Embed Size (px)
Citation preview
1
Télémétrie
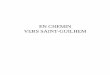
La télémétrie laser permet d’accéder à l’éloignement d’un objet pour des distances allant de ladizaine de mètres à plusieurs dizaines de kilomètres. L’intérêt du rayonnement laser pourmesurer de telles distances n’est pas à priori évident. Il est bien connu que les ondes radars(longueur d’onde de l’ordre du cm) sont bien moins atténuées par l’atmosphère que les ondesoptiques (longueur d’onde de l’ordre du µm). Lorsque la mesure doit être associée àl’identification de la cible par un système de vision, il suffit d’avoir une portée de l’ordre degrandeur de la distance de vision. Il est alors possible d’utiliser la même gamme de longueurd’onde, c’est à dire micrométrique. Les systèmes radars à onde centimétriques sont de plustrès sensibles aux échos parasites du relief. Ceux-ci affectent les mesures sol-sol et air-sol (lacible étant au sol). La très grande directivité du faisceau laser permet d’autre part desélectionner l’objet dont on veut connaître la distance de manière très précise, sans être gênépar les obstacles autres que ceux étant exactement dans la ligne de visée.Les deux méthodes ayant donné lieu à des dispositifs commerciaux sont la télémétrieimpulsionnelle et par comparaison de phase.La télémétrie impulsionnelle consiste à envoyer une impulsion de lumière très courte etpuissante, puis à mesurer la durée de son aller retour sur un objet diffusant ou réfléchissant.La rapidité de la mesure (inférieur à la milliseconde) lui a valu, malgré une précisionmédiocre (de l’ordre du mètre), un développement particulier dans le domaine militaire. Dansce domaine, la première étape est la détection de la cible. Elle se fait par un système devision (qui fera l'objet d'une présentation ISL): lunettes associées à des intensificateursd’images, caméras infrarouges… Une fois la cible identifiée, l’opérateur se sert du système devision pour orienter l’impulsion laser télémétrique. L’intervalle de temps séparant l’envoi del’impulsion de son écho fournit la distance. Cette donnée, ajoutée à celles obtenues par lesystème de vision, détermine totalement la position de la cible. Le niveau d’automatisation dela procédure dépend des équipements. Dans le cas de jumelles télémétriques pour fantassins,la distance est seulement affichée. Dans les systèmes plus lourds pouvant équiper chars etavions, l’ensemble des opérations est totalement automatique : de l’identification de la cible, àl’orientation des systèmes de tirs.Pour être opérationnel, un télémètre militaire doit avoir une portée au moins égale à celle dessystèmes de vision. La réalisation de cette condition, pour toutes conditions météorologiques,doit faire face à de nombreux obstacles : le rayonnement laser est absorbé et perturbé parl’atmosphère, les conditions météorologiques n’influent pas de la même façon sur lesperformances du système de vision et sur l’absorption de l’impulsion, la fraction de l'énergielumineuse incidente renvoyée vers l’émetteur dépend fortement de la nature de la cible.(voir illustrations ci-dessous)
