Embed Size (px)
Citation preview

B 2
77
0
5 -
1989
Équilibrage des machines alternatives
par Bernard SWOBODAIngénieur des Arts et Métiers (ENSAM) et de l’École Nationale Supérieuredu Pétrole et des Moteurs (ENSPM)Chef du secteur Alimentation – Performances – Antipollution du DépartementMoteur à la Direction des Études Automobiles PeugeotProfesseur à l’École Nationale Supérieure du Pétrole et des Moteurs (ENSPM)
ors de l’étude d’un moteur, la cinématique et la dynamique précèdent l’équi-librage des forces d’inertie. La cinématique permet de connaître la position,
la vitesse et l’accélération de tous les points du moteur et leurs variations surun tour moteur en fonction du régime. La dynamique permet de connaître lesefforts et les couples en tous les points, et leurs variations sur un cycle moteuren fonction du régime et de la charge.
Les deux théorèmes de la dynamique s’écrivent de la manière suivante :— théorème de la résultante dynamique :
L’accélération du centre de gravité G d’un solide S en mouvement par rapportà un repère fixe O multipliée par la masse du solide est égale à la somme desforces extérieures appliquées au solide ;
— théorème du moment dynamique :
1. Étude préliminaire ................................................................................... B 2 770 - 31.1 Définitions .................................................................................................... — 31.2 Étude par catégories de forces ................................................................... — 31.3 Nature des forces et des couples engendrés par les forces d’inertie ..... — 4
2. Équilibrage des masses rotatives........................................................ — 62.1 Étude théorique ........................................................................................... — 62.2 Moteur monocylindre.................................................................................. — 72.3 Moteurs multicylindres en ligne................................................................. — 82.4 Moteurs multicylindres en V....................................................................... — 162.5 Autres types de moteur............................................................................... — 17
3. Équilibrage des masses alternatives .................................................. — 183.1 Étude théorique ........................................................................................... — 183.2 Moteur monocylindre.................................................................................. — 193.3 Moteurs multicylindres en ligne................................................................. — 203.4 Moteurs multicylindres en V....................................................................... — 263.5 Autres types de moteur............................................................................... — 33
4. Tableaux récapitulatifs des valeurs des efforts et des couples . — 33
5. Conclusion ................................................................................................. — 38
Références bibliographiques ......................................................................... — 38
L
ms Γ G, S/O( ) Fext / S∑=
δ S G⁄( ) �Fext/ G∑=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 1

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Le moment dynamique d’un solide S par rapport à son centre de gravité Gest égal à la somme des moments de forces extérieures appliquées au solideramenés au centre de gravité.
Après l’étude dynamique, on peut classer les efforts en deux catégories : lesefforts internes et les efforts externes.
Les efforts internes sont les efforts « qui ne sortent pas du moteur » comme,par exemple, l’effort dans une vis de culasse ou sur un palier de ligne d’arbre.Ils s’appliquent localement à des pièces internes qu’il faut dimensionner enconséquence.
Les efforts externes sont les efforts « qui sortent du moteur » comme, parexemple, le couple moteur ou le couple de basculement dû à l’effort latéral dupiston sur la chemise. Ils s’appliquent globalement du moteur vers le milieuextérieur et, s’ils ne sont pas constants, provoquent des mouvements du moteursur son support.
L’équilibrage s’intéresse aux efforts externes engendrés par les forcesd’inertie.
Afin de connaître les mouvements du moteur sur son support, ce qui est indis-pensable pour la définition de la liaison moteur-support, il suffit de lui appliquerles théorèmes de la dynamique. Pour de faibles mouvements, le moteur peutêtre fixé rigidement sur son support ; s’ils sont plus importants, il faut passerpar l’intermédiaire de cales élastiques afin de minimiser les variations d’effortset de couples transmises au support.
Le but de l’équilibrage est de limiter ces mouvements créés par les forcesd’inertie. Il y a deux raisons, géométrique et acoustique :
— premièrement, positionner correctement le moteur par rapport à sonenvironnement en évitant de trop grands débattements pour des raisonsd’encombrement (par exemple, proximité du capot ou du radiateur dans le casd’un véhicule automobile) et de complexité de liaison avec les organes annexes(par exemple, tenue en endurance de la ligne d’échappement qui impose desrotules ou des soufflets pour absorber les débattements du moteur, liaisonssouples aux circuits d’eau, d’alimentation en carburant) ;
— deuxièmement, limiter les vibrations transmises par le moteur à sonsupport pour éviter les remontées de bruit par les points de fixation et garantirune bonne tenue en endurance de la liaison moteur-support.
L’équilibrage est un critère important dans le choix de l’architecture moteur.En effet, en fonction du nombre de cylindres, de leur disposition et de la formedu vilebrequin, certaines forces d’inertie s’annulent entre elles. On dit alors quele moteur est « naturellement » équilibré sans apport de contrepoids. Dans cecas, la mise en place de contrepoids ne sert qu’à réduire les efforts internes surles paliers de ligne d’arbre. Si les forces d’inertie ne sont pas équilibrées, onles équilibre par des contrepoids dont les masses et les positions tiennent aussicompte de ces efforts internes mais il ne faut pas confondre l’équilibrage quiest l’étude du mouvement du moteur dû aux forces externes et notre souci delimiter les efforts internes.
Nous allons maintenant étudier l’équilibrage des moteurs alternatifs en ligne,en V et à plat, mais les théories énoncées sont générales et applicables àd’autres dispositions de moteur (en étoile, rotatif, etc.) et à d’autres machines(compresseurs, pompes, etc.).
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 2 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
1. Étude préliminaire
1.1 Définitions
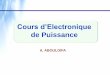
Pour étudier le mouvement bielle-manivelle, nous avons besoinde trois repères (figures 1 et 2).
■ Repère fixe 0 :
O est le centre du vilebrequin,
est l’axe du cylindre,
est l’axe du vilebrequin.
■ Repère mobile lié au vilebrequin 1 :
θ est l’angle de rotation instantané du vilebrequin (en rad),
est la vitesse angulaire instantanée du vilebrequin(en rad/s)
avec N (tr/min) régime du moteur,
A est le centre de la tête de bielle,
R est le rayon de manivelle.
■ Repère mobile lié à la bielle 2 :
ϕ est l’angle de rotation instantané de la bielle (en rad),
B est le centre du pied de bielle,
L est l’entraxe de bielle,
Gb est le centre de gravité de la bielle, sa position étant définiepar L1 .
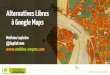
Si ce n’est pas le cas, le moteur est soumis à des mouvementsengendrés par des efforts et des couples sur les trois axes fixes.
Par définition, l’effort sur est appelé effort de tamis ou de
ballant, celui sur est appelé effort de pilon ou de
rebondissement ; il n’y a pas d’effort sur . Le couple autour de
est appelé couple de galop ou de tangage, celui autour de
est appelé couple de lacet et celui autour de est appelé couple
de basculement ou de roulis.
1.2 Étude par catégories de forces
Il y a trois catégories de forces : les forces dues aux masses,celles dues aux gaz et celles dues aux inerties des pièces enmouvement.
Les efforts dus aux masses engendrent des réactions constantessur les appuis et ne sont donc pas à prendre en considération pourl’équilibrage.
Les efforts dus aux gaz donnent naissance au couple moteur età un couple de basculement. On n’équilibre pas ces efforts souspeine de supprimer le couple moteur.
Il reste les efforts dus aux inerties qui existent au nombre detrois : inertie centrifuge, inertie alternative et inertie de la bielle.
■ L’inertie centrifuge est produite par la masse de la manivelle
mmv ; elle est constante et tourne autour du point O à la vitesse .Elle est parfaitement équilibrable (§ 2).
■ L’inertie alternative est produite par la masse du piston mpi ; elledonne naissance à :
— un couple moteur instantané qui s’additionne algébriquementau couple moteur dû aux gaz ; il engendre un couple moyen nul sil’on néglige les frottements ; on ne l’équilibre pas ;
— un couple de basculement « naturel » qui s’additionnealgébriquement au couple de basculement dû aux gaz, non équi-librable sauf dans certains cas particuliers (voir l’équilibrage desmasses alternatives du deuxième ordre par la méthode deLanchester, § 3.3.4) ;
— une force d’inertie verticale parfaitement équilibrable (§ 3).
Par définition, une machine est dite « parfaitementéquilibrée » si les réactions sur les appuis sontconstantes.
O, X0 , Y0 , Z0( )
Y0
Z0
O, X1 , Y1 , Z1( )
θ̇
θ̇πN30
----------=
B, X2 , Y2 , Z2( )
X0
Y0
Z0
X0 Y0
Z0
θ̇
Figure 1 – Définition des repères
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 3

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
■ L’inertie de la bielle se décompose en deux inerties.
Le mouvement de la bielle est complexe ; on connaît son
accélération, qui a deux composantes : l’une sur , l’autre sur .
Ce mouvement donne naissance à une force d’inertie de valeur
et à un couple d’inertie de valeur
étant l’accélération instantanée du centre de gravité de
la bielle Gb appartenant au repère 2 par rapport au repère 0 et Iz
le moment d’inertie de la bielle par rapport à Gb sur l’axe exprimé
dans le repère . Pour l’équilibrage, on décompose
fictivement la bielle en deux parties (figure 3) :— une partie en mouvement alternatif attachée au point B de
masse m B (§ 3) ;— une partie en mouvement rotatif attachée au point A de
masse mA (§ 2).
Pour faire cette décomposition, il faut respecter trois conditions :1) la masse doit être conservée : mbi = mA + mB2) la position du centre de gravité doit être conservée :
mA (L – L1) = m BL1
3) le moment d’inertie par rapport au centre de gravité doit êtreconservé :
Dans la pratique, on détermine mA , m B et L1 par calcul ou parpesées. La condition 3 donne alors le moment d’inertie fictif de labielle décomposée qui n’est pas tout à fait égal au moment d’inertieréel que l’on peut calculer ou mesurer par pendulage. Pour êtreparfaitement exact, il faut donc introduire un moment d’inertiecomplémentaire égal à la différence entre les deux. La bielledécomposée équivalente à la bielle réelle est alors définie par mA ,mB et le moment d’inertie complémentaire. Généralement, ce der-nier est suffisamment faible pour être négligé.
L’équilibrage de la bielle se résume donc à l’équilibrage de deuxmasses mA et mB , l’une en mouvement rotatif et l’autre enmouvement alternatif.
Les inerties à équilibrer sont donc de deux types.
— Une force d’inertie rotative due à la masse rotative, celle-ciétant composée de la masse de la manivelle mmv et de la massemA .
La manivelle, formée de deux flasques de vilebrequin et dumaneton, a son centre de gravité à une distance r2 de l’axe(figure 4) telle que :
mmv · r2 = 2mfl · r1 + mmt · R
avec mmv = 2m fl + mmt .
Donc, la masse rotative est concentrée à une distance r de l’axetelle que :
mrot · r = mmv · r2 + mA · R
avec mrot = m mv + mA .
Afin de simplifier les équations de galop et de lacet, il estpréférable d’exprimer la masse rotative à la distance R, appeléemasse rotative fictive (figure 4), le produit masse × distance devantrester constant :
mrot fict · R = mrot · r
Dans tout ce qui suit, lorsqu’on parlera de masse rotative, ils’agira de la masse rotative fictive placée à la distance R de l’axede rotation.
— Une force d’inertie alternative due à la masse alternative,celle-ci étant composée de la masse du piston assemblé et de lamasse mB .
1.3 Nature des forces et des couples engendrés par les forces d’inertie
■ Force d’inertie rotative
La force d’inertie rotative due à la masse rotative est un vecteurd’intensité constante tournant autour du point O à la vitesse duvilebrequin ; elle engendre donc une force verticale et une forcehorizontale d’ordre 1.
Figure 2 – Définition des efforts et des couples
sur le repère fixe
Exemple : pour un moteur d’automobile 4 cylindres en lignede 2,2 L de cylindrée, les caractéristiques sont les suivantes :
m A = 0,72 kg L1 = 107 mmmB = 0,20 kg L = 137 mm
Le moment d’inertie de la bielle fictive est : 0,002 938 kg · m2 alorsque le moment d ’ ine r t ie rée l ( va leur mesurée ) es t éga là 0,003 486 kg · m2. Le moment d’inertie complémentaire est doncégal à 0,000 55 kg · m2 soit 16 % du moment réel ; on peut le négligerpar rapport à l’ensemble des inerties que l’on va équilibrer, l’inertiecentrifuge étant prédominante.
O, X0 , Y0 , Z 0( )
X0 Y0
mbi Γ Gb , 2 0⁄( )⋅ Iz ϕ̇̇ Z0 ,
Γ Gb , 2 0⁄( )
Z2
Gb, X2 , Y2 , Z2( )
Iz mA L L1–( )2 mBL 12
+=
Figure 3 – Décomposition fictive de la bielle
Exemple : pour notre moteur 2,2 L :
m fl = 0,909 kg r1 = 21,28 mmmmt = 0,480 kg R = 40,80 mm
d’où r 2 = 25 ,36 mm, m r o t = 3 ,018 kg , r = 29 ,04 mm etmrot fict = 2,148 kg.
Exemple : pour notre moteur 2,2 L et pour une masse du pistonassemblé de 0,69 kg, on a malt = 0,89 kg.
θ̇
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 4 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Pour un moteur monocylindre, la force d’inertie rotative engendreuniquement un effort de tamis et un effort de pilon d’ordre 1.
Pour un moteur multicylindre, les forces d’inertie rotatives secomposent autour du point central O du vilebrequin et engendrentun effort de tamis et de pilon d’ordre 1 et un couple de galop et delacet d’ordre 1.
■ Force d’inertie alternative
La force d’inertie alternative due à la masse alternative est un
vecteur d’intensité variable dirigé selon l’axe vertical que l’on
décomposera en une somme d’efforts sinusoïdaux assimilables à
des masses tournant à la vitesse du vilebrequin, ,
(§ 3.1) ; elle engendre donc une force verticale d’ordres1, 2, 4, 6, ...
Pour un moteur monocylindre, la force d’inertie alternativeengendre uniquement des efforts de pilon d’ordres 1, 2, 4, 6, ...
Pour un moteur multicylindre, les forces d’inertie alternatives secomposent autour du point central O du vilebrequin et engendrentdes efforts de pilon d’ordres 1, 2, 4, 6, ... et des couples de galopd’ordres 1, 2, 4, 6, ...
Les tableaux 1 et 2 récapitulent les effets des forces d’inertie.
Nous allons maintenant étudier séparément l’équilibrage de cesdeux types de force ; les masses nécessaires à l’équilibrage desinerties rotatives s’ajoutent à celles nécessaires à l’équilibrage desinerties alternatives pour former les contrepoids à placer sur levilebrequin. (0)
(0)
Figure 4 – Position de la masse rotative
Y0
Remarque importante : le plan médian d’un vilebrequin estle plan perpendiculaire à l’axe de rotation passant par le pointcentral de celui-ci.
Lorsque le plan médian est plan de symétrie, les couples degalop et de lacet sont nuls. En effet, le couple dû à chaquemanivelle sera compensé par le couple dû à la manivelle placéesymétriquement par rapport au plan médian, l’effort étant le
même, et la distance le long de l’axe étant positive pour
l’une et négative pour l’autre (figure 5).
θ̇ 2 θ̇
4 θ̇ , 6θ̇ , ...
Z0
Tableau 1 – Nature des efforts et des couples engendrés par la masse rotative et la masse alternative
Efforts et couples Tamis Pilon Galop Lacet
Effet dela masserotative
sur moteurmonocylindre
ouid’ordre 1
ouid’ordre 1 non non
sur moteurmulticylindre
ouid’ordre 1
ouid’ordre 1
ouid’ordre 1
ouid’ordre 1
Effet dela masse
alternative
sur moteurmonocylindre non oui
d’ordres 1, 2, 4, 6, ... non non
sur moteurmulticylindre non oui
d’ordres 1, 2, 4, 6, ...oui
d’ordres 1, 2, 4, 6, ... non
Tableau 2 – Nature des efforts et des couples appliqués à un moteur monocylindre et à un moteur multicylindre
Effortset couples
Tamis Pilon Galop Lacet
ordre 1 ordre 1 ordres 2, 4, 6 ... ordre 1 ordres 2, 4, 6 ... ordre 1
Efforts et couples appliqués
à un moteurmonocylindre
ouidû à mrot
ouidû à mrot + malt
ouidû à malt
non non non
Efforts et couples appliqués
à un moteurmulticylindre
ouidû à mrot
ouidû à mrot + malt
ouidû à malt
ouidû à mrot + malt
ouidû à malt
ouidû à m rot
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 5

