Embed Size (px)
Citation preview

PHI~NOMI~NES " HI~RI~DITAIRES " DANS LES SERVOMI~CANISMES ; UN CRITI~RIUM GI~N]~RAL DE STABILITI~ *
par Julien LOEB IngSnieur en Chef des P. T. T. **
SO~A~I~E. - - On gtudie un cas gdndral de servomgcanismes comportant des dldments dent le calcul cxige l' introduction de [onctionnelles ( hystdrdsis, relais, [rottements, engrenages affectds de ]eu, etc...)
Grdce d l'analyse harmoniq~e des fonctionnelles, on a p~ dtabtir un nouveau critdr~am de stabilit~ dent le crl- Mrium de NYQmST (oh la stabilitd conditionnelle apparait comme une mgtastabititd.) et celui de KOCHENUU~GEn ne sent que des cas particuliers.
Ce nouveau critJrium s'appllque, comme ce dernier, ~t une catdgorie de serr qu'on rencontre tris [rg- quemment dans la pratique (moteur dlectrique doug d'inertie).
On indique, de plus, le critdrlum permettant de sa~oir si tr rdgime d'oscillatlons spontandes possible est, ~t son tour, stable ou non.
J. INTRODUCTION.
Le mot (( 'Physique h6r6ditaire ~ a 6t6 forg6 par Vito VOLTERBA pour d6signer un ensemble de ph6no- m~nes tels que l'hyst6r6sis, le jeu des engrenages, les frot tements de COULOMB, etc ....
Les organes, si6ges de ces ph6nom6nes, sent carac- t6ris6s par le fait que la grandeur de sortie (angle, voltage, etc...) n 'est plus simplement une/onct ion de la grandeur d 'entr6e mais bien une /onctionnelle d6pendant des valeurs pass6es de la grandeur d'entr6e ou de ses d6riv6s.
L'6tude de M. COLOMnO [i] porte sur l 'utilisation de ces notions dans le calcul de la r6ponse des r6seaux lin6aires.
Dans une vole tou t h fait diff6rente, et h la pour- suite d 'un tou t autre r6sultat, MM. DUT~Ln [2 i e t K0CRENBUaGER [3] ont 6t6 amen6s h d6finir la ~( fonetion de transfert )) d 'un syst~me non lin6aire.
L 'obje t du pr6sent article est d '6tudier l 'analyse harmonique appliqu6e aux fonctionnelles, et d 'en montrer les applications aux syst~mes asservis dans lesquels on ne peut n6gliger l 'aspeet h6r6ditaire des ph6nomgnes. On indiquera no tamment un erit6rium tr~s g6n6ral de stabilit6 des syst~mes non lin6aires.
2. L'ANALYSE TEMPORELLE DES FONCTIONNELLES.
2A. Non-intervention des ~tats tr~s aneiens.
Les th6ories de VOLTERBA Ill se d6ve]oppent d 'une facon particuli~rement int6ressante si l 'on suppose que ]es 6tats du syst~me h une 6poque recul6e peu;cent gtre n6glig6s, et que leur action sur l '6volu- t ion future est d ' au tan t plus faible que l '6poque en question est recul6e. Telle qu'elle est exprim6e, ] 'hypoth~se risque de ne pas ~tre toujours v6rifi6e dans les cas pratiques : nous n 'en voulons pour
preuve que la conservation du magn6tlsme dans les aimants permanents .
En fait, l 'hypoth6se devient parfa i tement j ustiii6e si le syst~me est soumis h une excitatio,, cyclique, semblable au processus de d6saimentation d 'un circuit magn6tique au moyen d 'un courant alter- nat if progressivement d6croissant.
-,-.~ 9 Les deux conceptions de fonetionnelles. Nous aliens par t i r de la notion de fonctionnelle
tellc qu'elle est expos6e dans le t ravai l pr6cit6 de M. COLOMBO Ill. La d6finition premiere de la fonc- tionnelle : (r y est fonction de routes les valeurs de x)), ne fait pas intervenir h proprement parler une varia- t ion de x en fonction du temps : ce qui est impor tan t pour cette d6finition, c 'est de classer ces valeurs d'apr~s un crit6rium de causalit6. La fonctionnelle, vue sous cet aspect, ne d6pend pas des intervalles de temps qui s6parent effeet~vement les diverses
d allleurs fonction d 'une valeurs de x. C'est ' " une infinit6 de variables.
