendant
– Processus passif, exogène, automatique
– Lié aux caractéristiques visuelles des éléments de la scène
• Géométrie : taille, forme, mouvement
• Photométrie : luminance, contraste, couleur
L’attention se porte automatiquement sur un stimulus visuel
• Processus descendant
– Processus actif, endogène, volontaire
– Lié à la nature des éléments de la scène
• Sémantique
L’attention est guidée par la tâche (conduite : contrôle, guidage, navigation)
6 / 24
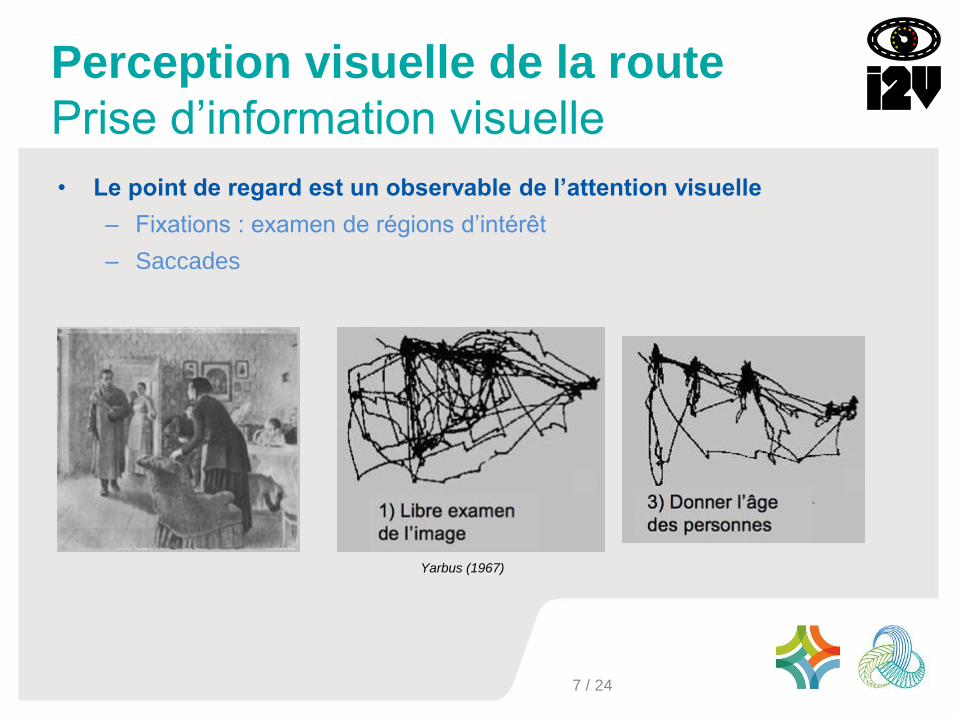
• Le point de regard est un observable de l’attention visuelle
– Fixations : examen de régions d’intérêt
– Saccades
Perception visuelle de la route
Prise d’information visuelle
Yarbus (1967)
7 / 24
Plan de la présentation
I2V (2010-2014)
Enjeux et objectifs
Démarche
Perception visuelle de la route
– Résultats
• Outils pour caractériser la route
• Outils pour observer le comportement de conduite
• Études de l’impact des informations visuelles
– Productions
– Perspectives
8 / 24
Outils pour caractériser la route
