-
PHQ111 Mécanique
Buts :� Déterminer la résultante d'un système de forces
concourantes.� Calculer les moments de force d'un système mécanique
en équi-
libre.� Mesurer le temps de descente de di�érents cylindres sur
un plan
incliné.
Devoir à remettre à votre arrivée au laboratoire :
1.5 m
2.5 m
L 1M 2M3M
Trois masses sont en équilibre sur une balançoire dont on
néglige la masse. Si les massesM1 et M2 valent chacune 10 kg, et
que la masse M3 vaut 30 kg, calculer la distance L quipermet de
maintenir cet équilibre. Utiliser le fait que s'il n'y a pas de
rotation, la sommedes moments de force doit être nulle.
1 Théorie
1.1 Forces concourantes
Les quantités physiques mesurables se divisent en deux
catégories : les scalaires et les vec-teurs. Une quantité scalaire
est caractérisée par un seul nombre (qui représente la grandeurde
cette quantité dans des unités appropriées), alors qu'un vecteur
est caractérisé par unegrandeur et une direction. Par exemple, pour
spéci�er complètement la vitesse d'une parti-cule, on doit donner
sa grandeur et sa direction, donc la vitesse est une quantité
vectorielle.Par contre, la masse d'un solide est une quantité
scalaire car seule sa grandeur est nécessairepour qu'elle soit
complètement dé�nie.
Dans le cas où plusieurs forces agissent sur un même point, on
parlera de forces concourantes.Lorsqu'on est en présence de forces
concourantes, on peut montrer que celles-ci peuvent êtreremplacées
par une seule force appelée résultante. L'e�et de la force
résultante est le mêmeque celui produit par la somme des forces
concourantes.
Prenons par exemple le cas d'un objet ponctuel placé au point O
et subissant deux forcesreprésentées par les vecteurs . On suppose
que l'objet est libre de se déplacer sous l'e�et des
-
PHQ111 Mécanique
forces. La �gure suivante montre comment on peut additionner des
forces concourantes a�nd'en déterminer la résultante.
OA
B
Figure 1: Forces concourantes
Les forces−→A et
−→B agissent sur le point O. Comme les deux forces sont
concourantes, on
peut utiliser la méthode du polygone, qui consiste à déplacer le
second vecteur à l'extrémitédu premier vecteur tout en conservant
sa direction relative par rapport à ce dernier. Ontrace ensuite un
vecteur du point O jusqu'à l'extrémité de
−→B . Ce nouveau vecteur
−→R est la
résultante.
OA
B
R
Figure 2: Vecteur résultant de l'addition de deux forces
concourantes.
On note ici que la longueur des �èches représente la grandeur de
chacune des forces . Dansle cas d'un système à trois forces, on
procède comme sur la �gure suivante :
OA
A
B
B
C
C
R
Figure 3: Vecteur résultant de l'addition de trois forces
concourantes.
Si la résultante des forces est non-nulle, alors l'objet situé
en O va se déplacer et subir
6.2
-
PHQ111 Mécanique
une accélération −→a telle que−→R = m−→a (loi de Newton). Pour
qu'un objet soit en équilibre
et immobile (accélération nulle), il faut par conséquent
respecter une des deux conditionssuivantes :
a) ou bien la résultante−→R est nulle.
b) ou alors on applique une force additionnelle (appelée
équilibrante) qui vacompenser exactement l'e�et de la
résultante.
1.2 Moments de force
Dans le cas où les forces appliquées sur un corps ne sont pas
concourantes, il se peut quel'accélération du corps soit nulle mais
qu'il tourne autour d'un axe (voir �gure suivante).
1F
2F
a b
Figure 4: Forces non concourantes.
Les forces−→F1 et
−→F2 sont appliquées à des points di�érents du disque. Comme
elles sont d'égale
grandeur, il n'y aura pas d'accélération nette du disque (i.e.
que le disque ne subira pas detranslation). Par contre, il se
mettra à tourner dans le sens horaire de plus en plus vite :on
parle alors d'accélération angulaire. Pour décrire cette situation,
on dé�nit la quantitéappelée moment de force. Un corps subissant un
moment de force non nul se mettra àtourner. Le moment de force est
une quantité qui joue, en rotation, un rôle analogue à laforce en
translation.
