Embed Size (px)
Citation preview

FFoorrmmaattiioonn LL..II..NN..EE..LL..
OOppttiioonn EElleeccttrroonniiqquuee
Rappel surla théorie
des circuits
année 2008
par Sylvain GERONIMI


Université Paul Sabatier Rappel sur la théorie des circuits
TABLE DES MATIERES
Circuits résistifs
Eléments de circuits Mise en équations
Loi de Kirchhoff Méthode des courants et tensions de branche Méthode des noeuds
Théorèmes fondamentaux Théorème de superposition Théorème de Thévenin Théorème de Norton Théorème de Millman Théorème de Kennely
Circuits en régime dynamique
Réponse temporelle Régime sinusoïdal établi Régime quelconque Théorèmes fondamentaux
Fonctions de transfert
Définition Propriétés Représentation du comportement
Conditions de réalité physique Conditions de stabilité
Fonctions de transfert de base Stabilité de systèmes électroniques
Système électronique asservi Conditions réelles d’un bon fonctionnement Compensation d’un système électronique asservi
Quadripôles
Représentation d’un quadripôle Caractérisation dynamique Mesures physiques de caractéristiques dynamiques Méthode de travail pour quadripôles en cascade Adaptation d’impédances
Annexes
Définitions et propriétés de la transformation de Laplace Tableau des transformées de Laplace
Exercices et problèmes
Théorèmes fondamentaux et mise en équations Réponse d’un circuit RL Fonction de transfert d’un amplificateur aux basses fréquences Corrélation entre temps de montée et fréquence de coupure haute Sonde passive d’oscilloscope Caractérisation d’un quadripôle Sensibilité d’un pont de Wheatstone
Sylvain Géronimi Page 1

Université Paul Sabatier Rappel sur la théorie des circuits
Sylvain Géronimi Page 2

Université Paul Sabatier Rappel sur la théorie des circuits
Circuits résistifs Lors des études statique ou dynamique que l’on entreprendra, le schéma électrique se compose de sources de tension et de courant indépendantes et dépendantes, et de résistances élémentaires et équivalentes. L’introduction de composants à stockage d’énergie s’effectuera au paragraphe suivant. Eléments de circuits - Un nœud est un point du circuit. - Une branche est un élément du circuit compris entre deux nœuds et traversé par le même
courant. - Une maille est une boucle formée par des branches. - Un dipôle est une portion de circuit entre deux nœuds (actifs ou passifs). Sources de tension et de courant indépendantes
v
i
Valim
RGiG
viG RG
i
vG
vG
sources idéales sources réelles Sources de tension et de courant contrôlées (dépendantes)
RS i
v REα vRβ i
vλ v
i
δ i
source de courant contrôlée par la tension source de tension contrôlée par la tension
(ou le courant) d’une autre branche (ou le courant) d’une autre branche Résistance et dipôle
IRV = 0
0
iv
r =
i0
v0dipôle
I
RV
Convention de signe voir théorème de Thévenin ou Norton
Sylvain Géronimi Page 3

Université Paul Sabatier Rappel sur la théorie des circuits
Mise en équations Lois de Kirchhoff Loi des nœuds : la somme de tous les courants qui entrent dans un nœud est égale à la somme des courants qui quittent le nœud. Le nombre d’équations indépendantes égale le nombre n de nœuds moins le nœud de référence (masse), soit n-1 équations. Loi des mailles : la somme de toutes les chutes de tension le long d’une maille est nulle. Le nombre d’équations indépendantes égale le nombre m de mailles indépendantes. Méthode des courants et tensions de branches L’analyse du circuit conduit à la résolution d’un système de m+n-1 équations à m+n-1 inconnues qui sont les courants de branche.
Exemple 1 : diviseur de tension à vide en régime statique
circuit à 1 maille et 0 nœud, d’où système de 1 équation à 1 inconnue (I)
( ) IRRVE 21 +=
IRVS 2= ⇒ ES VRR
RV21
2
+=
VE
VS
R1
R2
I
Exemple 2 : diviseur de tension en charge en régime statique
circuit à 2 mailles et 1 nœud, d’où système de 3 équations à 3 inconnues (I, I1, I2)
⎪⎩
⎪⎨
⎧
+=
=−
=−+
21
1223
121
00
IIIIRIR
VIRIR E
23 IRVS = ⇒ ES VRRRRRR
RRV213132
32
++=
R1
VE
R2 VSR3
I1
I2
I
Combinaisons série et parallèle de résistances Le même courant parcourt les deux résistances de l’exemple 1 et selon la loi de la maille :
21 RRI
VR E +=≡
La résistance totale d’un circuit série égale la somme des résistances.
Sylvain Géronimi Page 4

Université Paul Sabatier Rappel sur la théorie des circuits
La même tension est appliquée aux bornes des deux résistances de l’exemple 2 et selon la loi des nœuds :
SV
32
32
32'11
'1
RRRR
RRRV
IR S +
=⇒+=≡
La conductance totale d’un circuit parallèle égale la somme des conductances.
Reprise de l’exemple 2 : le circuit divise la tension '1 RR +
EES VRRRRRR
RRVRR
RV213132
32
1 ''
++=
+=
Le circuit divise le courant 32 // RR
IRR
RI
RR
RIVRR
I S32
2
32
32
32 11
111
+=
+=⇒⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
Exemple 3 : deux sources indépendantes
circuit à 2 mailles, 1 nœud, d’où R1
VSV1
R2
R3
V2
I1 I2
I3
système de 3 équations à 3 inconnues (I1, I2, I3)
⎪⎩
⎪⎨
⎧
=−+
=−+
=−+
00
0
321
23322
13311
IIIVIRIR
VIRIR
2313221
11
313221
23 V
RRRRRRRV
RRRRRRRI
+++
++=⇒
Calcul de la tension de branche 2313221
311
313221
3233 V
RRRRRRRRV
RRRRRRRRIRVS ++
+++
==
Méthode des nœuds Si le nombre de tensions nodales est inférieur au nombre de mailles indépendantes, l’analyse du circuit conduit à la résolution d’un système de n-1 équations à n-1 inconnues qui sont les tensions de nœuds, les courants de branche étant définis par la loi d’Ohm.
Reprise de l’exemple 2 : circuit à 1 nœud et 2 mailles, soit n-1 < m
équation du nœud → avec 21 III +=1RVV
I SE −= ,
21 R
VI S= ,
32 R
VI S=
d’où ES V
RRR
RV
321
1111
1
++= (même résultat)
Sylvain Géronimi Page 5

Université Paul Sabatier Rappel sur la théorie des circuits
Les théorèmes fondamentaux Théorème de superposition La réponse d’un circuit linéaire à plusieurs sources indépendantes égale la somme des réponses des sources considérées séparément. Pour calculer la réponse d’une source, les autres sources sont éteintes (uniquement les sources indépendantes idéales de tension et de courant assimilées respectivement à des courts-circuits et des circuits ouverts et non les sources contrôlées).
Reprise de l’exemple 3 : deux sources indépendantes, soit deux réponses
première réponse (V2 éteinte) 1323121
32 VRRRRRR
RRVS ++=
deuxième réponse (V1 éteinte) 2323121
31 VRRRRRR
RRVS ++=
d’où 2323121
311
323121
32 VRRRRRR
RRVRRRRRR
RRVS +++
++=
Théorème de Thévenin Tout circuit linéaire, fournissant une tension continue ou alternative, est équivalent à une source de tension en série avec une résistance vues entre ses bornes.
dipole
I I
V0VTh
RTh
V0
ThV : tension à vide , 0V
ThR : résistance calculée en court-circuitant toutes les sources de tension indépendantes et en ouvrant toutes les sources de courant indépendantes.
Reprise de l’exemple 2 : ( ) IRRV ThTh 3+=
R1 VE
R2 VS
R3
avec ETh VRR
RV21
2
+= et 21 // RRRTh =
⇒ IRVS 3= ThTh
S VRR
RV3
3
+=
Reprise de l’exemple 3 : Sylvain Géronimi Page 6

