Embed Size (px)
Citation preview
N° d’ordre : 30 / IRS / TCO Année Universitaire : 2015 - 2016
UNIVERSITE D’ANTANANARIVO
----------------------
ECOLE SUPERIEURE POLYTECHNIQUE
-----------------------
MENTION TELECOMMUNICATION
MEMOIRE
en vue de l’obtention
du DIPLOME de Master
Titre : Ingénieur
Domaine : Sciences de l’Ingénieur
Mention : Télécommunication
Parcours : IRS
par : RATOVO Fenosoa
SYSTEME DE SURVEILLANCE A DISTANCE
IMPLEMENTANT LA RECONNAISSANCE FACIALE
ET LA DETECTION DE MOUVEMENT
Soutenu le Vendredi 17 Février 2017 devant la Commission d’Examen composée de :
Président :
M. RATSIHOARANA Constant
Examinateurs :
Mme RAMAFIARISONA Hajasoa Malalatiana
M. RASAMOELINA Jacques Nirina
M. BOTO ANDRIANANDRASANA Jean Espérant
Directeur de mémoire :
M. ANDRIAMIASY Zidora
i
REMERCIEMENTS
Je tiens à louer le Seigneur et Lui rendre Gloire pour toutes les bénédictions et interventions qu’Il a
témoignées dans ma vie.
Je tiens également à remercier toutes les personnes qui ont contribué à la réalisation de ce présent
mémoire. Cordialement à :
- Monsieur ANDRIANAHARISON Yvon, Professeur Titulaire, Responsable du domaine des
Sciences de l’Ingénieur;
- Monsieur RAKOTOMALALA Mamy Alain, Maître de conférences, Responsable de la
Mention Télécommunication, pour avoir accepté ma soutenance de mémoire de fin d’études.
- Monsieur ANDRIAMIASY Zidora, Maître de conférences et Directeur de Mémoire, pour le
temps qu’il m’a accordé, pour son aide et ses conseils inestimables durant la préparation de
ce travail.
Ensuite mes vifs et sincères remerciements sont adressés aux enseignants qui sont membres du jury
de cette soutenance malgré leurs obligations:
- Monsieur RATSIHOARANA Constant, Maître de conférences au sein de l’ESPA, qui me
fait l’honneur de présider le jury de soutenance de ce mémoire
- Madame RAMAFIARISONA Hajasoa Malalatiana, Maître de conférences au sein de
l’ESPA
- Monsieur RASAMOELINA Jacques Nirina, Assistant d’enseignement supérieur et de
recherche
- Monsieur BOTO ANDRIANANDRASANA Jean Espérant, Assistant d’enseignement
supérieur et de recherche au sein de l’ESPA
J’adresse également mes sincères remerciements à tous les enseignants de la Mention
Télécommunication, les enseignants de l’Ecole Supérieure Polytechnique d’Antananarivo, les
intervenants et toutes les personnes qui, par leurs paroles, leurs écrits, leurs conseils et leurs
critiques, ont guidé mes réflexions.
Je ne saurais oublier d’exprimer un chaleureux remerciement envers toute ma famille pour leur
soutien tant bien moral que matériel et qui m’a permis de poursuivre mes études.
Et enfin je remercie tous mes proches qui ont contribué, de près ou de loin, à l’élaboration du présent
mémoire.
ii
TABLE DES MATIERES
REMERCIEMENTS ........................................................................................................................ i
TABLE DES MATIERES .............................................................................................................. ii
NOTATIONS .................................................................................................................................. vi
ABREVIATIONS .......................................................................................................................... vii
INTRODUCTION GENERALE ................................................................................................... 1
CHAPITRE 1 LA TELESURVEILLANCE ................................................................................. 2
1.1 Introduction ............................................................................................................................... 2
1.2 Utilisations .................................................................................................................................. 2
1.3 La vidéosurveillance .................................................................................................................. 3
1.3.1 Présentation générale de la vidéosurveillance ................................................................... 3
1.3.2 Objectif d’un système de vidéosurveillance ........................................................................ 3
1.3.3 Composition d’un système de vidéosurveillance ........................................................... 4
1.3.3.1 Les équipements de gestion ........................................................................................... 4
1.3.3.2 La connectique de vidéosurveillance ............................................................................ 5
1.3.3.3 Les équipements de réception ....................................................................................... 5
1.3.3.4 Les équipements de visualisation .................................................................................. 5
1.3.4 Architecture d’une installation de vidéosurveillance......................................................... 5
1.3.4.1 Installation en circuit fermé ou CCTV (Closed Circuit Television) ............................. 6
1.3.4.2 Installation en circuit ouvert ou OCCTV (Open Closed Circuit Television) ................ 6
1.4 Typologie des systèmes de caméra de surveillance ................................................................ 7
1.5 Images numériques ................................................................................................................... 8
1.5.1 Définition ............................................................................................................................. 8
1.5.2 Types d’images .................................................................................................................... 9
1.5.2.1 Images matricielles ou images bitmap .......................................................................... 9
1.5.2.2 Images vectorielles ...................................................................................................... 10
1.5.3 Définition et résolution ..................................................................................................... 11
1.5.4 Représentation des couleurs ............................................................................................. 11
1.5.4.1 Images 24 bits ou « couleurs vraies » ......................................................................... 12
1.5.4.2 Images à palettes, images en 256 couleurs (8 bits) ..................................................... 13
1.5.4.3 Images en teintes ou niveaux de gris ........................................................................... 14
1.6 La vidéosurveillance et le respect du cadre légal ................................................................. 15
iii
1.6.1 Loi Pasqua ......................................................................................................................... 15
1.6.2 Code du travail ................................................................................................................... 16
1.7 Conclusion ................................................................................................................................ 16
CHAPITRE 2 SYSTEME DE TRANSMISSION ...................................................................... 17
2.1 Introduction ............................................................................................................................. 17
2.2 Modem ...................................................................................................................................... 17
2.2.1 Présentation de la technologie .......................................................................................... 18
2.2.2 Signaux de contrôle d’un modem ..................................................................................... 18
2.2.3 Procédure typique d’émission ........................................................................................... 19
2.3 Universal Serial Bus ou USB .................................................................................................. 19
2.3.1 Evolution de la norme USB .............................................................................................. 19
2.3.1.1 USB 1.0 et USB 1.1 .................................................................................................... 20
2.3.1.2 USB 2.0 ....................................................................................................................... 20
2.3.1.3 USB 3.0 ....................................................................................................................... 20
2.3.1.4 USB 3.1 ....................................................................................................................... 21
2.3.2 Fonctionnement du bus USB ............................................................................................ 21
2.4 Bluetooth .................................................................................................................................. 22
2.4.1 Définition ........................................................................................................................... 22
2.4.2 Objectif ............................................................................................................................... 22
2.4.3 Caractéristiques ................................................................................................................. 23
2.4.4 Topologie du réseau .......................................................................................................... 24
2.5 Wi-Fi ......................................................................................................................................... 26
2.5.1 Structure ............................................................................................................................ 26
2.5.2 Mode de mise en réseau .................................................................................................... 27
2.5.2.1 Mode « Ad-hoc » ......................................................................................................... 27
2.5.2.2 Mode « infrastructure » ............................................................................................... 28
2.6 Le réseau GSM ........................................................................................................................ 29
2.6.1 Architecture réseau ........................................................................................................... 29
2.6.1.1 Le centre de commutation mobile ............................................................................... 31
2.6.1.2 L'enregistreur de localisation nominale....................................................................... 32
2.6.1.3 Le centre d'authentification. ........................................................................................ 32
2.6.1.4 L'enregistreur de localisation des visiteurs.................................................................. 33
2.6.1.5 L'enregistreur des identités des équipements .............................................................. 33
2.6.2 Caractéristiques de l’interface radio du réseau GSM ...................................................... 33
iv
2.6.3 Short Message Service ....................................................................................................... 34
2.6.3.1 Classes de SMS ........................................................................................................... 35
2.6.3.2 Architecture du service SMS point à point ................................................................. 35
2.7 Conclusion ................................................................................................................................ 36
CHAPITRE 3 SYSTEME D’ACQUISITION D’IMAGES ....................................................... 37
3.1 Introduction ............................................................................................................................. 37
3.2 Fonctions d’une installation ................................................................................................... 37
3.2.1 Acquisition d’images ......................................................................................................... 37
3.2.2 Traitement de l’information .............................................................................................. 38
3.2.3 Présentation des résultats .................................................................................................. 38
3.3 Détection de mouvement par segmentation de premier plan et d’arrière-plan ................ 38
3.3.1 Mise en correspondance des différents clusters ............................................................... 39
3.3.2 L’adaptation ....................................................................................................................... 39
3.3.3 La normalisation ............................................................................................................... 40
3.3.4 La classification ................................................................................................................. 40
3.4 Détection faciale et suivi ......................................................................................................... 42
3.4.1 Introduction ....................................................................................................................... 42
3.4.2 Problématique .................................................................................................................... 42
3.5 Méthode de Viola et Jones ...................................................................................................... 42
3.5.1 Aspects de la méthode ........................................................................................................ 43
3.5.2 Notion de caractéristiques ................................................................................................. 43
3.5.2.1 Description .................................................................................................................. 43
3.5.2.2 Calcul .......................................................................................................................... 44
3.5.3 Sélection de caractéristiques par boosting ....................................................................... 45
3.5.4 Cascade de classifieurs ...................................................................................................... 46
3.6 Etapes clés de la détection faciale .......................................................................................... 47
3.6.1 Apprentissage ..................................................................................................................... 47
3.6.2 Détection ............................................................................................................................ 47
3.7 Reconnaissance faciale ............................................................................................................ 48
3.7.1 Principe .............................................................................................................................. 48
3.7.2 Génération des eigenfaces ................................................................................................. 50
3.7.3 Utilisation des eigenvectors ............................................................................................... 51
3.8 Conclusion ................................................................................................................................ 54
CHAPITRE 4 PRESENTATION ET FONCTIONNEMENT DU SYSTEME ....................... 55
v
4.1 Introduction ............................................................................................................................. 55
4.2 Description ............................................................................................................................... 55
4.2.1 Position du problème ......................................................................................................... 55
4.2.2 Description du système ...................................................................................................... 55
4.2.3 Principe de fonctionnement et structure .......................................................................... 56
4.3 Objectifs ................................................................................................................................... 57
4.4 Présentation de la réalisation ................................................................................................. 57
4.4.1 Choix du langage............................................................................................................... 57
4.4.2 Diagramme de classe de l’application .............................................................................. 59
4.4.3 Interface graphique ........................................................................................................... 60
4.4.4 Configuration matérielle :................................................................................................. 61
4.4.5 Configuration de l’application .......................................................................................... 61
4.4.5.1 L’onglet « Général » ................................................................................................... 61
4.4.5.2 L’onglet « Options Avancées » ................................................................................... 64
4.4.5.3 L’onglet « Autres » ..................................................................................................... 67
4.5 Réalisation pratique ................................................................................................................ 68
4.5.1 Configuration .................................................................................................................... 69
4.5.2 Fonctionnement et résultats .............................................................................................. 73
4.6 Estimation du coût de la réalisation ...................................................................................... 74
4.7 Conclusion ................................................................................................................................ 75
CONCLUSION GENERALE ...................................................................................................... 76
ANNEXE 1 CARACTERISTIQUES DES MATERIELS UTILISES ..................................... 77
ANNEXE 2 EXTRAITS DE LA LISTE DE CAMERAS SUPPORTEES ............................... 79
ANNEXE 3 EXTRAITS DE CODES SOURCES JAVA ........................................................... 80
ANNEXE 4 MISE EN PLACE DU SYSTEME DE TELESURVEILLANCE ........................ 82
BIBLIOGRAPHIE ........................................................................................................................ 84
FICHE DE RENSEIGNEMENTS ............................................................................................... 85
vi
NOTATIONS
1. Minuscules latines
ℎ𝑗 Classifieur faible
ℎ(𝑥) Classifieur fort
𝑖 Image
𝑖𝑖 Image intégrale
n Nombre total des images
p Motif
𝑤𝑘 Poids d’un cluster
𝑥𝑖 Images
𝑦𝑖 Etiquette associée à une image
2. Majuscule latine
I Image
K Nombre d’étages
𝐿 Paramètre de contrôle de la rapidité de changement de scène
P Proportion occupée par l’arrière-plan
S Somme des poids des clusters dans le groupe
T Nombre d’itérations
vii
ABREVIATIONS
2D Deux Dimensions
3D Trois Dimensions
AuC Authentification Center
BSC Base Station Controller
BTS Base Transmitter Station
CCTV Closed Circuit Television
CD Carrier Detect
CMJN Cyan Magenta Jaune Noir
CTS Clear To Send
DAO Dessin Assisté par Ordinateur
DCE Data Communications Equipment
DSR Data Set Ready
DSSS Direct Sequence Spread Spectrum
DTE Data Terminal Equipment
DTR Data Terminal Ready
EDGE Enhanced Data Rates for GSM Evolution
EIR Equipment Identity Register
FHSS Frequency-Hopping Spread Spectrum
GMSC Gateway Mobile Switching Center
GMSC Gateway Mobile Switching Center
GND Ground
GPRS General Packet Radio Service
GPS Global Positioning System
GSM Global System for Mobile Communication
HLR Home Local Register
IDE Integrated Development Environment
IMEI International Mobile Equipment Identity
viii
IMSI International Mobile Subscriber Identity
IP Internet Protocol
IWMSC Interworking Mobile Switching Center
JPG Joint Photographic Experts Group
JPS Joint Photographic Experts Group Stereo
JRE Java Runtime Environment
JVM Java Virtual Machine
LLC Logical Link Control
LUT Look-Up Table
MAC Media Access Control
MSC Mobile Switching Center
OCCTV Open Closed Circuit Television
OFDM Orthogonal Frequency-Division Multiplexing
OSI Open Systems Interconnection
PC Personal Computer
PCA Principal Component Analysis
PDA Personal Digital Assistant
PPP Point par Pouce
RGB Red Green Blue
RI Ring Indicator
RNIS Réseau Numérique à Intégration de Service
RTC Réseau Téléphonique Commuté
RTS Request To Send
RVB Rouge Vert Bleu
SIM Subscriber Identity Module
SME Short Message Entity
SMS Short Message Service
SMSC Short Message Service Center
TSL Teinte Saturation Luminance
ix
USB Universal Serial Bus
USIM Universal Subscriber Identity Module
VLR Visitor Location Register
VMSC Visited Mobile Switching Center
WiFi Wireless Fidelity
1
INTRODUCTION GENERALE
Depuis le 20è siècle, des problèmes d’insécurité, de vol et de crimes dominent la vie quotidienne de
la population. Chaque individu vit de plus en plus dans la frustration et l’inquiétude d’être la
prochaine victime des dangers imminents causés par les actes immoraux d’autrui. Ce projet consiste
justement à présenter une application servant à résoudre ces différents problèmes. En effet, cette
application en question se base sur un système de sécurisation à distance dont la principale
particularité est la possibilité de s’affranchir des problèmes liés à la distance tout en mettant à la
disposition de l’utilisateur une technique permettant de procéder à la reconnaissance faciale.
Les progrès incessants remarqués dans le domaine de la télécommunication n’ont fait que renforcer
et améliorer l’efficacité de la télésurveillance. Effectivement, la télécommunication fournit divers
moyens mettant en profit l’utilisation d’un système de télésurveillance. Elle permet l’obtention d’un
système de transmission fiable, sécurisé, rapide tout en respectant la confidentialité.
Ce mémoire qui s’intitule « Techniques de sécurisation implémentées par un système de
télésurveillance » se divise en quatre chapitres.
Le premier chapitre expliquera les informations théoriques concernant la télésurveillance ainsi que
son utilisation au niveau d’une entreprise ou à usage personnel.
Dans le second chapitre, on parlera des différents moyens, techniques et matériels mis en œuvre pour
le bon fonctionnement de l’application élaborée. Parmi ces techniques se trouvent les différentes
technologies de réseau sans fils et les ports de communication.
Le troisième chapitre parlera en détails des différents procédés techniques pour la mise en place de la
détection et de la reconnaissance faciale.
Le dernier chapitre expliquera en détails la réalisation proprement dite.
2
CHAPITRE 1
LA TELESURVEILLANCE
1.1 Introduction
La télésurveillance est un système technique structuré en réseau permettant de surveiller à distance
des lieux publics ou des lieux privés, des machines ou des individus.
Ce système s'est généralisé à Londres durant les années 1980, suite aux attentats menés par l'Armée
républicaine irlandaise. Et c'est également en Angleterre, bien avant qu'il ne devienne une réalité,
que sont nées les premières inquiétudes quant à son utilisation à des fins de contrôle social.
La justification de son utilisation pour contrer le terrorisme est renforcée au XXIe siècle, au
lendemain des attentats du 11 Septembre 2001, mais elle est également invoquée comme un
instrument de prévention contre la délinquance dans les villes, ce qui n'est pas sans provoquer des
réactions de contestation de la part d'intellectuels et d'associations œuvrant pour la défense des
libertés individuelles.
1.2 Utilisations
La télésurveillance est employée dans de nombreuses situations, généralement pour des raisons de
sécurité :
- dans le cadre de la sécurité routière, au moyen de caméras spécialisées ou des capteurs à
proximité voire noyés dans la chaussée. Ces équipements permettent d'évaluer la densité du
trafic, les ralentissements qui peuvent en découler, la présence de personnes sur les bandes
d'arrêt d'urgence ;
- pour la surveillance des machines : divers capteurs permettent d'évaluer l'état de la machine,
ces informations peuvent alors être envoyées à un poste de surveillance. L'épuisement de
consommables, une anomalie de fonctionnement ou même un acte de malveillance serait alors
détecté à distance ;
- dans le cadre de la prévention de la délinquance avec notamment la vidéosurveillance ;
- pour la surveillance de lieux sensibles (banques, centrales nucléaires, etc.) et d'habitations,
afin de prévenir les intrusions, les cambriolages et les actes de vandalisme ;
- pour la surveillance à distance des enfants et des personnes vulnérables.
3
1.3 La vidéosurveillance
1.3.1 Présentation générale de la vidéosurveillance
La vidéosurveillance est un système de caméras et de transmission d'images, disposé dans un espace
public ou privé pour le surveiller à distance ; il s'agit donc d'un type de télésurveillance. Les images
obtenues avec ce système, peuvent être traitées automatiquement et/ou visionnées puis archivées ou
détruites. La surveillance a pour but de contrôler les conditions de respect de la sécurité, de la sûreté
ou de l'exécution d'une procédure particulière.
1.3.2 Objectif d’un système de vidéosurveillance
L'objectif général d'un système de vidéosurveillance est de contribuer à la sécurité de biens et/ou de
personnes. [1]
Cette contribution peut se focaliser sur diverses composantes, souvent imbriquées :
- Prévention de la criminalité
La vidéoprotection permet l'augmentation des taux d'élucidation des crimes et délits.
Dans cette approche, les systèmes de vidéosurveillance permettent également de décompter les
clients d'une boutique, ou des véhicules entrant et sortant d'une entreprise, voire, potentiellement,
d'incruster dans l'image vidéo le montant d'un ticket de caisse ou les informations d'un badge ou
d'une carte d'accès, de reconnaître automatiquement les plaques d'immatriculations des véhicules
(permet l'accès d'un parking sans ticket, clé ou badge), de signaler automatiquement un objet égaré,
abandonné ou volé.
- Sécurité routière
Dans le domaine de la sécurité routière, la vidéosurveillance permet notamment de lever les angles
morts. Ainsi, dans certains camions de ramassage d'ordures, le chauffeur peut voir les mouvements
des employés à l'arrière de son véhicule. Cette technique est également utilisée dans les transports
publics.
4
La vidéosurveillance se développe pour l’accès en temps réel de la circulation routière des voies les
plus fréquentées (autoroutes, voies rapides) ainsi que pour la détection d’accident. Des compagnies
privées mesurent le niveau de circulation pour informer les conducteurs équipés d’un GPS.
- Sécurité industrielle
Dans le domaine de la sécurité industrielle, des sites de production sont équipés de systèmes de
vidéosurveillance permettant notamment de multiplier les points d'observation en temps réel de l'état
des installations et du déroulement du procédé.
- Sûreté
Au titre de la sûreté, divers lieux (sites industriels, installations stratégiques, objets du patrimoine...)
sont vidéosurveillés pour prévenir les intrusions et les dégradations de la part de personnes
malveillantes.
1.3.3 Composition d’un système de vidéosurveillance
1.3.3.1 Les équipements de gestion
Pour la gestion du système de vidéosurveillance et l’exploitation des images filmées, il y a plusieurs
équipements. Mais pratiquement, on doit choisir les équipements de gestion nécessaires en fonction
des besoins exprimés par le client dans le cahier des charges.
Parmi ces équipements, on peut citer l’enregistreur pouvant se présenter sous la forme d’un
ordinateur, et permet de stocker les images, de piloter et programmer le système. Les modèles les
plus simples stockent les images et permettent de les visualiser. L’enregistreur peut également être
dématérialisé sous la forme d’un cloud, un serveur distant où sont stockées les images. Cette option
nécessite une liaison à internet et fonctionne habituellement sous forme d’abonnement au cloud
sécurisé du fournisseur de la caméra.
5
1.3.3.2 La connectique de vidéosurveillance
La connectique permet de relier les caméras à l’enregistreur. Il s’agit de câble blindé conçu pour
acheminer les signaux vidéo de la caméra vers l’enregistreur.
1.3.3.3 Les équipements de réception
L’élément fondamental qui assure la réception dans un système de vidéosurveillance, c’est la
caméra. En fonction de l’environnement, du besoin de l’utilisateur et du budget alloué à ce système,
on doit choisir les caméras adéquates pour bien filmer les zones à surveiller.
Les caméras peuvent être intérieures ou extérieures. On distingue également les caméras simples de
celles à vision nocturne. Les premières ne sont fonctionnelles qu’en plein jour ou dans des locaux
éclairés, les secondes peuvent fonctionner de jour comme de nuit. La sensibilité des caméras
infrarouges est variable, certains modèles fonctionnent dans l’obscurité totale, d’autres nécessitent
un seuil minimal d’illumination. L’un des critères principaux des caméras de vidéosurveillance est
leur résolution. La haute définition permet de filmer des détails et de procéder à une identification
précise des personnes filmées.
1.3.3.4 Les équipements de visualisation
L’équipement de base qui assure la visualisation des images filmées en directe par les caméras ou
enregistrées dans un système de vidéosurveillance, c’est le moniteur « écran ». Mais actuellement
le client a plus de choix entre une visualisation fixe au bureau sur un téléviseur ou sur un PC et une
visualisation mobile et même à distance par internet via un PC, tablette ou smartphone. Suivant le
besoin de l’utilisateur, on doit choisir les dimensions et la technologie de ce dernier.
1.3.4 Architecture d’une installation de vidéosurveillance
Deux architectures se présentent pour un système de vidéosurveillance : l’installation en circuit
fermé et l’installation en circuit ouvert. [3]
6
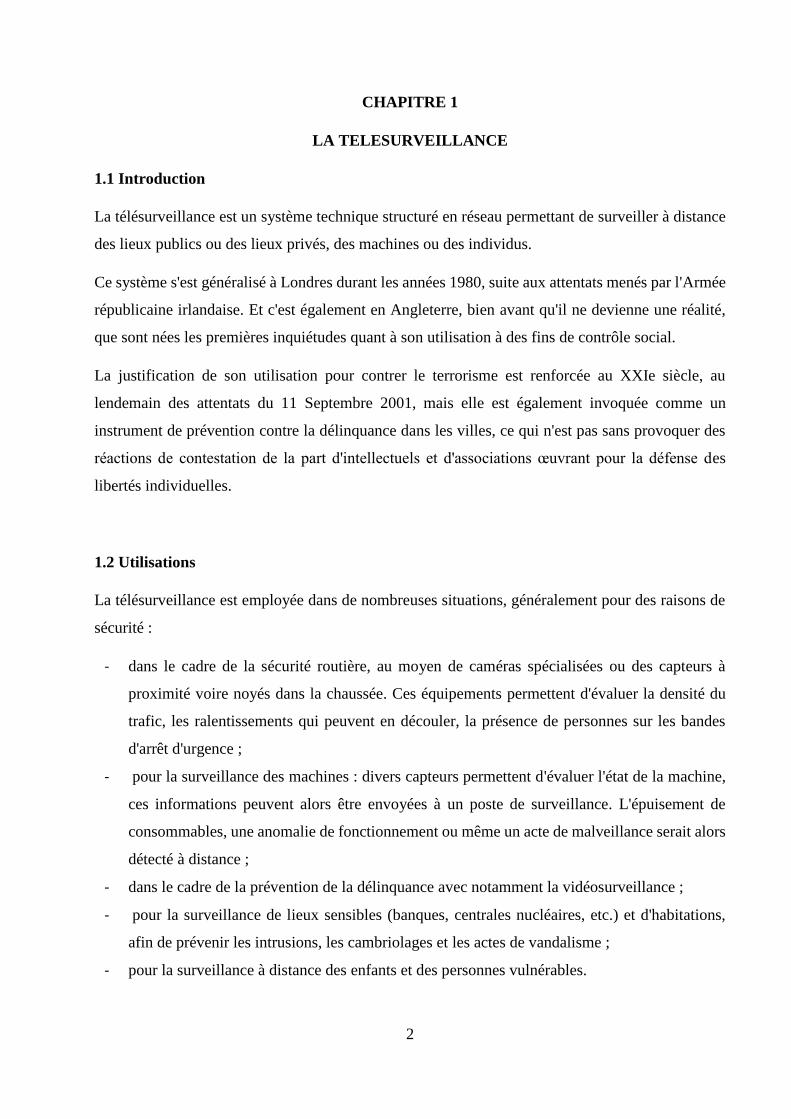
1.3.4.1 Installation en circuit fermé ou CCTV (Closed Circuit Television)
Le principe d’un système en circuit fermé est de relier sur le même réseau interne à une structure
des caméras, un ou plusieurs moniteurs et éventuellement un enregistreur. Pour ce type
d’installation, les images ne seront pas diffusées en temps-réel en dehors de l’entreprise. Elles ne
peuvent être accédées que par celui qui est relié au réseau.
