Embed Size (px)
Citation preview
Université Mohammed V – Agdal Faculté des Sciences Juridiques,
Economiques et sociales RABAT
http://www.fsjesr.ac.ma
� ا����� � ���� اآ�ال – آ��� ا����م ا�������� وا�����د��
����� وا� اا�! �ط
Filière de Sciences Économiques et de Gestion
Semestre : S4
Module : M 16 (Méthodes Quantitatives IV)
Matière : Algèbre II
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
1111
CCCHHHAAAPPPIIITTTRRREEE 111 ::: RRRÉÉÉSSSOOOLLL UUUTTTIII OOONNN DDD’’’ UUUNNN SSSYYYSSSTTTÈÈÈMMM EEE LLL III NNNÉÉÉAAAIII RRREEE
I- Généralités ........................................................................................................................ 3
I-1 Définition d’un système linéaire .............................................................................................................. 3
I-2 Ecriture matricielle d’un système linéaire ............................................................................................... 3
I-3 Rang d’un système linéaire ...................................................................................................................... 4
II- Utilisation des déterminants ........................................................................................... 4
II-1 Résolution d’un système linéaire de Cramer .......................................................................................... 4
DDééff iinnii ttiioonn dd’’ uunn ssyyssttèèmmee ddee CCrraammeerr ........................................................................................................... 4
RRééssoolluuttiioonn ppaarr ll ’’ iinnvveerrssiioonn ddee llaa mmaattrriiccee dduu ssyyssttèèmmee ................................................................................. 5
RRééssoolluuttiioonn ppaarr llaa mméétthhooddee ddee CCrraammeerr ........................................................................................................ 6
II-2 Résolution d’un système linéaire non de Cramer ................................................................................... 7
RRééssoolluuttiioonn dd’’ uunn ssyyssttèèmmee aavveecc sseeccoonndd mmeemmbbrree ......................................................................................... 8
CCaass ppaarrttiiccuull iieerr dd’’ uunn ssyyssttèèmmee hhoommooggèènnee .................................................................................................. 10
III- Méthode d’échelonnement de Gauss .......................................................................... 12
III-1 Systèmes linéaires échelonnés ............................................................................................................. 12
MMaattrriiccee éécchheelloonnnnééee .................................................................................................................................. 12
SSyyssttèèmmee ll iinnééaaii rree éécchheelloonnnnéé ...................................................................................................................... 13
CCoommppaattiibbii ll ii ttéé dd’’ uunn ssyyssttèèmmee ll iinnééaaii rree éécchheelloonnnnéé ....................................................................................... 13
RRééssoolluuttiioonn dd’’ uunn ssyyssttèèmmee ll iinnééaaii rree éécchheelloonnnnéé ............................................................................................ 14
III-2 Méthode d’échelonnement de Gauss ................................................................................................... 15
RRéédduuccttiioonn dd’’ uunnee mmaattrriiccee àà ssaa ffoorrmmee éécchheelloonnnnééee ..................................................................................... 15
MMaattrriiccee aauuggmmeennttééee dd’’ uunn ssyyssttèèmmee ll iinnééaaii rree ................................................................................................ 16
RRééssoolluuttiioonn dd’’ uunn ssyyssttèèmmee ll iinnééaaii rree ppaarr llaa mméétthhooddee dd’’ éécchheelloonnnneemmeenntt ddee GGaauussss ........................................ 17
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
2222
IV- Valeurs propres et sous espaces propres d’une matrice carrée ................................. 19
IV-1 Définitions d’une valeur propre et d’un vecteur propre associé ......................................................... 19
IV-2 Calcul pratique des valeurs propres et sous espace propres associés. ............................................... 20
V- Système de Leontief ....................................................................................................... 21
V-1 Modèle entrée-sortie de Leontief .......................................................................................................... 21
V-2 Propriétés du système de Leontief......................................................................................................... 21
V-3 Tableau input-output : (exemple) .......................................................................................................... 23

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
3333
III --- GGGééénnnééérrraaallliiitttééésss
II --11 DDééffiinniittiioonn dd’’uunn ssyyssttèèmmee lliinnééaaiirree DDééff iinnii ttiioonn ::
On appelle système linéaire de n équations à m inconnues tout système de la forme :
=++
=++
nmnmn
mm
bxaxa
bxaxaS
LM
L
11
11111
)(
� Les coefficients )11(, mjetniba iij ≤≤≤≤ sont des réels donnés.
� Le n -uplet ),,( 1 nbb L est dit second membre du système )(S .
� mxx ,,1 L sont les inconnues du système.
� Un m -uplet ),,( 1 mxx L de mIR est solution de )(S si elle vérifie lesn équations du système.
� Résoudre )(S c’est décrire l’ensemble de ces solutions. � Le système )(S est compatible s'il admet au moins une solution, sinon )(S est dit incompatible.
� Le système )(S est dit homogène si 01 === nbb L .
EExxeemmppllee ::
�
−=−−+−=−+
=+−+
132202
132)(
4321
321
4321
xxxxxxx
xxxxS est un système linéaire de 3 équations à 4 inconnues
II --22 EEccrriittuurree mmaattrriicciieellllee dd’’uunn ssyyssttèèmmee lliinnééaaiirree
� Tout système linéaire
=++
=++
nmnmn
mm
bxaxa
bxaxaS
LM
L
11
11111
)( peut s’écrire sous la forme matricielle bXA =. ,
avec :
=
nmn
m
aa
aaA
LMMM
L
1
111
,
=
mx
xX M
1
et
=
nb
bb M
1
�
=
⇔
=++
=++
nmnmn
m
nmnmn
mm
b
b
x
x
aa
aa
bxaxa
bxaxaS MM
LMMM
L
LM
L 11
1
111
11
11111
.)(
DDééff iinnii ttiioonn :: ((MMaattrr iiccee dd’’ uunn ssyyssttèèmmee ll iinnééaaii rree))
Soit le système linéaire :
=++
=++
nmnmn
mm
bxaxa
bxaxaS
LM
L
11
11111
)(
� La matrice mjniijaA ≤≤≤≤= 1,1)( s’appelle la matrice du système )(S .
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
4444
EExxeemmppllee ::
−=−−+−=−+
=+−+
132202
132)(
4321
321
4321
xxxxxxx
xxxxS
� La matrice du système )(S est égale à :
−−−−−
=322103121321
A
� L’écriture matricielle du système )(S est alors :
−=
−−−−−
101
.322103121321
4
3
2
1
xxxx
II --33 RRaanngg dd’’uunn ssyyssttèèmmee lliinnééaaiirree DDééff iinnii ttiioonn ::
On appelle le rang d’un système linéaire, celui de sa matrice.
EExxeemmppllee ::
−=−−+−=−+
=+−+
132202
132)(
4321
321
4321
xxxxxxx
xxxxS
� La matrice du système )(S est égale à :
−−−−−
=322103121321
A
� 3)( =Srg car 3)( =Arg : 0221312321
det ≠
−−−−
III III --- UUUtttiiillliiisssaaatttiiiooonnn dddeeesss dddéééttteeerrrmmmiiinnnaaannntttsss
II II --11 RRééssoolluuttiioonn dd’’uunn ssyyssttèèmmee lliinnééaaiirree ddee CCrraammeerr
DDééffiinniittiioonn dd’’uunn ssyyssttèèmmee ddee CCrraammeerr DDééff iinnii ttiioonn ::
Un système linéaire est dit de Cramer si le nombre de ses inconnues m est égal au nombre de ces équations n et est égal à son rang r )( rmn == .
TThhééoorrèèmmee ::
Un système linéaire est de Cramer ssi sa matrice associée est carrée )( mn = et inversible )( nr = . Un système linéaire de Cramer admet une unique solution. L’unique solution d’un système linéaire homogène de Cramer est le vecteur nul.