Caractéristiques photométriques
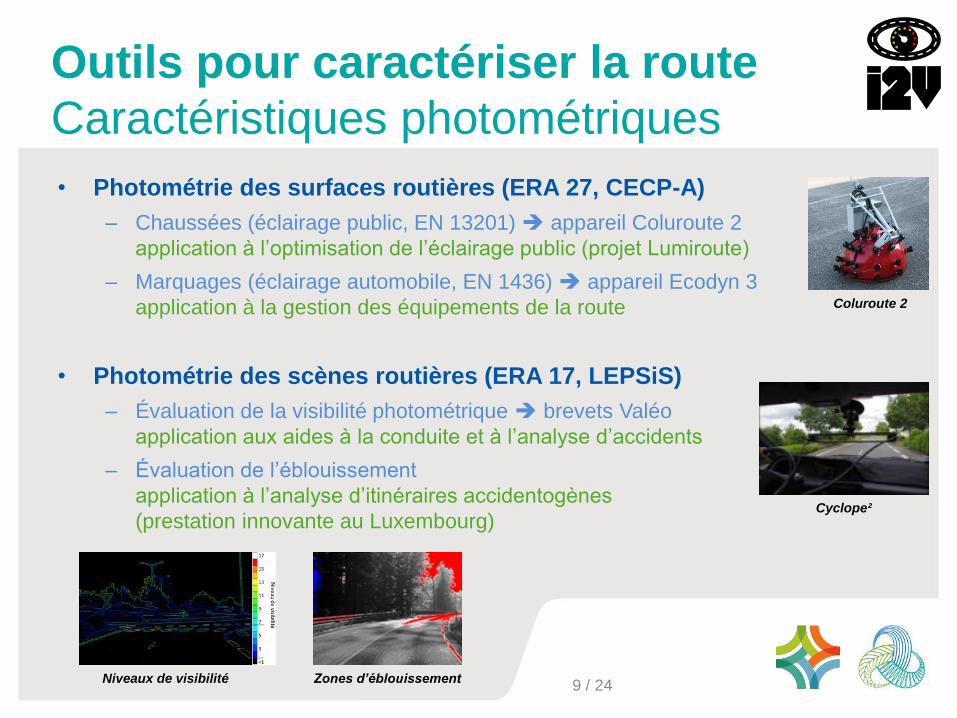
• Photométrie des surfaces routières (ERA 27, CECP-A)
– Chaussées (éclairage public, EN 13201) appareil Coluroute 2
application à l’optimisation de l’éclairage public (projet Lumiroute)
– Marquages (éclairage automobile, EN 1436) appareil Ecodyn 3
application à la gestion des équipements de la route
• Photométrie des scènes routières (ERA 17, LEPSiS)
– Évaluation de la visibilité photométrique brevets Valéo
application aux aides à la conduite et à l’analyse d’accidents
– Évaluation de l’éblouissement
application à l’analyse d’itinéraires accidentogènes
(prestation innovante au Luxembourg)
Coluroute 2
Cyclope²
Niveaux de visibilité Zones d’éblouissement 9 / 24
Outils pour caractériser la route
Caractéristiques sémantiques
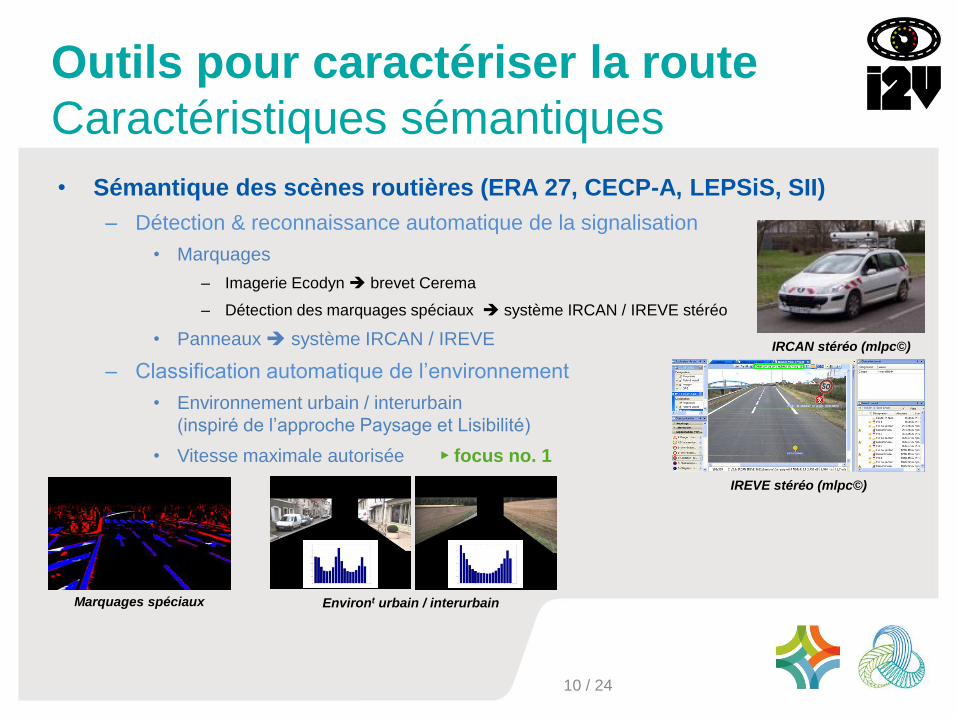
• Sémantique des scènes routières (ERA 27, CECP-A, LEPSiS, SII)
– Détection & reconnaissance automatique de la signalisation
• Marquages
– Imagerie Ecodyn brevet Cerema
