Embed Size (px)
Citation preview
LYCEE CHAPTAL
TD
PTSI
Séquence 4
Liaisons entre les solides
CPGE
PTSI/PT*
Demie
classe
B2 - Proposer un modèle G1 - Élaborer, rechercher et traiter des informations
3h
2017/2018
Schématisation cinématique
Sciences Industrielles
pour l’Ingénieur
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page2sur10
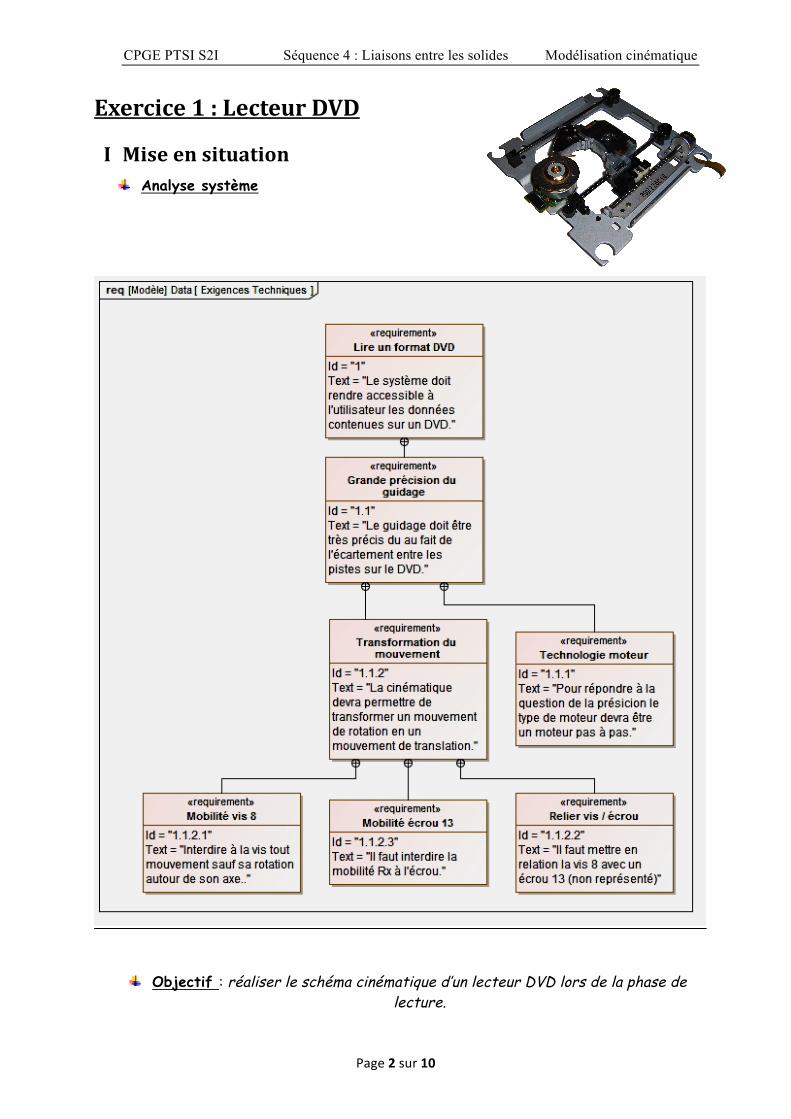
Exercice1:LecteurDVD
I Miseensituation Analyse système
Objectif : réaliser le schéma cinématique d’un lecteur DVD lors de la phase de lecture.
