Embed Size (px)
Citation preview
Auteurs: CAYRON Antoine, SAADAOUI Khalil
COMMENT Dany, RALAINARIVO Ylann
Superviseurs: Pierre WILHELM, Sébastien BUSTAMANTE
Responsable: Dr Pénélope LEYLAND
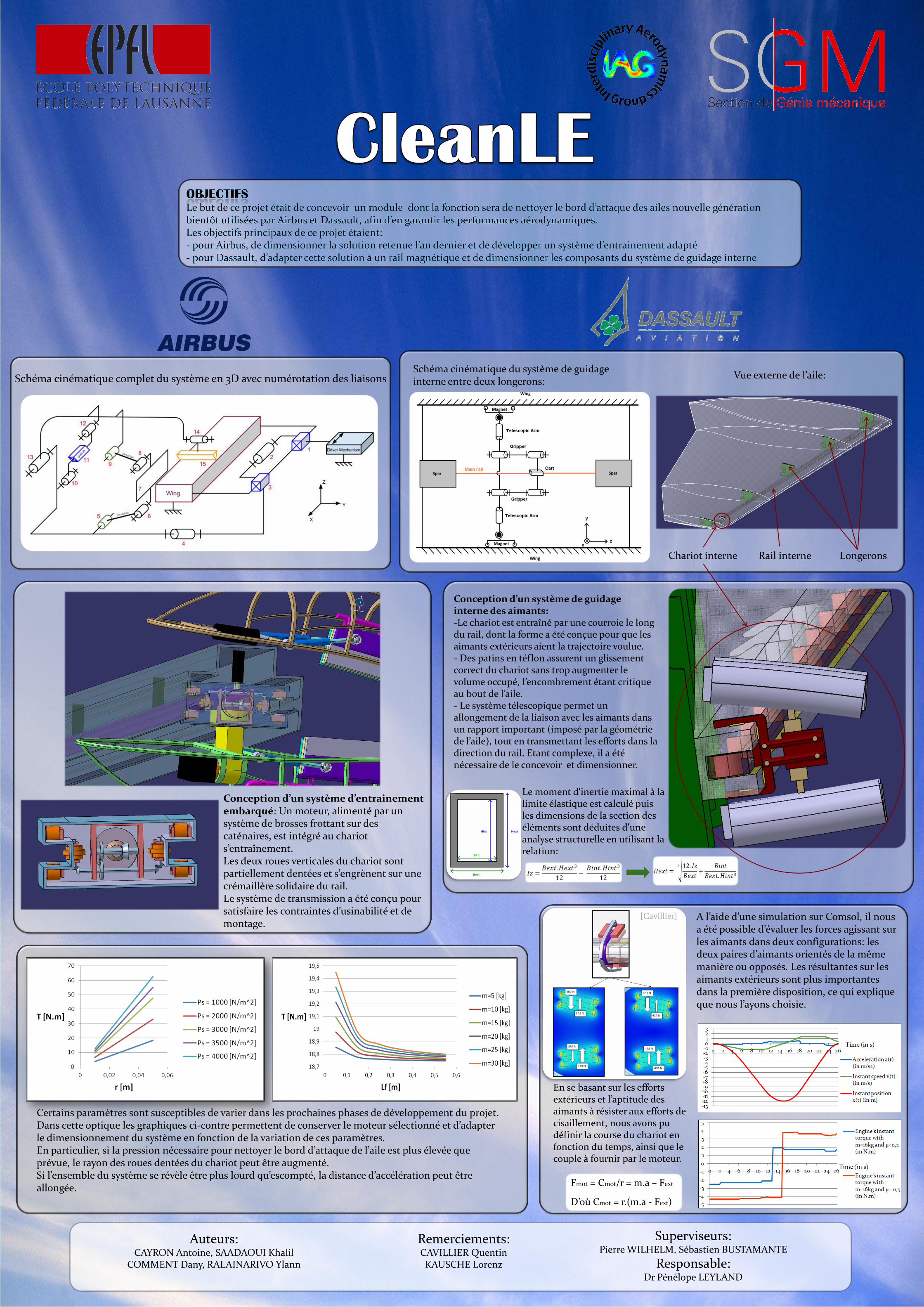
Schéma cinématique complet du système en 3D avec numérotation des liaisons
Conception d’un système d’entrainement embarqué: Un moteur, alimenté par un système de brosses frottant sur des caténaires, est intégré au chariot s’entraînement. Les deux roues verticales du chariot sont partiellement dentées et s’engrènent sur une crémaillère solidaire du rail. Le système de transmission a été conçu pour satisfaire les contraintes d’usinabilité et de montage.
Certains paramètres sont susceptibles de varier dans les prochaines phases de développement du projet. Dans cette optique les graphiques ci-contre permettent de conserver le moteur sélectionné et d’adapter le dimensionnement du système en fonction de la variation de ces paramètres. En particulier, si la pression nécessaire pour nettoyer le bord d’attaque de l’aile est plus élevée que prévue, le rayon des roues dentées du chariot peut être augmenté. Si l’ensemble du système se révèle être plus lourd qu’escompté, la distance d’accélération peut être allongée.
Remerciements: CAVILLIER Quentin KAUSCHE Lorenz
Schéma cinématique du système de guidage interne entre deux longerons:
Vue externe de l’aile:
Longerons Rail interne Chariot interne
Conception d’un système de guidage interne des aimants: -Le chariot est entraîné par une courroie le long du rail, dont la forme a été conçue pour que les aimants extérieurs aient la trajectoire voulue. - Des patins en téflon assurent un glissement correct du chariot sans trop augmenter le volume occupé, l’encombrement étant critique au bout de l’aile. - Le système télescopique permet un allongement de la liaison avec les aimants dans un rapport important (imposé par la géométrie de l’aile), tout en transmettant les efforts dans la direction du rail. Etant complexe, il a été nécessaire de le concevoir et dimensionner.
Le moment d'inertie maximal à la limite élastique est calculé puis les dimensions de la section des éléments sont déduites d'une analyse structurelle en utilisant la relation:
A l’aide d’une simulation sur Comsol, il nous a été possible d’évaluer les forces agissant sur les aimants dans deux configurations: les deux paires d’aimants orientés de la même manière ou opposés. Les résultantes sur les aimants extérieurs sont plus importantes dans la première disposition, ce qui explique que nous l’ayons choisie.
Fmot = Cmot/r = m.a – Fext
D’où Cmot = r.(m.a - Fext)
En se basant sur les efforts extérieurs et l’aptitude des aimants à résister aux efforts de cisaillement, nous avons pu définir la course du chariot en fonction du temps, ainsi que le couple à fournir par le moteur.
Time (in s)
[Cavillier]



















![© [C.Esnouf], [2011], INSA de Lyon, tous droits réservés 2011 SGM Auteur : ESNOUF Claude CLYM Séminaire 10 Imagerie par diffusion incohérente : HAADF (STEM)](https://img.pdfslide.fr/doc/110x75/551d9d81497959293b8bb1b8/-cesnouf-2011-insa-de-lyon-tous-droits-reserves-2011-sgm-auteur-esnouf-claude-clym-seminaire-10-imagerie-par-diffusion-incoherente-haadf-stem.jpg)









