Embed Size (px)
Citation preview

This article was downloaded by: [McGill University Library]On: 27 October 2014, At: 09:21Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registeredoffice: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Optica Acta: International Journal ofOpticsPublication details, including instructions for authors andsubscription information:http://www.tandfonline.com/loi/tmop19
Sur la Détermination Holographique deL'état de Déformation à la Surface D'unCorps Non-transparentMichel Dubas a & Walter Schumann aa Laboratoire de Photoélasticité, Ecole polytechnique fédérale, 8006Zurich, SuissePublished online: 17 Nov 2010.
To cite this article: Michel Dubas & Walter Schumann (1974) Sur la Détermination Holographique deL'état de Déformation à la Surface D'un Corps Non-transparent, Optica Acta: International Journal ofOptics, 21:7, 547-562, DOI: 10.1080/713818929
To link to this article: http://dx.doi.org/10.1080/713818929
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the“Content”) contained in the publications on our platform. However, Taylor & Francis,our agents, and our licensors make no representations or warranties whatsoever as tothe accuracy, completeness, or suitability for any purpose of the Content. Any opinionsand views expressed in this publication are the opinions and views of the authors,and are not the views of or endorsed by Taylor & Francis. The accuracy of the Contentshould not be relied upon and should be independently verified with primary sourcesof information. Taylor and Francis shall not be liable for any losses, actions, claims,proceedings, demands, costs, expenses, damages, and other liabilities whatsoever orhowsoever caused arising directly or indirectly in connection with, in relation to or arisingout of the use of the Content.
This article may be used for research, teaching, and private study purposes. Anysubstantial or systematic reproduction, redistribution, reselling, loan, sub-licensing,systematic supply, or distribution in any form to anyone is expressly forbidden. Terms &Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

OPTICA ACTA, 1974, VOL . 21, NO. 7, 547-562
Sur la determination holographique de 1'etat de deformationa la surface d'un corps non-transparent
MICHEL DUBAS et WALTER SCHUMANNLaboratoire de Photoelasticite, Ecole polytechnique federale,8006 Zurich, Suisse
(Manuscrit regu le 9 janvier 1974 ; revision revue le 9 fevrier 1974)
Resume . La reconstitution simultanee par holographic des images d'un objetavant et pendant une sollicitation mecanique fait apparaitre des franges d'inter-ference. Ces franges presentent des proprietes interessantes, en particulier cellede n'etre visibles qu'en certains endroits seulement, c'est-a-dire d'etre localisees .Ces phenomenes ont deja etc examines en detail par plusieurs auteurs auxquelssont empruntes certains raisonnements .
Pour chaque point de la surface du corps, on peut observer les franges avecun systeme optique visant dans une direction variable . Sur une courbe de1'espace est remplie la condition de localisation complete : les ondes se super-posant en ces points ont meme difference de phase . Pour chaque direction, onpeut aussi donner 1'endroit ou le contraste des franges est maximum : on se trouveainsi sur une surface de localisation partielle .
Grace a un critere sur 1'orientation des franges, it est possible de determinerles points de localisation complete et Wen deduire par une relation lineaire 1'etat dedeformation de la surface .
Finalement la courbure de la surface et les teretes du deuxieme ordre entrenten consideration .
1. IntroductionLes nombreux travaux publics recemment sur l'interferometrie holographique
ont permis d'importants progres dans la comprehension de ces phenomenes .En nous appuyant plus specialement sur les recherches de Haines et Hildebrand[1], Stetson [2-4], Walles [5, 6], Vienot et al . [7], Froehly et al. [8], Monneret[9], Tsuruta et al. [10] et Favre [11] nous aimerions montrer ici quelles possi-bilites s'offrent a l'analyse experimentale des contraintes, en particulier com-ment l'utilisation des informations contenues dans le fait que les franges d'inter-ference sont localisees permet de determiner 1'etat de deformation a la surfaced'un corps non-transparent, reflechissant la lumiere de facon diffuse .
Nous supposerons qu'un hologramme reconstitue a la fois 1'image de l'objetavant deformation et celle de l'objet deforme (voir par ex . [12]), ce qui nouspermet de decrire la situation comme si les deux objets existaient effectivement .Les rayon lumineux renvoyes par ces deux surfaces interferent et forment unsysteme de franges plus ou moins bien visible, selon la direction et la distanceauxquelles on les observe . Il est ainsi possible de definir un lieu de localisationdes franges de deux manieres : la premiere, que nous appellerons celle de lalocalisation partielle, recherche a quelle distance de la surface de l'objet lesfranges offrent le plus de contraste, pour une direction d'observation quelconque ;la seconde, que nous nommerons celle de la localisation complete, recherche,
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
548
M. Dubas et W. Schumann
outre la distance, la direction dans laquelle la visibilite est maximale . La localisa-tion partielle fait appel au calcul des fonctions de correlation entre deux phe-nomenes optiques coherents presentant une structure spatiale aleatoire tandisque les points de localisation complete peuvent se deduire de raisonnementsgeometriques exigeant que la difference de phase des ondes reflechies sur chacundes deux objets soit stationnaire .