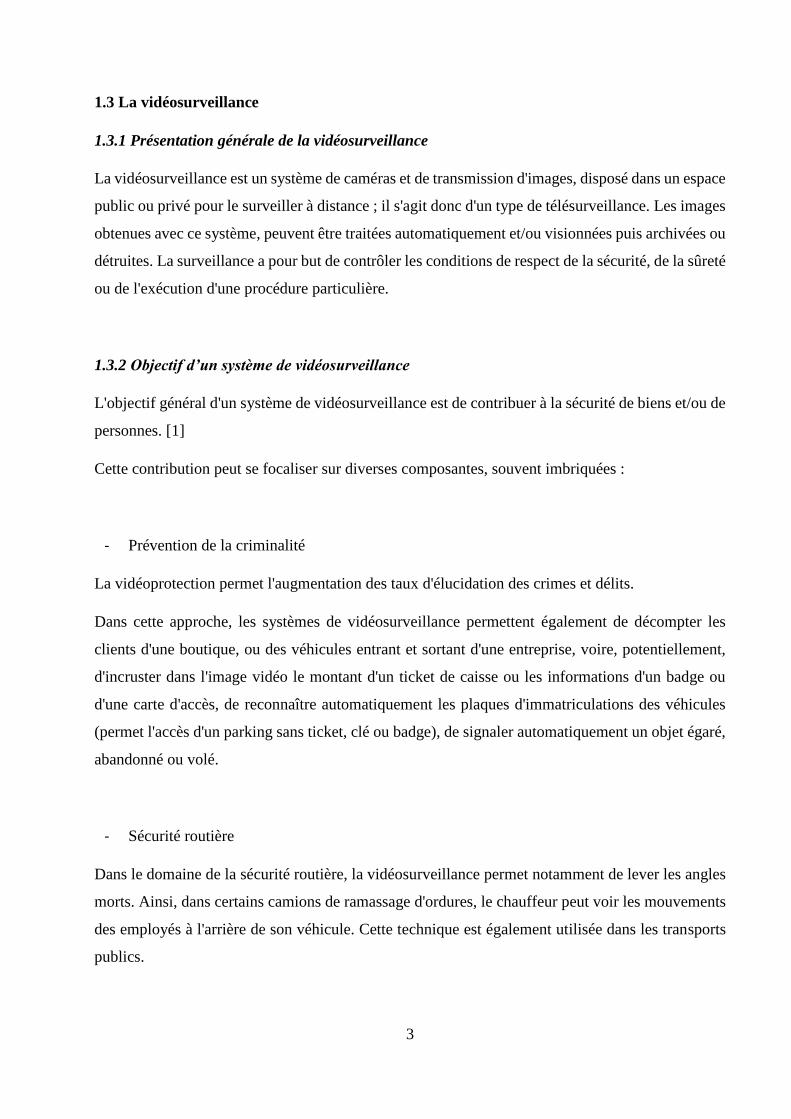
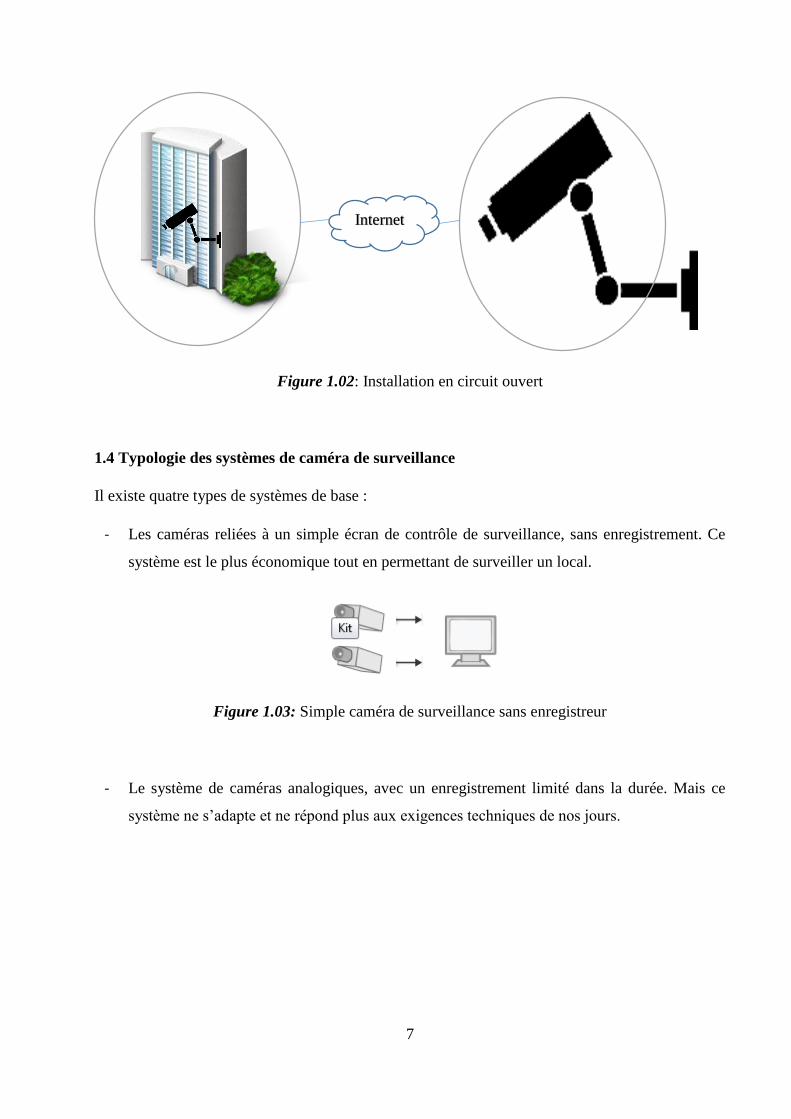
1.3.4.2 Installation en circuit ouvert ou OCCTV (Open Closed Circuit Television)
A l’inverse de la précédente architecture, l’installation en circuit ouvert est un système connecté à
un réseau extérieur. Cette architecture offre de nombreux avantages tels que : la surveillance de
locaux à distance, la télésurveillance et la surveillance multi-sites. Le développement d’internet
ainsi que les améliorations successives du débit de transmission sont la principale cause de la mise
en place de ce type d’installation. En effet, grâce à cette architecture, le système est relié à un réseau
extérieur par l’intermédiaire d’internet. Cet aspect permet à un utilisateur d’effectuer une
surveillance à distance en toute sécurité.
Figure 1.01: Installation en circuit fermé
7
Figure 1.02: Installation en circuit ouvert
1.4 Typologie des systèmes de caméra de surveillance
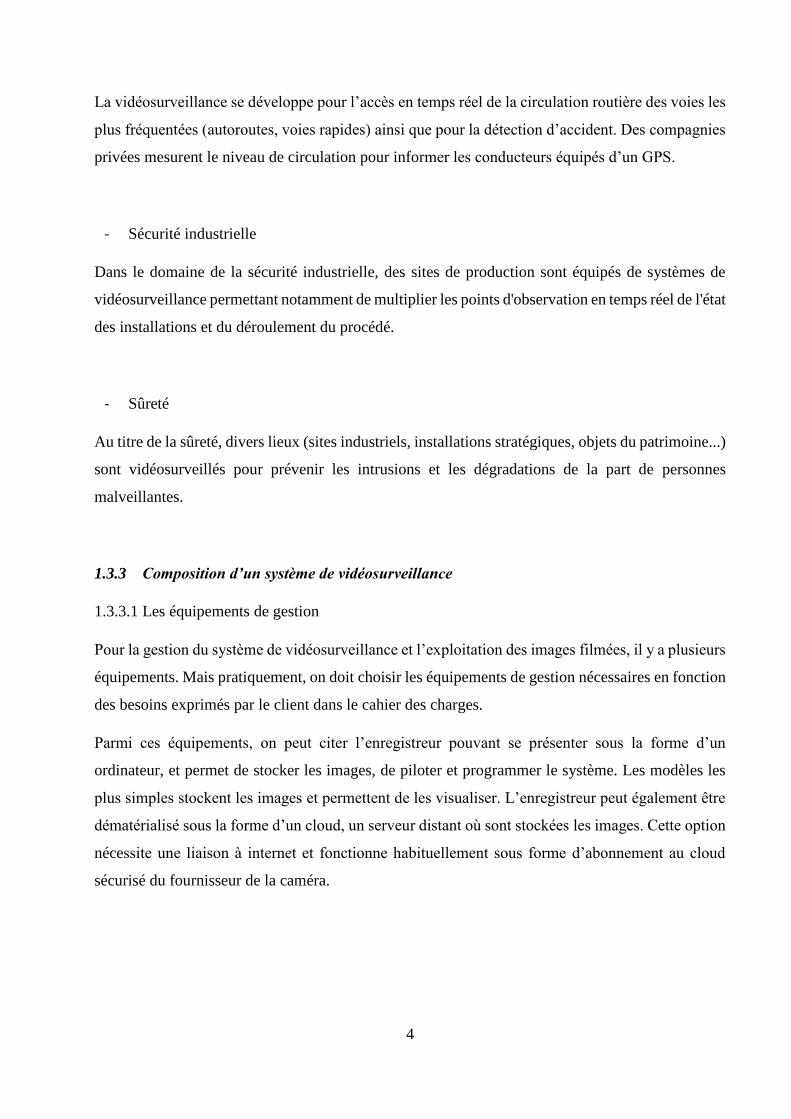
Il existe quatre types de systèmes de base :
- Les caméras reliées à un simple écran de contrôle de surveillance, sans enregistrement. Ce
système est le plus économique tout en permettant de surveiller un local.
Figure 1.03: Simple caméra de surveillance sans enregistreur
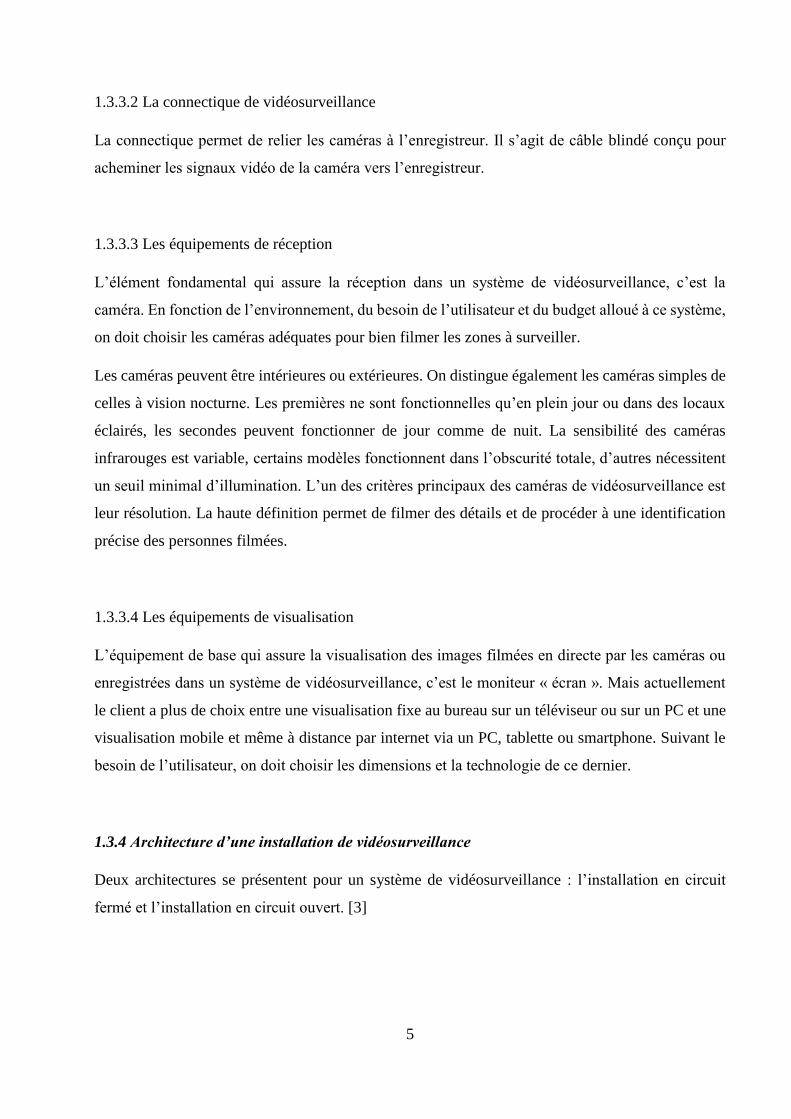
- Le système de caméras analogiques, avec un enregistrement limité dans la durée. Mais ce
système ne s’adapte et ne répond plus aux exigences techniques de nos jours.
Internet
8
Figure 1.04: Caméra de surveillance avec enregistreur
- Le système intégrant caméras analogiques et numériques. Ce système favorise l’introduction
des fonctions comme la détection d’objet et tout ce qui peut s’y référer.
- Les caméras numériques consultables via Internet appelées aussi caméra IP. Ces caméras
compressent numériquement les images et sont capables de fournir des vidéos en haute
résolution tout en minimisant la bande passante utilisée.
1.5 Images numériques
L’image constitue l’élément de base d’un système de vidéosurveillance. C’est celle qui sera traitée
afin de pouvoir prendre une décision adéquate. Il en revient alors de définir ce qu’est une image
numérique. [4]
1.5.1 Définition
L’image numérique désigne toute image (dessin, icône, photographie…) acquise, créée, traitée et
stockée sous forme binaire. En effet, ces images peuvent être :
- acquises par des convertisseurs analogique-numérique situés dans des dispositifs comme les
scanners, les appareils photo ou les caméscopes numériques, les cartes d’acquisition vidéo qui
numérisent directement une source comme la télévision
- créées directement par des programmes informatiques, grâce à une souris, des tablettes
graphiques ou par de la modélisation 3D
- traitées grâce à des outils Graphique, de façon à y appliquer différentes fonctions telles que la
transformation, la modification de taille, de couleurs, l’ajout ou la suppression d’éléments et
l’application de filtres variés.
9
- stockées sur un support informatique.
1.5.2 Types d’images
1.5.2.1 Images matricielles ou images bitmap
Ce type d’images est composé d’une matrice de points à plusieurs dimensions, chaque dimension
représentant une dimension spatiale (hauteur, largeur, profondeur), temporelle (durée) ou autre (par
exemple, un niveau de résolution).
a. Images 2D
Dans le cas des images à deux dimensions, les points sont appelés pixels. D'un point de vue
mathématique, on considère l'image comme une fonction de ℝ 𝑥 ℝ dans ℝ où le couplet d'entrée
est considéré comme une position spatiale, le singleton de sortie comme un codage.
Ce type d'image s'adapte bien à l'affichage sur écran informatique mais il est en revanche peu adapté
pour l'impression, car la résolution des écrans informatiques, généralement de 72 à 96 ppp ou
« points par pouce » est bien inférieure à celle atteinte par les imprimantes, au moins 600 ppp
aujourd'hui. L'image imprimée, si elle n'a pas une haute résolution, sera alors plus ou moins floue
ou laissera apparaître des pixels carrés visibles.
b. Images 2D + t (vidéo), images 3D, images multi-résolution
- Lorsqu'une image possède une composante temporelle, on parle d'animation.
- Dans le cas des images à trois dimensions, les points sont appelés des « voxels ». Ils
représentent un volume.
Ces cas sont une généralisation du cas 2D, la dimension supplémentaire représentant respectivement
le temps, une dimension spatiale ou une échelle de résolution.
D'un point de vue mathématique, il s'agit d'une fonction de ℝ 𝑥 ℝ 𝑥 ℝ dans ℝ.
10
c. Images stéréoscopiques
Il s'agit d'un cas particulier dans lequel on travaille par couples d'images, ces derniers pouvant être
de n'importe lequel des types précédents.
Il existe un grand nombre de sortes d'images stéréoscopiques, et encore un plus grand nombre de
moyens pour les observer en relief, mais le codage recommandé par les organisations internationales
de stéréoscopie est désigné comme « jps » (Joint Photographic Experts Group Stereo), c'est-à-dire
un format « jpg » (Joint Photographic Experts Group) dans lequel les deux vues gauche et droite
sont juxtaposées dans un même fichier, le plus souvent 2 048 × 768, chacune des deux vues étant
inscrite dans un rectangle 1 024 × 768 et, si son rapport largeur sur hauteur n'est pas égal à 4
3 , chaque
vue est complétée dans ce rectangle par deux bandes noires symétriques, soit en haut et en bas, soit
à gauche et à droite.
1.5.2.2 Images vectorielles
Le principe est de représenter les données de l'image par des formules géométriques qui vont
pouvoir être décrites d'un point de vue mathématique. Cela signifie qu'au lieu de mémoriser une
mosaïque de points élémentaires, on stocke la succession d'opérations conduisant au tracé. Par
exemple, un dessin peut être mémorisé par l'ordinateur comme « une droite tracée entre les points
(x1, y1) et (x2, y2) », puis « un cercle tracé de centre (x3, y3) et de rayon 30, de couleur rouge ».
L'avantage de ce type d'image est la possibilité de l'agrandir indéfiniment sans perdre la qualité
initiale, ainsi qu'un faible encombrement. L'usage de prédilection de ce type d'images concerne les
schémas qu'il est possible de générer avec certains logiciels de DAO (Dessin Assisté par Ordinateur)
comme AutoCAD ou CATIA. Ce type d'images est aussi utilisé pour les animations Flash, utilisées
sur Internet pour la création de bannières publicitaires, l'introduction de sites web, voire des sites
web complets.
Étant donné que les moyens de visualisation d'images actuels comme les écrans d'ordinateur
reposent essentiellement sur des images matricielles, les descriptions vectorielles (Fichiers) doivent
préalablement être converties en descriptions matricielles avant d'être affichées comme images.
11
1.5.3 Définition et résolution
Les images matricielles sont également définies par leur définition et leur résolution.
La définition d'une image est définie par le nombre de points la composant. En image numérique,
cela correspond au nombre de pixels qui composent l'image en hauteur (axe vertical) et en largeur
(axe horizontal) : 200 pixels par 450 pixels par exemple, abrégé en « 200 × 450 ».
La résolution d'une image est définie par un nombre de pixels par unité de longueur de la structure
à numériser (classiquement en ppp). Ce paramètre est défini lors de la numérisation (passage de
l’image sous forme binaire), et dépend principalement des caractéristiques du matériel utilisé lors
de la numérisation. Plus le nombre de pixels par unité de longueur de la structure à numériser est
élevé, plus la quantité d'information qui décrit cette structure est importante et plus la résolution est
élevée. La résolution d'une image numérique définit le degré de détail de l’image. Ainsi, plus la
résolution est élevée, meilleure est la restitution.
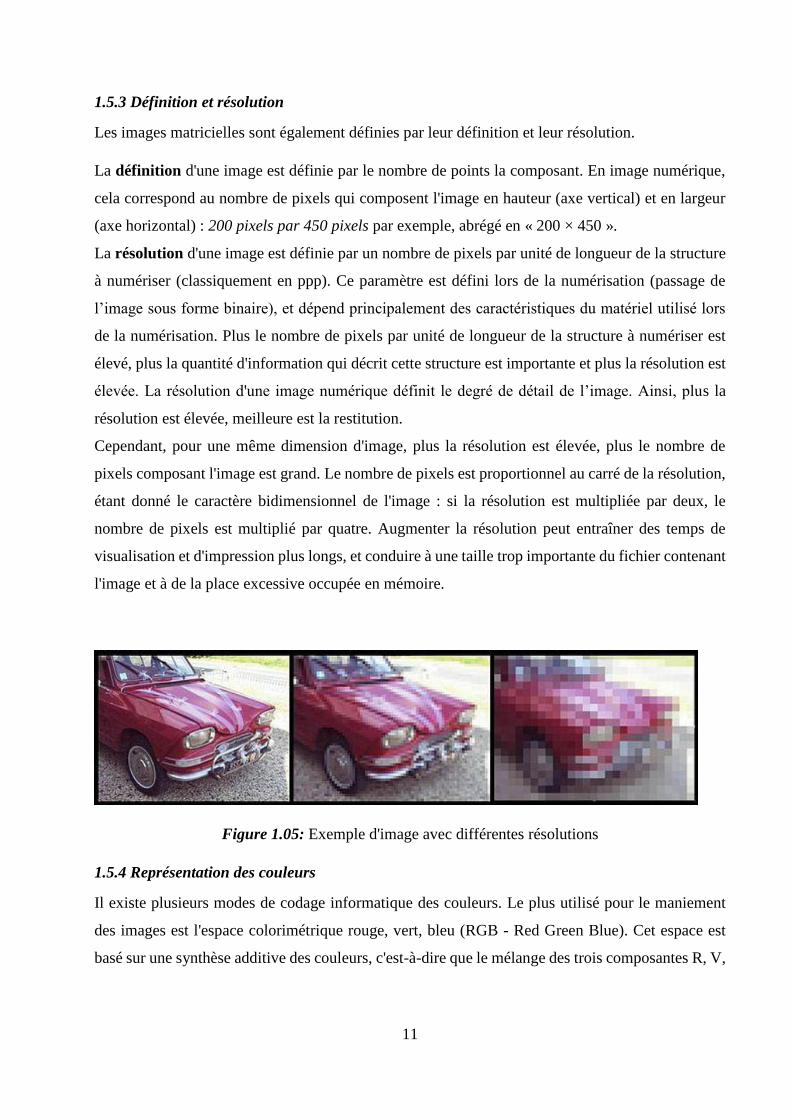
Cependant, pour une même dimension d'image, plus la résolution est élevée, plus le nombre de
pixels composant l'image est grand. Le nombre de pixels est proportionnel au carré de la résolution,
étant donné le caractère bidimensionnel de l'image : si la résolution est multipliée par deux, le
nombre de pixels est multiplié par quatre. Augmenter la résolution peut entraîner des temps de
visualisation et d'impression plus longs, et conduire à une taille trop importante du fichier contenant
l'image et à de la place excessive occupée en mémoire.
Figure 1.05: Exemple d'image avec différentes résolutions
1.5.4 Représentation des couleurs
Il existe plusieurs modes de codage informatique des couleurs. Le plus utilisé pour le maniement
des images est l'espace colorimétrique rouge, vert, bleu (RGB - Red Green Blue). Cet espace est
basé sur une synthèse additive des couleurs, c'est-à-dire que le mélange des trois composantes R, V,
12
et B à leur valeur maximum donne du blanc, à l'instar de la lumière. Le mélange de ces trois couleurs
à des proportions diverses permet de reproduire à l'écran une part importante du spectre visible, sans
avoir à spécifier une multitude de fréquences lumineuses.
Il est à remarquer qu’il existe d'autres modes de représentation des couleurs :
- cyan, magenta, jaune, noir (CMJN) utilisé principalement pour l'impression, et basé sur une
synthèse soustractive des couleurs ;
- teinte, saturation, luminance (TSL), où la couleur est codée suivant le cercle des couleurs ;
- base de couleur optimale YUV, Y représentant la luminance, U et V deux chrominances
orthogonales.
Les images bitmap en couleurs peuvent être représentées soit par une image dans laquelle la valeur
du pixel est une combinaison linéaire des valeurs des trois composantes couleurs, soit par trois
images représentant chacune une composante couleur. Dans le premier cas, selon le nombre de bits
alloués pour le stockage d'une couleur de pixel, on distingue généralement les différents types
d'images suivants :
1.5.4.1 Images 24 bits ou « couleurs vraies »
Il s'agit d'une appellation trompeuse car le monde numérique (fini, limité) ne peut pas rendre compte
intégralement de la réalité (infinie). Le codage de la couleur est réalisé sur trois octets, chaque octet
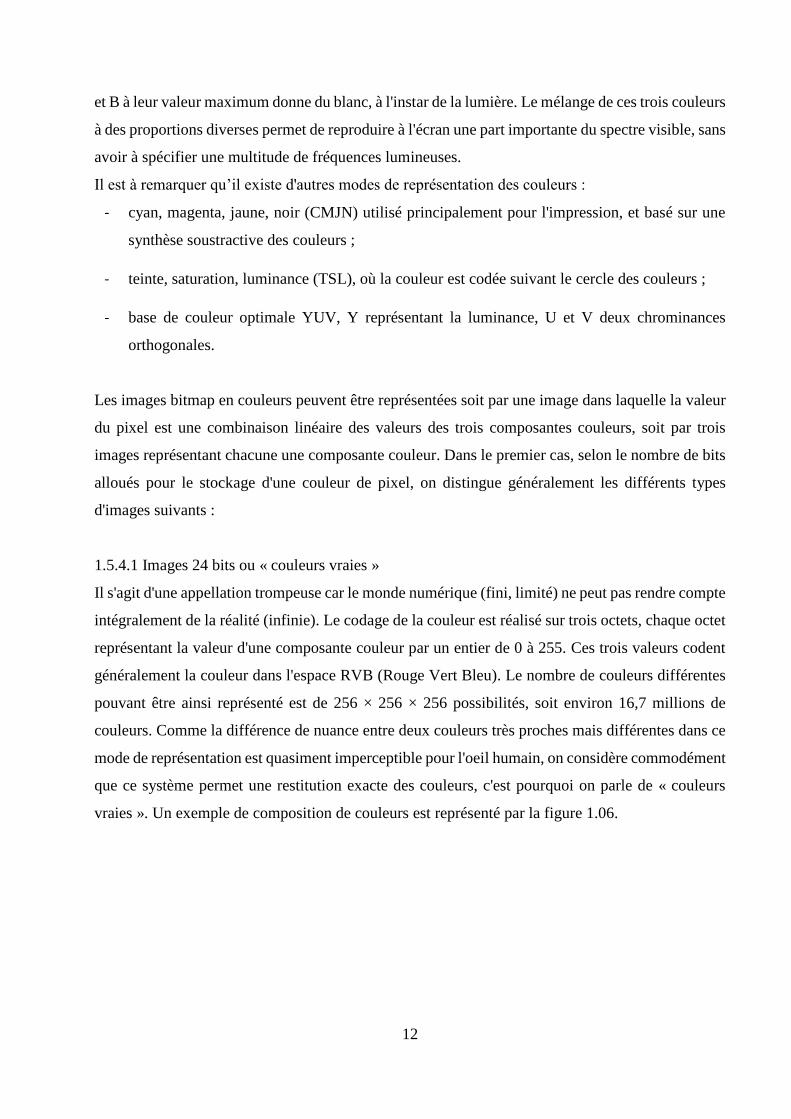
représentant la valeur d'une composante couleur par un entier de 0 à 255. Ces trois valeurs codent
généralement la couleur dans l'espace RVB (Rouge Vert Bleu). Le nombre de couleurs différentes
pouvant être ainsi représenté est de 256 × 256 × 256 possibilités, soit environ 16,7 millions de
couleurs. Comme la différence de nuance entre deux couleurs très proches mais différentes dans ce
mode de représentation est quasiment imperceptible pour l'oeil humain, on considère commodément
que ce système permet une restitution exacte des couleurs, c'est pourquoi on parle de « couleurs
vraies ». Un exemple de composition de couleurs est représenté par la figure 1.06.
13
Figure 1.06: Exemple de composition de couleur RVB
Les images bitmap basées sur cette représentation peuvent rapidement occuper un espace de
stockage considérable, chaque pixel nécessitant trois octets pour coder sa couleur.
1.5.4.2 Images à palettes, images en 256 couleurs (8 bits)
Pour réduire la place occupée par l'information de couleur, on utilise une palette de couleurs «
attachée » à l'image. On parle alors de couleurs indexées : la valeur associée à un pixel ne véhicule
plus la couleur effective du pixel, mais renvoie à l'entrée correspondant à cette valeur dans une table
(ou palette) de couleurs appelée look-up table ou LUT en anglais, dans laquelle on dispose de la
représentation complète de la couleur considérée.
Selon le nombre de couleurs présentes dans l'image, on peut ainsi gagner une place non négligeable:
on considère en pratique que 256 couleurs parmi les 16 millions de couleurs 24 bits sont suffisantes.
Pour les coder, on aura donc une palette occupant 24 bits × 256 entrées, soit 3 × 256 octets, et les
pixels de l'image seront associés à des index codés sur un octet. L'occupation d'une telle image est
donc de 1 octet par pixel plus la LUT, ce qui représente un peu plus du tiers de la place occupée par
14
une image en couleurs 24 bits (plus l'image contient de pixels, plus le gain de place est important,
la limite étant le tiers de la place occupée par l'image en couleurs vraies).
Une autre méthode existante consiste à se passer de palette et de coder directement les trois couleurs
en utilisant un octet : chaque composante couleur est codée sur deux bits, le bit restant peut servir
soit à gérer plus de couleurs sur une des composantes, soit à gérer la transparence du pixel. Avec
cette méthode, on obtient des images bitmap avec un codage couleur effectivement limité à 8 bits,
bien que la plage des couleurs possibles soit très réduite par rapport à celle qu'offre la méthode
utilisant une palette.
Dans le cas des images en couleurs indexées, il est possible de spécifier que les pixels utilisant une
des couleurs de la palette ne soient pas affichés lors de la lecture des données de l'image. Cette
propriété de transparence est très utilisée pour les images des pages web, afin que la couleur de fond
de l'image n'empêche pas la visualisation de l'arrière-plan de la page.
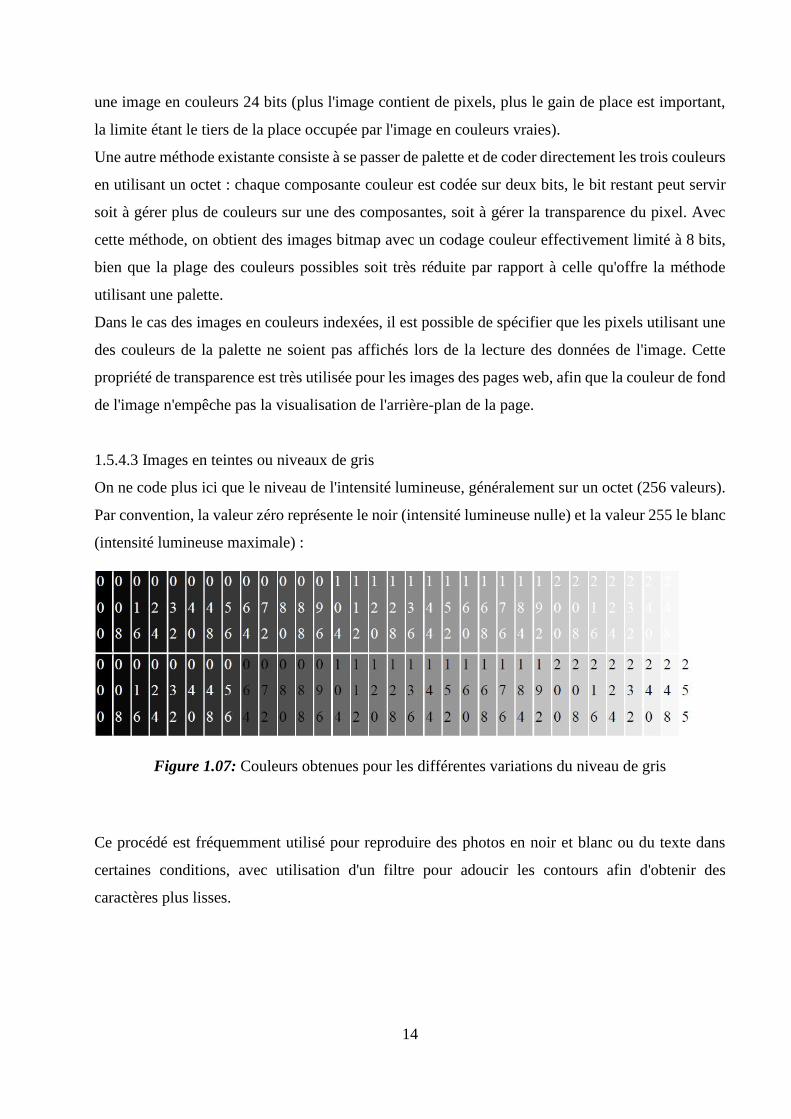
1.5.4.3 Images en teintes ou niveaux de gris
On ne code plus ici que le niveau de l'intensité lumineuse, généralement sur un octet (256 valeurs).
Par convention, la valeur zéro représente le noir (intensité lumineuse nulle) et la valeur 255 le blanc
(intensité lumineuse maximale) :
Figure 1.07: Couleurs obtenues pour les différentes variations du niveau de gris
Ce procédé est fréquemment utilisé pour reproduire des photos en noir et blanc ou du texte dans
certaines conditions, avec utilisation d'un filtre pour adoucir les contours afin d'obtenir des
caractères plus lisses.
