Embed Size (px)
Citation preview
Université du Québec à Chicoutimi
MODULE D’INGENIERIE PROGRAMME DE GENIE ELECTRIQUE
6GIN555 – PROJET DE SYNTHESE D’INGENIERIE
Rapport final
Gestion de l’énergie électrique sur système éolien
Préparé par
TREMBLAY, FREDERIC BOUCHARD, CHRISTIAN
POIRIER, JONATHAN
Pour
FOFANA, ISSOUF
UNIVERSITÉ DU QUÉBEC À CHICOUTIMI
16 avril 2010
COORDONATEUR : PARADIS, JACQUES CONSEILLER : FOFANA, ISSOUF
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | ii
RESUME
Dans les régions nordiques éloignées, la production d’énergie se fait, dans plusieurs cas, aux dépens de
l’environnement. L’utilisation de génératrices à combustion est le système le plus simple à utiliser pour
alimenter des chalets, par exemple. Un système complémentaire diminuerait les coûts d’entretien, la pollution
générée ainsi que la nuisance sonore causée par le moteur à combustion. L’utilisation d’un système éolien
devient une approche de plus en plus intéressante avec tout le développement et la recherche de système éolien
performant.
Ce projet de conception, subventionné par les entreprises LP, consiste à concevoir un prototype utilisant
une éolienne, un système d’accumulation et une génératrice diesel pouvant fournir une puissance constante à
une petite charge, comme un chalet en territoire éloigné, à une tension nominale de 120Vc.a.. Il s’agit donc de
présenter un système fiable, efficace et le plus économique possible. En d’autres mots, le système de
génération d’énergie électrique autonome sera remplacé par une génératrice à combustion en l’absence de vent
et d’énergie sur le système d’accumulation. Le système doit comprendre une régulation de la vitesse de
rotation de l’aérogénérateur, un système d’acquisition afin de vérifier le comportement du système sur une
longue période, un boîtier de commande dans le but de freiner l’aérogénérateur manuellement dans une
situation d’urgence ou lors de manœuvres d’entretien. Finalement, un simulateur reproduisant les valeurs
mesurées par le système d’acquisition a dû être conçu pour fin de vérification et d’étalonnage du contrôleur.
Une étude comportementale implémentée sur le logiciel SimPower Systems a été réalisée afin de cerner les
différents enjeux auxquels le projet devait faire face. Suite à cette étape, le dimensionnement des composantes
électroniques, la conception et la programmation des instruments de mesures (voltmètre, ampèremètre,
fréquencemètre et la mesure de la vitesse du vent), la programmation de l’affichage ACL, la logique de
programmation, l’interface d’acquisition et le simulateur ont été développés.
La finalité de ce projet présente une lecture des valeurs précise au centième, précision amplement suffisante
pour l’acquisition à long terme et pour les prises de décision du microcontrôleur. Les essais finaux faits en
laboratoire présentent les comportements anticipés par l’étude du système sur MATLAB : Simulink. Le
freinage avec résistance est efficace, ne perturbe pas la charge à alimenter tout en évitant l’entretien fréquent
de l’éolienne. Le système de contrôle, de type évolutif, permettra d’ajouter des équipements dans le futur
(sorties disponibles). Le développement de cette gestion de l’énergie sur un système éolien fut réalisé à faible
coût.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | iii
TABLE DES MATIERES 1 Introduction .................................................................................................................................................... 1
2 Présentation du projet ..................................................................................................................................... 2
2.1 Description de l’entreprise ...................................................................................................................... 2
2.2 Description de l’équipe du travail .......................................................................................................... 2
2.3 Problématique et état de l’art reliés au projet ......................................................................................... 2
2.3.1 Aérogénérateur ............................................................................................................................... 3
2.3.2 Électronique de puissance .............................................................................................................. 5
2.3.3 Électronique .................................................................................................................................... 6
2.3.4 Dimensionnement des conducteurs et des protections ................................................................... 7
2.4 Objectifs généraux et spécifiques du projet ............................................................................................ 7
3 Aspects techniques et éléments de conception relatifs au projet .................................................................... 8
3.1 Aspects techniques ................................................................................................................................. 9
3.1.1 Présentation des composantes principales ...................................................................................... 9
3.1.2 Principes d’asservissement proposés ............................................................................................ 13
3.1.3 Résistance de freinage à grande puissance ................................................................................... 15
3.1.4 Essais de l’alternateur en laboratoire ............................................................................................ 16
3.1.5 Analyse comportementale à l’aide du simulateur MATLAB ....................................................... 18
3.2.1 Développement du programme du dsPIC ..................................................................................... 29
3.3 Éléments de conception ........................................................................................................................ 30
3.3.1 Schématique de câblage, unifilaire et schéma de disposition ....................................................... 30
3.3.2 Dimensionnement des composantes physiques ............................................................................ 30
3.3.3 Conception et programmation des différents appareils de mesure ............................................... 40
3.3.4 Logique de contrôle ...................................................................................................................... 53
3.3.5 Conception et programmation de l’affichage à cristaux liquides ................................................. 55
3.3.6 Conception et programmation du simulateur de vérification du contrôleur ................................. 57
3.3.7 Interface d’acquisition et de simulation ........................................................................................ 64
4 Bilan des activités ......................................................................................................................................... 67
4.1 Arrimage formation pratique/universitaire ........................................................................................... 67
4.2 Travail d’équipe .................................................................................................................................... 67
4.3 Respect de l’échéancier ........................................................................................................................ 69
4.4 Analyse et discussion ............................................................................................................................ 70
5 Conclusion et recommandations ................................................................................................................... 73
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | iv
6 Bibliographie ................................................................................................................................................ 74
6.1 Monographies ....................................................................................................................................... 74
6.2 Notes de cours ...................................................................................................................................... 74
6.3 Chapitres de livre .................................................................................................................................. 74
6.4 Sites web ............................................................................................................................................... 75
Annexe A ............................................................................................................................................................. 76
Annexe B ............................................................................................................................................................. 79
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | v
LISTE DES FIGURES
Figure 1: Circuit de base d'un redresseur triphasé à diodes ................................................................................... 5 Figure 2 : Circuit de base d'un hacheur série ......................................................................................................... 5 Figure 3: Comportement d’un hacheur série ......................................................................................................... 5 Figure 4 : Circuit de base d'un hacheur série ......................................................................................................... 5 Figure 5: Schéma typique d'une alimentation à découpage en mode dévolteur. ................................................... 6 Figure 6: Schéma d'un amplificateur soustracteur ................................................................................................. 6 Figure 7 : Schéma d'un amplificateur suiveur ....................................................................................................... 6 Figure 8: Puissance générée de l'éolienne selon la vitesse des vents .................................................................. 10 Figure 9: Installation de l'éolienne (9 octobre 2009) ........................................................................................... 14 Figure 10: Tension délivrée de l'alternateur en fonction de sa vitesse de rotation .............................................. 16 Figure 11 : Tension délivrée en fonction de la charge demandée ....................................................................... 16 Figure 12: Fréquence de la tension délivrée en fonction de la vitesse d'entraînement ........................................ 17 Figure 13 : Vue d'ensemble du simulateur «Simulink» ....................................................................................... 18 Figure 14: Programmation de l'aérogénérateur ................................................................................................... 19 Figure 15: Programmation du pont de diodes ..................................................................................................... 20 Figure 16 : Schématique de branchement des batteries ....................................................................................... 21 Figure 17: Programmation des batteries .............................................................................................................. 21 Figure 18: Programmation de la charge de secours ............................................................................................. 21 Figure 19: Programmation du MOSFET ............................................................................................................. 22 Figure 20 : Programmation de la charge de secours ............................................................................................ 22 Figure 21: Exemple de programmation du rapport cyclique ............................................................................... 22 Figure 22: Programmation des charges fictives .................................................................................................. 23 Figure 23 : Programmation du temps d'activation des charges ........................................................................... 23 Figure 24: Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.1-1000W) .................................. 24 Figure 25 : Courants circulant dans le système (conditions 4.5.3.1-1000W) ...................................................... 24 Figure 26 : Courant circulant dans la charge (conditions 4.5.3.1-1000W).......................................................... 24 Figure 27 : Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.1-2000W) ................................. 25 Figure 28 : Courants circulant dans le système (conditions 4.5.3.1-2000W) ...................................................... 25 Figure 29 : Courant circulant dans la charge (conditions 4.5.3.1-2000W).......................................................... 25 Figure 30: Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.2) ............................................... 26 Figure 31 : Courants circulant dans le système (conditions 4.5.3.2) ................................................................... 26 Figure 32 : Courant circulant dans la charge (conditions 4.5.3.2) ....................................................................... 26 Figure 33 : Tension d'une batterie (conditions 4.5.3.2) ....................................................................................... 27 Figure 34 : Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.3) .............................................. 27 Figure 35 : Rapport cyclique du MLI (conditions 4.5.3.3) .................................................................................. 28 Figure 36 : Courant moyen circulant dans la charge de secours (conditions 4.5.3.3) ......................................... 28 Figure 37 : Puissance moyenne dissipée dans la charge de secours (conditions 4.5.3.3) ................................... 28 Figure 38 : Plaquette de développement ............................................................................................................. 29 Figure 39 : Schéma de fonctionnement de la protection ..................................................................................... 32 Figure 40: Schématique et physique du MOSFET de puissance ......................................................................... 33 Figure 41: Montage pour le dimensionnement de la diode de roue libre ............................................................ 34 Figure 42:Comportement du circuit de la charge de secours .............................................................................. 34 Figure 43: Schématique et physique du redresseur triphasé à diodes ................................................................. 35
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | vi
Figure 44:Puissance dissipe du redresseur en fonction du courant ..................................................................... 36 Figure 45: Température tolérée du redresseur en fonction du courant traversé .................................................. 36 Figure 46: Choix du dissipateur de chaleur ......................................................................................................... 36 Figure 47 : Régulateur de tension 48V- 12V ....................................................................................................... 38 Figure 48 : Système d'alimentation complet ....................................................................................................... 39 Figure 48: Schématique des possibilités de configuration d’entrée/sortie du contrôleur .................................... 40 Figure 50 Schéma de câblage du microcontrôleur .............................................................................................. 41 Figure 51 : Intégration de l'oscillateur système ................................................................................................... 42 Figure 51 : Schéma de câblage de l’anémomètre ................................................................................................ 44 Figure 52: Démonstration du fonctionnement de la détection ............................................................................ 44 Figure 54 : Schéma de câblage du fréquencemètre ............................................................................................. 45 Figure 55: Démonstration du fonctionnement de la détection de la vitesse de rotation du rotor de l’alternateur
.................................................................................................................................................................................. 46 Figure 56 : Courant mesuré versus tension contrôleur avant conversion ............................................................ 46 Figure 57: Courant mesuré versus tension contrôleur après conversion ............................................................. 47 Figure 58: Circuit de conversion de la tension du senseur de courant ................................................................ 48 Figure 59 : Schéma de câblage du circuit adaptateur .......................................................................................... 48 Figure 60 : Tension mesurée sur le pont versus tension contrôleur .................................................................... 49 Figure 61: Schéma de câblage du voltmètre ........................................................................................................ 50 Figure 62 : Schéma pour l'activation d'un relais .................................................................................................. 51 Figure 61:Schéma de câblage du pilotage du MOSFET ..................................................................................... 52 Figure 62: Diagramme du comportement du MLI .............................................................................................. 53 Figure 63 : Logigramme du système global ........................................................................................................ 54 Figure 64: Affichage ACL .................................................................................................................................. 55 Figure 65 : Schéma de branchement du second microcontrôleur pour afficheur ACL ....................................... 56 Figure 66 : Schéma de branchement de l'afficheur ACL ainsi que l'inverseur de tension .................................. 56 Figure 67 : Schéma de câblage du microcontrôleur de simulation ...................................................................... 58 Figure 68 : Schémas de filtrage des sorties hacheurs du simulateur ................................................................... 61 Figure 69 : Schéma de connexion du convertisseur UART ................................................................................ 62 Figure 70: Fonctionnement du prototype ............................................................................................................ 72
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | vii
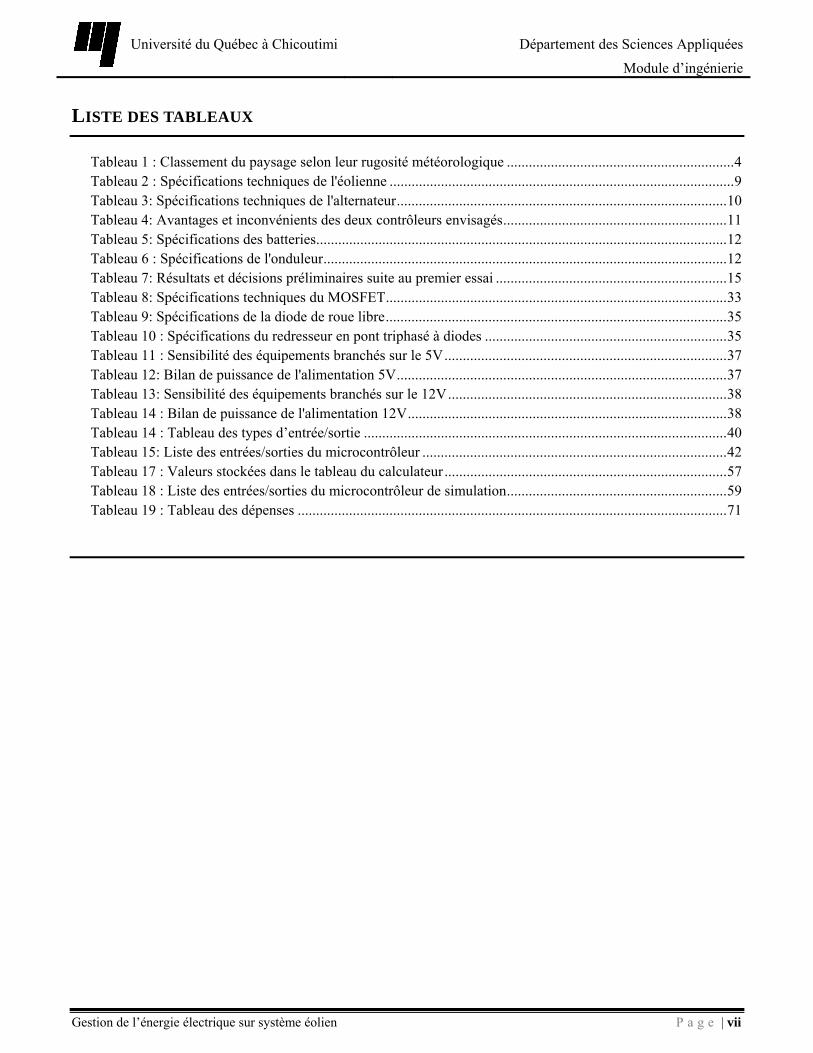
LISTE DES TABLEAUX
Tableau 1 : Classement du paysage selon leur rugosité météorologique .............................................................. 4 Tableau 2 : Spécifications techniques de l'éolienne .............................................................................................. 9 Tableau 3: Spécifications techniques de l'alternateur .......................................................................................... 10 Tableau 4: Avantages et inconvénients des deux contrôleurs envisagés ............................................................. 11 Tableau 5: Spécifications des batteries ................................................................................................................ 12 Tableau 6 : Spécifications de l'onduleur .............................................................................................................. 12 Tableau 7: Résultats et décisions préliminaires suite au premier essai ............................................................... 15 Tableau 8: Spécifications techniques du MOSFET ............................................................................................. 33 Tableau 9: Spécifications de la diode de roue libre ............................................................................................. 35 Tableau 10 : Spécifications du redresseur en pont triphasé à diodes .................................................................. 35 Tableau 11 : Sensibilité des équipements branchés sur le 5V ............................................................................. 37 Tableau 12: Bilan de puissance de l'alimentation 5V .......................................................................................... 37 Tableau 13: Sensibilité des équipements branchés sur le 12V ............................................................................ 38 Tableau 14 : Bilan de puissance de l'alimentation 12V ....................................................................................... 38 Tableau 14 : Tableau des types d’entrée/sortie ................................................................................................... 40 Tableau 15: Liste des entrées/sorties du microcontrôleur ................................................................................... 42 Tableau 17 : Valeurs stockées dans le tableau du calculateur ............................................................................. 57 Tableau 18 : Liste des entrées/sorties du microcontrôleur de simulation ............................................................ 59 Tableau 19 : Tableau des dépenses ..................................................................................................................... 71
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 1
1 INTRODUCTION
Dans les régions nordiques éloignées, la production d’énergie se fait, dans plusieurs cas, aux dépens de
l’environnement. L’utilisation de génératrices à combustion est le système le plus simple à utiliser pour
alimenter des chalets, par exemple. Étant donné que les génératrices entraînées par un moteur à combustion
demandent beaucoup d’entretien (réparations et remplissage de carburant) et polluent avec leur gaz
d’échappement, l’utilisation d’un système complémentaire diminuera ces coûts d’entretien, la pollution
générée ainsi que la nuisance sonore causée par le moteur. L’utilisation d’une éolienne devient une approche
de plus en plus intéressante avec tout le développement et la recherche de système éolien performant.
Ce projet de conception consiste à concevoir un prototype utilisant une éolienne, un système
d’accumulation et une génératrice diesel pouvant fournir une puissance à une petite charge, comme un chalet
en territoire éloigné, à une tension nominale de 120Vc.a..
Ce système à concevoir, subventionné par les entreprises LP, englobe différents domaines d’ingénierie
électrique soit, l’énergie, l’électronique de puissance, l’électronique ainsi que le traitement du signal. Ce
rapport présentera tout le cheminement et les stratégies afin d’obtenir un système fiable et efficace et le plus
économique possible.
Ce document présentera tout d’abord, un survol des principes techniques et des documents essentiels à la
bonne compréhension des phénomènes en jeu. Suivra ensuite la présentation des objectifs reliés à cette
synthèse d’ingénierie. Par la suite, la présentation des aspects techniques sera abordée. Elle comprend la
présentation des principales composantes soit l’aérogénérateur, le contrôleur, l’onduleur, les batteries,
l’analyse sur les essais effectués et l’analyse comportementale du système global à l’aide du logiciel
«Simulink». Ensuite, suivront les éléments de conception où le dimensionnement des composantes
électroniques, la conception et la programmation des instruments de mesures (voltmètre, ampèremètre,
fréquencemètre et la mesure de la vitesse du vent), la programmation de l’affichage ACL, la logique de
programmation, l’interface d’acquisition et le simulateur seront présentés. Une partie du rapport sera réservée
au bilan des activités afin de faire ressortir les compétences acquises dans le développement du projet,
d’illustrer l’échéancier et de présenter l’analyse des résultats obtenus. Finalement, un bilan des objectifs qui
ont été atteints ainsi que les recommandations nécessaires à un travail ultérieur seront traitées dans la
conclusion de ce document.
La finalité de ce projet présente une lecture des valeurs précise au centième, précision amplement suffisante
pour l’acquisition à long terme et pour les prises de décision du microcontrôleur. Les essais finaux faits en
laboratoire présentent les comportements anticipés par l’étude du système sur MATLAB : Simulink. Le
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 2
freinage avec résistance est efficace, ne perturbe pas la charge à alimenter tout en évitant l’entretien fréquent
de l’éolienne. Le système de contrôle, de type évolutif, permettra d’ajouter des équipements dans le futur
(sorties disponibles). Le développement de cette gestion de l’énergie sur un système éolien fut réalisé dans le
budget prédéfini de 2500$. En fait, un surplus de 330$ est toujours disponible pour modifications futures.
2 PRESENTATION DU PROJET
2.1 Description de l’entreprise
Les Entreprises L.P est une entreprise en grande partie forestière qui œuvre dans le domaine de la voirie.
Outre la forêt, celle-ci, étant entrepreneur général, se spécialise dans l’excavation, terrassement, aménagement
paysager chez le grand public. Étant donné que beaucoup de travaux dans des secteurs très éloignés, des camps
de travailleurs mobiles sont amenés sur les chantiers. L’essence étant rare et très chère, il est dans l’avantage
de la compagnie de créer sa propre énergie sur place pour alimenter les camps. De ce fait, un secteur de
recherche et développement s’est ajouté aux Entreprises L.P. Et de là est apparu le présent projet de
conception.
2.2 Description de l’équipe du travail
L’équipe de cette synthèse d’ingénierie est constituée de Jonathan Poirier, Christian Bouchard et Frédéric
Tremblay. Ce projet a été réalisé sous la supervision de M. Luc Poirier, propriétaire des entreprises LP et
promoteur du projet. Le travail et la conception ont été développés à l’aide de notre conseiller de l’Université
du Québec À Chicoutimi, M. Issouf Fofana.
2.3 Problématique et état de l’art reliés au projet
En général, ce projet utilise les concepts d’électronique de puissance pour effectuer la conception du
chargeur à batterie, du pilotage de la résistance de freinage et de l’interface entre le simulateur et le contrôleur
principal. De plus, les concepts techniques de filtrage seront utilisés pour réaliser les instruments de mesure
permettant le contrôle du système éolien. Il est à noter que ces choix technologiques seront expliqués plus loin
dans le document. Des normes sont également à vérifier en ce qui a trait au dimensionnement des câbles et de
l’installation de la protection. Finalement, les spécifications techniques et le manuel du contrôleur seront
importants afin de réaliser la programmation et la communication pour le système d’acquisition et pour le
simulateur. Avant tout, l’aérogénérateur doit être choisi selon les besoins et le budget, le point suivant présente
un aperçu des éléments à prendre en compte.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 3
2.3.1 Aérogénérateur
En premier lieu, une recherche bibliographique exhaustive a été abordée afin de saisir les concepts
fondamentaux de la génération d’énergie électrique à l’aide d’un aérogénérateur. Plusieurs documents ont été
utiles pour cette prise de conscience. Il est à souligner que la source d’informations la plus importante a été le
site «Techniques de l’ingénieur» où les documents suivants ont été recueillis :
La monographie «Wind power in power systems» de Wiley fut un ouvrage également intéressant dans cette
recherche. La somme de ces documents a permis de déceler que les éoliennes tripales ont un meilleur
rendement pour une vitesse de rotation plus faible. Il est compromis entre l’efficacité aérodynamique du rotor,
le poids, la dynamique de la structure ainsi que le coût. Par le fait même, l’utilisation d’un alternateur
synchrone triphasé à aimants permanents à pôles saillants fournit une puissance intéressante sans tenir compte
d’un multiplicateur de vitesse étant donnée une génération d’énergie possible à basse vitesse (aux alentours de
400 RPM). Il s’agit donc d’un système à attaque directe, système où des développements technologiques sont
prévisibles. Malgré son poids plus important à comparer à un générateur synchrone à électro-aimants ou à un
générateur asynchrone, pour une basse puissance d’environ 1 kW, ce type de générateur respecte bien les
besoins demandés. En effet, il génère à n’importe quelle fréquence et, pour une unité autonome, cette
fréquence a peu d’importance puisque son rôle sera de charger des batteries. Il en résulte un contrôle de la
génératrice moins compliqué étant donné qu’il n’y a pas d’asservissement de l’excitation de la génératrice.
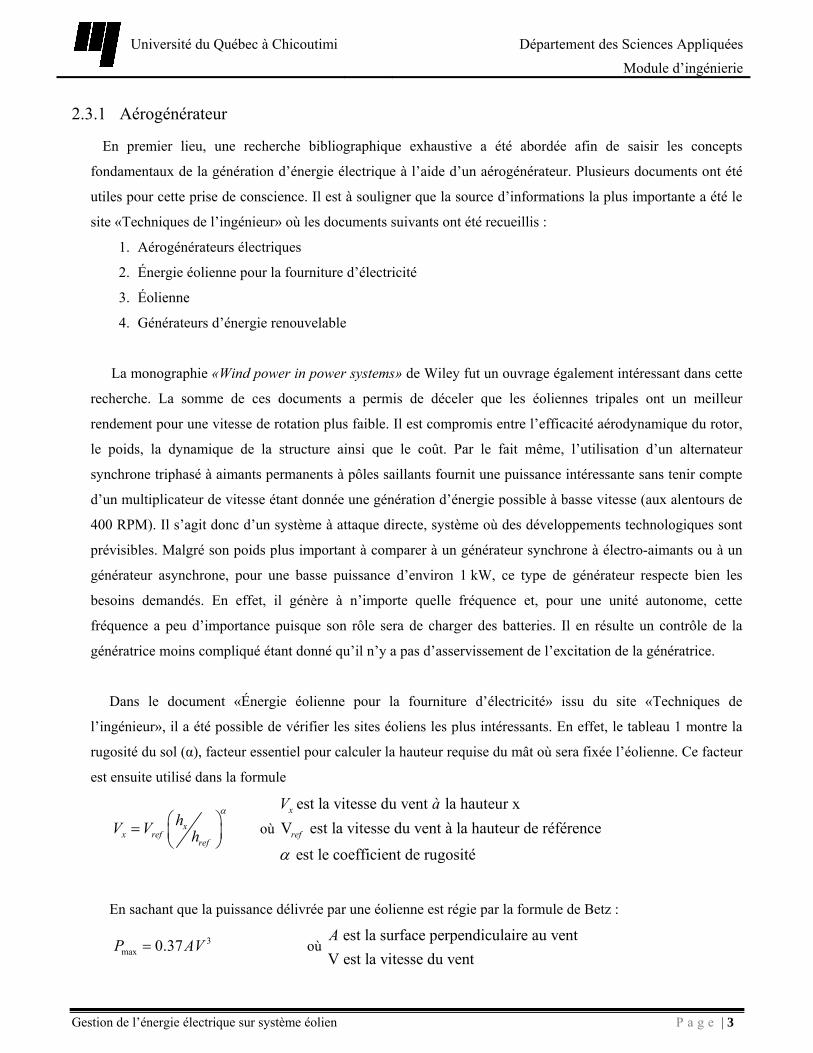
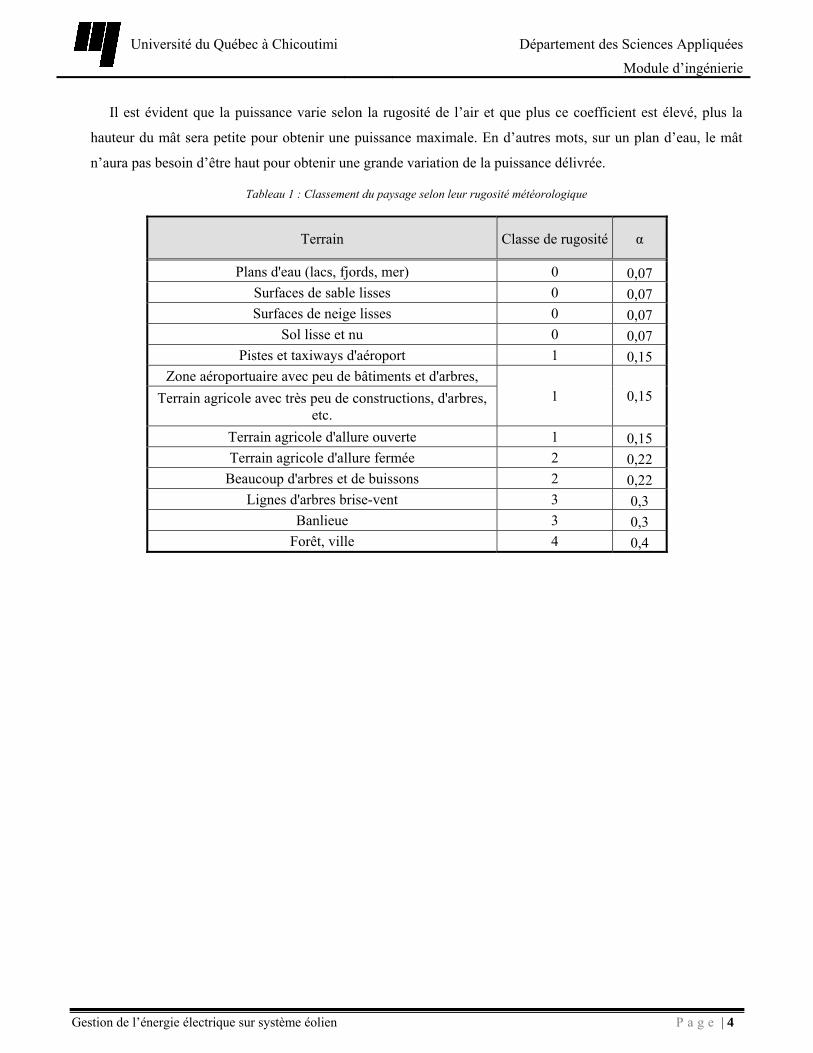
Dans le document «Énergie éolienne pour la fourniture d’électricité» issu du site «Techniques de
l’ingénieur», il a été possible de vérifier les sites éoliens les plus intéressants. En effet, le tableau 1 montre la
rugosité du sol (α), facteur essentiel pour calculer la hauteur requise du mât où sera fixée l’éolienne. Ce facteur
est ensuite utilisé dans la formule
xx ref
ref
hV V h
α⎛ ⎞= ⎜ ⎟⎝ ⎠
où
est la vitesse du vent la hauteur xV est la vitesse du vent à la hauteur de référence
est le coefficient de rugosité
x
ref
V à
α
En sachant que la puissance délivrée par une éolienne est régie par la formule de Betz :
3max 0.37P AV= où
est la surface perpendiculaire au ventV est la vitesse du ventA
1. Aérogénérateurs électriques
2. Énergie éolienne pour la fourniture d’électricité
3. Éolienne
4. Générateurs d’énergie renouvelable
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 4
Il est évident que la puissance varie selon la rugosité de l’air et que plus ce coefficient est élevé, plus la
hauteur du mât sera petite pour obtenir une puissance maximale. En d’autres mots, sur un plan d’eau, le mât
n’aura pas besoin d’être haut pour obtenir une grande variation de la puissance délivrée.
Tableau 1 : Classement du paysage selon leur rugosité météorologique
Terrain Classe de rugosité α
Plans d'eau (lacs, fjords, mer) 0 0,07 Surfaces de sable lisses 0 0,07 Surfaces de neige lisses 0 0,07
Sol lisse et nu 0 0,07 Pistes et taxiways d'aéroport 1 0,15
Zone aéroportuaire avec peu de bâtiments et d'arbres, 1 0,15 Terrain agricole avec très peu de constructions, d'arbres,
etc. Terrain agricole d'allure ouverte 1 0,15 Terrain agricole d'allure fermée 2 0,22
Beaucoup d'arbres et de buissons 2 0,22 Lignes d'arbres brise-vent 3 0,3
Banlieue 3 0,3 Forêt, ville 4 0,4
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 5
2.3.2 Électronique de puissance
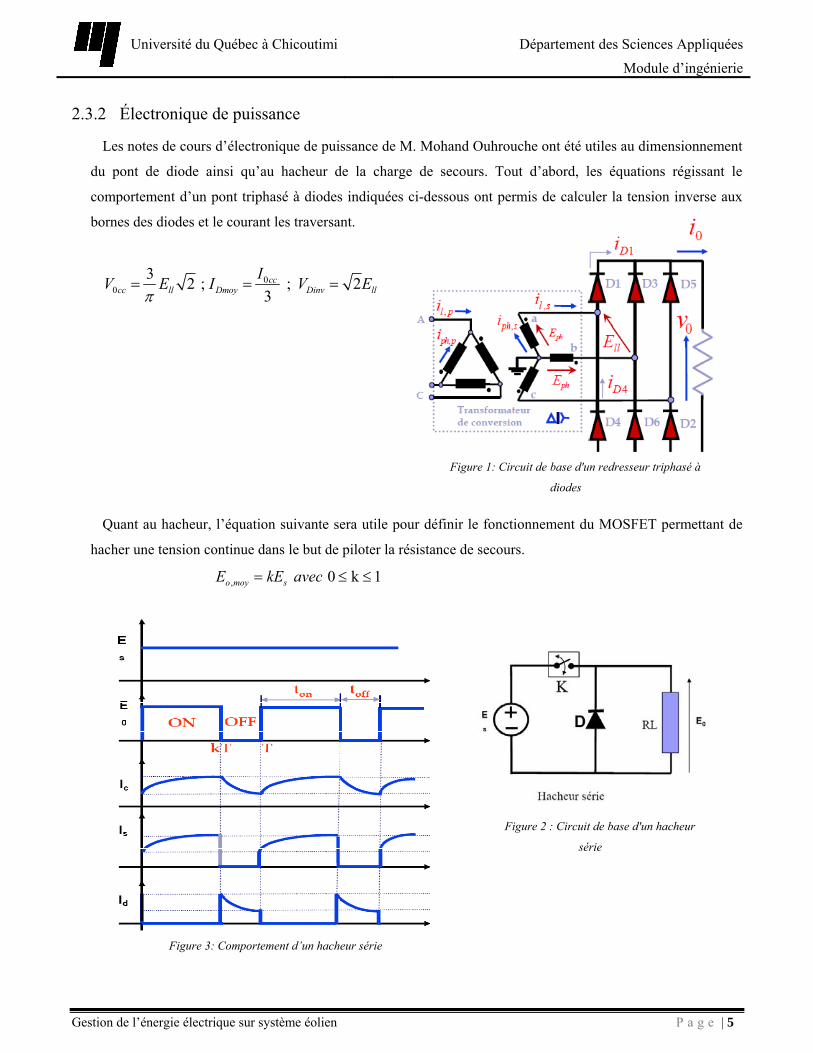
Les notes de cours d’électronique de puissance de M. Mohand Ouhrouche ont été utiles au dimensionnement
du pont de diode ainsi qu’au hacheur de la charge de secours. Tout d’abord, les équations régissant le
comportement d’un pont triphasé à diodes indiquées ci-dessous ont permis de calculer la tension inverse aux
bornes des diodes et le courant les traversant.
00
3 2 ; ; 23
cccc ll Dmoy Dinv ll
IV E I V Eπ
= = =
Quant au hacheur, l’équation suivante sera utile pour définir le fonctionnement du MOSFET permettant de
hacher une tension continue dans le but de piloter la résistance de secours.
, 0 k 1o moy sE kE avec= ≤ ≤
Figure 4 : Circuit de base d'un hacheur
série
Figure 1: Circuit de base d'un redresseur triphasé à
diodes
Figure 3: Comportement d’un hacheur série
Figure 2 : Circuit de base d'un hacheur
série
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 6
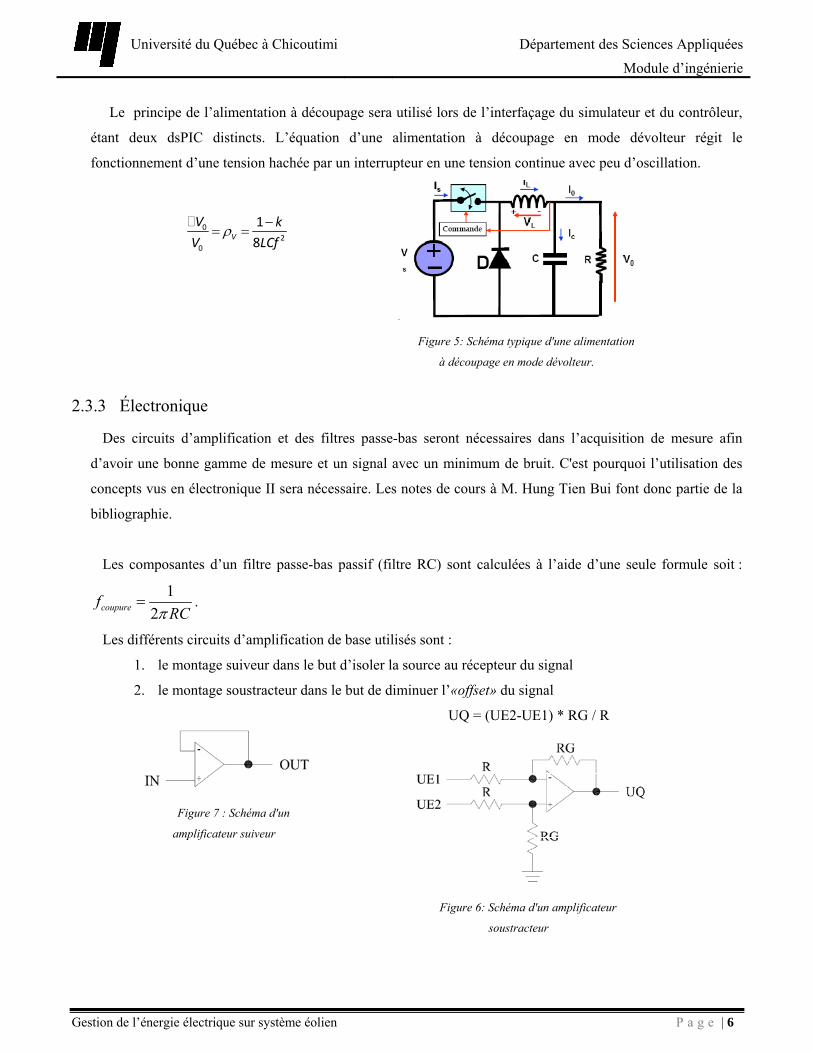
Le principe de l’alimentation à découpage sera utilisé lors de l’interfaçage du simulateur et du contrôleur,
étant deux dsPIC distincts. L’équation d’une alimentation à découpage en mode dévolteur régit le
fonctionnement d’une tension hachée par un interrupteur en une tension continue avec peu d’oscillation.
