Embed Size (px)
Citation preview
Outils d’Aide à la Décision
Christophe Duhamel & Philippe Lacomme
ZZ2 F2/F3 - 2014
Complexité algorithmique
Conception d'algorithmes
Problèmes combinatoires
Problèmes d'ordonnancement
Problèmes de transport
Plan du cours
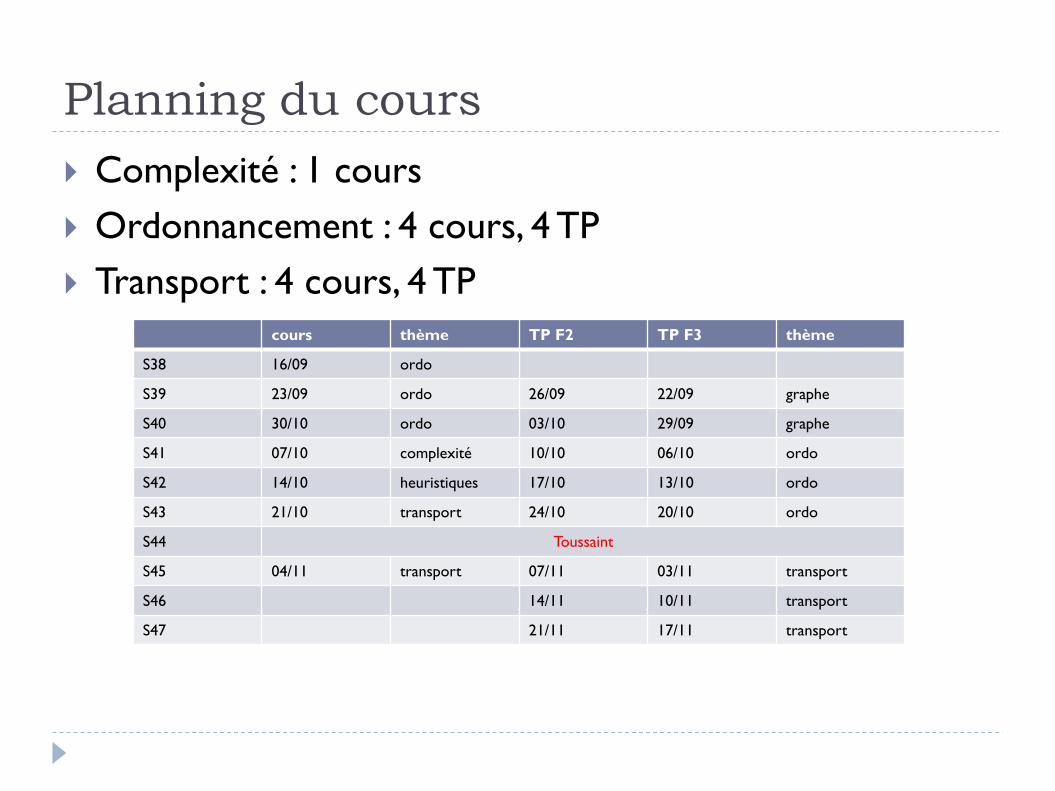
cours thème TP F2 TP F3 thème
S38 16/09 ordo
S39 23/09 ordo 26/09 22/09 graphe
S40 30/10 ordo 03/10 29/09 graphe
S41 07/10 complexité 10/10 06/10 ordo
S42 14/10 heuristiques 17/10 13/10 ordo
S43 21/10 transport 24/10 20/10 ordo
S44 Toussaint
S45 04/11 transport 07/11 03/11 transport
S46 14/11 10/11 transport
S47 21/11 17/11 transport
Complexité : 1 cours
Ordonnancement : 4 cours, 4 TP
Transport : 4 cours, 4 TP
Planning du cours
1. Complexité algorithmique
Motivations
Définitions
Principales classes de complexité
Calcul de complexité
Concevoir un algorithme, c'est bien
Connaître les limites de l'algorithme, c'est mieux !
Limites
Préconditions
Postconditions
Temps de calcul
Taille mémoire
Communications
1.1 Motivations
Efficacité d'un algorithme
Les performances sont importantes lorsque l'algorithme
constitue un goulot d'étranglement du système
Volumétrie importante (grande taille de données)
Nombre élevé d'appels (algorithme utilisé souvent)
Contraintes sur le temps de réponse
Contextes typiques
Systèmes embarqués, temps-réel
Logiciels de calcul
Fouille de données
1.1 Motivations
1.1 Motivations
Comparaison d'algorithmes
Plusieurs algorithmes pour résoudre le même problème
Lequel est le meilleur ?
Selon quel critère ?
Dans quel contexte ?
Sur quel type de données ?
1.1 Motivations
Analyse a priori
Formulation mathématique pour le critère
+ meilleure compréhension de l'algorithme
- obtention parfois complexe
Analyse a postériori
Outils de profilage, de tests (unitaires, couverture...)
+ utilisation simple
- algorithme = boîte noire, délai d'obtention
Ici, analyse a priori
1.1 Motivations
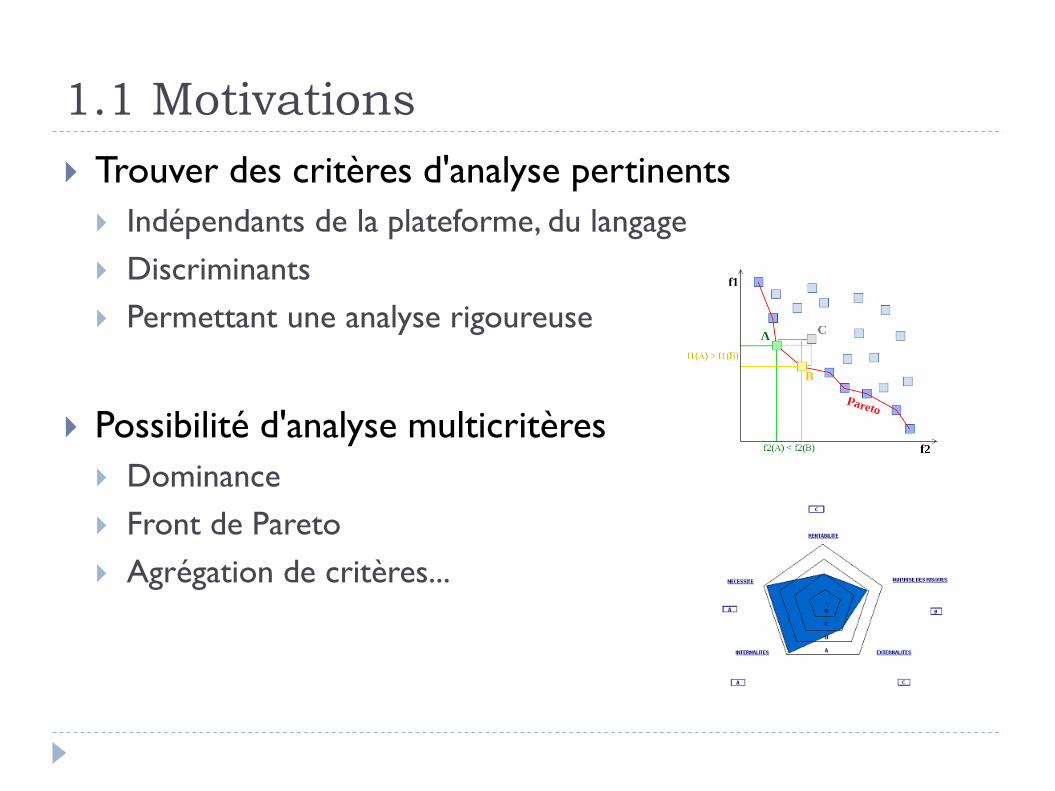
Trouver des critères d'analyse pertinents
Indépendants de la plateforme, du langage
Discriminants
Permettant une analyse rigoureuse
Possibilité d'analyse multicritères
Dominance
Front de Pareto
Agrégation de critères...
1.1 Motivations
Critères d'analyse
Temps de calcul → nombre d'opérations effectuées
Taille mémoire → quantité de mémoire consommée
Communications → nombre d'octets émis/reçus
Typiquement : temps de calcul
Dans ce cours : complexité temporelle des algorithmes
1.2 Définitions
Analyse du temps de calcul : complexité temps
Nombre d'opérations élémentaires effectuées en fonction des
données du problème
Nécessite de définir
Une opération élémentaire
La taille du problème
1.2 Définitions
Opération élémentaire
Opération caractéristique de l'algorithme étudié
Exemples
Recherche dans un tableau (ZZ1) : accès, comparaison
Tri d'un tableau (ZZ1) : comparaison, déplacement
Produit scalaire : multiplication
Minimisation : évaluation d'un point, calcul du gradient
Calcul du PGCD : division, modulo
Enveloppe convexe : test d'un point
1.2 Définitions
Taille du problème
Grandeur caractéristique utilisée par l'algorithme
Exemples
Recherche dans un tableau (ZZ1) : taille du tableau
Tri d'un tableau (ZZ1) : taille du tableau
Produit scalaire : dimension
Minimisation : -
Calcul du PGCD : taille des nombres
Enveloppe convexe : dimension, nombre de points
1.2 Définitions
Trois types de complexité
Dans le pire des cas
Instance pathologique pour l'algorithme
Utilisé le plus souvent car donne une borne supérieure
Dans le meilleur des cas
Instance ”parfaite” pour l'algorithme
En moyenne
Pas d'hypothèses sur l'instance
Plus compliquée à calculer
Donne une idée plus proche du comportement réel
Aussi, complexité amortie…
1.2 Définitions
La complexité est fonction de la taille du problème
Elle peut être compliquée
Exemple : 𝑓 𝑛,𝑚 = 3𝑛 +𝑚2 − 2 log 𝑛 + 3 +𝑚5 𝑛
Précis mais peu pratique
Ordre de grandeur
Expression simplifiée indiquant l'évolution
Même comportement limite que la formule
Simplifie les comparaisons et analyses
1.3 Classes de complexité
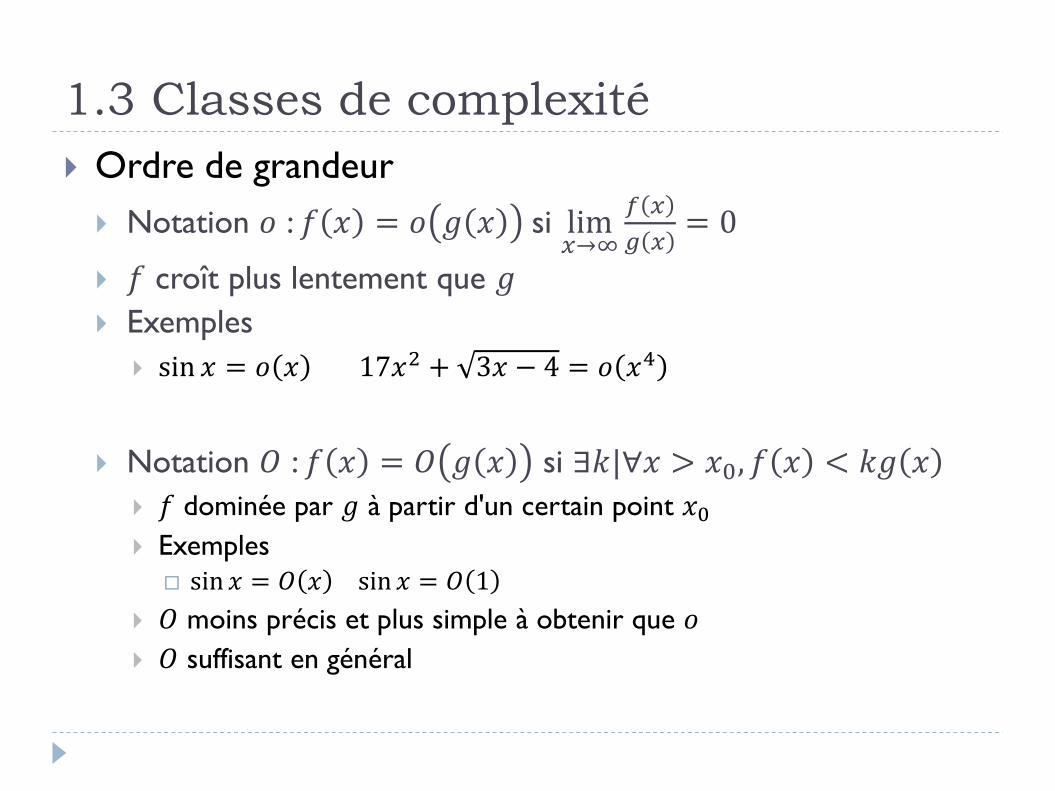
Ordre de grandeur
Notation 𝑜 : 𝑓 𝑥 = 𝑜 𝑔 𝑥 si lim𝑥→∞
𝑓 𝑥
𝑔 𝑥= 0
𝑓 croît plus lentement que 𝑔
Exemples
sin 𝑥 = 𝑜 𝑥 17𝑥2 + 3𝑥 − 4 = 𝑜 𝑥4
Notation 𝑂 : 𝑓 𝑥 = 𝑂 𝑔 𝑥 si ∃𝑘|∀𝑥 > 𝑥0, 𝑓 𝑥 < 𝑘𝑔 𝑥
𝑓 dominée par 𝑔 à partir d'un certain point 𝑥0
Exemples
sin 𝑥 = 𝑂 𝑥 sin 𝑥 = 𝑂 1
𝑂 moins précis et plus simple à obtenir que 𝑜
𝑂 suffisant en général
1.3 Classes de complexité
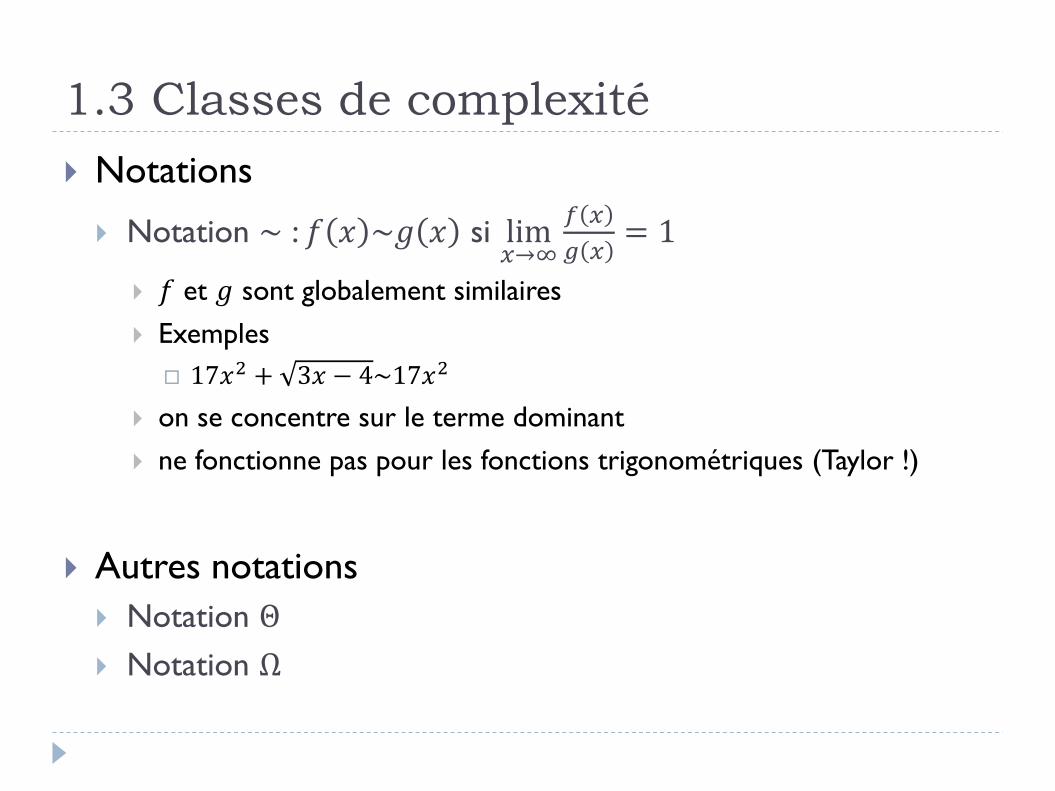
Notations
Notation ~ : 𝑓 𝑥 ~𝑔 𝑥 si lim𝑥→∞
𝑓 𝑥
𝑔 𝑥= 1
𝑓 et 𝑔 sont globalement similaires
Exemples
17𝑥2 + 3𝑥 − 4~17𝑥2
on se concentre sur le terme dominant
ne fonctionne pas pour les fonctions trigonométriques (Taylor !)