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page3sur10
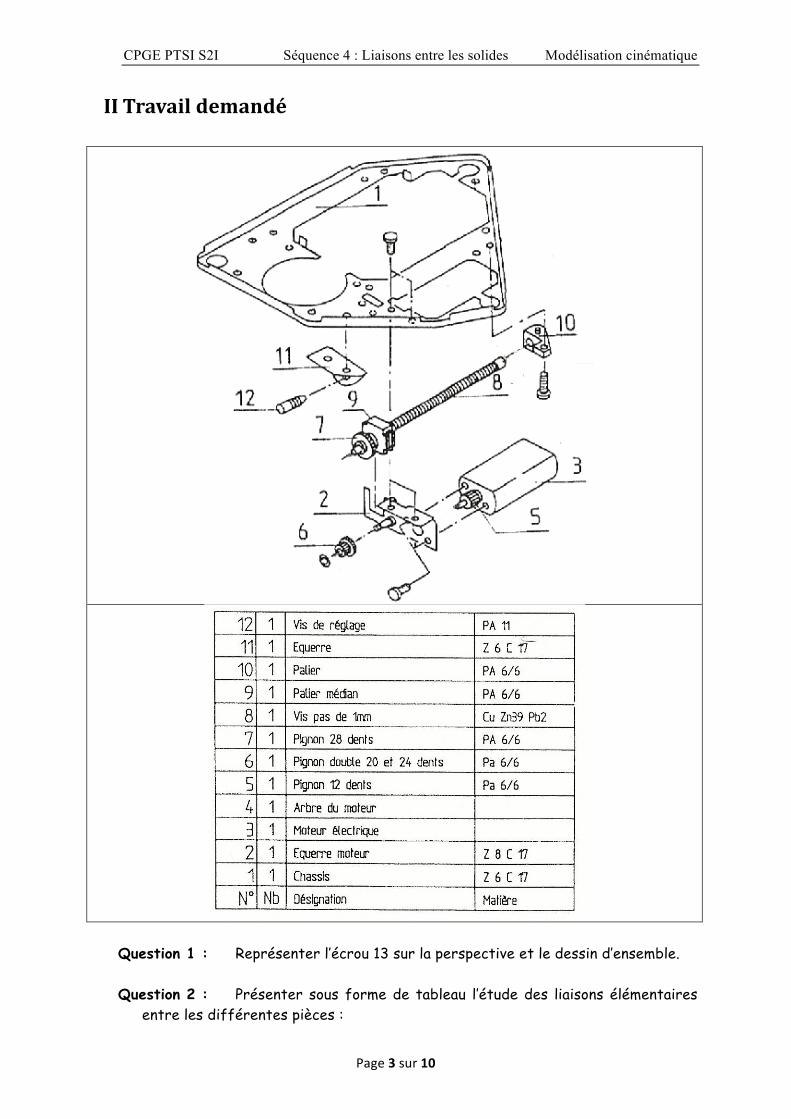
II Travaildemandé
Question 1 : Représenter l’écrou 13 sur la perspective et le dessin d’ensemble.
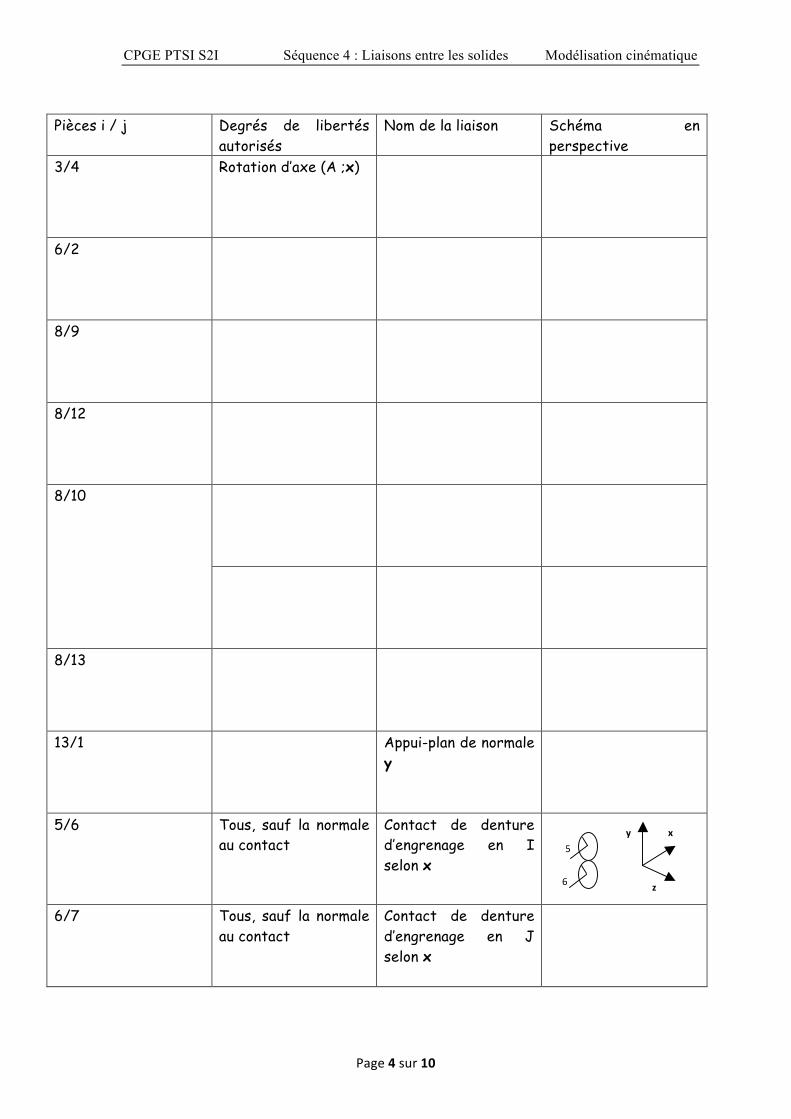
Question 2 : Présenter sous forme de tableau l’étude des liaisons élémentaires entre les différentes pièces :
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page4sur10
Pièces i / j Degrés de libertés
autorisés Nom de la liaison Schéma en
perspective 3/4 Rotation d’axe (A ;x)
6/2
8/9
8/12
8/10
8/13
13/1 Appui-plan de normale y
5/6 Tous, sauf la normale au contact
Contact de denture d’engrenage en I selon x
