-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Microcontrleur (extrait de : http://fr.wikipedia.org/)
Un microcontrleur est un circuit intgr qui rassemble les lments
essentiels d'un ordinateur : processeur, mmoires (mmoire morte pour
le programme, mmoire vive pour les donnes), units priphriques et
interfaces d'entres-sorties. Les microcontrleurs se caractrisent
par un plus haut degr d'intgration, une plus faible consommation
lectrique (quelques milliwatts en fonctionnement, quelques
nanowatts en veille), une vitesse de fonctionnement plus faible
(quelques mgahertz quelques centaines de mgahertz[1]) et un cot
rduitpar rapport aux microprocesseurs polyvalents utiliss dans les
ordinateurs personnels.
Par rapport des systmes lectroniques base de microprocesseurs et
autres composants spars, les microcontrleurs permettent de diminuer
la taille, la consommation lectrique et le cot des produits. Ils
ont ainsi permis de dmocratiser l'utilisation de l'informatique
dans un grand nombre de produits et de procds.
Les microcontrleurs sont frquemment utiliss dans les systmes
embarqus, comme les contrleurs des moteurs automobiles, les
tlcommandes, les appareils de bureau, l'lectromnager, les jouets,
la tlphonie mobile, etc.
La plus grande partie des systmes lectroniques complexes utiliss
de nos jours sont des systmes embarqus : tlphones mobiles,
horloges, baladeurs, rcepteurs GPS, lectromnager, automobile,
transport arien/maritime/fluvial. Les systmes embarqus se dmarquent
des systmes informatiques traditionnels selon plusieurs aspects
:
Ils sont soumis des contraintes de taille (intgration), de
consommation lectrique (autonomie) et de cot importantes (grande
srie) ;
Ils sont en gnral ddis une tche bien prcise. La taille des
programmes et la quantit de mmoire (vive et morte), dont ils
disposent, sont modestes (face un micro-ordinateur) ;
Ils doivent communiquer avec des dispositifs d'entres-sorties
(IO) : boutons, relais, rsistances variables, optocoupleurs,
moteurs lectriques, LED, circuits intgrs logiques, etc. ;
Ils n'ont parfois aucun dispositif d'interface homme-machine :
ni clavier, ni cran, ni disque, ni imprimante, etc. Par exemple, le
contrleur d'injection de carburant du moteur d'une automobile est
totalement invisible pour le conducteur.
LES SYSTEMES MICRO-PROGAMMES (article du Lyces E.Prochon et
J.Desfontaines, section Sciences de l'Ingnieur )
Les systmes microprocesseurs ou microcontrleurs sont omniprsents
dans la vie de tous les jours. On les rencontre dans des systmes
complexes (ordinateurs individuels) mais galement dans des systmes
simples (machine laver, pompe essence, store automatique, ...) o
leur grande souplesse est apprcie.
http://fr.wikipedia.org/wiki/Circuit_int%C3%A9gr%C3%A9http://fr.wikipedia.org/wiki/Carburanthttp://fr.wikipedia.org/wiki/Imprimantehttp://fr.wikipedia.org/wiki/Disquehttp://fr.wikipedia.org/wiki/%C3%89cranhttp://fr.wikipedia.org/wiki/Clavier_d'ordinateurhttp://fr.wikipedia.org/wiki/Interface_homme-machinehttp://fr.wikipedia.org/wiki/Logiquehttp://fr.wikipedia.org/wiki/Circuit_int%C3%A9gr%C3%A9http://fr.wikipedia.org/wiki/Diode_%C3%A9lectroluminescentehttp://fr.wikipedia.org/wiki/Moteur_%C3%A9lectriquehttp://fr.wikipedia.org/wiki/Optocoupleurhttp://fr.wikipedia.org/wiki/R%C3%A9sistancehttp://fr.wikipedia.org/wiki/Relaishttp://fr.wikipedia.org/wiki/Entr%C3%A9es-sortieshttp://fr.wikipedia.org/wiki/Ordinateur_personnelhttp://fr.wikipedia.org/wiki/M%C3%A9moire_mortehttp://fr.wikipedia.org/wiki/M%C3%A9moire_vivehttp://fr.wikipedia.org/wiki/Automobilehttp://fr.wikipedia.org/wiki/Global_Positioning_Systemhttp://fr.wikipedia.org/wiki/Baladeurhttp://fr.wikipedia.org/wiki/T%C3%A9l%C3%A9phonehttp://fr.wikipedia.org/wiki/Syst%C3%A8me_embarqu%C3%A9http://fr.wikipedia.org/wiki/Syst%C3%A8me_embarqu%C3%A9http://fr.wikipedia.org/wiki/Microprocesseurhttp://fr.wikipedia.org/wiki/Ordinateur_personnelhttp://fr.wikipedia.org/wiki/Microprocesseurhttp://fr.wikipedia.org/wiki/Microcontr%C3%B4leur#cite_note-0http://fr.wikipedia.org/wiki/Entr%C3%A9es-sortieshttp://fr.wikipedia.org/wiki/M%C3%A9moire_vivehttp://fr.wikipedia.org/wiki/M%C3%A9moire_mortehttp://fr.wikipedia.org/wiki/M%C3%A9moire_informatiquehttp://fr.wikipedia.org/wiki/Processeurhttp://fr.wikipedia.org/wiki/Ordinateur
