Embed Size (px)
Citation preview

SCI 123 / OUV 120 : Modélisation & Simulation
Thème : Tra�c Autoroutier - Transport et Di�usion
Becheras Rémi (OUV 120)Université Joseph Fourier
Soutenance le 25 Janvier 2008
1

Table des matières
1 Introduction 3
2 Structure des notations, introduction des variables et paramètres 5
2.1 Choix de notations & hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Variables d'état (ou variables signi�catives) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Construction des modèles mathématiques 7
3.1 Loi de Conservation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.1.1 Variation du nombre de véhicules exprimé en fonction du �ux . . . . . . . . . . . . . . . . . . 73.1.2 Variation du nombre de véhicules exprimé en fonction de la densité . . . . . . . . . . . . . . . 73.1.3 Mise en relation de la densité et du �ux de véhicules, et mise en évidence de la loi de conservation 8
3.2 Lois de Comportement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2.1 Équation de Transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2.2 Équation de Di�usion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2.3 Convection-Di�usion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4 Discrétisation et modèles informatiques 12
4.1 Discrétisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124.1.1 Modèle du transport convectif avec vitesse constante . . . . . . . . . . . . . . . . . . . . . . . 124.1.2 Modèle du transport convectif avec vitesse variable . . . . . . . . . . . . . . . . . . . . . . . . 134.1.3 Modèle de di�usion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.2 Programmation sur SciLab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2.1 Modèle du transport convectif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2.2 Modèle de di�usion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2.3 Modèle mixte : Di�usion-Convection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5 Simulations via SciLab et analyse des résultats 18
5.1 Résultats de Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185.1.1 Résultats de la simulation du modèle à vitesse constante . . . . . . . . . . . . . . . . . . . . 185.1.2 Résultats de la simulation du modèle à vitesse variable . . . . . . . . . . . . . . . . . . . . . . 185.1.3 Résultats de la simulation du modèle de di�usion pure . . . . . . . . . . . . . . . . . . . . . . 185.1.4 Résultats de la simulation du modèle de di�usion-convection . . . . . . . . . . . . . . . . . . 21
5.2 Quelques mots de plus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.2.1 Explosion du modèle de transport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.2.2 Petite amélioration du modèle de di�usion-convection . . . . . . . . . . . . . . . . . . . . . . 22
6 Conclusion 23
2

Chapitre 1
Introduction
Nous souhaitons dans le cadre de ce thème, construire un modèle simple pouvant décrire la circulation d'auto-mobiles sur une portion d'autoroute.Pour modéliser le tra�c autoroutier, on peut adopter au moins deux points de vue : l'un consiste a suivre chacun desvéhicules présents sur le réseau routier, tandis que l'autre consiste a suivre l'évolution du nombre de véhicules
sur des petites portions de route.Dans cette seconde approche, on ne s'intéresse pas tant au comportement individuel de chacun des véhicules,
mais plutôt a une évolution � moyenne �. La première approche est clairement plus précise, mais beaucoup plusdi�cile a mettre en oeuvre car elle requiert la connaissance (et donc sur un ordinateur, le stockage) d'un grandnombre de données (la position et la vitesse de tous les véhicules à chaque instant). A l'inverse, la seconde approche,est moins précise mais plus facile a implémenter dans un ordinateur. On ne stocke, à chaque instant, que ladensité de véhicules sur une portion d'autoroute.
Aussi nôtre objectif est de décrire l'état d'une section d'autoroute en fonction de certaines conditions initiales,dans un certain intervalle de temps, donc nous nous concentrerons plutôt sur la seconde approche etprocéderons par étapes en simpli�ant le phénomène au maximum dans un premier temps, puis en essayant de lerendre plus complexe, et donc plus réaliste, ou plus général, par la suite. A chaque étape, nous écrirons un modèle
mathématique caractéristique de nos considérations hypothétiques, puis nous le transcrirons en langage SciLab1
en le discrétisant.Scilab est un logiciel libre, développé à l'INRIA Rocquencourt2. C'est un environnement de calcul numérique
qui permet d'e�ectuer rapidement toutes les résolutions et représentations graphiques couramment rencontrées enmathématiques appliquées. Une grande quantité de documentation est fournit en français et en anglais [2]. SciLabnous servira donc à simuler nôtre modèle mathématique, et ainsi avoir une idée de sa valeur heuristique (au moinsqualitativement) concernant la circulation autoroutière.
Comme nous le verrons au chapitre 3, les modèles mathématiques que nous utiliserons sont des systèmes
d'équations aux dérivées partielles (EDP), c'est dire que la grandeur que l'on souhaite observer (disons ϕ(~x, t))est décrite comme solution d'une équation dans laquelle on écrit que que sa dérivée partielle par rapport à l'une deses variables est une fonction de ces autres dérivées partielles : par exemple, à l'ordre 1,
∂ϕ
∂~x(~x, t) = f
(∂ϕ
∂t(~x, t)
)Un tel modèle pourra nous renseigner sur la répartition des véhicules dans le temps sur une partie d'autoroute,
ou sur la répartition dans l'espace à un instant donné, ainsi que sur les vitesses en jeu en fonction de ces répartitions.On pourra alors � prévoir � les conditions favorisant l'apparition de bouchons, ou de circulation optimale.
Bien que l'expérimentation, pour valider ou invalider les modèles envisagés par la suite, soit plus aisée quede tester un modèle biochimique par exemple, nous ne pourrons pas pour autant mettre en oeuvre une telle dé-
1SciLab est une contraction de Scienti�c Laboratory2Téléchargeable gratuitement [1]
3
CHAPITRE 1. INTRODUCTION 4
marche. Ainsi nous nous contenterons d'observer les résultats des simulations et d'en déduire qualitativement etsubjectivement s'il sont, plus ou moins réalistes.
Après avoir, dans le chapitre 2, déclarées nos notations et nos variables d'états, nous établirons au chapitre 3nos modèles mathématiques, puis nous rendrons compte de nos simulations sur SciLab dans le chapitre 4. Dans ledernier chapitre (6), nous conclurons en tentant de di�érencier explicitement un modèle d'une simulation.
Voyons maintenant plus en détail comment construire introduire le problème.
Chapitre 2
Structure des notations, introduction des
variables et paramètres
2.1 Choix de notations & hypothèses
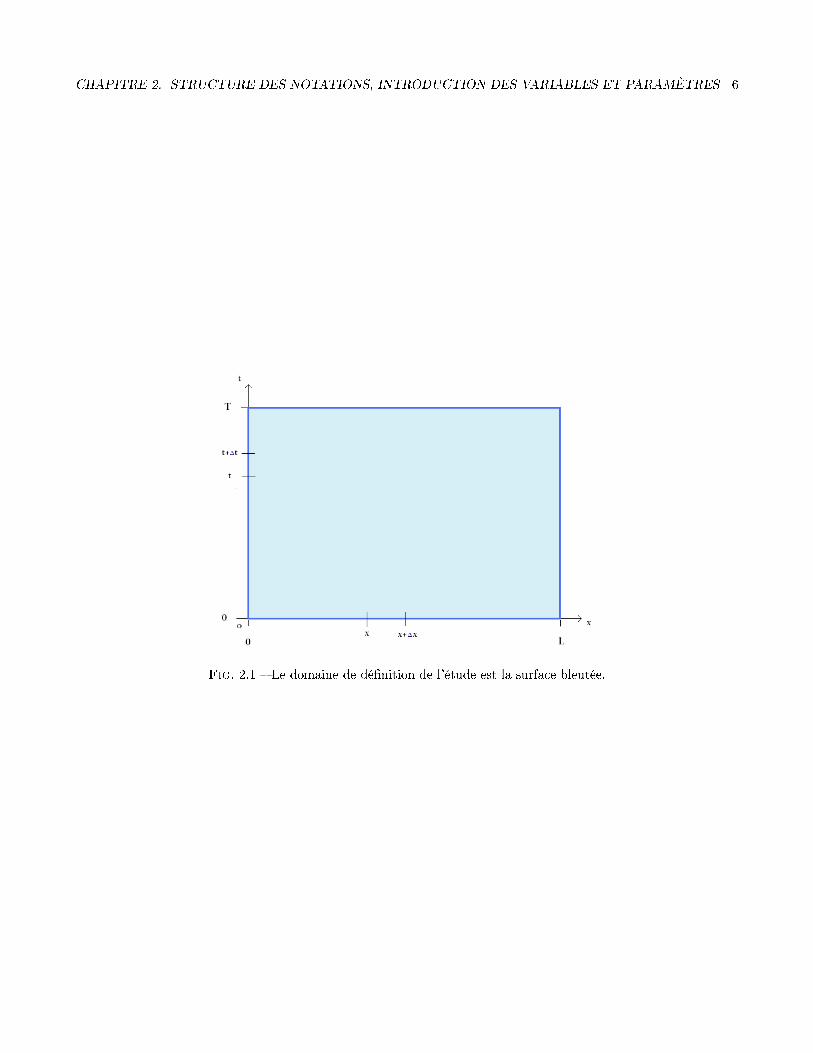
Tout au long de ce document, nous considérerons une portion d'autoroute de longueur L, et nous prendronscomme unité le km.Nous prendrons un repère spatial unidimensionnel Ox, et x représentera donc l'abscisse considéré.Nous prendrons toujours comme origine des temps t0 = 0 et comme origine des abscisses x0 = 0, et nous supposeronsque les véhicules ce déplacent dans le sens des x croissants. On choisira la minute (min) comme unité de temps.La portion d'autoroute sera donc dé�nit par {x|x ∈ [0, L]} et l'intervalle de temps correspondant à l'étude sera]0, T ].Le domaine de dé�nition de l'étude est illustré sur la �gure 2.1 .Nous nous représenterons cette portion d'autoroute comme ayant un nombre de voies constant.
