Embed Size (px)
Citation preview
Les ondes ultrasonoresLes ondes ultrasonores
CT04CT04
INTRODUCTIONINTRODUCTIONI – IntroductionI – Introduction
•Méthode de contrôle qui consiste à transmettre des impulsions acoustiques de haute fréquence (les ultrasons) dans un matériau.
•Ces ondes se propagent dans le matériau suivant différents modes de propagation.
•La présence d'une discontinuité, sous le trajet les ultrasons, provoque la réflexion partielle des impulsions.
•Le signal réfléchi est recueilli par un transducteur ultrasonore.
INTRODUCTIONINTRODUCTIONI – IntroductionI – Introduction
•Il s ’agit d ’ondes mécaniques, donc induisant un déplacement de matière, dans un matériau fluide ou solide
•On envoie l’onde : ce n ’est pas un phénomène d’émission acoustique qui, lui, est passif.
•On manipulera plutôt des faisceaux que des ondes illimitées dans l ’espace (ondes planes) ainsi que des ondes impulsionnelles plutôt que des ondes monochromatiques
II – Les types d’ondesII – Les types d’ondes
Dans les milieux solides, on considère la propagation d’ondes suivants différents types de critères :
polarisation
domaine d'application
milieux d'existence
II – Les types d’ondes 1) PolarisationII – Les types d’ondes 1) Polarisation
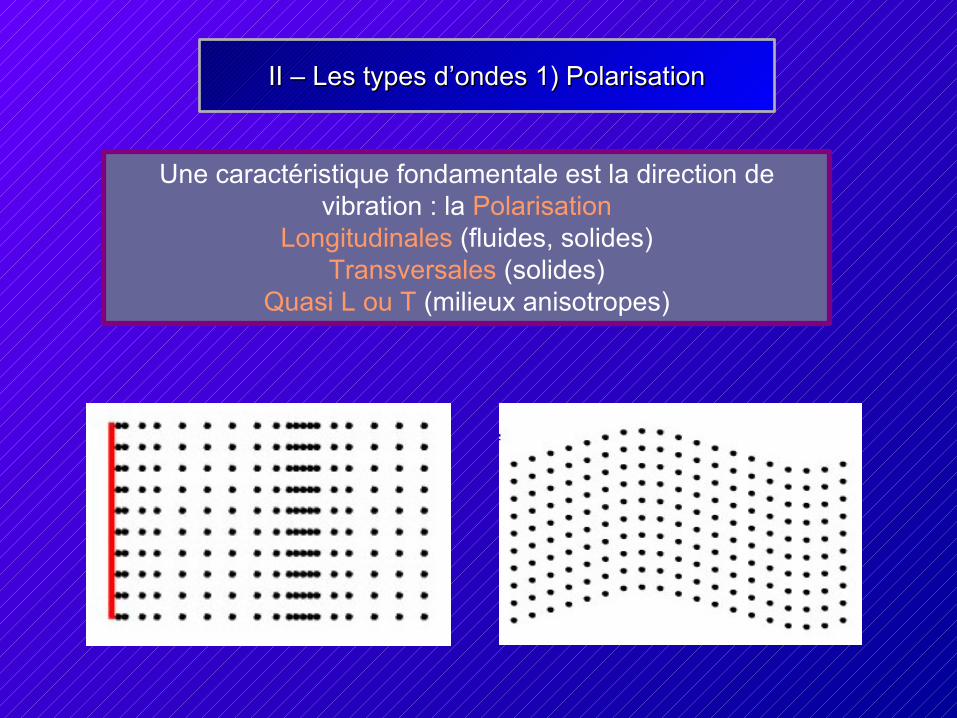
Une caractéristique fondamentale est la direction de vibration : la Polarisation