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
5555
EExxeemmppllee ::
=⇒
=++=++=++
123312231
233223
)(
3321
2321
1321
Abxxxbxxxbxxx
S
� 3== mn A est alors une matrice carrée d’ordre 3.
� 18123312231
det ==A : 0det ≠A et Aest alors une matrice inversible )3( =r .
� Le système )(S est alors un système linéaire de Cramer.
RRééssoolluuttiioonn ppaarr ll’’iinnvveerrssiioonn ddee llaa mmaattrriiccee dduu ssyyssttèèmmee
On propose de résoudre un système linéaire )(S de n équations à n inconnues, écrit sous sa forme matricielle bXA =. .
EEttaappeess ddee llaa rrééssoolluuttiioonn :: � On vérifie si le système )(S est de Cramer :
• Si 0det =A alors le système )(S n’est pas de Cramer.
• Si 0det ≠A alors le système )(S est de Cramer, et on passe à sa résolution.
� Un vecteur X est solution du système )(S ssi bXA =. ssi bAX 1−= car Aest inversible.
• On calcule 1−A : ))((det
11 ACA
A t=−
• bAX .1−= est alors l’unique solution du système )(S . EExxeemmppllee ::
� Le système )(S est donné par :
−=++=++=++
1223632623
)(
321
321
321
xxxxxxxxx
S
� L’écriture matricielle du système )(S est :
−=
1266
123312231
3
2
1
xxx
=123
312
231
A et
−=
12
6
6
b
� le système )(S est de Cramer :
18123312231
det ==A : 0det ≠A A est alors une matrice inversible
� Le vecteur X est solution du système )(S ssi bXA =. ssi bAX 1−= .
� Calcul de 1−A : ))((det
11 ACA
A t=−

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
6666
�
−−
−=⇒
−−
−=
+−+
−+−
+−+
=571157715
))((517751175
1231
3221
3123
2331
1321
1223
2312
1332
1231
)( ACAC t
�
−−
−=
−−
−=−
18/518/718/118/118/518/718/718/118/5
571157715
1811A
� bAX .1−=
−=
−
−−
−=
=⇒
606
1266
.571157715
18
1
3
2
1
xxx
X
�
−=
606
X est alors l’unique solution du système )(S
RRééssoolluuttiioonn ppaarr llaa mméétthhooddee ddee CCrraammeerr
On propose de résoudre un système linéaire )(S de n équations à n inconnues, écrit sous sa forme matricielle bXA =. .
EEttaappeess ddee llaa rrééssoolluuttiioonn ::
� On calcule le déterminant de la matrice A : Adet � Si 0det =A alors le système )(S n’est pas de Cramer. � Si 0det ≠A alors le système )(S est de Cramer, et on passe à sa résolution.
� On calcule les déterminants, dits de Cramer niD
ix ≤≤1, , où ixD est le déterminant de la matrice
A où l’on a remplacé la colonne i par le vecteur b :
=
+−
+−
nnninnin
nii
xaabaa
aabaaD
iLL
MMMMMMM
LL
111
11111111
det , ni ≤≤1
� On calcule le vecteur solution
=
nx
xX M
1
: niA
Dx ix
i ≤≤= 1,det
�
=
A
D
A
D
Xnx
x
det
det1
M est alors l’unique solution du système )(S .

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
7777
EExxeemmppllee ::
� Le système )(S est donné par :
−=++=++=++
1223632623
)(
321
321
321
xxxxxxxxx
S
� L’écriture matricielle du système )(S est :
−=
1266
123312231
3
2
1
xxx
,
=
123312231
A et
−=
1266
b
� le système )(S est de Cramer :
18123312231
det ==A : 0det ≠A A est alors une matrice inversible
� Calcul des déterminants de Cramer 1xD ,
2xD et 3xD :
� 10858126
580120236
1212316236 )1233,122(
1−=−×=−=
−=
+→−→ LLLLLL
xD
� 0530161
5300160261
1123362261 )1333,1222(
2=−−
−−×=−−−−=
−=
−→−→ LLLLLL
xD
� 108307651
3070650631
1223612631 )1333,1222(
3=−−
−−×=−−−−=
−=
−→−→ LLLLLL
xD
� Calcul du vecteur solution
=
3
2
1
xxx
X : ( 31,det/ ≤≤= iADxixi )
� 618108
det1
1 −=−==A
Dx x 0
det2
2 ==A
Dx x
6
18
108
det3
3 ===A
Dx x
�
−=
606
X est alors l’unique solution su système )(S .
II II --22 RRééssoolluuttiioonn dd’’uunn ssyyssttèèmmee lliinnééaaiirree nnoonn ddee CCrraammeerr DDééff iinnii ttiioonn ::
Un système linéaire non cramien ou non de Cramer c’est un système dont le nombre des inconnues m n’est pas égal au nombre des équations n ou dont le nombre des inconnues m est égal au nombre des équations n mais dont le rang r ne leur est pas égal )( mn ≠ ou
)( nretmn ≠= .
EExxeemmpplleess ::
1) ⇒
=+−=−−−=++=+++
2222222222432
)(
31
421
432
4321
xxxxx
xxxxxxx
S
−−−−=
0202201222104321
A et
=
2222
b
� )(S est un système linéaire non de Cramer : )4(MA∈ et 42)( ≠=Arg , )4( nretmn ≠==

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
8888
2) ⇒
=+=−=+−=−+
2232352232
)(
21
32
321
321
xxxx
xxxxxx
S
−−
−=
023350111132
A et
=
2222
b
� Le système )(S est un système linéaire non de Cramer : )3,4(MA∈ , )( mn ≠
RRééssoolluuttiioonn dd’’uunn ssyyssttèèmmee aavveecc sseeccoonndd mmeemmbbrree
On propose de résoudre un système linéaire non de Cramer )(S de n équations à m inconnues, écrit sous sa forme matricielle bXA =. .
=
nmn
m
aa
aaA
LMMM
L
1
111
,
=
mx
xX M
1
et
=
nb
bb M
1
EEttaappeess ddee llaa rrééssoolluuttiioonn ::
� On cherche le rang r de la matrice A : rArg =)( � Si )( rmn == alors le système est un système linéaire de Cramer et sa résolution se fait
par l’une des méthodes développées au paragraphe précédent. � Sinon, le système est alors un système linéaire non de Cramer. Pour le résoudre, on suit
les étapes suivantes.
� On suppose que la matrice rA formée par les r premières lignes et les r premières colonnes de la
matrice A a un déterminant non nul r∆ :
rrr
r
r
mnrnrnn
mrrrrrr
mrrrrrr
mrr
aa
aa
aaaa
aaaaaaaa
aaaa
A,1,
,11,1
,1,,1,
,11,1,11,1
,1,,1,
,11,1,11,1
LMMM
L
LLMMMMMM
LL
LLMMMMMM
LL
=∆⇒
=
+
+++++
+
+
� Cette hypothèse peut toujours être vérifiée, à un changement près de l’ordre des équations
et/ou de l’ordre des inconnues. Elle ne restreint donc pas l’étude qui suit mais en simplifie seulement l’exposé.
� r∆ s’appelle le déterminant principal. On en déduit :
� Les inconnues principales rxx ,,1 L , dont les coefficients sont les colonnes de rA .
� les autres inconnues mr xx ,,1 L+ sont dites non principales ou arbitraires.
� Les équations principales, qui sont les lignes du déterminant principal : ce sont les r premières équations du système.
� Les autres équations sont dites équations non principales.