2.2 Variables d'état (ou variables signi�catives)
On notera N∆x(x, t) le nombre de voitures située dans l'intervalle I∆x(x) = [x, x+ ∆x], avec ∆x > 0, à l'instantt, et N∆t(x, t) le nombre de voiture qui passent en x dans l'intervalle I∆t(t) = [t, t+ ∆t], avec ∆t > 0On peut noter que N∆x(x, t) ne nous renseigne pas de façon signi�cative sur l'état de la route car il dépend del'intervalle I∆x(x) que l'on considère, de même que N∆t(x, t) dépend de l'intervalle I∆t(t) choisit. Pour palier ceproblème, nous choisirons donc plutôt de diviser ses grandeurs par leur intervalle respectif, et donc de représenterla densité linéiqueρ(x, t) et le �ux q(x, t) (ou débit) de véhicules à l'abscisse x et au temps t, comme variablessigni�catives pour décrire l'état de l'autoroute, qui ont respectivement comme unités km−1 et min−1. On auradonc, en passant au continu :
ρ(x, t) = lim∆x→0
N∆x(x, t)∆x
(2.1)
et
q(x, t) = lim∆t→0
N∆t(x, t)∆t
(2.2)
5
CHAPITRE 2. STRUCTURE DES NOTATIONS, INTRODUCTION DES VARIABLES ET PARAMÈTRES 6
Fig. 2.1 � Le domaine de dé�nition de l'étude est la surface bleutée.
Chapitre 3
Construction des modèles mathématiques
Comme énoncé à la section 2.2, nous avons la densité (linéique1) ρ (en km−1) et le �ux q (en min−1) commevariables signi�catives. Nôtre modèle mathématique visera donc à relier ses deux grandeurs dans un système d'équa-tions.
3.1 Loi de Conservation
Premièrement, on supposera qu'aucun véhicule ne � disparaît � spontanément dans des intervalles [x, x+ ∆x]et [t, t+ ∆t]. Ainsi, le nombre de véhicules ne varie qu'a condition que des véhicules entrent sur l'autoroute en x oune sortent en x+ ∆x, pendant le laps de temps [t, t+ ∆t].
3.1.1 Variation du nombre de véhicules exprimé en fonction du �ux
En reprenant les notations introduites à la section 2.1, on peut écrire que le nombre de voitures N∆t(x, t) entréessur I∆x(x) pendant I∆t(t) est
N∆t(x, t) =ˆ t+∆t
t
q(x, u) · du
De même, le nombre de voitures N∆t(x+ ∆x, t) sorties de I∆x(x) pendant I∆t(t) est
N∆t(x+ ∆x, t) =ˆ t+∆t
t
q(x+ ∆x, u) · du
La variation du nombre de voitures ∆N dans I∆x(x) × I∆t(t) est donc donné par la di�érence entre les sorties etles entrées, donc par
∆N =ˆ t+∆t
t
q(x, u) · du−ˆ t+∆t
t
q(x+ ∆x, u) · du (3.1)
3.1.2 Variation du nombre de véhicules exprimé en fonction de la densité
Indépendamment du constat précédent, il est évident que la variation du nombre de voiture ∆N pendant I∆t(t)et dans I∆x(x) est la di�érence entre le nombre de voitures N∆x(x, t + ∆t) dans I∆x(x) en l'instant t + ∆t et le
1Nous considérerons tout au long du document la densité linéique, car nous traitons un problème unidirectionnel
7
CHAPITRE 3. CONSTRUCTION DES MODÈLES MATHÉMATIQUES 8
nombre de voitures N∆x(x, t) en l'instant t.Or, par dé�nition de la densité, on a
N∆x(x, t) =ˆ x+∆x
x
ρ(s, t) · ds (3.2)
et ∆t plus tard on a
N∆x(x, t+ ∆t) =ˆ x+∆x
x
ρ(s, t+ ∆t) · ds (3.3)
Ainsi, pendant l'intervalle de temps ∆t considéré, on peut exprimer la variation du nombre de voitures par∆N = N∆x(x, t+ ∆t)−N∆x(x, t), ce qui nous donne
∆N =ˆ x+∆x
x
ρ(s, t+ ∆t) · ds−ˆ x+∆x
x
ρ(s, t) · ds (3.4)
3.1.3 Mise en relation de la densité et du �ux de véhicules, et mise en évidence dela loi de conservation
D'après les équations 3.1 et 3.4, on obtient l'équation
ˆ t+∆t
t
q(x, u) · du−ˆ t+∆t
t
q(x+ ∆x, u) · du =ˆ x+∆x
x
ρ(s, t+ ∆t) · ds−ˆ x+∆x
x
ρ(s, t) · ds
où on s'aperçoit que l'on peut faire appel aux dérivées partielles, car en divisant chaque membre par ∆x∆t, et enrassemblant les intégrales de mêmes bornes, on obtient
1∆x∆t
(ˆ t+∆t
t
(q(x, u)− q(x+ ∆x, u)) · du
)=
1∆x∆t
(ˆ x+∆x
x
(ρ(s, t+ ∆t)− ρ(s, t)) · ds
)1
∆t
ˆ t+∆t
t
q(x, u)− q(x+ ∆x, u)∆x
·du =1
∆x
ˆ x+∆x
x
ρ(s, t+ ∆t)− ρ(s, t)∆t
· ds
Ici on supposera que ρ(x, t) et q(x, t) sont de classes C2, ce qui nous permet de faire tendre ∆x et ∆t vers 0, etd'obtenir
lim∆x→0
q(x, t)− q(x+ ∆x, t)∆x
= − ∂q∂x
(x, t) (3.5)
et
lim∆t→0
ρ(x, t+ ∆t)− ρ(x, t)∆t
=∂ρ
∂t(x, t) (3.6)
et d'en déduire l'expression du principe de conservation de la � masse � :
∂q
∂x(x, t) = −∂ρ
∂t(x, t) (3.7)

CHAPITRE 3. CONSTRUCTION DES MODÈLES MATHÉMATIQUES 9
3.2 Lois de Comportement
L'équation 3.7 nous donne une première relation entre nos variables signi�catives. Cependant, les fonctions q etρ nous sont tout à fait inconnues, nous avons donc besoin d'une seconde relation (di�érente) entre q(x, t) et ρ(x, t).Nous devons à ce stade faire une hypothèse supplémentaire, décrivant le comportement de ses fonctions l'une enversl'autre, mettant en scène la notion de transport, de déplacement.