02
0
18V
V kV LCf
ρ −= =
2.3.3 Électronique
Des circuits d’amplification et des filtres passe-bas seront nécessaires dans l’acquisition de mesure afin
d’avoir une bonne gamme de mesure et un signal avec un minimum de bruit. C'est pourquoi l’utilisation des
concepts vus en électronique II sera nécessaire. Les notes de cours à M. Hung Tien Bui font donc partie de la
bibliographie.
Les composantes d’un filtre passe-bas passif (filtre RC) sont calculées à l’aide d’une seule formule soit :
12coupuref
RCπ= .
Les différents circuits d’amplification de base utilisés sont :
:
1. le montage suiveur dans le but d’isoler la source au récepteur du signal
2. le montage soustracteur dans le but de diminuer l’«offset» du signal
UQ = (UE2-UE1) * RG / R
Figure 7 : Schéma d'un
amplificateur suiveur
Figure 6: Schéma d'un amplificateur
soustracteur
Figure 5: Schéma typique d'une alimentation
à découpage en mode dévolteur.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 7
2.3.4 Dimensionnement des conducteurs et des protections
Afin d’être conforme selon le code d’électricité du Canada, une recherche dans le volume «Code canadien
d’électricité 2007» a été réalisée pour le dimensionnement des câbles et des protections contre les surintensités
et les surcharges. Les articles utilisés seront cités dans la partie conception des câbles et de la protection contre
les surintensités.
2.4 Objectifs généraux et spécifiques du projet
Ce projet de conception consiste à concevoir un prototype utilisant une éolienne, un système
d’accumulation et une génératrice diesel pouvant fournir une puissance à une petite charge, comme un chalet
en territoire éloigné, à une tension nominale de 120Vc.a. Il s’agit donc de développer un système de génération
d’énergie électrique autonome qui sera remplacé par une génératrice à combustion en l’absence de vent et
d’énergie sur le système d’accumulation de charges.
Explicitement, le système doit comprendre une régulation de la vitesse de rotation de l’aérogénérateur
lorsque la vitesse de vent est excessive afin de ne pas endommager l’éolienne. Elle doit comprendre un
système d’acquisition afin de vérifier le comportement du système sur une longue période, soit 30 jours. De
plus, un boîtier de commande doit être installé dans le but de freiner l’aérogénérateur manuellement dans une
situation d’urgence ou lors de manœuvres d’entretien. Finalement, un simulateur reproduisant les valeurs
mesurées par le système d’acquisition doit être conçu pour fin de vérification et d’étalonnage du contrôleur.
Ces objectifs sont les mêmes que ceux précités dans le plan de travail, écrit à la phase de démarrage du
projet.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 8
3 ASPECTS TECHNIQUES ET ÉLÉMENTS DE CONCEPTION RELATIFS AU PROJET
Ce point a pour but de présenter brièvement les différentes tâches faites depuis le début de ce projet de
conception. Suite à cette courte description, une présentation complète de la méthodologie et des tâches
effectuées sera abordée.
Suite à la remise du plan de projet, plusieurs heures ont été utilisés sur une recherche bibliographique plus
approfondie afin d’éclaircir les différents concepts sur la génération d’énergie à partir d’un système éolien. Le
nombre de pales à utiliser, l’étude du gisement éolien, le choix de l’alternateur à utiliser, l’utilisation ou non
d’un multiplicateur de vitesse ont été des critères importants à évaluer afin de cerner la puissance nominale et
le type d’alternateur pour le prototype.
Une fois l’alternateur choisi, l’achat du prototype (éolienne complète incluant le générateur, le moyeu et les
pales) a été fait et une recherche de matériel a été réalisée afin d’ajouter l’instrumentation voulue sur le
prototype. Tous les détails de ces achats sont présentés au tableau des dépenses.
À la réception du générateur, des tests préliminaires sur la rive de la rivière «Ashuapmushuan» ont été
réalisés afin de vérifier le comportement de l’éolienne sans contrôle et de vérifier les hypothèses soumises pour
l’asservissement de l’éolienne à sa capacité de puissance maximale. Des tests en laboratoire au local P2-2020
ont également réalisé afin d’observer le comportement du générateur entraîné à différente vitesse. Des courbes
de mesures en fonction de la vitesse seront illustrées dans ce rapport au point 3.1.4.
La présentation du système global incluant le générateur, l’électronique de puissance, les batteries, la charge
de secours, le contrôle et tout le dimensionnement de ces composantes seront présentés dans la partie 3.3.2 du
présent rapport. La justification des types de composante y sera également expliquée.
Dans le but de vérifier le comportement du système global, un simulateur sous le logiciel «Simulink» a été
implanté. Le développement de cette tâche et les observations s’y rattachant seront présentés au point 3.15.
La programmation de l’acquisition des valeurs venant des instruments de mesure sur dsPIC comme
l’ampèremètre, le fréquencemètre / tachymètre, l’anémomètre et le voltmètre ont été réalisés. Les schémas
électriques ainsi que le principe de programmation seront soumis au point 3.3.3.
La logique de contrôle qui est programmée dans le contrôleur a été effectuée. Plus précisément, un
logigramme et un schéma de blocs fonction seront exposés avec les explications s’y rattachant au point 3.3.4.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 9
Suite à ces étapes, un essai dans le laboratoire P2-2020 à la fin décembre a permis de vérifier le
fonctionnement du contrôleur et des éléments de mesure. Ces essais ont permis de constater le bon
fonctionnement de la plupart des éléments raccordés.
L’élaboration d’une interface d’acquisition en Visual Basic a été abordée afin d’effectuer l’acquisition de
données à une fréquence prédéterminée via une communication RS232 avec le microcontrôleur. Elle sera
expliquée au point 3.3.7. Également, un écran ACL permet de lire les valeurs mesurées en temps réel. Cet
affichage, abordé au point 3.3.5, sera fixé sur le boîtier de raccordement.
Finalement, le développement du simulateur reproduisant la tension du pont CC, le courant circulant dans le
pont CC, la vitesse de rotation du générateur ainsi que le vent afin de vérifier le bon fonctionnement du dsPIC
a été exécuté. Ce simulateur, exécuté avec un autre dsPIC, l’interface entre le simulateur et le contrôleur seront
expliqués au point 3.3.6.
3.1 Aspects techniques
3.1.1 Présentation des composantes principales
3.1.1.1 ÉOLIENNE
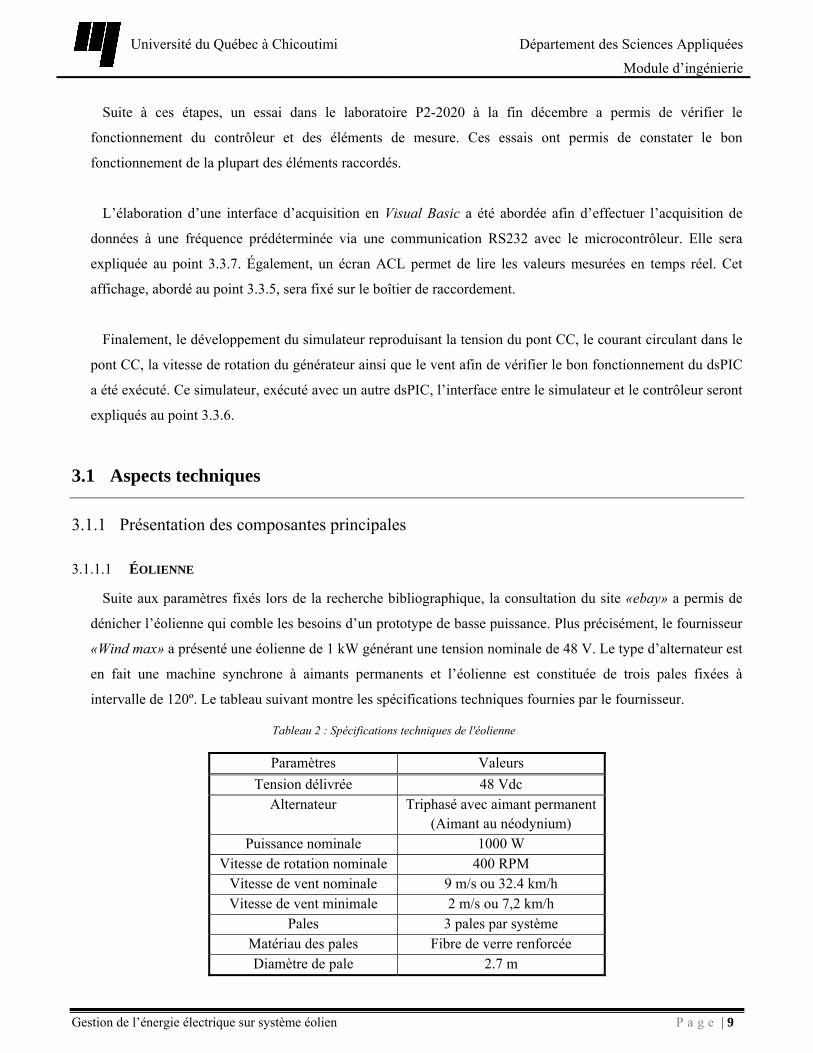
Suite aux paramètres fixés lors de la recherche bibliographique, la consultation du site «ebay» a permis de
dénicher l’éolienne qui comble les besoins d’un prototype de basse puissance. Plus précisément, le fournisseur
«Wind max» a présenté une éolienne de 1 kW générant une tension nominale de 48 V. Le type d’alternateur est
en fait une machine synchrone à aimants permanents et l’éolienne est constituée de trois pales fixées à
intervalle de 120º. Le tableau suivant montre les spécifications techniques fournies par le fournisseur.
Tableau 2 : Spécifications techniques de l'éolienne
Paramètres Valeurs Tension délivrée 48 Vdc
Alternateur Triphasé avec aimant permanent (Aimant au néodynium)
Puissance nominale 1000 W Vitesse de rotation nominale 400 RPM
Vitesse de vent nominale 9 m/s ou 32.4 km/h Vitesse de vent minimale 2 m/s ou 7,2 km/h
Pales 3 pales par système Matériau des pales Fibre de verre renforcée Diamètre de pale 2.7 m
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 10
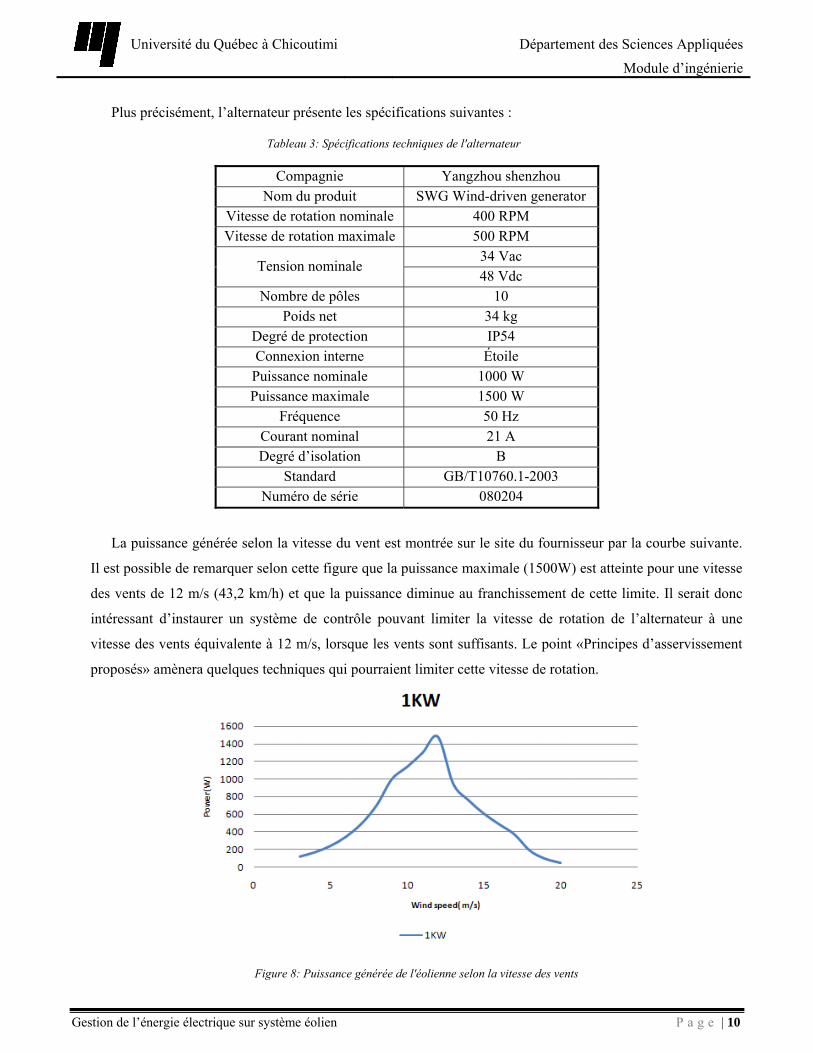
Plus précisément, l’alternateur présente les spécifications suivantes :
Tableau 3: Spécifications techniques de l'alternateur
Compagnie Yangzhou shenzhou Nom du produit SWG Wind-driven generator
Vitesse de rotation nominale 400 RPM Vitesse de rotation maximale 500 RPM
Tension nominale 34 Vac 48 Vdc
Nombre de pôles 10 Poids net 34 kg
Degré de protection IP54 Connexion interne Étoile
Puissance nominale 1000 W Puissance maximale 1500 W
Fréquence 50 Hz Courant nominal 21 A Degré d’isolation B
Standard GB/T10760.1-2003 Numéro de série 080204
La puissance générée selon la vitesse du vent est montrée sur le site du fournisseur par la courbe suivante.
Il est possible de remarquer selon cette figure que la puissance maximale (1500W) est atteinte pour une vitesse
des vents de 12 m/s (43,2 km/h) et que la puissance diminue au franchissement de cette limite. Il serait donc
intéressant d’instaurer un système de contrôle pouvant limiter la vitesse de rotation de l’alternateur à une
vitesse des vents équivalente à 12 m/s, lorsque les vents sont suffisants. Le point «Principes d’asservissement
proposés» amènera quelques techniques qui pourraient limiter cette vitesse de rotation.
Figure 8: Puissance générée de l'éolienne selon la vitesse des vents
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 11
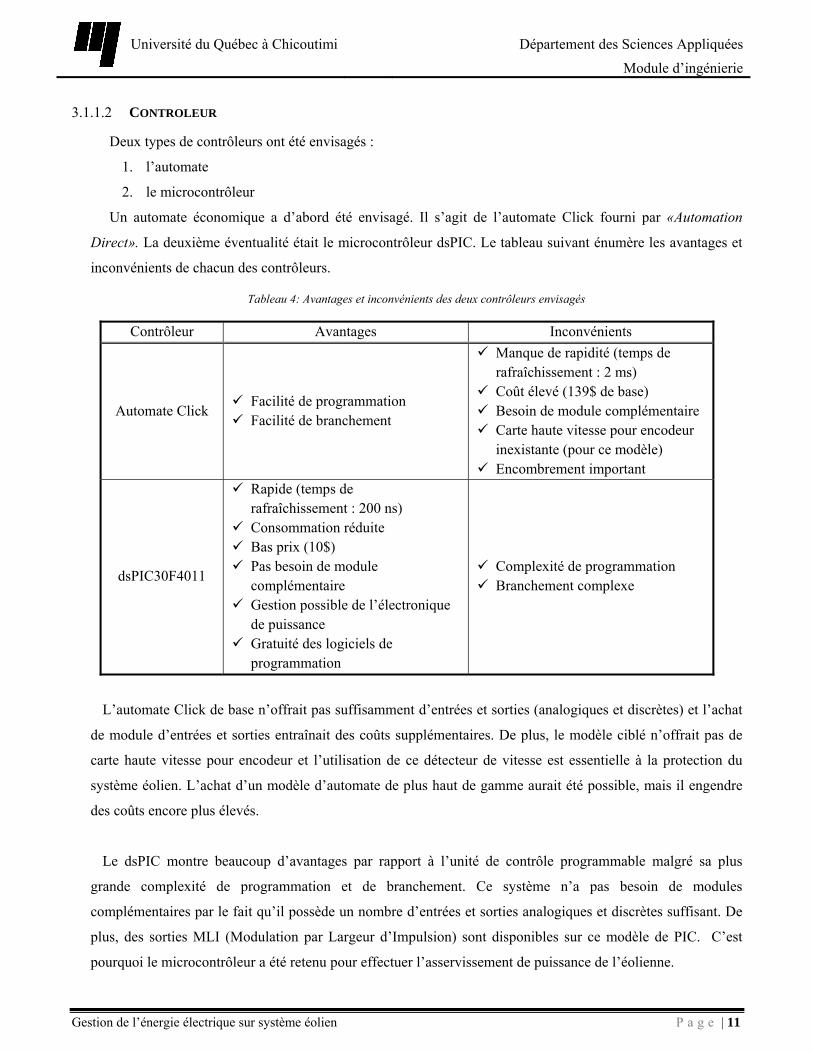
3.1.1.2 CONTROLEUR
Deux types de contrôleurs ont été envisagés :
1. l’automate
2. le microcontrôleur
Un automate économique a d’abord été envisagé. Il s’agit de l’automate Click fourni par «Automation
Direct». La deuxième éventualité était le microcontrôleur dsPIC. Le tableau suivant énumère les avantages et
inconvénients de chacun des contrôleurs.
Tableau 4: Avantages et inconvénients des deux contrôleurs envisagés
Contrôleur Avantages Inconvénients
Automate Click Facilité de programmation Facilité de branchement
Manque de rapidité (temps de rafraîchissement : 2 ms)
Coût élevé (139$ de base) Besoin de module complémentaire Carte haute vitesse pour encodeur
inexistante (pour ce modèle) Encombrement important
dsPIC30F4011
Rapide (temps de rafraîchissement : 200 ns)
Consommation réduite Bas prix (10$) Pas besoin de module
complémentaire Gestion possible de l’électronique
de puissance Gratuité des logiciels de
programmation
Complexité de programmation Branchement complexe
L’automate Click de base n’offrait pas suffisamment d’entrées et sorties (analogiques et discrètes) et l’achat
de module d’entrées et sorties entraînait des coûts supplémentaires. De plus, le modèle ciblé n’offrait pas de
carte haute vitesse pour encodeur et l’utilisation de ce détecteur de vitesse est essentielle à la protection du
système éolien. L’achat d’un modèle d’automate de plus haut de gamme aurait été possible, mais il engendre
des coûts encore plus élevés.
Le dsPIC montre beaucoup d’avantages par rapport à l’unité de contrôle programmable malgré sa plus
grande complexité de programmation et de branchement. Ce système n’a pas besoin de modules
complémentaires par le fait qu’il possède un nombre d’entrées et sorties analogiques et discrètes suffisant. De
plus, des sorties MLI (Modulation par Largeur d’Impulsion) sont disponibles sur ce modèle de PIC. C’est
pourquoi le microcontrôleur a été retenu pour effectuer l’asservissement de puissance de l’éolienne.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 12
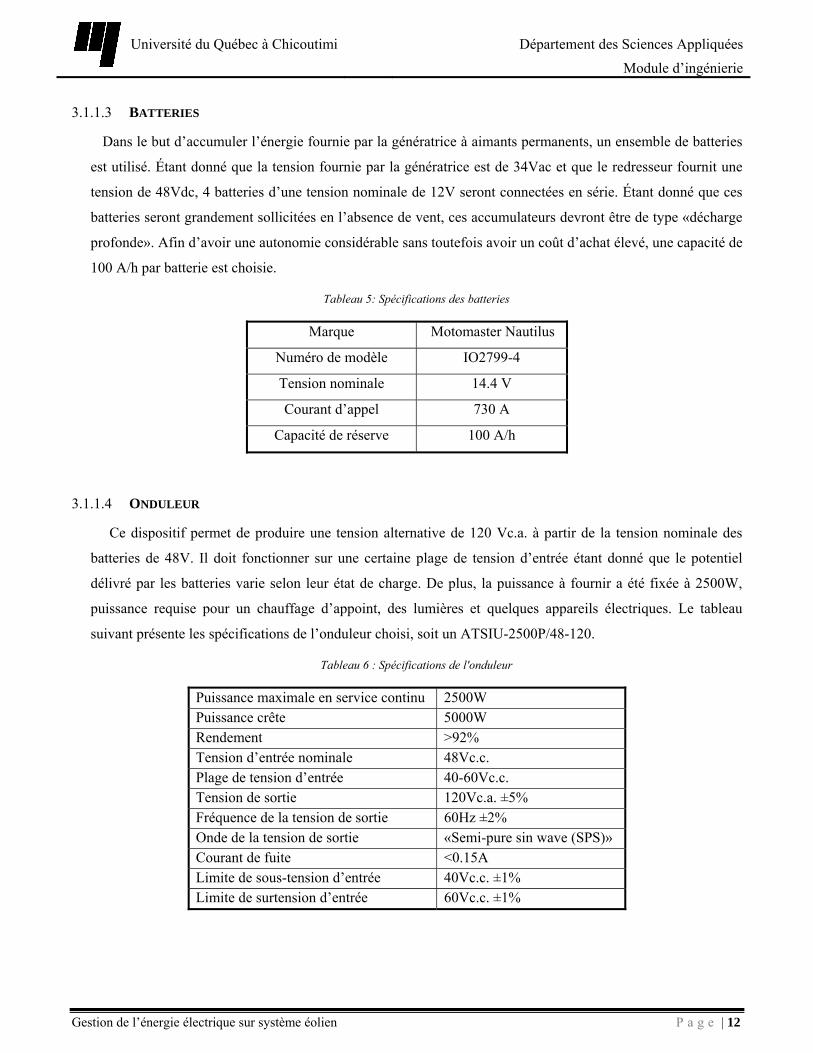
3.1.1.3 BATTERIES
Dans le but d’accumuler l’énergie fournie par la génératrice à aimants permanents, un ensemble de batteries
est utilisé. Étant donné que la tension fournie par la génératrice est de 34Vac et que le redresseur fournit une
tension de 48Vdc, 4 batteries d’une tension nominale de 12V seront connectées en série. Étant donné que ces
batteries seront grandement sollicitées en l’absence de vent, ces accumulateurs devront être de type «décharge
profonde». Afin d’avoir une autonomie considérable sans toutefois avoir un coût d’achat élevé, une capacité de
100 A/h par batterie est choisie.
Tableau 5: Spécifications des batteries
Marque Motomaster Nautilus
Numéro de modèle IO2799-4
Tension nominale 14.4 V
Courant d’appel 730 A
Capacité de réserve 100 A/h
3.1.1.4 ONDULEUR
Ce dispositif permet de produire une tension alternative de 120 Vc.a. à partir de la tension nominale des
batteries de 48V. Il doit fonctionner sur une certaine plage de tension d’entrée étant donné que le potentiel
délivré par les batteries varie selon leur état de charge. De plus, la puissance à fournir a été fixée à 2500W,
puissance requise pour un chauffage d’appoint, des lumières et quelques appareils électriques. Le tableau
suivant présente les spécifications de l’onduleur choisi, soit un ATSIU-2500P/48-120.
Tableau 6 : Spécifications de l'onduleur
Puissance maximale en service continu 2500W Puissance crête 5000W Rendement >92% Tension d’entrée nominale 48Vc.c. Plage de tension d’entrée 40-60Vc.c. Tension de sortie 120Vc.a. ±5% Fréquence de la tension de sortie 60Hz ±2% Onde de la tension de sortie «Semi-pure sin wave (SPS)» Courant de fuite <0.15A Limite de sous-tension d’entrée 40Vc.c. ±1% Limite de surtension d’entrée 60Vc.c. ±1%
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 13
3.1.2 Principes d’asservissement proposés
3.1.2.1 HYPOTHESES
Afin d’augmenter l’efficacité de l’éolienne, 5 principes de fonctionnement ont été pensés. Tout d’abord, le
premier principe était d’effacer l’éolienne du vent. Pour ce faire, deux techniques ont été soumises :
1. asservir la vitesse de rotation des pales par la modification de la trajectoire de la queue par un vérin
électrique
2. asservir la vitesse de rotation des pales par la rotation de la tête avec un servomoteur fixé sur le pivot
entre l’alternateur et le mât
3. asservir la vitesse de rotation des pales l’inclinaison horizontale de l’alternateur et des pales par le
biais d’un vérin électrique
Deux autres solutions sont possibles :
4. Freiner l’éolienne en augmentant considérablement la charge avec un banc de résistance
5. Installer un frein mécanique directement sur l’arbre de l’alternateur
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 14
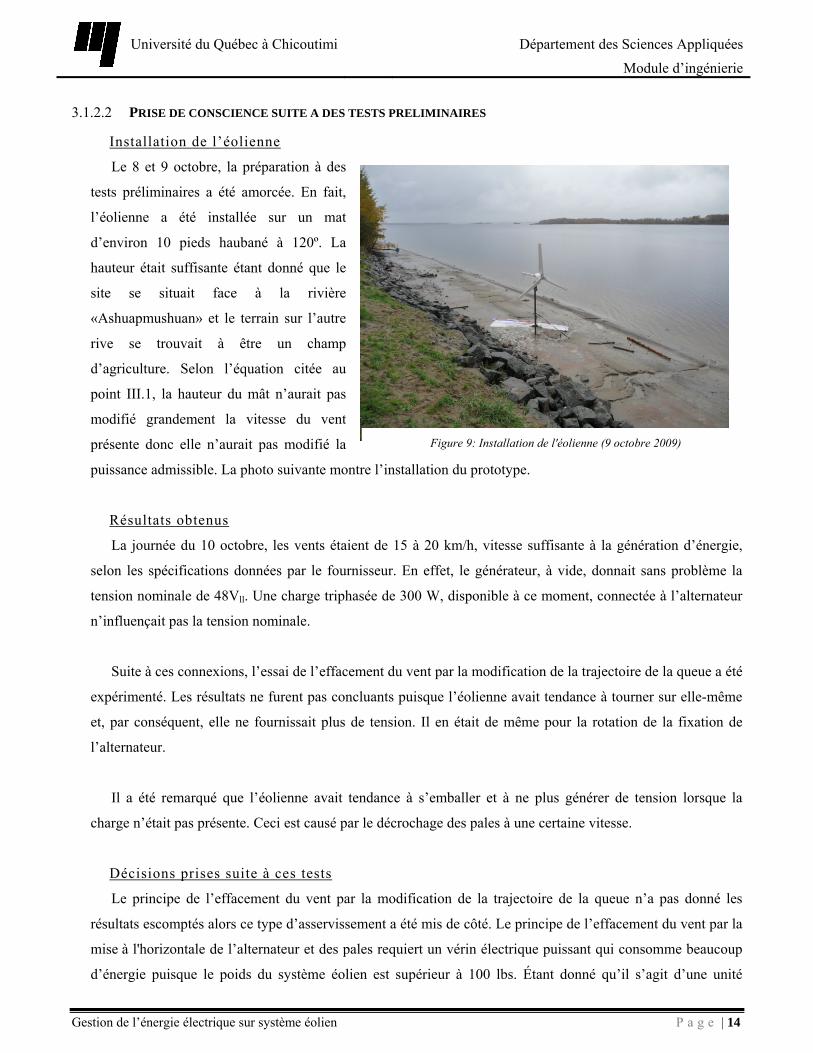
3.1.2.2 PRISE DE CONSCIENCE SUITE A DES TESTS PRELIMINAIRES
Installation de l’éolienne
Le 8 et 9 octobre, la préparation à des
tests préliminaires a été amorcée. En fait,
l’éolienne a été installée sur un mat
d’environ 10 pieds haubané à 120º. La
hauteur était suffisante étant donné que le
site se situait face à la rivière
«Ashuapmushuan» et le terrain sur l’autre
rive se trouvait à être un champ
d’agriculture. Selon l’équation citée au
point III.1, la hauteur du mât n’aurait pas
modifié grandement la vitesse du vent
présente donc elle n’aurait pas modifié la
puissance admissible. La photo suivante montre l’installation du prototype.
Résultats obtenus
La journée du 10 octobre, les vents étaient de 15 à 20 km/h, vitesse suffisante à la génération d’énergie,
selon les spécifications données par le fournisseur. En effet, le générateur, à vide, donnait sans problème la
tension nominale de 48Vll. Une charge triphasée de 300 W, disponible à ce moment, connectée à l’alternateur
n’influençait pas la tension nominale.
Suite à ces connexions, l’essai de l’effacement du vent par la modification de la trajectoire de la queue a été
expérimenté. Les résultats ne furent pas concluants puisque l’éolienne avait tendance à tourner sur elle-même
et, par conséquent, elle ne fournissait plus de tension. Il en était de même pour la rotation de la fixation de
l’alternateur.
Il a été remarqué que l’éolienne avait tendance à s’emballer et à ne plus générer de tension lorsque la
charge n’était pas présente. Ceci est causé par le décrochage des pales à une certaine vitesse.
Décisions prises suite à ces tests
Le principe de l’effacement du vent par la modification de la trajectoire de la queue n’a pas donné les
résultats escomptés alors ce type d’asservissement a été mis de côté. Le principe de l’effacement du vent par la
mise à l'horizontale de l’alternateur et des pales requiert un vérin électrique puissant qui consomme beaucoup
d’énergie puisque le poids du système éolien est supérieur à 100 lbs. Étant donné qu’il s’agit d’une unité
Figure 9: Installation de l'éolienne (9 octobre 2009)

Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 15
autonome de génération d’énergie, il n’est pas avantageux que cette dernière consomme une quantité non
négligeable de puissance. De plus, il sera important de vérifier la charge continuellement afin que l’alternateur
ne s’emballe pas. La possibilité d’une résistance à grande puissance est toujours envisagée. Le frein mécanique
à maintenant est écarté par la complexité de l’assemblage.
Tableau 7: Résultats et décisions préliminaires suite au premier essai
Principe d’asservissement Observations ou décision préliminaires
Effacement du vent par la
modification de la trajectoire de la
queue
Perte de contrôle de la rotation du pivot
Génération d’énergie cessante
Effacement du vent par la rotation du
pivot du générateur
Solution toujours envisageable
Effacement du vent par l’inclinaison
horizontale de l’alternateur
Consommation d’énergie trop grande par
l’actionneur électrique
Augmentation de la charge en
utilisant une résistance
Solution toujours envisageable
Freinage mécanique sur l’arbre de
l’alternateur
Complexité de l’assemblage
3.1.3 Résistance de freinage à grande puissance
Suite aux essais du 9 octobre, l’implantation d’un système de freinage avec une résistance est adoptée.
L’installation d’un système de pilotage de « MOSFET » permet de hacher la tension continue aux bornes de la
résistance de freinage. Cette dite résistance sert de charge supplémentaire applicable à tout moment sur le
système pour un freinage de l’éolienne. Le but de contrôler l’ouverture du « MOSFET » permet d’augmenter
ou de diminuer la tension moyenne, jouant ainsi directement sur la puissance de la charge. Le procédé pour
hacher la tension de grille du « MOSFET » est la modulation par largeur d’impulsion. En variant le rapport
cyclique, de 0 à 1, l’activation de la grille se fait sur une courte ou longue durée sur une même période.
( )2cckV
PR
=
Un contact de relais sera câblé en parallèle avec le MOSFET dans le but d’activer directement la
résistance en cas de défaillance du contrôleur.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 16
3.1.4 Essais de l’alternateur en laboratoire
Le 15 et 16 octobre, des essais de l’alternateur en laboratoire ont été effectués. Le générateur a été couplé
avec les moteurs à courant continu disponible au local P2-2020. Il a donc été possible d’observer le
comportement de l’alternateur à aimants permanents à différentes vitesses et à différentes charges.
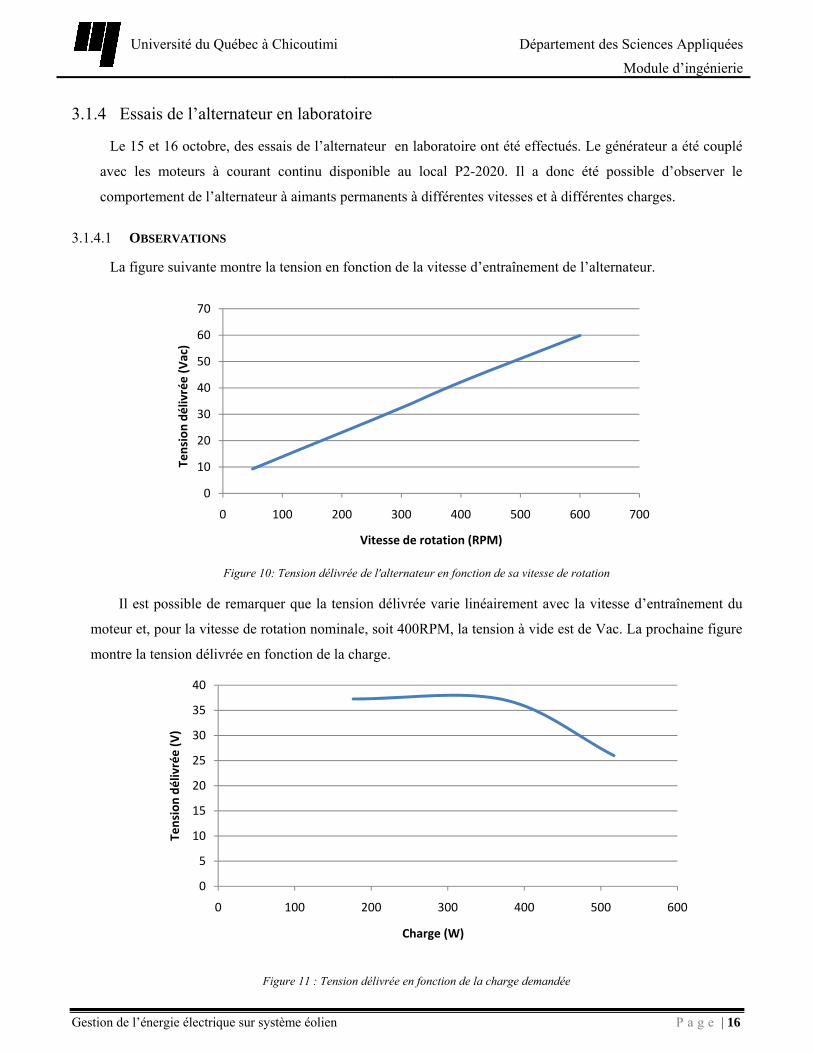
3.1.4.1 OBSERVATIONS
La figure suivante montre la tension en fonction de la vitesse d’entraînement de l’alternateur.
Figure 10: Tension délivrée de l'alternateur en fonction de sa vitesse de rotation
Il est possible de remarquer que la tension délivrée varie linéairement avec la vitesse d’entraînement du
moteur et, pour la vitesse de rotation nominale, soit 400RPM, la tension à vide est de Vac. La prochaine figure
montre la tension délivrée en fonction de la charge.
Figure 11 : Tension délivrée en fonction de la charge demandée
0
10
20
30
40
50
60
70
0 100 200 300 400 500 600 700
Tension dé
livrée (Vac)
Vitesse de rotation (RPM)
0
5
10
15
20
25
30
35
40
0 100 200 300 400 500 600
Tension dé
livrée (V)
Charge (W)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 17
Cette deuxième figure démontre que la tension du générateur a tendance à diminuer à l’augmentation de
la charge. Ce comportement est dû à l’absence du contrôle du courant d’excitation de la génératrice puisque
l’excitation est fixe et fournie par les aimants. Par conséquent, la tension délivrée dépend de la charge
demandée.