Longitudinales (fluides, solides)Transversales (solides)
Quasi L ou T (milieux anisotropes)
II – Les types d’ondes 1) PolarisationII – Les types d’ondes 1) Polarisation
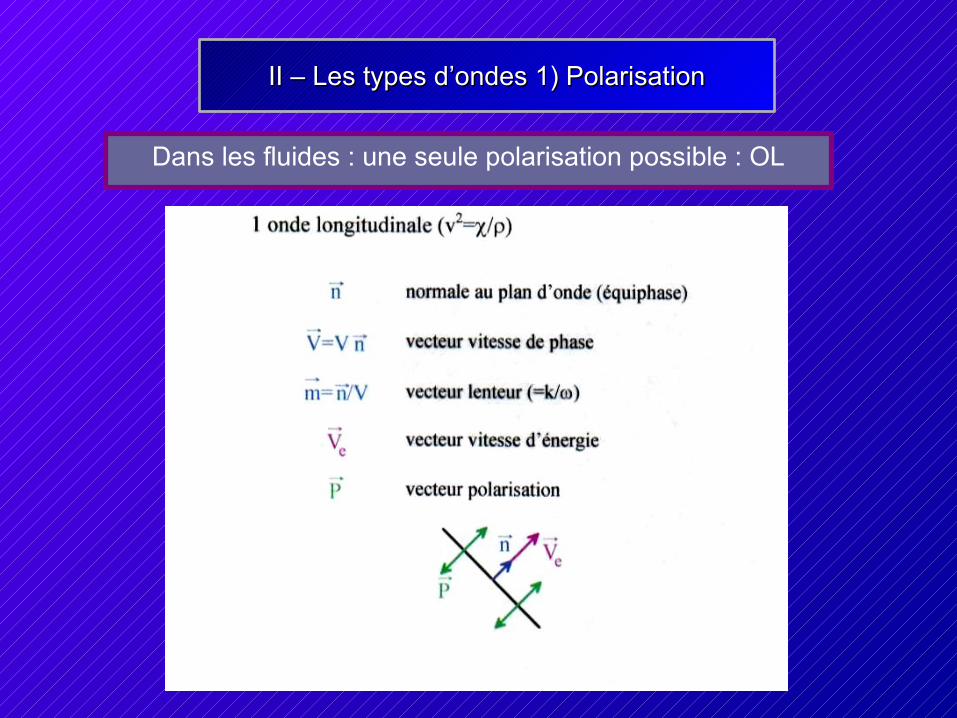
Dans les fluides : une seule polarisation possible : OL
II – Les types d’ondes 1) PolarisationII – Les types d’ondes 1) Polarisation
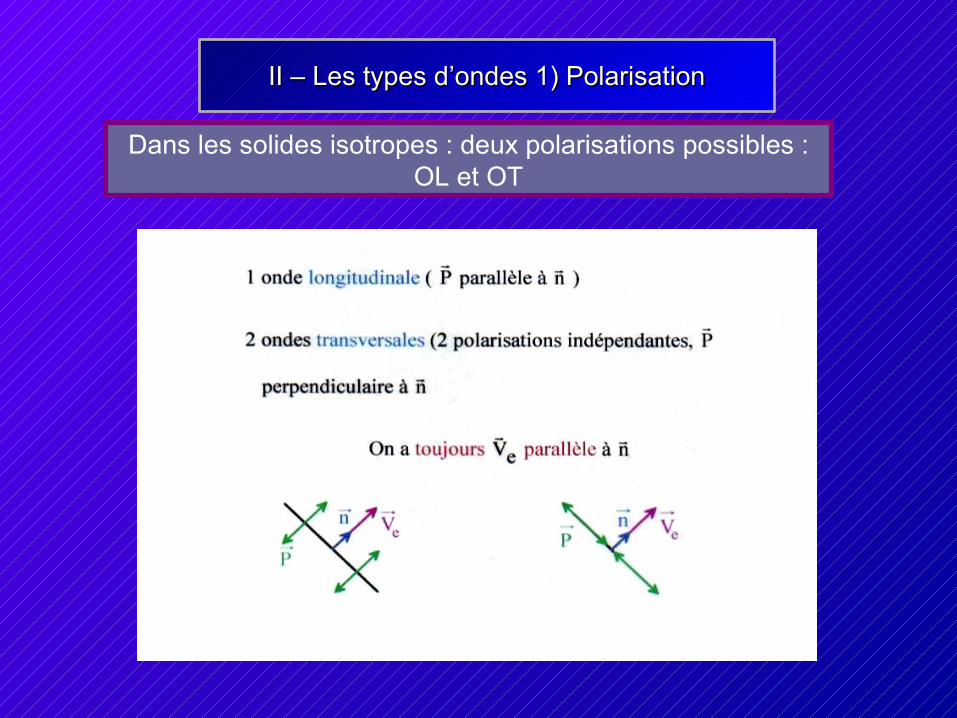
Dans les solides isotropes : deux polarisations possibles : OL et OT
II – Les types d’ondes 2) Quantités en jeuII – Les types d’ondes 2) Quantités en jeu
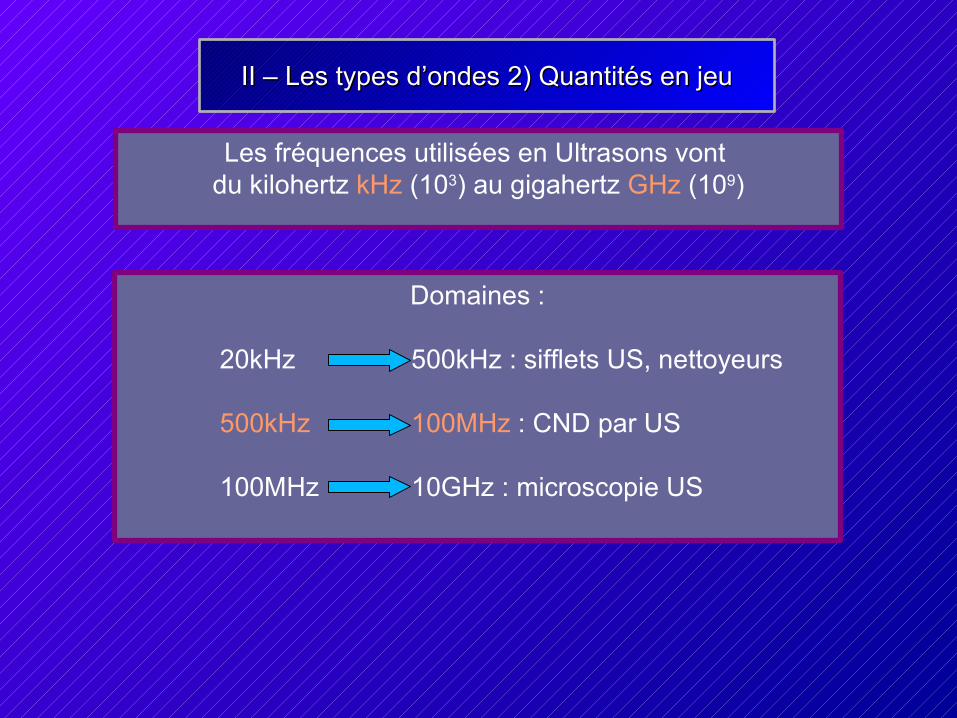
Les fréquences utilisées en Ultrasons vont du kilohertz kHz (103) au gigahertz GHz (109)
Domaines :
20kHz 500kHz : sifflets US, nettoyeurs
500kHz 100MHz : CND par US
100MHz 10GHz : microscopie US
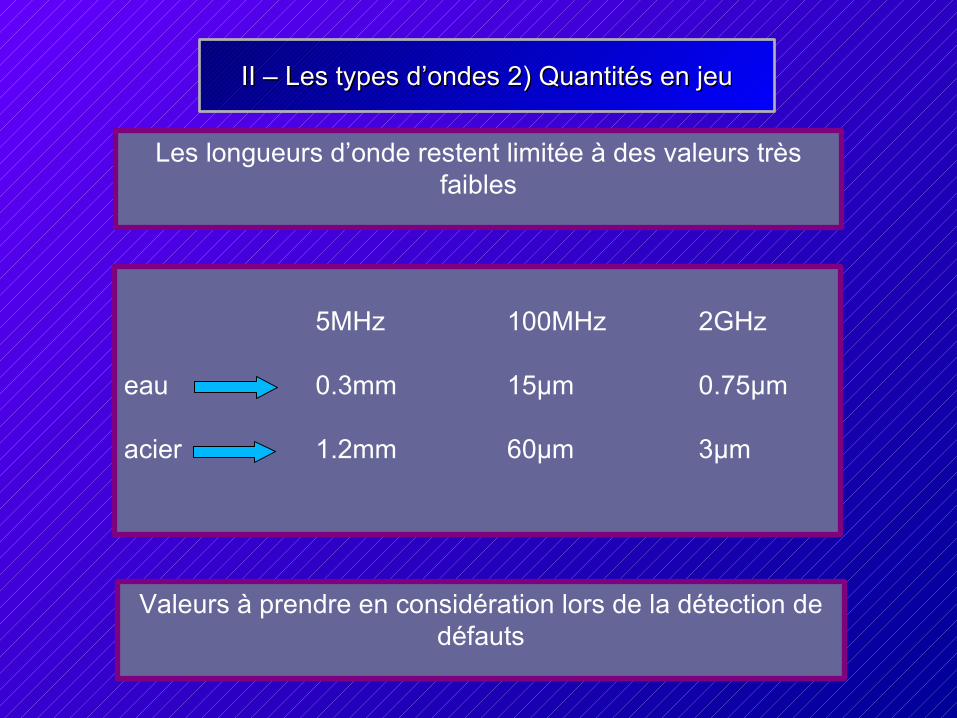
5MHz 100MHz 2GHz
eau 0.3mm 15µm 0.75µm
acier 1.2mm 60µm 3µm
II – Les types d’ondes 2) Quantités en jeuII – Les types d’ondes 2) Quantités en jeu
Les longueurs d’onde restent limitée à des valeurs très faibles
Valeurs à prendre en considération lors de la détection de défauts
II – Les types d’ondes 2) Quantités en jeuII – Les types d’ondes 2) Quantités en jeu
Plusieurs paramètres relatifs à l’onde sont d’un grand interêt :
•déplacement de matière (=> trajectoires ??)
