Embed Size (px)
Citation preview

8/18/2019 TFG Montalà Flaquer Marc
http://slidepdf.com/reader/full/tfg-montala-flaquer-marc 1/5
Image processing software for Near Earth Objects (NEOs) detection
Author: Marc Montal a Flaquer.Facultat de Fısica, Universitat de Barcelona, Diagonal 645, 08028 Barcelona, Spain.
Abstract: The development of image processing software has been one of the most relevantachievements in astronomy of the last decade. After succeeding to get technical improvement ontelescopes and detection systems it was needed to perfect the image processing software in order
to make good use of the equipment provided. Matched lter algorithms were implemented withina exible test oriented software which allows the exploration of various scenarios that could ariseduring the research. These matched lter techniques have proved to be more precise when processingstellar imagery for asteroid detection and tracking. The main purpose of this report is to putinto operation the image processing code SALTAD, which stands for SAIC Algorithm Test bedfor Asteroid Detection, and compare its results with another image processing software, VisualPinPoint.
I. INTRODUCTION
Near Earth Objects (NEOs) are asteroids or cometswith sizes that range from a few meters to tens of kilome-ters and whose orbits are close to the Earth’s. Even thatthe chance of an asteroid colliding the Earth is very smallit is very important to detect and catalog all those po-tential Earth impactors that would cause great destruc-tion[1]. One of the most important activities of the ESA’sSpace Situational Awareness (SSA) is to track and pre-dict the orbits of those objects. Nowadays of the morethan 600 000 known asteroids in our Solar System, almostthe 2% of them are NEOs.
Asteroid detection can be characterized by searchingfor moving bodies in a star-cluttered background. Due tothe short exposition time between the frames captured, itwill be assumed that asteroids follow a linear motion withuniform velocity across the eld of view and its intensityis fairly constant. As the star-cluttered background hasa spatial frequency content similar to that of the aster-oids it is impossible to distinguish a NEO just looking ata single static frame. What needs to be done is to puttogether all the exposures of the same region and blinkthem, so that the stars will remain motionless and a rel-ative movement of the asteroid will be seen. Local andglobal levels of the background can vary with time due toseeing conditions during the exposures and an associatednoise component will appear depending on the detectionelectronic device and star scintillation[2].
These effects, amongst others, will be considered to
maximize accuracy in detecting real asteroids over thefalse alarms for the image processing software. A falsealarm is a detection made by the image processing soft-ware which is not an asteroid. One particular example of false alarm commonly seen is the presence of momentaryhot pixel signletone in a single frame. A major progressin false alarm reduction is done when the raw data iscleaned of those spots before the image processing starts.
The Matched Filter Technique consist of correlatinga known signal with an unknown signal to detect thepresence of a pattern of this last one. The matched l-ter is the optimal linear lter for maximizing the signal
to noise ratio (SNR) in the presence of stochastic noise.The use of these techniques has provided nearly a half magnitude gain on moving target detections which leadsto two major improvements: Mitigation of False Alarmsand Reduction in Runtime Loading[3].
The rst one is bound to the fact that obtaining a no-table gain of the magnitude on the detected bodies pro-vides a better value of the SNR which is a crucial param-eter to distinguish the asteroids from the false alarms.The second improvement is based on the avoidance of high computational operations and the reduction of as-teroids motion hypothesis assuming a point source target.
II. FACILITIES AND EQUIPMENT
The detection of the NEOs will be done with imagesprovided by the Telescope Fabra ROA Montsec (TFRM)which is allocated at the summit of the Montsec d’Ares(Sant Esteve de la Sarga, Lleida).
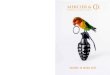
The TFRM project consists of the refurbishment of the 0.5 meter f/1 Baker-Nunn Camera (BNC) for roboticCCD surveying purposes. Its outstanding eld of viewallows to obtain images of 4.4 ◦ x4.4 ◦ using a 4kx4k 9µ m-sized CCD. The gure below (FIG.1) is the full eldof view taken with TFRM[4].
III. PINPOINT OVERVIEW
PinPoint is a programmable engine that provides sen-sitive astrometric image processing for FITS les. It hasbuilt-in all-sky plate solving and at a cost of additionaltime it eliminates the requirement for approximate imagecenterpoint coordinates and plate scale. Moreover, Pin-Point works at the cloud service of Astrometry.net anduses a visual interface, Visual PinPoint, which includesseveral automated tools for asteroid and supernova track-ing with optional blinking for validation[5].

8/18/2019 TFG Montalà Flaquer Marc
http://slidepdf.com/reader/full/tfg-montala-flaquer-marc 2/5
Image processing software for Near Earth Objects (NEOs) detection Marc Montal a
FIG. 1: TFRM 4096x4096 image frame sample of a star-
cluttered eld.