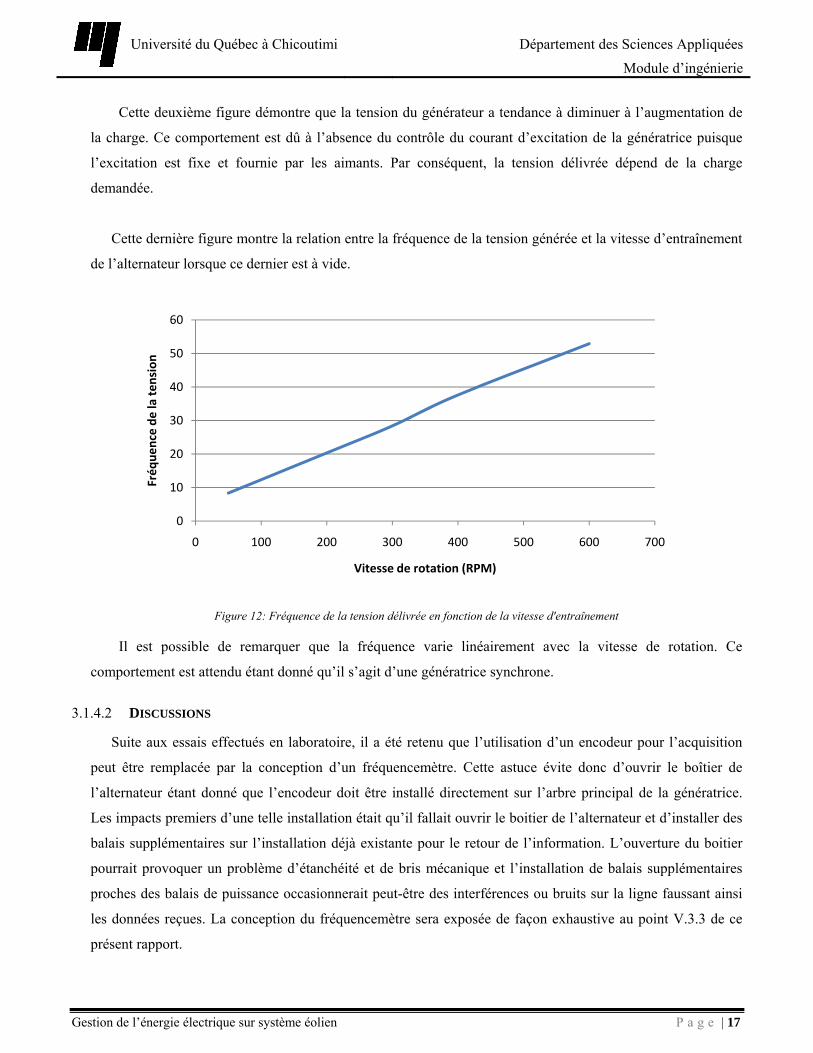
Cette dernière figure montre la relation entre la fréquence de la tension générée et la vitesse d’entraînement
de l’alternateur lorsque ce dernier est à vide.
Figure 12: Fréquence de la tension délivrée en fonction de la vitesse d'entraînement
Il est possible de remarquer que la fréquence varie linéairement avec la vitesse de rotation. Ce
comportement est attendu étant donné qu’il s’agit d’une génératrice synchrone.
3.1.4.2 DISCUSSIONS
Suite aux essais effectués en laboratoire, il a été retenu que l’utilisation d’un encodeur pour l’acquisition
peut être remplacée par la conception d’un fréquencemètre. Cette astuce évite donc d’ouvrir le boîtier de
l’alternateur étant donné que l’encodeur doit être installé directement sur l’arbre principal de la génératrice.
Les impacts premiers d’une telle installation était qu’il fallait ouvrir le boitier de l’alternateur et d’installer des
balais supplémentaires sur l’installation déjà existante pour le retour de l’information. L’ouverture du boitier
pourrait provoquer un problème d’étanchéité et de bris mécanique et l’installation de balais supplémentaires
proches des balais de puissance occasionnerait peut-être des interférences ou bruits sur la ligne faussant ainsi
les données reçues. La conception du fréquencemètre sera exposée de façon exhaustive au point V.3.3 de ce
présent rapport.
0
10
20
30
40
50
60
0 100 200 300 400 500 600 700
Fréq
uence de
la te
nsion
Vitesse de rotation (RPM)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 18
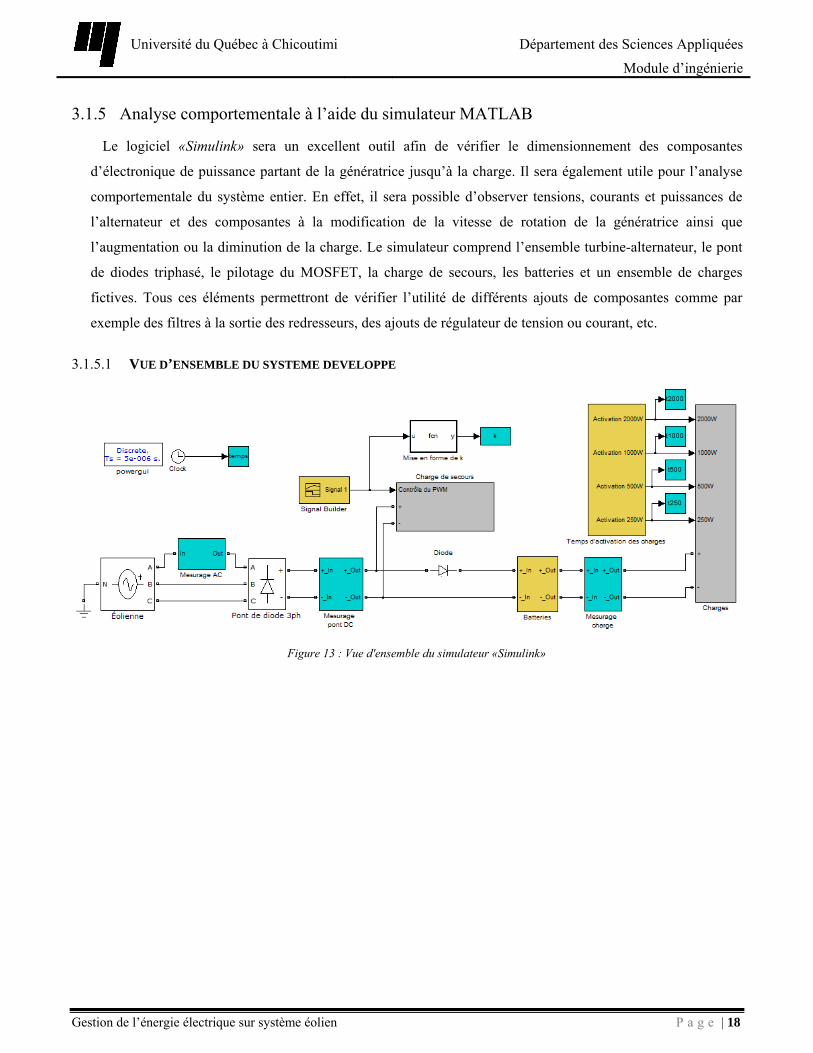
3.1.5 Analyse comportementale à l’aide du simulateur MATLAB
Le logiciel «Simulink» sera un excellent outil afin de vérifier le dimensionnement des composantes
d’électronique de puissance partant de la génératrice jusqu’à la charge. Il sera également utile pour l’analyse
comportementale du système entier. En effet, il sera possible d’observer tensions, courants et puissances de
l’alternateur et des composantes à la modification de la vitesse de rotation de la génératrice ainsi que
l’augmentation ou la diminution de la charge. Le simulateur comprend l’ensemble turbine-alternateur, le pont
de diodes triphasé, le pilotage du MOSFET, la charge de secours, les batteries et un ensemble de charges
fictives. Tous ces éléments permettront de vérifier l’utilité de différents ajouts de composantes comme par
exemple des filtres à la sortie des redresseurs, des ajouts de régulateur de tension ou courant, etc.
3.1.5.1 VUE D’ENSEMBLE DU SYSTEME DEVELOPPE
Figure 13 : Vue d'ensemble du simulateur «Simulink»

Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 19
3.1.5.2 COMPOSANTES
Éolienne
L’alternateur à aimants permanents a été
modélisé avec une source triphasée variable. Ce
type de bloc permet de varier la tension durant la
simulation, représentant la variation de la vitesse
de rotation. Cette relation a été démontrée à la
figure 6 du point IV.4 de la méthodologie
utilisée. La programmation de ce bloc se réalise
selon trois paramètres nominaux : la tension
phase-phase nominale, le déphasage et la
fréquence. Par la suite, la variation d’amplitude
est modélisée par une fonction rampe où la pente
est paramétrée en pu/s et le temps variation
(temps de départ et temps final). C’est à
l’utilisateur à paramétrer cette variation selon le
comportement voulu.
Figure 14: Programmation de l'aérogénérateur
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 20
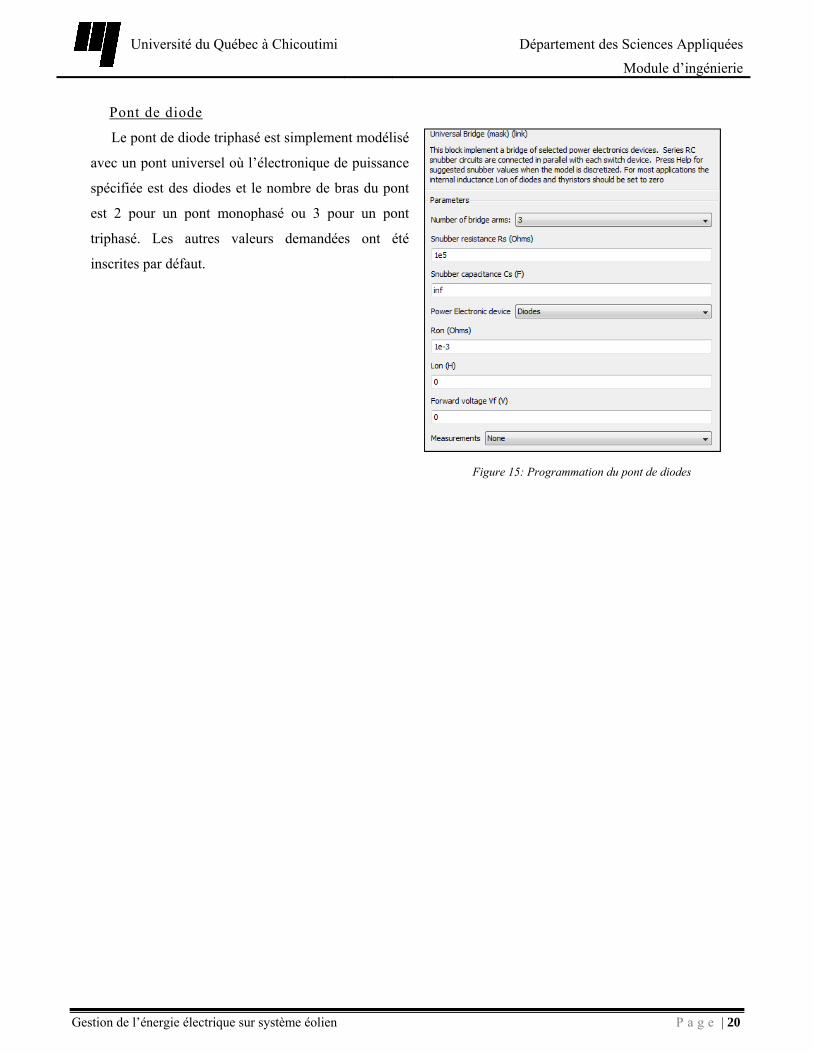
Pont de diode
Le pont de diode triphasé est simplement modélisé
avec un pont universel où l’électronique de puissance
spécifiée est des diodes et le nombre de bras du pont
est 2 pour un pont monophasé ou 3 pour un pont
triphasé. Les autres valeurs demandées ont été
inscrites par défaut.
Figure 15: Programmation du pont de diodes
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 21
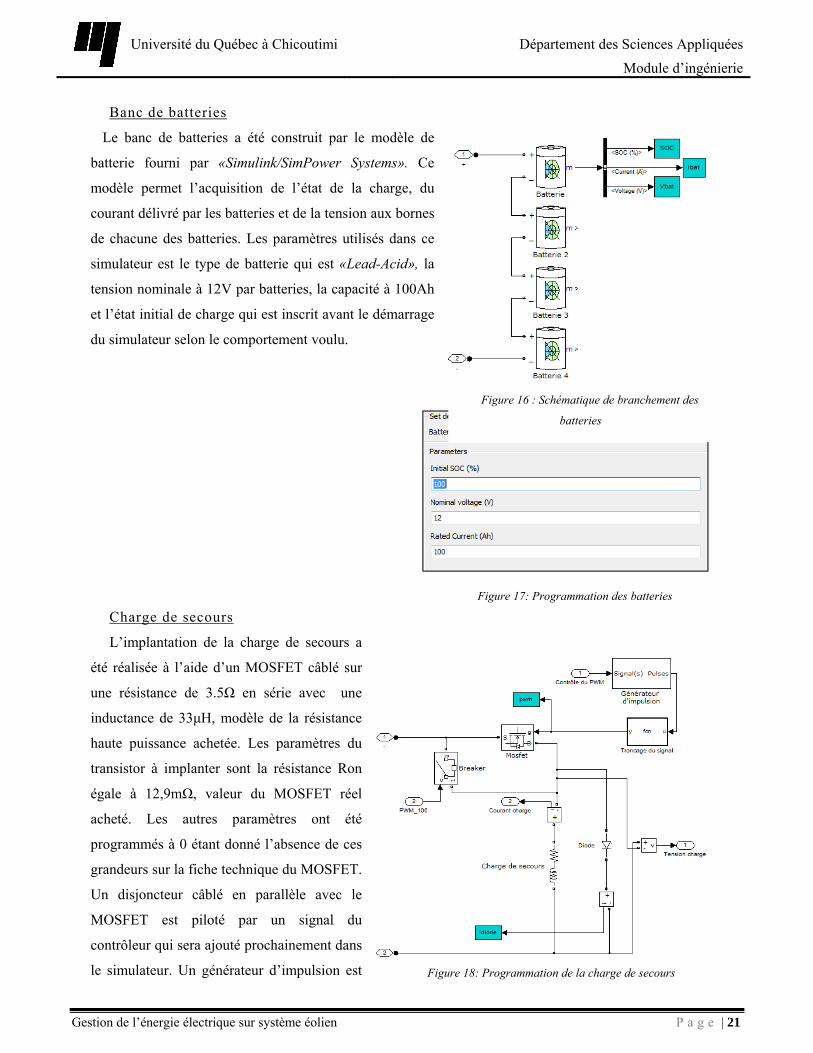
Banc de batteries
Le banc de batteries a été construit par le modèle de
batterie fourni par «Simulink/SimPower Systems». Ce
modèle permet l’acquisition de l’état de la charge, du
courant délivré par les batteries et de la tension aux bornes
de chacune des batteries. Les paramètres utilisés dans ce
simulateur est le type de batterie qui est «Lead-Acid», la
tension nominale à 12V par batteries, la capacité à 100Ah
et l’état initial de charge qui est inscrit avant le démarrage
du simulateur selon le comportement voulu.
Charge de secours
L’implantation de la charge de secours a
été réalisée à l’aide d’un MOSFET câblé sur
une résistance de 3.5Ω en série avec une
inductance de 33μH, modèle de la résistance
haute puissance achetée. Les paramètres du
transistor à implanter sont la résistance Ron
égale à 12,9mΩ, valeur du MOSFET réel
acheté. Les autres paramètres ont été
programmés à 0 étant donné l’absence de ces
grandeurs sur la fiche technique du MOSFET.
Un disjoncteur câblé en parallèle avec le
MOSFET est piloté par un signal du
contrôleur qui sera ajouté prochainement dans
le simulateur. Un générateur d’impulsion est
Figure 16 : Schématique de branchement des
batteries
Figure 17: Programmation des batteries
Figure 18: Programmation de la charge de secours
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 22
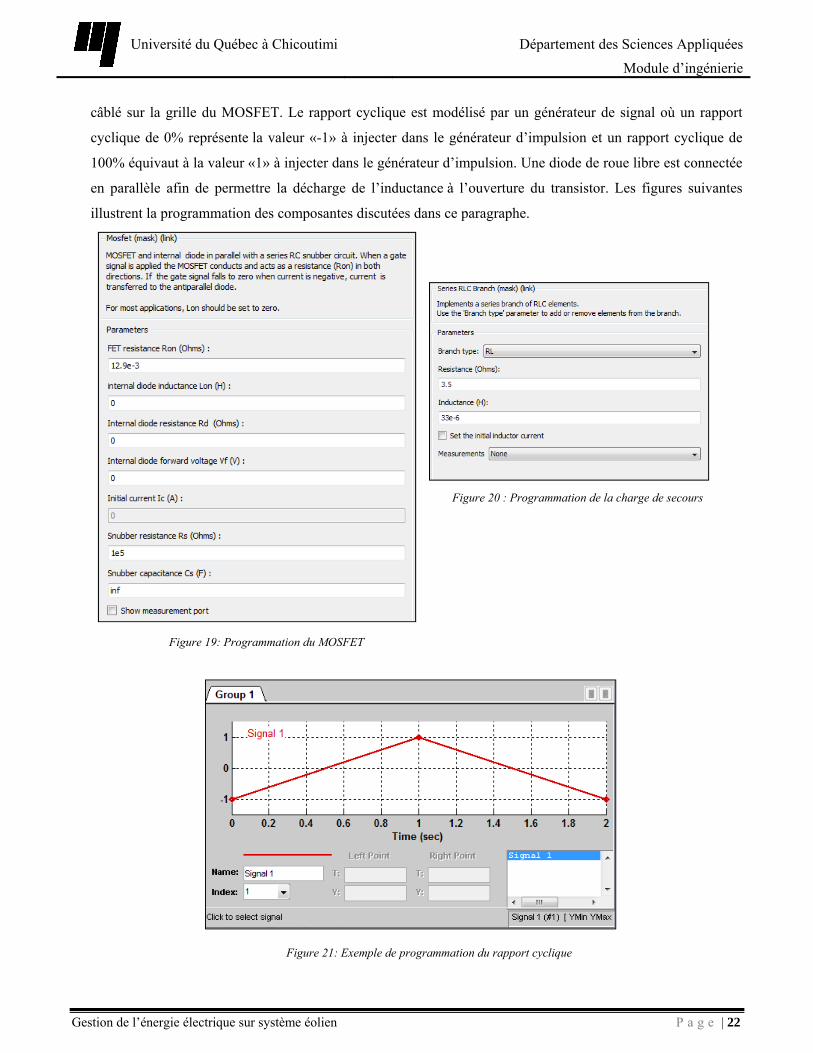
câblé sur la grille du MOSFET. Le rapport cyclique est modélisé par un générateur de signal où un rapport
cyclique de 0% représente la valeur «-1» à injecter dans le générateur d’impulsion et un rapport cyclique de
100% équivaut à la valeur «1» à injecter dans le générateur d’impulsion. Une diode de roue libre est connectée
en parallèle afin de permettre la décharge de l’inductance à l’ouverture du transistor. Les figures suivantes
illustrent la programmation des composantes discutées dans ce paragraphe.
Figure 19: Programmation du MOSFET
Figure 20 : Programmation de la charge de secours
Figure 21: Exemple de programmation du rapport cyclique
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 23
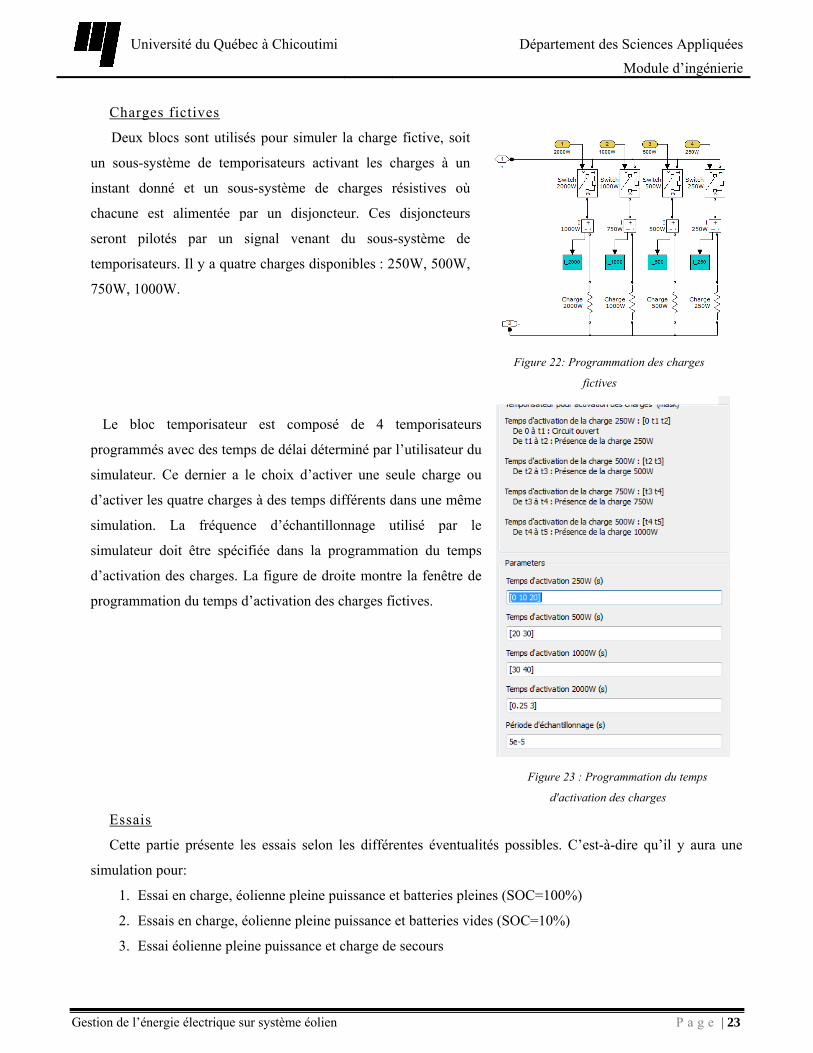
Charges fictives Deux blocs sont utilisés pour simuler la charge fictive, soit
un sous-système de temporisateurs activant les charges à un
instant donné et un sous-système de charges résistives où
chacune est alimentée par un disjoncteur. Ces disjoncteurs
seront pilotés par un signal venant du sous-système de
temporisateurs. Il y a quatre charges disponibles : 250W, 500W,
750W, 1000W.
Le bloc temporisateur est composé de 4 temporisateurs
programmés avec des temps de délai déterminé par l’utilisateur du
simulateur. Ce dernier a le choix d’activer une seule charge ou
d’activer les quatre charges à des temps différents dans une même
simulation. La fréquence d’échantillonnage utilisé par le
simulateur doit être spécifiée dans la programmation du temps
d’activation des charges. La figure de droite montre la fenêtre de
programmation du temps d’activation des charges fictives.
Essais
Cette partie présente les essais selon les différentes éventualités possibles. C’est-à-dire qu’il y aura une
simulation pour:
1. Essai en charge, éolienne pleine puissance et batteries pleines (SOC=100%)
2. Essais en charge, éolienne pleine puissance et batteries vides (SOC=10%)
3. Essai éolienne pleine puissance et charge de secours
Figure 23 : Programmation du temps
d'activation des charges
Figure 22: Programmation des charges
fictives
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 24
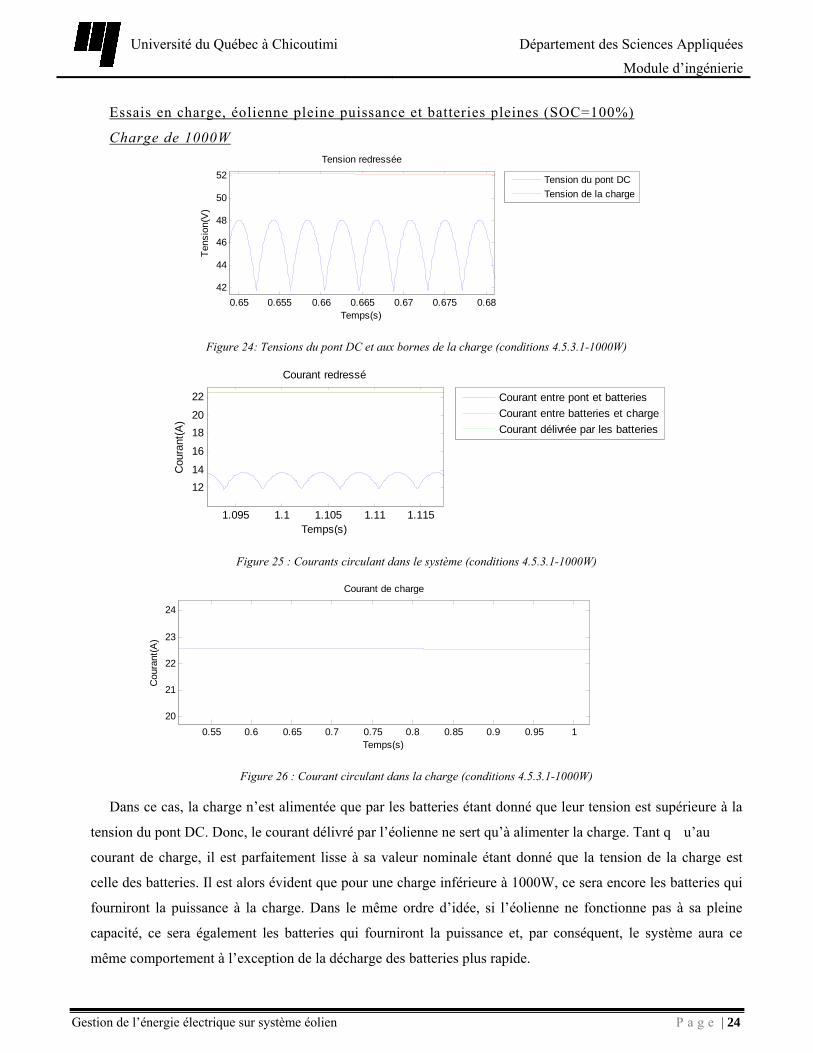
Essais en charge, éolienne pleine puissance et batteries pleines (SOC=100%)
Charge de 1000W
Figure 24: Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.1-1000W)
Figure 25 : Courants circulant dans le système (conditions 4.5.3.1-1000W)
Figure 26 : Courant circulant dans la charge (conditions 4.5.3.1-1000W)
Dans ce cas, la charge n’est alimentée que par les batteries étant donné que leur tension est supérieure à la
tension du pont DC. Donc, le courant délivré par l’éolienne ne sert qu’à alimenter la charge. Tant q u’au
courant de charge, il est parfaitement lisse à sa valeur nominale étant donné que la tension de la charge est
celle des batteries. Il est alors évident que pour une charge inférieure à 1000W, ce sera encore les batteries qui
fourniront la puissance à la charge. Dans le même ordre d’idée, si l’éolienne ne fonctionne pas à sa pleine
capacité, ce sera également les batteries qui fourniront la puissance et, par conséquent, le système aura ce
même comportement à l’exception de la décharge des batteries plus rapide.
0.65 0.655 0.66 0.665 0.67 0.675 0.6842
44
46
48
50
52Tension redressée
Temps(s)
Tens
ion(
V)
Tension du pont DCTension de la charge
1.095 1.1 1.105 1.11 1.115
1214
16
1820
22
Courant redressé
Temps(s)
Cou
rant
(A)
Courant entre pont et batteriesCourant entre batteries et chargeCourant délivrée par les batteries
0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 120
21
22
23
24
Courant de charge
Temps(s)
Cou
rant
(A)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 25
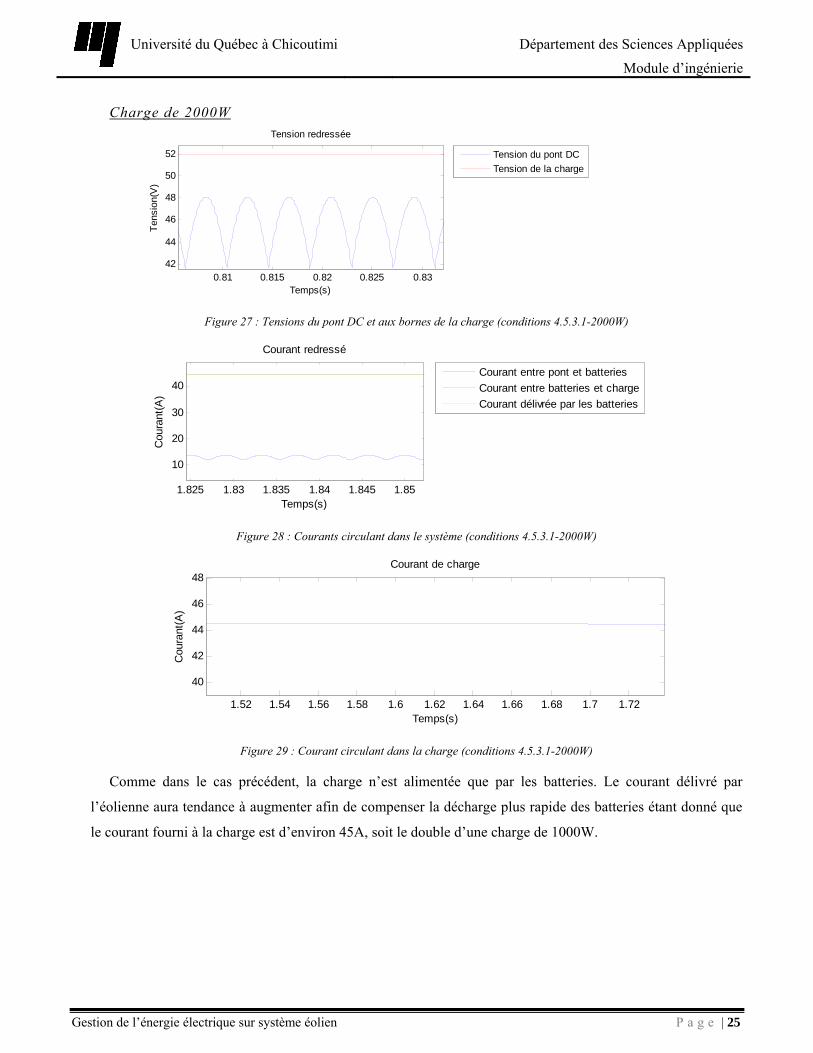
Charge de 2000W
Figure 27 : Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.1-2000W)
Figure 28 : Courants circulant dans le système (conditions 4.5.3.1-2000W)
Figure 29 : Courant circulant dans la charge (conditions 4.5.3.1-2000W)
Comme dans le cas précédent, la charge n’est alimentée que par les batteries. Le courant délivré par
l’éolienne aura tendance à augmenter afin de compenser la décharge plus rapide des batteries étant donné que
le courant fourni à la charge est d’environ 45A, soit le double d’une charge de 1000W.
0.81 0.815 0.82 0.825 0.8342
44
46
48
50
52
Tension redressée
Temps(s)
Tens
ion(
V)
Tension du pont DCTension de la charge
1.825 1.83 1.835 1.84 1.845 1.85
10
20
30
40
Courant redressé
Temps(s)
Cou
rant
(A)
Courant entre pont et batteriesCourant entre batteries et chargeCourant délivrée par les batteries
1.52 1.54 1.56 1.58 1.6 1.62 1.64 1.66 1.68 1.7 1.72
40
42
44
46
48Courant de charge
Temps(s)
Cou
rant
(A)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 26
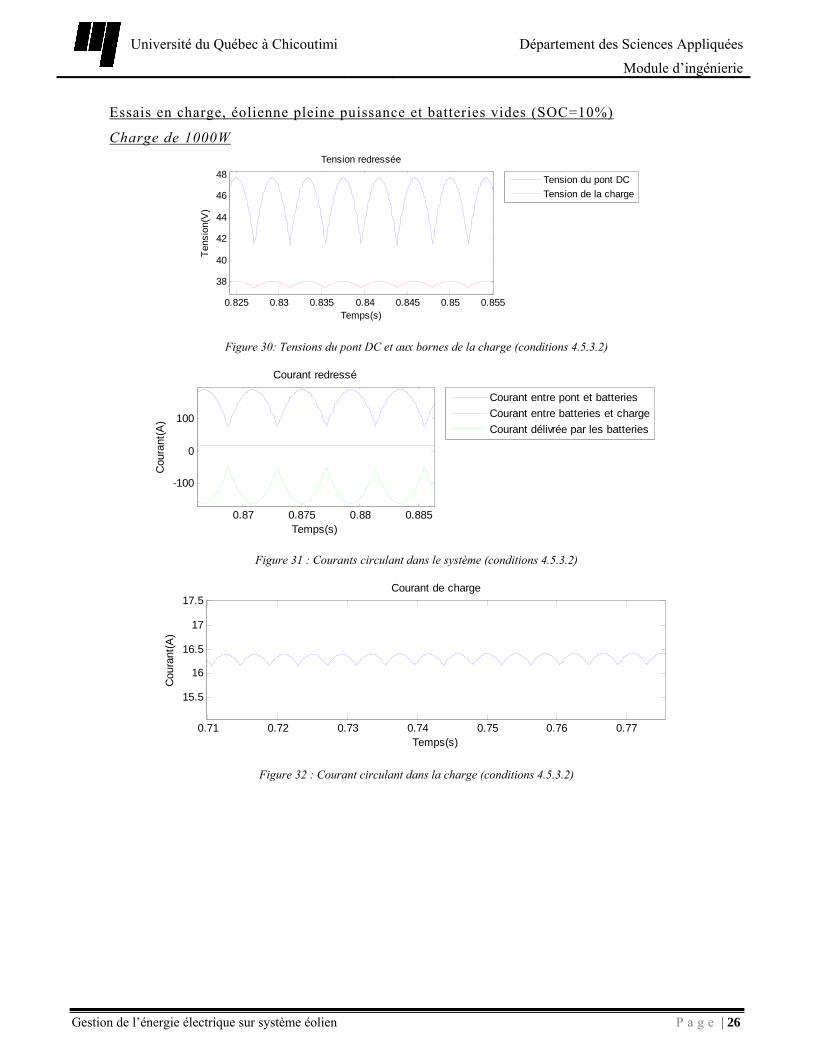
Essais en charge, éolienne pleine puissance et batteries vides (SOC=10%)
Charge de 1000W
Figure 30: Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.2)
Figure 31 : Courants circulant dans le système (conditions 4.5.3.2)
Figure 32 : Courant circulant dans la charge (conditions 4.5.3.2)
0.825 0.83 0.835 0.84 0.845 0.85 0.855
38
40
42
44
46
48Tension redressée
Temps(s)
Tens
ion(
V)
Tension du pont DCTension de la charge
0.87 0.875 0.88 0.885
-100
0
100
Courant redressé
Temps(s)
Cou
rant
(A)
Courant entre pont et batteriesCourant entre batteries et chargeCourant délivrée par les batteries
0.71 0.72 0.73 0.74 0.75 0.76 0.77
15.5
16
16.5
17
17.5Courant de charge
Temps(s)
Cou
rant
(A)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 27
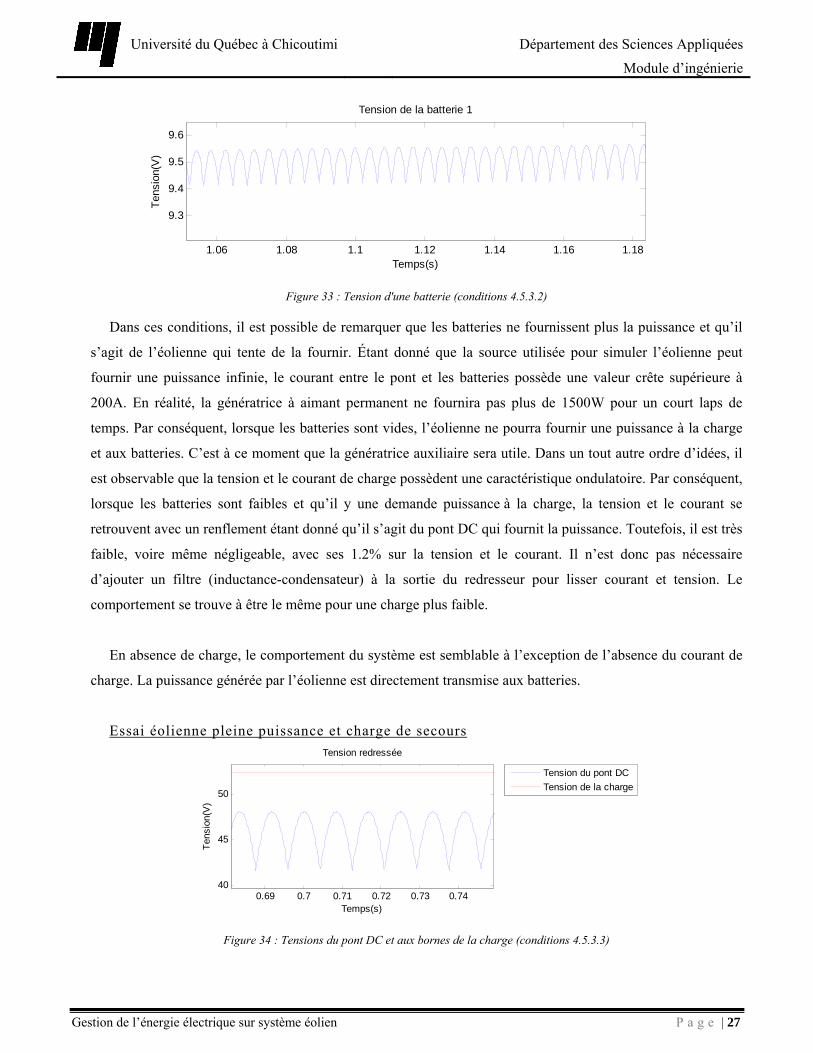
Figure 33 : Tension d'une batterie (conditions 4.5.3.2)
Dans ces conditions, il est possible de remarquer que les batteries ne fournissent plus la puissance et qu’il
s’agit de l’éolienne qui tente de la fournir. Étant donné que la source utilisée pour simuler l’éolienne peut
fournir une puissance infinie, le courant entre le pont et les batteries possède une valeur crête supérieure à
200A. En réalité, la génératrice à aimant permanent ne fournira pas plus de 1500W pour un court laps de
temps. Par conséquent, lorsque les batteries sont vides, l’éolienne ne pourra fournir une puissance à la charge
et aux batteries. C’est à ce moment que la génératrice auxiliaire sera utile. Dans un tout autre ordre d’idées, il
est observable que la tension et le courant de charge possèdent une caractéristique ondulatoire. Par conséquent,
lorsque les batteries sont faibles et qu’il y une demande puissance à la charge, la tension et le courant se
retrouvent avec un renflement étant donné qu’il s’agit du pont DC qui fournit la puissance. Toutefois, il est très
faible, voire même négligeable, avec ses 1.2% sur la tension et le courant. Il n’est donc pas nécessaire
d’ajouter un filtre (inductance-condensateur) à la sortie du redresseur pour lisser courant et tension. Le
comportement se trouve à être le même pour une charge plus faible.