2
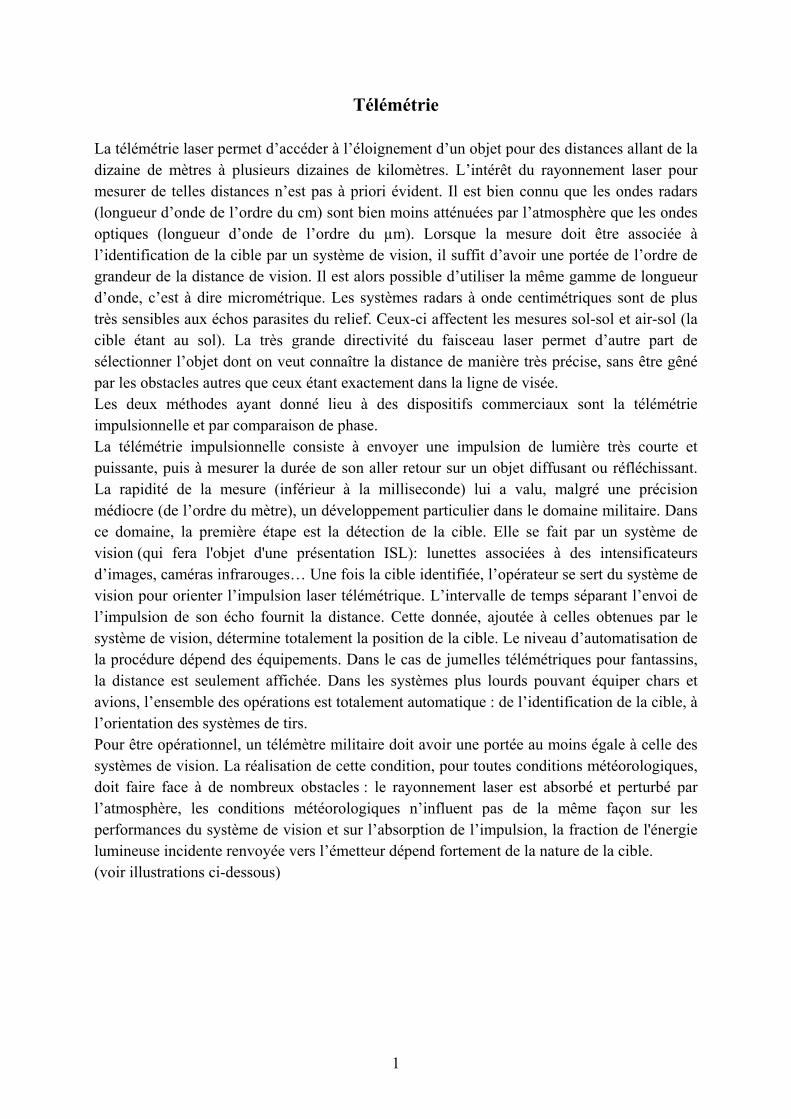
Illustration du coefficient de réflexion en fonction de λ la longueur d'onde
No optical filterOptical filter 1
400 / 500 nm
Optical filter 2
700 / 900 nmNo optical filter
Optical filter 1
400 / 500 nm
Optical filter 2
700 / 900 nm
400 500 600 8007000
10
20
30
40
50
60
70
80
90
Reflectance %
λ nm
Water
Tarred road
Paving-stone roadDry grasslandWet sand
Granite
GrasslandForest (autumn)
Recent snow
Chalk
3
Les conditions de sécurité du manipulateur du télémètre doivent être également prises encompte. Il peut recevoir une impulsion laser retour dangereuse dans le cas d’une cible procheet d’une atmosphère claire.La télémétrie par comparaison de phase utilise un faisceau laser continu modulésuccessivement à des fréquences différentes. Les mesures des déphasages entre l’onde émiseet réfléchie par l’objet permet d’obtenir la valeur de la distance. La précision obtenue estnettement supérieure à celle obtenue par l’autre méthode (de l’ordre du mm par kilomètremesuré). La saisie des données demande par contre plusieurs secondes. De plus la faiblepuissance des lasers continus, par rapport aux lasers impulsionnels, nécessite l’utilisation decibles coopératives conçues pour renvoyer une grande partie de la lumière reçue dans ladirection d’émission. Le domaine d’application de cette méthode est essentiellement celui desmesures topographiques.
Télémétrie impulsionnelle
Le principe de base de la télémétrie impulsionnelle est particulièrement simple. L’étude seconsacrera essentiellement sur quelques unes des nombreuses difficultés pratiques de mise enœuvre. Un certain nombre d’aspects techniques intervenant souvent dans d’autres typesd’applications seront décrits ici : incertitudes relatives à la numérisation d’une mesure (partie1), atténuation d’un faisceau laser par propagation dans l’atmosphère et réflexion sur unecible (2), réduction de la divergence du faisceau à l’émission (3.a), problèmes relatifs à laréception du signal (3.b).
1. Présentation du schéma de principe
Figure 1 : Schéma de principe du télémètre
4
La mesure commence par le déclenchement de l’impulsion lumineuse obtenue à partir dusystème de commande (actionné par l’opérateur). La forme temporelle de l’impulsion laserémise est donnée sur la figure 2. La puissance maximale P0 est atteinte au bout d’un temps demontée τm, la durée totale de l’impulsion est τ.