Université Paul Sabatier Rappel sur la théorie des circuits
Théorème de superposition
222
2 VRR
RVRR
R
Th
ThTh
Th ++
+=VS
avec 131
3 VRR
RV et Th += RTh 31 // RR=
R1
VS V1
R2
R3 V2
Théorème de Norton Tout circuit linéaire, fournissant un courant continu ou alternatif, est équivalent à une source de courant en parallèle avec une résistance vues entre ses bornes.
I I
V0 V0
INo RNodipole
NoI : courant de court-circuit,
NoR : résistance calculée en court-circuitant toutes les sources de tension indépendantes et en ouvrant toutes les sources de courant indépendantes. La dualité des théorèmes de Norton et Thévenin montre la transformation réciproque
V0=VTh
RNoINo
VTh
RTh
V0=RNo INo
II
V R NoNoTh IR= = NoTh RTh
ThNo R
VI =
Il faut remarquer qu’une source parfaite ne peut être remplacée par une source de l’autre type. Théorème de Millman Lorsque plusieurs sources de tension sont connectées en parallèle, on les transforme en sources de courant par transformation Thévenin → Norton.
Exemple 4 :
VS
R1R R2
I1R
V2
I I
I2VS
R1
V1
R2
Sylvain Géronimi Page 7

Université Paul Sabatier Rappel sur la théorie des circuits
RRR
RRV
RV
R
IV
k
kS 111
0
1
21
2
2
1
1
+⋅⋅⋅++
+⋅⋅⋅++==
∑∑ avec
k
kk R
VI =
Reprise de l’exemple 3 :
321
2
2
1
1
111RRR
RV
RV
VS++
+= (même résultat)
Ce théorème est utile pour déterminer un potentiel de nœud (calcul de filtres actifs avec AOI, par exemple). Théorème de Kennely Ce théorème permet la transformation d’un circuit en étoile (ou en T) en un circuit en triangle (ou en Π) et réciproquement.
R1
R1'
R2
R3
R3'
R2'
T → Π 1
'1 R
RR = , 2
'2 R
RR = , 3
'3 R
RR = avec 133221 RRRRRRR ++=
Π → T '
'3
'2
1 RRRR = , '
'1
'3
2 RRRR = , '
'2
'1
3 RRRR = avec '
3'2
'1
' RRRR ++=
Sylvain Géronimi Page 8

Université Paul Sabatier Rappel sur la théorie des circuits
Circuits en régime dynamique En régime dynamique ou variable, on a trois écritures possibles :
- écriture de la réponse temporelle (variable t), - écriture imaginaire en régime sinusoïdal (variable jω) - écriture symbolique en régime quelconque (variable de Laplace p).
Exemple 5 : circuit RC avec FCkR µ1,1 =Ω=
R
vE C
Réponse temporelle
Résistance )()( tiRtvR =
Condensateur ∫= dttiC
tvC )(1)(
Inductance )()( tidtdLtvL =
Il faut résoudre un système d’équations intégro-différentielles. Lorsque la solution analytique existe, la résolution demeure difficile. Les simulateurs de circuits mettent en œuvre des méthodes d’intégration numériques afin de fournir de façon exhaustive toute variable temporelle d’un circuit complexe.
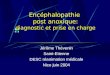
Application à l’exemple 5 : réponse à un échelon de tension d’amplitude VE avec le condensateur déchargé à t=0.
⎪⎩
⎪⎨⎧
+=
=
)()()(
)()(
tvtiRtv
tvdtdCti
CE
C ⇒ )()()( tvtvdtdtv CCE += τ avec RC=τ
qui conduit à la résolution de l’équation différentielle du 1° ordre ττ
)()(1)(
tvtvtv
dtd E
CC =+
- équation homogène (équation sans second membre)
0)(1)( =+ tvtvdtd
CC τ ⇒
τdt
vdv
C
C −= ⇒ τλtv
Log C −= d’où τλt
C etvH
−=)(
- variation de la constante (équation complète)
τλ
τλ
τλ τττ E
ttt Vetetet =++⎟⎠
⎞⎜⎝
⎛−−−−
)(1)('1)( ⇒ τ
λ τ Et
Vet =−
)(' d’où τττ
λt
E
tE eVdteVt == ∫)(
- solution particulière de l’équation complète
τλt
C ettvP
−= )()( d’où EC Vtv
P=)(
Sylvain Géronimi Page 9

Université Paul Sabatier Rappel sur la théorie des circuits
- solution globale
E
t
CCC VetvtvtvPH
+=+=−τλ)()()( avec ⇒ d’où 0)0( =Cv EV−=λ ⎟
⎟
⎠
⎞
⎜⎜
⎝
⎛−=
−τt
EC eVtv 1)(
Temps
0s 1.0ms 2.0ms 3.0ms 4.0ms
vE(t)
vC(t)
0V
0.4V
0.8V
1.2V
t = 3 ms
VC = 95 % de VE
de VE
VC = 63.2 %
t = 1 ms
, , pente à l’origine VVE 1= ms1=ττE
tC
Vtv
dtd
=⎥⎦
⎤⎢⎣
⎡
=0)( , , VvC 632.0)( ≅τ VvC 95.0)3( ≅τ
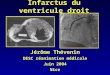
Application à l’exemple 5 : réponse à une excitation de tension sinusoïdale d’amplitude crête VE
avec le condensateur déchargé à t=0. Le second membre diffère ( )tVtv EE ωsin)( = . - variation de la constante
( ) [ tjEEt
emVtV
et ωτττ
ωλ ℑ==
− sin)(' ] ⇒
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+ℑ=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ℑ= ∫
⎟⎟⎠
⎞⎜⎜⎝
⎛+
ωτ
ττλ
ωτ
ωτ
j
emeV
dtemV
ttjt
Etj
E1
)(1
( ) ( ) ( ) ( ) ( )αωωωωτω
τω
τ
ωω−=⎥
⎦
⎤⎢⎣
⎡−
+=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
+ℑ ttt
j
tjtm sincossin11
11
sincos2
2
en posant τ
α1cos = et ⇒ ωα =sin 11 2
2 =+ ωτ
avec ( )τωα arctg=
d’où ( ) ταωαλt
E etVt −= sincos)(
- solution particulière de l’équation complète
τλt
C ettvP
−= )()( d’où ( )αωα −= tVtv ECP
sincos)(
- solution globale
)()( tvetvPC
t
C +=−τλ avec ⇒ 0)0( =Cv ααλ sincosEV=
d’où ( )αωααα τ −+=−
tVeVtv E
t
EC sincossincos)( Le premier terme correspond au régime transitoire et le second terme au régime établi ou permanent.
Sylvain Géronimi Page 10

Université Paul Sabatier Rappel sur la théorie des circuits
Temps
0s 2.0ms 4.0ms 6.0ms 8.0ms
vE(t)
vC(t)
-1.0V
0V
1.0V
régime transitoire régime établi
kHzf 1= , , , crêteE VV 1= ( ) °≅π=α 812arctg crêteC mVV 157cos ≅= α On observe les conditions initiales nulles sur le condensateur à t = 0 et le régime transitoire qui s’éteint rapidement. Pour plus de détails sur le régime permanent (ou établi), voir la réponse au paragraphe suivant.
Régime sinusoïdal établi Soit le courant sinusoïdal . ( )θω += tIti sin)( On calcule dans le domaine complexe, l’écriture devient
( ) ( )[ ] ( ) tjtj eIeItjtI ωθωθωθω ==+++ +sincos avec θjeII = le courant complexe.
Résistance tjtjR eIReV ωω = ⇒ IRVR =
avec θjR eIRV = (la tension en phase avec le courant)
Condensateur tjtjC eI
CjeV ωω
ω1
= ⇒ IjC
VC ω1
=
avec ⎟⎟⎠
⎞⎜⎜⎝
⎛−
= 2π
θ
ω
j
C eCIV (la tension en retard de π/2 par rapport au courant )
Inductance tjtjL eILjeV ωω ω= ⇒ IjLVL ω=
avec ⎟⎟⎠
⎞⎜⎜⎝
⎛+
= 2π
θω
j
L eILV (la tension en avance de π/2 par rapport au courant )
Application au circuit RC :
⎪⎪⎩
⎪⎪⎨
⎧
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
IjC
V
IjC
RV
C
E
ω
ω1
1
⇒ EC VRCj
Vω+
=1
1 et EVRCj
CjIωω
+=
1
2221 CR
VV
EC
ω+= et ( )RCarctgEC ωϕϕ −= avec Cj
CC eVV ϕ= et EjEE eVV ϕ=
Sylvain Géronimi Page 11