Nous pouvons par exemple supposer que le �ux dépend de la densité, ou encore qu'il dépend de la variation dedensité. Ceci est arbitraire, et on peut faire toutes sortes d'hypothèses. Cependant, ces deux hypothèses conduisentrespectivement à l'équation de transport et à l'équation de di�usion, qui représentent deux systèmes dy-namiques di�érents, mais qui, comme nous le verrons au chapitre 4, peuvent être rassemblées, pour relativementbien rendre compte (en choisissant les bons paramètres) du comportement du tra�c autoroutier, ou par exemple ladispersion d'un polluant dans une rivière (avec des paramètres di�érents).
3.2.1 Équation de Transport
On peut traduire notre première hypothèse, à savoir que le �ux de véhicules dépend de la densité, de lamanière suivante
q(x, t) = f (ρ (x, t))
où f est une fonction quelconque de la densité ρ.
Transport avec vitesse constante. Supposons que f est linéaire. On a alors
f (ρ (x, t)) = c · ρ(x, t) (3.8)
Calculons les termes de l'équation 3.7 :
∂q
∂x(x, t) =
∂ρ
∂x(x, t) · ∂f
∂ρ(ρ (x, t)) (3.9)
∂ρ
∂t(x, t) = − ∂q
∂x(x, t) = −∂ρ
∂x(x, t) · ∂f
∂ρ(ρ (x, t)) (3.10)
or, d'après l'équation 3.8, on a∂f
∂ρ(ρ (x, t)) = c (3.11)
d'où l'équation de transport avec c la vitesse de transport
∂ρ
∂t(x, t) = −c · ∂ρ
∂x(x, t) (3.12)
Ici on peut considérer un second cas : c peut être une constante, comme traitée ci-dessus (équation 3.12) ou unevariable.
Transport avec vitesse variable. Il parait clair que considérer c comme variable est plus réaliste. On proposecomme expression de c(x, t), une fonction dans laquelle on introduit une vitesse maximale cM , et on fait dépendrec(x, t) de la densité, ce qui est assez réaliste pour une autoroute. On aura donc c(x, t) = c(ρ(x, t)) ∈ [0, CM ] et onécrira
c = cM
(1− ρ(x, t)
ρM
)(3.13)

CHAPITRE 3. CONSTRUCTION DES MODÈLES MATHÉMATIQUES 10
où ρM est la densité maximale de véhicules supportées par l'autoroute2.D'après cette expression de c, on voit que si la densité en x et en t est égale à la densité maximale supportée parl'autoroute, alors c = 0, se qui traduit assez bien le phénomène des embouteillages. D'autre part, plus la densitédiminue, plus la vitesse peut augmenter.
Ainsi l'équation 3.8 devient
f (ρ (x, t)) = cM
(1− ρ(x, t)
ρM
)ρ(x, t) = cMρ(x, t)− cM
ρMρ2(x, t)
et donc l'équation 3.11 devient quand à elle
∂f
∂ρ(ρ (x, t)) = cM − 2cM
cMρM
ρ(x, t) (3.14)
et l'équation de transport 3.12 devient �nalement, pour notre seconde loi de comportement :
∂ρ
∂t(x, t) = −∂ρ
∂x(x, t) · cM
(1− 2ρ(x, t)
ρM
)(3.15)
Les équations 3.12 et 3.15 re�ètent donc deux systèmes dynamiques distinct, la première étant plus simplisteque la seconde. Elles constituent une formalisation complète de nos hypothèses de comportement et du principede conservation, sous forme d'équations aux dérivées partielles. Ainsi elles caractérisent complètement nos deuxmodèles mathématiques.
Conditions aux limites, conditions initiales. Bien que ces équations soit tout à fait précises et su�santespour décrire la dynamique du phénomène, il faut ajouter des conditions initiales et aux limites pour pouvoirrésoudre un système particulier parmi toutes les fonctions-solutions possibles. Dé�nir ces conditions supplémentaires(arbitrairement) nous permettra de simuler nos modèles. Cependant ces conditions ne sont que des � fonctions-
paramètres � : Elles distinguent un cas particulier d'un autre. On notera� Conditions Initiales : ρ(x, 0) = ρ0(x) ∀x ∈ [0, L]� Conditions aux limites : ρ(0, t) = ρ0(t) ∀t ∈ [0, T ]
3.2.2 Équation de Di�usion.
Supposons maintenant que le �ux est une fonction (ϕ) de la variation de densité, plutôt qu'une fonction (f) dela densité elle même. On peut écrire
q(x, t) = ϕ
(∂ρ
∂x(x, t)
)Supposons de plus que ϕ est linéaire. On introduit donc un coe�cient dit de di�usion (α) et on écrit
ϕ
(∂ρ
∂x(x, t)
)= −α∂ρ
∂x(x, t)
On a ajouté un signe moins devant le coe�cient de di�usion pour rendre compte du fait que dans un phénomènede di�usion (par exemple une boule de gaz de type A se di�usant dans un autre de type B), le �ux de matière (oude concentration de A) est orienté vers la densité minimale. Ceci constitue la première loi de Fick.
2ρM pourrait être une fonction de la largeur de la route...

CHAPITRE 3. CONSTRUCTION DES MODÈLES MATHÉMATIQUES 11
En réutilisant le principe de conservation dénoté par l'équation 3.7, on en déduit l'équation de di�usion,appelée aussi équation de la chaleur :
∂ρ
∂t(x, t) = α
∂2ρ
∂x2(x, t) (3.16)
Conditions initiales et aux limites Comme à la section 3.2.1, on doit dé�nir des conditions initiales et auxlimites pour caractériser un système particulier parmi ceux autorisés par l'équation de la chaleur. Cependant il nousfaut deux conditions aux limites car nous avons une dérivée partielle d'ordre 2 par rapport à x.On dé�nit donc :
� Conditions initiales : ρ(x, 0) = ρ0(x) ∀x ∈ [0, L]� Conditions aux limites :� ρ(0, t) = ρ0(t) ∀t ∈ [0, T ]� ρ(L, t) = ρL(t) ∀t ∈ [0, T ]
3.2.3 Convection-Di�usion
On en conviendra, cette dernière loi de comportement décrit les phénomènes de di�usion. Or, sur une autoroute,les véhicules sont contraints à se déplacer dans un unique sens (vers les x croissants pour notre modèle), et ne peuventreculer ou faire demi-tour. On en déduit que même si cette approche peut rendre compte d'une particularité dutra�c autoroutier (par exemple qu'un conducteur peut voir de loin l'état de la route et diminuer sa vitesse s'il voitun embouteillage au loin ...), il doit dans notre modèle avoir une place de second plan, c'est à dire que le coe�cientde di�usion sera en fait très faible. Le comportement principal est celui décrit par l'équation de transport (3.2.1 et3.15). On couplera alors les deux lois de comportement en sommant leur e�et sur le système :
� Équation de convection di�usion avec vitesse constante :∂ρ
∂t(x, t) = α
∂2ρ
∂x2(x, t)− c · ∂ρ
∂x(x, t) (3.17)
� Équation de convection di�usion avec vitesse variable :
∂ρ
∂t(x, t) = α
∂2ρ
∂x2(x, t)− ∂ρ
∂x(x, t) · cM
(1− 2ρ(x, t)
ρM
)(3.18)

Chapitre 4
Discrétisation des modèles mathématiques
et Construction des modèles informatiques
Nos modèles mathématiques sont posés, et avant de pouvoir les simuler via SciLab, nous devons :