15
Ce codage de la simple intensité lumineuse est également utilisé pour le codage d'images couleurs:
l'image est représentée par trois images d'intensité lumineuses, chacune se situant dans une
composante distincte de l'espace colorimétrique.
1.6 La vidéosurveillance et le respect du cadre légal
En premier lieu, un système de vidéosurveillance ne peut être installé avec le seul objectif de
contrôler en permanence l'activité de ses employés. L'employeur doit, en premier lieu, témoigner
d'un intérêt légitime à la mise en place d'un système de surveillance. Il peut s'agir de la nécessité de
protéger des personnes ou des biens, ou de se prémunir contre des risques divers, tels que le vol.
Ensuite, le système doit obligatoirement être proportionné aux regards des intérêts protégés. Ceci
dans le but de protéger le droit de chacun au respect de sa vie privée.
En supplément, d’autres lois doivent être connues afin d’établir un système de vidéosurveillance au
sein d’une entreprise.
1.6.1 Loi Pasqua
Les formalités à remplir et les lois régissant le système de vidéosurveillance dépendent du lieu placé
sous surveillance. Il est alors nécessaire de comprendre la distinction entre un lieu public et un lieu
privé :
- Lieu public ou ouvert au public : tout lieu du secteur public ou du secteur privé où le public peut
accéder.
- Le lieu privé (lieu non ouvert au public) : tout lieu du secteur public ou du secteur privé où le
public ne peut pas accéder.
Les entreprises ouvertes au public telles que les commerces, hôtels, sont concernées par la loi
Pasqua, et doivent déclarer leur installation de vidéosurveillance à leur préfecture. Elles doivent
remplir un formulaire ainsi qu’un dossier détaillant l’installation et ses caractéristiques (type de
caméras, durée d’enregistrement, . . .), les zones filmées et l’accès aux données.
L'entreprise non ouverte au public, étant juridiquement un lieu privé, n'est pas concernée par la Loi
Pasqua du 21 janvier 1995 relative à la vidéosurveillance. Cependant, si le champ des caméras porte
sur une partie de la voie publique, une demande d'autorisation en préfecture est obligatoire.
16
1.6.2 Code du travail
Selon le code du travail, un employeur a le droit de surveiller ses salariés en ayant recours à un
système de vidéosurveillance. Il est à noter que le code du travail prévoit une information
individuelle et collective des salariés sur l'existence d'un traitement contenant des données
personnelles les concernant. L'information doit être diffusée en amont de l'installation du dispositif
et non après son démarrage.
1.7 Conclusion
Ainsi, on peut en conclure que, de nos jours, les systèmes de télésurveillance sont omniprésents et
on les retrouve dans de nombreux secteurs d’activités. Les rapides et prégnantes avancées
technologiques ne cessent d’améliorer les rendements apportés par ces systèmes de sécurisation en
subvenant aux besoins de chaque utilisateur. Selon les critères de chaque utilisateur, elle offre alors
la solution adéquate. Et depuis une cinquantaine d’années, elle fait l’un des grands sujets imbriqués
dans l’esprit des gens. Ceci étant surtout causé du fait que le niveau de sécurisation apporté par le
système de vidéosurveillance atteint actuellement un échelon non négligeable.
17
CHAPITRE 2
SYSTEME DE TRANSMISSION
2.1 Introduction
La transmission de données est le transport d’information, d’un endroit à un autre par des moyens
physiques. L’une des spécificités du projet de ce mémoire concerne justement le fait d’informer
l’utilisateur en cas d’alerte. Cet avertissement de danger se présente, ici, sous la forme d’un message
et d’un appel téléphonique. Dans ce chapitre, nous aborderons alors les différentes techniques et
matériels utilisés pour la mise en œuvre de ce transfert.
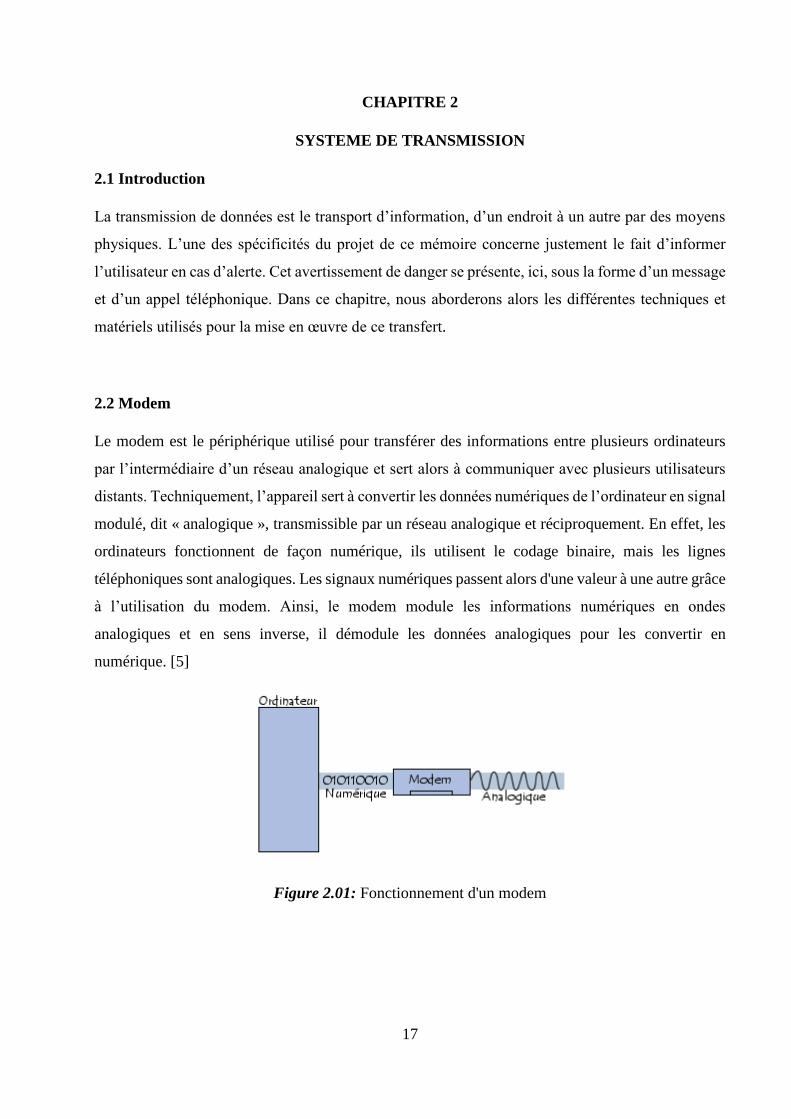
2.2 Modem
Le modem est le périphérique utilisé pour transférer des informations entre plusieurs ordinateurs
par l’intermédiaire d’un réseau analogique et sert alors à communiquer avec plusieurs utilisateurs
distants. Techniquement, l’appareil sert à convertir les données numériques de l’ordinateur en signal
modulé, dit « analogique », transmissible par un réseau analogique et réciproquement. En effet, les
ordinateurs fonctionnent de façon numérique, ils utilisent le codage binaire, mais les lignes
téléphoniques sont analogiques. Les signaux numériques passent alors d'une valeur à une autre grâce
à l’utilisation du modem. Ainsi, le modem module les informations numériques en ondes
analogiques et en sens inverse, il démodule les données analogiques pour les convertir en
numérique. [5]
Figure 2.01: Fonctionnement d'un modem
18
2.2.1 Présentation de la technologie
Le modem est un dispositif électronique, en boîtier indépendant ou en carte à insérer dans un
ordinateur permettant de faire circuler des données numériques sur un canal analogique c’est-à-dire
qu’il réalise la réception et l’envoi de ces données. L’opération de modulation et de démodulation
est effectuée par le modem. Durant l’opération de modulation, on retrouve le codage des données
numériques, la synthèse d’un signal analogique qui est en général une fréquence porteuse modulée.
L’opération de démodulation effectue l’opération inverse et permet au récepteur d’obtenir
l’information numérique. [5]
On parle de modem pour désigner les appareils destinés à faire communiquer des machines
numériques entre elles à travers un réseau analogique.
2.2.2 Signaux de contrôle d’un modem
Les différents signaux échangés entre un ordinateur (DTE, Data Terminal Equipment) et un modem
(DCE, Data Communications Equipment) sont précisés dans la norme RS.232/V.24 :
les données à transmettre arrivent au DCE par la ligne Émission
les données reçues par le DCE apparaissent sur la ligne Réception
DSR (Data Set Ready, modem prêt) est au niveau actif quand le DCE est alimenté et raccordé
à une ligne téléphonique
DTR (Data Terminal Ready, ordinateur prêt) est actif quand le DTE est prêt
RTS (Request To Send, demande d’émission) est activé par le DTE lorsqu’il veut envoyer
des données
CTS (Clear To Send, prêt à émettre) est activé par le DCE lorsqu’il a établi la liaison et est
prêt à recevoir les données à transmettre
CD (Carrier Detect, porteuse détectée) est activé par le DCE lorsqu’il reçoit une porteuse
provenant d’un autre DCE
RI (Ring Indicator, indicateur d’appel) est activé par le DCE lorsqu’il reçoit un signal de
sonnerie
19
2.2.3 Procédure typique d’émission
Cette procédure suit des étapes bien déterminées pour son établissement :
avant de démarrer une transmission de données, l’ordinateur A vérifie que le modem A est
sous tension en vérifiant le niveau de DSR
l’ordinateur A donne l’ordre au modem A de former le numéro de téléphone
le modem appelé, que nous nommerons B, détecte la sonnerie et prévient l’ordinateur B
auquel il est raccordé en activant sa ligne RI
quand l’ordinateur B est prêt à recevoir les données, il active sa ligne RTS
le modem B active alors sa porteuse
le modem A détecte la porteuse et prévient l’ordinateur A en activant CD
l’ordinateur A active RTS pour demander s’il peut commencer la transmission
le modem A répond en activant CTS, et la transmission des données peut commencer
2.3 Universal Serial Bus ou USB
Le Universal Serial Bus est une norme relative à un bus informatique en transmission série qui sert
à connecter des périphériques informatiques à un ordinateur ou à tout type d'appareil prévu à cet
effet. Ce bus permet alors de connecter des périphériques à chaud tout en bénéficiant du Plug and
Play qui reconnaît automatiquement le périphérique et il permet aussi d’alimenter les périphériques
peu gourmands en énergie.
2.3.1 Evolution de la norme USB
L’USB a été conçu au milieu des années 1990 afin de remplacer les nombreux ports externes
d’ordinateurs. Suivant les avancées technologiques, de nombreuses normes ont vu le jour, chacune
étant destinée à remplacer la précédente car plus performante. [6]
20
2.3.1.1 USB 1.0 et USB 1.1
La première version de la norme ou USB 1.0 est née en 1996 mais elle reste théorique et n’a pas
vraiment été utilisée par manque de composants.
L’arrivée de la seconde version intitulée USB 1.1 en 1998 a marqué l’utilisation concrète de l’USB.
Cette nouvelle version apporte des corrections à la norme 1.0 et définit deux vitesses de
communication :
le mode lent (Low Speed) a un débit de 1,5 Mbit/s. Il permet de connecter des périphériques
qui ont besoin de transférer peu de données, comme les claviers et souris ;
le mode pleine vitesse (Full Speed) débite à 12 Mbit/s. Il est utilisé pour connecter des
imprimantes, scanners, disques durs, graveurs de CD et autres périphériques ayant besoin de
plus de rapidité.
2.3.1.2 USB 2.0
En avril 2000, la norme USB 2.0 a été publiée. Elle optimise la bande passante et offre un débit
théorique de 480 Mbit/s. Cette norme est utilisée par les périphériques rapides tels que les disques
durs et les graveurs. Au moment de sa sortie, la plupart des périphériques ont d'ailleurs une vitesse
inférieure à celle permise par l'USB 2.0.
2.3.1.3 USB 3.0
En 2008, l’USB 3.0 introduit un débit théorique égal à 5 Gbit/s. Avec cette norme, les nouveaux
périphériques disposent de connexions à 6 contacts au lieu de 4, mais la compatibilité ascendante
des prises et câbles avec les versions précédentes est assurée. En revanche, la compatibilité
descendante est impossible.
21
2.3.1.4 USB 3.1
Ce standard débite théoriquement à 10 Gbit/s et a été annoncé en août 2013. L'USB 3.1 permet des
débits doubles par rapport à ceux de l'USB 3.0, soit 10 Gbit/s. Cette nouvelle norme est rétro
compatible avec l'USB 3.0 et l'USB 2.0.
2.3.2 Fonctionnement du bus USB
L'architecture USB a pour caractéristique de fournir l'alimentation électrique aux périphériques
qu'elle relie, dans la limite de 15 W maximum par périphérique. Elle utilise pour cela un câble
composé de quatre fils (la masse GND, l'alimentation VBUS et deux fils de données appelés D- et
D+).
Figure 2.02: Schéma global des broches du connecteur
La communication entre l'hôte représenté par l'ordinateur et les périphériques se fait selon un
protocole basé sur le principe de l'anneau à jeton connu sous le nom de Token Ring. Cela signifie
que la bande passante est partagée temporellement entre tous les périphériques connectés. L'hôte
émet un signal de début de séquence chaque milliseconde, intervalle de temps pendant lequel il va
donner simultanément la « parole » à chacun d'entre eux. Lorsque l'hôte désire communiquer avec
un périphérique, il émet un jeton désignant un périphérique, c'est donc l'hôte qui décide du
« dialogue » avec les périphériques. Si le périphérique reconnaît son adresse dans le jeton, il envoie
un paquet de données en réponse, sinon il fait suivre le paquet aux autres périphériques connectés.
Le jeton en question est un paquet de données, contenant l'adresse du périphérique, codé sur 7 bits.
Et puisque l'adresse est codée sur 7 bits, 128 périphériques peuvent être connectés simultanément à
22
un port de ce type. Mais il convient en réalité de ramener ce chiffre à 127 car l'adresse 0 est une
adresse réservée. En effet, cette adresse correspond à l’adresse par défaut attribuée à un périphérique
au moment de sa connexion au port.
Les ports USB supportent le Hot plug and play. Ainsi, les périphériques peuvent être branchés sans
éteindre l'ordinateur. Lors de la connexion du périphérique à l'hôte, ce dernier détecte l'ajout du
nouvel élément grâce au changement de la tension entre les fils D+ et D-. A ce moment, l'ordinateur
envoie un signal d'initialisation au périphérique pendant 10 ms, puis lui fournit du courant grâce aux
fils GND et VBUS. Le périphérique est alors alimenté en courant électrique et récupère
temporairement l'adresse par défaut c’est-à-dire l'adresse 0. L'étape suivante, appelée aussi
procédure d'énumération, consiste à lui fournir son adresse définitive. Pour cela, l'ordinateur
interroge les périphériques déjà branchés pour connaître la leur et en attribue une au nouveau, qui
en retour s'identifie. L'hôte, disposant de toutes les caractéristiques nécessaires est alors en mesure
de charger le pilote approprié. [7]
2.4 Bluetooth
2.4.1 Définition
Bluetooth est une technologie de réseau personnel sans fil permettant l'échange bidirectionnel de
données à très courte distance. Cette technologie est utilisée pour relier des appareils entre eux sans
liaison filaire. Les appareils Bluetooth ne nécessitent pas d’une ligne de vue directe pour
communiquer. Cette caractéristique rend plus souple son utilisation et permet notamment une
communication d'une pièce à une autre, sur de petits espaces. [8]
2.4.2 Objectif
L'objectif de Bluetooth est de permettre de transmettre des données ou de la voix entre des
équipements possédant un circuit radio de faible coût, sur un rayon de l'ordre d'une dizaine de mètres
à un peu moins d'une centaine de mètres et avec une faible consommation électrique.
23
Ainsi, la technologie Bluetooth est principalement prévue pour relier entre eux des périphériques,
des ordinateurs ou des assistants personnels (PDA), sans utiliser de liaison filaire. [8] La technologie
Bluetooth est également de plus en plus utilisée dans les téléphones portables, afin de leur permettre
de communiquer avec des ordinateurs ou des assistants personnels.
2.4.3 Caractéristiques
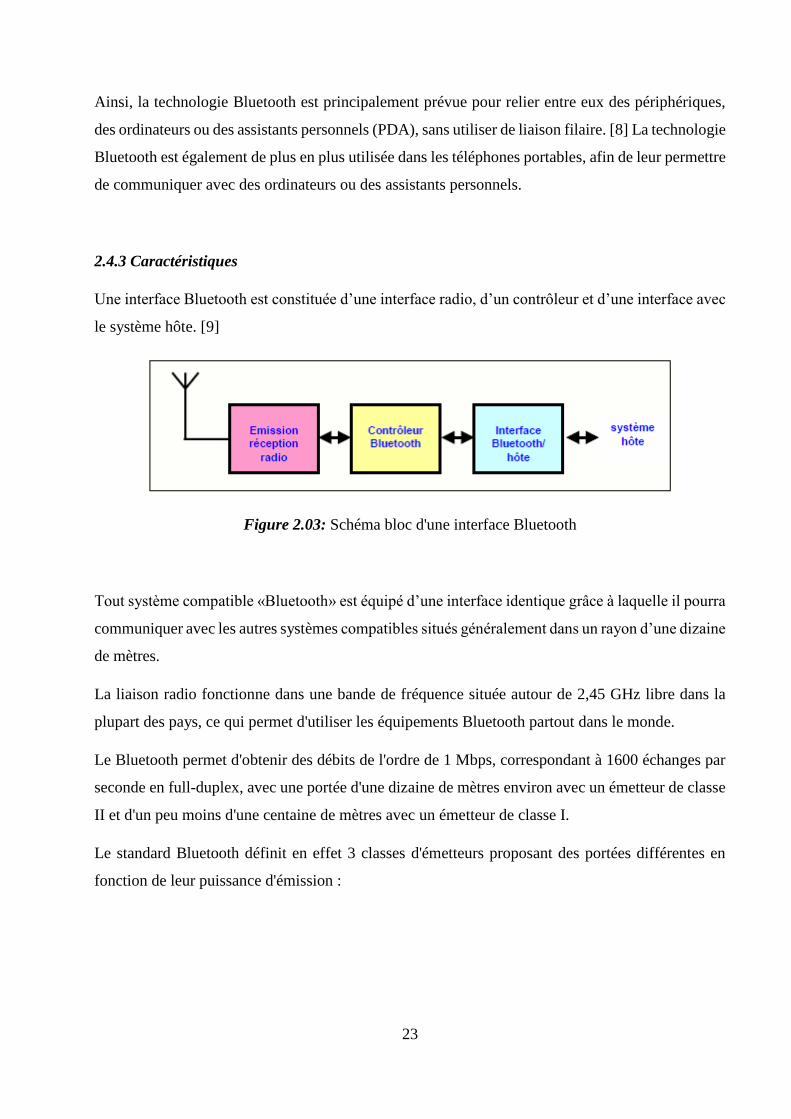
Une interface Bluetooth est constituée d’une interface radio, d’un contrôleur et d’une interface avec
le système hôte. [9]
Figure 2.03: Schéma bloc d'une interface Bluetooth
Tout système compatible «Bluetooth» est équipé d’une interface identique grâce à laquelle il pourra
communiquer avec les autres systèmes compatibles situés généralement dans un rayon d’une dizaine
de mètres.
La liaison radio fonctionne dans une bande de fréquence située autour de 2,45 GHz libre dans la
plupart des pays, ce qui permet d'utiliser les équipements Bluetooth partout dans le monde.
Le Bluetooth permet d'obtenir des débits de l'ordre de 1 Mbps, correspondant à 1600 échanges par
seconde en full-duplex, avec une portée d'une dizaine de mètres environ avec un émetteur de classe
II et d'un peu moins d'une centaine de mètres avec un émetteur de classe I.
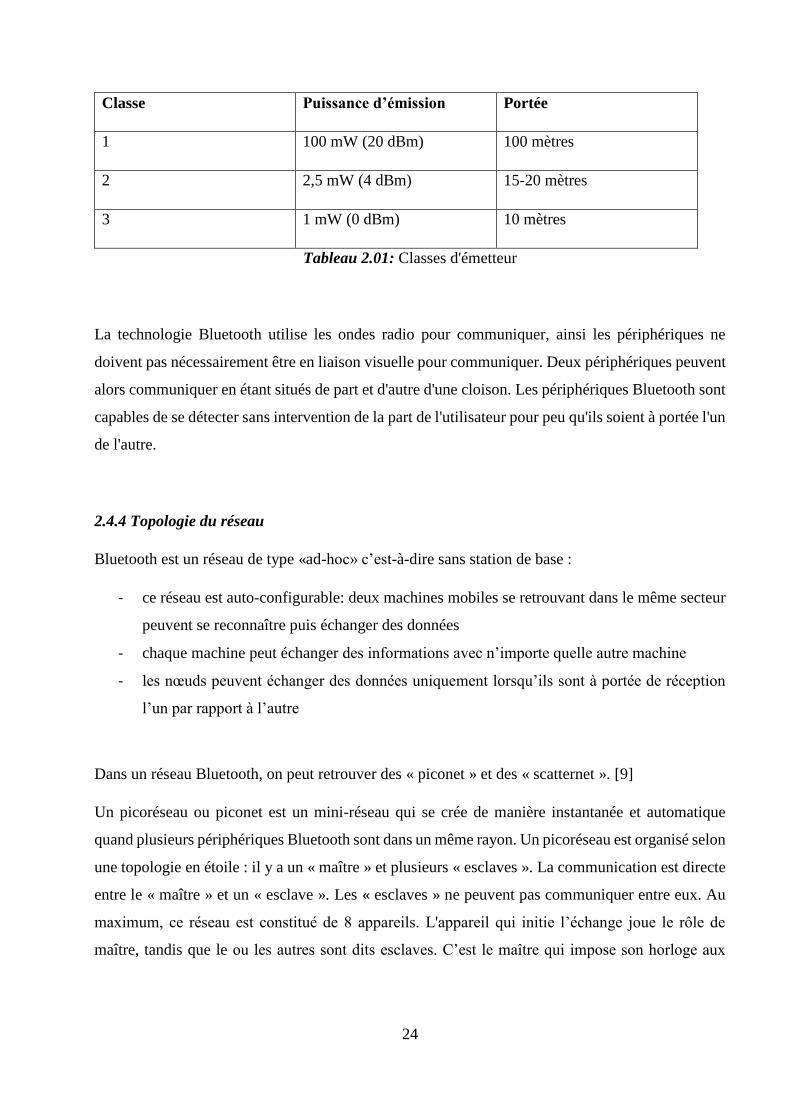
Le standard Bluetooth définit en effet 3 classes d'émetteurs proposant des portées différentes en
fonction de leur puissance d'émission :
24
Classe Puissance d’émission Portée
1 100 mW (20 dBm) 100 mètres
2 2,5 mW (4 dBm) 15-20 mètres
3 1 mW (0 dBm) 10 mètres
Tableau 2.01: Classes d'émetteur
La technologie Bluetooth utilise les ondes radio pour communiquer, ainsi les périphériques ne
doivent pas nécessairement être en liaison visuelle pour communiquer. Deux périphériques peuvent
alors communiquer en étant situés de part et d'autre d'une cloison. Les périphériques Bluetooth sont
capables de se détecter sans intervention de la part de l'utilisateur pour peu qu'ils soient à portée l'un
de l'autre.
2.4.4 Topologie du réseau
Bluetooth est un réseau de type «ad-hoc» c’est-à-dire sans station de base :
- ce réseau est auto-configurable: deux machines mobiles se retrouvant dans le même secteur
peuvent se reconnaître puis échanger des données
- chaque machine peut échanger des informations avec n’importe quelle autre machine
- les nœuds peuvent échanger des données uniquement lorsqu’ils sont à portée de réception
l’un par rapport à l’autre
Dans un réseau Bluetooth, on peut retrouver des « piconet » et des « scatternet ». [9]
Un picoréseau ou piconet est un mini-réseau qui se crée de manière instantanée et automatique
quand plusieurs périphériques Bluetooth sont dans un même rayon. Un picoréseau est organisé selon
une topologie en étoile : il y a un « maître » et plusieurs « esclaves ». La communication est directe
entre le « maître » et un « esclave ». Les « esclaves » ne peuvent pas communiquer entre eux. Au
maximum, ce réseau est constitué de 8 appareils. L'appareil qui initie l’échange joue le rôle de
maître, tandis que le ou les autres sont dits esclaves. C’est le maître qui impose son horloge aux

25
esclaves (synchronisation) et les fréquences de travail. Les appareils ne faisant pas partie du piconet
sont en mode «stand-by» ou «park».
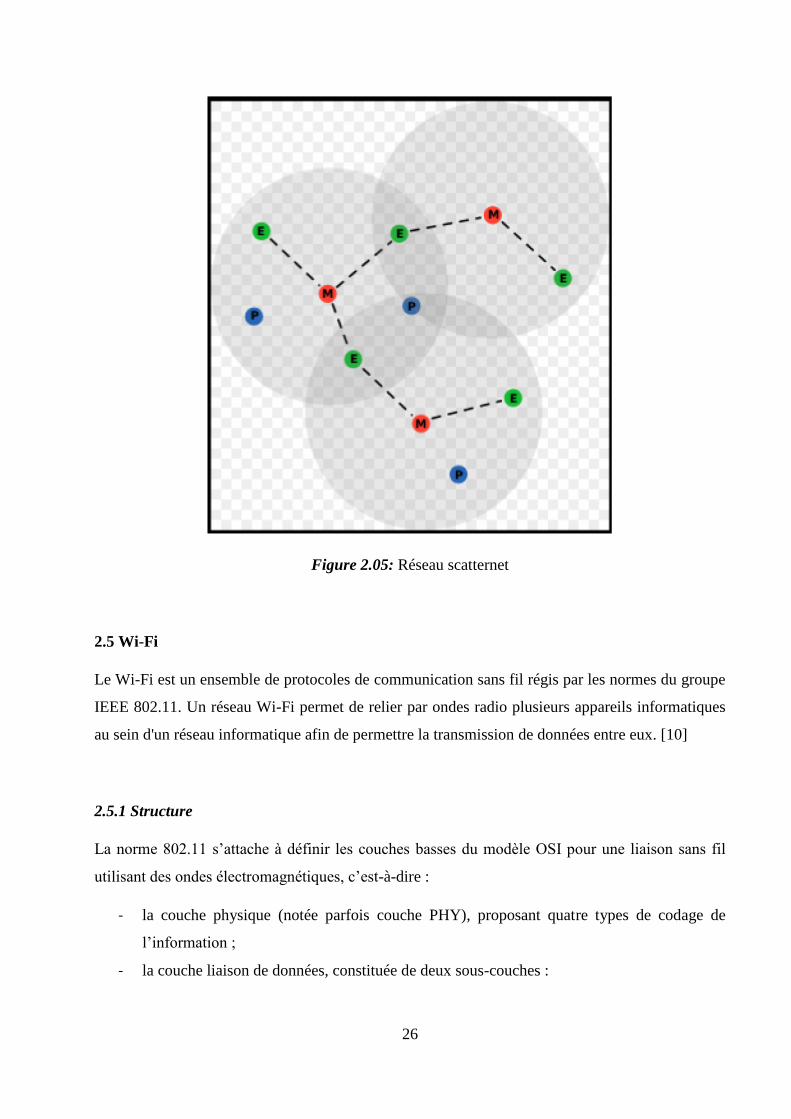
Les différents piconets peuvent être interconnectés pour former un réseau de diffusion ou scatternet
mais ce réseau est limité à 10 piconets au maximum.
Les figures 2.04 et 2.05 illustrent ces deux types de réseau :
Figure 2.04: Réseau piconet
26
Figure 2.05: Réseau scatternet
2.5 Wi-Fi
Le Wi-Fi est un ensemble de protocoles de communication sans fil régis par les normes du groupe
IEEE 802.11. Un réseau Wi-Fi permet de relier par ondes radio plusieurs appareils informatiques
au sein d'un réseau informatique afin de permettre la transmission de données entre eux. [10]
2.5.1 Structure
La norme 802.11 s’attache à définir les couches basses du modèle OSI pour une liaison sans fil
utilisant des ondes électromagnétiques, c’est-à-dire :
- la couche physique (notée parfois couche PHY), proposant quatre types de codage de
l’information ;
- la couche liaison de données, constituée de deux sous-couches :
27
o le contrôle de la liaison logique (Logical Link Control, ou LLC) ;
o le contrôle d’accès au support (Media Access Control, ou MAC).
