Embed Size (px)
Citation preview
PROJET SARI - PREDIT 3
Surveillance Automatisée de la Route pour l’Information des conducteurs et des gestionnaires
Thème 3 : IRCAD
Etat de mouillage critique
Livrable 1.3
RCADPREDIT SARI
RCADPREDIT SARIPREDIT SARI
Référence SARI_IRCAD_livrable1.3_rev2.doc Date 10/04/2009 Version v2 Partenaire(s) : CETE Lyon
Animateur : Michel GOTHIÉ
Contributeur(s) : Mounia NADJI, Thierry GIBRAT, Mathieu
LE PEN, Mathias LIEGEOIS, Delphine TROTEL, Michel GOTHIÉ,
Thème 3 (IRCAD) – 2ème tranche Financement DRI - Direction de la Recherche et de
l’Innovation
Responsable : Michel GOTHIÉ
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
2
SOMMAIRE
1. Objet du livrable :.................................................................................................... 3 2. Adhérence et hauteur d’eau ................................................................................... 4 Bibliographie............................................................................................................... 8 3. Présentation des deux sites retenus....................................................................... 9 4. Appareils et méthodes utilisés pour les mesures.................................................. 12
4.1. Mesure des caractéristiques géométriques avec l’appareil VANI............ 12 4.2 Mesure de coefficients de frottement avec l’appareil GRIPTESTER (CFL) 13 4.3 Mesure de coefficient de frottement avec l’appareil SCRIM (CFT)........ 14 4.4 Mesure de macrotexture avec le RUGO (PMP et PTE) ........................... 15 4.5 Mesure de l’uni transversal avec le PALAS 2 ........................................ 16
5. Démarche proposée par le CETE de Lyon ........................................................... 17 6. Hypothèses prises et principaux résultats ............................................................ 21
6.1 Intensités de pluviométrie retenues ........................................................... 21 6.2 Principaux résultats ...................................................................................... 21
7. Conclusions .......................................................................................................... 25 Annexes ............................................................................................................... 30 1-Caractéristiques des sites............................................................................... 30 2-Alertes utilisées dans ALERTINFRA .............................................................. 30 3-Résultats des mesures VANI sur les 2 sections............................................ 30 4-Résultats des mesures SCRIM + RUGO......................................................... 30 5-Résultats des mesures de PALAS 2............................................................... 30 6-Affichage des lignes d’écoulement ................................................................ 30
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
3
1. Objet du livrable :
Dans le cadre du projet SARI ( Surveillance Automatisée de la Route pour l’Information des
conducteurs et des gestionnaires) et du sous projet IRCAD (Informer des Risques de rupture
de l’itinéraire en Conditions Atmosphériques Dégradées) financé par le PREDIT, l’ERA n°12
du LRPC de Lyon a réalisé une étude bibliographique sur les relations entre adhérence et
hauteur d’eau.
Ce livrable présente cette bibliographie et une démarche à suivre pour estimer l’influence de
la pluviométrie sur l’adhérence et donc sur la vitesse de passage sur deux sites. Cette
démarche devrait pouvoir être proposée pour faire partie de la fonction contrôle commande
du dispositif implanté au bord de deux sections à risques situées dans le département des
Côtes d’Armor.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
4
2. Adhérence et hauteur d’eau
ETAT DE L’ART :
Les principales études étudiées ne fournissent pas une formulation directe permettant de
relier l’adhérence à la variation de la hauteur d’eau. Quelques études peuvent être citées qui
relient le coefficient de frottement à des phénomènes approchant cette notion de hauteur
d’eau tels que :chaussée mouillée, hydroplanage ou intensité de pluie.
Dans une étude [1] effectuée sur l’effet de la chaussée mouillée sur l’adhérence des roues
d’avion, est proposée une analyse expérimentale de l’influence de certains paramètres tels
que la température ou la pression de gonflage sur l’adhérence en chaussée mouillée.
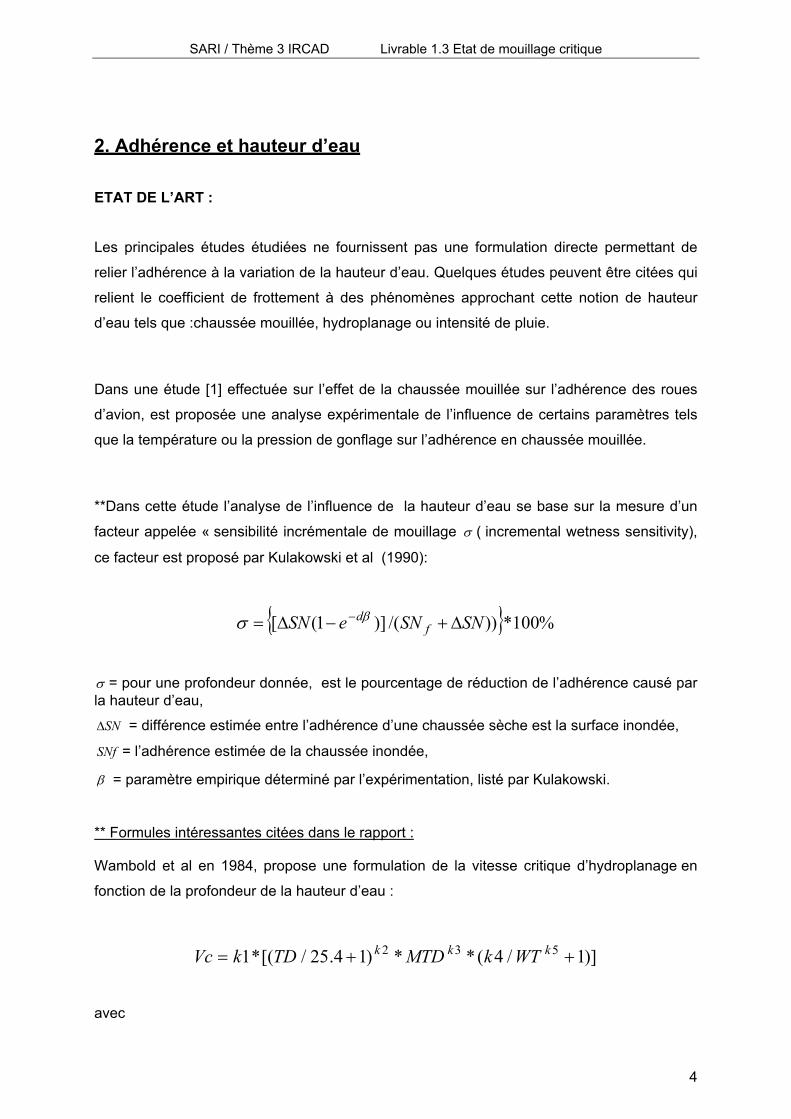
**Dans cette étude l’analyse de l’influence de la hauteur d’eau se base sur la mesure d’un
facteur appelée « sensibilité incrémentale de mouillage σ ( incremental wetness sensitivity),
ce facteur est proposé par Kulakowski et al (1990):
{ } %100*))/()]1([ SNSNeSN fd ∆+−∆= − βσ
σ = pour une profondeur donnée, est le pourcentage de réduction de l’adhérence causé par la hauteur d’eau,
SN∆ = différence estimée entre l’adhérence d’une chaussée sèche est la surface inondée,
SNf = l’adhérence estimée de la chaussée inondée,
β = paramètre empirique déterminé par l’expérimentation, listé par Kulakowski.
** Formules intéressantes citées dans le rapport :
Wambold et al en 1984, propose une formulation de la vitesse critique d’hydroplanage en
fonction de la profondeur de la hauteur d’eau :
)]1/4(**)14.25/[(*1 532 ++= kkk WTkMTDTDkVc
avec
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
5
Vc = vitesse critique d’hydroplanage,
WT= profondeur du film d’eau estimée,
MTD = profondeur moyenne de la texture,
k1, k2, k3, k4 et k5 = coefficients empiriques déterminés expérimentalement.
Dans [2] un état de l’art sur l’évaluation de l’hydroplanage est proposé, on résume quelques
formules qui nous semble intéressantes :
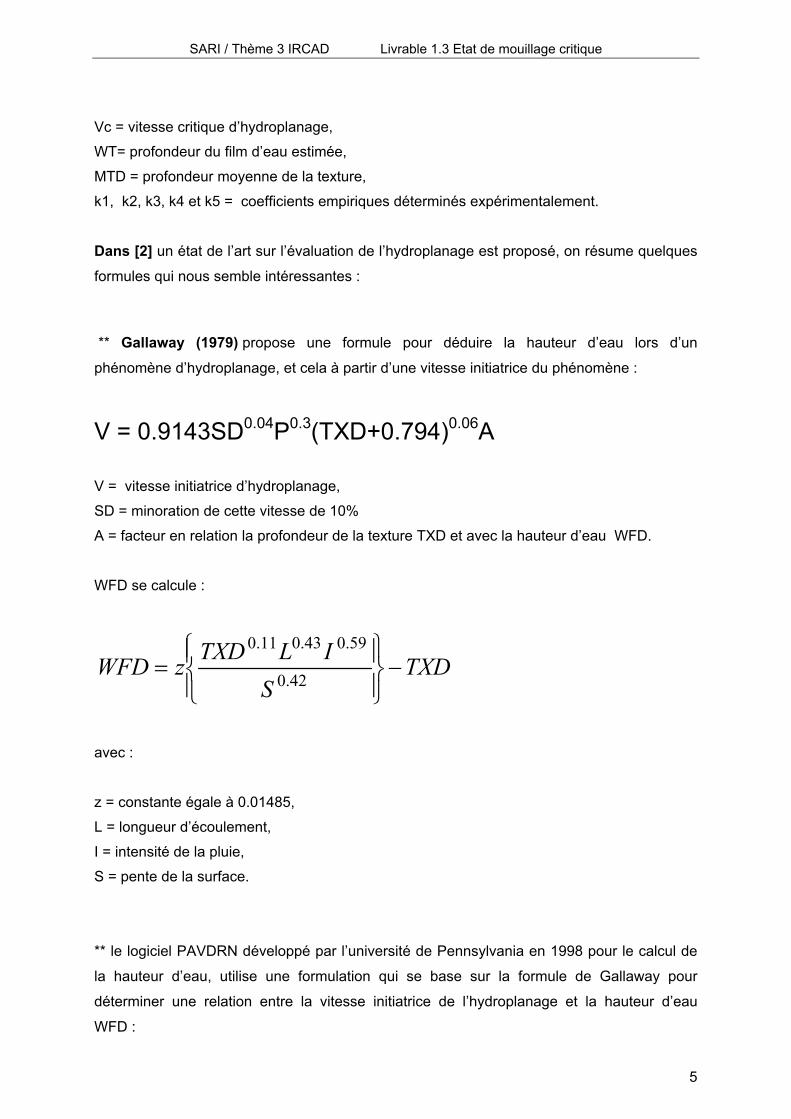
** Gallaway (1979) propose une formule pour déduire la hauteur d’eau lors d’un
phénomène d’hydroplanage, et cela à partir d’une vitesse initiatrice du phénomène :
V = 0.9143SD0.04P0.3(TXD+0.794)0.06A
V = vitesse initiatrice d’hydroplanage,
SD = minoration de cette vitesse de 10%
A = facteur en relation la profondeur de la texture TXD et avec la hauteur d’eau WFD.