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
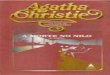
Unit de traitement lectronique
Interfaage d'entre
Unit centrale de traitement
Interfaage de sortieCAPTEURS
ACTIONNEUR
OPERATEUR
ORGANISATION FONCTIONNELLE D'UN SYSTEME A MICROCONTROLEUR"
Signaux analogique, numrique et/ou logique
Signaux numriques traitsSignaux numriques traiterSignaux
analogique, numrique et/ou logique
Un objet technique, intgrant de llectronique, fait souvent
apparatre des fonctions ayant pour rle le traitement dinformations
: oprations arithmtiques (addition, multiplication...) ou logiques
( ET, OU...) entre plusieurs signaux dentre permettant de gnrer des
signaux de sortie.
Ces fonctions peuvent tre ralises par des circuits intgrs
analogiques ou logiques. Mais, lorsque lobjet technique devient
complexe, et quil est alors ncessaire de raliser un ensemble
important de traitements dinformations, il devient plus simple de
faire appel une structure base de microcontrleur.
Mmoires programmes :
Ce dispositif contient les instructions du programme que doit
excuter le microprocesseur. Ce type de mmoire (appele mmoire
morte), est uniquement accessible en lecture. Sa programmation
ncessite une procdure particulire et un matriel adquate. Il en
existe diffrents types selon leur mode de programmation:
Les interfaces :
Les interfaces permettent de relier plusieurs constituants ntant
pas forcment compatibles entre eux. Cet tage va donc raliser une
adaptation entre les diffrents signaux prsents en entre et en
sortie. Par exemple le microprocesseur peut donner lordre
douverture dun vanne mais il ne dispose pas dassez dnergie pour
effectuer cette action. Linterface fournira lnergie ncessaire.
Les priphriques :
Ce sont des organes extrieur au systme microprogramm. Sans
priphriques, le systme fonctionnerait mais il ne servirait rien
puisquil nchangerait aucune information avec lextrieur. Parmi les
priphriquesles plus connus, on peut citer : lcran, le clavier, la
souris, limprimante, les haut-parleurs, le scanner, la cl USB,
...
Description et programmation de la tche accomplir
On dfinit dans le cahier des charges lensemble des commandes ou
actions que doit raliser le microcontrleur. Ces dfinitions sont
donnes dans un ordre spcifique : il sagit dun fonctionnement
squentiel. Avant den gnrer le code machine binaire comprhensible
par le microcontrleur, des tapes intermdiaires sont ncessaires afin
de rduire les risques derreurs et les difficults. On fait dabord
apparatre le cycle de fonctionnement laide de deux reprsentations
normalises : lalgorithme et lalgorigramme (voir cours sur les
algorithmes). On peut ensuite crire le programme associ en
utilisant diffrents langages :
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Un langage assembleur spcifique au type du microprocesseur qui
est traduit en code machine lors de lopration dassemblage.
Un langage volu (C, Pascal et Basic) utilisant des procdures
adaptes au type de microprocesseur etqui est traduit en code
machine par une opration de compilation effectue par un Cross -
compilateur.
Un langage graphique (organigramme, ladder) qui permet
visuellement de voir le programme.
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
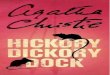
Interface Robo TX Controller Fischertechnik
159,90 HT
191,24 TTC
Ref:FI500995
Cette interface est dote dun processeur 32bits, dun cran LCD,
dune capacit mmoireleve et dun botier compact (90 x 90 x 15mm).Elle
dispose de nombreuses possibilits demontage et permet de rapporter
des pices sur5 faces. Module radio Bluetooth intgr (2,4
GHz/portedenviron 10 mtres). Le couplage de plusieurs ROBO TX
CONTROLLER est possible.