A. PinPoint Performance
The rst step is the plate solving, which by matchingthe stars from the FITS image with the cataloged onesgives precise asteroid and comet detection and measure-ment of their positions. Although the optics can produceastrometric distortion PinPoint is able to remove it viaadaptive higher-order solution conferring this engine agreat accuracy.
As the image size increases the time spent solving theplates grows steeply. While other packages crash whenasked to detect stars in a eld containing more thana hundred detectable stars, PinPoint can handle up to15,000 eld stars and match thousands of them[5]. Thefollowing times are approximate theoretical times to com-plete a plate solution and they are bound to a statisticalprocess either for the detection of the objects against thebackground noise and the catalog-eld star matching:
512x512 1024x1024 4096x4096Field (stars) 100 1,000 10,000
Catalog (stars) 20 300 2,000
Match(stars) 15 250 1,700Time (seconds) 0.5 2 30
TABLE I: Field stars, catalog stars, matched stars and ap-proximate elapsed time for a 1.5GHz class machine runningWindows XP when solving the plates of diferent sized imageswith PinPoint[5].
Once the plate is solved, the second step of the proce-dure is asteroid detection. Since the star positions havebeen determined by matching with the catalog, the en-gine uses an enhanced thresholded peak-nder for object
detection. Background noise statistics are calculated rstand used afterward to set the peak-nder’s threshold in32 zones of the image. Although PinPoint is a very ef-fective tool with a great precision it is unavoidable toobtain false alarms when trying to detect asteroids dueto the fact that seeing conditions may vary during theexposures.
IV. SALTAD OVERVIEW
The SAIC Algorithm Test bed for Asteroid Detection(SALTAD) is a collection of image processing modulesbuilt together as a common set of data structures anduniform coding standards. The software was developedunder two C++ development systems in order to allowfor both CPU and GPU user hardware congurations[6].These modules were created to provide the Near EarthAsteroid (NEA) search community with advanced imageprocessing software for both detecting and tracking as-teroids. They are able to apply matched lter processingtechniques that achieve fainter asteroid detection thanthe current moving target indicator (MTI) used by theNEA community.
A. SALTAD Image Processing
The SALTAD Driver Interface module is the one usedto declare all the internal structures and data arrays of the SALTAD library. The rst step in any image pro-cessing software is the one that involves the input im-agery data and the processing parameters. In order to
be compatible with most astronomical imaging facilitiesthe input imagery will be in the FITS le format[7] andthe control and run parameters will be set through anASCII text le that can be modied at any moment.
After the imagery is read into memory the next stepis to register each frame in the sequence of images. Thesoftware can support a minimum sequence of three framesup to a maximum of nine. It is required to set the timestep (in seconds) between the frames in relation to therst one. In addition, the software is provided with atwo-dimensional second order warped t to account forframe distortions. Moreover, the possible shift in both Xand Y axis between the frames must be set in order to
get the correct frame-to-frame star association.Once all images are stored into memory the next stepis equalization. This step consists of comparing andequalling the background levels of the images in orderto remove the mean. This is done to prevent the highnoise background of a single frame from dominating themean estimation. For that reason, all the frames are ref-erenced to the rst one on a pixel by pixel basis basedon the background trend.
The SALTAD software computes the spatial-temporalmean of each pixel in a nite extent region around eachpixel and across all frames. So if a straight temporal
Treball de Fi de Grau 2 Barcelona, June 2014

8/18/2019 TFG Montalà Flaquer Marc
http://slidepdf.com/reader/full/tfg-montala-flaquer-marc 3/5
Image processing software for Near Earth Objects (NEOs) detection Marc Montal a
mean is removed of all frames then there will be a targetloss capture due to the fact that part of the brightness of the asteroid is removed when the frames are demeaned.To correct that loss of signal-to-noise relation it will beassumed that the asteroid will only appear on the framethat has the brightest return for a given pixel. In otherwords, the spatial-temporal mean will be calculated skip-ping the brightest pixels.
The Point Spread Function parameter is related toshape of the source of light and it can be specied apixel width of a symmetric Gaussian function, a Moffatfunction or just a point source.
The next step of the procedure is the covariance esti-mation. This step consists of whitening the regions of theimage with high variability, such as scintillating stars, byremoving the noise in the image. With this purpose, anoise covariance estimate of the second order noise statis-tics needs to be done. It will be assumed that the noisevariance is not correlated between pixels and it will beestimated using the mean since bright tend to have vari-ances in proportion to their means.