WFD se calcule :
TXDS
ILTXDzWFD −
=42.0
59.043.011.0
avec :
z = constante égale à 0.01485,
L = longueur d’écoulement,
I = intensité de la pluie,
S = pente de la surface.
** le logiciel PAVDRN développé par l’université de Pennsylvania en 1998 pour le calcul de
la hauteur d’eau, utilise une formulation qui se base sur la formule de Gallaway pour
déterminer une relation entre la vitesse initiatrice de l’hydroplanage et la hauteur d’eau
WFD :

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
6
HPS = 26.04 WFD ( avec WFD <2.4 mm)
HPS est la vitesse d’hydroplanage.
** Dans [3] les techniques de mesure et les procédures expérimentales pour l’élaboration du
logiciel PAVDRN sont décrites. La technique pour la mesure de la hauteur d’eau est
détaillée.
** Ivey et al (1975) propose une formule empirique entre l’intensité de la pluie, la vitesse et la
visibilité :
Sv = distance de visibilité
I = intensité de la pluie
V = Vitesse du véhicule.
Dans [4], un facteur SN0R appelé « facteur de la variation de la pluie » est utilisé dans une
formule générale dans le calcul de l’influence de l’environnement sur l’adhérence est
présenté, cette formule est proposé par Hill et Henry [5] :
TpDSFSN R 104.017.179.30 −−=
ou DSF est le facteur de chaussée mouillée, égal au logarithme de tR, tR est le nombre de
jours ou la pluie est tombée au-dessus de 2,5 mm/h :
DSF = ln(tR+1)
ViSv 402000
68.0=
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
7
Avec
Tp = température de la chaussée.
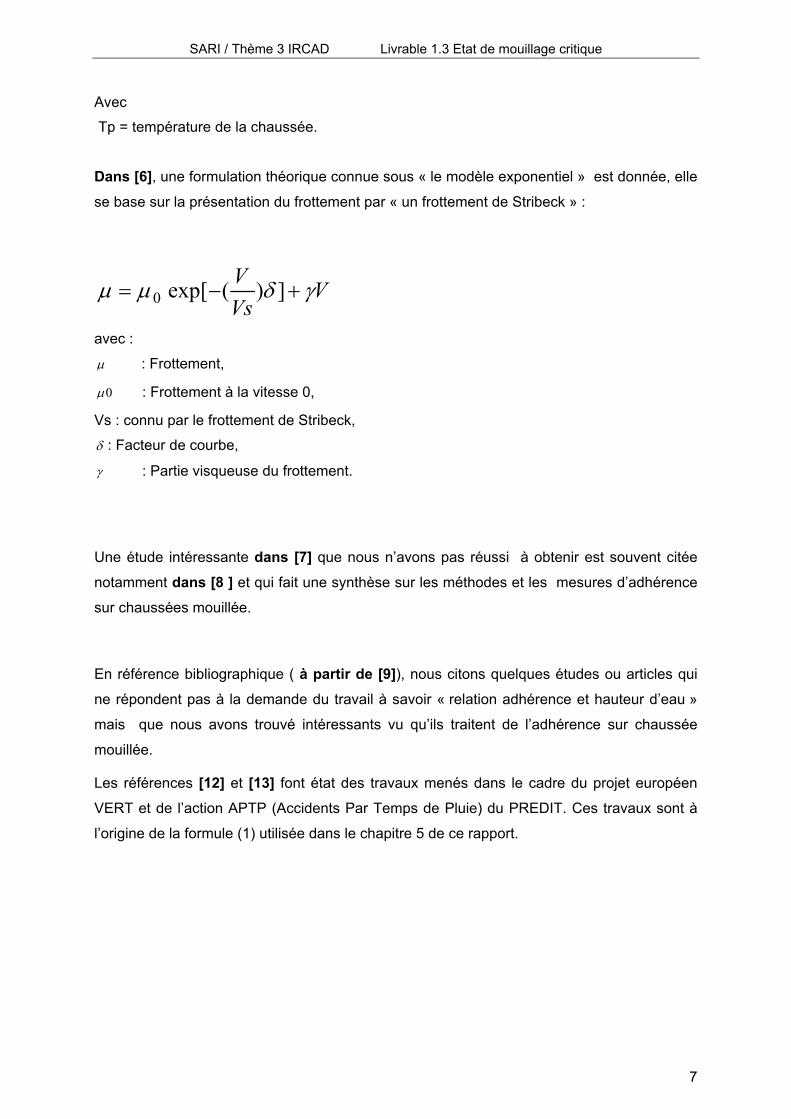
Dans [6], une formulation théorique connue sous « le modèle exponentiel » est donnée, elle
se base sur la présentation du frottement par « un frottement de Stribeck » :
VVsV γδµµ +−= ])(exp[0
avec :
µ : Frottement,
0µ : Frottement à la vitesse 0,
Vs : connu par le frottement de Stribeck,
δ : Facteur de courbe,
γ : Partie visqueuse du frottement.
Une étude intéressante dans [7] que nous n’avons pas réussi à obtenir est souvent citée
notamment dans [8 ] et qui fait une synthèse sur les méthodes et les mesures d’adhérence
sur chaussées mouillée.
En référence bibliographique ( à partir de [9]), nous citons quelques études ou articles qui
ne répondent pas à la demande du travail à savoir « relation adhérence et hauteur d’eau »
mais que nous avons trouvé intéressants vu qu’ils traitent de l’adhérence sur chaussée
mouillée.
Les références [12] et [13] font état des travaux menés dans le cadre du projet européen
VERT et de l’action APTP (Accidents Par Temps de Pluie) du PREDIT. Ces travaux sont à
l’origine de la formule (1) utilisée dans le chapitre 5 de ce rapport.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
8
Bibliographie
[1] G.Comfort: Wet Runway Friction: Literature and information review. Centre de développement en transport. Aout 2001.
[2] J.Chestron et al: The use of the Gallaway formula for aquaplaning evaluation. NZIHT & Transit NZ Annual Conference 2006.
[3] NCHRP Web Doc 16 Improved Surface Drainage of Pavement: Final report (1998) Transportation research Board (TRB).
[4] Y.Luo: effect of pavement temperature on frictional properties of Hot-Mix Asphalt Pavement Surfaces at Virginia Smart Road. Master en sciences, Université de Virginia. 2003.
[5] B.j.Hill et JJ Henry: Surface Material and properties related to seasonal variations in skid resistance .ASTMSTP 763, p5.
[6] M.T.Do, Y.Delanne: Prediction of Tire/Wet Road friction and its variation with speed road macro and Microtexture, and tire related properties.
[7] J.J.Henry : “evaluation of pavement friction characteristics”,NCHRP Synthesis 291, National Cooperative Highway Research Program, Transportation research Board, Washington DC. 2000.
[8] J.W. Button, E.G.Fernando et al: Synthesis of pavement issues related to high speed corridors. Texas transportation institute, 77843-3135.
[9] L.E. Jackson et al: HVE Data Inputs Based on Testing for a wet Pavement accident, Involving an Intercity Bus and SUV. National safety board WP.2005.
[10] A. Dijks : Influence of tread depth on wet skid resistance of tires. Delft University, Netherlands, TRR 621, 1976.
[11] B.N.J Persson, U .Tartaglino et al: Rubber friction on wet and dry road surfaces: the sealing effect. ref: phys.rev. B 71 , 035428. 2005.
[12] M. Gothié M. Pruvost LRPC Lyon : AR 2.61.103.00 APTP : « Modélisation des hauteurs d’eau sur chaussées » Projet VERT – Pôle ESR – CT 61 – 4 août 2000
[13] R.Guillemein LCPC « Hauteurs d’eau sur chaussées » APTP – PREDIT – Mars 2001
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
9
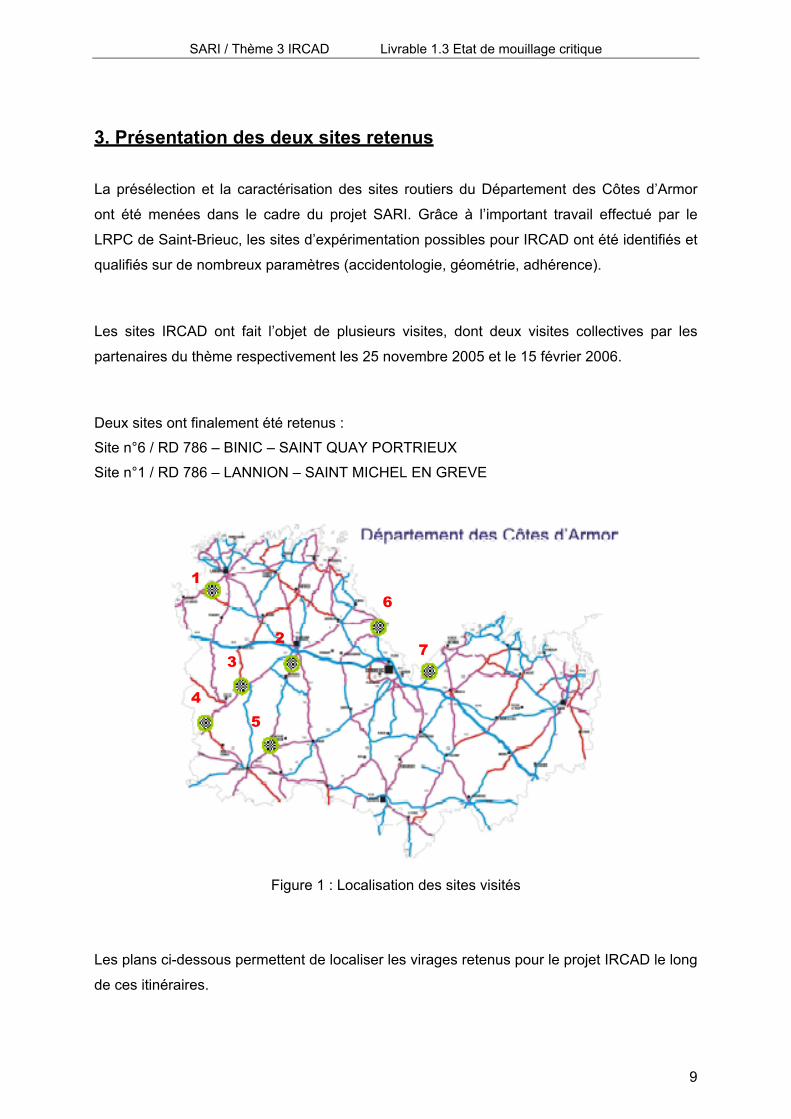
3. Présentation des deux sites retenus
La présélection et la caractérisation des sites routiers du Département des Côtes d’Armor
ont été menées dans le cadre du projet SARI. Grâce à l’important travail effectué par le
LRPC de Saint-Brieuc, les sites d’expérimentation possibles pour IRCAD ont été identifiés et
qualifiés sur de nombreux paramètres (accidentologie, géométrie, adhérence).