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
9999
� On écrit les matrices )1,( rnhM h −≤≤ de type )1,1( ++ rr définies par :
rnh
baabaa
baa
M
hrrhrhr
rrrr
r
h −≤≤
=
+++
1,
,1,
,1,
1,11,1
L
LMMMM
L
� Les déterminants des matrices )1,( rnhM h −≤≤ s’appellent les déterminants
caractéristiques du système bXA =. . On note rnhM hh −≤≤=∆ 1),det(
� On vérifie les conditions, dites de compatibilité du système bXA =. : rnhh −≤≤=∆ 1,0
� 1er cas : rnh −≤≤∃1 avec 0≠∆h
� Les équations sont dites incompatibles et le système bXA =. est impossible ou insoluble.
� 2ème cas : rnh −≤≤∀1 , 0=∆h
� Le système est possible. Pour le résoudre, on résout le système formé des r équations principales dont les inconnues sont les inconnues principales et où les inconnues arbitraires sont considérées comme des paramètres et sont ajoutées au second membre du système.
EExxeemmpplleess ::
1) ⇒
−=+−−=−−−
=++=+++
222222
0221432
)(
31
421
432
4321
xxxxx
xxxxxxx
S
−−−−=
0202201222104321
A et
−−=
2201
b
� )4(MA∈ et 22)(2)( =⇒=⇒= rSrgArg
� Un déterminant principal est : 1021
2 =∆ . On en déduit :
� Les inconnues principales : 1x et 2x
� Les inconnues arbitraires : 3x et 4x
� Les équations principales :
=++=+++
0221432
432
4321
xxxxxxx
� Les conditions de compatibilité sont : 21,0 ≤≤=∆ hh
� 0212010121
1 =−−−
=∆ et 0202010121
2 =−−
=∆
� Les conditions de compatibilité sont alors vérifiées et le système est possible.
� Sa résolution revient à résoudre le système de Cramer suivant :
+−=+−=+
)22()43(12
)(342
43211 xxx
xxxxS
� La solution du système )( 1S est donnée par :
+−=−+−=
)22(2)43(1
342
2431
xxxxxxx

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
10101010
� La solution du système )(S est alors égale à l’ensemble :
( ){ }24343231
4321 , ,22,1/),,,()( IRxxxxxxxIRxxxxSE ∈−−=+=∈=
� Vérification :
−=++−−=−−−−+−
=++−−=++−−++
22)1.(222)22()1.(2
022)22(143)22.(2)1(
33
4433
4343
43433
xxxxxx
xxxxxxxxx
2) ⇒
=+−−=−−−
=++=+++
222222
0221432
)(
31
421
432
4321
xxxxx
xxxxxxx
S
−−−−=
0202201222104321
A et
−=2201
b
� )4,4(MA∈ et 22)(2)( =⇒=⇒= rSrgArg
� Un déterminant principal est : 1021
2 =∆ . On en déduit :
� Les inconnues principales : 1x et 2x
� Les inconnues arbitraires : 3x et 4x
� Les équations principales :
=++=+++
0221432
432
4321
xxxxxxx
� Les conditions de compatibilité sont : 21,0 ≤≤=∆ hh
� 0212010121
1 =−−−
=∆ et 04202010121
22 ≠∆⇒=−
=∆
� Les conditions de compatibilité ne sont alors pas vérifiées et le système est impossible.
CCaass ppaarrttiiccuulliieerr dd’’uunn ssyyssttèèmmee hhoommooggèènnee
On propose de résoudre un système linéaire homogène non de Cramer )(S de n équations à m inconnues, écrit sous sa forme matricielle 0. =XA .
EEttaappeess ddee llaa rrééssoolluuttiioonn ::
� On cherche le rang r de la matrice A : rArg =)( � Si )( rmn == alors le système est un système linéaire de Cramer et son unique solution est le
vecteur nul. � Sinon, le système est alors un système linéaire non de Cramer. Pour le résoudre, on suit les
mêmes étapes que pour un système linéaire non de Cramer avec second membre (Les conditions de compatibilité étant toujours vérifiées).
� On cherche le déterminant principal r∆ : rrr
r
raa
aa
,1,
,11,1
LMMM
L
=∆
� On en déduit : � Les r inconnues principales rxx ,,1 L .
� Les rm− inconnues arbitraires mr xx ,,1 L+ .
� Les r équations principales correspondantes à r∆ .