6/7 Tous, sauf la normale
au contact Contact de denture d’engrenage en J selon x
5
6
y x
z
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page5sur10
Question 3 : Quel est le degré de liberté autorisé par l’association 8/9, 8/12 et 8/10 ? Quelle est la liaison globale équivalente à cette association ?
Question 4 : Colorier sur le plan d’ensemble, dans toutes les vues, les classes
d’équivalence cinématique (CEC) : A = {1 ; 2 …………………………………………………….} en blanc B = {5, …………………………………………………….} en bleu A = {6 …………………………………………………….} en rouge A = {7 …………………………………………………….} en vert A = {13 …………………………………………………….} en marron
Question 5 : Quel est le rôle de la vis 12 ?
Question 6 : Tracer le graphe des liaisons entre les CEC.
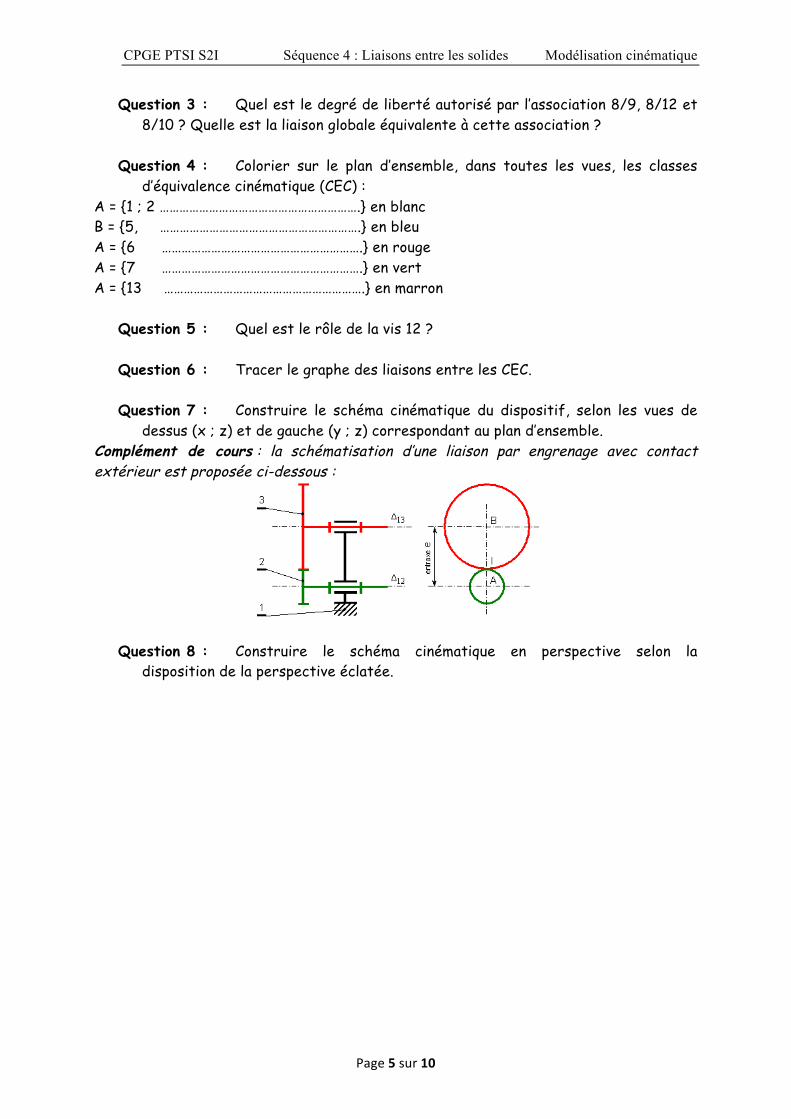
Question 7 : Construire le schéma cinématique du dispositif, selon les vues de dessus (x ; z) et de gauche (y ; z) correspondant au plan d’ensemble.
Complément de cours : la schématisation d’une liaison par engrenage avec contact extérieur est proposée ci-dessous :
Question 8 : Construire le schéma cinématique en perspective selon la disposition de la perspective éclatée.
CPG
E PT
SI S
2I
Séqu
ence
4 :
Liai
sons
ent
re le
s so
lides
M
odél
isat
ion
ciné
mat
ique
Page6su
r10
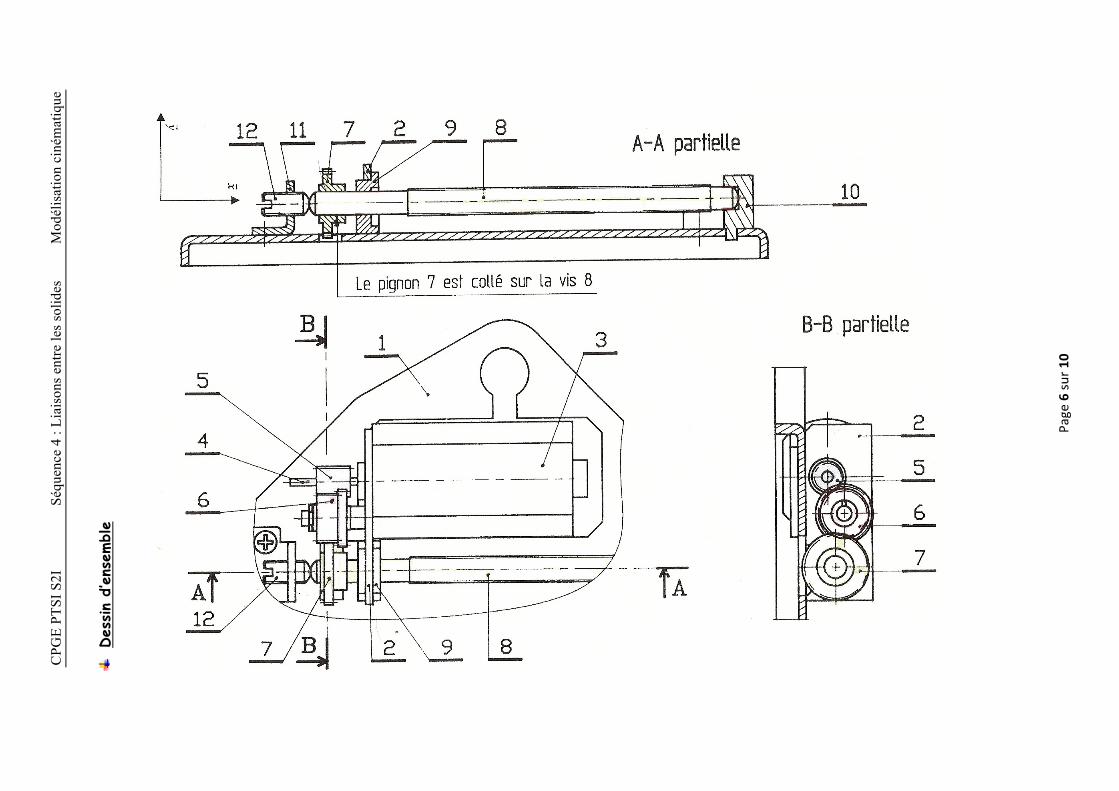
Des