Les sites IRCAD ont fait l’objet de plusieurs visites, dont deux visites collectives par les
partenaires du thème respectivement les 25 novembre 2005 et le 15 février 2006.
Deux sites ont finalement été retenus :
Site n°6 / RD 786 – BINIC – SAINT QUAY PORTRIEUX
Site n°1 / RD 786 – LANNION – SAINT MICHEL EN GREVE
Figure 1 : Localisation des sites visités
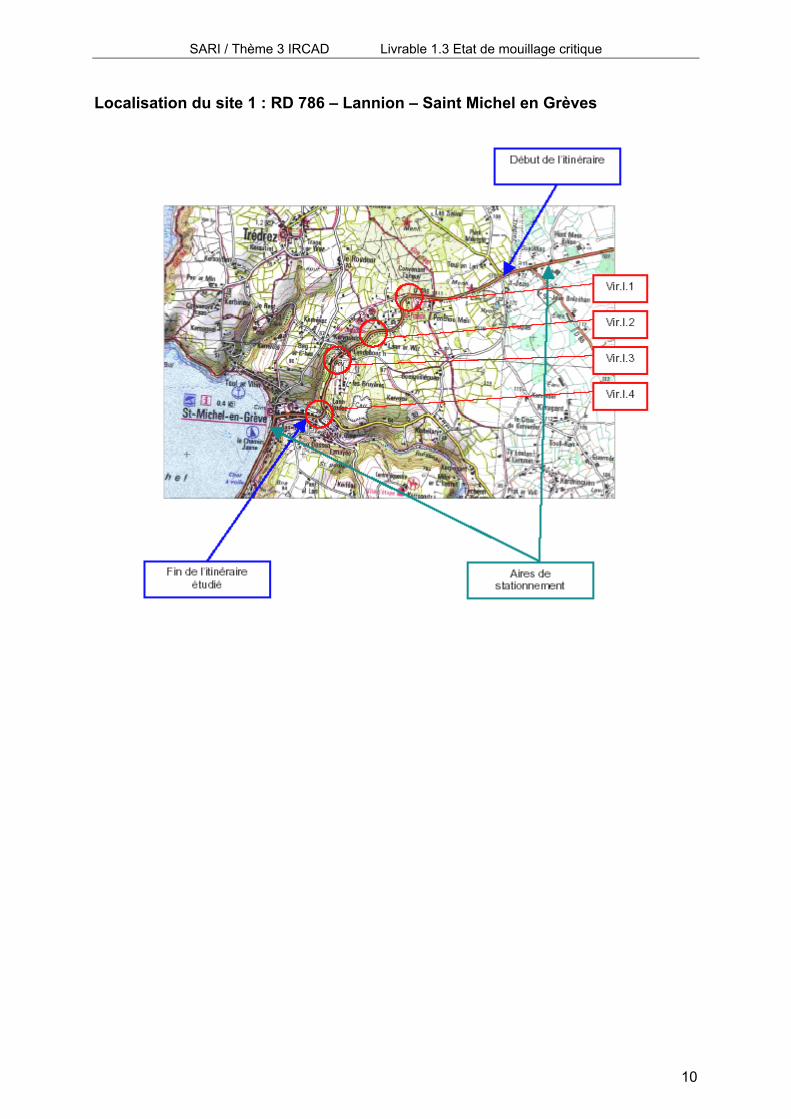
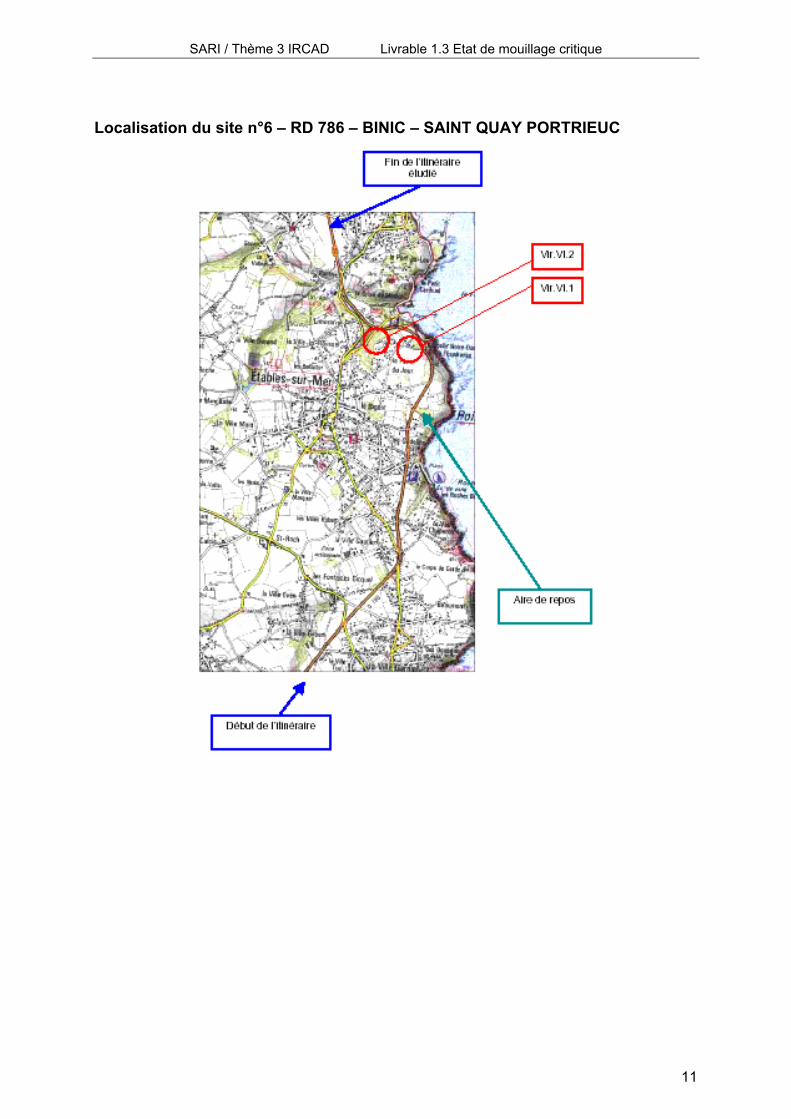
Les plans ci-dessous permettent de localiser les virages retenus pour le projet IRCAD le long
de ces itinéraires.