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
2. Équilibragedes masses rotatives
2.1 Étude théorique
La force d’inertie rotative est égale à la masse rotative multipliéepar l’accélération rotative. Cependant, l’accélération centripèted’une pièce en rotation donne une force extérieure centrifuge,donc de signe opposé, d’où :
avec accélération instantanée au point A appartenantau repère 1 par rapport au repère 0.
2.1.1 Définition
Dans ce cas, le moteur n’est soumis à aucun effort ni à aucuncouple.
Soit un solide (S) en rotation autour de son axe . Soit P
chaque point du solide ayant pour coordonnées (x, y, z ) et dmP la
masse qui y est ponctuellement concentrée. L’axe est axe
central d’inertie pour le solide si les deux conditions suivantes sontsatisfaites :
■ Condition 1 : le centre de gravité du solide doit être placé sur
l’axe ; pour cela, il faut :
(1)
(2)
■ Condition 2 : l’axe doit être axe principal d’inertie pour lesolide ; pour cela, il faut :
(3)
(4)
Les quatre sommes (1), (2), (3) et (4) sont appelées les « quatresommes fondamentales ».
Remarque : lorsque le plan médian est plan de symétrie, l’axe de rotation est axe
principal d’inertie. Dans ce cas, il suffit de vérifier que le centre de gravité du solide formépar l’ensemble des masses rotatives est sur l’axe de rotation, c’est-à-dire la condition 1.
2.1.2 Équilibrage théorique parfait
On peut toujours équilibrer parfaitement les inerties rotatives enplaçant des masses dans des plans normaux à l’axe de rotation, depart et d’autre du plan contenant la masse à équilibrer.
La démonstration qui suit est valable quel que soit le nombre demasses rotatives à équilibrer mais, pour simplifier les calculs, nousla ferons pour une seule masse.
Soit M un point appartenant au plan de masse rotative
mrot à équilibrer (figure 6). Soit deux plans perpendiculaires à l’axe
de rotation placés de part et d’autre du plan . La position
de chaque plan est donnée par .
Chaque plan possède respectivement une masse m1 et m 2 ,concentrée aux points M1 et M2 .
Pour que le solide formé par les trois masses en rotation soit par-faitement équilibré, il faut que les quatre sommes fondamentalessoient nulles :
(1) ⇒ x1m1 + x2m2 + xmrot = 0(2) ⇒ y1m1 + y2m2 + ymrot = 0(3) ⇒ x1z1m1 + x2z2m2 = 0(4) ⇒ y1z1m1 + y2z2m2 = 0
C’est un système de quatre équations à quatre inconnues ; aprèsrésolution :
On connaît x , y et mrot . On choisit a priori la position des deuxplans : on connaît donc z1 et z2 .
1) Si l’on se fixe les masses m1 et m2 , les quatre équationsdonnent les distances x1 , x2 , y1 et y2 .
2) Si l’on se fixe les abscisses x1 et x2 , les quatre équationsdonnent les masses m1 et m2 et leurs ordonnées y1 et y2 .
Figure 5 – Schéma de l’annulation des coupleslorsque le plan médian est plan de symétrie
Pour que les inerties rotatives soient parfaitement équi-librées, il faut et il suffit que l’axe de rotation soit un axe cen-tral d’inertie pour les masses rotatives.
Frot m rot Γ A, 1/0 ( )⋅ –=
Γ A,1/0( )
Z0
Z0
Z0
x dmP⋅P S( )∈∑ 0=
y dmP⋅P S( )∈∑ 0=
Z0
x z dmP⋅ ⋅P S( )∈∑ 0=
y z dmP⋅ ⋅P S( )∈∑ 0=
Z 0
X0 , Y0( )
X0 , Y0( )
OO1 z1 Z0 et = OO2 z2 Z0 =
x1m1x z2
z1 z 2–------------------ m rot =
y
1
m
1
y z
2
z1 z2–------------------ m rot =
x
2
m
2
x z
1
z 2 z1–------------------ m rot =
y
2
m
2
y z
1
z2 z1–------------------ m rot =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 6 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
On peut donc toujours réaliser l’équilibrage théorique parfait.
2.2 Moteur monocylindre
Soit
m
rot
la masse rotative attachée au maneton ; on supposequ’elle est concentrée au point A de coordonnées :
(figure
7
a
)
La masse rotative est parfaitement équilibrée si les quatresommes fondamentales sont nulles :
(2)
pour laquelle ce n’est pas le cas.
Lorsque le vilebrequin a tourné d’un angle
θ
, le moteur est soumis
à un effort de tamis d’ordre 1 de valeur et à un
effort de pilon d’ordre 1 de valeur . Pour équilibrer
la masse rotative, on place dans le prolongement des bras de mane-ton des masses
m
1
et
m
2
concentrées aux points
M
1
et
M
2
à unedistance
y
1
et
y
2
de l’axe de rotation (figure
7
b
) :
Il faut que les quatre sommes fondamentales soient nulles :
(2)
(4)
Pour réaliser physiquement cet équilibrage, il y a une infinité desolutions possibles ; la plus courante consiste à utiliser deux masseségales
m
1
=
m
2
. L’équation (4) donne alors
y
1
=
y
2 et l’équation (2)
donne
y
1
m
1
= –
Rm
rot
/2. La distance
y
1
est fonction de l’encombre-ment disponible ; on choisira
y
1
le plus grand possible pour que
m
1
soit le plus faible possible afin d’avoir le vilebrequin le plus légerpossible.
Figure 6 – Équilibrage théorique parfaitd’une masse rotative
OA �0
R
0�
X0
Y0
Z0
=
y m∑ R mrot 0≠=
m rot – R θ ˙ 2 θ sin ( )
mrotRθ̇ 2 θcos( )
OM1 �0
y1
a2------�
X0
Y0
Z0
= OM2 �0
y2
a 2 -----– �
X
0
Y
0
Z 0
=
y m∑ R m rot y1m1 y2m2+ + 0= =
y z m∑ y1 a 2 ----- m 1 y 2
a 2 ----- m 2 – 0 = =
Figure 7 – Moteur monocylindre
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 7

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Afin de pouvoir comparer les masses des différents vilebrequinsque nous allons étudier, nous nous fixerons pour toute l’étude àvenir
y
1
= –
R
comme encombrement maximal théorique
.
Dans ce cas,
m
1
=
m
rot
/2 et la masse du vilebrequin formé parl’ensemble des masses ponctuelles est 2
m
rot
.
2.3 Moteurs multicylindres en ligne
Les manivelles d’un multicylindre en ligne 4 temps sont calées
régulièrement à ,
n
représentant le
nombre de cylindres. Cette répartition symétrique des massesrotatives autour de l’axe de rotation assure souvent naturellementl’équilibrage. Si ce n’est pas le cas, il faut reprendre l’étude théoriqueafin de déterminer le nombre, la position et la valeur des contrepoids.
2.3.1 Moteur 2 cylindres en ligne 4 temps
Les manivelles sont calées à 2
π
, le vilebrequin est symétrique parrapport à son plan médian (figure
8
). Pour ce moteur, on pourra éga-lement utiliser le vilebrequin du moteur 2 temps, quitte à dégraderla régularité du couple moteur instantané. Nous reviendrons sur cechoix après l’équilibrage des masses alternatives (§ 3.3.2).
Soit
m
rot
la masse rotative attachée à chaque maneton ; onsuppose qu’elle est concentrée aux points A
1
et A
2
de coordonnées :
Le plan médian étant plan de symétrie, le moteur n’est soumis àaucun couple. Les masses rotatives sont parfaitement équilibréessi les deux premières sommes fondamentales sont nulles :
(2)
pour laquelle ce n’est pas le cas.
Le moteur est soumis à un effort de tamis d’ordre 1 de valeur
et à un effort de pilon d’ordre 1 de valeur
.
Pour équilibrer les masses rotatives, il y a une infinité desolutions possibles.
2.3.1.1 Équilibrage maneton par maneton
On équilibre séparément chaque maneton (figure
9
a
) commepour le moteur monocylindre en plaçant quatre masses égales dansle prolongement de chaque bras de maneton à une distance
y
1
telleque
y
1
m
1
= –
Rm
rot
/2.
4πn
--------- � 2 π n --------- pour un 2 temps �
OA 1 �0
R
a�
X0
Y0
Z0
= OA 2 �0
R
a – �
X
0
Y
0
Z 0
=
Figure 8 – Moteur 2 cylindres en ligne 4 temps : vilebrequin
ym∑ 2R m rot 0≠=
2 m rot – R θ ˙ 2 θ sin ( )
2mrot Rθ̇ 2 θcos( )
Figure 9 – Moteur 2 cylindres en ligne 4 temps : équilibrage des masses rotatives
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 8 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Si
y
1
= –
R
est l’encombrement maximal théorique,
m
1
=
m
rot
/2.La masse du vilebrequin formé par l’ensemble des massesponctuelles est 4
m
rot
.
2.3.1.2 Équilibrage par deux masses
Ces deux masses peuvent être placées dans des plans symé-
triques par rapport au plan ou non.
■
On choisit, par exemple, les plans symétriques extérieurs(figure
9
b
,
I
) :
Il faut que les quatre sommes fondamentales soient nulles :
(2)
(4)
Si l’on choisit
y
1
=
y
2
, (4)
⇒
m
1
=
m
2
et (2)
⇒
y
1
m
1
= –
Rm
rot
.
Si
y
1
= –
R
est l’encombrement maximal théorique,
m
1
=
m
rot
. Lamasse du vilebrequin formé par l’ensemble des masses ponctuellesest 4
m
rot
.
■
Si l’on recommence cette étude avec les deux masses placéesdans les plans symétriques intérieurs (figure
9
b
,
II
), on trouve lemême résultat.
■
Si l’on recommence avec les deux masses placées dans les plansnon symétriques (figure
9
b
,
III
), on obtient, en gardant
y
1
=
y
2
,
m
1
=
m
rot
/2,
m
2
= 3
m
rot
/2 et l’on trouve la même masse devilebrequin 4
m
rot
.
2.3.1.3 Conclusion
Le moteur 2 cylindres en ligne 4 temps n’étant soumis qu’auxefforts, lorsqu’on réalise l’équilibrage parfait, le nombre et la positiondes contrepoids n’ont pas d’influence sur la masse du vilebrequin.Il n’y a pas de compromis masse du vilebrequin-rigidité à trouver.On choisit donc la solution qui apporte le maximum de rigidité auvilebrequin pour avoir les plus faibles déformations locales despaliers. Dans ce cas, c’est l’équilibrage maneton par maneton.
2.3.2 Moteur 2 cylindres en ligne 2 temps
Les manivelles sont calées à
π
, les manetons sont opposés(figure
10
). Soit
m
rot
la masse rotative attachée à chaque maneton,concentrée aux points A
1
et A
2
de coordonnées :
Les masses rotatives sont parfaitement équilibrées si les quatresommes fondamentales sont nulles :
(4)
pour laquelle ce n’est pas le cas.
Le moteur est soumis à un couple de galop d’ordre 1 de valeur :
soit ,
et à un couple de lacet d’ordre 1 de valeur :
soit .
2.3.2.1 Équilibrage maneton par maneton
La méthode d’équilibrage est la même que pour le moteur 2cylindres en ligne 4 temps et conduit au même résultat (§ 2.3.1.1).
2.3.2.2 Équilibrage par deux masses
Ces deux masses peuvent être placées dans des plans symé-
triques par rapport au plan ou non.
■
On choisit, par exemple, les plans symétriques extérieurs(figure
11
a
,
I
) :
Il faut que les quatre sommes fondamentales soient nulles :
(2)
(4)
Si l’on choisit :
y1 = – y2 , (2) ⇒ m1 = m2 et (4) ⇒
Si y1 = – R est l’encombrement maximal théorique, m1 = 2m rot /3.La masse du vilebrequin est 3,333 mrot .
■ Si l’on recommence cette étude avec les deux masses placéesdans les plans symétriques intérieurs (figure 11a, II), on obtientm1 = m2 = 2mrot et mvil = 6mrot .
■ Si l’on recommence avec les deux masses placées dans les plansnon symétriques (figure 11a, III), on obtient m1 = m2 = mrot etmvil = 4mrot .
X0 , Y0( )
OM1 �0
y1
3a2
---------�X0
Y0
Z0
= OM2 �0
y2
3 a 2 ---------– �
X
0
Y
0
Z 0
=
y m∑ 2Rm rot y1m1 y2m 2+ + 0= =
y z m∑ y1 3
a 2
--------- m 1 y 2 3
a 2
--------- m 2 – 0 = =
OA 1 �0
R
a�
X0
Y0
Z0
= OA 2 �0
R –
a – � X
0
Y
0
Z 0
=
y z m∑ 2R a mrot 0≠=
Figure 10 – Moteur 2 cylindres en ligne 2 temps : vilebrequin
a Z0 mrotRθ̇2 θcos( ) Y0 a Z0– mrotRθ̇2 θ π+( )cos( ) Y0∧∧
2 am rot R θ ˙ 2 θ X 0 cos –
a Z0 m rot R θ ˙ 2 θ sin ( ) – X 0 a Z 0 – � m rot R θ ˙ 2 θ π + ( ) sin � – X 0 ∧∧
2 am rot R θ ˙
2 θ Y 0 sin –
X0 , Y0( )
OM1 �0
y1
3a2
---------�X0
Y0
Z0
= OM2 �0
y2
3 a 2 ---------– �
X
0
Y
0
Z 0
=
y m∑ y1m1 y2m2+ 0= =
y z m∑ 2R a mrot y1 3
a 2
--------- m 1 y 2 3
a 2
--------- m 2 –+ 0 = =
y1m1 23 ----- Rm rot –=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 9