•déformation du milieu
•contraintes (~Pa)
ces quantités sont :•saclaires•vectorielles•tensorielles
II – Les types d’ondes 3) Domaines d’existenceII – Les types d’ondes 3) Domaines d’existence
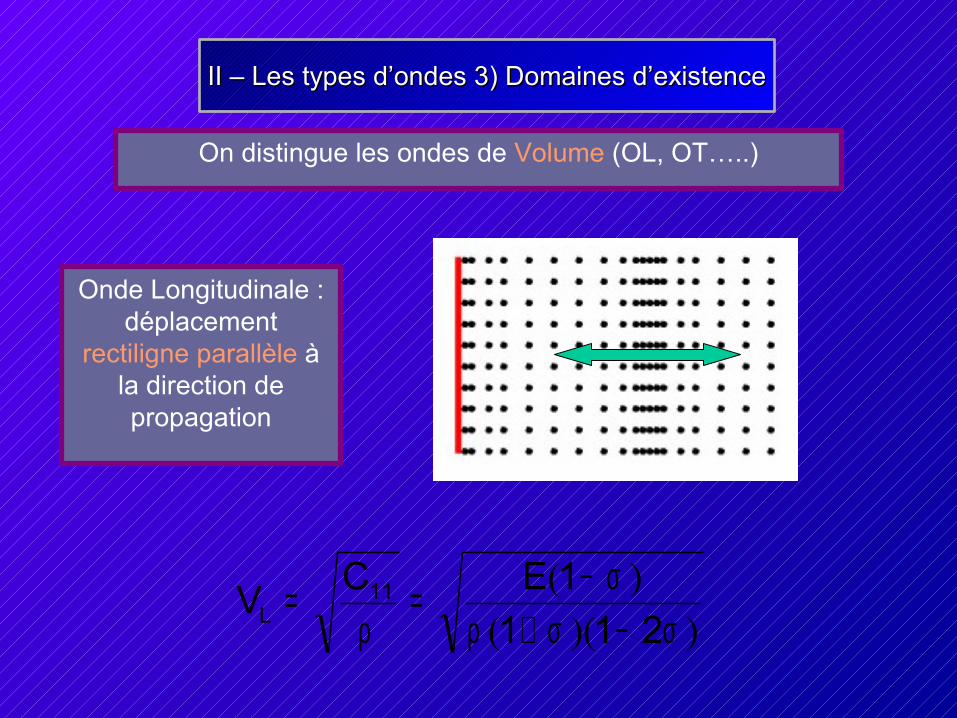
On distingue les ondes de Volume (OL, OT…..)
Onde Longitudinale : déplacement
rectiligne parallèle à la direction de propagation
))(()(
σ−σ+ρσ−=
ρ=
2111ECV 11
L
II – Les types d’ondes 3) Domaines d’existenceII – Les types d’ondes 3) Domaines d’existence
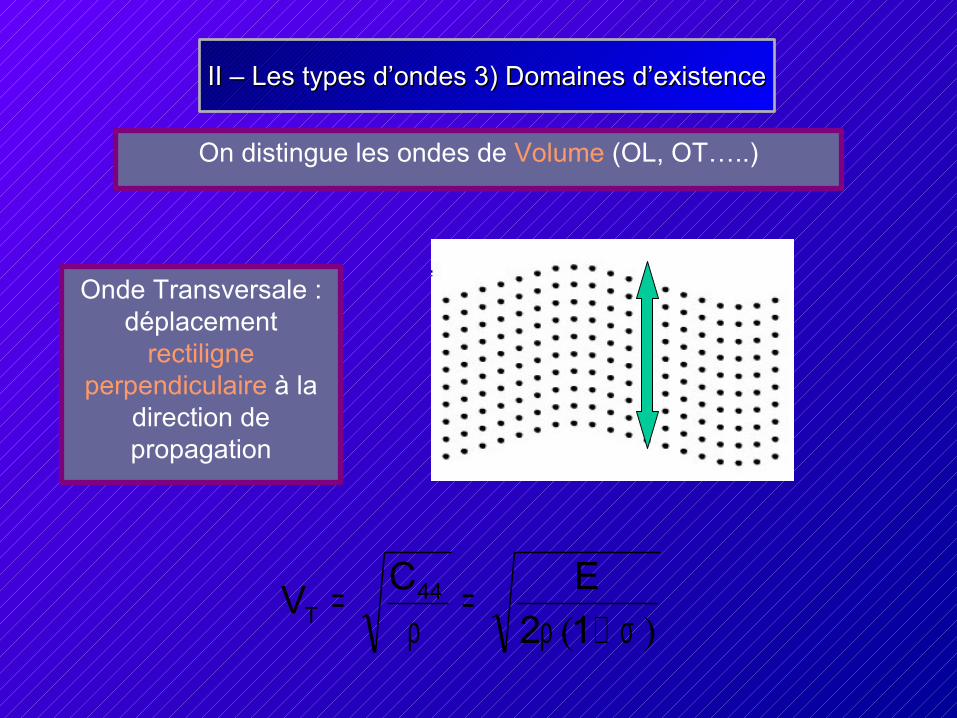
On distingue les ondes de Volume (OL, OT…..)