1
2 3
4 5
6
7
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
10
Localisation du site 1 : RD 786 – Lannion – Saint Michel en Grèves
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
11
Localisation du site n°6 – RD 786 – BINIC – SAINT QUAY PORTRIEUC
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
12
4. Appareils et méthodes utilisés pour les mesures
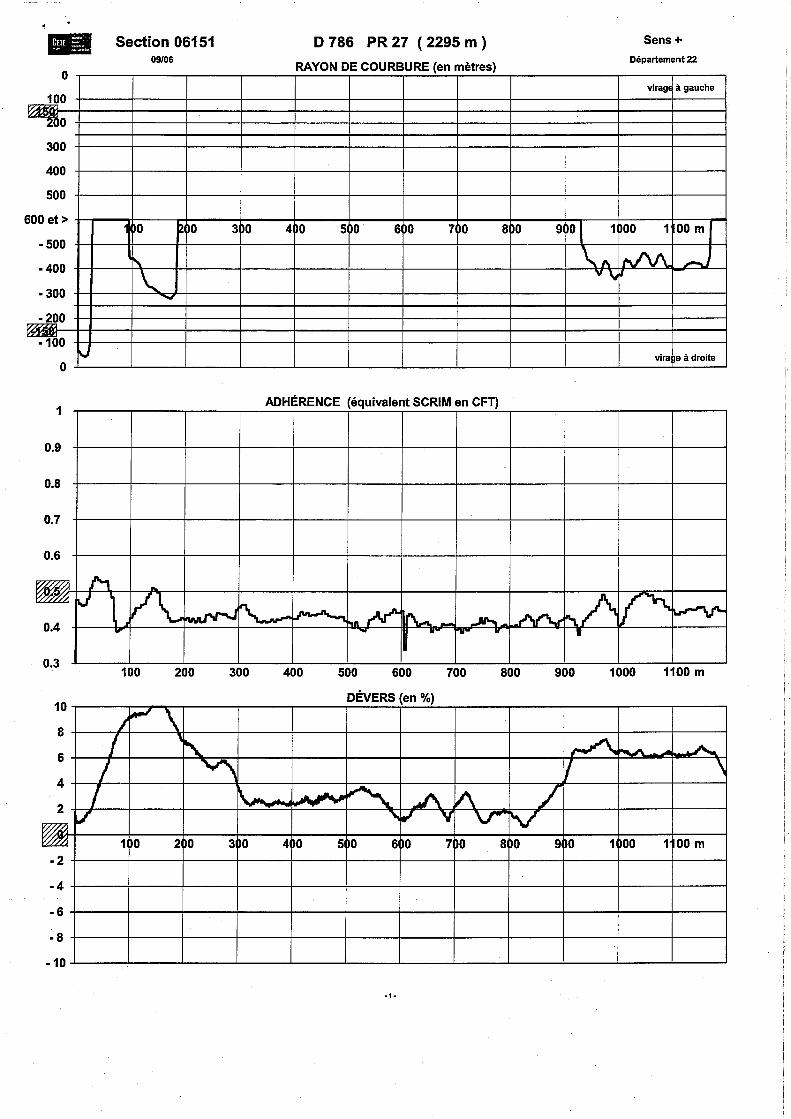
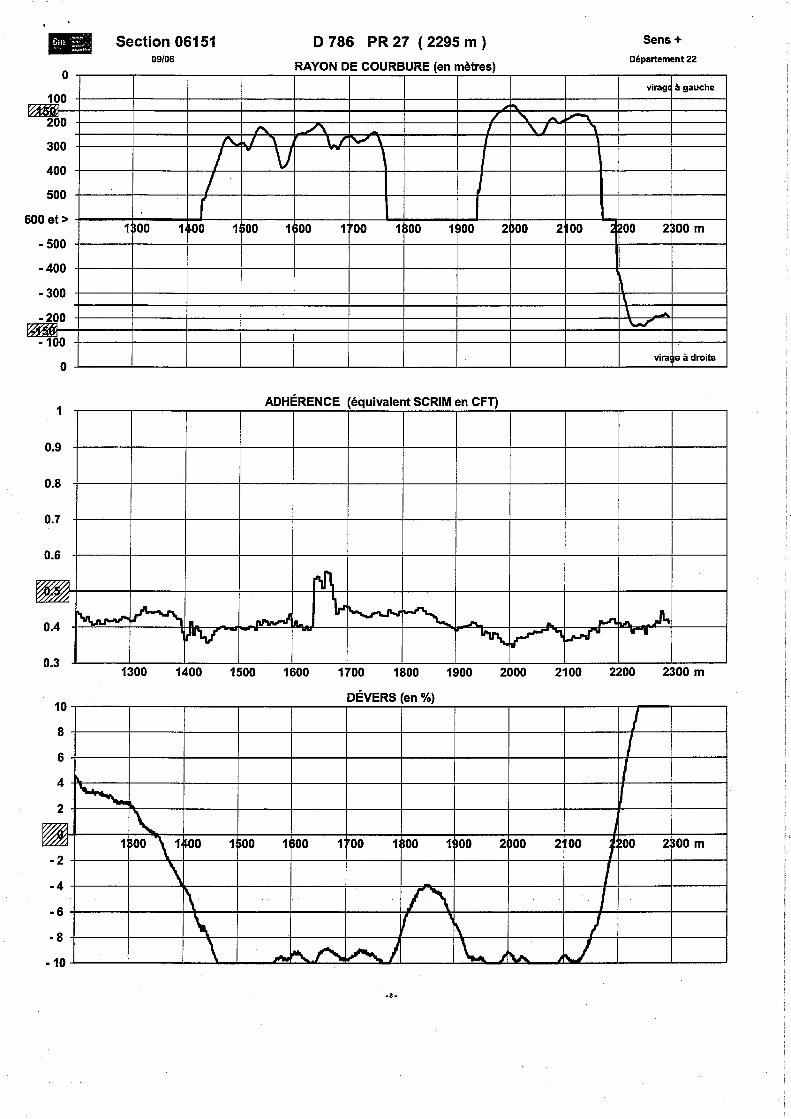
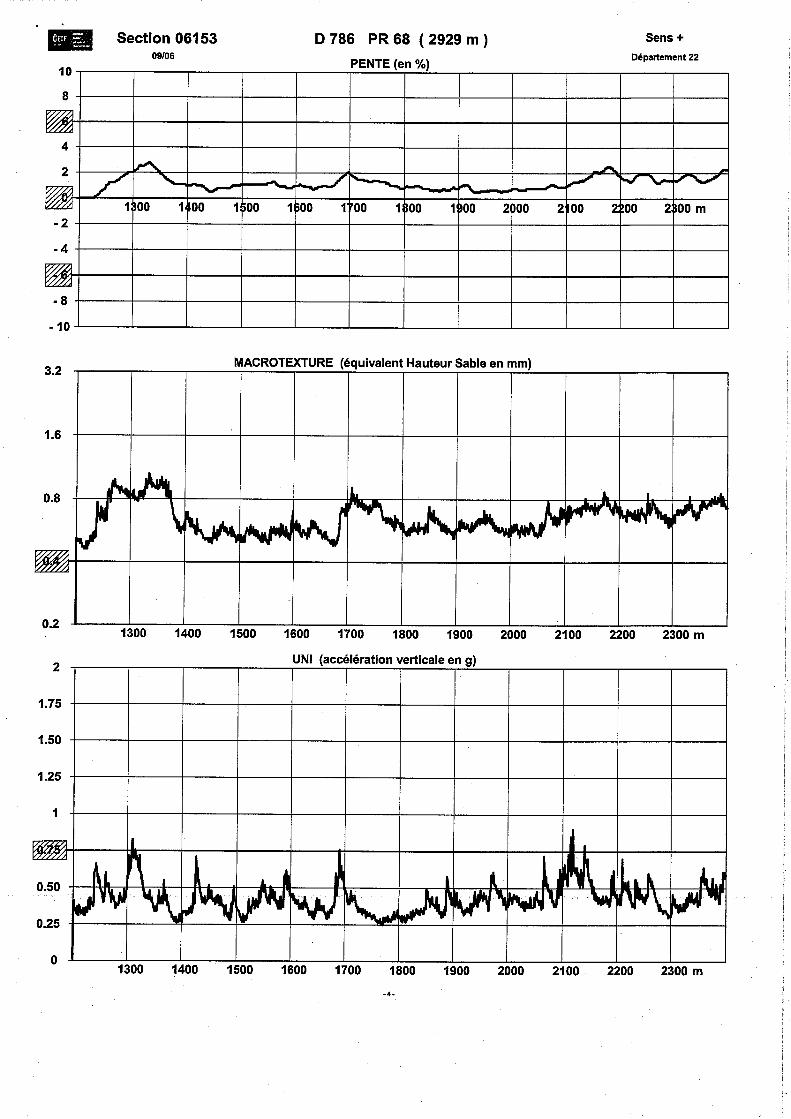
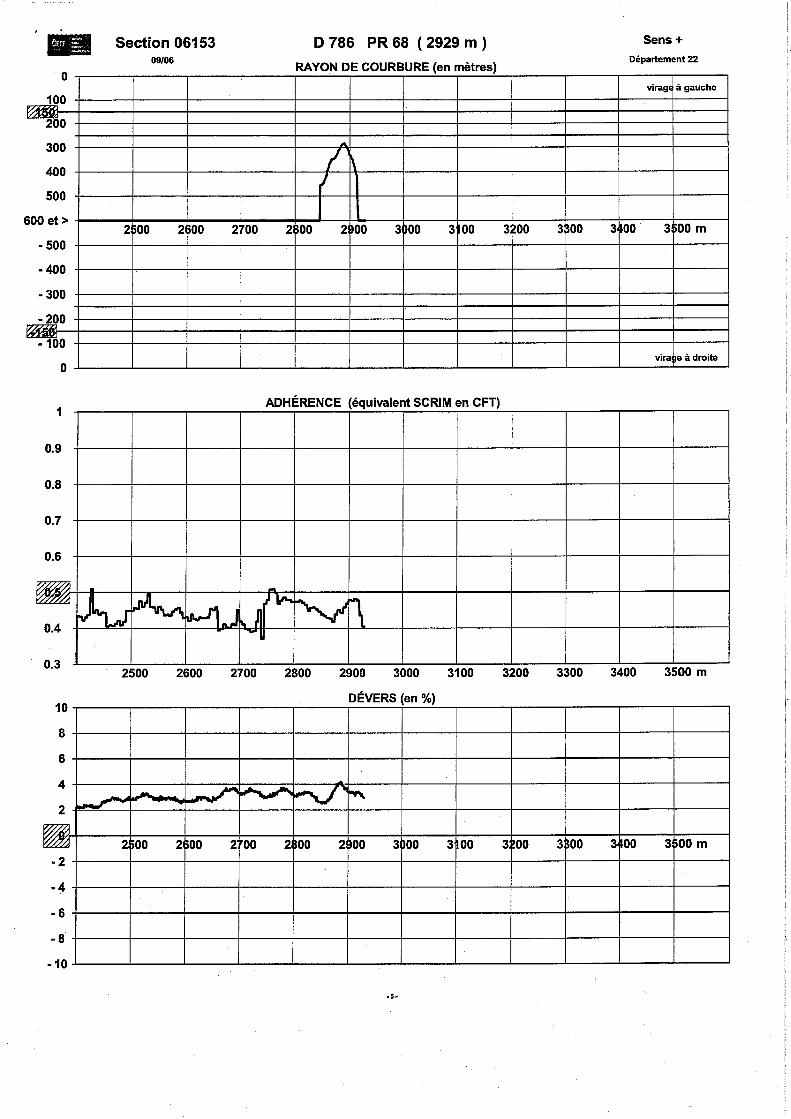
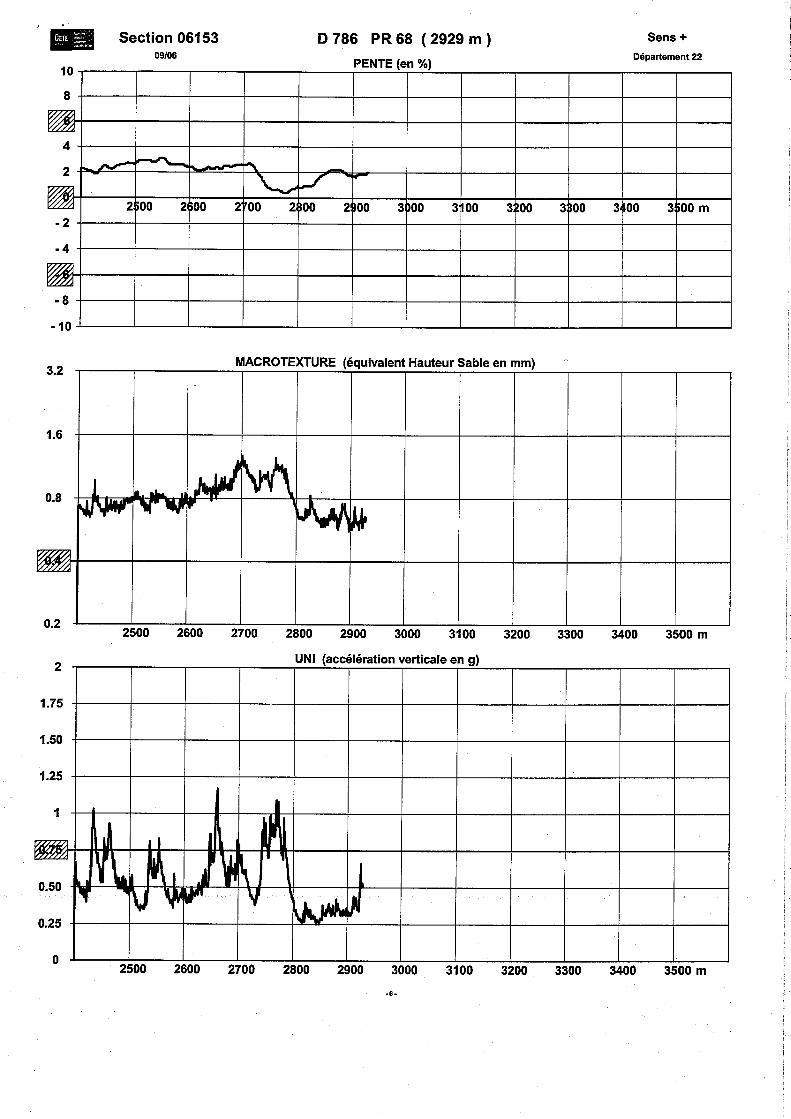
