Embed Size (px)
Citation preview
Introduction : La cinématique est l’étude des corps en mouvement. Pour étudier des corps en mouvement, il nous faut tout d’abord définir « un point de vue », c'est-à-dire une référence. Cette référence, sera un corps considéré comme fixe ; nous le modéliserons par un repère orthonormé. Mais cette référence géographique n’est pas suffisante ; il nous faudra aussi définir une référence temporelle.
Mouvement : Les mouvements sont divisés en trois catégories :
- Les mouvements de translation : On distingue deux types de translations :
# Les translations rectilignes # Les translations circulaires
Définition : Tous les points d'un solide se déplaçant en mouvement de translation ont - Des trajectoires identiques et parallèles - La même vitesse. - La même accélération
- Les mouvements circulaires :
Définition : Tous les points d'un solide se déplaçant en mouvement circulaire ont - Des trajectoires circulaires et concentriques - Des vitesses proportionnelles par rapport au centre de rotation
- Les autres, les mouvements plans
L’image d’un mouvement d’un corps se déplaçant d’un point A à un point B est la trajectoire du point
- La trajectoire d’un point d’un corps en mouvement de translation est un segment de droite.
- La trajectoire d’un point d’un corps en mouvement circulaire est un arc de cercle.
Vitesse : Pour aller d’un point A à un point B, un corps va parcourir un distance pendant une certaine durée. On peut à partir de cette observation écrire l’équation de la vitesse moyenne :
Vmoy =
La distance étant définie en mètre et la durée en seconde, la vitesse aura comme unité le m/s Cependant, lors d’un déplacement, la vitesse n’est pas forcément uniforme (constante). On aura des phases d’accélération et des phases de décélération. On distinguera donc des mouvements :
- Uniformes - Variés (accélération ou décélération)
SCIENCES DE L’INGENIEUR Fiche cours
FC.02 Modéliser et représenter le réel Mouvement - Vitesse - Accélération
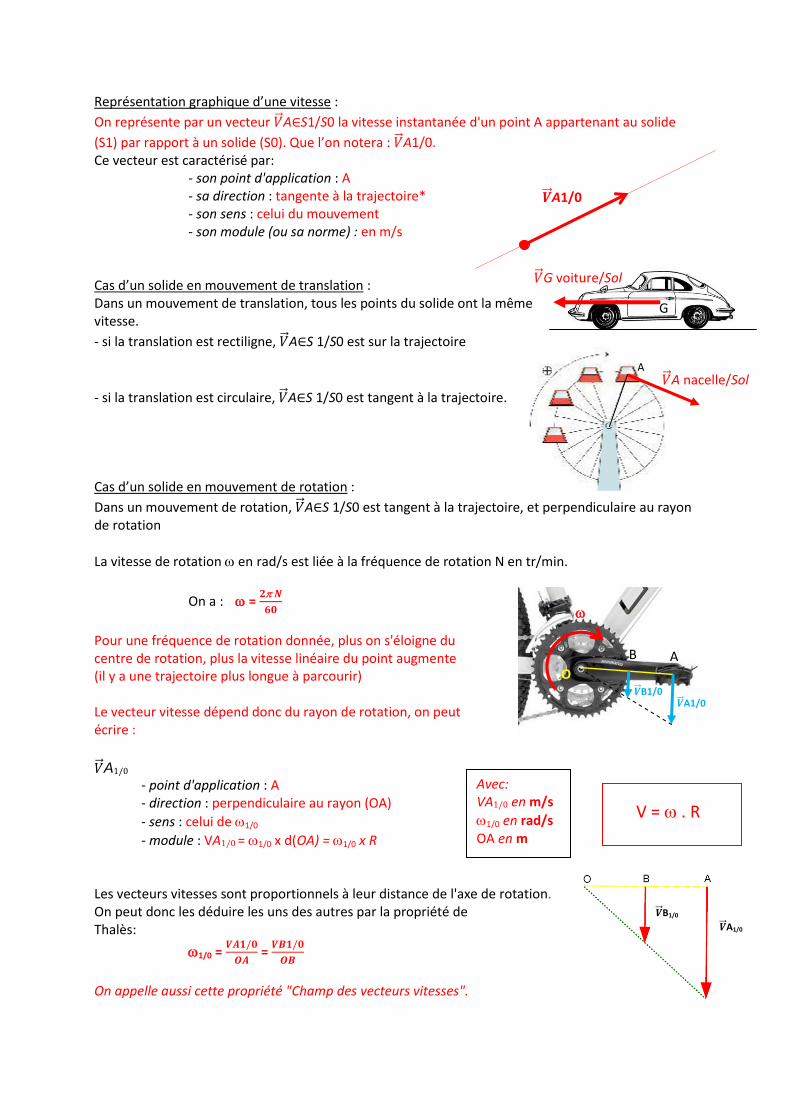
Représentation graphique d’une vitesse :
On représente par un vecteur A∈S1/S0 la vitesse instantanée d'un point A appartenant au solide
(S1) par rapport à un solide (S0). Que l’on notera : A1/0. Ce vecteur est caractérisé par:
- son point d'application : A - sa direction : tangente à la trajectoire* - son sens : celui du mouvement - son module (ou sa norme) : en m/s
Cas d’un solide en mouvement de translation : Dans un mouvement de translation, tous les points du solide ont la même vitesse.
- si la translation est rectiligne, A∈S 1/S0 est sur la trajectoire
- si la translation est circulaire, A∈S 1/S0 est tangent à la trajectoire. Cas d’un solide en mouvement de rotation :
Dans un mouvement de rotation, A∈S 1/S0 est tangent à la trajectoire, et perpendiculaire au rayon de rotation
La vitesse de rotation en rad/s est liée à la fréquence de rotation N en tr/min.