Onde Transversale : déplacement
rectiligne perpendiculaire à la
direction de propagation
)( σ+ρ=
ρ=
12ECV 44
T
II – Les types d’ondes 3) Domaines d’existenceII – Les types d’ondes 3) Domaines d’existence
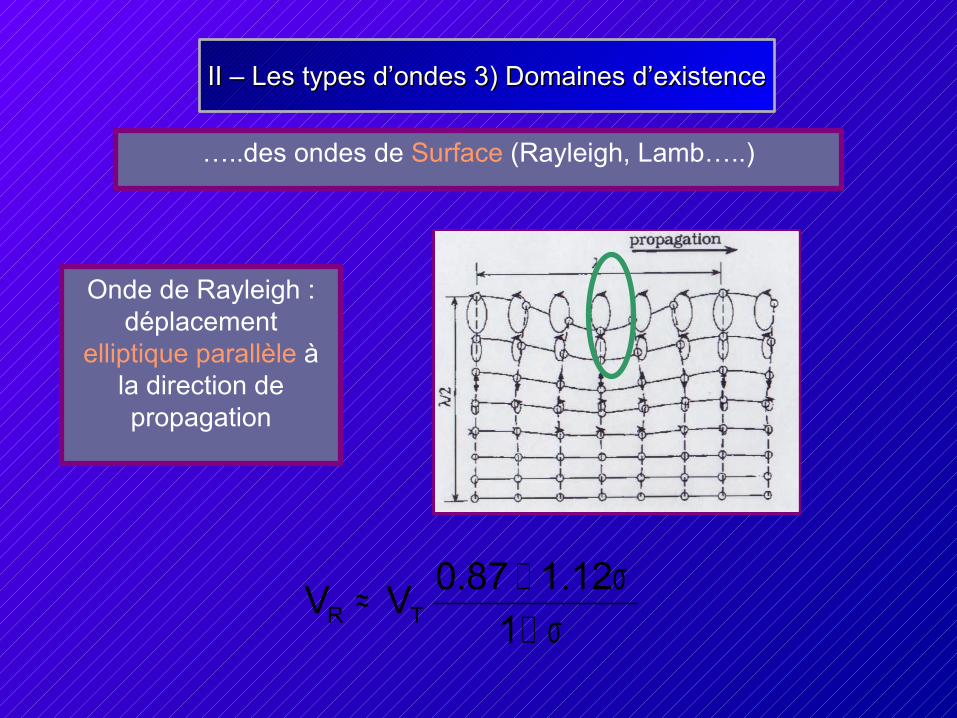
…..des ondes de Surface (Rayleigh, Lamb…..)
Onde de Rayleigh : déplacement
elliptique parallèle à la direction de propagation
σ+σ+≈
1121870VV TR..
II – Les types d’ondes 3) Domaines d’existenceII – Les types d’ondes 3) Domaines d’existence
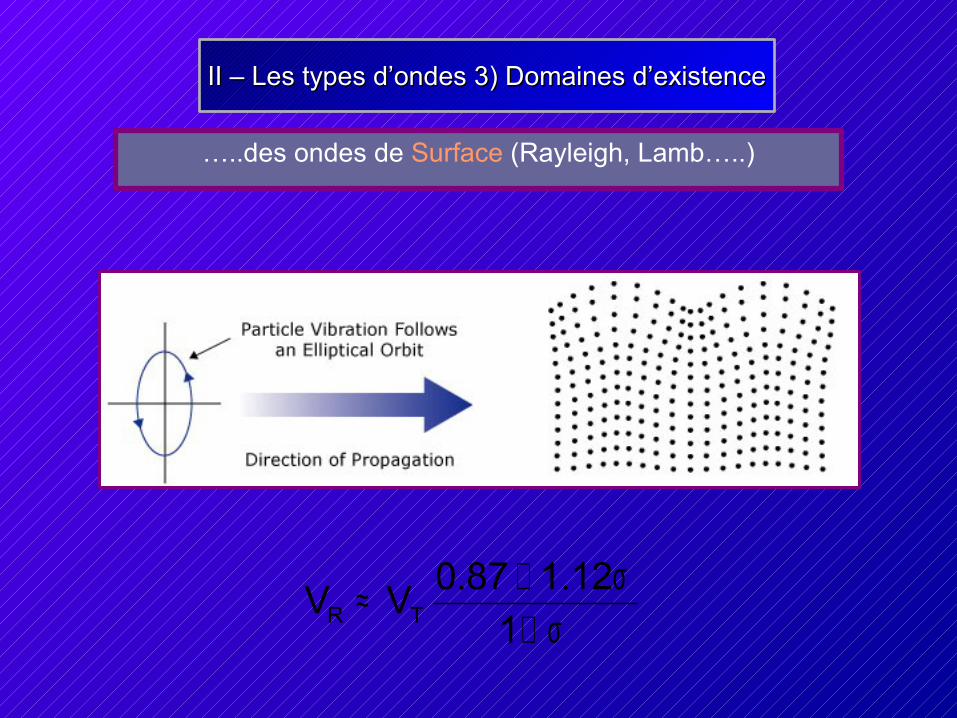
…..des ondes de Surface (Rayleigh, Lamb…..)
σ+σ+≈
1121870VV TR..
