Embed Size (px)
Citation preview

__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
1
Les applications pédagogiques
Rachid MESRAR
APPLICATIONS PEDAGOGIQUES-2
*** CINEMATIQUE DU
SOLIDE
__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
2
Application pédagogique n° Application pédagogique n° Application pédagogique n° Application pédagogique n° 1111 : mouvement d’une demi : mouvement d’une demi : mouvement d’une demi : mouvement d’une demi----boule en contact avec un plan fixeboule en contact avec un plan fixeboule en contact avec un plan fixeboule en contact avec un plan fixe Notions abordéesNotions abordéesNotions abordéesNotions abordées ::::
Paramétrage d'un solideParamétrage d'un solideParamétrage d'un solideParamétrage d'un solide
Torseur cinématiqueTorseur cinématiqueTorseur cinématiqueTorseur cinématique
Axe instantané de rotation et de glissement (AIRG)Axe instantané de rotation et de glissement (AIRG)Axe instantané de rotation et de glissement (AIRG)Axe instantané de rotation et de glissement (AIRG)
Invariant scalaire Invariant scalaire Invariant scalaire Invariant scalaire –––– Invariant vectoriel Invariant vectoriel Invariant vectoriel Invariant vectoriel
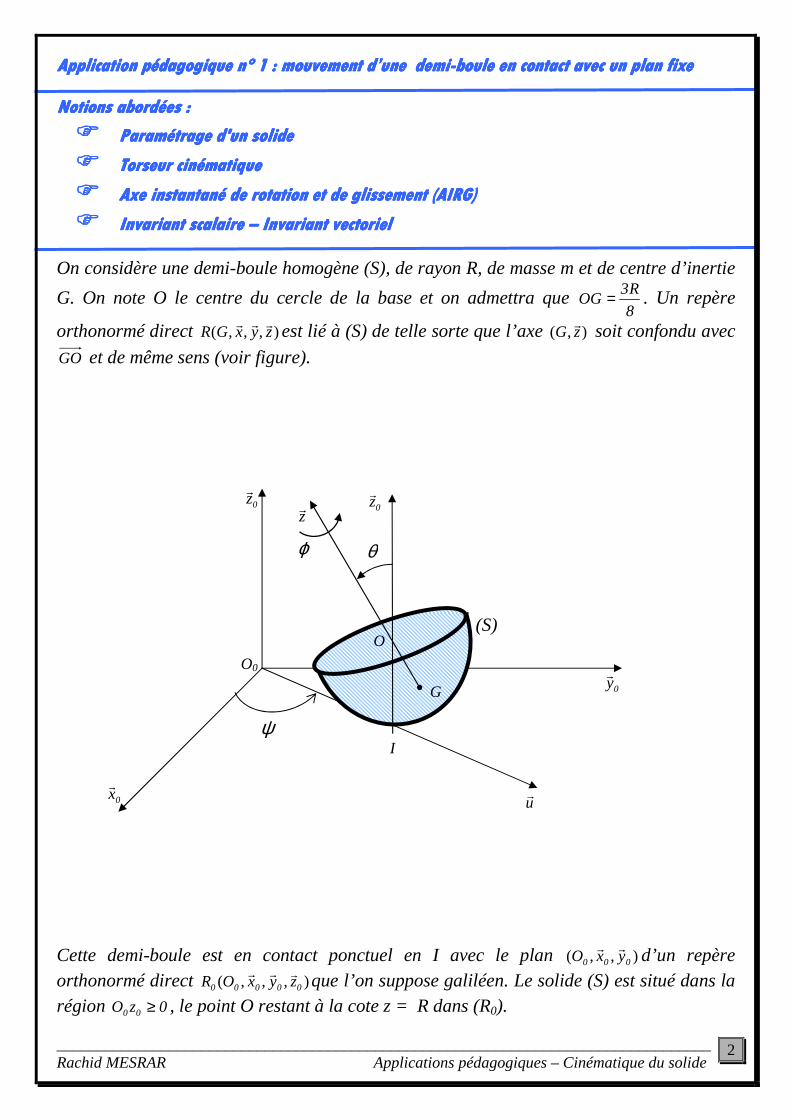
On considère une demi-boule homogène (S), de rayon R, de masse m et de centre d’inertie
G. On note O le centre du cercle de la base et on admettra que 8
R3OG = . Un repère
orthonormé direct ),,,( zyxGRrrr est lié à (S) de telle sorte que l’axe ),( zG
r soit confondu avec
GO et de même sens (voir figure).
Cette demi-boule est en contact ponctuel en I avec le plan ),,( 000 yxO
rr d’un repère orthonormé direct ),,,( 00000 zyxOR
rrr que l’on suppose galiléen. Le solide (S) est situé dans la région 0zO 00 ≥ , le point O restant à la cote z = R dans (R0).