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Le moteur 2 cylindres en ligne 2 temps étant soumis aux couples,lorsqu’on réalise l’équilibrage parfait, le nombre et la position descontrepoids ont une grande influence sur la masse du vilebrequin.On a donc intérêt à les placer le plus loin possible du point centralpour avoir la masse la plus faible ; il y a un compromis masse duvilebrequin-rigidité à trouver. Si le vilebrequin est suffisammentrigide, on choisit le cas des plans symétriques extérieurs car c’estla solution la plus légère. Cependant, si le vilebrequin manque derigidité, cette solution amène une déformation du palier intermé-diaire. Pour la limiter, on est conduit à rajouter des contrepoids dansles plans intérieurs : c’est l’équilibrage par quatre contrepoids.
2.3.2.3 Équilibrage par quatre masses
L’équilibrage par quatre masses le plus évident est l’équilibragemaneton par maneton (§ 2.3.1.1) ; dans ce cas, les quatre massessont égales. Ce n’est pas le compromis idéal dans lequel on placeles masses les plus lourdes le plus loin possible du point central et,dans les plans intérieurs, des masses juste suffisantes pour éviterde trop grandes déformations du palier central.
Si l’on écrit le système d’équations avec quatre masses symé-triques deux à deux par rapport au point central (figure 11b ), ontrouve :
Si y1 = – R est l’encombrement maximal théorique :
3 m1 + m2 = 2 mrot
Il y a trois cas possibles, selon la valeur que l’on donne à m2 .
■ Cas 1 : équilibrage par deux masses m1 égales :
On se trouve dans le cas du vilebrequin de masse 3,333 mrot .C’est le plus léger possible.
■ Cas 2 : équilibrage par quatre masses m1 égales :
On se trouve dans le cas de l’équilibrage maneton par maneton.C’est le plus rigide possible.
■ Cas 3 : équilibrage par quatre masses égales deux à deux.
Il y a une infinité de cas intermédiaires 0 < m2 < m1 . La valeur dem2 dépend de la rigidité que l’on veut donner au palier central. Sipar exemple : m2 = m1/2, alors m1 = 4mrot / 7 et m2 = 2mrot / 7. Lamasse du vilebrequin est 3,714 mrot .
Pour équilibrer le moteur 2 cylindres en ligne 2 temps, on choisitle cas 1 ou le cas 3, le cas 2 est rare.
2.3.2.4 Conclusion
Dans ces deux solutions, le vilebrequin est plus léger que celuidu moteur 4 temps. On pensera donc à utiliser le vilebrequin dumoteur 2 temps pour le moteur 4 temps, quitte à dégrader larégularité d’allumage.
Figure 11 – Moteur 2 cylindres en ligne 2 temps : équilibrage des masses rotatives
3m1 m2+ 2
Ry 1 --------- m rot –=
m 2 0 m1⇒ 23----- m rot = =
m2 m1 m1⇒mrot
2--------------= =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 10 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
2.3.3 Moteur 3 cylindresen ligne 4 temps et 2 temps
Les manivelles sont calées à 240
o
ou à 120
o
, ce qui donne le mêmevilebrequin (figure
12
). Soit
m
rot
la masse rotative attachée à chaquemaneton, concentrée aux points A
1
, A
2
et A
3
de coordonnées :
Les quatre sommes fondamentales ne sont pas nulles :
(3)
(4)
Le moteur est soumis à un couple de galop d’ordre 1 de valeur :
soit ,
et à un couple de lacet d’ordre 1 de valeur :
soit .
Le moteur étant soumis aux couples, il faut réaliser l’équilibrageparfait en choisissant un compromis masse-rigidité. Les solutionsà deux contrepoids manquent de rigidité, on ne les utilise jamais.Il faut au minimum quatre contrepoids ; ce sera un cas particulierde l’équilibrage par six contrepoids.
2.3.3.1 Équilibrage maneton par maneton
On place dans le prolongement de chaque bras de maneton unemasse
m
1
(figure
13
a
) à une distance
y
1
telle que :
Si
y
1
= –
R
est l’encombrement maximal théorique,
m
1
=
m
rot
/2.La masse du vilebrequin est 6
m
rot
.
2.3.3.2 Équilibrage par six massesdont trois dans la même position
On choisit dès le départ l’hypothèse de quatre masses
m
1
lourdes placées sur les manetons extérieurs et deux masses
m
2
légères placées sur le maneton intérieur (figure
13
b
), tel que :
Il faut que les quatre sommes fondamentales soient nulles :
(1)
(2)
(3)
(4)
(1)
⇒
x
1
= –
x
2
(2)
⇒
y1 = – y2 (3)
(4)
Si R est l’encombrement maximal théorique, la position descontrepoids est telle que :
d’où
et
Figure 12 – Moteur 3 cylindres en ligne 2 temps et 4 temps : vilebrequin (calage à 120o)
OA 1 � 0
R
2a�
X0
Y0
Z0
= OA 2 � 3
2 ---------- R –
R 2 -----–
0
� X
0
Y 0
Z
0
=
OA
3
�
32
---------- R
R 2 -----–
2 a – � X
0
Y
0
Z 0
=
x z m∑ 3 a R m rot 0 ≠ –=
y z m∑ 3a R mrot 0≠=
2a Z0 �m rotRθ̇ 2 θ� Y0cos∧ 2 a Z 0 � m rot R θ ˙ 2 � θ 4 π 3
---------+ � � Y 0 cos ∧ –
2 3 a m rot R θ ˙ 2 � θ π
6 -----+ � X 0 cos –
2 a Z0 � – m rot R θ ˙ 2 θ � X 0 sin ∧ 2 a Z 0 � – m rot R θ ˙
2 ( θ 4 π
3
---------+ ) � X 0 sin ∧ –
2 3 a m rot R θ ˙ 2 � θ π 6
-----+ � Y 0 sin –
y1m1 R 2 ----- m rot –=
OM1 �x1
y1
5a2
---------�X0
Y0
Z0
= OM2 �x1
y1
3a2
---------�X0
Y0
Z0
=
OM3 �x1
y1
a2-----�
X0
Y0
Z0
=
OM5 �x2
y2
3 a 2 ---------– �
X
0
Y
0
Z 0
=
O
M
4
�
x
2
y
2
a 2 ------– �
X
0
Y
0
Z 0
=
O
M
6
�
x2
y2
5 a 2 ---------– �
X
0
Y
0
Z 0
=
x m∑ 2x1m1 x1m2 x2m 2 2x2m1+ + + 0= =
y m∑ 2y1m1 y1m2 y2m 2 2y2m1+ + + 0= =
x z m∑ 3 aR m rot 4 x 1 a m 1 x 1 a 2 ----- m 2 x 2 a
2 ----- m 2 –+ +–=
4 x 2 am 1 – 0 =
y z m∑ 3aR m rot 4y1am1 y1 a 2 ----- m 2 y 2
a 2 ----- m 2 –+ +=
4 y 2 am 2 – 0 =
x1⇒3 Rmrot
8m1 m2+---------------------------=
y1⇒ 3
Rm
rot 8 m
1 m
2
+----------------------------–=
x 12 y 1
2+ R 2=
8m1 m2+ 2 3 mrot=
x1R2----- y1 3
2 ---------- R –= =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 11

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Figure 13 – Moteur 3 cylindres en ligne 2 temps et 4 temps : équilibrage des masses rotatives
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
B 2 770
−
12
© Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Les trois premiers contrepoids sont placés 30
o
après leprolongement des bras de maneton 1, les trois autres sont placéssymétriquement par rapport au point O (figure
13
b
).
Il y a trois cas possibles, selon la valeur que l’on donne à
m
2
.
■
Cas 1 :
équilibrage par quatre masses
m
1
égales :
C’est le vilebrequin le plus léger possible.
■
Cas 2 :
équilibrage par six masses
m
1
égales :
C’est le vilebrequin le plus rigide possible dans cette géométrie.
■
Cas 3 :
il y a une infinité de cas intermédiaires 0 <
m
2
<
m1 . Si, par
exemple, . La
masse du vilebrequin est 5,038 mrot .
2.3.3.3 Équilibrage par six massesdont deux dans la même position
Cette disposition est issue du raisonnement suivant : pourrigidifier les paliers intermédiaires, l’idéal est de placer les massesdu maneton 2 à l’opposé de la masse rotative, c’est-à-dire dans leprolongement des bras de maneton (figure 13c ) et non à 90o deceux-ci (figure 13b ). On pourrait réécrire le système d’équations,mais on peut se contenter d’une démonstration graphique.
Si l’on part de l’équilibre parfait réalisé dans le paragraphe 2.3.3.2,cas 1 (figure 13b ) et que l’on place des masses dans le pro-
longement des bras du maneton 2, on conçoit l’obligation de refer-mer les masses m1 d’un angle α et de les alourdir jusqu’à une
valeur afin de conserver l’équilibrage parfait existant
(figure 13c ).
L’effort dans l’axe du maneton 2, qui était nul, doit rester nul,d’où :
L’effort dans la direction 30o, qui était , doit êtreconservé d’où :
Il y a trois cas possibles, selon la valeur que l’on donne à .
■ Cas 1 : équilibrage par quatre masses égales :
C’est le cas 1 du paragraphe 2.3.3.2, les masses du maneton 1sont placées 30o après le prolongement des bras de maneton 1, lesmasses du maneton 3 sont placées symétriquement par rapport aupoint O. La masse du vilebrequin est 4,732 mrot .
■ Cas 2 : équilibrage par six masses égales.
On se trouve dans le cas de l’équilibrage maneton par maneton ;les masses attachées à chaque maneton sont placées dans leprolongement des bras de ceux-ci. La masse du vilebrequinest 6 mrot .
■ Cas 3 : il y a une infinité de cas intermédiaires . Si,
par exemple, alors α = 14,48o et
et . Les masses du maneton 1 sont placées 15,52o
après le prolongement des bras de maneton 1, celles du maneton 2sont placées dans le prolongement des bras de maneton 2, et cellesdu maneton 3 sont placées 15,52o avant le prolongement des bras demaneton 3 (figure 13c ). La masse du vilebrequin est 5,236 mrot .
2.3.3.4 Conclusion
Pour équilibrer le moteur 3 cylindres en ligne, si le vilebrequin estsuffisamment rigide, on utilise la solution en quatre contrepoids(4,732 mrot) sinon la solution en six contrepoids dont trois dans lamême position (5,038 mrot). Si le vilebrequin manque toujours derigidité, on utilise la solution en six contrepoids dont deux dans lamême position (5,236 m rot ) et, en extrême limite, l’équilibragemaneton par maneton (6 mrot).
2.3.4 Moteur 4 cylindres en ligne 4 temps
Les manivelles sont calées à 180o, il y a deux vilebrequinspossibles ; on choisit celui dont le plan médian est plan de symétriecar il n’est pas soumis aux couples (figure 14a ).
Soit mrot la masse rotative attachée à chaque maneton, concentréeaux points A1 , A2 , A3 et A4 de coordonnées :
Les masses rotatives sont parfaitement équilibrées car les deuxpremières sommes fondamentales sont nulles. La répartition desmasses rotatives autour de l’axe de rotation assure naturellementl’équilibrage sans apport de contrepoids. En ce qui concerne l’équi-librage, le vilebrequin peut donc théoriquement être utilisé tel quel,l’effort appliqué par le moteur sur le milieu extérieur est constant ;le moteur n’a donc pas de mouvement sur ses supports.
Cependant, ce moteur ne pourrait fonctionner que quelquesheures car il subirait d’énormes efforts internes. En effet, dans lapratique, le vilebrequin n’est pas infiniment rigide ; il fléchit sousl’effet des forces centrifuges locales (figure 14b ), ce qui provoquedes déformations de la ligne d’arbre et des contraintes dans le filmd’huile et affecte gravement la tenue en endurance des coussinets.Une bonne rigidité de vilebrequin est nécessaire à la bonne tenueen endurance de la ligne d’arbre. Pour obtenir cette rigidité, onajoute des contrepoids.
Il n’y a que deux solutions : quatre ou huit contrepoids (figure 15).On prendra soin de les placer symétriquement par rapport au planmédian tout en conservant le centre de gravité sur l’axe de rotationpour ne pas rompre l’équilibre qui existe naturellement. La valeurdes contrepoids est fonction de la rigidité initiale du vilebrequin(recouvrement, matière, etc.) et des déformations acceptables de laligne d’arbre ; mais cela ne pourra être mis en évidence qu’aprèsde nombreux essais d’endurance. Il faut donc trouver un compromismasse-rigidité.
m2 0 m1⇒ 34
---------- m rot et m vil 4,732 m rot = = =
m2 m1 m1⇒ 2 39
-------------- m rot et m vil 5,309 m rot = = =
m2m1
2---------- alors m1
4 317
-------------- m rot = = et m 2 2 317
-------------- m rot =
m ′2
m ′1
2m ′1 αsin m ′2 αsin⇒m ′2
2m ′1-----------------= =
2m1R θ̇ 2
2m ′1 αcos 2m1 avec m134
---------- m rot m ′ 1 ⇒ 34
α cos
-------------------- m rot = = =
m ′2m ′1
m ′2 0 α⇒ 0o et m ′134
---------- m rot = = =
m ′1
m ′2 m ′1 α⇒ 30o et m ′1mrot
2-------------= = =
Il est fondamental de comprendre qu’ils ne servent pas àéquilibrer le moteur mais à diminuer les efforts internes.
0 m ′2 m ′1< <
m ′2 m ′1/ 2= m ′1 0,447 m rot =
m ′2 0,224 m rot =
OA 1 �0
R
3a�
X0
Y0
Z0
= OA 2 �0 R –
a
�
X
0
Y 0
Z
0
=
OA
3
�0
R –
a – � X
0
Y
0
Z 0
=
OA
4 �
0
R 3 a – �
X
0
Y
0
Z 0
=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 13