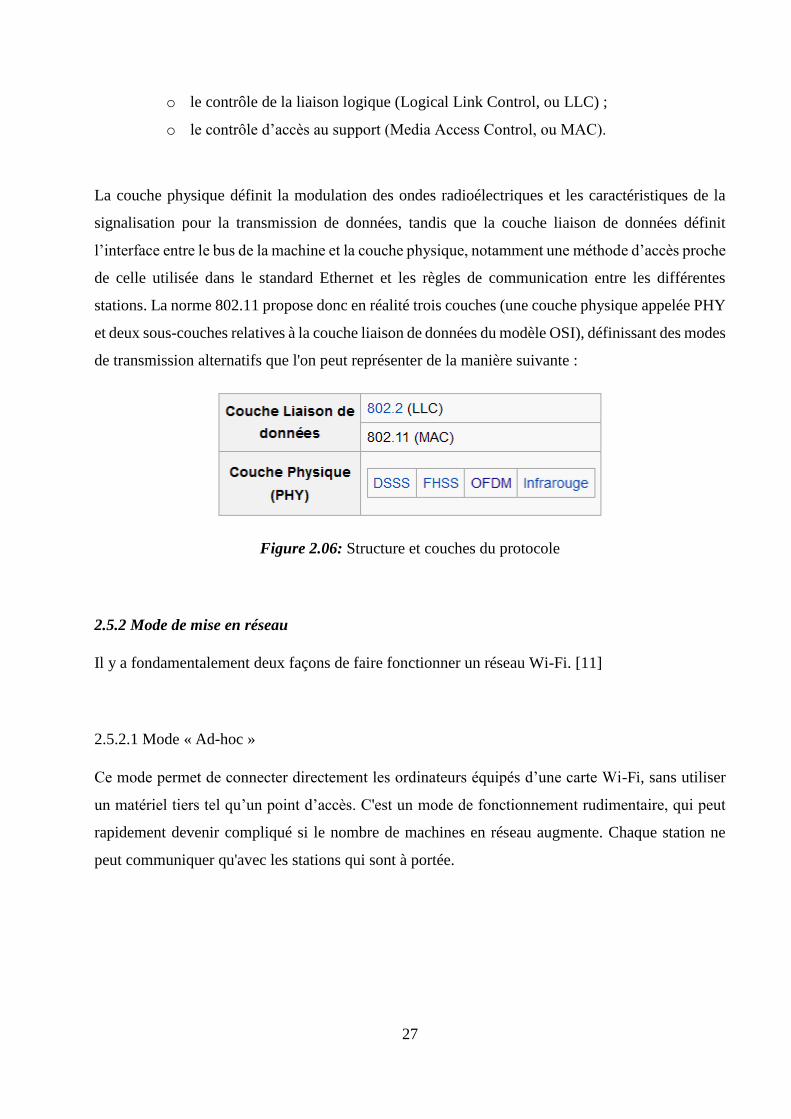
La couche physique définit la modulation des ondes radioélectriques et les caractéristiques de la
signalisation pour la transmission de données, tandis que la couche liaison de données définit
l’interface entre le bus de la machine et la couche physique, notamment une méthode d’accès proche
de celle utilisée dans le standard Ethernet et les règles de communication entre les différentes
stations. La norme 802.11 propose donc en réalité trois couches (une couche physique appelée PHY
et deux sous-couches relatives à la couche liaison de données du modèle OSI), définissant des modes
de transmission alternatifs que l'on peut représenter de la manière suivante :
Figure 2.06: Structure et couches du protocole
2.5.2 Mode de mise en réseau
Il y a fondamentalement deux façons de faire fonctionner un réseau Wi-Fi. [11]
2.5.2.1 Mode « Ad-hoc »
Ce mode permet de connecter directement les ordinateurs équipés d’une carte Wi-Fi, sans utiliser
un matériel tiers tel qu’un point d’accès. C'est un mode de fonctionnement rudimentaire, qui peut
rapidement devenir compliqué si le nombre de machines en réseau augmente. Chaque station ne
peut communiquer qu'avec les stations qui sont à portée.
28
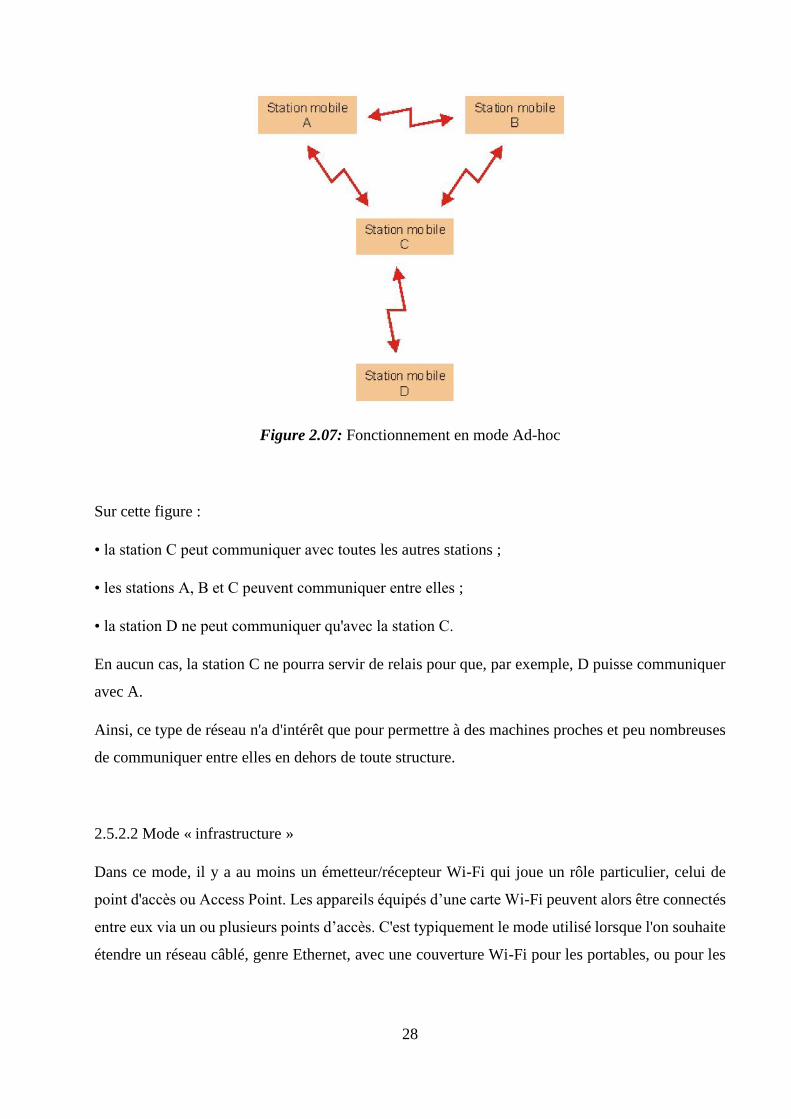
Figure 2.07: Fonctionnement en mode Ad-hoc
Sur cette figure :
• la station C peut communiquer avec toutes les autres stations ;
• les stations A, B et C peuvent communiquer entre elles ;
• la station D ne peut communiquer qu'avec la station C.
En aucun cas, la station C ne pourra servir de relais pour que, par exemple, D puisse communiquer
avec A.
Ainsi, ce type de réseau n'a d'intérêt que pour permettre à des machines proches et peu nombreuses
de communiquer entre elles en dehors de toute structure.
2.5.2.2 Mode « infrastructure »
Dans ce mode, il y a au moins un émetteur/récepteur Wi-Fi qui joue un rôle particulier, celui de
point d'accès ou Access Point. Les appareils équipés d’une carte Wi-Fi peuvent alors être connectés
entre eux via un ou plusieurs points d’accès. C'est typiquement le mode utilisé lorsque l'on souhaite
étendre un réseau câblé, genre Ethernet, avec une couverture Wi-Fi pour les portables, ou pour les
29
machines que l'on ne souhaite pas câbler. La mise en place d’un tel réseau oblige de poser des bornes
« Point d’accès » dans la zone qui doit être couverte par le réseau. Les bornes, ainsi que les machines,
doivent être configurées avec le même nom de réseau afin de pouvoir communiquer.
L’avantage de ce mode est de garantir un passage obligé par le Point d’accès. Il est donc possible
de vérifier qui accède au réseau.
2.6 Le réseau GSM
Le GSM ou Global System for Mobile Communications (GSM) est une norme numérique de
seconde génération pour la téléphonie mobile. Ce réseau est idéal pour les communications de type
« voix ».
2.6.1 Architecture réseau
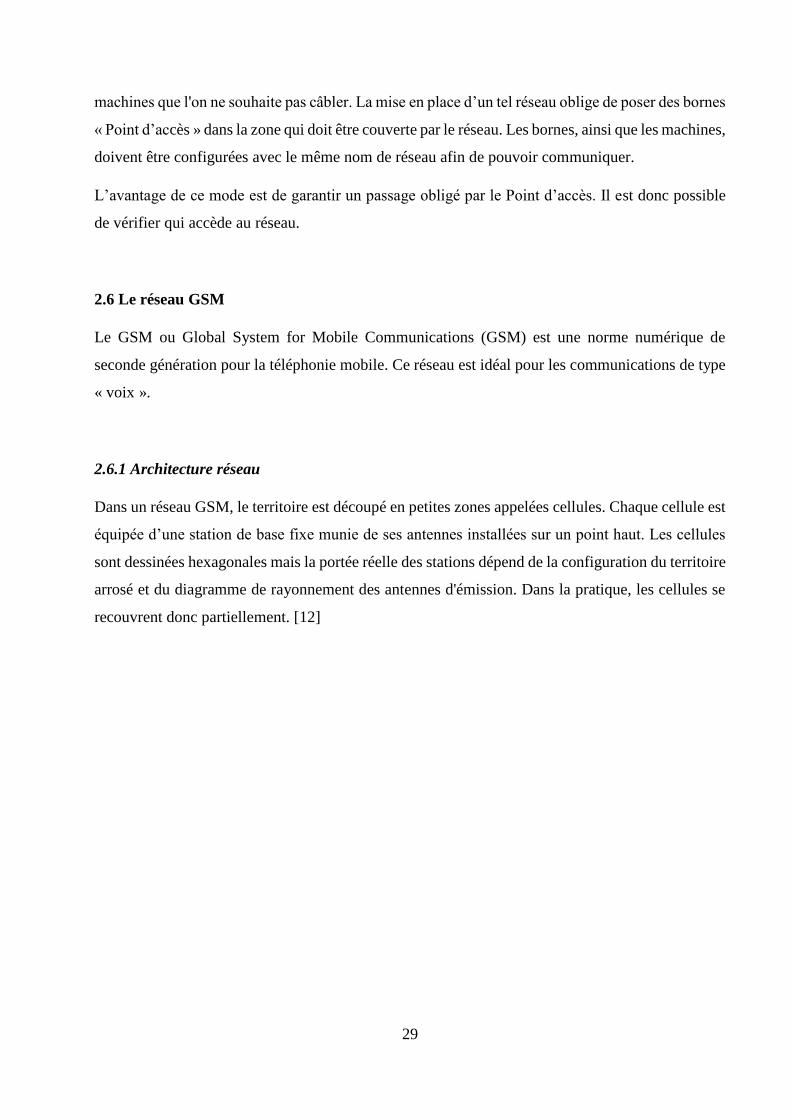
Dans un réseau GSM, le territoire est découpé en petites zones appelées cellules. Chaque cellule est
équipée d’une station de base fixe munie de ses antennes installées sur un point haut. Les cellules
sont dessinées hexagonales mais la portée réelle des stations dépend de la configuration du territoire
arrosé et du diagramme de rayonnement des antennes d'émission. Dans la pratique, les cellules se
recouvrent donc partiellement. [12]
30
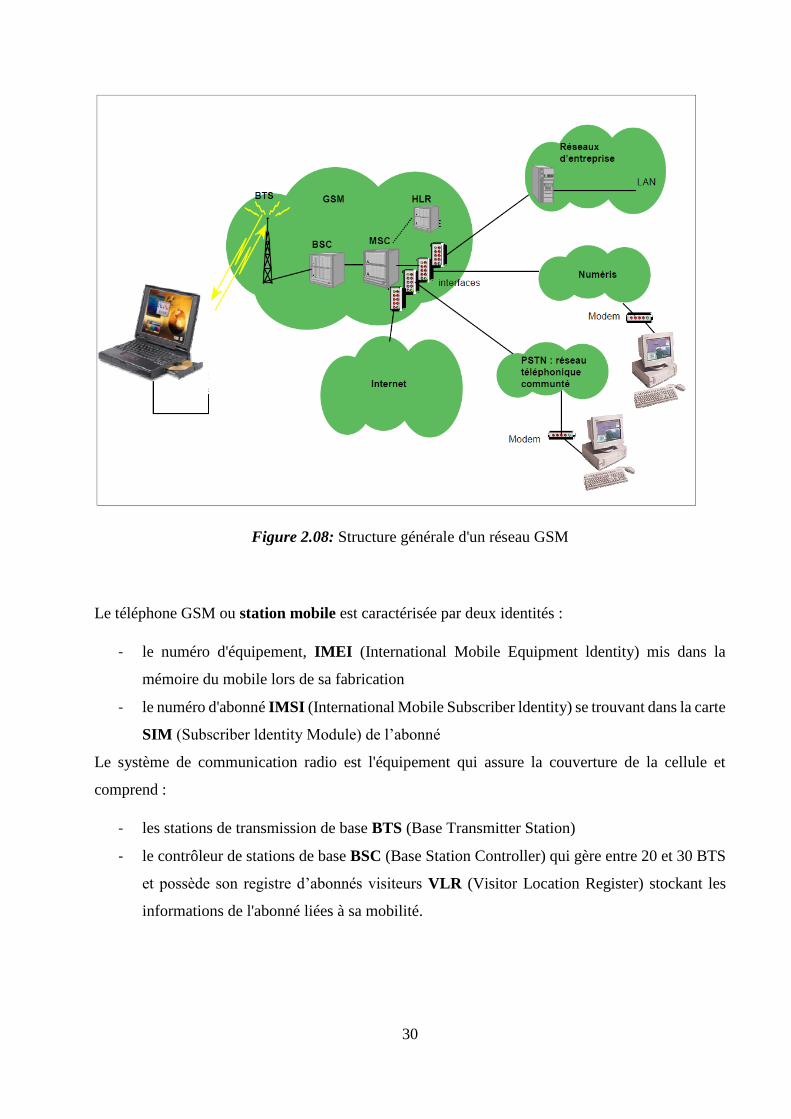
Figure 2.08: Structure générale d'un réseau GSM
Le téléphone GSM ou station mobile est caractérisée par deux identités :
- le numéro d'équipement, IMEI (International Mobile Equipment ldentity) mis dans la
mémoire du mobile lors de sa fabrication
- le numéro d'abonné IMSI (International Mobile Subscriber ldentity) se trouvant dans la carte
SIM (Subscriber ldentity Module) de l’abonné
Le système de communication radio est l'équipement qui assure la couverture de la cellule et
comprend :
- les stations de transmission de base BTS (Base Transmitter Station)
- le contrôleur de stations de base BSC (Base Station Controller) qui gère entre 20 et 30 BTS
et possède son registre d’abonnés visiteurs VLR (Visitor Location Register) stockant les
informations de l'abonné liées à sa mobilité.
31
Le commutateur de services mobiles MSC est un autocommutateur qui assure les fonctions de
commutation nécessaires en aiguillant les conversations vers la MSC du correspondant ou vers
d’autres réseaux (téléphonique, Internet, Numéris …) à travers des interfaces appropriées.
Le registre des abonnés nominaux ou HLR (Home Local Register) est une base de données utilisée
pour la gestion des abonnés mobiles et contenant deux types d'informations :
- les informations d'abonnés, le numéro d'abonné (IMSI)
- les informations sur la localisation de l'abonné, permettant aux appels entrant dans le réseau
d'être acheminés jusqu'à ce mobile
2.6.1.1 Le centre de commutation mobile (MSC)
Le centre de commutation mobile est relié au sous-système radio via l'interface A. Son rôle principal
est d'assurer la commutation entre les abonnés du réseau mobile et ceux du réseau commuté public
(RTC) ou de son équivalent numérique, le réseau RNIS (Réseau Numérique à Intégration de
Service). D'un point de vue fonctionnel, il est semblable à un commutateur de réseau RNIS, mis à
part quelques modifications nécessaires pour un réseau mobile.
De plus, il participe à la fourniture des différents services aux abonnés tels que la téléphonie, les
services supplémentaires et les services de messagerie. Il permet encore de mettre à jour les
différentes bases de données (HLR et VLR) qui donnent toutes les informations concernant les
abonnés et leur localisation dans le réseau.
Les commutateurs MSC d'un opérateur sont reliés entre eux pour la commutation interne des
informations. Des MSC servant de passerelle (Gateway Mobile Switching Center, GMSC) sont
placées en périphérie du réseau d'un opérateur de manière à assurer une inter-opérabilité entre
réseaux d'opérateurs.
32
2.6.1.2 L'enregistreur de localisation nominale (HLR)
Il existe au moins un enregistreur de localisation (HLR) par réseau. Il s'agit d'une base de données
avec des informations essentielles pour les services de téléphonie mobile et avec un accès rapide de
manière à garantir un temps d'établissement de connexion aussi court que possible.
Le HLR contient:
toutes les informations relatives aux abonnés: le type d'abonnement, la clé d'authentification
Ki qui est connue d'un seul HLR et d'une seule carte SIM, les services souscrits, le numéro
de l'abonné (IMSI).
ainsi qu'un certain nombre de données dynamiques telles que la position de l'abonné dans le
réseau, l'état de son terminal (allumé, éteint, en communication, libre, ...).
Les données dynamiques sont mises à jour par le MSC. Cette base de données est souvent unique
pour un réseau GSM et seules quelques personnes y ont accès directement.
2.6.1.3 Le centre d'authentification (AuC).
Lorsqu'un abonné passe une communication, l'opérateur doit pouvoir s'assurer qu'il ne s'agit pas
d'un usurpateur. Le centre d'authentification remplit cette fonction de protection des
communications. Pour ce faire, les normes GSM prévoient deux mécanismes:
- Le chiffrement des transmissions radio.
- L'authentification des utilisateurs du réseau au moyen d'une clé Ki, qui est à la fois présente
dans la station mobile et dans le centre d'authentification.
Grâce à ce mécanisme d'authentification, un VLR peut accueillir un mobile appartenant à
un autre réseau sans qu'il ne soit nécessaire de divulguer la clé de chiffrement du mobile.
On peut dès lors distinguer trois niveaux de protection:
- La carte SIM qui interdit à un utilisateur non enregistré d'avoir accès au réseau.
- Le chiffrement des communications destiné à empêcher l'écoute de celles-ci.
- La protection de l'identité de l'abonné.
33
2.6.1.4 L'enregistreur de localisation des visiteurs (VLR)
Cette base de données ne contient que des informations dynamiques et est liée à un MSC. Il y en a
donc plusieurs dans un réseau GSM. Elle contient des données dynamiques qui lui sont transmises
par le HLR avec lequel elle communique lorsqu'un abonné entre dans la zone de couverture du
centre de commutation mobile auquel elle est rattachée. Lorsque l'abonné quitte cette zone de
couverture, ses données sont transmises à un autre VLR; les données suivent donc l'abonné en
quelque sorte.
2.6.1.5 L'enregistreur des identités des équipements (EIR)
Malgré les mécanismes introduits pour sécuriser l'accès au réseau et le contenu des communications,
le téléphone mobile doit potentiellement pouvoir accueillir n'importe quelle carte SIM de n'importe
quel réseau. Il est donc imaginable qu'un terminal puisse être utilisé par un voleur sans qu'il ne
puisse être repéré.
Pour combattre ce risque, chaque terminal reçoit un identifiant unique (International Mobile station
Equipment Identity, IMEI) qui ne peut pas être modifié sans altérer le terminal. En fonction de
données au sujet d'un terminal, un opérateur peut décider de refuser l'accès au réseau. Tous les
opérateurs n'implémentent pas une telle base de données.
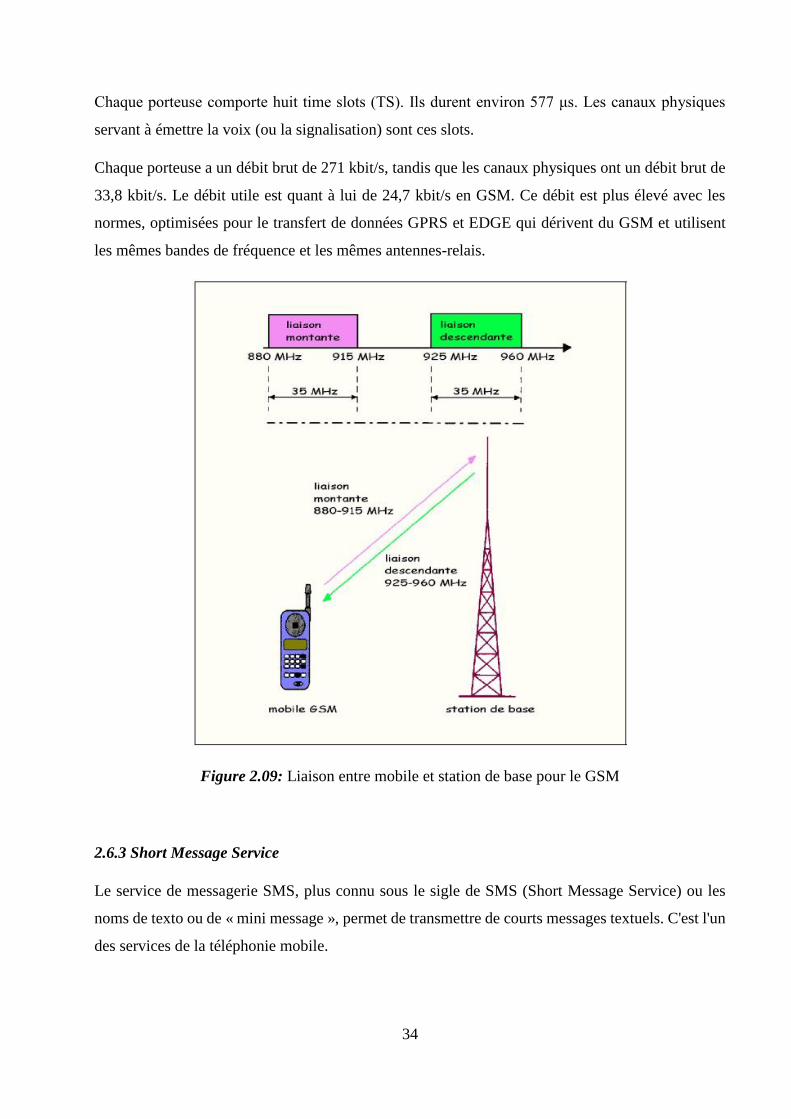
2.6.2 Caractéristiques de l’interface radio du réseau GSM
Le GSM utilise deux bandes de fréquences, l'une pour la voie montante, l'autre pour la voie
descendante auxquelles s'intègrent des canaux de signalisation ; la puissance du signal est modulée
selon la distance entre l'antenne et le GSM considéré, ce qui permet d'avoir une estimation de la
distance entre un utilisateur et l'antenne.
La bande 880-915 MHz est utilisée en Europe, pour la voie montante, tandis que la bande 925-960
MHz est utilisée pour la voie descendante. Chacune de ces bandes comprend 175 porteuses (canaux)
de 200 kHz chacune.
34
Chaque porteuse comporte huit time slots (TS). Ils durent environ 577 μs. Les canaux physiques
servant à émettre la voix (ou la signalisation) sont ces slots.
Chaque porteuse a un débit brut de 271 kbit/s, tandis que les canaux physiques ont un débit brut de
33,8 kbit/s. Le débit utile est quant à lui de 24,7 kbit/s en GSM. Ce débit est plus élevé avec les
normes, optimisées pour le transfert de données GPRS et EDGE qui dérivent du GSM et utilisent
les mêmes bandes de fréquence et les mêmes antennes-relais.
Figure 2.09: Liaison entre mobile et station de base pour le GSM
2.6.3 Short Message Service
Le service de messagerie SMS, plus connu sous le sigle de SMS (Short Message Service) ou les
noms de texto ou de « mini message », permet de transmettre de courts messages textuels. C'est l'un
des services de la téléphonie mobile.
35
2.6.3.1 Classes de SMS
Un SMS reçu sur le mobile est traité de manière différente suivant sa classe. [14]
classe 0 : les SMS de cette classe sont connus comme étant un « flash SMS ». Le message
est directement affiché à l’utilisateur sur l’écran du mobile à la réception. Un rapport est
envoyé ensuite au centre de service. Le message n’est enregistré ni dans la mémoire du
téléphone ni dans la carte SIM. Il est effacé dès que l’utilisateur a validé la visualisation.
classe 1 : le message est enregistré dans la mémoire du téléphone et si cette mémoire est
pleine, dans la carte SIM par défaut.
classe 2 : le message est enregistré sur la carte USIM. Un accusé de réception est envoyé au
centre de service une fois que le message a bien été transféré sur l’USIM.
classe 3 : le message est transféré sur un équipement externe connecté au mobile tel qu’un
ordinateur portable.
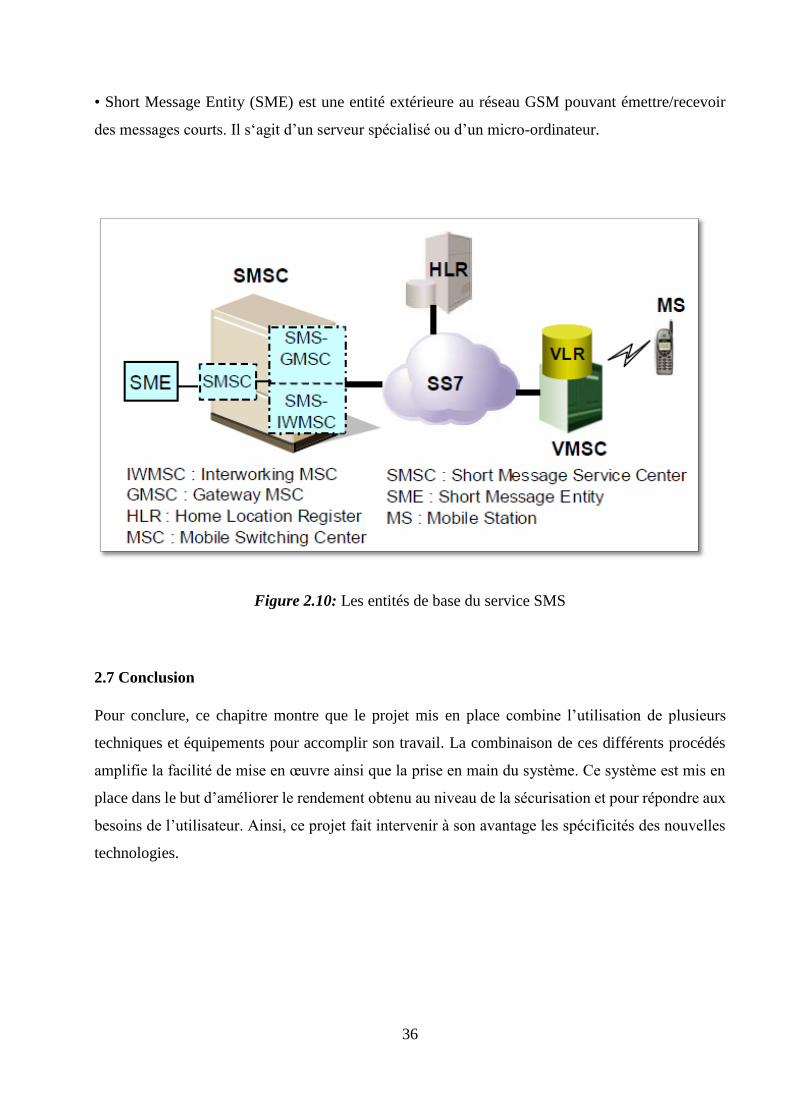
2.6.3.2 Architecture du service SMS point à point
L’architecture de ce service est constituée des entités suivantes :
• Gateway MSC For Short Message Service (SMS-GMSC) : Il s’agit d’une fonction capable d’une
part de recevoir un message court d’une entité SMSC et d’interroger le HLR afin de déterminer la
localisation de la station mobile destinataire et d’autre part de délivrer le message court au MSC
auquel est rattachée cette station mobile destinataire.
Ce MSC de rattachement est aussi appelé VMSC (Visited MSC).
• Interworking MSC For Short Message Service (SMS-IWMSC) : Il s’agit d’une fonction capable
de recevoir un message court d’un MSC et de le soumettre à un SMSC.
• Short Message Service Center (SMSC) : Cette fonction est responsable du stockage/relayage d’un
message court.
36
• Short Message Entity (SME) est une entité extérieure au réseau GSM pouvant émettre/recevoir
des messages courts. Il s‘agit d’un serveur spécialisé ou d’un micro-ordinateur.
Figure 2.10: Les entités de base du service SMS
2.7 Conclusion
Pour conclure, ce chapitre montre que le projet mis en place combine l’utilisation de plusieurs
techniques et équipements pour accomplir son travail. La combinaison de ces différents procédés
amplifie la facilité de mise en œuvre ainsi que la prise en main du système. Ce système est mis en
place dans le but d’améliorer le rendement obtenu au niveau de la sécurisation et pour répondre aux
besoins de l’utilisateur. Ainsi, ce projet fait intervenir à son avantage les spécificités des nouvelles
technologies.