sin
d’en
sembl
e
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page7sur10
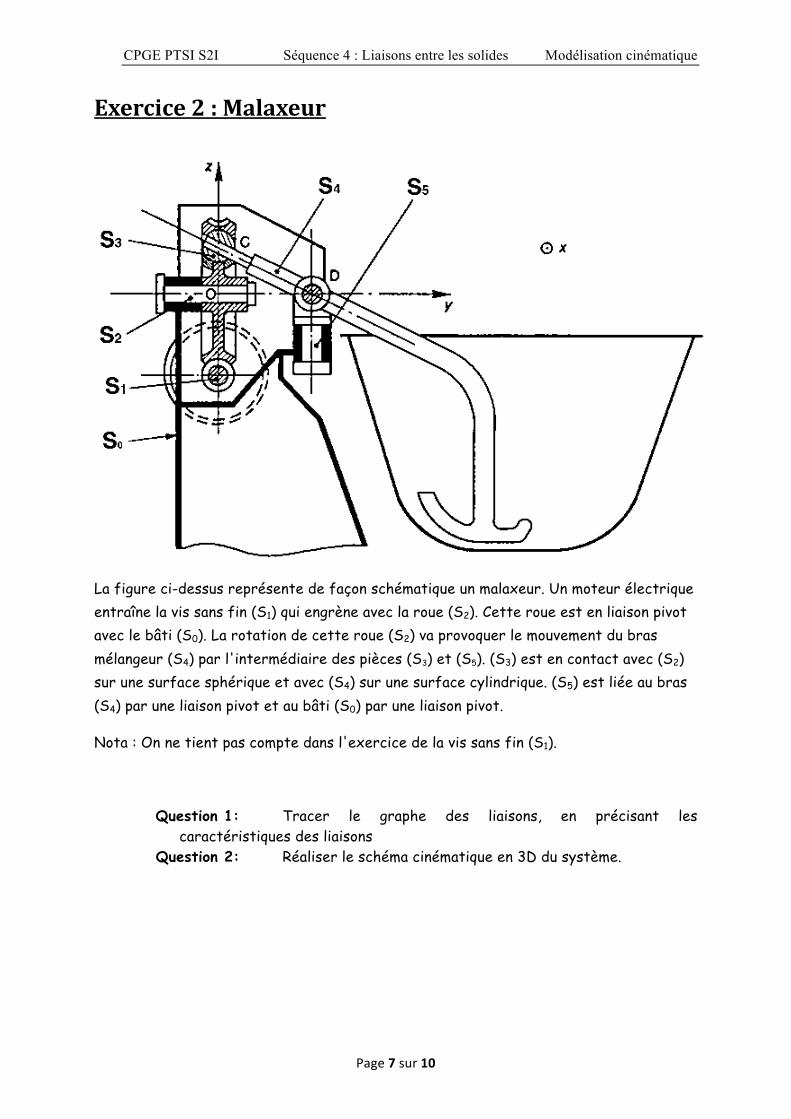
Exercice2:Malaxeur
La figure ci-dessus représente de façon schématique un malaxeur. Un moteur électrique entraîne la vis sans fin (S1) qui engrène avec la roue (S2). Cette roue est en liaison pivot avec le bâti (S0). La rotation de cette roue (S2) va provoquer le mouvement du bras mélangeur (S4) par l'intermédiaire des pièces (S3) et (S5). (S3) est en contact avec (S2) sur une surface sphérique et avec (S4) sur une surface cylindrique. (S5) est liée au bras (S4) par une liaison pivot et au bâti (S0) par une liaison pivot.