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
2.3.5 Moteur 4 cylindres en ligne 2 temps
Les manivelles sont calées à 90o, il y a deux vilebrequinspossibles : le vilebrequin en croix et celui en quadrature.
(0)
2.3.5.1 Vilebrequin en croix
Les quatre sommes fondamentales ne sont pas nulles(figure 17a ) :
(3)
(4)
Figure 14 – Moteur 4 cylindres en ligne 4 temps
Exemple : moteur 4 cylindres en ligne 4 temps à allumagecommandé de 1 775 cm3 suralimenté de compétition automobile.
L’étude est faite pour quatre configurations de vilebrequin(figures 16a, 16b, 16c ) :
1. quatre contrepoids de géométrie (a ) ;2. huit contrepoids de géométrie (a ) ;3. huit contrepoids allégés de géométrie (b ) ; l’allégement du
contrepoids correspond au gain de matière côté maneton ;4. huit contrepoids allégés de géométrie (c ).Le tableau 3 donne les résultats : effort maximal instantané et effort
moyen du vilebrequin sur le coussinet du palier central (calculésà 8 200 tr/min pleine charge), ainsi que la masse du vilebrequin.
— Entre les configurations 1 et 2, le vilebrequin à huit contrepoidsest plus rigide que celui à quatre contrepoids. Les efforts sur le paliercentral sont plus faibles, la tenue en endurance sera meilleure, mais levilebrequin est plus lourd.
— Entre les configurations 2 et 3, la diminution de la masse rotativepermet de diminuer le contrepoids et d’alléger le vilebrequin sansaugmenter les efforts sur le palier central. La tenue en endurance estéquivalente, on a donc toujours intérêt à diminuer la masse rotative.
— Entre les configurations 3 et 4, la masse rotative est restée lamême mais le contrepoids a été allégé. Les efforts sur le palier centralsont plus élevés, la tenue en endurance est dégradée mais levilebrequin est plus léger. Seul un essai d’endurance permet de savoirsi la configuration 4 est acceptable pour une utilisation prévue dumoteur.
Figure 15 – Moteur 4 cylindres en ligne 4 temps :position des contrepoids
x z m∑ 2 aR m rot 0 ≠ –=
y z m∑ 2aRm rot 0≠=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 14 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Le moteur est soumis à un couple de galop d’ordre 1 de valeur
et à un couple de lacet d’ordre 1 de
valeur .
Si l’on réécrit le système d’équations général avec huit massesd’équilibrage sans faire d’hypothèse sur leurs positions, le systèmeconduit à placer les quatre premières 45
o
après le prolongement desbras de maneton 1 et les quatre autres symétriquement par rapportau point O. Mais cette disposition est impossible à réaliser dans lapratique, car il y a un problème d’encombrement pour lescontrepoids des manetons 2 et 3. Il faut donc s’imposer la positiondes masses. Si l’on suppose qu’elles sont placées dans leprolongement des bras de maneton à la distance
R
représentantl’encombrement maximal théorique, le système d’équations généraldevient :
(1)
m
5
+
m
6
=
m
7
+
m
8
(2)
m
1
+
m
2
=
m
3
+
m
4
(3)
(4)
Il y a trois cas possibles.
■
Cas 1 :
équilibrage par huit masses
m
1
égales.
Si l’on choisit m 1 = m
2 = m 3 = m
4 et m 5 = m
6 = m 7 = m
8 alors m 1
= m 5
= m rot
/ 2, on se trouve dans le cas de l’équilibragemaneton par maneton. La masse du vilebrequin est 8
m
rot
.
■ Cas 2 : équilibrage par quatre masses m1 égales.
Si l’on choisit m2 = m3 = 0 et m6 = m 7 = 0, alors les massesvalent 2mrot / 3. La masse du vilebrequin est 6,666 mrot .
■ Cas 3 : il y a une infinité de cas intermédiaires avec :
Dans ce cas, m5 = m8 et m1 = m4 . Si, par exemple, on choisitm2 = m1 /2 et m6 = m5 /2, alors m1 = m5 = 4mrot / 7. La masse duvilebrequin (figure 17b ) est 7,429 mrot .
2.3.5.2 Vilebrequin en quadrature
Les quatre sommes fondamentales ne sont pas nulles(figure 18a ) :
(3)
(4)
Le moteur est soumis à un couple de galop d’ordre 1 de valeur :
Figure 16 – Exemples de forme de contrepoids
Tableau 3 – Moteur 4 cylindres en ligne 4 temps :efforts sur le palier central et masse du vilebrequin
en fonction de la géométrie des contrepoids
ConfigurationEffort
maximal(daN)
Effortmoyen(daN)
Massedu vilebrequin
(kg)
1 5 000 3 000 14,022 3 600 1 830 17,05
3 3 600 1 810 14,94
4 4 100 2 240 14,18
2 2 a m rot – R θ ˙ 2 � θ π
4
----- � + cos
2 2 a m rot – R θ ˙ 2 � θ π
4 ----- � + sin
2 m rot 12
----- m 5 32
----- m 6 – 52
----- m 7 72
----- m 8 + +–– 0 =
2mrot72----- m 1 5
2 ----- m 2 3
2 ----- m 3 1
2 ----- m 4 ++–– 0 =
Figure 17 – Moteur 4 cylindres en ligne 2 temps :vilebrequin en croix
m2 m3=
m6 m7=
et 0 m2 m1< <
0 m6 m5< <
x z m∑ 2 a R m rot 0 ≠ –=
y z m∑ 6a R mrot 0≠=
2 a m rot R θ ˙ 2 3 θ θ sin – cos ( ) –
2 10 am rot R θ ˙ 2 θ 18,435 + ( ) cos –=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 15

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
et à un couple de lacet d’ordre 1 de valeur :
Si l’on réécrit le système d’équations général avec huit massesd’équilibrage sans faire d’hypothèse sur leurs positions, le systèmeconduit à placer les quatre premières 18,435
o
après le prolongementdes bras de maneton 1 et les quatre autres symétriquement parrapport au point O (figure
18
b
). Cette disposition est réalisable.
Il y a une infinité de cas possibles ; citons les plus fréquents.
■
Cas 1 :
équilibrage par six masses
m
1
égales.
m1 = m2 = m3 et m4 = 0, alors :
■ Cas 2 : équilibrage par six masses égales deux à deux.
Si l’on choisit m1 = 2m2 = 4m3 et m4 = 0, alors :
■ Cas 3 : équilibrage par huit masses égales quatre à quatre.
Si l’on choisit m1 = m2 , m3 = m4 et , alors :
On peut imaginer d’autres cas dans cette disposition, ainsi quela position classique des contrepoids placés dans le prolongementdes bras de maneton.
2.3.5.3 Conclusion
Pour le vilebrequin en croix, l’impossibilité physique de placer lescontrepoids 45o après le prolongement des bras de maneton 1impose de les placer dans le prolongement des bras de maneton.Cela engendre un vilebrequin lourd et, pour cette raison, on luipréfère souvent le vilebrequin en quadrature pour lequel la positiondes contrepoids 18,435o après le prolongement des bras demaneton 1 est réalisable.
2.3.6 Moteur 6 cylindres en ligne 4 temps
Les manivelles sont calées à 120o (figure 19a ). Le plan médianétant plan de symétrie, le moteur n’est soumis à aucun couple. Lesmasses rotatives sont parfaitement équilibrées car les deuxpremières sommes fondamentales sont nulles. Le vilebrequin estdonc parfaitement équilibré sans apport de contrepoids.
Les contrepoids ne servant qu’à limiter les déformations localesdes paliers, on peut les placer dans le prolongement des bras demaneton ou les disposer comme indiqué sur la figure 19b. Lescontrepoids 1, 6, 7 et 12 ont même valeur m1 ; ils sont placés dansle prolongement respectif des bras de chaque maneton. Lescontrepoids 2, 3, 10, 11 et 4, 5, 8, 9 ont même valeur m2 ; ils sontplacés à 60o du prolongement respectif des bras de chaquemaneton. Pour conserver l’équilibre, il faut m1 = 2m2 .
2.4 Moteurs multicylindres en V
Un moteur multicylindre en V est constitué de deux moteurs enligne décalés d’un angle appelé angle d’ouverture du V. Chaquemaneton reçoit deux bielles. Son vilebrequin s’équilibre commecelui d’un moteur en ligne, l’angle d’ouverture du V étant sansimportance puisqu’il s’agit des masses rotatives.
On note Mrot la masse rotative fictive (formée par les deuxflasques, le maneton et les deux têtes de bielle) concentrée à ladistance R de l’axe de rotation.
2.4.1 Moteur 2 cylindres en V
Son vilebrequin est celui du monocylindre (figure 7). Il est
soumis à un effort de tamis d’ordre 1 de valeur et
à un effort de pilon d’ordre 1 de valeur .
2.4.2 Moteur 4 cylindres en V
Si l’on utilise le vilebrequin du moteur 2 cylindres en ligne 2 temps(figure 10), il est soumis à un couple de galop d’ordre 1 de valeur
et à un couple de lacet d’ordre 1 de valeur
.
Figure 18 – Moteur 4 cylindres en ligne 2 temps :vilebrequin en quadrature
2 am rot R θ ˙ 2 3 θ θ cos + sin ( ) –
2 10 am rot R θ ˙ 2 θ 18,435 + ( ) sin –=
m12 10
15----------------- m rot et m vil 6,530 m rot = =
m18 10
41----------------- m rot et m vil 6,160 m rot = =
m3m1
2----------=
m1107
------------- m rot et m vil 6,711 m rot = =
M rot – R θ ˙ 2 θ sin
M rotR θ̇ 2 θcos
2 aM rot R θ ˙ 2 θ cos –
2 aM rot R θ ˙ 2 θ sin –
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 16 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
2.4.3 Moteur 6 cylindres en V
Son vilebrequin est celui du 3 cylindres en ligne (figure
12
). Il estsoumis à un couple de galop d’ordre 1 de valeur :
et à un couple de lacet d’ordre 1 de valeur :
2.4.4 Moteur 8 cylindres en V
On a le choix entre le vilebrequin à plat (le plus utilisé), levilebrequin en croix ou celui en quadrature.
■
Vilebrequin à plat
(figure
14
) : c’est celui du 4 cylindres en ligne4 temps. Il n’est soumis à aucun effort ni à aucun couple. On secontente de le rigidifier.
■
Vilebrequin en croix
(figure
17
) : il est soumis à un couple degalop d’ordre 1 de valeur :
et à un couple de lacet d’ordre 1 de valeur :
■
Vilebrequin en quadrature
(figure
18
) : il est soumis à un couplede galop d’ordre 1 de valeur :
et à un couple de lacet d’ordre 1 de valeur :
2.4.5 Moteur 12 cylindres en V
Son vilebrequin est celui du 6 cylindres en ligne (figure
19
). Iln’est soumis à aucun effort ni à aucun couple. On se contente dele rigidifier.
2.5 Autres types de moteur
Il existe beaucoup d’autres dispositions de cylindres : en étoile,à pistons opposés, etc. que nous ne traitons par car elles ne sontplus utilisées. On peut tout de même citer la disposition à plat,pour laquelle chaque piston est commandé par un maneton(comme pour le moteur en ligne), mais chaque piston est disposéà 180
o
de l’autre.
■
Moteur 2 cylindres à plat
: on utilise le vilebrequin du 2 cylindresen ligne 2 temps (figure
10
) et sa méthode d’équilibrage.
■
Moteur 4 cylindres à plat
: on utilise le vilebrequin du 4 cylindresen ligne 4 temps (figure
14
) et sa méthode de rigidification.
Figure 19 – Moteur 6 cylindres en ligne 4 temps
2 3 aM rot R θ ˙ 2 � θ π 6
----- � + cos –
2 3 aM rot R θ ˙ 2 � θ π 6
----- � + sin –
2 2 aM rot R θ ˙ 2 � θ π
4 ----- � + cos –
2 2 aM rot R θ ˙ 2 � θ π
4
----- � + sin –
2 10 aM rot R θ ˙ 2 θ 18,435 + ( ) cos –
2 10 aM rot R θ ˙ 2 θ 18,435 + ( ) sin –
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 17

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
3. Équilibrage des masses alternatives
3.1 Étude théorique
La force d’inertie alternative est égale à la masse alternativemultipliée par l’accélération alternative :
avec accélération instantanée au point B appartenantau repère 2 par rapport au repère 0,
d
position instantanée du piston sur .
Cette force d’inertie non sinusoïdale est périodique, de période 2
π
,et la théorie ne permet pas de l’équilibrer sous cette forme. Pourpouvoir le faire, il faut la décomposer en une somme de forces sinu-soïdales que nous équilibrerons séparément.
3.1.1 Position du piston.Développement en série de Fourier
À tout moment, le piston est à une position (figure
1
) :
d
=
R
cos
θ
–
L
cos
ϕ
avec pour
λ
=
L
/
R
Toute fonction périodique peut se décomposer en série de Fourier ;la force d’inertie alternative se décompose donc de la manièresuivante :
d
=
R
(cos
θ
– λ cosϕ )
avec :
On remplace les termes en sin2θ, sin4θ, ... par leurs valeurs ensin 2θ, sin 4θ, ... puis on dérive deux fois.
Après calcul, on obtient :
La force en cosθ est appelée force d’inertie alternative d’ordre 1ou effort de pilon d’ordre 1. La force en cos pθ est la force d’inertiealternative d’ordre p ou effort de pilon d’ordre p.
On peut remarquer que la décomposition en série de Fourier n’estformée que de termes en cosinus d’ordre pair car nous sommes dansle cas d’un moteur ayant un cylindre axé et un attelage direct(le cylindre est dit axé si son axe est concourant avec celui duvilebrequin).
Dans le cas général d’un moteur à cylindre désaxé et à attelagearticulé, l’expression est de la forme :
Si le moteur a son cylindre désaxé mais un attelage direct, tousles kp impairs (sauf k1) et tous les pairs sont nuls. Si, en plus,
le cylindre est axé, tous les impairs sont nuls.
De même que pour l’étude des masses rotatives, dans tout cequi suit, nous supposerons que R est l’encombrement maximal, cequi nous permet de simplifier les calculs. Dans la réalité, nousutiliserons l’encombrement maximal disponible, ce qui définiraune nouvelle masse de contrepoids telle que le produit masse xdistance reste constant.
3.1.2 Équilibrage théorique parfait
On sait équilibrer un effort de pilon selon la théorie del’équivalence entre une masse alternative et deux massesrotatives.
■ L’effort de pilon d’ordre 1 vaut avec :
Il est donc la composée de deux forces :
qui sont des forces centrifuges provoquées par deux masses
égales, l’une tournant à , restant symétriques
par rapport à l’axe (figure 20).
Pour équilibrer parfaitement l’effort de pilon d’ordre 1, il fautplacer deux masses égales de valeur malt /2 en opposition avec lemouvement du piston (masses en position inférieure quand lepiston est au point mort haut PMH), l’une tournant avec levilebrequin et l’autre à la même vitesse mais en sens inverse(figure 21a ).
Falt m alt Γ B,2 0 ⁄( )⋅ – m alt d ˙̇ Y 0 –= =
Γ B,2 0⁄( )
Y0
ϕcos 1 sin
2 θ
λ 2 ----------------––=
ϕcos � 1 12
----- sin
2 θ
λ 2 ----------------–
18
----- sin
4 θλ 4 ----------------–
116
-------- sin
6 θ
λ 6 ----------------–
5128
----------- sin
8 θλ 8 ---------------- ... – � ––=
Falt malt Rθ̇ 2 � θ cos � 1 λ ----- 14
λ
3
----------- 15128
λ
5
------------------ 35512
λ
7
------------------ ... � 2cos θ + + + + +=
� 14
λ
3 ----------- 3
16
λ
5 --------------- 35
256
λ
7 ------------------- ... � 4 θ cos � 9
128
λ
5 ------------------- 45
512
λ
7 ------------------- ... + � 6 θ cos +++ + +–
� 5256
λ
7 ------------------- ... � 8 θ cos ... k p p θ cos ... � Y 0 ++ ++–
k1 θcos k 2 2θcos k3 3θcos ... kp pcos θ ...+ + + + +
k ′1 θsin k ′2 2θsin k ′3 3θsin ... k ′p pθsin ...+ + + + + +
Figure 20 – Schéma de l’équivalence entre une masse alternativeet deux masses rotatives (tracé pour l’ordre 1)
k ′pk ′p
malt Rθ̇ 2 θcos
θcos 12----- exp i θ ( ) exp i θ – ( ) + [ ] =
malt
2------------- R θ ˙ 2 exp i θ ( ) et
m
alt 2
------------- R θ ˙ 2 exp i – θ ( )
+ θ ̇ et l ′ autre à θ ̇–
Y0
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 18 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Nota :
la masse tournant avec le vibrequin doit équilibrer l’effort de pilon d’ordre 1 sanscréer de couple ; elle sera donc placée dans le plan médian ou, plus exactement,elle sera divisée en deux masses égales placées symétriquement par rapport au planmédian. Il doit en être de même pour la masse tournant en sens inverse.
Pour équilibrer parfaitement la force d’inertie alternative, il fautéquilibrer chaque ordre séparément selon le même principe.
■
L’effort de pilon d’ordre 2
vaut :
Pour l’équilibrer parfaitement, il faut placer deux masses égales
de valeur en opposition avec le mouvement
du piston, l’une tournant à (figure
21
b
).
■
L’effort de pilon d’ordre 4
vaut :
Pour l’équilibrer parfaitement, il faut placer deux masses égales
de valeur en phase avec le mouvement du
piston (masses en position supérieure quand le piston est au PMH)
car la force a un signe négatif, l’une tournant à (figure
21
c
).
■
Ainsi de suite jusqu’à l’
effort de pilon d’ordre p
pour lequel il faut
placer deux masses égales de valeur en phase ou
en opposition avec le mouvement du piston, selon le signe de la
force, l’une tournant à .
L’équilibrage théorique parfait est donc possible.
3.2 Moteur monocylindre
Le moteur monocylindre est soumis aux efforts de pilon de toutordre mais, dans la pratique, on n’équilibre jamais les effortsd’ordre supérieurs à 2 car, d’une part, c’est technologiquementdifficile (vitesses très élevées) et, d’autres part, c’est inutile puisqueles intensités de ces efforts diminuent très rapidement. On sepropose donc d’équilibrer les efforts de pilon d’ordre 1 et 2.
3.2.1 Équilibrage de l’effort de pilon d’ordre 1
3.2.1.1 Méthode 1 : deux arbres d’équilibrage primaires
En vertu de l’équivalence entre une masse alternative et deuxmasses rotatives, on peut équilibrer parfaitement l’effort de pilond’ordre 1 en réalisant technologiquement cette équivalence. Lesarbres portant les masses d’équilibrage sont appelés
arbresd’équilibrage primaires
tournant à la vitesse du moteur. Sur levilebrequin, on ne rajoute aucun contrepoids (figure
22
a
). Cetteméthode est rarement utilisée car elle nécessite la mise en place dedeux lignes d’arbre entraînées par engrenages, par chaînes ou parcourroies crantées sur les deux faces (voir principe d’entraînement,figure
27
b
), ce qui crée une augmentation de masse, de bruit,d’encombrement, de perte par frottement et de prix.
3.2.1.2 Méthode 2 : un arbre d’équilibrage primaire
Étant donné qu’un des deux arbres de la méthode 1 tourne dansle même sens que le vilebrequin et à la même vitesse, on peut repor-ter la masse attachée à cet arbre sur le vilebrequin, ce qui permetde supprimer un arbre d’équilibrage primaire. La masse
m
alt
/2 seradivisée en deux masses égales que l’on placera dans le prolon-gement des bras de maneton (figure
22
b
). Ces masses s’ajoutentaux contrepoids qui équilibrent déjà les masses rotatives.
Dans cette disposition, l’effort de pilon d’ordre 1 est parfaitementéquilibré mais on crée un couple de basculement non équilibrabledû aux composantes de tamis et de pilon de l’arbre primaire quis’ajoute au couple de basculement « naturel » du moteur dû àl’effort du piston sur la chemise.
Figure 21 – Schéma de l’équilibrage de l’effort de pilon d’ordre 1, 2 ou 4
X 0, Y 0 ( )
� 1λ----- 1
4λ3----------- ...� m alt R θ ˙
2 2cos θ + +
� 1λ----- 1
4λ3----------- ...�
m
alt 8 -------------+ +
2θ̇ , l ′autre à 2 θ ˙–
� 14
λ
3 ----------- 3
16
λ
5 --------------- ... � m alt R θ ˙ 2 4 θ cos + +–
� 14λ3----------- 3
16λ5--------------- ...�
m
alt 32 -------------+ +
4θ̇ , l ′autre à 4 θ ˙–
� Cteλp 1–--------------- ...�
m
alt 2 p 2 -------------+
+ p θ ̇ , l ′ autre à p – θ ˙
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 19