Autres notations
Notation Θ
Notation Ω
1.3 Classes de complexité
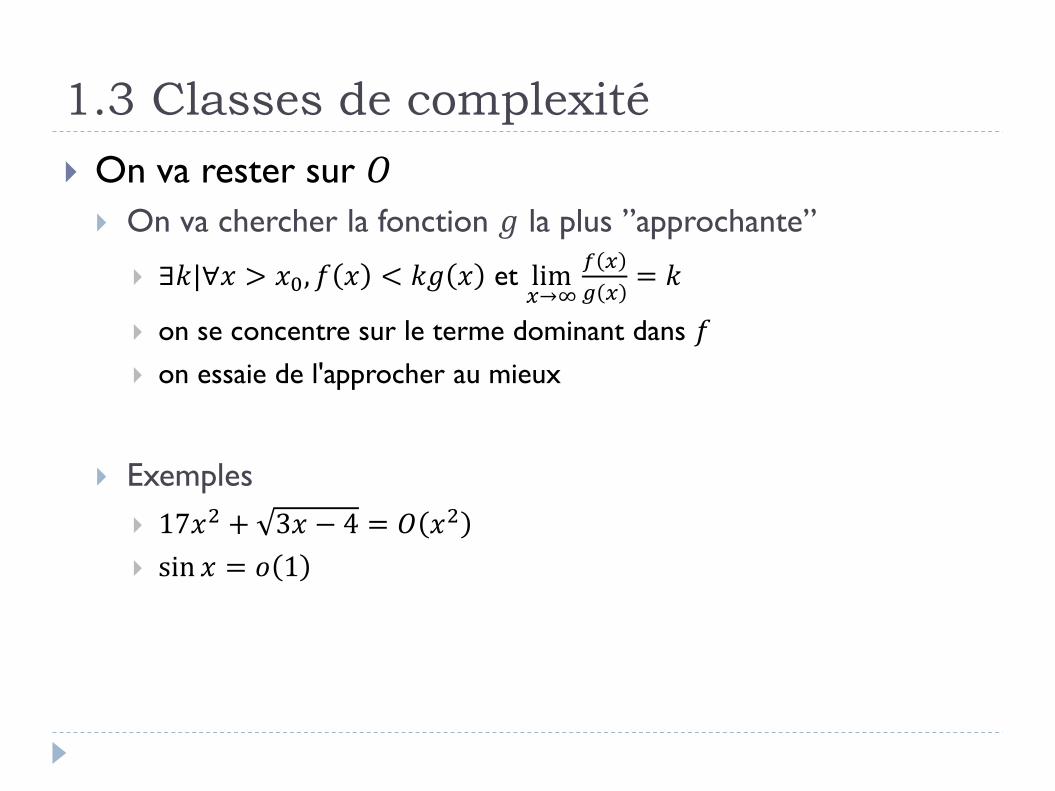
On va rester sur 𝑂
On va chercher la fonction 𝑔 la plus ”approchante”
∃𝑘|∀𝑥 > 𝑥0, 𝑓 𝑥 < 𝑘𝑔 𝑥 et lim𝑥→∞
𝑓 𝑥
𝑔 𝑥= 𝑘
on se concentre sur le terme dominant dans 𝑓
on essaie de l'approcher au mieux
Exemples
17𝑥2 + 3𝑥 − 4 = 𝑂 𝑥2
sin 𝑥 = 𝑜 1
1.3 Classes de complexité
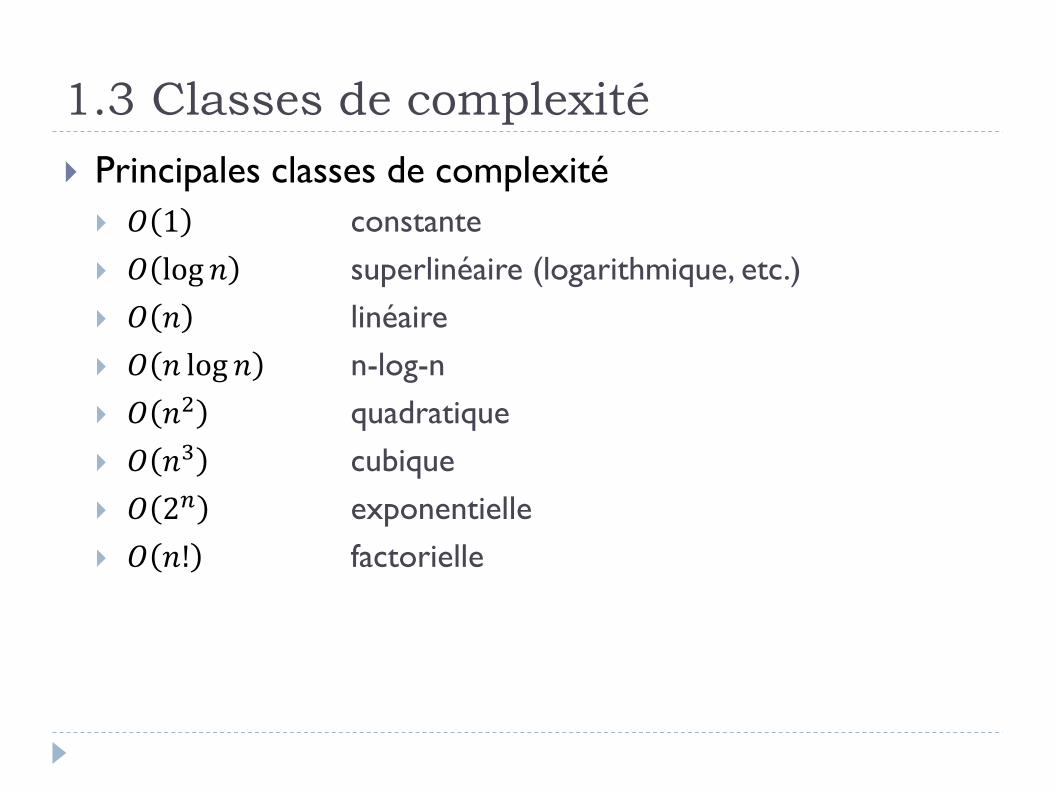
Principales classes de complexité
𝑂 1 constante
𝑂 log 𝑛 superlinéaire (logarithmique, etc.)
𝑂 𝑛 linéaire
𝑂 𝑛 log 𝑛 n-log-n
𝑂 𝑛2 quadratique
𝑂 𝑛3 cubique
𝑂 2𝑛 exponentielle
𝑂 𝑛! factorielle
1.3 Classes de complexité
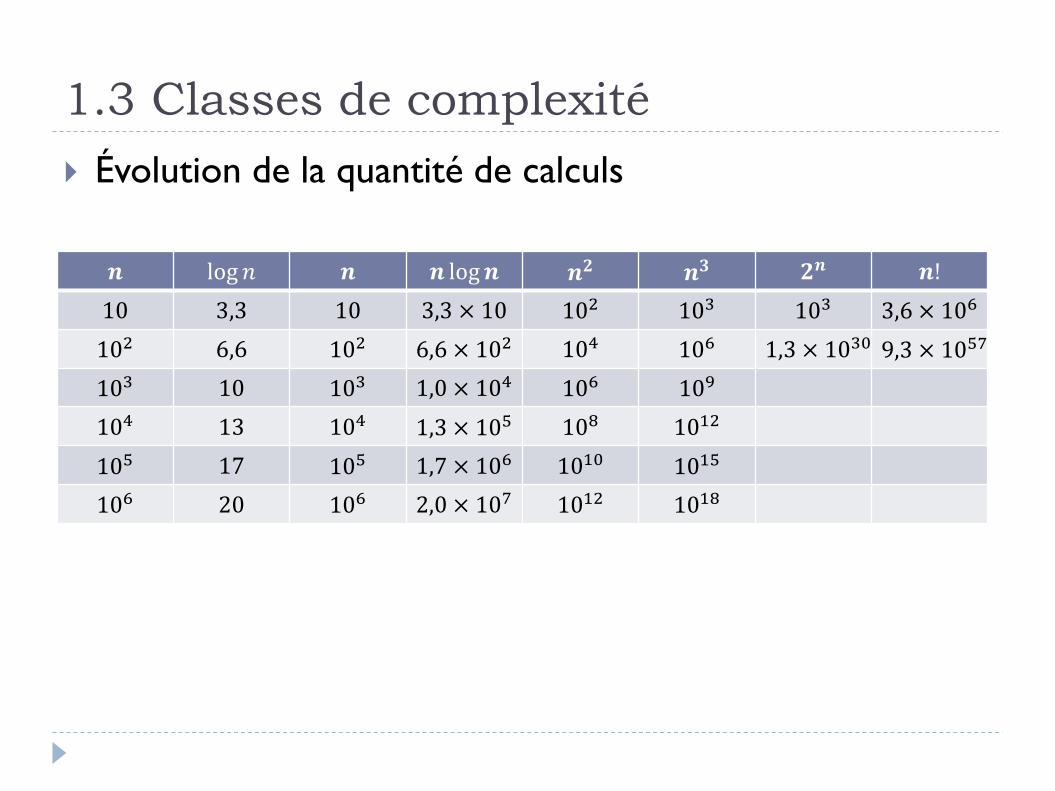
Évolution de la quantité de calculs
𝒏 log 𝑛 𝒏 𝒏 log𝒏 𝒏𝟐 𝒏𝟑 𝟐𝒏 𝒏!
10 3,3 10 3,3 × 10 102 103 103 3,6 × 106
102 6,6 102 6,6 × 102 104 106 1,3 × 1030 9,3 × 1057
103 10 103 1,0 × 104 106 109
104 13 104 1,3 × 105 108 1012
105 17 105 1,7 × 106 1010 1015
106 20 106 2,0 × 107 1012 1018
1.3 Classes de complexité
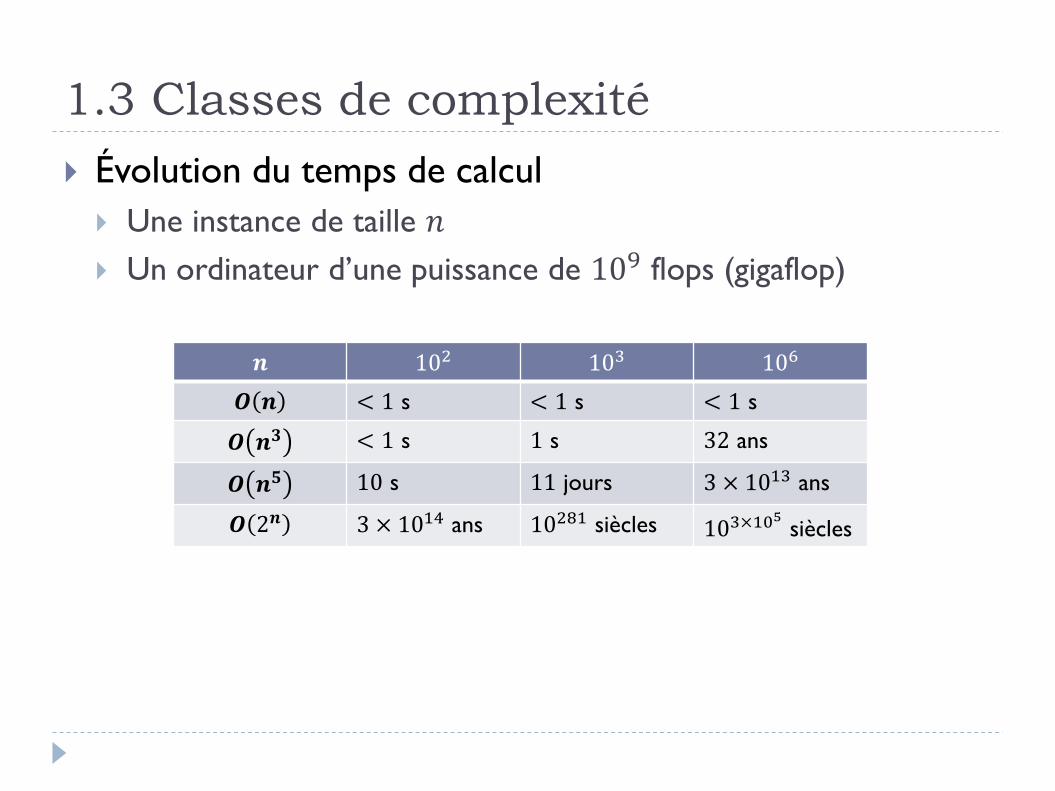
Évolution du temps de calcul
Une instance de taille 𝑛
Un ordinateur d’une puissance de 109 flops (gigaflop)
𝒏 102 103 106
𝑶 𝒏 < 1 s < 1 s < 1 s
𝑶 𝒏𝟑 < 1 s 1 s 32 ans
𝑶 𝒏𝟓 10 s 11 jours 3 × 1013 ans
𝑶 2𝒏 3 × 1014 ans 10281 siècles 103×105 siècles
1.3 Classes de complexité
Remarques
Pour des problèmes de petite taille, les termes constants ne
doivent pas être négligés
Exemple
0,00001𝑛3 vs. 𝑛2
On compare souvent sur l'asymptotique...
Conséquence
Rechercher l'algorithme offrant la meilleure complexité
Techniques pour réduire la complexité
1.4 Calcul de complexité
Calcul de la complexité
Évaluer le nombre d'opérations élémentaires
Considérer chaque étape de l'algorithme
Faire la somme des appels
Déduire l'ordre de grandeur
Nécessite de connaître quelques formules
Sommations
Récurrences
Limites
1.4 Calcul de complexité
Rappels sur les séries
1.4 Calcul de complexité
Rappels sur les relations de récurrence
1.4 Calcul de complexité
Rappels sur les limites
1.4 Calcul de complexité
Exercices
Addition, multiplication matricielle
Recherche linéaire, dichotomique, interpolation
Tri insertion, sélection, rapide, histogramme
2. Conception d’algorithmes
3. Problèmes NP-complets
Complexité d'un problème
Souvent plusieurs algorithmes possibles
Complexité du meilleur algorithme associé
Exemples
Recherche dans un tableau de taille 𝑛
𝑂 𝑛 s’il n’est pas trié
𝑂 log𝑛 s’il est trié
Tri dans un tableau de taille 𝑛
𝑂 𝑛 log 𝑛
Résolution de systèmes linéaires de taille 𝑛 × n
𝑂 𝑛2
3. Problèmes NP-complets
Complexité d'un problème
Permet de connaître la classe d'un problème
Prouver qu'on ne peut faire mieux est complexe
Beaucoup de problèmes ouverts
Multiplication matricielle
Test de primalité
Problèmes combinatoires...
3. Problèmes NP-complets
Au final, 2 catégories de problèmes
Les problèmes ”faciles”
faible complexité : 𝑂 1 → 𝑂 𝑛𝑘
existence d'algorithmes efficaces (pour 𝑘 petit !)
Les problèmes ”difficiles”
forte complexité : 𝑂 2𝑛 , 𝑂 𝑛!
absence d'algorithmes efficaces
contiennent souvent une structure combinatoire
3. Problèmes NP-complets
Problèmes de décision
Leur réponse est oui / non
Utilisés pour la définition des classes P et NP
Exemples
PREMIER(a) : le nombre a est-il un premier ?
CONNEXE(G) : G est-il connexe ?
PCC(G,p) : le chemin p est-il le plus court ?
