Embed Size (px)
Citation preview

Commande Robuste Problèmes Inverses
Problèmes inverses et commande robuste
de quelques
équations aux dérivées partielles.
Lucie Baudouin
20 juin 2014 - Toulouse
Soutenance d’HDR
1/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses
Plan de l’exposé
Commande Robuste de systèmes de dimension infinie
Cadre théorique
Application à un miroir déformable en Optique Adaptative
Un exemple d’interaction fluide/structure
Problème inverse de détermination de coefficient
Problématique Générale
Méthodologie de démonstration de la stabilité
Spécificités : edp hyperboliques, paraboliques, dispersives
Convergence et Reconstruction
2/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Plan de l’exposé
Commande Robuste de systèmes de dimension infinie
Cadre théorique
Application à un miroir déformable en Optique Adaptative
Un exemple d’interaction fluide/structure
Problème inverse de détermination de coefficient
Problématique Générale
Méthodologie de démonstration de la stabilité
Spécificités : edp hyperboliques, paraboliques, dispersives
Convergence et Reconstruction
3/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Formalisme d’état
P
K
W Z
U Y
∂tX(t) = AX(t) +B1W (t) +B2U(t),
X(0) = 0,
Z(t) = C1X(t) +D12U(t)
Y (t) = C2X(t) +D21W (t).
(P)
I W = perturbation,
I Z = sortie à contrôler,
I Y = mesure,
I U = contrôle,
I X = état du système,
I A générateur infinitésimal
d’un C0-semigroupe sur
X (Hilbert),
I B1, B2, C1, C2, D12, D21
operateurs linéaires bor-
nés.
4/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Contrôle robuste en dimension infinieL’équation d’état est une edp
∂tX(t) = AX(t) +B1W (t) +B2U(t), t ≥ 0,
X(0) = 0
que l’on contrôle en boucle fermée à l’aide de l’observation partielle
Y (t) = C2X(t) +D21W (t), t ≥ 0
et suivant le coût J0(U,W ) =∫ ∞
0
(|C1X(t)|2 + |D12U(t)|2
)dt.
Objectif : construire un contrôleur K assurant que l’influence de
W sur Z reste petite, i.e. J0(U,W ) ≤ γ2
∫ ∞0
|W (t)|2dt.
Autrement dit : construire contrôleur par retour de mesure K qui
stabilise le système en garantissant ‖W 7→ Z‖H∞ < γ.
5/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Théorème Van Keulen, Peters, Curtain ’93,
Bensoussan Bernhard ’93,
Barbu ’95.
Soit γ > 0. Supposons que (A,B1) est stabilisable et (A,C1) est
détectable. Alors :
∃ K contrôleur stabilisant tel que ‖W 7→ Z‖H∞ < γ
⇔∃ P,Σ, opérateurs linéaires symétriques définis positifs tels que
Σ(I − γ−2PΣ)−1 ≥ 0
et vérifiant les équations de Riccati
PA+A∗P + P (B2B∗2 − γ−2B1B
∗1)P + C∗1C1 = 0,
ΣA∗ +AΣ + Σ(C∗2C2 − γ−2C∗1C1)Σ +B1B∗1 = 0.
En particulier, il existe alors un contrôleur explicite K dépendant de P, Σ
et donnant la stabilité exponentielle de l’opérateur en boucle fermée.6/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Contrôleur et reconstructeurLe contrôleur K peut alors prendre la forme suivante
Φ′(t) = (A+M)Φ(t) +NY (t), ∀t ≥ 0,
Φ(0) = 0,
U(t) = LΦ(t) +RY (t), ∀t ≥ 0,
(K)
où Φ est l’état adjoint (ou reconstructeur) et on a par exemple,
en posant Π = Σ(I − γ−2PΣ)−1,
L = −B∗2P, M = −(B2B∗2−γ−2B1B
∗1)P−ΠC∗2C2, N = ΠC∗2 , R = 0.
Cela donne le système en boucle fermée(X
Φ
)′=
(A B2L
NC2 A+M
)(X
Φ
)+
(0
ND21
)W.
exponentiellement stable.7/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
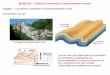
Système d’optique adaptative
(e, φtur)
I Objectif :
Corriger en temps réel la netteté desimages obtenues par des téléscopes
terrestres ;
I Contrainte :
La résolution d’un téléscope estlimitée par la turbulence
atmosphérique ;
I Solutions pré-existantes :
Approche statique et empirique ;
I Motivation :
Miroirs de plus en plus grand avecbeaucoup d’actionneurs.