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
3.2.1.3 Méthode 3 : sans arbre d’équilibrage primaire
Cette méthode consiste à supprimer l’arbre primaire de laméthode 2 (figure
22
c
). Dans ce cas, l’effort de pilon d’ordre 1n’est que partiellement équilibré et il apparaît un effort de tamisd’ordre 1. En fonction de la valeur des contrepoids, lorsque l’effortde pilon diminue, l’effort de tamis augmente.
Soit la masse de chaque contrepoids :
— si
k
= 0,5, les valeurs maximales des efforts de pilon et detamis non équilibrés sont égales (cf. méthode 2) ;
— si
k
= 1, l’effort de pilon d’ordre 1 est parfaitement équilibrémais on crée un effort de tamis d’ordre 1 de même valeur ;
— pour tous les cas intermédiaires avec 0,5 <
k
< 1, il reste un
effort de pilon d’ordre 1 de valeur et il
apparaît un effort de tamis d’ordre 1 de valeur .
3.2.2 Équilibrage de l’effort de pilon d’ordre 2
En vertu de l’équivalence entre une masse alternative et deuxmasses rotatives, on peut équilibrer parfaitement l’effort de pilond’ordre 2 en réalisant technologiquement cette équivalence. Lesarbres portant les masses d’équilibrage sont appelés
arbresd’équilibrage secondaires
tournant à 2 fois la vitesse du moteur. Surle vlebrequin, on ne rajoute aucun contrepoids (figure
23
). Si l’onutilise cette disposition, les masses restent symétriques par rapport
à et on ne crée pas de couple de basculement. Cependant, dans
le cas des arbres secondaires, on a intérêt à créer un couple debasculement car il est possible d’équilibrer partiellement le couplede basculement « naturel » du moteur qui est un couple d’ordre 2.Pour ce faire, on utilise la disposition de Lanchester (§ 3.3.4).
3.3 Moteurs multicylindres en ligne
Les manivelles d’un multicylindre en ligne 4 temps sont calées à
,
n
représentant le nombre de cylindres.
3.3.1 Étude théorique
Les efforts alternatifs de tout ordre se composent pour donnerdes efforts de pilon et des couples de galop de tout ordre.
3.3.1.1 Composition des forces d’inertie alternatives d’ordre
p
L’effort de pilon d’ordre
p
du monocylindre est :
k
p
étant une constante de la forme
L’effort de pilon d’ordre
p
du moteur multicylindre en ligne 4temps sera donc :
Figure 22 – Moteur monocylindre : équilibrage de l’effort de pilon d’ordre 1
k m
alt 2 -------------
1 k–( ) m alt R θ ˙ 2 θ cos
k malt R θ̇ 2 θsin
Y0
4πn
--------- � 2 π n --------- pour un 2 temps �
kp malt R θ̇ 2 pcos θ
Cte λ
p
1
– --------------- Cte
λ
p
1
+ --------------- ... ±±±
kp maltj 0=
n 1–
∑ R θ̇ 2 p �θ j 4 π n --------- � + cos
k
p
m
alt
R
θ
˙
2 2 π p sin2
π
p
n
-------------
sin ------------------------ p � θ n 1 –
n -------------- 2 π � + cos =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 20 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Pour le 2 temps, il est de :
Deux cas peuvent se présenter :
■
Cas 1 :
∀
k
entier. Dans ce cas,
on peut utiliser la formule ci-dessus et l’effort de pilon d’ordre
p
vaut
Cte
. sin2
π
p
= 0
■
Cas 2 :
∀
k
entier. I l faut
reprendre la somme initiale :
L’effort de pilon devient :
.
Ainsi, pour un moteur multicylindre en ligne 4 temps dont les
manetons sont calés à :
— si
∀
k
entier, l’effort de pilon d’ordre
p
est nul ;
— si
∀
k
entier, l’effort de pilon d’ordre
p
est égal à
n
fois l’effort de pilon d’ordre
p du monocylindre. Il est doncparfaitement équilibrable selon la théorie de l’équivalence entreune masse alternative et deux masses rotatives.
3.3.1.2 Équilibrage d’un couple de galop d’ordre p
On sait équilibrer un couple de galop d’ordre p selon la théoriede l’équivalence entre un couple alternatif et quatre massesrotatives.
En effet, si l’on fait tourner une masse, on crée des efforts detamis, de pilon et des couples de lacet et de galop. Pour ne pascréer de tamis ni de lacet, on est obligé de placer une deuxièmemasse tournant en sens inverse et pour laquelle le pilon et le galopse cumulent à ceux de la première masse. De plus, pour ne pascréer de pilon, on est obligé de placer deux autres massessymétriquement, pour lesquelles les tamis et lacet s’annulent et lesgalop se cumulent.
En conclusion, pour créer un couple de galop sans créer decouple de lacet ni d’efforts de tamis et de pilon, on a besoin dequatre masses ; il en sera de même si l’on veut équilibrer uncouple de galop sans qu’il existe en même temps un couple delacet ou des efforts de tamis et de pilon.
3.3.1.2.1 Méthode 1 : deux arbres d’équilibrageLes quatre masses sont portées par deux arbres d’équilibrage
tournant en sens inverse à restant symétriques par
rapport à , chaque arbre portant deux masses égales de valeur
mp symétriques par rapport au centre de l’arbre. Afin de profiter aumaximum de l’effet de bras de levier, on place les masses le plusloin possible du centre de l’arbre à une distance b représentant laposition du dernier cylindre (figure 24). Sur le vilebrequin, on nerajoute aucun contrepoids.
Soit β l’angle de calage définissant la position de la masse situéevers les positifs sur l’arbre tournant dans le sens du moteur ;cette masse est située βo après le prolongement de bras demaneton 1 (figure 24a ).
L’arbre 1 engendre un couple de galop d’ordre p de valeur :
et l’arbre 2 engendre le même couple ; ils se cumulent pour donnerle couple d’ordre p résultant :
qui devra compenser le couple de galop d’ordre p dû aux massesalternatives.
L’arbre 1 engendre un couple de lacet d’ordre p de valeur :
et l’arbre 2 engendre un couple d’ordre p opposé ; ils s’annulentdonc.
3.3.1.2.2 Méthode 2 : un arbre d’équilibrage primaireCette méthode n’est pas applicable qu’à l’ordre 1. Étant donné
que l’arbre 2 de la méthode 1 tourne dans le même sens que levilebrequin et à la même vitesse, on peut reporter les massesattachées à cet arbre sur le vilebrequin. Les masses m1 seront divi-sées en deux masses égales que l’on placera sur chaque bras demaneton extérieur. Ces masses s’ajoutent aux contrepoids quiéquilibrent déjà les masses rotatives (figure 24b ).
Contrairement à l’équilibrage de l’effort de pilon d’ordre 1 enmoteur monocylindre, lorsqu’on supprime un arbre primaire, onne crée pas de couple de basculement. La méthode 1 ne sera doncjamais utilisée pour l’ordre 1 alors qu’elle reste impérative pourl’ordre p.
3.3.1.2.3 Méthode 3 : sans arbre d’équilibrage primaireCette méthode n’est pas applicable qu’à l’ordre 1. Elle consiste
à supprimer l’arbre primaire de la méthode 2 ; dans ce cas, lecouple de galop n’est que partiellement équilibré et il apparaît uncouple de lacet. En fonction de la valeur des contrepoids, lorsquele couple de galop diminue, le couple de lacet augmente.
Soit km1 la masse de chaque contrepoids.
Figure 23 – Moteur monocylindre : équilibrage de l’effort de pilon d’ordre 2 par deux arbres d’équilibrage
kp maltR θ̇ 2 π p sin π
p
n
---------
sin
-------------------- p � θ n 1 – n
-------------- π � + cos
2 π pn
-------------- 0≠sin , c ′est-à-dire k 2pn
---------≠
�pour le 2 temps, k pn-----�≠
2 π pn
--------------sin 0= , c ′est-à-dire k 2pn
---------=
kp maltj 0=
n 1–
∑ Rθ̇ 2 p �θ j 4 π n --------- � + cos avec 4 π
n --------- 2 k π
p ------------=
kp m alt j
0
=
n
1
–
∑ R θ ̇ 2 cos p θ j 2 k π + ( ) n k p m alt R θ ̇ 2 cos p θ =
�pour le 2 temps : k pn
----- � =
4πn
---------
k 2pn
---------≠
k 2pn
---------=
+ p θ ̇ et p θ ˙–
Y0
Z0
2p2 bmp R θ̇ 2 pθ β+( )cos
4p 2bmp Rθ̇ 2 pθ β+( )cos
2 – p 2 b m p R θ ˙ 2 p θ β + ( ) sin
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 21