O
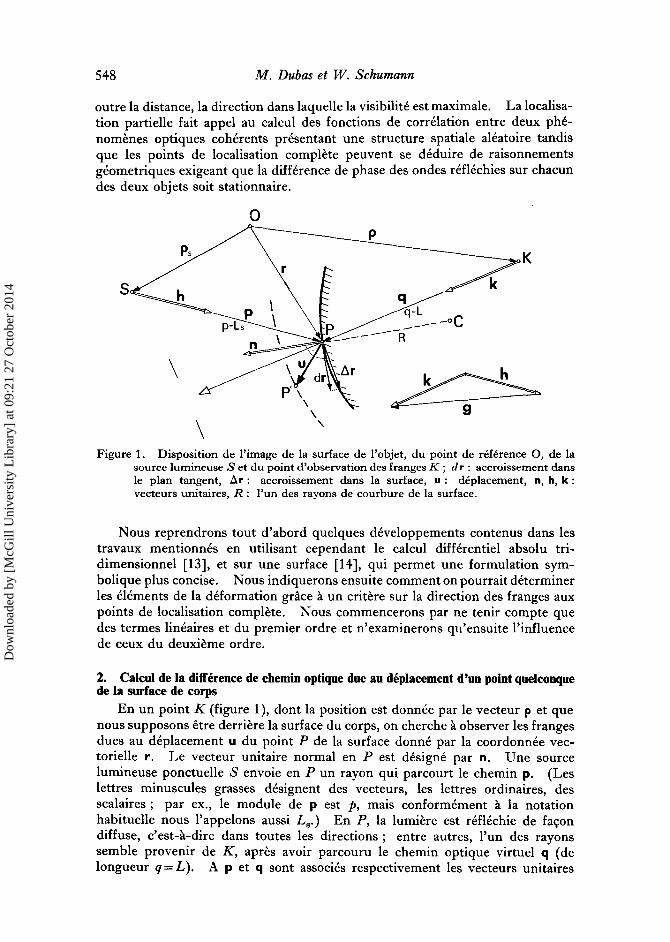
Figure 1 . Disposition de l'image de la surface de l'objet, du point de reference 0, de lasource lumineuse S et du point d'observation des franges K ; d r : accroissement dansle plan tangent, Or : accroissement dans la surface, u : deplacement, n, h, kvecteurs unitaires, R : l'un des rayons de courbure de la surface .
Nous reprendrons tout d'abord quelques developpements contenus dans lestravaux mentionnes en utilisant cependant le calcul differentiel absolu tri-dimensionnel [13], et sur une surface [14], qui permet une formulation sym-bolique plus concise. Nous indiquerons ensuite comment on pourrait determinerles elements de la deformation grace a un critere sur la direction des franges auxpoints de localisation complete. Nous commencerons par ne tenir compte quedes termes lineaires et du premier ordre et n'examinerons qu'ensuite l'influencede ceux du deuxieme ordre .
2. Calcul de la difference de chemin optique due au deplacement d'un point quelconquede la surface de corps
En un point K (figure 1), dont la position est donnee par le vecteur p et quenous supposons etre derriere la surface du corps, on cherche a observer les frangesdues au deplacement u du point P de la surface donne par la coordonnee vec-torielle r . Le vecteur unitaire normal en P est designe par n . Une sourcelumineuse ponctuelle S envoie en P un rayon qui parcourt le chemin p . (Leslettres minuscules grasses designent des vecteurs, les lettres ordinaires, desscalaires ; par ex., le module de p est p, mais conformement a la notationhabituelle nous 1'appelons aussi La.) En P, la lumiere est reflechie de facondiffuse, c'est-a-dire dans toutes les directions ; entre autres, Fun des rayonssemble provenir de K, apres avoir parcouru le chemin optique virtuel q (delongueur q=L) . A p et q sont associes respectivement les vecteurs unitaires
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

Holographie et deformation
549
p/p = h et q/q= k. Apres deformation, le point P est en P' ; le rayon reflechien P' a, par rapport a celui qui passait par P, une difference de chemin optique
D=(p-q)-(p'-q')=La C1-'C1+2 L8
p+La)]
-LC1-JC1+
2 L2q +L2)]
(1)En supposant que u << L et u << L a on obtient 1'approximation lineaire
D= -u . h + u . k = u . g,
(2)
avec le vecteur de sensibilite g qui servira a la fin de base . Le calcul nonlineaire correspondant a ce qui va suivre a ete esquisse dans [15] .
Les points voisins de P envoient eux aussi de la lumiere dans'l'ouverture dusysteme optique d'observation . Leur difference de marche peut titre exprimeeen developpant D en serie autour de P
D=D+Ar . VD+ 4Or . VVDOr+ . . .
(3)
Ar represente un accroissement sur la surface . V est l'operateur de derivationtridimensionnel qui peut s'ecrire g'alaB' avec sommation de i= 1 a 3, des vecteursde base quelconques g' et des coordonnees correspondantes O i . En introduisantun accroissement dr situe dans le plan tangent a la surface en P, ce developpe-ment devient
D=D+dr . VD+2 dr . B dr(n . VD)+-1 dr . VVD dr+ . . .,
(3')
oii B est le tenseur de courbure de la surface en P (les majuscules grasses desig-nant des tenseurs) . Nous reviendrons plus loin sur les deux termes du 2emeordre et ne considerons pour 1'instant que le terme du ler ordre . Celui-cipeut aussi s'ecrire d rN . VD = d r . N VD, avec le tenseur
N=NT=I-non,
qui fournit la projection sur le plan perpendiculaire a n. I est le tenseur identite,non est un produit dyadique. Plus generalement, rappelons la signification decod, qui est, lorsqu'il est applique a un vecteur v
c(d . v) ou (v . c)d,
selon qu'on opere de gauche ou de droite .Remarquons encore que N est le tenseur metrique de la surface du corps et
peut s'ecrire N = a-0a,, oii aa = ar/aO- est une base covariante de coordonneescurvilignes Ba sur cette surface et oii la repetition de l'indice a indique la som-mation de 1 a 2 (figure 2) . En designant par V,, = a-a/aO l'operateur dederivation bidimensionnel, on peut ecrire
NV=V,,, .
V., applique seul sur un vecteur v, dans le plan tangent par ex ., possede unepartie interieure v, 61 aaoafl dans ce plan ( I ., designant la derivee covariante) etune partie exterieure reliee a la normale n. Sauf au § 6, nous travailleronssurtout avec V, .