The main processing loop of SALTAD involves the mo-tion hypothesis steps where a motion template le can bespecied. As the time step between frames is small it canbe considered a linear type motion and the lower and up-per motion speed can be set as well. Once the hypothesisof speed and direction of motion is made the images areshifted and added together according to the time spacingbetween frames and motion hypothesis vector.
After resolving the motion hypothesis it is necessary toconvolve the PSF, that means integrating all the pixelsaround the point target since the object may have trailedacross the image plane. Note that the PSF convolution isdone outside the hypothesis loop to save on computationtime.
The detection of asteroid motion requires a CFAR(Constant False Alarm Rate) detection scheme whereeach pixel location in the integrated image is tested rela-tive to the mean and variance of the matched lter outputcovering a donut region around the tested pixel. Thosepixels that cross the CFAR threshold are placed into apreliminary detection list. As many false alarms are gen-erated by the CFAR test it was implemented a secondtest to reduce them. Now the boundary is that detectedasteroids should have a relative constant level of intensityacross the frames. This assumption will eliminate a largenumber of false alarms from pixel noise spikes or brightstar diffraction gures.
The nal detection list is output to an ASCII text lefor review by the user. The report contains informationof the signal-to-noise ratio, coordinates of the asteroidboth the raw main image and the sub-images surveyed[6].
V. SOFTWARE PERFORMANCE RESULTS
The data used in this analysis includes 9 images (3elds of view with 3 frames each) from the 0.5 meter
telescope with a f/1 refurbished Baker-Nunn Cameraon October the 6th of 2013 under good seeing condi-tions[4]. Evaluations were made on the performance of the SALTAD software in detecting asteroids. In the fol-lowing subsections we will discuss the results from thatanalysis.
A. PinPoint Results
The PinPoint software has demonstrated a precise abil-ity to detect a good amount of asteroids in the imagesprovided. The catalog used to solve the plates was theUSNO UCAC2 which is a high density and gratly accu-rate catalog of more than 48 million stars[8]. The maxi-mum magnitude threshold for asteroid detection was setat 18, which is a reasonable one because it does not crossthe fainter limit where asteroids are difficult to detect(near 21st magnitude).
In TABLE II the results of both the detected asteroidsand false alarms on the three elds of view are shown. Itshould be noted that the proposal for this report was toput into operation the SALTAD software so these resultswill be taken as a reference as we will be expecting similarresults with it.
Asteroids False AlarmsField 1 23 11Field 2 9 13Field 3 35 15
TABLE II: Asteroid and false alarms detected with PinPointin three diferent star-cluttered elds.
B. SALTAD Results
The SALTAD matched lter algorithms have shown tobe a very powerful tool in asteroid detection and tracking.After several processing scans we found positive matcheson asteroid detection when readjusting some parametersthat will be discussed immediately.
Below it can be seen (TABLE III) the results of de-tected asteroids and false alarms on the same three eldsof view we scanned with the PinPoint software. Note the
strong decrease in the number of false alarm detectionswhile the total amount of asteroid detections is just alittle bit lower than before.
Asteroids False AlarmsField 1 15 1Field 2 10 7Field 3 31 5
TABLE III: Asteroid and false alarms detected with SALTADin three diferent star-cluttered elds.
Treball de Fi de Grau 3 Barcelona, June 2014

8/18/2019 TFG Montalà Flaquer Marc
http://slidepdf.com/reader/full/tfg-montala-flaquer-marc 4/5
Image processing software for Near Earth Objects (NEOs) detection Marc Montal a
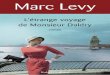
FIG. 2: Example of asteroid detection with the SALTAD software on Field 3. The asteroid is located in the green circle whichradius is constant on the same three frames.
An example of a positive asteroid detection can be seenabove (FIG.2) where the use of SAOImage DS9 was re-quired to open and blink the frames as we did not usethe visual interface of the SALTAD software.
C. SALTAD Result Summary
One particular parameter that appeared to be highlyrelevant for asteroid detection was the pixel shift reso-lution per frame which controls the number of pixels aframe can shift in relation to the rst one. Its recom-mended value is 1.0 because it saves computation time
when processing but increasing that threshold until 2.0will provide us with more detections despite a highercomputation time.
While trying to reduce the computation time we real-ized that SALTAD can scan the frames by dividing theminto subimages. At rst glance that did not seem toimprove our results because computation time remainedfairly constant but by dividing the frame into subimageswe obtained much more detections.