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
— Si
k
= 0,5, les valeurs maximales des couples de galop et delacet non équilibrés sont égales.
— Si
k
= 1, le couple de galop d’ordre 1 est parfaitementéquilibré mais on crée un couple de lacet d’ordre 1 de mêmevaleur.
— Pour tous les cas intermédiaires avec 0,5 <
k
< 1, il reste uncouple de galop d’ordre 1 de valeur :
et il apparaît un couple de lacet d’ordre 1 de valeur :
3.3.2 Moteur 2 cylindres en ligne 4 tempset 2 temps
3.3.2.1 Moteur 2 cylindres en ligne 4 temps
(figure
8
)
■
Tous les couples de galop sont nuls.
■
L’effort de pilon d’ordre
p
n’est pas nul si
k
=
p
∀
k
entier.
●
Pour l’ordre 1, k
= 1 est possible ; l’effort de pilon vaut alors
.
Pour l’équilibrer, il faut un arbre primaire, ce que l’on fait rarement.On peut alors utiliser la méthode 3 du monocylindre (§ 3.2.1.3) ; onplace quatre contrepoids de valeur malt /4 dans le prolongement dechaque bras de maneton. Il reste alors non équilibré un effort de
pilon d’ordre 1 de valeur et il apparaît un effort de
tamis d’ordre 1 de valeur .
● Pour l’ordre 2, k = 2 est possible ; l’effort de pilon vaut
.
Si on veut l’équilibrer, ce qui est rarement fait, on utilise laméthode du monocylindre en multipliant par deux tous lescontrepoids.
● Pour les ordres 4, 6, ..., k = 4, 6, ... est possible mais on ne leséquilibre jamais.
3.3.2.2 Moteur 2 cylindres en ligne 2 temps (figure 10)
■ L’effort de pilon d’ordre p n’est pas nul si ∀ k entier.
● Pour l’ordre 1, est impossible ; l’effort de pilon est nul.
● Pour l’ordre 2, k = 1 est possible ; l’effort de pilon vaut
.
Si on veut l’équilibrer, ce qui est rarement fait, on utilise la méthodedu monocylindre en multipliant par deux tous les contrepoids.
● Pour les ordres 4, 6, ..., k = 2, 3, ... est possible, mais on ne leséquilibre jamais.
■ Le moteur n’est soumis qu’au couple de galop d’ordre 1 qui a pour
valeur . Pour l’équilibrer, on utilise l’équivalence
entre un couple alternatif et quatre masses rotatives. La somme descouples doit être nulle :
avec b = a ⇒ 2 m1 cos (θ + β ) = malt cosθ
Figure 24 – Moteur multicylindre : équilibrage d’un couple de galop par un ou deux arbres d’équilibrage
4 – 1 k – ( ) bm 1 R θ ˙ 2 θ β + ( ) cos
4k b m1R θ̇ 2 θ β+( )sin
2malt Rθ̇ 2 θcos
maltRθ̇ 2 θcos
maltRθ̇ 2 θsin
2 � 1λ----- 1
4λ3----------- ...� m alt R θ ˙ 2 2cos θ + +
k p2-----=
k 12-----=
2 � 1λ----- 1
4λ3----------- ...� m alt R θ ˙ 2 2 θ cos + +
2 am alt R θ ˙ 2 θ cos –
4bm1R θ̇ 2 θ β+( )cos 2amaltR θ̇ 2 θcos– 0=
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 22 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
d’où
β
étant la position de la masse qui tourne avec le vilebrequin, onchoisit la solution en positif, soit
β
= 0.
L’équilibrage parfait est réalisé par des masses placées dans leprolongement des bras de maneton (figure
25
).
Si on supprime l’arbre primaire, il reste un couple de galopd’ordre 1 de valeur et il apparaît un couple delacet d’ordre 1 de valeur : .
On peut aussi n’utiliser que deux masses placées dans les plansextrêmes ; pour avoir les mêmes valeurs de couples, elles doiventvaloir
m
alt
/ 3.
3.3.2.3 Conclusion
■
Pour le moteur 2 cylindres en ligne 2 temps
, il faut un arbreprimaire. Si on ne l’utilise pas, restent non équilibrés :
— les efforts de pilon d’ordres 2, 4, 6, ... ;
— le couple de galop d’ordre 1 de valeur ;
— le couple de lacet d’ordre 1 de valeur .
■
Pour le moteur 2 cylindres en ligne 4 temps
, il faut un arbreprimaire. Si on ne l’utilise pas, restent non équilibrés :
— l’effort de pilon d’ordre 1 de valeur ;
— l’effort de tamis d’ordre 1 de valeur ;
— les efforts de pilon d’ordres 2, 4, 6...
Si l’on analyse ces résultats et ceux des paragraphes 2.3.1et 2.3.2, on préférera utiliser le vilebrequin du moteur 2 temps pourle moteur 4 temps, quitte à dégrader la régularité d’allumage.
3.3.3 Moteur 3 cylindres en ligne 4 tempset 2 temps
(figure
12
)
■
L’effort de pilon d’ordre
p
n’est pas nul si
∀
k
entier.
●
Pour les ordres 1
,
2
,
4
, est impossible ; les efforts
de pilon sont nuls.
●
Pour l’ordre 6
,
k
= 4 est possible ; l’effort d’ordre 6 existe mais ilest extrêmement faible.
■
Le moteur est soumis aux couples de galop d’ordres 1, 2 et 4. Onn’équilibre que le couple d’ordre 1 qui a pour valeur :
L’équivalence entre un couple alternatif et quatre massesrotatives donne :
avec
d’où :
β
étant la position de la masse qui tourne avec le vilebrequin, onchoisit la solution en positif, soit
β
=
π
/6.
L’équilibrage parfait est réalisé par des masses placées 30
o
aprèsle prolongement des bras de maneton 1 (figure
26
).
Si on supprime l’arbre primaire, il reste un couple de galopd’ordre 1 de valeur :
et il apparaît un couple de lacet d’ordre 1 de valeur :
On peut aussi n’utiliser que deux masses placées dans les plans
extrêmes ; elles doivent valoir .
3.3.4 Moteur 4 cylindres en ligne 4 temps
(figure
14
)
. Méthode de Lanchester
■
Tous les couples de galop sont nuls.
■
L’effort de pilon d’ordre
p
n’est pas nul si
∀
k
entier.
●
Pour l’ordre 1
, est impossible ; l’effort de pilon est donc
nul. Ce moteur est bien équilibré.
●
Pour l’ordre 2
,
k
= 1 est possible ; l’effort de pilon vaut
.
On peut l’équilibrer parfaitement par la méthode développée auparagraphe 3.2.2 (figure
23
), en multipliant par quatre tous les
contrepoids. Mais on peut faire mieux en utilisant la disposition deLanchester qui consiste à décaler en hauteur les arbres secondaires(figure
27
a
, et
27
b
), ce qui crée un couple de basculementsecondaire qui équilibre le couple de basculement « naturel » dumoteur créé par les efforts des pistons sur les chemises. La positiondes masses pendant un tour moteur est indiquée sur la figure
27
c
.
m1malt
2------------- et θ β+( )cos θcos θ β+⇒ θ ± 2 k π += = =
am alt R θ ˙ 2 θ cos – amaltRθ̇ 2 θsin
am alt R θ ˙ 2 θ cos – ( )
amaltR θ̇ 2 θsin( )
maltR θ̇ 2 θcos( )
maltR θ̇ 2 θsin( )
k 2p3
---------=
k 23----- ,
43 ----- ,
83 -----=
2 3 am alt R θ ˙ 2 � θ π 6
----- � + cos –
4bm1R θ̇ 2 θ β+( )cos 2 3 amaltR θ̇ 2 �θ π6-----�+cos– 0=
b 2a 4m1 θ β+( )cos⇒ 3 malt cos �θ π6-----�+= =
m134
---------- m alt et θ β + ( ) cos � θ π
6 ----- � + cos = =
θ β
+
⇒ � θ π 6 ----- � + ± 2 k π +=
Figure 25 – Moteur 2 cylindres en ligne 2 temps :équilibrage du couple de galop d’ordre 1
3 am alt R θ ˙ 2 � θ π 6
----- � + cos –
3 amaltR θ̇ 2 �θ π6-----�+sin
3 malt 5⁄
k p2-----=
k 12-----=
4 � 1 λ ----- 14
λ
3
----------- ... � m alt R θ ˙ 2 2 θ cos + +
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 23

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
●
Pour les ordres 4
,
6
, ...,
k
= 2, 3, ... est possible, mais on ne leséquilibre jamais.
3.3.5 Moteur 4 cylindres en ligne 2 temps
3.3.5.1 Vilebrequin en croix
(figure
17
)
■
L’effort de pilon d’ordre
p
n’est pas nul si
∀
k
entier.
●
Pour les ordres 1
,
2
,
6
, est impossible ; les efforts
de pilon sont donc nuls.
●
Pour l’ordre 4
,
k
= 1 est possible, mais on ne l’équilibre pas.
■
Le moteur est soumis aux couples de galop d’ordres 1, 2, 6 ; lecouple d’ordre 4 est nul. Si on veut équilibrer le couple de galop
d’ordre 1 qui vaut , il faut placer sur
l’arbre primaire deux masses de valeur et, sur le
vilebrequin, quatre masses de valeur , l’angle de calage
étant 45
o
.
3.3.5.2 Vilebrequin en quadrature
(figure
18
)
■ Les efforts de pilon sont ceux du vilebrequin en croix.
■ Le moteur n’est soumis qu’au couple de galop d’ordre 1 qui vaut :
Les couples d’ordres 2, 4, 6, ... sont nuls.
Si on veut l’équilibrer, il faut placer sur l’arbre primaire deux
masses de valeur et sur le vilebrequin quatre masses
de valeur , l’angle de calage étant 18,435o.
3.3.5.3 Conclusion
Pour l’équilibrage des masses alternatives d’ordre 1, le vilebrequinen quadrature nécessite des contrepoids un peu plus lourds que levilebrequin en croix mais il n’est pas soumis à l’ordre 2. Pourl’équilibrage des masses rotatives (§ 2.3.5.3), il permet de gagner dela masse, donc le bilan global reste en sa faveur.
Figure 26 – Moteur 3 cylindres en ligne4 temps et 2 temps : équilibrage du couplede galop d’ordre 1
Reprenons l’exemple du moteur 4 cylindres en ligne d’automobilede 2,2 L (§ 1.2). Sa masse avec accessoires et boîte de vitesses est de150 kg. On se propose de calculer le déplacement du moteur sur
l’axe .
Sans arbre d’équilibrage, restent non équilibrés les efforts de pilond’ordres 2, 4, 6, ... qui engendrent un déplacement d’amplitude maxi-male égale à :
On remarque que l’amplitude ne dépend pas du régime mais seule-ment des caractéristiques physiques du moteur. Pour diminuer cedéplacement, on peut diminuer la masse alternative, augmenter lamasse du moteur ou, plus exactement, augmenter la massesuspendue avec le moteur (en y ajoutant des éléments detransmission ou de frein) ; l’ordre de grandeur restera le même puisquel’allégement de la masse alternative est directement proportionnel àl’amplitude du déplacement, ce qui ne change pas de manièrefondamentale le problème de liaison du moteur sur son support parl’intermédiaire de cales élastiques. Pour changer les données de ceproblème, il faudrait supprimer ce déplacement ou le limiter très forte-ment (par exemple, le diviser par 100).
La manière la plus efficace de le faire est de supprimer l’effort quiengendre le mouvement.
Si l’on équilibre l’ordre 2, restent non équilibrés les efforts de pilond’ordres 4, 6, ... qui engendrent un déplacement d’amplitude maximaleégale à :
Ce très faible déplacement diminue les remontées de vibrations dumoteur vers son support, ce qui favorise l’acoustique et la tenue enendurance de la liaison moteur-support.
Y0
malt
mmoteur---------------------- R � 1
λ ----- 5
16 λ 3 --------------- 21
128 λ 5 ------------------ ...+ + + � , soit 74,1 µ m
malt
mmoteur---------------------- R � 1
16 λ 3 --------------- 3
64 λ 5 --------------- ...+ + � , soit 0,4 µ m
k p4-----=
k 14----- ,
12 ----- ,
32 -----=
2 2 am alt R θ ˙ 2 � θ π 4
----- � + cos –
2 malt /6
2 malt /12
2 10 am alt R θ ˙ 2 θ 18,435 + ( ) cos –
10 malt /6
10 malt /12
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 24 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Figure 27 – Moteur 4 cylindres en ligne 4 temps. Méthode de Lanchester
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 25

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
3.3.6 Moteur 6 cylindres en ligne 4 temps
(figure
19
)
■
Tous les couples de galop sont nuls.
■
L’effort de pilon d’ordre
p
n’est pas nul si
∀
k
entier.
●
Pour les ordres 1
,
2
,
4
, est impossible, les effortsde pilon sont nuls.
●
Pour l’ordre 6
,
k
= 2 est possible, l’effort de pilon d’ordre 6existe mais il est extrêmement faible.
Ce moteur est donc remarquablement bien équilibré.
3.4 Moteurs multicylindres en V
On note l’angle d’ouverture du V (figure
28
).
Les efforts de pilon et les couples de galop de tout ordre dus auxmasses alternatives des moteurs en ligne sont portés par
. Ils se composent pour donner des efforts de
tamis et de pilon et des couples de galop et de lacet résultants
pour le moteur en V portés par (figure
29
).
3.4.1 Étude théorique
3.4.1.1 Composition des efforts de pilon d’ordre
p
Les moteurs en ligne ont des efforts de pilon d’ordre
p
de la
forme : . Le moteur de la rangée
I
a donc un effort de
pilon de la forme et celui de la rangée
II
un
effort de pilon de la forme .
Après décomposition dans le repère fixe, et addition, le moteuren V est soumis à un effort de tamis de la forme :
et à un effort de pilon de la forme :
3.4.1.1.1 Cas général
La résultante des efforts est une ellipse de centre O de demi-axes
A
sur et
B
sur tournant à la vitesse . Elle est parfaitement
équilibrable en vertu de l’équivalence entre une ellipse et deuxcercles.
La résultante étant portée par l’ellipse :
on peut lui opposer un cercle de rayon égal à la moyenne des deuxdemi-axes :
(figure
30
a )
k p3-----=
k 13----- ,
23 ----- ,
43 -----=
δ YI , Y II ( ) = ^
YI , Y II , X I et X II
X0 et Y0
Kp pθY0cos
Kp p �θ δ2----– �cos YI
Kp p �θ δ2----+ �cos YII
A pθsin avec A 2 K p δ 2
---- sin p δ 2 ---- sin – Cte = =
B pθcos avec B 2Kpδ2----cos p δ
2----cos Cte= =
X0 Y0 p θ̇
�A pθsin
B pθcos � X0
Y0
� � A B + 2
---------------- � p θ sin –
� A B
+
2 ---------------- � p θ cos – �
X
0
Y 0
Figure 28 – Définition des repères d’un moteur en V
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 26 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
La résultante est partiellement équilibrée, il reste un efforttournant d’intensité constante de valeur :
porté par un cercle de rayon tournant en sens inverse que
l’on sait équilibrer par une masse calée en opposition ou en phaseselon la valeur de
A
et de
B
.
Dans la pratique
, il faut donc faire tourner (figure
30
b
) :
— une masse calée en opposition à la même vitesse que larésultante et dans le même sens engendrant des efforts de valeur
. Pour l’ordre 1, elle est portée par le vilebrequin et pour
l’ordre
p
, il faut créer un arbre d’équilibrage ;— une masse sur un arbre d’équilibrage calée en opposition ou
en phase à la même vitesse et en sens inverse engendrant des
efforts de valeur . Si
A
<
B
, la masse doit être calée en
opposition et si
A
>
B
elle doit être calée en phase. Pour l’ordre 1,on crée donc un arbre primaire et, pour l’ordre
p
, un second arbred’équilibrage.
Remarque :
la masse tournant avec le vilebrequin doit équilibrer les efforts sans créer
de couple ; elle sera donc placée dans le plan médian ou, plus exactement, elle
sera divisée en deux masses égales (ou quatre, ou six, etc.) que l’on placerasymétriquement par rapport au plan médian. Il doit en être de même pour les massesportées par les arbres d’équilibrage.
3.4.1.1.2 Cas particuliers
■
L’ellipse est un cercle :
cela se produit si |
A
| = |
B
|. La résultante
est un cercle de centre O de rayon
A
tournant à la vitesse ; celarevient à une masse rotative qui engendre des efforts de coefficientségaux comme, par exemple, les masses rotatives d’un moteur 2cylindres en ligne 4 temps. On peut l’équilibrer parfaitement en
plaçant une masse sur un arbre tournant à la même vitesse etdans le même sens, calée en opposition.
Pour l’ordre 1, l’ellipse est un cercle si , donc
pour
δ
= 90
o
. Dans ce cas, étant donné que l’arbre tourne dans lemême sens que le vilebrequin et à la même vitesse, on peutreporter la masse attachée à cet arbre sur le vilebrequin.
Ainsi, si le V est ouvert à 90
o
, il n’y a pas besoin d’arbre primairepour équilibrer les efforts d’ordre 1.
■
L’ellipse est une droite :
cela se produit si
A
= 0 ou
B
= 0.
●
Cas 1 :
A
= 0. L’ellipse est une droite sur ; l’effort de tamis
d’ordre
p
est nul ; la résultante est égale à l’effort de pilon d’ordre
p
équilibrable selon la théorie de l’équivalence entre une massealternative et deux masses rotatives.
●
Cas 2 :
B
= 0. L’ellipse est une droite sur ; l’effort de pilon
d’ordre
p
est nul ; la résultante est égale à l’effort de tamis d’ordre
p
équilibrable de la même manière.
3.4.1.2 Composition des couples de galop d’ordre
p
Les moteurs en ligne ont des couples de galop d’ordre
p
de la
forme . Le moteur de la rangée
I
a donc un couple de galop de la forme
et celui de la rangée
II
un couple de la forme :
Après décomposition dans le repère fixe, et addition, le moteuren V est soumis à un couple de galop de la forme :
et à un couple de lacet de la forme :
3.4.1.2.1 Cas général
Le couple résultant est une ellipse de centre O de demi-axes
C
sur et
D
sur tournant à la vitesse . Il est parfaitement
équilibrable en vertu de l’équivalence entre une ellipse et deuxcercles.
Le couple résultant étant porté par l’ellipse :
on peut lui opposer un cercle de rayon égal à la moyenne desdemi-axes :
(figure
31
a
)
Le couple résultant est partiellement équilibré, il reste un coupletournant d’intensité constante de valeur :
porté par un cercle de rayon tournant en sens inverse que
l’on sait équilibrer par deux masses symétriques par rapport aupoint central d’un arbre décalé de
β
, calé en opposition ou enphase selon la valeur de
C
et de
D
.
Figure 29 – Moteur en V : composition des efforts de pilonet des couples de galop
�+ � A B
– 2
---------------- � p θ sin
� A B
–
2 ---------------- � p θ cos – �
X
0
Y 0
A B–2
----------------
pθ̇
A B+2
----------------
A B–2
----------------
X 0, Y 0 ( )
p θ̇
pθ̇
sin2 δ2---- cos2 δ
2----=
Y0
X0
K ′ p p θ β + ( ) X 0 cos avec K ′ p 0 > –
– K ′ p � p � θ δ
2 ---- � – β � X I + cos
– K ′ p � p � θ δ 2
---- � + β � X II + cos
C p θ β + ( ) cos avec C – 2 K ′ p δ 2
---- cos p δ 2 ---- cos Cte = =
D p θ β + ( ) sin avec D – 2 K ′ p δ
2 ---- sin p δ
2 ---- sin Cte = =
X0 Y0 pθ̇
� C – p θ β + ( ) cos
D – p θ β + ( ) sin �
X
0
Y 0
�� C D+2
----------------� pθ β+( )cos
� C D+2
----------------� pθ β+( )sin � X0
Y0
� � C D
– 2 ---------------- � p θ β + ( ) cos –
+ � C D
–
2 ---------------- � p θ β + ( ) sin �
X
0
Y 0
C D–2
----------------
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 27