– Détection des marquages spéciaux système IRCAN / IREVE stéréo
• Panneaux système IRCAN / IREVE
– Classification automatique de l’environnement
• Environnement urbain / interurbain
(inspiré de l’approche Paysage et Lisibilité)
• Vitesse maximale autorisée ► focus no. 1
IRCAN stéréo (mlpc©)
IREVE stéréo (mlpc©)
Marquages spéciaux Environt urbain / interurbain
10 / 24
Plan de la présentation
I2V (2010-2014)
Enjeux et objectifs
Démarche
Perception visuelle de la route
– Résultats
Outils pour caractériser la route
• Outils pour observer le comportement de
conduite
• Études de l’impact des informations visuelles
– Productions
– Perspectives 11 / 24
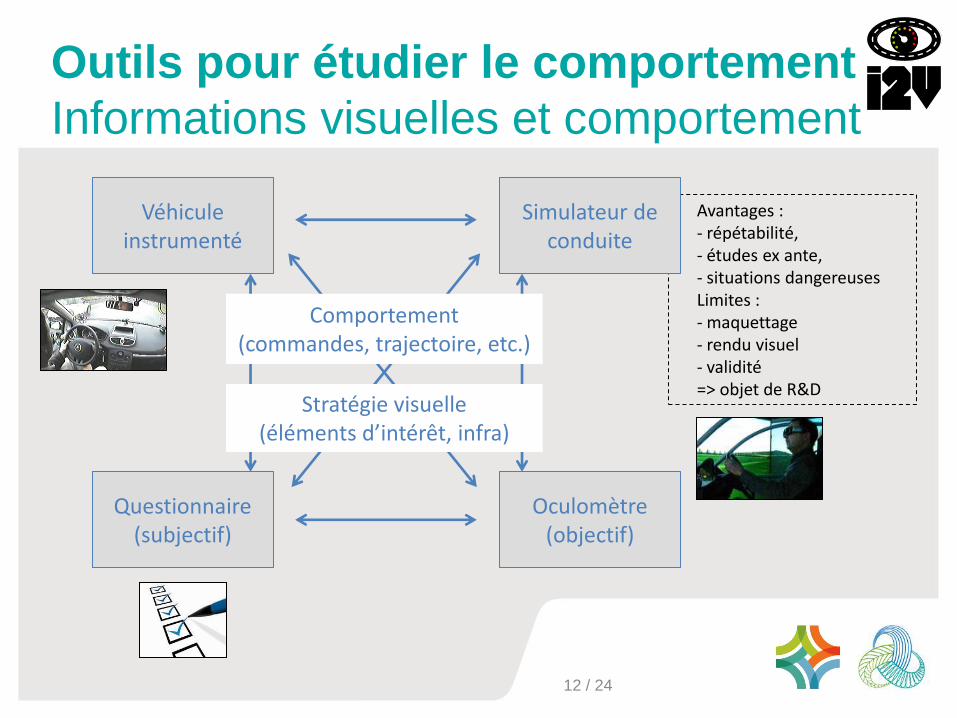
Avantages : - répétabilité, - études ex ante, - situations dangereuses Limites : - maquettage - rendu visuel - validité => objet de R&D
Outils pour étudier le comportement
Informations visuelles et comportement
Questionnaire (subjectif)
Oculomètre (objectif)
Véhicule instrumenté
Simulateur de conduite
Comportement (commandes, trajectoire, etc.)