On a : =
Pour une fréquence de rotation donnée, plus on s'éloigne du centre de rotation, plus la vitesse linéaire du point augmente (il y a une trajectoire plus longue à parcourir) Le vecteur vitesse dépend donc du rayon de rotation, on peut écrire :
A1/0 - point d'application : A - direction : perpendiculaire au rayon (OA)
- sens : celui de 1/0
- module : VA1/0 = 1/0 x d(OA) = 1/0 x R Les vecteurs vitesses sont proportionnels à leur distance de l'axe de rotation. On peut donc les déduire les uns des autres par la propriété de Thalès:
1/0 =
=
On appelle aussi cette propriété "Champ des vecteurs vitesses".
A1/0
G
G voiture/Sol
A nacelle/Sol
B1/0
B
O A
A1/0
Avec: VA1/0 en m/s
1/0 en rad/s OA en m
B1/0
A1/0
V = . R
A
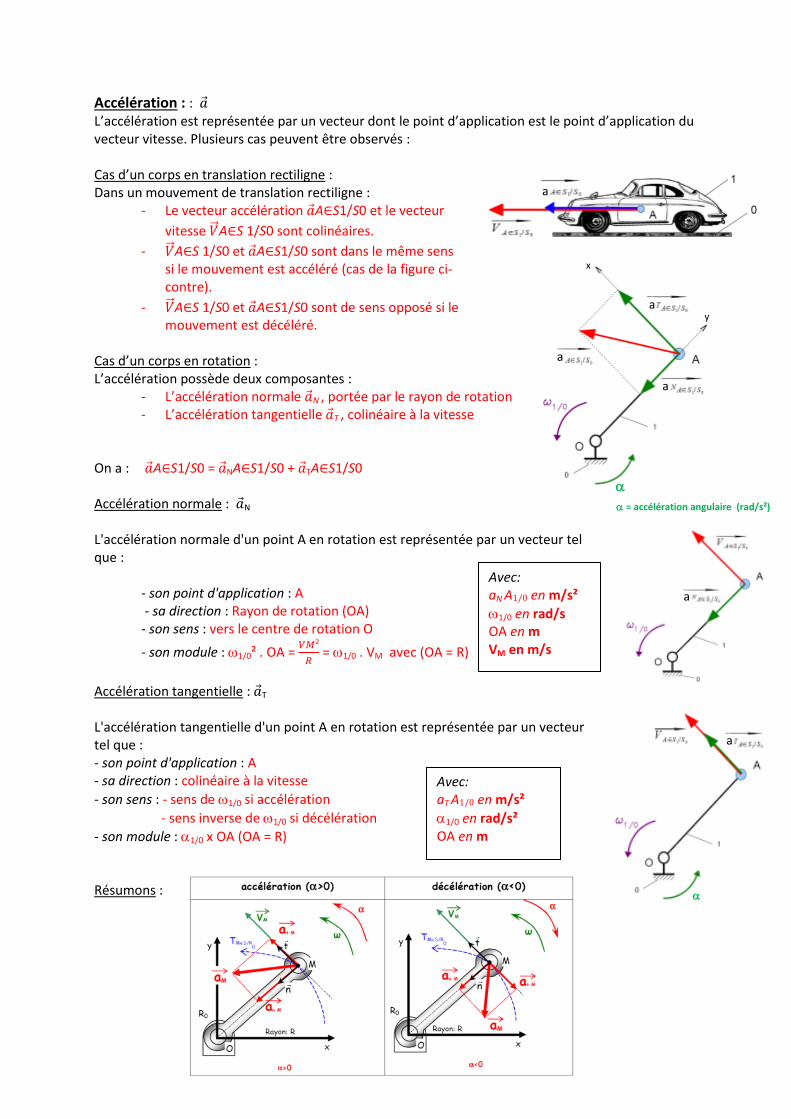
Accélération : : L’accélération est représentée par un vecteur dont le point d’application est le point d’application du vecteur vitesse. Plusieurs cas peuvent être observés : Cas d’un corps en translation rectiligne : Dans un mouvement de translation rectiligne :
- Le vecteur accélération A∈S1/S0 et le vecteur
vitesse A∈S 1/S0 sont colinéaires.
- A∈S 1/S0 et A∈S1/S0 sont dans le même sens si le mouvement est accéléré (cas de la figure ci-contre).
- A∈S 1/S0 et A∈S1/S0 sont de sens opposé si le mouvement est décéléré.
Cas d’un corps en rotation : L’accélération possède deux composantes :
- L’accélération normale N , portée par le rayon de rotation - L’accélération tangentielle T , colinéaire à la vitesse
On a : A∈S1/S0 = NA∈S1/S0 + TA∈S1/S0 Accélération normale : N L'accélération normale d'un point A en rotation est représentée par un vecteur tel que :
- son point d'application : A - sa direction : Rayon de rotation (OA) - son sens : vers le centre de rotation O
- son module : 1/0² . OA =
= 1/0 . VM avec (OA = R)
Accélération tangentielle : T L'accélération tangentielle d'un point A en rotation est représentée par un vecteur tel que : - son point d'application : A - sa direction : colinéaire à la vitesse
- son sens : - sens de 1/0 si accélération
- sens inverse de 1/0 si décélération
- son module : 1/0 x OA (OA = R) Résumons :
Avec: aN A1/0 en m/s²
1/0 en rad/s OA en m VM en m/s
Avec: aT A1/0 en m/s²
1/0 en rad/s² OA en m
a
= accélération angulaire (rad/s²)
a
a
a
a
a
x
y