Problèmes d'optimisation traités ”par la bande”
3. Problèmes NP-complets
Classe P (polynômial)
Problèmes de décision qui peuvent être résolus par un
algorithme fortement polynômial
Fortement polynômial
indépendant de la grandeur des données
Exemples
CONNEXE(G) : algo de parcours BFS
CHEMIN(G,o,d) : algo de parcours BFS
PREMIER(a) : algo de Aggarwal et al.
3. Problèmes NP-complets
Classe NP (polynômial non-déterministe)
Problèmes de décision qui peuvent être résolus par un
algorithme non-déterministe fortement polynômial
Définition plus compliquée que pour P
À chaque étape, l'algorithme a plusieurs choix
Réponse ”oui” : il existe une séquence de branchements tels
que l'algorithme trouve
Réponse ”non” : quelque soit la séquence de branchements,
l'algorithme ne trouve pas
3. Problèmes NP-complets
Classe NP
Exemples
HAMILTONIEN(G,o,d) : existe-t-il un chemin hamiltonien de o à d
dans G ?
COLORATION(G,k) : G peut-il être colorié avec k couleurs ?
SAT(f,x) : existe-t-il un vecteur x satisfaisant f ?
De petites modifications peuvent changer la classe
3-SAT est de classe NP, 2-SAT est de classe P
HAMILTONIEN(G,o,d) est de classe NP, EULERIEN(G,o,d) est de
classe P
3. Problèmes NP-complets
Relation P ↔ NP
Trivialement P dans NP
”qui peut le plus, peut le moins”
Question ouverte : P = NP ?
sans réponse depuis 30 ans
un des 7 problèmes du Millennium Prize
à vous de répondre !
3. Problèmes NP-complets
Classe Indécidable
Problèmes pour lesquels on ne connait pas d'algorithme qui
réponde en un nombre fini d'étapes
Exemple
HALT(P) : le programme P se termine-t-il ?
DIOPHANTE(E) : l'équation diophantienne E a-t-elle une solution ?
3. Problèmes NP-complets
Classe Co-NP
Étant donné un problème, son complémentaire consiste à
échanger les réponses
Exemple
COMPOSE(a) : le nombre a est-il composé ?
PREMIER(a) : le nombre a est-il premier ?
change radicalement la nature de la question (il existe / quelque soit)
Un problème est dans Co-NP si le complémentaire est dans
NP
3. Problèmes NP-complets
Réduction
Deux problèmes A et B
Une transformation f : A → B
un algorithme pour B résoud les instances de A
Si f est polynômiale
réduction polynômiale
si B est dans P alors A est dans P
Classe NP-difficile
Si tout problème NP peut se réduire polynomialement à A
3. Problèmes NP-complets
Classe NP-complet
Problème NP-difficile qui est dans NP
Intérêt
un algo pour un problème NP-complet peut, de fait, résoudre
tous les problèmes NP
s'il existe un algo polynômial pour un problème NP-complet,
alors P = NP
Théorème de Cook (1971) : SAT est NP-complet
Karp (1972) : 21 problèmes NP-complets
3. Problèmes NP-complets
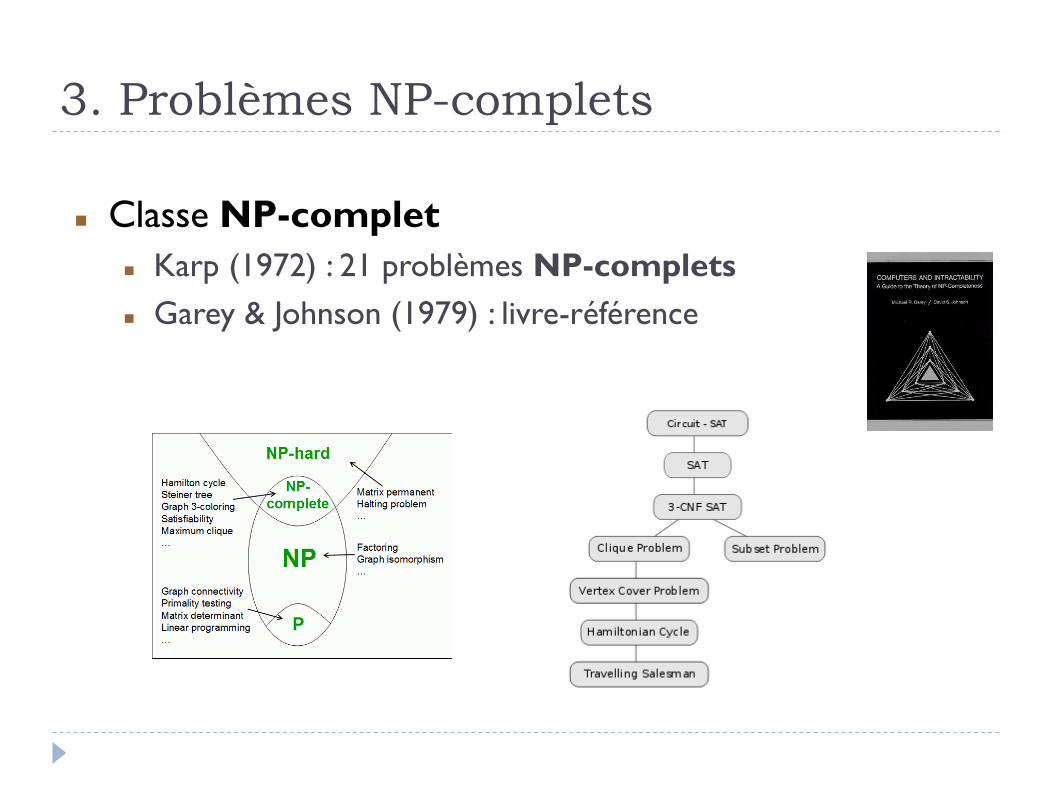
Classe NP-complet
Karp (1972) : 21 problèmes NP-complets
Garey & Johnson (1979) : livre-référence
3. Problèmes NP-complets
SAT(f)
Une formule booléenne est une expression (à base de AND,
OR, NOT et ()) de variables booléennes
Forme Normale Conjonctive
conjonction de clauses (disjonctions de litéraux)
ex :
𝑓 𝑎, 𝑏, 𝑐, 𝑑, 𝑒 = ¬𝑎 ∨ 𝑏 ∨ 𝑐 ∨ ¬𝑑 ∧ ¬𝑏 ∨ 𝑒 ∧ ¬𝑐 ∨ 𝑑 ∨ ¬𝑒
Existe-t-il un vecteur satisfaisant la formule ?
ex : 𝐹 𝐹 𝐹 𝑉 𝑉
Problème fondamental de la classe NP-complet
Applications pratiques (logique, électronique...)
3. Problèmes NP-complets
3-SAT(f)
Idem à SAT avec des clauses d'au plus 3 litéraux
Exemple :
𝑓 𝑎, 𝑏, 𝑐 = ¬𝑎 ∨ 𝑏 ∨ 𝑐 ∧ ¬𝑏 ∨ 𝑐 ∧ 𝑎 ∨ 𝑏 ∨ ¬𝑐
Existe-t-il un vecteur satisfaisant la formule ?
Exemple : 𝐹 𝐹 𝐹
Par contre 2-SAT est dans la classe P
3. Problèmes NP-complets
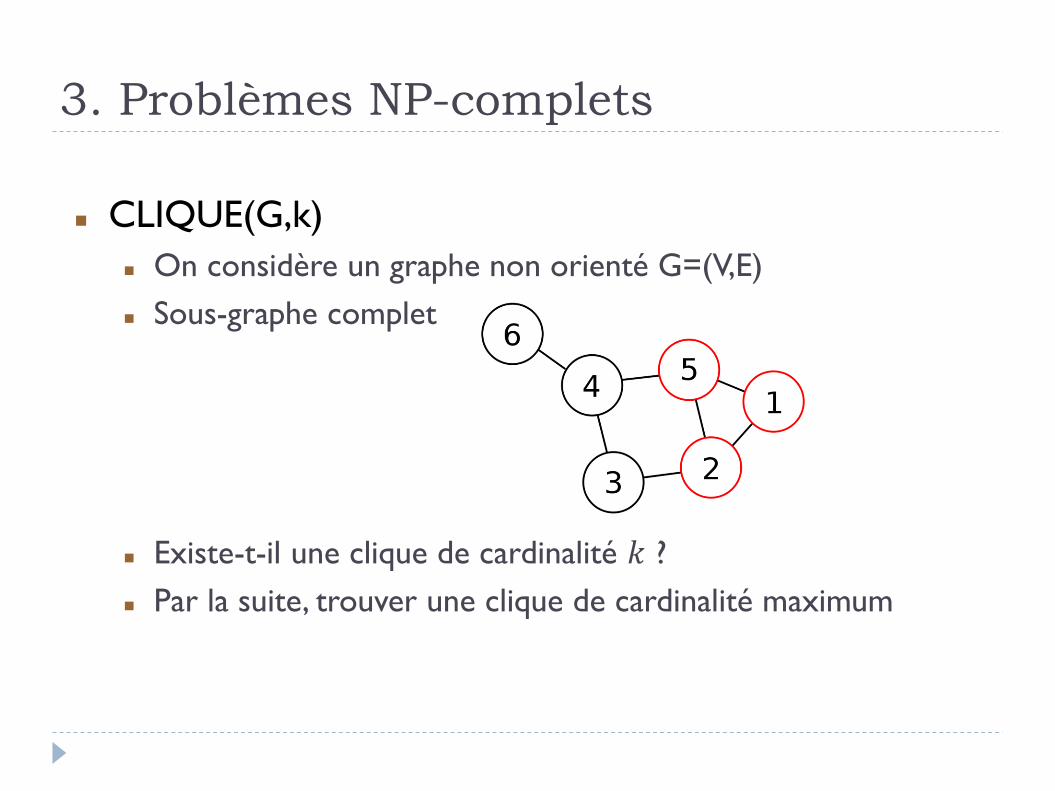
CLIQUE(G,k)
On considère un graphe non orienté G=(V,E)
Sous-graphe complet
Existe-t-il une clique de cardinalité 𝑘 ?
Par la suite, trouver une clique de cardinalité maximum
3. Problèmes NP-complets
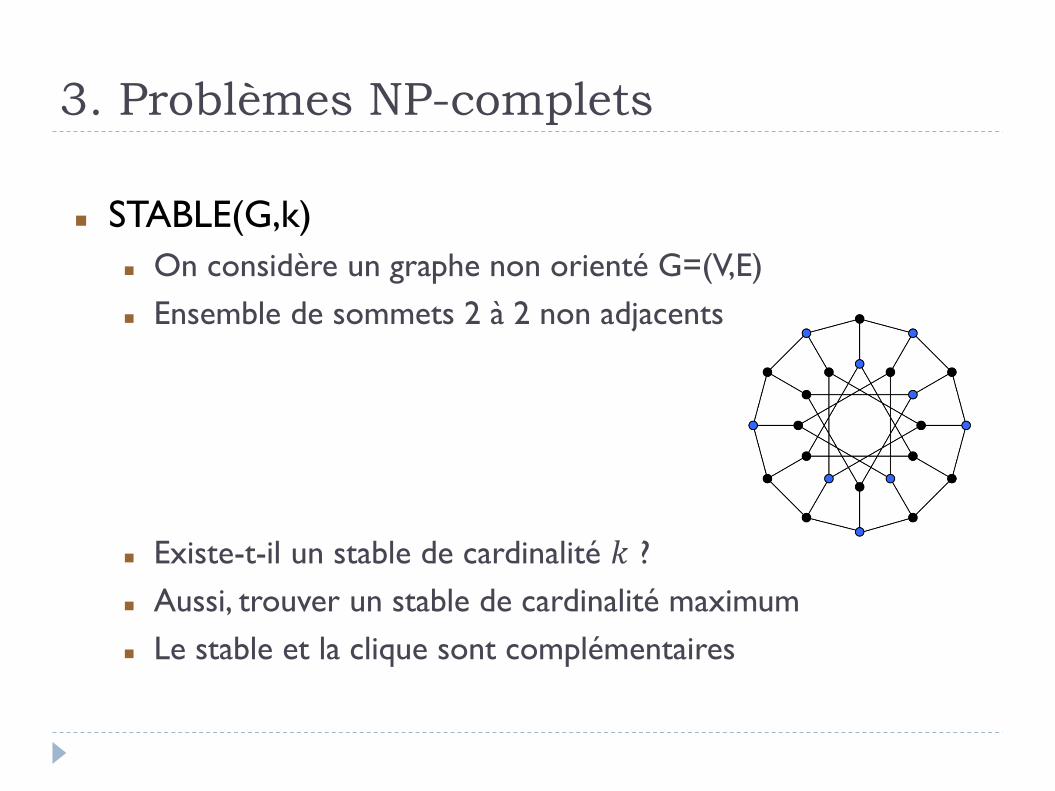
STABLE(G,k)
On considère un graphe non orienté G=(V,E)
Ensemble de sommets 2 à 2 non adjacents
Existe-t-il un stable de cardinalité 𝑘 ?
Aussi, trouver un stable de cardinalité maximum
Le stable et la clique sont complémentaires
3. Problèmes NP-complets
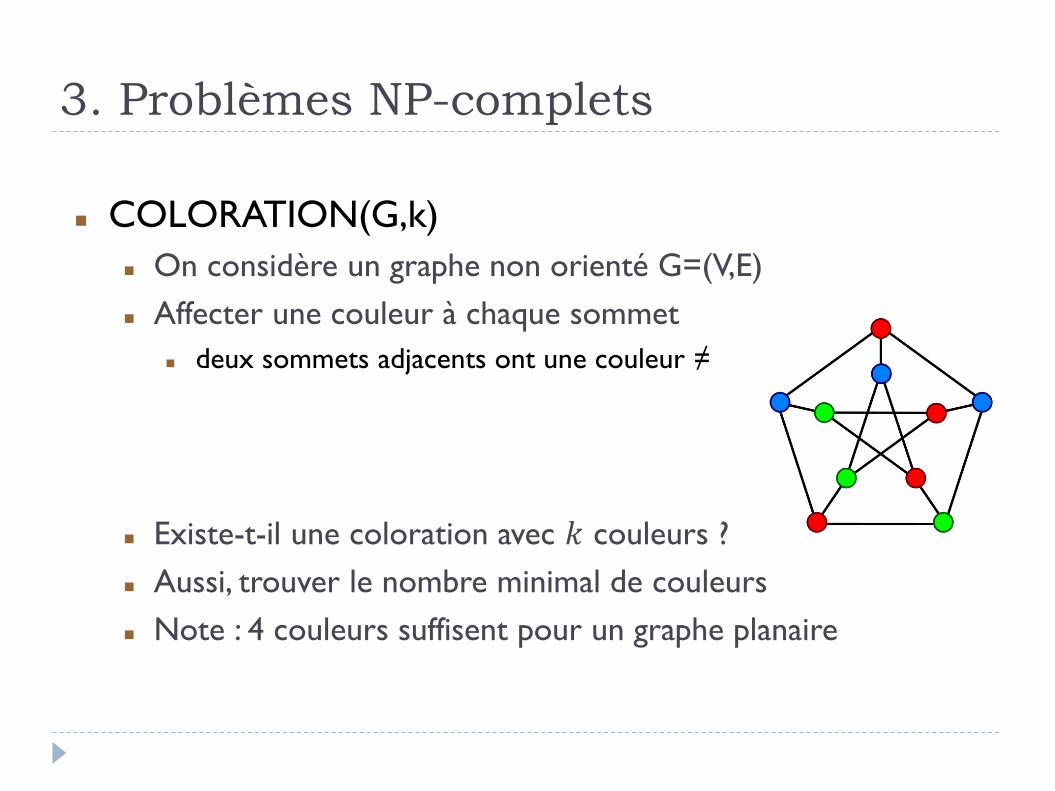
COLORATION(G,k)
On considère un graphe non orienté G=(V,E)
Affecter une couleur à chaque sommet
deux sommets adjacents ont une couleur ≠
Existe-t-il une coloration avec 𝑘 couleurs ?