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Dans la pratique
, il faut donc faire tourner (figure
31
b
) :— deux masses calées en opposition décalées de
β
, symétriques
par rapport au point O, à la même vitesse que le couplerésultant et dans le même sens, engendrant des couples de valeur
. Pour l’ordre 1, elles sont portées par le vilebrequin et pour
l’ordre
p
, il faut créer un arbre d’équilibrage ;— un arbre d’équilibrage calé en opposition ou en phase décalé
de
β
, portant deux masses symétriques par rapport au pointcentral, tournant en sens inverse et engendrant des couples de
valeurs .
Si
C
<
D
, l’arbre d’équilibrage doit être calé en phase et si
C
>
Dil doit être calé en opposition. Pour l’ordre 1, on crée donc un arbreprimaire et, pour l’ordre p, un second arbre d’équilibrage.
3.4.1.2.2 Cas particuliers
■ L’ellipse est un cercle : cela se produit si |C | = |D |. Le couplerésultant est un cercle de centre O de rayon C tournant à la vitesse
; cela revient à une masse rotative qui engendre des couples decoefficients égaux comme, par exemple, les masses rotatives d’unmoteur 2 cylindres en ligne 2 temps. On peut l’équilibrer parfai-tement en plaçant deux masses symétriques par rapport au point
central O, décalées de β, sur un arbre tournant à la même vitesse dans le même sens, calées en opposition.
De même que pour la composition des efforts (§ 3.4.1.1), pourl’ordre 1, l’ellipse est un cercle si le V est ouvert à 90o. Dans ce cas,il n’y a pas besoin d’arbre primaire pour équilibrer les couplesd’ordre 1.
Figure 30 – Moteur en V : composition des efforts de pilon d’ordre p (figure tracée pour l’ordre 1)
pθ̇
C D+2
----------------
C D–2
----------------
pθ̇
pθ̇
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 28 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
■ L’ellipse est une droite : cela se produit si C = 0 ou D = 0.● Cas 1 : C = 0. L’ellipse est une droite sur ; le couple de galop
d’ordre p est nul ; le couple résultant est égal au couple de lacetd’ordre p équilibrable selon la théorie de l’équivalence entre uncouple alternatif et quatre masses rotatives.
● Cas 2 : D = 0. L’ellipse est une droite sur ; le couple de lacet
d’ordre p est nul ; le couple résultant est égal au couple de galopd’ordre p équilibrable de la même manière.
3.4.2 Moteur 2 cylindres en V
Il n’est soumis à aucun couple, mais aux efforts de tamis et depilon de tout ordre. Pour l’ordre 1, ils valent :
Si le V est ouvert à 90o, on se trouve dans le cas particulier
où l’ellipse est un cercle ; les efforts valent
et sont parfaitement équilibrables par deux
contrepoids de valeur malt /2 placés dans le prolongement des brasde maneton.
Si le V est ouvert à une autre valeur, il faut un arbre d’équilibrage.
Figure 31 – Moteur en V : composition des couples de galop d’ordre p (figure tracée pour l’ordre 1 et )� 30o=
Y0
X0 2 m alt R θ ˙ 2 sin 2 δ
2 ----– θ sin et 2 m alt R θ ˙ 2 cos 2 δ
2 ---- θ cos
m alt R θ ˙ 2 θ sin –
et maltR θ̇ 2 θcos
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 29

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
3.4.3 Moteur 4 cylindres en V
Si on utilise le vilebrequin du 2 cylindres en ligne 2 temps(figure 10), le moteur n’est soumis qu’aux efforts d’ordres 2, 4,6, ... que l’on n’équilibre pas, et aux couples de galop et de lacetd’ordre 1 qui valent :
Si le V est ouvert à 90o, on se trouve dans le cas particulier oùl’ellipse est un cercle ; les couples valent :
et sont parfaitement équilibrables par deux contrepoids de valeur2 malt / 3 placés dans le prolongement des bras de manetonsextrêmes.
Si le V est ouvert à un autre angle, il faut un arbre d’équilibrage.
3.4.4 Moteur 6 cylindres en V
Il n’est soumis qu’aux efforts d’ordre 6, et aux couples d’ordres1, 2 et 4. On n’équilibre que les couples d’ordre 1 qui valent :
et
Nous allons traiter trois cas d’angle d’ouverture du V.
3.4.4.1 V ouvert à 120o
Dans cette configuration, le couple moteur instantané pour un 4temps est parfaitement régulier. Les couples valent :
et
On est dans le cas général.
Pour les équilibrer, on utilise sur le vilebrequin quatre contrepoidségaux placés dans les plans extrêmes, calés en opposition à 30o etsymétriques deux à deux par rapport au point O. Ces quatre
contrepoids devant engendrer des couples de valeur ,
ils valent chacun . On a alors équilibré trop de galop et
pas assez de lacet ; il reste un couple de galop d’ordre 1 de valeur :
et un couple de lacet d’ordre 1 de valeur :
que l’on équilibre par un arbre primaire tournant en sens inverse
portant deux contrepoids de valeur , calés à 30o, placés
à la distance 2a du point central de l’arbre, symétriques par rapportà celui-ci. L’arbre d’équilibrage doit être calé en phase car C < D(figure 32a ).
3.4.4.2 V ouvert à 60o
Les couples valent :
et
On est également dans le cas général.
On place sur le vilebrequin les mêmes contrepoids aux mêmespositions que pour le V ouvert à 120o. On a alors équilibré pasassez de galop et trop de lacet ; il reste un couple de galop d’ordre1 de valeur :
et un couple de lacet d’ordre 1 de valeur :
que l’on équilibre par le même arbre primaire que pour le V ouvertà 120o, sauf qu’il doit être calé en opposition car C > D (figure 32b ).
3.4.4.3 V ouvert à 90o
On se trouve dans le cas particulier où l’ellipse est un cercle. Lescouples valent :
et
Pour les équilibrer, il n’y a pas besoin d’arbre primaire, il suffitde placer sur le vilebrequin les mêmes contrepoids aux mêmespositions que pour les V ouverts à 120o ou 60o (figure 32c ).
Pour le moteur V6, on choisira donc souvent l’angle de 90o pourlequel les couples d’ordre 1 s’équilibrent sans arbre primaire et lecouple de galop d’ordre 2 est nul. Cependant, si le vilebrequin està manetons non décalés (figure 33a ), l’intervalle entre deuxallumages est irrégulier ; il est de 90o et 150o. Si on tient à la régularitéd’allumage, on peut décaler les manetons de 30o (figure 33b ), maisau point de vue de l’équilibrage, on se retrouve dans le cas du Vouvert à 120o : l’arbre primaire est nécessaire (figure 34).
3.4.5 Moteur 8 cylindres en V
■ Vilebrequin à plat (figure 14)
Il n’est pas soumis aux couples ni aux efforts d’ordre 1, maisuniquement aux efforts d’ordres 2, 4, 6, ... C’est le plus utilisé.
■ Vilebrequin en croix (figure 17)
Il n’est soumis qu’aux efforts d’ordre 4, et aux couples d’ordres1, 2, et 6. On n’équilibre que les couples d’ordre 1 qui valent :
et
Si le V est ouvert à 90o, on se trouve dans le cas particulier oùl’ellipse est un cercle ; les couples valent :
4 am alt R θ ˙ 2 cos 2 δ 2
---- θ cos – et 4 am alt R θ ˙ 2 sin 2 δ 2
----– θ sin
2 am alt R θ ˙ 2 θ cos et 2 am alt R θ ˙ 2 θ sin ––
4 3 am alt R θ ˙ 2 cos 2 δ 2
---- � θ π 6
----- � + cos –
4 3 am alt R θ ˙ 2 sin 2 δ 2
---- � θ π 6
----- � + sin –
3 – am alt R θ ˙ 2 � θ π 6
----- � + cos
3 3 – am alt R θ ˙ 2 � θ π 6
----- � + sin
2 3 amaltR θ̇ 2
3 malt 4⁄
3 amaltR θ̇ 2 �θ π6-----�+cos
3 – am alt R θ ˙ 2 � θ π 6
----- � + sin
3 malt 4⁄
3 3 am alt R θ ˙ 2 � θ π 6
----- � + cos –
3 am alt R θ ˙ 2 � θ π 6
----- � + sin –
3 am alt R θ ˙ 2 � θ π 6
----- � + cos –
3 amaltR θ̇ 2 �θ π6-----�+sin
2 3 am alt R θ ˙ 2 � θ π 6
----- � + cos –
2 3 am alt R θ ˙ 2 � θ π
6
----- � + sin –
4 2 am alt R θ ˙ 2 cos 2 δ 2
---- � θ π 4
----- � + cos –
4 2 am alt R θ ˙ 2 sin 2 δ
2 ---- � θ π 4 ----- � + sin –
2 2 am alt R θ ˙ 2 � θ π 4
----- � + cos –
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 30 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
et
et sont parfaitement équilibrables par quatre contrepoids de valeur
placés dans les plans extrêmes, calés en opposition,
décalés de 45 o et symétriques deux à deux par rapport au point O(figure
35
a
).
■
Vilebrequin en quadrature
(figure
18
)
Il est soumis aux mêmes efforts que le vilebrequin en croix, maisseulement aux couples d’ordre 1 qui valent :
et
Figure 32 – Moteur 6 cylindres en V : équilibrage des couples d’ordre 1
2 2 am alt R θ ˙ 2 � θ π
4
----- � + sin –
2 malt 6⁄ 4 10 am alt R θ ˙ 2 cos 2 δ
2 ---- θ 18,435 + ( ) cos –
4 10 am alt R θ ˙ 2 sin 2 δ
2 ---- θ 18,435 + ( ) sin –
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 31

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Si le V est ouvert à 90
o
, on se trouve dans le cas particulier oùl’ellipse est un cercle ; les couples valent :
et
et sont parfaitement équilibrables par quatre contrepoids de valeur
placés dans les plans extrêmes, calés en opposition,
décalés de 18,435
o
et symétriques deux à deux par rapport aupoint O (figure
35
b
).
Figure 33 – Moteur V6 PRV à 90
o
:vilebrequin à manetons décalés ou non
Il est à remarquer que, pour le V8, l’angle d’ouverture du V de90
o
pour lequel l’équilibrage ne nécessite pas d’arbre primaireest aussi celui qui assure la meilleure régularité d’allumage.
Figure 34 – Moteur V6 PRV à 90
o
avec un vilebrequinà manetons décalés : système d’équilibrage
2 10 am alt R θ ˙ 2 θ 18,435 + ( ) cos –
2 10 am alt R θ ˙ 2 θ 18,435 + ( ) sin –
10 malt 6⁄
Figure 35 – Moteur 8 cylindres en V à 90
o
: équilibrage des couples d’ordre 1
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 32 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
3.4.6 Moteur 12 cylindres en V
Il n’est pas soumis aux couples mais uniquement aux effortsd’ordre 6 ; il est donc remarquablement bien équilibré.
3.5 Autres types de moteur
■
Moteur 2 cylindres à plat
Les deux pistons ayant des mouvements symétriques, l’effort depilon d’un piston annule à tout moment celui de l’autre piston. Parcontre, le moteur est soumis aux couples de galop de tout ordre.Si l’on veut équilibrer l’ordre 1, on applique la méthode du 2cylindres en ligne 2 temps (figure
10
).
■
Moteur 4 cylindres à plat
Ce moteur est une succession de 2 moteurs 2 cylindres à plat.Les efforts et le couple de galop d’ordre 1 sont nuls. Il n’est soumisqu’aux couples de galop d’ordre 2, 4 et 6. Ce moteur est bienéquilibré.
4. Tableaux récapitulatifsdes valeurs des effortset des couples
Dans les tableaux
4
,
5
,
6
, 7
et
8
sont indiquées les valeurs desefforts et des couples jusqu’à l’ordre 6.
Nota :
Dans l’écriture des facteurs constants fonction de il n’est indiqué que le
premier terme de la série en 1/
λ
.
— Pour retrouver la valeur des efforts de tamis et de pilon, il faut multiplier les
grandeurs dans les tableaux par .
— Pour retrouver la valeur des couples de galop et de lacet, il faut multiplier les
grandeurs dans les tableaux par .
(0)
(0)
(0)
(0)
1λ---- , 1
λ3----- , 1
λ5----- , ...
Rθ̇2
a R θ ˙ 2
–
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 33

