Embed Size (px)
Citation preview
TD-Asservissement - Page 1 -
SI
Correction Exercice1 : 1 Etude dynamique dv= (U-Us) dt S dY = dv d’où SdY = (U-Us) dt
Il vient S dY/dt + = U Equation différentielle linéaire du premier ordre. 2 Etude Statique :
U= ou bien Y= R2U2 La pente de la tangente en M0 représente le gain statique K en ce point.
K= =2 R2U0 A condition de rester dans le voisinage de M0 on pourra considérer que (Y-Y0)=K( Us-U0) 3 Etude des petites variations autour du point de repos. Réécrivons la relation SdY = (U-Us) dt qui traduit l’évolution du niveau pendant un temps dt et en tenant compte des nouvelles notations : S dy/dt= (U0+u-Us) =(u-(Us-U0) Comme on s’éloigne peu du point de repos (hypothèse) on peut remplacer la quantité ( Us-U0)par son expression linéarisée obtenue à la question précédente : ( Us-U0)= (Y-Y0)/K=y/K
Il vient alors S dy/dt + = u équation différentielle linéaire à coefficients constants du premier ordre. Exercice 2 : Créneau infini Le signal f(t) est formé d’une infinité de créneaux élémentaire g(t) décalés temporellement d’une période T. Le signal g(t) est formé d’un échelon unité u(t) auquel on soustrait un échelon décalé u(t-T/2)=uT/2
g=u-uT/2
g(t) a pour transformée de Laplace :
G(p)= L {g(t)}= L {u(t)}- L {u(t-T/2)}=1/p - e-Tp/2 /p
G(p) = Signal infiniment répété On peut exprimer f(t) en fonction de g(t) de la manière suivante : f(t) = g(t) + g(t-T) + g(t-2T)+….. n peut alors calculer F(p) : F(p) = G(p) + e-Tp G(p) + e-2Tp/ G(p)+….. F(p) = G(p) (1+ e-Tp + e-2Tp/ +…..) Il reste à déterminer le terme : (1+ e-Tp + e-2Tp/ +…..) C’est une progression géométrique de raison e-Tp dont la somme des n premiers termes vaut
Alors : (1+ e-Tp + e-2Tp/ +…..)= { } =

TD-Asservissement - Page 2 -
SI
g1 T T/
F(p) = La transformée de Laplace d’un signal infiniment répété est égale à la transformée de Laplace de ce signal divisé par (1 - e-Tp)
En remplaçant G(p) par sa valeur calculée on obtient
F(p) = avec changement de variable T0=T/2
Exercice 3 : signal en dent de scie. Le signal f(t) est formé d’une infinité de signaux élémentaires décalé temporellement d’une période T.
Le signal g(t) est formé de plusieurs rampes décalées.
G(t)= t u(t) - (t-T/2)u((t-T/2) + (t-T)u(t-T)
Et la transformée de Laplace vaut : G(p) = - +
G(p) =
TD-Asservissement - Page 3 -
SI
Signal infiniment répété : En vertu de l’exercice précédent
F(p) = = x = x Exercice 4 : signal en dent de scie.