Stratégie visuelle (éléments d’intérêt, infra)
12 / 24

Outils pour étudier le comportement
Simulateurs de conduite
• Rendu visuel à haute dynamique lumineuse (LEPSiS)
Application à l’évaluation de dispositifs d’éclairage et de signalisation
• Déploiement d’un simulateur Ifsttar au Cerema
(ERA 33, ERA 34, LEPSiS)
– Installation, formation
– Réalisation de maquettes
• Aménagements : balisage, route apaisée
• Itinéraire : RD 786 (étudié dans SARI et DIVAS) Simulateur de conduite
de Saint-Brieuc
INROADS (FP7) LUCOS (PREDIT)
13 / 24
Outils pour étudier le comportement
Simulateurs de conduite
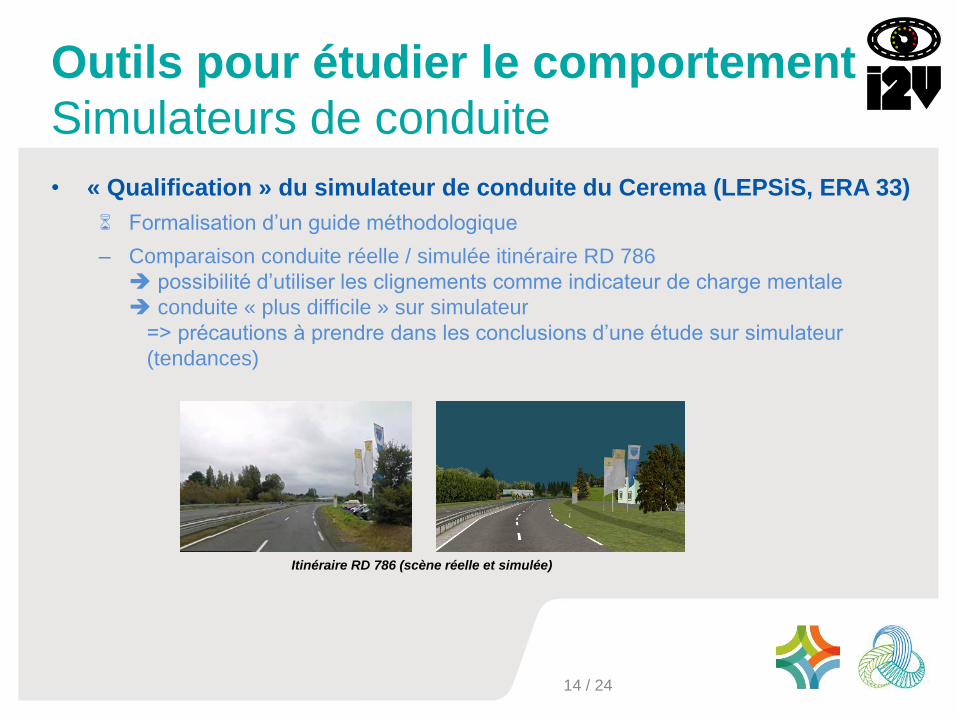
• « Qualification » du simulateur de conduite du Cerema (LEPSiS, ERA 33)
Formalisation d’un guide méthodologique
– Comparaison conduite réelle / simulée itinéraire RD 786
possibilité d’utiliser les clignements comme indicateur de charge mentale
conduite « plus difficile » sur simulateur
=> précautions à prendre dans les conclusions d’une étude sur simulateur
(tendances)
Itinéraire RD 786 (scène réelle et simulée)
14 / 24
Outils pour étudier le comportement
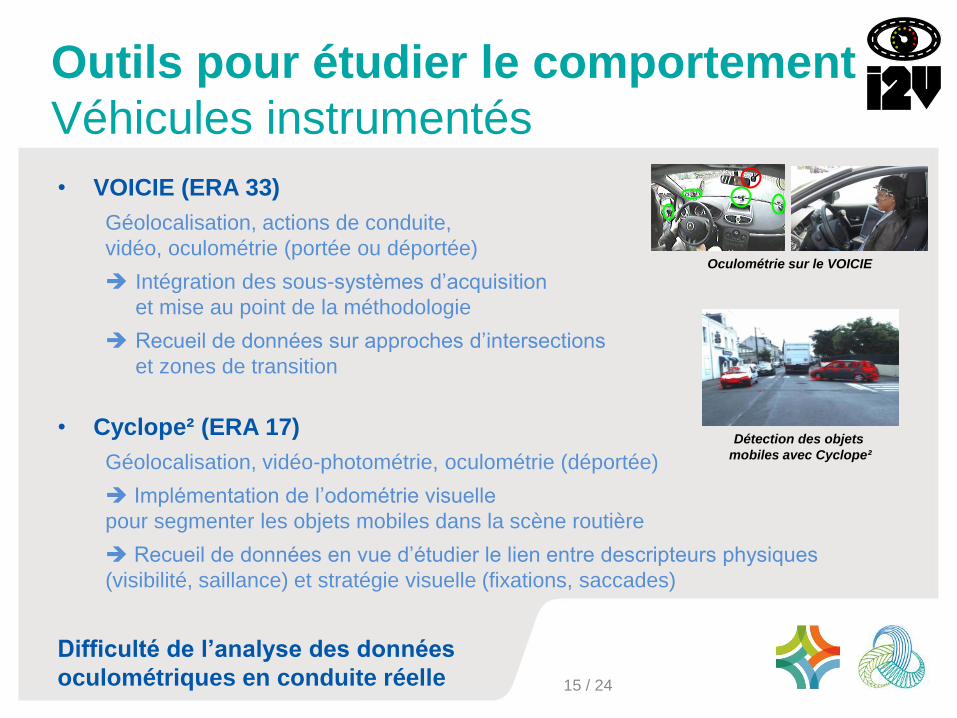
Véhicules instrumentés
• VOICIE (ERA 33)
Géolocalisation, actions de conduite,
vidéo, oculométrie (portée ou déportée)
Intégration des sous-systèmes d’acquisition
et mise au point de la méthodologie
Recueil de données sur approches d’intersections
et zones de transition
• Cyclope² (ERA 17)
