Embed Size (px)
Citation preview
1
Réduction Virtuelle des Fractures du Cotyle Hadrien Oliveri – Grenoble INP, ENSIMAG 2A, MMIS – Introduction à la Recherche en Laboratoire (fév. – mai 2014) Tuteur : Matthieu Chabanas – TIMC-IMAG (équipe Gestes Médico-Chirurgicaux Assistés par Ordinateur)
Laboratoire TIMC-IMAG Faculté de Médecine de Grenoble Pavillon Taillefer – 38706 La Tronche
1 INTRODUCTION
a réduction d’une fracture du cotyle12 (ou acétabulum), cavité articulaire du bassin accueillant la tête du fémur, représente une
épreuve de chirurgie orthopédique des plus complexes. En effet, la profondeur de l’os pelvien, sa proximité avec de nombreux éléments vasculo-nerveux critiques, et l’importante vascularisation des structures osseuses, exigent un planning pré-opératoire minutieusement étudié et une bonne compréhension de la fracture. Les chirurgiens orthopédiques-traumatologues du CHU de Grenoble ne disposent, actuellement, que d’images radiographiques (scanner notamment) et de quelques vues tridimensionnelles fixes. Dans ces conditions, la préparation chirurgicale nécessite un grand travail mental pour conceptualiser la fracture, la visibilité opératoire réelle étant très réduite.
L’enjeu principal est la précision. En effet, la marge d’erreur permise en termes de décalage inter-fragmentaire sur la surface acétabulaire a été établie à seulement deux millimètres. Cette précision est nécessaire pour assurer une bonne congruence articulaire et ainsi prévenir le développement d’arthrose post-traumatique grave, pouvant nécessiter à court terme la pose d’une prothèse de hanche. Du fait du risque infectieux, la minimisation de la durée opératoire représente également un enjeu important dans le succès de l’intervention. Le but de cette étude est donc d’améliorer le planning préopératoire pour satisfaire ces critères, en permettant notamment de déterminer la voie d’abord et la manière de mobiliser les fragments osseux.
L’objectif à terme est de développer une application informatique en vue d’assister le chirurgien orthopédique-traumatologue dans l’établissement de son planning pré-opératoire. Il s’agit non seulement d’améliorer sa connaissance visuelle de la fracture, à partir d’une reconstruction tridimensionnelle, mais surtout de lui fournir une interface virtuelle interactive pour déterminer pas à pas les déplacements osseux à effectuer en pratique. Par ailleurs l’application pourra fournir une méthode de préformation automatique des plaques chirurgicales utilisées
1 http://en.wikipedia.org/wiki/Acetabulum 2 Pour une cartographie 3D du corps humain : http://www.zygotebody.com/
L Figure 1 : Exemple de fracture multiple du pelvis au côté droit (image F. de Peretti – R. Bernard de Dompsure [7]).
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
2 Réduction Virtuelle des Fractures du Cotyle
pour maintenir la réduction après l’opération. Le cadre du module IRL concerne la validation d’une méthode de réduction et la réalisation d’une maquette, afin de préparer le terrain à un développement logiciel ultérieur.
2 ENVIRONNEMENT DE RECHERCHE
étude a été réalisée au laboratoire TIMC – IMAG3 (Technique de l’Ingénierie Médicale et de la Complexité – Informatique, Mathématiques et Applications - Grenoble) au sein de l’équipe GMCAO4 (Gestes Médico-
Chirurgicaux Assistés par Ordinateurs) sous la responsabilité de M. Matthieu Chabanas, chercheur au laboratoire TIMC-IMAG (GMCAO) et Maître de Conférence à l’ENSIMAG.
Le projet a été mené avec l’aide de M. Mehdi Boudissa, interne au service d’orthopédie-traumatologie du CHU de Grenoble. La préparation du travail de Recherche a été accompagnée notamment d’une démonstration des techniques opératoires sur pièce anatomique humaine, au Laboratoire d’Anatomie de Grenoble5 (LADAF), afin d’apprécier les difficultés et les enjeux pratiques de l’intervention. L’aide du corps médical ainsi que la démonstration chirurgicale présentée ont été nécessaires dans l’identification des objectifs, des contraintes réelles à respecter, des besoins du chirurgien, ainsi que pour notre propre conception du problème.
3 BESOIN CLINIQUE ET ETAT DE L’ART
e besoin exprimé par le personnel soignant du service d’orthopédie-traumatologie du CHU de Grenoble, comprend plusieurs points. Dans un premier temps, le chirurgien
souhaite pouvoir visualiser la fracture à partir d’une vue 3D complète. Il pourra alors mieux appréhender le type de la fracture6 et choisir la voie d’abord en conséquence. Il aimerait ensuite pouvoir manipuler les structures osseuses, par exemple en appariant à la souris des points qui devraient être normalement confondus ou voisins. Le simulateur doit alors rapprocher ces points (de manière simultanée ou non) pour réduire la fracture. Enfin, le chirurgien a besoin d’un modèle intuitif de préformage virtuel des plaques chirurgicales servant au bon maintien post-opératoire du bassin.