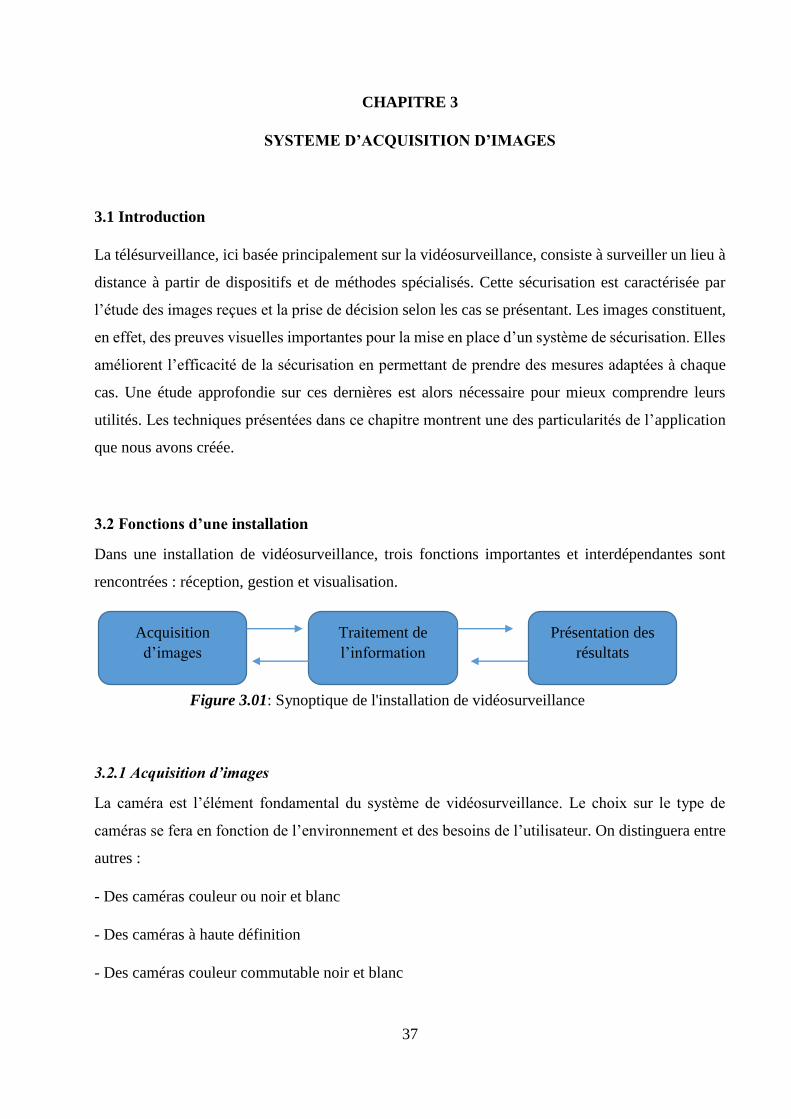
37
CHAPITRE 3
SYSTEME D’ACQUISITION D’IMAGES
3.1 Introduction
La télésurveillance, ici basée principalement sur la vidéosurveillance, consiste à surveiller un lieu à
distance à partir de dispositifs et de méthodes spécialisés. Cette sécurisation est caractérisée par
l’étude des images reçues et la prise de décision selon les cas se présentant. Les images constituent,
en effet, des preuves visuelles importantes pour la mise en place d’un système de sécurisation. Elles
améliorent l’efficacité de la sécurisation en permettant de prendre des mesures adaptées à chaque
cas. Une étude approfondie sur ces dernières est alors nécessaire pour mieux comprendre leurs
utilités. Les techniques présentées dans ce chapitre montrent une des particularités de l’application
que nous avons créée.
3.2 Fonctions d’une installation
Dans une installation de vidéosurveillance, trois fonctions importantes et interdépendantes sont
rencontrées : réception, gestion et visualisation.
3.2.1 Acquisition d’images
La caméra est l’élément fondamental du système de vidéosurveillance. Le choix sur le type de
caméras se fera en fonction de l’environnement et des besoins de l’utilisateur. On distinguera entre
autres :
- Des caméras couleur ou noir et blanc
- Des caméras à haute définition
- Des caméras couleur commutable noir et blanc
Acquisition
d’images
Traitement de
l’information
Présentation des
résultats
Figure 3.01: Synoptique de l'installation de vidéosurveillance
38
- Des caméras fixes, mobiles, discrètes
- Des caméras intérieures ou extérieures
Ces caméras associées à une machine hôte assurent l’acquisition des images à traiter.
3.2.2 Traitement de l’information
Cette fonction se sert des données obtenues par l’acquisition d’images pour travailler.
Différentes techniques de gestion permettent, en fonction des besoins d’exploitation, d’afficher une
ou plusieurs images sur un ou plusieurs écrans. Ce type d’affichage se fera au travers de différents
matériels prédéfinis lors de l’étude et correspondra aux besoins exprimés par le client. C’est dans
cette partie que viendra se greffer le pupitre de télécommande des caméras mobiles.
L’accomplissement de cette tâche peut aussi s’effectuer à l’aide de différents matériels tant software
que hardware.
3.2.3 Présentation des résultats
L’utilité de cette fonction est surtout remarquée au niveau du poste de garde ou du PC de sécurité.
Mais au cas où il y a absence de ce dernier, la charge qu’il doit effectuer est attribuée à un autre
service quelconque.
La première étape d’une étude d’installation de vidéosurveillance consiste à déterminer quelles
seront les zones à surveiller ; à partir de cette étape, on déterminera la nature des caméras en prenant
en compte l’environnement ; ensuite, on étudiera leur positionnement, cette phase nécessitant de
réfléchir au cheminement des câbles en concertation avec l’utilisateur final. Dès que les voies de
transmission aient été déterminées et que l’emplacement de la vidéo ait été fixé, il conviendrait de
présenter les différentes solutions du système et de décrire les différents scénarios.
3.3 Détection de mouvement par segmentation de premier plan et d’arrière-plan
Dans cette approche, nous modélisons chaque pixel par un groupe de clusters K où
chaque groupe est caractérisé par un poids et une valeur moyenne de pixel

39
appelé barycentre. Plus un pixel prend une couleur particulière, plus il est probable qu’il appartient
à l’arrière-plan. Cette technique est composée de quatre étapes principales : [14]
- La mise en correspondance des différents clusters
- L’adaptation
- La normalisation
- La classification
3.3.1 Mise en correspondance des différents clusters
La première étape de la segmentation consiste à comparer chacun des pixels d’entrée avec le groupe
de cluster correspondant. Le but est de trouver la correspondance avec le groupe qui a le poids le
plus élevé. Ainsi, la recherche est alors effectuée dans l'ordre décroissant de poids. Un seuil
supérieur à zéro est nécessaire pour tolérer les bruits d'acquisition. La valeur des seuils utilisés
dépend du type de caméra, plus cette caméra est performante, plus on utilise des seuils plus bas.
3.3.2 L’adaptation
Si, pour un pixel donné, aucun cluster de correspondance ne pourrait être trouvé au sein du groupe,
le cluster avec le poids minimal est remplacé par un nouveau cluster ayant le pixel comme son
barycentre et un faible poids initial. Le poids initial correspond à la probabilité qu'un nouveau cluster
appartient à l'arrière-plan. En tant que tel, il doit être réglé en fonction de la façon dont l'arrière-plan
dynamique est prévu. L'évolution rapide des milieux peuvent avoir un poids initial plus élevé, alors
qu'elle devrait être diminuée si l’arrière-plan est plus stationnaire.
Si un cluster de correspondance a été trouvé, les poids de tous les clusters dans le groupe de cluster
sont mis à jour à l'aide de l’équation :
𝑤𝑘′ = {𝑤𝑘 +
1
𝐿(1 − 𝑤𝑘) 𝑝𝑜𝑢𝑟 𝑘 = 𝑀𝑘
𝑤𝑘 +1
𝐿(0 − 𝑤𝑘) 𝑝𝑜𝑢𝑟 𝑘 ≠ 𝑀𝑘
(3.01)
où 𝑀𝑘 est l'indice du cluster correspondant, le paramètre L est utilisé pour contrôler la rapidité des
changements de scène. Des valeurs plus petites de L se traduiront par une adaptation plus rapide et
de plus grandes valeurs entraînent une adaptation lente.

40
3.3.3 La normalisation
Le poids d'un cluster correspond avec combien de fois il a été adapté. Si le poids est élevé, nous
pouvons en déduire que le pixel a souvent montré une couleur similaire à celle du barycentre,
et selon notre hypothèse, le cluster modélise l'arrière-plan. A l'inverse, si le poids est faible, le cluster
modélise probablement le premier plan. Cette observation peut être formalisée en assurant que les
poids du groupe de cluster aient un total à un. Par conséquent, après l'adaptation, les coefficients de
pondération sont normalisés en fonction de :
𝑤𝑘′ =𝑤𝑘
𝑆 ∀𝑘, 𝑜ù 𝑆 = ∑ 𝑤𝑘
(3.02)
3.3.4 La classification
Les pixels d'entrée sont ensuite classés en additionnant les poids de tous les groupes ayant un poids
supérieur à celui du cluster correspondant. Ainsi, le calcul trivial suivant est effectué :
𝑃 = ∑ 𝒘𝒌
𝐾−1
𝑘>𝑀𝑘
(3.03)
Le résultat P représente la proportion totale occupée par l’arrière-plan. Des valeurs élevées de P sont
la preuve que le pixel appartient au premier plan et des valeurs plus petites montrent qu’il appartient
à l’arrière-plan.
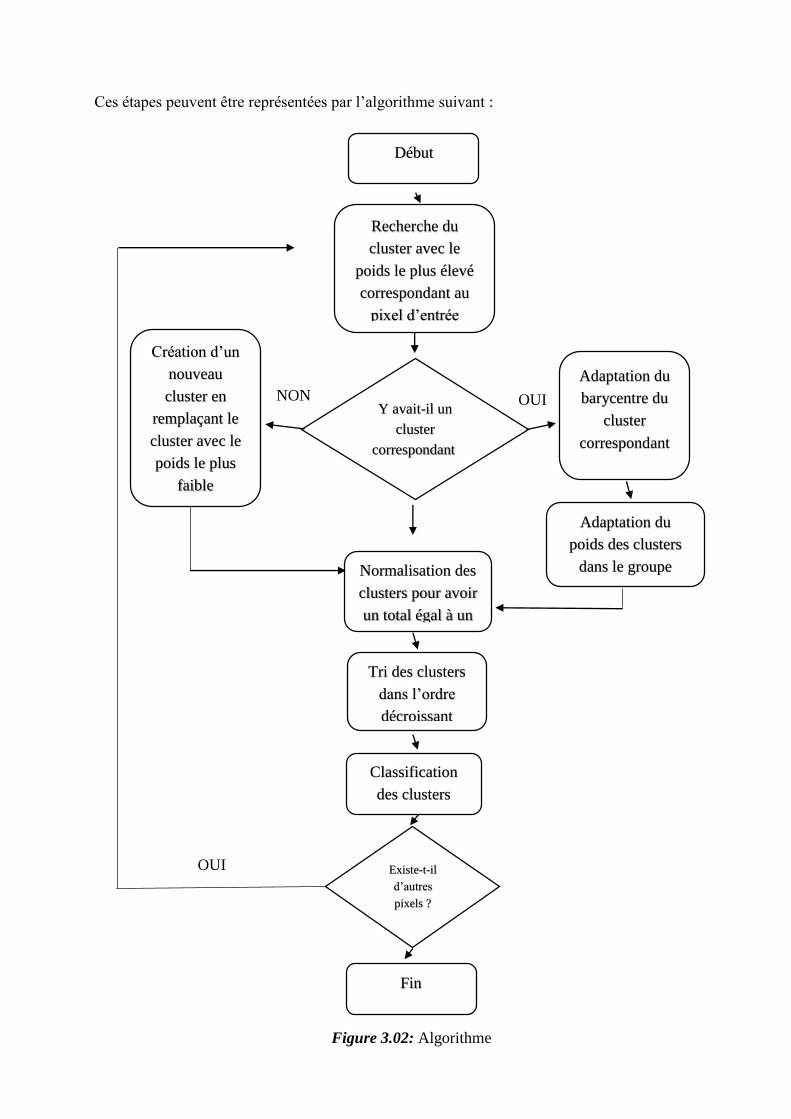
41
Ces étapes peuvent être représentées par l’algorithme suivant :
OUI
Tri des clusters
dans l’ordre
décroissant
Classification
des clusters
Fin
Existe-t-il
d’autres
pixels ?
Début
Recherche du
cluster avec le
poids le plus élevé
correspondant au
pixel d’entrée
Y avait-il un
cluster
correspondant
?
Création d’un
nouveau
cluster en
remplaçant le
cluster avec le
poids le plus
faible
Adaptation du
barycentre du
cluster
correspondant
Adaptation du
poids des clusters
dans le groupe Normalisation des
clusters pour avoir
un total égal à un
OUI NON
Figure 3.02: Algorithme
42
3.4 Détection faciale et suivi
3.4.1 Introduction
La détection de visage est un domaine de la vision par ordinateur consistant à détecter un visage
humain dans une image numérique. C'est un cas spécifique de détection d'objet, où l'on cherche à
détecter la présence et la localisation précise d'un ou plusieurs visages dans une image. C'est l'un
des domaines de la vision par ordinateur parmi les plus étudiés, avec de très nombreuses
publications, brevets, et de conférences spécialisées. La forte activité de recherche en détection de
visage a également permis de faire émerger des méthodes génériques de détection d'objet. La
détection de visage a de très nombreuses applications directes en vidéosurveillance, biométrie,
robotique, commande d'interface homme-machine, photographie, indexation d'images et de vidéos
et recherche d'images par le contenu. Elle permet également de faciliter l'automatisation complète
d'autres processus comme la reconnaissance de visage ou la reconnaissance d'expressions faciales.
3.4.2 Problématique
La détection de visage cherche à détecter la présence et la localisation précise d'un ou plusieurs
visages dans une image numérique. C'est un sujet difficile, notamment dû à la grande variabilité
d'apparence des visages dans des conditions non contraintes :
- Variabilité intrinsèque des visages humains (couleur, taille, forme)
- Présence ou absence de caractéristiques particulières (cheveux, moustache, barbe,
lunettes...)
- Expressions faciales modifiant la géométrie du visage
- Orientation et pose (de face, de profil)
- Conditions d'illumination et qualité de l'image
La détection de visage fait alors face à une forte variabilité. La technique de détection utilisée pour
la réalisation de ce projet est la méthode de Viola et Jones.
3.5 Méthode de Viola et Jones
La méthode de Viola et Jones est une méthode de détection d'objet dans une image numérique,
proposée par les chercheurs Paul Viola et Michael Jones en 2001. Elle fait partie des toutes
premières méthodes capables de détecter efficacement et en temps réel des objets dans une image.
43
Inventée à l'origine pour détecter des visages, elle peut également être utilisée pour détecter d'autres
types d'objets comme des voitures ou des avions. La méthode de Viola et Jones est l'une des
méthodes les plus connues et les plus utilisées, en particulier pour la détection de visages et la
détection de personnes.
En tant que procédé d'apprentissage supervisé, la méthode de Viola et Jones nécessite de quelques
centaines à plusieurs milliers d'exemples de l'objet que l'on souhaite détecter, pour entraîner un
classifieur. Une fois son apprentissage réalisé, ce classifieur est utilisé pour détecter la présence
éventuelle de l'objet dans une image en parcourant celle-ci de manière exhaustive, à toutes les
positions et dans toutes les tailles possibles.
Considérée comme étant l'une des plus importantes méthodes de détection d'objet, la méthode de
Viola et Jones est notamment connue pour avoir introduit plusieurs notions reprises ensuite par de
nombreux chercheurs en vision par ordinateur, à l'exemple de la notion d'image intégrale ou de la
méthode de classification construite comme une cascade de classifieurs boostés. [15]
3.5.1 Aspects de la méthode
La méthode de Viola et Jones est une approche basée sur l'apparence, qui consiste à parcourir
l'ensemble de l'image en calculant un certain nombre de caractéristiques dans des zones
rectangulaires qui se chevauchent. Elle a la particularité d'utiliser des caractéristiques très simples
mais très nombreuses. La méthode, en tant que méthode d'apprentissage supervisé, est divisée en
deux étapes : une étape d'apprentissage du classifieur basé sur un grand nombre d'exemples positifs
(c'est-à-dire les objets d'intérêt, par exemple des visages) et d'exemples négatifs, et une phase de
détection par application de ce classifieur à des images inconnues.
3.5.2 Notion de caractéristiques
3.5.2.1 Description
Pour être à la fois plus efficace et plus rapide, Viola et Jones proposent d'utiliser des caractéristiques,
c'est-à-dire une représentation synthétique et informative, calculée à partir des valeurs des pixels.
Ainsi, Viola et Jones définissent des caractéristiques très simples, les caractéristiques pseudo-Haar.
Les caractéristiques pseudo-Haar sont des caractéristiques utilisées en vision par ordinateur pour la
détection d'objet dans des images numériques. Ces caractéristiques considèrent des fenêtres de

44
détection ou masques délimitant des zones rectangulaires adjacentes. Elles sont calculées par la
différence des sommes de pixels de deux ou plusieurs zones rectangulaires adjacentes.
Figure 3.03: Exemple de types de caractéristiques utilisées par Viola et Jones
Dans le but d’accélérer et d’améliorer l’efficacité des calculs de ces caractéristiques, une autre
méthode appelée « image intégrale » a été développée. L’image intégrale est une représentation sous
la forme d'une image, de même taille que l'image d'origine, qui en chacun de ses points contient la
somme des pixels situés au-dessus de lui et à sa gauche. [16] Plus formellement, l'image intégrale
𝑖𝑖 au point (𝑥, 𝑦) est définie à partir de l'image i par :
𝑖𝑖(𝑥, 𝑦) = ∑ 𝑖(𝑥′, 𝑦′)
𝑥′≤𝑥, 𝑦′≤𝑦
(3.04)
3.5.2.2 Calcul
Les caractéristiques sont calculées à toutes les positions et à toutes les échelles dans une fenêtre de
détection de petite taille, typiquement de 24 × 24 pixels ou de 20 × 15 pixels. Ainsi, un très grand
nombre de caractéristiques par fenêtre est généré. Une fenêtre de 24 x 24 pixels utilisant la méthode
de Viola et Jones génère environ 160 000 caractéristiques.
En considérant un motif p et une image I de taille 𝑁 × 𝑁, la caractéristique associée au motif p de
l'image I est définie par :
∑ ∑ 𝐼(𝑖, 𝑗)1𝑝(𝑖,𝑗) 𝑖𝑠 𝑤ℎ𝑖𝑡𝑒 −
1≤𝑗≤𝑁1≤𝑖≤𝑁
∑ ∑ 𝐼(𝑖, 𝑗)1𝑝(𝑖,𝑗) 𝑖𝑠 𝑏𝑙𝑎𝑐𝑘
1≤𝑗≤𝑁1≤𝑖≤𝑁
(3.05)
45
En phase de détection, l'ensemble de l'image est parcouru en déplaçant la fenêtre de détection d'un
certain pas dans le sens horizontal et vertical. Les changements d'échelles se font en modifiant
successivement la taille de la fenêtre de détection. Viola et Jones utilisent un facteur multiplicatif
de 1,25, jusqu'à ce que la fenêtre couvre la totalité de l'image.
Pour obtenir une meilleure performance, une méthode de sélection est utilisée afin de différencier
les différentes caractéristiques.
3.5.3 Sélection de caractéristiques par boosting
Le deuxième élément clé de la méthode de Viola et Jones est l'utilisation d'une méthode de boosting
afin de sélectionner les meilleures caractéristiques. Le boosting est un principe qui consiste à
construire un classifieur « fort » à partir d'une combinaison pondérée de classifieurs « faibles »,
c'est-à-dire donnant en moyenne une réponse meilleure qu'un tirage aléatoire. Viola et Jones
adaptent ce principe en assimilant une caractéristique à un classifieur faible, en construisant un
classifieur faible qui n'utilise qu'une seule caractéristique. L'apprentissage du classifieur faible
consiste alors à trouver la valeur seuil de la caractéristique qui permet de mieux séparer les exemples
positifs des exemples négatifs. Le classifieur se réduit alors à un couple (caractéristique, seuil).
L'algorithme de boosting utilisé est en pratique une version modifiée d'AdaBoost, qui est utilisée à
la fois pour la sélection et pour l'apprentissage d'un classifieur « fort ». Les classifieurs faibles
utilisés sont souvent des arbres de décision. Un cas remarquable, fréquemment rencontré, est celui
de l'arbre de profondeur 1, qui réduit l'opération de classification à un simple seuillage. L'algorithme
est de type itératif, à nombre d'itérations déterminé. À chaque itération, l'algorithme sélectionne une
caractéristique, qui sera ajoutée à la liste des caractéristiques sélectionnées aux itérations
précédentes, et le tout va contribuer à la construction du classifieur fort final. Cette sélection se fait
en entraînant un classifieur faible pour toutes les caractéristiques et en sélectionnant celui avec
l'erreur la plus faible sur l'ensemble d'apprentissage. Le classifieur « fort » final construit par
AdaBoost est composé de la somme pondérée des classifieurs sélectionnés.
Plus formellement, on considère un ensemble de 𝑛 images (𝑥1, . . . , 𝑥𝑛) et leurs étiquettes associées
(𝑦1, . . . , 𝑦𝑛) qui sont telles que 𝑦𝑖 = 0 si l’image 𝑥𝑖 est un exemple négatif c’est-à-dire qu’elle ne
contient pas l’objet à détecter, et 𝑦𝑖 = 1 si 𝑥𝑖 est un exemple de l’objet à détecter. L'algorithme de
46
boosting est constitué d'un nombre 𝑇 d’itérations, et pour chaque itération t et chaque caractéristique
j, on construit un classifieur faible ℎ𝑗 . Le but est donc d’obtenir un classifieur ℎ qui prédise
exactement les étiquettes pour chaque échantillon, c’est-à-dire :
yi = h(xi) ∀ i ∈ {1 … n} (3.06)
3.5.4 Cascade de classifieurs
La méthode de Viola et Jones est basée sur une approche par recherche exhaustive sur l'ensemble
de l'image, qui teste la présence de l'objet dans une fenêtre à toutes les positions et à plusieurs
échelles. Cette approche est cependant extrêmement coûteuse en calcul. L'une des idées-clés de la
méthode pour réduire ce coût réside dans l'organisation de l'algorithme de détection en une cascade
de classifieurs.
Appliqués séquentiellement, ces classifieurs prennent une décision d'acceptation. Si la fenêtre
contient l'objet, l'exemple est alors passé au classifieur suivant, sinon l’exemple est définitivement
écarté. L'idée est que l'immense majorité des fenêtres testées étant négatives c’est-à-dire qui ne
contiennent pas l'objet, il est avantageux de pouvoir les rejeter avec le moins de calculs possibles.
Ici, les classifieurs les plus simples, donc les plus rapides, sont situés au début de la cascade, et
rejettent très rapidement la grande majorité des exemples négatifs. En pratique, l'apprentissage du
classifieur de l'étage n est réalisé avec les exemples qui ont passé l'étage n – 1. Ce classifieur doit
donc faire face à un problème plus difficile à chaque étage ; plus on monte dans les étages, plus les
classifieurs sont complexes. Le choix du nombre K d'étages est fixé par l'utilisateur mais dans leur
méthode originale, Viola et Jones utilisent K = 32 étages.
L’utilisation des classifieurs basés sur le Haar peut s’étendre au-delà de la détection faciale. En effet,
ils peuvent être utilisés dans le but de détecter des objets en bloc, des objets rigides, des voitures,
ainsi que les parties du corps humain telles que les yeux et la bouche. Un bon apprentissage de ces
classifieurs fait intervenir des milliers d’images positives de haute qualité. Le terme « image
positive » fait référence, ici, à une image contenant l’objet à détecter. Pour une détection faciale,
cela signifie qu’on doit utiliser des photos de têtes positionnées de la même façon avec une faible
variation au niveau de l’arrière-plan. Cela signifie que les yeux, les nez, et les bouches doivent tous
avoir la même position dans toutes les photos, et les images doivent avoir la même taille. Outre
47
l’utilisation des images positives, les classifieurs doivent aussi être entraînés à reconnaitre les
images négatives c’est-à-dire des images sans les objets à détecter.
3.6 Etapes clés de la détection faciale
3.6.1 Apprentissage
L'apprentissage est réalisé sur un très large ensemble d'images positives (c'est-à-dire contenant
l'objet) et négatives (ne contenant pas l'objet). Plusieurs milliers d'exemples sont en général
nécessaires. Cet apprentissage comprend :
- Le calcul des caractéristiques pseudo-Haar sur les exemples positifs et négatifs ;
- L'entraînement de la cascade : à chaque étage de la cascade, un classifieur fort est entraîné
par AdaBoost. Il est construit par ajouts successifs de classifieurs faibles entraînés sur une
seule caractéristique, jusqu'à l'obtention de performances conformes aux taux de détection
et de fausse alarme souhaités pour l'étage.
3.6.2 Détection
La détection s'applique sur une image de test, dans laquelle on souhaite déceler la présence et la
localisation d'un objet. En voici les étapes :
- parcours de l'ensemble de l'image à toutes les positions et échelles, avec une fenêtre de taille
24 × 24 pixels, et application de la cascade à chaque sous-fenêtre, en commençant par le
premier étage :
- calcul des caractéristiques pseudo-Haar utilisées par le classifieur de l'étage courant,
- puis calcul de la réponse du classifieur,
- passage ensuite à l'étage supérieur si la réponse est positive, sinon à la sous-fenêtre suivante,
- et enfin l'exemple est déclaré positif si les étages répondent positivement ;
- fusion des détections multiples : l'objet peut en effet générer plusieurs détections, à
différentes positions et échelles ; cette dernière étape fusionne les détections qui se
chevauchent pour ne retourner qu'un seul résultat.
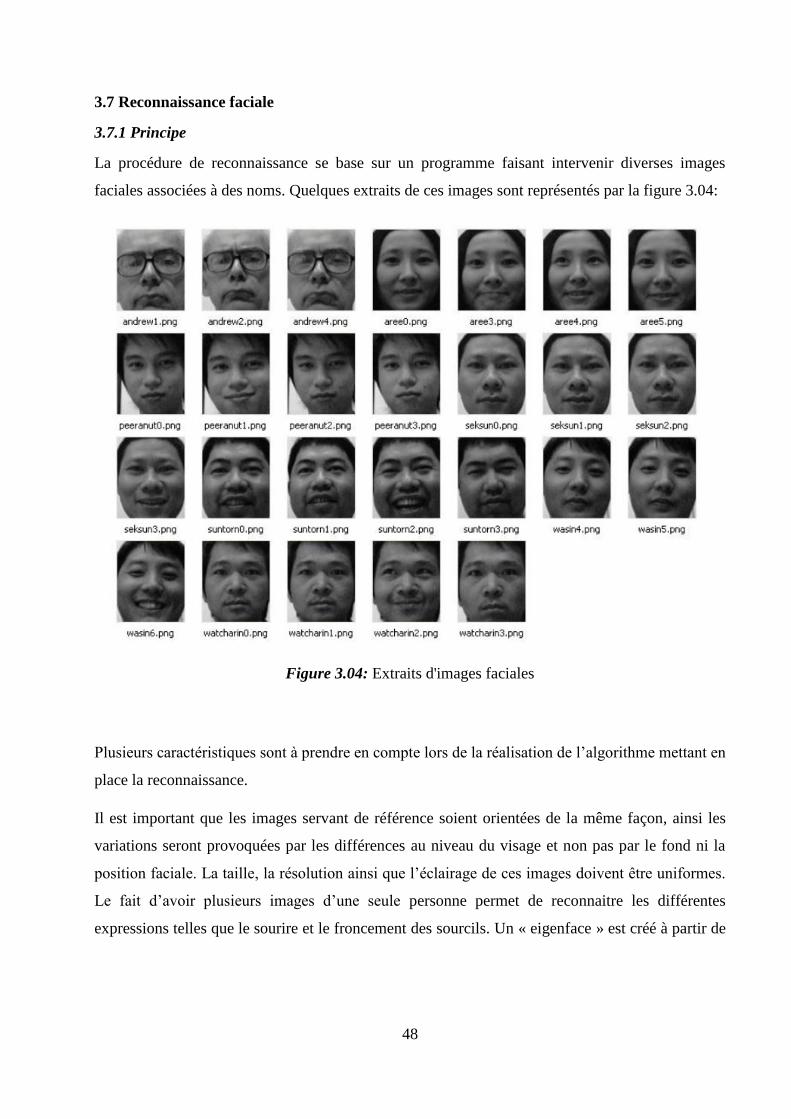
48
3.7 Reconnaissance faciale
3.7.1 Principe
La procédure de reconnaissance se base sur un programme faisant intervenir diverses images
faciales associées à des noms. Quelques extraits de ces images sont représentés par la figure 3.04:
Figure 3.04: Extraits d'images faciales
Plusieurs caractéristiques sont à prendre en compte lors de la réalisation de l’algorithme mettant en
place la reconnaissance.
Il est important que les images servant de référence soient orientées de la même façon, ainsi les
variations seront provoquées par les différences au niveau du visage et non pas par le fond ni la
position faciale. La taille, la résolution ainsi que l’éclairage de ces images doivent être uniformes.