Prenons par exemple un barreau de fer aimant6. L ' induct ion B d6pend de la suite des valeurs des champs excitateurs H, sans d6pendre du temps qui s'6coule entre chacune de ces valeurs. En particulier, si, apr~s avoir appliqu6 uu champ exci ta teur 6lev6, on cesse h nn instant donn6 de le faire, le barreau reste aimant6 ind6finiment. Ceei n'est vrai que si la succession des divers 6tats n 'est pas t rop rapid~.
Selon VOLTEaBA [1], on suppose que la variable x est h son tour une [onction connue du temps, y devient alors une fonction du temps, dent la connais- sance n6cessite :
l ~ ]a connaissanee de ]a loi fonctiomlelle (lois du magn6tisme par exemple),
2 ~ la loi de var ia t ion de x en fonetion du temps. Dans ce qui va suivre, la loi 2 ~ sera h la disposition
du mathSmaticien, const i tuant un outil d 'explora- tion de ]a fonctionnelle.
* Get article a fait l'objet d'un expos6 oral le 26~ octobre 1951, dans le cadre des Con#rences du CENTI1E D']~TUDES DE LA MI~CANIQUE D~3 VOL, organis6es par la Section des Engins Sp~ciaux du SERVICE TECm~XQVE DE L'AERONAUTIQUE.
** Au C. N. E. T., Chef du D6partement Tt~LECOMMANDE et CONTRE-MEsuREs.
[ ] Pour tout renvoi entre crochets se reporter in fine h la bibliographie.
- - 346 - -

t. 6, n o 12, 1951] P U I ~ N O M E N E S (( H I : H I I ' D I T A 1 R E S ))
L'avantagc d'une telle fa(~on de proc6der est double : d'abord, le t ra i tement math6matique des problSmes est facilit6, puisque, au lieu d 'une fonetion d 'une infinit6 de variables, on n'a plus affaire qu'~ une fonction du temps.
De plus, on a gagn6 en g6n6ralit6. En effet, le sch6ma de ]a fonctionnelle correspondant 'h l 'aiman- tat ion d 'un barreau est loin d'6tre le plus g6n6ral. Les effets d'inertie, dans la plupart des applications, se m61angent int imement aux ph6nom6nes h6r6di- taires, et on ne peut pas, en g6n6ral, nbgliger la rapidit6 avee laquelle d6filent dans le temps les diverses valeurs de x. Par exemple, un train d'engre- nages pr6sentant du ]eu ne r6pond au premier sch6ma que si l 'on n6glige les d6formations 61as- tiques. D6s que l'on dolt analyser le probl6me de plus pr6s, on volt que la r6ponse (mouvement de l 'engrenage men6) d6pend beaueoup de la vitesse de l 'engrenage qui l 'a t taque.
2,3. Analyse eyel ique des fonet ionnel les .
Le prenfier souei de l'ing6nieur qui eonstruit des servom6canismes est d 'obtenir la stabilit6. I1 est ainsi conduit h examiner les r6gimes d'oscillations p6riodiques, pour savoir quelles en sour les conditions d'entretien.
11 est done tout naturel d 'empioyer comme fonc- tion x(t) une fonction sinusoidale.
L'hypoth~se de non-intervention des 6tats aneiens, formul6e et pr6cis6e au d6but du paragraphe 2, permet de consid6rer y comme une [onction pdrio- dique du temps, ayant ]a m~me p6riode que cellc qui donne x.
Dans de nombreux probl6rnes de servo- m6eanismes, nous pourrons, en premiere approxi- marion, nous contenter de l '6tude de la composante fondamentale de FOURIER de cettc fonction p6rio- dique.
C'est ainsi que, dans son travail d 'avant-garde sur les servom6eanismes (( tout ou rich )) eomportant un moteur 61ectrique, J. l/. 1) UTILH a montr6 [2 t que l'on ne eommet qu'une erreur n6gligeable en sc contentant de considfrer la composaute fondamen- tale du mouvement des l)i~ees m6caniques, qui constituent un tiltrc passe-bas tout "h fait suflisant.