Figure 2 : Allure temporelle de l’impulsion laser émise
La réception d’une partie de l’impulsion sur le photorécepteur 1 (constitué d’une photodiode àavalanche suivi d’un système amplificateur adapté) fournit une tension s1(t). Le compteur estactivé dès que s1(t) atteint s0. De la même façon l’impulsion rétro diffusée inhibe le compteurlorsqu’elle parvient au photorécepteur 2.
Figure 3 : Principe de l'activation du compteur
1.a Structure des prismes déviateurs
Les prismes déviateurs à 90° utilisés comportent un angle droit. La lumière tombenormalement sur l’une des faces selon le schéma de la figure 1. L’angle au sommet et l’indiceminimum de ces prismes est déterminé de la façon suivante :
5
Figure 4 : prisme à réflexion totale
1.b Durée de l’aller retour de l’impulsion, distance
L’émetteur est placé le plus près possible du récepteur afin de réduire les dimensions dusystème. Le trajet du premier prisme déviateur au photorécepteur 1, ainsi que les variations duchemin dues aux optiques de réception sont négligés tout au long de l’étude.La durée tc de l’aller-retour de l’impulsion en fonction de la distance d est donné par :
1.c Lien entre l’incertitude de la mesure et la fréquence de l’horloge
L’horloge émet un signal carré à f=100 MHz. Chaque front montant du signal carréincrémente le compteur d’une unité lorsque celui-ci est activé.
Figure 5 : Fréquence d’horloge
La distance minimale affichable par le système est donnée par :
Distinguons 2 cas :
6
Cas 1: Le signal de retour apparaît juste après le front montant soit une distance quasi nulle.Comme le front montant apparaît entre l’activation et l’arrêt du compteur la distance affichéeest de
Figure 6 : Incertitude inhérente au comptage
Cas 2 : Il n’y a pas de front montant entre l’activation et l’arrêt du compteur soit
On voit aussi que plus la fréquence d’horloge est grande, plus l’incertitude sur la mesure estfaible. Cette propriété a cependant des limites par exemple lors de conditions météorologiquesdégradées (brouillard, pluie, tempête de sable ou de neige,…).Plaçons nous dans le cas de la mesure d’une distance d par temps clair et par temps brumeux.Le signal s2(t) est proportionnel à la puissance de retour Pr(t) (figure 3), soit :
L’arrêt du compteur se fait à s0 d’où la valeur de
Analysons maintenant le signal de retour pour différentes conditions météorologiques. Onvoit sur la figure 7 que le signal est atténué par temps de brouillard. Le temps de monté τm estidentique à celui de l’impulsion émise, la propagation dans l’atmosphère ne modifie pas laforme temporelle du signal mais atténue uniquement son intensité.
Figure 7 : Incertitude due à l’atténuation de l’impulsiont0 est l’instant d’arrivée de l’impulsion de retour sur le photodétecteur 2. Pour une distance d,l’incertitude sur l’instant de détection due à la différence d’amplitude de l’impulsion est égaleà ∆t. La limite de détection dans le brouillard se situe pour.L’incertitude sur la distance sera donc
7
Pour avoir la même incertitude que pour une fréquence d’horloge de 100 MHz, le temps demontée de l’impulsion laser doit être :Cet exemple montre que si l’on veut diminuer les incertitudes de mesure il faut utiliser deslasers ayant des impulsions très courtes et une fréquence d’échantillonnage de signal élevéesans pour autant dépasser l’inverse du temps de montée de l’impulsion laser.
1.d Caractéristiques de l’impulsion lumineuse
Les données ci-dessous décrivent divers modes de fonctionnement possibles d’un laserNd :YAG (longueur d’onde de 1,064 µm).
• Mode continu : émission d’un faisceau continu de puissance 20W• Mode relaxé : Impulsion unique avec un temps de montée de 10 µs, une durée totale
de 200 µs et une énergie de 1 Joule. Le taux de répétition maximum possible est de 5Hz.
• Mode déclenché 1 : impulsion unique d’environ 10 ns, l’énergie par impulsion est de0,1 J, le taux de répétition est de 10 Hz.