Nota : On ne tient pas compte dans l'exercice de la vis sans fin (S1).
Question 1: Tracer le graphe des liaisons, en précisant les caractéristiques des liaisons
Question 2: Réaliser le schéma cinématique en 3D du système.
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page8sur10
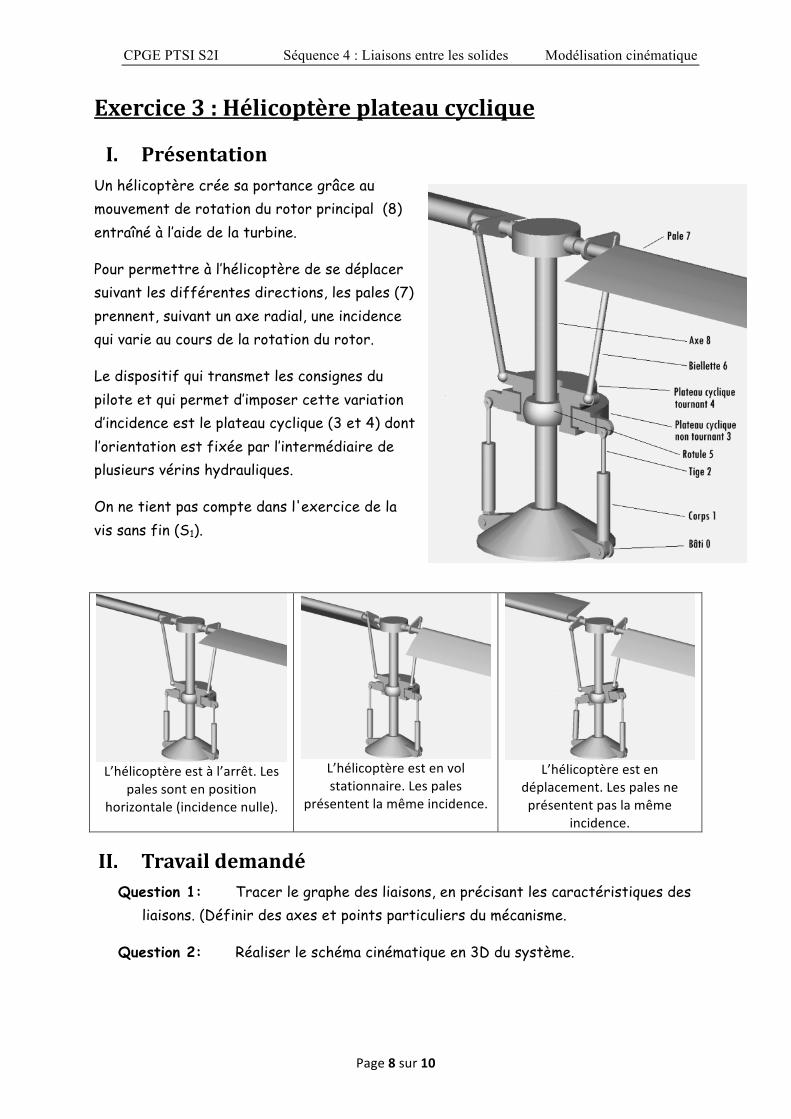
Exercice3:Hélicoptèreplateaucyclique
I. PrésentationUn hélicoptère crée sa portance grâce au mouvement de rotation du rotor principal (8) entraîné à l’aide de la turbine.