Le mot (~ filtre )~ a ici un sens partieulier. I1 ne s'agit pas d 'un syst~me qui coupe des fr6quenees sup6rieurcs 'h une valeur d6termin6e, mais bien d 'un syst~me qui att6nue, en valeur relative, les harmo- niques d 'une fondamentale, quelle que soit cette derni~re.
Par exemple, la plupart des syst~mes de t616eom- mande, eomportant des pi~ees m6eaniques en mou- vement, sont d6fini~ par des fonetions de transfert comportant au d6nominateur un polyn6me du 3 e degr6 en p.
Par ailleurs, les organes non lin~aircs en usage dans les servom6canismes sont impairs. Le premier harmonique qui apparah est ainsi l 'harmonique 3. L'organe qui donne l 'harnmnique 3 le plus fort est le relais fonctionnant en (( tout ou rien )). Cet harmo-
DANS LES SERVOM~:CANISMES 2/7
nique a alors une amplitude 6gale h ]/3 de celle du terme fondamental.
Dans ee cas, apr~s '.( filtrage ~), le rapport entre les amplitudes de l 'harmonique 3 et du terme fonda- mental est de 1/27.
Nous pouvons ainsi, en premiere approximation - - tr~s souvent suffisante - - faire correspondre h une grandeur d'entr6e sinusoidale une grandeur de sortie sinuso~dale de nl~,me fr6quence.
Le rapport complexe entre les deux grandeurs sera une v6ritable ]onctlon de trans[ert.
I1 existe 6videmment entre cette fonction et les fonetions de transfert que nous avons l 'habitude de manier une diff6rence fondamentale : en plus de la [rdquence, l'amplitude de la grandeur d'entr6e dolt entrer en ligne de compte dans le caleul du nombre complexe A.
Cette fa~on de voir les choses comporte comme cas particulier l '6tude cyclique des syst~mes d6finis par une /onction non lin6aire (d6tecteur par exemple).
L'analyse harmonique d'une fonctionnelle permet ainsi, si l'on se contente de la composante fondamen- tale, de simplifier consid6rablement l '6tude : il suftit de consid6rer un nombre complexe A(x, co) fonction de l 'amplitude et de la fr6quence du signal d'entr6e.
3. CRITt~RIUM GI~ZlNt~"RAI. DE STABILI'FI~,
3,1. Repr6sentat ion g6om6trique des propri~t6s des fonet ionne! les .
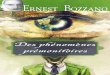
Le fair que le nombre complexe A, repr6sentant un 616ment d 'un servom6canisme, d6pend en g6n6ral de x (amplitude de la sinusoide d'entr6e) et de r
CUe
COl ~'"- ~o
co~po san te s i,~aginaires
/
.%
I:IG. 1.
co~#osa, t tes erdel, Ze.,s
(pulsation) conduit h tracer non plus (comme dans le cas lin6aire) un diagramme A(jr mais tout un r6seau de courbes. Par exemple, il sera commode pour le calcul et surtout pour l'exp6rience, de tracer les courbes h x constant, marqu6es suivant les valeurs de 6) (fig. It.
- - 3~7 - -

3/7 a. LOEB
Une propri6t6 g6n&ale des courbes relatives aux syst~mes physiques sera la cons6quence des satu- rations in6vitables : pour les valeurs de x sufll- samment 61ev6es, la valeur de ]A] devient petite, et tend vers z6ro h routes les fr6quences lorsque x--+oo.
S'il y a un scull x0, [A] est nul pour routes les valeurs de x inf6rieures h x 0.
3,11. Cas du pdle it l'origine.
Que deviennent les eourbes lorsque le syst~nle comporte un 616ment int6grateur donnant dans le cas lin6aire un p61e h l'origine ? Prenons eomme exemple un moteur 61ectrique ~ombin6 avec des
[ANNALES DES T1~LgCOMMUNICATIONS
O
Fro. 3.
Trar son r&eau caract6ristique sur le plan de la variable complexe (fig. 4).
Si le syst6me est tel que, par It point critique de coordonn6es - - i e t 0j, passent 2 courbes du r6seau (courbe x = X et co = f~) le syst~me est instable,
8
s sl s
F1G. 2.
I Fie. ~.