O.A. 2Q
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
550 M. Dubas et W. Schumann
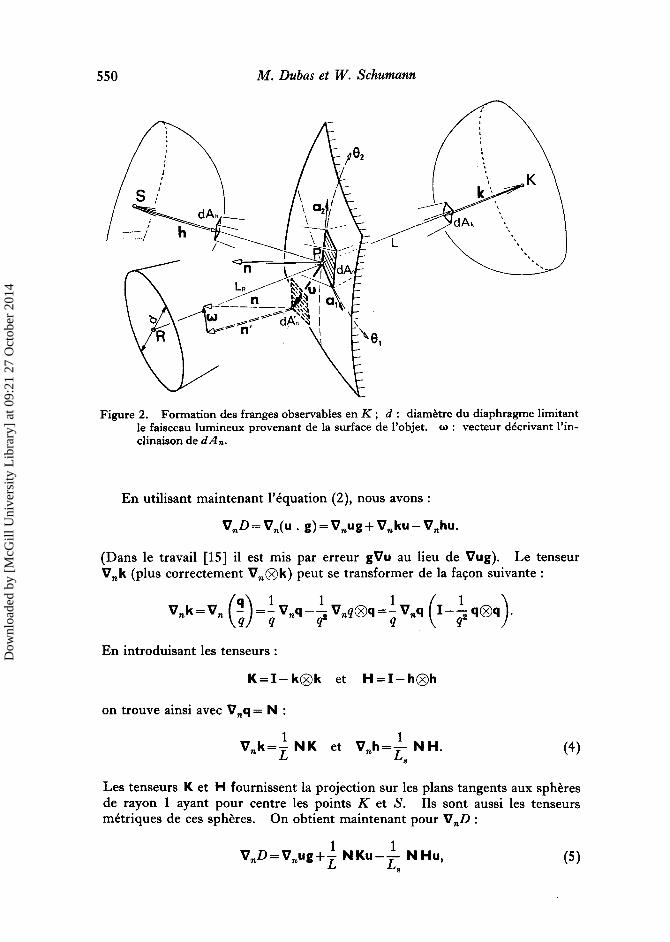
Figure 2 . Formation des franges observables en K ; d : diametre du diaphragme limitantle faisceau lumineux provenant de la surface de l'objet . w : vecteur decrivant 1'in-clinaison de dAn .
En utilisant maintenant 1'equation (2), nous avons
VnD=Vn(u . g)=Vnug+V,,, ku-Vnhu .
(Dans le travail [15] it est mis par erreur gVu au lieu de Vug) . Le tenseurVnk (plus correctement V. k) peut se transformer de la facon suivante
Vnk Vn ( 4 J g Vnq - 42 Vn4®q=gVnq (I -g2 gOq .
En introduisant les tens/eurs
/
:
K=I-k®xk et H=I-h(Dh
on trouve ainsi avec V nq = N
Vnk=L N K et Vnh=L N H .
(4)e
Les tenseurs K et H fournissent la projection sur les plans tangents aux spheresde rayon 1 ayant pour centre les points K et S . Its sont aussi les tenseursmetriques de ces spheres . On obtient maintenant pour VnD
VnD=Vnug+NKu-NHu,L
La
(5)
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

Conformement a la theorie des coques (voir par ex . [14]) la deriveeVnu = Vu u peut titre decomposee en une partie interieure y et une partieexterieure won
Vnu=y+wOx n .
Dans le cas de petites deformations le tenseur bidimensionnel y se trans-forme avec avantage en une somme de partie symetrique y et de partie anti-metrique SZE, ou E est le tenseur de permutation bidimensionnel qui fournitdans le plan tangent une rotation de Ir/2 . On fait ainsi apparaitre
la partie Ig du tenseur de dilatation y dans la surface,
la partie QEg dupivotement L E de 1'element de surface,
la partie w®x ng=w(n . g) de l'inclinaison w de cet element .
Connaissant le deplacement u par trois mesures avec vecteurs de sensibiliteg1, g2, g3, 1'expression (5) permettra par la suite de trouver la dilatation et larotation a la surface de l'objet . Nous reviendrons sur cette question plus loin .
3. Etude du contraste des frangesJusqu'a maintenant nous ne nous sommes preoccupes que de la difference
de chemin optique entre les ondes renvoyees par les surfaces non-deformee etdeformee . Dans ce paragraphe, nous allons decrire plus completement lesfranges et calculer leur contraste ou visibilite . Pour ce faire, il . est necessaired'examiner en detail comment les ondes se superposent en un point K oil l'ondesire faire une observation .
Commencons par calculer 1'amplitude des ondes qui interferent en cetendroit (figure 2) . Nous utiliserons ici le principe d'Huygens-Fresnel, qui,comme font demontre les calculs de Helmholtz et Kirchhoff, est applicablelorsque 1'ouverture des faisceaux de lumiere interferant est faible . Cette condi-tion est remplie ici puisque S et K sont eloignes de la surface et que la pupillede la lunette d'observation est petite .
La source S envoie en P une onde spherique, qui y provoque une vibrationde la forme
C nA hexp
(2A p).
/P
C'est a 1'amplitude C pres la fonction de Green pour p > A . La lumiere estrenvoyee par la surface de 1'objet ; si 1'on suppose que la diffusion est parfaite,on peut admettre que chaque point de cette surface se comporte comme une
2Q2
Holographie et deformation
ou, en introduisant le vecteur
w= Vug-L Hu,a
551
VnD= Nw+L N Ku.
(5')
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

552
M. Dubas et W. Schumann
source d'Huygens-Fresnel . La vibration envoyee en K par les sources fictivesdu corps non-deforme est alors
U(P)= f f f(r) (napq
k) exp 2~i (p- q) dAn.
(6)
An est la surface de 1'objet qui envoie de la lumiere dans la lunette d'observation ;J (r) est une fonction complexe caracterisant le pouvoir de reflexion et la rugositede la surface . Notons que (n . h)(n . k) pourrait aussi s'ecrire sous la formequadratique n . (h®x k)n .
L'amplitude due a la lumiere renvoyee par le corps deforme est, de la mememaniere
U'(P)=f f f(r') (n.')(q . W) exp 2si
(p'-q') dAn' .
Voyons quelles relations existent entre U(p) et U'(p), en tenant compte dufait que les deplacements et les deformations de l'objet sont tres petits. Puisque1'on considere le meme point de la surface avant et apres la deformation, onpeut poser
f(r) = f(r') .