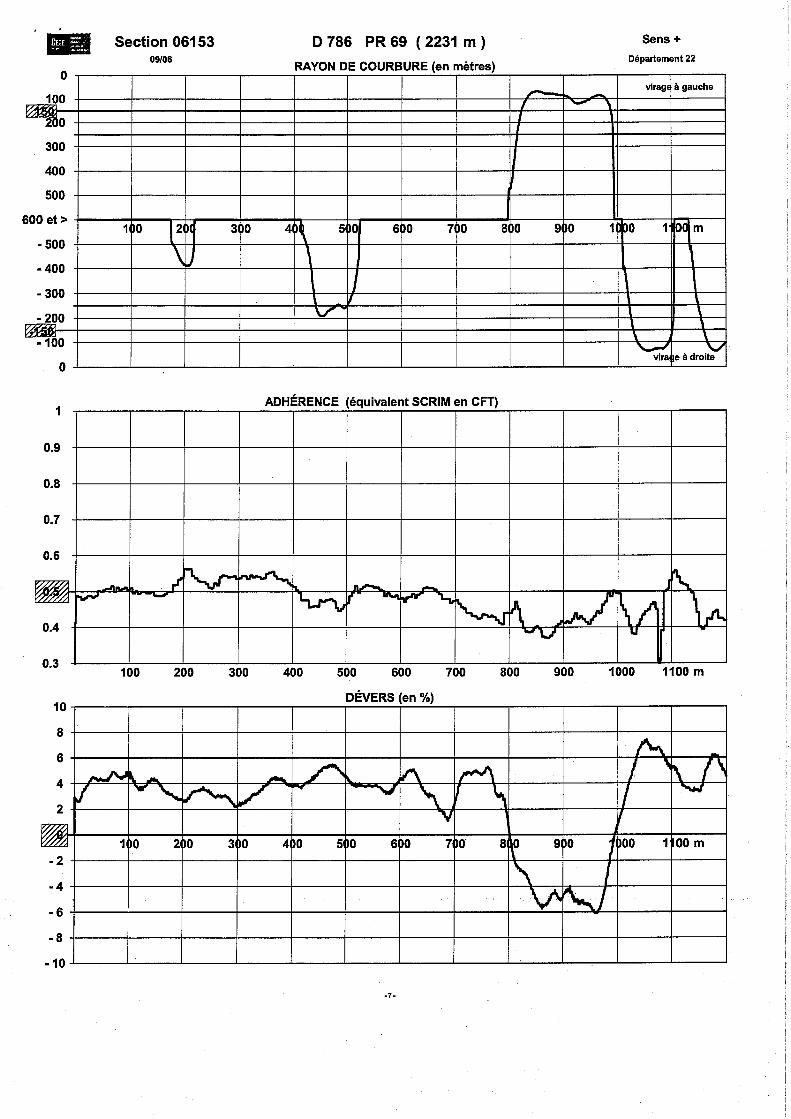
4.1. Mesure des caractéristiques géométriques avec l’appareil VANI
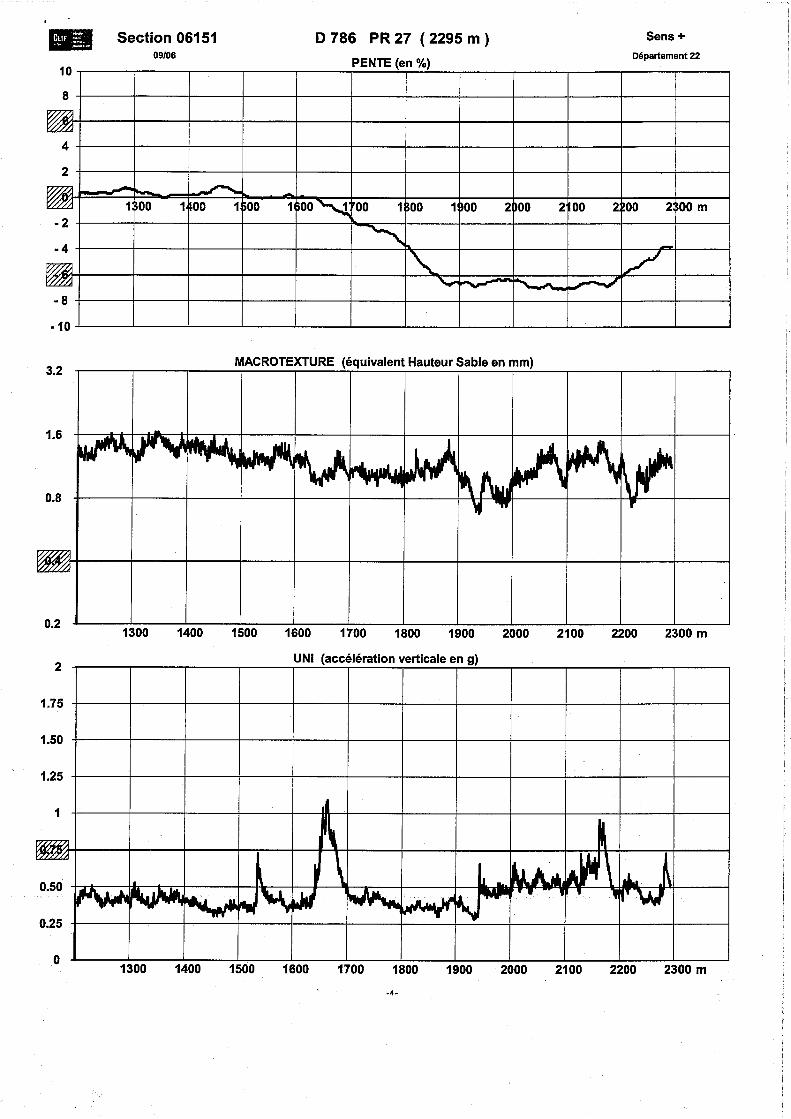
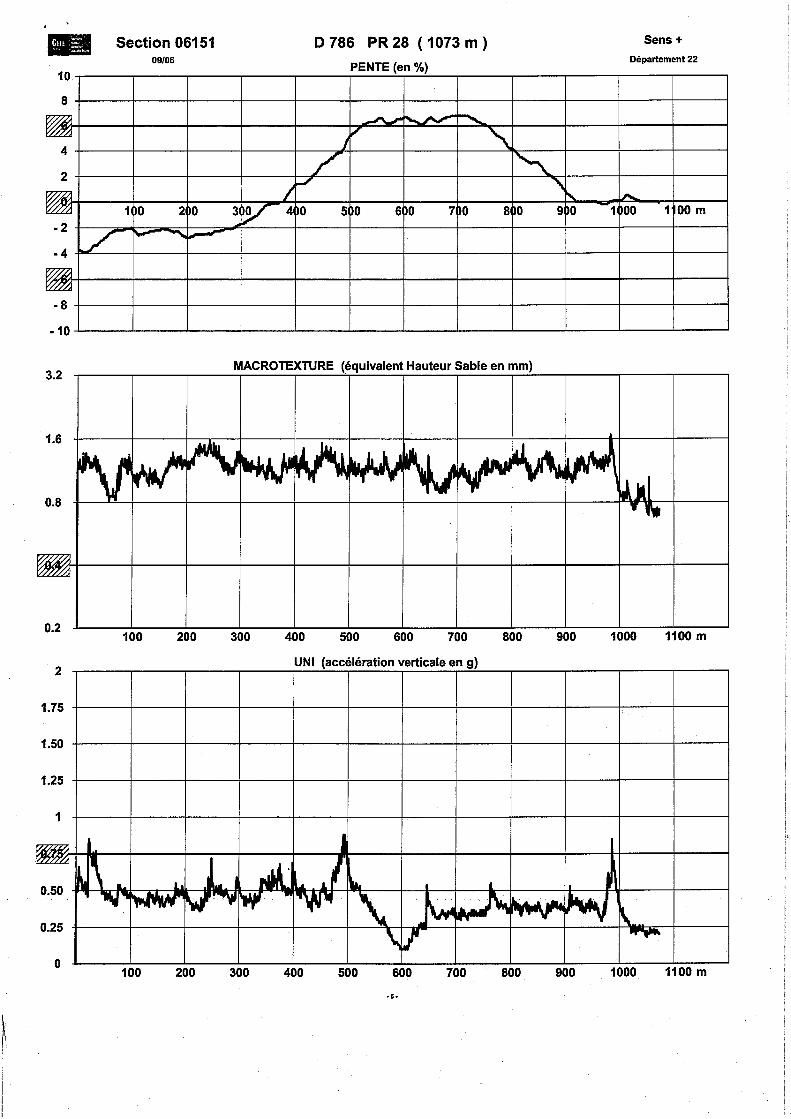
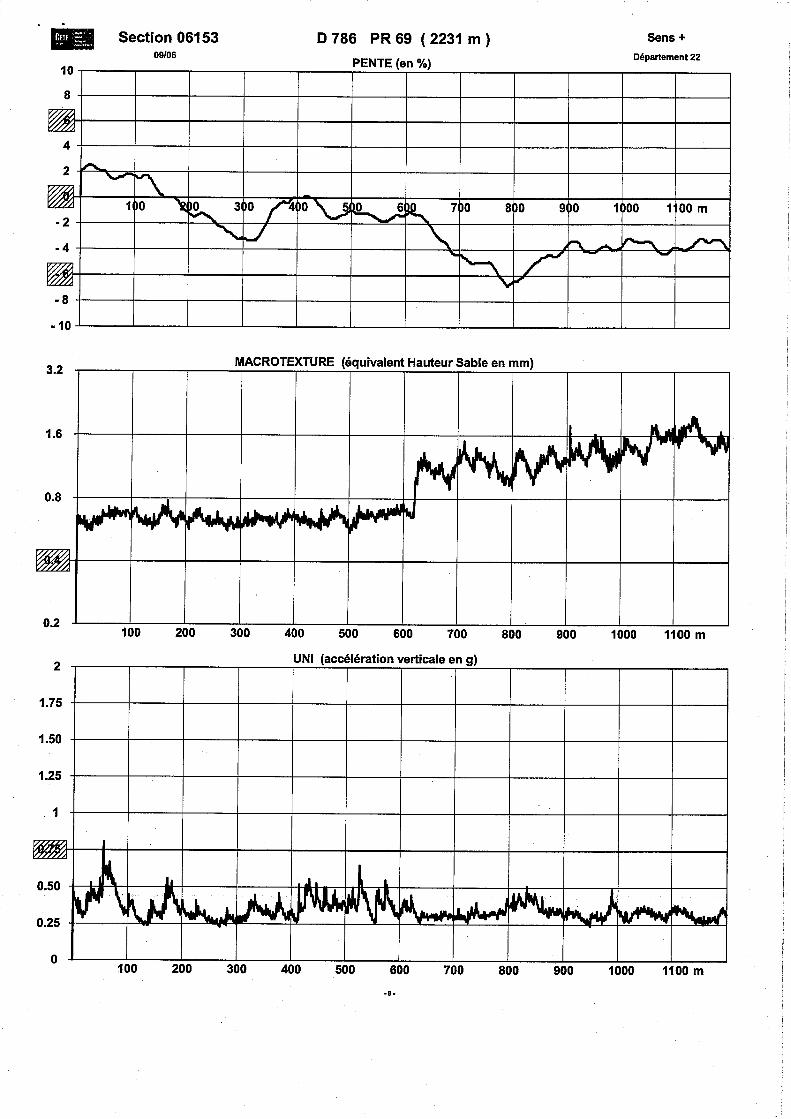
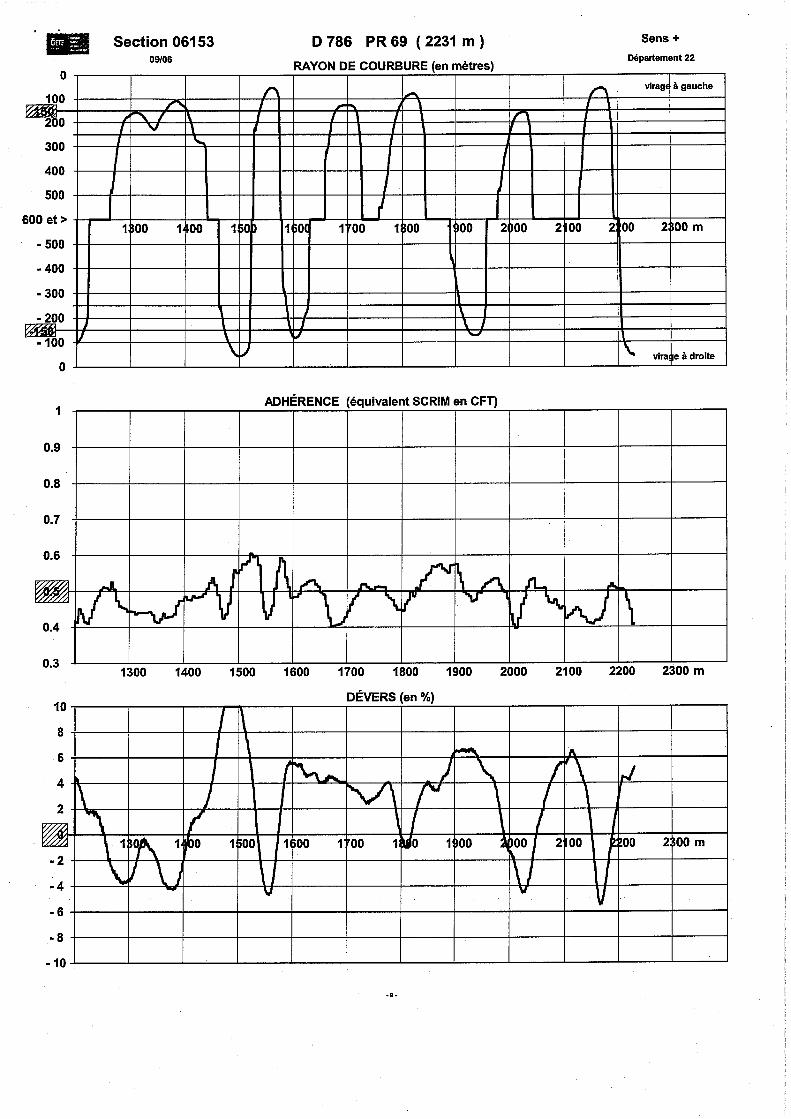
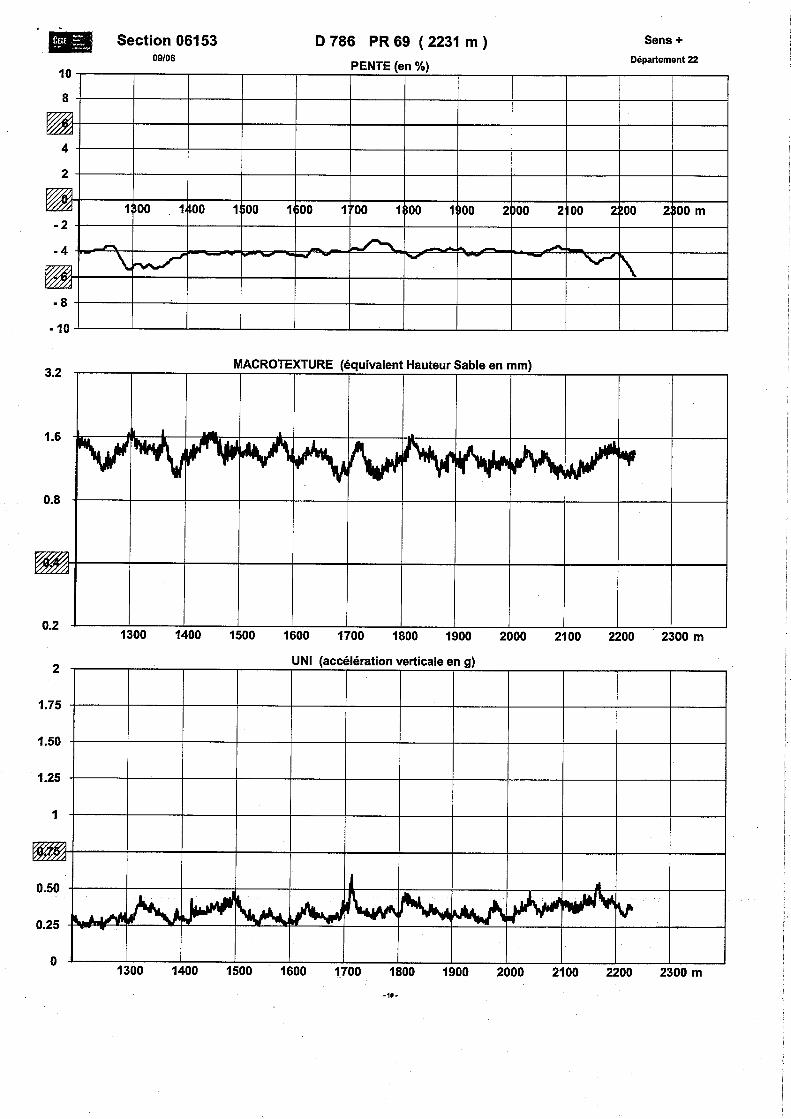
Les caractéristiques géométriques des planches ont été évaluées par l’appareil VANI (voir
photo 3 et fiche matériel en annexe ). Les paramètres géométriques relevés lors des mesures
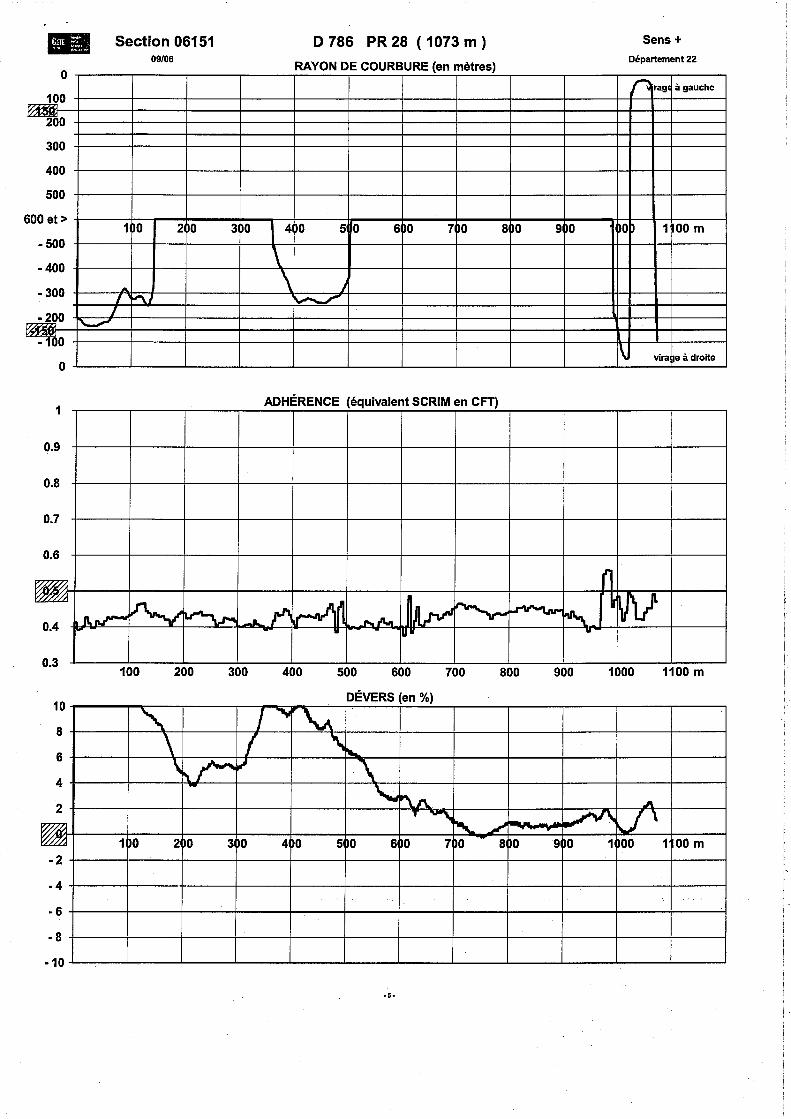
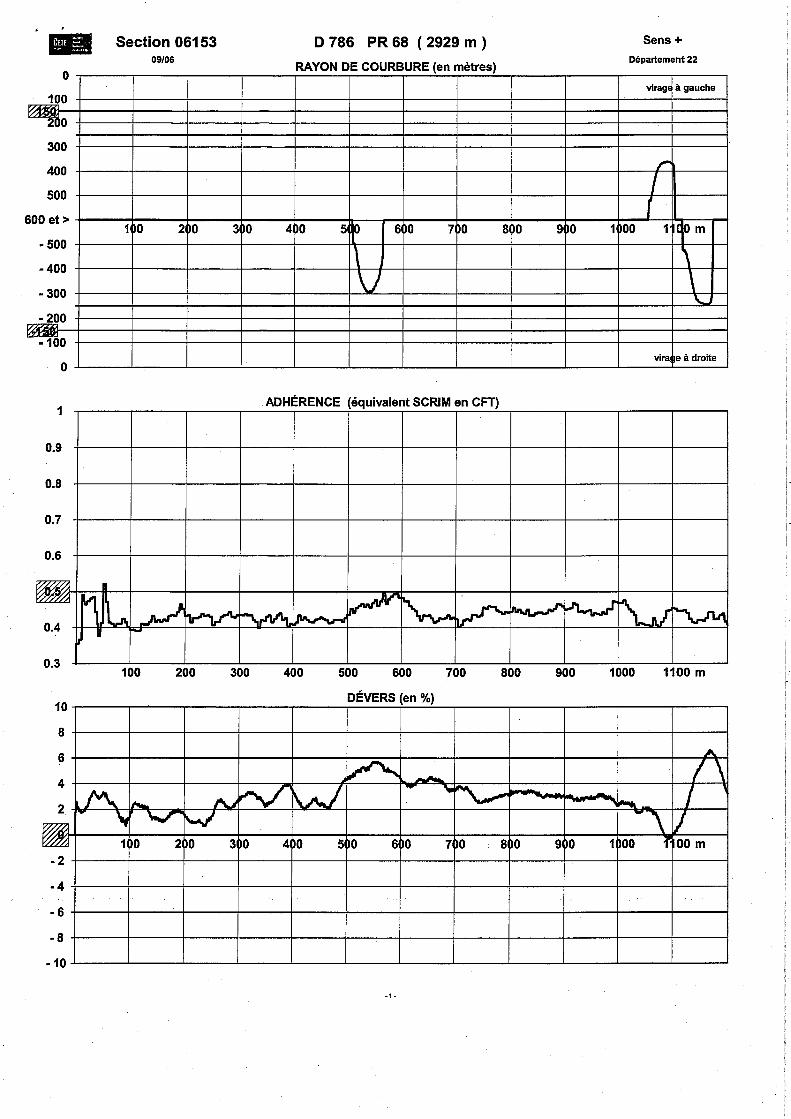