- Robust control of a bimorph mirror for adaptive optics system,LB, C. Prieur, F. Guignard & D. Arzelier, Applied Optics 2008.
8/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Outils de mesure
I Analyseur de surface d’onde :
un analyseur de Shack-Hartmann mesure la déformation du
front d’onde a posteriori : ySH = φtur − 4πλ e+ cwSH ;
I Capteurs du miroir déformable : ype = e31∆e+ dwpe.
Permettent la modélisation de Y = (ype, ySH).9/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Modélisation du système d’OA
I Modèle edp du miroir déformable (Prieur Lenczner ’07) :
ρ∂tte+Q1∆2e+Q2e = d31∆u+ bρwmod ;
I Modèle dynamique de la turbulence atmosphérique (théorie de
Kolmogorov) : ∂tφtur = Fφtur + Gwtur ;
I Variables du modèle d’état complet :
I X = (e, ∂te, φtur) ; W = (wmod, wSH , wtur, wpe) ; Z = (φres, u) ;
φres = φtur −4πλe
I le contrôle U = u correspond au voltage appliqué aux
actionneurs piezo-électriques ;I le vecteur des mesures en sortie Y = (ype, ySH).
Le modèle entre dans le cadre théorique attendu.10/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Application numérique
I (e, ∂te) : projection du modèle de dimension infinie sur une base
hilbertienne appropriée (fonctions de Bessel) ;
I φtur : base "optique" des modes de Zernique (les 14 premiers
contiennent 92% d’information) ;
I Données expérimentales du projet SESAME de l’Observatoire
de Paris ;
I Indice de performance : le ratio ‖φtur‖L2/‖φres‖L2 .
Simulations de Monte-Carlo montrant une atténuation
de la distorsion de phase du front d’onde réfléchi de 48%,
comparable à celle de Paschall ’93 (approche statique).
11/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Un exemple d’interaction fluide/structureDispositif expérimental à l’ISAE reproduisant le comportement
dynamique d’ailes d’avion contenant des reservoirs de carburant.
12/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Modèles edp Blevins ’79, Geradin Rixen ’96
Le déplacement transversal w de la plaque vérifie
ms∂ttw(y, z, t) + ζ∂tw(y, z, t) +D∆2(y,z)w(y, z, t) = F (y, z, t),
∀(y, z, t) ∈ [0, L]× [0, `]× (0, T ) ;
Stoker ’95, Dodge ’00
Le potentiel de vitesse φ du liquide dans le réservoir vérifie
∆(x,y,z)φ(x, y, z, t) = 0 et ∂tφ(x, y, z, t)+p(x, y, z, t)
ρ+gz−α(t)x = 0,
∀(x, y, z, t) ∈ Ω× (0, T ) ;
Termes de couplage entre réservoir et plaque : F et α.
Echec de l’écriture d’un modèle d’état complet de dim. infinie.
13/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Modèle mécanique équivalent - Thèse B. Robu
I Ballottement du liquide décrit à l’aide de pendules (poids,
longueurs et point d’attache à ajuster) ;
I Projection du modèle de plaque sur une base de modes propres
associés à ∆2 ;
I Couplages écrits après le passage à la dimension finie ;
I Ajustement du modèle théorique, par essai-erreur à la lecture
du diagramme de Bode :
101 102−35
−30
−25
−20
−15
−10
−5Ma
gnitud
e (dB)
Bode Diagram
Frequency (rad/sec)
simulationstests
14/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Commande robuste du systèmeObjectifs :
I Etudier numériquement la commande robuste :
I par placement de pôle (retour d’état avec observateur de
Luenberger)I par contrôleur H∞, d’ordre plein ou réduit, ou avec objectifs
simultanés (HIFOO)
I Implémenter les contrôleurs calculés sur le banc d’essai ;
I Identifier et gérer les problèmes de spillover.
- Active vibration control of a fluid/plate system using a pole placement controller,B. Robu, LB & C. Prieur, International Journal of Control 2012.- Simultaneous H∞ vibration control of fluid/plate system via reduced-order controller,B. Robu, LB, C. Prieur & D. Arzelier, IEEE TCST 2012.- Contrôle actif des vibrations dans un système couplé fluide/structure,B. Robu, LB & C. Prieur, JESA 2012.