Les vecteurs p', q', n' sont transformes de la fawn suivante
p'=p+u, q'=q+u, n'=n-w .
On obtient alors avec u << q et w << 1
n' .k' n' .q' (n-w) . (q+u) - n . k to .k 1q'2
q2 +2u q+u2
q +
q
4 +i n . [u-2k(k . u)] ;
et on peut ecrire 1'approximation
n' .k' n .k
n' .h' n .hq , - q ,
p' - p
Quant a 1'element de surface, it est egal adAn = al x a2 l dOl dB 2 ;
mais comme a,,'= r,,,'= as + u ,a= (I + V nu)Taa , on trouve avec la trace tr y
dA,'= (1+tr 1) dA, -- dA, .
Nous pourrons donc negliger par la suite la variation due a la deformationdu facteur dAn(n . h)(n . k)/A2pq. Celui-ci influence en effet l'amplitude dela vibration lumineuse et par consequent le detail du profil des franges, maisnon leur position qui, elle, depend de la phase . Il faut encore noter que lalimite du domaine d'integration An change par suite du deplacement u puisquele systeme optique ne suit pas ce mouvement . Nous verrons plus loin pourquelles raisons on peut confondre An et An ' . Nous ecrirons des lors
U'(P) =ff f(r) (n - A)pq . k) expf27z (p' -4)I dAn.
(7)
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
Holographie et deformation
553
Les equations (6) et (7) sont equivalentes par ex . a celles de Haines et Hildebrand[1] ou de Monneret [9] .
Notons, en outre que 1'integration sur la surface de 1'objet peut titre remplaceepar une integration sur la surface de Tune des spheres de rayon 1 centrees en Sou en K. On passe ainsi d'un element dA,, a un element dAh ou dAk par lestransformations suivantes
2
2
dA,, = - h dAh et dA,, = nq kdAk .
On aurait par ex. sur la sphere centree en K
U(P)=f I f(r) (nA2p)4
exp f2AZ (p-q) dAk .
Az
Si 1'on groupe certains termes, en remarquant que q = r - p, on peut aussi ecrire
U(P)=f f f(r)(n~2p)4 eXp (2!a (p-
k . r)}exp C2a1
k . p~ dAk ,AA;
ce qui est equivalent a l'equation (10) de Walles [6] ou 11 31 de Monneret [9] .Reprenons maintenant 1'equation (7) et etudions le chemin optique en un
point voisin de P
p-q=p'-q'+D=p'-q'+D+ dr .V„D+ . . . .
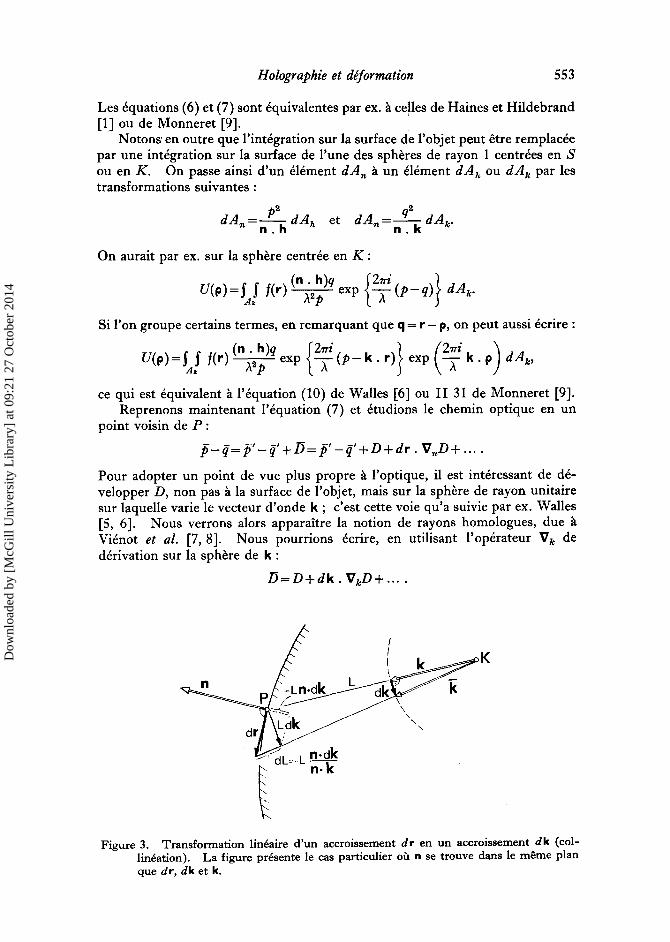
Pour adopter un point de vue plus propre a 1'optique, it est interessant de de-velopper D, non pas a la surface de 1'objet, mais sur la sphere de rayon unitairesur laquelle varie le vecteur d'onde k ; c'est cette voie qu'a suivie par ex . Walles[5, 6] . Nous verrons alors apparaitre la notion de rayons homologues, due aVienot et al . [7, 8] . Nous pourrions ecrire, en utilisant l'operateur V k dederivation sur la sphere de k
D=D+dk . VkD+ . . . .
Figure 3 . Transformation lineaire d'un accroissement d r en un accroissement d k (col-lineation) . La figure presente le cas particulier ou n se trouve dans le meme planque dr, dk et k.