II – Les types d’ondes 3) Domaines d’existenceII – Les types d’ondes 3) Domaines d’existence
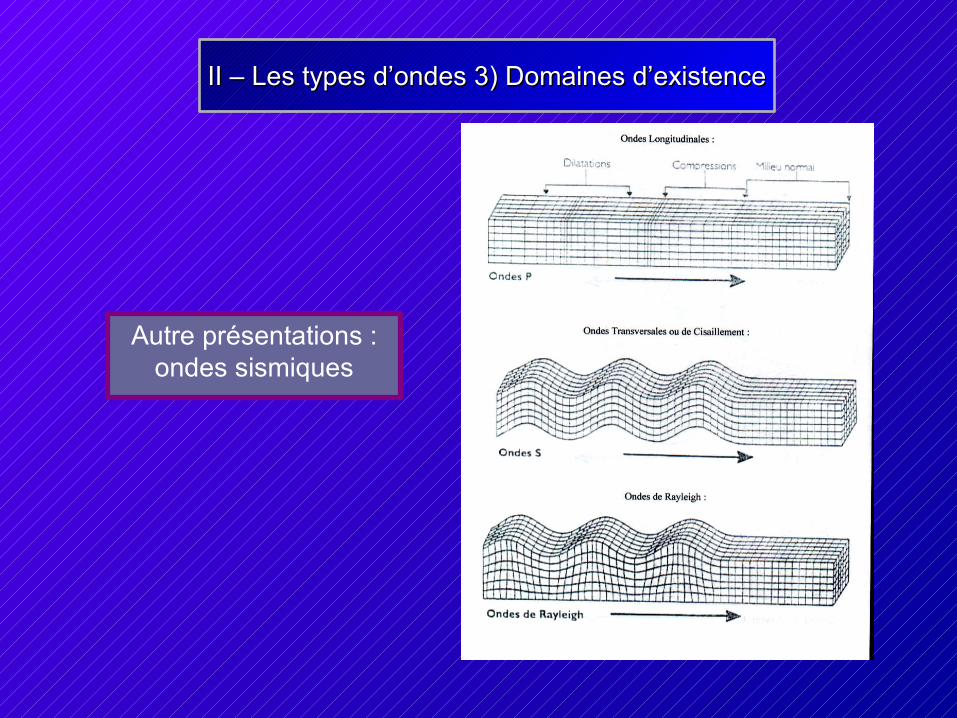
Autre présentations : ondes sismiques
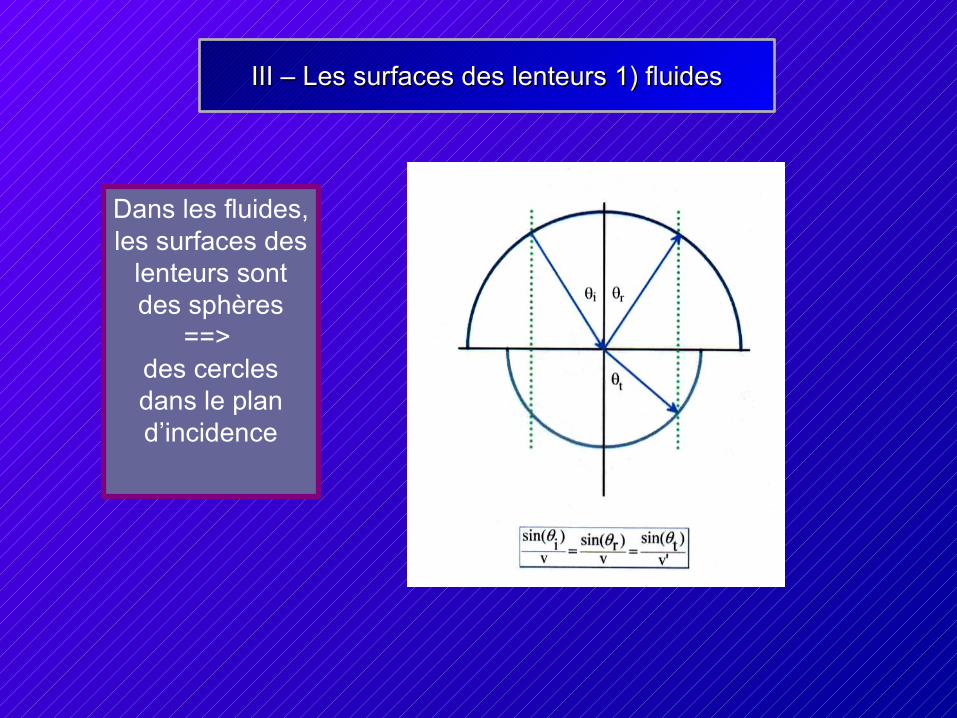
III – Les surfaces des lenteurs 1) fluidesIII – Les surfaces des lenteurs 1) fluides
Dans les fluides, les surfaces des
lenteurs sont des sphères
==> des cercles dans le plan d’incidence
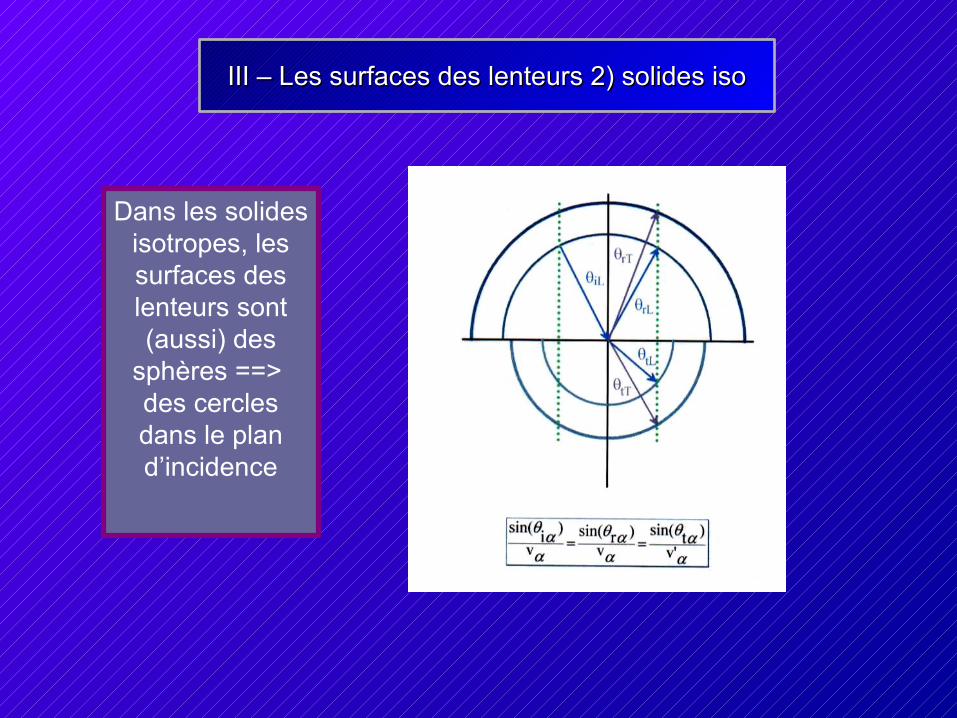
III – Les surfaces des lenteurs 2) solides isoIII – Les surfaces des lenteurs 2) solides iso
Dans les solides isotropes, les surfaces des lenteurs sont (aussi) des
sphères ==> des cercles dans le plan d’incidence
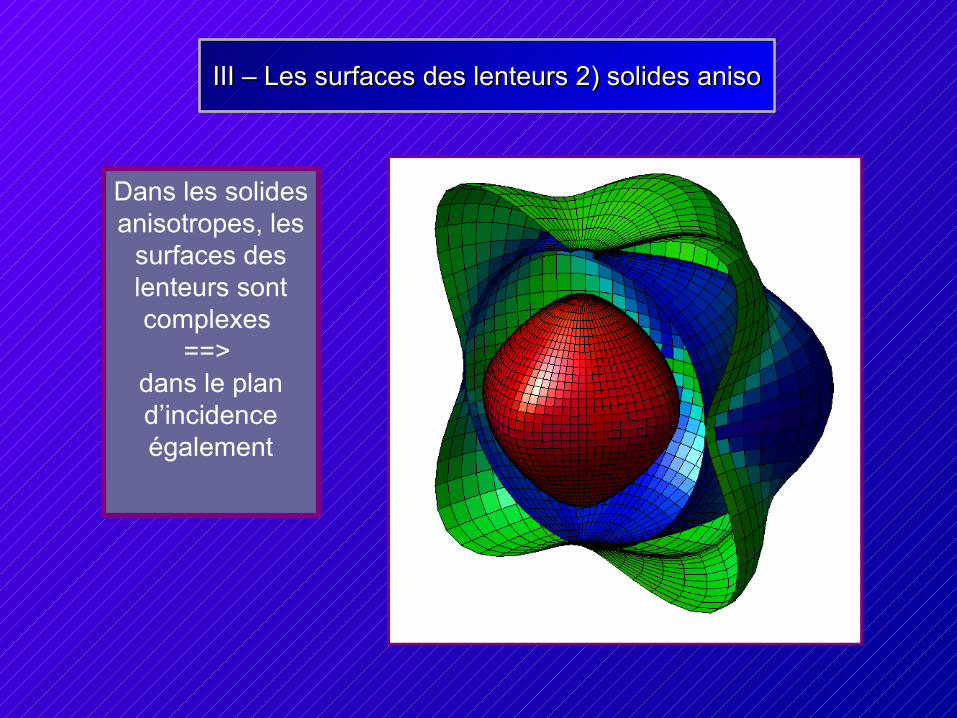
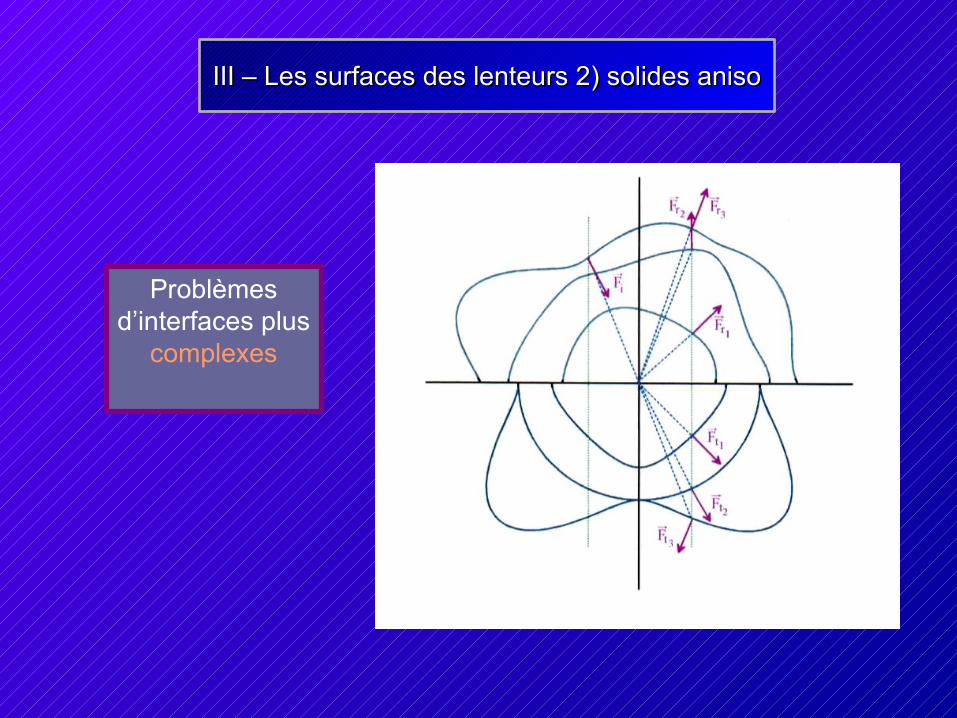
III – Les surfaces des lenteurs 2) solides anisoIII – Les surfaces des lenteurs 2) solides aniso
Dans les solides anisotropes, les
surfaces des lenteurs sont complexes
==> dans le plan d’incidence également