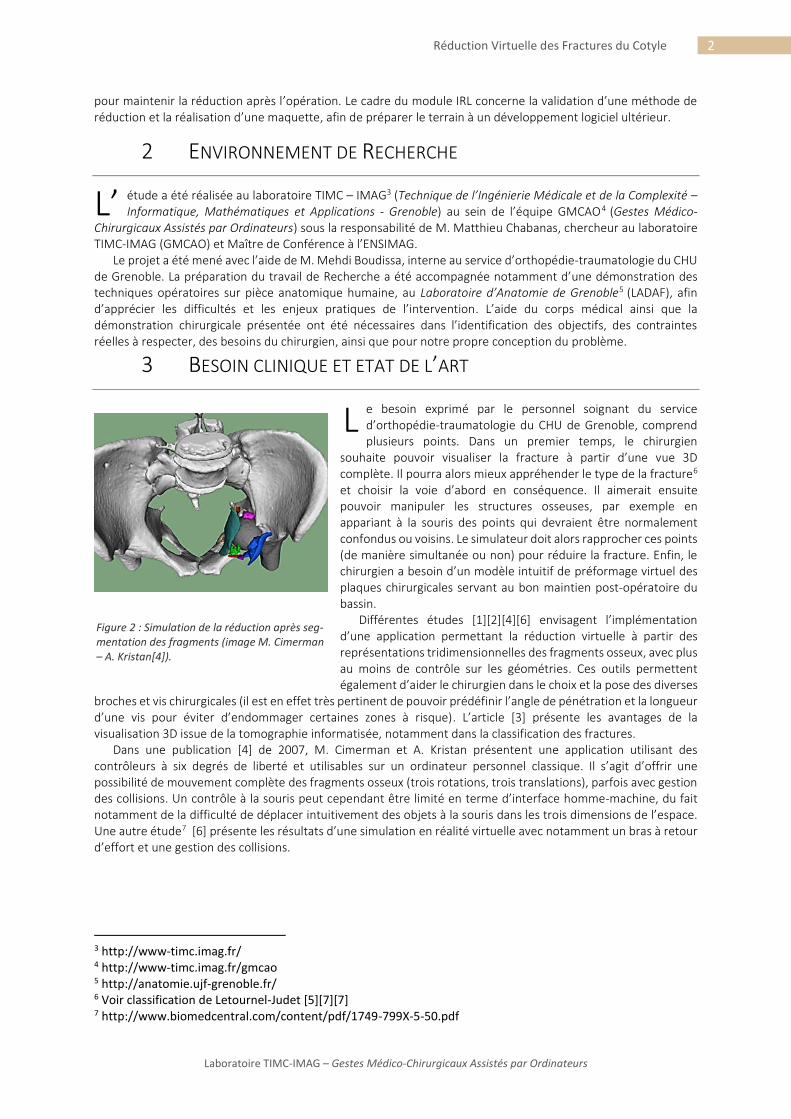
Différentes études [1][2][4][6] envisagent l’implémentation d’une application permettant la réduction virtuelle à partir des représentations tridimensionnelles des fragments osseux, avec plus au moins de contrôle sur les géométries. Ces outils permettent également d’aider le chirurgien dans le choix et la pose des diverses
broches et vis chirurgicales (il est en effet très pertinent de pouvoir prédéfinir l’angle de pénétration et la longueur d’une vis pour éviter d’endommager certaines zones à risque). L’article [3] présente les avantages de la visualisation 3D issue de la tomographie informatisée, notamment dans la classification des fractures.
Dans une publication [4] de 2007, M. Cimerman et A. Kristan présentent une application utilisant des contrôleurs à six degrés de liberté et utilisables sur un ordinateur personnel classique. Il s’agit d’offrir une possibilité de mouvement complète des fragments osseux (trois rotations, trois translations), parfois avec gestion des collisions. Un contrôle à la souris peut cependant être limité en terme d’interface homme-machine, du fait notamment de la difficulté de déplacer intuitivement des objets à la souris dans les trois dimensions de l’espace. Une autre étude7 [6] présente les résultats d’une simulation en réalité virtuelle avec notamment un bras à retour d’effort et une gestion des collisions.
3 http://www-timc.imag.fr/ 4 http://www-timc.imag.fr/gmcao 5 http://anatomie.ujf-grenoble.fr/ 6 Voir classification de Letournel-Judet [5][7][7] 7 http://www.biomedcentral.com/content/pdf/1749-799X-5-50.pdf
L’
L
Figure 2 : Simulation de la réduction après seg-mentation des fragments (image M. Cimerman – A. Kristan[4]).
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
3 Réduction Virtuelle des Fractures du Cotyle
4 METHODE
étude réalisée et détaillée dans les parties suivantes aborde premièrement la question de la segmentation
des données scanners et de la construction du modèle tridimensionnel (4.2). Après avoir effectué cette
étape, il a été possible d’implémenter un modèle de réduction par sélection de points appariés (4.3). Cette mé-
thode doit permettre au chirurgien de simplement choisir des paires de points à la surface des os et de ramener
ces points l’un sur l’autre. Un second paradigme a également été envisagé (4.4), pour palier à certains défauts
majeurs des méthodes par contrôle direct sur les os, trop loin de la réalité de l’intervention et ne correspondant
pas à une procédure médicale. Une maquette a donc été implémentée sur un modèle de simulation des efforts
produits par les outils chirurgicaux, permettant d’établir une procédure plus fidèle au geste clinique réel. Enfin, un
modèle de simulation de plaques chirurgicales (4.5) basé sur un modèle à éléments finis a également été conçu,
pour prévoir la forme des plaques de maintien et fournir un critère de contrôle sur le résultat de l’opération.
En ce qui concerne le choix méthodologique, l’étude des techniques chirurgicales a permis de penser la simu-lation en terme de forces et d’états stables mécaniquement plutôt qu’en terme de recherche d’une configuration géométrique satisfaisante. La réalité de l’opération consiste à travailler en forces sur les structures osseuses. Une modélisation biomécanique a donc été envisagée, constituant par ailleurs une approche inédite et différente de celles étudiées jusqu’à présent. Les méthodes envisagées sont également apparues plus facilement réalisables via un simulateur mécanique, permettant d’induire des efforts pour déplacer les os grâce à un modèle musculaire, et permettant une gestion des collisions plus aisée. La maquette réalisée durant le module d’IRL a ainsi été développée sous l’environnement Artisynth8 [9], plateforme Java open source, pour la simulation de modèles mécaniques (solides, modèles à éléments finis, articulations, etc…) qui est utilisée spécifiquement en Recherche biomédicale. De plus, la plateforme comprend la résolution numérique par différents schémas préimplémentés (schéma d’Euler, méthodes de Runge-Kutta…) au choix. Elle offre par ailleurs une très bonne gestion des collisions.