, ,X /
circuits pr6sentant des ph6nom~nes de saturation. On at teint le r6sultat en tra~ant les courbes corres- p0ndant h des valeurs de x sans cesse croissantes (fig. 2).
La courbe x -- 0 correspond au cas lin6aire bien eonnu.
L 'augmentat ion de x correspondra h un gain [AI de plus en plus petit: Si X est la valeur constante de la grandeur physique de sortie, le gain eorrespondant
x est 6gal h eelui qui correspond h x = 0, multipli6 par X/x . On transforme ainsi par homoth6tie la eourbe x = 0.
La courbe x = cxz sera r6duite au demi-axe imagi- naire n6gatif. Pour co = 0, le gain prend la forme ind~termin6e :
1 0.oo.(-j)
mais le point figuratif reste sur le demi-axe imagi- naire inf6rieur.
3,2. Le r #nfiral de stabilitfi. Soit un servom6canisme constitu6 (fig. 3) par un
616ment non lin6airc, pouvant ~tre le si6ge dc ph6no- m~nes h6r6ditaires, et d6fini colnme indiqu6 ci- dessus, par sa fonction complexe d6pendant de deux variables k(x; co).
et il s 'y instaure un r6gime oscillant permanent, caract6ris6 par l 'amplitude X et la pulsation ~ .
Ce r6sultat d6jh signal6 dans leur cas particulier par MM. Du' rTL~ c t KOCIIENBURGER [2] e t [3], e s t
drl au fair quc le discriminateur (ou diff6rentiel) D de la figure 3 introduit un ehangement de signe.
Si g est ]a grandeur d'entr6e et y la grandeur restitu6e, D provoque l 'application "a l'entr6e de l 'amplificateur A d'une grandeur g - y.
Nous 6tudions en cc moment le r6gime d'oscilla- tions spontan6es, c'est-h-dire que nous r a i s o n s g = 0.
Dans ees conditions, le r6ghne d'accrochage corres- pond h l'existence, aux bornes d'entr6e repr6sent6es par le point E de la figure 3, d 'une grandeur - - y.
Ceei repose toutefois sur un ehoix partieulier du point o6 l 'on coupe la chalne. La grandeur de sortie ne s'exprime simplement 7 - avec la pr6dominance de la fondamentale - - que si la grandeur d'entr6e se rapproehe suffisamment d 'une grandeur sinusoidale. I1 faut done pratiquer la eoupure en un point off les harmoniques ont 6t6 le mieux filtr6s. Le crit(~rium propos6 sera alors le suivant :
Tracer le rdseau des courbes A(x, o~). Ce r&eau occupe en gdndral une portiou R limit&
du plan. Si le point critique - - ~ q- jO eat en dehors de R, le systOme est stable, car il n'existe pas de couple
348

t . 6, n ~ 12, 1951]
de ~,aleurs x et 6)satis/aisant au.~: conditions requises pour l'entretiet~.
Si le point critique - I -l- jOcst d.ns 1( le S!lStbnw pent oscilIer, et le r@ime (lUi s'inslanre cst ddfini cn amplitude et en /r~quence pLu' les courbes d,t rdscau qui passent au point critique.
Le w 4 donncra un crit6rium (h' stabilit6 dc ce r6gime auto-oscillant.
3,3. Retour au eritfirium de Nyquist. La th6orie ci-dessus expos6e permet une inter-
pr6tation physique tr~s simple du crit6rium de NYQUIST.
[" 3,31. Stabilitd inconditionnelle. L
Soit un syst~me d6fini par la courbe I (fig. 5) dans la r6gion lin6aire des caract6ristiques.
Un systgme physique quelconque a ses amplitudes limit6es par les ph6nom6nes de saturation.
PtII~NOMI'~NES (( III'~]RI~:DIT&IRES )) DANS LES SERVOMI~CANISMES 4/7
d'instabillt6. Or l 'augmentat ion de l 'amplltude a fatalement [)our effct de diminuer lc gain.
Nous pouvons tracer le r('seau de courbes qul, dans lc cas de stabilit5 conditionnelle, st pr6sentent, par excml)l~, , scion la figure 6.