Géolocalisation, vidéo-photométrie, oculométrie (déportée)
Implémentation de l’odométrie visuelle
pour segmenter les objets mobiles dans la scène routière
Recueil de données en vue d’étudier le lien entre descripteurs physiques
(visibilité, saillance) et stratégie visuelle (fixations, saccades)
Difficulté de l’analyse des données
oculométriques en conduite réelle
Oculométrie sur le VOICIE
Détection des objets
mobiles avec Cyclope²
15 / 24
Plan de la présentation
I2V (2010-2014)
Enjeux et objectifs
Démarche
Perception visuelle de la route
– Résultats
Outils pour caractériser la route
Outils pour observer le comportement de conduite
• Études de l’impact des informations visuelles
– Productions
– Perspectives
16 / 24
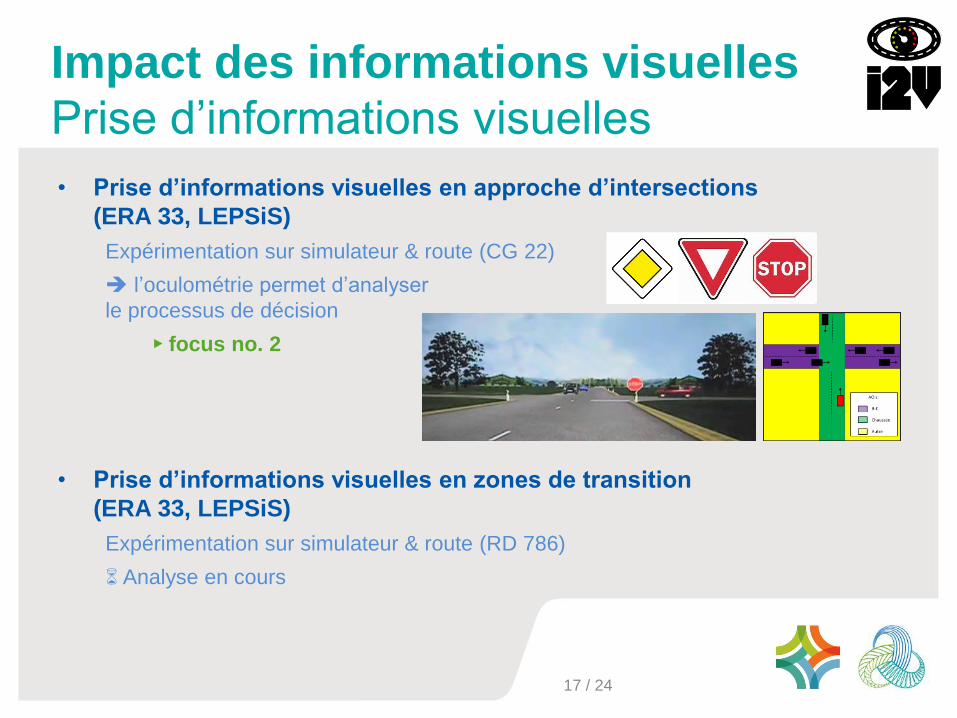
• Prise d’informations visuelles en approche d’intersections
(ERA 33, LEPSiS)
Expérimentation sur simulateur & route (CG 22)
l’oculométrie permet d’analyser
le processus de décision
► focus no. 2
• Prise d’informations visuelles en zones de transition
(ERA 33, LEPSiS)
Expérimentation sur simulateur & route (RD 786)
Analyse en cours
Impact des informations visuelles
Prise d’informations visuelles
17 / 24
Impact des informations visuelles
Limites de vitesse perçues
• Lien entre le type de route et la limite de vitesse (ERA 34, ERA 33)
– Expérimentation avec questionnaire sur photos
– 3 types de route : autoroute, autres routes à chaussée séparée, bidirectionnelle