• Mode déclenché 2 : impulsion d’environ 100ns, l’énergie par impulsion est de 10-3 J,Le taux de répétition est de 10 kHz
• Modes couplés : série d’impulsions de durée de l’ordre de la picoseconde chacunerégulièrement espacées de 20 ps, , énergie par impulsion d’environ 1mJ.
Avec les valeurs suivantes déterminons quel est le mode de fonctionnement du laserNd :YAG répondant aux conditions de fonctionnement du télémètre :La puissance lumineuse à l’entrée du télémètre (sur la lentille d’entrée de l’optique deréception) minimale nécessaire pour activer le compteur est de Prm=100nW,Lors de son retour sur le télémètre le signal laser subit une atténuation κ = 10-10.
•
•
•
•

8
•
2 Equations de liaison
2.a Cas où la totalité du faisceau est intercepté par la cible
Figure 8 : Rétrodiffusion de l’impulsion
Le flux émis Ie en [W.sr-1] par une source S est donné par :
(e1)
avec dΩ : angle solide sous lequel est vu la surface A depuis la surface S
(e2)
La luminance Le en [W.m-2.sr-1] d'une source est donnée par la relation :
(e3)
Si S est un diffuseur Lambertien son exitance Me en [W.m-2] est donnée par :
(e4)
or si une surface S est éclairée par un laser de puissance P, cette surface va réémettre cettepuissance avec un coefficient de réflexion R ou albedo dépendant de sa nature.d'où :
(e5)avec :
En combinant (e4) et (e5) on obtient :
9
(e6)
En remplaçant (e6) dans (e3), on obtient :
(e7)
d'après (e1) : , d'où (e7) : , avec , d'où :
(e8)
l'éclairement énergétique E en [W.m-2] d'une surface réceptrice est donné par :
(e9)
(e8) dans (e9) donne :
(e10)
La puissance Pr en [W] collectée par la surface A devient :
(e11)
2.b Cas où les dimensions de la cibles sont inférieures à celles de la totalité du faisceau
Figure 9 : Portion de la cible interceptée
La cible réémettra dans le rapport des surfaces, l'exitance de la source devient :
(e12)
avec l'angle solide Ω' ≈πθ², la puissance Pr collectée par la surface A du télémètre devient :
(e13)
10
L’équation ci-dessus montre que lorsque la cible est plus petite que la divergence du faisceau,il est important d’avoir un angle θ faible soit une divergence de laser faible.
2.d Portée du télémètre
Parmi les différentes causes d’absorption du rayonnement, celle due aux composants présentsde l’atmosphère (CO2, CO, vapeur d’eau…) dépend fortement de la longueur d’onde. Voirfigure 1 de l’introduction.D’autres causes d’origine atmosphériques peuvent perturber la libre propagation du faisceaucomme les poussières, les aérosols, les brumes ou les nuages d’insectes qui diffusent lefaisceau.En prenant en considération les conclusions du paragraphe 1.d c’est à dire de disposerd’impulsions courtes et intenses (quelques dizaines de ns et quelques kW de puissance crête)ainsi que des longueurs d’ondes correspondants à des fenêtres de transparence del’atmosphère, le nombre de lasers disponibles commercialement pour des applications entélémétrie sont limités. De plus la source laser doit être peu encombrante, fiable et d’un coûtraisonnable.
Comme illustré au paragraphe 1.d, le laser Nd :YAG déclenché, émettant à 1,064µm est trèslargement utilisé, on peut aussi citer le laser CO2 à tube scellé qui émet à 10,6 µm. Bien queles performances des lasers à semi conducteurs émettant entre 800 et 950 nm n’égales pasencore celles des deux autres lasers cités précédemment, on trouve de plus en plus ce type delasers sur des télémètres de portée dépassant plusieurs kilomètres (voir modèle ISL). D’autrestypes de lasers tels que les lasers à fibre sont utilisés dans la bande spectrale dite à sécuritéoculaire au delà de 1,55 µm.
Analysons les deux laser Nd :YAG et CO2 :
La figure 10 représente l’atténuation du rayonnement en fonction de la visibilité pour λ =1,064 µm et λ = 10,6 µm pour des conditions météorologiques différentes.