Les maillages importés sous le logiciel Artisynth, représentent des solides indépendants. Leur position relative d’origine est celle directement obtenue par l’examen scanner. Les paramètres de densité osseuse ont été fixés de manière à limiter au maximum les rebonds et oscillations parasites et ne correspondent pas à la densité réelle, qui en l’absence d’une représentation correcte du milieu musculaire n’aurait guère de sens. Les niveaux de force utilisés sont également fixés empiriquement. La simulation s’appuie sur la méthode de résolution de Runge-Kutta d’ordre 4. Les fonctionnalités de la plateforme ont permis aisément d’imposer une contrainte de non pénétration. Enfin, conformément aux conditions cliniques, certains fragments peuvent être considérés comme fixes dans le référentiel de l’expérience.
L’étude n’a pas permis l’implémentation d’un modèle d’environnement tissulaire (musculature, ligaments, capsule articulaire…) efficace, bien que différentes approches aient été envisagées. Le simulateur implémenté utilise cependant un frottement visqueux uniforme dans tout l’espace, manquant d’efficacité mais limitant dans une certaine mesure les mouvements non souhaités.
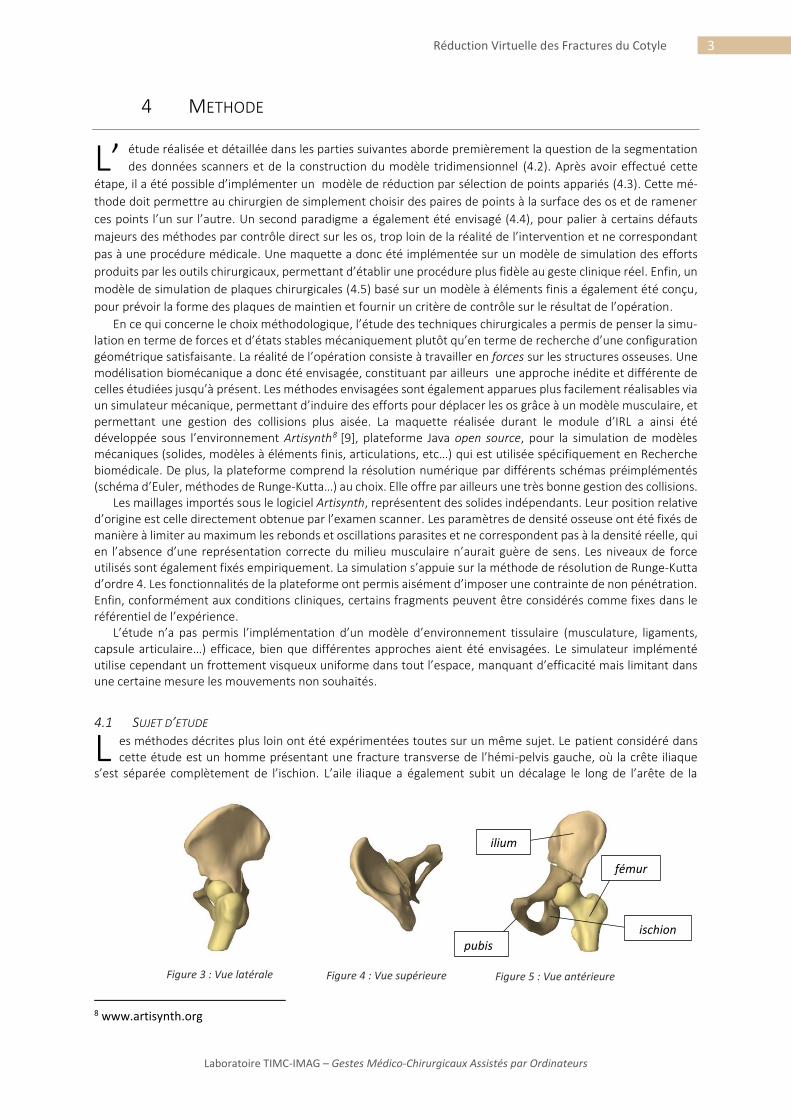
4.1 SUJET D’ETUDE es méthodes décrites plus loin ont été expérimentées toutes sur un même sujet. Le patient considéré dans cette étude est un homme présentant une fracture transverse de l’hémi-pelvis gauche, où la crête iliaque
s’est séparée complètement de l’ischion. L’aile iliaque a également subit un décalage le long de l’arête de la
8 www.artisynth.org
L’
L
Figure 3 : Vue latérale Figure 4 : Vue supérieure Figure 5 : Vue antérieure
ilium
fémur
ischion
pubis
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
4 Réduction Virtuelle des Fractures du Cotyle
fracture. Deux translations semblent nécessaires ici : un rapprochement et une correction du décalage. De plus un petit fragment de cotyle (non visible sur les images qui suivent) s’est détaché et doit être repositionné.
La réalité anatomique permet de supposer (avec confirmation du corps médical) que dans ce cas précis, le fémur (maintenu artificiellement) et l’ischion (immobilisé par la symphyse pubienne) sont fixes dans le cadre de notre simulation.