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
11111111
� Les conditions de compatibilité sont toujours vérifiées ( rnhh −≤≤=∆ 1,0 ) :
rnh
aaaa
aa
baabaa
baa
M
rhrhr
rrr
r
hrrhrhr
rrrr
r
hh −≤≤==
==∆
+++++
1,0
00
0
det)det(
,1,
,1,
,11,1
,1,
,1,
1,11,1
L
LMMMM
L
L
LMMMM
L
� On résout le système de Cramer formé par les r équations principales, dont les inconnues sont les r
inconnues principales et où l’on fait passer les rm− inconnues arbitraires au second membre du système bXA =. .
RReemmaarrqquuee ::
♦ La solution de tout système linéaire non de Cramer homogène est un sous espace vectoriel de dimension égale au nombre de ses inconnues arbitraires égale au rang de sa matrice.
EExxeemmppllee ::
⇒
=+−=−−−=++=+++
0220220220432
)(
31
421
432
4321
xxxxx
xxxxxxx
S
−−−−=
0202201222104321
A et
=
0000
b
� )4(MA∈ et 22)(2)( =⇒=⇒= rSrgArg
� Un déterminant principal : 1021
2 =∆ . On en déduit :
� Les inconnues principales : 1x et 2x
� Les inconnues arbitraires : 3x et 4x
� Les équations principales :
=++=+++
0220432
432
4321
xxxxxxx
� Le système étant homogène, les conditions de compatibilité sont vérifiées.
� La résolution du système )(S revient alors à résoudre le système de Cramer suivant :
+−=+−=+
)22()43(2
)(342
43211 xxx
xxxxS
� La solution du système )( 1S est donnée par :
+−=−+−=
)22(2)43(
342
2431
xxxxxxx
� La solution du système 0. =XA est alors égale au sous espace vectoriel :
{ } >−−=<∈−−==∈= )1,0,2,0(),0,1,2,1(),(,22,/),,,()( 24343231
44321 IRxxxxxxxIRxxxxSE
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
12121212
III III III --- MMMéééttthhhooodddeee ddd’’’éééccchhheeelllooonnnnnneeemmmeeennnttt dddeee GGGaaauuussssss
II II II --11 SSyyssttèèmmeess lliinnééaaiirreess éécchheelloonnnnééss
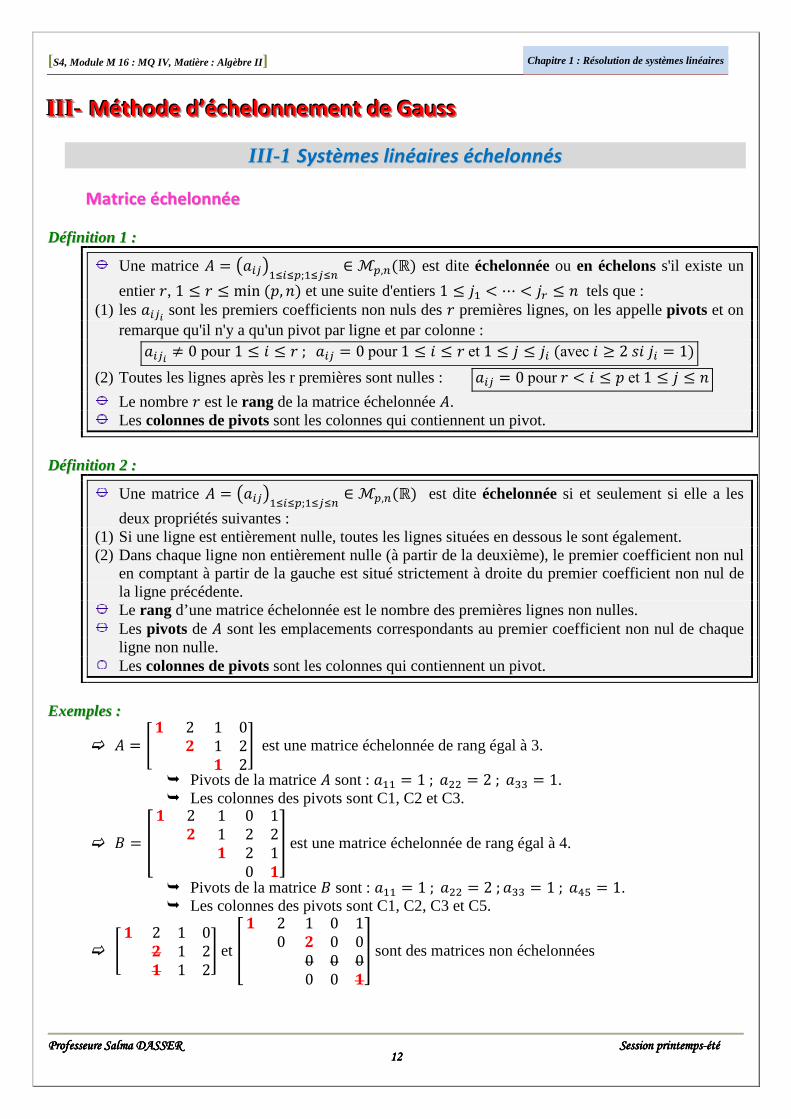
MMaattrriiccee éécchheelloonnnnééee DDééff iinnii ttiioonn 11 ::
Une matrice � � �������;��� �,���� est dite échelonnée ou en échelons s'il existe un
entier �, 1 � � � min ��, �� et une suite d'entiers 1 � �� � � � �� � � tels que : (1) les ��� sont les premiers coefficients non nuls des � premières lignes, on les appelle pivots et on
remarque qu'il n'y a qu'un pivot par ligne et par colonne : ��� ! 0 pour 1 � # � � ; ��� � 0 pour 1 � # � � et 1 � � � �� �avec # $ 2 &# �� � 1�
(2) Toutes les lignes après les r premières sont nulles : ��� � 0 pour � � # � � et 1 � � � �
Le nombre � est le rang de la matrice échelonnée �. Les colonnes de pivots sont les colonnes qui contiennent un pivot.
DDééff iinnii ttiioonn 22 ::
Une matrice � � �������;��� �,���� est dite échelonnée si et seulement si elle a les
deux propriétés suivantes : (1) Si une ligne est entièrement nulle, toutes les lignes situées en dessous le sont également. (2) Dans chaque ligne non entièrement nulle (à partir de la deuxième), le premier coefficient non nul
en comptant à partir de la gauche est situé strictement à droite du premier coefficient non nul de la ligne précédente.
Le rang d’une matrice échelonnée est le nombre des premières lignes non nulles. Les pivots de � sont les emplacements correspondants au premier coefficient non nul de chaque
ligne non nulle. Les colonnes de pivots sont les colonnes qui contiennent un pivot.
EExxeemmpplleess ::
� � � ' ( 2 1 0) 1 2( 2* est une matrice échelonnée de rang égal à 3.
� Pivots de la matrice � sont : ��� � 1 ; �++ � 2 ; �,, � 1. � Les colonnes des pivots sont C1, C2 et C3.
� - � . ( 2 1 0 1) 1 2 2( 2 10 (/ est une matrice échelonnée de rang égal à 4.
� Pivots de la matrice - sont : ��� � 1 ; �++ � 2 ; �,, � 1 ; �01 � 1. � Les colonnes des pivots sont C1, C2, C3 et C5.
� ' ( 2 1 0) 1 2( 1 2* et . ( 2 1 0 10 ) 0 00 0 00 0 (/ sont des matrices non échelonnées
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
13131313
SSyyssttèèmmee lliinnééaaiirree éécchheelloonnnnéé DDééff iinnii ttiioonn ::
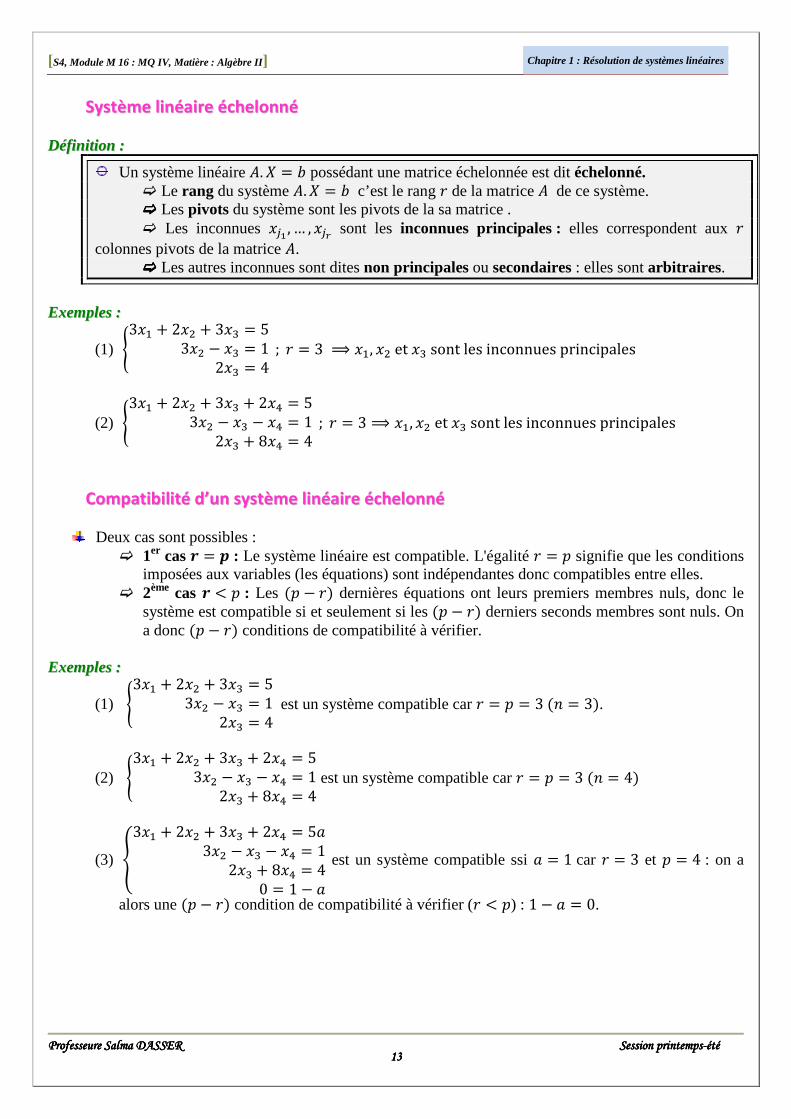
Un système linéaire �. 3 � 4 possédant une matrice échelonnée est dit échelonné. � Le rang du système �. 3 � 4 c’est le rang � de la matrice � de ce système. ���� Les pivots du système sont les pivots de la sa matrice . � Les inconnues 5�6 , … , 5�8 sont les inconnues principales : elles correspondent aux � colonnes pivots de la matrice �. ���� Les autres inconnues sont dites non principales ou secondaires : elles sont arbitraires .
EExxeemmpplleess ::
(1) 935� ; 25+ ; 35, � 535+ = 5, � 125, � 4? ; � � 3 @ 5�, 5+ et 5, sont les inconnues principales
(2) 935� ; 25+ ; 35, ; 250 � 535+ = 5, = 50 � 125, ; 850 � 4? ; � � 3 @ 5�, 5+ et 5, sont les inconnues principales
CCoommppaattiibbiilliittéé dd’’uunn ssyyssttèèmmee lliinnééaaiirree éécchheelloonnnnéé
Deux cas sont possibles : � 1er cas L � M : Le système linéaire est compatible. L'égalité � � � signifie que les conditions
imposées aux variables (les équations) sont indépendantes donc compatibles entre elles. � 2ème cas L � � : Les �� = �� dernières équations ont leurs premiers membres nuls, donc le
système est compatible si et seulement si les �� = �� derniers seconds membres sont nuls. On a donc �� = �� conditions de compatibilité à vérifier.
EExxeemmpplleess ::
(1) 935� ; 25+ ; 35, � 535+ = 5, � 125, � 4? est un système compatible car � � � � 3 �� � 3�.
(2) 935� ; 25+ ; 35, ; 250 � 535+ = 5, = 50 � 125, ; 850 � 4? est un système compatible car � � � � 3 �� � 4�
(3) N35� ; 25+ ; 35, ; 250 � 5�35+ = 5, = 50 � 125, ; 850 � 40 � 1 = �? est un système compatible ssi � � 1 car � � 3 et � � 4 : on a
alors une �� = �� condition de compatibilité à vérifier (� � �) : 1 = � � 0.

