Embed Size (px)
Citation preview

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 1
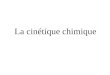
CINEMATIQUE (Révision) EXERCICE : Le système à étudier représente un système de préhension qui permet de saisir un objet et de le déplacer (voir figure 1 page 2). Le système est constitué :
D’un bâti fixe (0), repère lié 0 0 0 0R (O,x , y ,z )
.
D’une colonne (1), repère lié 1 1 1 0R (O,x , y ,z )
, en liaison pivot d’axe 0(O, z )
avec le bâti (0). On note : 0 1 0 1( x ,x ) ( y , y )
D’un bras (2), repère lié 2 1 2 2R (A,x , y ,z )
, en liaison pivot parfaite d’axe 1(A,x )
avec la colonne
(1). On note 1 2 0 2( y , y ) (z ,z )
et 1 0OA a y h z
( a et h constantes) . (2) est aussi en liaison pivot parfaite d’axe 1(B,x )
avec le bras (3).
D’un bras (3), repère lié 3 1 3 3R (B, x , y ,z )
, de centre d’inertie G3 tel que 3 3BG b z
( b constante) .
D’une barre (4) repère lié 4 1 4 4R (D,x , y ,z )
.
La barre (4) est liée à la colonne (1) par une liaison pivot d’axe 1(D,x )
et au bras (3) par une liaison pivot d’axe 1(C,x )
.
D’un vérin qui assure la rotation de (2) par rapport à (1), ce vérin est constitué de la tige (5) et du
corps (6) avec L(5/6) = liaison pivot glissant d’axe 6(E, y )
. On a aussi L(6/1) = liaison pivot 1(E,x )
et L(5/2) = pivot d’axe 1(F,x )
.
On note 6 1 6 6R (E,x , y ,z )
le repère lié au corps (6), 1 6 0 6( y , y ) (z ,z )
,
22AF y
2
l , 0AE ez
(e et l2 constantes).
A noter qu’on a AB = DC = l2 et AD = BC = l1 (l1 et l2 constantes). Questions :
1) Donner le torseur cinématique (2 /1)v au point A, En déduire (2 /1)v au point F.
2) Déterminer le torseur cinématique (1 / 0)v au point F, En déduire (2 / 0)v au point F.
3) En notant 6EF (t) y
, exprimer dans la base 1 6 6(x , y ,z )
les vecteurs vitesses V(F 5 / 6)
et
V(F 6 /1)
.
4) En exprimant la fermeture cinématique au point F ( V(F 2 / 2) 0
) écrire les deux équations
différentielles liant , , , , , et l2. 5) Quelle est la nature du mouvement de (3) par rapport à (1) ? Justifier. 6) En déduire le vecteur rotation (3 /1)
.
7) Quelles sont les trajectoires : * du point B du solide (3) dans (1) ; * du point G3 du solide (3) dans (1).
8) Déterminer les torseurs cinématiques : (3 /1)v au point B , (3 /1)v au point G3, (3 / 2)v au point A, (2 / 5)v au point F.
9) Déterminer le vecteur vitesse 3V(G 3 / 0)
.

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 2
1y
Figure 1
O
A
B
C
D
(0)
(1)
(2)
(3)
(4) 0z
1y
1y
2y
4y
3y
3z
2z
1x
0z
G3
E
1x
0x
1y
0y
0z
F
(5)
(6)
6y
6z

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 3
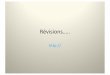
STATIQUE (Révision) EXERCICE : La figure 2 ci-dessous représente la modélisation cinématique d’une ponceuse vibrante électroportative. L’arbre d’entrée (2) est entraîné en rotation continue par un moteur (non représenté) ; cette rotation continue est ensuite transformée par l’intermédiaire de la noix (3) en un mouvement de rotation alternative du patin (4). On note : : 1NB = μ z
; 1AC= λ x
; 2 2AB = r z
; 1 4NC= d x
; 1 1CI = -h z
;
2 1 2 1 2(y , y ) (z ,z )
; 4 1 4 1 4(x ,x ) (y , y )
;
L’action mécanique du moteur sur l’arbre (2) est modélisée par un torseur couple de moment 1x
m mC C .
L’action mécanique de la pièce à poncer sur le patin (4) est modélisée par :
(ponçage4=1 1 1
1 1 1
x y z
x y z
x y z
x y z C
F F F
M M M
On suppose que le mécanisme est en équilibre, toutes les liaisons sont parfaites et Le poids des pièces est négligeable.
Les torseurs d’actions mécaniques des liaisons en un point M seront notés : (ij) =
1 1 1( x , y , z )
ij ij
ij ij
ij ijM
X L
Y M
Z N
.
1. Tracer le graphe d’analyse des actions mécaniques. 2. Déterminer, en projection sur 1 1x , y
et 1z
, les trois équations scalaires issues de la fermeture géométrique..
3. Ecrire , dans la base 1 1 1(x , y ,z )
, la forme des torseurs d’action mécaniques de liaisons suivants :
(43) au point B ; (23) au point B ; (12) au point A ; (14) au point C . 4. Déterminer l’équation scalaire issue du théorème du moment statique au point A appliqué à (2) en projection sur 1x
.
5. Déterminer les trois équations scalaires issues du théorème de la résultante statique appliquée à (3) en projection sur 1 1 1(x , y ,z )
.
6. Isoler (4), puis en vous aidant des résultats des questions précédentes, déterminer l’unique équation scalaire issue du PFS pour déterminer Mz en fonction de Cm, d1, r2 , 2 et 4.
7. Montrer alors que : Mz = -Cm 1 4
2 2
cos
cos
d
r
.
Figure 2
A
B
C
I
N
1x
4x
1x
4x
1y
1z
1z
2z
2
4
4
.
.
1x
1y
1z
2z
2
2 2y
1z
1x
4x
1y
4y
4
4
(1)
(2)
(4)
(3)