4.2 EXTRACTION ET TRAITEMENT DES VUES 3D
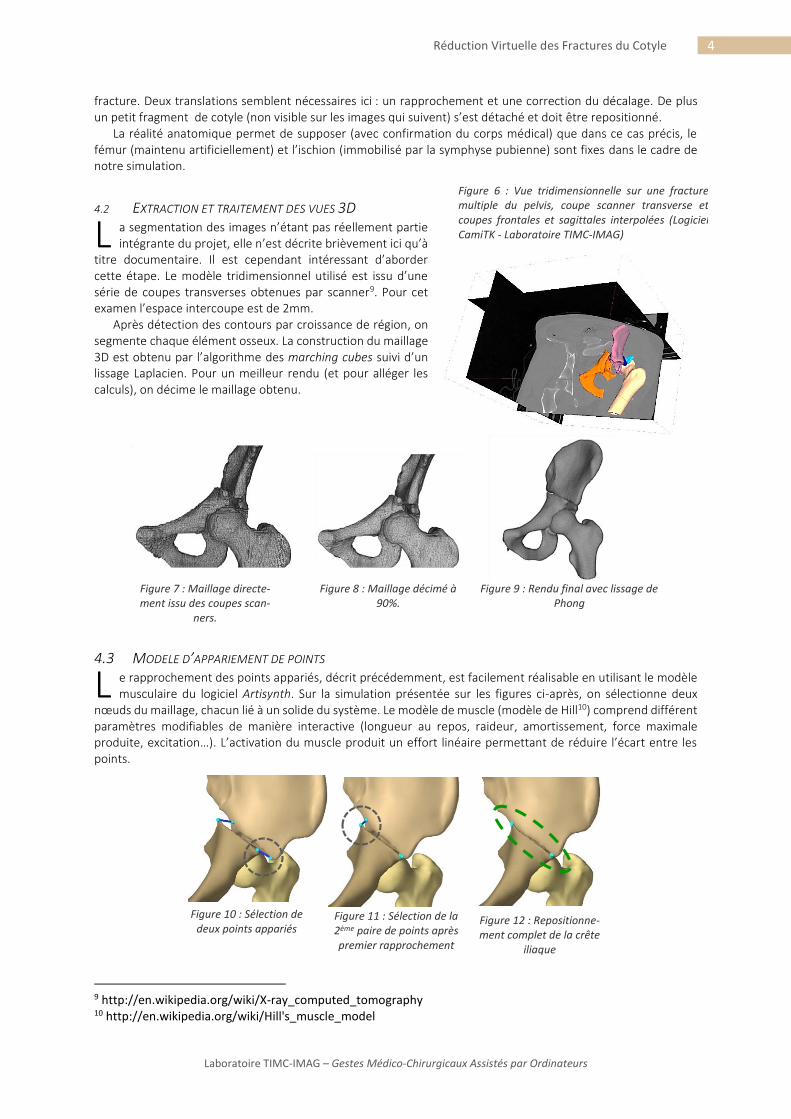
a segmentation des images n’étant pas réellement partie intégrante du projet, elle n’est décrite brièvement ici qu’à
titre documentaire. Il est cependant intéressant d’aborder cette étape. Le modèle tridimensionnel utilisé est issu d’une série de coupes transverses obtenues par scanner9. Pour cet examen l’espace intercoupe est de 2mm.
Après détection des contours par croissance de région, on segmente chaque élément osseux. La construction du maillage 3D est obtenu par l’algorithme des marching cubes suivi d’un lissage Laplacien. Pour un meilleur rendu (et pour alléger les calculs), on décime le maillage obtenu.
4.3 MODELE D’APPARIEMENT DE POINTS e rapprochement des points appariés, décrit précédemment, est facilement réalisable en utilisant le modèle musculaire du logiciel Artisynth. Sur la simulation présentée sur les figures ci-après, on sélectionne deux
nœuds du maillage, chacun lié à un solide du système. Le modèle de muscle (modèle de Hill10) comprend différent paramètres modifiables de manière interactive (longueur au repos, raideur, amortissement, force maximale produite, excitation…). L’activation du muscle produit un effort linéaire permettant de réduire l’écart entre les points.
9 http://en.wikipedia.org/wiki/X-ray_computed_tomography 10 http://en.wikipedia.org/wiki/Hill's_muscle_model
L
L
Figure 6 : Vue tridimensionnelle sur une fracture multiple du pelvis, coupe scanner transverse et coupes frontales et sagittales interpolées (Logiciel CamiTK - Laboratoire TIMC-IMAG)
Figure 10 : Sélection de deux points appariés
Figure 11 : Sélection de la 2ème paire de points après premier rapprochement
Figure 12 : Repositionne-ment complet de la crête
iliaque
Figure 7 : Maillage directe-ment issu des coupes scan-
ners.
Figure 8 : Maillage décimé à 90%.
Figure 9 : Rendu final avec lissage de Phong
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
5 Réduction Virtuelle des Fractures du Cotyle
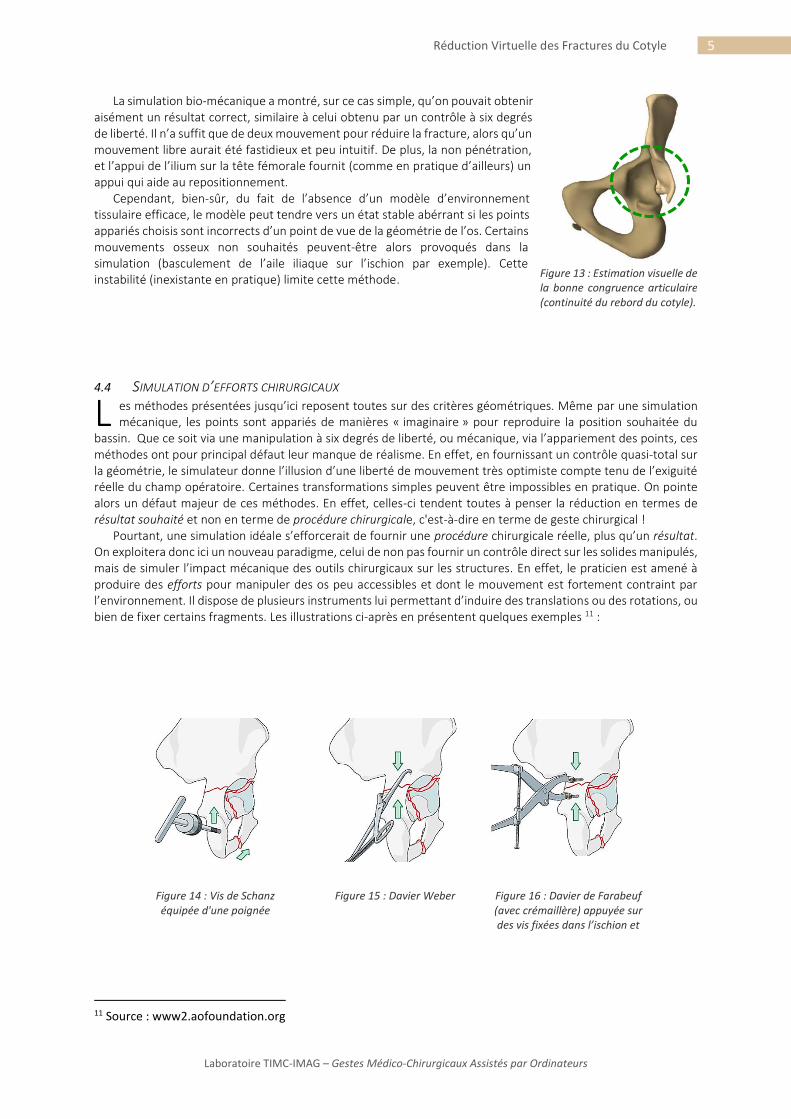
La simulation bio-mécanique a montré, sur ce cas simple, qu’on pouvait obtenir aisément un résultat correct, similaire à celui obtenu par un contrôle à six degrés de liberté. Il n’a suffit que de deux mouvement pour réduire la fracture, alors qu’un mouvement libre aurait été fastidieux et peu intuitif. De plus, la non pénétration, et l’appui de l’ilium sur la tête fémorale fournit (comme en pratique d’ailleurs) un appui qui aide au repositionnement.