Le fait d’avoir plusieurs images d’une seule personne permet de reconnaitre les différentes
expressions telles que le sourire et le froncement des sourcils. Un « eigenface » est créé à partir de
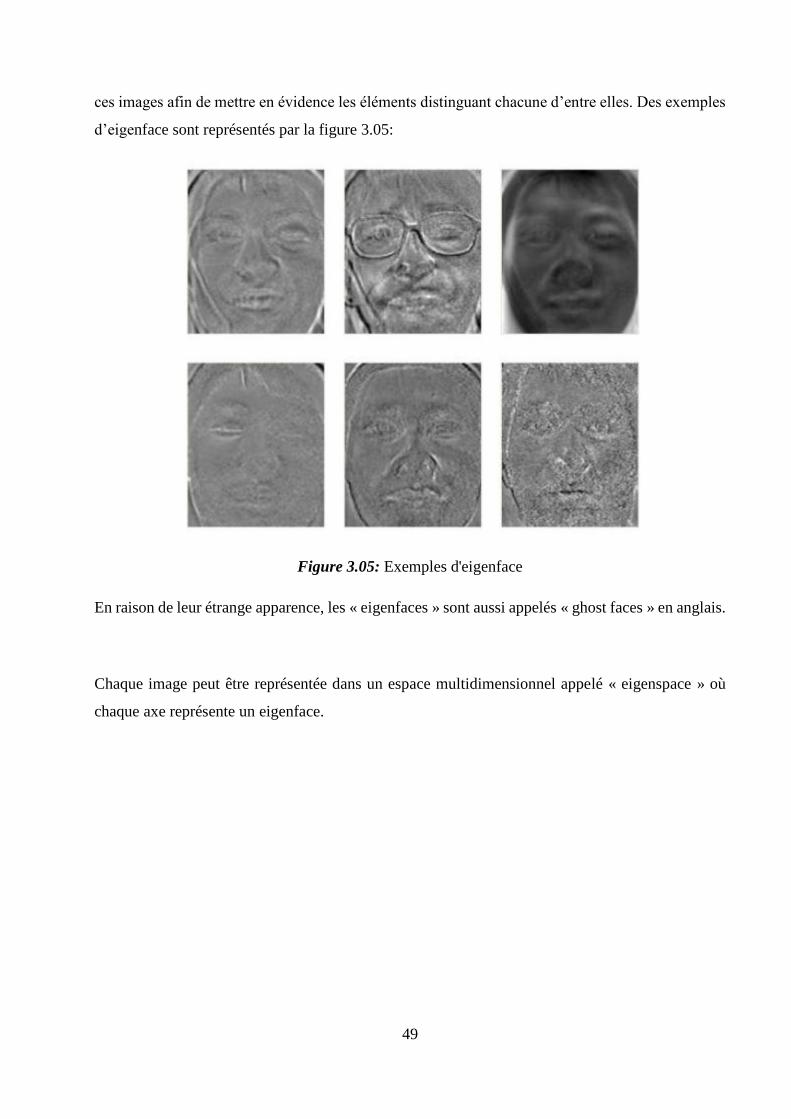
49
ces images afin de mettre en évidence les éléments distinguant chacune d’entre elles. Des exemples
d’eigenface sont représentés par la figure 3.05:
Figure 3.05: Exemples d'eigenface
En raison de leur étrange apparence, les « eigenfaces » sont aussi appelés « ghost faces » en anglais.
Chaque image peut être représentée dans un espace multidimensionnel appelé « eigenspace » où
chaque axe représente un eigenface.
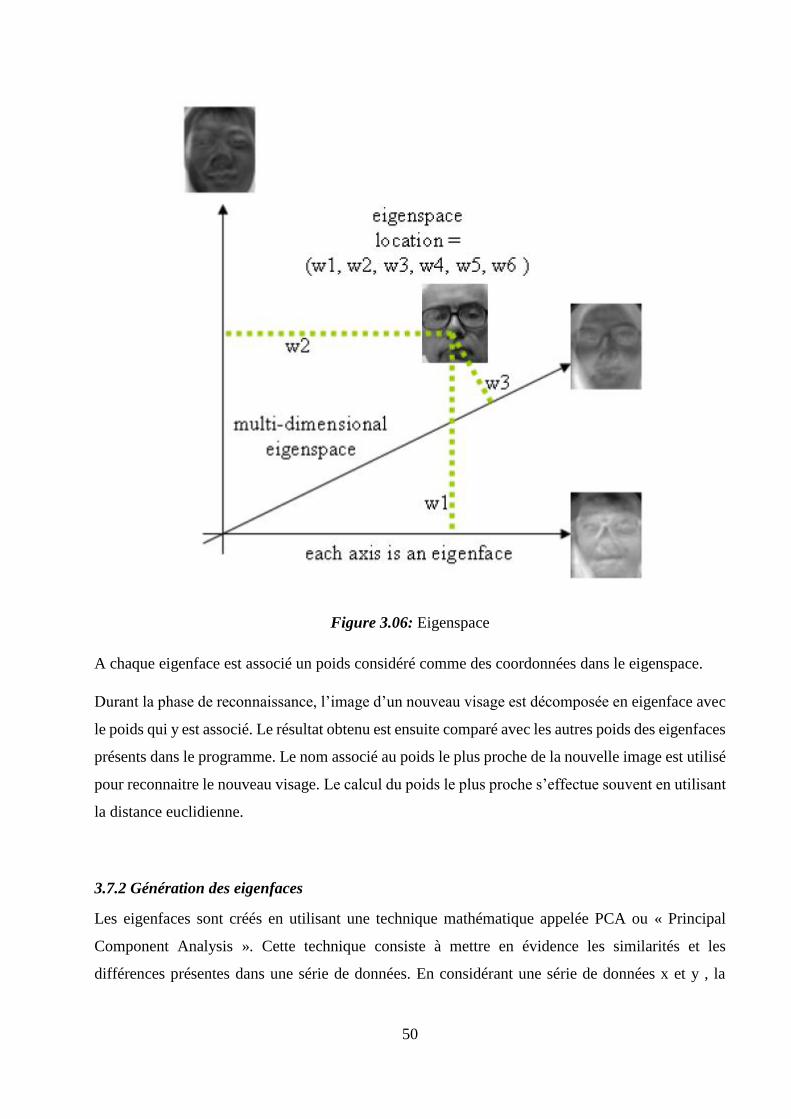
50
Figure 3.06: Eigenspace
A chaque eigenface est associé un poids considéré comme des coordonnées dans le eigenspace.
Durant la phase de reconnaissance, l’image d’un nouveau visage est décomposée en eigenface avec
le poids qui y est associé. Le résultat obtenu est ensuite comparé avec les autres poids des eigenfaces
présents dans le programme. Le nom associé au poids le plus proche de la nouvelle image est utilisé
pour reconnaitre le nouveau visage. Le calcul du poids le plus proche s’effectue souvent en utilisant
la distance euclidienne.
3.7.2 Génération des eigenfaces
Les eigenfaces sont créés en utilisant une technique mathématique appelée PCA ou « Principal
Component Analysis ». Cette technique consiste à mettre en évidence les similarités et les
différences présentes dans une série de données. En considérant une série de données x et y , la
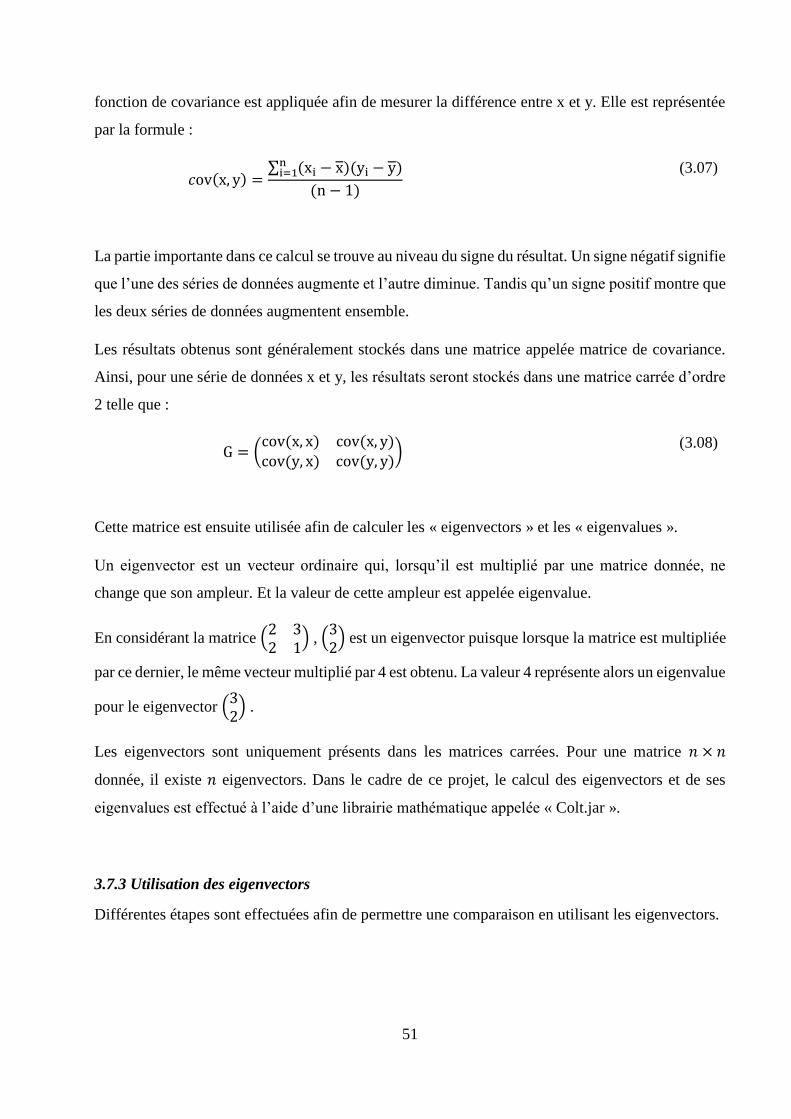
51
fonction de covariance est appliquée afin de mesurer la différence entre x et y. Elle est représentée
par la formule :
𝑐ov(x, y) =∑ (xi − x)(yi − y)n
i=1
(n − 1)
(3.07)
La partie importante dans ce calcul se trouve au niveau du signe du résultat. Un signe négatif signifie
que l’une des séries de données augmente et l’autre diminue. Tandis qu’un signe positif montre que
les deux séries de données augmentent ensemble.
Les résultats obtenus sont généralement stockés dans une matrice appelée matrice de covariance.
Ainsi, pour une série de données x et y, les résultats seront stockés dans une matrice carrée d’ordre
2 telle que :
G = (cov(x, x) cov(x, y)cov(y, x) cov(y, y)
) (3.08)
Cette matrice est ensuite utilisée afin de calculer les « eigenvectors » et les « eigenvalues ».
Un eigenvector est un vecteur ordinaire qui, lorsqu’il est multiplié par une matrice donnée, ne
change que son ampleur. Et la valeur de cette ampleur est appelée eigenvalue.
En considérant la matrice (2 32 1
) , (32
) est un eigenvector puisque lorsque la matrice est multipliée
par ce dernier, le même vecteur multiplié par 4 est obtenu. La valeur 4 représente alors un eigenvalue
pour le eigenvector (32
) .
Les eigenvectors sont uniquement présents dans les matrices carrées. Pour une matrice 𝑛 × 𝑛
donnée, il existe 𝑛 eigenvectors. Dans le cadre de ce projet, le calcul des eigenvectors et de ses
eigenvalues est effectué à l’aide d’une librairie mathématique appelée « Colt.jar ».
3.7.3 Utilisation des eigenvectors
Différentes étapes sont effectuées afin de permettre une comparaison en utilisant les eigenvectors.
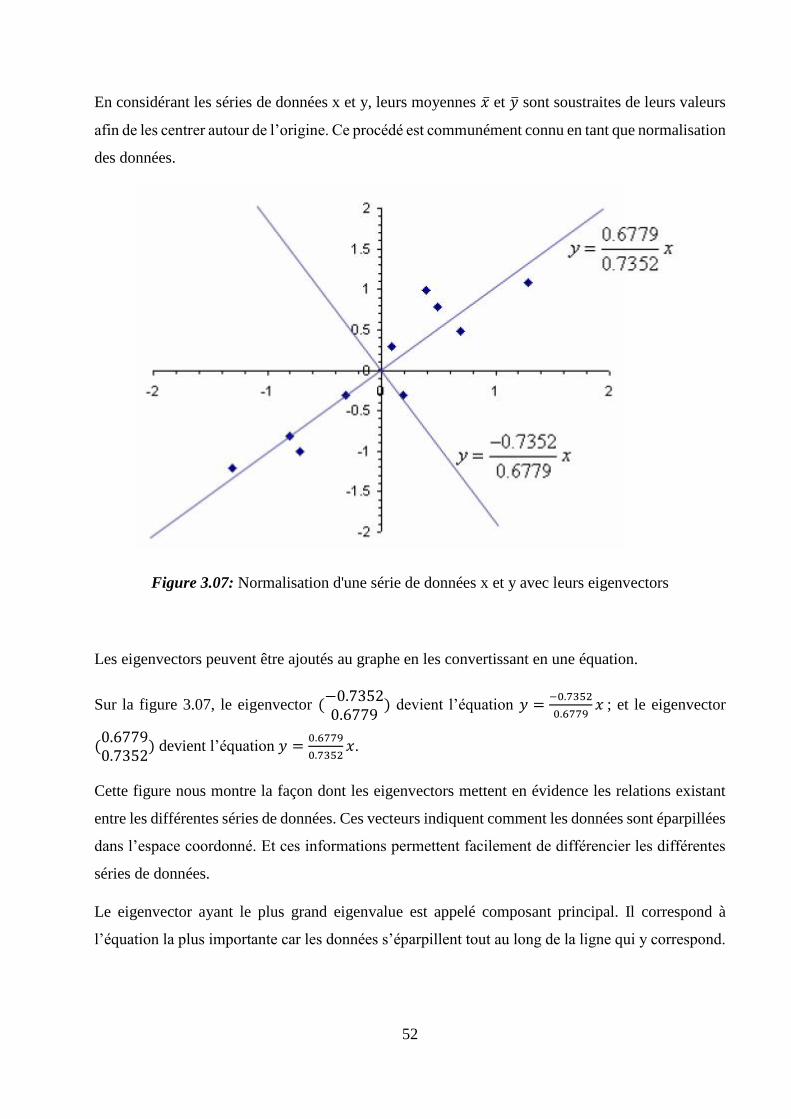
52
En considérant les séries de données x et y, leurs moyennes �̅� et �̅� sont soustraites de leurs valeurs
afin de les centrer autour de l’origine. Ce procédé est communément connu en tant que normalisation
des données.
Figure 3.07: Normalisation d'une série de données x et y avec leurs eigenvectors
Les eigenvectors peuvent être ajoutés au graphe en les convertissant en une équation.
Sur la figure 3.07, le eigenvector (−0.73520.6779
) devient l’équation 𝑦 =−0.7352
0.6779𝑥 ; et le eigenvector
(0.67790.7352
) devient l’équation 𝑦 =0.6779
0.7352𝑥.
Cette figure nous montre la façon dont les eigenvectors mettent en évidence les relations existant
entre les différentes séries de données. Ces vecteurs indiquent comment les données sont éparpillées
dans l’espace coordonné. Et ces informations permettent facilement de différencier les différentes
séries de données.
Le eigenvector ayant le plus grand eigenvalue est appelé composant principal. Il correspond à
l’équation la plus importante car les données s’éparpillent tout au long de la ligne qui y correspond.
53
Les autres eigenvectors contribuent en montrant comment les données sont positionnées par rapport
à l’eigenvector principal.
Il est à noter que tous les eigenvectors extraits d’une matrice sont perpendiculaires. Cela implique
qu’on peut effectuer une rotation de manière à ce que les eigenvectors soient alignés avec les axes.
Si l’on choisit d’effectuer une rotation du composant principal sur l’axe des y , on obtient alors la
figure 3.08 :
Figure 3.08: Rotation du composant principal
Arrivé à cette phase, nous pouvons effectuer la comparaison d’une nouvelle donnée avec les
résultats obtenus sur la figure ci-dessus. Mais afin d’accélérer la procédure de reconnaissance tout
en retenant suffisamment de données pour réaliser la différenciation, on diminue, en premier lieu,
la taille des données.
L’idée consiste à retenir les données mais en réduisant la dimensionnalité de l’eigenspace. Cette
procédure réduit la taille des données en enlevant certains axes, ce qui est donc équivalent à enlever
quelques eigenvectors. Les eigenvectors ayant le moins d’influence sur la propagation des données
sont retirés. Ils correspondent donc aux eigenvectors avec le minimum de eigenvalues.

54
Dans la figure précédente, le eigenvector contribuant le moins dans la propagation des informations
correspond à l’axe des abscisses. En enlevant cet axe, les données sont projetées sur l’axe des
ordonnées.
Figure 3.09: Projection des données sur l'axe des ordonnées
Cette approche permet de réduire de moitié le nombre de données stockées afin d’accélérer la
procédure de reconnaissance.
3.8 Conclusion
Pour conclure, les images constituent des éléments non négligeables d’un système de
télésurveillance. Elles en augmentent le taux d’efficacité. L’association des moyens utilisés par le
système de télésurveillance avec d’autres techniques telles que celles du réseau de la téléphonie
mobile améliore davantage son rendement. Ces différents faits montrent que l’utilisation des images
dans une application de sécurisation permet à la fois l’affranchissement des limites engendrées par
la distance et la suivie visuelle de tout évènement se déroulant dans un site.
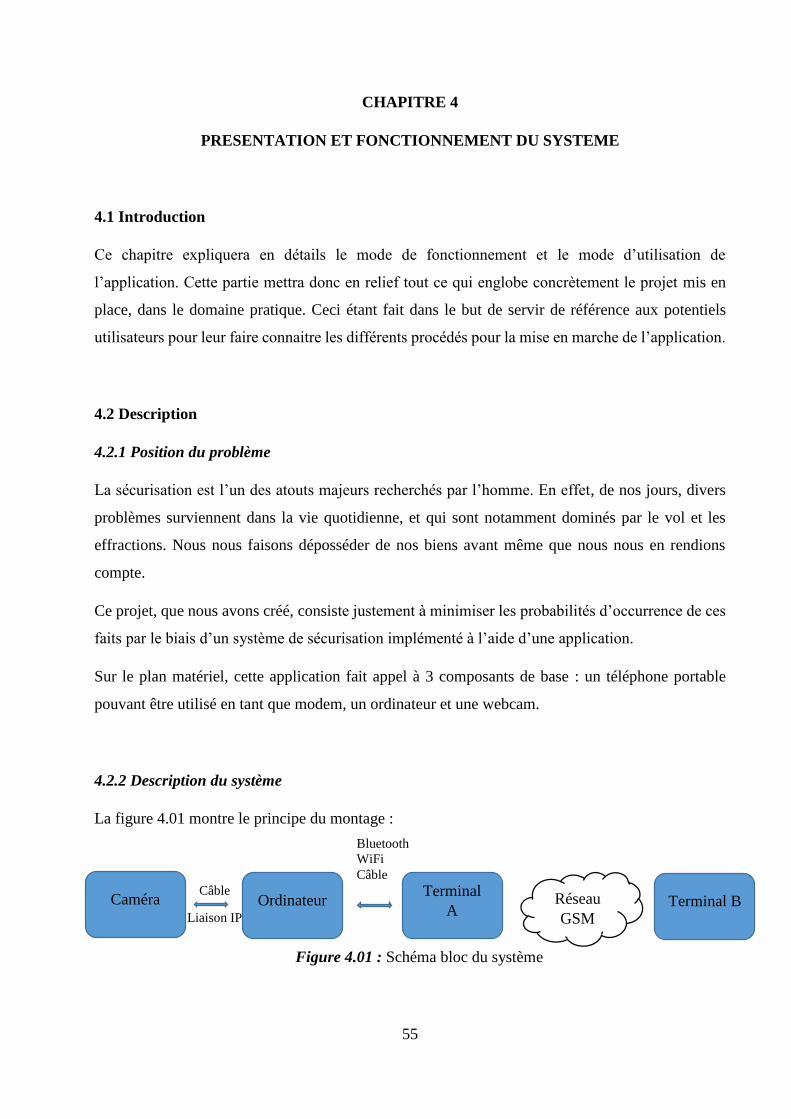
55
CHAPITRE 4
PRESENTATION ET FONCTIONNEMENT DU SYSTEME
4.1 Introduction
Ce chapitre expliquera en détails le mode de fonctionnement et le mode d’utilisation de
l’application. Cette partie mettra donc en relief tout ce qui englobe concrètement le projet mis en
place, dans le domaine pratique. Ceci étant fait dans le but de servir de référence aux potentiels
utilisateurs pour leur faire connaitre les différents procédés pour la mise en marche de l’application.
4.2 Description
4.2.1 Position du problème
La sécurisation est l’un des atouts majeurs recherchés par l’homme. En effet, de nos jours, divers
problèmes surviennent dans la vie quotidienne, et qui sont notamment dominés par le vol et les
effractions. Nous nous faisons déposséder de nos biens avant même que nous nous en rendions
compte.
Ce projet, que nous avons créé, consiste justement à minimiser les probabilités d’occurrence de ces
faits par le biais d’un système de sécurisation implémenté à l’aide d’une application.
Sur le plan matériel, cette application fait appel à 3 composants de base : un téléphone portable
pouvant être utilisé en tant que modem, un ordinateur et une webcam.
4.2.2 Description du système
La figure 4.01 montre le principe du montage :
Câble
Liaison IP
Bluetooth
WiFi
Câble
Caméra Ordinateur Terminal
A Terminal B Réseau
GSM
Figure 4.01 : Schéma bloc du système
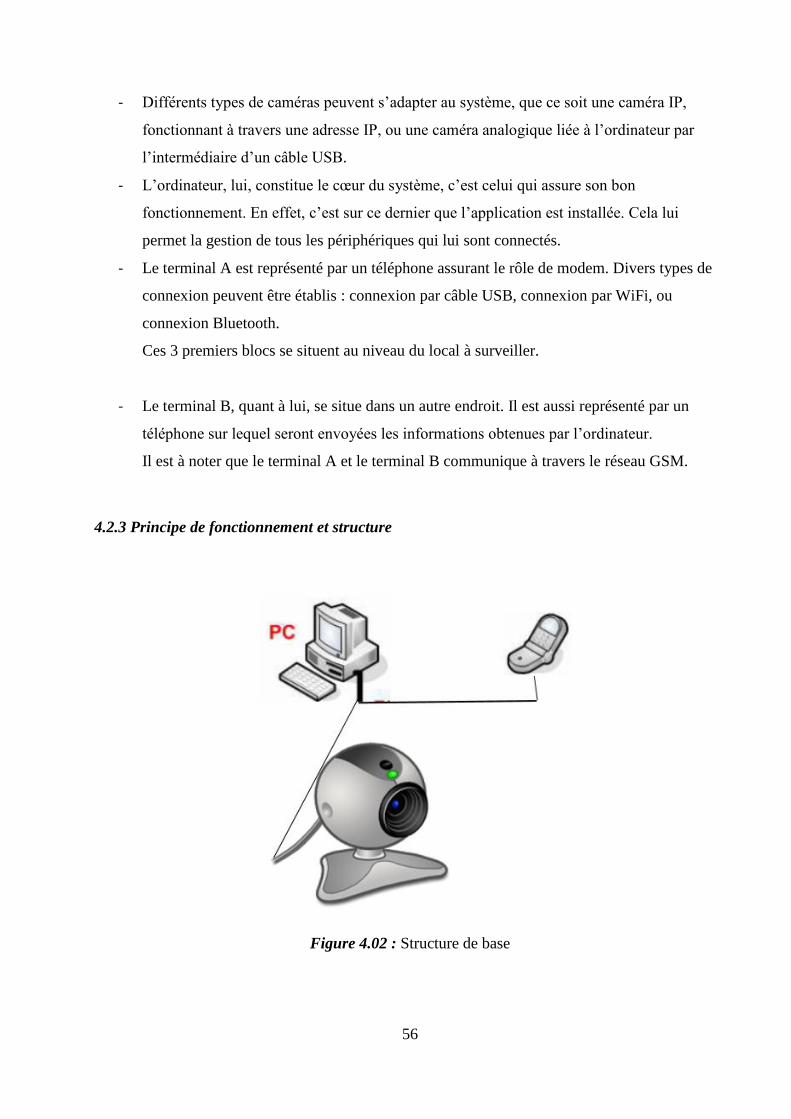
56
- Différents types de caméras peuvent s’adapter au système, que ce soit une caméra IP,
fonctionnant à travers une adresse IP, ou une caméra analogique liée à l’ordinateur par
l’intermédiaire d’un câble USB.
- L’ordinateur, lui, constitue le cœur du système, c’est celui qui assure son bon
fonctionnement. En effet, c’est sur ce dernier que l’application est installée. Cela lui
permet la gestion de tous les périphériques qui lui sont connectés.
- Le terminal A est représenté par un téléphone assurant le rôle de modem. Divers types de
connexion peuvent être établis : connexion par câble USB, connexion par WiFi, ou
connexion Bluetooth.
Ces 3 premiers blocs se situent au niveau du local à surveiller.
- Le terminal B, quant à lui, se situe dans un autre endroit. Il est aussi représenté par un
téléphone sur lequel seront envoyées les informations obtenues par l’ordinateur.
Il est à noter que le terminal A et le terminal B communique à travers le réseau GSM.
4.2.3 Principe de fonctionnement et structure
Figure 4.02 : Structure de base
57
L’application fait appel à 3 composants interagissant entre eux : un ordinateur, une webcam et un
téléphone portable. Et elle tourne au niveau de l’ordinateur. Avant de définir plus précisément le
déroulement de ce projet, il est nécessaire de savoir que tous les phénomènes qui suivent sont
supposés se dérouler dans un endroit démuni de présence, mais toutefois les autres cas ont aussi
leurs places. Dans le premier cas, après activation de la sécurisation intelligente, aux moindres
mouvements suspects, la webcam envoie un signal vers l’ordinateur en lui indiquant qu’un
évènement à risque potentiel est survenu. L’ordinateur, lui, traduit cette information en tant
qu’approbation afin de permettre au téléphone de mettre au courant l’hôte du site concerné soit par
l’intermédiaire d’un message texte, soit par appel ou même les deux suivant les préférences de
l’utilisateur.
4.3 Objectifs
Ce système de vidéosurveillance a deux fonctions principales :
La dissuasion :
En effet, les systèmes de vidéosurveillance sont dissuasifs car ils sont généralement visibles de tous.
Et cela constitue une manière efficace pour toutes sortes de vols, intrusions et dégradations.
La surveillance :
Outre le phénomène de dissuasion, ce système de surveillance peut aussi bien être discret que
voyant. Le résultat recherché étant le même c’est-à-dire surveiller une zone où le risque et la menace
sont présents.
L’objectif est donc de contribuer à la sécurité de biens ou de personnes.
4.4 Présentation de la réalisation
4.4.1 Choix du langage
Java est un langage de programmation moderne très utilisé dans le monde. Il est surtout renommé
pour sa portabilité ; en effet, c’est un langage de programmation informatique orienté objet dont la
58
particularité et l’objectif central sont de faciliter le fonctionnement d’un même logiciel sur différents
systèmes d’exploitation.
La programmation orientée objet consiste à faire interagir plusieurs briques de logiciels appelées
objet. Un objet peut être défini comme étant une structure de données cachées et munies de valeur,
et qui répond à un ensemble de messages. Il est surtout caractérisé par des attributs et des méthodes
lui permettant d’interagir avec d’autres objets.
Java est normalement utilisée pour développer des applications graphiques. Il est à noter que le
logiciel ayant permis la conception de ce travail est Eclipse IDE (Integrated Development
Environment). Eclipse IDE est un environnement de développement libre codé en java et dont
l’architecture est totalement développée autour de la notion de plug-in, c’est-à-dire que si nous
voulons ajouter de nouvelles fonctionnalités à Eclipse, nous devons télécharger le plug-in
correspondant, copier les fichiers spécifiés dans les répertoires spécifiés et démarrer Eclipse. Pour
pouvoir l’utiliser, il est impératif d’avoir un environnement java ou JRE (Java Runtime
Environment) sur la machine. Un JRE permet la lecture des programmes qui ont été codés en java.
Effectivement, dans ce JRE se trouve le cœur de java : le JVM (Java Virtual Machine). C’est cette
dernière qui permet l’exécution des programmes java sur votre machine. C’est-à-dire qu’avant
d’être utilisés par la machine virtuelle, les programmes java sont précompilés en byte code par votre
IDE. Et c’est à partir de ce byte code que le JVM arrive à comprendre le programme permettant
d’effectuer le lien entre le code et votre machine.