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 4
CINETIQUE (Cours) I- CENTRE D’INERTIE : (voir cours de statique ) Le centre d’inertie d’un ensemble matériel (E) de masse m est le point G tel que :
P E
mOG = OP dm
Le centre d’inertie G de (E) vérifie aussi : P E
GP dm = 0
;
Si (E) est une partition de n sous ensembles matériels :
E = i ni 1 iE tel que chaque Ei est de masse mi et de centre d’inertie Gi
Alors : 1 2 3
n
i 1P E P E E E ... P Ei
mOG OP dm OP dm OP dm
Donc n
iii=
n
i11 i=
m avec m =O = mG m OG
( m : masse de l’ensemble matériel (E) ) ;
Si (E) admet un élément de symétrie matérielle (plan , axe , centre ) alors son centre d’inertie G appartient
à cet élément de symétrie.
II- OPERATEUR D’INERTIE – MATRICE D’INERTIE : 2.1. Moment d’inertie d’un solide par rapport à un axe : . Soit (S) un solide ; . Soit )z , y , x , R(O
un repère ;
. Soit )u,O(
un axe d’origine O (origine du repère R) et
de vecteur unitaire u
. . Soit P un point courant de (S) de masse élémentaire dm. Par définition le moment d’inertie du solide (S) par rapport à l’axe () est le scalaire positif :
2
(O,u)
P S
I I HP dm
On a : sinOPHP or u
est un vecteur unitaire donc 1u
Alors sinOPuHP
= OPu
et 2 2
A
HP u OP u OP u OP
OPuOP.uAOP.uHP2
Donc dmOPuOP.uISP
Comme u
est indépendant de m alors dmOPuOP.uISP
D’où O(O,u)ΔI = I = u.J (S,u)
(à retenir)
x
y
z
O
P
dm G
(E)
. .
x
y
z
O
P
dm
()
u
H (S)
.
.

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 5
2.2. Opérateur d’inertie d’un solide : L’opérateur d’inertie d’un solide (S) en un point O est l’opérateur linéaire qui à tout vecteur u
fait
correspondre le vecteur : O
P S
J (S,u) = OP u OP dm
dmOPuOP)u,S(JuSP
OJO
2.3. Matrice d’inertie d’un solide :
L’opérateur d’inertie est linéaire donc on peut lui associer une matrice : O OJ (S ,u)= I (S) u
(à retenir)
Cherchons la matrice d’inertie OI (S) .
On a : O
(x , y , z)
I (S)
. . .
. . .
. . .
Soit P un point courant de (S) de masse élémentaire dm , soit z z yy x x OP
.
On a O
P S
J (S, x) OP x OP dm
(x , y,z) (x , y,z)
1 x 0
x OP 0 y z
0 z y
donc
2 2
(x , y,z) (x , y,z)
x 0 y z
OP x OP y z xy
z y xz
Donc 2 2O
P S P S P S P S
J (S,x) OP x OP dm (y z )dm x xydm y xzdm z
De même : 2 2O
P S P S P S P S
J (S, y) OP y OP dm xydm x (x z )dm y yzdm z
2 2O
P S P S P S P S
J (S,z) OP z OP dm xzdm x yzdm y (x y )dm z
D’ou
2 2
P S P S P S
2 2O
P S P S P S
2 2
P S P S P S(x , y , z)
y + z dm - xy dm - xzdm
I (S) = - xy dm x + z dm - yzdm
- xzdm - yzdm x + y dm
[IO(S)] est la matrice d’inertie du solide (S) au point O, exprimée dans la base (x ,y ,z)
,
[IO(S)] est associée à l’opérateur d’inertie )u,S(JO
: O OJ (S ,u)= I (S) u
On note :
)x,S(JO
)y,S(JO
)z,S(JO
O
(x , y , z)
A F E
I (S) F B D
E D C
OJ (S,x)
OJ (S, y)
OJ (S,z)
x
y
z
O
P
dm
(S)
.