Aussi, trouver le nombre minimal de couleurs
Note : 4 couleurs suffisent pour un graphe planaire
3. Problèmes NP-complets
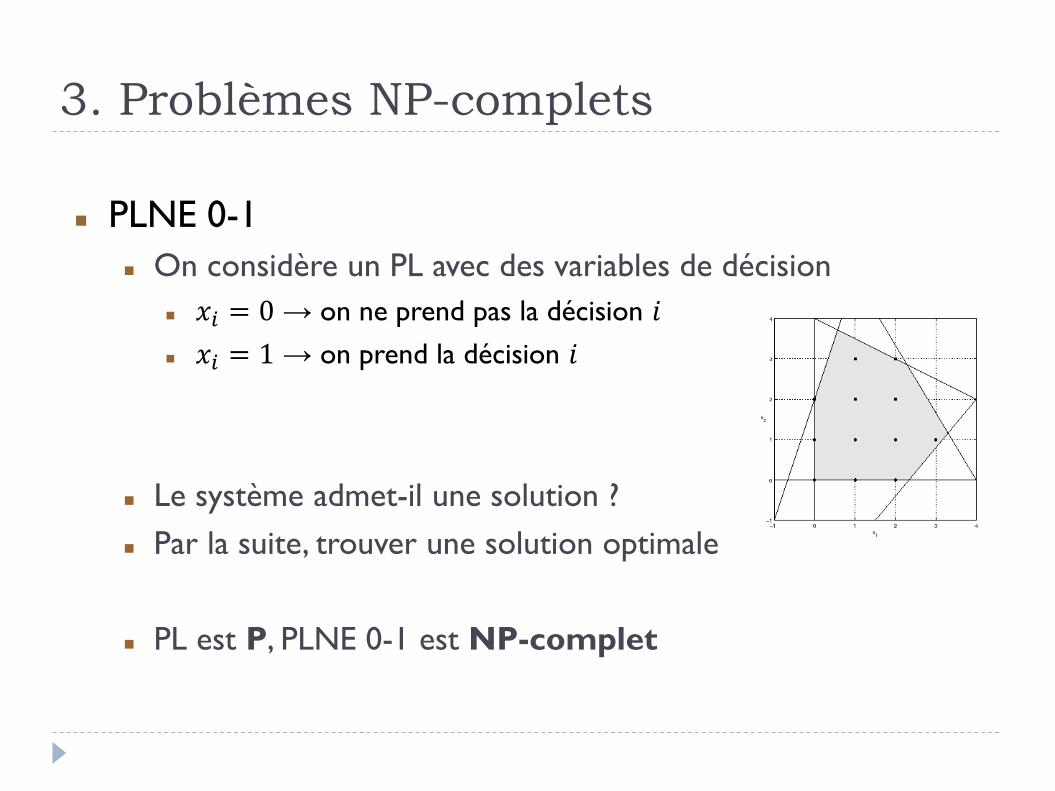
PLNE 0-1
On considère un PL avec des variables de décision
𝑥𝑖 = 0 → on ne prend pas la décision 𝑖
𝑥𝑖 = 1 → on prend la décision 𝑖
Le système admet-il une solution ?
Par la suite, trouver une solution optimale
PL est P, PLNE 0-1 est NP-complet
3. Problèmes NP-complets
SUBSET-SUM
On a un ensemble de 𝑛 entiers 𝐸 = 𝑒1, … , 𝑒𝑛
On a un entier 𝑆
Existe-t-il une partie de 𝐸 de somme 𝑆 ?
Exemple : 𝐸 = −3,−1,2,6
pour 𝑆 = 0, pas de solution
pour 𝑆 = 1, 𝐸′ = −1,2
pour 𝑆 = 2, 𝐸′ = 2 ou 𝐸′ = −3,−1,6
3. Problèmes NP-complets
SAC-A-DOS(c,p,P)
On considère 𝑛 objets d'intérêt 𝑐𝑖 et de poids 𝑝𝑖 On a une limite de poids total 𝑃
Existe-t-il une combinaison d'objets de poids 𝑃 ?
Aussi, trouver un ensemble viable d'intérêt max
Exemple : 𝑂 = 1,2 8,10 7,3 4,1
𝑃 = 12, 𝑂′ = 1,2 7,3 4,1 , intérêt = 12, poids = 6
3. Problèmes NP-complets
Liens entre SUBSET-SUM et SAC-A-DOS
SAC-A-DOS peut résoudre SUBSET-SUM
On garde la contrainte de capacité
L'intérêt d'un entier est sa valeur
Si la solution de SAC-A-DOS sature la contrainte alors c'est une
solution de SUBSET-SUM
Sinon SUBSET-SUM n'a pas de solution
SUBSET-SUM est un problème d'existence
SAC-A-DOS est un problème d'optimisation
3.1 Méthodes exactes
Méthodes d'énumération
Forte complexité
Limitées à certains problèmes et à certaines tailles
Programmation Linéaire en Nombres Entiers
Reprend le formalisme de la PL
Considère des variables entières, modélisant
des quantités entières
des décisions
3.1 Méthodes exactes
Variables de décision 𝑥𝑖 ∈ 0,1
Ne peuvent prendre que deux valeurs : 0 ou 1
𝑥𝑖 = 1 on prend la décision 𝑖
𝑥𝑖 = 0 on ne prend pas la décision 𝑖
Modélise ”simplement” des situations booléennes
Toute variable entière peut s'exprimer en décision
𝑥 ∈ ℕ → 𝑥 = 2𝑖𝑦𝑖𝑖=1…𝑘 avec 𝑦𝑖 ∈ 0,1
3.1 Méthodes exactes
Résolution d'un PLNE
Branch & Bound (séparation / évaluation)
On relâche les contraintes d'intégrité du problème
On résoud le problème relâché
Si la solution est fractionnaire
il existe au moins une variable fractionnaire
on effectue un branchement dessus
stratégie récursive
3.1 Méthodes exactes
Stratégies évoluées
Branch & Cut (génération de coupes)
Branch & Price (génération de colonnes)
Relaxation lagrangienne
Méthodes de décomposition
Dantzig-Wolfe
Benders
décomposition lagrangienne, ...
Programmation dynamique, ...
3.2 Méthodes approchées
Lorsque les problèmes sont de classe NP
Temps de calcul explose sur les grosses instances
Se tourner vers des méthodes approchées
on ne garantit plus l'optimalité de la solution
on réduit fortement les temps de calcul
compromis entre le temps et la qualité
3 grandes catégories
heuristiques
métaheuristiques
algorithmes d'approximation
3.2 Méthodes approchées
Heuristiques
Principe général
les bonnes solutions ont certaines propriétés
contruire des solutions favorisant ces propriétés
La contruction doit rester polynômiale
souvent un algorithme glouton
à chaque itération de l'algorithme, on ne remet pas en cause les
choix précédents
3.2 Méthodes approchées
Algorithmes gloutons
Algorithme itératif, choix irréversibles
le choix fixe une (des) variable(s) du problème
on réitère sur le reste du problème
équivaut à une descente dans l'arbre des choix
ne garantit pas l'optimalité (ni même la réalisabilité)
sauf si le choix est optimal
Si le choix à chaque itération est optimal
Alors c’est une méthode exacte (et itérative)
Exemples
recherche séquentielle/dichotomique, tri sélection
algorithmes de Prim, Kruskal, Dijkstra
3.2 Méthodes approchées
Heuristiques
Deux types d'heuristiques
Contructives
on part de rien
on construit progressivement une solution
on itère jusqu'à la solution complète
d'amélioration
on part d'une solution
à chaque itération on la modifie (un peu)
on itère jusqu'à ne plus pouvoir améliorer
3.2 méthodes heuristiques
Heuristiques de construction
On part de la solution vide
À chaque itération
on a une liste d'éléments possibles à ajouter
on prend le meilleur (critère de sélection)
Jusqu'à obtention d'une solution
Critère de sélection polynômial (linéaire si possible)
Nombre d'itérations polynômial
Complexité polynômiale
3.2 Méthodes approchées
Mise en application : SAC-A-DOS(c,p,P)
on trie les objets selon le ratio 𝑐𝑖 𝑝𝑖 décroissant
dans cet ordre