Caractristiques techniques- Processeur 32 bits ARM 9 (200 MHz)-
Capacit mmoire : 8 Mo RAM, 2 Mo Flash- Poids : rien que 90 g- 8
entres universelles : numrique/analogique - 0-9 Volts DC,
analogique 0-5 kO- 4 entres de compteur rapides : numrique, -
frquence jusqu 1 kHz- 4 sorties moteur 9 Volts/250 mA : rglage
progressif de la vitesse, protection contre les
courtscircuits,alternative compose de 8 sorties individuelles- 2
raccordements dextension : I2C et RS 485 pour le couplage avec
dautres ROBO TX Controller - Ecran : 128 x 64 pixels, monochrome-
Interface USB : USB 2.0 (compatible 1.1), maxi 12 Mbit, y compris
une douille USB miniature- Programmable avec le logiciel ROBO Pro
ou C-Compiler (non fourni)- Contient le cble de raccordement USB-
Equipement requis : Accu Set ou Power Set
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Logiciel de programmation ;
Simple d'accs pour les dbutants avec un graphisme de type
organigramme, le logiciel Robo Pro vous apporte une solution de
programmation intuitive. Le logiciel est spar en plusieurs tapes en
fonction des connaissances. Robo Pro vous offre la possibilit de
crer des sous-programmes afin de faciliter lalisibilit de
l'organigramme. Ces sous-programmes peuvent tre enregistrs dans une
bibliothque afin d'tre r-utiliss pour d'autres organigrammes,
sansregarder en dtail ce qu'il contient. Un dbutant pourra donc
aisment crer un programme complexe. L'avancement du programme est
visualis l'cran, sur le logiciel.
Le langage de programmation graphique Robo Pro fournit tous les
lments cls d'un langagede programmation moderne, comme les
matrices, les fonctions, les objets, les vnements asynchrones et le
traitement parallle. Les programmes sont traduits directement dans
le langage machine afin d'avoir une excution efficace mme pour les
programmes les plus complexes. Les programmeurs, mme avancs,
constateront que Robo Pro n'a aucune limite. Avec Robo Pro, il est
facile d'crire et d'enseigner la programmation ou d'changer des
donnes. Il est possible de contrler plusieurs interfaces en
parallle pour les modles grande chelle et faire des pupitres de
commande personnaliss qui incluent des dtections decapteurs, des
contrles de commandes et mme afficher des lments.
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
ZELIO SR2-8E 4S+ALIM+CABLE USB
143,10 EUR
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Polydis vous propse un Pack complet comprenant:
- 1 Zelio SR2 8 entrs / 4 sorties ( rf: AZELIO C 8-4)
- 1 cable pour relier le Zelio l'ordinateur via un port USB (
rf: ACABLZELIO01)
-1 Alimentation rgule dcoupage : 25 W/2 A/12 V
(rf:AALIMZELIO01)
Programmation graphique par bloc fonctions ou ladder.
Pack dcouverte Groomy + MaqPlusRf. 18108584 824,40
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
TTC689,30 HT
Facilit de mise en oeuvre : un botier programmable est reli par
des cordons des capteurs et des actionneurs
Groomy est une interface innovante qui permet le pilotage
distance via le rseau, de tous les systmes automatiss que vous
aurez conus
Quel que soit votre besoin, Groomy s'utilise en toute simplicit
en mode manuel ou autonome.1 Groomy est pilotable en mode manuel au
travers de votre navigateur internet.
2 Au lancement de votre application, toutes les Groomy du rseau
sont dtectes.Slectionnez votre Groomy d'un simple clic, elle est
immdiatement affecte.Aucun paramtrage, aucun driver.
3 Groomy fonctionne en mode automate. Plus besoin de laisser
votre ordinateur allum, Groomy devient indpendante :- Excution du
programme pralablement charg*,- Stockage de donnes numriques et
analogiques*,- Envois de mails*.
4 Groomy devient accessible n'importe o sur la toile*.- Pilotez
votre habitation distance. - Vos lves peuvent suivre de chez eux
des expriences l'autre bout du monde.
Remarque : Votre routeur (box) doit tre paramtr pour autoriser
Groomy dialoguer avec l'extrieur.