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 6
*
SP
22Ox dmzyIA : moment d’inertie de (S) par rapport à l’axe )x,O(
( )x,S(J.xA O
) ;
*
SP
22Oy dmzxIB : moment d’inertie de (S) par rapport à l’axe )y,O(
;
*
SP
22Oz dmyxIC : moment d’inertie de (S) par rapport à l’axe )z,O(
;
*
SP
Oxy dmxyIF : produit d’inertie de (S) par rapport aux axes )x,O(
et )y,O(
( O OF x.J (S, y) y.J (S,x)
)
*
SP
Oxz dmxzIE : produit d’inertie de (S) par rapport aux axes )x,O(
et )z,O(
;
*
SP
Oyz dmyzID : produit d’inertie de (S) par rapport aux axes )y,O(
et )z,O(
.
2.4. Application : (S) : tige rectiligne ,homogène , de masse m , de longueur l , de diamètre négligeable et de centre d’inertie G ; R(G , x , y , z)
repère lié à (S).
1) Déterminer en fonction de m et l la matrice d’inertie de (S) au point G dans la base )z,y,x(
.
2) Déterminer le moment d’inertie de la tige (S) par rapport à l’axe )u,G(
tel que le vecteur unitaire u
est situé dans le
plan (G , y , z)
et (y , u)
2.5. Base principale d’inertie : La matrice d’inertie [IO(S)] est à coefficients réels et elle est symétrique, donc elle est diagonalisable. Il existe donc une base de vecteurs propres )z , y , x( 111
dans laquelle on a :
1 1 1
1
O 1
1 (x , y , z )
A 0 0
I (S) 0 B 0
0 0 C
* )x , (O 1
, )y,O( 1
et )z , (O 1
sont les axes principaux d’inertie de (S) au point O
0 1 1 1J (S,x ) A x
;
* A1 , B1 et C1 sont les moments d’inertie principaux de (S) au point O . 2.6. Symétrie matérielle d’un solide : On a la symétrie matérielle si on a à la fois la symétrie géométrique et la symétrie de répartition de masse.
a) Solide (S) ayant (O,x ,y )
comme plan de symétrie matérielle :
A tout point P(x , y , z) de masse dm correspond son symétrique P’(x , y , –z) de masse dm également .
On a :
SP
Oyz dmyzID
Soit S = S1 S2 avec S1 la partie de S située au dessus du plan )y,x,O(
et S2 la partie située au dessous .
Alors
21 SSPSP
Oyz dmyzdmyzID
21 SPSP
dmyzdmyz
G
(S)
-l/2
l/2
()
α
z
y
x
u
O x
y
z
-z
P
P’
(S)
(S1)
(S2)
z
y
x

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 7
1 1P S P S
yz dm y( z)dm 0
Donc D=0 et de même on montre que 0dmxzIESP
Oxz
;
D’où : 0
(x , y , z)
A F 0
I (S) F B 0
0 0 C
; (O,z)
est un axe principal d’inertie de (S) .
b) Solide (S) ayant (O,x ,z )
et (O,y ,z )
comme plans de symétrie matérielle :
. (O, x ,z )
plan de symétrie matérielle donc P S P S
xydm yzdm 0
(F=D=0)
. )z,y,O(
plan de symétrie matérielle donc :
0dmxzdmxySPSP
(F=E=0)
D’où 0
(x , y , z)
A 0 0
I (S) 0 B 0
0 0 C
;
(x ,y ,z)
est une base principale d’inertie de (S)
Remarque : il suffit que le repère )z , y , x , R(O
présente deux plans de symétrie matérielle pour (S)
pour que sa matrice d’inertie au point O soit diagonale dans la base )z,y,x(
. c) Solide (S) ayant (O ,z )
comme axe de symétrie matérielle de révolution :
Tout plan contenant l’axe )z,O(
est un plan de symétrie matérielle de (S) donc :
2.7. Théorème de Huygens généralisé : . Soit (S) un solide de masse m et de centre d’inertie G. . Soit A un point. . Le théorème de Huygens permet de mettre en relation les matrices d’inertie de (S) aux points A et G : [IA(S)] et [IG(S)] exprimées dans la même base )z,y,x(
.
Soit u
un vecteur unitaire quelconque.
On a : A
P SAG GP
J (S,u) AP (u AP)dm
SP SP
A dm)APu(GPdm)APu(AG)u,S(J
SPSP
dm)APu(GP)dmAPu(AG
Or AGmdmAPSP
(G est le centre d’inertie de (S))
dans toute base orthonormée dont le 3eme vecteur unitaire est z
)z,y,x(
ou (u , v,z)
0
( , , z)
A 0 0
I (S) 0 A 0
0 0 C
A
G
(S)
x
x
y
y
z
z
x
O (S)
y
z
y
O
(S)
x
z
u
v
x
y
u
v
z

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 8
Donc A
P SAG GP
J (S,u) mAG (u AG) GP (u AP ) dm
SPSP
A dm)GPu(GPdm)AGu(GP)AGu(AGm)u,S(J
SP
)AGu()dmGP(
)u,S(JG
Or 0dmGPSP
(G est le centre d’inertie de (S))
Donc Soit sous forme matricielle : A G AI (S) u I (S) u I (m,G) u
et comme u
est quelconque alors :
Soit
(x ,y , z)
a
AG = b
c
alors :
2 2G G G
2 2G G G
2 2G G G(x,y ,z) (x,y ,z) (x,y ,z)
A -F -E A -F -E m(b + c ) -mab -mac
-F B -D = -F B -D + -mab m(a + c ) -mbc
-E -D C -E -D C -mac -mbc m(a + b )
Remarques : 1. On a C = CG + m(a2 + b2) IAz = IGz + m(a2 + b2) a2 + b2 représente le carré de la distance entre les axes )z,A(
et )z,G(
2. Soit G un axe passant par le centre d’inertie G de (S) et A un axe passant par le point A tel que A// G alors on a de même : Avec d = distance (A , G) m : masse du solide (S) .
AI (m,G) représente la matrice d’inertie de (S) au
point A en supposant sa masse concentrée en G
GI (S) AI (S)
A = AG + m(b2 + c2) D = DG + mbc B = BG + m(a2 + c2) E = EG + mac C = CG + m(a2 + b2) F = FG + mab
A
G
a
b
c
x
y
z
z
A G AI (S) = I (S) + I (m,G)
2
A GΔ ΔI =I + md
)AGu(AGm)u,S(J)u,S(J GA
( Th de Huygens généralisé )
( Th de Huygens )
(A) (G)
d
G A (S)