En absence de charge, le comportement du système est semblable à l’exception de l’absence du courant de
charge. La puissance générée par l’éolienne est directement transmise aux batteries.
Essai éolienne pleine puissance et charge de secours
Figure 34 : Tensions du pont DC et aux bornes de la charge (conditions 4.5.3.3)
1.06 1.08 1.1 1.12 1.14 1.16 1.18
9.3
9.4
9.5
9.6
Tension de la batterie 1
Temps(s)
Tens
ion(
V)
0.69 0.7 0.71 0.72 0.73 0.7440
45
50
Tension redressée
Temps(s)
Tens
ion(
V)
Tension du pont DCTension de la charge
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 28
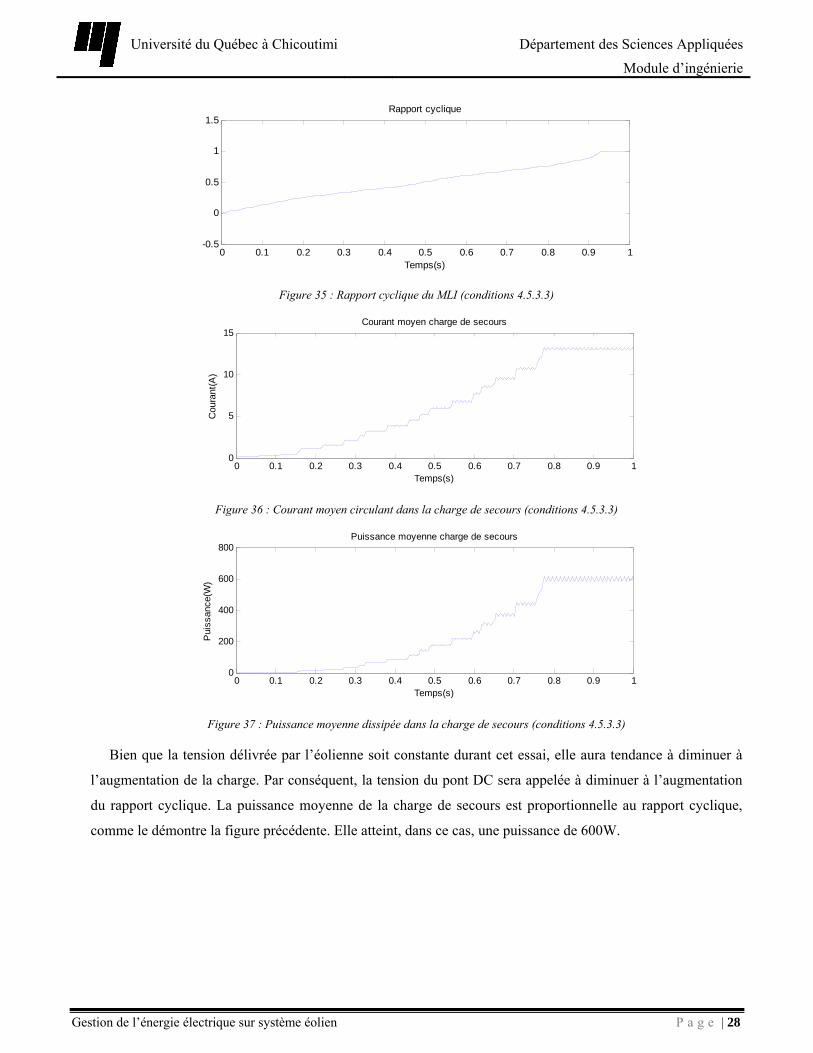
Figure 35 : Rapport cyclique du MLI (conditions 4.5.3.3)
Figure 36 : Courant moyen circulant dans la charge de secours (conditions 4.5.3.3)
Figure 37 : Puissance moyenne dissipée dans la charge de secours (conditions 4.5.3.3)
Bien que la tension délivrée par l’éolienne soit constante durant cet essai, elle aura tendance à diminuer à
l’augmentation de la charge. Par conséquent, la tension du pont DC sera appelée à diminuer à l’augmentation
du rapport cyclique. La puissance moyenne de la charge de secours est proportionnelle au rapport cyclique,
comme le démontre la figure précédente. Elle atteint, dans ce cas, une puissance de 600W.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
1
1.5Rapport cyclique
Temps(s)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15Courant moyen charge de secours
Temps(s)
Cou
rant
(A)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
200
400
600
800Puissance moyenne charge de secours
Temps(s)
Pui
ssan
ce(W
)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 29
Sommaire des essais sur simulateur
Suite à ces essais sur simulateur MATLAB : Simulink, il a été possible de constater que l’ajout de filtre à la
sortie du redresseur afin de lisser le courant et la tension n’est pas nécessaire étant donné que les batteries font
l’interface entre le générateur et la charge. En d’autres mots, les batteries fournissent la puissance à la charge et
l’éolienne fournit la puissance aux batteries. Donc si l’éolienne n’est pas à sa pleine capacité, les batteries se
déchargeront plus rapidement. Si ces dernières sont vides, la génératrice sera incapable de fournir la puissance
demandée par la charge et celle demandée par les batteries. Alors, l’ajout d’une source d’énergie auxiliaire
permettra de fournir une puissance à la charge malgré l’absence de vent.
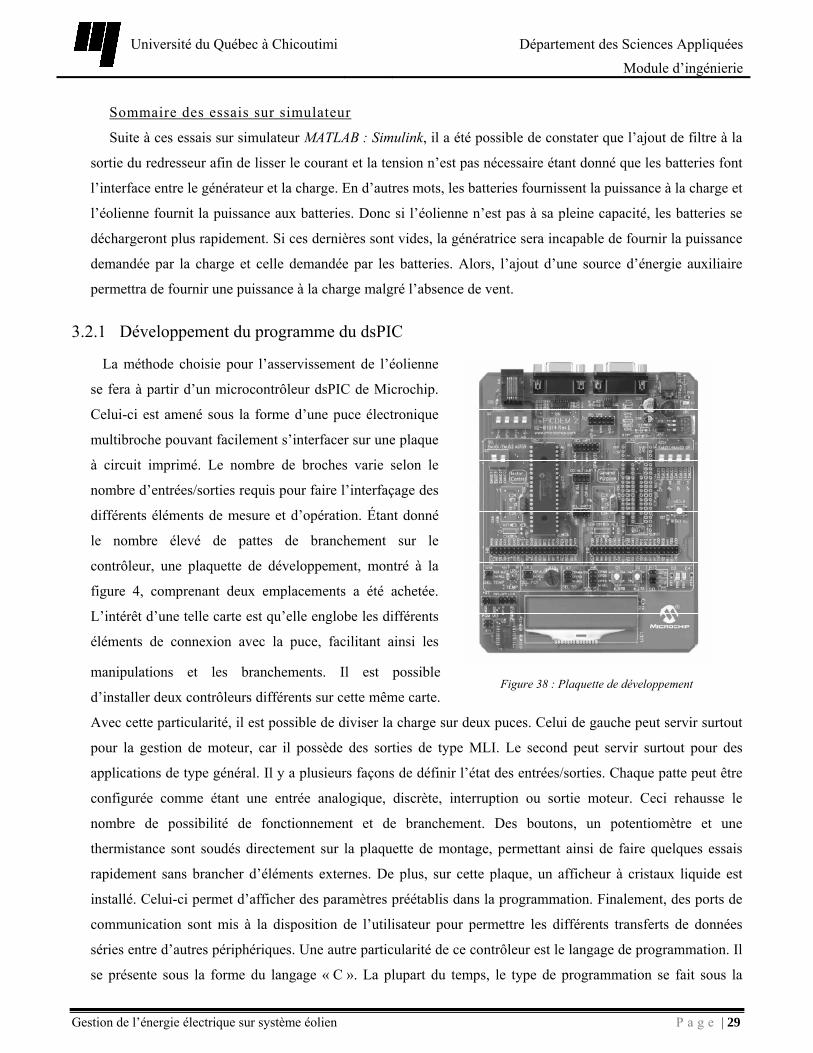
3.2.1 Développement du programme du dsPIC
La méthode choisie pour l’asservissement de l’éolienne
se fera à partir d’un microcontrôleur dsPIC de Microchip.
Celui-ci est amené sous la forme d’une puce électronique
multibroche pouvant facilement s’interfacer sur une plaque
à circuit imprimé. Le nombre de broches varie selon le
nombre d’entrées/sorties requis pour faire l’interfaçage des
différents éléments de mesure et d’opération. Étant donné
le nombre élevé de pattes de branchement sur le
contrôleur, une plaquette de développement, montré à la
figure 4, comprenant deux emplacements a été achetée.
L’intérêt d’une telle carte est qu’elle englobe les différents
éléments de connexion avec la puce, facilitant ainsi les
manipulations et les branchements. Il est possible
d’installer deux contrôleurs différents sur cette même carte.
Avec cette particularité, il est possible de diviser la charge sur deux puces. Celui de gauche peut servir surtout
pour la gestion de moteur, car il possède des sorties de type MLI. Le second peut servir surtout pour des
applications de type général. Il y a plusieurs façons de définir l’état des entrées/sorties. Chaque patte peut être
configurée comme étant une entrée analogique, discrète, interruption ou sortie moteur. Ceci rehausse le
nombre de possibilité de fonctionnement et de branchement. Des boutons, un potentiomètre et une
thermistance sont soudés directement sur la plaquette de montage, permettant ainsi de faire quelques essais
rapidement sans brancher d’éléments externes. De plus, sur cette plaque, un afficheur à cristaux liquide est
installé. Celui-ci permet d’afficher des paramètres préétablis dans la programmation. Finalement, des ports de
communication sont mis à la disposition de l’utilisateur pour permettre les différents transferts de données
séries entre d’autres périphériques. Une autre particularité de ce contrôleur est le langage de programmation. Il
se présente sous la forme du langage « C ». La plupart du temps, le type de programmation se fait sous la
Figure 38 : Plaquette de développement
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 30
forme de code assembleur, plus complexe et moins connu par la plupart des utilisateurs. Le langage « C », au
premier coup d’œil, est plus facile et convivial à programmer.
3.3 Éléments de conception
3.3.1 Schématique de câblage, unifilaire et schéma de disposition
Tout d’abord, la schématique de câblage global présenté dans l’annexe A comprend toutes les composantes
du système final :
• Onduleur
• Disjoncteurs
• Diodes
• Relais
Le dimensionnement de toutes ces composantes sera présenté dans les points suivants.
Un unifilaire de tous les éléments ainsi qu’une schématique de câblage «contrôle» sont également fournis
dans l’annexe A.
3.3.2 Dimensionnement des composantes physiques
3.3.2.1 DIMENSIONNEMENT DES CABLES
Premièrement, le dimensionnement des câbles d’alimentation est une partie très importante pour le meilleur
transfert de puissance possible ainsi que pour une sécurité optimale. En effet, les câbles mal dimensionnés
chauffent et limitent le passage du courant, un peu comme une résistance.
L’équation suivante est formulée avec la valeur de la puissance maximale de charge et sa tension
correspondante. Ces paramètres ont été calculés dans le pire des cas pour que les câbles puissent soutenir ces
situations. À une telle puissance, la tension minimale sera de 56V. La tension minimale est prise pour donner
un courant maximal. Le courant délivré par l’alternateur à aimants permanents est calculé selon la relation de
courant d’un redresseur en pont triphasé à diodes.
,max ,1500 226.8 ; 21.88
56 3occ s eff occWI A I I A
V= = = =
• Éolienne
• Pont de diodes triphasé
• Résistance à grande puissance pilotée
• Banc de batteries
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 31
Selon l’article 28-106 du code canadien de l’électricité, "les conducteurs de dérivation alimentant un
moteur utilisé en service continu doivent avoir un courant admissible d’au moins 125% du courant nominal à
pleine charge du moteur".
Câble d’alimentation du pont triphasé
1.25 21.88 27.35A× =
Selon le tableau 2 ou le tableau 4: #10/3 type RW90 Cu ou #8/3 Al RW90 (prendre le moins cher)
Ce câble a un courant admissible de 30A
Câble de distribution de la tension continue
1.25 26.8 33.50A× = :
#8/3 type RW90 Cu ou #6/3 Al RW90
Ce câble a un courant admissible de 40A
Câble d’alimentation de la résistance
1500 20.73.5
1.25 20.7 25.9
PI AR
A A
= = =
× =
#10/3 type RW90 Cu ou #8/3 Al RW90
Ce câble a un courant admissible de 30A
3.3.2.2 DIMENSIONNEMENT DES PROTECTIONS
Selon l’article 14-104 du code canadien de l’électricité, "le courant nominal ou réglage des dispositifs de
protection contre les surintensités ne doit pas être supérieur au courant admissible des conducteurs ou de
l‘appareillage qu’il protège".
Dans la dérivation de courant continu, les conducteurs sont de #8 en cuivre. Ces conducteurs ont un courant
admissible de 40A.
Les dispositifs de protection ont été finalement placés du côté du pont en courant continu, car, en cas de
défaut, l’éolienne aurait été délestée de toutes charges et de tout contrôle. Cela peut être très dangereux lors de
vents violents, car celle-ci ne rencontrerait aucune résistance.
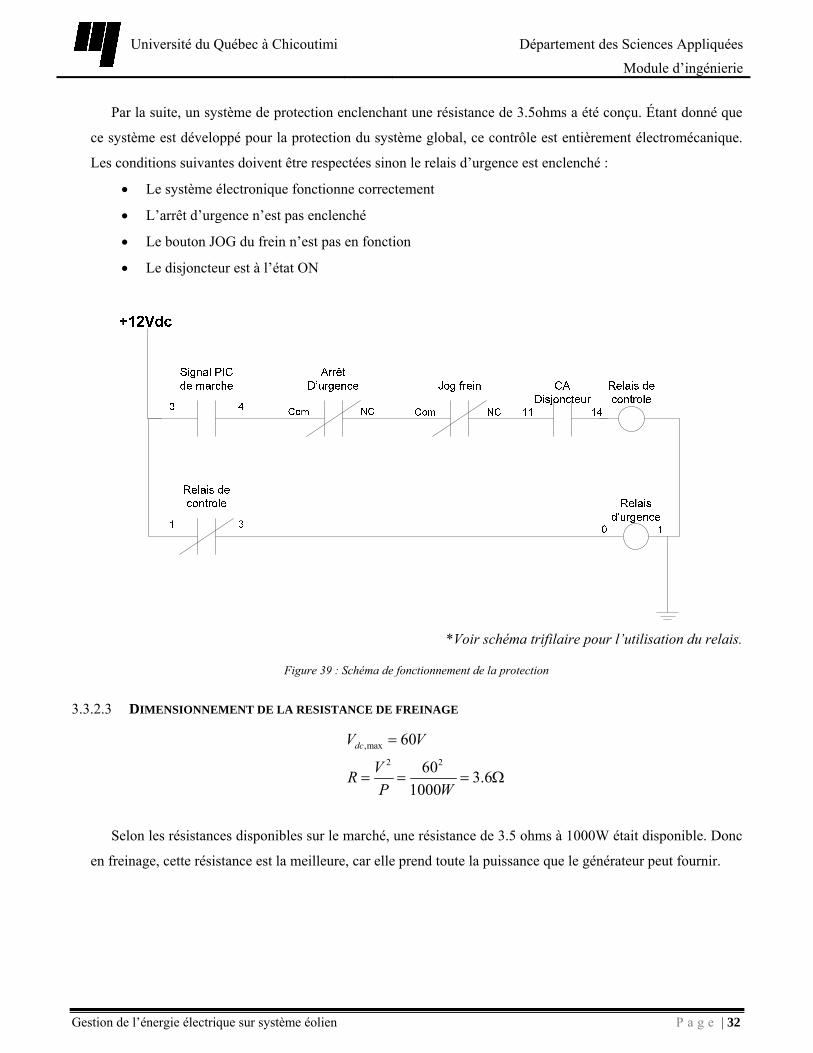
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 32
Par la suite, un système de protection enclenchant une résistance de 3.5ohms a été conçu. Étant donné que
ce système est développé pour la protection du système global, ce contrôle est entièrement électromécanique.
Les conditions suivantes doivent être respectées sinon le relais d’urgence est enclenché :
• Le système électronique fonctionne correctement
• L’arrêt d’urgence n’est pas enclenché
• Le bouton JOG du frein n’est pas en fonction
• Le disjoncteur est à l’état ON
*Voir schéma trifilaire pour l’utilisation du relais.
Figure 39 : Schéma de fonctionnement de la protection
3.3.2.3 DIMENSIONNEMENT DE LA RESISTANCE DE FREINAGE
,max
2 2
60
60 3.61000
dcV V
VRP W
=
= = = Ω
Selon les résistances disponibles sur le marché, une résistance de 3.5 ohms à 1000W était disponible. Donc
en freinage, cette résistance est la meilleure, car elle prend toute la puissance que le générateur peut fournir.
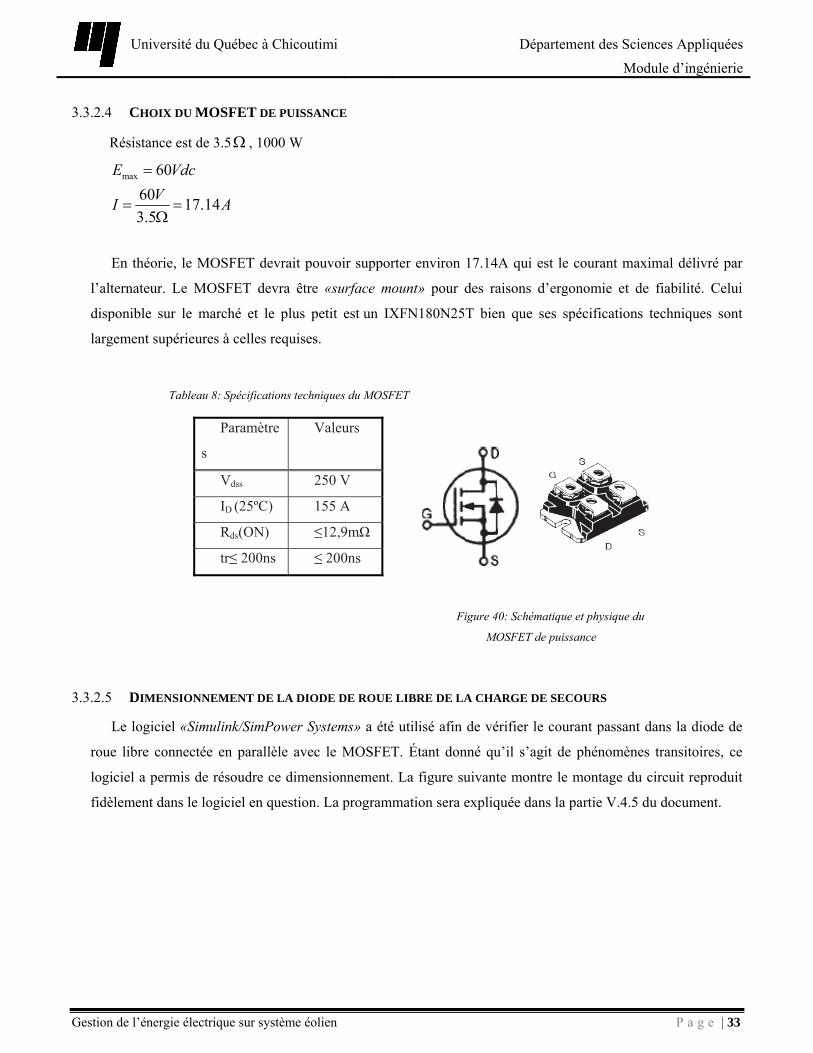
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 33
3.3.2.4 CHOIX DU MOSFET DE PUISSANCE
Résistance est de 3.5Ω , 1000 W
max 6060 17.143.5
E VdcVI A
=
= =Ω
En théorie, le MOSFET devrait pouvoir supporter environ 17.14A qui est le courant maximal délivré par
l’alternateur. Le MOSFET devra être «surface mount» pour des raisons d’ergonomie et de fiabilité. Celui
disponible sur le marché et le plus petit est un IXFN180N25T bien que ses spécifications techniques sont
largement supérieures à celles requises.
Tableau 8: Spécifications techniques du MOSFET
Paramètre
s
Valeurs
Vdss 250 V
ID (25ºC) 155 A
Rds(ON) ≤12,9mΩ
tr≤ 200ns ≤ 200ns
3.3.2.5 DIMENSIONNEMENT DE LA DIODE DE ROUE LIBRE DE LA CHARGE DE SECOURS
Le logiciel «Simulink/SimPower Systems» a été utilisé afin de vérifier le courant passant dans la diode de
roue libre connectée en parallèle avec le MOSFET. Étant donné qu’il s’agit de phénomènes transitoires, ce
logiciel a permis de résoudre ce dimensionnement. La figure suivante montre le montage du circuit reproduit
fidèlement dans le logiciel en question. La programmation sera expliquée dans la partie V.4.5 du document.
Figure 40: Schématique et physique du
MOSFET de puissance
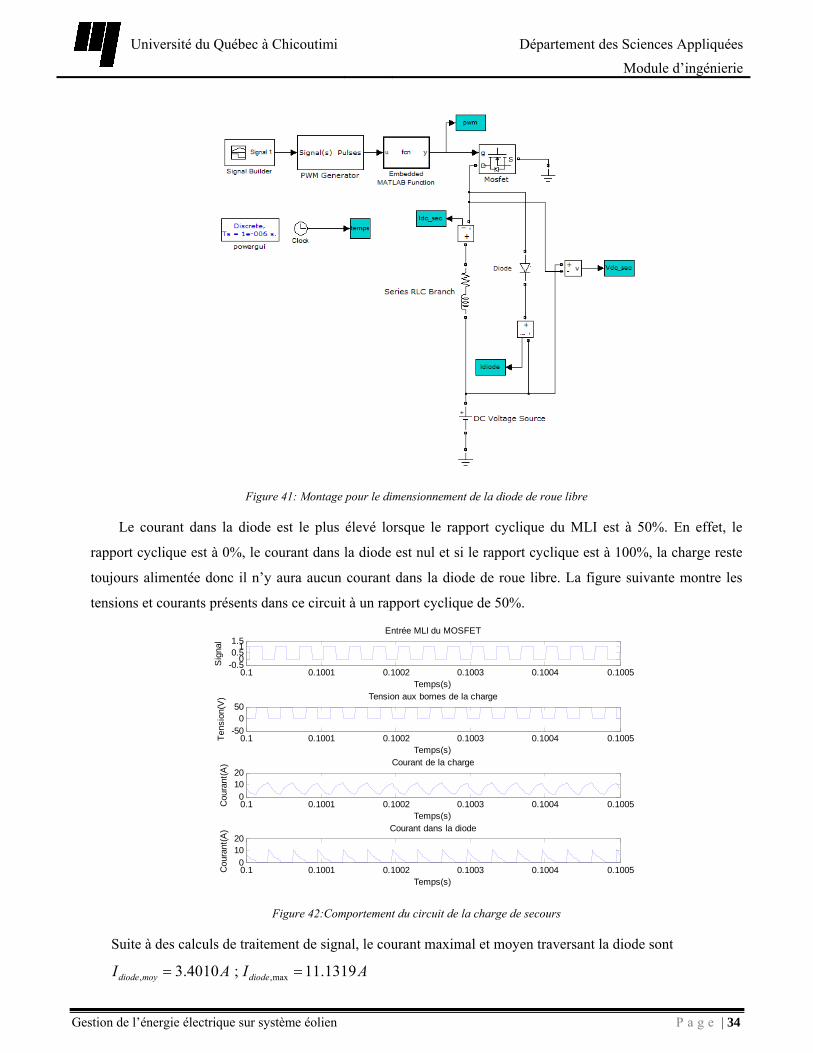
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 34
Figure 41: Montage pour le dimensionnement de la diode de roue libre
Le courant dans la diode est le plus élevé lorsque le rapport cyclique du MLI est à 50%. En effet, le
rapport cyclique est à 0%, le courant dans la diode est nul et si le rapport cyclique est à 100%, la charge reste
toujours alimentée donc il n’y aura aucun courant dans la diode de roue libre. La figure suivante montre les
tensions et courants présents dans ce circuit à un rapport cyclique de 50%.
Figure 42:Comportement du circuit de la charge de secours
Suite à des calculs de traitement de signal, le courant maximal et moyen traversant la diode sont
, ,max3.4010 ; 11.1319diode moy diodeI A I A= =
0.1 0.1001 0.1002 0.1003 0.1004 0.1005-0.5
00.5
11.5Entrée MLI du MOSFET
Sig
nal
Temps(s)
0.1 0.1001 0.1002 0.1003 0.1004 0.1005-50
050
Tension aux bornes de la charge
Tens
ion(
V)
Temps(s)
0.1 0.1001 0.1002 0.1003 0.1004 0.10050
1020
Courant de la charge
Cou
rant
(A)
Temps(s)
0.1 0.1001 0.1002 0.1003 0.1004 0.10050
1020
Courant dans la diode
Cou
rant
(A)
Temps(s)
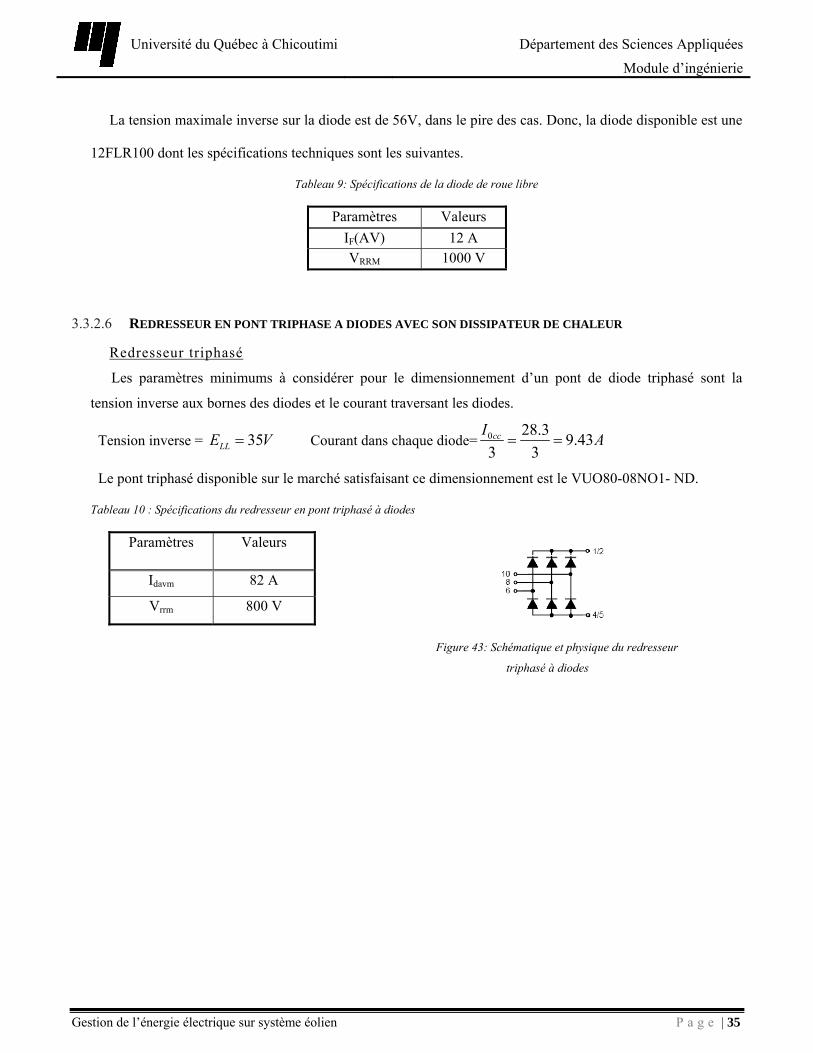
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 35
La tension maximale inverse sur la diode est de 56V, dans le pire des cas. Donc, la diode disponible est une
12FLR100 dont les spécifications techniques sont les suivantes.
Tableau 9: Spécifications de la diode de roue libre
Paramètres Valeurs IF(AV) 12 A VRRM 1000 V
3.3.2.6 REDRESSEUR EN PONT TRIPHASE A DIODES AVEC SON DISSIPATEUR DE CHALEUR
Redresseur triphasé
Les paramètres minimums à considérer pour le dimensionnement d’un pont de diode triphasé sont la
tension inverse aux bornes des diodes et le courant traversant les diodes.
Tension inverse = 35LLE V= Courant dans chaque diode= 0 28.3 9.433 3
ccI A= =
Le pont triphasé disponible sur le marché satisfaisant ce dimensionnement est le VUO80-08NO1- ND.
Tableau 10 : Spécifications du redresseur en pont triphasé à diodes
Paramètres Valeurs
Idavm 82 A
Vrrm 800 V
Figure 43: Schématique et physique du redresseur
triphasé à diodes

Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 36
Dissipateur de chaleur
Selon la dissipation de chaleur provoquée par le redresseur triphasé illustré à la figure suivante, il est
possible de remarquer que la puissance dissipée dans le pont est de 50W à 30A. À 30A, le pont peut opérer à
une température de 130oC
Selon la figure de droite, le dissipateur de chaleur requis
pour le redresseur triphasé est un 421A digikey 345-1047-ND.
Avec ce type de dissipateur, lors d’une perte de puissance de
50W, il y a augmentation de 550C par rapport à la température
ambiante. Par exemple, dans les pires cas au Québec, s’il fait
400C à l’extérieur, le redresseur sera à une température de
950C. Il n’y aura pas de problème, car celui-ci, à 30A, peut
opérer à une température de 1300C
3.3.2.7 DIMENSIONNEMENT DES DIODES DE PUISSANCE
Les diodes ont été calibrées selon le courant admissible maximal dans les câbles qui est de 40A. Les diodes
choisies sont du 1N1184A où le courant admissible est de 40A et la tension inverse maximale est de 100V.
Cette tension est amplement suffisante pour une tension maximale du système qui est de 56V.
Figure 44:Puissance dissipe du redresseur en fonction du courant
Figure 45: Température tolérée du
redresseur en fonction du courant traversé
Figure 46: Choix du dissipateur de chaleur
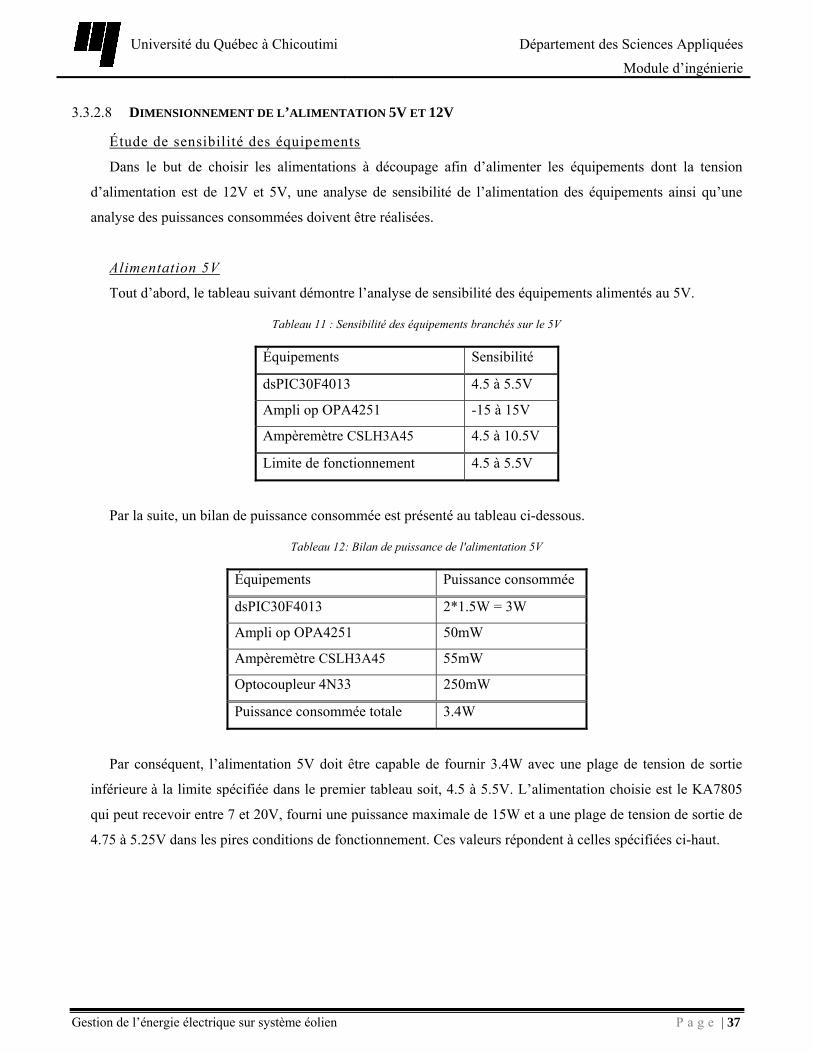
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 37
3.3.2.8 DIMENSIONNEMENT DE L’ALIMENTATION 5V ET 12V
Étude de sensibilité des équipements
Dans le but de choisir les alimentations à découpage afin d’alimenter les équipements dont la tension
d’alimentation est de 12V et 5V, une analyse de sensibilité de l’alimentation des équipements ainsi qu’une
analyse des puissances consommées doivent être réalisées.
Alimentation 5V
Tout d’abord, le tableau suivant démontre l’analyse de sensibilité des équipements alimentés au 5V.
Tableau 11 : Sensibilité des équipements branchés sur le 5V
Équipements Sensibilité
dsPIC30F4013 4.5 à 5.5V
Ampli op OPA4251 -15 à 15V
Ampèremètre CSLH3A45 4.5 à 10.5V
Limite de fonctionnement 4.5 à 5.5V
Par la suite, un bilan de puissance consommée est présenté au tableau ci-dessous.
Tableau 12: Bilan de puissance de l'alimentation 5V
Équipements Puissance consommée
dsPIC30F4013 2*1.5W = 3W
Ampli op OPA4251 50mW
Ampèremètre CSLH3A45 55mW
Optocoupleur 4N33 250mW
Puissance consommée totale 3.4W
Par conséquent, l’alimentation 5V doit être capable de fournir 3.4W avec une plage de tension de sortie
inférieure à la limite spécifiée dans le premier tableau soit, 4.5 à 5.5V. L’alimentation choisie est le KA7805
qui peut recevoir entre 7 et 20V, fourni une puissance maximale de 15W et a une plage de tension de sortie de
4.75 à 5.25V dans les pires conditions de fonctionnement. Ces valeurs répondent à celles spécifiées ci-haut.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 38
Alimentation 12V
Tableau 13: Sensibilité des équipements branchés sur le 12V
Équipements Sensibilité
Pilotage du MOSFET TC4420 4.5 à 18V
Optocoupleur TLP2200 4.5 à 20V
Relais LY2 11.4 à 12.6V
Relais Z1051ND 10.8V à 13.2V
Alimentation 5V 7V à 20V
Limite de fonctionnement 11.4 à 12.6V
Le tableau suivant présente le bilan de puissance consommée des équipements branchés sur 12V.
