Embed Size (px)
Citation preview
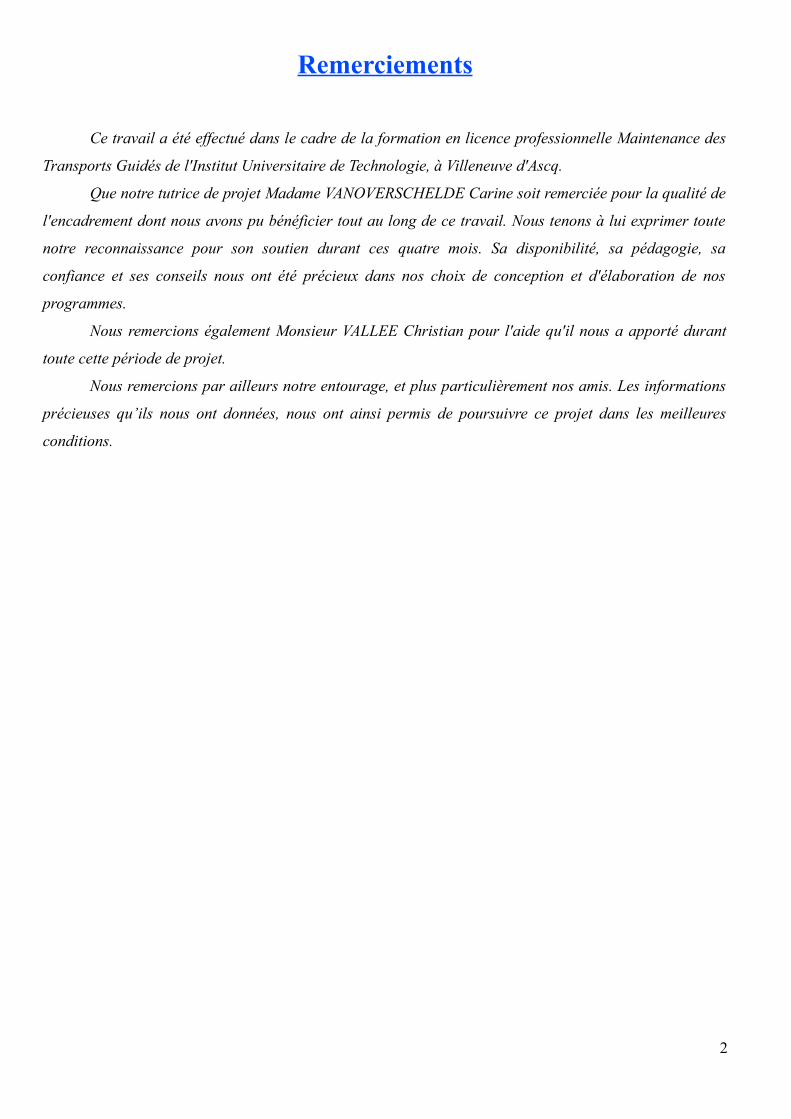
Rapport de projet tuteuré
Détermination, installation et essais d'un capteur de vitesse sur un karting électrique.
par : Damien JOLY Maxime LECUYER
Tutrice : Mme VANOVERSCHELDE Carine
Année Scolaire 2010/2011
IUT 'A' – Licence Pro MTGBd Paul Langevin – BP 179
59653 Villeneuve d'Ascq Cedex
1
Remerciements
Ce travail a été effectué dans le cadre de la formation en licence professionnelle Maintenance des
Transports Guidés de l'Institut Universitaire de Technologie, à Villeneuve d'Ascq.
Que notre tutrice de projet Madame VANOVERSCHELDE Carine soit remerciée pour la qualité de
l'encadrement dont nous avons pu bénéficier tout au long de ce travail. Nous tenons à lui exprimer toute
notre reconnaissance pour son soutien durant ces quatre mois. Sa disponibilité, sa pédagogie, sa
confiance et ses conseils nous ont été précieux dans nos choix de conception et d'élaboration de nos
programmes.
Nous remercions également Monsieur VALLEE Christian pour l'aide qu'il nous a apporté durant
toute cette période de projet.
Nous remercions par ailleurs notre entourage, et plus particulièrement nos amis. Les informations
précieuses qu’ils nous ont données, nous ont ainsi permis de poursuivre ce projet dans les meilleures
conditions.
2
Table des matières
Remerciements............................................................................................................................................2
Table des matières.....................................................................................................................................3
Introduction.................................................................................................................................................4
L'échéancier du projet..............................................................................................................................5
Les différents types de capteurs...........................................................................................................6
Présentation du capteur retenu pour le projet..................................................................................10
I – Caractéristiques techniques et principe de fonctionnement................................................................10II – Réalisation d'un schéma électronique................................................................................................11III – Essais du photo interrupteur sur plaque d'essai 730 contacts...........................................................13
Circuit imprimé (sur plaque à pastilles) et installation.....................................................................14
I – Réalisation du circuit imprimé............................................................................................................14II – Installation de la carte et test sur le karting........................................................................................15III – Réalisation du schéma électronique grâce au logiciel Kicad............................................................16
Difficultés rencontrées au cours du projet.......................................................................................17
Bilan et avenir sur notre projet.............................................................................................................18
Bibliographie...............................................................................................................................................19
3
Introduction
Dans le cadre de notre préparation à la licence professionnelle Maintenance des Systèmes Pluri-Techniques, spécialité Maintenance des Transports Guidés, les étudiants sont amenés à choisir et à effectuer un projet proposé par les enseignants de l'IUT (Institut Universitaire de Technologie).
Nous avons ainsi choisi le projet « Détermination, installation et essais d'un capteur de vitesse sur un karting électrique » tuteuré par Mme VANOVERSCHELDE Carine, professeur d'électronique. Le karting électrique a l'avantage d'être un support pédagogique pluritechnologique.
Le véhicule électrique est un sujet d’actualité dans notre société soucieuse d’écologie et de réduction de la pollution. Les membres du groupe de projet sont titulaires soit d'un Diplôme Universitaire de Technologie Génie Électrique et Informatique Industrielle, soit d'un Brevet de Technicien Supérieur Électrotechnique. Ainsi, le karting électrique est un support pédagogique qui intéresse notamment les filières de formation du Génie Électrique. Cet ensemble technique offre des perspectives d'utilisation dans des domaines aussi variés que la mécanique, l'électrotechnique, l'électronique.
Le cahier des charges est le suivant :
Notre tutrice nous a demandé d'offrir la possibilité au conducteur du karting électrique, de visualiser la vitesse instantanée du véhicule. Cela nous impose de prendre en compte toutes les solutions techniques envisageables en fonction des exigences et des contraintes qui nous ont été imposées.Le pilote du karting doit pouvoir être informé à tout moment de la vitesse de son véhicule.L'affichage doit se situer de telle sorte que la vitesse soit la plus lisible possible par le conducteur.