– 3 questions
1. Quelle limite de vitesse : 50, 70, 90, 110, 130, nsp ?
2. Quel élément déterminant ?
3. Quelle route ?
Analyse des réponses à la 1ère question
18 / 24
Impact des informations visuelles
Limites de vitesse perçues
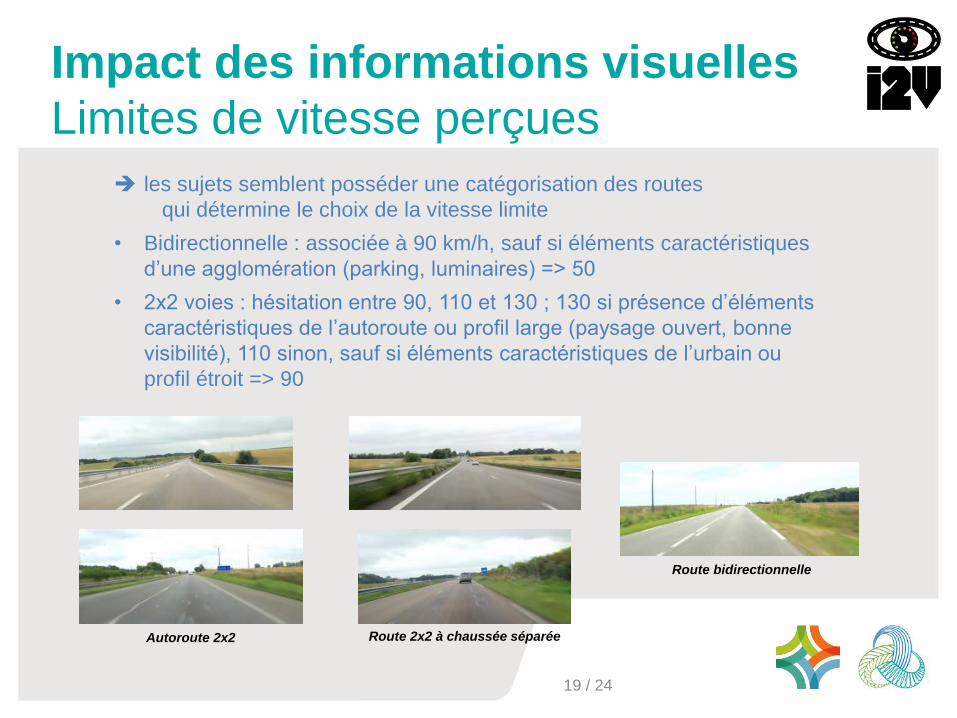
les sujets semblent posséder une catégorisation des routes
qui détermine le choix de la vitesse limite
• Bidirectionnelle : associée à 90 km/h, sauf si éléments caractéristiques
d’une agglomération (parking, luminaires) => 50
• 2x2 voies : hésitation entre 90, 110 et 130 ; 130 si présence d’éléments
caractéristiques de l’autoroute ou profil large (paysage ouvert, bonne
visibilité), 110 sinon, sauf si éléments caractéristiques de l’urbain ou
profil étroit => 90
Autoroute 2x2 Route 2x2 à chaussée séparée
Route bidirectionnelle
19 / 24
Impact des informations visuelles
Diagnostic d’accidents
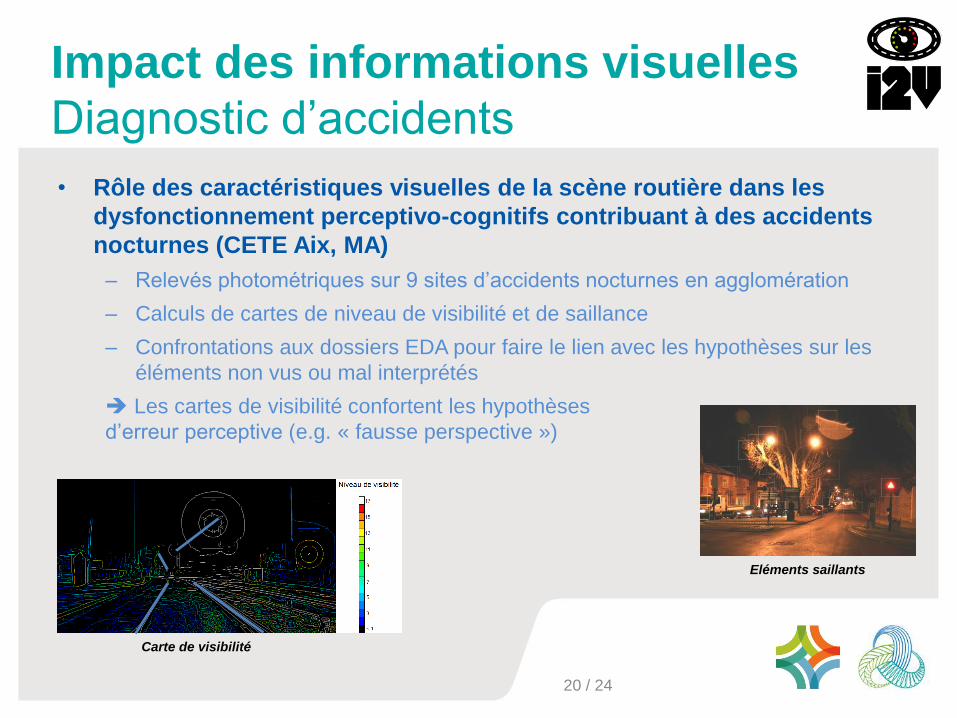
• Rôle des caractéristiques visuelles de la scène routière dans les
dysfonctionnement perceptivo-cognitifs contribuant à des accidents
nocturnes (CETE Aix, MA)
– Relevés photométriques sur 9 sites d’accidents nocturnes en agglomération
– Calculs de cartes de niveau de visibilité et de saillance
– Confrontations aux dossiers EDA pour faire le lien avec les hypothèses sur les
éléments non vus ou mal interprétés
Les cartes de visibilité confortent les hypothèses
d’erreur perceptive (e.g. « fausse perspective »)
Eléments saillants
Carte de visibilité
20 / 24
Plan de la présentation
I2V (2010-2014)
Enjeux et objectifs
Démarche
Perception visuelle de la route
Résultats