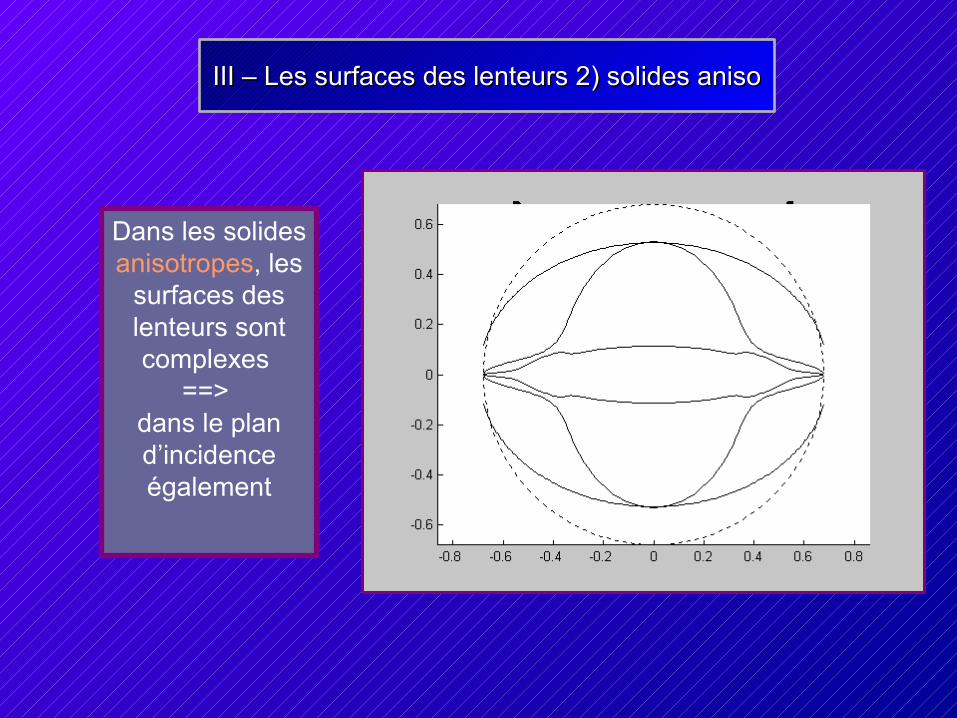
III – Les surfaces des lenteurs 2) solides anisoIII – Les surfaces des lenteurs 2) solides aniso
Dans les solides anisotropes, les
surfaces des lenteurs sont complexes
==> dans le plan d’incidence également
III – Les surfaces des lenteurs 2) solides anisoIII – Les surfaces des lenteurs 2) solides aniso
Problèmes d’interfaces plus
complexes
IV – Spécificités du contrôle par USIV – Spécificités du contrôle par US
Plusieurs caractéristiques sont à prendre en compte lors d’un contrôle de CND
•couplage mécanique de la sonde avec la pièce à contrôler
•conversion de modes éventuels aux interfaces
•atténuation du milieu à considérer
•diffraction du faisceau d’US
•diffusion des ondes dans le matériau
IV – Spécificités CND US 1) couplantIV – Spécificités CND US 1) couplant
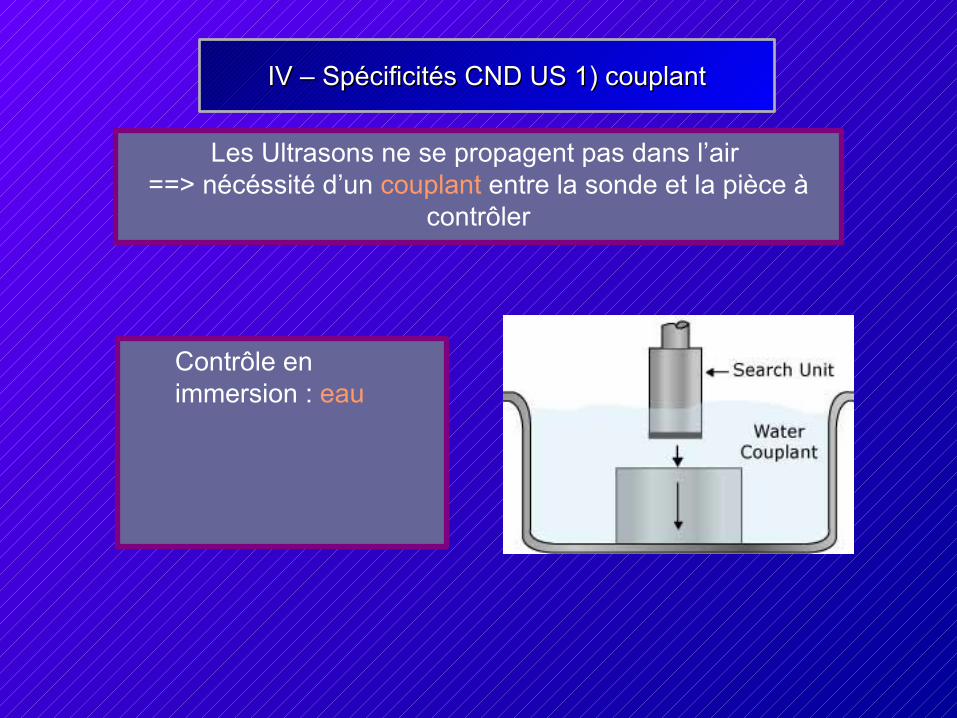
Les Ultrasons ne se propagent pas dans l’air ==> nécéssité d’un couplant entre la sonde et la pièce à