Cependant, bien-sûr, du fait de l’absence d’un modèle d’environnement tissulaire efficace, le modèle peut tendre vers un état stable abérrant si les points appariés choisis sont incorrects d’un point de vue de la géométrie de l’os. Certains mouvements osseux non souhaités peuvent-être alors provoqués dans la simulation (basculement de l’aile iliaque sur l’ischion par exemple). Cette instabilité (inexistante en pratique) limite cette méthode.
4.4 SIMULATION D’EFFORTS CHIRURGICAUX
es méthodes présentées jusqu’ici reposent toutes sur des critères géométriques. Même par une simulation mécanique, les points sont appariés de manières « imaginaire » pour reproduire la position souhaitée du
bassin. Que ce soit via une manipulation à six degrés de liberté, ou mécanique, via l’appariement des points, ces méthodes ont pour principal défaut leur manque de réalisme. En effet, en fournissant un contrôle quasi-total sur la géométrie, le simulateur donne l’illusion d’une liberté de mouvement très optimiste compte tenu de l’exiguité réelle du champ opératoire. Certaines transformations simples peuvent être impossibles en pratique. On pointe alors un défaut majeur de ces méthodes. En effet, celles-ci tendent toutes à penser la réduction en termes de résultat souhaité et non en terme de procédure chirurgicale, c'est-à-dire en terme de geste chirurgical !
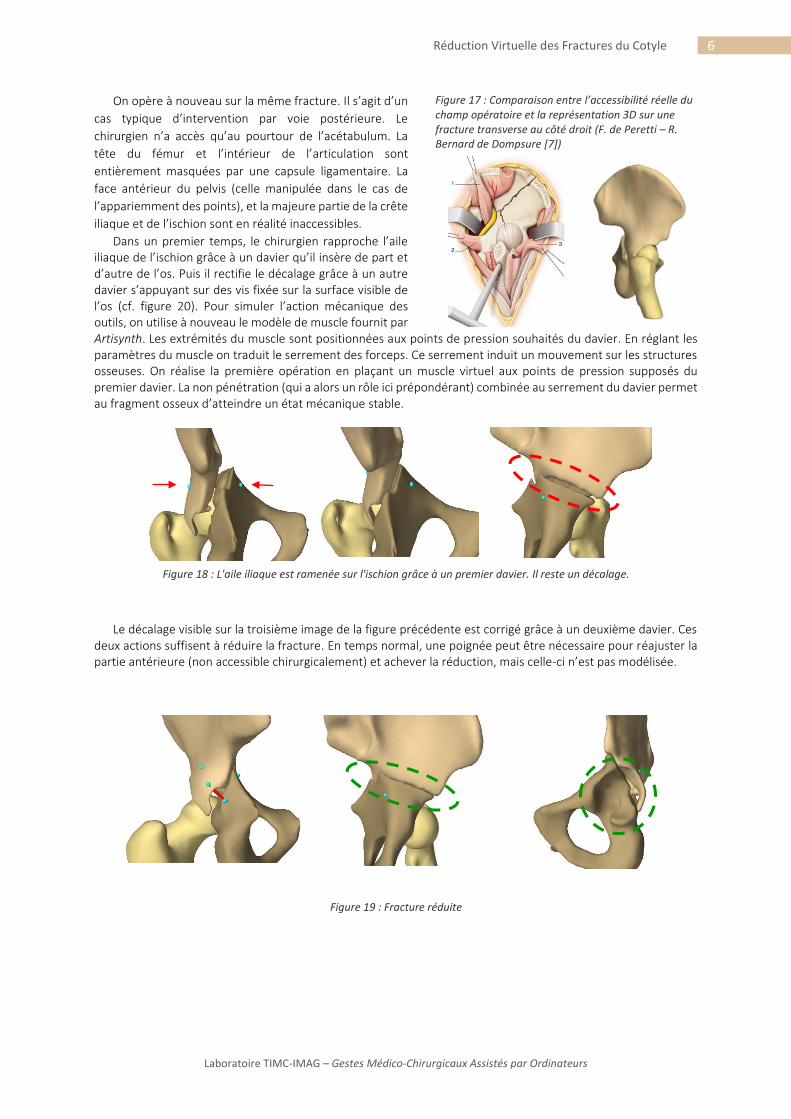
Pourtant, une simulation idéale s’efforcerait de fournir une procédure chirurgicale réelle, plus qu’un résultat. On exploitera donc ici un nouveau paradigme, celui de non pas fournir un contrôle direct sur les solides manipulés, mais de simuler l’impact mécanique des outils chirurgicaux sur les structures. En effet, le praticien est amené à produire des efforts pour manipuler des os peu accessibles et dont le mouvement est fortement contraint par l’environnement. Il dispose de plusieurs instruments lui permettant d’induire des translations ou des rotations, ou bien de fixer certains fragments. Les illustrations ci-après en présentent quelques exemples 11 :
11 Source : www2.aofoundation.org
L
Figure 13 : Estimation visuelle de la bonne congruence articulaire (continuité du rebord du cotyle).