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
554
M. Dubas et W. Schumann
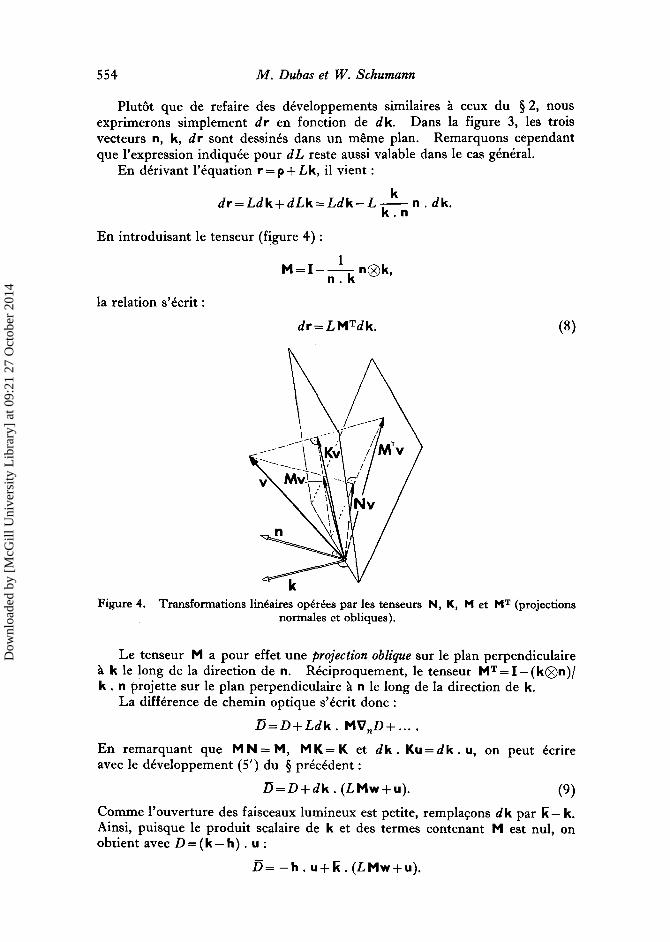
Plut6t que de refaire des developpements similaires a ceux du § 2, nousexprimerons simplement dr en fonction de d k . Dans la figure 3, les troisvecteurs n, k, dr sont dessines dans un meme plan . Remarquons cependantque 1'expression indiquee pour dL reste aussi valable dans le cas general .
En derivant 1'equation r = p + Lk, it vient
dr=Ldk+dLk=Ldk-Lkkn n . dk.
En introduisant le tenseur (figure 4)
M=I- n 1 k n0 k,
la relation s'ecrit
dr=LMTdk . (8 )
kFigure 4. Transformations lineaires operees par les tenseurs N, K, M et MT (projections
normales et obliques) .
Le tenseur M a pour effet une projection oblique sur le plan perpendiculairea k le long de la direction de n . Reciproquement, le tenseur MT=I-(k®n)/k . n projette sur .le plan perpendiculaire a n le long de la direction de k .
La difference de chemin optique s'ecrit donc
D=D+Ldk . MV,D+ . . . .
En remarquant que M N = M, M K = K et d k . Ku = d k . u, on peut ecrireavec le developpement (5') du § precedent
D=D+dk . (LMw+u) .
(9)
Comme 1'ouverture des faisceaux lumineux est petite, remplacons d k par k - k.Ainsi, puisque le produit scalaire de k et des termes contenant M est nul, onobtient avec D = (k - h) . u
D= -h . u+IR . (LMw+u).
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

Holographie et deformation
555
En introduisant ce resultat dans l'equation (7) et en la comparant A 1'ex-pression de U(p) (6), it vient
U'
ex p
h . u U u-LMw .(P)= P ( ~
(P-
)
(10)
Lorsque le point P de la surface se deplace en P', la vibration qu'il envoie vienten un point K', dont la position differe de celle de K par le vecteur u + L Mw .Les rayon PK et P'K' sont appeles homologues. Leur distance mesureeperpendiculairement a k s'obtient en appliquant le tenseur K au vecteur ci-dessus .
Des amplitudes, nous pouvons maintenant deduire l'intensite et le contrastedes frange's . L'amplitude totale U(p) + U'(p) = Ut donne l'intensite (l'asterisqueindique le conjugue complexe)
UtUt*= UU*+ U'U'*+ U*U'+ UU'* .
Pour tenir compte de la rugosite de la surface, nous ferons apres Walles [6]le raisonnement suivant : la phase dans la fonction f(r) varie de facon aleatoired'un point de la surface a 1'autre. Pour eliminer cette influence, nous prendronsla valeur escomptee E[ ] des diverses grandeurs . L'intensite J est alors, sil'on pose E[UU*] = I et E[ U* U] = P
J=I+I'+F+F* .
Puisque les deplacements sont tres petits, nous pouvons admettre que I = I' ;ainsi, la definition du contraste ou visibilite nous donne avec (10)
V_Jma%-Jmin-IE[U U ]
Jmax + Jmin
I
=I IE[U*(P)U(P - u - LMw)]I .