FIc . 5.
t
La courbe I cst consld6r6e ici comme la courbe limite (correspondant '5 x = 0) d 'un r6seau corres- pondant aux diff6rents degr6s de saturation dont les courbes x = cons)ante se d6duisent de I par des homoth6ties de rapports inf6rieurs h ~.
Si la courbe I entoure le point critique, il y a sfirement une des courbes (II) du r~seau qui y passe.
Nous avons ainsi prouv6 qu'ii est possible qu'une oscillation s'amorce, l 'amplitude 6tan) telle que le gain soit plus petit que dans lc cas lin6aire. La courbe I correspond ainsi "hun systSme identique au premier (h part le gain plus 61ev6) et donne donc un r6gime instable.
Si au contraire le point critique n'est pas entour6, aucune des courbes du r6seau n 'y passe et le systi.'me est stable.
3,32. Cas de la stabilit6 conditionnelle.
La pr6sente th6orie permet de montrer que la ,< stabilit6 conditionnellc ~) est en fair une mdtasta- bilits
En effet, la r6duction du gain, commc il est connu, fait passer le syst~me d 'un 6tat stable h u n r6gime
~o [J~:} ~ 0
FIG. 6.
Si le r6seau va jusqu'fi la courbe marqu6e x,~, le syst~me peut osciller.
Si le r6seau n 'a t te int pas cette r6gion (par exemple dans les syst~mes rotatifs l 'amplitude des mouve- ments est limit6e h 180~ le syst~me est stable pourvu que le gain soit maintenu.
Note crit6rium s'applique donc aussi au cas de la stabilit6 conditionnelle, et permet en plus de pr6voir le domaine d'amplitudes correspondant h la zone de m6tastabilit6.
3,4. Critfirium de Kochenburger [3]. Lc crit6rium de KOCItENBURGER qui, comme
l'6tude pr6cit6e de DUTILff , s'applique aux servo- m6canismes ~ tout ou rich ,, tels que eeux que commande un relais, est un cas particulier de la
Fro. 7.
th6orie ci-dessus expos6e. I1 comporte, on le salt, le trac6 de deux courbes (fig. 7) l 'une I cot6e suivant les fr6quences et qui d6crit la partie lin6aire du r6seau, et l 'autre II, cot6e suivant les amplitudes et q u i d6crit les propri6t6s du syst~me (( tout ou rien)) de c o m n l a n d e .
Si les deux courbes se coupent en un point A
(*) I1 ne fau t par n6o'li~'~,r, , lans ce ear, la possibil i tb de r@imes au l o -on t r e l enus clans lesquels l ' angle auf fmente de fa t on s6culaire [4].
349 - -

5/7
l'oseillation s'6tablit avee l 'amplitude x et la pulsa- tion o~ lues en A sur ehaeune des courbes.
KOCnENnCnGEa a aillsi trait6 les eas oft notre fonetion A(x, co) se d6eompose en un produit de deux fonetions a(x) • b(to). Sur la figure 7, la eourbe I repr6sente l ' inverse de b(to). I1 a ainsi suppos6 que le systbme eomporte comme seul 616ment non lin6aire un 616ment dont on peut n6gliger eompl~tement les effets d'inertie, ou en tous eas les reporter sur la partie lin6aire du syst~me.
Cette simplifieation eorrespond assez exaetement h la premiere conception de la fonetionnelle (para- graphe 2,2).
M~me dans le eas oft eette conception correspond une r6alit6, son domaine de validit6 dans la gamme
des fr6quences est fore6ment limit6 : dans un relais, l ' inertie et l'61astieit6 de l 'a rmature finissent par intervenir ; dans un barreau aimant6, la perm6a- bilit6 varie avee la fr6quenee, etc.
Or (voir no tamment G. LEHMANN [5.]) les pro- pri6t6s d 'un syst6me boucl6 doivent ~tre - - pour la recherche de la stabilit6 - - examin6es dans un domaine de fr6quences beaucoup plus large que celui qui sert h d6crire son fonctionnement en r6gime d'utilisation.
I1 peut donc trhs bien s ' instaurer des r6gimes d'oscillation met tan t en jeu des propri6t6s dyna- miques des appareils, que l 'on aura dfi n6gliger pour s6parer la fonction de x de celle de to.