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 9
III- TORSEUR CINETIQUE : . Soit (E) un ensemble matériel de masse m et de centre d’inertie G en mouvement par rapport à un repère )z , y , x , R(O
.
* Définition : Le torseur cinétique de l’ensemble matériel (E) dans son mouvement rapport au repère R , en un point A quelconque est :
C (E/R) = CP E
A
P E
AA
V(P / R)dmR (E / R)
(E / R)AP V(P / R)dm
. c
P E
R (E / R) V(P / R)dm
: est la résultante cinétique de l’ensemble matériel (E) dans son
mouvement par rapport au repère R.
. A (E / R)
= P E
AP V(P / R)dm
: est le moment cinétique au point A de l’ensemble matériel
(E) dans son mouvement par rapport au repère R. * Expression de cR (E / R)
:
G étant le centre d’inertie de (E) donc
EP
dmOPOGm
En dérivant par rapport à t dans R REPR
dmOPdt
dOG
dt
dm
dmOPdt
ddmOP
dt
d
REPREP
(valable pour un ensemble matériel (E)
a masse conservative)
Donc dmOPdt
dOG
dt
dm
REPR
D’où dm)R/P(V)R/G(VmEP
cR (E / R)
dm)R/P(VEP
)R/G(Vm
Donc C (E/R) A A
mV(G / R)=
(E / R)σ
x
y
z
O
P
dm G
(E)
. .

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 10
* Remarques :
Le torseur cinétique est aussi appelé torseur des quantités de mouvement ;
C (E/R) est un torseur donc : A B(E / R) = (E / R)+ AB mV(G / R)σ σ
( A et B deux points de l’espace )
Si la masse de (E) est supposée concentrée en son centre d’inertie G alors :
C (E/R) =G A
mV(G / R) mV(G / R)
0 AG mV(G / R)
Si (E) se réduit à une masse ponctuelle P alors :
C (P/R) =P A
mV(P / R) mV(P / R)
0 AP mV(P / R)
IV- TORSEUR DYNAMIQUE :
* Définition : Le torseur dynamique de l’ensemble matériel (E) dans son mouvement rapport au repère R , en un point A quelconque est :
D (E/R) = dP E
A
P E
AA
(P / R)dmR (E / R)
(E / R)AP (P / R)dm
. dm)R/P()R/E(REP
d
: est la résultante dynamique de l’ensemble matériel (E) dans son
mouvement par rapport au repère R.
. )R/E(A = dm)R/P(APEP
: est le moment dynamique au point A de l’ensemble matériel (E)
dans son mouvement par rapport au repère R.
* Expression de )R/E(R d :
On a
EP
dm)R/P(V)R/G(Vm
En dérivant par rapport à t dans R REPR
dm)R/P(Vdt
d)R/G(V
dt
dm
dm)R/P(Vdt
ddm)R/P(V
dt
d
REPREP
Donc dm)R/P(Vdt
d)R/G(V
dt
dm
REPR
D’où dm)R/P()R/G(mEP
)R/E(R d dm)R/P(EP
)R/G(m
Donc D (E/R) A A
mγ(G / R)=
δ (E / R)

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 11
* Remarques :
Le torseur dynamique est aussi appelé torseur des quantités d’accélération ;
D (E/R) est un torseur donc : A Bδ (E / R) = δ (E / R)+ AB mγ(G / R)
( A et B deux points de l’espace )
Si la masse de (E) est supposée concentrée en son centre d’inertie G alors :
D (E/R) =G A
m (G / R) m (G / R)
0 AG m (G / R)
Si (E) se réduit à une masse ponctuelle P alors :
D (P/R) =P A
m (P / R) m (P / R)
0 AP m (P / R)
V- RELATION ENTRE LE MOMENT CINETIQUE ET LE MOMENT DYNAMIQUE : On a A
P E
(E / R) AP V(P / R)dm
, en dérivant par rapport à t dans R :
A
R P E R
d d(E / R) AP V(P / R)dm
dt dt
= dm)R/P(VAPdt
d
EP R
= dm)R/P(VAPdt
d
EP R
+ dm)R/P(V
dt
dAP
EP R
= dm)R/P(V)R/A(V)R/P(VEP
+ dm)R/P(APEP
= dm)R/P(V)R/A(VEP
+ )R/E(A
Or )R/G(Vmdm)R/P(VEP
D’où
A A
R
dδ (E / R)= (E / R) + V(A / R) mV(G / R)
dtσ
( A est un point quelconque de l’espace ) * Cas particuliers :
Le point A est fixe dans R : A A
R
d(E / R) (E / R)
dt
Le point A est confondu avec G (A G) :
G G
R
dδ (E / R)= (E / R)
dtσ
)R/G(V//)R/A(V : A A
R
d(E / R) (E / R)
dt