1. Discrétiser nos modèles (nos équations) ;
2. Transcrire les modèles mathématiques discrétisés en langage SciLab.
4.1 Discrétisation
La méthode que nous allons utiliser se nomme � méthode des di�érences �nies �. On quadrille l'ensemble [0, L]×[0, T ] en petits rectangles de surface dx · dt. On utilisera donc dans notre programmes déjà deux paramètres : dx etdt, qui sont respectivement le pas du quadrillage en x et en t.On notera x = i · dx et t = j · dt. On notera aussi M = L/dx et N = T/dt, ou encore 0 ≤ i ≤M et 0 ≤ j ≤ NPrenons maintenant la fonction densité ρ. Pour la discrétiser, on l'identi�e à une fonction u. On a ρ(x, t) = ρ(i ·dx, j · dt) et on pose donc
u(i, j) = ρ(i · dx, j · dt) (4.1)
En appliquant la dé�nition de la dérivée partielle , on a
∂ρ
∂x(x, t) ≈ ρ(x+ dx, t)− ρ(x, t)
dxet
∂ρ
∂t(x, t) ≈ ρ(x, t+ dt)− ρ(x, t)
dt(4.2)
4.1.1 Modèle du transport convectif avec vitesse constante
En identi�ant avec l'équation de transport à vitesse constante (3.12), on obtient
ρ(x, t+ dt)− ρ(x, t)dt
= −c ρ(x+ dx, t)− ρ(x, t)dx
⇐⇒ ρ(x, t+ dt)− ρ(x, t) = −c dt
dx(ρ(x+ dx, t)− ρ(x, t))
En utilisant l'équivalence entre les fonctions u et ρ (équation 4.1), on en déduit
u(i, j + 1)− u(i, j) = −c dt
dx(u(i+ 1, j)− ρ(i, j)) (4.3)
Ici nous faisons le constat qu'en prenant dx et dt su�samment petit on a les équivalences suivantes :
u(i, j + 1)− u(i, j) ⇔ u(i, j)− u(i, j − 1)u(i+ 1, j)− ρ(i, j) ⇔ u(i, j − 1)− u(i− 1, j − 1)
12

CHAPITRE 4. DISCRÉTISATION ET MODÈLES INFORMATIQUES 13
Ce qui simpli�e l'expression et on en déduit l'approximation de la densité par discrétisation
u(i, j) = u(i, j − 1)− c dt
dx(u(i, j − 1)− u(i− 1, j − 1)) (4.4)
4.1.2 Modèle du transport convectif avec vitesse variable
Pour ce modèle, on prendra simplement le résultat de l'équation précédente (4.4), en remplaçant c par c(x, t) =cM
(1− ρ(x,t)
ρM
), comme dé�nit dans l'équation 3.13.
On aura donc, comme équation de transport discrétisé avec vitesse variable
u(i, j) = u(i, j − 1)− cM(
1− u(i, j − 1)ρM
)dt
dx(u(i, j − 1)− u(i− 1, j − 1)) (4.5)
4.1.3 Modèle de di�usion
Pour ce modèle, on procédera comme précédemment. On doit expliciter la dérivée partielle seconde de ρ parrapport à x de l'équation du transport à vitesse variable :
∂2ρ
∂x2(x, t) =
∂
∂x
(∂ρ
∂x(x, t)
)=
1dx
(∂ρ
∂x(x+ dx, t)− ∂ρ
∂x(x, t)
)=
1dx2
(ρ(x+ 2dx, t)− ρ(x+ dx, t)− ρ(x+ dx, t)− ρ(x, t))
∂2ρ
∂x2(x, t) =
1dx2
(ρ(x+ 2dx, t)− 2ρ(x+ dx, t)− ρ(x, t)) (4.6)
On couple les équations 3.16,4.2 et 4.6, et on trouve
ρ(x, t+ dt)− ρ(x, t)dt
= α · 1dx2
(ρ(x+ 2dx, t)− 2ρ(x+ dx, t)− ρ(x, t))
ρ(x, t+ dt)− ρ(x, t) =α · dtdx2
(ρ(x+ 2dx, t)− 2ρ(x+ dx, t)− ρ(x, t))
On exprime cette équation grâce à la fonction discrète u :
u(i, j + 1)− u(i, j) =α · dtdx2
(u(i+ 2, j)− 2u(i+ 1, j)− u(i, j))
u(i, j)− u(i, j − 1) =α · dtdx2
(u(i+ 1, j − 1)− 2u(i, j − 1)− u(i− 1, j − 1))
D'où l'expression de l'équation de di�usion discrétisée
u(i, j) = u(i, j − 1) +α · dtdx2
(u(i+ 1, j − 1)− 2u(i, j − 1)− u(i− 1, j − 1)) (4.7)
CHAPITRE 4. DISCRÉTISATION ET MODÈLES INFORMATIQUES 14
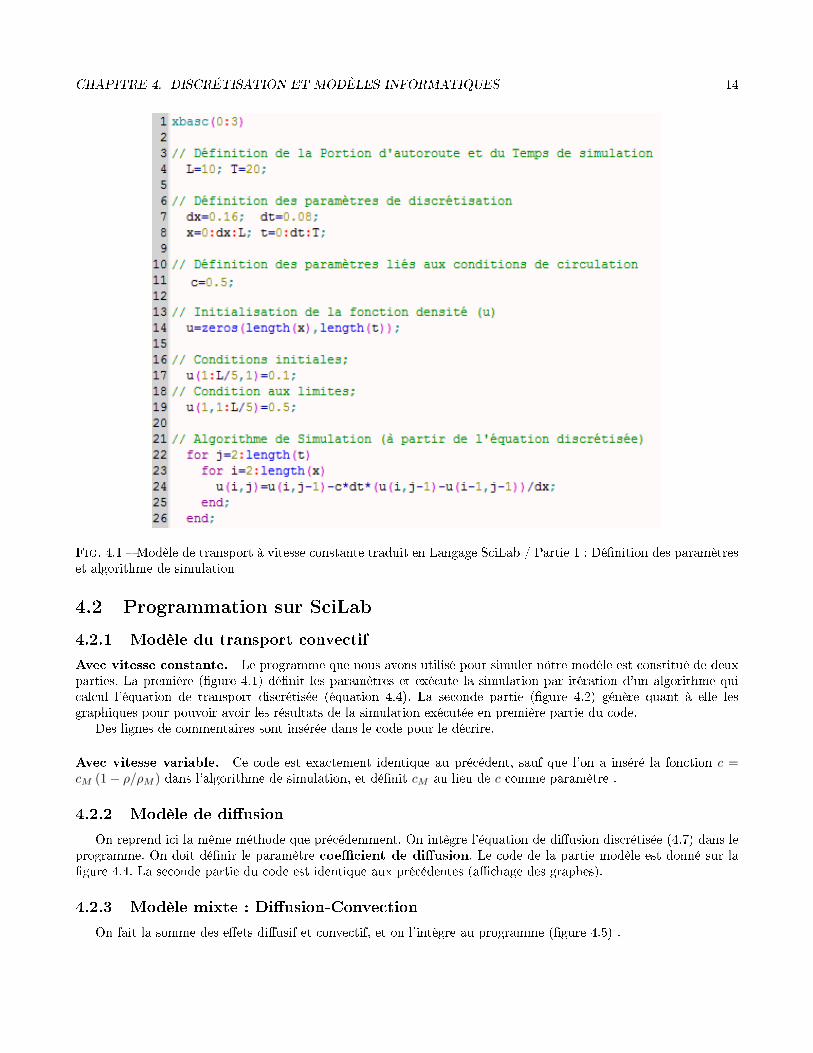
Fig. 4.1 � Modèle de transport à vitesse constante traduit en Langage SciLab / Partie 1 : Dé�nition des paramètreset algorithme de simulation
4.2 Programmation sur SciLab
4.2.1 Modèle du transport convectif
Avec vitesse constante. Le programme que nous avons utilisé pour simuler nôtre modèle est constitué de deuxparties. La première (�gure 4.1) dé�nit les paramètres et exécute la simulation par itération d'un algorithme quicalcul l'équation de transport discrétisée (équation 4.4). La seconde partie (�gure 4.2) génère quant à elle lesgraphiques pour pouvoir avoir les résultats de la simulation exécutée en première partie du code.
Des lignes de commentaires sont insérée dans le code pour le décrire.
Avec vitesse variable. Ce code est exactement identique au précédent, sauf que l'on a inséré la fonction c =cM (1− ρ/ρM ) dans l'algorithme de simulation, et dé�nit cM au lieu de c comme paramètre .