L'6tude du paragraphe 3,2 6ri te cet inconv6nient et constitue ainsi un crit6rium tout h fair g6n6ral.
6. S T A B I L I T E DU R I ' G I M E O S C I L L A T O I R E ,
Le nouveau crit6rium de stabilit6 des servom6- canismes non lin6aires indiqu6 ci-dessus ne serait pas complet s'il n '6tait accompagn6 d 'un crit6rium compl6mentaire pe rmet t an t de pr6voir la stabilitd du rdgime osciUatoire dans le eas off il est possible,
Si en effet le r6gime d6fini par les deux eourbes x = x o ; to = to o passant par le point - - I n 'est pas lui-mgme stable, il ne doit pas t~tre eonsid6r6 eomme un inconv6nient pour le servom6canisme 6tudi6.
4,J. l~tude de la stabilit~. Les trait6s elassiques [6] eontiennent beaucoup de
renseignements sur la stabilit6 des r6gimes oscilla- toires non lin6aires, mais ces th6ories se l imitent au cas de l '6quation non lin6aire du second ordre.
Or ]es m6thodes d 'analyse harmonique dont nous avons ci-dessus 6tendu le domaine d 'application h une classe tr~s courante de servom6canismes non lin6aires, ont le m6rite de s 'appliquer "~ des 6qua- tions d 'un ordre quelconque.
Ce serait une entreprise d6sesp6r6e, croyons-nous, que de cherctler h faire une th6orie g6n6ralisant celle de PO~CAn~ pour des 6quations d 'un ordre quel- conque.
Mais nous pouvons par contre t irer le plus large profit de l 'hypoth6se fondamentale qui limite la
J . ]LOEB [ANNALES DES TI~LI~COMMUNICATIONS
classe de servom6canlsmes que nous 6tudions et que nous rappelons eomme suit :
(( A chaque excitat ion sinusoidale du syst6me correspond, grace l 'effet de filtrage du inoteur, une r6ponse sinusoidale d~pendant de I 'amplitude x et de la pulsation co de l 'excitation. ))
Soit donc un servom6canisme d6fini par la fonc- tion de t ransfer t A(x, to) et susceptible d 'entrer en oscillation pour un couple de valeurs x0 et co() de x et de to, qui annule l 'expression I-4- A(x, @.
Cherchons ce qui se passe ]orsque l 'on fair varier x de la quanti t6 3x autour de xo.
Le r6gime - - sinusoidal par hypoth6se - - n 'est plus stationnaire. La tension d'entr6e y peut alors ~tre raise sous la forme :
(]_) y : - X ei[ 0)'~ ~llt.
C'est un r6gime (( pernmnent )) au sens de celui que d6crit M. A. ANGOT [6].
Si ~ est positif, l 'ampli tude a tendance 5 d6erohre. Si ~ est n6gatif, elle a tendance "h croltre.
Cas oh ~ ale m~me signe que ~x. - - A u n e augmen- ta t ion accidentelle de x, le syst5me r6pondra par l ' introduction d 'un amortissement positif ~, qui aura pour effet de diminuer x.
La r6ponse aura 6galement pour effet de ramener l'oscillation h l 'amplitude x 0 si, au lieu d 'une augmen- ta t ion accidentelle, on avait une diminution.
Cas oit ~ aun signe contraire dt cehd de ~x. - - Dans ce cas, une augmentat ion accidentelle de x introduit un amortissement n6gatif, et l 'ampli tude augmente.
Le crit6rium compl6mentaire sera ainsi le suivant : ~/&,: positif. - - Le r6gime oscillant est stable. @3x n 6 g a t i f . - Le r6gime oscillant est instable,
4,2. Caleul de ~..
On sait (voir no tamment [6~) que sl un r6seatl ayan t une r6ponse A(to) t ransforme la grandeur d'entr6e cissoYdale e jc~ en la multipliant par A(jr i] enes t de m~me lorsque ]a grandeur d'entr6e est un r6gime (( permanent )) eJ (~ ; la grandeur de sortie s 'obtient en multipliant la grandeur d'entr~e par A[ j (o + j~)~.