(S)
ϕ
ur
0zr
zr
0zr
0yr
θ
ψ I
O0 G
0xr
O

__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
3
Q1- Paramétrer la position de la demi-boule en utilisant les angles d’Euler. Q2- Construire les figures de calcul. Q3- Déterminer le vecteur instantané de rotation de (S) dans son mouvement par rapport à (R0) et donner ses composantes dans la base ),,( zwu
rrr . Q4- Déterminer la condition géométrique de contact entre (S) et le plan ),,( 00 yxO
rr .
Q5- Quel est alors le nombre de degrés de liberté du système ? Q6- Calculer la vitesse du centre d’inertie G de (S) par ses composantes dans la base ),,( zwu
rrr . Q7- Calculer l’accélération du centre d’inertie G de (S) par ses composantes dans la base ),,( zwu
rrr .

__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
4
Solution détailléeSolution détailléeSolution détailléeSolution détaillée R1- La position de (S) peut être définie par les coordonnées (x, y, z) de G dans (R0) et par les angles d’Euler ),,( ϕθψ déterminés par la succession des repères orthonormés directs suivants :
),,,(),,,(),,,(),,,(' ),(),(),( zyxGRzwuGRzvuGRzyxGR z2
u01
z000
0rrrrrrrrrrrr rrr
→ → → ϕθψ (R’) a ses axes respectivement parallèles à ceux de (R0) et de même sens. R2-
xr
yr
zr
zr
R3- Le vecteur instantané de rotation de (S) dans son mouvement par rapport à (R0) est donné par :
00112200 zuzRRRRRRRRRSr
&r&r
&rrrrr
ψθϕΩΩΩΩΩ ++=++== )/()/()/()/()/(
Avec ),,,( 01 zvuGR
rrr le premier repère intermédiaire et ),,,( zwuGR2
rrrest le deuxième
repère intermédiaire. Soit :
zuzRS 00
r&
r&r&
rϕθψΩ ++=)/(
Ou encore dans la base ),,( zwu
rrr :
zwuRS 0
r&&
r&
r&r
)cos(sin)/( θψϕθψθΩ +++=

__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
5
R4- Le contact géométrique en I est nécessairement traduit par une condition sur les paramètres de position ),,,,,( ϕθψzyx . Celle-ci est obtenue en exprimant que si le contact a lieu alors :
0zIO 00 =r.
0zOIGOGO 00 =++⇒r
).(
0zzRz8
R3zzyyxx 00000 =−+++⇒
rrrrr).(
D’où :