Le moment de force −→τ sur une particule par rapport à l'origine
O est dé�ni comme le produitvectoriel de la force
−→F appliquée au point P, avec le vecteur −→r joignant le point
O et le
point P.−→τ = −→r ×
−→F (1)
Il s'agit d'une quantité vectorielle dont la grandeur vaut τ = r
F sin θ et dont la directionest perpendiculaire au plan formé par
−→r et
−→F .
6.3
-
PHQ111 Mécanique
O
x
y
z
P
τ
rF
θ
Figure 5: Moment de force.
Reprenons l'exemple précédent :
1F
2F
a O b1r
2r
Figure 6: Moments de force sur un disque.
Le moment de force au point O produit par−→F1 vaut :
−→τ 1 = −→r 1×−→F 1. Il s'agit d'un vecteur
dont la direction pointe vers le plan de la feuille et de
grandeur r1F1. Le moment au pointO produit par
−→F2 vaut :
−→τ 2 = −→r 2 ×−→F 2. Ici également, ce vecteur pointe vers le
plan de
la feuille et possède une grandeur égale à r2F2. Dans le cas où
la somme des forces est bienégale à zéro (donc pas de déplacement
latéral), mais la somme des moments au point O estnon nulle. Ceci
fait en sorte que l'accélération angulaire autour du point O sera
non nulle.
Pour qu'un corps soit en équilibre en présence de forces non
concourantes, il faut donc quela résultante des forces appliquées
soit nulle mais aussi que la somme des moments de forceen un point
quelconque du corps soit nulle.
Note : Pour plus de détails, vous référer aux exemples donnés
dans les référencesbibliographiques.
6.4
-
PHQ111 Mécanique
1.3 Moment d'inertie
Nous savons qu'en dynamique de rotation, c'est le moment de
force qui joue le même rôle quela force en translation. Chacun a
déjà expérimenté qu'une faible poussée peut faire ouvrirune porte,
à condition que celle-ci soit appliquée perpendiculairement à la
porte et le plusloin possible de ses gonds.
C'est l'équation suivante qui régit la dynamique d'une particule
:
−→τ = d−→l
dt(2)
où −→τ est le moment de force et−→l le moment cinétique de
rotation. On rappelle que le
moment cinétique de rotation est dé�ni par :
−→l = −→r ×−→p (3)
où −→r est le vecteur joignant l'origine au point A, où l'on
calcule le moment, et −→p la quantitéde mouvement de ce point. Dans
le cas d'un système formé de n particules, on montre que :
−→τ ext =d−→L
dtoù L =
n∑i=1
−→li (4)
où −→τ ext est la somme des moments extérieurs et−→L le moment
cinétique total. Un des
systèmes de particules les plus importants est sans doute le
solide. Soit un solide tournantà une vitesse ω autour d'un axe �xe.
Chaque particule possède une énergie cinétique. Lavitesse
tangentielle d'une particule est donnée par v = ωr. Son énergie
cinétique vaut :
K =1
2mv2 =
1
2mr2ω2 (5)
On introduit ici la notion de moment d'inertie :
I =∑
mir2i (6)
ce qui nous permet de réécrire l'équation précédente sous la
forme :
K =1
2Iω2 (7)
Bien que la masse d'un corps ne soit pas fonction de sa
position, son inertie de rotationdépend de l'axe autour duquel il
tourne. On peut aussi montrer que pour un solide, l'équationqui
régit sa dynamique de rotation est donnée par :
τ = Iα où α =dω
dt(8)
ce qui relie directement le moment de force à l'accélération
angulaire α (analogie avec F =ma en translation). On rappelle
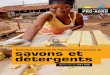
quelques valeurs de moments d'inertie de solides simples :
6.5
-
PHQ111 Mécanique
Figure 7: Quelques moments d'inertie.
(images tirées de MÉCANIQUE, Resnick-Halliday, éd. Du Renouveau
pédagogique, Mtl1979)
1.3.1 Problème d'un cylindre plein roulant sur un plan
incliné
Un cylindre plein, de masse m et de rayon R, roule sur un plan
incliné d'un angle θ. Onveut déterminer l'accélération du cylindre.
Il y a plusieurs façons de résoudre ce problème.La plus simple est
probablement d'utiliser la loi de conservation de l'énergie.
θ
Rx=0
haxe des x
� L'énergie potentielle est donnée par : mgh = mgL sin θ ici g
est l'accélérationgravitationnelle et vaut 9.8m/s2.
� L'énergie cinétique de translation vaut : 12mv2.