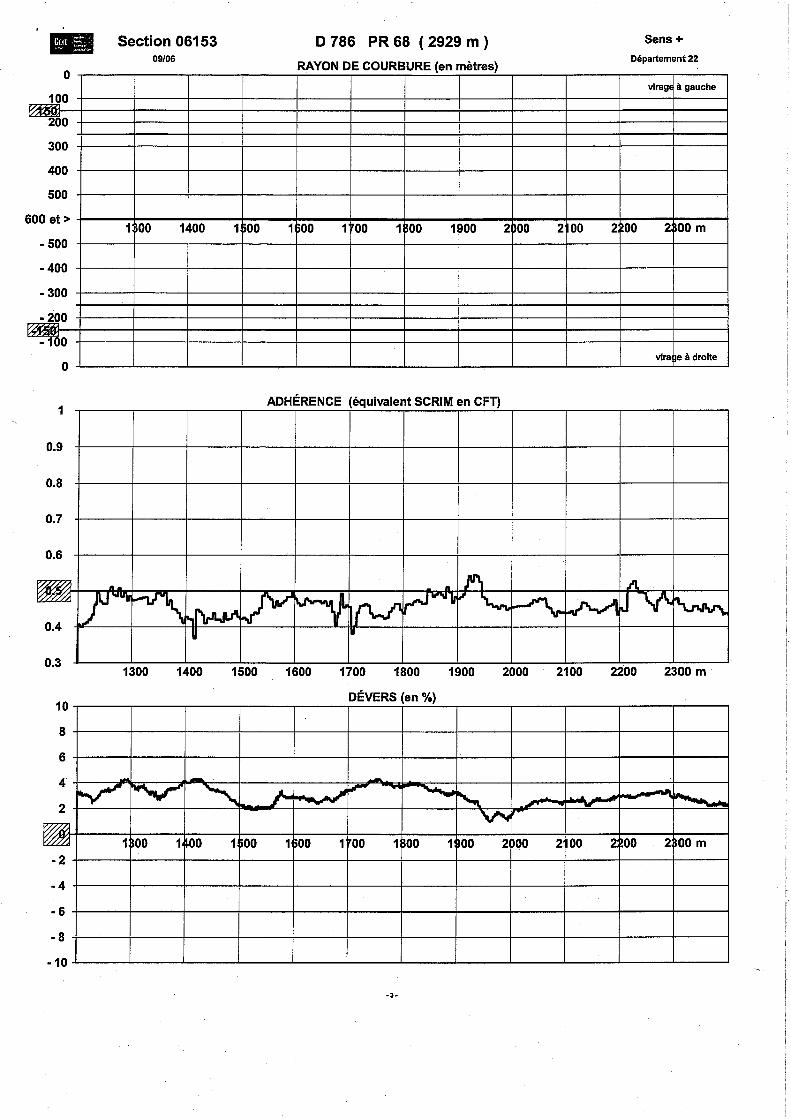
sont le rayon de courbure, les pentes et dévers. Ils sont mesurés au pas de 1 m et restitués sous
forme graphique (voir en annexe). Le rayon de courbure en plan des virages est mesuré à
l’aide d’un gyromètre recalé en ligne droite. Les rayons sont exprimés en m et la plage de
mesures varie entre 20 et 600 m. Au-delà, les rayons sont considérés comme des lignes
droites. Cela a été le cas pour les planches de la piste de Nantes. Par convention, les rayons
des virages à droite sont précédés d’un signe – et les rayons des virages à gauche sont