4.2.2 Modèle de di�usion
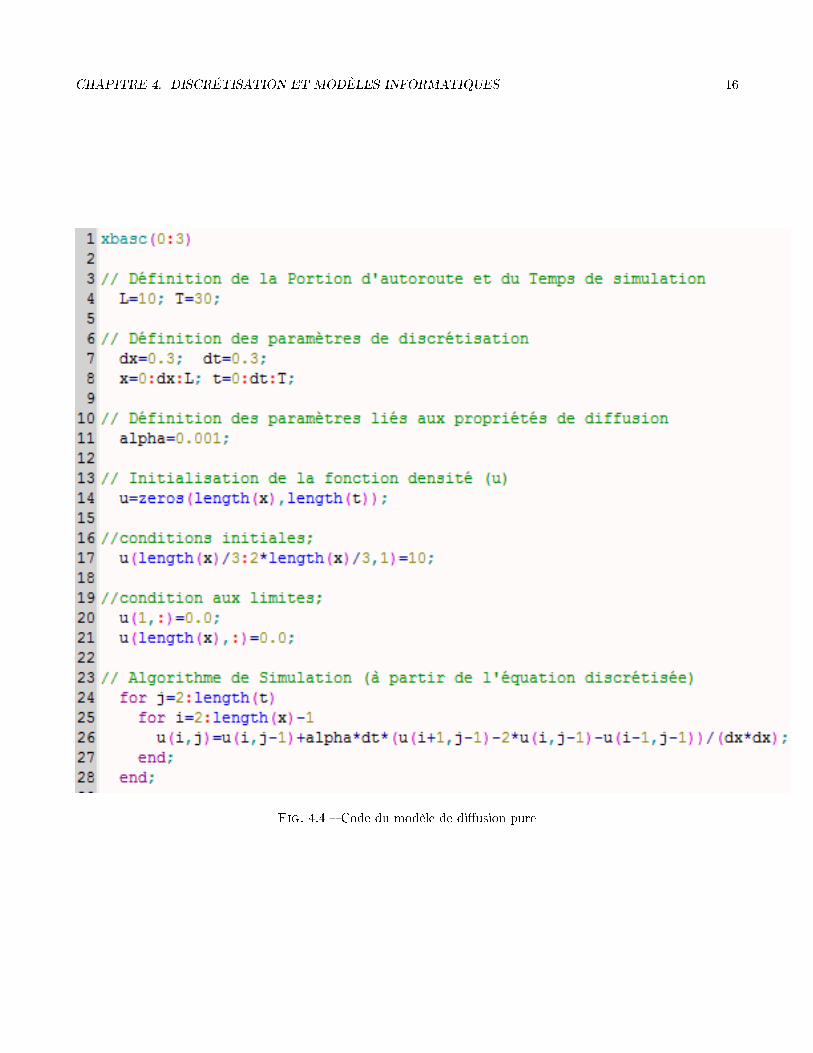
On reprend ici la même méthode que précédemment. On intègre l'équation de di�usion discrétisée (4.7) dans leprogramme. On doit dé�nir le paramètre coe�cient de di�usion. Le code de la partie modèle est donné sur la�gure 4.4. La seconde partie du code est identique aux précédentes (a�chage des graphes).
4.2.3 Modèle mixte : Di�usion-Convection
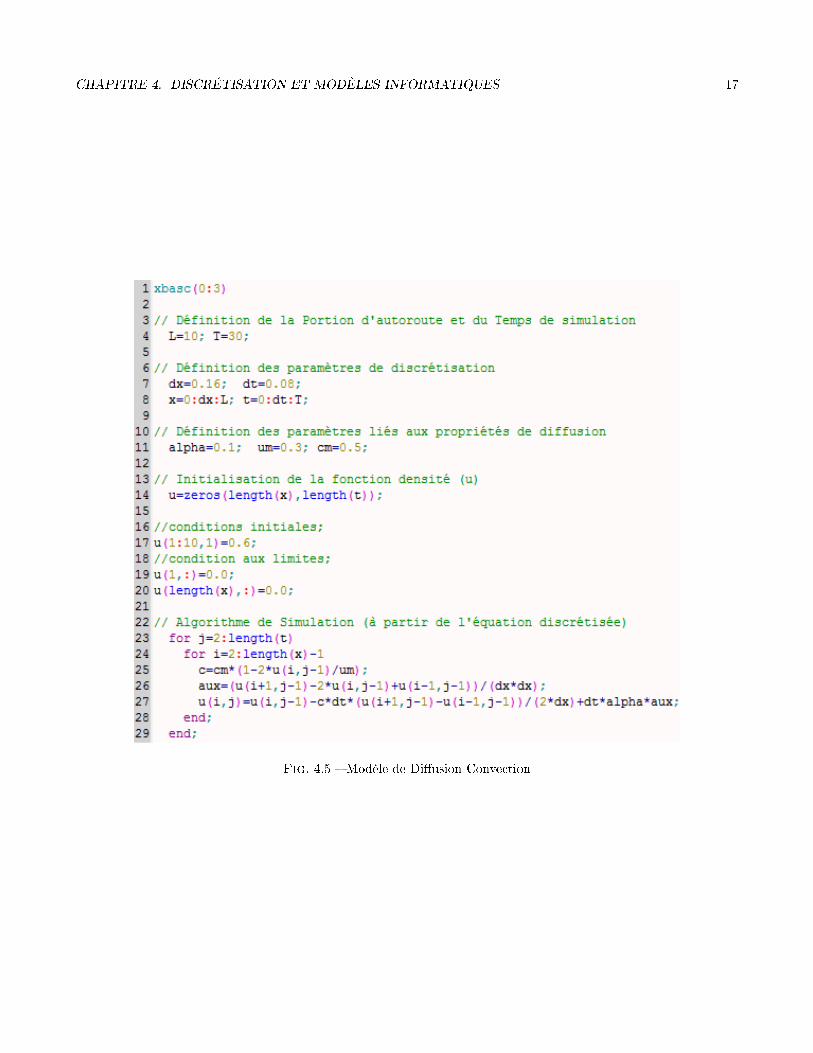
On fait la somme des e�ets di�usif et convectif, et on l'intègre au programme (�gure 4.5) .
CHAPITRE 4. DISCRÉTISATION ET MODÈLES INFORMATIQUES 15
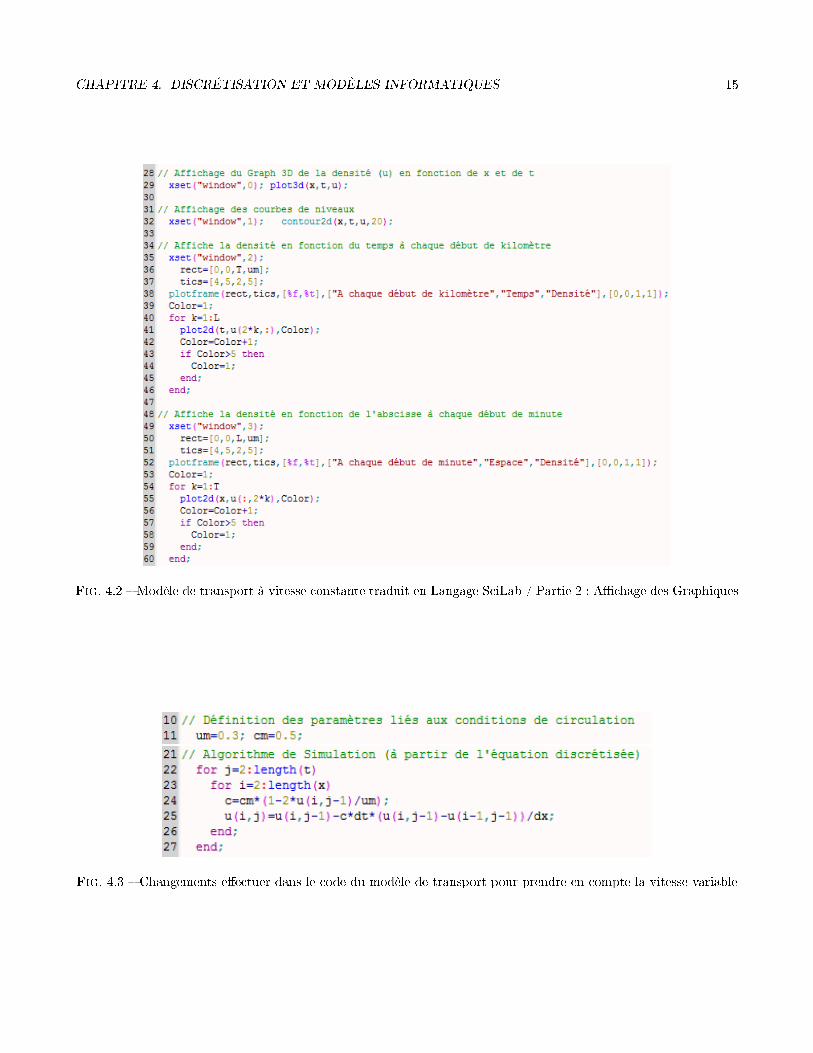
Fig. 4.2 � Modèle de transport à vitesse constante traduit en Langage SciLab / Partie 2 : A�chage des Graphiques
Fig. 4.3 � Changements e�ectuer dans le code du modèle de transport pour prendre en compte la vitesse variable
CHAPITRE 4. DISCRÉTISATION ET MODÈLES INFORMATIQUES 16
Fig. 4.4 � Code du modèle de di�usion pure
CHAPITRE 4. DISCRÉTISATION ET MODÈLES INFORMATIQUES 17
Fig. 4.5 � Modèle de Di�usion-Convection
Chapitre 5
Simulations via SciLab et analyse des
résultats
Maintenant que nous avons établi quelques modèles mathématiques, que nous les avons discrétisés puis en�ntranscris en langage SciLab, nous pouvons exécuter nos programmes et observer les résultats.Tous les paramètres utilisés dans les résultats de simulation de la section 5.1 sont respectivement les mêmes quedans le chapitre précédent, où nous avons donnés les codes de leur programme respectif.