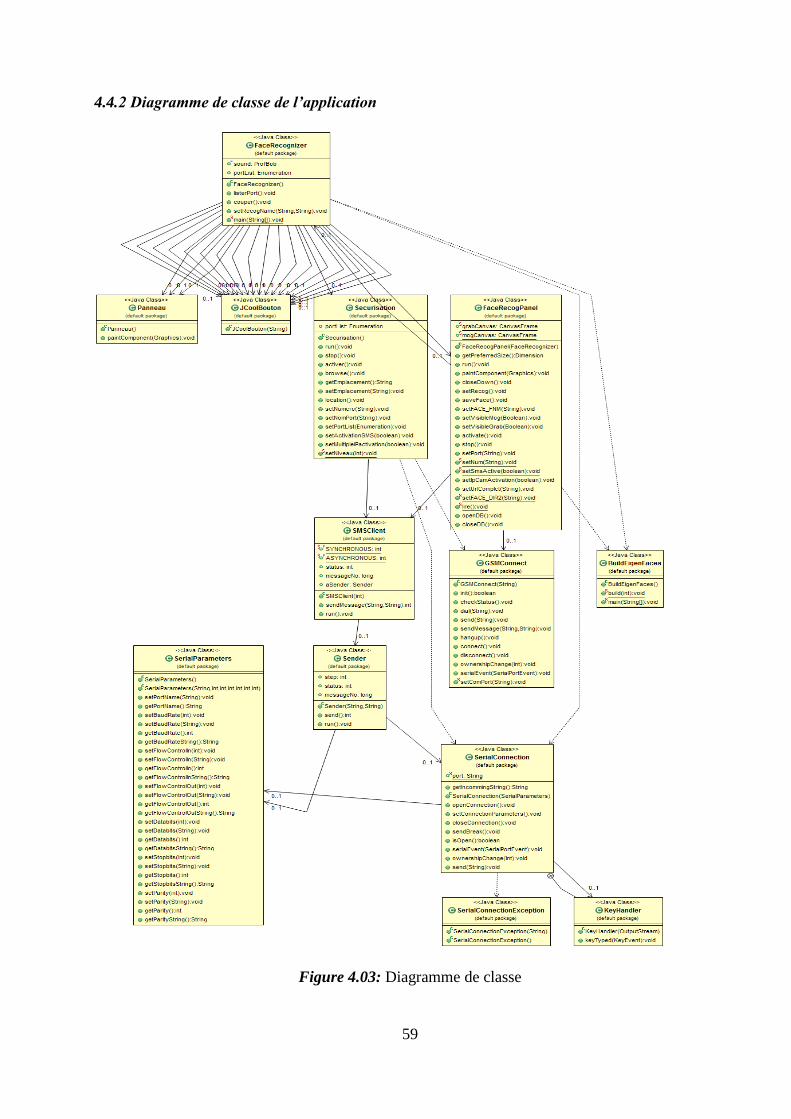
59
4.4.2 Diagramme de classe de l’application
Figure 4.03: Diagramme de classe
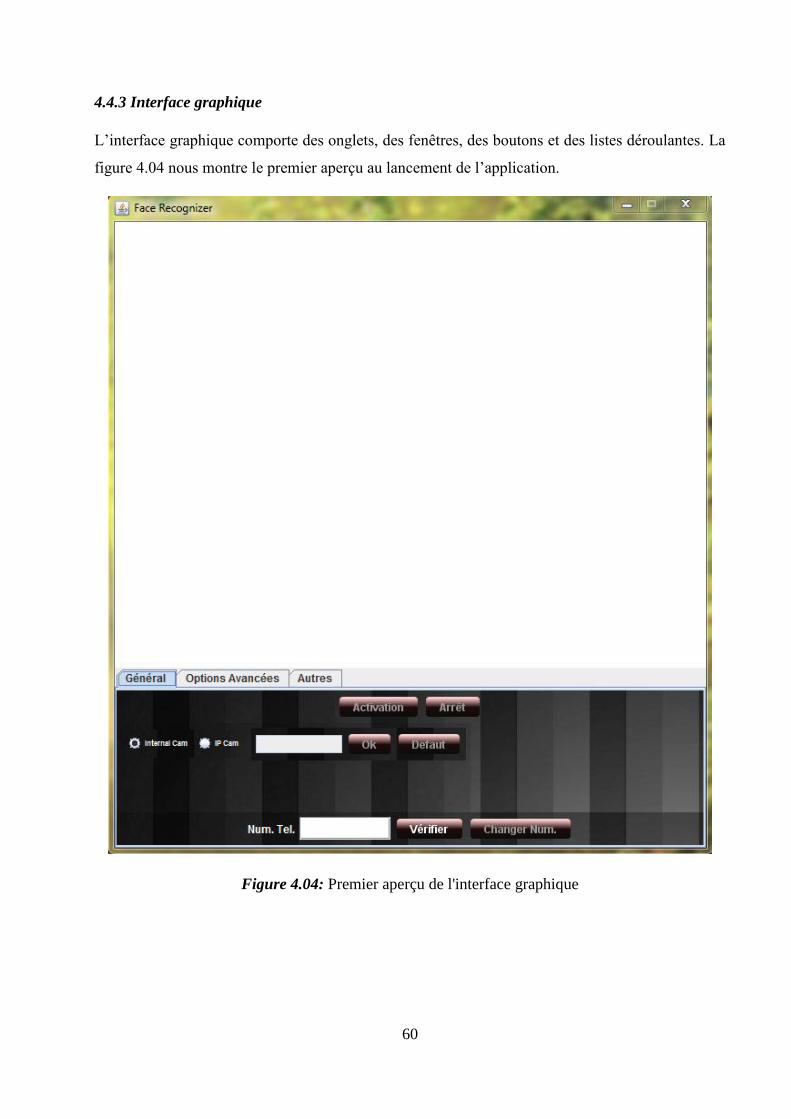
60
4.4.3 Interface graphique
L’interface graphique comporte des onglets, des fenêtres, des boutons et des listes déroulantes. La
figure 4.04 nous montre le premier aperçu au lancement de l’application.
Figure 4.04: Premier aperçu de l'interface graphique
61
4.4.4 Configuration matérielle :
Les matériels fondamentaux permettant le fonctionnement de l’application sont : l’ordinateur, un
téléphone portable et une caméra.
L’application accepte de larges gammes de caméras y compris les cameras USB ainsi que les
cameras IP, du moment que celles-ci soient reconnues par l’application. Le téléphone, quant à lui,
peut être connecté à l’ordinateur de diverses manières :
- par liaison bluetooth
- en utilisant le WiFi
- ou par câble USB
Le but recherché, ici, étant de pouvoir utiliser le téléphone en tant que modem. Une fois qu’il est
reconnu en tant que modem, l’ordinateur lui alloue un port de communication qui sera utile pour le
bon fonctionnement de l’application. Dans Windows, ce port est connu en suivant la méthode
suivante :
Panneau de configuration >> Téléphone et modem >> Modems
Cette méthode permet d’accéder à l’utilitaire qui indiquera les différents ports utilisés.
4.4.5 Configuration de l’application
Cette application offre une interface graphique, qui se veut être très simple à manipuler, permettant
ainsi de cibler tout genre de personnes ayant ou non une connaissance avancée en informatique.
4.4.5.1 L’onglet « Général »
Cet onglet est affiché dès le démarrage de l’application. Il présente les configurations de base pour
mettre l’application en marche. Dans l’onglet général, on retrouve alors les interactions de base. La
caméra et le modem, étant connectés au préalable, avant de pouvoir lancer la surveillance,
l’utilisateur est invité à entrer le numéro du téléphone à joindre en cas d’alerte. Un champ réservé à
cette utilisation est visible dans l’onglet « Général ».
62
Figure 4.05: Champ pour le numéro de téléphone
Afin d’éviter toutes erreurs, comme l’ajout de numéro erroné ou de caractères alphabétiques, un
système de contrôle de données à base de regex ou expressions régulières a été implémenté dans ce
champ. Ce système permet, entre autre, d’empêcher l’utilisateur d’entrer des données invalides
pouvant nuire au bon fonctionnement de l’application.
Après la saisie du numéro de téléphone, l’utilisateur doit vérifier ce numéro par l’intermédiaire du
bouton « Vérifier » pour pouvoir continuer.
Figure 4.06: Schéma des boutons de contrôle du numéro de téléphone
Si tout s’est bien déroulé, l’application renvoie un message affirmant que le numéro a bien été
enregistré.
Figure 4.07: Schéma de la vérification avec succès
Sinon, si un problème a été détecté par l’application, un message d’erreur apparaît et l’utilisateur
doit à nouveau entrer un numéro.
63
Figure 4.08: Schéma de détection d'erreur après vérification
Ensuite, cet onglet nous offre aussi la possibilité de choisir le type de caméras qu’on veut utiliser.
Pour cela, il met à notre disposition deux choix :
- l’utilisation de la caméra interne
- l’utilisation d’une caméra IP
Figure 4.09: Choix sur le type de caméra principale à utiliser
En optant pour « Internal Cam », l’application détectera automatiquement la webcam raccordée à
l’ordinateur, tandis que pour « IP Cam », on doit spécifier l’adresse IP, le port, ainsi que le mode
d’accès de la caméra en question.
En se basant sur le fait que l’utilisateur ait saisi un numéro correct, le bouton « Activation » de
l’application devient actif et l’utilisateur peut commencer la surveillance.
Figure 4.10: Schéma du bouton d'activation

64
4.4.5.2 L’onglet « Options Avancées »
Figure 4.11: Schéma présentant l'onglet "Options Avancées"
Cette interface présente trois grandes parties de configuration :
- configuration de la camera IP
- configuration du modem
65
- configuration de la sécurisation
En plus de l’alerte par l’intermédiaire d’un message et d’un appel, cette application capture aussi,
en image, tous les évènements ayant déclenché l’alerte. Le répertoire d’enregistrement de ces
images peut être modifié par l’utilisateur. Par défaut, ce répertoire est localisé dans les documents
personnels de l’utilisateur.
Figure 4.12: Schéma du répertoire d'enregistrement
En effet, cela permet d’identifier, en cas de fuite, l’individu ayant commis le délit.
Il est à noter que l’utilisateur n’est pas limité à des emplacements locaux mais il peut enregistrer ces
images dans une autre machine connectée sur le même réseau.
Sur la figure 4.12, nous pouvons remarquer qu’il existe deux répertoires d’enregistrement. Le
premier est utilisé pour l’enregistrement des images provenant de la caméra principale configurée
dans l’onglet « Général ». Le second répertoire est, quant-à-lui, utilisé pour les caméras IP
additionnelles que l’on peut ajouter à partir de l’onglet « Options Avancées ».
En effet, outre l’utilisation d’une caméra principale, l’utilisateur peut choisir d’ajouter d’autres types
de caméras pour la surveillance. Un bouton réservé à cet effet est mis à la disposition de l’utilisateur
comme la figure 4.13 nous le montre.
Figure 4.13: Schéma des configurations pour l'ajout de caméras IP
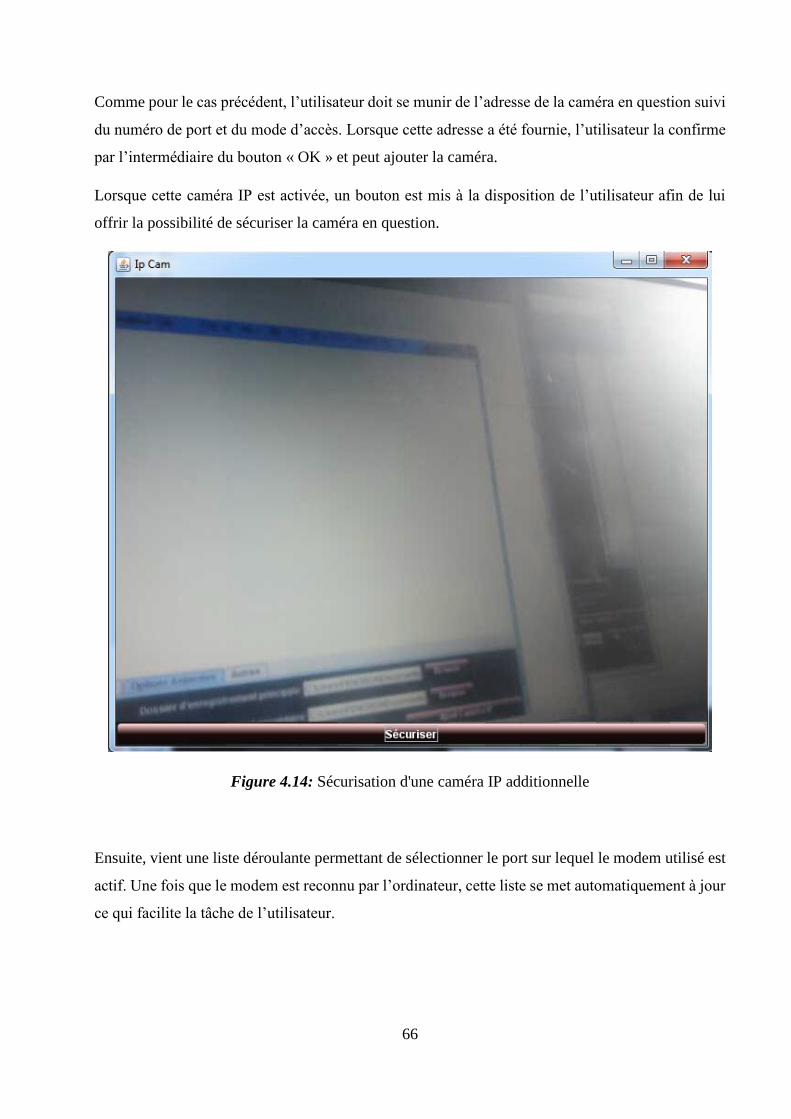
66
Comme pour le cas précédent, l’utilisateur doit se munir de l’adresse de la caméra en question suivi
du numéro de port et du mode d’accès. Lorsque cette adresse a été fournie, l’utilisateur la confirme
par l’intermédiaire du bouton « OK » et peut ajouter la caméra.
Lorsque cette caméra IP est activée, un bouton est mis à la disposition de l’utilisateur afin de lui
offrir la possibilité de sécuriser la caméra en question.
Figure 4.14: Sécurisation d'une caméra IP additionnelle
Ensuite, vient une liste déroulante permettant de sélectionner le port sur lequel le modem utilisé est
actif. Une fois que le modem est reconnu par l’ordinateur, cette liste se met automatiquement à jour
ce qui facilite la tâche de l’utilisateur.
67
Figure 4.15: Paramétrage du port modem utilisé
Les réglages suivants concernent l’activation ou la désactivation des alertes SMS. Grâce à ces
paramètres, l’utilisateur peut être informé par l’intermédiaire d’un SMS de la présence d’un danger
de premier niveau. Ainsi, si un danger est capté par la caméra, une alerte de premier niveau est
envoyée vers l’utilisateur par le biais d’un SMS. Puis, un appel confirmera que l’alerte est
effectivement un danger imminent.
Figure 4.16: Activation/Désactivation de l'alerte SMS
4.4.5.3 L’onglet « Autres »
Cet onglet nous permet d’effectuer une configuration standard sur l’affichage, le son ainsi que le
paramétrage de la reconnaissance faciale.
Trois boutons sont mis à la disposition de l’utilisateur pour la configuration de la reconnaissance
faciale :
- activation de la reconnaissance
- enregistrement du visage détecté
- mise à jour des données de l’application
Figure 4.17: Configuration de la reconnaissance faciale
68
Pour permettre à l’application de reconnaître un nouveau visage, on peut l’ajouter grâce au bouton
« Save Face », une fois qu’un visage a été détecté. Pour cela, on écrit le nom correspondant au
visage détecté sur la partie réservée à cet effet. Ensuite on met à jour les données par l’intermédiaire
du bouton « update » et on redémarre l’application.
On peut aussi activer le son aidant pour le paramétrage de l’application grâce à une case à cocher.
Figure 4.18: Activation du son
Et enfin, les deux dernières configurations concernent l’affichage de la caméra et du masque de
détection.
Figure 4.19: Boutons de gestion de l'affichage
4.5 Réalisation pratique
Dans cette pratique, nous allons utiliser quatre matériels ayant des rôles bien précis :
- un ordinateur de marque « Samsung » sur lequel tournera l’application
- un téléphone « Samsung Galaxy S» qui jouera le rôle de caméra IP
- un téléphone « Nokia Asha 306 » utilisé en tant que modem
- un téléphone « Alcatel » qui recevra les alertes

69
Figure 4.20: Matériels utilisés
4.5.1 Configuration
Des informations sont nécessaires pour démarrer la sécurisation.
En premier lieu, nous allons configurer le modem. Dans cet exemple, la liaison établie entre
l’ordinateur et le téléphone « Nokia » est une liaison Bluetooth. Grâce à l’utilisation du logiciel de
Nokia dénommé « Nokia PC-Suite », ce téléphone peut être reconnu par l’ordinateur en tant que
modem. Une fois cette étape effectuée, on récupère le port de communication utilisé par le modem.
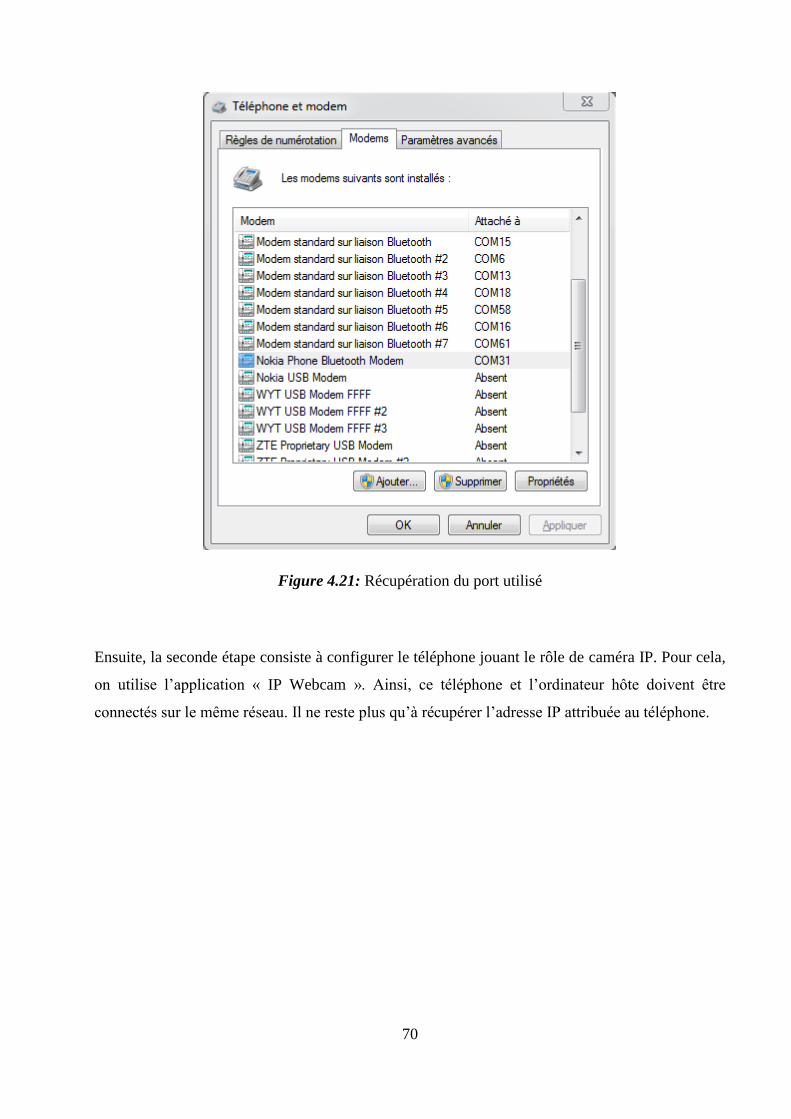
70
Figure 4.21: Récupération du port utilisé
Ensuite, la seconde étape consiste à configurer le téléphone jouant le rôle de caméra IP. Pour cela,
on utilise l’application « IP Webcam ». Ainsi, ce téléphone et l’ordinateur hôte doivent être
connectés sur le même réseau. Il ne reste plus qu’à récupérer l’adresse IP attribuée au téléphone.
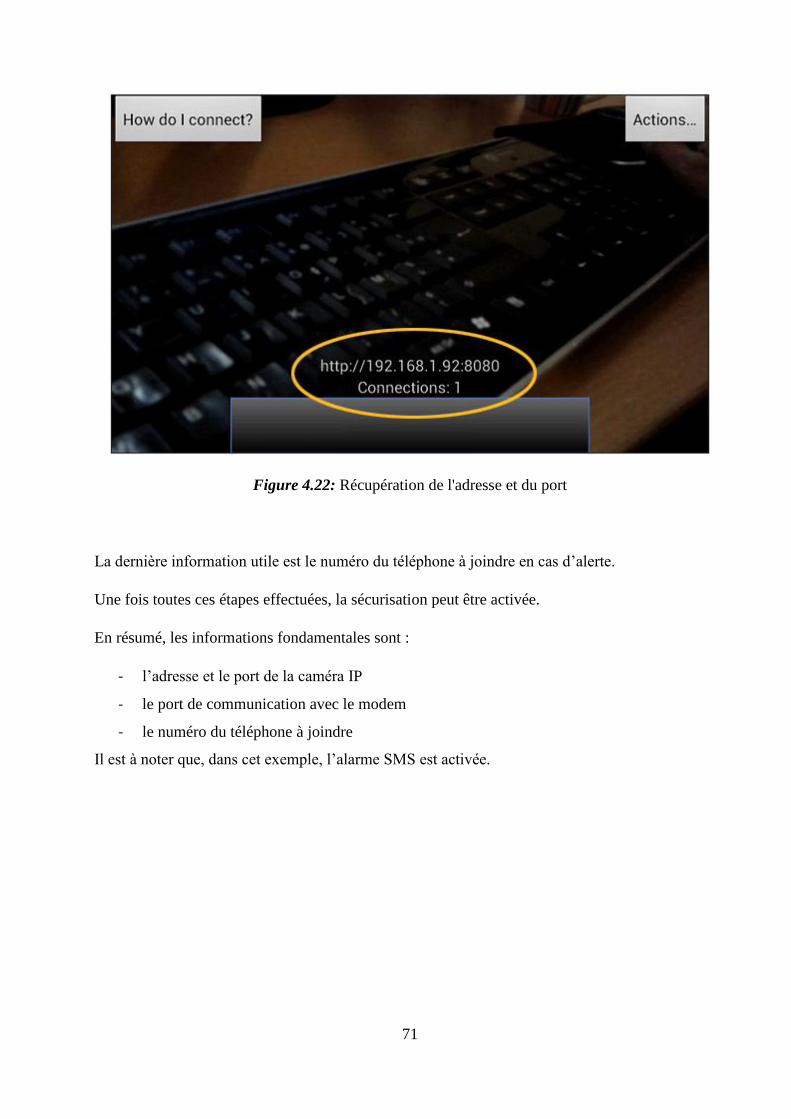
71
Figure 4.22: Récupération de l'adresse et du port
La dernière information utile est le numéro du téléphone à joindre en cas d’alerte.
Une fois toutes ces étapes effectuées, la sécurisation peut être activée.
En résumé, les informations fondamentales sont :
- l’adresse et le port de la caméra IP
- le port de communication avec le modem
- le numéro du téléphone à joindre
Il est à noter que, dans cet exemple, l’alarme SMS est activée.
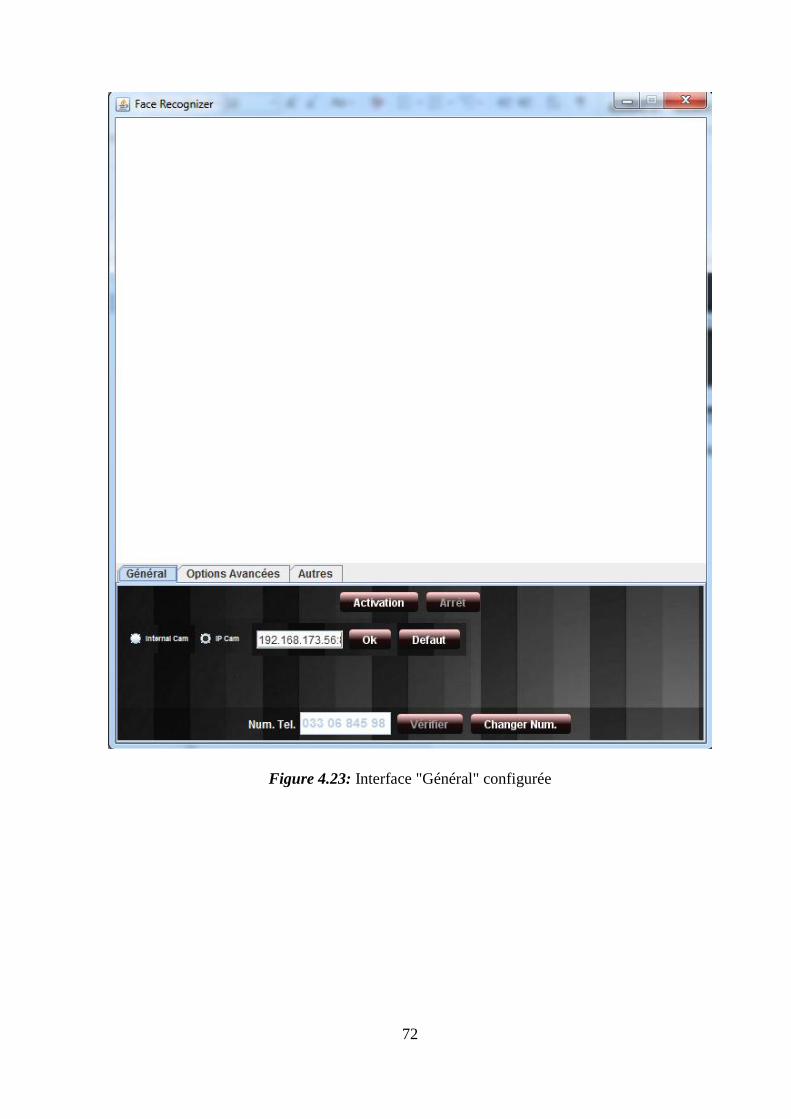
72
Figure 4.23: Interface "Général" configurée
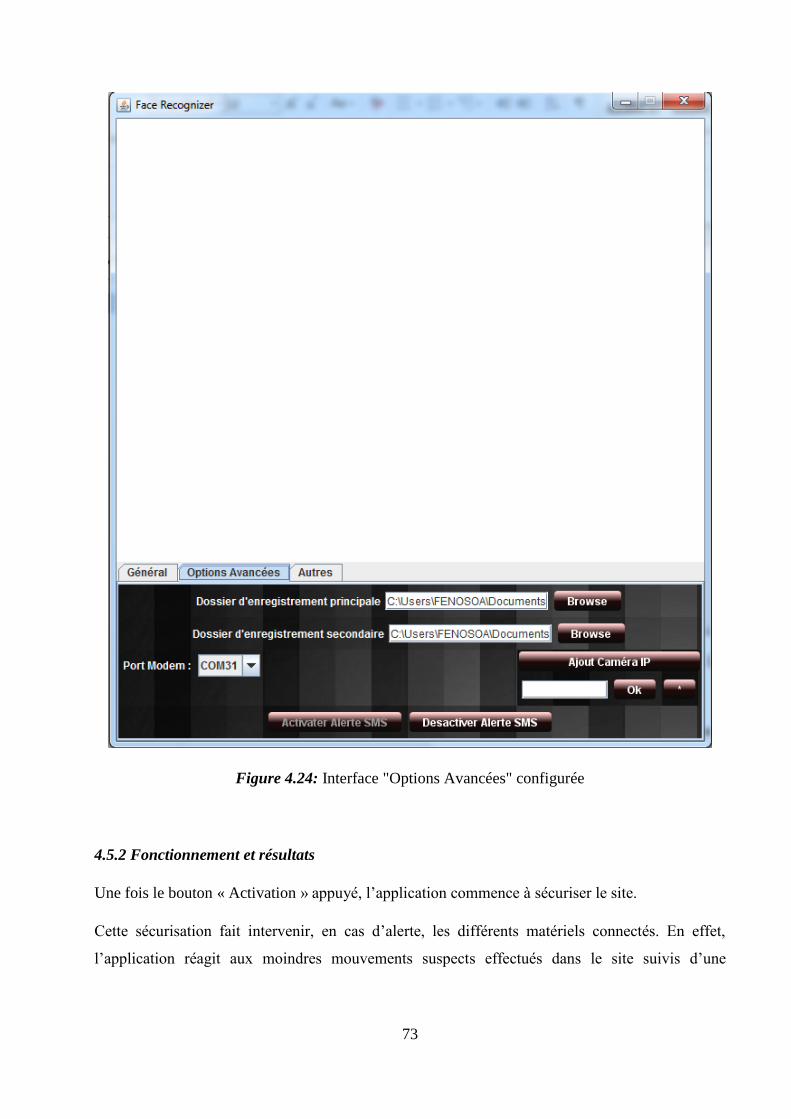
73
Figure 4.24: Interface "Options Avancées" configurée
4.5.2 Fonctionnement et résultats
Une fois le bouton « Activation » appuyé, l’application commence à sécuriser le site.