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 12
VI- MOMENT CINETIQUE D’UN SOLIDE : . Soit (S) un solide de masse m et de centre d’inertie G en mouvement par rapport à un repère )z , y , x , R(O
;
. Soit A un point de (S) ;
On a A
P S
(S / R) AP V(P / R)dm
A et P sont deux points de (S) donc :
AP)R/S()R/SA(V)R/SP(V)R/P(V
Alors A
P S
(S / R) AP V(A S / R) (S / R) AP dm
dmAP)R/S(APdm)R/SA(VAPSP SP
)R/SA(VdmAPSP
))R/S(,S(J A
( )R/SA(V est indépendant de m )
Et AGmdmAPSP
D’où
AA
A
(S / R)= J (S ,Ω(S / R))+mAG V(A S / R)
= I (S) Ω(S / R)+mAG V(A S / R)
σ
( A est un point du solide (S) ) * Cas particuliers :
Le point A est fixe dans R : AA A(S / R) J (S, (S / R)) I (S) (S / R)
Le point A est confondu avec G (A G) : GG G(S / R)= J (S ,Ω(S / R))= I (S) Ω(S / R)σ
Solide (S1) en rotation autour d’un axe fixe dans le repère R :
)z , y , x , R(O
repère lié au bâti (S0) ;
1 1 1R (O , x , y , z)
repère lié à (S1) ;
L(S1/S0) = pivot d’axe (O, z)
, soit )y,y()x,x( 11
.
x
y
z
O
P
dm A .
.
(S)
O
(S1) (S0)
x
x
1x
z
y
1y
z

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 13
Soit O 1
1 1(x , y ,z)
A F E
I (S ) F B D
E D C
Le point O est fixe dans R donc O 1 O 1 1(S / R) I (S ) (S / R)
Or z)R/S( 1
donc O 1
1 1 1 1(x , y ,z) (x , y ,z)
A F E 0 E
(S / R) F B D 0 D
E D C C
O 1 1 1(S / R) E x D y C z
Remarques concernant ce cas particulier :
. Rq1 : pour un solide (S1) en rotation autour de l’axe )z,O(
fixe dans R , O 1(S / R)
n’est porté par l’axe de rotation z
( O 1(S / R) C z ) que si E = D = 0 ,
donc que si )z,O(
est un axe principal d’inertie de (S1 ) . . Rq2 : La projection du moment cinétique O 1(S / R)
sur l’axe de rotation z
est :
O 1 Ozz. (S / R) C I
avec IOz = C : moment d’inertie de (S1) par rapport à l’axe )z,O(

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 14
VII- ENERGIE CINETIQUE : L’énergie cinétique de l’ensemble matériel (E) dans son mouvement par rapport au repère R est le scalaire positif :
P E
21T(E / R) V(P / R) dm
2
IIX- ENERGIE CINETIQUE D’UN SOLIDE : . Soit (S) un solide de masse m et de centre d’inertie G en mouvement par rapport à un repère )z , y , x , R(O
;
. Soit A un point de (S) ; Par définition l’énergie cinétique de (S) dans son mouvement par rapport au repère R est :
dm)R/P(V2
1)R/S(T
SP
2
A et P sont deux points de (S) donc :
AP)R/S()R/SA(V)R/SP(V)R/P(V
Donc
SPSP
2dm)R/P(V.)R/P(Vdm)R/P(V)R/S(T2
SP
dmAP)R/S()R/SA(V.)R/P(V
SP SP
dmAP)R/S(.)R/P(Vdm)R/SA(V.)R/P(V
SP SP
dm)R/P(VAP.)R/S(dm)R/P(V.)R/SA(V
SP SP
dm)R/P(VAP.)R/S(dm)R/P(V.)R/SA(V
( )R/SA(V et )R/S( sont indépendant de m)
Donc A2T(S / R) V(A S / R).mV(G / R) (S / R) . (S / R)
D’où 2T(S/R) = V (S/R)C (S/R)
Comoment exprimé au même point A :
AA A
(S / R) mV(G / R)2T(S / R)
V(A S / R) (S / R)
donc A2T(S / R) V(A S / R).mV(G / R) (S / R). (S / R)
Comoment exprimé au même point G (centre d’inertie de (S)) :
GG G
(S / R) mV(G / R)2T(S / R)
V(G / R) (S / R)
Torseur cinématique du mouvement de (S) par rapport à R
Torseur cinétique de (S) dans son mouvement par rapport à R
. G
x
y
z
O
P
dm A .
.
(S) x
y
z
O
P
dm G
(E)
. .