Pour permettre à l’hélicoptère de se déplacer suivant les différentes directions, les pales (7) prennent, suivant un axe radial, une incidence qui varie au cours de la rotation du rotor.
Le dispositif qui transmet les consignes du pilote et qui permet d’imposer cette variation d’incidence est le plateau cyclique (3 et 4) dont l’orientation est fixée par l’intermédiaire de plusieurs vérins hydrauliques.
On ne tient pas compte dans l'exercice de la vis sans fin (S1).
L’hélicoptèreestàl’arrêt.Les
palessontenpositionhorizontale(incidencenulle).
L’hélicoptèreestenvolstationnaire.Lespales
présententlamêmeincidence.
L’hélicoptèreesten
déplacement.Lespalesneprésententpaslamême
incidence.
II. TravaildemandéQuestion 1: Tracer le graphe des liaisons, en précisant les caractéristiques des
liaisons. (Définir des axes et points particuliers du mécanisme.
Question 2: Réaliser le schéma cinématique en 3D du système.
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page9sur10
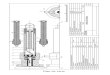
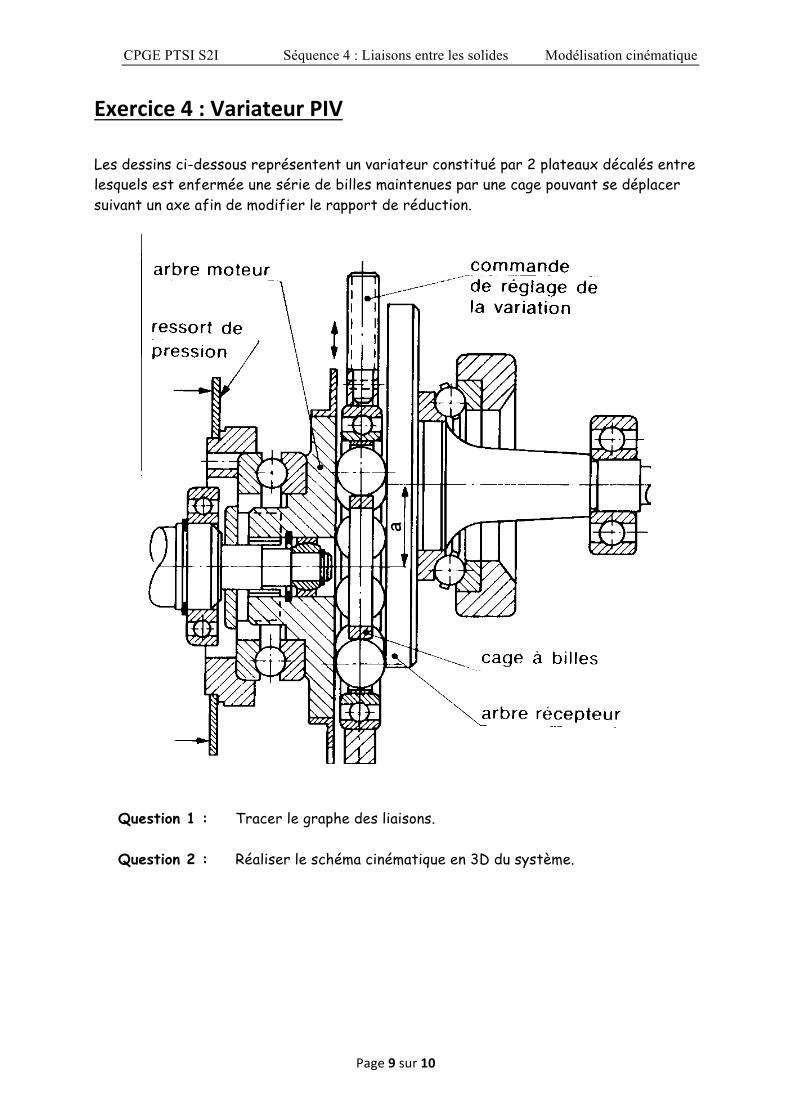
Exercice4:VariateurPIV Les dessins ci-dessous représentent un variateur constitué par 2 plateaux décalés entre lesquels est enfermée une série de billes maintenues par une cage pouvant se déplacer suivant un axe afin de modifier le rapport de réduction.