Tableau 14 : Bilan de puissance de l'alimentation 12V
Équipements Puissance consommée
Pilotage du MOSFET TC4420 730mW
Optocoupleur TLP2200 25mW
Relais LY2 0,9W
Relais Z1051ND 1,9W*2=3.8W
Alimentation 5V 3.4W
Puissance consommée totale 8.9W
Remarques : le multiplicateur 2 est présent pour illustrer l’ajout d’un troisième contacteur pour l’onduleur.
Suite à ces analyses, l’alimentation 12V doit être dimensionnée pour fournir une puissance minimale de 9W
dans une plage de tension de sortie inférieure à celle spécifiée dans la limite
de fonctionnement (11.4 à 12.6V). L’alimentation choisir est une
alimentation à découpage LW020B871 qui peut fournir une puissance de
20W dans une plage de tension de sortie de 11.64 à 12.36V. Ces
spécifications satisfont celles demandées ci-haut.
Figure 47 : Régulateur de
tension 48V- 12V
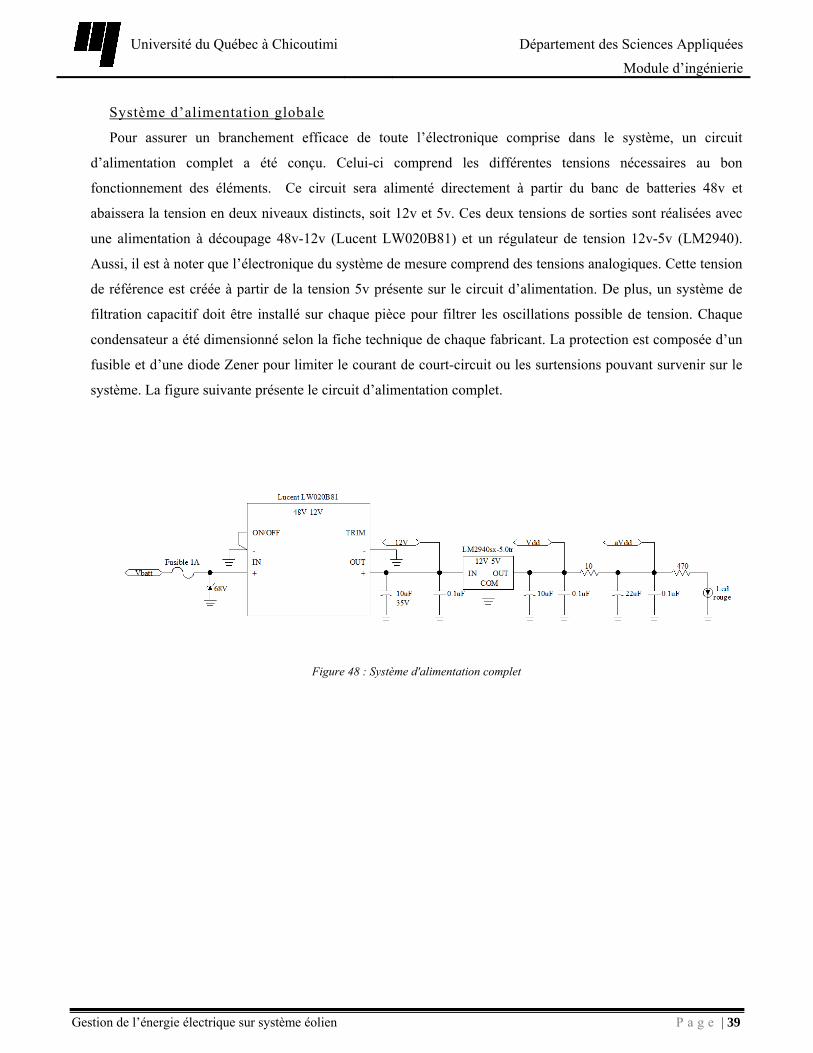
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 39
Système d’alimentation globale
Pour assurer un branchement efficace de toute l’électronique comprise dans le système, un circuit
d’alimentation complet a été conçu. Celui-ci comprend les différentes tensions nécessaires au bon
fonctionnement des éléments. Ce circuit sera alimenté directement à partir du banc de batteries 48v et
abaissera la tension en deux niveaux distincts, soit 12v et 5v. Ces deux tensions de sorties sont réalisées avec
une alimentation à découpage 48v-12v (Lucent LW020B81) et un régulateur de tension 12v-5v (LM2940).
Aussi, il est à noter que l’électronique du système de mesure comprend des tensions analogiques. Cette tension
de référence est créée à partir de la tension 5v présente sur le circuit d’alimentation. De plus, un système de
filtration capacitif doit être installé sur chaque pièce pour filtrer les oscillations possible de tension. Chaque
condensateur a été dimensionné selon la fiche technique de chaque fabricant. La protection est composée d’un
fusible et d’une diode Zener pour limiter le courant de court-circuit ou les surtensions pouvant survenir sur le
système. La figure suivante présente le circuit d’alimentation complet.
Figure 48 : Système d'alimentation complet
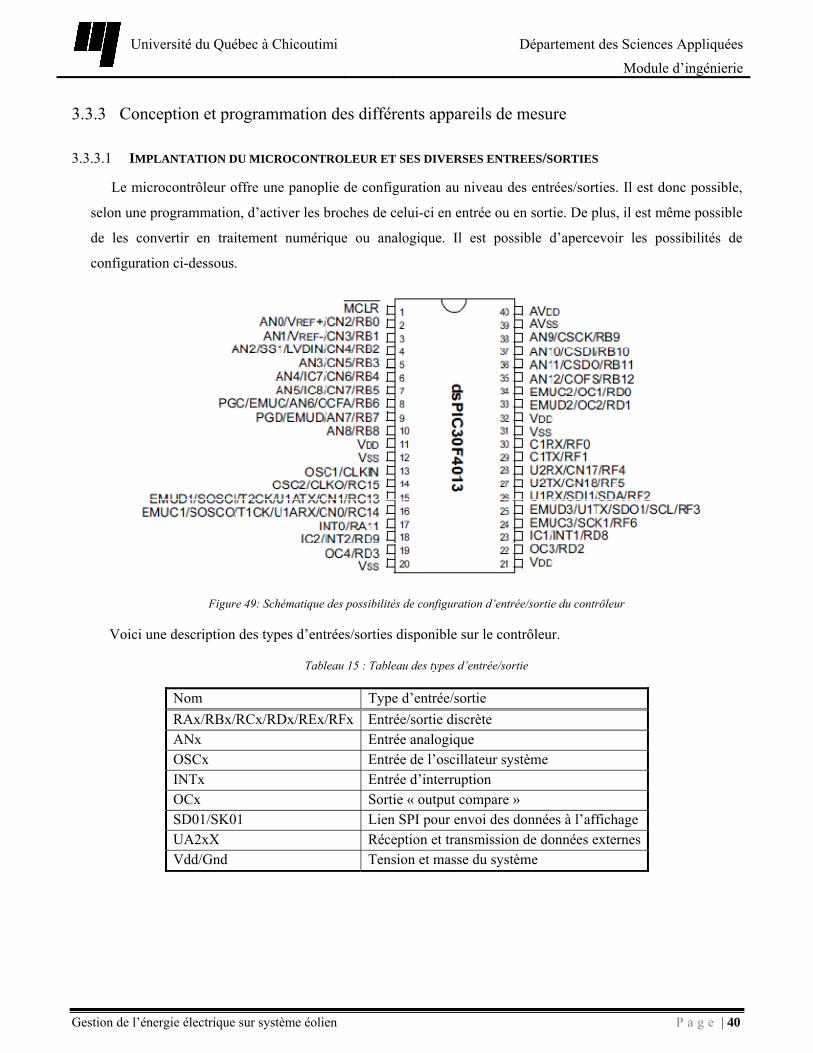
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 40
3.3.3 Conception et programmation des différents appareils de mesure
3.3.3.1 IMPLANTATION DU MICROCONTROLEUR ET SES DIVERSES ENTREES/SORTIES
Le microcontrôleur offre une panoplie de configuration au niveau des entrées/sorties. Il est donc possible,
selon une programmation, d’activer les broches de celui-ci en entrée ou en sortie. De plus, il est même possible
de les convertir en traitement numérique ou analogique. Il est possible d’apercevoir les possibilités de
configuration ci-dessous.
Figure 49: Schématique des possibilités de configuration d’entrée/sortie du contrôleur
Voici une description des types d’entrées/sorties disponible sur le contrôleur.
Tableau 15 : Tableau des types d’entrée/sortie
Nom Type d’entrée/sortie RAx/RBx/RCx/RDx/REx/RFx Entrée/sortie discrète ANx Entrée analogique OSCx Entrée de l’oscillateur système INTx Entrée d’interruption OCx Sortie « output compare » SD01/SK01 Lien SPI pour envoi des données à l’affichage UA2xX Réception et transmission de données externes Vdd/Gnd Tension et masse du système
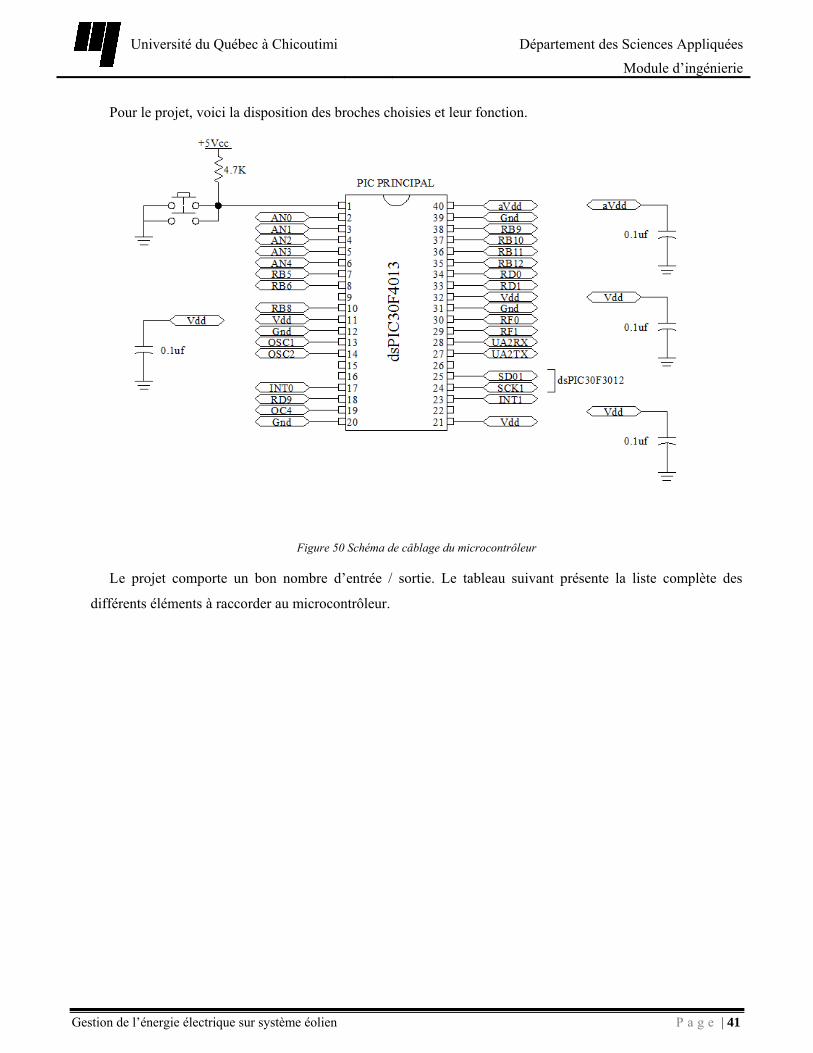
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 41
Pour le projet, voici la disposition des broches choisies et leur fonction.
Figure 50 Schéma de câblage du microcontrôleur
L e projet comporte un bon nombre d’entrée / sortie. Le tableau suivant présente la liste complète des
différents éléments à raccorder au microcontrôleur.
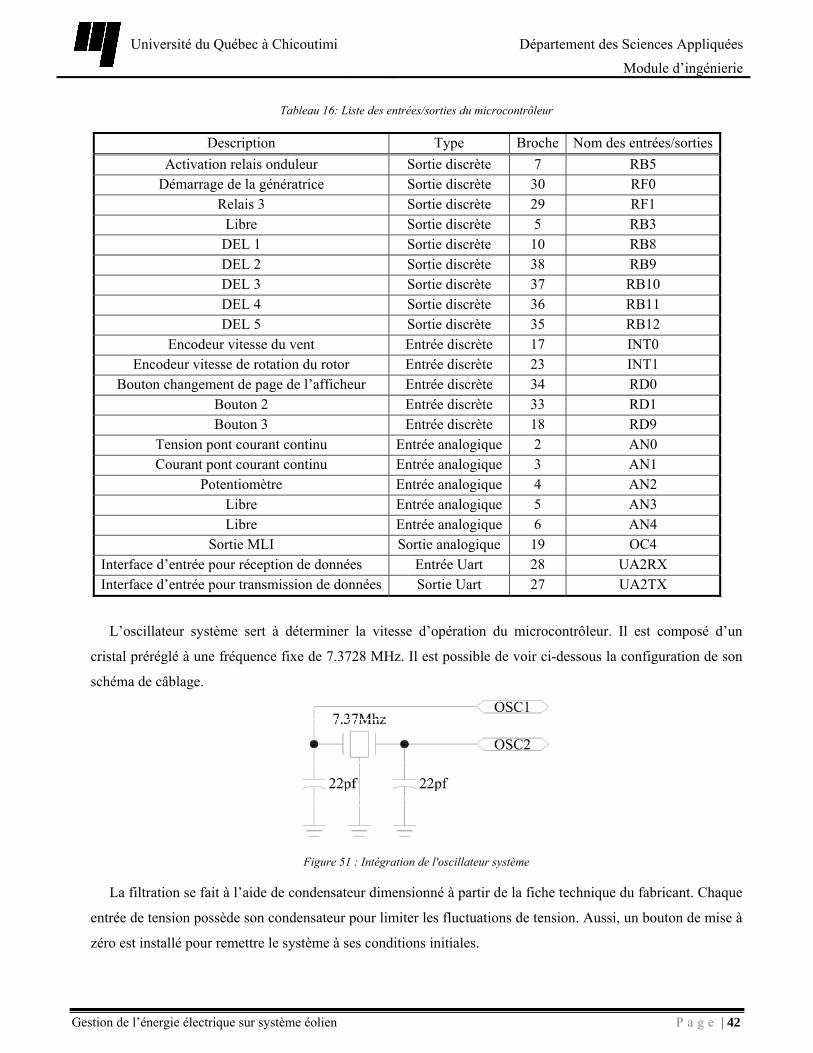
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 42
Tableau 16: Liste des entrées/sorties du microcontrôleur
Description Type Broche Nom des entrées/sortiesActivation relais onduleur Sortie discrète 7 RB5
Démarrage de la génératrice Sortie discrète 30 RF0 Relais 3 Sortie discrète 29 RF1
Libre Sortie discrète 5 RB3 DEL 1 Sortie discrète 10 RB8 DEL 2 Sortie discrète 38 RB9 DEL 3 Sortie discrète 37 RB10 DEL 4 Sortie discrète 36 RB11 DEL 5 Sortie discrète 35 RB12
Encodeur vitesse du vent Entrée discrète 17 INT0 Encodeur vitesse de rotation du rotor Entrée discrète 23 INT1
Bouton changement de page de l’afficheur Entrée discrète 34 RD0 Bouton 2 Entrée discrète 33 RD1 Bouton 3 Entrée discrète 18 RD9
Tension pont courant continu Entrée analogique 2 AN0 Courant pont courant continu Entrée analogique 3 AN1
Potentiomètre Entrée analogique 4 AN2 Libre Entrée analogique 5 AN3 Libre Entrée analogique 6 AN4
Sortie MLI Sortie analogique 19 OC4 Interface d’entrée pour réception de données Entrée Uart 28 UA2RX Interface d’entrée pour transmission de données Sortie Uart 27 UA2TX
L’oscillateur système sert à déterminer la vitesse d’opération du microcontrôleur. Il est composé d’un
cristal préréglé à une fréquence fixe de 7.3728 MHz. Il est possible de voir ci-dessous la configuration de son
schéma de câblage.
Figure 51 : Intégration de l'oscillateur système
La filtration se fait à l’aide de condensateur dimensionné à partir de la fiche technique du fabricant. Chaque
entrée de tension possède son condensateur pour limiter les fluctuations de tension. Aussi, un bouton de mise à
zéro est installé pour remettre le système à ses conditions initiales.
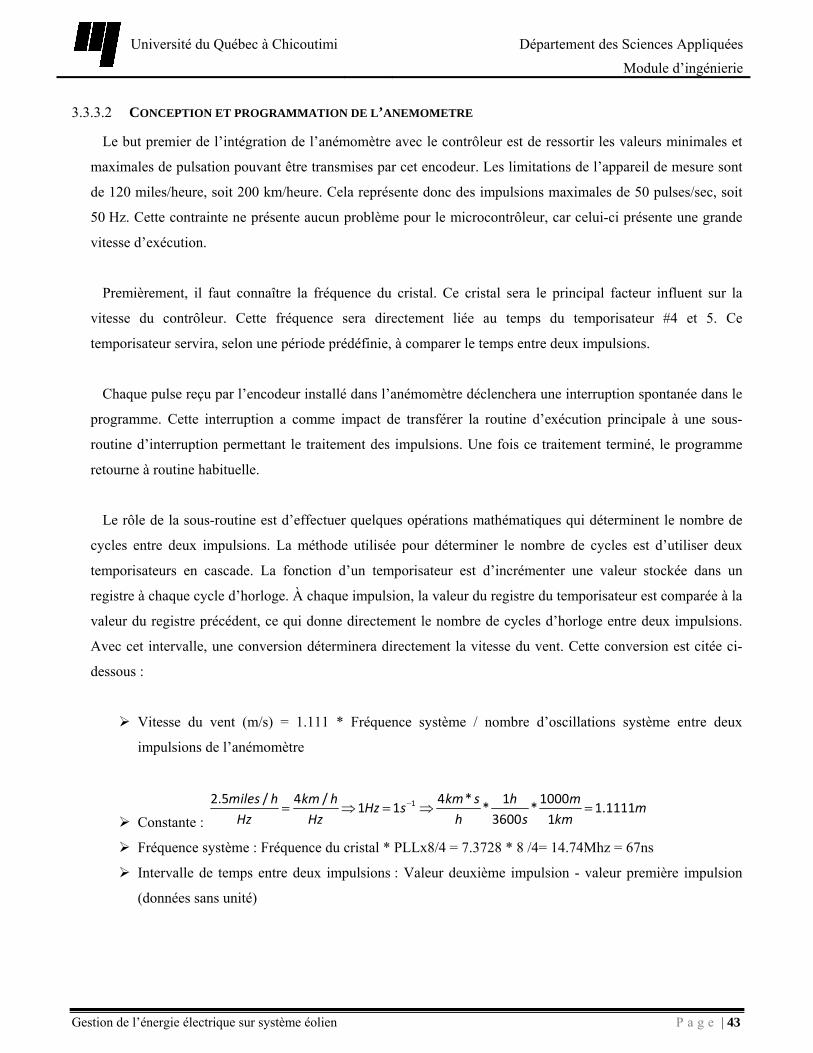
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 43
3.3.3.2 CONCEPTION ET PROGRAMMATION DE L’ANEMOMETRE
Le but premier de l’intégration de l’anémomètre avec le contrôleur est de ressortir les valeurs minimales et
maximales de pulsation pouvant être transmises par cet encodeur. Les limitations de l’appareil de mesure sont
de 120 miles/heure, soit 200 km/heure. Cela représente donc des impulsions maximales de 50 pulses/sec, soit
50 Hz. Cette contrainte ne présente aucun problème pour le microcontrôleur, car celui-ci présente une grande
vitesse d’exécution.
Premièrement, il faut connaître la fréquence du cristal. Ce cristal sera le principal facteur influent sur la
vitesse du contrôleur. Cette fréquence sera directement liée au temps du temporisateur #4 et 5. Ce
temporisateur servira, selon une période prédéfinie, à comparer le temps entre deux impulsions.
Chaque pulse reçu par l’encodeur installé dans l’anémomètre déclenchera une interruption spontanée dans le
programme. Cette interruption a comme impact de transférer la routine d’exécution principale à une sous-
routine d’interruption permettant le traitement des impulsions. Une fois ce traitement terminé, le programme
retourne à routine habituelle.
Le rôle de la sous-routine est d’effectuer quelques opérations mathématiques qui déterminent le nombre de
cycles entre deux impulsions. La méthode utilisée pour déterminer le nombre de cycles est d’utiliser deux
temporisateurs en cascade. La fonction d’un temporisateur est d’incrémenter une valeur stockée dans un
registre à chaque cycle d’horloge. À chaque impulsion, la valeur du registre du temporisateur est comparée à la
valeur du registre précédent, ce qui donne directement le nombre de cycles d’horloge entre deux impulsions.
Avec cet intervalle, une conversion déterminera directement la vitesse du vent. Cette conversion est citée ci-
dessous :
Vitesse du vent (m/s) = 1.111 * Fréquence système / nombre d’oscillations système entre deux
impulsions de l’anémomètre
Constante : 12.5 / 4 / 4 * 1 1000
1 1 * * 1.11113600 1
miles h km h km s h mHz s m
Hz Hz h s km−= ⇒ = ⇒ =
Fréquence système : Fréquence du cristal * PLLx8/4 = 7.3728 * 8 /4= 14.74Mhz = 67ns
Intervalle de temps entre deux impulsions : Valeur deuxième impulsion - valeur première impulsion
(données sans unité)
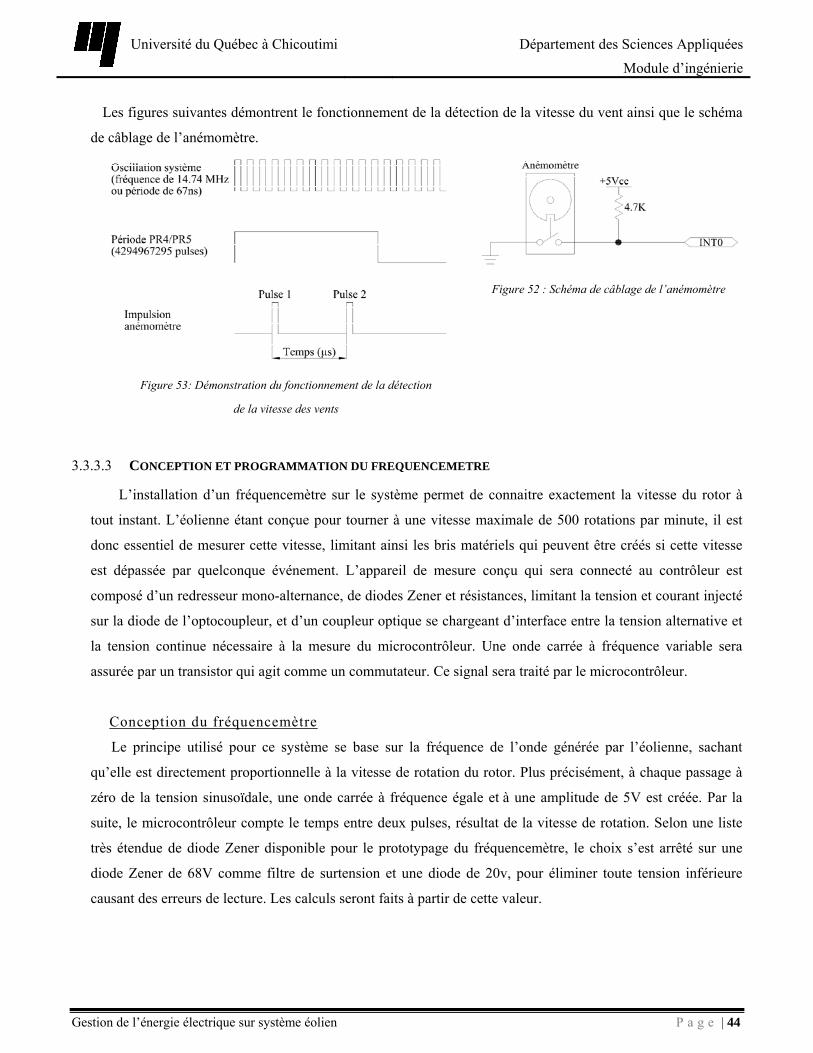
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 44
Les figures suivantes démontrent le fonctionnement de la détection de la vitesse du vent ainsi que le schéma
de câblage de l’anémomètre.
3.3.3.3 CONCEPTION ET PROGRAMMATION DU FREQUENCEMETRE
L’installation d’un fréquencemètre sur le système permet de connaitre exactement la vitesse du rotor à
tout instant. L’éolienne étant conçue pour tourner à une vitesse maximale de 500 rotations par minute, il est
donc essentiel de mesurer cette vitesse, limitant ainsi les bris matériels qui peuvent être créés si cette vitesse
est dépassée par quelconque événement. L’appareil de mesure conçu qui sera connecté au contrôleur est
composé d’un redresseur mono-alternance, de diodes Zener et résistances, limitant la tension et courant injecté
sur la diode de l’optocoupleur, et d’un coupleur optique se chargeant d’interface entre la tension alternative et
la tension continue nécessaire à la mesure du microcontrôleur. Une onde carrée à fréquence variable sera
assurée par un transistor qui agit comme un commutateur. Ce signal sera traité par le microcontrôleur.
Conception du fréquencemètre
Le principe utilisé pour ce système se base sur la fréquence de l’onde générée par l’éolienne, sachant
qu’elle est directement proportionnelle à la vitesse de rotation du rotor. Plus précisément, à chaque passage à
zéro de la tension sinusoïdale, une onde carrée à fréquence égale et à une amplitude de 5V est créée. Par la
suite, le microcontrôleur compte le temps entre deux pulses, résultat de la vitesse de rotation. Selon une liste
très étendue de diode Zener disponible pour le prototypage du fréquencemètre, le choix s’est arrêté sur une
diode Zener de 68V comme filtre de surtension et une diode de 20v, pour éliminer toute tension inférieure
causant des erreurs de lecture. Les calculs seront faits à partir de cette valeur.
Figure 53: Démonstration du fonctionnement de la détection
de la vitesse des vents
Figure 52 : Schéma de câblage de l’anémomètre
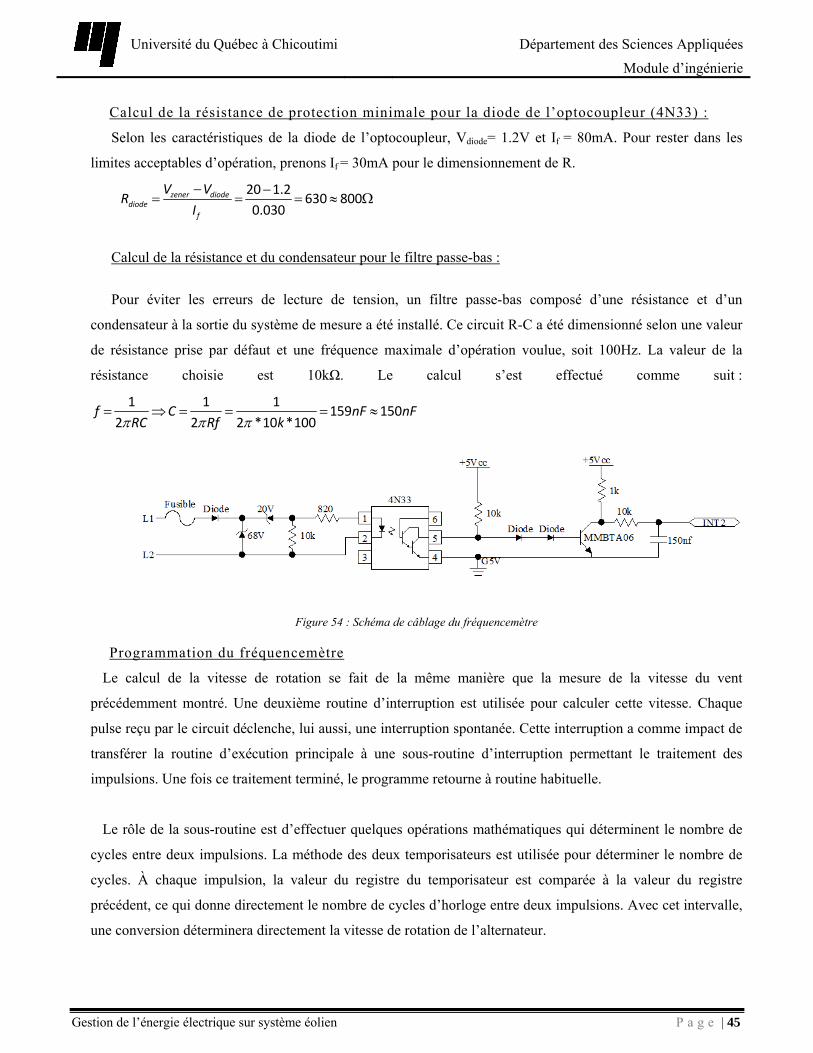
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 45
Calcul de la résistance de protection minimale pour la diode de l’optocoupleur (4N33) :
Selon les caractéristiques de la diode de l’optocoupleur, Vdiode= 1.2V et If = 80mA. Pour rester dans les
limites acceptables d’opération, prenons If = 30mA pour le dimensionnement de R.
20 1.2630 800
0.030zener diode
diodef
V VR
I− −
= = = ≈ Ω
Calcul de la résistance et du condensateur pour le filtre passe-bas :
Pour éviter les erreurs de lecture de tension, un filtre passe-bas composé d’une résistance et d’un
condensateur à la sortie du système de mesure a été installé. Ce circuit R-C a été dimensionné selon une valeur
de résistance prise par défaut et une fréquence maximale d’opération voulue, soit 100Hz. La valeur de la
résistance choisie est 10kΩ. Le calcul s’est effectué comme suit : 1 1 1
159 1502 2 2 *10 *100
f C nF nFRC Rf kπ π π
= ⇒ = = = ≈
Figure 54 : Schéma de câblage du fréquencemètre
Programmation du fréquencemètre
Le calcul de la vitesse de rotation se fait de la même manière que la mesure de la vitesse du vent
précédemment montré. Une deuxième routine d’interruption est utilisée pour calculer cette vitesse. Chaque
pulse reçu par le circuit déclenche, lui aussi, une interruption spontanée. Cette interruption a comme impact de
transférer la routine d’exécution principale à une sous-routine d’interruption permettant le traitement des
impulsions. Une fois ce traitement terminé, le programme retourne à routine habituelle.
Le rôle de la sous-routine est d’effectuer quelques opérations mathématiques qui déterminent le nombre de
cycles entre deux impulsions. La méthode des deux temporisateurs est utilisée pour déterminer le nombre de
cycles. À chaque impulsion, la valeur du registre du temporisateur est comparée à la valeur du registre
précédent, ce qui donne directement le nombre de cycles d’horloge entre deux impulsions. Avec cet intervalle,
une conversion déterminera directement la vitesse de rotation de l’alternateur.
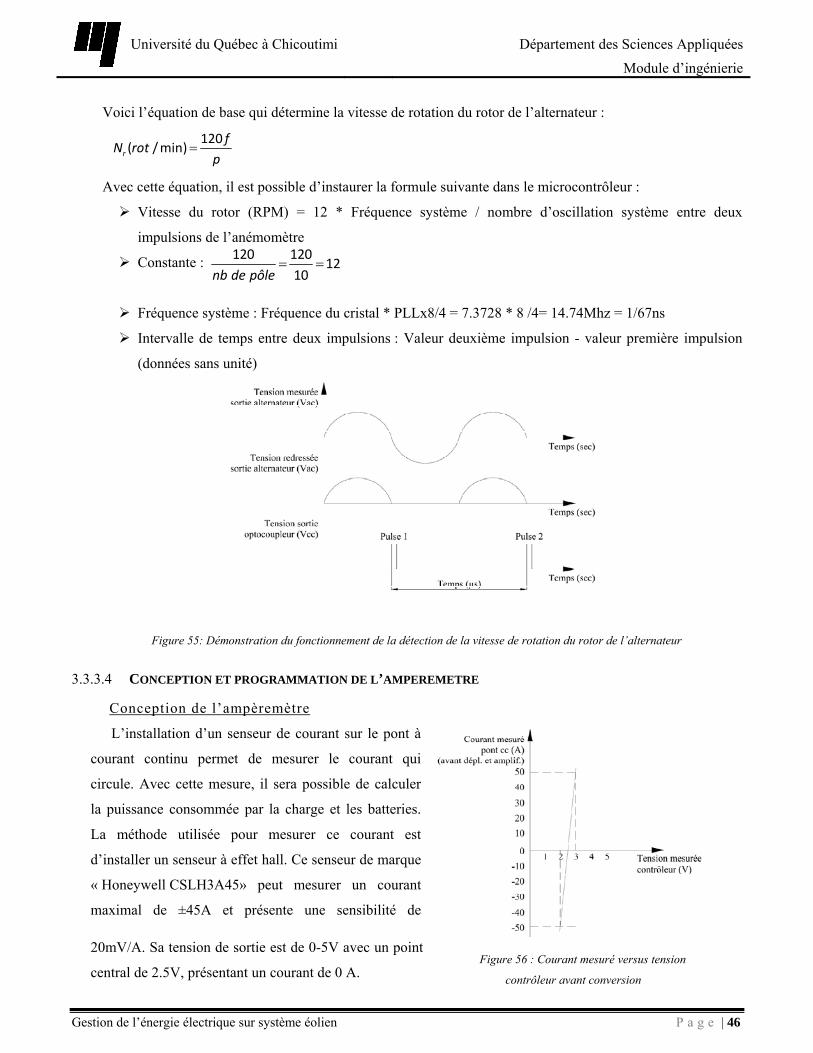
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 46
= =120 120
12 10nb de pôle
Voici l’équation de base qui détermine la vitesse de rotation du rotor de l’alternateur :
120( /min)r
fN rot
p=
Avec cette équation, il est possible d’instaurer la formule suivante dans le microcontrôleur :
Vitesse du rotor (RPM) = 12 * Fréquence système / nombre d’oscillation système entre deux
impulsions de l’anémomètre
Constante :
Fréquence système : Fréquence du cristal * PLLx8/4 = 7.3728 * 8 /4= 14.74Mhz = 1/67ns
Intervalle de temps entre deux impulsions : Valeur deuxième impulsion - valeur première impulsion
(données sans unité)
Figure 55: Démonstration du fonctionnement de la détection de la vitesse de rotation du rotor de l’alternateur
3.3.3.4 CONCEPTION ET PROGRAMMATION DE L’AMPEREMETRE
Conception de l’ampèremètre
L’installation d’un senseur de courant sur le pont à
courant continu permet de mesurer le courant qui
circule. Avec cette mesure, il sera possible de calculer
la puissance consommée par la charge et les batteries.