Université Paul Sabatier Rappel sur la théorie des circuits
EVCR
CI2221 ω
ω
+= et ( )RCarctgE ωπϕθ −+=
2
Temps
6.0ms 6.5ms 7.0ms 7.5ms 8.0ms 1 vE(t) vC(t) 2 i(t)
-1.0V
0V
1.0V 1
-1.0mA
0A
1.0mA 2
avance de 9° courant en
en retard de 81° tension VC
reference (0°) tension VE de
crêteE VV 1= , , °= 0Eϕ crêteC mVV 15741
12≅
π+= , ( ) °−≅−= 812πϕ arctgC
crêtemAI 141
1022
3≅
π+
π=
−
, °+≅⎟⎠
⎞⎜⎝
⎛= 921π
θ arctg
Notion d’impédance et d’admittance L’impédance (ou l’admittance) est une grandeur complexe issue du rapport de la tension vectorielle au courant vectoriel.
jXRIV
Z +== avec R et X respectivement résistance et réactance.
jBGZ
Y +==1 avec G et B respectivement conductance et susceptance.
Application au circuit RC :
Impédance vue de la source ωC
jRI
VZ
E 1−==
Admittance vue de la source 222222
22
111
ωω
ωω
CRCj
CRRC
ZY
++
+==
Régime quelconque On utilise les variables de Laplace pour résoudre les systèmes d’équations intégro-différentielles à coefficients constants. La pulsation généralisée est ici et le régime sinusoïdal est un cas particulier tel que .
ωσ jp +=ωjp =
Le tableau des transformées de Laplace, donné en annexe, sera l’outil mathématique pour le passage F(p) ↔ f(t). Si l’on considère des conditions initiales nulles et [ ] [ ])()(,)()( tvpVtipI XX LL ==
Sylvain Géronimi Page 12

Université Paul Sabatier Rappel sur la théorie des circuits
Résistance )()( pIRpVR =
Condensateur )(1)( pIpC
pVC =
Inductance )()( pIpLpVL = La méthode de travail est alors la suivante :
1) écrire les équations temporelles 2) passer en variables de Laplace 3) résoudre les équations pour obtenir la variable souhaitée 4) revenir à la fonction temporelle de cette variable.
Application au circuit RC :
A partir de l’équation dans le domaine temporel, on écrit
ττ
)()(1)(
tvtvtv
dtd E
CC =+ → )(1)(1)( pVpVpVp ECC ττ=+
ou directement, d’après les relations au-dessus :
⎪⎪⎩
⎪⎪⎨
⎧
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
)(1)(
)(1)(
pICp
pV
pIpC
RpV
C
E
⇒ p
pVpV EC τ+
=1
)()( avec RC=τ
- Réponse à l’échelon de tension p
VpV EE =)(
( )τ
+−=
τ+=
11)(
p
Vp
Vpp
VpV EEEC
Tableau des transformées α+
=p
pF 1)( → , )()( tuetf t ⋅= −α
d’où ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−=
−τt
EC eVtv 1)(
On vérifie les théorèmes de la valeur initiale et de la valeur finale qui donnent immédiatement, sans qu’il soit nécessaire de calculer vC(t), la valeur de cette fonction à l’origine et au temps infini :
pVpVp E
C τ+=
1)( ⇒ 0)(lim)(lim
0==
→∞→tvpVp CtCp
et ECtCpVtvpVp ==
∞→→)(lim)(lim
0
- Réponse à l’excitation sinusoïdale 22)(
ωω+
=p
VpV EE
Sylvain Géronimi Page 13

Université Paul Sabatier Rappel sur la théorie des circuits
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
+
+−+
++= 22
22
1
11
1)(
ωτ
ττω
τω
p
p
pVpV EC
On pose τ
α1cos = et ⇒ ωα =sin 11
22 =+
τω avec ( )τωα arctg= .
Tableau des transformées ( )αωω
ααω−=→
+
−= ttf
pppF sin)(sincos)( 22
d’où ( )αωααα τ −+=−
tVeVtv E
t
EC sincossincos)( L’application du théorème de la valeur finale ne peut s’appliquer dans ce cas, car t
tωsinlim
∞→
est indéterminée. De façon plus générale, il faut que la dérivée de la fonction temporelle décroisse quand , donc que . ∞→t 0<σ
Le tableau des transformées permet donc une résolution plus simple du problème. De plus, il faut remarquer que ce circuit RC est un circuit passe-bas dont la fonction de transfert en
tension RCppV
pV
E
C
+=
11
)()( fournit un pôle
RCp 1
−= qui détermine la constante de temps RC=τ (voir
paragraphe suivant). Théorèmes fondamentaux Les théorèmes fondamentaux restent valables pour tous les régimes. Le changement d’écriture est tel que :
R → Z ou et → )(pZ )(tvE EV ou )(pVE
Application au circuit RC :
En régime sinusoïdal → EC VZZ
ZV
21
2
+= avec RZ =1 et
ωjCZ 1
2 =
En régime quelconque → )()()(
)()(
21
2 pVpZpZ
pZpV EC +
= avec et RpZ =)(1 CppZ 1)(2 =
Sylvain Géronimi Page 14

Université Paul Sabatier Rappel sur la théorie des circuits
Fonctions de transfert Définition Soit un système linéaire (montage électronique) à une entrée e(t) et une sortie s(t) régi par une équation différentielle à coefficients constants
)()()()()()( 01
1
101
1
1 tsbtsdtdbts
dtdbteate
dtdate
dtda n
n
nn
n
nm
m
mm
m
m +++=+++−
−
−−
−
− LL
Dans le cas de conditions initiales nulles, on prend la transformée de Laplace des deux membres avec [ ])()( tepE L= et [ ])()( tspS L= , soit
[ ] [ ] )()( 01
101
1 pSbpbpbpEapapa nn
nn
mm
mm +++=+++ −
−−
− LL
⇒ avec )()()( pEpHpS ⋅=0
11
01
1)(bpbpbapapa
pHn
nn
n
mm
mm
+++
+++=
−−
−−
L
L
La fonction de transfert H(p) (ou transmittance) caractérise le comportement du système linéaire. Si l’on applique à l’entrée du système une impulsion de Dirac unitaire , on a d’où
. Ainsi, la fonction de transfert n’est rien d’autre que la transformée de Laplace de la réponse impulsionnelle du système.
)()( tte δ= 1)( =pE)()( pHpS =
Propriétés Conditions de réalité physique
Tous les coefficients ak et bi sont réels dans le cas présent d’un système linéaire. Il en résulte que les racines des polynômes du numérateur et du dénominateur sont réelles ou complexes conjuguées. On peut donc décomposer la fonction de transfert en produits
( )
( )∏
∏
=
=
−
−
= n
i
i
m
k
k
pp
zp
KpH
1
1)(
Dans tout système physique, l’amplitude de la réponse tend vers zéro lorsque la fréquence tend vers l’infini. Il en résulte qu’en régime sinusoïdal permanent
( ) nmjKjH −ω→ω)( soit mnK nm >⇒→− 0ω Attention, si l’on s’intéresse qu’aux basses fréquences d’un montage électronique à large bande, la fonction simplifiée sera telle que (passe-haut). nm =
Les termes et , appelés respectivement les zéros et les pôles de la fonction, sont réels ou complexes conjugués.
kz− ip−
Le nombre de pôles est supérieur (ou égal pour un passe-haut) au nombre de zéros.
Sylvain Géronimi Page 15