Plusieurs caractéristiques sont primordiales pour débuter ce projet notamment le diamètre de la roue : 260 millimètres (plat de la roue compris), le diamètre de l'arbre (axe) arrière : 50 millimètres, la vitesse maximale du karting : 60 km/h.
Cependant, il a fallu s'adapter aux installations déjà existantes sur le châssis du véhicule et prendre en compte certaines contraintes imposées par notre tutrice.Premièrement, l'arbre de traction arrière ne doit pas subir de modifications : l'usinage, l'extraction de matière ainsi que la soudure sont des procédés à bannir. Ensuite, la solution technique envisagée doit résister à toute projection de matière (ou d'eau) qui pourrait être présente sur la piste où circule le véhicule. Il faut également que le coût de cette solution soit le plus faible possible. Enfin, notre solution technique retenue doit être en adéquation avec les autres sous-projets en liaison avec le karting électrique (exemple : mise en place d'un composant électronique de type PIC permettant ainsi la centralisation des données et l'accueil de l'ensemble des cartes électroniques secondaires).
Dans un premier temps, nous avons étudié les différents types de capteurs existants sur le marché susceptibles de convenir pour la réalisation de notre projet. Nous mettrons ainsi en évidence les avantages et les inconvénients de chacun d'entre-eux pour être en adéquation avec le cahier des charges.
4
L'échéancier du projet
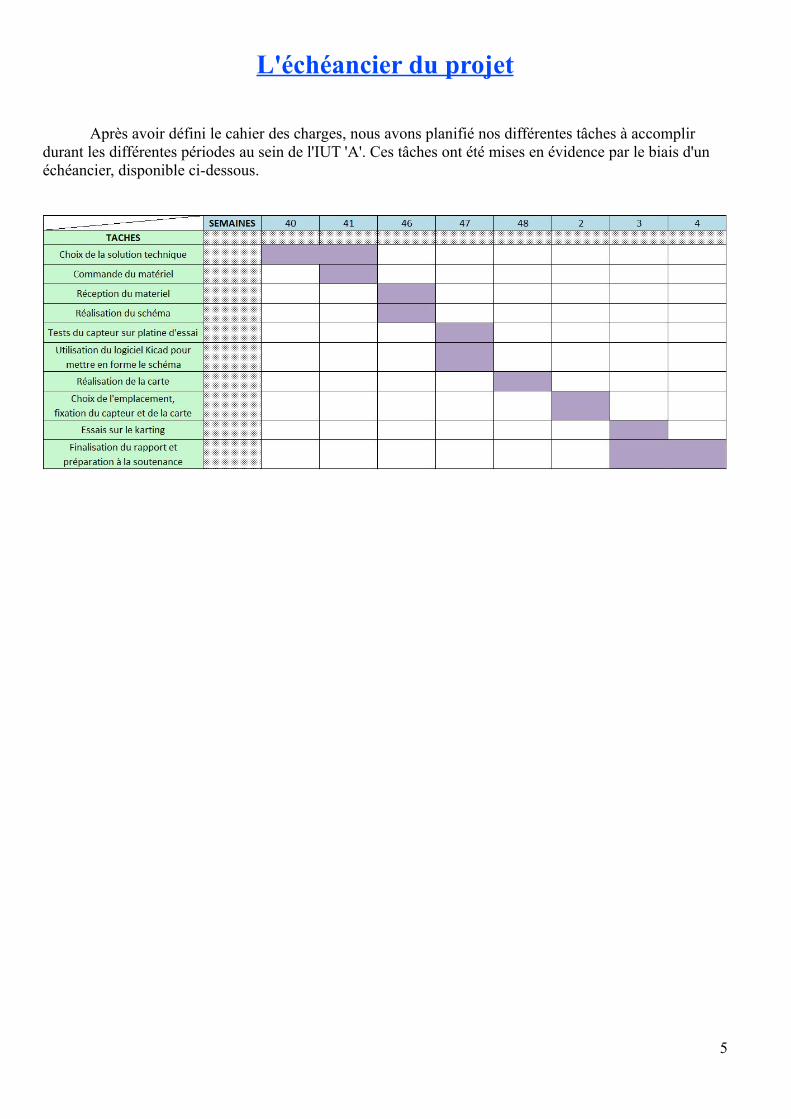
Après avoir défini le cahier des charges, nous avons planifié nos différentes tâches à accomplir durant les différentes périodes au sein de l'IUT 'A'. Ces tâches ont été mises en évidence par le biais d'un échéancier, disponible ci-dessous.
5
Les différents types de capteurs
Suites aux recherches approfondies, nous comptabilisons cinq procédés de captation.
➢ Les capteurs mécaniques.
Ils nous imposent un contact entre la pièce à détecter et le capteur.Il existe différents types de capteurs mécaniques :
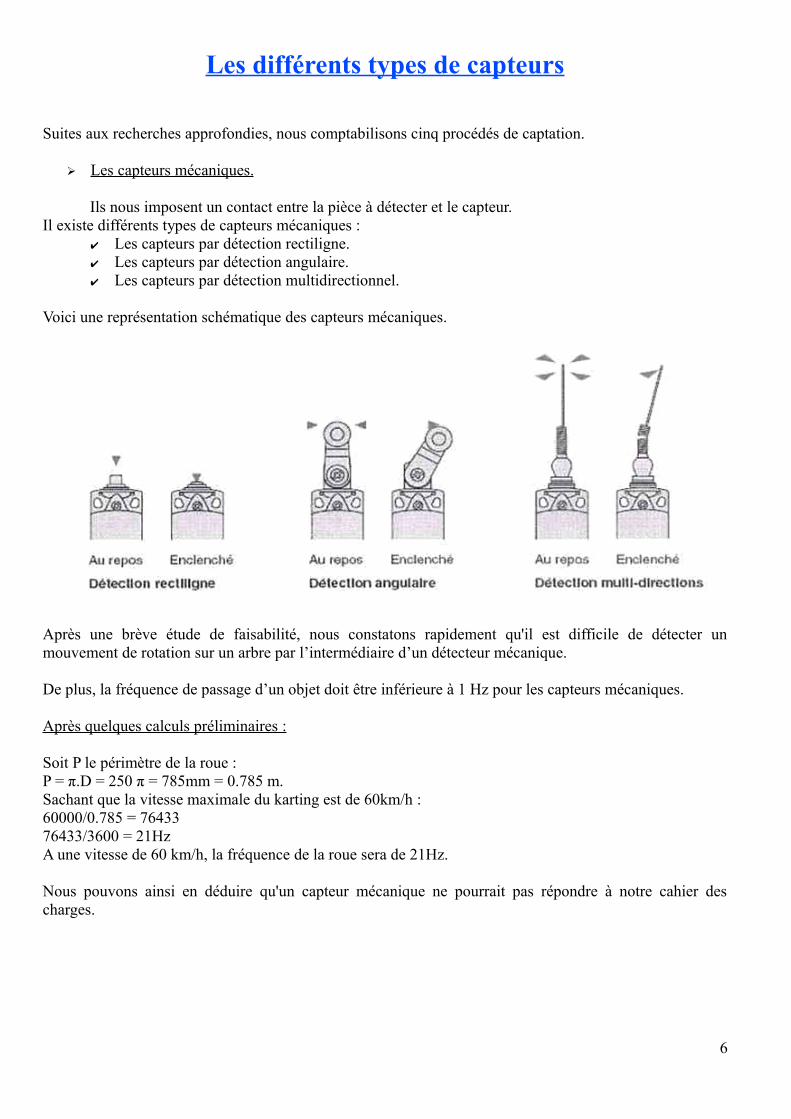
✔ Les capteurs par détection rectiligne.✔ Les capteurs par détection angulaire.✔ Les capteurs par détection multidirectionnel.