Figure 15 : Davier Weber Figure 14 : Vis de Schanz équipée d'une poignée
Figure 16 : Davier de Farabeuf (avec crémaillère) appuyée sur des vis fixées dans l’ischion et
l’ilium.
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
6 Réduction Virtuelle des Fractures du Cotyle
On opère à nouveau sur la même fracture. Il s’agit d’un
cas typique d’intervention par voie postérieure. Le
chirurgien n’a accès qu’au pourtour de l’acétabulum. La
tête du fémur et l’intérieur de l’articulation sont
entièrement masquées par une capsule ligamentaire. La
face antérieur du pelvis (celle manipulée dans le cas de
l’appariemment des points), et la majeure partie de la crête
iliaque et de l’ischion sont en réalité inaccessibles.
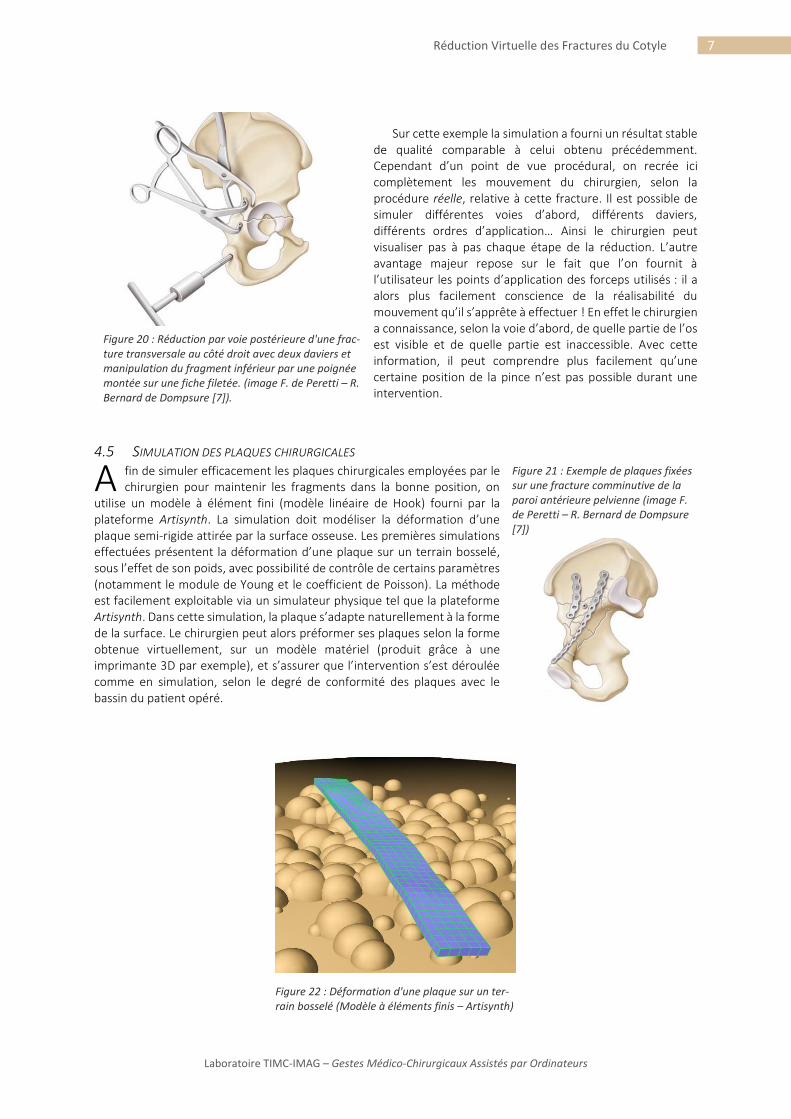
Dans un premier temps, le chirurgien rapproche l’aile iliaque de l’ischion grâce à un davier qu’il insère de part et d’autre de l’os. Puis il rectifie le décalage grâce à un autre davier s’appuyant sur des vis fixée sur la surface visible de l’os (cf. figure 20). Pour simuler l’action mécanique des outils, on utilise à nouveau le modèle de muscle fournit par Artisynth. Les extrémités du muscle sont positionnées aux points de pression souhaités du davier. En réglant les paramètres du muscle on traduit le serrement des forceps. Ce serrement induit un mouvement sur les structures osseuses. On réalise la première opération en plaçant un muscle virtuel aux points de pression supposés du premier davier. La non pénétration (qui a alors un rôle ici prépondérant) combinée au serrement du davier permet au fragment osseux d’atteindre un état mécanique stable.
Le décalage visible sur la troisième image de la figure précédente est corrigé grâce à un deuxième davier. Ces
deux actions suffisent à réduire la fracture. En temps normal, une poignée peut être nécessaire pour réajuster la partie antérieure (non accessible chirurgicalement) et achever la réduction, mais celle-ci n’est pas modélisée.
Figure 17 : Comparaison entre l’accessibilité réelle du champ opératoire et la représentation 3D sur une fracture transverse au côté droit (F. de Peretti – R. Bernard de Dompsure [7])
Figure 18 : L'aile iliaque est ramenée sur l'ischion grâce à un premier davier. Il reste un décalage.