5.1 Résultats de Simulation
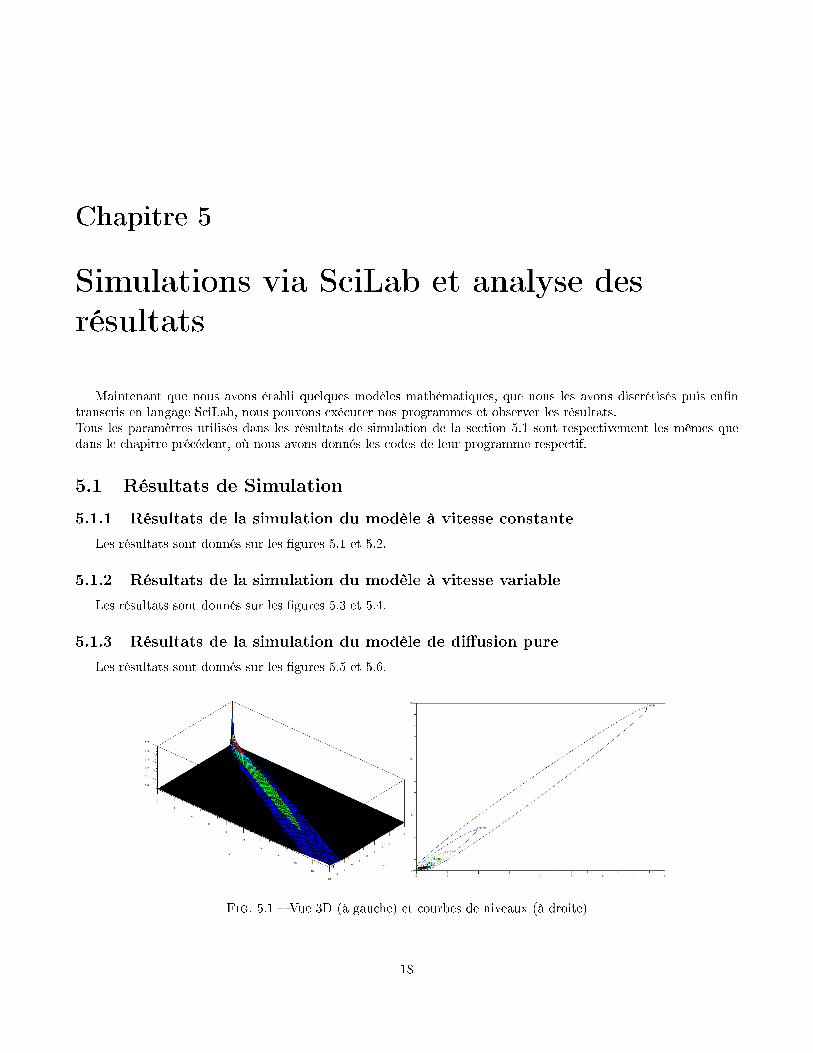
5.1.1 Résultats de la simulation du modèle à vitesse constante
Les résultats sont donnés sur les �gures 5.1 et 5.2.
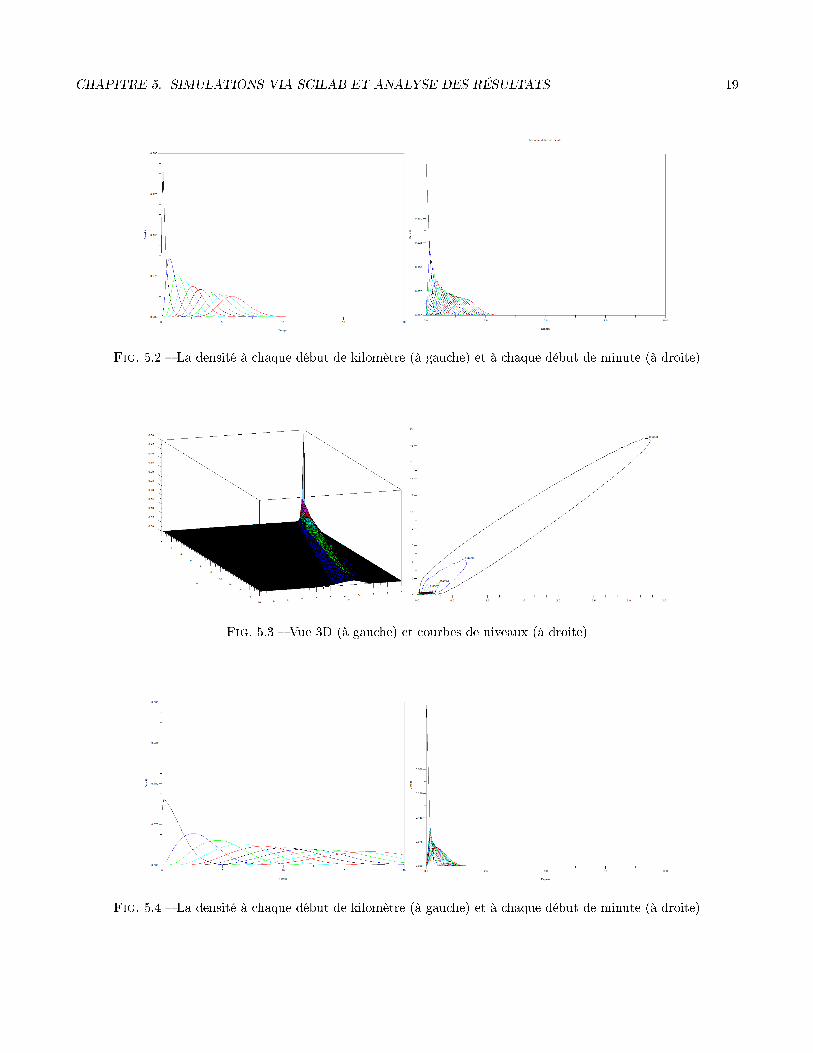
5.1.2 Résultats de la simulation du modèle à vitesse variable
Les résultats sont donnés sur les �gures 5.3 et 5.4.