Question 1 : Tracer le graphe des liaisons.
Question 2 : Réaliser le schéma cinématique en 3D du système.
CPGE PTSI S2I Séquence 4 : Liaisons entre les solides Modélisation cinématique
Page10sur10
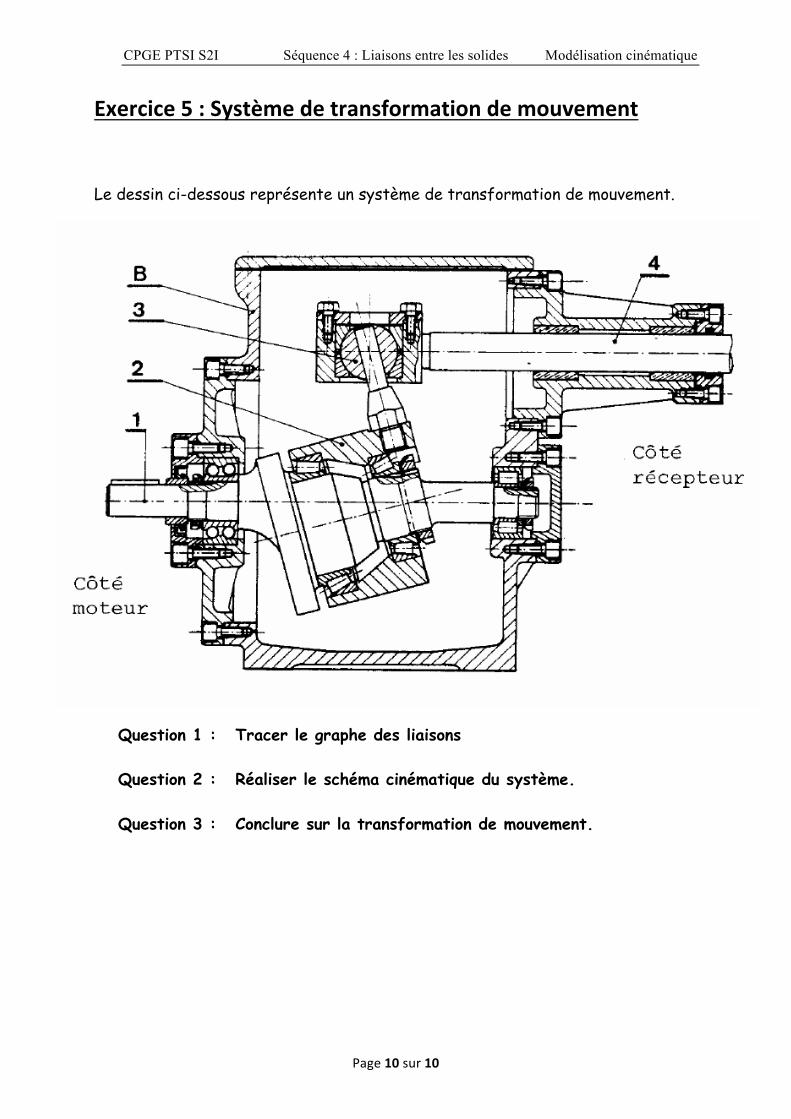
Exercice5:Systèmedetransformationdemouvement
Le dessin ci-dessous représente un système de transformation de mouvement.
Question 1 : Tracer le graphe des liaisons
Question 2 : Réaliser le schéma cinématique du système.
Question 3 : Conclure sur la transformation de mouvement.