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
14141414
RRééssoolluuttiioonn dd’’uunn ssyyssttèèmmee lliinnééaaiirree éécchheelloonnnnéé
On commence par déterminer �, � OP � puis on dresse la liste des cas possibles :
� Si le système n'est pas compatible (les �� = �� conditions de compatibilité ne sont pas vérifiées) : par définition son ensemble de solutions est vide.
� S'il est compatible (les �� = �� conditions de compatibilité sont vérifiées) : On fait passer les inconnues secondaires dans le second membre et on les considère comme des paramètres (on a donc �� = �� paramètres) et on résout le système en commençant par calculer 5� dans la dernière équation et en remontant.
� Dans le cas particulier � � � � �, le système est un système de Cramer, il a une et une
solution (on n’a donc pas de paramètres �� = � � 0�). RReemmaarrqquuee ::
♦ Avant de se lancer dans des calculs, il est important d'avoir une idée sur le type possible de l'ensemble des solutions.
EExxeemmpplleess ::
(1) 935� ; 25+ ; 35, � 535+ = 5, � 125, � 4? est un système compatible.
� (1) est un système de Cramer car � � � � � � 3 : il a donc une unique solution. � On le résout à partir de 5, Q 25, � 4 @ 5, � 2, � puis on remonte :
� 35+ = 5, � 1 @ 35+ � 1 ; 5, @ 5+ � 1 � 35� ; 25+ ; 35, � 5 @ 35� � 5 = 25+ = 35, @ 5� � =1
� L’unique solution du système (1) est alors R�1� � S=1,1,2T .
(2) 93x� ; 2x+ ; 3x, ; 2x0 � 53x+ = x, = x0 � 12x, ; 8x0 � 4? est un système compatible � (2) n’est pas un système de Cramer car ��� 3� � ��� 4� : il a donc une infinité de solutions.
� On a donc à résoudre un système avec un (� = �� paramètres. � On fait passer alors l’inconnue secondaire x0 , qu’on considère comme paramètre, au
second membre dans toutes les équations.
� Le système (2) s’écrit alors sous la forme : 93x� ; 2x+ ; 3x, � 5 = 2x03x+ = x, � 1 ; x02x, � 4 = 8x0?
� On le résout à partir de 5, Q 2x, � 4 = 8x0 @ 5, � 2 = 4x0, � puis on remonte :
� 35+ = 5, � 1 ; x0 @ 35+ � 1 ; 5, ; x0 @ 5+ � 1 = x0 � 35� ; 25+ ; 35, � 5 = 2x0 @ 35� � 5 = 25+ = 35, = 2x0 @ 5� � =1 ; 4x0
� L’ensemble des solutions du système (2) est : R�2� � S�=1 ; 4Y, 1 = Y, 2 = 4Y�, Y �T .

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
15151515
(3) N35� ; 25+ ; 35, � 5�35+ = 5, � 125, � 40 � 1 = �? est un système compatible ssi � � 1
� � � 3 et � � 4 : on a alors une �� = �� condition de compatibilité à vérifier : 1 = � � 0. � � � � � 3 : Quand il est compatible, le système admet une unique solution. � (3) est un système compatible ssi � � 1 :
� Si � � 1 alors R�3� � S=1,1,2T .
� Si � ! 1 alors R�3� � Z .
(4) N35� ; 25+ ; 35, ; 250 � 5�35+ = 5, = 50 � 125, ; 850 � 40 � 1 = �? est un système compatible ssi � � 1
� � � 3 et � � 4 : on a alors une �� = �� condition de compatibilité à vérifier : 1 = � � 0. � � � ��� 4� : Quand il est compatible, le système admet une infinité de solutions. � (4) est un système compatible ssi � � 1 :
� Si � � 1 alors R�4� � S�=1 ; 4Y, 1 = Y, 2 = 4Y�, Y �T .
� Si � ! 1 alors R�4� � Z .
II II II --22 MMéétthhooddee dd’’éécchheelloonnnneemmeenntt ddee GGaauussss
Etant donné un système linéaire, la méthode d’échelonnement de Gauss consiste à construire un système linéaire échelonné équivalent au système donné c.à.d. qui a le même ensemble de solutions ; les systèmes échelonnés étant faciles à résoudre.
Ce qui revient à réduire sa matrice à une matrice échelonnée.
RRéédduuccttiioonn dd’’uunnee mmaattrriiccee àà ssaa ffoorrmmee éécchheelloonnnnééee DDééff iinnii ttiioonn :: ((ooppéérraattiioonn éélléémmeennttaaii rree))
On appelle opération élémentaire sur une matrice une des opérations suivantes : (1) Permuter deux lignes. (2) Multiplier une ligne par un scalaire non nul. (3) Ajouter à une ligne une combinaison linéaire des autres lignes.
DDééff iinnii ttiioonn :: ((mmaattrr iicceess ééqquuiivvaalleenntteess))
On dit que deux matrices � et - de même type sont équivalentes si l’une se déduit de l’autre par une suite finie d’opérations élémentaires. On note �~-.

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
16161616
TThhééoorrèèmmee 11 ::
Toute matrice � peut se réduire à une matrice échelonnée en lignes �\ par une suite d’opérations élémentaires sur les lignes.
On appelle �\ la forme échelonnée en lignes de �. Le rang de la matrice � est égal au rang de sa forme échelonnée �\. Les deux matrices � et sa forme échelonnée �\ sont équivalentes.
EExxeemmpplleess ::
(1) � � ]1 =3 6 22 =5 10 33 =8 17 4` abcabd+a6aecaed,a6fgggggggh ]1 =3 6 20 1 =2 =10 1 =1 =2` aecaedabfggggggh ]1 =3 6 20 1 =2 =10 0 1 =1` � �\ � La matrice �\ est la forme échelonnée de la matrice �. � �i��� � �i��j� � 3
(2) � � ]1 3 21 4 10 1 =1` abcabda6fggggggh ]1 3 20 1 =10 1 =1` aecaedabfggggggh ]1 3 20 1 =10 0 0 ` � �\ � La matrice �\ est la forme échelonnée de la matrice �. � �i��� � �i��j� � 2
MMaattrriiccee aauuggmmeennttééee dd’’uunn ssyyssttèèmmee lliinnééaaiirree DDééff iinnii ttiioonn :: ((ssyyssttèèmmeess ééqquuiivvaalleennttss))
On dit que deux systèmes linéaires sont équivalents s’ils ont le même ensemble de solutions.
DDééff iinnii ttiioonn ::
On appelle matrice augmentée d’un système linéaire �. 3 � 4, sa matrice � augmentée de son second membre 4. On la note ��|4�.
EExxeemmpplleess ::
(1) ]1 3 21 4 10 1 =1l 10=1` est la matrice augmentée du système 95� ; 35+ ; 25, � 15� ; 45+ ; 5, � 05+ = 5, � =1?.
(2) ]1 =3 6 22 =5 10 33 =8 17 4l 10=1` est la matrice augmentée du système 9 5� = 35+ ; 65, ; 250 � 15� = 55+ ; 105, ; 350 � 035� = 85+ ; 175, ; 450 � 1? . TThhééoorrèèmmee ::
Si les matrices augmentées de deux systèmes linéaires sont équivalentes, alors les systèmes linéaires sont équivalents et ont alors le même ensemble de solutions.