Cette sécurisation fait intervenir, en cas d’alerte, les différents matériels connectés. En effet,
l’application réagit aux moindres mouvements suspects effectués dans le site suivis d’une
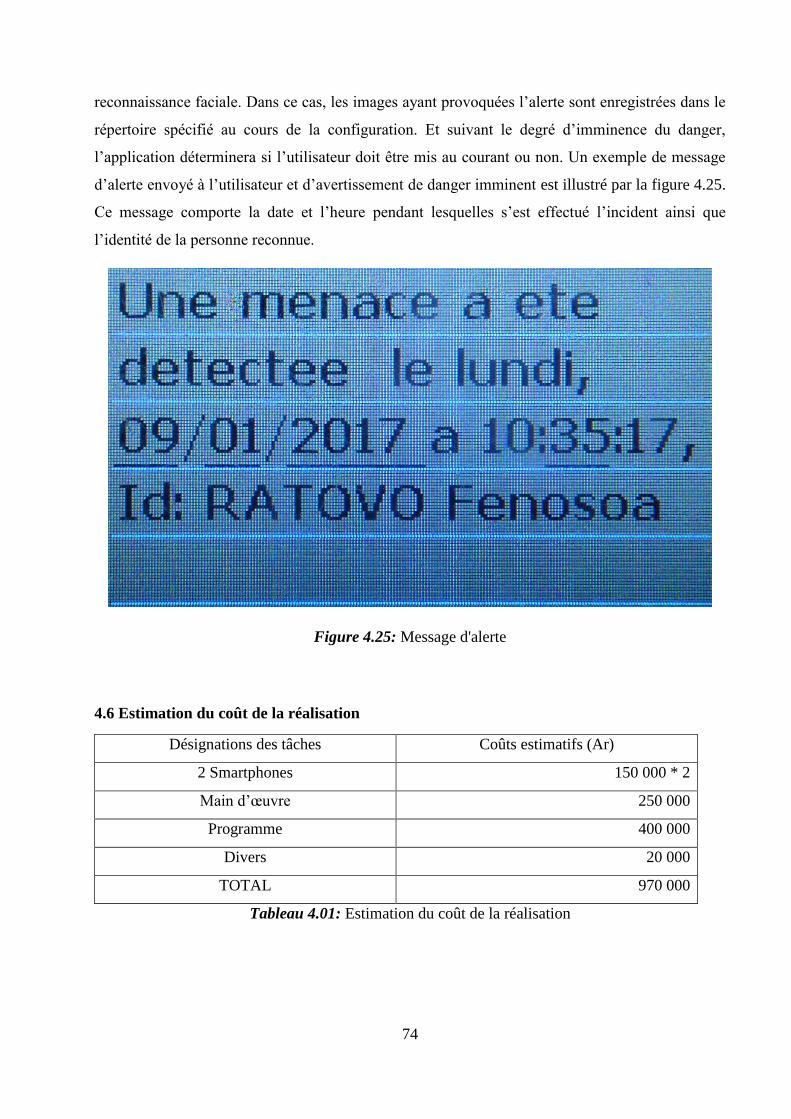
74
reconnaissance faciale. Dans ce cas, les images ayant provoquées l’alerte sont enregistrées dans le
répertoire spécifié au cours de la configuration. Et suivant le degré d’imminence du danger,
l’application déterminera si l’utilisateur doit être mis au courant ou non. Un exemple de message
d’alerte envoyé à l’utilisateur et d’avertissement de danger imminent est illustré par la figure 4.25.
Ce message comporte la date et l’heure pendant lesquelles s’est effectué l’incident ainsi que
l’identité de la personne reconnue.
Figure 4.25: Message d'alerte
4.6 Estimation du coût de la réalisation
Désignations des tâches Coûts estimatifs (Ar)
2 Smartphones 150 000 * 2
Main d’œuvre 250 000
Programme 400 000
Divers 20 000
TOTAL 970 000
Tableau 4.01: Estimation du coût de la réalisation

75
4.7 Conclusion
La notion de sécurisation nécessite une étude minutieuse des différents évènements qui peuvent se
produire. A chacun des sujets étudiés correspond une solution adéquate. Ainsi, l’obtention d’un taux
d’efficacité optimale requiert l’association de plusieurs techniques jouant, chacune d’elle, un rôle
bien précis mais complémentaire. La dernière étape de la sécurisation dépend de la prise de décision
effectuée par l’utilisateur.
76
CONCLUSION GENERALE
En guise de conclusion, ce système de télésurveillance constitue un moyen de lutte efficace contre
les divers problèmes liés à l’insécurité et aux vols. En effet, il offre un niveau de sécurisation élevé,
ne pouvant être atteint par n’importe lequel système de télésurveillance, en combinant à la fois les
méthodes de l’informatique et de la télécommunication. Cette particularité se définit par la présence
de trois méthodes fondamentales assurant la performance d’un tel système : la détection de
mouvement et la reconnaissance faciale servant l’identification des malfaiteurs et des incidents
survenus, le réseau GSM utilisé pour informer l’utilisateur ainsi que l’utilisation de caméras
permettant la visualisation en temps réel des différents évènements. Toutes ces méthodes étant
compatibles à la communication à distance, l’application assure la sécurisation du site même durant
un voyage ou un déplacement effectué par l’utilisateur. Les principaux avantages du langage Java,
utilisé pour la mise en place de ce projet, concernent le fait qu’il soit orienté objet facilitant ainsi le
déplacement d’un système informatique à un autre. Cette capacité à exécuter le même programme
sur de nombreux systèmes d’exploitation différents représente un atout majeur pour cette
application.
Cependant, malgré le haut niveau de sécurisation apporté par un système de télésurveillance, la
dernière décision restera toujours au niveau de l’utilisateur. Le temps d’application des différentes
solutions possibles suivant les problèmes encourus dépendra essentiellement des actions entreprises
par l’utilisateur.
Tout comme les logiciels et matériels de grandes marques, cette application peut, elle aussi, faire le
sujet de grandes améliorations telles que l’ajout d’une intelligence artificielle associée à une
technique de réalité augmentée assurant la simulation d’une présence humaine ainsi que la prise de
décision immédiate lors d’une alerte.
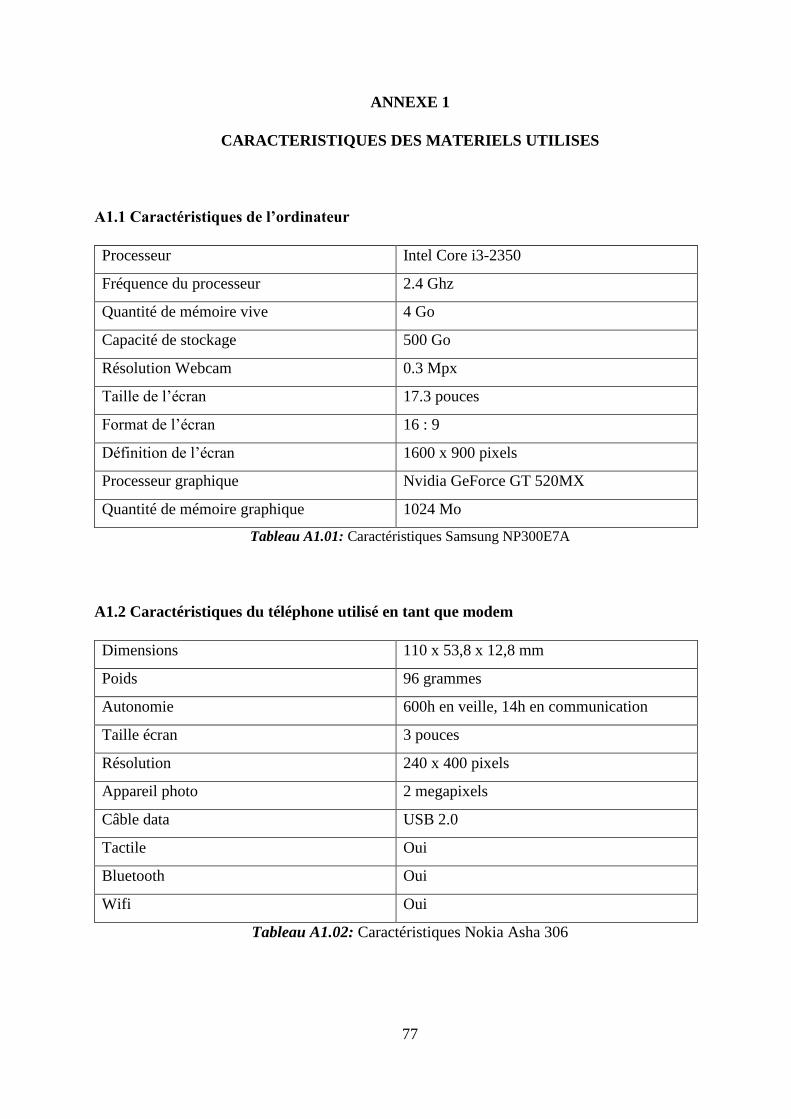
77
ANNEXE 1
CARACTERISTIQUES DES MATERIELS UTILISES
A1.1 Caractéristiques de l’ordinateur
Processeur Intel Core i3-2350
Fréquence du processeur 2.4 Ghz
Quantité de mémoire vive 4 Go
Capacité de stockage 500 Go
Résolution Webcam 0.3 Mpx
Taille de l’écran 17.3 pouces
Format de l’écran 16 : 9
Définition de l’écran 1600 x 900 pixels
Processeur graphique Nvidia GeForce GT 520MX
Quantité de mémoire graphique 1024 Mo
Tableau A1.01: Caractéristiques Samsung NP300E7A
A1.2 Caractéristiques du téléphone utilisé en tant que modem
Dimensions 110 x 53,8 x 12,8 mm
Poids 96 grammes
Autonomie 600h en veille, 14h en communication
Taille écran 3 pouces
Résolution 240 x 400 pixels
Appareil photo 2 megapixels
Câble data USB 2.0
Tactile Oui
Bluetooth Oui
Wifi Oui
Tableau A1.02: Caractéristiques Nokia Asha 306
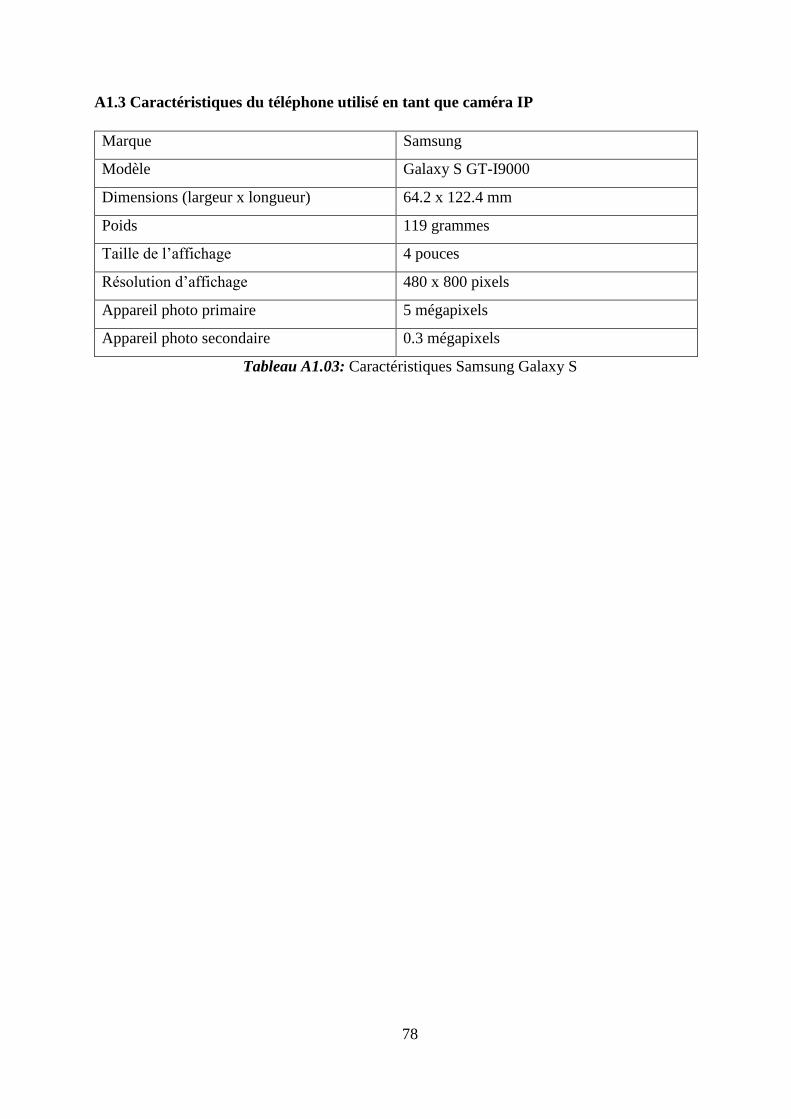
78
A1.3 Caractéristiques du téléphone utilisé en tant que caméra IP
Marque Samsung
Modèle Galaxy S GT-I9000
Dimensions (largeur x longueur) 64.2 x 122.4 mm
Poids 119 grammes
Taille de l’affichage 4 pouces
Résolution d’affichage 480 x 800 pixels
Appareil photo primaire 5 mégapixels
Appareil photo secondaire 0.3 mégapixels
Tableau A1.03: Caractéristiques Samsung Galaxy S
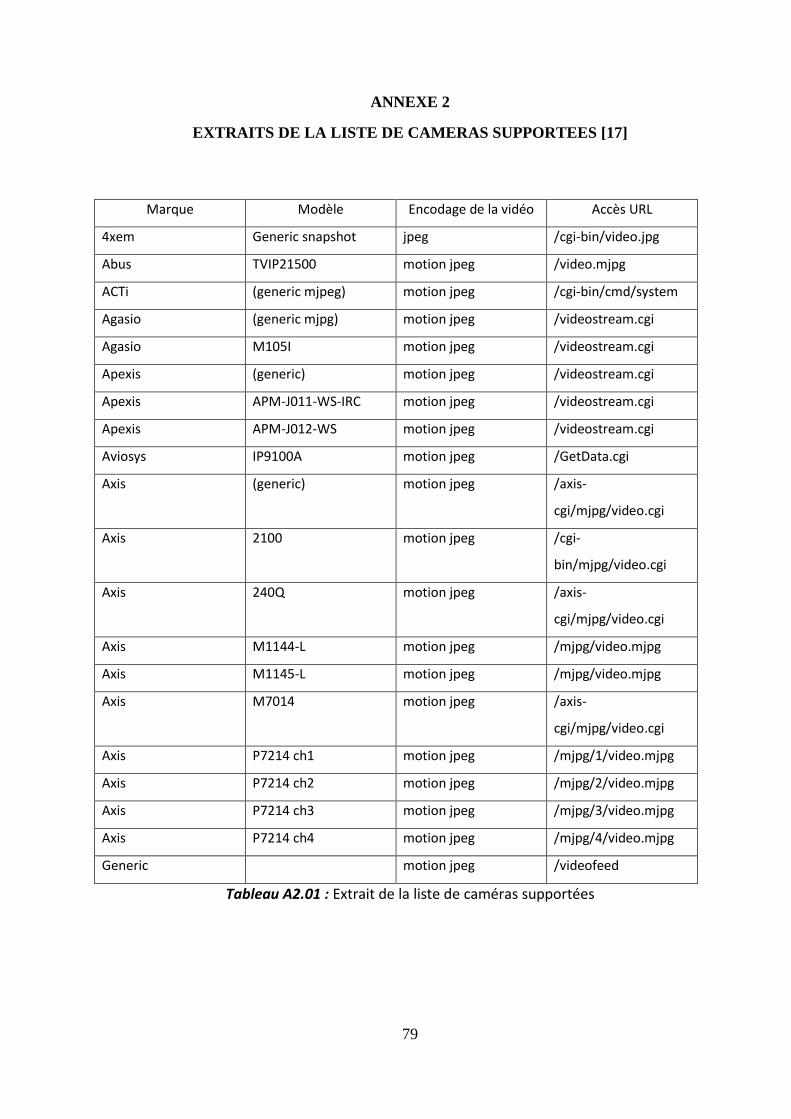
79
ANNEXE 2
EXTRAITS DE LA LISTE DE CAMERAS SUPPORTEES [17]
Marque Modèle Encodage de la vidéo Accès URL
4xem Generic snapshot jpeg /cgi-bin/video.jpg
Abus TVIP21500 motion jpeg /video.mjpg
ACTi (generic mjpeg) motion jpeg /cgi-bin/cmd/system
Agasio (generic mjpg) motion jpeg /videostream.cgi
Agasio M105I motion jpeg /videostream.cgi
Apexis (generic) motion jpeg /videostream.cgi
Apexis APM-J011-WS-IRC motion jpeg /videostream.cgi
Apexis APM-J012-WS motion jpeg /videostream.cgi
Aviosys IP9100A motion jpeg /GetData.cgi
Axis (generic) motion jpeg /axis-
cgi/mjpg/video.cgi
Axis 2100 motion jpeg /cgi-
bin/mjpg/video.cgi
Axis 240Q motion jpeg /axis-
cgi/mjpg/video.cgi
Axis M1144-L motion jpeg /mjpg/video.mjpg
Axis M1145-L motion jpeg /mjpg/video.mjpg
Axis M7014 motion jpeg /axis-
cgi/mjpg/video.cgi
Axis P7214 ch1 motion jpeg /mjpg/1/video.mjpg
Axis P7214 ch2 motion jpeg /mjpg/2/video.mjpg
Axis P7214 ch3 motion jpeg /mjpg/3/video.mjpg
Axis P7214 ch4 motion jpeg /mjpg/4/video.mjpg
Generic motion jpeg /videofeed
Tableau A2.01 : Extrait de la liste de caméras supportées
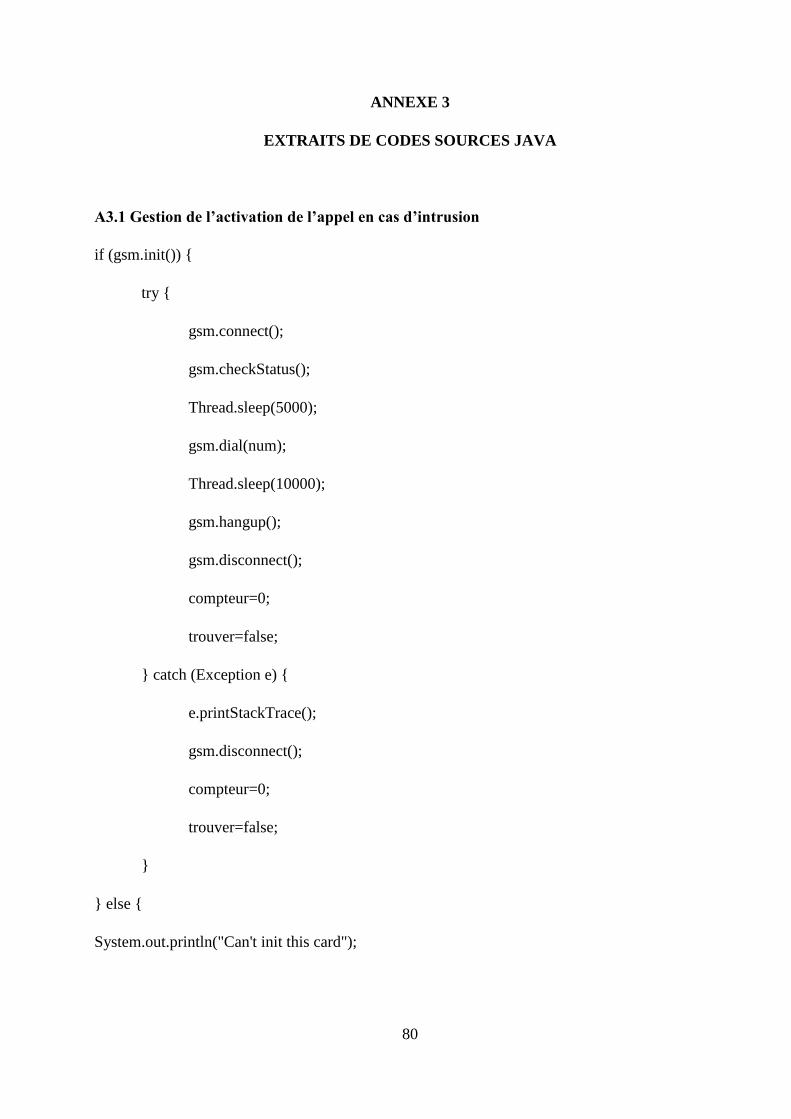
80
ANNEXE 3
EXTRAITS DE CODES SOURCES JAVA
A3.1 Gestion de l’activation de l’appel en cas d’intrusion
if (gsm.init()) {
try {
gsm.connect();
gsm.checkStatus();
Thread.sleep(5000);
gsm.dial(num);
Thread.sleep(10000);
gsm.hangup();
gsm.disconnect();
compteur=0;
trouver=false;
} catch (Exception e) {
e.printStackTrace();
gsm.disconnect();
compteur=0;
trouver=false;
}
} else {
System.out.println("Can't init this card");
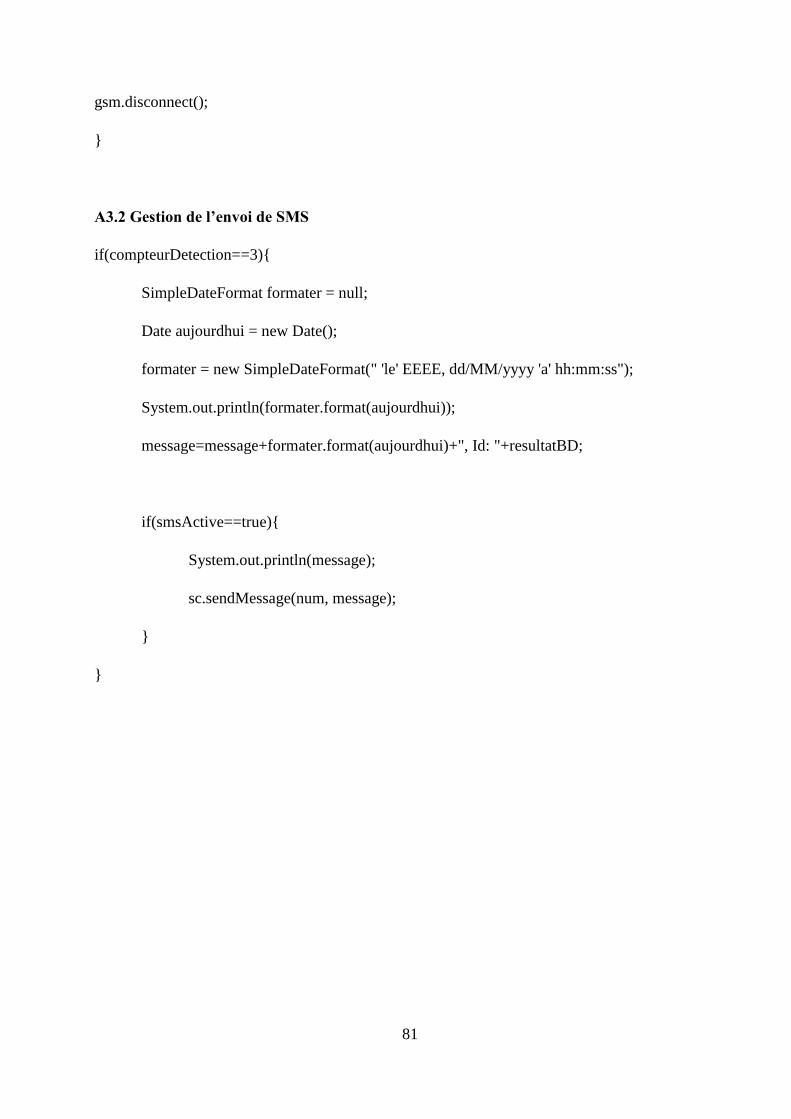
81
gsm.disconnect();
}
A3.2 Gestion de l’envoi de SMS
if(compteurDetection==3){
SimpleDateFormat formater = null;
Date aujourdhui = new Date();
formater = new SimpleDateFormat(" 'le' EEEE, dd/MM/yyyy 'a' hh:mm:ss");
System.out.println(formater.format(aujourdhui));
message=message+formater.format(aujourdhui)+", Id: "+resultatBD;
if(smsActive==true){
System.out.println(message);
sc.sendMessage(num, message);
}
}
82
ANNEXE 4
MISE EN PLACE DU SYSTEME DE TELESURVEILLANCE
A4.1 Etude des besoins
Avant toute installation, il convient de réaliser une étude des besoins afin que le système choisi
corresponde aux besoins recherchés. C’est lors de cette étude que plusieurs éléments doivent être
déterminés :
- Zones stratégiques à surveiller,
- Type de caméras à installer,
- Positionnement des caméras,
- Emplacement du poste de contrôle
Cette étude est indispensable avant toute installation de système de surveillance.
A4.2 Matériels nécessaires pour le système de surveillance
Celui-ci doit comprendre au minimum :
- Une ou plusieurs caméras couvrant les zones que vous souhaitez surveiller,
- Un appareil de gestion des images : ordinateur, tablette
- Un appareil de communication
- Un moniteur pour la visualisation des images.
On peut également remplacer le moniteur par l’écran d’un ordinateur ou d’un Smartphone.
A4.3 Description des prestations et des avantages
- Gestion des alarmes pour les intrusions
- Sauvegarde des preuves en images

83
- Ajout d’un système de reconnaissance faciale
- Mise au courant du propriétaire lors d’un danger
- Possibilité d’utilisation de caméras multiples
- Meilleure prise en main de l’application
84
BIBLIOGRAPHIE
[1] « Vidéosurveillance », http://fr.wikipedia.org/wiki/Vidéosurveillance, Janvier 2017.
[2] « Fonctionnement d’un système de vidéosurveillance », http://www.conseil-
videosurveillance.fr, Janvier 2017.
[3] L. Beddiaf, « VIDEOSURVEILLANCE : Principes et technologies », 2008.
[4] « Image numérique », http://fr.wikipedia.org/wiki/Image_numérique, Novembre 2014.
[5] « Le modem », http://www.commentcamarche.net/contents/753-le-modem, Février 2015.
[6] « Universal Serial Bus », https://fr.wikipedia.org/wiki/Universal_Serial_Bus, Janvier 2017
[7] « USB », http://www.commentcamarche.net/contents/773-usb, Février 2015.
[8] «Bluetooth», http://www.commentcamarche.net/contents/108-bluetooth-comment-ca-marche,
Janvier 2017.
[9] J.P. Muller, « Bluetooth », Janvier 2015.
[10] « Wi-Fi », http://fr.wikipedia.org/wiki/Wi-Fi, Février 2015.
[11] L. Baysse, « Le WiFi », Juillet 2005.
[12] J.P. Muller, « Le réseau GSM et le mobile », Juillet 2002.
[13] « Short Message Service », http://fr.wikipedia.org/wiki/Short_Message_Service, Février 2015.
[14] D.E. Butler, V.M. Bove, S. Sridharan, « Real-Time Adaptive Foreground/Background
Segmentation », Novembre 2004.
[15] « Méthode de Viola et Jones »,https://fr.wikipedia.org/wiki/Méthode_de_Viola_et_Jones,
Janvier 2017.
[16] Y.Q. Wang, « An Analysis of the Viola-Jones Face Detection Algorithm », 2014.
[17] « Supported Cameras, NVRs & DVRs », https://www.mangocam.com/help/supported-cameras,
2014.
85
FICHE DE RENSEIGNEMENTS
Nom : RATOVO
Prénom : Fenosoa
Adresse de l’auteur :
Lot II H 5 Faravohitra
ANTANANARIVO 101
MADAGASCAR
E-mail : [email protected]
Téléphone : 033 06 682 55
Titre du mémoire :
« SYSTEME DE SURVEILLANCE A DISTANCE IMPLEMENTANT LA
RECONNAISSANCE FACIALE ET LA DETECTION DE MOUVEMENT »
Nombre de pages : 85
Nombre de figures : 51
Nombre de tableaux : 6
Directeur de mémoire :
M. ANDRIAMIASY Zidora, Maître de Conférences,
Adresse e-mail : [email protected]
Téléphone : 033 11 874 78

RESUME
Actuellement, les problèmes de sécurité et de délit font partie de la vie quotidienne de chaque
individu. Jour après jour, la population vit dans la frustration et l'inquiétude d'être la prochaine cible
des actes de violence. La solution la plus efficace face à ces sujets se focalise principalement sur
deux faits fondamentaux. La première se traduit par l'étude des différents problèmes se présentant,
la recherche d'une solution adéquate, et la combinaison de toutes les solutions trouvées au sein d'une
seule méthode pour former la solution fondamentale. La seconde est la plus importante car elle se
base surtout sur la prise de décision de l'utilisateur. La concrétisation des objectifs du système de
sécurisation dépend essentiellement du choix effectué par ce dernier. Partant de ce principe,
l’application mise en place fait intervenir trois moyens permettant la résolution de différents
problèmes, à citer : l’utilisation du réseau de la téléphonie mobile, la possibilité d’évolution en
fonction des avancées technologiques, et la résolution des problèmes en relation avec la distance.
Mots clés : Télésurveillance, Sécurité, Reconnaissance faciale, Détection de mouvement, Image
ABSTRACT
Nowadays, the problems of security and offence are a part of the everyday life. Day after day, people
live in the frustration and the concern to be the next target of acts of violence. The most effective
solution addressing these issues is primarily based on two fundamental facts. The first one concerns
the study of the various cases that can occur, the search for an adequate solution, and the
combination of all the solutions within a single method to form the fundamental solution. The
second one is the most important because it focuses on the decision of the user. The realization of
the objectives of the security system depends essentially on the choice made by the latter. On this
basis, the application implementation involves three ways to solve different problems, including the
use of the mobile network, the ability to change as technology advances, and the possibility to solve
problems related with distance.
Keywords : Remote Monitoring, Security, Facial recognition, Motion detection, Picture