La méthode utilisée pour mesurer ce courant est
d’installer un senseur à effet hall. Ce senseur de marque
« Honeywell CSLH3A45» peut mesurer un courant
maximal de ±45A et présente une sensibilité de
20mV/A. Sa tension de sortie est de 0-5V avec un point
central de 2.5V, présentant un courant de 0 A. Figure 56 : Courant mesuré versus tension
contrôleur avant conversion
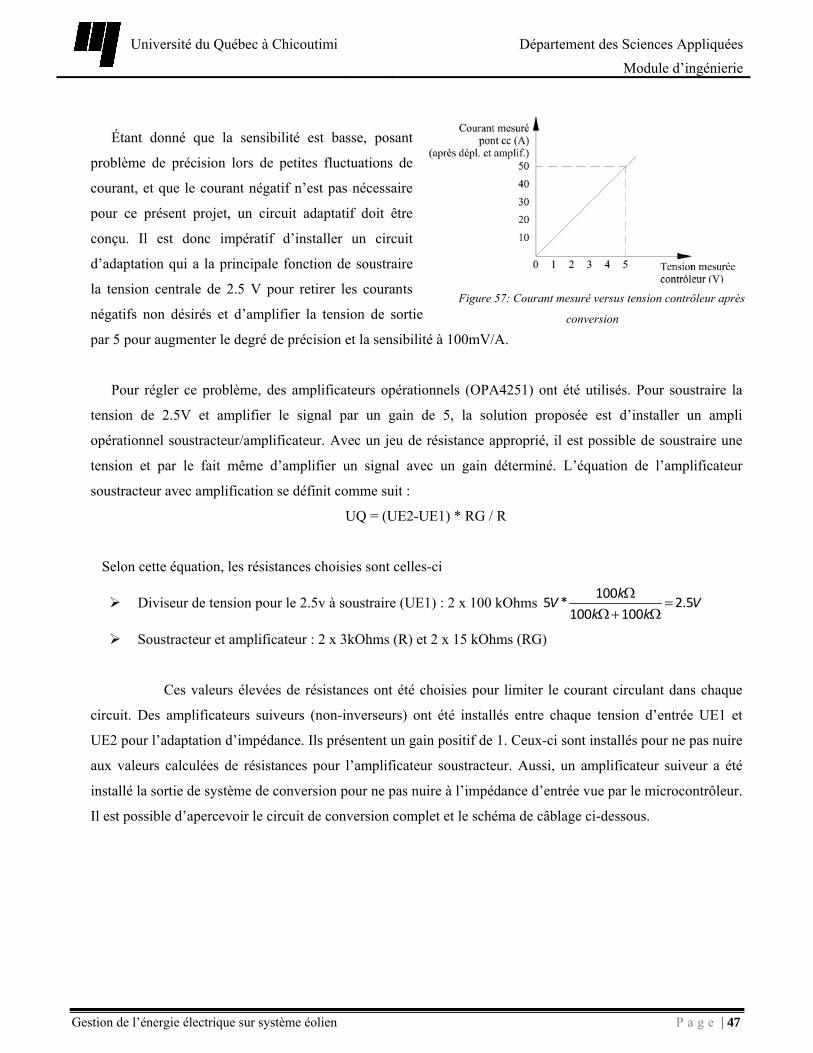
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 47
Étant donné que la sensibilité est basse, posant
problème de précision lors de petites fluctuations de
courant, et que le courant négatif n’est pas nécessaire
pour ce présent projet, un circuit adaptatif doit être
conçu. Il est donc impératif d’installer un circuit
d’adaptation qui a la principale fonction de soustraire
la tension centrale de 2.5 V pour retirer les courants
négatifs non désirés et d’amplifier la tension de sortie
par 5 pour augmenter le degré de précision et la sensibilité à 100mV/A.
Pour régler ce problème, des amplificateurs opérationnels (OPA4251) ont été utilisés. Pour soustraire la
tension de 2.5V et amplifier le signal par un gain de 5, la solution proposée est d’installer un ampli
opérationnel soustracteur/amplificateur. Avec un jeu de résistance approprié, il est possible de soustraire une
tension et par le fait même d’amplifier un signal avec un gain déterminé. L’équation de l’amplificateur
soustracteur avec amplification se définit comme suit :
UQ = (UE2-UE1) * RG / R
Selon cette équation, les résistances choisies sont celles-ci
Diviseur de tension pour le 2.5v à soustraire (UE1) : 2 x 100 kOhms 100
5 * 2.5100 100
kV V
k kΩ
=Ω+ Ω
Soustracteur et amplificateur : 2 x 3kOhms (R) et 2 x 15 kOhms (RG)
Ces valeurs élevées de résistances ont été choisies pour limiter le courant circulant dans chaque
circuit. Des amplificateurs suiveurs (non-inverseurs) ont été installés entre chaque tension d’entrée UE1 et
UE2 pour l’adaptation d’impédance. Ils présentent un gain positif de 1. Ceux-ci sont installés pour ne pas nuire
aux valeurs calculées de résistances pour l’amplificateur soustracteur. Aussi, un amplificateur suiveur a été
installé la sortie de système de conversion pour ne pas nuire à l’impédance d’entrée vue par le microcontrôleur.
Il est possible d’apercevoir le circuit de conversion complet et le schéma de câblage ci-dessous.
Figure 57: Courant mesuré versus tension contrôleur après
conversion
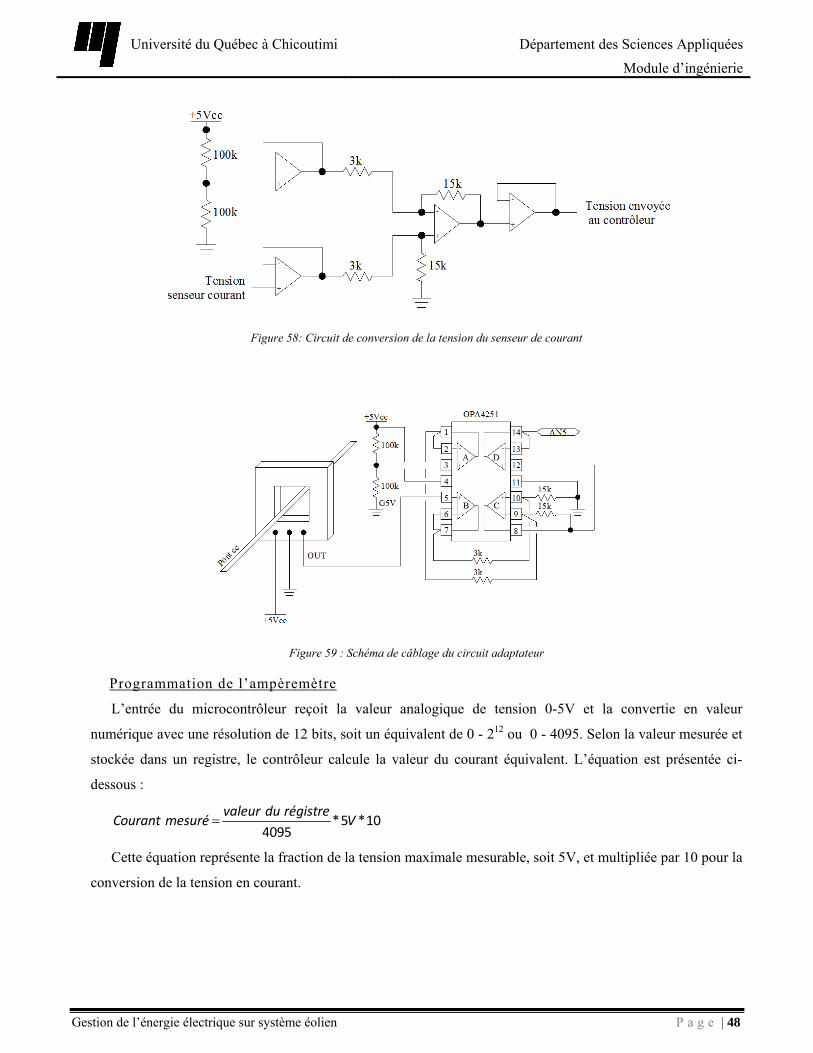
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 48
Figure 58: Circuit de conversion de la tension du senseur de courant
Figure 59 : Schéma de câblage du circuit adaptateur
Programmation de l’ampèremètre
L’entrée du microcontrôleur reçoit la valeur analogique de tension 0-5V et la convertie en valeur
numérique avec une résolution de 12 bits, soit un équivalent de 0 - 212 ou 0 - 4095. Selon la valeur mesurée et
stockée dans un registre, le contrôleur calcule la valeur du courant équivalent. L’équation est présentée ci-
dessous :
*5 *10
4095valeur du régistre
Courant mesuré V=
Cette équation représente la fraction de la tension maximale mesurable, soit 5V, et multipliée par 10 pour la
conversion de la tension en courant.
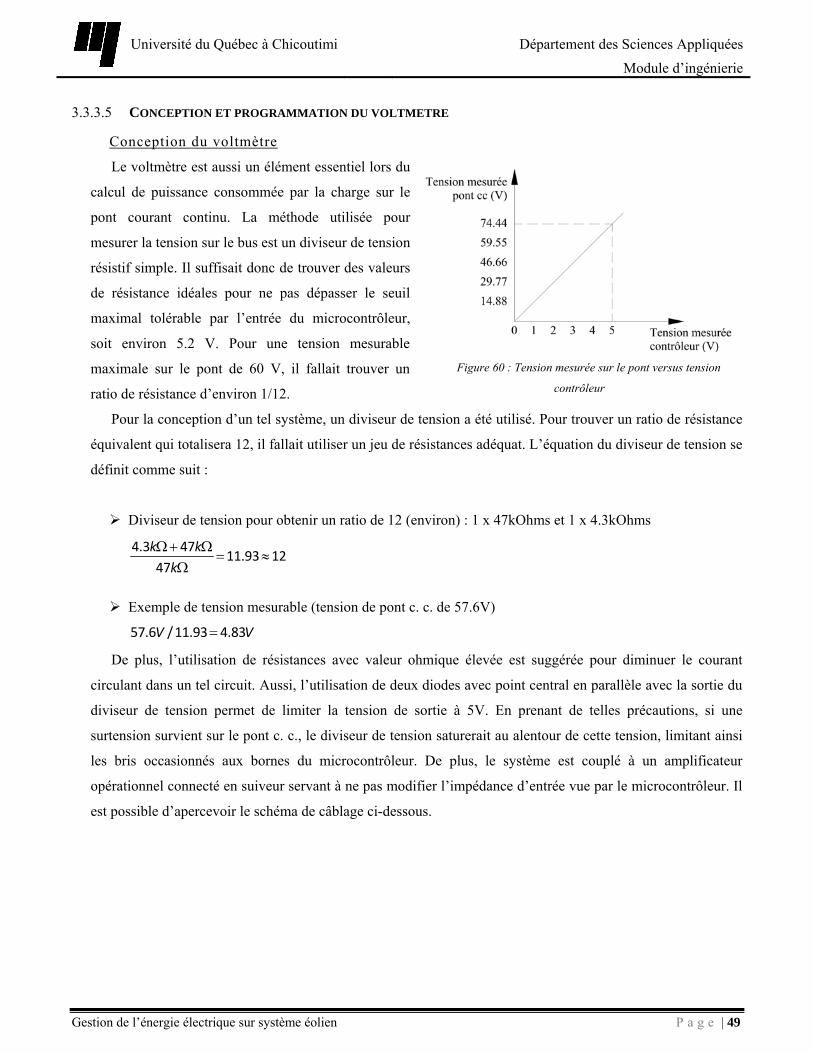
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 49
3.3.3.5 CONCEPTION ET PROGRAMMATION DU VOLTMETRE
Conception du voltmètre
Le voltmètre est aussi un élément essentiel lors du
calcul de puissance consommée par la charge sur le
pont courant continu. La méthode utilisée pour
mesurer la tension sur le bus est un diviseur de tension
résistif simple. Il suffisait donc de trouver des valeurs
de résistance idéales pour ne pas dépasser le seuil
maximal tolérable par l’entrée du microcontrôleur,
soit environ 5.2 V. Pour une tension mesurable
maximale sur le pont de 60 V, il fallait trouver un
ratio de résistance d’environ 1/12.
Pour la conception d’un tel système, un diviseur de tension a été utilisé. Pour trouver un ratio de résistance
équivalent qui totalisera 12, il fallait utiliser un jeu de résistances adéquat. L’équation du diviseur de tension se
définit comme suit :
Diviseur de tension pour obtenir un ratio de 12 (environ) : 1 x 47kOhms et 1 x 4.3kOhms
4.3 4711.93 12
47k k
kΩ+ Ω
= ≈Ω
Exemple de tension mesurable (tension de pont c. c. de 57.6V)
57.6 /11.93 4.83V V=
De plus, l’utilisation de résistances avec valeur ohmique élevée est suggérée pour diminuer le courant
circulant dans un tel circuit. Aussi, l’utilisation de deux diodes avec point central en parallèle avec la sortie du
diviseur de tension permet de limiter la tension de sortie à 5V. En prenant de telles précautions, si une
surtension survient sur le pont c. c., le diviseur de tension saturerait au alentour de cette tension, limitant ainsi
les bris occasionnés aux bornes du microcontrôleur. De plus, le système est couplé à un amplificateur
opérationnel connecté en suiveur servant à ne pas modifier l’impédance d’entrée vue par le microcontrôleur. Il
est possible d’apercevoir le schéma de câblage ci-dessous.
Figure 60 : Tension mesurée sur le pont versus tension
contrôleur
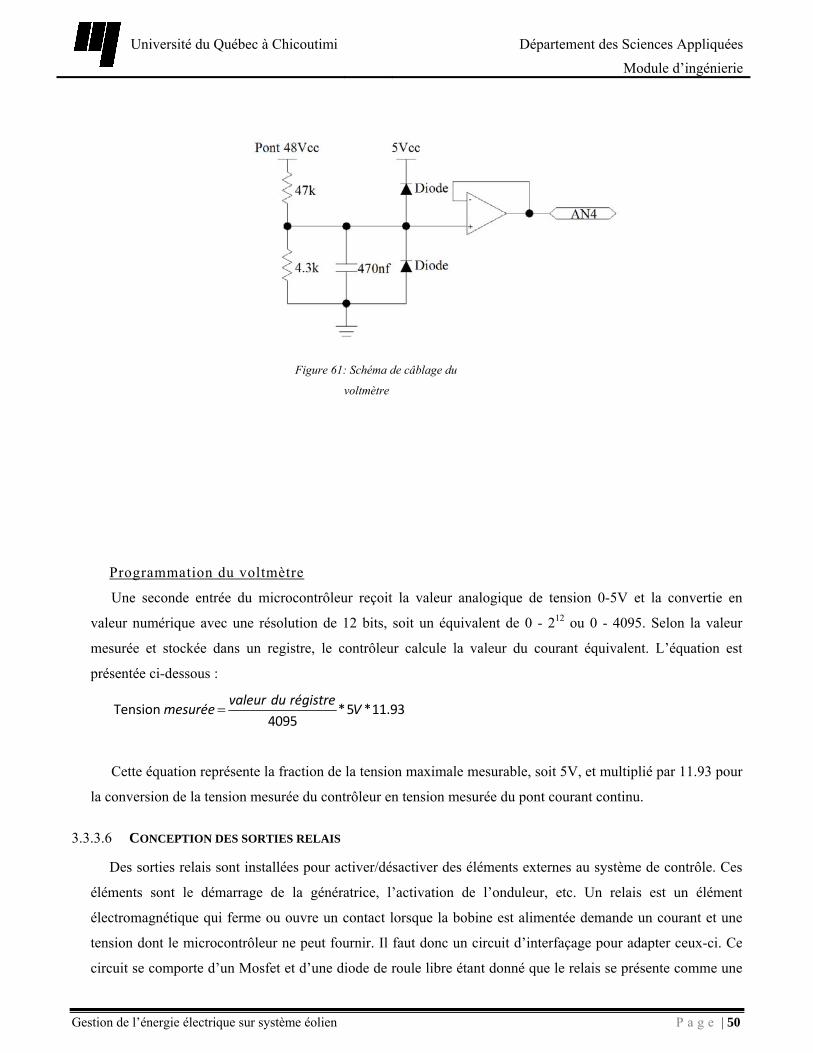
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 50
Programmation du voltmètre
Une seconde entrée du microcontrôleur reçoit la valeur analogique de tension 0-5V et la convertie en
valeur numérique avec une résolution de 12 bits, soit un équivalent de 0 - 212 ou 0 - 4095. Selon la valeur
mesurée et stockée dans un registre, le contrôleur calcule la valeur du courant équivalent. L’équation est
présentée ci-dessous :
Tension *5 *11.93
4095valeur du régistre
mesurée V=
Cette équation représente la fraction de la tension maximale mesurable, soit 5V, et multiplié par 11.93 pour
la conversion de la tension mesurée du contrôleur en tension mesurée du pont courant continu.
3.3.3.6 CONCEPTION DES SORTIES RELAIS
Des sorties relais sont installées pour activer/désactiver des éléments externes au système de contrôle. Ces
éléments sont le démarrage de la génératrice, l’activation de l’onduleur, etc. Un relais est un élément
électromagnétique qui ferme ou ouvre un contact lorsque la bobine est alimentée demande un courant et une
tension dont le microcontrôleur ne peut fournir. Il faut donc un circuit d’interfaçage pour adapter ceux-ci. Ce
circuit se comporte d’un Mosfet et d’une diode de roule libre étant donné que le relais se présente comme une
Figure 61: Schéma de câblage du
voltmètre
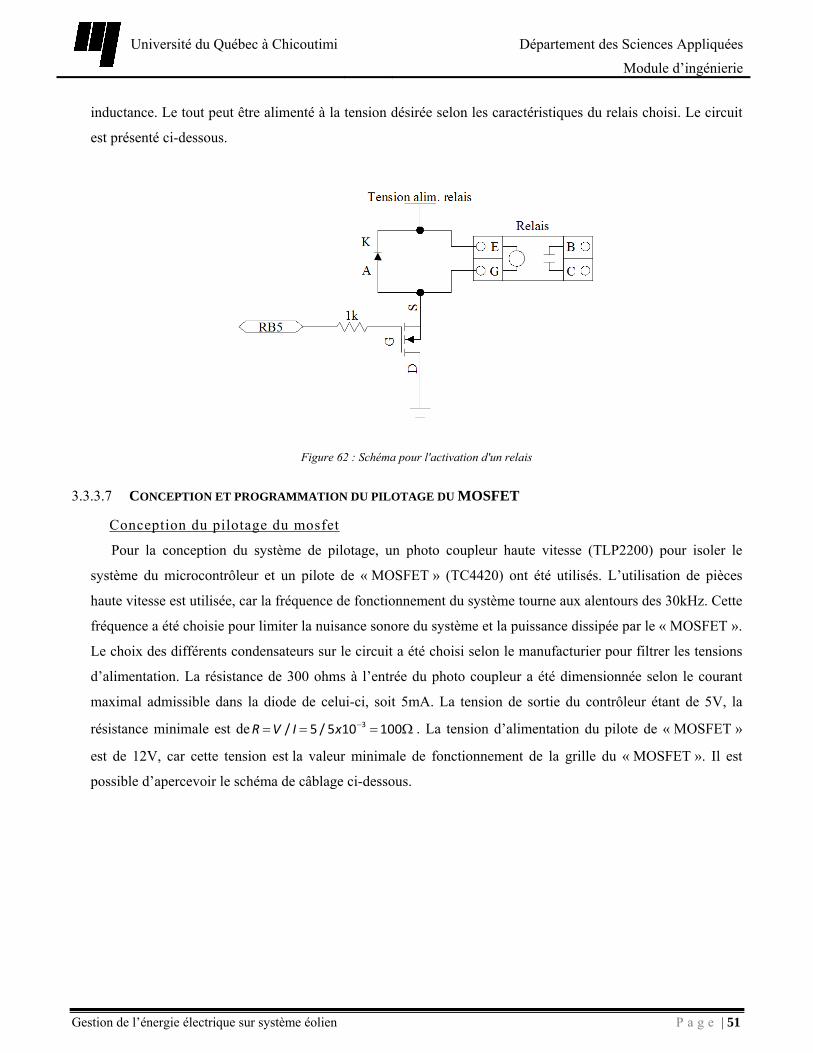
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 51
inductance. Le tout peut être alimenté à la tension désirée selon les caractéristiques du relais choisi. Le circuit
est présenté ci-dessous.
Figure 62 : Schéma pour l'activation d'un relais
3.3.3.7 CONCEPTION ET PROGRAMMATION DU PILOTAGE DU MOSFET
Conception du pilotage du mosfet
Pour la conception du système de pilotage, un photo coupleur haute vitesse (TLP2200) pour isoler le
système du microcontrôleur et un pilote de « MOSFET » (TC4420) ont été utilisés. L’utilisation de pièces
haute vitesse est utilisée, car la fréquence de fonctionnement du système tourne aux alentours des 30kHz. Cette
fréquence a été choisie pour limiter la nuisance sonore du système et la puissance dissipée par le « MOSFET ».
Le choix des différents condensateurs sur le circuit a été choisi selon le manufacturier pour filtrer les tensions
d’alimentation. La résistance de 300 ohms à l’entrée du photo coupleur a été dimensionnée selon le courant
maximal admissible dans la diode de celui-ci, soit 5mA. La tension de sortie du contrôleur étant de 5V, la
résistance minimale est de 3/ 5 / 5 10 100R V I x −= = = Ω . La tension d’alimentation du pilote de « MOSFET »
est de 12V, car cette tension est la valeur minimale de fonctionnement de la grille du « MOSFET ». Il est
possible d’apercevoir le schéma de câblage ci-dessous.
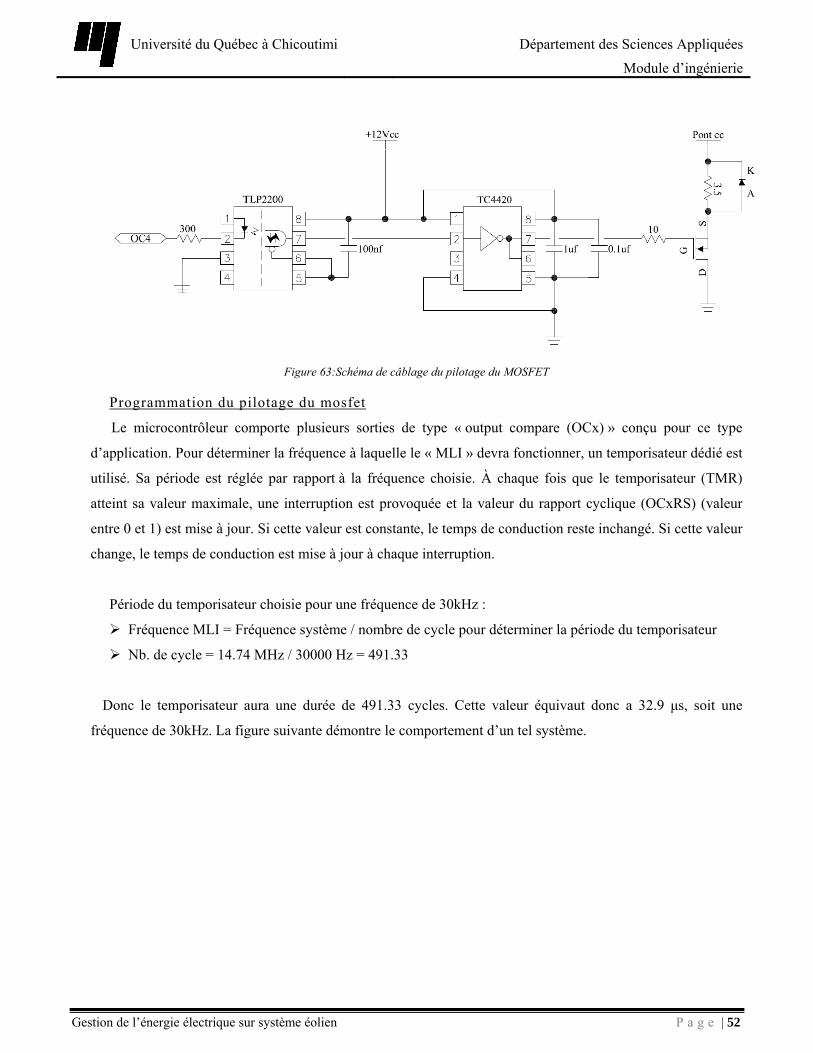
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 52
Figure 63:Schéma de câblage du pilotage du MOSFET
Programmation du pilotage du mosfet
Le microcontrôleur comporte plusieurs sorties de type « output compare (OCx) » conçu pour ce type
d’application. Pour déterminer la fréquence à laquelle le « MLI » devra fonctionner, un temporisateur dédié est
utilisé. Sa période est réglée par rapport à la fréquence choisie. À chaque fois que le temporisateur (TMR)
atteint sa valeur maximale, une interruption est provoquée et la valeur du rapport cyclique (OCxRS) (valeur
entre 0 et 1) est mise à jour. Si cette valeur est constante, le temps de conduction reste inchangé. Si cette valeur
change, le temps de conduction est mise à jour à chaque interruption.
Période du temporisateur choisie pour une fréquence de 30kHz :
Fréquence MLI = Fréquence système / nombre de cycle pour déterminer la période du temporisateur
Nb. de cycle = 14.74 MHz / 30000 Hz = 491.33
Donc le temporisateur aura une durée de 491.33 cycles. Cette valeur équivaut donc a 32.9 μs, soit une
fréquence de 30kHz. La figure suivante démontre le comportement d’un tel système.
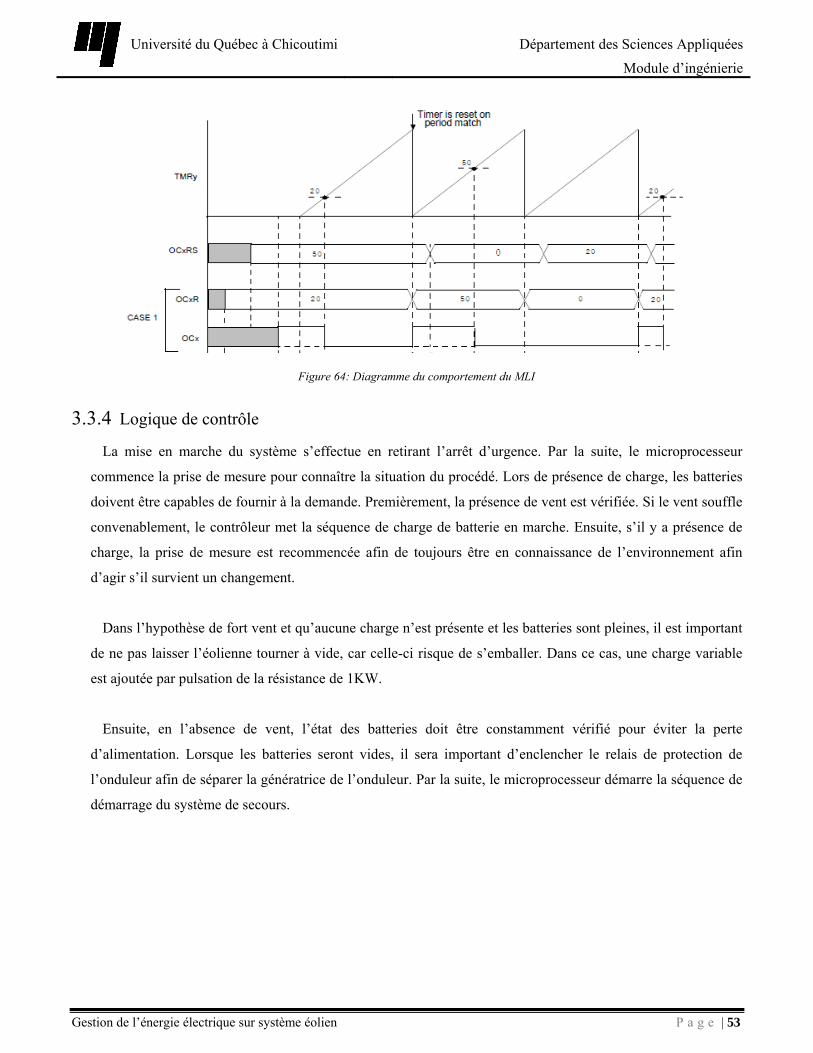
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 53
Figure 64: Diagramme du comportement du MLI
3.3.4 Logique de contrôle La mise en marche du système s’effectue en retirant l’arrêt d’urgence. Par la suite, le microprocesseur
commence la prise de mesure pour connaître la situation du procédé. Lors de présence de charge, les batteries
doivent être capables de fournir à la demande. Premièrement, la présence de vent est vérifiée. Si le vent souffle
convenablement, le contrôleur met la séquence de charge de batterie en marche. Ensuite, s’il y a présence de
charge, la prise de mesure est recommencée afin de toujours être en connaissance de l’environnement afin
d’agir s’il survient un changement.
Dans l’hypothèse de fort vent et qu’aucune charge n’est présente et les batteries sont pleines, il est important
de ne pas laisser l’éolienne tourner à vide, car celle-ci risque de s’emballer. Dans ce cas, une charge variable
est ajoutée par pulsation de la résistance de 1KW.
Ensuite, en l’absence de vent, l’état des batteries doit être constamment vérifié pour éviter la perte
d’alimentation. Lorsque les batteries seront vides, il sera important d’enclencher le relais de protection de
l’onduleur afin de séparer la génératrice de l’onduleur. Par la suite, le microprocesseur démarre la séquence de
démarrage du système de secours.
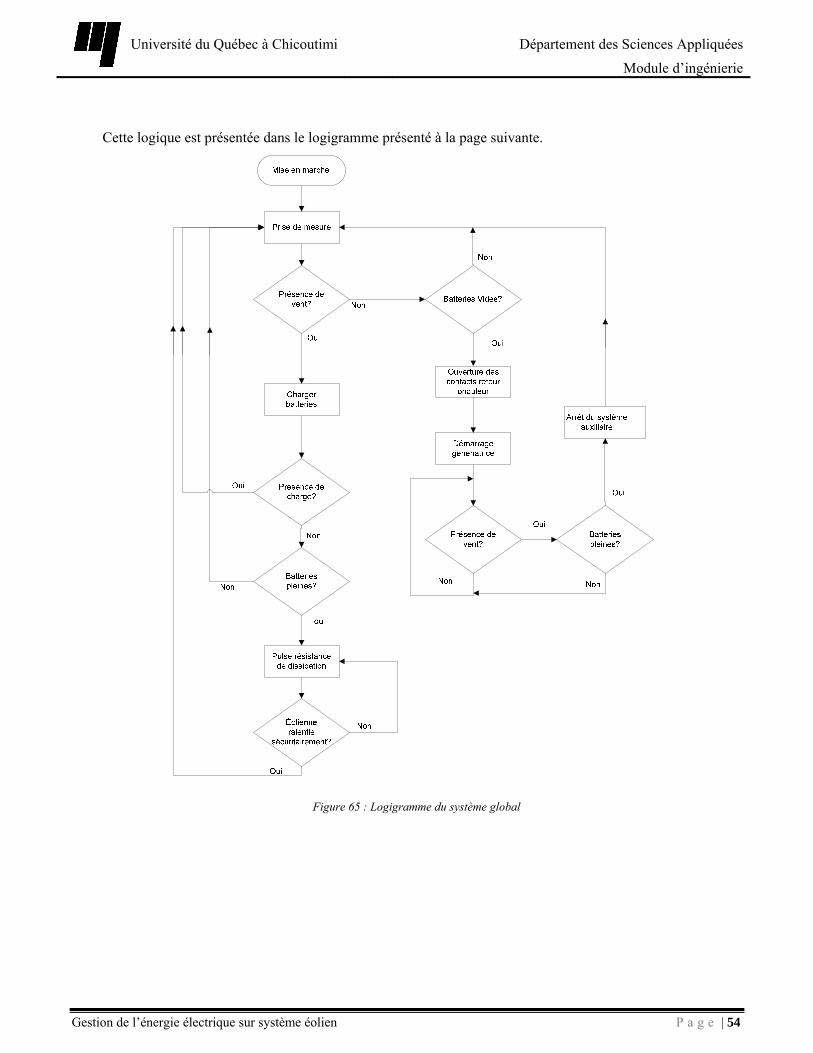
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 54
Cette logique est présentée dans le logigramme présenté à la page suivante.
Figure 65 : Logigramme du système global
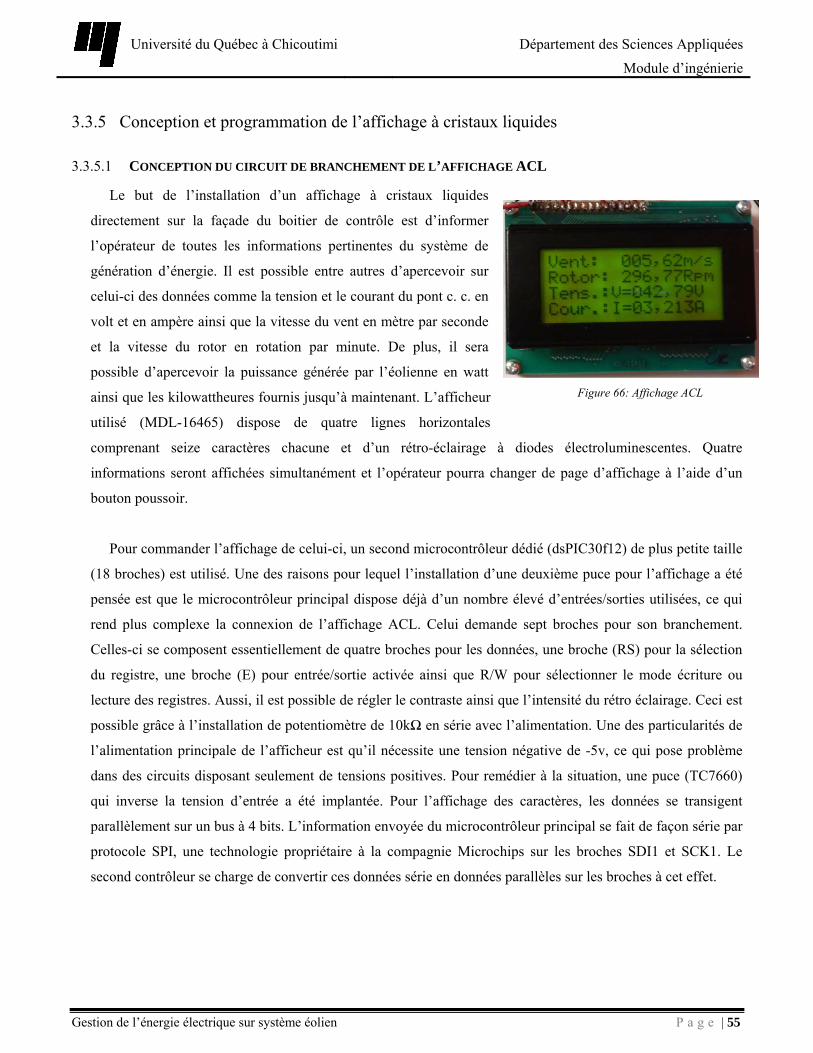
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 55
3.3.5 Conception et programmation de l’affichage à cristaux liquides
3.3.5.1 CONCEPTION DU CIRCUIT DE BRANCHEMENT DE L’AFFICHAGE ACL
Le but de l’installation d’un affichage à cristaux liquides
directement sur la façade du boitier de contrôle est d’informer
l’opérateur de toutes les informations pertinentes du système de
génération d’énergie. Il est possible entre autres d’apercevoir sur
celui-ci des données comme la tension et le courant du pont c. c. en
volt et en ampère ainsi que la vitesse du vent en mètre par seconde
et la vitesse du rotor en rotation par minute. De plus, il sera
possible d’apercevoir la puissance générée par l’éolienne en watt
ainsi que les kilowattheures fournis jusqu’à maintenant. L’afficheur
utilisé (MDL-16465) dispose de quatre lignes horizontales
comprenant seize caractères chacune et d’un rétro-éclairage à diodes électroluminescentes. Quatre
informations seront affichées simultanément et l’opérateur pourra changer de page d’affichage à l’aide d’un
bouton poussoir.
Pour commander l’affichage de celui-ci, un second microcontrôleur dédié (dsPIC30f12) de plus petite taille
(18 broches) est utilisé. Une des raisons pour lequel l’installation d’une deuxième puce pour l’affichage a été
pensée est que le microcontrôleur principal dispose déjà d’un nombre élevé d’entrées/sorties utilisées, ce qui
rend plus complexe la connexion de l’affichage ACL. Celui demande sept broches pour son branchement.
Celles-ci se composent essentiellement de quatre broches pour les données, une broche (RS) pour la sélection
du registre, une broche (E) pour entrée/sortie activée ainsi que R/W pour sélectionner le mode écriture ou
lecture des registres. Aussi, il est possible de régler le contraste ainsi que l’intensité du rétro éclairage. Ceci est
possible grâce à l’installation de potentiomètre de 10kΩ en série avec l’alimentation. Une des particularités de
l’alimentation principale de l’afficheur est qu’il nécessite une tension négative de -5v, ce qui pose problème
dans des circuits disposant seulement de tensions positives. Pour remédier à la situation, une puce (TC7660)
qui inverse la tension d’entrée a été implantée. Pour l’affichage des caractères, les données se transigent
parallèlement sur un bus à 4 bits. L’information envoyée du microcontrôleur principal se fait de façon série par
protocole SPI, une technologie propriétaire à la compagnie Microchips sur les broches SDI1 et SCK1. Le
second contrôleur se charge de convertir ces données série en données parallèles sur les broches à cet effet.