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
17171717
RRééssoolluuttiioonn dd’’uunn ssyyssttèèmmee lliinnééaaiirree ppaarr llaa mméétthhooddee dd’’éécchheelloonnnneemmeenntt ddee GGaauussss
La méthode du pivot de Gauss de résolution d'un système linéaire �. 3 � 4 consiste à : (1) Ecrire la matrice augmentée du système ��|4� . (2) Effectuer sur cette matrice des opérations élémentaires dans un ordre bien déterminé de façon
à transformer la matrice � du système en une matrice échelonnée �\. (3) Résoudre le système échelonné �\. 3 � 4\ correspondant, équivalent au système �. 3 � 4.
EExxeemmppllee :: N25� ; 5+ ; 450 � 2=45� = 25+ ; 35, = 750 � =945� ; 5+ = 25, ; 850 � 235+ = 125, = 50 � 2 ? Q � � . 2 1 0 4=4 =2 3 =74 1 =2 80 3 =12 =1/ OP 4 � n 2=922 o
On écrit la matrice augmentée du système (1) : �p � ��|4� � n 2 1 0 4=4 =2 3 =74 1 =2 80 3 =12 =1q 2=922 o
Puis, on commence les étapes d’échelonnement de la matrice �p :
EEttaappee 11 :: ccoonnssiissttee àà cchhooiissii rr llee pprreemmiieerr ppiivvoott eett aannnnuulleerr ttoouuss lleess aauuttrreess ccooeeffff iicciieennttss ddee llaa ccoolloonnnnee qquuii ccoonnttiieenntt ccee ppiivvoott
� 1er pivot ��� � 2
� �p � n 2 1 0 4=4 =2 3 =74 1 =2 80 3 =12 =1q 2=922 o abcabr+a6aecaed+a6fgggggggh n2 1 0 40 0 3 10 =1 =2 00 3 =12 =1q 2=5=22 o � �p��� � �����s4����
EEttaappee 22 :: ccoonnssiissttee àà cchhooiissii rr llee ddeeuuxxiièèmmee ppiivvoott eett aannnnuulleerr ttoouuss lleess aauuttrreess ccooeeffff iicciieennttss ddee llaa ccoolloonnnnee qquuii ccoonnttiieenntt ccee ppiivvoott qquuii ssee ttrroouuvveenntt eenn ddeessssoouuss dduu ppiivvoott
� Au terme de l’étape 1, on a obtenu une matrice dont la première colonne est bien celle d’une matrice échelonnée.
� On va donc conserver cette première colonne ainsi que la première ligne (puisque �������� 2� ! 0) et l’on va appliquer la même démarche à la deuxième colonne.
� On est dans le cas où �++��� � 0, on effectue alors un échange de la ligne 2 et la ligne 3 :
n2 1 0 40 0 3 10 =1 =2 00 3 =12 =1q 2=5=22 o abcaefgggh n2 1 0 40 =1 =2 00 0 3 10 3 =12 =1q 2=2=52 o
� n2 1 0 40 =1 =2 00 0 3 10 3 =12 =1q 2=2=52 o atcatd,abfgggggggh n2 1 0 40 =1 =2 00 0 3 10 0 =6 =1q 2=2=58 o � �p�+� � ���+�s4�+��
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
18181818
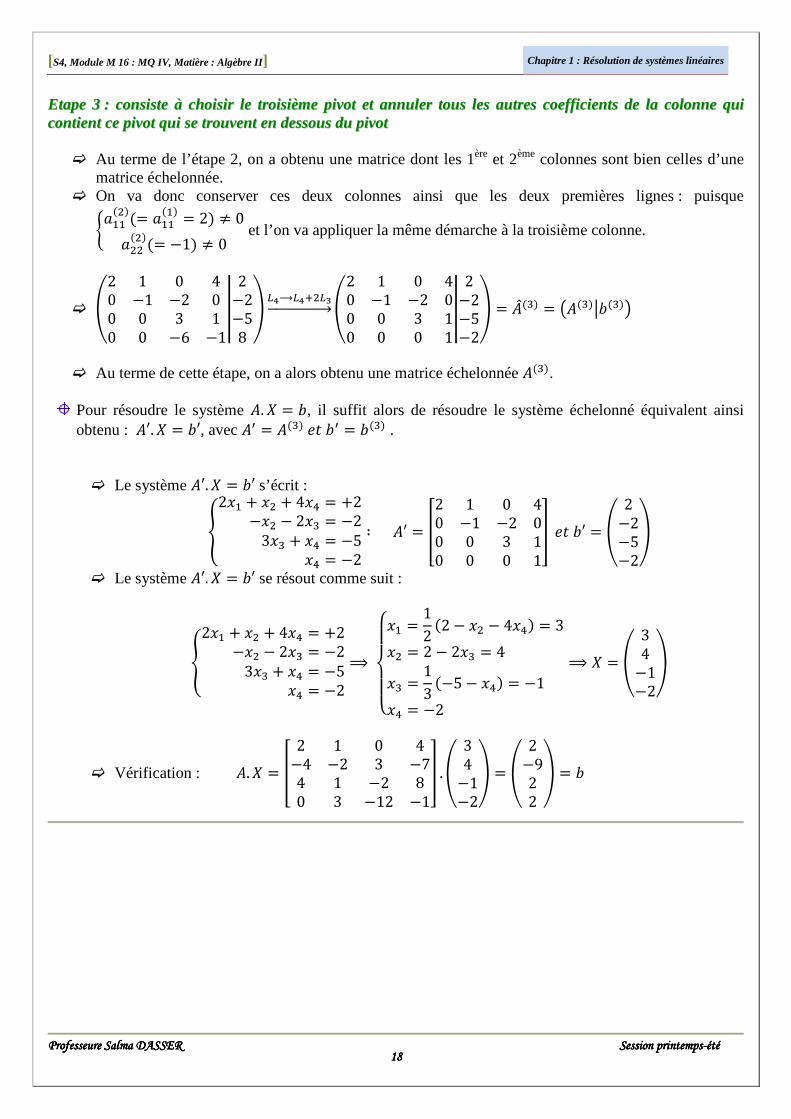
EEttaappee 33 :: ccoonnssiissttee àà cchhooiissii rr llee ttrrooiissiièèmmee ppiivvoott eett aannnnuulleerr ttoouuss lleess aauuttrreess ccooeeffff iicciieennttss ddee llaa ccoolloonnnnee qquuii ccoonnttiieenntt ccee ppiivvoott qquuii ssee ttrroouuvveenntt eenn ddeessssoouuss dduu ppiivvoott
� Au terme de l’étape 2, on a obtenu une matrice dont les 1ère et 2ème colonnes sont bien celles d’une matrice échelonnée.
� On va donc conserver ces deux colonnes ainsi que les deux premières lignes : puisque u����+��� ������ � 2� ! 0�++�+��� =1� ! 0 ? et l’on va appliquer la même démarche à la troisième colonne.
� n2 1 0 40 =1 =2 00 0 3 10 0 =6 =1q 2=2=58 o atcatr+aefgggggggh n2 1 0 40 =1 =2 00 0 3 10 0 0 1q 2=2=5=2o � �p�,� � ���,�s4�,��
� Au terme de cette étape, on a alors obtenu une matrice échelonnée ��,�.
Pour résoudre le système �. 3 � 4, il suffit alors de résoudre le système échelonné équivalent ainsi obtenu : �\. 3 � 4\, avec �j � ��,� OP 4j � 4�,� .
� Le système �\. 3 � 4\ s’écrit :
N25� ; 5+ ; 450 � ;2=5+ = 25, � =235, ; 50 � =550 � =2? Q �\ � .2 1 0 40 =1 =2 00 0 3 10 0 0 1/ OP 4\ � n 2=2=5=2o
� Le système �\. 3 � 4\ se résout comme suit :
N25� ; 5+ ; 450 � ;2=5+ = 25, � =235, ; 50 � =550 � =2? @ vwxwy5� � 12 �2 = 5+ = 450� � 35+ � 2 = 25, � 45, � 13 �=5 = 50� � =150 � =2
? @ 3 � n 34=1=2o
� Vérification : �. 3 � . 2 1 0 4=4 =2 3 =74 1 =2 80 3 =12 =1/ . n 34=1=2o � n 2=922 o � 4

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
19191919
III VVV--- VVVaaallleeeuuurrrsss ppprrroooppprrreeesss eeettt sssooouuusss eeessspppaaaccceeesss ppprrroooppprrreeesss ddd’’’uuunnneee mmmaaatttrrriiiccceee cccaaarrrrrréééeee
II VV--11 DDééffiinniittiioonnss dd’’uunnee vvaalleeuurr pprroopprree eett dd’’uunn vveecctteeuurr pprroopprree aassssoocciiéé DDééff iinnii ttiioonn ::
Soit A une matrice carrée d’ordre n à coefficients réels. � On appelle valeur propre de A toute valeur de λ pour laquelle le système XXA .. λ= admet une
solution non triviale 0≠X . � On appelle vecteur propre associé à la valeur propre λ ces solutions non triviales.
EExxeemmppllee ::
−
−=
111111111
A ,,
=
011
1X ,,
=
110
2X ,,
−=
111
3X
�
=
=
−
−=
011
.2022
011
.111111111
. 1XA : 11 .2. XXA =
� 21=λ est alors une valeur propre de la matrice A .
�
=
011
1X est un vecteur propre de la matrice A associé à la valeur propre 21=λ .
�
=
=
−
−=
110
.2220
110
.111111111
. 2XA : 22 .2. XXA =
�
=
110
2X est un deuxième vecteur propre de la matrice A associé à la même valeur propre 21=λ .
�
−−=
−
−=
−
−
−=
111
).1(111
111
.111111111
. 3XA : 33 ).1(. XXA −=
� 12 −=λ est alors une autre valeur propre de la matrice A .
�
−=
111
3X est un vecteur propre de la matriceA associé à la valeur propre 12 −=λ .