R5- La condition (Lg) obtenue dans la question 4- permet de réduire le nombre de paramètres de position indépendants de 6 à 5.
Le nombre de degrés de liberté du système est alors 5 qui sont ),,,,( ϕθψyx . R6-
000
R
00 z
8
R3yyxx
dt
GOdRGV
0
r&r&
r&
rθθ sin)/( ++=
=
)cos(sinsin
)sincoscoscos(sin)sinsincossin(cos
zw8
R3
zwuyzwux
rr&
rrr&
rrr&
θθθθ
θψθψψθψθψψ
++
−+++−=
D’où :
+−
++−
+
=
θθθθψθψ
θθθψθψ
ψψ
cossinsincossinsin
sincoscoscossin
sincos
)/(
),,(
&&&
&&&
&&
r
rrr 8
R3yx
8
R3yx
yx
RGV 2
zwu
0
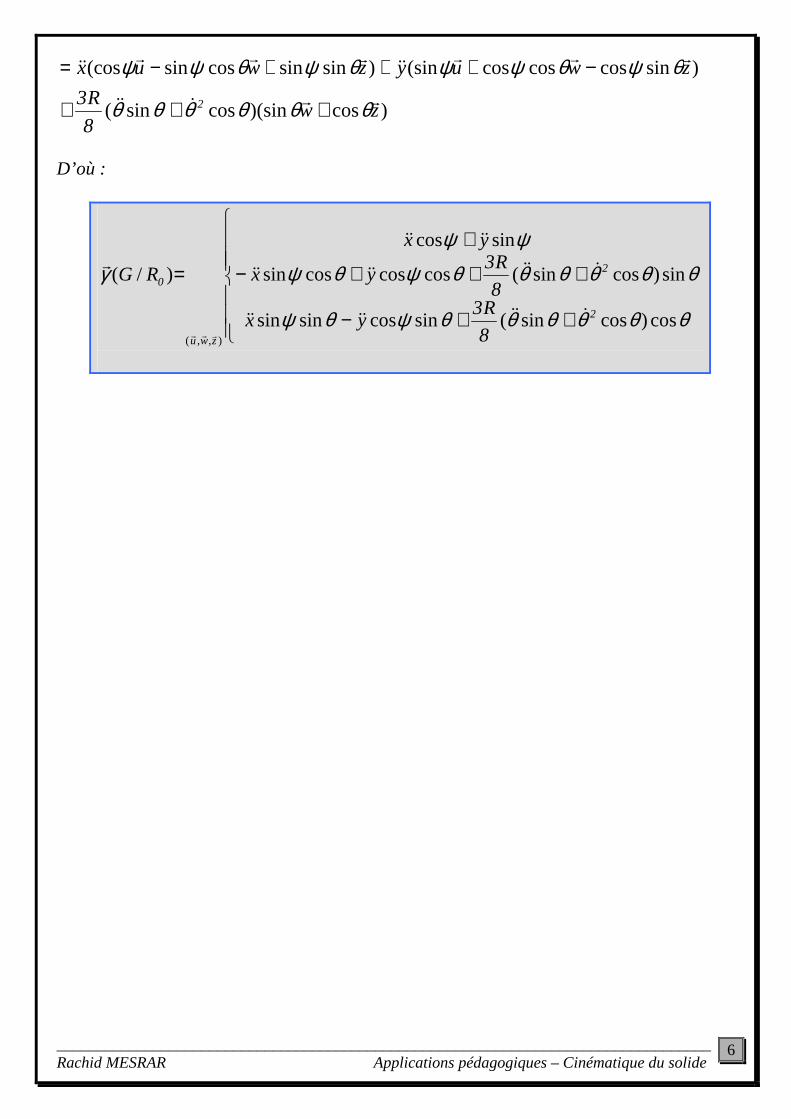
R7-
02
00
R
00 z
8
R3yyxx
dt
RGVdRG
0
r&&&r&&
r&&
r)cossin(
)/()/( θθθθγ +++=
=
)cos8
31( θ−= Rz (Lg)
__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
6
)cos)(sincossin(
)sincoscoscos(sin)sinsincossin(cos
zw8
R3
zwuyzwux
2 rr&&&
rrr&&
rrr&&
θθθθθθ
θψθψψθψθψψ
+++
−+++−=
D’où :
++−
+++−
+
=
θθθθθθψθψ
θθθθθθψθψ
ψψ
γ
cos)cossin(sincossinsin
sin)cossin(coscoscossin
sincos
)/(
),,(
2
2
zwu
0
8
R3yx
8
R3yx
yx
RG
&&&&&&&
&&&&&&&
&&&&
r
rrr
__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
7
Application pédagogiqueApplication pédagogiqueApplication pédagogiqueApplication pédagogique n° 2 n° 2 n° 2 n° 2 : mouvement d’un système pendulaire : mouvement d’un système pendulaire : mouvement d’un système pendulaire : mouvement d’un système pendulaire Notions abordéesNotions abordéesNotions abordéesNotions abordées
Condition de roulement sans glissementCondition de roulement sans glissementCondition de roulement sans glissementCondition de roulement sans glissement
Torseur cinématiqueTorseur cinématiqueTorseur cinématiqueTorseur cinématique
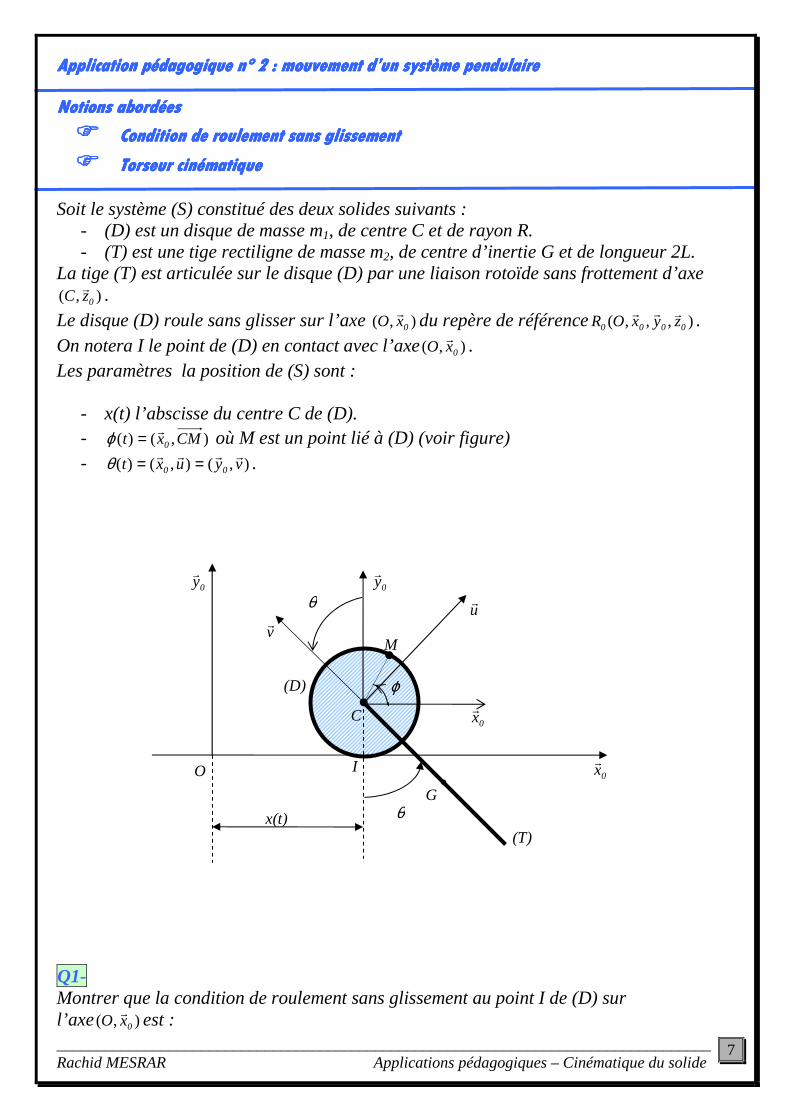
Soit le système (S) constitué des deux solides suivants :
- (D) est un disque de masse m1, de centre C et de rayon R. - (T) est une tige rectiligne de masse m2, de centre d’inertie G et de longueur 2L.
La tige (T) est articulée sur le disque (D) par une liaison rotoïde sans frottement d’axe ),( 0zC
r . Le disque (D) roule sans glisser sur l’axe ),( 0xO
r du repère de référence ),,,( 0000 zyxORrrr .