Figure 66: Affichage ACL
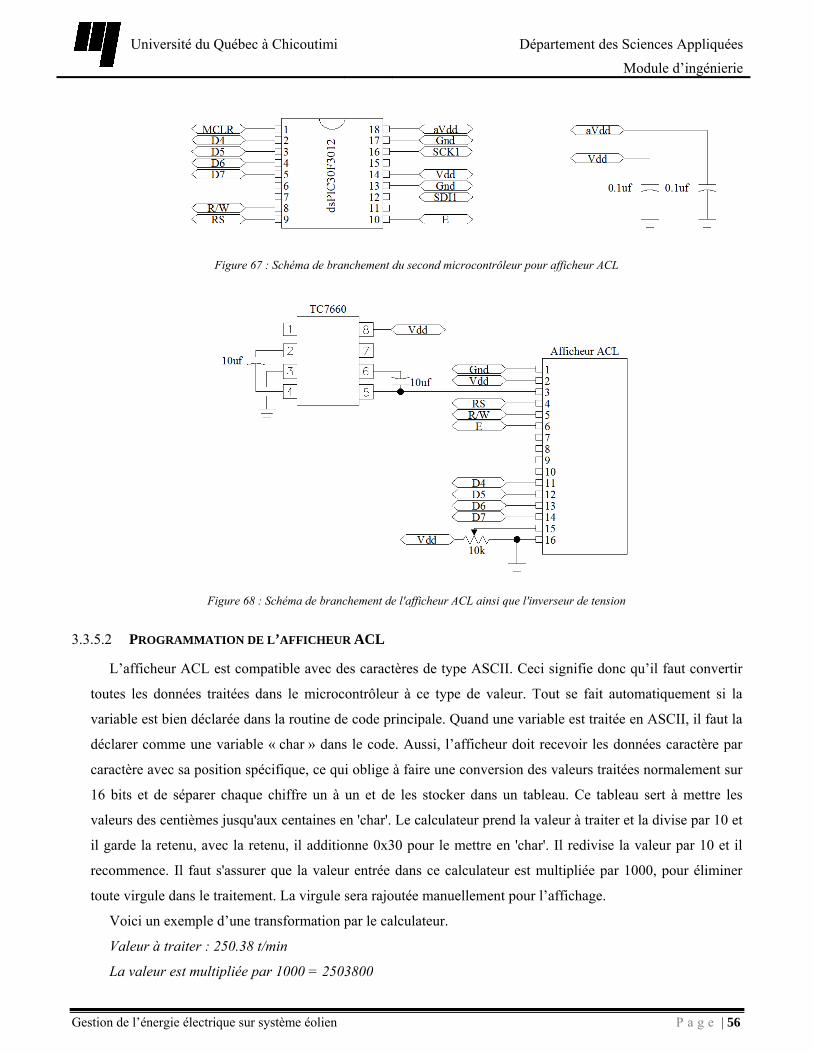
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 56
Figure 67 : Schéma de branchement du second microcontrôleur pour afficheur ACL
Figure 68 : Schéma de branchement de l'afficheur ACL ainsi que l'inverseur de tension
3.3.5.2 PROGRAMMATION DE L’AFFICHEUR ACL
L’afficheur ACL est compatible avec des caractères de type ASCII. Ceci signifie donc qu’il faut convertir
toutes les données traitées dans le microcontrôleur à ce type de valeur. Tout se fait automatiquement si la
variable est bien déclarée dans la routine de code principale. Quand une variable est traitée en ASCII, il faut la
déclarer comme une variable « char » dans le code. Aussi, l’afficheur doit recevoir les données caractère par
caractère avec sa position spécifique, ce qui oblige à faire une conversion des valeurs traitées normalement sur
16 bits et de séparer chaque chiffre un à un et de les stocker dans un tableau. Ce tableau sert à mettre les
valeurs des centièmes jusqu'aux centaines en 'char'. Le calculateur prend la valeur à traiter et la divise par 10 et
il garde la retenu, avec la retenu, il additionne 0x30 pour le mettre en 'char'. Il redivise la valeur par 10 et il
recommence. Il faut s'assurer que la valeur entrée dans ce calculateur est multipliée par 1000, pour éliminer
toute virgule dans le traitement. La virgule sera rajoutée manuellement pour l’affichage.
Voici un exemple d’une transformation par le calculateur.
Valeur à traiter : 250.38 t/min
La valeur est multipliée par 1000 = 2503800
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 57
Tableau 17 : Valeurs stockées dans le tableau du calculateur
Emplacement dans le tableau Valeur stockée dans le tableau 0 (millième) 0 1 (centième) 8 2 (dixième) 3
3 (unité) 0 4 (dizaine) 5 5 (centaine) 2
Comme il a été dit précédemment, l’affichage doit recevoir ses données avec sa propre position. Ce type
d’afficheur comporte donc 64 positions. La routine d’affichage envoie à répétition chaque lettre ou chiffre avec sa
position.
Exemple d’écriture de la vitesse du vent sur la ligne 1 (caractères 0 à 15):
HEX2ASCII(vitesse); //Appeler la routine du calculateur pour la conversion des données
DisplayData[0] = 'V'; //Écrire la lettre « V » dans la position 0 de l’afficheur ACL
DisplayData[1] = 'e'; //Même chose que précedement, écriture de la « e » en 1 et ainsi de suite
DisplayData[2] = 'n';
DisplayData[3] = 't';
DisplayData[4] = ':';
DisplayData[5] = ' ';
DisplayData[6] = ' ';
DisplayData[7] = adhundreds; //Prendre la valeur des centaines dans le tableau du calculateur de conversion
DisplayData[8] = adtens; //Prendre la valeur des dizaines dans le tableau du calculateur de conversion
DisplayData[9] = adones; //Prendre la valeur des unités dans le tableau du calculateur de conversion
DisplayData[10] = ','; //Écriture de la virgule pour l’affichage de la donnée correctement
DisplayData[11] = adtenths; //Prendre la valeur des dixièmes dans le tableau du calculateur de conversion
DisplayData[12] = adhundredths; //Prendre la valeur des centièmes dans le tableau
DisplayData[13] = 'm';
DisplayData[14] = '/';
DisplayData[15] = 's';
3.3.6 Conception et programmation du simulateur de vérification du contrôleur
Le but premier de créer un simulateur pour le présent projet est de pouvoir tester tout le programme instauré
dans le microcontrôleur principal. Ici, il est question de toutes les entrées discrètes destinées aux mesurages
des différents éléments sur le système éolien et de voir si le contrôle programmé fonctionne bien. Le
simulateur retransmet un signal identique qu’un équipement de mesure enverrait au microcontrôleur. Le
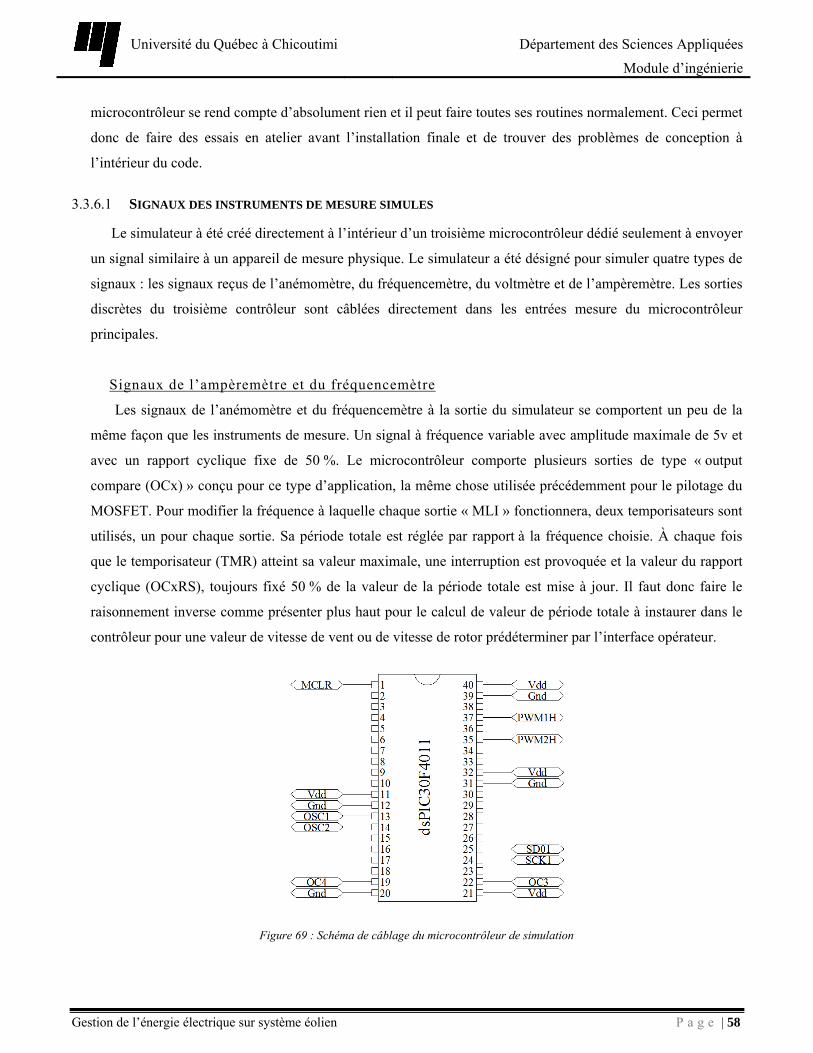
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 58
microcontrôleur se rend compte d’absolument rien et il peut faire toutes ses routines normalement. Ceci permet
donc de faire des essais en atelier avant l’installation finale et de trouver des problèmes de conception à
l’intérieur du code.
3.3.6.1 SIGNAUX DES INSTRUMENTS DE MESURE SIMULES
Le simulateur à été créé directement à l’intérieur d’un troisième microcontrôleur dédié seulement à envoyer
un signal similaire à un appareil de mesure physique. Le simulateur a été désigné pour simuler quatre types de
signaux : les signaux reçus de l’anémomètre, du fréquencemètre, du voltmètre et de l’ampèremètre. Les sorties
discrètes du troisième contrôleur sont câblées directement dans les entrées mesure du microcontrôleur
principales.
Signaux de l’ampèremètre et du fréquencemètre
Les signaux de l’anémomètre et du fréquencemètre à la sortie du simulateur se comportent un peu de la
même façon que les instruments de mesure. Un signal à fréquence variable avec amplitude maximale de 5v et
avec un rapport cyclique fixe de 50 %. Le microcontrôleur comporte plusieurs sorties de type « output
compare (OCx) » conçu pour ce type d’application, la même chose utilisée précédemment pour le pilotage du
MOSFET. Pour modifier la fréquence à laquelle chaque sortie « MLI » fonctionnera, deux temporisateurs sont
utilisés, un pour chaque sortie. Sa période totale est réglée par rapport à la fréquence choisie. À chaque fois
que le temporisateur (TMR) atteint sa valeur maximale, une interruption est provoquée et la valeur du rapport
cyclique (OCxRS), toujours fixé 50 % de la valeur de la période totale est mise à jour. Il faut donc faire le
raisonnement inverse comme présenter plus haut pour le calcul de valeur de période totale à instaurer dans le
contrôleur pour une valeur de vitesse de vent ou de vitesse de rotor prédéterminer par l’interface opérateur.
Figure 69 : Schéma de câblage du microcontrôleur de simulation
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 59
Tableau 18 : Liste des entrées/sorties du microcontrôleur de simulation
Description Type Broche Nom des entrées/sortiesSimulation de l’anémomètre Sortie analogique 22 OC3
Simulation du fréquencemètre Sortie analogique 19 OC4 Simulation du voltmètre Sortie PWM 37 PWM1H
Simulation de l’ampèremètre Sortie PWM 35 PWM2H
Exemple de calcul pour trouver la période totale de la sortie vitesse du vent et
fréquencemètre.
Vitesse du vent envoyée par l’interface :15.25 m/s
9 9
1 1 ( ) 4248
/1.111*256*67 10 15.25 /1.111*256*67 10*50% 2124
PRx période totalevitesse du vent x x
OCxRS PRx
− −= = ≈
= ≈
256 : coefficient multiplicateur pour une plus grande plage du temporisateur. À chaque 256 cycles, le
temporisateur compte de 1
67x10-9 : temps de cycle du microcontrôleur
1.111 : conversion de m/s en hertz
Vitesse du rotor à simuler : 250 rpm
9 9
1 1 ( ) 2798
/12*256*67 10 250 /12*256*67 10*50% 1399
PRx période totalevitesse du rotor x x
OCxRS PRx
− −= = ≈
= =
12 : conversion de r/min en hertz
Signaux du voltmètre et ampèremètre
En ce qui a trait à la simulation des signaux envoyés des voltmètre et ampèremètre, il fallait faire en sorte
que les sorties simulent une tension variable, ces appareils de mesure envoyant une tension de 0-5v selon la
mesure. Le microcontrôleur simulateur ne comporte pas de sortie analogique. Donc il fallait trouver une autre
alternative pour réaliser un tel signal. La façon la plus simple trouve est de faire des ses sorties des hacheurs de
tension avec une tension moyenne équivalente à la valeur voulue. Une des particularités du microcontrôleur
choisi est qu’il possède des sorties « PWM » matérielles («hardware»). Ce qui simplifie grandement le
traitement interne du code. Il suffit donc de choisir une valeur de période fixe pour toutes les sorties MLI et de
faire varier le rapport cyclique pour varier la tension moyenne. Une fréquence de 300 kHz a été choisie. Ce
choix sera expliqué un peu plus tard. PTPER représente la période du signal et PDC la valeur du rapport
cyclique multiplier par la période. Le microcontrôleur comporte 3 sorties PWM avec partie haute ou basse

Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 60
pour chaque sortie, ce qui signifie que la portion du rapport cyclique est normale ou inverser selon le cas. Pour
le présent simulateur, les sorties hautes seront utilisées.
9 9
1 1 ( PWM) 50
*67 10 300000*67 10PTPER période
fréquence x x− −= = ≈
Exemple de tension de sortie du voltmètre.
Valeur à simuler 54V = 3.53V (voir conversion dans section voltmètre)
* *2 3.53*50*2 ( PWM) 72
min 4.92voltage PTPER
PDC kvoltage no ale
= = ≈
Exemple de tension de sortie de l’ampèremètre.
Valeur à simuler 5.50A = 2.61V (voir conversion dans section ampèremètre)
* *2 2.61*50*2 ( PWM) 53
min 4.92voltage PTPER
PDC kvoltage no ale
= = ≈
Ce système à première vue fonctionne. Si la sortie est mesurée avec un multimètre numérique, il indique
bel et bien la tension voulue. Cependant, l’entrée du microcontrôleur principale ne voit pas cette tension
comme une tension moyenne, car il acquisitionne la tension sur ses entrées à haute vitesse. Il fallait donc
trouver une alternative pour filtrer le signal pour voir une belle tension analogique. Le dsPIC voit deux valeurs
avec ce signal haché, un « 0V » ou un « 5V » et non pas la tension simulée. La conception d’un circuit
composé d’un condensateur et d’une inductance était donc indispensable. Pour limiter la grosseur de
l’inductance et les valeurs disponibles sur le marché, une fréquence de 300 kHz a été choisie. Avec une
inductance de 100 µH et en se fixant une ondulation de tension maximale ρV de 1 %, il était possible de trouver
la valeur de condensateur à installer dans ce circuit. Avec l’équation d’une alimentation à découpage en mode
dévolteur, il est possible de calculer le condensateur.
02
0
18V
V kV LCf
ρ −= =
Avec un rapport cyclique de 0.5, représentant le pire des cas.
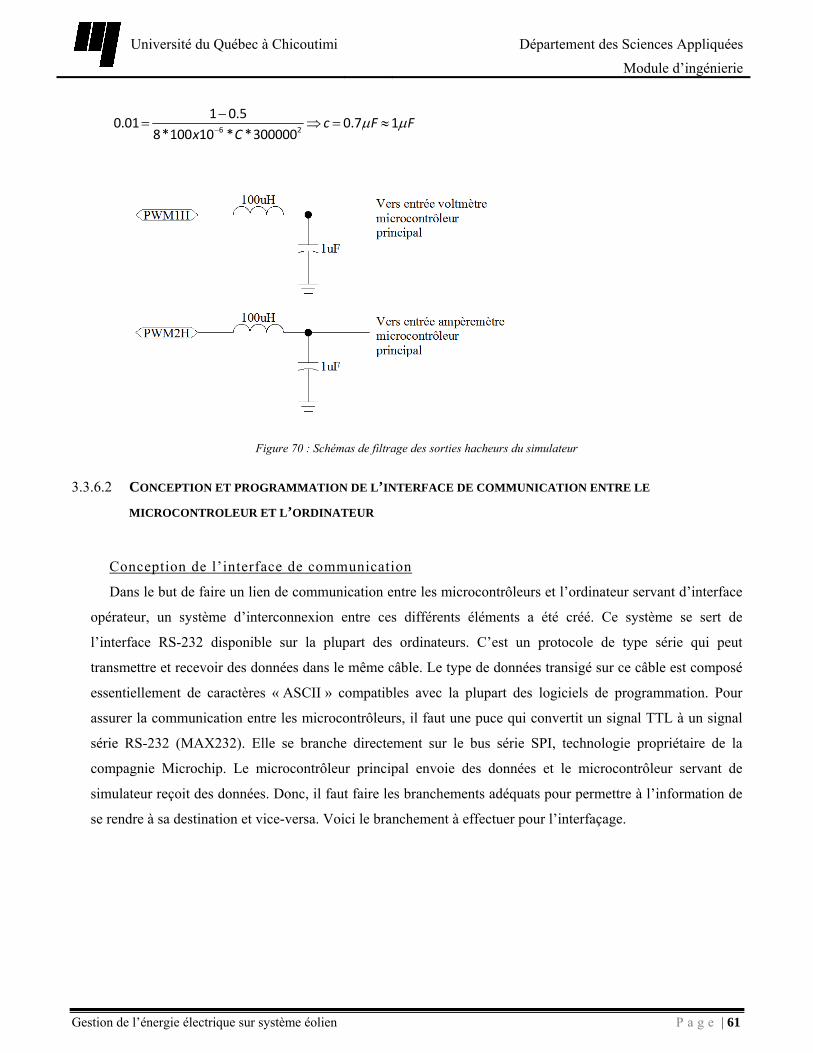
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 61
Figure 70 : Schémas de filtrage des sorties hacheurs du simulateur
3.3.6.2 CONCEPTION ET PROGRAMMATION DE L’INTERFACE DE COMMUNICATION ENTRE LE
MICROCONTROLEUR ET L’ORDINATEUR
Conception de l’interface de communication
Dans le but de faire un lien de communication entre les microcontrôleurs et l’ordinateur servant d’interface
opérateur, un système d’interconnexion entre ces différents éléments a été créé. Ce système se sert de
l’interface RS-232 disponible sur la plupart des ordinateurs. C’est un protocole de type série qui peut
transmettre et recevoir des données dans le même câble. Le type de données transigé sur ce câble est composé
essentiellement de caractères « ASCII » compatibles avec la plupart des logiciels de programmation. Pour
assurer la communication entre les microcontrôleurs, il faut une puce qui convertit un signal TTL à un signal
série RS-232 (MAX232). Elle se branche directement sur le bus série SPI, technologie propriétaire de la
compagnie Microchip. Le microcontrôleur principal envoie des données et le microcontrôleur servant de
simulateur reçoit des données. Donc, il faut faire les branchements adéquats pour permettre à l’information de
se rendre à sa destination et vice-versa. Voici le branchement à effectuer pour l’interfaçage.
6 2
1 0.50.01 0.7 1
8*100 10 * *300000c F F
x Cμ μ−
−= ⇒ = ≈
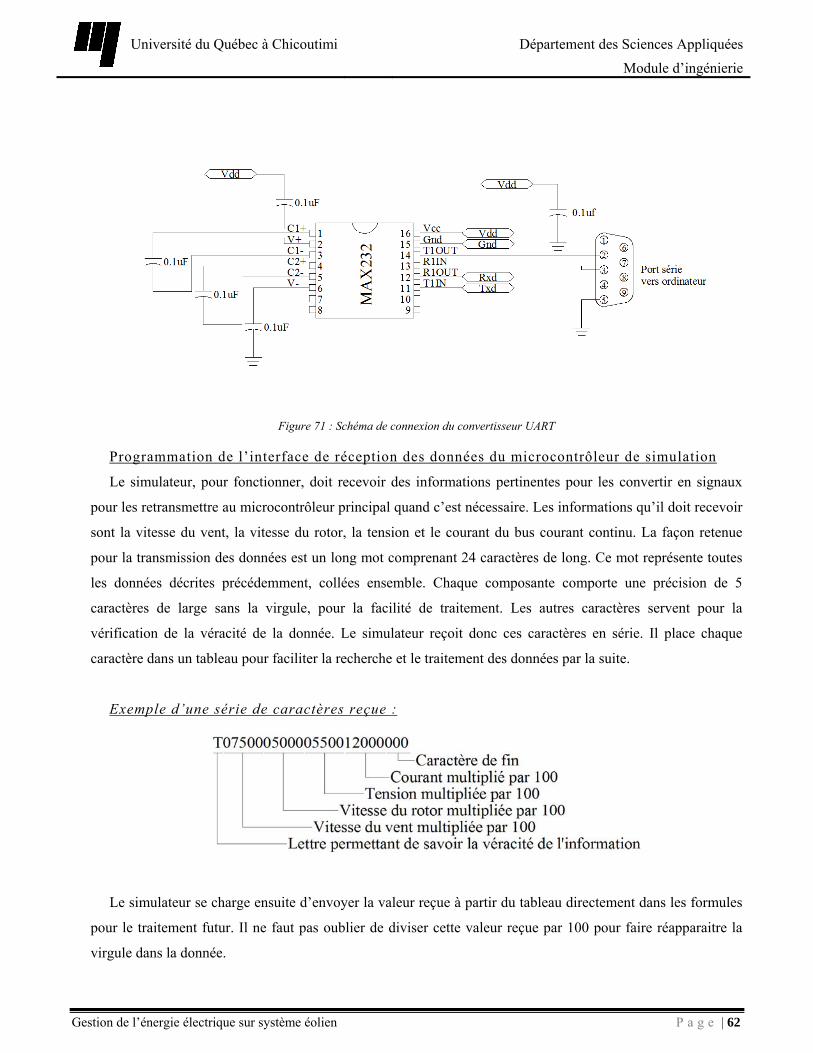
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 62
Figure 71 : Schéma de connexion du convertisseur UART
Programmation de l’interface de réception des données du microcontrôleur de simulation
Le simulateur, pour fonctionner, doit recevoir des informations pertinentes pour les convertir en signaux
pour les retransmettre au microcontrôleur principal quand c’est nécessaire. Les informations qu’il doit recevoir
sont la vitesse du vent, la vitesse du rotor, la tension et le courant du bus courant continu. La façon retenue
pour la transmission des données est un long mot comprenant 24 caractères de long. Ce mot représente toutes
les données décrites précédemment, collées ensemble. Chaque composante comporte une précision de 5
caractères de large sans la virgule, pour la facilité de traitement. Les autres caractères servent pour la
vérification de la véracité de la donnée. Le simulateur reçoit donc ces caractères en série. Il place chaque
caractère dans un tableau pour faciliter la recherche et le traitement des données par la suite.
Exemple d’une série de caractères reçue :
Le simulateur se charge ensuite d’envoyer la valeur reçue à partir du tableau directement dans les formules
pour le traitement futur. Il ne faut pas oublier de diviser cette valeur reçue par 100 pour faire réapparaitre la
virgule dans la donnée.
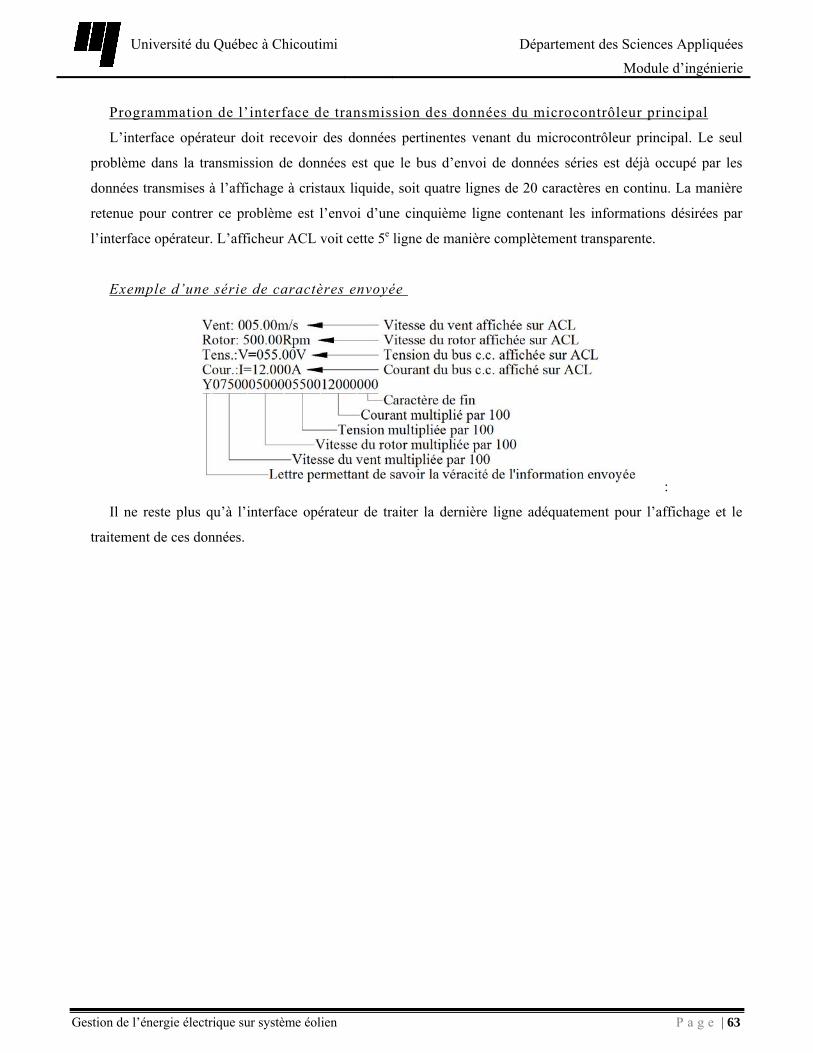
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 63
Programmation de l’interface de transmission des données du microcontrôleur principal
L’interface opérateur doit recevoir des données pertinentes venant du microcontrôleur principal. Le seul
problème dans la transmission de données est que le bus d’envoi de données séries est déjà occupé par les
données transmises à l’affichage à cristaux liquide, soit quatre lignes de 20 caractères en continu. La manière
retenue pour contrer ce problème est l’envoi d’une cinquième ligne contenant les informations désirées par
l’interface opérateur. L’afficheur ACL voit cette 5e ligne de manière complètement transparente.
Exemple d’une série de caractères envoyée
:
Il ne reste plus qu’à l’interface opérateur de traiter la dernière ligne adéquatement pour l’affichage et le
traitement de ces données.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 64
3.3.7 Interface d’acquisition et de simulation
3.3.7.1 COMMUNICATION ET TRAITEMENT DES DONNEES
L’interface a deux fonctions distinctes. L’une sert à l’acquisition de données et l’autre fait office de
simulateur. En ce qui a trait à l’acquisition de données, le microcontrôleur envoie, selon le protocole expliqué
précédemment dans le document, quatre variables importantes pour l’étude et la compréhension de
l’environnement du système. Ces variables sont : la vitesse du vent, vitesse du rotor de l’alternateur, tension
DC et le courant.
3.3.7.2 ACQUISITION
Afin de recueillir toutes les données correctement, le microcontrôleur envoie une série de 25 caractères
avec un code au début de la chaîne. À l’aide de Visual Basic, les données importantes sont sélectionnées à
leurs places précises dans la chaîne et par la suite elles sont affichées sur l’interface. Ces données sont par la
suite enregistrées dans un fichier Excel pour des fins de consultation future, pour tracer les courbes de
puissance, de vent, etc. Le temps d’acquisition est choisi par l’opérateur. Les problèmes rencontrés sont que le
microcontrôleur envoie les données à une vitesse de 9600 bauds
9600 25 384
caractèrescaractères
Secondes Secondes
⎛ ⎞⎜ ⎟⎝ ⎠ =
Afin de ne pas ralentir l’ordinateur, une vitesse d’acquisition de 1 seconde par rafraichissement est
sélectionnée. Dans la programmation, si la tension est par exemple dans les caractères 21 à 25, il est primordial
d’être synchronisé entre l’envoi et la réception. Cependant, ce synchronisme est quasi impossible et dépend de
beaucoup trop de facteur. Pour contrer ce problème, un code de début et de fin de la chaîne est envoyé. Si
Visual Basic ne repère pas ce code au début et à la fin, il n’affiche rien et passe au tour suivant. Cette méthode
s’est vue très efficace et donne de très bons résultats.
3.3.7.3 SIMULATION
La partie simulation de l’interface est très utile pour imposer les valeurs désirées au microcontrôleur dans le
but de vérifier les séquences de contrôle. La méthode utilisée est semblable à la réception (acquisition), mais
en envoi cette fois-ci. Une chaîne de 25 caractères est envoyée avec un code de début et de fin. Les valeurs
sont multipliées par mille afin d’enlever toutes dixième ou centième d’unité étant donné que la programmation
du contrôleur s’est construite ainsi.
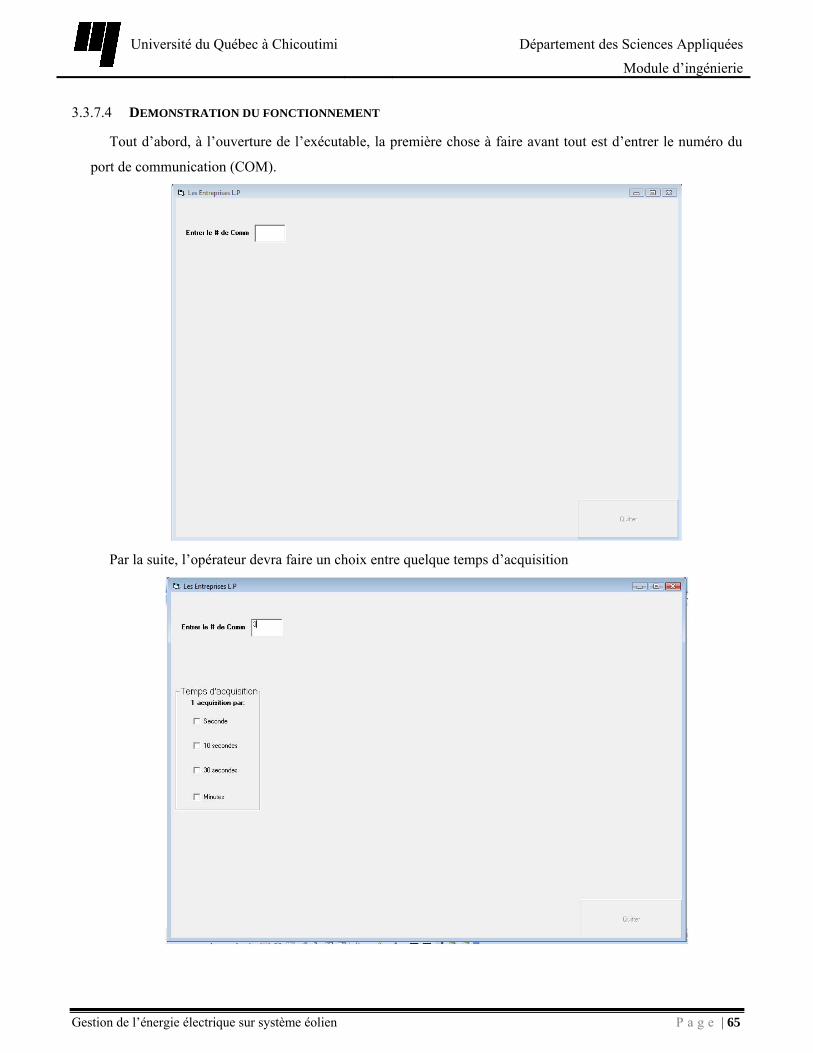
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 65
3.3.7.4 DEMONSTRATION DU FONCTIONNEMENT
Tout d’abord, à l’ouverture de l’exécutable, la première chose à faire avant tout est d’entrer le numéro du
port de communication (COM).
Par la suite, l’opérateur devra faire un choix entre quelque temps d’acquisition
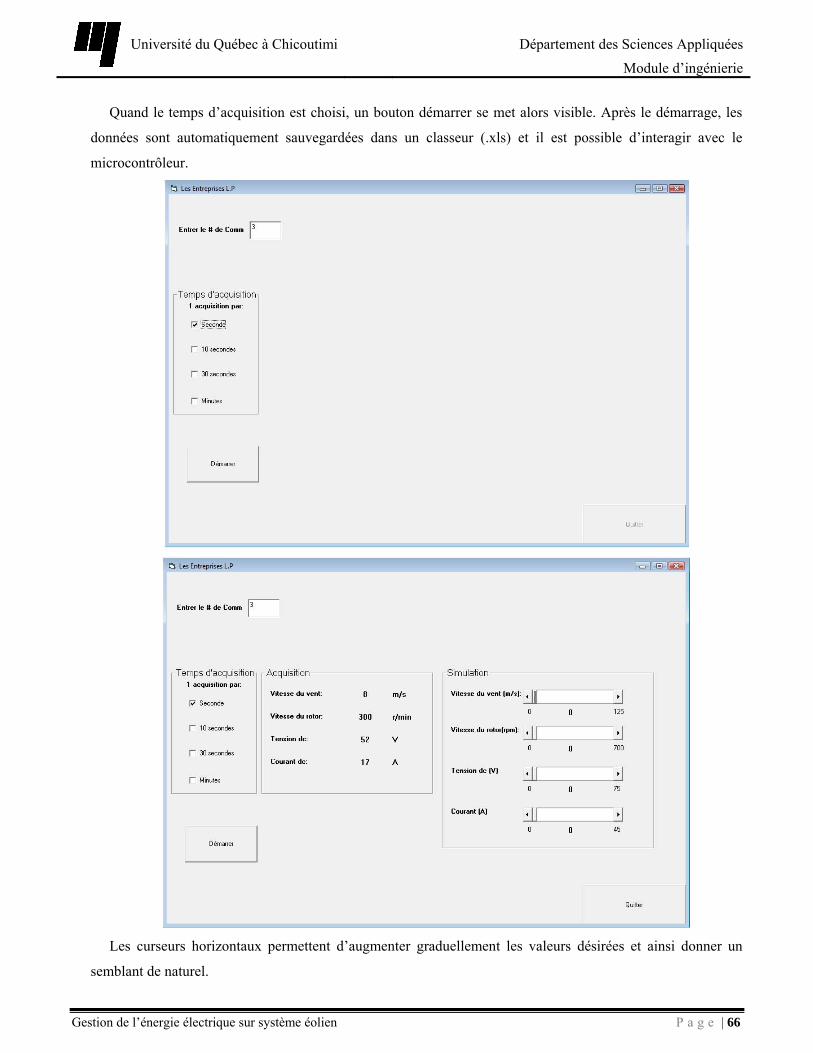
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 66
Quand le temps d’acquisition est choisi, un bouton démarrer se met alors visible. Après le démarrage, les
données sont automatiquement sauvegardées dans un classeur (.xls) et il est possible d’interagir avec le
microcontrôleur.
Les curseurs horizontaux permettent d’augmenter graduellement les valeurs désirées et ainsi donner un
semblant de naturel.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 67
4 BILAN DES ACTIVITES
4.1 Arrimage formation pratique/universitaire
Dans le développement d’un tel système de production d’énergie électrique, plusieurs domaines de
l’ingénierie électrique sont impliqués. Dans l’élaboration de l’étude comportementale du système et dans le
dimensionnement des composantes de puissance, le cours «Électronique de puissance» et «Électrotechnique I
et II» ont été utiles pour la compréhension des phénomènes transitoire et permanent reliés au fonctionnement
du système (machine à aimant permanent, redresseur et onduleur) et pour la conception de ce dernier. Le cours
«Transport et exploitation de l’énergie électrique» a fourni une excellente base dans la réalisation du projet
puisqu’il s’agit d’un système de production d’énergie électrique à partir d’un système éolien où plusieurs
notions ont été couvertes dans ce cours.
Étant donné que le contrôleur choisi est un dsPIC, une bonne connaissance des phénomènes électroniques
expliqués dans les cours «Électronique I et II» a été essentielle. En fait, le filtrage, la conception des
instruments de mesure et le pilotage du MOSFET ont été conçus à partir des notions fournies dans ces deux
cours. De plus, le cours «Introduction aux ordinateurs» a été utile dans la configuration du contrôleur puisqu’il
a été programmé en langage C. Les bases de programmation ont été vues dans ce cours. La communication
entre le contrôleur et l’interface d’acquisition a été conçue en se basant sur les concepts appris dans le cours de
«Système à microprocesseurs».
Finalement, l’expérience acquise lors des stages en entreprise a permis de développer le système selon une
méthodologie adéquate afin d’élaborer le projet dans les règles de l’art.
4.2 Travail d’équipe
Frédéric
Mon intégration à mon équipe de travail immédiate, soit mes coéquipiers Jonathan et Christian, a été très
facile puisque nous avions couramment travaillé ensemble dans le cadre des différents cours du baccalauréat.