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 15
donc 2
G2T(S / R) m V(G / R) (S / R). (S / R)
* Cas particuliers :
Le point A est fixe dans R : A2T(S / R) (S / R). (S / R)
Solide (S1) en rotation autour d’un axe fixe dans le repère R :
Le point O est fixe dans R donc O1 1 1 1 O 1 12T(S / R) (S / R). (S / R) (S / R).J (S , (S / R))
Or z)R/S( 1
donc :
)z,S(J.z)z,S(J.z)R/S(T2 1O2
1O1
Car l’opérateur d’inertie est linéaire
Et Oz1O I)z,S(J.z
: moment d’inertie de (S1 ) par rapport à l’axe )z,O(
Donc 2Oz1 I)R/S(T2
2Oz1 I
2
1)R/S(T
Le mouvement de (S1) par rapport à R est tel que 1Ω(S / R)=θz
(mouvement plan sur plan ou hélicoïdal …)
2
G1 1 12T(S / R) m V(G / R) (S / R). (S / R)
))R/S(,S(J.)R/S()R/G(Vm 11G1
2
Or z)R/S( 1
donc
)z,S(J.z)R/G(Vm)R/S(T2 1G
2
1
)z,S(J.z)R/G(Vm 1G2
2
Gz2
2I)R/G(Vm
Donc 2Gz
2
1 I2
1)R/G(Vm
2
1)R/S(T
Avec IGz : moment d’inertie de (S1) par rapport à l’axe )z,G(
Le solide (S1) est en mouvement de translation par rapport au repère R :
2 2
1 1
1 1T(S / R) m V(G / R) m V(A S / R)
2 2
( A (S1))
O
(S1) (S0)
x
x
1x
z
y
1y
z
O
G (S1)
x
y
1x
1y
x
y

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 16
MATRICES D’INERTIE DES SOLIDES USUELS au centre d’inertie G
a
b
c
G
z
x
y
x
y
z
L
R
G
x
y
z
L
Re
G
Ri
x
y
z
G R
PARALLELEPIPEDE PLEIN
2 2
2 2G
2 2
(x , y,z)
ma c 0 0
12m
I (S) 0 b c 012
m0 0 a b
12
2 2
2 2
G
2
(x , y,z) ou ( , ,z)
R Lm 0 0
4 12
R LI (S) 0 m 0
4 12
R0 0 m
2
CYLINDRE PLEIN
A déduire celle d’un disque dans le plan (G , x , y)
: L 0
A déduire celle d’une tige suivant z
: R 0
A déduire celle d’une plaque plane rectangulaire dans le plan (G , x , y)
: c 0. Celle d’une tige rectiligne suivant (G , x)
si
de plus a 0 plaque rectangulaire dans le plan (G , x , z)
: a 0
plaque rectangulaire dans le plan (G , y , z)
: b 0
2 2 2i e
2 2 2i e
G
2 2i e
(x , y,z) ou ( , ,z)
R R Lm 0 0
4 12
R R LI (S) 0 m 0
4 12
R R0 0 m
2
A déduire celle d’un cylindre creux d’épaisseur négligeable : Ri Re
Disque creux : L 0
CYLINDRE CREUX
SPHERE PLEINNE
2
2G
2
(x , y,z) ou ( , , )
2mR 0 0
52
I (S) 0 mR 05
20 0 mR
5

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 17
CINETIQUE (Exercices)
EXERCICE 1 : La figure ci-contre représente un cylindre plein de révolution (S) de rayon R, de hauteur h, homogène, de masse m et de centre d’inertie G. Soit R(G, x , y,z)
un repère lié à (S) tel que (G , y)
est confondu avec
l’axe de symétrie matérielle de (S). 1) Donner la matrice d’inertie du cylindre (S) au point G dans
la base (x , y,z)
. 2) Déterminer la matrice d’inertie du cylindre (S) au point H , tel que
GH R x (h / 2) y
.
EXERCICE 2 : La figure ci-contre représente un parallélépipède (S) rectangle plein, de masse m et homogène. R(G, x , y,z)
est un repère lié à (S) tel que G soit son centre
d’inertie et x
, y
et z
sont parallèles à ses arrêtes comme les montre la figure ci-contre.
1) Donner en fonction de m , a , b et c la matrice d’inertie de (S) au point G, exprimée dans la base (x , y,z)
.
2) a) Que devient cette matrice dans le cas ou (S) est un cube plein de coté a ( a = b = c) ? b) Quel est dans le même cas le moment d’inertie de (S) par rapport à n’importe quel axe passant par G ?
EXERCICE 3 : Une pale d’hélicoptère est schématisée par
une plaque plane rectangulaire (S) de largeur a, de longueur b et d’épaisseur négligeable. (S) est homogène, de masse m et de centre d’inertie G. Soit R(G, x , y,z)
un repère lié à (S) tel que l’axe
(G ,x )
soit parallèle au plus grand coté du rectangle,
et l’axe (G ,z)
perpendiculaire au plan du rectangle.
Questions : 1) Donner en fonction de m a et b la matrice d’inertie de (S) au point G dans la base (x , y,z)
notée [IG(S)]. 2) Déterminer la matrice d’inertie de (S) au point M
Dans la base (x , y,z)
. 3) En déduire le moment d’inertie de (S) par
rapport à l’axe de rotation de la pale (M, i )
tel que i cos y sin z
. 4) Déterminer la matrice d’inertie de (S) au point G
dans la base 1 1(x , y ,z)
telle que 1 1(x ,x ) (y, y )
.
EXERCICE 4 : La figure ci-contre représente un vilebrequin (S)
qu’on peut répartir en trois cylindres de révolutions (S1) , (S2) et (S3) d’axes parallèles à (O,z)
et tels que :
(S1) : de masse m1 et de centre d’inertie G1(0,0,0) ; (S2) : .. m2 .. .. .. G2(a2 ,0, c2) ; (S3) : .. m3 .. .. .. G3(a3 ,0, c3) ;
Pour chaque cylindre (Si) les moments d’inertie principaux au point Gi seront notée Ai et Ci. Question : Déterminer, dans la base (x , y,z)
la matrice d’inertie du solide (S) au point O (confondu avec G1).
M
()
(S)
G
a
b
x
y
z
1x
1y
i
G1=O G2
y
x
z
S1 G3
S2
S3
G
R
h
H
(S)
x
y
z
a
b
c
x
y
z
G
(S)