Voici une représentation schématique des capteurs mécaniques.
Après une brève étude de faisabilité, nous constatons rapidement qu'il est difficile de détecter un mouvement de rotation sur un arbre par l’intermédiaire d’un détecteur mécanique.
De plus, la fréquence de passage d’un objet doit être inférieure à 1 Hz pour les capteurs mécaniques.
Après quelques calculs préliminaires :
Soit P le périmètre de la roue :P = π.D = 250 π = 785mm = 0.785 m.Sachant que la vitesse maximale du karting est de 60km/h :60000/0.785 = 7643376433/3600 = 21HzA une vitesse de 60 km/h, la fréquence de la roue sera de 21Hz.
Nous pouvons ainsi en déduire qu'un capteur mécanique ne pourrait pas répondre à notre cahier des charges.
6
➢ Les capteurs inductifs.
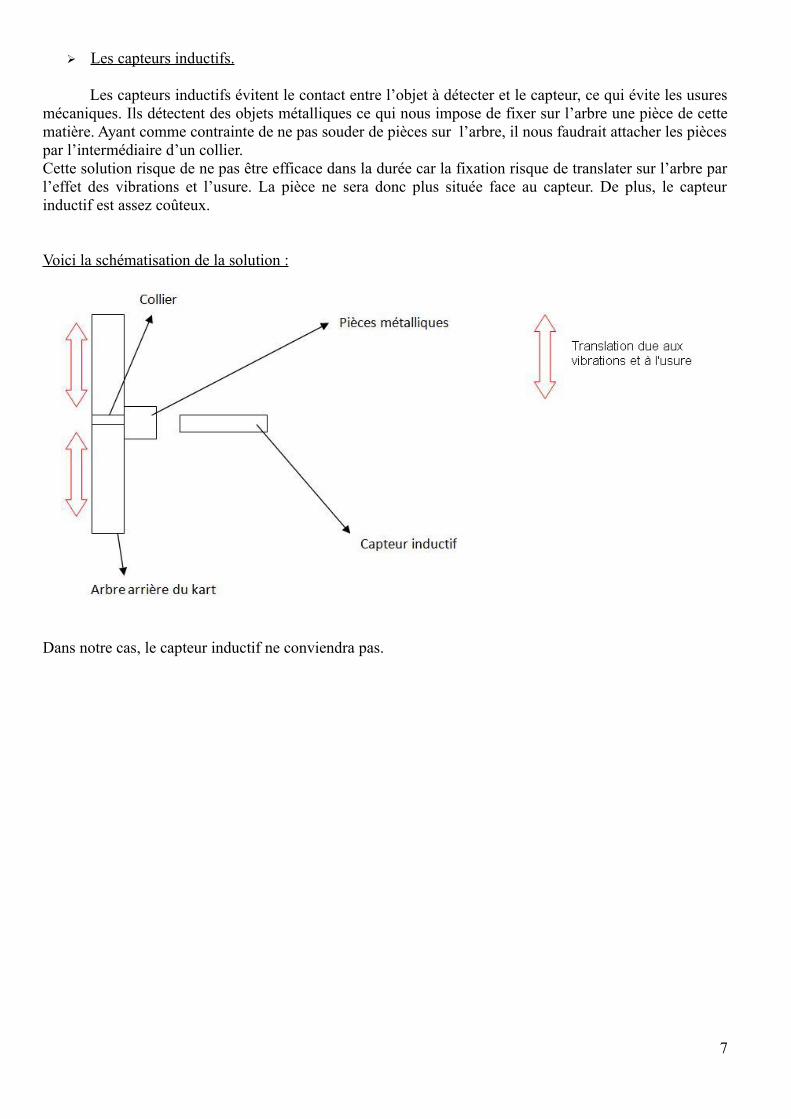
Les capteurs inductifs évitent le contact entre l’objet à détecter et le capteur, ce qui évite les usures mécaniques. Ils détectent des objets métalliques ce qui nous impose de fixer sur l’arbre une pièce de cette matière. Ayant comme contrainte de ne pas souder de pièces sur l’arbre, il nous faudrait attacher les pièces par l’intermédiaire d’un collier. Cette solution risque de ne pas être efficace dans la durée car la fixation risque de translater sur l’arbre par l’effet des vibrations et l’usure. La pièce ne sera donc plus située face au capteur. De plus, le capteur inductif est assez coûteux.
Voici la schématisation de la solution :
Dans notre cas, le capteur inductif ne conviendra pas.