15/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Cadre théorique OA Fluide/Structure
Perspectives
I Explorer les questions de convergence des commandes
calculées sur les modèles tronqués... cf K. Morris ;
I Etudier les approches limitant les problèmes de spillover ;
I Travailler sur un modèle permettant l’analyse “dimension infinie”
complète et l’implémentation sur banc d’essai.
Université de Bristol : modèle de cable incliné.
16/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Plan de l’exposé
Commande Robuste de systèmes de dimension infinie
Cadre théorique
Application à un miroir déformable en Optique Adaptative
Un exemple d’interaction fluide/structure
Problème inverse de détermination de coefficient
Problématique Générale
Méthodologie de démonstration de la stabilité
Spécificités : edp hyperboliques, paraboliques, dispersives
Convergence et Reconstruction
17/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Un problème inverse pour les ondes
Considérons l’équation des ondes dans Ω, borné régulier :∂tty −∆xy + p(x)y = f, (t, x) ∈ (0, T )× Ω,
y(t, x) = g(t, x), (t, x) ∈ (0, T )× ∂Ω
(y(0, x), ∂ty(0, x)) = (y0(x), y1(x)), x ∈ Ω.
• Données : termes sources f, g ; données initiales (y0, y1).
• Inconnue : le potentiel p = p(x).
• Information supplémentaire : ∂νy(t, x) on (0, T )× Γ0.
Objectif : Trouver le potentiel p.
Questions d’identifiabilité avant toute identification.
18/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Est il possible de retrouver le potentiel p = p(x) dans Ω
à partir de mesures du flux ∂νy(t, x) sur (0, T )× Γ0 ?
• Questions liées
I Unicité : Etant donnés deux potentiels p 6= q,
peut on assurer que ∂νy[p] 6= ∂νy[q] ?
I Stabilité : Etant donnés deux potentiels p, q,
si ∂νy[p] ' ∂νy[q], peut on garantir p ' q ?
I Reconstruction : Etant donné ∂νy[p], peut-on calculer p?
• Résultats connus : unicité (Klibanov ’92), stabilité (Yamamoto ’99,
Imanuvilov Yamamoto ’01), par inégalités de Carleman.
• Problème ouvert : la reconstruction - i.e. comment calculer
effectivement le potentiel à partir de mesures localisées ?19/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Outil principal : inégalité de CarlemanOndes. Imanuvilov ’02, LB & Puel, Zhang, Klibanov...Soient λ > 0, β ∈ (0, 1) et les poids ψ et ϕ définis par
ψ(x, t) = |x− x0|2 − βt2 + α, ϕ(x, t) = eλψ(x,t)
où α > 0 est tel que ψ ≥ 1 sur Ω× [0, T ].
Sous des hypothèses sur x0 et Γ0,
∃s0 > 0, λ > 0 et M = M(s0, λ, T, β, x0) > 0 tel que :
s
∫ T
−T
∫Ω
e2sϕ(|∂tw|2 + |∇w|2) dxdt+ s3
∫ T
−T
∫Ω
e2sϕ|w|2 dxdt
≤M∫ T
−T
∫Ω
e2sϕ|∂ttw −∆xw|2 dxdt+Ms
∫ T
−T
∫Γ0
e2sϕ |∂νw|2 dσdt
∀s > s0 et w ∈ L2(−T, T ;H10 (Ω)), ∂ttw −∆xw ∈ L2(−T, T ;L2(Ω)),
w(·,±T ) = ∂tw(·,±T ) = 0 dans Ω.20/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Méthode de démonstration de la stabilité‖p− q‖L2(Ω) ≤ C ‖∂νy[p]− ∂νy[q]‖H1((0,T );L2(Γ0)) (?)
I Outils principaux :
I Inégalité de Carleman globale avec fonction poids ad-hoc ;I Estimations d’énergie classiques ;
I Etapes pour démontrer la stabilité Lipschitzienne (?) :
I Poser z = y[p]− y[q] : on se place localement autour d’une
solution connue y[p] ;I Ecrire l’équation de Z = ∂tz et l’étendre à des temps
négatifs (si possible) ;I Appliquer l’inégalité de Carleman à w = η(t)Z, où η est une
fonction cut-off, nulle près de t = ±T (si besoin) ;I Conclure avec des estimations d’énergie.