Figure 10 : Dépendance de l’atténuation avec la visibilité
11
Les 4 points remarquables sont les suivants :
• 1) Visibilité 1 km ; λ = 1,064 µm : Coefficient d’atténuation α = 1,727 km-1
• 2) Visibilité 1 km ; λ = 10,6 µm : Coefficient d’atténuation α = 0,691 km-1
• 3) Visibilité 10 km ; λ = 1,064 µm : Coefficient d’atténuation α = 0,046 km-1
• 4) Visibilité 10 km ; λ = 10,6 µm : Coefficient d’atténuation α = 0,115 km-1
Ces valeurs montrent que par mauvaise visibilité (temps de brume), le rayonnement du laserCO2 moins atténué, est préférable.En utilisant les données numériques suivantes P=10MW, R=0,8, Ar=10-2m², Prm=100 nW,θ=0,1 mrd, déterminons la portée du télémètre pour une cible de surface équivalente de S =0,5 m² et pour les deux types de laser.
Si la cible est circulaire son diamètre D est donné par : soit : D=0,8 mLa divergence du laser est de , la cible est couverte par le faisceau laser à unedistance d telle que : soit .Pour d ≤ le faisceau laser recouvre entièrement la cible, toute la puissance du laser estrétro diffusé par la cible, c’est donc l’équation (e11) qui sera utilisée. Pour d > seule unepartie de la puissance laser sera réfléchie par la cible, la portée sera calculée à partir del’équation (e13).
La condition pour qu’il y ait détection est la suivante :
L’application numérique donne les valeurs suivantes pour les 4 cas :
• • • •
On remarque que la condition „portée supérieure à la visibilité“ est vérifiée dans trois cas surquatre. Le laser CO2 est mal adapté aux atmosphères claires, pour une cible de 0,5 m² desurface, il faut augmenter la puissance du faisceau laser au delà de 10 MW. Cette voie a 2inconvénients, l’augmentation de la puissance laser se fait au détriment de l’encombrement,de la consommation électrique, l’autre aspect négatif de l’augmentation de la