On notera I le point de (D) en contact avec l’axe ),( 0xOr .
Les paramètres la position de (S) sont :
- x(t) l’abscisse du centre C de (D). - ),()( CMxt 0
r=ϕ où M est un point lié à (D) (voir figure) - ),(),()( vyuxt 00
rrrr ==θ .
Q1- Montrer que la condition de roulement sans glissement au point I de (D) sur l’axe ),( 0xO
r est :
(D)
θ 0yr
0xr
x(t) (T)
M
I
0yr
0xr
vr
ur
O
G
C
ϕ
θ
EEEE
__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
8
0Rx =+ ϕ&&
Dans la suite du problème cette relation sera prise en compte.Dans la suite du problème cette relation sera prise en compte.Dans la suite du problème cette relation sera prise en compte.Dans la suite du problème cette relation sera prise en compte.
Q2- Déterminer les élément de réduction en C du torseur cinématique de (D) dans son mouvement par rapport à (R0). Q3- Donner les élément de réduction en G du torseur cinématique de (T) dans son mouvement par rapport à (R0).
__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
9
Solution détailléeSolution détailléeSolution détailléeSolution détaillée R1-
0000000 xRxyRzxxCIRDRDCVRDIVr
&&rr
&r&
rrr)()()/()/()/( ϕϕΩ +=−∧+=∧+∈=∈
La condition de roulement sans glissement impose :
0RDIV 0
rr=∈ )/(
Soit :
0Rx =+ ϕ&& R2- Les élément de réduction en C du torseur cinématique de (D) dans son mouvement par rapport à (R0) sont :
[ ]
=)/(
)/()/(
0
0
C
0RCV
RDRD r
rΩϑ
Avec
00 zRDr&
rϕΩ =)/(
Et
00
R
0 xRxxdt
OCRCV
0
r&
r&
rϕ−==
=)/(
D’où :
[ ]
−==
=00
00
C
0xRRCV
zRDRD r
&r
r&
r
ϕϕΩϑ
)/(
)/()/(
R3-

__________________________________________________________________________________ Rachid MESRAR Applications pédagogiques – Cinématique du solide
10
Les élément de réduction en G du torseur cinématique de (T) dans son mouvement par rapport à (R0) sont :
[ ]
=)/(
)/()/(
0
0
G
0RGV
RTRT r
rΩϑ
Avec
00 zRTr&
rθΩ =)/(
Et
uLxRuLxxvLzxxCGRTRCVRGV 0000000
r&r&
r&r&
rr&r&
rrrθϕθθΩ +−=+=−∧+=∧+= )()/()/()/(
D’où :
[ ]
+−==
=uLxRRGV
zRTRT
00
00
G
0 r&r&
r
r&r
θϕθΩϑ
)/(
)/()/(