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Tableau 4 – Moteurs en ligne : valeur des efforts et des couples
Efforts Tamis
(1)
Pilon
(1)
Ordre 1 Ordre 2 Ordre 4 Ordre 6
1 cylindre
–
m
rot
sin
θ
(
m
rot
+
m
alt
) cos
θ
2 Cylindres
4 temps
–
2
m
rot
sin
θ
2 (
m
rot
+
m
alt
) cos
θ
2 temps 0 0
3 cylindres 0 0 0 0
4 cylindres4 temps 0 0
2 tempsvilebrequin en croix 0 0 0 0
2 tempsvilebrequin en quadrature 0 0 0 0
6 cylindres4 temps 0 0 0 0
Couples Galop (2) Lacet (2)Ordre 1 Ordre 2 Ordre 4 Ordre 6
1 cylindre 0 0 0 0 0
2 cylindres4 temps 0 0 0 0 0
2 temps 2 (m rot + malt) cosθ 0 0 0 2m rot sinθ
3 cylindres 0
4 cylindres4 temps 0 0 0 0 0
2 tempsvilebrequin en croix 0
2 tempsvilebrequin en quadrature 0 0 0
6 cylindres4 temps 0 0 0 0 0
(1) Pour retrouver la valeur des efforts de tamis et de pilon, il faut multiplier les grandeurs dans le tableau par .
(2) De même, pour les couples de galop et de lacet, il faut multiplier les grandeurs par .
1λ----- m alt 2 θ cos 1
4
λ
3 ----------– m alt 4 θ cos 9
128λ5--------------- m alt 6 θ cos
2λ----- m alt 2 θ cos 1
2
λ
3 ----------– m alt 4 θ cos 9
64λ5------------- m alt 6 θ cos
2λ----- m alt 2 θ cos 1
2
λ
3 ----------– m alt 4 θ cos 9
64λ5------------- m alt 6 θ cos
27128λ5--------------- m alt 6 θ cos
4λ----- m alt 2 θ cos
1 λ 3 -------– m alt 4 θ cos 9
32λ5------------- m alt 6 θ cos
1 λ 3 -------– m alt 4 θ cos
1 λ 3 -------– m alt 4 θ cos
2764λ5------------- m alt 6 θ cos
2 3 mrot malt+( ) �θ π6-----�+cos 2 3
λ------------ m alt � 2 θ π
6 -----– � cos 3
2
λ 3 ----------– m alt � 4 θ π
6 -----+ � cos 2 3 mrot �θ π
6-----�+sin
2 2 mrot malt+( ) �θ π4-----�+cos
8λ----- m alt 2 θ cos
916λ5------------- m alt 6 θ cos 2 2 mrot �θ π
4-----�+sin
2 10 mrot malt+( ) θ 18,435+( )cos 2 10 mrot θ 18,435+( )sin
Rθ̇ 2
aR θ ˙ 2 –
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 34 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Tableau 5 – Moteurs en V : valeur des efforts de tamis
EffortsTamis
(1)
Ordre 1 Ordre 2 Ordre 4 Ordre 6
2 cylindres
δ
90 – (
M
rot
+
m
alt
) sin
θ
0
4 cylindres
vilebrequinen
opposition
δ
0
90 0 0
180 0 0 0 0
6 cylindres
δ
0 0 0
60 0 0 0 0
90 0 0 0
120 0 0 0 0
8 cy
lindr
es
vilebrequinà
plat
δ
0
90 0 0
vilebrequinen
croix
δ
0 0 0
90 0 0 0 0
vilebrequinen
quadrature
δ
0 0 0
90 0 0 0 0
12 cylindres
δ
0 0 0
60 0 0 0 0
(1) Pour retrouver la valeur des efforts de tamis, il faut multiplier les grandeurs du tableau par .
� M rot 2 m alt sin 2 δ 2 ----+ � θ sin – 2 λ
----- m alt δ 2
---- sin δ sin 2 θ sin –1
2λ3---------- m alt δ
2 ---- sin 2 δ sin 4 θ sin 9
64
λ
5 ------------- m alt δ
2 ---- sin 3 δ sin 6 θ sin –
2 λ --------- m alt 2 θ sin –
9 2128λ5--------------- m alt 6 θ sin
4 λ -----– m alt δ
2 ---- sin δ sin 2 θ sin
1λ3------- m alt δ 2 ---- sin 2 δ sin 4 θ sin 9
32
λ 5 ------------- m alt δ 2 ---- sin 3 δ sin 6 θ sin –
2 2 λ
----------- m alt 2 θ sin –9 264λ5------------- m alt 6 θ sin
2764
λ
5 ------------- m alt δ
2 ---- sin 3 δ sin 6 θ sin –
27 2128λ5--------------- m alt 6 θ sin
8 λ -----– m alt δ
2 ---- sin δ sin 2 θ sin2λ3------- m alt δ
2 ---- sin 2 δ sin 4 θ sin 9
16
λ
5 -------------– m alt δ
2 ---- sin 3 δ sin 6 θ sin
4 2 λ ------------ m alt 2 θ sin –9 232λ5------------- m alt 6 θ sin
2λ3------- m alt δ
2 ---- sin 2 δ sin 4 θ sin
2λ3------- m alt δ
2 ---- sin 2 δ sin 4 θ sin
2732
λ
5 ------------- m alt δ
2 ---- sin 3 δ sin 6 θ sin –
Rθ̇ 2
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 35

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
Tableau 6 – Moteurs en V : valeur des efforts de pilon
EffortsPilon (1)
Ordre 1 Ordre 2 Ordre 4 Ordre 6
2 cylindres
δ
90 (Mrot + malt) cosθ 0 0
4 cylindresvilebrequin
enopposition
δ 0
90 0 0 0
180 0 0 0 0
6 cylindres
δ 0 0 0
60 0 0 0
90 0 0 0 0
120 0 0 0
8 cy
lindr
es
vilebrequinà
plat
δ 0
90 0 0 0
vilebrequinen
croix
δ 0 0 0
90 0 0 0
vilebrequinen
quadrature
δ 0 0 0
90 0 0 0
12 cylindres
δ 0 0 0
60 0 0 0
(1) Pour retrouver la valeur des efforts de pilon, il faut multiplier les grandeurs du tableau par .
�Mrot 2malt cos2 δ2----+ � θcos 2
λ----- m alt δ
2 ---- cos δ cos 2 θ cos 12
λ
3 ----------– m alt δ
2 ---- cos 2 δ cos 4 θ cos 9
64λ5------------- m alt δ
2 ---- cos 3 δ cos 6 θ cos
24λ3---------- m alt 4 θ cos
4λ----- m alt δ
2 ---- cos δ cos 2 θ cos 1
λ 3 -------– m alt δ
2 ---- cos 2 δ cos 4 θ cos 9
32λ5------------- m alt δ
2 ---- cos 3 δ cos 6 θ cos
22λ3---------- m alt 4 θ cos
2764λ5------------- m alt δ
2 ---- cos 3 δ cos 6 θ cos
27 3128
λ 5 ---------------- m alt 6 θ cos –
27128λ5--------------- m alt 6 θ cos
8λ----- m alt δ
2 ---- cos δ cos 2 θ cos 2
λ
3 -------– m alt δ
2 ---- cos 2 δ cos 4 θ cos 9
16λ5------------- m alt δ
2 ---- cos 3 δ cos 6 θ cos
2λ3-------- m alt 4 θ cos
2 λ 3 -------– m alt δ
2 ---- cos 2 δ cos 4 θ cos
2λ3------- m alt 4 θ cos
2 λ 3 -------– m alt δ
2 ---- cos 2 δ cos 4 θ cos
2λ3------- m alt 4 θ cos
2732λ5------------- m alt δ
2 ---- cos 3 δ cos 6 θ cos
27 364
λ
5 -------------– m alt 6 θ cos
Rθ̇ 2
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 36 © Techniques de l’Ingénieur, traité Génie mécanique

______________________________________________________________________________________________ ÉQUILIBRAGE DES MACHINES ALTERNATIVES
Tableau 7 – Moteurs en V : valeur des couples de galop et de lacet
Couples
(1)
Galop
(2)
Ordre 1 Ordre 2 Ordre 4 Ordre 6
4 cylindres
vilebrequinen
opposition
δ
0 0 0
90 2 (
M
rot
+
m
alt
) cos
θ
0 0 0
180 2
M
rot
cos
θ
0 0 0
6 cylindres
δ
0
60 0
90 0 0
120 0
8 cy
lindr
es
vilebrequinà
plat
δ
0 0 0 0
90 0 0 0 0
vilebrequinen
croix
δ
0
90 0 0 0
vilebrequinen
quadrature
δ
0 0 0
90 0 0 0
Couples
(1)
Lacet
(2)
Ordre 1 Ordre 2 Ordre 4 Ordre 6
4 cylindres
vilebrequinen
opposition
δ
0 0 0
90 2 (
M
rot
+
m
alt
) sin
θ
0 0 0
180 2 (
M
rot
+ 2
m
alt
) sin
θ
0 0 0
6 cylindres
δ
0
60 0
90 0 0
120 0
(1)
Les couples de galop et de lacet pour les moteurs 2 cylindres et 12 cylindres sont nuls à tous les ordres 1, 2, 4 et 6, ils ne sont donc pas indiqués ici.
(2) Pour retrouver la valeur des couples de galop et de lacet, il faut multiplier les grandeurs du tableau par .
2 �M rot 2malt cos2 δ2----+ � θcos
2 3 �M rot 2malt cos2 δ2----+ � �θ π
6-----+ �cos 4 3
λ------------ m alt δ
2 ---- cos δ cos � 2 θ π
6 -----– � cos
3 λ
3 --------- – m alt δ
2 ---- cos 2 δ cos
�
4
θ
π
6
-----+
�
cos
3 �2Mrot 3malt+ � �θ π6-----+ �cos 3
λ----- m alt � 2 θ π 6 -----– � cos
3
4λ3----------- m alt � 4 θ π
6 -----+ � cos
2 3 �M rot malt+ � �θ π6-----+ �cos 6
2λ3----------- m alt � 4 θ π
6 -----+ � cos
3 �2Mrot malt+ � �θ π6-----+ �cos – 3 λ
------- m alt � 2 θ π 6
-----– � cos3
4λ3----------- m alt � 4 θ π
6 -----+ � cos
2 2 �M rot 2malt cos2 δ2----+ � �θ π
4-----+ �cos 16
λ------- m alt δ
2 ---- cos δ cos 2 θ cos 9
8λ5---------- m alt δ
2 ---- cos 3 δ cos 6 θ cos
2 2 �M rot malt+ � �θ π4-----+ �cos
2 10 �M rot 2malt cos2 δ2----+ � θ 18,435+( )cos
2 10 �M rot malt+ � θ 18,435+( )cos
2 �Mrot 2maltsin2 δ2----+ � θsin
2 3 �Mrot maltsin2 δ2----+ � �θ π
6-----+ �sin 4 3
λ------------ m alt δ
2 ---- sin δ sin � 2 θ π 6 -----– � sin
3 λ
3 ---------– m alt δ
2 ---- sin 2 δ sin
�
4
θ
π
6
-----+
�
sin
3 �2Mrot malt+ � �θ π6-----+ �sin 3
λ----- m alt � 2 θ π
6 -----– � sin 3
4
λ
3 ----------– m alt � 4 θ π
6 -----+ � sin
2 3 �Mrot malt+ � �θ π6-----+ �sin 2 6
λ------------ m alt � 2 θ π
6 -----– � sin
3 �2Mrot 3malt+ � �θ π6-----+ �sin 3 3
λ------------ m alt � 2 θ π 6 -----– � sin 3 3
4λ3------------ m alt � 4 θ π 6 -----+ � sin
aR θ ˙ 2 –
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.© Techniques de l’Ingénieur, traité Génie mécanique B 2 770 − 37

ÉQUILIBRAGE DES MACHINES ALTERNATIVES _______________________________________________________________________________________________
(0)
5. Conclusion
Il est impératif d’équilibrer les forces d’inertie des moteurs alter-natifs afin de ne pas transmettre au support de trop grands efforts,engendrant des mouvements de grande amplitude.
L’équilibrage peut être réalisé par un choix judicieux du nombreet de la disposition des cylindres et de la forme du vilebrequin, oupar des contrepoids placés sur le vilebrequin ou sur des arbresd’équilibrage.
L’équilibrage est donc un paramètre important dans la décisiondu choix de l’architecture moteur.
Quelle que soit la manière de réaliser l’équilibrage, il faut aussise préoccuper des efforts internes sur les paliers de ligne d’arbreafin d’assurer une bonne tenue en endurance du bas moteur.
Les contrepoids choisis étant en place, le moteur n’est jamaisparfaitement équilibré. Il reste les forces d’inertie que l’on a décidéde ne pas équilibrer et les forces dues aux gaz qui sortent dumoteur, que l’on n’équilibre pas (par exemple, le couple moteurdont la réaction s’applique sur le support). Les théorèmes de ladynamique permettent de connaître les mouvements résiduels dumoteur, ce qui est le point de départ de la définition de la liaisonmoteur-support qui peut être rigide ou assurée par l’intermédiairede cales élastiques.
Couples (1) Lacet (2)Ordre 1 Ordre 2 Ordre 4 Ordre 6
8 cy
lindr
es
vilebrequinà
plat
δ 0 0 0 0
90 0 0 0 0
vilebrequinen
croix
δ 0
90 0
vilebrequinen
quadrature
δ 0 0 0
90 0 0 0
Tableau 7 – Moteurs en V : valeur des couples de galop et de lacet (suite)
(1) Les couples de galop et de lacet pour les moteurs 2 cylindres et 12 cylindres sont nuls à tous les ordres 1, 2, 4 et 6, ils ne sont donc pas indiqués ici.
(2) Pour retrouver la valeur des couples de galop et de lacet, il faut multiplier les grandeurs du tableau par . aR θ ˙ 2 –
2 2 �Mrot 2maltsin2 δ2----+ � �θ π
4-----+ �sin 16
λ------- m alt δ
2 ---- sin δ sin 2 θ sin
98λ5---------- m alt δ
2 ---- sin 3 δ sin 6 θ sin
2 2 �Mrot malt+ � �θ π4-----+ �sin 8 2
λ------------ m alt 2 θ sin 9 2
16
λ 5 --------------– m alt 6 θ sin
2 10 �Mrot 2maltsin2 δ2----+ � θ 18,435+( )sin
2 10 �Mrot malt+ � θ 18,435+( )sin
Tableau 8 – Moteurs à plat : valeur des efforts et des couples
Efforts TamisPilon
Ordre 1 Ordre 2 Ordre 4 Ordre 6
2 cylindres 0 0 0 0 0
4 cylindres 0 0 0 0 0
CouplesGalop (1)
Lacet (1)Ordre 1 Ordre 2 Ordre 4 Ordre 6
2 cylindres 2(mrot + malt)cosθ 2mrot sinθ
4 cylindres 0 0
(1) Pour retrouver la valeur des couples de galop et de lacet, il faut multiplier les grandeurs du tableau par .
2λ----- m alt 2 θ cos 1
2
λ
3 -----------– m alt 4 θ cos 9
64λ5--------------- m alt 6 θ cos
4λ----- m alt 2 θ cos 1
λ 3 --------– m alt 4 θ cos 9
32λ5--------------- m alt 6 θ cos
aR θ ˙ 2 –
Références bibliographiques
[1] BRUN (R.). – Science et technique du moteurDiesel industriel et de transport. Tome II,488 p., 4e éd., Technip (1984).
[2] SWOBODA (B.). – Mécanique des moteursalternatifs. 335 p., Technip (1984).
[3] NAKAMURA (H.). – (Un moteur à faiblevibration grâce à un système inédit d’arbresd’équilibrage) (J) SAE, no 760 111, 23-27 fév.1976.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.B 2 770 − 38 © Techniques de l’Ingénieur, traité Génie mécanique