puissance dulaser est le danger que représente l’utilisation d’un laser puissant.Il existe une autre voie tout aussi efficace et beaucoup moins problématique c’est d’augmenterla surface A de l’optique de réception. Pour cela, il est intéressant d’utiliser des optiques avecla plus grande ouverture possible.
3 Rôle des optiques d’émission et de réception
3.a Rôle de l’optique d’émission
12
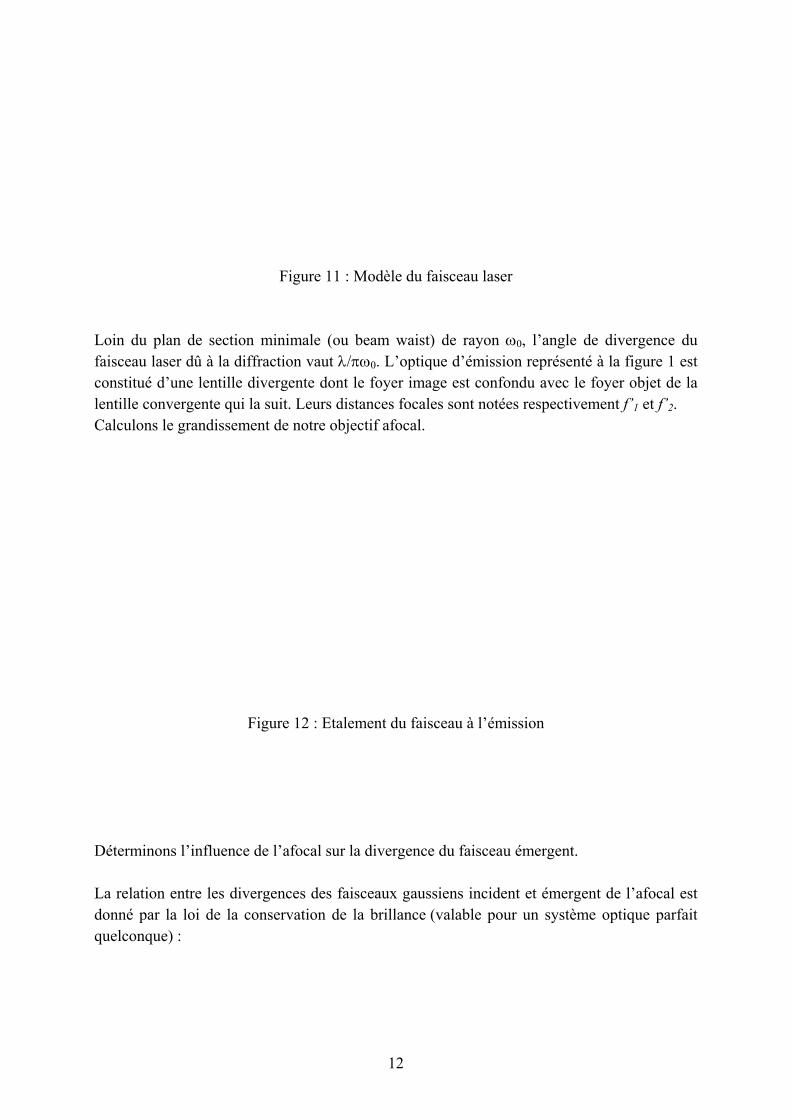
Figure 11 : Modèle du faisceau laser
Loin du plan de section minimale (ou beam waist) de rayon ω0, l’angle de divergence dufaisceau laser dû à la diffraction vaut λ/πω0. L’optique d’émission représenté à la figure 1 estconstitué d’une lentille divergente dont le foyer image est confondu avec le foyer objet de lalentille convergente qui la suit. Leurs distances focales sont notées respectivement f’1 et f’2.Calculons le grandissement de notre objectif afocal.
Figure 12 : Etalement du faisceau à l’émission
Déterminons l’influence de l’afocal sur la divergence du faisceau émergent.
La relation entre les divergences des faisceaux gaussiens incident et émergent de l’afocal estdonné par la loi de la conservation de la brillance (valable pour un système optique parfaitquelconque) :
13
A.N. : Le faisceau du laser Nd:YAG a une divergence naturelle de 0,5 mrd. Il passe à traversun afocal dont la focale des lentilles sont égales à : f’1=-5 cm et f’2=25 cm.La divergence à la sortie de l’afocal passe à :
La réduction de la divergence du faisceau permet d’augmenter la portée du télémètre dans lecas où la dimension de la cible est inférieure à celle du faisceau (voir paragraphe précédent).Cependant la divergence ne peut être réduite indéfiniment à cause de problèmes dus à la foisau pointage et surtout aux vibrations inévitables du support du télémètre.
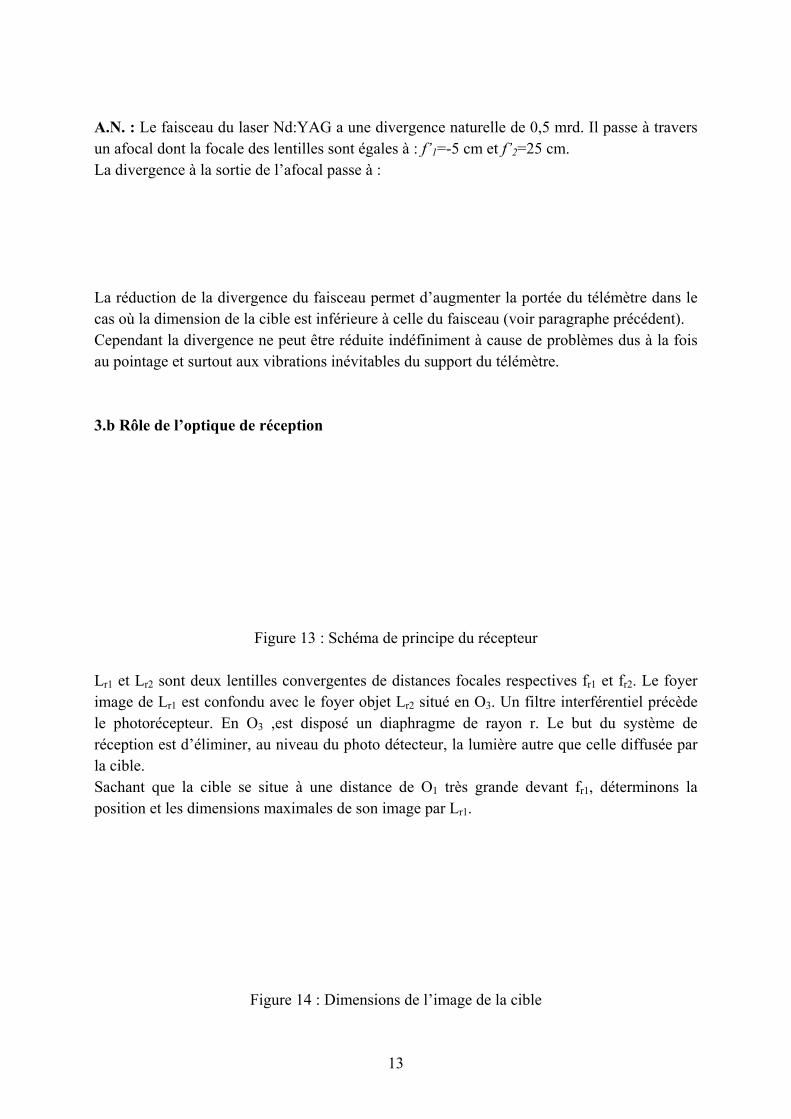