F(p) = x
TD-Asservissement - Page 4 -
SI
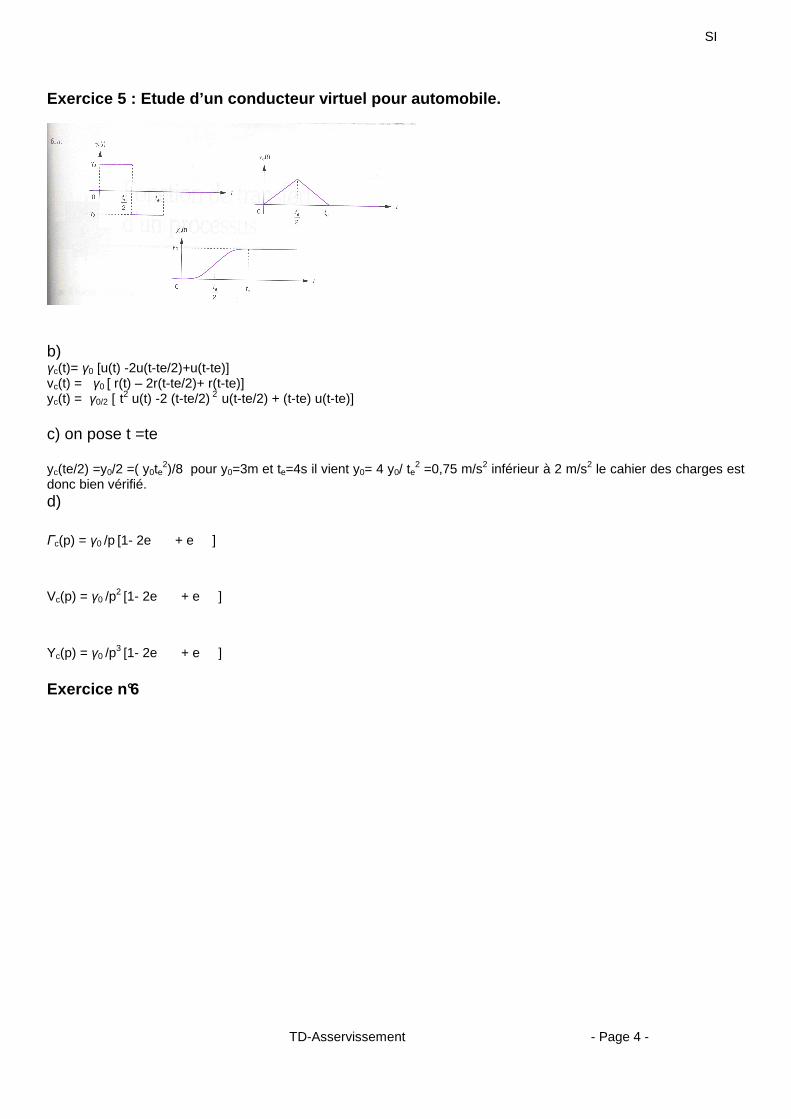
Exercice 5 : Etude d’un conducteur virtuel pour aut omobile.
b) γc(t)= γ0 [u(t) -2u(t-te/2)+u(t-te)] vc(t) = γ0 [ r(t) – 2r(t-te/2)+ r(t-te)] yc(t) = γ0/2 [ t2 u(t) -2 (t-te/2) 2 u(t-te/2) + (t-te) u(t-te)] c) on pose t =te yc(te/2) =y0/2 =( y0te
2)/8 pour y0=3m et te=4s il vient y0= 4 y0/ te2 =0,75 m/s2 inférieur à 2 m/s2 le cahier des charges est
donc bien vérifié. d)
Γc(p) = γ0 /p [1- 2e + e ]
Vc(p) = γ0 /p2
[1- 2e + e ]
Yc(p) = γ0 /p3
[1- 2e + e ] Exercice n°6
TD-Asservissement - Page 5 -
SI
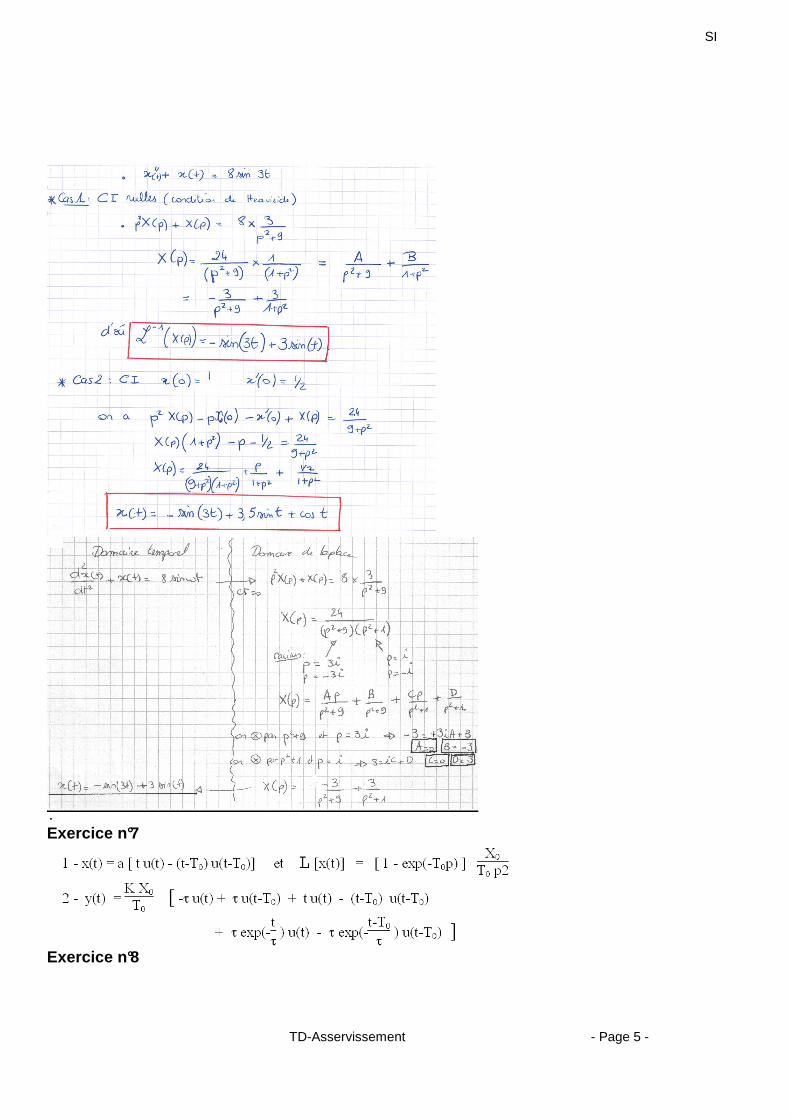
. Exercice n°7
Exercice n°8
TD-Asservissement - Page 6 -
SI

TD-Asservissement - Page 7 -
SI
Exercice n°9 Exercice n°10 1 - i1 R1 = e - s i2 = C (e - s) ( i1 + i2 ) R2 = s 2 - I1 R1 = E - S I2 = C p (E - S) (I1 + I2) R2 = S 3 - G(p) = = 4 - e(t) = a [ t u(t) - 2 (t -T0) u(t -T0) + (t -2T0) u(t -2T0)] et E(p) = [ 1 - 2 exp(-T0p) + exp(-2T0 p) ]