7
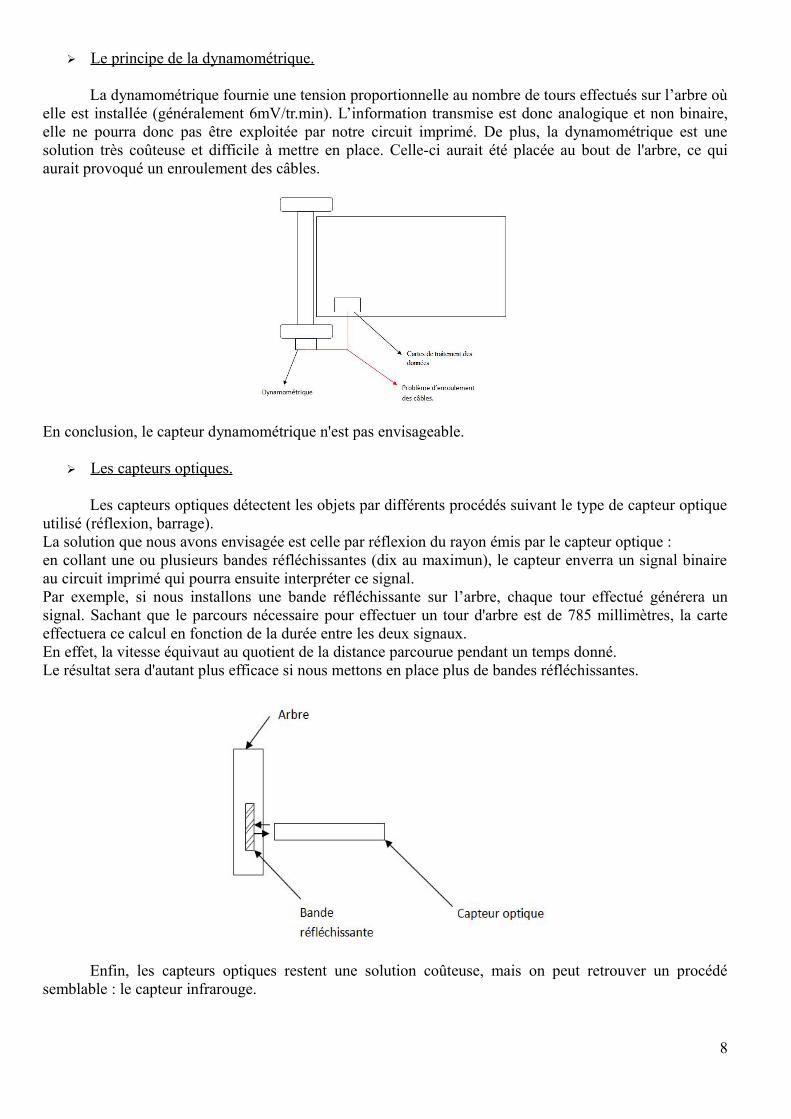
➢ Le principe de la dynamométrique.
La dynamométrique fournie une tension proportionnelle au nombre de tours effectués sur l’arbre où elle est installée (généralement 6mV/tr.min). L’information transmise est donc analogique et non binaire, elle ne pourra donc pas être exploitée par notre circuit imprimé. De plus, la dynamométrique est une solution très coûteuse et difficile à mettre en place. Celle-ci aurait été placée au bout de l'arbre, ce qui aurait provoqué un enroulement des câbles.
En conclusion, le capteur dynamométrique n'est pas envisageable.
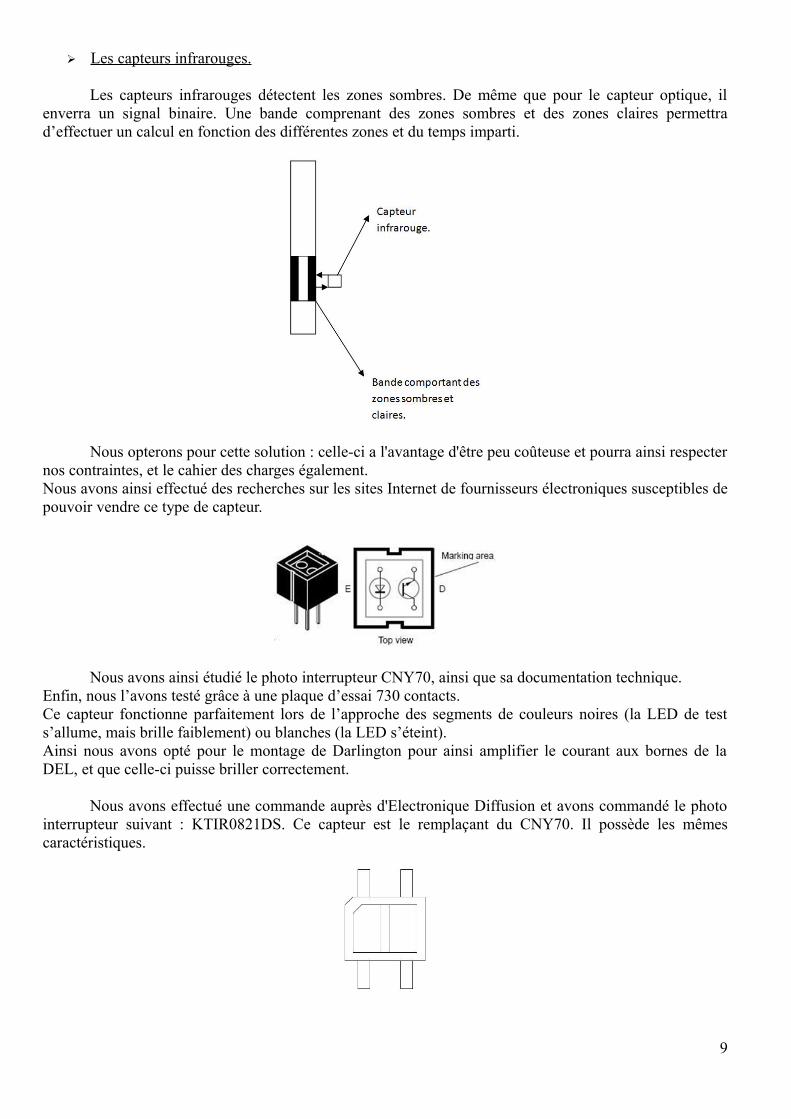
➢ Les capteurs optiques.
Les capteurs optiques détectent les objets par différents procédés suivant le type de capteur optique utilisé (réflexion, barrage).La solution que nous avons envisagée est celle par réflexion du rayon émis par le capteur optique :en collant une ou plusieurs bandes réfléchissantes (dix au maximun), le capteur enverra un signal binaire au circuit imprimé qui pourra ensuite interpréter ce signal.Par exemple, si nous installons une bande réfléchissante sur l’arbre, chaque tour effectué générera un signal. Sachant que le parcours nécessaire pour effectuer un tour d'arbre est de 785 millimètres, la carte effectuera ce calcul en fonction de la durée entre les deux signaux.En effet, la vitesse équivaut au quotient de la distance parcourue pendant un temps donné.Le résultat sera d'autant plus efficace si nous mettons en place plus de bandes réfléchissantes.
Enfin, les capteurs optiques restent une solution coûteuse, mais on peut retrouver un procédé semblable : le capteur infrarouge.
8
➢ Les capteurs infrarouges.
Les capteurs infrarouges détectent les zones sombres. De même que pour le capteur optique, il enverra un signal binaire. Une bande comprenant des zones sombres et des zones claires permettra d’effectuer un calcul en fonction des différentes zones et du temps imparti.
Nous opterons pour cette solution : celle-ci a l'avantage d'être peu coûteuse et pourra ainsi respecter nos contraintes, et le cahier des charges également.Nous avons ainsi effectué des recherches sur les sites Internet de fournisseurs électroniques susceptibles de pouvoir vendre ce type de capteur.
Nous avons ainsi étudié le photo interrupteur CNY70, ainsi que sa documentation technique.Enfin, nous l’avons testé grâce à une plaque d’essai 730 contacts.Ce capteur fonctionne parfaitement lors de l’approche des segments de couleurs noires (la LED de test s’allume, mais brille faiblement) ou blanches (la LED s’éteint).Ainsi nous avons opté pour le montage de Darlington pour ainsi amplifier le courant aux bornes de la DEL, et que celle-ci puisse briller correctement.