3.b Rôle de l’optique de réception
Figure 13 : Schéma de principe du récepteur
Lr1 et Lr2 sont deux lentilles convergentes de distances focales respectives fr1 et fr2. Le foyerimage de Lr1 est confondu avec le foyer objet Lr2 situé en O3. Un filtre interférentiel précèdele photorécepteur. En O3 ,est disposé un diaphragme de rayon r. Le but du système deréception est d’éliminer, au niveau du photo détecteur, la lumière autre que celle diffusée parla cible.Sachant que la cible se situe à une distance de O1 très grande devant fr1, déterminons laposition et les dimensions maximales de son image par Lr1.
Figure 14 : Dimensions de l’image de la cible
14
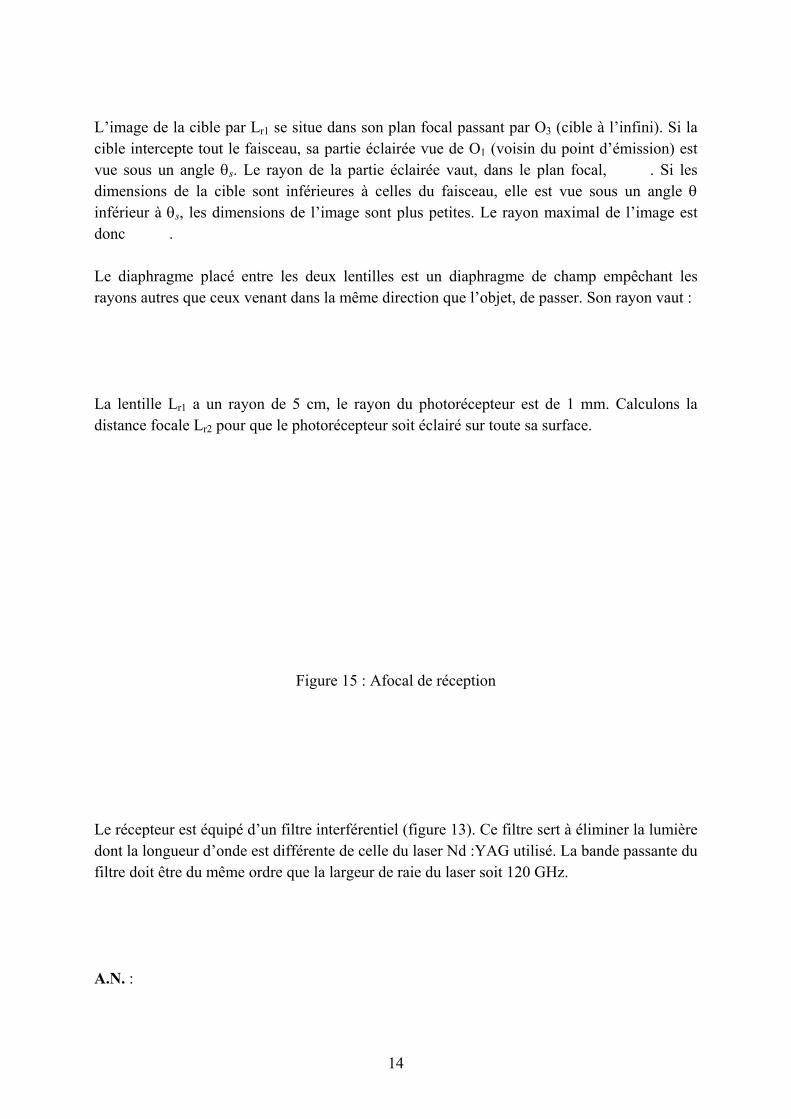
L’image de la cible par Lr1 se situe dans son plan focal passant par O3 (cible à l’infini). Si lacible intercepte tout le faisceau, sa partie éclairée vue de O1 (voisin du point d’émission) estvue sous un angle θs. Le rayon de la partie éclairée vaut, dans le plan focal, . Si lesdimensions de la cible sont inférieures à celles du faisceau, elle est vue sous un angle θinférieur à θs, les dimensions de l’image sont plus petites. Le rayon maximal de l’image estdonc .
Le diaphragme placé entre les deux lentilles est un diaphragme de champ empêchant lesrayons autres que ceux venant dans la même direction que l’objet, de passer. Son rayon vaut :
La lentille Lr1 a un rayon de 5 cm, le rayon du photorécepteur est de 1 mm. Calculons ladistance focale Lr2 pour que le photorécepteur soit éclairé sur toute sa surface.
Figure 15 : Afocal de réception
Le récepteur est équipé d’un filtre interférentiel (figure 13). Ce filtre sert à éliminer la lumièredont la longueur d’onde est différente de celle du laser Nd :YAG utilisé. La bande passante dufiltre doit être du même ordre que la largeur de raie du laser soit 120 GHz.