21/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Illustration dans le cas des ondes
Soient x0 ∈ RN \ Ω, Γ0 et T tels que
x ∈ ∂Ω, (x− x0) · ν(x) > 0 ⊂ Γ0 ; T > supx∈Ω|x− x0|.
Supposons aussi que ‖p‖L∞(Ω) ≤ m, infx∈Ω|y0(x)| ≥ γ > 0 et
y[p] ∈ H1(0, T ;L∞(Ω)) dans8><>:∂tty −∆xy + p(x)y = f, in (0, T )× Ω,
y(t, x) = g(t, x), on (0, T )× ∂Ω
(y(0, x), ∂ty(0, x)) = (y0(x), y1(x)), in Ω.
Les étapes décrites plus haut donnent8><>:∂ttw −∆xw + q(x)w = η(q − p)∂ty[p] + η′∂tZ + η′′Z, in (−T, T )× Ω,
w(t, x) = 0, on (−T, T )× ∂Ω,
(w(0, x), ∂tw(0, x)) = (0, (q − p)y0) in Ω.
22/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Spécificités des cas d’edp hyperboliques
I Cas des ondes classiques :
I Condition sur le temps d’observation T assez grand ;I Condition sur le domaine d’observation Γ0 ⊂ ∂Ω ;I Réversibilité permettant de se placer sur (−T, T ) ;I Inégalité de Carleman globale : d’autres méthodes existent.
Travaux de Puel, Yamamoto, Imanuvilov, Zhang,...
I Cas plus exotiques étudiés :
I Opérateur discontinu ∂tt − div(a(x)∇·),
a(x) =
a1 > 0 dans Ω1,
a2 > 0 dans Ω2.et a1 > a2
Observation sur ∂Ω ; somme de 2 inégalités de Carleman.
- A global Carleman estimate in a transmission wave equation...,LB, A. Mercado & A. Osses, Inverse Problems 2007.
23/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
I I Opérateur sur un réseau : ∂tt − ∂xx, pour x ∈ R Choix crucial du poids de Carleman,
inspiré de Benabdallah, Dermenjian, Le Rousseau ’07.
I Opérateur semi-discret : ∂tt −∆h (différences finies)Γ00 1x0
Résultat de stabilité uniforme
‖ph − qh‖L2(Ω) ≤ C∥∥∂t(∂−h yh[ph])N+1 − ∂t(∂−h yh[qh])N+1
∥∥L2(0,T )
+ C∥∥h∂+
h ∂tt(yh[ph]− yh[qh])∥∥L2((0,T );L2([0,1)))
.
Autre Carleman discret par Boyer, Hubert, Le Rousseau ’10.- Global Carleman estimate on a network for the wave equation and application to an inverse problem,LB, E. Crépeau & J. Valein, MCRF 2011- Convergence of an inverse problem for discrete wave equations,LB & S. Ervedoza, SICON 2013.
24/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Spécificités du cas des edp paraboliques
I Observation localisée en espace suffisante ;
I Observation supplémentaire en temps T0 ∈ [0, T ] ;
I Voir Fursikov Imanuvilov ’96, Imanuvilov Yamamoto ’98,
Le Rousseau, Dermenjian, Benabdallah, Gaitan ’06 ’07,...
cf survey Yamamoto ’09 ;
I Equation de Kuramoto Sivashinski :
∂ty + ∂2x(σ(x)∂2
xy) + γ(x)∂2xy + y∂xy = g,
pour (x, t) ∈ (0, 1)× (0, T ) ;
Poids de Carleman ϕ(x, t) =ψ(x)
t(T − t).
- Lipschitz stability in an inverse problem for the Kuramoto-Sivashinsky equation,LB, E. Cerpa, E. Crépeau & A. Mercado, Applicable Analysis 2013.
25/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Spécificités du cas des edp dispersivesI Equation de Schrödinger : i∂ty + div(a(x)∇y) + p(x)y = 0
I Pas de temps minimal d’observation ;I Donnée initiale y0 ∈ R ou y0 ∈ iR uniquement ;
I Poids de Carleman ϕ(x, t) =α− eλ|x−x0|2
(T − t)(T + t);
I voir LB & Puel ’02, Mercado Osses Rosier ’08,
Cardoulis Cristofol Gaitan ’08, Yuan Yamamoto ’09...