Nous avons effectué une commande auprès d'Electronique Diffusion et avons commandé le photo interrupteur suivant : KTIR0821DS. Ce capteur est le remplaçant du CNY70. Il possède les mêmes caractéristiques.
9
Présentation du capteur retenu pour le projet
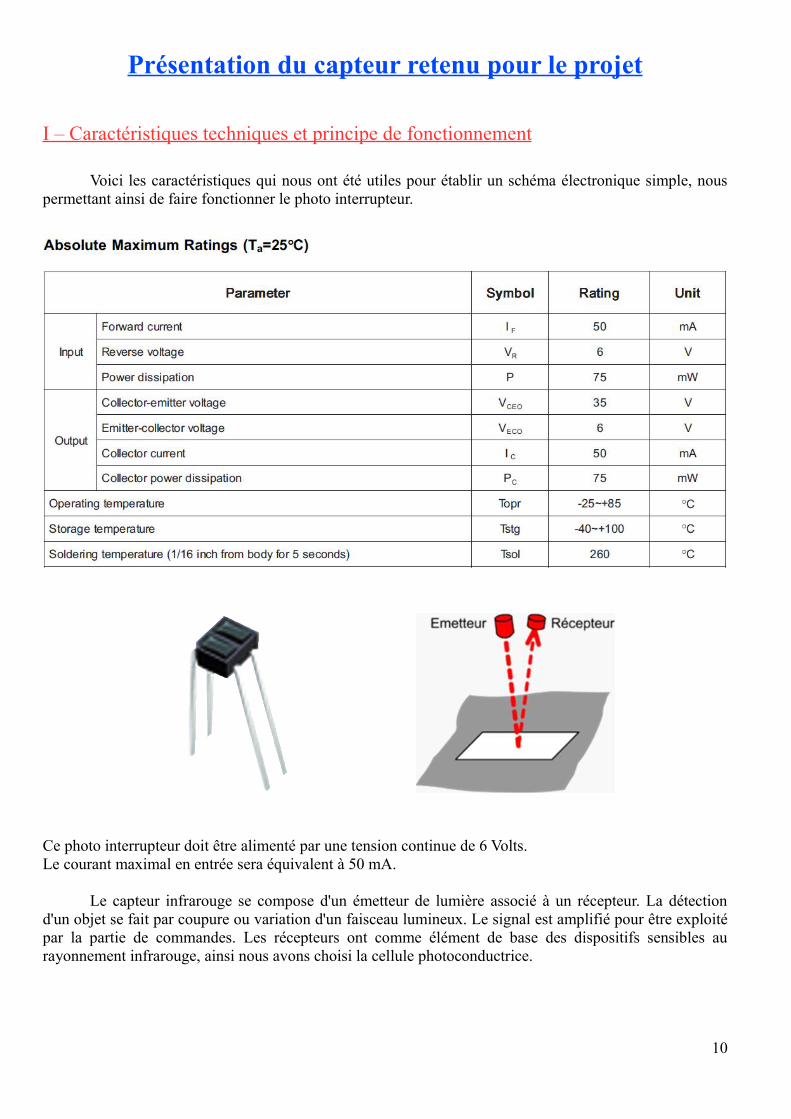
I – Caractéristiques techniques et principe de fonctionnement
Voici les caractéristiques qui nous ont été utiles pour établir un schéma électronique simple, nous permettant ainsi de faire fonctionner le photo interrupteur.
Ce photo interrupteur doit être alimenté par une tension continue de 6 Volts.Le courant maximal en entrée sera équivalent à 50 mA.
Le capteur infrarouge se compose d'un émetteur de lumière associé à un récepteur. La détection d'un objet se fait par coupure ou variation d'un faisceau lumineux. Le signal est amplifié pour être exploité par la partie de commandes. Les récepteurs ont comme élément de base des dispositifs sensibles au rayonnement infrarouge, ainsi nous avons choisi la cellule photoconductrice.
10
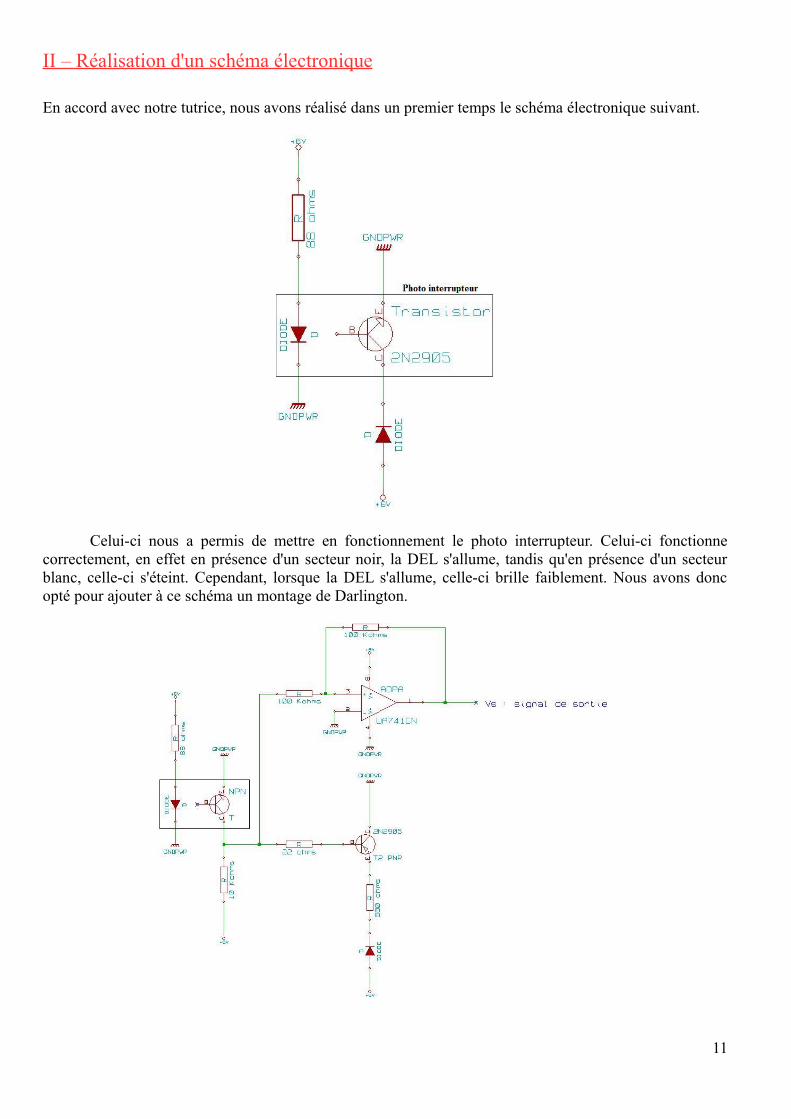
II – Réalisation d'un schéma électronique
En accord avec notre tutrice, nous avons réalisé dans un premier temps le schéma électronique suivant.