A.N. :
15
Pour λ= 1,064 µm, la luminance Le,λ( λ) de la cible en plein jour est de l’ordre de 10 W m-2
µm-1 sr-1 : puissance par unité de surface, de longueur d’onde et d’angle solide. Déterminonsle bruit PB sur le photorécepteur et comparons-le à la puissance minimale utile de 100 nW.
La surface du récepteur est : A = πR²Lr1 avec RLr1 = 5 cmL’angle solide de réception vaut Ω = 2π(1-cosθe) avec θe = 0,1 mrdLa largeur spectrale du filtre calculée précédemment vaut : 45,0=∆λ nm
A.N. : La puissance du bruit arrivant sur le détecteur est de l’ordre de 10-12 W, valeur trèsinférieure aux 100 nW nécessaire pour avoir détection.
Remarque : La valeur de 100 nW retenue comporte une large marge de sécurité, car il s’agitde se placer non pas dans une situation limite mais dans un cas où au moins 99,9% desmesures seront correctes. Le bruit provenant du soleil est ici négligeable.
La luminance spectrale du soleil au zénith et en plein été est donnée par :
Sachant que la sensibilité du détecteur ne permet de recevoir que le dixième de la brillance dusoleil, déterminons si le télémètre est opérationnel dans ces conditions sans filtreinterférentiel.
La puissance du bruit arrivant sur le détecteur sans filtre est plus de 5000 fois supérieure àcelle correspondant au seuil de détection, un fonctionnement dans ces conditions n’est doncpas possible, l’utilisation du filtre interférentiel est indispensable.
L’électronique de réception amplifie le signal reçu par le photorécepteur avec un gaincroissant. Ce procédé permet d’atténuer les échos parasites que rencontre le faisceau sur satrajectoire jusqu’à la cible. Le signal provenant des échos parasites est plus faible que celuiprovenant de la cible comme illustré sur la figure 16.

16
Figure 16 : Echos parasites rencontrés par le faisceau jusqu’à la cible