Université Paul Sabatier Rappel sur la théorie des circuits
L’ordre de l’équation différentielle du système correspond au degré n du polynôme du
dénominateur de la fonction de transfert. La fonction de transfert est donc d’ordre n. Conditions de stabilité Un système est dit stable si, lorsqu’il est écarté momentanément de l’état d’équilibre par une perturbation, il y revient lorsque la perturbation disparaît. La fonction H(p) représentant la réponse impulsionnelle du système, on peut décomposer S(p) en éléments simples si l’on suppose qu’on a n pôles simples :
⎟⎟⎠
⎞⎜⎜⎝
⎛−
++−
+−
=n
n
ppA
ppA
ppA
KpS L2
2
1
1)( → ( )tpn
tptp neAeAeAKts +++ +++= L2121)(
- cas d’un pôle réel iip σ=
ti
i
i ieAp
A σ
σ→
−
- cas de deux pôles complexes conjugués et iii jp ωσ +=1 iii jp ωσ −=2
( )ϕωωσωσ
σ +→+−
+−−
teAjp
Ajp
Ai
t
ii
i
ii
i i cos21
- cas de deux pôles imaginaires et ii jp ω=1 ii jp ω−=2
( ϕωωω
+→+
+−
tAjp
Ajp
Ai
i
i
i
i cos21 ) ⇒ l’amplitude du signal reste constante (oscillateur)
- cas particulier des pôles réels multiples d’ordre k
( ) ( ) ( )t
k
ikiiki
ik
i
i
i
i iektAtAA
pA
pA
pA σ
σσσ ⎥⎥⎦
⎤
⎢⎢⎣
⎡
−+++→
−++
−+
−
−
!1
1
21221 LL
Le système linéaire sera stable si tous ses pôles sont à partie réelle négative, soit . 0<iσ Ces divers cas sont illustrés pour une fonction de transfert d’ordre 2 de la forme
121)(
020
2++
=pp
pH
ωζ
ω
dont les racines de l’équation caractéristique sont 12002,1 −±−= ζωζωp .
Système stable si : ( ) 00 >⇒<ℜ ζipe
- → 1>ζ tptp eAeAts 2121)( +=
- → 1=ζ ( ) tetAAts 021)( ω−+=
- → 10 <<ζ ⎟⎠⎞⎜
⎝⎛ +−= − ϕζωζω teAts t 2
0 1cos)( 0
- → (cas particulier de l’oscillateur) 0=ζ ( ϕω += tAts 0cos)( )
Sylvain Géronimi Page 16

Université Paul Sabatier Rappel sur la théorie des circuits
Temps
0s 5ms 10ms 15ms 20ms s(t)
-2.0V
0V
2.0V
pôles réels (ζ = 1)
(ζ = 0) pôles imaginaires purs (oscillateur)
(ζ = 0.2) pôles complexes conjugués
système stable partie réelle de p < 0
Système instable si ( ) 00 <⇒>ℜ ζipe :
- → 1−<ζ tptp eAeAts 2121)( +=
- → 1−=ζ ( ) tetAAts 021)( ω+=
- → 01 <<− ζ ⎟⎠⎞⎜
⎝⎛ +−= − ϕζωζω teAts t 2
0 1cos)( 0
Temps
0s 5ms 10ms 15ms 20ms s(t)
-50V
-25V
0V
25V
50V
(ζ = -1)pôles réels
pôles complexes conjugués (ζ = -0.2)
partie réelle de p >0 système instable
Représentations du comportement Le signal musical présenté à l’entrée d’un système audio peut aller de 20 Hz à 20 kHz. Son amplification doit être sans distorsion d’amplitude et de phase. Il faut donc connaître l’amplitude (ou le module) et le déphasage (ou l’argument) de la fonction de transfert H(p) du circuit pour chaque fréquence.
)(pVouV SS )(pHouH
)(pVouV EE
Sylvain Géronimi Page 17

Université Paul Sabatier Rappel sur la théorie des circuits
En régime quelconque → )()()(
pVpVpH
E
S= avec conditions initiales nulles
En régime sinusoïdal → ( ) ( )ωω jbaV
VH
E
S+== avec ⎟
⎠
⎞⎜⎝
⎛=+=abarctgbaH Hϕet22
Application au circuit RC :
01
1)(
ωω
ωj
jHH+
== avec RC1
0 =ω ⇒ 2
01
1
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
ωω
H et ⎟⎟⎠
⎞⎜⎜⎝
⎛−=
00
ωωϕ arctgH
On peut représenter le comportement de la fonction de transfert de plusieurs manières :
Représentation de Bode : deux tracés indépendants - diagramme du module H défini en abscisse par la fréquence ou la pulsation sur
échelle logarithmique et en ordonnée par 20 log H en dB sur échelle linéaire. - diagramme de l’argument défini en abscisse par la fréquence ou la pulsation sur
échelle logarithmique et en ordonnée par l’argument en degrés ou radians sur échelle linéaire.
Hϕ
Représentation de Nyquist : un seul tracé dans le plan complexe du lieu des extrémités
des vecteurs, pour chaque fréquence ou pulsation. Ces vecteurs sont définis par le module H et l’argument Hϕ
Représentation de Black : un seul tracé dans un plan défini en abscisse par l’argument et en ordonnée par le module 20 log H dans les deux cas sur échelle linéaire.
En électronique, la représentation de Bode est retenue pour déterminer le comportement en fréquence d’un circuit. En effet, la nature des diagrammes permet de tracer simplement des caractéristiques approximatives appelées diagrammes asymptotiques de Bode. De plus, toute fonction de transfert étant le produit de fonctions de base, il suffit de représenter indépendamment chacune d’elles en module et en phase, puis d’en faire d’une part, la somme des modules à cause des valeurs logarithmiques et d’autre part, la somme des arguments à cause des propriétés des nombres complexes, ceci afin d’obtenir le résultat global. Fonctions de transfert de base On étudie ici les fonctions de transfert de base les plus utilisées.
ApH =)(0
En régime sinusoïdal ⎪⎩
⎪⎨⎧
°=
=→+=
0
log200)(
0
00
ϕω
AHjAjH dB
Sylvain Géronimi Page 18

Université Paul Sabatier Rappel sur la théorie des circuits
0
1 )(ωppH =
En régime sinusoïdal 0
1 )(ωω
ω jjH = → ⎪⎩
⎪⎨
⎧
°+=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
90
log20
1
01
ϕ
ωω
dBH
0ωω = → dB01log20 =
010ωω = → dB2010log20 +=
100ω
ω = → dB20101log20 −=
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz dB(H1(jω))
-40
0
40
+20 dB/décadepente
f0, 0 dB
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz arg(H1(jω))
0°
25°
50°
75°
100°
90°
0
2 1)(ωppH +=
En régime sinusoïdal 0
2 1)(ωωω jjH += →
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
02
2
02 1log20
ωω
ϕ
ωω
arctg
HdB
Sylvain Géronimi Page 19

Université Paul Sabatier Rappel sur la théorie des circuits
Aux basses fréquences 10<<
ωω ⇒ et (asymptotes horizontales) dB01log20 = °→ 02ϕ
Aux hautes fréquences 10>>
ωω ⇒
0log20
ωω (droite de pente + 20 dB par décade)
010ωω = → et dB2010log20 += °≅ 3.842ϕ
0100ωω = → et dB40100log20 += °≅ 4.892ϕ
0ωω = → dB32log20 += et °= 452ϕ
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz dB(H2(jω))
0
10
20
30
40
f0, +3 dB pente +20 dB/décade
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz arg(H2(jω))
0°
25°
50°
75°
0°
+90°
f0, +45°
0
31
1)(
ωp
pH+
=
En régime sinusoïdal
0
31
1)(
ωω
ωj
jH+
= →
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
03
2
03
0
1log200
ωω
ϕ
ωω
arctg
HdB
Sylvain Géronimi Page 20

Université Paul Sabatier Rappel sur la théorie des circuits
Les représentations de H3(p) sont symétriques de celles de H2(p) par rapport à l’axe des abscisses.
Ce cas correspond à l’application au circuit RC, circuit passe-bas dont la fonction de transfert en
tension RCppV
pV
E
C
+=
11
)()( fournit un pôle
0
11ω
−=−=RC
p qui détermine la constante de temps
. RC=τ
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz dB(H3(jω))
-40
-30
-20
-10
-0
f0, -3 dB -20 dB/décade pente
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz arg(H3(jω))
-75°
-50°
-25°
-0° 0°
-90°
f0, - 45°
20
2
0
4
21
1)(
ωωζ pp
pH++
=
ζ représentant le coefficient d’amortissement et ω0 la pulsation du système non amorti.
Sylvain Géronimi Page 21