� L'énergie cinétique de rotation vaut : 12Iω2 où I est le
moment d'inertie du cylindre
plein, et vaut 12mR2, et ω est la vitesse angulaire donnée par
vR .
6.6
-
PHQ111 Mécanique
Pour assurer la conservation de l'énergie, il faut que l'énergie
potentiel en tout point, soitégale à la somme des énergies
cinétiques de translation et de rotation. On a donc que :
1
2mv2 +
1
2Iω2 = mg x sin θ (9)
1
2mv2 +
1
2
(1
2mR2
)v2
R2= mg x sin θ (10)
1
2mv2 +
1
4mv2 = mg x sin θ (11)
3
4mv2 = mg x sin θ (12)
3
4m
(dx
dt
)2= mg x sin θ (13)
6
4mdx
dt
d2x
dt2=dx
dtmg sin θ (14)
On trouve donc que :
a =dx2
dt2=
2
3g sin θ (15)
L'accélération est constante et ne dépend pas de la masse du
cylindre ni de son rayon !Le cylindre creux, lui, possède une
dépendance à ses rayons (nous ne démontrons pas celaici).
2 Partie expérimentale
2.1 Équilibre des forces
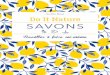
Vous allez maintenant utiliser une table de force (voir �gure
suivante) a�n de pouvoir véri�erles notions vues sur les forces
concourantes et non concourantes.
Figure 8: Table de forces et moments de force.
6.7
-
PHQ111 Mécanique
La table est composée d'un plateau métallique muni d'une tige en
son centre. Un anneaumétallique est déposé autour de la tige
centrale et est libre de glisser. On peut appliquerplusieurs forces
sur l'anneau en y �xant des �ls reliés à des masses suspendues à
l'aide depoulies. La table de force est graduée de 0 à 360o,
permettant ainsi d'identi�er la directionde chacune des forces
appliquées.
Note : Prendre soin de mettre la table à l'horizontale à l'aide
du niveau à bulle.
Le moniteur vous fournira un tableau contenant une série de deux
masses et une autrede trois masses dont vous devrez trouver la
résultante ainsi que l'équilibrante à l'aide descomposantes x et y
des forces (Utiliser une feuille supplémentaire pour e�ectuer vos
calculs etannexez-la à votre rapport.). Obtenir expérimentalement
la valeur de l'équilibrante, calculerl'erreur à l'aide de la
méthode du polygone et comparer avec la prédiction théorique.
M1 θ1 M2 θ2 Mé θé Mé (théo.) θé(théo.)250 g 0o 250 g
120o
Calcul de l'équilibrante à l'aide des composantes x et y :
6.8
-
PHQ111 Mécanique
Méthode du polygone :
M1 θ1 M2 θ2 M3 θ3 Mé θé Mé (théo.) θé(théo.)250 g 0o 250 g
120o 350 g 240o
Calcul de l'équilibrante à l'aide des composantes x et y :
6.9
-
PHQ111 Mécanique
Méthode du polygone :
Discussion :
2.2 Moments de force et forces non-concourantes
Vous allez maintenant transformer la table de force en table de
moments de force en ajou-tant un plateau métallique par-dessus
celui reposant sur la table. On insèrera trois billesmétalliques
entre les deux plateaux de telle sorte que le plateau supérieur
puisse se déplacerlibrement.
Le dessus de la table de moments ressemble à ceci :
6.10
-
PHQ111 Mécanique
Figure 9: Application des forces sur les pivots.
Pour que le disque soit en équilibre, il ne doit pas toucher à
la tige cylindrique qui traverse soncentre. Les forces seront
maintenant appliquées sur des tiges (pivots) pouvant être
inséréesdans chacun des petits trous. À chacune des tiges est
attachée une corde passant sur unepoulie. Une masse suspendue à
cette corde appliquera la force.
poulie1F 2F
3F
Figure 10: Disque supérieur de la table des moments de
force.
A�n de pouvoir prendre en note les directions relatives de
chacune des forces appliquées,placer une feuille de papier perforée
en son centre sur la plaque métallique avant d'enfoncerles tiges où
seront appliquées les forces. Vous n'aurez qu'à tracer une ligne le
long des cordesallant des anneaux aux poulies.
1) Trouver les conditions nécessaires pour maintenir en
équilibre un système detrois masses (choisissez des masses d'au
moins 200 g) reliées à des pivots devotre choix. Identi�er et
annexer la feuille utilisée à votre rapport.