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
20202020
II VV--22 CCaallccuull pprraattiiqquuee ddeess vvaalleeuurrss pprroopprreess eett ssoouuss eessppaaccee pprroopprreess aassssoocciiééss.. TThhééoorrèèmmee 11 :: (valeur propre)
Soit A une matrice carrée d’ordre n à coefficients réels. � λ est une valeur propre de la matrice A ssi : 0).det( =− IA λ
� ).det( IA λ− s’appelle le polynôme caractéristique de la matrice A , on le note )(λAP . � Le produit de toutes les valeurs propres de la matrice A est égal au déterminant de la matrice. � La somme de toutes les valeurs propres de la matrice A est égale à la trace de la matrice.
Calculer les valeurs propres d’une matrice A revient à résoudre l’équation 0).det( =− IA λ .
TThhééoorrèèmmee 22 :: (vecteur propre)
Soit A une matrice carrée d’ordre n à coefficients réels. � L’ensemble de tous les vecteurs propres d’une matrice carrée d’ordre n à coefficients réels,
associés à une même valeur propre λ est un sous espace vectoriel de nIR . � On l’appelle le sous espace propre associé à la valeur propre λ et on le note λE .
� λE est le sous espace vectoriel solution du système nXIA 0)..( =− λ : ).(dim IArgnE λλ −−=
� λλ kE ≤dim , λk étant le degré de multiplicité de λ .
Pour chaque valeur propre λ deA , déterminer le sous espace propre associé revient alors à résoudre le
système linéaire (non de cramer car 0).det( =− IA λ ) : nXIA 0)..( =− λ .
EExxeemmpplleess ::
♦ [ ]1324−=A : )5)(2()( +−= λλλAP ,
−==
− )1,2()3,1(
5
2
EE
♦ [ ]3221
−−=A : 2)1()( += λλAP , )1,1(1 −=−E
♦ [ ]1121
−−=A : 1)( 2 += λλAP
♦
−
−=
111111111
A : 2)2)(1()( −+−= λλλAP ,
−=−=−
)1,0,1(),0,1,1()1,1,1(
2
1
EE
♦
−−−
−=
124526437
A : 2)1)(2()( −−−= λλλAP ,
−==
)0,2,1()2,1,1(
1
2
EE
♦
−−−=
111100010
A : )1)(1()( 2 ++−= λλλAP , )1,1,1(1 −=−E
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
21212121
VVV--- SSSyyyssstttèèèmmmeee dddeee LLLeeeooonnntttiiieeefff
VV--11 MMooddèèllee eennttrrééee--ssoorrttiiee ddee LLeeoonnttiieeff
On considère une économie qui se compose de n secteurs S1,…,Sn . � Chaque secteur est supposé produire un seul bien. � Chacun de ces secteurs consomme une partie des biens produits par tous les secteurs. � Pour produire une unité du bien j, le secteur Sj a besoin de aij unités du bien i. � Si qj désigne la quantité de production en bien j du secteur Sj, alors la demande totale intérieure
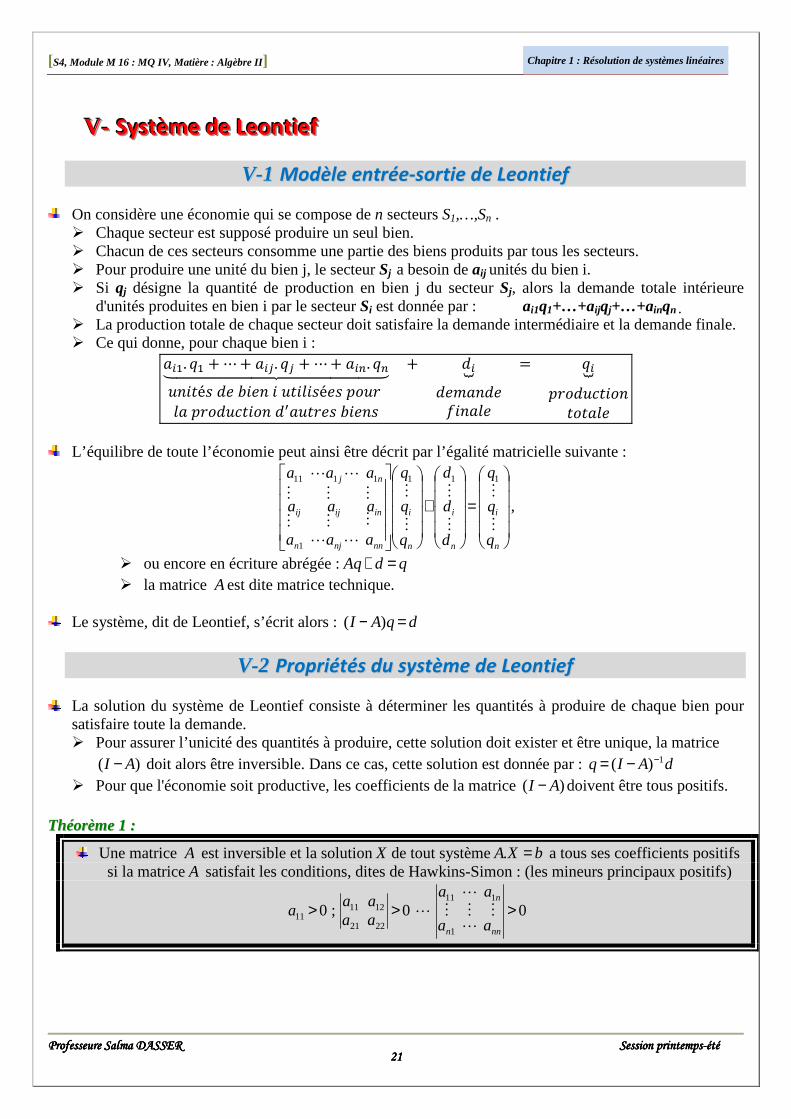
d'unités produites en bien i par le secteur Si est donnée par : ai1q1+…+aijqj+…+ainqn . � La production totale de chaque secteur doit satisfaire la demande intermédiaire et la demande finale. � Ce qui donne, pour chaque bien i : ���. z� ; � ; ���. z� ; � ; ���. z�{||||||||||}||||||||||~ ; ��� � z����#Pé& �O 4#O� # �P#�#&éO& ���� �� ������P#�� �j��P�O& 4#O�& �O����O�#���O ������P#��P�P��O
L’équilibre de toute l’économie peut ainsi être décrit par l’égalité matricielle suivante :
=
+
n
i
n
i
n
i
nnnjn
inijij
nj
q
q
q
d
d
d
q
q
q
aaa
aaa
aaa
M
M
M
M
M
M
LL
M
M
M
M
M
M
LL 111
1
1111
,
� ou encore en écriture abrégée : qdAq =+ � la matrice Aest dite matrice technique.
Le système, dit de Leontief, s’écrit alors : dqAI =− )(
VV--22 PPrroopprriiééttééss dduu ssyyssttèèmmee ddee LLeeoonnttiieeff
La solution du système de Leontief consiste à déterminer les quantités à produire de chaque bien pour satisfaire toute la demande. � Pour assurer l’unicité des quantités à produire, cette solution doit exister et être unique, la matrice
)( AI − doit alors être inversible. Dans ce cas, cette solution est donnée par : dAIq 1)( −−= � Pour que l'économie soit productive, les coefficients de la matrice )( AI − doivent être tous positifs.
TThhééoorrèèmmee 11 ::
Une matrice A est inversible et la solutionX de tout système bXA =. a tous ses coefficients positifs si la matriceA satisfait les conditions, dites de Hawkins-Simon : (les mineurs principaux positifs)
00;01
111
2221
121111 >>>
nnn
n
aa
aa
aaaa
aL
MMM
L
L