Université Paul Sabatier Rappel sur la théorie des circuits
En régime sinusoïdal
020
24
21
1)(
ωωζ
ωω
ωj
jH+−
= →
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎟⎠
⎞⎜⎜⎝
⎛−−=
20
20
4
2
0
2
20
2
4
1
2
21log20
ωωωωζ
ϕ
ωωζ
ωω
arctg
HdB
Aux basses fréquences 120
20
2<<<<
ωωζ
ωω ⇒ et dB01log20 = °→ 04ϕ
(droites asymptotiques horizontales)
Aux hautes fréquences 120
20
2>>>>
ωωζ
ωω ⇒
0log40
ωω
−
(droite asymptotique de –40 dB par décade et coupant l’axe des abscisses pour ) 0ωω =et (droite asymptotique horizontale) °−→ 1804ϕ Pour la réponse réelle, trois cas :
ζ = 1 (racines doubles)
)(
1
1)( 232
0
4 pHp
pH =
⎟⎟⎠
⎞⎜⎜⎝
⎛+
=
ω
pour ⇒ et (2 fois module et argument de H0ωω = dB62log20 −=− °−= 904ϕ 3(p)) ζ > 1 (racines réelles distinctes)
)()(11
1)( "3
'3
21
4 pHpHpp
pH =
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=
ωω
avec ⎟⎠⎞⎜
⎝⎛ −+= 12
01 ζζωω , ⎟⎠⎞⎜
⎝⎛ −−= 12
02 ζζωω et . 2021 ωωω =
ζ < 1 (racines imaginaires distinctes)
Si 7.021
≅<ζ , dépassement de 212
1log20ζζ −
à la pulsation de résonance
20 21 ζωω −=R .
On appelle coefficient de surtension 212
1
ζζ −=Q (
ζ21
≅Q pour ζ <<1 ).
Sylvain Géronimi Page 22

Université Paul Sabatier Rappel sur la théorie des circuits
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz dB(H4(jω))
-40
0
-70
30
ζ = 0.05f resonance
ζ = 0.7 f0, -3 dB
ζ = 1 f0, -6 dB
ζ = 5 f2, -3 dB
f1, -3 dB ζ = 5
pente-40 dB/décade
-20 dB/décadepente
Fréquence
1.0Hz 10Hz 100Hz 1.0KHz 10KHz arg(H4(jω))
-150°
-100°
-50°
-0°
ζ = 5
ζ = 1
ζ = 0.7
ζ = 0.05
f2, -135° f0, -90°
f1, -45°
Stabilité des systèmes électroniques Système électronique asservi Un système électronique linéaire est, dans la plupart des cas, asservi (ou contre-réactionné).
ε(p)E(p)
B(p)
G(p)S(p)+
-
G(p) : fonction de transfert de la chaîne directe B(p) : fonction de transfert de retour G(p).B(p) : fonction de transfert de la boucle ouverte H(p) : fonction de transfert de la boucle fermée
)()(1)()(
)()(
pBpGpGpH
pEpS
+==
Sylvain Géronimi Page 23

Université Paul Sabatier Rappel sur la théorie des circuits
En régime sinusoïdal → ( ) ( )( ) ( )ωω+
ω=ω
jBjGjGjH
1
Lorsque ou encore ( ) ( ) 1−=ωω jBjG( ) ( )
( ) ( )[ ]⎪⎩
⎪⎨⎧
−=
=
πωω
ωω
jBjG
jBjG
arg1
, le dénominateur s’annule. Il y a instabilité
du système. Conditions réelles d’un bon fonctionnement Les conditions précitées ne sont valables que dans le domaine de la théorie et en régime établi. Un système asservi doit conserver ses performances en régime transitoire, ce qui impose de nouvelles conditions que l’on peut présenter par deux méthodes d’études couramment rencontrées. - 1° méthode : étude des diagrammes de Bode de ( ) ( )ωω jBjG
Le système est en boucle ouverte. Pour ( ) ( ) 1=ωω jBjG , il faut une marge de phase φM minimale de 45°, c’est-à-dire . ( ) ( )[ ] °−= 135arg ωω jBjGOn peut aussi utiliser la marge de gain de –10 dB lorsque ( ) ( )[ ] °−= 180arg ωω jBjG , qui est plus rarement utilisée en électronique.
- 2° méthode : étude de la fonction de transfert H(p)
Le système est en boucle fermée et la méthode demande de connaître l’analytique de la fonction H(p). Si l’ordre de la fonction est importante, l’étude devient rapidement difficile et on se rabat vers le tracé de Bode. Toute fonction réelle peut se décomposer en produits de fonctions du premier et du second ordre (formes canoniques) :
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟
⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=
∏
∏
2
2
2
2
211
211)(
kk
k
j
ll
l
i
ppp
ppp
pH
ωωζ
ω
ωωζ
ω
Les coefficients d’amortissement ζ des fonctions du second ordre doivent être plus grands ou égaux à 0.5 (pour les circuits électroniques).
Pour φM = 45° (1° méthode) correspond à peu près ζ = 0.5 (2° méthode) et la réponse impulsionnelle du système asservi produit un dépassement (overshoot) d’un peu moins de 20% de l’impulsion excitatrice (ou éventuellement d’un échelon).
Application à un A.O. de type 1 : ( )
8.621
105
ppG
+= ,
10001)( =pB
- 1° méthode (boucle ouverte)
8.621
100)()(p
pBpG+
=
Sylvain Géronimi Page 24

Université Paul Sabatier Rappel sur la théorie des circuits
Fréquence
10mHz 1.0Hz 100Hz 10KHz1 arg(G(jω)B(jω) 2 dB(G(jω)B(jω))
-100°
-50°
0° 1
-40
0
40 2
système stable
pente -20 dB/décade
fréquence de cassure10 Hz
+37 dB, -45°
0 dB, -89.5° 1 kHz
marge de phase de 90.5°
A la fréquence de 1 kHz (0 dB), la marge de phase est φM = 90°. Le système est stable (on ne peut définir une marge de gain car la phase ne peut atteindre –180°).
- 2° méthode (boucle fermée)
62801
1000
8.62101
10)(5
pppH
+≅
+=
Un système asservi du premier ordre est inconditionnellement stable.
Application à un A.O. de type 2 : ( )
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠
⎞⎜⎝
⎛+
=
5
5
1028.61
8.621
10pp
pG , 1)( =pB
- 1° méthode (boucle ouverte)
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠
⎞⎜⎝
⎛+
=
5
5
1028.61
8.621
10)()(pp
pBpG
Fréquence
1.0Hz 1.0KHz 1.0MHz 10mHz 100MHz dB(G(jω)B(jω)) dB(R(jω)) dB(G(jω)B(jω)R(jω))
0
50
100
-40
310 kHz, 0 dB 80 kHz, 0 dB
-40 dB/décade
-20 dB/décade
réseau correcteur
(instable) système non compensé
(stable) système compensé
10 Hz, 97 dB
1 Hz, 97 dB
-20 dB
Sylvain Géronimi Page 25

Université Paul Sabatier Rappel sur la théorie des circuits
Fréquence
1.0Hz 1.0KHz 1.0MHz 10mHz 100MHzarg(G(jω)B(jω)) arg(R(jω) arg(G(jω)B(jω)R(jω)
-200°
-100°
0°
-135°
310 kHz, -162° (0 dB)80 kHz, -129° (0 dB)
système compensémarge de phase de 51°
(stable)
(instable) marge de phase de 18° système non compensé
(retard de phase) réseau correcteur
A la fréquence de 310 kHz (0 dB), la marge de phase est φM = 18°, donc très inférieure à 45°. Le système est inutilisable car oscillatoire amorti.
- 2° méthode (boucle fermée)
112
2
662
2
55
5
1028.61028.61
1
1028.61028.68.62101
10)(ppppp
pH++
≅++++
=
On identifie à la forme canonique du second ordre
srad /102 60 =ω ou encore et kHzf 3160 = 16.0≅ζ
La faible valeur de ζ indique que le système est oscillatoire amorti. La fonction de transfert H(p) du système asservi correspond à un amplificateur opérationnel monté en suiveur (retour unitaire) instable (rapide).
Compensation d’un système électronique asservi La deuxième application montre un système présentant deux pôles au-dessus de l’axe 0 dB (sans présence de zéro). Le but de la compensation est de déplacer ces pôles en utilisant des circuits correcteurs afin d’obtenir une marge de phase correcte ( ). °≥ 45Mφ
Application à un A.O. de type 2 : On utilise un réseau correcteur passif R(p), dit à retard de phase, pour rendre le système stable. Mis en cascade avec les autres blocs, le but est de positionner le deuxième pôle de G(p)B(p) sur l’axe 0 dB (-135°). Pour cela, le zéro de R(p) inhibe le premier pôle de G(p)B(p) et le pôle de R(p) devient le nouveau premier pôle de G(p)B(p) à déplacer vers la gauche (ici d’une décade).
28.61
8.621
)(p
p
pR+
+=
Sylvain Géronimi Page 26