contrôler
Contrôle en immersion : eau
IV – Spécificités CND US 1) couplantIV – Spécificités CND US 1) couplant
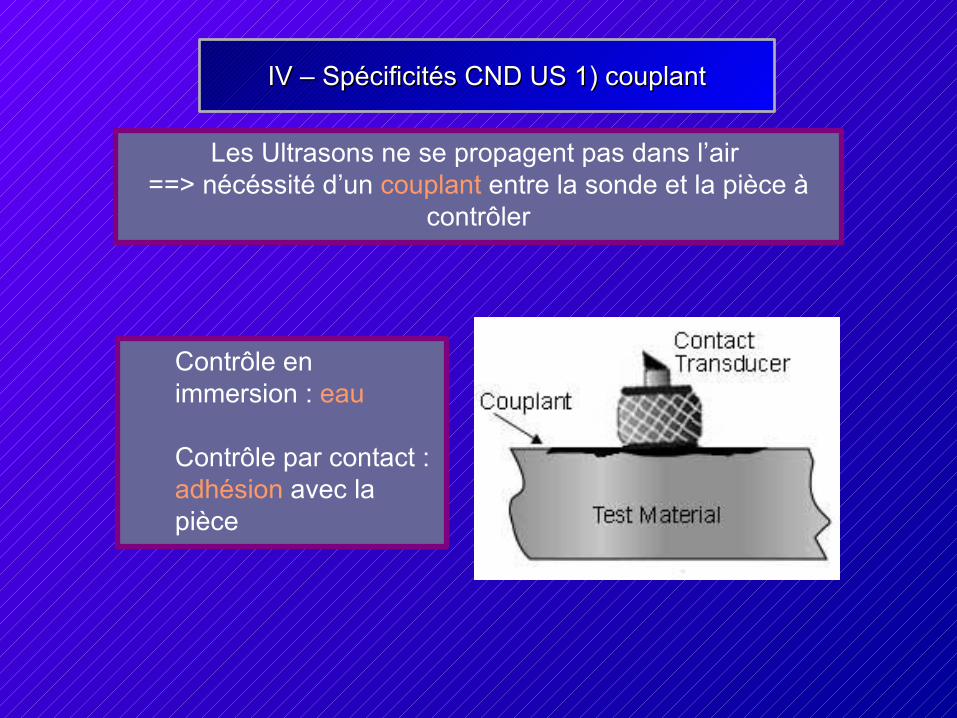
Les Ultrasons ne se propagent pas dans l’air ==> nécéssité d’un couplant entre la sonde et la pièce à
contrôler
Contrôle en immersion : eau
Contrôle par contact : adhésion avec la pièce
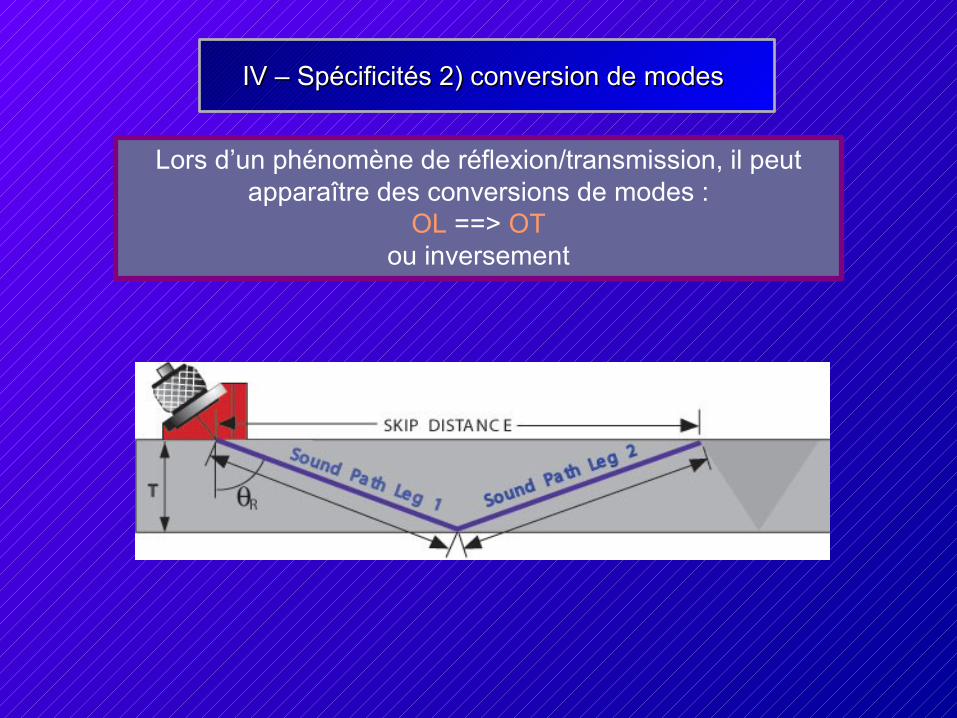
IV – Spécificités 2) conversion de modes IV – Spécificités 2) conversion de modes
Lors d’un phénomène de réflexion/transmission, il peut apparaître des conversions de modes :
OL ==> OTou inversement
IV – Spécificités 3) atténuationIV – Spécificités 3) atténuation
Au cours de sa propagation, le signal est, en général, soumis à une atténuation de son amplitude
sur une distance d, l'amplitude diminue d'un facteur b :a1=ba0
Si l'épaisseur double : a2=ba1=b2a0
on a une progression géométrique de l'amplitude==> donc une loi exponentielle :pour une épaisseur xd : a(x)=bxa0