Par conséquent, la division des tâches s’est faite par elle-même étant donné que nous avons chacun nos forces
et faiblesses. Pour ma part, une grande partie de mon travail a été de faire les recherches et de développer le
simulateur sur SimPower System. Le reste de mes tâches a été de participer aux essais et à l’élaboration du
système de contrôle. La division des tâches a été sommairement équivalente tout le long du développement du
projet. La participation des techniciens de laboratoire de l’UQAC a permis de réaliser des essais primordiaux
pour l’évolution du projet dans le local P2-2020 et permis de profiter des conseils dans le développement du
système de contrôle. Cette participation fait donc partie intégrante de l’expérience du travail d’équipe entre les
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 68
concepteurs et les techniciens. Cette expérience a été très enrichissante du point de vue «relation» dans une
équipe de travail. Aucune difficulté ou grave mésentente entre les membres de l’équipe a été relevée étant
donné que nous somme habitués de travailler ensemble. Les points de vue de chaque membre ont toujours été
considérés dans l’évolution de ce projet de conception et cela a permis de mener à sa finalité dans les délais
requis.
Christian
Depuis quatre années passées au baccalauréat, les travaux d’équipe se sont multipliés. Que ce soit des
devoirs, rapports de laboratoire ou bien de l’étude, il arrivait souvent qu’ils soient effectués à plusieurs
étudiants. C’est avec le temps que je me suis battis des techniques pour rendre le travail d’équipe efficace.
Étant donné que le projet de conception que j’ai décidé de prendre devait se faire à trois étudiants, c’était
encore une fois une façon d’améliorer mes expériences et compétences au niveau du travail d’équipe.
La relation avec mes coéquipiers était déjà bien établie. C’est à quelques reprises que j’effectuais des
travaux d’équipe avec eux. Je connaissais déjà leur façon de fonctionner. C’est toujours embêtant de
commencer dans une nouvelle équipe. Quand on connait bien les personnes, c’est plus rassurant.
Dans l’équipe, j’étais responsable de concevoir les principaux systèmes électroniques de mesure et la
programmation du microcontrôleur. Étant des systèmes complexes dans leurs ensembles, je devais me tourner
vers eux à l’occasion pour demander conseil et approbation de leur part. C’est un travail d’équipe et il était
dans mon devoir de toujours leur demander leur avis lors de grosse décision. La plupart du temps, le projet
s’effectuait dans les locaux de l’université. Il y avait toujours plein de gens à ma disposition lorsque j’avais des
questions. Que se soit des amis, techniciens de laboratoire, ingénieurs ou bien conseiller, il avait au moins une
personne qui pouvait répondre à mes interrogations. En fait, il est possible de constater qu’on fait partie d’une
plus grande équipe qu’on peut le penser. Il est possible de comparer cela à une grande entreprise avec des gens
de différents domaines. Toute cette aide que j’ai eue m’a permis d’acquérir de nombreuses connaissances
techniques et de me créer un cercle de contact. Tous ces gens possèdent leurs propres expériences personnelles
et c’est en les côtoyant qu’on en bénéficie.
Il arrive parfois dans toute équipe qu’une discorde arrive. C’est souvent le cas quand une idée personnelle
ne parvient pas à convaincre les autres coéquipiers. Il ne faut pas s’entêter avec cela et écouter ce que les
autres membres ont à dire. En gros, tout s’est très bien déroulé et je suis très satisfait de l’équipe avec qui j’ai
travaillé. À trois, nous avons pu trouver de très belles solutions à la problématique qui nous avait été soumise.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 69
Jonathan
Le projet de conception effectué n’aurait jamais été celui qu’il est en ce moment sans le travail d’équipe.
L’équipe de travail est constituée de 3 étudiants en ingénierie, un technicien en travaux pratiques de
l’université, un journalier de l’entreprise ainsi que du promoteur du projet. Les rôles effectués au sein de
l’équipe de travail ont été de travailler conjointement à la conception de l’ingénierie avec les deux autres
étudiants. De plus, il a été très important de spécifier et d’assister à la conception et de la fabrication
mécanique et électrique des différents équipements.
La coordination de l’équipe de travail fut une grande difficulté rencontrée. En effet, les employés de
l’entreprise, étant très occupés, ont eu des difficultés à respecter les délais donnés par les autres membres de
l’équipe. Afin de surmonter ses problèmes, les différents délais donnés ont été changés de façon à accommoder
les deux parties.
En terminant, le projet n’aurait jamais été aussi bien réussi avec une personne seule qu’avec une équipe.
L’entraide des différents membres, le partage de connaissance font la magie du travail d’équipe. Le point de
vue d’une personne avec un grand bagage théorique est important, mais celui de quelqu’un de pratique est tout
aussi important et nécessaire et vient compléter un bon projet.
4.3 Respect de l’échéancier
L’échéancier a eu des modifications majeures étant donné l’ampleur des tâches à réaliser et le temps à
allouer aux autres cours suivis durant les deux sessions attitrées au projet. Tout d’abord, les calculs pour le
dimensionnement des pièces ont été projetés sur une période de deux semaines. Toutefois, ces calculs ont été
étalonnés sur plus de 3 mois puisque le projet s’est déroulé en plusieurs phases et les pièces n’ont pas toutes
été choisies au même moment. Le développement de l’analyse comportementale s’est échelonné sur 3 mois au
lieu de 2 semaines, période projetée dans le plan de travail. En effet, les caprices du logiciel «Simulink» ainsi
que la recherche sur le comportement d’un générateur synchrone à aimant permanent explique ce temps plus
long. Les autres tâches effectuées dans ce projet ont été légèrement plus longues que celle évaluées dans le
plan de travail, soit pour la conception des plans électriques, la programmation du contrôleur, la réalisation de
l’interface opérateur et du simulateur. Il n’est pas toujours évident d’évaluer la longueur des tâches lorsque le
projet se déroule durant les sessions où des cours sont également à l’horaire des étudiants.
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 70
4.4 Analyse et discussion
Le but de ce projet était de concevoir un système de génération d’énergie électrique avec une éolienne
couplée sur une génératrice à combustion. La conception des composantes a été réalisée à partir des notions
vues en classe ainsi que les recherches bibliographiques. Le logiciel MATLAB : Simulink a permis de
confirmer le dimensionnement des pièces et d’analyser le comportement du système global. Le projet
comprenait le développement des instruments de mesure utilisés pour le contrôle de la vitesse du rotor dans
des conditions atmosphériques anormales. De plus, les grandeurs mesurées sont utilisées pour effectuer de
l’acquisition sur plusieurs jours dans le but d’analyser le comportement du système sur une échelle de temps.
Cette interface d’acquisition a été conçue avec une communication série RS232, communication compatible
avec le contrôleur du système (dsPIC). Un simulateur réalisé avec un deuxième dsPIC a permis de vérifier le
fonctionnement de la séquence de contrôle du simulateur en évitant d’installer l’éolienne à l’extérieur ou en
soufflerie. Ce simulateur sera également utile pour l’étalonnage du système si une modification est à réaliser.
La plaquette de contrôle a été développée dans le but d’étalonner le microcontrôleur à l’installation de
l’éolienne. La vitesse de freinage peut être plus rapide ou plus lente que celle définie par défaut selon
l’emplacement de l’éolienne. La lecture de la tension et du courant a été ajustée afin de pallier le manque
d’expertise en interfaçage de puces électroniques. Par conséquent, les erreurs de mesure sont corrigées dans la
programmation du microcontrôleur. Malgré cela, le senseur de courant présente une sensibilité qui varie de
15mV à 22mV, pouvant provoquer des erreurs de lecture. Les lectures analogiques ont été interfacées par un
convertisseur analogique/numérique de 12 bits représentant 4096 valeurs pour une tension lue de 0 à 5V. Cela
présente donc une précision de l’ordre du centième, précision acceptable pour l’acquisition et la prise de
décision dans la programmation du contrôleur. Quant à l’anémomètre et le fréquencemètre, l’erreur de lecture
se situe au niveau du cristal du dsPIC étant donné que ce dernier définit la fréquence fixe de fonctionnement de
l’acquisition. Une fréquence qui fluctue entrainerait des imprécisions sur la prise de mesure. Toutefois, le
cristal présente une très grande précision avec ses 30 ppm. En général, toute fluctuation de température amène
des imprécisions sur tous équipements électroniques, cependant, ces erreurs sont tolérables étant donné que les
valeurs sont utilisées sur des prises de décision se basant seulement sur valeurs arrondies à l’unité.
Le système de contrôle est de type évolutif. En effet, ce système a été réalisé dans le but de pouvoir installer
d’autres équipements tels que relais, boutons, éléments de mesure.
Ce projet, financé par les entreprises LP, avait un budget total de 2500$. Le tableau suivant illustre toutes
les dépenses encourues. Le mandat était de réaliser ce projet dans le budget prévu. Le manque d’expérience
dans l’achat de matériel pour un projet a provoqué quelques achats inutiles gonflant le prix total d’environ
10%. Tout de même, le budget alloué a été respecté.
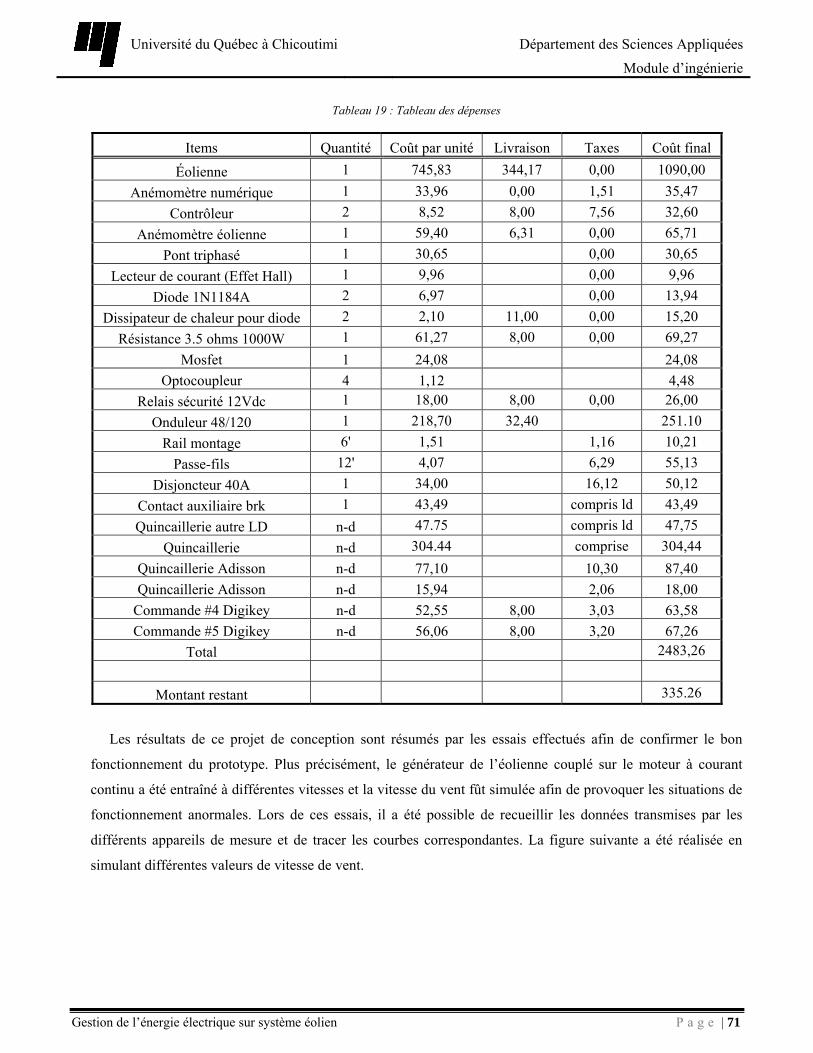
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 71
Tableau 19 : Tableau des dépenses
Items Quantité Coût par unité Livraison Taxes Coût final Éolienne 1 745,83 344,17 0,00 1090,00
Anémomètre numérique 1 33,96 0,00 1,51 35,47 Contrôleur 2 8,52 8,00 7,56 32,60
Anémomètre éolienne 1 59,40 6,31 0,00 65,71 Pont triphasé 1 30,65 0,00 30,65
Lecteur de courant (Effet Hall) 1 9,96 0,00 9,96 Diode 1N1184A 2 6,97 0,00 13,94
Dissipateur de chaleur pour diode 2 2,10 11,00 0,00 15,20 Résistance 3.5 ohms 1000W 1 61,27 8,00 0,00 69,27
Mosfet 1 24,08 24,08 Optocoupleur 4 1,12 4,48
Relais sécurité 12Vdc 1 18,00 8,00 0,00 26,00 Onduleur 48/120 1 218,70 32,40 251.10
Rail montage 6' 1,51 1,16 10,21 Passe-fils 12' 4,07 6,29 55,13
Disjoncteur 40A 1 34,00 16,12 50,12 Contact auxiliaire brk 1 43,49 compris ld 43,49 Quincaillerie autre LD n-d 47.75 compris ld 47,75
Quincaillerie n-d 304.44 comprise 304,44 Quincaillerie Adisson n-d 77,10 10,30 87,40 Quincaillerie Adisson n-d 15,94 2,06 18,00
Commande #4 Digikey n-d 52,55 8,00 3,03 63,58 Commande #5 Digikey n-d 56,06 8,00 3,20 67,26
Total 2483,26
Montant restant 335.26
Les résultats de ce projet de conception sont résumés par les essais effectués afin de confirmer le bon
fonctionnement du prototype. Plus précisément, le générateur de l’éolienne couplé sur le moteur à courant
continu a été entraîné à différentes vitesses et la vitesse du vent fût simulée afin de provoquer les situations de
fonctionnement anormales. Lors de ces essais, il a été possible de recueillir les données transmises par les
différents appareils de mesure et de tracer les courbes correspondantes. La figure suivante a été réalisée en
simulant différentes valeurs de vitesse de vent.
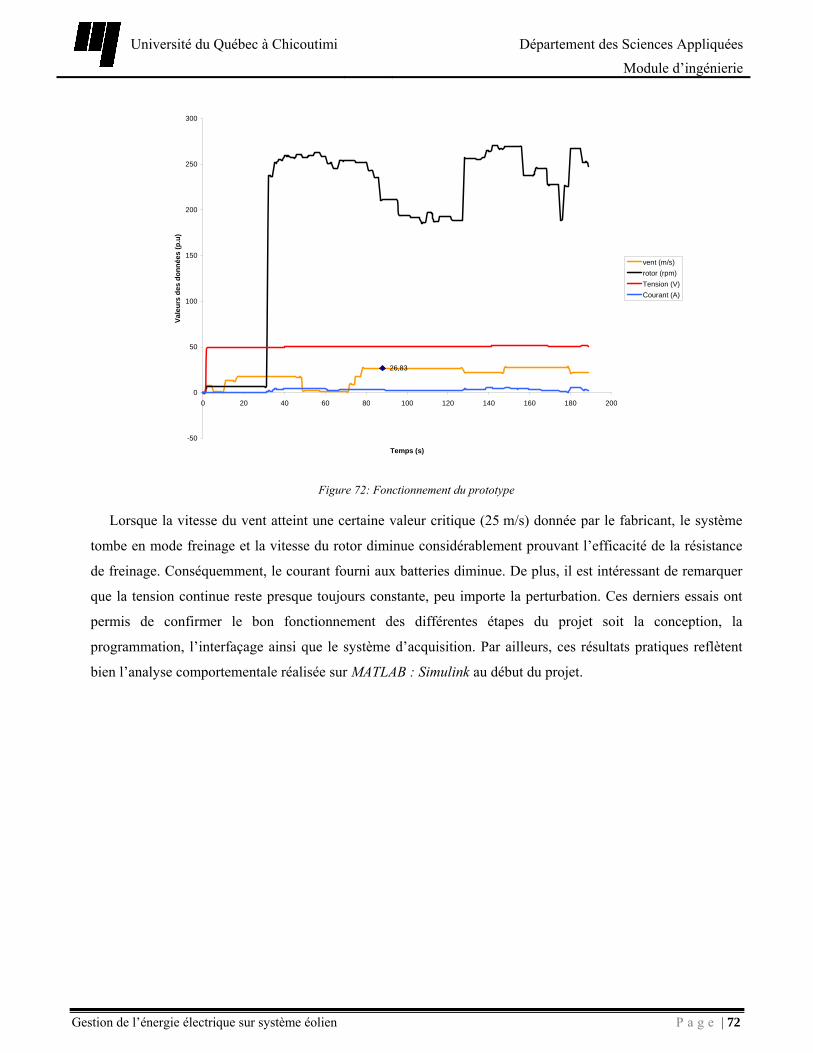
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 72
Figure 72: Fonctionnement du prototype
Lorsque la vitesse du vent atteint une certaine valeur critique (25 m/s) donnée par le fabricant, le système
tombe en mode freinage et la vitesse du rotor diminue considérablement prouvant l’efficacité de la résistance
de freinage. Conséquemment, le courant fourni aux batteries diminue. De plus, il est intéressant de remarquer
que la tension continue reste presque toujours constante, peu importe la perturbation. Ces derniers essais ont
permis de confirmer le bon fonctionnement des différentes étapes du projet soit la conception, la
programmation, l’interfaçage ainsi que le système d’acquisition. Par ailleurs, ces résultats pratiques reflètent
bien l’analyse comportementale réalisée sur MATLAB : Simulink au début du projet.
26,83
-50
0
50
100
150
200
250
300
0 20 40 60 80 100 120 140 160 180 200
Temps (s)
Vale
urs
des
donn
ées
(p.u
)
vent (m/s)rotor (rpm)Tension (V)Courant (A)
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 73
5 CONCLUSION ET RECOMMANDATIONS
Finalement, le projet de conception consistait à concevoir un prototype utilisant une éolienne et un système
d’accumulation pouvant fournir une puissance à une petite charge à une tension nominale de 120Vc.a. Il
s’agissait donc de développer un système de génération d’énergie électrique autonome qui sera remplacé par
une génératrice à combustion en l’absence de vent et d’énergie sur le système d’accumulation. Le système
devait comprendre une régulation de la vitesse de rotation de l’aérogénérateur, un système d’acquisition afin
de vérifier le comportement du système sur une longue période, un boîtier de commande dans le but de freiner
l’aérogénérateur manuellement dans une situation d’urgence ou lors de manœuvres d’entretien. Finalement, un
simulateur reproduisant les valeurs mesurées par le système d’acquisition a dû être conçu pour fin de
vérification et d’étalonnage du contrôleur. Toutefois, dû au manque de temps, le module électronique
permettant le démarrage de la génératrice à combustion commandé par le contrôleur n’a pas été conçu. Le
contrôleur a tout de même été programmé ainsi que l’électronique conçue en vue de l’installation de la
génératrice à combustion.
Ensuite, les résultats des essais en laboratoire confirment le bon fonctionnement du système global. En
effet, l’analyse comportementale à l’aide du logiciel performant SimPower Systems présente les mêmes
comportements sous les différentes situations possibles. L’utilisation de la résistance de freinage a été une
alternative très intéressante, peu couteuse, et fiable pour diminuer la vitesse de rotation de l’éolienne lors de
vent trop fort ou au besoin. En effet, un frein mécanique aurait occasionné un entretien plus fréquent et des
coûts plus élevés.
D’autre part, l’étude d’avant projet fut d’une grande utilité. Cela à permis de mieux comprendre les
différents principes relatifs au projet. Cependant, une telle étude ne reste pas infaillible. L’expérimentation, les
essais en laboratoire, l’application des différents principes restent un passage obligé à la réalisation d’un projet
de conception. À la fin de l’étude, plusieurs résultats furent gardés et d’autre non. Souvent ils ont été rejetés
pour des raisons économiques. Un système de freinage impliquant trois inductances connectées en Y a été
étudié, mais rejeté. Ce système permettrait de réduire les dimensions et ne dégagerait aucune chaleur. Dans la
prochaine phase du projet, ce système sera testé.
Par ailleurs, le travail qui reste à faire est d’installer une génératrice en harmonie avec le système. Les
principes sont en partie faits, mais restent à être testés. De plus, les contraintes climatiques ont fait retarder
l’installation permanente du projet et devront être reportées au printemps. De ce fait, les tests dans
l’environnement réel peuvent différer de ceux effectués en laboratoire, donc un étalonnage du contrôleur devra
être fait.

Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 74
6 BIBLIOGRAPHIE
6.1 Monographies
6.2 Notes de cours
6.3 Chapitres de livre
1. Slemon G.R, Straughen A. 1980. Electric Machines. Philippines : Addison-Wesley Publishing Company
Inc, 575 p.
2. Mukund R. Patel.1999. Wind and solar power systems.USA : CRC Press LLC.351 p.
3. Ackermann T. 2005. Wind Power in power systems. Angleterre : John Wiley & Sons Ltd. 961 p.
4. Wildi, T. 2005. Électrotechnique. 4e édition. Laval : Édition SK. 1215p.
5. CSA. 2002. Code canadien de l’électricité. Toronto : Association canadienne de normalisation. 597p.
1. Ouhrouche M. 2009. Notes de cours Électrotechnique II. Module d'ingénierie, Université du Québec à
Chicoutimi
2. Ouhrouche M. 2009. Notes de cours Électronique de puissance. Module d'ingénierie, Université du Québec
à Chicoutimi
3. Fofana I. 2008. Notes de cours Transport et exploitation de l'énergie. Module d'ingénierie, Université du
Québec à Chicoutimi
4. Bui H.T. 2008. Notes de cours Électronique II. Module d'ingénierie, Université du Québec à Chicoutimi
1. Multon B., Roboam X., Dakyo B., Nichita C., Gergaud O., Ben Hamed H. Aérogénérateurs électriques. IN
Techniques de l’ingénieur. Paris : Techniques de l’ingénieur. No vol. D3960
2. Noël, J-M. Énergie éolienne pour la fourniture d’électricité. IN Techniques de l’ingénieur. Paris :
Techniques de l’ingénieur. No vol. BE8585
3. Rapin M., Leconte P. Éolienne. IN Techniques de l’ingénieur. Paris : Techniques de l’ingénieur. No vol.
B4640v2
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 75
6.4 Sites web
1. DIGIKEY. Digi-Key Canada. [En ligne]. [http://parts.digikey.ca/]. Consulté le 23 septembre 2009
2. APPLIED MAGNET. Magnet 4 Less. [En ligne]. [http://www.magnet4less.com/index.php?cPath=8].
Consulté le 23 septembre 2009
3. INSPEED. Inspeed wind sensor, hand held wind meter, anemometer, storm chaser, weather instruments.
[En ligne]. [http://www.inspeed.com/]. Consulté le 23 septembre 2009
4. AUTOMATIONDIRECT. Automation Direct. [En ligne]. [http://www.automationdirect.com/]. Consulté le
23 septembre 2009
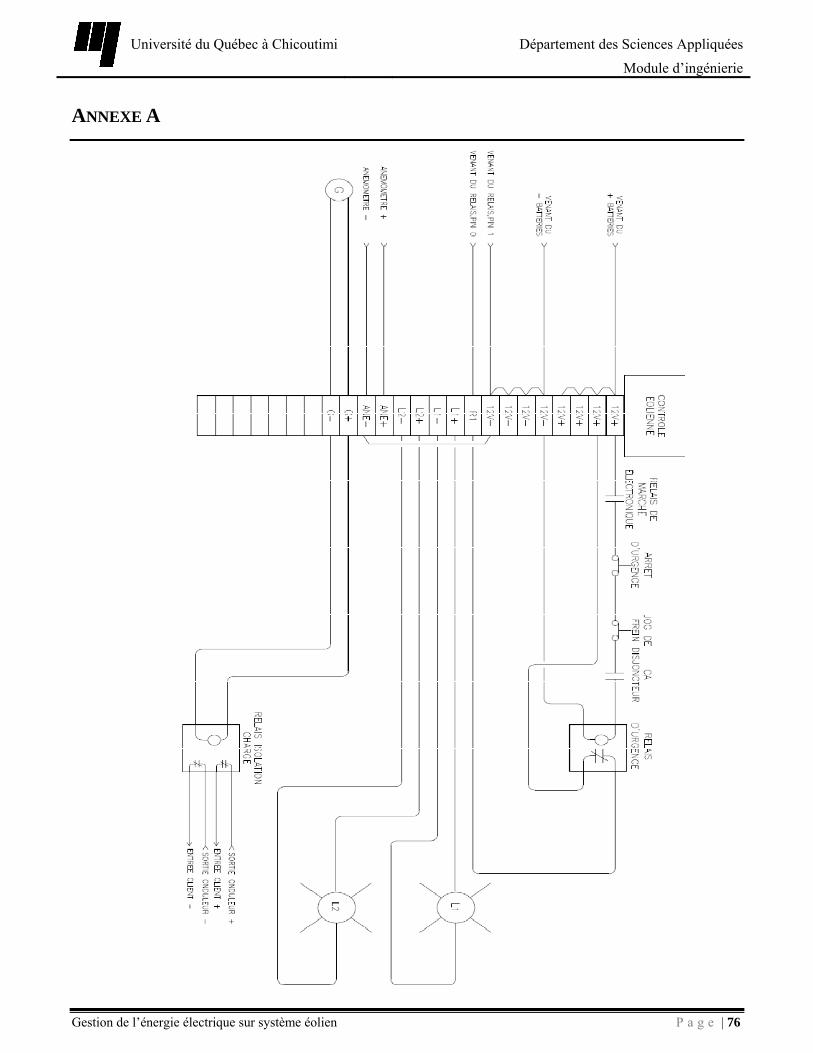
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 76
ANNEXE A
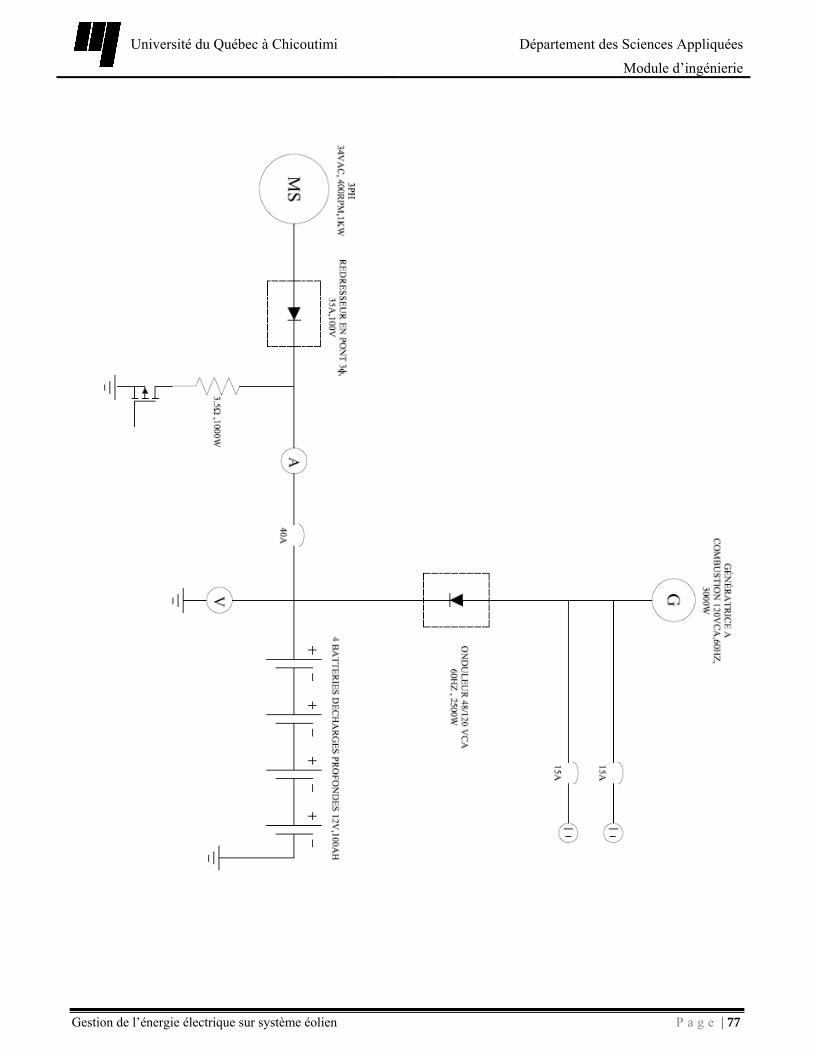
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 77
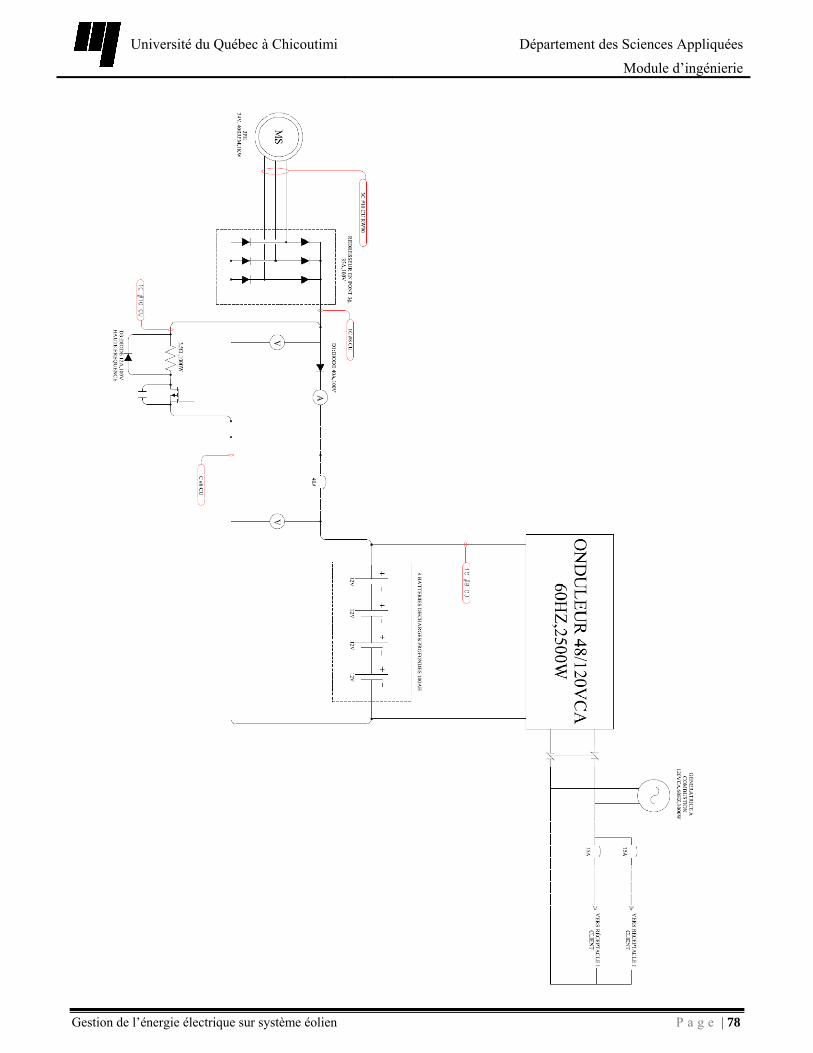
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 78
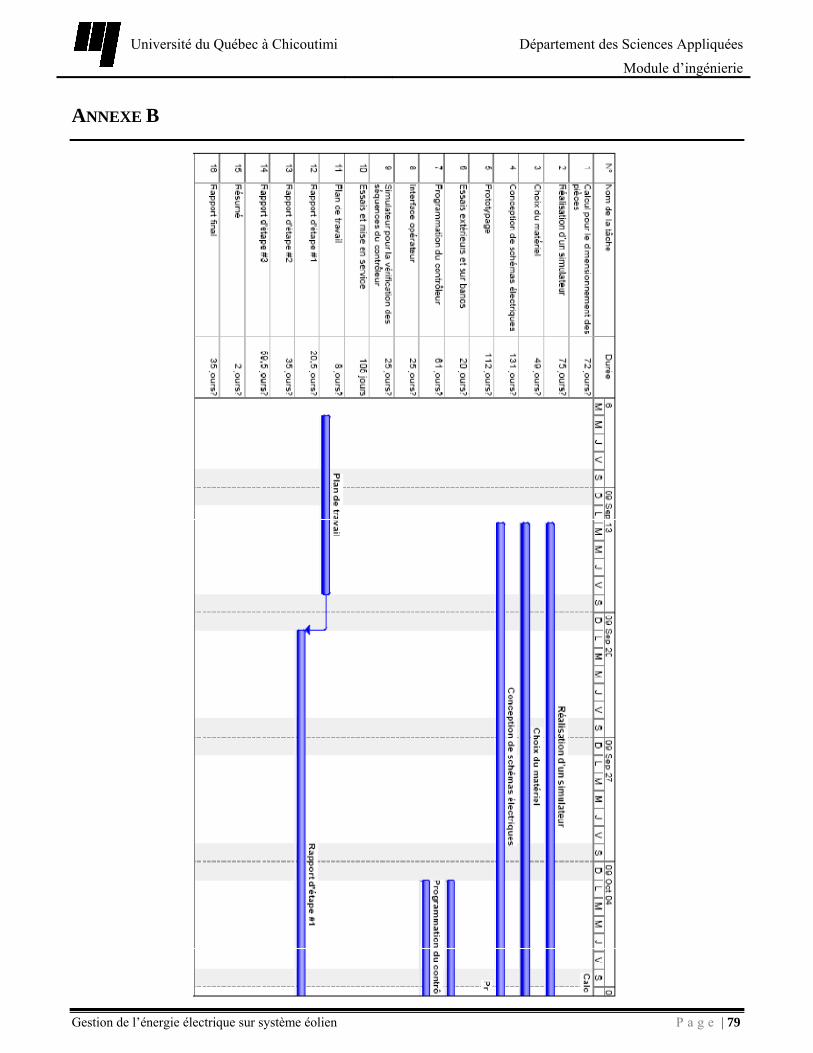
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 79
ANNEXE B
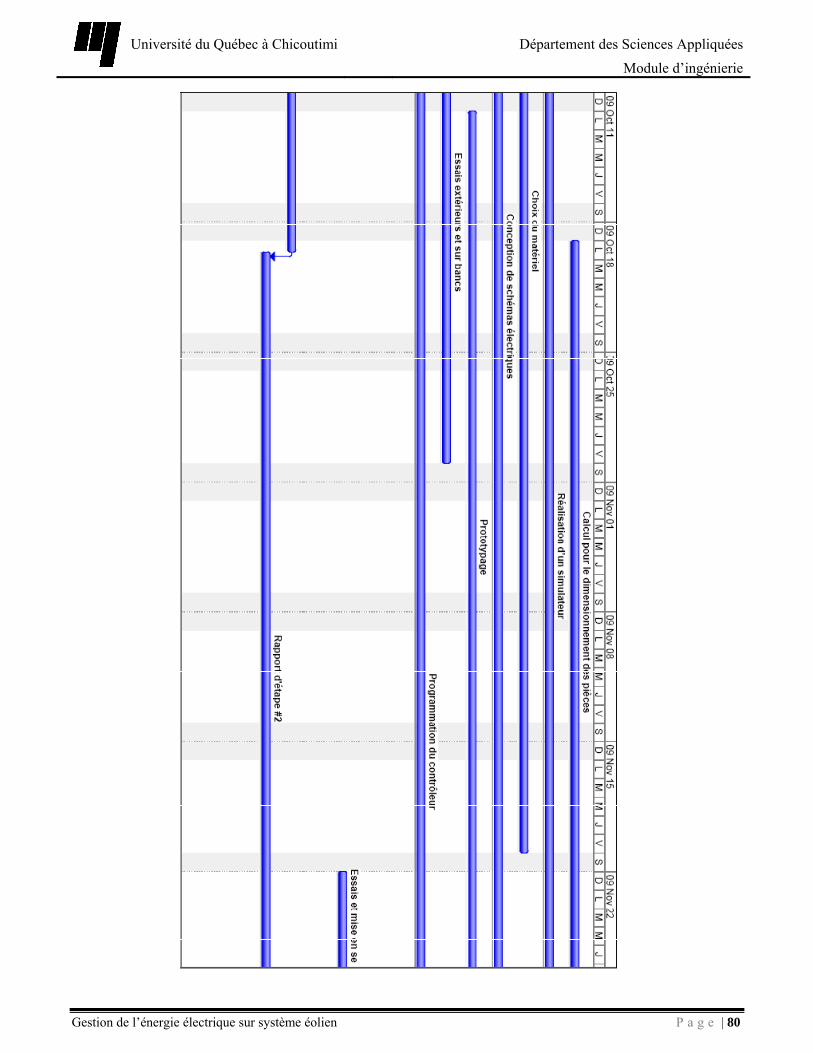
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 80
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 81
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 82
Université du Québec à Chicoutimi Département des Sciences Appliquées
Module d’ingénierie
Gestion de l’énergie électrique sur système éolien P a g e | 83