Figure 19 : Fracture réduite
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
7 Réduction Virtuelle des Fractures du Cotyle
Sur cette exemple la simulation a fourni un résultat stable de qualité comparable à celui obtenu précédemment. Cependant d’un point de vue procédural, on recrée ici complètement les mouvement du chirurgien, selon la procédure réelle, relative à cette fracture. Il est possible de simuler différentes voies d’abord, différents daviers, différents ordres d’application… Ainsi le chirurgien peut visualiser pas à pas chaque étape de la réduction. L’autre avantage majeur repose sur le fait que l’on fournit à l’utilisateur les points d’application des forceps utilisés : il a alors plus facilement conscience de la réalisabilité du mouvement qu’il s’apprête à effectuer ! En effet le chirurgien a connaissance, selon la voie d’abord, de quelle partie de l’os est visible et de quelle partie est inaccessible. Avec cette information, il peut comprendre plus facilement qu’une certaine position de la pince n’est pas possible durant une intervention.
4.5 SIMULATION DES PLAQUES CHIRURGICALES
fin de simuler efficacement les plaques chirurgicales employées par le chirurgien pour maintenir les fragments dans la bonne position, on
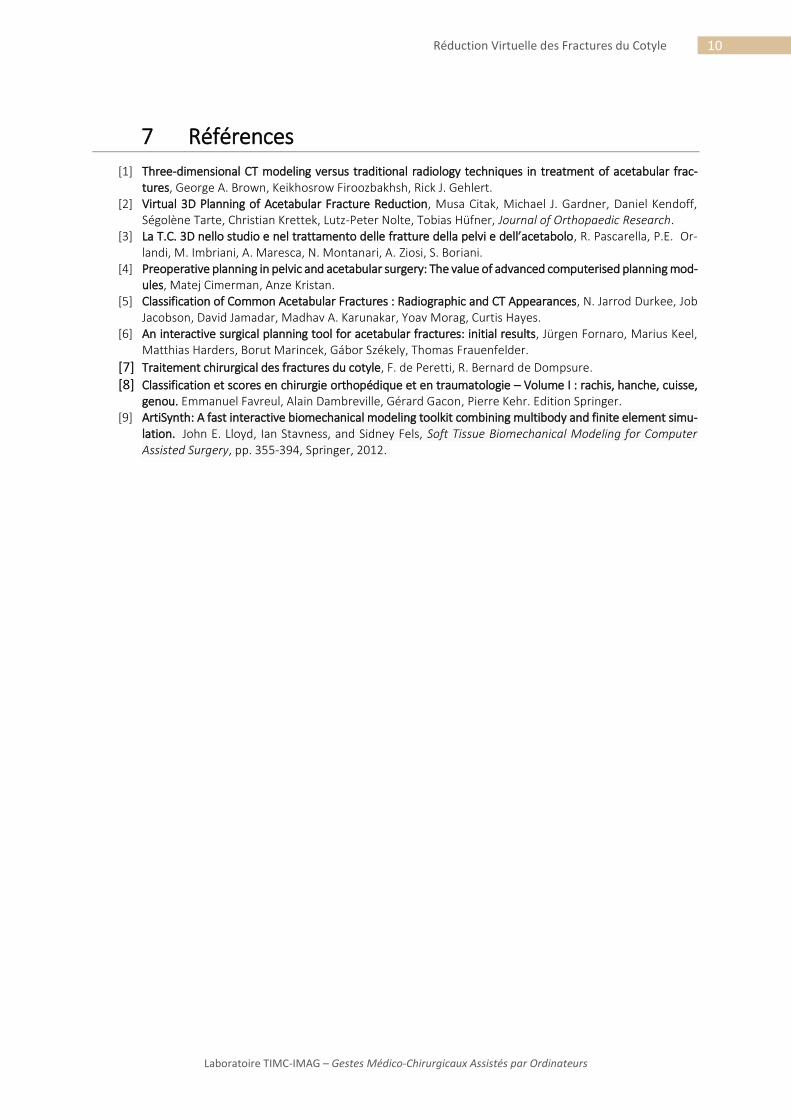
utilise un modèle à élément fini (modèle linéaire de Hook) fourni par la plateforme Artisynth. La simulation doit modéliser la déformation d’une plaque semi-rigide attirée par la surface osseuse. Les premières simulations effectuées présentent la déformation d’une plaque sur un terrain bosselé, sous l’effet de son poids, avec possibilité de contrôle de certains paramètres (notamment le module de Young et le coefficient de Poisson). La méthode est facilement exploitable via un simulateur physique tel que la plateforme Artisynth. Dans cette simulation, la plaque s’adapte naturellement à la forme de la surface. Le chirurgien peut alors préformer ses plaques selon la forme obtenue virtuellement, sur un modèle matériel (produit grâce à une imprimante 3D par exemple), et s’assurer que l’intervention s’est déroulée comme en simulation, selon le degré de conformité des plaques avec le bassin du patient opéré.
A
Figure 20 : Réduction par voie postérieure d'une frac-ture transversale au côté droit avec deux daviers et manipulation du fragment inférieur par une poignée montée sur une fiche filetée. (image F. de Peretti – R. Bernard de Dompsure [7]).
Figure 22 : Déformation d'une plaque sur un ter-rain bosselé (Modèle à éléments finis – Artisynth)
Figure 21 : Exemple de plaques fixées sur une fracture comminutive de la paroi antérieure pelvienne (image F. de Peretti – R. Bernard de Dompsure [7])

Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
8 Réduction Virtuelle des Fractures du Cotyle
5 CONCLUSION
ans le temps imparti à l’IRL, l’essentiel des simulations a été effectué sur un même exemple de fracture
simple. Une phase de validation plus complète serait souhaitable sur une large batterie de fractures. D’autre
part, la principale limite du modèle de simulation d’efforts chirurgicaux (due principalement à des difficultés tech-
niques), repose sur la modélisation de l’environnement musculaire pelvien. En effet, la simulation souffre de
quelques instabilités dues au manque de contraintes, qui réduisent la maniabilité. Un simulateur idéal rendrait
compte de tout l’environnement pelvien en s’appuyant sur une cartographie complète du pourtour musculo-liga-
mentaire, lequel contraint en réalité fortement les déplacements osseux. Une telle représentation est trop ambi-
tieuse et poserait de nombreux problèmes majeurs (détermination de nombreux paramètres, adaptation d’une
musculature préétablie sur un bassin fracturé spécifique). Le frottement fluide utilisé dans nos simulations ne
permet pas d’éliminer efficacement les rebonds indésirables. L’idéal serait de supprimer les mouvements « indi-
rects » (rebonds, oscillations dues aux ressorts…), et ne prendre en compte que ceux induits par le chirurgien.