comme bx=exp(xLn(b))=10xlog(b)
==> a(x)=a0exp(xLn(b))
IV – Spécificités 3) atténuationIV – Spécificités 3) atténuation
Au cours de sa propagation, le signal est, en général, soumis à une atténuation de son amplitude
En général, on exprimera souvent l'atténuation par des coefficients dépendant de b :
α = - Ln(b) ou β = -20 log(b)
==> a(x) = a0 e-αx = a0 10-(β/20)x
α s'exprime en N/m ou N/cm et β en dB/m ou dB/cm
IV – Spécificités 3) atténuationIV – Spécificités 3) atténuation
Au cours de sa propagation, le signal est, en général, soumis à une atténuation de son amplitude
On aura donc :
αx = Ln(a0/a(x)) et βx= 20 log(a0/a(x))
β (en dB) = 8.68 α (en N)
IV – Spécificités 3) atténuationIV – Spécificités 3) atténuation
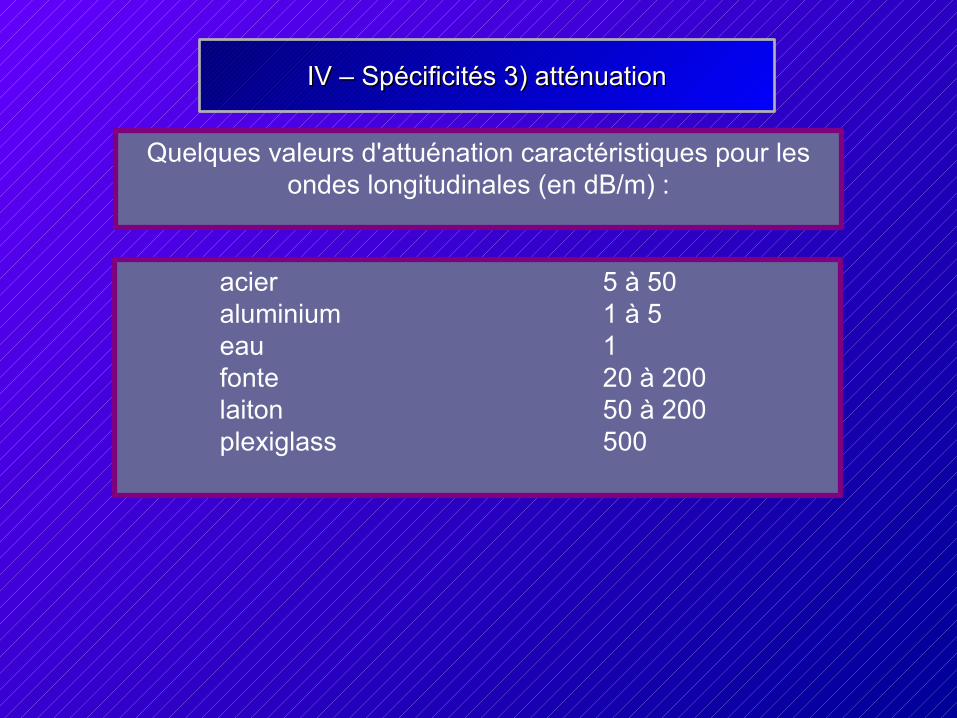
Quelques valeurs d'attuénation caractéristiques pour les ondes longitudinales (en dB/m) :
acier 5 à 50aluminium 1 à 5eau 1fonte 20 à 200laiton 50 à 200plexiglass 500