Université Paul Sabatier Rappel sur la théorie des circuits
On vérifie la stabilité du système par les deux méthodes. - 1° méthode (boucle ouverte)
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟
⎠
⎞⎜⎝
⎛ +
=
5
5
1028.61
28.61
10)()()(pp
pRpBpG
La marge de phase est alors φM = 51°.
- 2° méthode (boucle fermée)
102
2
552
2
55
5
1028.61028.61
1
1028.61028.628.6101
10)(ppppp
pH++
≅++++
=
On identifie à la forme canonique du second ordre
srad /1028.6 50 =ω ou encore et kHzf 1000 = 5.0=ζ
La valeur de ζ est bien en accord avec la marge de phase.
Sylvain Géronimi Page 27

Université Paul Sabatier Rappel sur la théorie des circuits
Quadripôles Un dipôle est un circuit à une paire de bornes (résistance, impédance, admittance, circuit équivalent de Thévenin ou de Norton, …). Un quadripôle est un circuit à deux paires de bornes, un dipôle d’entrée et un dipôle de sortie, ces dipôles n’ayant pas nécessairement un point commun. Le quadripôle est décrit par quatre variables qui sont les courants et les tensions des dipôles. On considère que deux de ces variables sont indépendantes et que les deux autres sont dépendantes, le système d’équations étant linéaire. En régime statique → et en régime dynamique → . Cette représentation est surtout utilisée en régime dynamique :
2211 ,,, IVIV 2211 ,,, iviv
i1 i2
quadripôle v2v1
Représentation d’un quadripôle Les combinaisons de variables prises deux à deux possibles, conduisent aux paramètres z, y, h, h’ et éventuellement à la matrice de transfert T et à la matrice caractéristique γ, L’écriture de ces paramètres est fonction de la pulsation généralisée p dans le domaine fréquentiel, ici la notation est simplifiée. Paramètres z
z21 i1z11
v2 v1
i1 z22z12 i2
i2
⎩⎨⎧
+=+=
2221212
2121111
izizvizizv
→
01
111
2 =⎥⎦
⎤⎢⎣
⎡=
iivz impédance d’entrée, sortie ouverte
01
221
2=⎥⎦
⎤⎢⎣
⎡=
iivz transimpédance directe, sortie ouverte
02
112
1=⎥⎦
⎤⎢⎣
⎡=
iivz transimpédance inverse, entrée ouverte
02
222
1=⎥⎦
⎤⎢⎣
⎡=
iivz impédance de sortie, entrée ouverte
Paramètres y
y21 v1
1 / y22
i2
v1
i1
1 / y11
y12 v2
v2
⎩⎨⎧
+=+=
2221212
2121111
vyvyivyvyi
→
Sylvain Géronimi Page 28

Université Paul Sabatier Rappel sur la théorie des circuits
01
111
2=⎥⎦
⎤⎢⎣
⎡=
vviy admittance d’entrée, sortie en court-circuit
01
221
2=⎥⎦
⎤⎢⎣
⎡=
vviy transadmittance directe, sortie en court-circuit
02
112
1=⎥⎦
⎤⎢⎣
⎡=
vviy transadmittance inverse, entrée en court-circuit
02
222
1=⎥⎦
⎤⎢⎣
⎡=
vviy admittance de sortie, entrée en court-circuit
Paramètres h
h21 i1h11
v2v1
i1
1 / h22
h12 v2
i2
⎩⎨⎧
+=+=
2221212
2121111
vhihivhihv
→
01
111
2=⎥⎦
⎤⎢⎣
⎡=
vivh impédance d’entrée, sortie en court-circuit
01
221
2 =⎥⎦
⎤⎢⎣
⎡=
viih gain direct en courant, sortie en court-circuit
02
112
1=⎥⎦
⎤⎢⎣
⎡=
ivvh gain inverse en tension, entrée ouverte
02
222
1=⎥⎦
⎤⎢⎣
⎡=
ivih admittance de sortie, entrée ouverte
Paramètres h’
h’12 i2 h’22
v1 v2
i2
1 / h’11
h’21 v1
i1
⎩⎨⎧
+=+=
2221212
2121111
''''
ihvhvihvhi
→
01
111
2
'=
⎥⎦
⎤⎢⎣
⎡=
ivih admittance d’entrée, sortie ouverte
01
221
2
'=
⎥⎦
⎤⎢⎣
⎡=
ivvh gain direct en tension, sortie ouverte
02
112
1
'=
⎥⎦
⎤⎢⎣
⎡=
viih gain inverse en courant, entrée en court-circuit
02
222
1
'=
⎥⎦
⎤⎢⎣
⎡=
vivh impédance de sortie, entrée en court-circuit
Sylvain Géronimi Page 29

Université Paul Sabatier Rappel sur la théorie des circuits
Remarques : - les paramètres y et h, définissant une source dépendante de courant en sortie (schéma de
Norton), sont utilisables pour modéliser le comportement de certains composants électroniques (transistors à effet de champ, transistors bipolaires, …),
- les paramètres z et h’, définissant une source dépendante de tension en sortie (schéma de Thévenin), sont utilisables pour l’étude des générateurs de tension (alimentations stabilisées, régulées, …).
Caractérisation dynamique De manière exhaustive, caractériser un quadripôle consiste à évaluer l’impédance d’entrée ZE, l’impédance de sortie ZS, et les différents transferts (gain en courant AI, gain en tension AV, gain en puissance AP, transimpédance ZT, transadmittance YT). Soit un quadripôle représenté par les paramètres h, excité par une source indépendante de tension réelle et chargé par une résistance R. La caractérisation s’effectue ici en régime dynamique avec des paramètres réels.
h R
RG
v1
i1 i2
v2vG
Equations du quadripôle → ⎩⎨⎧
+=+=
)2()1(
2221212
2121111
vhihivhihv
Equations des dipôles → ⎩⎨⎧
−=
−=
)4()3(
22
11
iRviRvv GG
- Gain en courant 1
2
iiai =
(2) et (4) → ⇒ 2221212 iRhihi −= )5(1 22
21
Rhhai +
=
- Impédance d’entrée 1
1
ivze =
(1), (4) et (5) → ⇒ 1121111 iaRhihv i−= )6(1 22
211211 Rh
Rhhhze +−=
- Gain en tension 1
2
vva v =
(4), (5) et (6) →e
i zvaRv 1
2 −= ⇒ )7(11
21
RhhRha v ∆+
−= avec 21122211 hhhhh −=∆
- Impédance de sortie 2
2
ivzs =
La méthode de travail est le calcul de l’impédance du dipôle vue aux bornes de sortie du quadripôle, la source indépendante étant éteinte et la charge absente.
(1), (3) et (2) → 211
121 v
Rhh
iG+
−= ⇒ )8(1
11
211222
Gs Rhhhh
z +−=
Sylvain Géronimi Page 30