Certaines modélisations plus fines ont été envisagées. Il serait par exemple possible de modéliser la capsule liga-
mentaire du cotyle grâce à une nappe de ressorts. De plus, sur les conseils de l’équipe soignante, on pourrait
envisager un frottement non uniforme plus fort à mesure que l’on s’approche du centre de la tête fémorale, ce
qui correspondrait au ressenti réel des chirurgiens. Par ailleurs, notre modèle de solides indéformables ne permet
pas la gestion des fractures partielles (séparation incomplète des fragments), qui représentent pourtant des cas
d’une grande complexité. Enfin, une partie interface homme-machine sera bien-sûr à développer pour la poursuite
et l’application du projet.
Malgré ces limites, la démarche de recherche entreprise a permis de proposer une réelle alternative aux mo-
dèles présentés dans les publications antérieures et de fournir une preuve de concept. L’appariement de points a
permis de reproduire un résultat correct et de valider l’approche méthodologique biomécanique. Cette méthode,
utilise des critères de réduction géométriques, mais de manière plus simple et plus intuitive qu’avec un contrôleur
à six degrés de liberté. Enfin et surtout, ce modèle répond aux premières attentes du personnel médical du CHU
de Grenoble, qui pourra avoir accès à une vue complète de la fracture et interagir avec les fragments.
D’autre part, l’étude a mis en évidence les limites de la manipulation directe des fragments osseux et a permis
de proposer un nouveau paradigme. Au lieu d’accorder un contrôle direct sur les fragments osseux et leur induire
des déplacements libres, on propose la simulation des efforts produits par les outils du praticien. Cette méthode
assure une simulation plus fidèle à la procédure chirurgicale, fournissant non pas un résultat souhaité, mais un
vrai planning des différentes actions ! Il a ainsi été possible sur le cas d’une fracture transversale simple de repro-
duire avec succès les mêmes gestes que ceux exécutés lors d’une vraie opération sur ce type de fracture. D’autre
part, ce procédé rend mieux compte des mouvements et accès impossibles dans la pratique (réelle lacune aux
méthodes précédentes).
La simulation d’une plaque chirurgicale par modèles à éléments finis semble très réalisable et simple d’utilisa-
tion, bien que de réels tests sur la fracture n’aient pu être réalisés. Cette simulation pourra éventuellement aider
grandement à la préformation des plaques et la validation post-opératoire en termes de correspondance entre la
simulation et la réalité.
D

Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
9 Réduction Virtuelle des Fractures du Cotyle
6 REMERCIEMENTS
e voudrais remercier mon enseignant et encadrant de stage, M. Matthieu Chabanas, pour m’avoir soutenu, conseillé et guidé dans ce projet. Je lui suis reconnaissant pour la confiance et pour la grande liberté de ma-
nœuvre et de discussion critique qu’il m’a accordées, ainsi que pour les multiples échanges scientifiques, d’une grande richesse, que nous avons entretenus.
Je tiens également à remercier l’équipe GMCAO, pour l’aide que ses membres m’ont fournie à de multiples reprises, dans ma prise en main de la plateforme Artisynth notamment, mais aussi pour l’accueil chaleureux dont j’ai bénéficié.
Enfin, j’exprime mes remerciements au corps médical du CHU de Grenoble, et particulièrement à M. Mehdi Boudissa. L’aide du personnel soignant a été précieuse dans la définition des objectifs, et les échanges interdisci-plinaires que nous avons entretenus ont été d’un grand intérêt dans la qualité du travail réalisé.
J
Laboratoire TIMC-IMAG – Gestes Médico-Chirurgicaux Assistés par Ordinateurs
10 Réduction Virtuelle des Fractures du Cotyle
7 Références
[1] Three-dimensional CT modeling versus traditional radiology techniques in treatment of acetabular frac-tures, George A. Brown, Keikhosrow Firoozbakhsh, Rick J. Gehlert.
[2] Virtual 3D Planning of Acetabular Fracture Reduction, Musa Citak, Michael J. Gardner, Daniel Kendoff, Ségolène Tarte, Christian Krettek, Lutz-Peter Nolte, Tobias Hüfner, Journal of Orthopaedic Research.
[3] La T.C. 3D nello studio e nel trattamento delle fratture della pelvi e dell’acetabolo, R. Pascarella, P.E. Or-landi, M. Imbriani, A. Maresca, N. Montanari, A. Ziosi, S. Boriani.
[4] Preoperative planning in pelvic and acetabular surgery: The value of advanced computerised planning mod-ules, Matej Cimerman, Anze Kristan.
[5] Classification of Common Acetabular Fractures : Radiographic and CT Appearances, N. Jarrod Durkee, Job Jacobson, David Jamadar, Madhav A. Karunakar, Yoav Morag, Curtis Hayes.
[6] An interactive surgical planning tool for acetabular fractures: initial results, Jürgen Fornaro, Marius Keel, Matthias Harders, Borut Marincek, Gábor Székely, Thomas Frauenfelder.
[7] Traitement chirurgical des fractures du cotyle, F. de Peretti, R. Bernard de Dompsure. [8] Classification et scores en chirurgie orthopédique et en traumatologie – Volume I : rachis, hanche, cuisse,
genou. Emmanuel Favreul, Alain Dambreville, Gérard Gacon, Pierre Kehr. Edition Springer. [9] ArtiSynth: A fast interactive biomechanical modeling toolkit combining multibody and finite element simu-
lation. John E. Lloyd, Ian Stavness, and Sidney Fels, Soft Tissue Biomechanical Modeling for Computer Assisted Surgery, pp. 355-394, Springer, 2012.





