I Equation de Korteweg-de-Vries : ∂ty+ a(x)∂3xy+ ∂xy+ y∂xy = 0
I hypothèse de symétrie sur y0 et a, du type a(x) = a(L− x) ;
I Poids de Carleman ϕ(x, t) =α− eλψ(x)
(T − t)(T + t).
- An inverse problem for Schrödinger equations with discontinuous main coefficient,LB & A. Mercado, Applicable Analysis 2008.- On the determination of the principal coefficient from boundary measurements in a KdV equation,LB, E. Cerpa, E. Crépeau & A. Mercado, JIIP 2014.
26/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Vers la reconstruction
Etant donnée une observation continue M [p] = ∂νy[p]|(0,T )×∂Ω
I Discretisons l’équation des ondes∂ttyh −∆hyh + phyh = fh ' f,yh|(0,T )×∂Ω = gh ' g,(yh, ∂tyh)(t = 0) = (y0
h, y1h) ' (y0, y1).
I Problème inverse discret : trouver le potentiel ph tel que la
solution discrète correspondante yh[ph] approche au mieux
l’observation :
∂hyh[ph]|(0,T )×∂Ω (t, x) 'M [p](t, x).
Question : Obtenons-nous ph ' p?
27/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Premier objectifAnalyser la convergence du problème inverse discret.
I Question naturelle pour tout problème inverse en dimension
infinie : retrouver un terme source, une conductivité...
I Dépend a priori du schéma numérique employé ;
I Principale difficulté : dynamique de l’équation des ondes
continue 6= dynamique de l’équation des ondes discrétisée,
cf Ervedoza - Zuazua ’11.
Ondes parasites hautes-fréquence, générées par les schémas numériques.
Dynamique continue 6= dynamique discrète28/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Second objectifProposer un nouvel algorithme de reconstruction globalement
convergent.
Remarques :
I Reconstruction du potentiel, avec une seule observation locale ;
I A partir de l’observation M [p] = ∂νy[p], une méthode classique
pour résoudre ce problème inverse consiste à minimiser
J(q) = ‖∂t (∂νy[q]−M [p]) ‖2L2(Γ0×(0,T ))
qui est non convexe ⇒ problème de minima locaux ;
I Notre algorithme est basé sur une inégalité de Carleman et sur
la structure de démonstration du résultat de stabilité.
29/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Résultat de convergenceobtenu avec un argument de type théorème de Lax, en deux étapes :
I Consistance : Pour tout potentiel q, on peut trouver une suite de
potentiels discrets qh tels que qh −→h→0
q dans L2(Ω) et
∂t(∂−h yh[qh])N+1 −→h→0
∂txy[q](t, 1) dans L2(0, T ).
I Stabilité uniforme : Il existe une constante C indépendante de
h > 0 telle que pour tout ph, qh,
‖ph − qh‖L2(Ω) ≤ C∥∥∂t(∂−h yh[ph])N+1 − ∂t(∂−h yh[qh])N+1
∥∥L2(0,T )
+C∥∥h∂+
h ∂tt(yh[ph]− yh[qh])∥∥L2((0,T );L2([0,1)))
.
- Convergence of an inverse problem for discrete wave equations,LB & S. Ervedoza, SICON 2013.- Stability of an inverse problem for the discrete wave equation and convergence results,LB, S. Ervedoza & A. Osses, submitted.
30/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Vers la reconstruction du potentielRappelons que Z = ∂t (y[p]− y[q]) vérifie
∂ttZ −∆xZ + q(x)Z = (q − p)∂ty[p], (t, x) ∈ (0, T )× Ω,
Z(t, x) = 0, (t, x) ∈ (0, T )× ∂Ω
(Z(0, x), ∂tZ(0, x)) = (0, (q − p)y0), x ∈ Ω.
Idée : le terme source (q − p)∂ty[p] est “moins important” que la
donnée initiale (q − p)y0, et nous connaissons par ailleurs
∂νZ = ∂t∂νy[p]− ∂t∂νy[q] sur (0, T )× Γ0.
L’idée est d’ajuster Z en utilisant ces informations,
et en appliquant l’inégalité de Carleman appropriée.
- Global Carleman estimates for waves and applications,LB, M. de Buhan & S. Ervedoza, Comm. PDE 2013.