Université Paul Sabatier Rappel sur la théorie des circuits
- Gain en puissance vip aaa =
(5) et (7) ⇒ ( ) ( ) )9(1 1122
221
RhhRhRhap ∆++
=
Le quadripôle excité par la source indépendante réelle peut être représenté par différentes topologies. On retient ici les topologies où le dipôle de sortie apparaît sous son schéma de Thévenin ou de Norton à vide.
On change de notation en posant ZE = ze. L’impédance de sortie de l’ensemble quadripôle + charge est alors et la tension à vide est RzZ sS //= 120
vAv V= avec ( )svV zRRaA += .
ZEv1
RG
AV v1v2o
i1
vG
i2
ZS
ZT i1
Transformation Thévenin → Norton ⇒ et avec NoTh ZZ = 1vYI TNo =S
VT Z
AY = (transconductance)
ZSv2o
v1 ZE
i1
RG
YT v1
AI i1vG
i2
Loi d’Ohm ⇒ (transrésistance) et 11 iZv E= EVT ZAZ = ES
VI Z
ZA
A = (gain en courant).
Mesures physiques de paramètres dynamiques A l’intérieur de sa bande passante, un amplificateur (qu’il travaille en tension ou en puissance) est défini par trois paramètres fondamentaux, à savoir la résistance d’entrée RE, la résistance de sortie RS et le gain en tension à vide AV. La caractérisation qui en découle se traduit sous la forme du quadripôle suivant :
RE
RS
iE
vSo
iS
vE
AV vE
Sylvain Géronimi Page 31

Université Paul Sabatier Rappel sur la théorie des circuits
- Détermination du gain en tension à vide
Théoriquement : avec SSEVS iRvAv +=0
E
SVS v
vAi 00 =⇒=
Pratiquement :
vSo
iE iS
AV vE
vE
RG RS
RE
vG
On applique, à l’entrée de l’amplificateur, un générateur de tension d’amplitude vG et de résistance interne RG et on récupère le signal de sortie non déformé.
- Détermination de la résistance d’entrée
Théoriquement : E
EE i
vR =
Pratiquement :
RG RE
vSo vE
iE
RS
R iS
AV vEvG
On s’intéresse à la tension de sortie pour un amplificateur de tension (vS > vE) afin obtenir une plus grande précision des mesures (faible niveau d ‘entrée, rapport signal sur bruit médiocre, …). Deux étapes sont nécessaires :
⎪⎪⎩
⎪⎪⎨
⎧
++=→≠
+=→=
GVEG
ES
GVEG
ES
vARRR
RvR
vARR
RvR
02
01
0
0 ⇒ G
S
SE R
vv
RR −−
=1
02
01
Cas particulier si l’on règle R pour obtenir en sortie RRv
v ES
S ≅⇒=2
01
02 si R >> RG.
- Détermination de la résistance de sortie
Théoriquement : méthode d’évaluation de la résistance d’entrée d’un dipôle.
v0 RS
RE
i0
AV 0
RG
Sylvain Géronimi Page 32

Université Paul Sabatier Rappel sur la théorie des circuits
Pratiquement :
vG
iS
RS
AV vE
iE
RE
RG
vE vS
R
Deux étapes sont nécessaires :
⎪⎩
⎪⎨
⎧
+=→∞≠
→>>
0
0
SS
S
SS
vRR
RvR
vRR ⇒ R
vv
RS
SS ⎟
⎟⎠
⎞⎜⎜⎝
⎛−= 10
Cas particulier si l’on règle R pour avoir en sortie RRv
v SS
S =⇒=2
0 .
Dans tous les cas, on s’assure de toujours avoir des signaux sur l’oscilloscope à l’image du signal délivré par le générateur, afin de satisfaire le contexte d’amplification linéaire. Méthode de travail pour quadripôles en cascade En pratique, un amplificateur est constitué de plusieurs étages à fonctions élémentaires, caractérisés sous forme de quadripôles. Pour chaque étage en cascade, le dipôle de sortie, représenté par le schéma équivalent de Thévenin à vide, est à l’image d’un générateur d’attaque pour l’étage suivant et ainsi de suite.
AV1 v1
RS1
v3
AV2 v2
RG RSnRS2
RE2v2RE1
AVn vn
v1vS
vG
REnvn
La méthode de travail, aux fréquences moyennes, consiste
- à découper la chaîne en n étages, - à calculer les résistances de sortie de chaque étage avec la présence de la résistance de
Thévenin à l’entrée de l’étage ( avec iSR
1−iSR GS RR ≡0
) et indépendamment de l’étage qui suit, en itérant du premier étage jusqu’au dernier,
- à calculer les gains en tension de chaque étage attaqué par la tension à vide de l’équivalent de
Thévenin de l’étage qui le précède associé à la résistance de sortie et non chargé par l’étage qui suit, en itérant du premier étage jusqu’au dernier,
iVA
1−iSR
- à calculer les résistances d’entrée de chaque étage chargé par la résistance d’entrée de l’étage qui suit, en itérant du dernier étage jusqu’au premier.
iER
Sylvain Géronimi Page 33

Université Paul Sabatier Rappel sur la théorie des circuits
La caractérisation de la chaîne d’amplification sera telle que
- le gain en tension global AV est égal au produit des gains en tension de chaque étage en prenant en compte les atténuations inter-étage
∏=
==n
i
VE
SV i
AvvA
1
- la résistance de sortie ZS de l’amplificateur est égale à la résistance de sortie du dernier étage
nSS RR =
- la résistance d’entrée ZE de l’amplificateur est égale à la résistance d’entrée du premier étage 1EE RR =
Adaptation d’impédances Soit une source réelle de tension indépendante (générateur de fonctions, …) ou dépendante (dipôle de sortie d’un amplificateur sous forme Thévenin) de force électromotrice vG et de résistance RG et une charge R (résistance ou dipôle d’entrée d’un amplificateur).
RG
i
vG
vR
⎪⎪⎩
⎪⎪⎨
⎧
+=
+=
G
G
GG
RRv
i
vRR
Rv
On calcule la puissance transmise à la charge → ( )2
22
GG
RRRv
RvP
+==
Etude des variations → ( )3
2
G
GG
RRRR
vdRdP
+
−=
Condition pour que la puissance dans la charge soit maximale → ⎪⎩
⎪⎨
⎧
=
=
⇒=
G
G
G
RvP
RR
dRdP
40 2
max
Pente à l’origine → 2
2
0 G
G
R Rv
dRdP
=⎥⎦
⎤⎢⎣
⎡
=
Tracez la courbe P(R).
Sylvain Géronimi Page 34

Université Paul Sabatier Rappel sur la théorie des circuits
- Adaptation au maximum de puissance → R = RG L’adaptation d’impédances est la condition nécessaire pour que la puissance transférée d’un circuit (équivalent de Thévenin) dans un autre circuit (charge) soit maximale. En H.F., pour transmettre l’énergie par câble coaxial, il faut que celui-ci soit adapté, c’est-à-dire qu’il voit à ses bornes une résistance égale à son impédance caractéristique ZC.
- Adaptation au maximum de tension → R >> RG
Il n’y a pas d’atténuation due au pont de résistances, la tension sur la charge est maximale ( ), le courant minimal et le transfert en puissance moindre. Gvv ≅L’attaque d’un étage collecteur commun sur un amplificateur à forte impédance d’entrée reporte la presque totalité de la tension.
- Adaptation au maximum de courant → R << RG
Cas dual du précédent, à savoir courant maximal, tension minimale et le transfert en puissance moindre. Le courant d’attaque d’un OTA sur une charge est, à peu de chose près, celui de court-circuit.
Exemple : en B.F., un amplificateur audiofréquence de résistance de sortie de 4 Ω, transmettra le maximum de puissance à une charge de 4 Ω ou à deux charges de 8 Ω en parallèle, mais il pourra fonctionner correctement sur une charge de 8 Ω. Cependant, un amplificateur audiofréquence de résistance de sortie de 8 Ω, ne pourra fonctionner correctement sur une charge de 4 Ω qu’à volume réduit afin que le courant de sortie reste convenable à cause de la puissance dissipée dans les transistors (et attention au court-circuit en sortie !).
Sylvain Géronimi Page 35

Université Paul Sabatier Rappel sur la théorie des circuits
Sylvain Géronimi Page 36