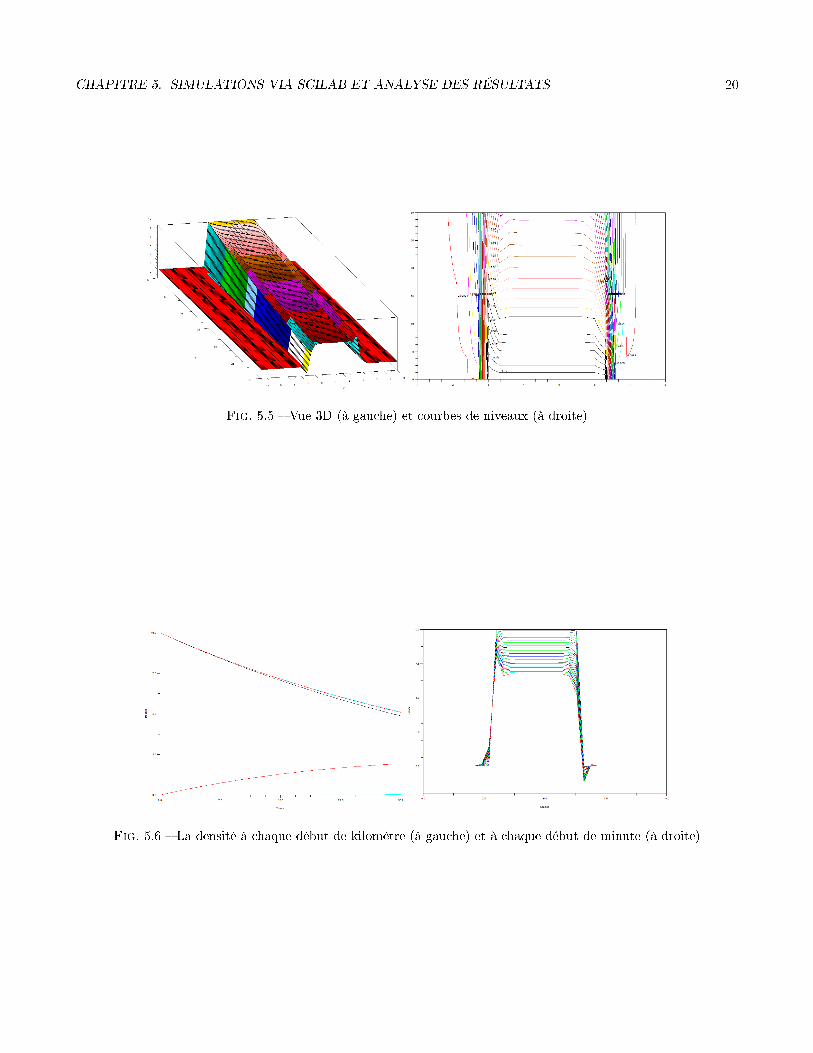
5.1.3 Résultats de la simulation du modèle de di�usion pure
Les résultats sont donnés sur les �gures 5.5 et 5.6.
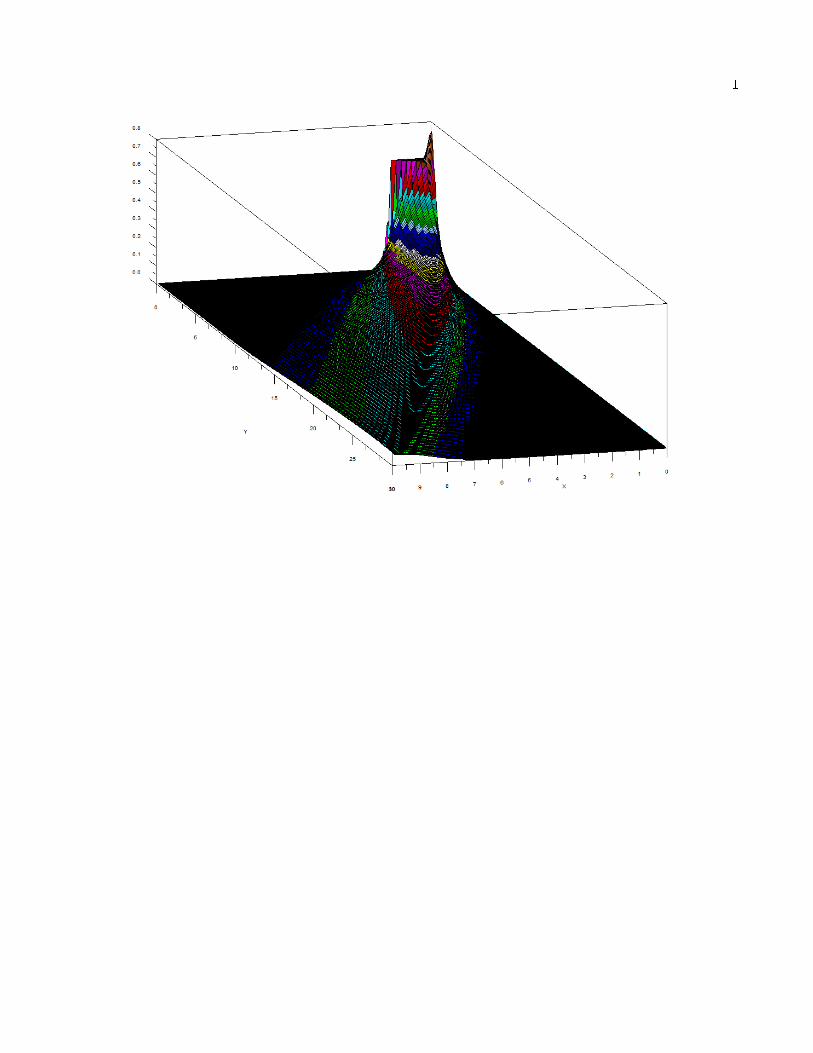
Fig. 5.1 � Vue 3D (à gauche) et courbes de niveaux (à droite)
18
CHAPITRE 5. SIMULATIONS VIA SCILAB ET ANALYSE DES RÉSULTATS 19
Fig. 5.2 � La densité à chaque début de kilomètre (à gauche) et à chaque début de minute (à droite)
Fig. 5.3 � Vue 3D (à gauche) et courbes de niveaux (à droite)
Fig. 5.4 � La densité à chaque début de kilomètre (à gauche) et à chaque début de minute (à droite)
CHAPITRE 5. SIMULATIONS VIA SCILAB ET ANALYSE DES RÉSULTATS 20
Fig. 5.5 � Vue 3D (à gauche) et courbes de niveaux (à droite)
Fig. 5.6 � La densité à chaque début de kilomètre (à gauche) et à chaque début de minute (à droite)
CHAPITRE 5. SIMULATIONS VIA SCILAB ET ANALYSE DES RÉSULTATS 21
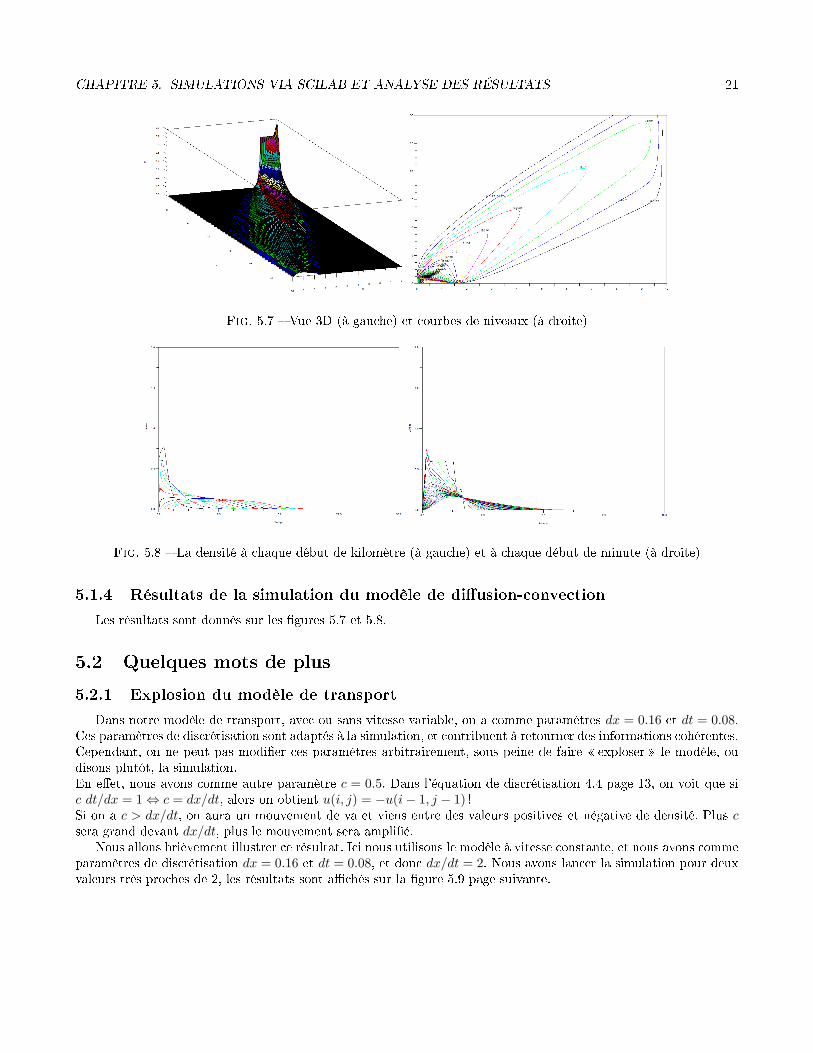
Fig. 5.7 � Vue 3D (à gauche) et courbes de niveaux (à droite)
Fig. 5.8 � La densité à chaque début de kilomètre (à gauche) et à chaque début de minute (à droite)
5.1.4 Résultats de la simulation du modèle de di�usion-convection
Les résultats sont donnés sur les �gures 5.7 et 5.8.