• Outils pour caractériser la route
• Outils pour observer le comportement de conduite
• Études de l’impact des informations visuelles
– Productions
– Perspectives
21 / 24
Productions
• Outils, prestations innovantes
– Jeux de données
– Algorithmes d’analyse de scènes routières (focus no. 1)
– Simulateur de conduite pour étudier la lisibilité de la route
• Connaissances
– Problème de lisibilité des routes à chaussées séparées
– Processus décisionnel en approche d’intersection (focus no. 2)
• Publications
– 13 articles dans des revues internationales à comité de lecture
– 33 articles dans des actes de conférences internationales
– 3 brevets industrialisés
22 / 24
Perspectives
• Exploitation des données recueillies
– Analyse des vitesses pratiquées (ORSI Vitesse en préparation)
• Exploitation des outils développés
– Évaluation de routes existantes et de projets d’aménagement (ORSI OLAS en
préparation)
– Prise en compte des conditions : trafic, météo (ORSI COMET en cours)
• Développement des outils (partenariats industriels ?)
– Sélection automatique de régions d’intérêt de la scène routière
pour l’analyse oculométrique
– Récupération/génération de maquettes 3D d’aménagements routiers
– Modélisation du comportement
pour des simulations plus réalistes
23 / 24

Merci pour votre attention
Ifsttar
14-20 Bld. Newton
Cité Descartes
Champs sur Marne
77447 Marne-la-Vallée Cedex 2
France Tél. +33 (0)1 81 66 80 00
www.ifsttar.fr
Cerema
Cité des mobilités
25, avenue François Mitterrand
CS 92 803
69674 Bron Cedex
France Tél : +33 (0)4 72 14 30 30
www.cerema.fr
24 / 24