(11 )
Finalement, nous pouvons maintenant comprendre comment it est possiblede confondre la limite d'integration de An avec celle de An' ; pour une fonctionquelconque F(r), on a, si F(r)=F(r')
I f F dAn=f f F dAn+ f FY . MTu ds .A„
A„
aA„
2An represente le contour de An, v, un vecteur normal unitaire sur ce contour,dans le plan tangent 'a la surface, s est 1'arc sur le contour, MTu, la composanteoblique du deplacement sur le plan tangent . En designant par d le diametredu diaphragme limitant le faisceau de lumiere provenant de la surface, et parLR sa distance a la surface du corps, on obtient la condition sous laquelle 1'inte-grale sur le contour est negligeable
IKu I<<L Ld.R
4. Localisation complete et localisation partielleLe point de localisation est celui oil le phenomene d'interference est le
mieux visible ; ce point est bien stir celui oil le plus grand nombre possible de
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
556
M. Dubas et W. Schumann
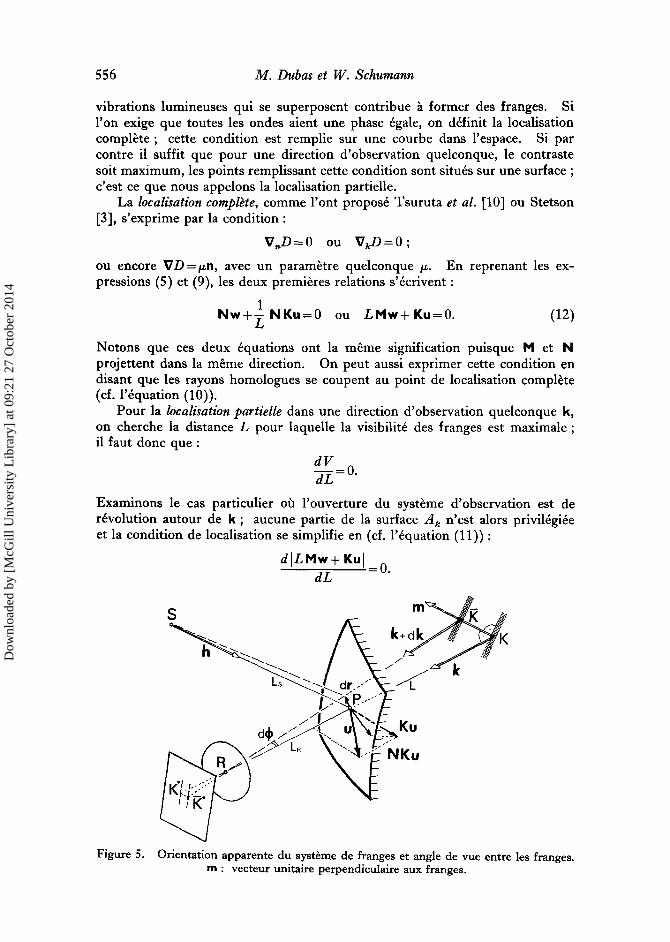
vibrations lumineuses qui se superposent contribue a former des franges . Sil'on exige que toutes les ondes aient une phase egale, on definit la localisationcomplete ; cette condition est remplie sur une courbe dans 1'espace . Si parcontre it suffit que pour une direction d'observation quelconque, le contrastesoit maximum, les points remplissant cette condition sont situes sur une surface ;c'est ce que nous appelons la localisation partielle .
La localisation complete, comme l'ont propose Tsuruta et al. [10] ou Stetson[3], s'exprime par la condition
V.D=O ou VkD=O ;
ou encore VD=µn, avec un parametre quelconque µ . En reprenant les ex-pressions (5) et (9), les deux premieres relations s'ecrivent
Nw+L NKu=O ou LMw+Ku=O .
(12)
Notons que ces deux equations ont la meme signification puisque M et Nprojettent dans la meme direction . On peut aussi exprimer cette condition endisant que les rayons homologues se coupent au point de localisation complete(cf. 1'equation (10)) .
Pour la localisation partielle dans une direction d'observation quelconque k,on cherche la distance L pour laquelle la visibilite des franges est maximale ;it faut donc que
dV _dL-0.
Examinons le cas particulier ou l'ouverture du systeme d'observation est derevolution autour de k ; aucune partie de la surface Ak n'est alors privilegieeet la condition de localisation se simplifie en (cf . 1'equation (11))
dILMw+ Ku) -dL
-0.
Figure 5 . Orientation apparente du systeme de franges et angle de vue entre les franges.m : vecteur unitaire perpendiculaire aux franges .
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

Holographie et deformation
557
Ceci revient alors a dire que la distance entre les rayons homologues est minimale .On tire de cette equation la distance de localisation
L
(Mw) . ( Ku).
(13)
Ce resultat est identique a celui de Walles [6] .Lorsque la condition de localisation complete est remplie, le contraste est
maximal, quelle que soit la forme de l'ouverture du systeme d'observation ; en
effet, la difference de chemin optique est la meme pour tout le voisinage de P .
Voyons maintenant comment se presentent les franges quand le systemed'observation se trouve en un point R (figure 5) . Soit m un vecteur unitaire
perpendiculaire a k et do= - m . dk un accroissement dans cette direction ;
on a les relations
dk= - mdo, dr=LRMTmd¢.
La difference de chemin optique en K est D ; en un point voisin K elle estD + dD, avec
dD=du . g+dk . u-dh . u=dr . Nw+dk . Ku .
En eliminant dr et dk a 1'aide des relations ci-dessus, on obtient
dDd~= m . (LRMw- Ku).
Determinons maintenant l'orientation du systeme de franges ainsi quel'accroissement do d'une frange a 1'autre. Si m est perpendiculaire aux franges,
dD/dc I est maximum avec la condition auxiliaire m . m =1 . En utilisant
un multiplicateur de Lagrange X, ceci s'exprime par
LRMw- Ku-Xm=O .
Le vecteur m est donc parallele a LRMw- Ku, mais en general oblique par
rapport a Ku (voir aussi [6] ou [9]) .Aux points de localisation complete par contre, la condition (12) nous donne
dD_ LR+Ldo
L
rn . Ku .
(14)
Par le meme raisonnement sur le maximum de IdD/dcl, on trouve ici que mest parallele a Ku, quel que soit LR ; aux points de localisation complete les franges
apparaissent donc perpendiculaires a la composante laterale du deplacement . Ceci
constitue un critere necessaire et suffisant qui permet de distinguer les points
de localisation complete des autres points .
5. Determination pratique des elements de la deformation
Voyons maintenant comment, a partir de la localisation complete, on peut
calculer les elements du tenseur Vnu = y + OE + won . Pour trouver un point
de localisation, on pourrait proceder ainsi : on cherche d'abord la direction du
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

558
M. Dubas et W. Schumann
deplacement u a 1'aide de plusieurs vecteurs g (voir par ex . [16]) ; ou bien,on fait varier la direction d'observation k, les franges se deplacant alors dans1'espace, jusqu'a ce que l'on vise la frange d'ordre maximum possible. On aen ce cas : Dmax=(u . k)max-u . h . Le maximum de u . k est atteint si kest parallele a u. On cherche ensuite une autre direction k telle que les franges,encore floues, apparaissent perpendiculairement a la direction de Ku . Il nereste plus alors qu'a faire varier la distance de mise au point, c'est-a-dire L,jusqu'a ce que les franges soient bien nettes. On aurait ainsi la position d'unler point de localisation complete par kl et Ll . En repetant cette operationpour deux autres points (eventuellement avec d'autres sources S), on pourraitecrire, avec (12)
Vnugi+ 1L NKiu- 1L NHu=O, i=1, 2, 3 .L i
Ceci nous conduit aussi directement a la relation entre Vnu et la differencede chemin optique . En effet, les Di = u . g i peuvent titre interpretes comme lescomposantes covariantes du deplacement dans un systeme de reference ayantpour base covariante les trois vecteurs de sensibilite g i . Si l'on definit ensuitela base contravariante gJ par
gi - g'= 8i'=1, si i= j,
0, si i :h j,
on a la representation (la repetition de l'indice j implique la sommation de 1 a 3)
u=D;g' .