Celui-ci nous a permis de mettre en fonctionnement le photo interrupteur. Celui-ci fonctionne correctement, en effet en présence d'un secteur noir, la DEL s'allume, tandis qu'en présence d'un secteur blanc, celle-ci s'éteint. Cependant, lorsque la DEL s'allume, celle-ci brille faiblement. Nous avons donc opté pour ajouter à ce schéma un montage de Darlington.
11
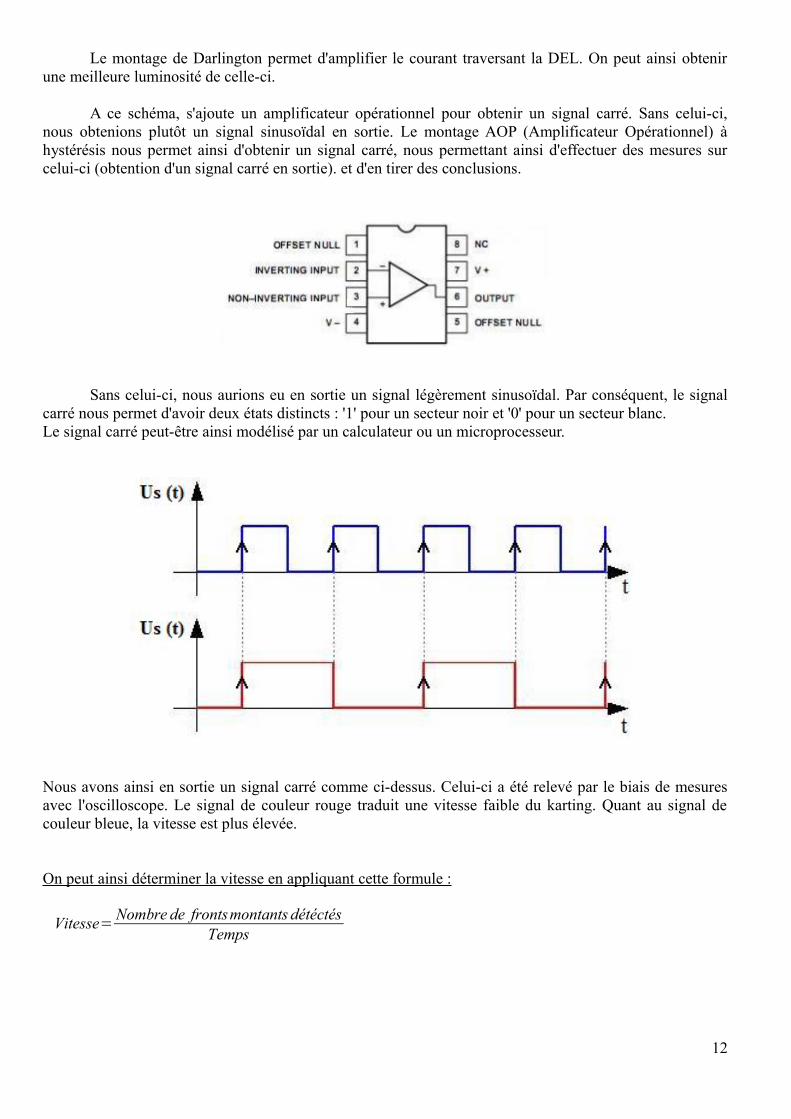
Le montage de Darlington permet d'amplifier le courant traversant la DEL. On peut ainsi obtenir une meilleure luminosité de celle-ci.
A ce schéma, s'ajoute un amplificateur opérationnel pour obtenir un signal carré. Sans celui-ci, nous obtenions plutôt un signal sinusoïdal en sortie. Le montage AOP (Amplificateur Opérationnel) à hystérésis nous permet ainsi d'obtenir un signal carré, nous permettant ainsi d'effectuer des mesures sur celui-ci (obtention d'un signal carré en sortie). et d'en tirer des conclusions.
Sans celui-ci, nous aurions eu en sortie un signal légèrement sinusoïdal. Par conséquent, le signal carré nous permet d'avoir deux états distincts : '1' pour un secteur noir et '0' pour un secteur blanc.Le signal carré peut-être ainsi modélisé par un calculateur ou un microprocesseur.
Nous avons ainsi en sortie un signal carré comme ci-dessus. Celui-ci a été relevé par le biais de mesures avec l'oscilloscope. Le signal de couleur rouge traduit une vitesse faible du karting. Quant au signal de couleur bleue, la vitesse est plus élevée.
On peut ainsi déterminer la vitesse en appliquant cette formule :
Vitesse= Nombre de frontsmontants détéctésTemps
12
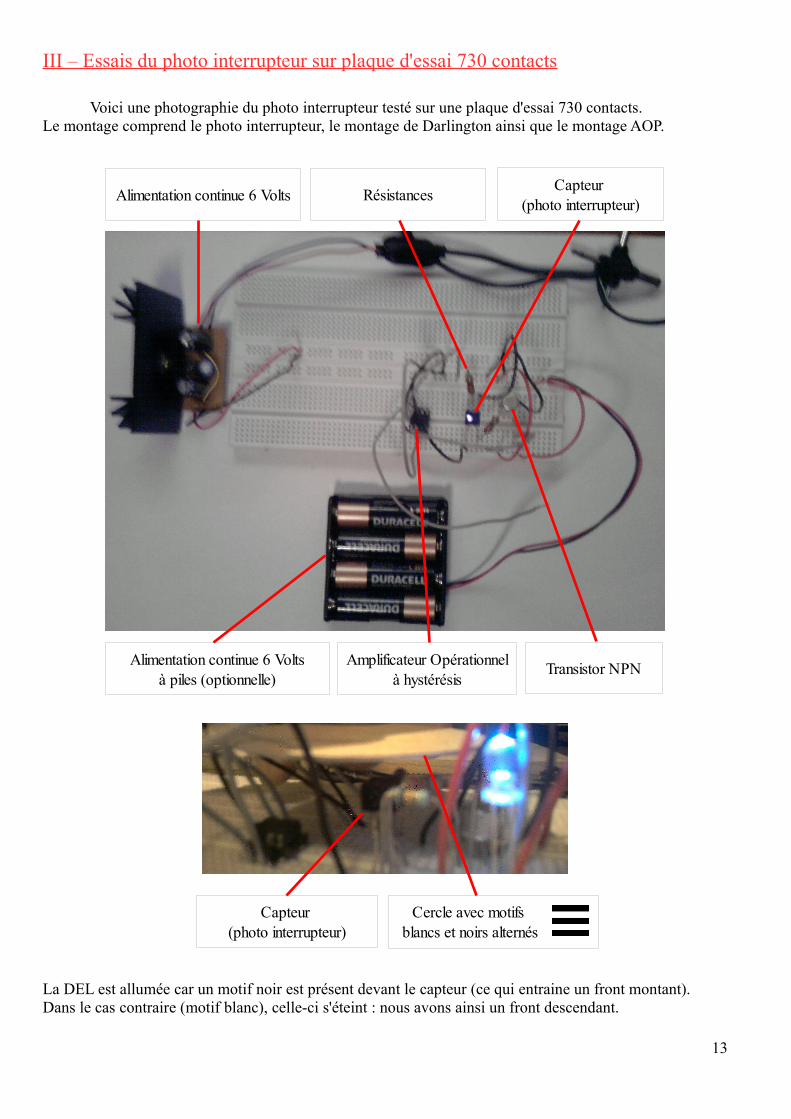
III – Essais du photo interrupteur sur plaque d'essai 730 contacts
Voici une photographie du photo interrupteur testé sur une plaque d'essai 730 contacts.Le montage comprend le photo interrupteur, le montage de Darlington ainsi que le montage AOP.