on prend l'objet si la capacité n'est pas violée
on passe au suivant
équivalent à une descente dans l'arbre des choix possibles
1 niveau par objet
pour chaque noeud, 2 branches (prend ou pas)
1 feuille = solution
3.2 méthodes heuristiques
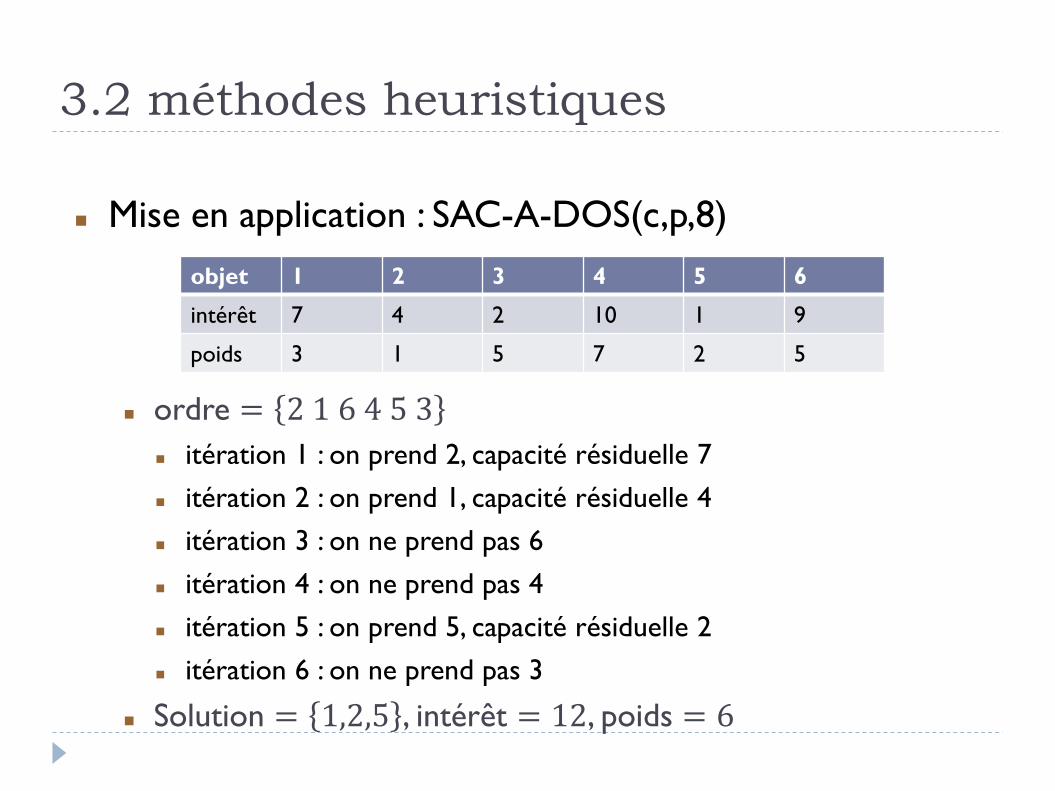
Mise en application : SAC-A-DOS(c,p,8)
ordre = 2 1 6 4 5 3
itération 1 : on prend 2, capacité résiduelle 7
itération 2 : on prend 1, capacité résiduelle 4
itération 3 : on ne prend pas 6
itération 4 : on ne prend pas 4
itération 5 : on prend 5, capacité résiduelle 2
itération 6 : on ne prend pas 3
Solution = 1,2,5 , intérêt = 12, poids = 6
objet 1 2 3 4 5 6
intérêt 7 4 2 10 1 9
poids 3 1 5 7 2 5
3.2 méthodes heuristiques
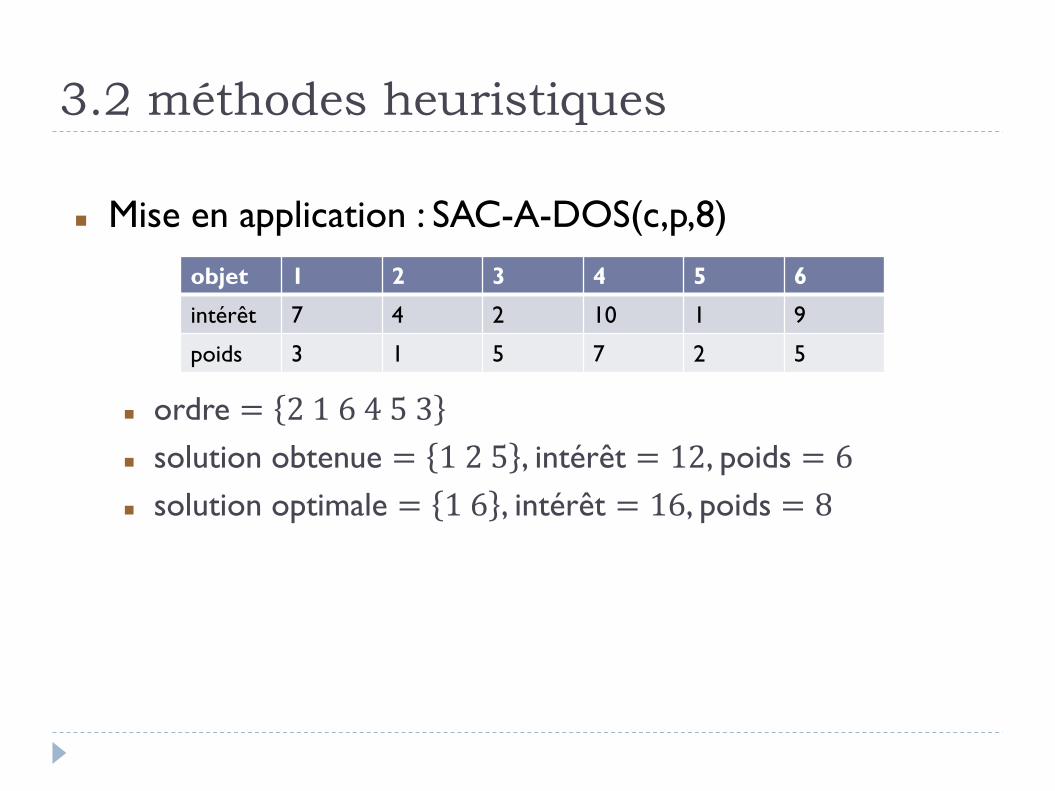
Mise en application : SAC-A-DOS(c,p,8)
ordre = 2 1 6 4 5 3
solution obtenue = 1 2 5 , intérêt = 12, poids = 6
solution optimale = 1 6 , intérêt = 16, poids = 8
objet 1 2 3 4 5 6
intérêt 7 4 2 10 1 9
poids 3 1 5 7 2 5
3.2 méthodes heuristiques
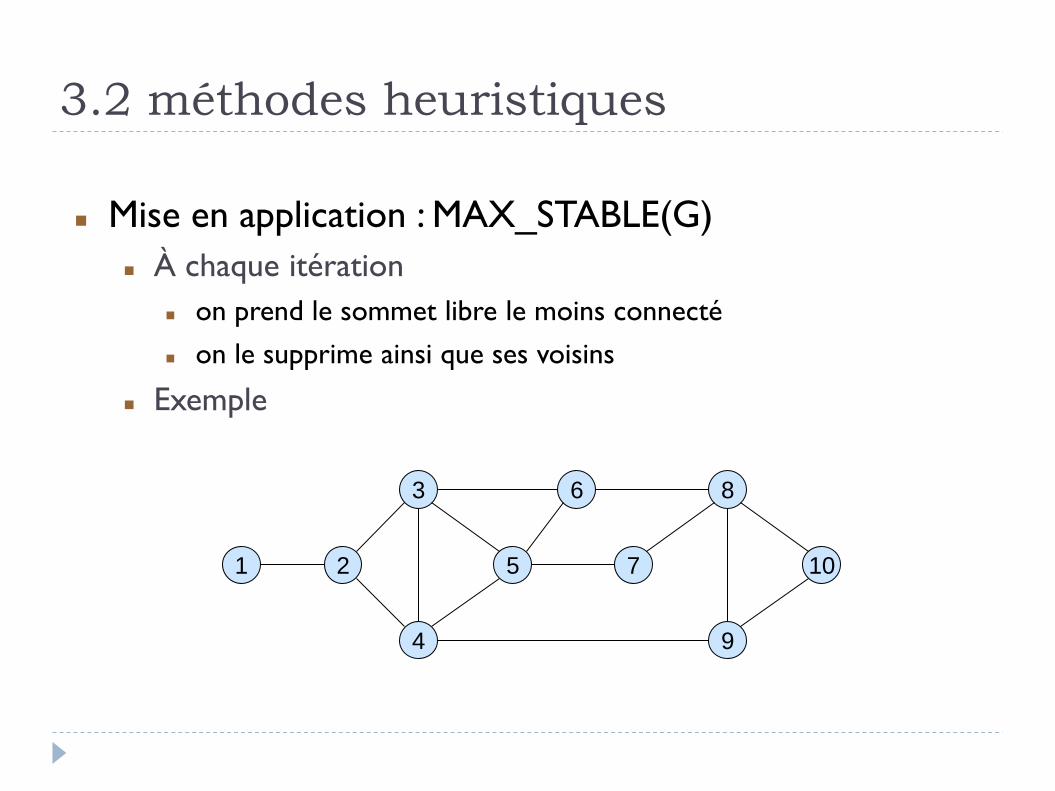
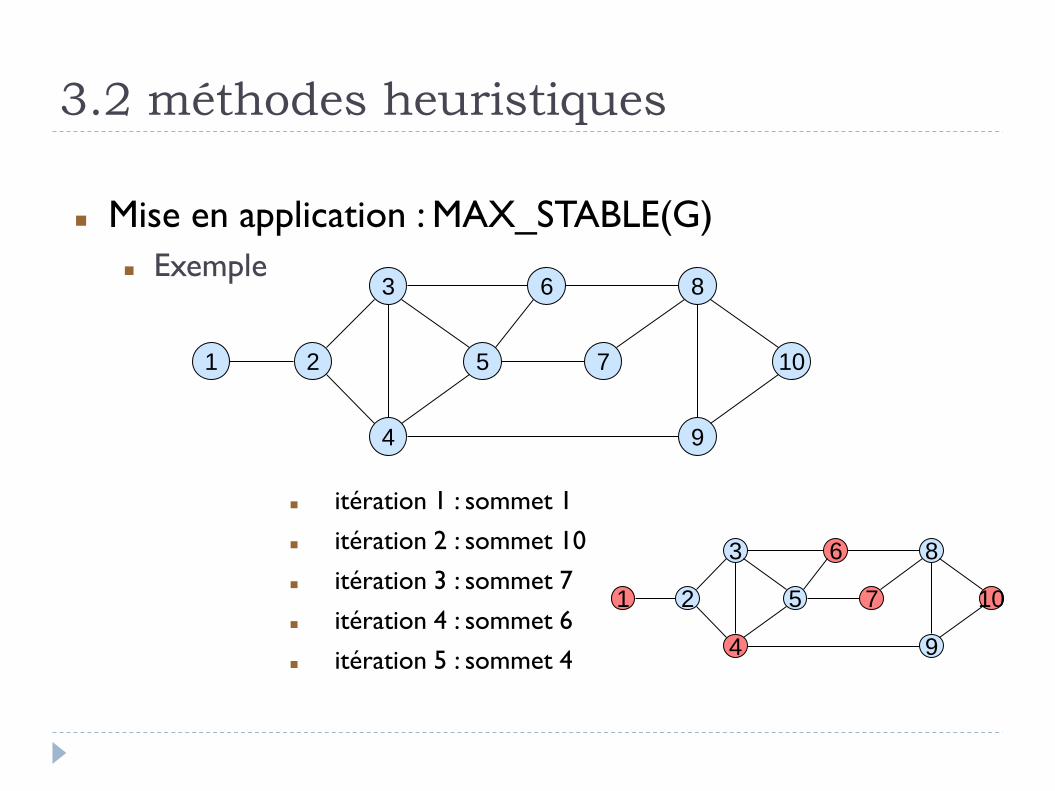
Mise en application : MAX_STABLE(G)
À chaque itération
on prend le sommet libre le moins connecté
on le supprime ainsi que ses voisins
Exemple
2
3
4
8
9
7 10 5
6
1
3.2 méthodes heuristiques
Mise en application : MAX_STABLE(G)
Exemple
itération 1 : sommet 1
itération 2 : sommet 10
itération 3 : sommet 7
itération 4 : sommet 6
itération 5 : sommet 4
2
3
4
8
9
7 10 5
6
1
2
3
4
8
9
7 10 5
6
1
3.2 méthodes heuristiques
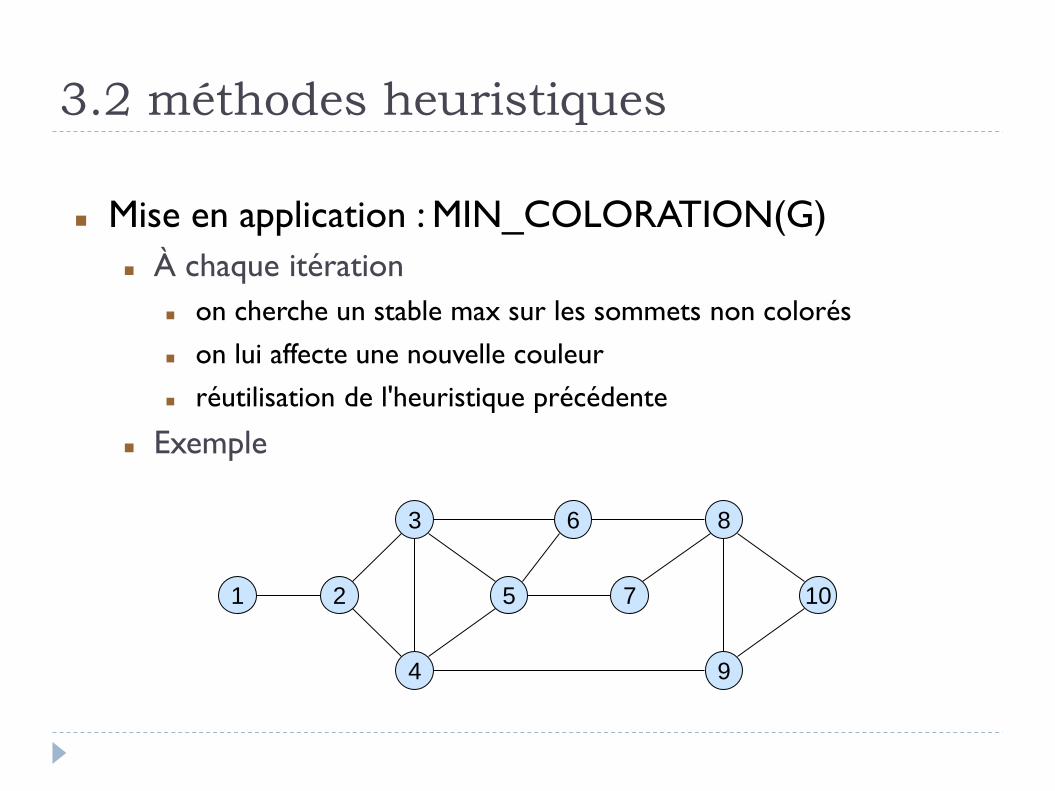
Mise en application : MIN_COLORATION(G)
À chaque itération
on cherche un stable max sur les sommets non colorés
on lui affecte une nouvelle couleur
réutilisation de l'heuristique précédente
Exemple
2
3
4
8
9
7 10 5
6
1
3.2 méthodes heuristiques
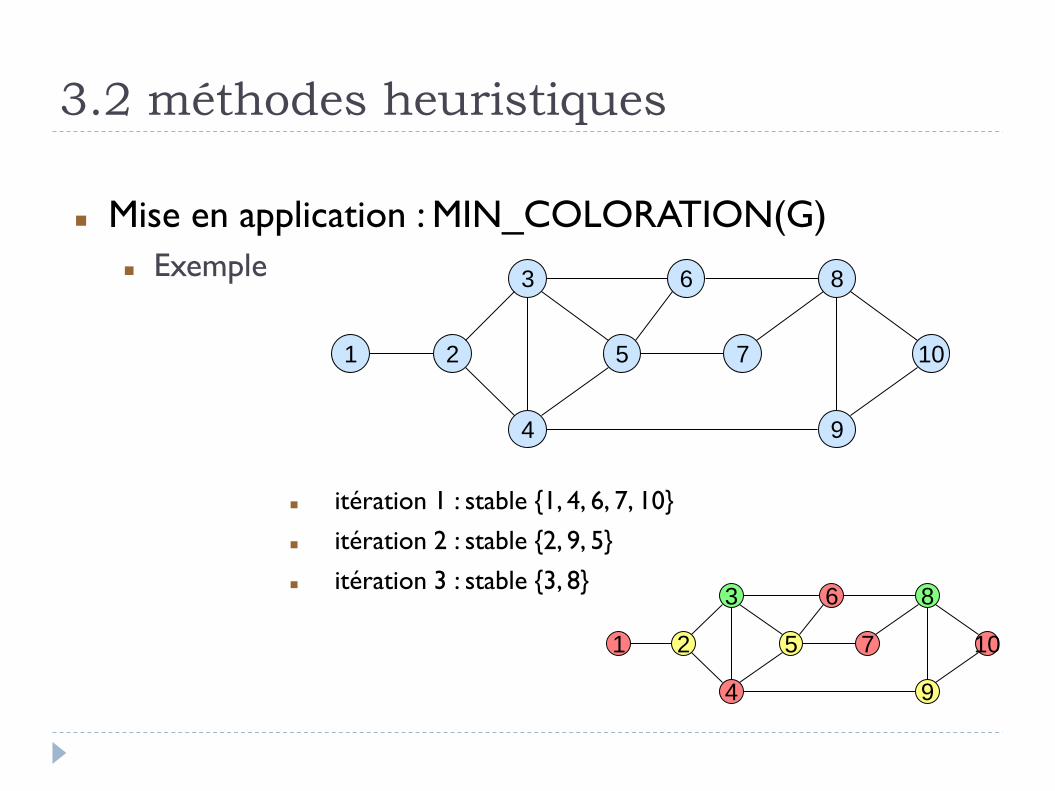
Mise en application : MIN_COLORATION(G)
Exemple
itération 1 : stable {1, 4, 6, 7, 10}
itération 2 : stable {2, 9, 5}
itération 3 : stable {3, 8}
2
3
4
8
9
7 10 5
6
1
2
3
4
8
9
7 10 5
6
1
3.2 méthodes heuristiques
Heuristiques d'amélioration : principe
On part d'une solution réalisable
À chaque itération
on a une liste de modifications améliorantes
on en applique une (critère de sélection)
Jusqu'à ne plus pouvoir améliorer
Critère de sélection polynômial (linéaire si possible)
Nombre d'itérations pseudo-polynômial (valeur)
Complexité souvent pseudo-polynômiale
3.2 méthodes heuristiques
Heuristiques d'amélioration : voisinage
Repose sur la notion de mouvement
Notion fondamentale pour les recherches locales
𝑆 : espace des solutions
solution courante 𝑠0 ∈ 𝑆
un type de modification 𝑡
voisinage 𝑉𝑡 𝑠𝑜 : ensemble des solutions obtenues en appliquant 𝑡 sur 𝑠0 de toutes les manières possibles
3.2 méthodes heuristiques
Exemples de voisinage
Stable
supprimer/ajouter/échanger des sommets
Coloration
changer la couleur d'un sommet (stable)
Sac-à-dos
supprimer/ajouter/échanger des objets
3.2 méthodes heuristiques
Heuristiques d'amélioration : voisinage
Gestion du voisinage
Exploration
complète : on visite tous les voisins
partielle : on ne visite qu'une partie du voisinage
premier réalisable
𝑘 voisins
Sélection
Meilleur voisin
premier voisin améliorant
un voisin au hasard
3.2 méthodes heuristiques
Heuristiques d'amélioration : distance
Soit 𝑡 un type de modification
Distance 𝑑𝑡 𝑠1, 𝑠2 entre deux solutions 𝑠1 et 𝑠2
nombre minimal de mouvements de type 𝑡 pour aller de 𝑠1 à 𝑠2
conditions pour définir une métrique
non-négative : 𝑑𝑡 𝑠1, 𝑠2 ≥ 0
élément nul : 𝑑𝑡 𝑠1, 𝑠2 = 0 ⇔ 𝑠1 = 𝑠2
symétrie : 𝑑𝑡 𝑠1, 𝑠2 = 𝑑𝑡 𝑠2, 𝑠1
inégalité triangulaire : 𝑑𝑡 𝑠1, 𝑠2 ≤ 𝑑𝑡 𝑠1, 𝑠3 + 𝑑𝑡 𝑠3, 𝑠2
3.2 méthodes heuristiques
Heuristiques d'amélioration : optimum
Soit 𝑡 un type de modification
𝑠0 est un optimum local si
𝑓 𝑠0 ≤ 𝑓 𝑠 , ∀𝑠 ∈ 𝑉𝑡 𝑠0
𝑠0 est un optimum global si
𝑓 𝑠0 ≤ 𝑓 𝑠 , ∀𝑠 ∈ 𝑆
𝑓 𝑠0 ≤ 𝑓 𝑠 , ∀𝑡 ∀𝑠 ∈ 𝑉𝑡 𝑠0
les deux critères sont aussi compliqués à vérifier
3.2 méthodes heuristiques
Heuristiques d'amélioration: SAC-A-DOS(c,p,P)
Voisinage 1
ajout d'un objet
fonctionne sur des solutions quelconques
mais pas sur les solutions de l'heuristique vue précédemment
(pourquoi ?)
complexité = 𝑂 𝑛
Voisinage 2
suppression d'un objet + ajout d'un autre
complexité = 𝑂 𝑛2
3.2 méthodes heuristiques
Heuristiques d'amélioration : MAX_STABLE(G)
Voisinage 1
ajout d'un sommet
fonctionne sur des solutions quelconques
mais pas sur les solutions de l'heuristique vue précédemment
(pourquoi ?)