5.2 Quelques mots de plus
5.2.1 Explosion du modèle de transport
Dans notre modèle de transport, avec ou sans vitesse variable, on a comme paramètres dx = 0.16 et dt = 0.08.Ces paramètres de discrétisation sont adaptés à la simulation, et contribuent à retourner des informations cohérentes.Cependant, on ne peut pas modi�er ces paramètres arbitrairement, sous peine de faire � exploser � le modèle, oudisons plutôt, la simulation.En e�et, nous avons comme autre paramètre c = 0.5. Dans l'équation de discrétisation 4.4 page 13, on voit que sic dt/dx = 1⇔ c = dx/dt, alors on obtient u(i, j) = −u(i− 1, j − 1) !Si on a c > dx/dt, on aura un mouvement de va et viens entre des valeurs positives et négative de densité. Plus csera grand devant dx/dt, plus le mouvement sera ampli�é.
Nous allons brièvement illustrer ce résultat. Ici nous utilisons le modèle à vitesse constante, et nous avons commeparamètres de discrétisation dx = 0.16 et dt = 0.08, et donc dx/dt = 2. Nous avons lancer la simulation pour deuxvaleurs très proches de 2, les résultats sont a�chés sur la �gure 5.9 page suivante.
CHAPITRE 5. SIMULATIONS VIA SCILAB ET ANALYSE DES RÉSULTATS 22
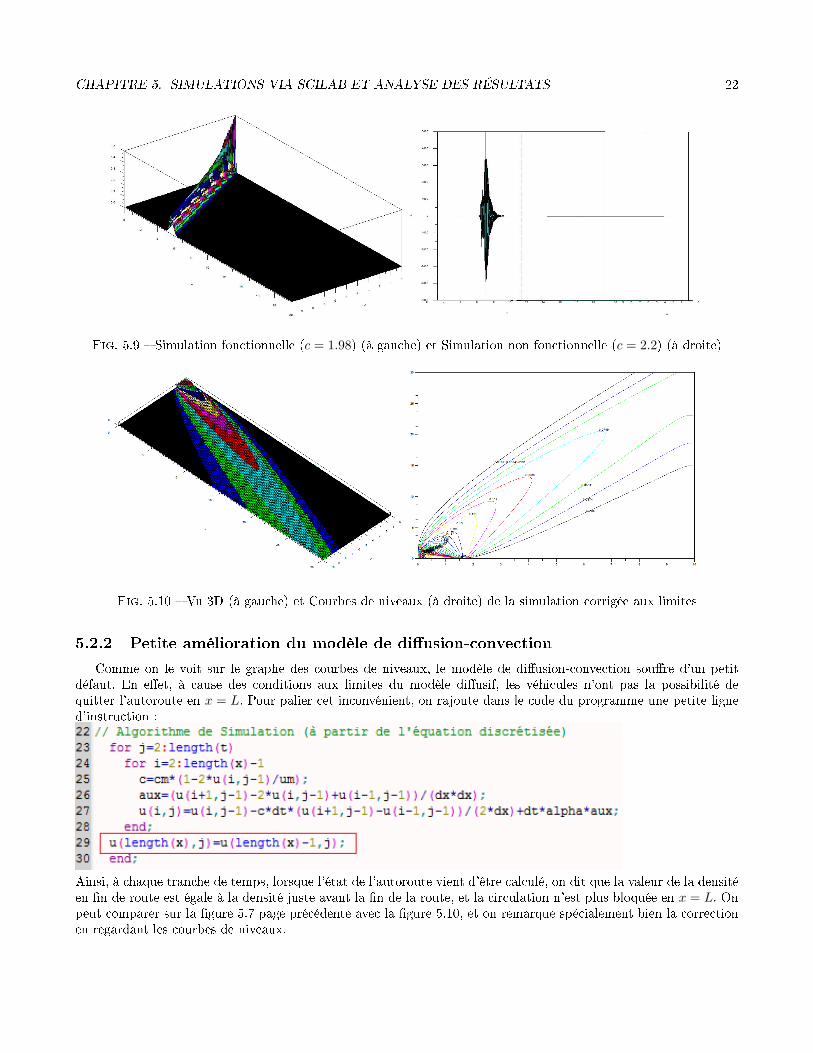
Fig. 5.9 � Simulation fonctionnelle (c = 1.98) (à gauche) et Simulation non fonctionnelle (c = 2.2) (à droite)
Fig. 5.10 � Vu 3D (à gauche) et Courbes de niveaux (à droite) de la simulation corrigée aux limites
5.2.2 Petite amélioration du modèle de di�usion-convection
Comme on le voit sur le graphe des courbes de niveaux, le modèle de di�usion-convection sou�re d'un petitdéfaut. En e�et, à cause des conditions aux limites du modèle di�usif, les véhicules n'ont pas la possibilité dequitter l'autoroute en x = L. Pour palier cet inconvénient, on rajoute dans le code du programme une petite ligned'instruction :
Ainsi, à chaque tranche de temps, lorsque l'état de l'autoroute vient d'être calculé, on dit que la valeur de la densitéen �n de route est égale à la densité juste avant la �n de la route, et la circulation n'est plus bloquée en x = L. Onpeut comparer sur la �gure 5.7 page précédente avec la �gure 5.10, et on remarque spécialement bien la correctionen regardant les courbes de niveaux.
Chapitre 6
Conclusion
Pour conclure sur le sujet du tra�c autoroutier, on peut dire que ce dernier modèle, à savoir le modèle di�usion-convection, est un modèle simple qui rend bien compte de ce à quoi nous pouvions nous attendre. C'est en tout casle meilleur modèle que nous avons envisagé pour décrire ce phénomène de circulation.
En fait, comme on vient de le voir au chapitre précédent, il a fallut l'ajuster un petit peu pour qu'il soit plusréaliste. En e�et, en partant d'un modèle de transport convectif, puis en ajoutant un e�et de di�usion par la suitepour le rendre plus souple, nous n'avions pas envisagé le petit défaut que nous avons du corriger � à la main �.
Bien qu'une simulation puisse nous permettre de � visualiser � les solutions d'un modèle dynamique de façon trèsprécise, il n'en reste pas moins que la simulation n'est que le re�et du modèle mathématique sous-jasent. En fait, ondevrait même dire qu'elle est au mieux son re�et.Car, si on ajuste mal certains de ces paramètres (de discrétisationpar exemple), la simulation peut tout à fait � exploser �, comme nous l'avons montré en �n du chapitre précédent.
Il faut donc à mon avis utiliser la simulation avec une grande prudence, car, �nalement, il peut y avoir desimprévus, et parfois même, une erreur ou un bug peut en cacher un autre !
Cet exemple nous montre aussi un coté important de l'intérêt de concevoir des simulations. La simulation, si latraduction informatique est faite correctement, nous permet d'une part de tester le modèle, de savoir s'il correspondà la réalité, aux données expérimentales, mais la simulation peut être un très bon outils pour tester si certaineshypothèses mathématiques, conduisent ou non aux résultats au moins qualitatifs que nous imaginions en faisantcette hypothèse.
Je pense réutiliser SciLab de temps en temps pour tester quelques petites simulations du même type que cellesréalisées dans les quatre thèmes du module SCI 123 : Simuler des systèmes masse-ressort, des propagations d'ondesacoustiques ou électromagnétiques, et que sais-je encore ? Créer ses propres modèles, les simuler, tester et visualiserles équations pour accompagner le cours pourrait aussi être une activité intéressante et un bon entraînement...
23
Bibliographie
[1] Télécharger SciLab : http ://www.scilab.org/download/
[2] Documentation Multilingue SciLab : http ://www.scilab.org/product/
[3] Première loi de Fick : H.Breuer, Atlas de la Physique, Encyclopédies d'Aujourd'hui, Livre de Poche, page 125.
24