Un r6gime ~( permanent ~) d 'ampli tude x 0 :~ ~x s'6tablira avec une pulsation r + ~r et un amor- tissement r162 reli6s par l '6quation de bouclage :
(2) l + A [ x o + ~ X , r + ~r + jcr = 0.
eosons A = U(x, to) + iV(x, o~). La connaissance de A d6finit une repr6sentation
du plan des x, to sur le plan des U, V. (ttien ne fair supposer, d'ailleurs, que cette repr6sentation soit analytique.)
L '6quation (2) devient :
En 6galant h z6ro les parties r6elle et imaginaire, on obtient un systbme de deux 6quations lin6aires qui
- - 350

t. 6, n o 12, 19511
donnent, en fonO-ion de ~x les grandeurs chcrch6es ~o et ~. Ce son t :
b
8x L~x b~ bo~ b:~'
On en d6duit le crit6rium de stabilit6 suivant : le r6gime oseillant est slable, si pour x et o~ donuant A~ = - - 1, on a :
DU b V bU b 1" (5) ~,~ b~--<~o.,-b:~ > o.
I1 e s t i n s t a b l e d a n s ]e otis eoulraire.
PH~:NOMI~NES (( I I E R I ~ D I T A I R E S )) DANS LES SERVOMI~CANISMES 6/7
% T I I I I I I
%
03
pour effet l 'existence d 'un autre r6gime, stable celui-ci, d6fini par d 'autres valeurs x et (o.
4,4. Appl icat ion.
Soit uu servom6canisme d6fini pour les faibles valeurs de x par la fonction de t ransfer t :
l
Tp( l + T~p + T~,p 2)
L'existcncc des saturations se t raduira par la pr6senee suppl6mentaire d 'un faeteur
T T x b(x) T-T ~gal ~'~ J. pour x-~-x o
Le r~seau de courbes sera eelui de ]a figure lO off les courbes se d6duisent de la eourbe x ---- 0 par homoth6tie.
co co,~s ta,~ t x c r o i s s a n t s
V
U ~
a ) P l a n d e s x , t O b) Plan des U,V FIG. S.
4,3. Interpretation g ~ o m ~ t r i q u e . - (5) peut s'6crire :
i 'al : "a [.!'
~ o ) ) ' \ a co /
Le d 6 t e r m l n a n t qu i f igure au n u m 6 r a t e u r est ]e v)
Jacobien ~ de la t ransformat ion qui permet de
passer du plan des (x, co) au plan des ( U, V). Son signe indique le sens du parall6Iogramme ~x, 8o~ (fig. 8 b) correspondant au rectangle 8x, ~co (fig. 8 a).
La figure S correspond h un Jacobien positif : un observateur debout sur le plan de ]a figure voit lc vecteur 8x sur sa droite ct le vecteur 8co sur sa gauche, que cc soit dans le plan des U, V ou dans cclui des x, (o.
La figure 9 indique ce qui strai t un r6gime A = --- i instable.
Dans ce cas, les saturations in6vitables auront
Le parall61ogramme 3x, 3to est positif et nous sommes dans le cas de la figure 8, L'oscillation est
to -, r / x crOtssO;;t8 �9 s �9 const.
C~'O{ $${mt$
FIG, 9.
stable, et le servom6canisme est bien, au sens ordi- naire du mot , instable.
On pcul v6rifier le r6sultat en d6veloppant b
- - 35l ---

7/7
O) croissants
x croisscmts
/~=r /~=~ Fro. 10.
auivant les puissances eroissantes de 8x (en s'arrg- rant au premier terme) :
A(x, to)-~ l - - T--~2 rr + Tlo~l__T~r ).
v) Le Jacobien ~ - - 5(x, r est alors ~ - aV---~
quantit6 positive.
O. P E R F O R M A N C E S DES SERVOMECANISMES.
II faut 6videmment abandonner dans le calcul de la r6ponse d 'un servom6canisme non lin6aire, les m6thodes telles que la t ransformation de LArLAC~, qui implique la 16gitimit6 du principe de superpo- sition.
La consid6ration des fonctions A(~,~) Y _ i + A ( x , @
donne tou t de mgme une id6e de la rapidit6 avec laquelle le syst~me r6pond (au moins h une exci- tat ion sinusoidale).
A chaque valeur de x correspond une pulsation c( de coupure )) to, pour laquelle i YI devient inf6rieur h l 'unit6.