4 bonnes raisons de choisir Groomy
Spcifications communes toutes les entresChaque entre est cble
sur une embase jack stro de 2,5 mm. 3 signaux : masse, signal
dentre, alimentation +5 V. Protection du signal d'entre contre les
surtensions.
Spcifications communes toutes les sorties
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Chaque sortie est sur une embase jack stro de 3,5 mm.3 signaux :
masse, signal de sortie, alimentation +5 V. Les signaux de sorties
sont protgs contre les courts-circuits.
galement contenu dans Groomy :- horloge interne avec sauvegarde
(heure/date),- 2 Mbits Flash,- 1 Mbit EEPROM.
4 contacts bipolaires de 4 relais numrots pour commander
directement des lments de puissance (moteur, lampe, ...).Chaque
contact est limit 24 V, 2 A.
Logiciel de programmation graphique sous forme dorganigramme
:
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
AutoProg
Le botier de commande AutoProg est compos de 8 entres numriques,
4 entres analogiques, 8 sorties numriques, mmoire de programme 600
instructions.
L'alimentation est faite par 4 piles ou accus AA.Il existe une
option alimentation externe par bloc secteur rgule en interne 5 V,
1,2 A maxi.Connexion aux modules par cordons type jack.
Attention : piles, bloc alimentation externe secteur, cordons de
liaison aux modules, cble de programmation commander part.
Dimension 42 x 108 x 140 mm.
Livr en version kit : circuit imprim perc, composant souder,
pices du botier assembler, visserie.
Temps de montage env. 1 h. 83.27
Logiciel gratuit programming editor :programmation en
organigramme
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Carte Picaxe High Power 18 Project board -kit - [CHI035]
[RAX-CHI035]
Permet le prototypage dapplications autour dun microcontrleur
Picaxe de type 18M ou 18X.
Equipe avec 4 transistors de puissance FET et un emplacement
pour un circuit L293D pour contrler la rotation de 2 moteurs.
Microcontrleur de type 18 et circuit L293D non fournis commander
sparment.
Alimentation 4,5V. 12,13 HT
Ncessite le Microcontrleur Picaxe 18X (PIC16F88) (DIP) -
[AXE015X] [IC-RE18X]
5 entres dont 3 avec Convertisseur Analogique / Numrique + 9
sorties. Capacit mmoire (nombre de lignes de programme) 600 1800
instructions. Botier DIL 18 broches.
3,48 HT
Ncessite le L293D 2,5HT soit un total de12,13+3,48+2,5=18,11 HT
cest dire 21,73 TTC
Logiciel gratuit Editor6 :programmation graphique :en
organigramme ou blocs
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Platine Arduino "Uno"
Rfrence : UNO-328 : 22.68 TTC (18,9 HT)
ou UNO R3 100% compatible Arduino 14, 98 TTC
Les modules Arduino sont des plate-formes de prototypage
microcontrles "open-source" spcialement conues pour les artistes,
les concepteurs ou les hobistes. Cette version est achitecture
autour d'un ATmega328 (livr et mont sur support) associ une
interface USB (le cble est propos est en option au bas de la page).
L'ensemble des entres/sorties de la platine sont disponibles sur
des connecteurs femelles prsents sur les bords de la platine.
Nous proposons galement au bas de la page une petite platine
d'extension optionnelle idalement conue pour faciliter le
raccordement et l'exploitation des diffrents signaux de la platine
Arduino. Il est galement possible d'ajouter un coprocesseur
mathmatique (voir en bas de page) la platine Arduino.
Programmables via un langage proche du "C" (disponible en libre
tlchargement), les modules Arduino peuvent fonctionner de faon
autonome ou en communicant avec un logiciel "tournant" sur un
ordinateur (Flash, MaxMSP...).
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Aussi programmable en bloc avec Ardublock :
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
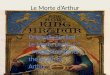
Le cerveau de ton robot !
Brique intelligente NXT N de l'article : 9841Prix EUR 160.50
a toute nouvelle brique intelligente NXT constitue le vritable
centre nerveux de ton robot. Elle comprend un microprocesseur d'une
puissance de 32 bits, une mmoire Flash et prend en charge les
technologies Bluetoothet USB 2.0 ! Caractristiques de la brique
intelligente NXT :
Microprocesseur 32 bits ARM7. Prise en charge de communications
sans fil Bluetooth. 1 port USB 2.0. 4 ports d'entre. 3 ports de
sortie. Alimentation : 6 piles AA de 1,5 V (non incluses) ou N 9798
Pile rechargeable au lithium (vendue
sparment). Tu peux connecter jusqu' trois briques NXT en mme
temps mais tu ne peux communiquer qu'avec
une seule brique NXT la fois. Ce composant est vendu seul, sans
capteur ni moteur ni cble ni logiciel ni autre accessoire.