Université Paul Sabatier Rappel sur la théorie des circuits
Annexes Définition et propriétés de la transformation de Laplace Transformée directe
A une fonction f(t) correspond . [ ] ∫+∞ −+
==0
)()()( dtetftfpF tpL
On remarque que f(t) doit être nulle pour t < 0. )0( +f représentera la valeur de f(t) au temps t = 0 (condition initiale).
Linéarité [ ] )()( pFktfk =L
Addition [ ] )()()()( 2121 pFpFtftf +=+L
Dérivation )0()()( +−=⎥⎦⎤
⎢⎣⎡ fpFptfdtdL
Dérivations multiples ∑=
+−−−=⎥⎥⎦
⎤
⎢⎢⎣
⎡ n
k
kknnn
nfppFptf
dtd
1
)1( )0()()(L
Intégration ppFdf
t )()(0
=⎥⎦
⎤⎢⎣
⎡∫ ττL
Translation de la variable p [ ] )()( λλ −= pFtfe tL
Produit de convolution [ ] )()()()( pHpFthtf ⋅=∗L
Théorème de la valeur initiale )0()(lim +
∞→= fpFp
p
Théorème de la valeur finale )(lim)(lim0
tfpFptp ∞→→
=
Transformée inverse A une fonction F(p) correspond [ ])()( 1 pFtf −= L
Sylvain Géronimi Page 37

Université Paul Sabatier Rappel sur la théorie des circuits
Tableau des transformées de Laplace
F(p) f(t)
1 ( )tδ
p1 )(.1 tu
21
p )(. tut
1!+np
n )(. tut n
α+p1 )(. tue tα−
( )21α+p
)(. tuet tα−
( )( )βα ++ pp1
αβ
βα
−− −− tt ee
( )2α+
+
pkp ( )[ ] tetk αα −+− 1
( )( )βα +++
ppkp ( ) ( )
αββα βα
−−−− −− tt ekek
( )21α+pp
( )2
11αα α tet −+−
( )( )βα ++ ppp1
( )αβαβαβ
αβ
βα
−−
−−− tt ee1
22 ωω+p
tωsin
22 ω+pp tωcos
22sincos
ωϕϕω
+
±
pp ( )ϕω ±tsin
22sincos
ωϕωϕ
+pp m ( )ϕω ±tcos
( )( ) 22
sincosωλ
ϕλϕω
++
+±
pp ( )ϕωλ ±− te t sin
( )( ) 22
sincosωλ
ϕωϕλ
++
+
pp m ( )ϕωλ ±− te t cos
(à partir de la septième ligne le produit par u(t) est sous-entendu)
Sylvain Géronimi Page 38

Université Paul Sabatier Rappel sur la théorie des circuits
Exercices et problèmes Théorèmes fondamentaux et mise en équations Diviseur de tension / courant
R1
VE
R3
VSR2
Exprimez la tension en fonction de . SV 321 ,,, RRRVE
R1 R2
I
R3
I2
Exprimez le courant en fonction de . 2I 321 ,,, RRRI Applications de Thévenin / Norton
R1
10
R2
30
V 10 V
R
5
I
Evaluez le courant I.
R2
A
B
I
R1
V
R3
Donnez le générateur de Thévenin équivalent au dipôle.
Sylvain Géronimi Page 39

Université Paul Sabatier Rappel sur la théorie des circuits
R1
k i1 Rchargev R2
i1
Donnez le générateur de Thévenin équivalent au dipôle.
AR1
1k
v1Vac0Vdc
B
R4
100
R2
1k
-105 vB
Rcharge
1k
R31Meg
Evaluez les éléments du générateur de Thévenin équivalent au dipôle. Application du théorème de Millman
Y4
Y1 Y3
veY2
+
-
Y5
vs
A B
Exprimez le rapport des tensions e
s
vv en fonction des admittances du circuit, l’amplificateur de
tension étant idéal (entrées équipotentielles
iY
−+ = vv ).
Sylvain Géronimi Page 40

Université Paul Sabatier Rappel sur la théorie des circuits
Réponse d’un circuit RL Soit le circuit RL avec condition initiale nulle.
vE L
100mH
R
100
Une excitation sinusoïdale d’amplitude crête VE est appliquée au circuit. Le but du problème est d’obtenir les réponses du courant circulant dans la maille et de la tension aux bornes de l’inductance par les trois techniques suivantes :
)(ti)(tvL
Réponse temporelle (variable t) 1. Ecrivez l’expression analytique du courant. 2. Ecrivez l’expression analytique de la tension. 3. Démontrez que la tension est en avance de π/2 par rapport au courant en régime permanent. Régime sinusoïdal établi (variable jω) 4. Ecrivez les expressions du module et de l’argument du courant et de la tension. 5. Comparez ces résultats à ceux obtenus précédemment en régime permanent. Transformées de Laplace (variable p) 6. Ecrivez la fonction de transfert en tension )()( pVpV EL . 7. Tracez les courbes de réponse dans le plan de Bode (module et argument). 8. Par transformées de Laplace, donnez l’expression de la tension. Fonction de transfert d’un amplificateur aux fréquences basses Soit la fonction de transfert
⎟⎠⎞
⎜⎝⎛ +⎟⎠⎞
⎜⎝⎛ +
⎟⎠⎞
⎜⎝⎛ +
−=
2001
63.01
21
63285)(pp
pp
pH
1. Démontrez que cette fonction est décomposable en fonctions de transfert de base. 2. Représentez les réponses en fréquence dans le plan de Bode en prenant comme variable la
pulsation ω (module et argument).
Sylvain Géronimi Page 41

Université Paul Sabatier Rappel sur la théorie des circuits
Corrélation entre temps de montée et fréquence de coupure Soit le circuit RC avec condition initiale nulle.
R
vE C
Réponse à un échelon unité de tension 1. Ecrivez l’expression du temps de montée défini par la différence des temps pour atteindre
respectivement 90% et 10% de la valeur finale. rt
Réponse en fréquence 2. Ecrivez la relation entre la fréquence de coupure du circuit passe-bas et le temps de montée. hf (Réponse : tr = 2.2 τ, fh = 0.35 / tr) Sonde passive d’oscilloscope Soit le schéma de principe d’une sonde passive atténuatrice.
capacitévE R0
1Meg
CC
100pdu câble
RS
entrée de l'oscilloscope
CP
13p
CS
embout de sonde
câble de mesure
v0
L’amplificateur vertical de l’oscilloscope est représenté par le schéma équivalent parallèle - aux 0R pCbornes duquel existe la tension . 0v 1. Ecrivez la fonction de transfert )()(0 pVpV E . 2. Donnez la condition pour que la fonction de transfert soit indépendante de la fréquence. Evaluez
la résistance pour avoir une atténuation de rapport 1/10 et déduisez la valeur de la capacité découlant de la condition.
SR
0SC3. Déterminez l’impédance d’entrée de la sonde branchée sur l’oscilloscope, sous forme d’un
schéma R-C parallèle à la condition précédente. 4. Calculez et tracez les réponses temporelles de à un échelon de tension unité pour une
capacité de sonde réglée aux valeurs )(0 tv
SS CC ∆±0
(on supposera que 10SS CC ∆>> et que les bandes passantes de la sonde et de l’oscilloscope sont très larges).
(Réponse : RS = 9 MΩ, CSo = 12.56 pF, 10 MΩ // 11.3 pF)
Sylvain Géronimi Page 42

Université Paul Sabatier Rappel sur la théorie des circuits
Caractérisation d’un quadripôle Le schéma suivant représente un étage amplificateur excité par une source réelle de tension et chargé par une résistance.
R1
k i1 RvG
i1
R2
RG
v2v1
i2
1. Ecrivez l’expression de la résistance d’entrée du quadripôle chargé par R. ER2. Ecrivez les expressions de la résistance et de la tension de Thévenin constituant le
dipôle de sortie chargé par R. ThR Thv
3. Dessinez le schéma équivalent du quadripôle en utilisant les éléments précédents. Sensibilité d’un pont de Wheatstone Le schéma du pont de Wheatstone est le suivant :
1
R4
R1
2
R3
VE
1Vdc
VM
R2
1. Ecrivez l’expression analytique de la tension différentielle VM aux points de mesure 1 et 2 et
déduisez la condition pour que cette tension soit nulle. 2. Déterminez la sensibilité du pont et écrire la condition sur les résistances pour que cette
sensibilité soit maximale. 3. Pour des résistances à tolérance 1%, évaluez l’erreur maximale sur la tension VM dans le cas
d’une sensibilité maximale du pont. (Réponse : ∆VM = 10 mV)
Sylvain Géronimi Page 43

Université Paul Sabatier Rappel sur la théorie des circuits
Sylvain Géronimi Page 44