La DEL est allumée car un motif noir est présent devant le capteur (ce qui entraine un front montant).Dans le cas contraire (motif blanc), celle-ci s'éteint : nous avons ainsi un front descendant.
13
Capteur (photo interrupteur)
Alimentation continue 6 Voltsà piles (optionnelle)
Amplificateur Opérationnelà hystérésis
Transistor NPN
RésistancesAlimentation continue 6 Volts
Capteur (photo interrupteur)
Cercle avec motifs blancs et noirs alternés
Circuit imprimé (sur plaque à pastilles) et installation
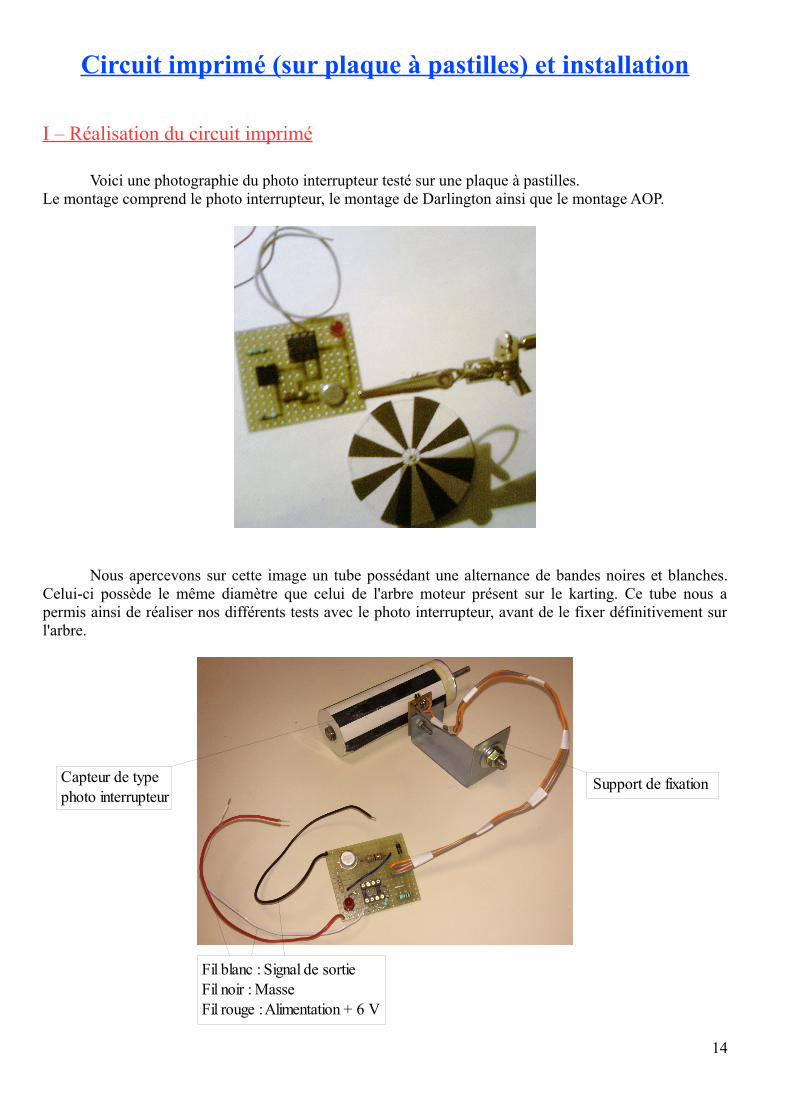
I – Réalisation du circuit imprimé
Voici une photographie du photo interrupteur testé sur une plaque à pastilles.Le montage comprend le photo interrupteur, le montage de Darlington ainsi que le montage AOP.
Nous apercevons sur cette image un tube possédant une alternance de bandes noires et blanches. Celui-ci possède le même diamètre que celui de l'arbre moteur présent sur le karting. Ce tube nous a permis ainsi de réaliser nos différents tests avec le photo interrupteur, avant de le fixer définitivement sur l'arbre.
14
Fil blanc : Signal de sortieFil noir : MasseFil rouge : Alimentation + 6 V
Capteur de type photo interrupteur
Support de fixation

II – Installation de la carte et test sur le karting
Nous avons décidé de réaliser une carte principale. Cette carte comprend l'ensemble du montage et sera protégée lors de son installation. Nous avons placé le photo interrupteur sur une carte annexe qui sera positionnée à l'emplacement mentionné sur la photographie ci-dessous.