Les conditions de localisation complete deviennent alors
(V.Ugi=
- 1L NKi-F 1L NH Djgi, i=1, 2, 3 .2
8
Formons finalement le produit dyadique avec gi (contraction) ; it vient, puisquegi®gz =l
Vnu=(-L NKi +L N Hl D1gi® gi .
(15)Li
ss
On obtiendrait ainsi, en se referant au plan tangent de la surface du corps, lessix equations lineaires permettant de determiner les trois composantes de ladeformation y, le pivotement L et les deux composantes de 1'inclinaison w .
Justifions encore l'existence de points de localisation complete . L'iterationdont on va faire usage ne permet cependant pas de considerer ce raisonnementcomme une demonstration mathematique rigoureuse . Remarquons d'abordque 1'equation (12) est satisfaite pour k=ku parallele a u, et pour L=O. Cecas ne fait toutefois pas partie de la theorie lineaire presentee ici, oil u < L .Cherchons ensuite un vecteur k= ku + i k, voisin de kn ; l'equation (12) ecritesons la forme
LMVnu(ku +Ok-h)+u-(ku+Ak)(k . u)-L M Hu=OL.
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

Holographie et deformation
559
doit titre satisfaite pour un petit LOO. En remarquant que k . u=u[1-(Ok)2/2]+ . . . , on obtient
Ok=L
C MVnu(k,,,-h)-LaMHu1+L MVnuLk+ . . . .
J
Comme nous avons suppose que la deformation etait petite, c'est-a-direVnu << 1, it existe une constante Lu >u et telle que (Lulu) MVnuLk < j0k .Choisissons donc un L intermediaire, Lu << L < u, pour lequel le terme(L/u)MVnuzk est negligeable par rapport a Ok . En remplacant cette premiereapproximation de Lk dans (L/u) MVnuzk, on arrive, en admettant la con-vergence de l'iteration, a un Ok bien determine, c'est-a-dire a une localisationcomplete avec un L :A 0 .
Si la source S est placee a l'infini, it est possible d'exprimer Vnu en fonctionde la direction m et de la derivee de D, c'est-a-dire la distance entre les frangesvoisines . On a avec 1'equation (14)
- Ku=dD
LR+L m,
ce qui donne comme conditions de localisation complete
dDi 1
Vnugi= do LR+L2N mi , i=1,2,3 .
6. Influence de la courbure de la surface du corps et des termes du second ordre sur la phaseNous reprenons maintenant le developpement (3') ou plus particulierement
les deux termes du second ordre . On obtient ces termes en developpant lechemin optique le long d'une geodesique r(s) par ex . (s designe l'arc)
2D=D+ dDds+jd-D ds 2 + . . . .
Mais comme dD/ds=dr/ds . VD, on trouve avec la courbure normalen . d2r/ds2 et le tenseur de courbure B = - V n de la surface
d2D _ dr
dr d2r
dr
dr dr . dr. VVD -+- . VD=- VVD -+- . B - (n . VD).
ds2 ds
ds ds2
ds
ds ds
ds
On pourrait aussi operer avec Vn au lieu de V, le terme contenant B seraitalors cache dans VnVnD, et it faudrait suivre certaines regles de derivation surune surface . Nous preferons cependant cette maniere de faire qui comprendune extrapolation de la phase en dehors de la surface ; on separe ainsi tout desuite 1'influence de la courbure de la surface et les calculs sont plus directs .Pour simplifier 1'ecriture, nous supposons que la source S est situee a 1'infini .
Comme VD =Vug+ Ku/L, la seconde derivee VVD contient certains tenseursV
du 3e ordre, VVu par exemple, qu'il faudrait, pour titre exact, ecrire Vo u .
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014

560
M. Dubas et W. Schumann
C
Plus generalement on utilisera ici la notion d'un produit triadique b®d, dont lasignification est, applique sur un vecteur v
c
c
(c . V)
(v . b)& d ou b®x (d . v) ou b(Dd
selon qu'il est applique vers la gauche, la droite ou le haut . On voit ainsi que,des trois vecteurs b, c et d, aucun n'est privilegie . Nous ecrivons done
vVVD=V®xug+Vg(Vu)T+V (L)®Ku+LVKu+LVuK .
En explicitant les derivees
k
OV ~L)=-
L2, Vg=L K, VK= -L (K(Dk+K),
on obtient apres quelques transformations
VVD=VVug+L [Vu K+ K(Vu)T]-L2 [k®x Ku + Ku®x k+(u . k)K], (16)
et
B(n . VD)=B(n . Vug)+L B(n . Ku) .
(17)
Si le plus petit rayon de courbure Rmin est beaucoup plus petit que L,1'expression (17) domine a condition que VVu soit petit (deformation quasi-homogene) . La difference de chemin optique sera alors stationnaire jusqu'auterme du second ordre si
n . VD=O.
(18)
L'equation (18) et la condition de localisation complete (12) donnent ensemblela condition d'une localisation ' absolue '
VD=O
(19)
que l'on ne peut satisfaire que pour un nombre fini de directions k, pour les-quelles, malgre la presence de la courbure de la surface de l'objet, les frangesdevraient titre les meilleures .
En ce qui concerne 1'etude des termes du second ordre, comme VVu, itfaudrait examiner d2D/d02 . Le plus commode est que les franges presententun point singulier : dD/do est alors nul pour toute direction m, c'est-a-dire
LRMw- Ku=O.