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 18
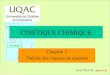
EXERCICE 5 : La figure ci-contre représente un tambour (S1) sous la forme d’un tube de diamètre D1 et d’épaisseur e1, fermé d’un coté . On peut répartir (S1) en deux parties :
Partie P1 : cylindre creux de diamètre extérieur D1 , de hauteur h1-e1 , d’épaisseur e1 et de masse mp1 ;
Partie P2 : cylindre plein de diamètre D1 , de hauteur e1 et de masse mp2 . Questions : 1) Déterminer en fonction de mp1 , mp2 , e1 et h1 les
coordonnées du centre d’inertie G1 de (S1) dans le repère 1R(C ,x , y,z)
.
2) Déterminer le moment d’inertie I1 de (S1) par rapport à l’axe 1(O , y)
. Laisser apparaître mP1 et mP2 .
EXERCICE 6 :
1) La figure 2 représente un cylindre creux (Si) de masse mi , de centre d’inertie Gi , de rayon intérieur R , d’épaisseur e et de longueur L . 1.1) Donner en fonction de mi , R , e et L la matrice d’inertie du solide (Si) au point Gi dans la base )z,y,x(
.
2) La figure 3 représente le bras d’un robot de longueur variable , il est composé de deux tubes de mêmes
formes que le solide (Si) de la figure 2 : (S1) : cylindre creux , masse m1 centre d’inertie G1 , rayon intérieur R , épaisseur e , Longueur L ; (S2) : cylindre creux , masse m2 centre d’inertie G2 , rayon extérieur R , épaisseur e , Longueur L .
Le paramètre X est assuré par un vérin d’inertie négligeable non représenté . 2.1) Déterminer en fonction de m1 , m2 , R , X , e et L le moment d’inertie du bras = S1 , S2 par rapport à l’axe )z,O( 1
.
2.2) Déterminer en fonction de R , X , e et L les coordonnées du centre d’inertie de l’ensemble = S1 , S2 dans le repère )z,y,x,O(R 1
( (S1) et (S2) ont même masse volumique).
EXERCICE 7 : La figure 4 (page 3) schématise grossièrement une hélice (H) d’hélicoptère, à quatre pales identiques (Pi) (i = 1 , 2 , 3 , 4). Chaque pale (Pi) est modélisée par une plaque plane rectangulaire. Le repère )z,y,x,A(R
est
lié à l’hélice (H) . Les quatre pales sont toutes inclinées d’un angle par rapport au plan )y,x,A(
.
Le but de cet exercice est la détermination de la matrice d’inertie [IA(H)] de l’hélice (H) = P1 , P2 , P3 , P4 au point A dans la base )z,y,x(
. On pose à priori :
e
L
O R Gi
Figure 2
O1 O2
X
e e
L
R G1 G2
Figure 3
L (Si) (S1)
(S2)
x
y
z
y
x
z
A
A h1
D1
e1
e1 P1
P2
C1
G1 yG1
O1
e1
A-A
y
y
y
x

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 19
)z,y,x(
A
CDE
DBF
EFA
)H(I
.
1) Par un raisonnement mathématique (en trois lignes maximum) montrer que 0dmxz31 PPM
et 0dmyz31 PPM
;
En déduire alors que les produits d’inertie D et E de la matrice d’inertie [IA(H)] de l’hélice (H) sont nuls .
2) Par un raisonnement mathématique (en trois lignes maximum) montrer que 0dmxy21 PPM
;
En déduire alors que le produit d’inertie F de la matrice d’inertie [IA(H)] de l’hélice (H) est nul . Par la suite on se propose de déterminer [IA(H)] pour cela on raisonnera d’abord sur une pale (Pi) : (voir figure 5) Chaque pale (Pi) est une plaque plane rectangulaire homogène , de masse m , de longueur 2L et de largeur a . 3) Déterminer , en fonction de m , a et L , la matrice d’inertie [IA(Pi)] de la pale (Pi) au point A dans la base
)k,j,i(
telle que i
et j
sont contenus dans le plan de la pale et k
perpendiculaire à celui-ci (voir figure 5) .
On considère maintenant la base )z,u,i(
telle que )k,z()j,u(
(voir figure 5) ;
4) Déterminer , en fonction de m , a , L et , le moment d’inertie de la pale (Pi) par rapport à l’axe )u,A(
.
5) Déterminer , en fonction de m , a , L et , le moment d’inertie de la pale (Pi) par rapport à l’axe )z,A(
. 6) A partir des résultats de toutes les questions précédentes déduire alors la matrice d’inertie de l’hélice (H) = P1 , P2 , P3 , P4 (voir figure 4) au point A dans la base )z,y,x(
.
Figure 4
x
y
z
A
(P1)
(P2)
(P3)
(P4)
Figure 5
u
i
j
k
2L
a
A
A
(Pi) (Pi)
.
i
j
k z