précédés d’un signe +.
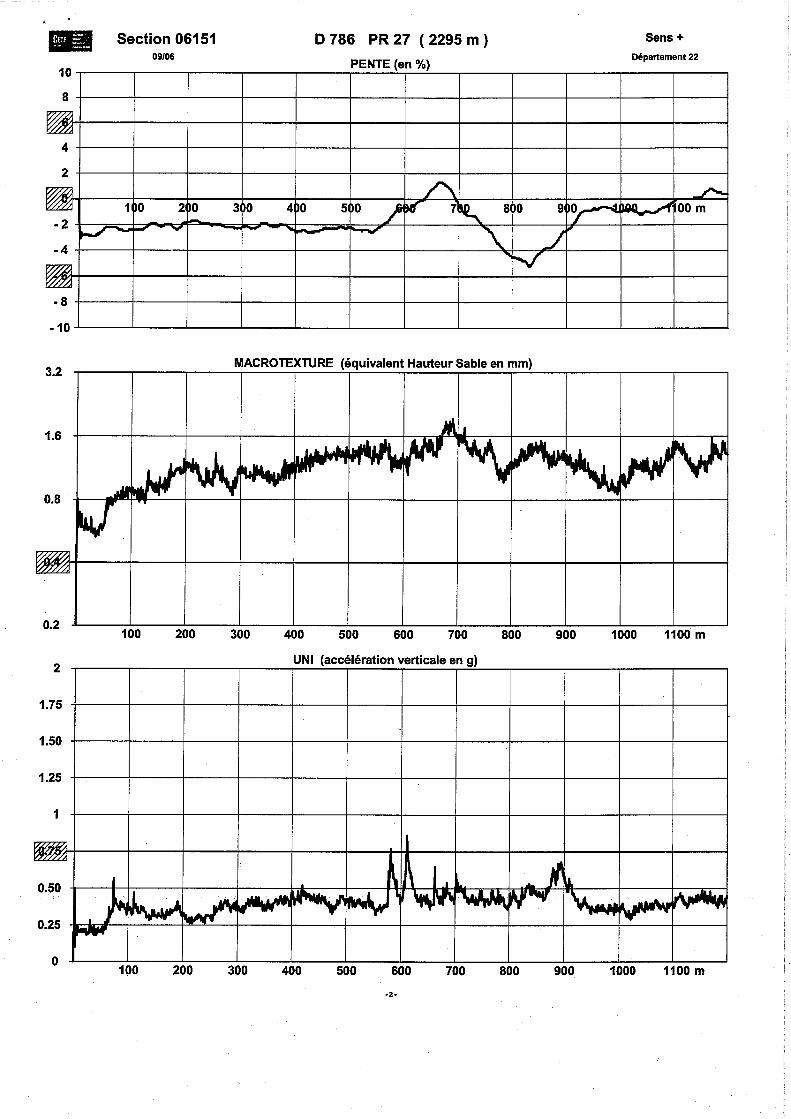
Les pentes et dévers sont mesurés à l’aide d’une centrale gyroscopique à deux axes, associée à
trois lasers permettant de corriger les variations de hauteur de caisse. La plage de mesure est
de + ou - 15 %. Les valeurs sont données à 0,5 % près. Par convention, les pentes en montée
sont précédées du signe + et les pentes en descente sont précédées du signe -. De même par
rapport au sens de marche, les dévers à gauche sont précédés du signe – et les dévers à droite
sont précédés du signe +.