complexité = 𝑂 𝑛
Voisinage 2
suppression d'un sommet + ajout d'un autre
complexité = 𝑂 𝑛2
3.2 méthodes heuristiques
Heuristiques d'amélioration : MIN_COLORATION(G)
Voisinage 1
changement de la couleur d'un sommet
complexité = 𝑂 𝑘𝑛2
Voisinage 2
extraire 𝑘 sommets
les réinsérer en les coloriant
Voisinage 3
extraire 𝑘 sommets indépendants
créer une nouvelle couleur pour eux
3.2 méthodes heuristiques
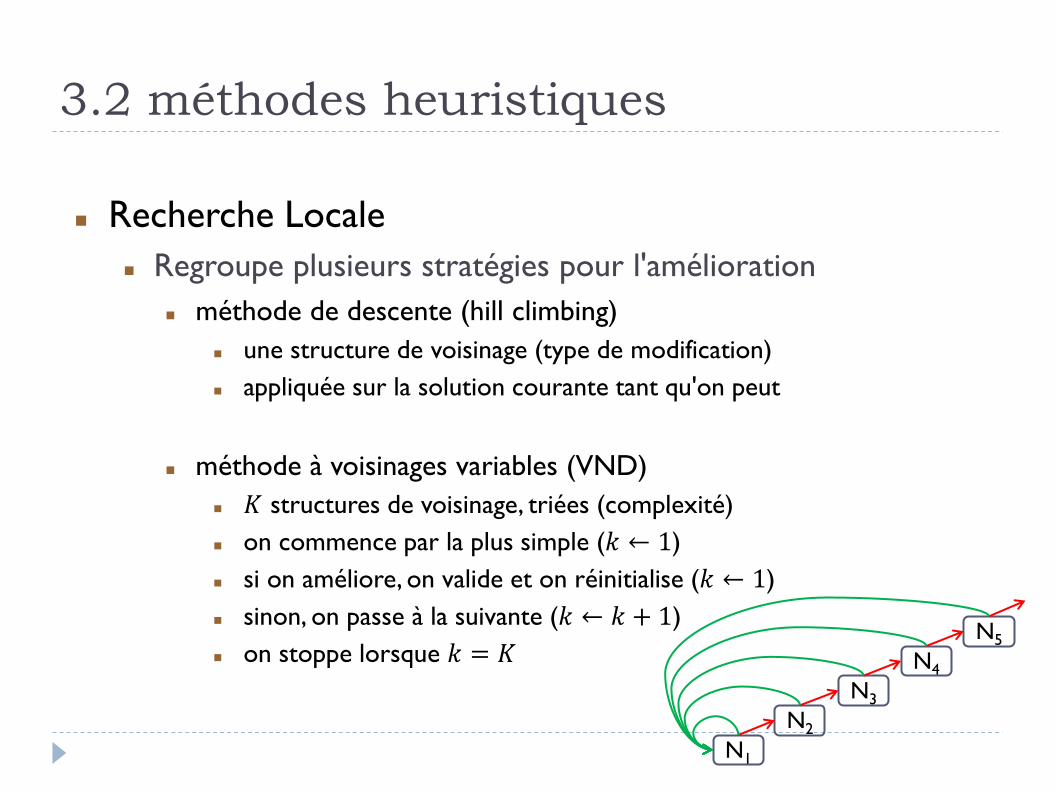
Recherche Locale
Regroupe plusieurs stratégies pour l'amélioration
méthode de descente (hill climbing)
une structure de voisinage (type de modification)
appliquée sur la solution courante tant qu'on peut
méthode à voisinages variables (VND)
𝐾 structures de voisinage, triées (complexité)
on commence par la plus simple (𝑘 ← 1)
si on améliore, on valide et on réinitialise (𝑘 ← 1)
sinon, on passe à la suivante (𝑘 ← 𝑘 + 1)
on stoppe lorsque 𝑘 = 𝐾
N1
N2
N4
N5
N3
3.2 méthodes heuristiques
Métaheuristiques
Stratégies d'exploration de l'espace des solutions
Pallier les limites des recherches locales
blocage sur le premier optimum local
vision myope de l'espace des solutions
Deux grandes catégories
évolution de population : algorithme génétique, colonies de
fourmis, scatter search...
monosolution : recuit simulé, recherche tabou, GRASP, VNS...
Hybridations : combinaisons de métaheuristiques
3.2 méthodes heuristiques
Recuit simulé
Années 80 : Kirkpatrick, Gelatt & Vecci
Analogie avec la sidérurgie
gérer le refroidissement d'un alliage
si trop rapide → cristallisation
si apparition de cristaux → réchauffe
un paramètre : la température 𝑇
température initiale 𝑇0, paliers : 𝑇 ← 𝛼𝑇 toutes les 𝜏 itérations
choix d'un mouvement au hasard 𝑠 ∈ 𝑉 𝑠𝑜
si Δ = 𝑓 𝑠 − 𝑓 𝑠0 ≥ 0, proba d'accepter 𝑒−Δ 𝑇
3.2 méthodes heuristiques
Recherche Tabou
Années 80 : Glover, Hansen
Autoriser les voisins non améliorants
Mais risque de cyclage (revenir sur des solutions déjà visitées)
Introduction d'une liste tabou
stocke les 𝜏 dernières solutions visitées
on s’interdit de revenir dessus
mise à jour à chaque itération
Extensions : aspiration, intensification/diversification
3.2 méthodes heuristiques
GRASP
Années 90 : Feo & Resende
Rafinement de la technique du multistart
Multistart
on génère aléatoirement une solution (construction)
puis on l'améliore (recherche locale)
on fait ça 𝑘 fois
on garde la meilleure solution
GRASP
la génération est randomisée (glouton+aléatoire)
Extensions : path relinking, hybridations

3.2 méthodes heuristiques
VNS
Années 90 : Hansen & Mladenovic
Utilisation de plusieurs voisinages
Raisonnement géométrique
𝑘 structures de voisinages, triées (complexité)
on commence par la plus simple (𝑘 ← 1)
on prend un voisin dans le voisinage
on lui applique une recherche locale
si on améliore, on valide et 𝑘 ← 1
sinon, 𝑘 ← 𝑘 + 1 (stoppe lorsque 𝑘 = 𝐾)
Utilisation conjointe de VNS et VND
3.2 méthodes heuristiques
Algorithme génétique
Années 70 : Holland
Analogie avec la sélection naturelle
une population d'individus
un individu = un chromosome
encodage d'une solution (évaluation = fitness)
création de nouveaux individus
croisement, mutation
sélection de la nouvelle population
Clés : gestion de la diversité, hybridation (algorithmes
mémétiques)
3.2 méthodes heuristiques
Colonies de fourmis
Années 2000 : Dorigo
Analogie avec les fourmis
recherche coopérative de la nourriture
chaque fourmi construit une solution
utilise information locale (gloutonne)
utilise information globale (phéromone)
phéromone = support de communication
mise à jour de la phéromone en fonction des résultats
biais vers les bons éléments
4. Problèmes d'ordonnancement
Partie de Philippe Lacomme !
5. Problèmes de transport
Transport de biens / personnes
Composante essentielle de la société moderne
Charbon puis pétrole : essor du transport moderne
plus rapide : réduction des délais de transport
plus loin : accès à de nouveaux marchés, délocalisation
plus sûr : maîtrise des aléas
davantage : augmentation des quantités transportées
Massification des transports
5. Problèmes de transport
Environnement fortement concurrentiel
Mécanisme de bourse au transport
Répondre aux offres de transport
Offrir les meilleures prestations de transport
délais, coûts
Savoir rapidement si une offre est intéressante
augmentation du bénéfice
respect de la nouvelle demande
respect des demandes existantes
5. Problèmes de transport
Trois entités en jeu
Client : quantité, origine, destination, dates...
Véhicule : capacité, vitesse...
Réseau : urbain / routier, distances
Dimensions
Nombre de demandes, de véhicules
Prétraitement
Calcul du chemin entre chaque point
Réduction au sous-graphe des points
5. Problèmes de transport
Exemples de problématiques
Organiser des tournées de transport (ex : la Poste)
collecte, livraison, collecte + livraison
gestion de la flotte de véhicules
satisfaire tous les clients
Organiser des lignes régulières (ex : bus, train)
point d'arrêt, fréquence
gestion de la flotte de véhicules
satisfaire le plus de clients possible
5. Problèmes de transport
Problèmes de transport en Aide à la Décision
Des problèmes simples
Plus court chemin
Problème de transport
Flot maximal, flot de coût minimal
Aux problèmes difficiles
Voyageur de commerce
Tournées de véhicules
Transport à la demande
5. Problèmes de transport
Problème de Plus Court Chemin (PCC)
soit un graphe 𝐺 = 𝑆, 𝐴 muni de coût sur les arcs, trouver
le plus court chemin d'un sommet origine 𝑜 à un sommet
destination 𝑑
coût positifs : Dijsktra, Bellman
coût négatifs (sans cycle) : Bellman
problème polynômial
sous-problème de nombreux problèmes de transport
5. Problèmes de transport
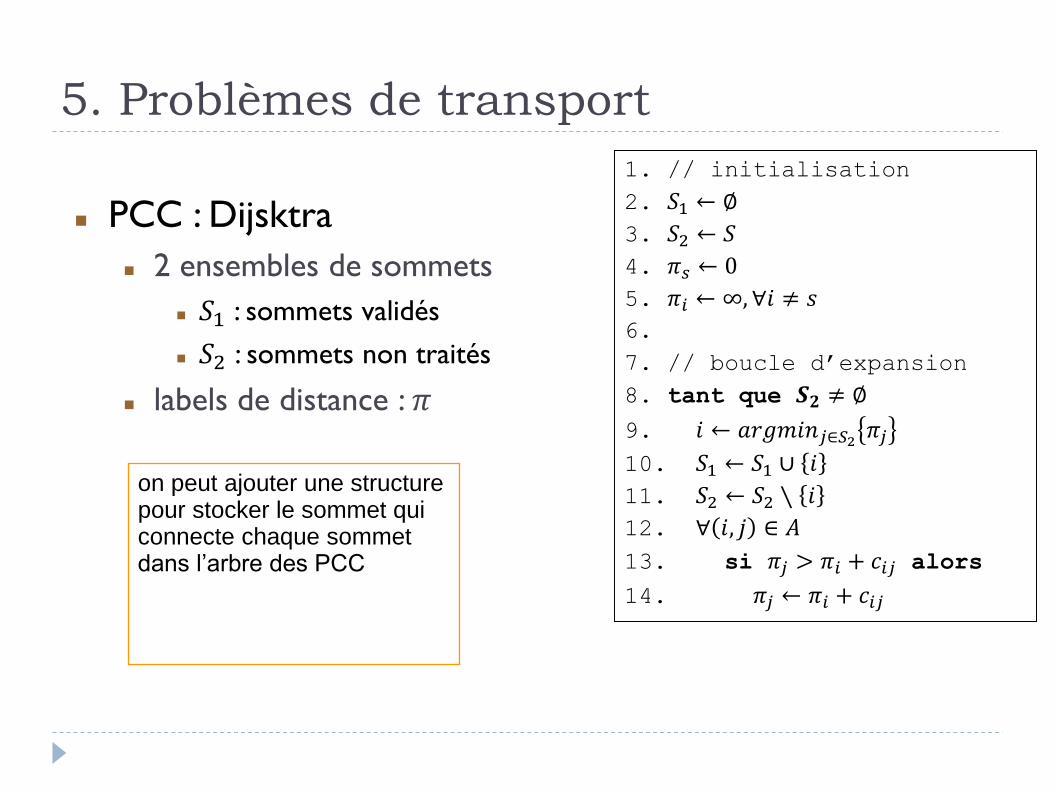
PCC : Dijsktra
2 ensembles de sommets
𝑆1 : sommets validés
𝑆2 : sommets non traités
labels de distance : 𝜋
1. // initialisation
2. 𝑆1 ← ∅
3. 𝑆2 ← 𝑆
4. 𝜋𝑠 ← 0
5. 𝜋𝑖 ← ∞,∀𝑖 ≠ 𝑠
6.
7. // boucle d’expansion
8. tant que 𝑺𝟐 ≠ ∅
9. 𝑖 ← 𝑎𝑟𝑔𝑚𝑖𝑛𝑗∈𝑆2 𝜋𝑗
10. 𝑆1 ← 𝑆1 ∪ 𝑖
11. 𝑆2 ← 𝑆2 ∖ 𝑖
12. ∀ 𝑖, 𝑗 ∈ 𝐴
13. si 𝜋𝑗 > 𝜋𝑖 + 𝑐𝑖𝑗 alors
14. 𝜋𝑗 ← 𝜋𝑖 + 𝑐𝑖𝑗
on peut ajouter une structure pour stocker le sommet qui connecte chaque sommet dans l’arbre des PCC
5. Problèmes de transport
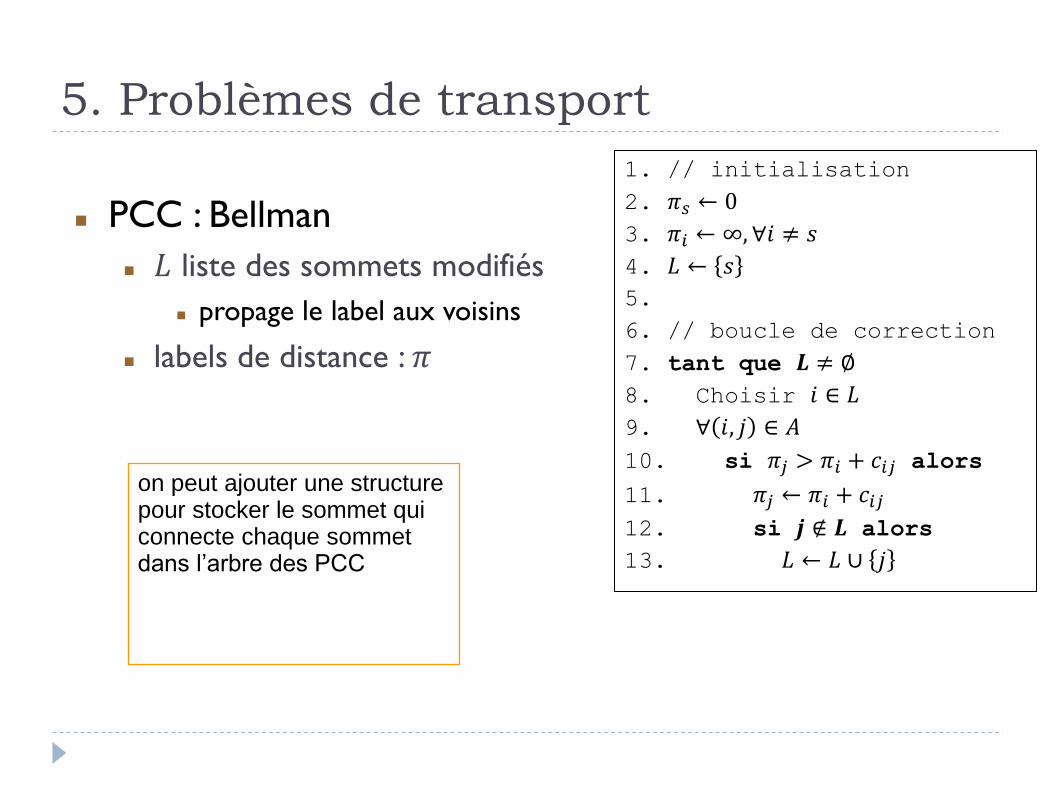
PCC : Bellman
𝐿 liste des sommets modifiés
propage le label aux voisins
labels de distance : 𝜋
on peut ajouter une structure pour stocker le sommet qui connecte chaque sommet dans l’arbre des PCC
1. // initialisation
2. 𝜋𝑠 ← 0
3. 𝜋𝑖 ← ∞,∀𝑖 ≠ 𝑠
4. 𝐿 ← 𝑠
5.