Avec la condition de localisation complete, cela definit une situation dans laquellea la fois Ku = 0 et Mw = 0 . Comme L est ici arbitraire, les franges ne sont plus
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
Holographie et deformation
561
localisees . Ce cas West evidemment possible que pour certaines positions Lo, h ode la source S. En utilisant 1'equation (15) et en remarquant que k= ku , onobtient comme condition
(.N H-L- N K21 ku(g'' . go) =Lo N Hoku. (20)
7 . Conclusion
Apres avoir mis en parallele trois definitions de la localisation, repetonsencore quelques-uns des aspects mentionnes . La localisation partielle peut sefaire dans une direction quelconque meme si les franges ne presentent pas uncontraste maximum . Pour obtenir la deformation et la rotation de 1'elementde surface, it est necessaire de mesurer 6 distances de localisation L et ecrire 6equations non-lineaires du type de 1'equation (13). La localisation completepar contre permettrait de determiner les composantes de la deformation et de larotation en connaissant 3 points de localisation a 1'aide d'equations lineaires (15) ;cependant, it faut d'abord s'assurer que 1'on ait bien affaire a des points de phasestationnaire . Le critere qui permet de reperer ces points est base sur l'orienta-tion des franges . Finalement la localisation absolue joue eventuellement unrole dans le cas d'objets avec surface fortement courbe et le cas des franges nonlocalisees, avec singularite, pourrait servir, en combinaison avec les conditionsd'equilibre, a l'etude de la loi constitutive d'un corps non-transparent .
The simultaneous reconstruction of an object before and after deformation by use of adouble-exposed hologram makes visible fringes of interference . The fringes show interest-ing properties ; in particular they are only visible at certain regions in space, i .e . they arelocalized . The phenomenon has already been examined in detail by several authors ; wetake up again some of their developments .
At every point of the surface of the body one can observe the fringes with an opticalsystem aligned in any direction . The condition of complete localization is only fulfilledon a line in space ; the waves of light which superpose there have all the same phase shift .On the other hand, for any given direction one can also find the distance where the contrastof the fringes is maximum ; this leads to a surface of partial localization.
A criterion for the orientation of the fringes allows us to determine the points of completelocalization and thereafter the surface strain and rotation by means of linear relations .
Finally the influence of the surface curvature and of the second-order terms is considered .
Die gleichzeitige Rekonstruktion eines Objektes vor and nach seiner Verformung durchHolographic bringt Interferenzstreifen in Erscheinung. Diese Streifen besitzen interessanteEigenschaften, insbesondere sind sic klar nur an gewissen Stellen des Raumes sichtbar, d.h .sie sind lokalisiert. Das Phanomen ist Schon ausftihrlich von mehrenen Autoren beschriebenworden, von denen wir hier gewisse Ueberlegungen ubernehmen .
Fur jeden Punkt auf der Oberflache des Kbrpers kann man flaue Streifen in beliebigerRichtung beobachten oder mit einem entsprechend gerichteten optischen System aufnehmen .Die Bedingung der vollstandigen Lokalisation ist dagegen nur auf einer Kurve im Raumerfiillt. Die Lichtwellen superponieren sich dort mit gleicher Phasendifferenz . Anderseitskann man auch fur eine beliebige Richtung die Distanz suchen, wo der Kontrast der Streifenmaximal ist, man findet so eine Flache partieller Lokalisation .
Dank eines Kriteriums fiber die Orientierung der Streifen ist es moglich die Orte voll-standiger Lokalisation zu bestimmen and daraus mittels einer linearen Beziehung dieFormanderungen and die Drehung des Oberflachenelementes zu ermitteln .
Schliesslich wird der Einfluss der Oberflachenkriimmung and der Glieder zweiterOrdnung betrachtet.
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014
562
Holographie et deformation
REFERENCES
HAINES, K. A ., and HILDEBRAND, B. P ., 1966, Appl . Optics, 5, 595 .STETSON, K. A., 1969, Optik, 29, 386.STETSON, K. A ., 1970, Optik, 31, 576.STETSON, K . A ., Y. opt. Soc. Am . (a paraitre) .WALLES, S., 1970, Ark. Fys ., 40, 299 .WALLES, S., 1970, Optica Acta, 17, 899 .VIENOT, J . CH., FROEHLY, C., MONNERET, J., and PASTEUR, J ., 1968, Symp. on the Eng .
Uses of Holography, Glasgow (Cambridge University Press) .FROEHLY, C., MONNERET, J ., PASTEUR, J ., and VIENOT, J. CH., 1969, Optica Acta, 16,
343 .MONNERET, J., 1973, These de Doctorat d'Etat, Universite de Besancon .TSURUTA, T., SHIOTAKE, N., and ITOH, Y ., 1968, Japan,. appl. Phys ., 7, 1092 .FAYRE, H., 1929, Rev. d'Optique, 8, 193, 241, 289 .FRANCON, M., 1969, Holographie (Paris : Masson et Cie) .LEIGH, D . C., 1968, Nonlinear Continuum Mechanics (New York : McGraw-Hill) .STEELE, C . R., 1971, Int. Y. Engng Sci ., 9, 681 .SCHUMANN, W., 1973, Exp. Mech ., 13, 225 .SCIAMMARELLA, C . A ., et GILBERT, J. A ., 1973, Appl. Optics, 12, 1951 .
Dow
nloa
ded
by [
McG
ill U
nive
rsity
Lib
rary
] at
09:
21 2
7 O
ctob
er 2
014











![Janvier 2010 Contraintes de déformation par stéréoscopie Contraintes de déformation par Shape From Shading Dans le deuxième procédé [3], le jeu de contraintes](https://img.pdfslide.fr/doc/110x75/551d9dc5497959293b8e248c/janvier-2010-contraintes-de-deformation-par-stereoscopie-contraintes-de-deformation-par-shape-from-shading-dans-le-deuxieme-procede-3-le-jeu-de-contraintes.jpg)

