L'ensemble
de jeu LEGO MINDSTORMS NXT complet correspond l'article N 8527
ou N 8547.
Logiciel utilisant la reprsentation graphique :
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
Contrleur de Moteurs CC BasicATOM Nano Basic MicroCode de
produit : RB-Bat-19
Qt Prix
1 x 24,95$ USD
10 x 23,45$ USD
100 x 22,05$ USD
Plateforme idale pour les dbutant ou les utilisateurs expriments
Dmontre la puissance de la Nano Socle pour pont en H double L293
Alimentation sur bornier vis de 3,5 mm 8 embases pour servomoteur
ou E/ S
La Carte Pilote de deux moteurs BasicATOM Nano de Basic Micro
est la plateforme idale pour les dbutants comme pour les
utilisateurs expriments. Elle dmontre la puissance de la Nano en
contrlant plusieurs priphriques courant lev. Elle fournit un pont
en H L293, 4 IRF520 MOSFETS, un pilote ULN2803 Darlington et des
borniers vis pour un accs facile aux sorties. Le pilote Nano
facilite les expriences avec des moteurs CC, des moteurs pas pas,
des servomoteurs et des relais. La carte Pilote Nano est idale pour
les plateforme contrleurs de robotique. La carte facilite la
conduite de servomoteurs en rotation continue ou de 2 moteurs CC
pour la transmission. Elle inclut galement 7 embases pour la
conduite de servomoteurs ou la lecture de priphriques analogiques
tels que des potentiomtres, des acclromtres, des capteurs de
temprature et plus encore. En outre, grce elle, vous pouvez
conduire n'importe quel kit moteur engrenages Tamiya.
Caractristiques : Socle ULN2803 Socle pour pont en H double L293
DEL d'alimentation Alimentation sur bornier vis de 3,5 mm
Connecteur de batterie 2 broches Rgulateur de tension faible chute
(LDO)
http://www.robotshop.com/regulateurs-voltage.htmlhttp://www.robotshop.com/moteurs-reducteurs.htmlhttp://www.robotshop.com/capteurs-de-temperature.htmlhttp://www.robotshop.com/capteurs-accelerometres.htmlhttp://www.robotshop.com/relais-controleurs-led.htmlhttp://www.robotshop.com/servo-moteurs.htmlhttp://www.robotshop.com/moteurs-pas-a-pas.htmlhttp://www.robotshop.com/moteurs-dc.html
-
RESSOURCES C'est quoi le cerveau d'un robotmobile? S23
aThmes de squence 7) Programmer un objet : Comment embarquer de
lintelligence
8 embases pour servomoteur ou E/ S 4 Commutateurs MOSFET haut
rendement Programmation Nano en circuit Bornier vis de sortie de
3,5 mm Rsistance de rappel l'tat haut ou l'tat bas
slectionnable
Programmation de la carte en Basic (ligne de code)
http://www.robotshop.com/resistances-rotatives-lineaires.html
Microcontrleur (extraitde : http://fr.wikipedia.org/)Interface
Robo TX Controller FischertechnikPack dcouverte Groomy + MaqPlusRf.
181085844 bonnes raisons de choisir Groomy
Le botier de commande AutoProg est compos de 8 entres numriques,
4 entres analogiques, 8 sorties numriques, mmoire de programme 600
instructions. L'alimentation est faite par 4 piles ou accus AA.Il
existe une option alimentation externe par bloc secteur rgule en
interne 5 V, 1,2 A maxi.Connexion aux modules par cordons type
jack.
Attention : piles, bloc alimentation externe secteur, cordons de
liaison aux modules, cble de programmation commander part.
Dimension 42 x 108 x 140 mm.
Livr en version kit : circuit imprim perc, composant souder,
pices du botier assembler, visserie.
Temps de montage env. 1 h. 83.27Carte Picaxe High Power 18
Project board - kit - [CHI035][RAX-CHI035]Contrleur de Moteurs CC
BasicATOM Nano Basic Micro Code de produit:RB-Bat-19