6. // boucle de correction
7. tant que 𝑳 ≠ ∅
8. Choisir 𝑖 ∈ 𝐿
9. ∀ 𝑖, 𝑗 ∈ 𝐴
10. si 𝜋𝑗 > 𝜋𝑖 + 𝑐𝑖𝑗 alors
11. 𝜋𝑗 ← 𝜋𝑖 + 𝑐𝑖𝑗
12. si 𝒋 ∉ 𝑳 alors
13. 𝐿 ← 𝐿 ∪ 𝑗
5. Problèmes de transport
Présence de cycle négatif : pas d'optimalité
rechercher un PCC élémentaire
NP-difficile
Méthodes exactes
Programme linéaires en nombres entiers
Programmation dynamique
5. Problèmes de transport
Problème de Transport
soit un graphe biparti 𝐺 = 𝑆1, 𝑆2, 𝐴 muni de quantités sur
les sommets et de coûts unitaires sur les arcs, trouver le flot
de coût minimal permettant de router les entités de 𝑆1 (producteurs) vers 𝑆2 (consommateurs)
stocks = demandes, sinon on ajoute un élément fictif (p/c)
problème polynomial
solutions initiales : coin nord-ouest, Balas-Hammer
optimisation : stepping stone ou programmation linéaire
5. Problèmes de transport
Problème de Flot Maximal
soit un graphe 𝐺 = 𝑆, 𝐴 muni de capacités sur les arcs,
trouver le flot maximal d'un sommet origine 𝑜 à un sommet
destination 𝑑
problème polynomial
algorithme de Ford-Fulkerson
algorithme de push-relabel
5. Problèmes de transport
Problème de Flot de Coût Minimal
soit un graphe 𝐺 = 𝑆, 𝐴 muni de capacités et de coûts
unitaires sur les arcs, trouver le flot de coût minimal routant
𝑞 unités d'un sommet origine 𝑜 à un sommet destination 𝑑
problème polynomial
algorithme de suppression de cycle négatif
algorithme de plus courts chemins successifs
5. Problèmes de transport
Problème du Voyageur de Commerce (TSP)
soit un graphe 𝐺 = 𝑆, 𝐴 muni de coûts sur les arcs, trouver
un cycle hamiltonien de coût minimal
problème NP-complet
méthodes exactes
programmation linéaire en nombres entiers, coupes
méthodes approchées
heuristiques, métaheuristiques
Un des problèmes phares de la RO
Presque toutes les méthodes exactes et approchées ont été
testées dessus
Permet donc de connaître le potentiel d'une nouvelle
méthodes
Intérêt multiple
industriel : au coeur de presque toutes les problèmatiques de
transport
académique : un des problèmes complexes les plus simples
ludique : simple à comprendre / visualiser
5. Problèmes de transport
Exemple
Concours dans les années 50 : trouver le plus court cycle
passant par la capitale des 48 états + Washington (hors Alaska
et Hawai)
Solution fournie en 1954 par Dantzig, Fulkerson et Johnson
Modèle linéaire, relaxation, coupes, branch&bound
5. Problèmes de transport
Présence de nombreuses variantes
sur les distances
euclidiennes ou non
normes 𝐿1, 𝐿2, 𝐿∞
symétrique, asymétrique
complet ou non
sur les contraintes
interdiction de certains virages
précédence entre certains noeuds
5. Problèmes de transport
5. Problèmes de transport
Problème de Tournées de Véhicules (VRP)
Soit un graphe 𝐺 = 𝑆, 𝐴 muni de coûts sur les arcs, où le
sommet 0 représente le dépôt et les sommets 1. . 𝑛 les clients.
Chaque client possède une demande 𝑞𝑖 > 0 à traiter par une
flotte de véhicules identiques de capacité 𝑄. On souhaite
desservir les clients en minimisant le nombre de véhicules et, de
manière secondaire, le coût.
Problème NP-difficile
Généralisation du TSP
5. Problèmes de transport
De (très) nombreuses variantes
Problème central en logistique
Fenêtres de temps (date d’ouverture / fermeture)
Livraison / collecte
Gestion explicite de l’espace de stockage
Possibilité de livrer un client par plusieurs véhicules
Flotte hétérogène
Multi-dépôts
Livraison sélective
5. Problèmes de transport
Problème de Transport à la Demande (PDP)
Soit un graphe 𝐺 = 𝑆, 𝐴 muni de coûts sur les arcs, où le
sommet 0 représente le dépôt et les sommets 1. . 𝑛 les clients.
Un ensemble 𝑜𝑖 , 𝑑𝑖 , 𝑞𝑖 , 𝑖 = 1…𝑟 de requêtes de transport
doit être traité par une flotte homogène de capacité 𝑄. Chaque
requête est un triplet origine, destination, quantité. On souhaite
traiter les requêtes en minimisant le nombre de véhicules et, de
manière secondaire, le coût.
Problème NP-complet
Généralisation du VRP
5. Problèmes de transport
Globalement, mêmes variantes que pour le VRP
Le VRP modélise un transport organisé par le dépôt
Livraison depuis un dépôt logistique
Collecte (logistique inverse, retraitement)
Le PDP modélise un transport point-à-point
Déménagements
Bourse de transport
5.1 Le VRP
Données
Graphe 𝐺 = 𝑆, 𝐴 , dépôt 0, clients 1…𝑛, demande 𝑞𝑖, coût 𝑐𝑖𝑗 , véhicules de capacité 𝑄
Contraintes
Chaque client doit être desservi, en une seule fois
Chaque véhicule débute et termine sa tournée au dépôt
Sa capacité doit être respectée
Objectifs
Minimiser le nombre de véhicules (primaire)
Minimiser le coût total (secondaire)
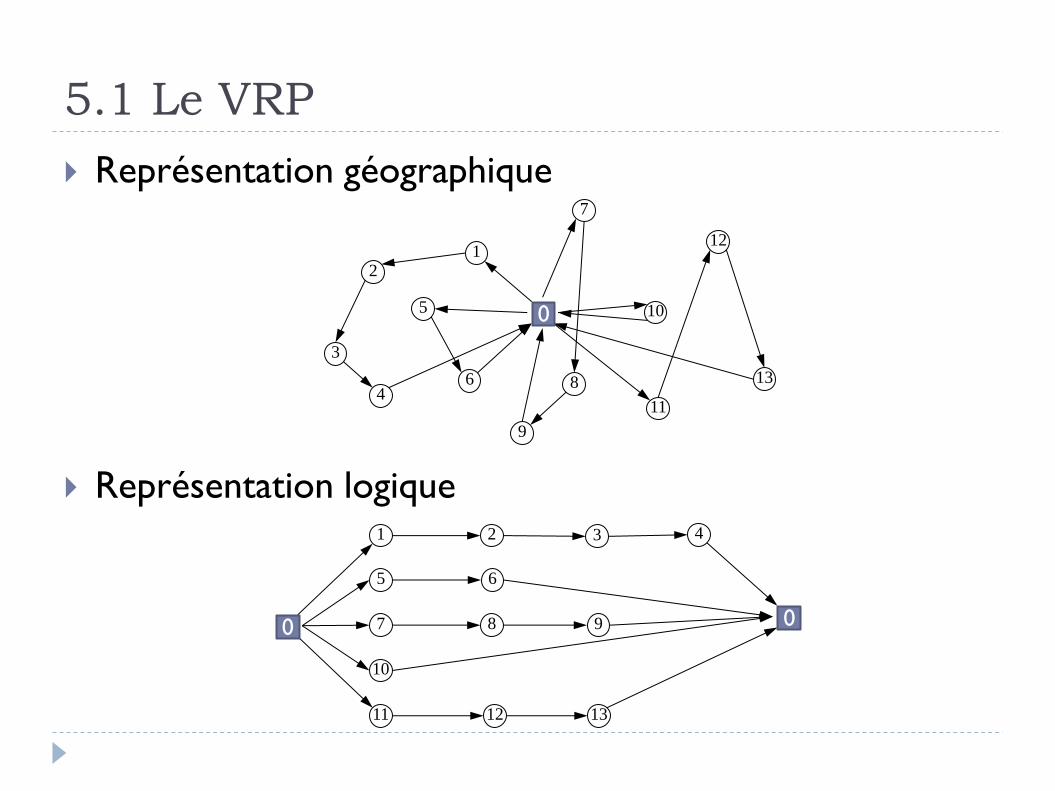
5.1 Le VRP
Représentation géographique
Représentation logique
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2 3 4
5 6
7 9 8
10
11 12 13
0 0
5.1 Le VRP
Structures de données
Représentation du graphe
Vecteur de sommets
Vecteur d’arcs
Listes d’adjacence
Représentation d’une solution
Vecteur indexé sur les clients (indique le prochain arc)
Vecteur indexé sur les véhicules (indique le premier arc)
Éventuellement
Vecteur indexé sur les véhicules (indique le dernier arc)
Vecteur indexé sur les clients (charge en quittant le sommet)
Vecteur indexé sur les clients (numéro de tournée associée)
5.1 Le VRP
Heuristiques constructives Création de tournées valides (dépôt – {clients} – dépôt)