Obtention of a great amount of detections carries anintrinsic problem which is the presence of false alarms.That is why we needed to readjust more parameters, sothe second critical restriction we modied was the signal-
to-noise (SNR) constancy limit. Its default value wasxed on 6.0 which in our opinion was a fairly relaxedboundary so we decided to tighten this condition and setthe SNR constancy limit to 3.0. Having this done wehad a reduction of over the 50% over 50 % of the totaldetections and only one or two positive detections, whichmeans asteroids, where lost in this step.
In order to achieve better detection ratios betweenasteroid tracking and false alarms we tried to optimizesome of the multiple parameter options available in theSALTAD software. The rst one we readjusted was thecovariance which we preferred to estimate using the sec-
ond highest pixel in an image set rather than the diagonalmean as it was set by default. Moreover, it was initiallyproposed to use a global starless mean but after severaltrials with a local median average and a local medianmean we returned to the default setting which performedbetter.
In addition it was found that SALTAD detection per-formance was less effective when it used a point modelrepresentation of the Point Spread Function (PSF) ratherthan a Gaussian function. This is due to the fact thatapplying a point model was too restrictive and the onlydetections made appeared to be false alarms. From thereon different values of the Gaussian radius extension andthe half-power at half-width were evaluated and nallyset to the default ones which better performed with ourimagery.
One area that needs further renement is in the re-evaluation of candidate detections by automated meansin order to reject a greater percentage of false alarms.The main cause of these false alarms is bound to thepresence of bright single pixel ares on one frame or CCDpixel bleed lines from bright stars. Those effects shouldbe removed prior to application of SALTAD image pro-cessing modules.
Also, in this report only sequences of three frames aresurveyed and analyzed despite the software capability of processing up to nine frames. Although a ve frame se-quence was tried to be processed we did not get any pos-itive results, which means to us that all the parametersshould be retested and reset for the new scenario. Thisquestion opens new options and requires further investi-gation.
VI. CONCLUSIONS
• The main purpose of this report was to put intooperation the SALTAD image processing software
Treball de Fi de Grau 4 Barcelona, June 2014

8/18/2019 TFG Montalà Flaquer Marc
http://slidepdf.com/reader/full/tfg-montala-flaquer-marc 5/5
Image processing software for Near Earth Objects (NEOs) detection Marc Montal a
and, comparing the results obtained between bothPinPoint and SALTAD, we can conclude that thissoftware is now perfectly set to detect asteroids.
• The analysis of the results presented reveals thatwhile PinPoint seems to yield around 10% more as-teroids than SALTAD does - this second software isable to mitigate better false alarm detections which
means that it is more accurate.• Looking into optimize the multiple settings avail-
able to the software we found that the Pixel ShiftResolution per frame setting was a critical param-eter for asteroids to be detected during the imageprocessing. By increasing its value we relaxed alittle bit the constraint of the pixel shifting and ob-tained a larger list of detections.
• Finally in closing, we would like to remark thatfurther improvement could have been made if rawimages have had their bright pixel ares and CCDpixel bleed lines removed.
Acknowledgments
I would like to gratefully acknowledge Dr. Jorge N´ unezof the DAM Universitat de Barcelona for his help and ad-vices when starting and developing this report. Further-more, Adri a Gr acia and Irene Escudero have also con-tributed with their support and corrections.
[1] Arianna E. Gleason and Jeffrey A. Larsen, Final Compar-ison of SAIC SALTAD Algorithms to Current Spacewatch MTI Software , University of Arizona, 2003.
[2] Peter S. Gural, Dr. Jeffrey Larsen and Arianna E. Gleason,”Matched Filter Processing for Asteroid Detection” . TheAstronomical Journal, 130 : 19511960 (2005).
[3] Peter S. Gural and Dr. Jeffrey Larsen, Asteroid Search with Advanced Detection Algorithms , NASA Tech. Rep.20040021361; Hanover: NASA.
[4] O. Fors, J. N´unez, F.J. Montojo, J.L Mui˜ nos, J. Boloix, R.Baena, R. Morcillo and M. Merino Telescope Fabra ROAMontsec: A New Robotic Wide Field Baker - Nunn Fa-cility . The Astronomical Society of the Pacic, Vol. 125,
Num. 297, (2013).[5] PinPoint Astrometrical Engine
(http://pinpoint.dc3.com/)[6] Peter S. Gural, SALTAD 1.51 Software User’s Guide , Sci-
ence Applications International Corp., 2011.[7] Wells, D. C., Greisen, E. W. and Harten, R. H, FITS: A
Flexible Image Transport System , Astronomy and Astro-physics Supplement Series 44: 363370, (1981).
[8] Smithsonian Astrophysical Observatory- Telescope Data Center (http://tdc-www.harvard.edu/catalogs/index.html).
Treball de Fi de Grau 5 Barcelona, June 2014