Voici une photographie du montage complet installé sur le karting :
15
Emplacement pour la fixation de la carte annexe où se trouve le photo interrupteur
Anneau situé sur l'arbre où bandes blanches et noires seront alternées
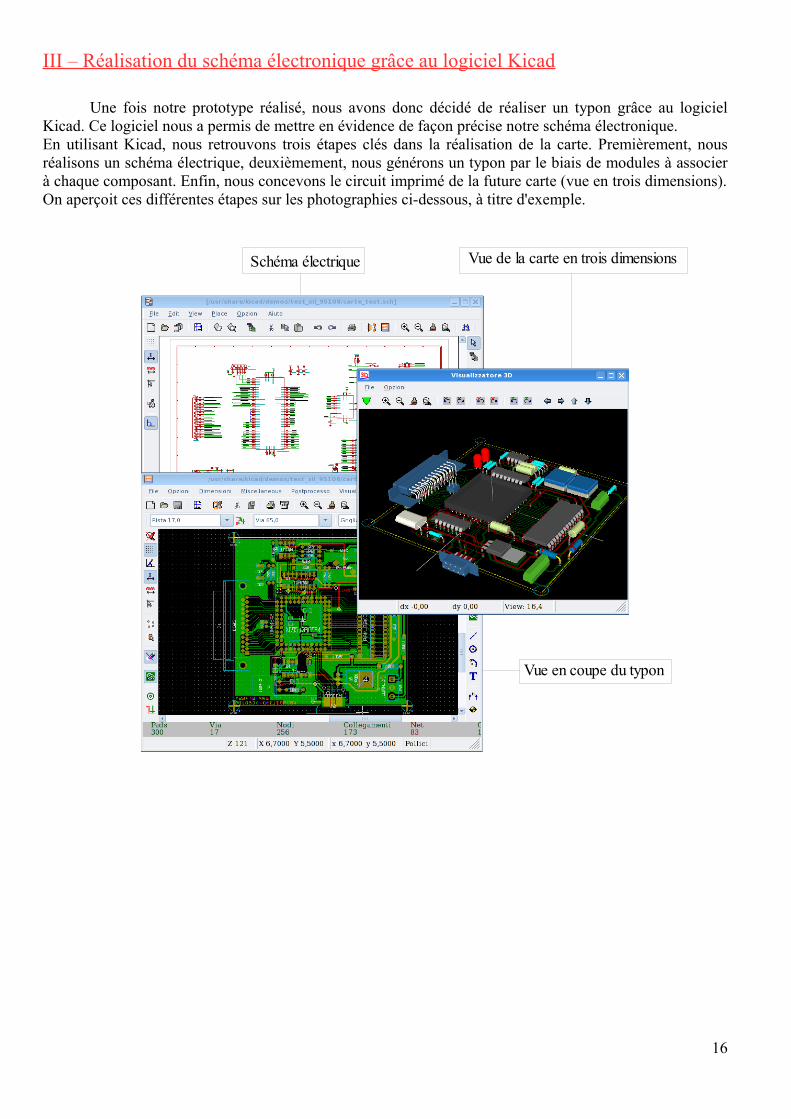
III – Réalisation du schéma électronique grâce au logiciel Kicad
Une fois notre prototype réalisé, nous avons donc décidé de réaliser un typon grâce au logiciel Kicad. Ce logiciel nous a permis de mettre en évidence de façon précise notre schéma électronique.En utilisant Kicad, nous retrouvons trois étapes clés dans la réalisation de la carte. Premièrement, nous réalisons un schéma électrique, deuxièmement, nous générons un typon par le biais de modules à associer à chaque composant. Enfin, nous concevons le circuit imprimé de la future carte (vue en trois dimensions). On aperçoit ces différentes étapes sur les photographies ci-dessous, à titre d'exemple.
16
Schéma électrique Vue de la carte en trois dimensions
Vue en coupe du typon
Difficultés rencontrées au cours du projet
La première difficulté majeure rencontrée lors de ce projet concernait le choix de la solution technique permettant de réaliser le capteur de vitesse. En effet, plusieurs solutions étaient possibles. Il a donc été difficile de trouver un compromis entre toutes ces solutions.
Dans notre premier montage (montage d'essai), nous avons observé une faible luminosité générée par la diode due à une sous-alimentation. Nous avons donc pris un temps certain pour déterminer la cause du problème. Le montage de Darlington nous a paru une solution adaptée pour palier à ce problème.
Ensuite, pour que les signaux générés par notre capteur de vitesse soient exploités par le biais d'une carte électronique, ils doivent être d'allures carrées. Or, le montage que nous avions mis en œuvre nous délivrait d'après les tests un signal quasi sinusoïdal. Nous avons donc trouvé une solution pour palier à ce soucis. Cette solution consiste à mettre en place un montage AOP (Amplificateur Opérationnel).
Durant notre projet, nous nous sommes imposés des objectifs. Ces objectifs ont été suivi. Enfin, nous avions établi un planning prévisionnel pour travailler de façon structurée.
Durant le déroulement du projet, nous avons rencontré plusieurs difficultés.Faire face à ces difficultés nous a permis d'en savoir plus sur les deux principaux domaines traités par notre projet, à savoir l'électronique et la mécanique.
Nous sommes issus de deux formations différentes : l'un ayant comme formation principale l'électronique, l'autre membre ayant comme formation l'électrotechnique, Nous avons donc rencontré chacun des difficultés lorsque notre projet nous faisait aborder des domaines techniques, pas forcément en relation avec nos formations initiales. En outre, cela nous a permis d'associer nos compétences.
Enfin, ces difficultés rencontrées peuvent nous être utiles pour la réalisation de futurs travaux. Celles-ci pourront donc être appréhendées lors d'un autre projet.
17

Bilan et avenir sur notre projet
Nous avons choisi ce sujet car il est d'actualité, de plus, nous avions quelques pistes pour une ébauche de solution.
Comme nous avons pu le voir tout au long de notre étude, il n'est pas forcément évident d'installer un capteur de vitesse. Celui-ci est avant tout contraint à un cahier des charges très strict : notamment au niveau de la position du capteur sur l'arbre par exemple.
Ce projet a été un véritable échange entre nous, notamment au point de vue technique grâce à nos deux formations de domaines différents. En effet, tout en respectant les objectifs, ce projet nous a permis d'acquérir des connaissances supplémentaires. Celles-ci pourront éventuellement être utilisées durant notre carrière professionnelle.
Ce qui est intéressant, c'est que notre carte pourra par la suite être reliée à un calculateur ou à un microprocesseur par exemple. Notre schéma électrique reste disponible sous un format de fichier Kicad, des modifications éventuelles pourront être apportées si le besoin se fait sentir au moment de la liaison entre le microprocesseur et notre « montage capteur ». Le calculateur embarqué devra assurer l’affichage de la vitesse, de la température du hacheur et de l’état des batteries. Toutes ces informations sont transmises vers le poste fixe. On peut même imaginer recevoir d'autres informations (consignes de courant, arrêt à distance…). La transmission des données vers un poste fixe est gérée par un autre groupe de projet tuteuré.
Ce projet nous a permis de développer plusieurs qualités :• l'autonomie• la responsabilité• le travail en équipe• la communication.
Enfin, ce projet nous a permis de travailler en groupe et ainsi de nous répartir les différentes tâches. Cela nous rapproche un peu plus du monde professionnel.
18
Bibliographie
http://www.electronique-diffusion.fr/
http://www.electronique-diffusion.fr/advanced_search_result.php?osCsid=b4b379afc655d1963ef7172b038949a4&keywords=ktir
http://fr.wikipedia.org/wiki/Capteur_de_proximit%C3%A9
http://www.hellopro.fr/dynamo-tachymetrique-2004055-44014-produit.html
http://www.electronique-radioamateur.fr/elec/schema/montage-aop.php#trigger_schmitt
http://prof.guedon.org/spip.php?article21
Documents annexes :
➢ Documents techniques Schneider.
➢ Documentation technique Électronique Diffusion.
➢ Documentation issue des cours de BTS Électrotechnique.
➢ Documentation issue des cours de DUT Génie Électrique et Informatique Industrielle.
19