Respect à chaque itération de la capacité
Choix des arcs de faible coût
Principes généraux Séquentiel / parallèle : toutes les routes sont actives ou non
Clustering : regrouper un sous-ensemble de clients
Routing : ordonner un sous-ensemble de clients
Stratégie « cluster || route »
Stratégie « cluster first – route second »
Stratégie « route first – cluster second »
5.1 Le VRP
Heuristiques « classiques »
Savings (Clarke & Wright 64)
Construire des tournées élémentaires puis les fusionner
Insertion (Solomon 87), « cluster || route »
Ouvrir une nouvelle tournée puis insérer des clients tant que possible
Sweep (Gillett & Miller, 74), « cluster || route »
Balayage radial pour les clients, sinon ≈ insertion
Fisher & Jaikumar (81), « cluster first – route second »
Affectation généralisée pour le clustering, puis un TSP par route
Split (Beasley 83), « route first – cluster second »
TSP puis découpage optimal par algorithme Split
5.1 Le VRP
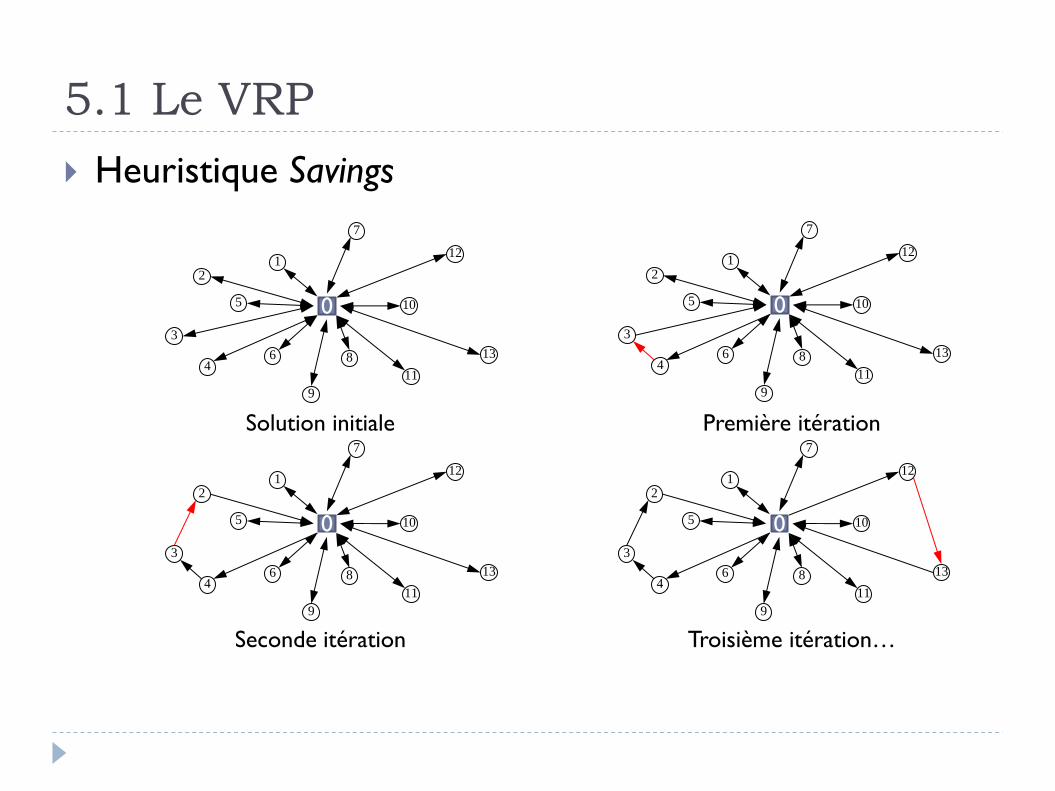
Heuristique Savings
On crée initialement une tournée par client
À chaque itération
On considère la possibilité de concaténer deux tournées
Pour tout couple de tournées 0,… , 𝑖, 0 et 0, 𝑗, … , 0
Vérifier le respect de la capacité
Vérifier le gain en distance : 𝜇𝑖𝑗 = 𝑐𝑖0 + 𝑐0𝑗 − 𝑐𝑖𝑗 > 0
Choisir une fusion améliorante
Soit la première trouvée
Soit la meilleure trouvée
Astuce
trier les arcs selon le gain décroissant
évaluer les possibilités de fusion dans cet ordre
5.1 Le VRP
Heuristique Savings
Solution initiale Première itération
Seconde itération Troisième itération…
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2
3
4
5
6
7
9
8
10
11
12
13
0
5.1 Le VRP
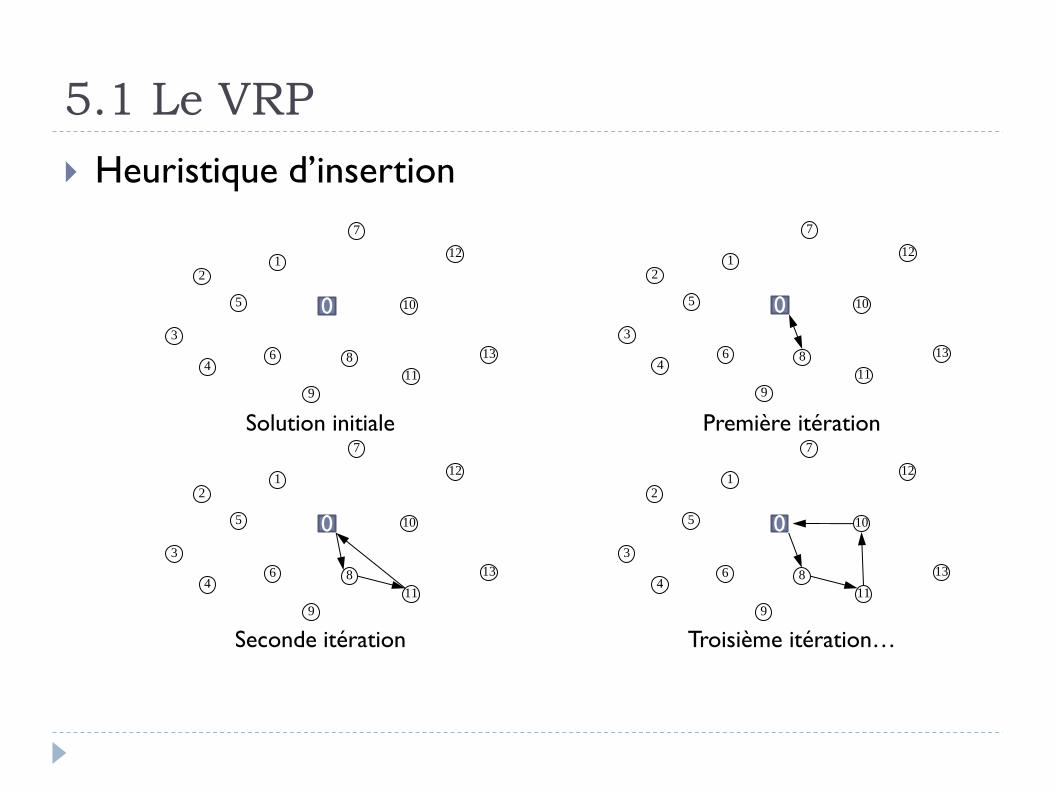
Heuristique d’insertion
On crée les tournées une à une
Pour chaque tournée
On commence par la tournée vide
Parmi les clients non traités, on recherche celui dont l’insertion en fin
Respecte la contrainte de capacité
Augmente le moins la distance
S’il existe, on l’insère, sinon on crée une nouvelle tournée
Nombreuses variantes
Considérer un ordre sur les clients
Considérer les insertions en fin ou n’importe où dans la tournée
Considérer les insertions dans la tournée courante ou dans toutes
5.1 Le VRP
Heuristique d’insertion
Solution initiale Première itération
Seconde itération Troisième itération…
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2
3
4
5
6
7
9
8
10
11
12
13
0
1 2
3
4
5
6
7
9
8
10
11
12
13
0
5.1 Le VRP
Structures de voisinage
Mouvement de type 𝑘 − Opt
Défini à la base pour le TSP
Consiste à retirer 𝑘 arcs et à en insérer 𝑘 autres
𝑘-optimalité : il n’existe aucun mouvement 𝑘 − Opt améliorant
Complexité d’évaluer un voisinage 𝑘 − Opt
Nombre de voisins = 𝑂 𝑛𝑘
Évaluer un voisin = 𝑂 1
Complexité finale = 𝑂 𝑛𝑘
En pratique, on se limite à 𝑘 ≤ 4 (et encore, sur des cas particuliers)
5.1 Le VRP
Structures de voisinage
Le mouvement 2-Opt
Remplacer 2 arcs par 2 autres
2 variantes, selon qu’ils appartiennent à la même tournée ou pas
2-Opt interne = renverser une partie de la tournée
Test de capacité inutile
Inutile de considérer 2 arcs successifs
Cas particulier, le swap
Illustration (général et swap)
5.1 Le VRP
Structures de voisinage
Le mouvement 2-Opt
2-Opt externe = échanger deux fins de tournée
Tests de capacité nécessaires
Inutile de considérer simultanément les arcs initiaux ou finaux
Possibilité de supprimer une tournée
Illustration (général et suppression tournée)
5.1 Le VRP
Structures de voisinages
Voisinages de type 3-Opt
Remplacer 3 arcs par 3 autres
Davantage de variantes
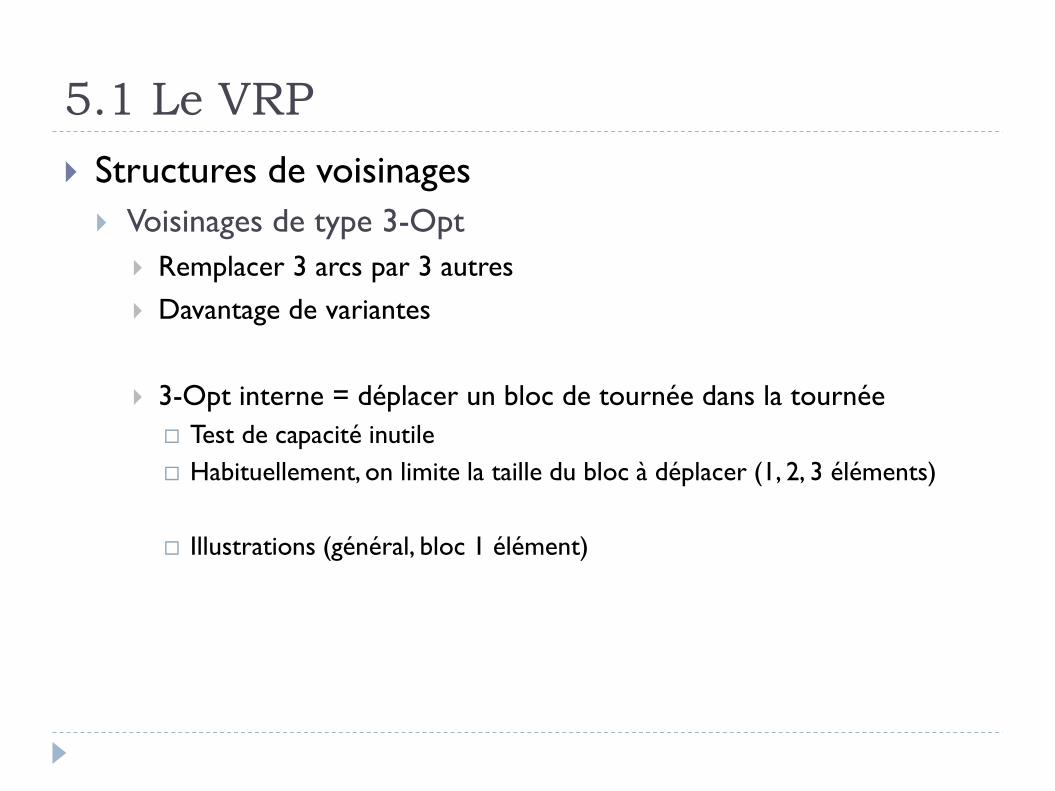
3-Opt interne = déplacer un bloc de tournée dans la tournée
Test de capacité inutile
Habituellement, on limite la taille du bloc à déplacer (1, 2, 3 éléments)
Illustrations (général, bloc 1 élément)
5.1 Le VRP
Structures de voisinages
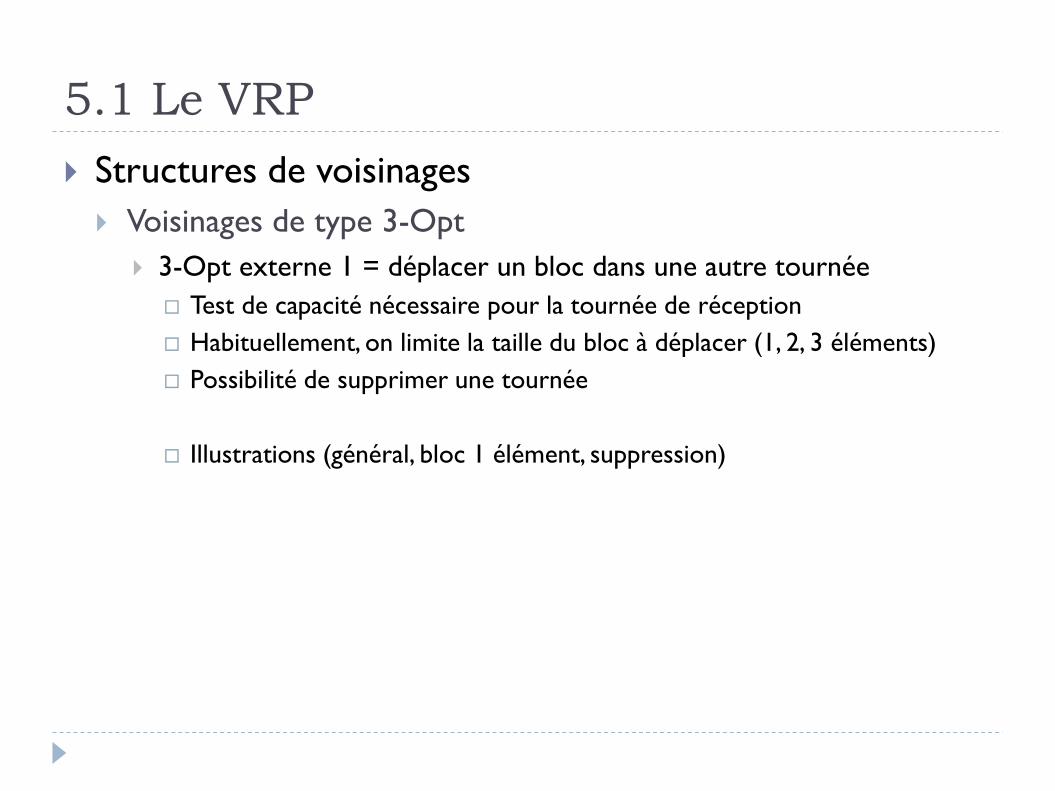
Voisinages de type 3-Opt
3-Opt externe 1 = déplacer un bloc dans une autre tournée
Test de capacité nécessaire pour la tournée de réception
Habituellement, on limite la taille du bloc à déplacer (1, 2, 3 éléments)
Possibilité de supprimer une tournée
Illustrations (général, bloc 1 élément, suppression)
5.1 Le VRP
Structures de voisinages
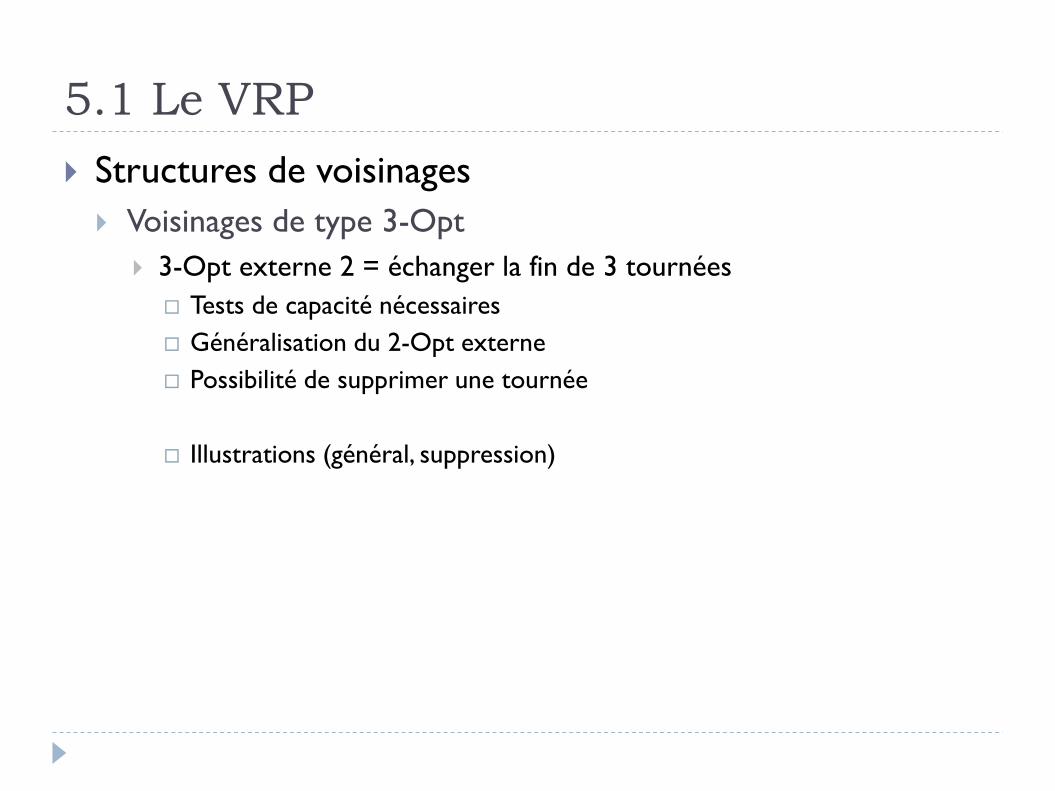
Voisinages de type 3-Opt
3-Opt externe 2 = échanger la fin de 3 tournées
Tests de capacité nécessaires
Généralisation du 2-Opt externe
Possibilité de supprimer une tournée
Illustrations (général, suppression)
5.1 Le VRPTW
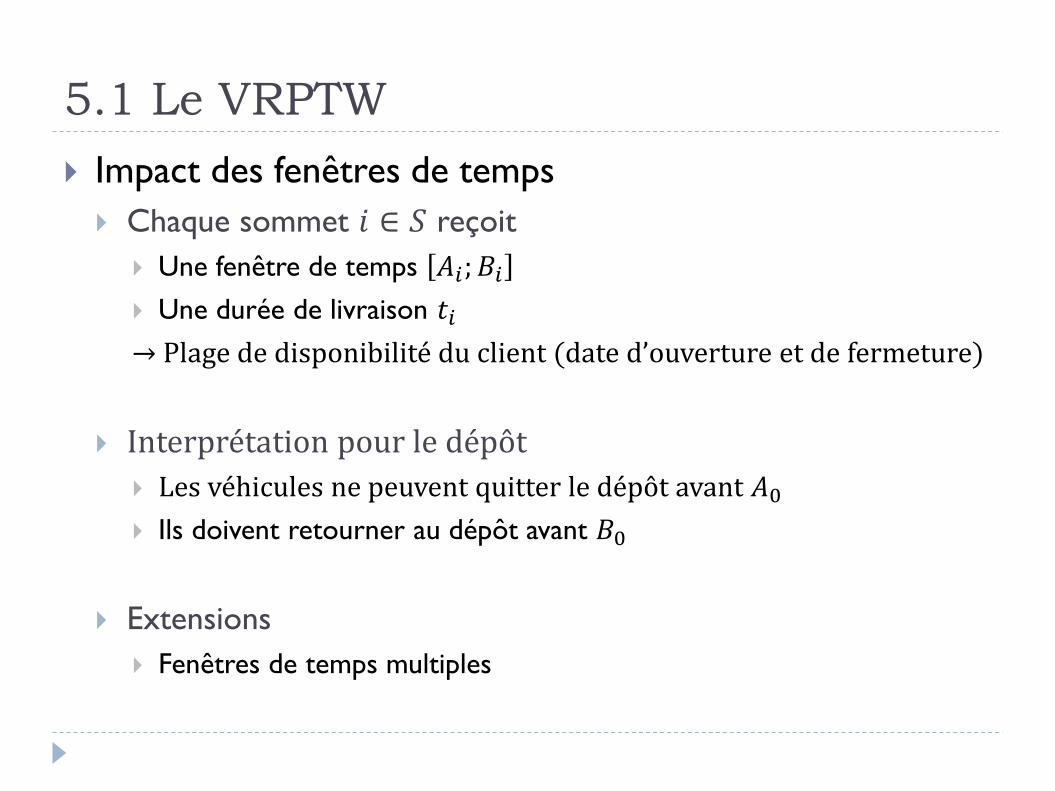
Impact des fenêtres de temps
Chaque sommet 𝑖 ∈ 𝑆 reçoit
Une fenêtre de temps 𝐴𝑖; 𝐵𝑖
Une durée de livraison 𝑡𝑖
→ Plage de disponibilité du client (date d’ouverture et de fermeture)
Interprétation pour le dépôt
Les véhicules ne peuvent quitter le dépôt avant 𝐴0
Ils doivent retourner au dépôt avant 𝐵0
Extensions
Fenêtres de temps multiples
5.1 Le VRPTW
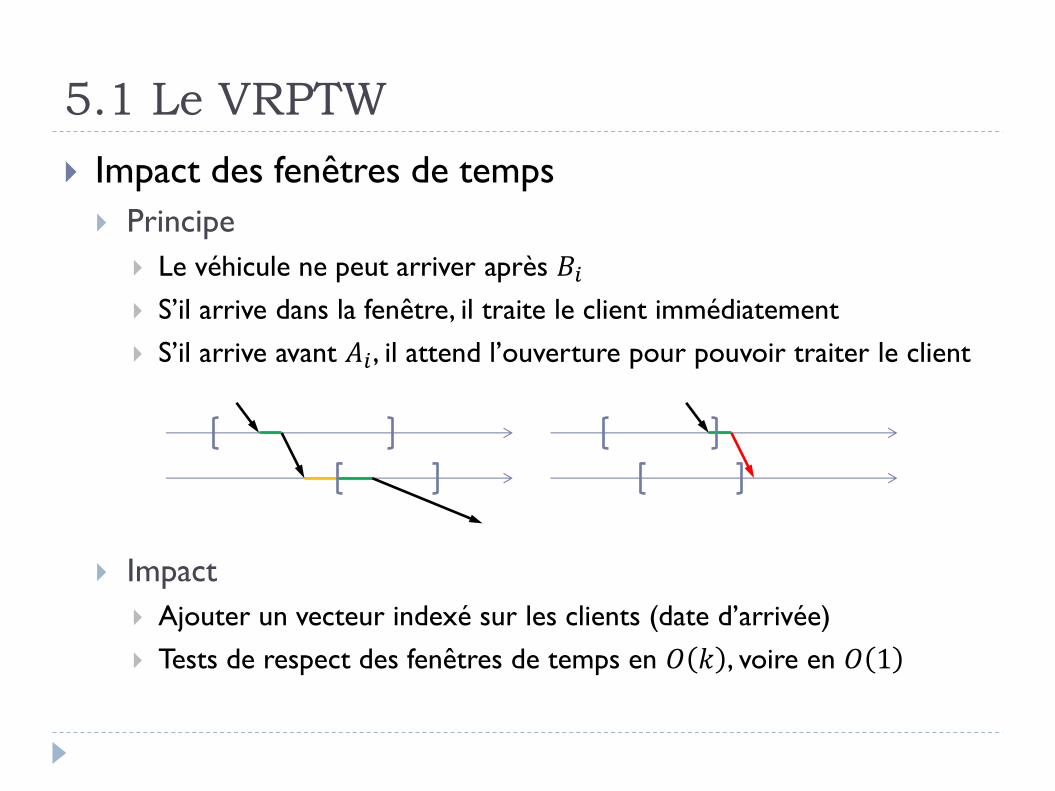
Impact des fenêtres de temps
Principe
Le véhicule ne peut arriver après 𝐵𝑖
S’il arrive dans la fenêtre, il traite le client immédiatement
S’il arrive avant 𝐴𝑖, il attend l’ouverture pour pouvoir traiter le client
Impact
Ajouter un vecteur indexé sur les clients (date d’arrivée)
Tests de respect des fenêtres de temps en 𝑂 𝑘 , voire en 𝑂 1