5 - s(t) = [ t u(t) - 2 (t -T0) u(t -T0) + (t -2T0) u(t -2T0) ] + [ u(t) - 2 u(t -T0) + u(t -2T) ] - [ exp(-2t) u(t) - 2 exp[-2(t -T0)] u(t -T0) + exp[-2(t -2T0)] u(t -2T0) ] Exercice n°11 1 - G(p) = avec K = 2,5 cm/V et τ = 0,127 s 2 - y(t) = K V0 [ 1 - exp(-) ] y(t) = 0,95 y(∞) pour t voisin de 3τ 3 - H(p) = 4 - H(p) = G(p) C(p) C(p) = 5 - v(t) = V0 [ 1 + exp(-) ] u(t) Lorsque la consigne est un échelon de 4 V, il est envoyé à l’enregistreur un signal de 8 V qui le fait démarrer deux fois plus vite. Ce signal décroît ensuite jusqu'à 4 V. Le temps de réponse pour y(t) est deux fois plus court.

TD-Asservissement - Page 8 -
SI
Exercice n°12
1 − ψ(∞) = K U0
2 - Si K est multiplié par 0,9, alors y(∞) est multiplié par 0,9 aussi. 3 - H(p) = 4 - A = = 5 5 - Si K est multiplié par 0,9, alors y(∞) est multiplié par 0,98. Le vieillissement est moins sensible.





