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 20
EXERCICE 8 : La figure ci-contre représente un disque (S) de masse m , homogène , d’épaisseur négligeable et de rayon 5r , il est percé de quatre trous de rayons r , l’un est centré en A et les trois autres sont également répartis sur un cercle de rayon 3r . Question : Déterminer en fonction de r et m , le moment d’inertie IAz de (S) par rapport à l’axe (A,z)
.
EXERCICE 9 :
1) On considère un solide (S1) ayant la forme d’une demi sphère pleine homogène , de rayon R et de masse M. On note R(O,x , y,z)
un repère lié à (S1) tel que
(O,z)
soit l’axe de symétrie matérielle de révolution de
(S1) , O le centre de sa surface de base et x
et y
sont situés dans le plan de celle-ci. Montrer (en utilisant le résultat de la matrice d’inertie d’une sphère pleine en son centre d’inertie) que la matrice d’inertie de la demi sphère (S1) au point O dans la base ( x , y,z)
est :
2
2O 1
2
(x , y,z)
2M.R 0 0
52
I (S ) 0 M.R 05
20 0 M.R
5
2) On considère une tige (Ti) homogène de masse m de longueur AiBi = L .
On note OAi = R. a) Déterminer en fonction de m , L et R la matrice d’inertie
de la tige (Ti) au point O dans la base i i( x , y ,z)
.
b) Déterminer en fonction de m , L, R et i le moment d’inertie de la tige (Ti) par rapport à l’axe (O,x)
.
c) Déterminer en fonction de m , L, R et i le moment
d’inertie de la tige (Ti) par rapport à l’axe (O, y)
.
3) On considère maintenant un solide 1 1 2 3(S) = S ,T ,T ,T ( figure 1 ) constitué :
D’une demi sphère (S1), de masse M et de rayon R. ( solide de la question 1) ) ; De trois tiges (T1) , (T2) et (T3) qui sont rigidement liées à (S1), ces trois tiges ont même masse m, même longueur AiBi = L et elles sont situées sur le même plan (O,x , y)
de (S1)
comme les montre la figure 1.
A
(S)
x
y
O
R
x
y
z
(S1)
x
y
Ai
Bi
ix
iy
z
i
i O
(Ti)
L

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 21
a) Montrer que la matrice d’inertie du solide 1 2 3(T) = T ,T ,T au point O, est diagonale dans la base
( x , y,z)
.
b) En déduire que la matrice d’inertie de 1 1 2 3(S) = S ,T ,T ,T au point O, dans la base ( x , y,z)
, est
de la forme :
S
O S
S (x , y,z)
A 0 0
I (S) 0 B 0
0 0 C
c) Déterminer en fonction de M , m , L et R les moments d’inertie AS , BS et Cs. Conclure.
d) On note G1 le centre d’inertie de la demi sphère (S1) tel que 1OG a z
, déterminer en fonction de a,
M et m les coordonnées du centre d’inertie GS du solide 1 1 2 3(S) = S ,T ,T ,T dans le repère
R(O,x , y,z)
.
e) Peut on pratiquement jouer sur la valeur de la masse m pour rendre GS confondu avec O.
f) Déterminer le moment d’inertie du solide 1 1 2 3(S) = S ,T ,T ,T par rapport à l’axe S(G ,x)
.
Figure 1
x
z
y
O
R
x
y
z
R
O
2
3
2
3
2
3
(T1)
(T2)
(T3)
A1
B1
A2 A3
B2 B3
(S1) (T1)
(T3)
(T2)
(S1)
Vue suivant z

CPGE –Meknès- SI-MP-PSI (21-22)
A. Balga 22
EXERCICE 10 : On considère un solide (S) constitué de deux plaques rectangulaires homogènes (P1) et (P2) qui sont rigidement liées. Les deux plaques sont identiques chacune de masse m, de centre d’inertie Gi (i=1,2) de longueur L, de largeur h et d’épaisseur négligeable.
1) Déterminer en fonction de h et L le vecteur position OG du centre d’inertie G du solide
(S) = (P1)(P2). 2) Donner en fonction de m, h et L, la matrice d’inertie de la plaque (P1) seule au point G1 dans la base
(x,y,z) .
3) Déterminer fonction de m, h et L, la matrice d’inertie de la plaque (P1) seule au point O dans la base (x,y,z) .
4) Donner en fonction de m, h et L, la matrice d’inertie de la plaque (P2) seule au point G2 dans la base (x,y,z) .
5) Déterminer en fonction de m, h et L, la matrice d’inertie de la plaque (P2) au point O dans la base (x,y,z) .
6) En déduire en fonction de m, h et L, la matrice d’inertie du solide (S) = (P1)(P2) au point O dans la base
(x,y,z) .
7) Déterminer en fonction de m, h, L et le moment d’inertie du solide (S) = (P1)(P2) par rapport à l’axe
(O,u) avec
u vecteur unitaire situé dans le plan
(O,x,y) et tel que
= (x,u) .
O
G1
G2
L
h
h
(P2)
(P1)
x
y
z
u