Dans un syst~me pr6sentant une saturation - - et quel syst~me n'en pr6sente pas ? - - la pulsation o), diminue quand x augmente.
I1 n'est pas trbs exact de d6finir la rapidit6 de r6ponse d 'un syst~me dit lin6aire par sa pulsation de coupure calcul6e en r6gime lin6aire. Prenons par exemple une t616commande de position, dans laquelle, si l 'on veut obtenir des performances acceptables, le domaine de lin6arit6 est de l 'ordre du degr6. La r6ponse du syst~me h u n 6chelon- unit6 de 40 degr6s n'est pas la mgme que si l '6cart initial 6tait le demi-degr6.
J. LOEB [ANNALES DES T~L~COMMUNICATIONB
Le renselgnement donn6 par les courbes A(x, co), que l'on peut reporter sur un diagramme de BLACK, reprend toute sa valeur si l 'on applique les m6thodes de balayage comportant l 'emploi d'une ~ fr6quence porteuse )) (cf. nne 6tude du m~mc auteur : (( De la ni6canique lin6aire h la m6canique non lin6aire, [7]).
Ici on est maitre de l 'amplitude et de la fr6quence de la sous-porteuse, et l 'analyse harmonique peut ~tre utilis6e h plein malgr6 ]e caract6rc non lin6aire du syst~me.
5. CONCLUSION.
L'6tude des servom6canismes comportant des 616merits difficiles h d6crire au moyen des m6thodes analytiques habittfelles (relais, circuits h hyst6r6sis, engrenages affect6s de jeu, frot tements non propor- tionnels h la vitesse, etc.) peut gtre entreprise avec succ~s au moyen de l 'analyse harmonique.
On a 6t6 ainsi amen6, en ne consid6rant que les composantes fondamentales des grandeurs pdrio- diques, h indiquer :
1 ~ un critdrium tr~s gdndral de stabilitd dont ceux de NYQUIST et de KocnE~'nUnaEa apparaissent comme des cas particuliers ;
20 un critdrium donnant la stabilitd d'un rdgime possible.
I1 me reste h remercier M. Serge COLOMBO, at ta- ch6 au C. N. R. S., pour l ' information qu'il m'a donn6e en mati~re de ,( physique h6r6ditaire ,, et M. Gilbert CAUEN, Ing6nieur en Chef du G6nie Maritime, dont les remarques m'ont amen6 '~ pr6eiser certains points de l'expos6.
B IBLIOGRAPH IE
[1] COLOMBO (S.), La transformation de LAI'LAC~ et l'6tude des ph6nom~nes transitoires. Ann. Tdld- communic. (Fr.) (juin t949), 4, n ~ 6, pp. 210-222.
[2] DUTILH (J. R.), Tb6orie des servo-m6canismes non lin6aires. Radio (Fr.) (mai t950), n ~ 5, pp. 1-7. Onde Electr. (Fr.) (octobre 1950), 30, n ~ 283, pp. 438-445.
[3] KOCHENBUaGER (R. J.), Analyse du fonctionnement des servom6canismes du type pas h pas, /t l'aide d'une m~thode fournissant la r6ponse en fonction de la fr6quence. (Analysing contactor servome- chanisms by frequency-response methods.) Electr. Engng. (U. S. A.) (ao6t 1950), 69, n ~ 8, pp. 687- 692.
[4] MINORSKY (N.), Introduction h la m@anique non lin6aire. (Introduction to non linear mechanics.) S. W. Edwards, Ann. Arbor, Michigan (U. S. A.) (1947), 464 p.
[5] LErIMANN (G.), Progr~s r6cents dans la conception des servom6canismes et syst~mes de t616com- mande. Office National d']~tudes et de Recherches Adronautiques. Conf@ences (Fr.) (mai-juin 1947), 50 p.
[6] ANGOT (A.), Compl6ments de math~matiques h l'usage des ing6nieurs de l'61ectrotechnique et des t~16communications, l~dit, de la Recue d'Optique (Paris) (1949), 660 p.
[7] LOEB (J.), De la m6eanique lin6aire h la m6eanique non lin6aire. Ann. Tgldcommunie. (Ft.) (f6vrier 1950), 5, n ~ 2, pp. 65-71,
352