[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
22222222
TThhééoorrèèmmee 22 ::
Une matrice )( AI − est inversible et la solution X de tout système bXAI =− ).( a tous ses coefficients positifs si les coefficients de la matrice A vérifient les conditions :
{ }njaan
jijij ,,1,1et0
1
K∈∀<≥ ∑=
EExxeemmppllee ::
� Supposons que l'économie d'une certaine région dépend de trois industries: S1, S2 et S3. En surveillant les opérations de ces trois secteurs, on a tiré les observations suivantes :
� Pour produire une unité de S1, S1 doit consommer 0,3 unités de S1 , 0,3 unités de S2 et 0,3 unités de S3 . � Pour produire une unité de S2, S2 doit acheter 0,4 unités de S1, utiliser 0,1 unités de S2 et 0,4 unités de S3. � S3 consomme 0,3 unités de S1, 0,4 unités de S2 et de 0,2 unités de S3 pour produire une unité de S3.
� Supposons également que pendant une période d'une semaine, l'économie a une demande extérieure de 50.000 unités de S1, 75.000 unités de S2 et 125.000 unités de S3.
(1) L’équilibre de cette économie peut être traduit par l’égalité matricielle :
=
+
3
2
1
3
2
1
000.125000.75000.50
2,04,03,04,01,04,03,03,03,0
qqq
qqq
(2) La matrice des coefficients techniques correspondante :
2,04,03,04,01,04,03,03,03,0
(3) Le vecteur de la demande extérieure :
000.125000.75000.50
(4) Le système de Leontief dqAI =− )( correspondant :
=
−−−−−
000.125000.75000.50
8,04,03,04,09,04,03,03,07,0
3
2
1
qqq
(5) Solution du système dqAI =− )( est donnée par :
=
951,22 121 804,88 237 609,76 225
3
2
1
qqq
(6) Le niveau de production de chacun des trois secteurs pour satisfaire les demandes est alors :
3
2
1
S de unités 22951121 S de unités 88804237 S de unités 76609225
, , ,
[S4, Module M 16 : MQ IV, Matière : Algèbre II] Chapitre 1 : Résolution de systèmes linéaires
Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Professeure Salma DASSER Session printempsSession printempsSession printempsSession printemps----étéétéétéété
23232323
VV--33 TTaabblleeaauu iinnppuutt--oouuttppuutt :: ((eexxeemmppllee))
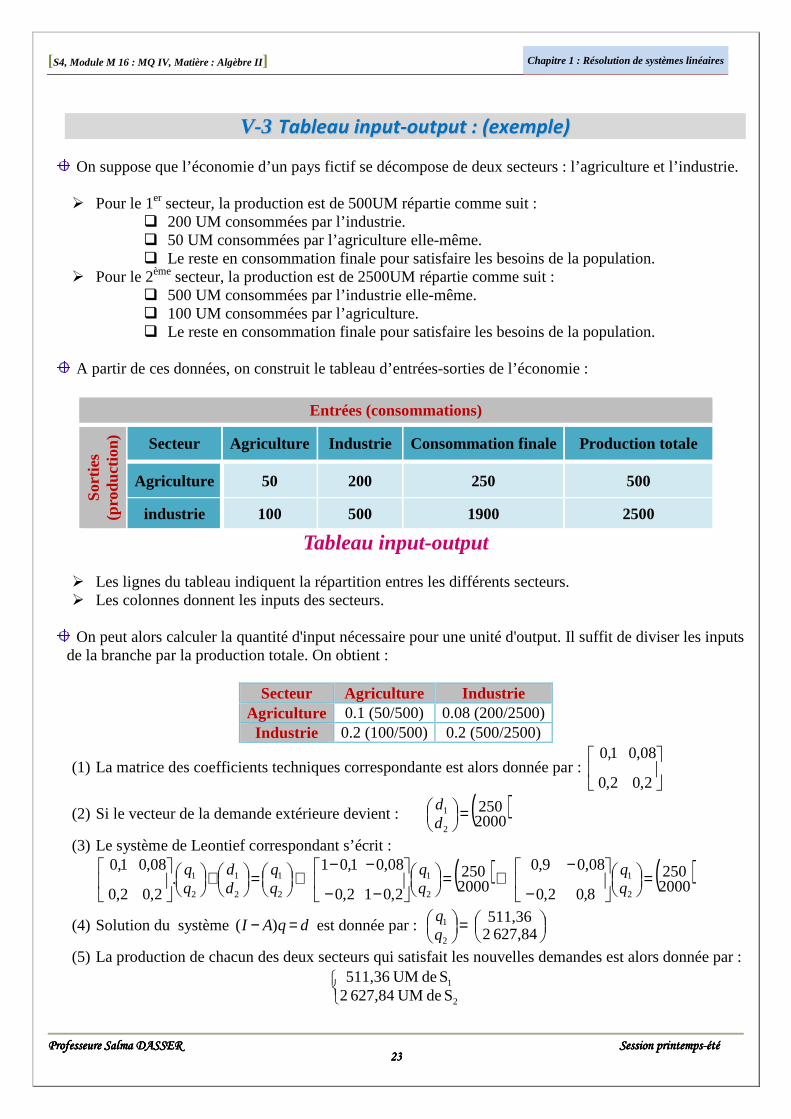
On suppose que l’économie d’un pays fictif se décompose de deux secteurs : l’agriculture et l’industrie. � Pour le 1er secteur, la production est de 500UM répartie comme suit :
� 200 UM consommées par l’industrie. � 50 UM consommées par l’agriculture elle-même. � Le reste en consommation finale pour satisfaire les besoins de la population.
� Pour le 2ème secteur, la production est de 2500UM répartie comme suit : � 500 UM consommées par l’industrie elle-même. � 100 UM consommées par l’agriculture. � Le reste en consommation finale pour satisfaire les besoins de la population.
A partir de ces données, on construit le tableau d’entrées-sorties de l’économie :
Entrées (consommations)
Sor
ties
(pro
duct
ion)
Secteur Agriculture Industrie Consommation finale Production totale
Agriculture 50 200 250 500
industrie 100 500 1900 2500
Tableau input-output
� Les lignes du tableau indiquent la répartition entres les différents secteurs. � Les colonnes donnent les inputs des secteurs.
On peut alors calculer la quantité d'input nécessaire pour une unité d'output. Il suffit de diviser les inputs de la branche par la production totale. On obtient :
Secteur Agriculture Industrie
Agriculture 0.1 (50/500) 0.08 (200/2500) Industrie 0.2 (100/500) 0.2 (500/2500)
(1) La matrice des coefficients techniques correspondante est alors donnée par :
2,02,0
08,01,0
(2) Si le vecteur de la demande extérieure devient : ( )2000250
2
1 =
dd
(3) Le système de Leontief correspondant s’écrit :
( ) ( )2000250
8,02,0
08,09,02000250
2,012,0
08,01,01.
2,02,0
08,01,0
2
1
2
1
2
1
2
1
2
1 =
−
−⇔=
−−
−−⇔
=
+
dd
(4) Solution du système dqAI =− )( est donnée par :
=
627,84 2511,36
2
1
(5) La production de chacun des deux secteurs qui satisfait les nouvelles demandes est alors donnée par :
2
1
S de UM627,84 2S de UM511,36





