31/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
AlgorithmeInitialisation : q0 = 0.
Itération : Etant donné qk,
1 - Calculer la solution w[qk] deLqkw = ∂2
tw −∆w + qkw = f, dans Ω× (0, T ),
w = g, sur ∂Ω× (0, T ),
w(0) = w0, ∂tw(0) = w1, dans Ω,
et poser µk = ∂t(∂νw[qk]− ∂νw[p]
)sur Γ0 × (0, T ).
2 - On introduit la fonctionelle
Jk0 (z) =∫ T
0
∫Ω
e2sϕ|Lqkz|2 + s
∫ T
0
∫Γ0
e2sϕ|∂νz − µk|2,
sur l’espace T k = z ∈ L2(0, T ;H10 (Ω)), z(0) = 0,
Lqkz ∈ L2(Ω× (0, T )), ∂νz ∈ L2(Γ0 × (0, T )).
32/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
AlgorithmeInitialisation : q0 = 0.
Itération : Etant donné qk,
1 - Calculer la solution w[qk] deLqkw = ∂2
tw −∆w + qkw = f, dans Ω× (0, T ),
w = g, sur ∂Ω× (0, T ),
w(0) = w0, ∂tw(0) = w1, dans Ω,
et poser µk = ∂t(∂νw[qk]− ∂νw[p]
)sur Γ0 × (0, T ).
2 - On introduit la fonctionelle
Jk0 (z) =∫ T
0
∫Ω
e2sϕ|Lqkz|2 + s
∫ T
0
∫Γ0
e2sϕ|∂νz − µk|2,
sur l’espace T k = z ∈ L2(0, T ;H10 (Ω)), z(0) = 0,
Lqkz ∈ L2(Ω× (0, T )), ∂νz ∈ L2(Γ0 × (0, T )).
32/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Théorème :
Sous les hypothèses sur Γ0 ⊂ ∂Ω et T > 0, pour tout s > 0 et k ∈ N, lafonctionelle Jk
0 est continue, strictement convexe et coercive sur T k.
3 - Soit Zk le minimiseur unique de la fonctionnelle Jk0 , et posons
qk+1 = qk +∂tZ
k(0)w0
⇔ ∂tZk(0) = (qk+1 − qk)w0
4 - Finalement, on choisit
qk+1 = Tm(qk+1), où Tm(q) =
q, si |q| ≤ m,sign(q)m, sinon.
Théorème :
Soit p ∈ L∞m (Ω). Sous les hypothèses sur Γ0, T , y0, y[p], il existe M > 0
telle que ∀s assez grand, ∀k ∈ N,ZΩe2sϕ(0)(qk − p)2 dx ≤
„M√s
«k ZΩe2sϕ(0)p2 dx.
En particulier, pour s assez grand, qk converge vers p quand k →∞ .
33/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Conclusion et perspectivesI Bonnes simulations numériques en 1D (en ∼ 20 itérations) ;
I Encore meilleures avec l’ajout d’un terme de régularisation dans Jk0,h(zh) de la
forme sZ T
0
Z 1
0e2sϕ|h∂+
h ∂tzh|2 dt.
- 2.0
- 1.5
- 1.0
- 0.5
0.0
0.5
1.0
1.5
2.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0- 2.0
- 1.5
- 1.0
- 0.5
0.0
0.5
1.0
1.5
2.0
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
I Mais les paramètres de Carleman sont “irréalistes” : s = 1 et λ = 0.1 !
I en 2D (2 itérations, ∼ 1 journée de calcul !) :IsoValue0.70.7842110.8684210.9526321.036841.121051.205261.289471.373681.457891.542111.626321.710531.794741.878951.963162.047372.131582.215792.3
IsoValue0.70.7842110.8684210.9526321.036841.121051.205261.289471.373681.457891.542111.626321.710531.794741.878951.963162.047372.131582.215792.3
IsoValue0.70.7842110.8684210.9526321.036841.121051.205261.289471.373681.457891.542111.626321.710531.794741.878951.963162.047372.131582.215792.3
I Travaux en cours avec une fonction poids à un seul paramètre...
34/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Merci pour votre attention.
35/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp

Commande Robuste Problèmes Inverses Problématique Méthodologie Spécificités Reconstruction
Merci pour votre attention.
35/35 Lucie Baudouin Problèmes inverses et commande robuste d’edp