6.11
-
PHQ111 Mécanique
Schéma des forces et directions :
2) Utiliser la méthode du polygone pour véri�er l'équilibre des
forces. Reproduiregraphiquement le calcul dans l'espace
ci-dessous.
Calculs :
Comme le disque ne tourne pas, cela nous dit que la somme des
moments de force qui leferait tourner dans le sens horaire est
égale à la somme des moments qui le ferait tournedans le sens
antihoraire.
6.12
-
PHQ111 Mécanique
3) Obtenir la valeur de chacun des moments de force par rapport
à un pointquelconque (sauf le centre) du disque métallique et
calculer leur somme. Vousdevez véri�er que la somme des moments
horaires est égale à la somme desmoments antihoraires. Recommencer
la même opération, mais en calculant lesmoments de force par
rapport à un autre point du disque (di�érent du centre).
6.13
-
PHQ111 Mécanique
Calculs des moments à partir du premier point choisi :
6.14
-
PHQ111 Mécanique
Calculs des moments à partir du deuxième point choisi :
6.15
-
PHQ111 Mécanique
Discuter de la précision des résultats :
Question : Dans l'expérience précédente, si on déplace le point
d'application d'une desforces selon la direction de cette même
force, est-ce que la résultante seraittoujours nulle ?
Qu'arriverait-il à la somme des moments ? Quel mouvementaurait le
disque s'il était libre de se mouvoir ?
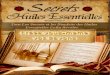
2.3 Système complexe
Vous avez à votre disposition le montage suivant :
15
119
500 g
200 g
A
BC
D
poulie
rapporteur d’angle
dynamomètre
dynamomètre
Figure 11: Équilibre des forces non concourantes.
Reproduire ici le schéma des forces présentes dans le montage
avec les masses choisies parle moniteur. Prendre soin de relever la
distance entre chacun des rapporteurs d'angle �xéssur la tige.
6.16
-
PHQ111 Mécanique
Schéma des forces et des directions :
Sur des feuilles que vous annexerez à votre rapport, déterminer
lamasse et la position du centre de gravité de la tige. Pour ce
faire, expliquer clairementla façon de procéder et faites des
diagrammes indiquant votre façon de calculer ces deuxquantités.
Comme la tige n'a pas de mouvement de translation, la somme des
forces est nulleet cela doit vous permettre de trouver le poids de
la tige. Comme la tige ne tourne pas, lasomme des moments est nulle
et cela doit vous permettre de trouver le centre de masse dela
tige. En e�et, on peut considérer que le poids de la tige s'exerce
à son centre de masse.
Discuter vos résultats :
2.4 Rotation sur un plan incliné
Vous avez à votre disposition un plan incliné, un chronomètre et
des cylindres variés.
6.17
-
PHQ111 Mécanique
2.4.1 Cylindre plein
Utiliser le cylindre d'aluminium plein de 7.3 cm de diamètre.
Mesurer précisément le tempsde descente et comparer avec la
prédiction théorique. Nous avons vu que l'accélération ducylindre
plein est donnée par :
a =2
3g sin θ (16)
On sait que la distance parcourue par un objet soumis à une
accélération constante, sansvitesse initiale, est donnée par :
d =1
2a t2 (17)
Note : Vous devez mesurer l'inclinaison du plan pour obtenir θ.
Mesurer également ladistance parcourue par le cylindre.
Angle du plan incliné : Longueur parcourue par le cylindre :
Temps dedescente mesuré :
Calcul de la prédiction théorique :
Discuter vos résultats :
6.18
-
PHQ111 Mécanique
2.4.2 Cylindre creux
Faire rouler, côte à côte, le cylindre plein d'aluminium de 7.3
cm de diamètre avec le cylindrecreux (même diamètre externe) de
laiton. Noter que les deux cylindres ont exactement lamême masse.
Noter vos observations ? Expliquer votre résultat avec ce que vous
connaissezdes moments d'inertie.
Discuter vos résultats :
2.4.3 Cylindres pleins
Faire rouler côte à côte les deux cylindres d'aluminium
(diamètre de 7.3 et 3.8 cm). Décrirevos observations et comparer
avec la prédiction théorique.
Conclusion
6.19
-
PHQ111 Mécanique
Références
[1] Resnick R. et Halliday D. Mécanique. Ed. du renouveau
pédagogique, 1979. P. 546.
[2] Knight W. D. & Ruderman M. A. Kittel C. Mécanique
(Berkeley vol. 1). LibraireArmand Colin, 1972. p. 301.
6.20