Les caractéristiques de surface également relevées lors des mesures réalisées avec VANI sont
l’adhérence, la macrotexture et le délestage de roue. Elles sont mesurées au pas de 1 m et
représentées sous forme graphique (voir en annexe).
L’adhérence est mesurée à l’aide de l’appareil GRIPTESTER (voir 3.1.1), donnant une
mesure de Coefficient de Frottement Longitudinal (GN voir 3.1.1).
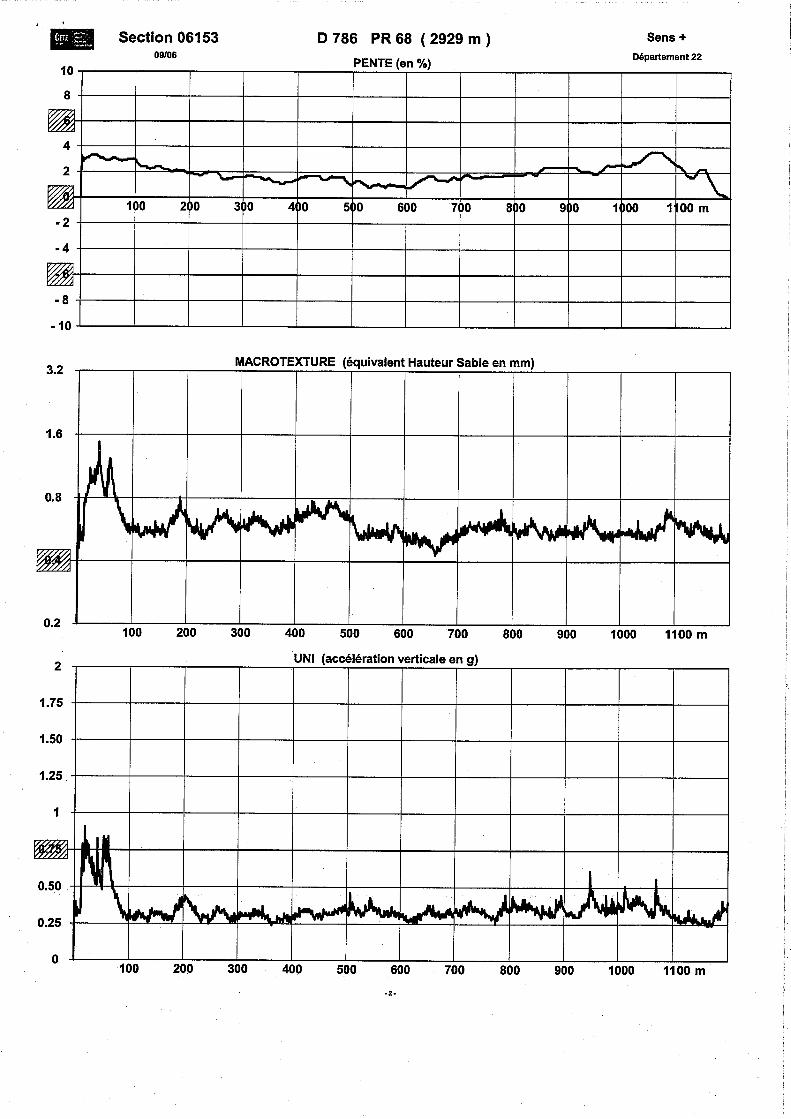
La macrotexture est mesurée à l’aide d’un RUGO, donnant une "PMP" (Profondeur Moyenne
de Profil) (voir 3.2.2).
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
13
Le délestage de roue est mesuré à l’aide d’un accéléromètre, mesurant l’accélération verticale
des masses non suspendues du véhicule. Il correspond à une indication d’uni dans les courtes
longueurs d’onde.
4.2 Mesure de coefficients de frottement avec l’appareil GRIPTESTER (CFL)
Le GRIPTESTER (voir photo 3 et fiche matériel en annexe), fabriqué en Ecosse par la
Société FINDLAY IRVINE, est importé en FRANCE par la Société VECTRA. Cet appareil
mesure les forces de frottement longitudinal entre le revêtement et un petit pneumatique
lisse, selon le principe d'une roue freinée avec un taux de glissement constant, de l'ordre de
15%.
Physiquement l'appareil se présente sous la forme d'une petite remorque autonome
permettant la mesure, l'enregistrement et le mouillage. Il peut être poussé à la main ou tracté
par une voiture à vitesse basse ou modérée, le châssis ne comportant qu'une suspension
sommaire. Les dimensions sont voisines de 1 m de longueur, 0,8 m en largeur, 0,5 m en
hauteur. Sa masse est de 85 kg. Le pneumatique de mesure est de taille 10 x 4-5
conformément à la norme ASTM E 1844-96.
Le mouillage devant la roue de mesure est assuré par une vanne à faible débit à partir de 2
petits réservoirs placés sur l'appareil lorsqu'il est poussé manuellement. Le débit est de
l'ordre de 0,6 l/min à 5 km/h et de 4 l/min à 30 km/h.
Le taux de glissement (15%), générateur de la force d'adhérence est obtenu par
entraînement mécanique entre deux roues porteuses et la petite roue de mesure chargée
d’environ 19 daN. La mesure est réalisée en continu sur une trace aussi rectiligne que
possible.
L'axe de la roue de mesure est équipé d'un système de jauges de contraintes permettant la
mesure de la force verticale Fv et de la force horizontale Fh. Le CFL mesuré par l’appareil
Griptester, appelé aussi « Grip Number » (GN) est égal au rapport Fh/Fv. Ce coefficient de
frottement longitudinal varie entre 0 et 1. Le pas de mesure est de 1 m.
Cet appareil est utilisé pour des mesures localisées servant le plus souvent dans le cadre
d’études de sécurité réalisées avec l’appareil VANI. Le GRIPTESTER n’est pas adapté aux
mesures à grand rendement ni aux mesures à réaliser à des vitesses trop supérieures à 40
km/h. Cet appareil peut-être utilisé pour l’évaluation de l’adhérence des marquages routiers,
des voies piétonnes et des pistes cyclables.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
14
Des essais croisés sont réalisés chaque année avec ces trois appareils. Les fidélités et
écarts de justesse ont été vérifiés sur 3 planches en mars 2007. Les valeurs résultantes de r
et R ont été les suivantes :
r = 0,039
R = 0,059
La répétabilité et la reproductibilité sur une planche homogène sont respectivement de 4% et
5%.
Un appareil ADHERA recherche est en cours de développement au LRPC de Lyon.
4.3 Mesure de coefficient de frottement avec l’appareil SCRIM (CFT)
L’appareil SCRIM (voir photo 2 et fiche matériel en annexe), conçu par le TRL et fabriqué par
la société britannique WDM, mesure un CFT en continu (normes NF P 98-220-3 et NF P 98-
220-4 ).
− Le SCRIM est un camion équipé d’une citerne de 6000 litres et portant une roue de
mesure sur le côté droit. Les mesures sont effectuées dans le flot de la circulation, sur la
bande de roulement droite, partie de la chaussée la plus sollicitée par le trafic. Elles
nécessitent la présence d’un chauffeur et d’un opérateur. La roue de mesure fait un angle
de 20° avec la direction de la vitesse du véhicule. Le taux de glissement utilisé est donné
par la formule G = sin 20° = 34%. Le pneu d’essai est un pneu lisse de 76 x 508 avec une
dureté et une résilience standardisées. Il est chargé par une masse de 200 kg pouvant se
déplacer verticalement (indépendamment des mouvements du véhicule). L’eau est
distribuée juste devant la roue de mesure. La hauteur d’eau ainsi répandue correspond à
environ 0,5 mm. Dans les conditions standard d’essai, l’autonomie maximale est de 100 km.
Le CFT (Coefficient de Frottement Transversal) est mesuré en continu par le SCRIM à
60 km/h avec un mouillage autonome de la chaussée (hauteur du film d’eau de 0,5 mm). Ce
coefficient varie entre 0 et 1. Il correspond au rapport entre la force transversale qui s’exerce
sur la roue de mesure envirée de 20° pour la réaligner avec l’axe du véhicule et la charge
verticale à la roue de 200 kg. Le pas de mesure est de 10 m ou 20 m.
Cet appareil est principalement utilisé pour des mesures à grand rendement (suivi de
réseaux en particulier).
Depuis juin 2004 il existe trois appareils SCRIM opérationnels en France. Un appareil géré
par la société VECTRA et deux appareils gérés par le LRPC de Lyon.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
15
Des essais croisés sont réalisés chaque année avec ces trois appareils. Les fidélités et
écarts de justesse ont été vérifiés sur 5 zones en novembre 2006. Les valeurs résultantes de
r et R ont été les suivantes :
r = 0,047
R = 0,066
La reproductibilité des mesures a également été établie au Royaume-Uni avec des SCRIM
sortant de révision. Elle est comprise entre +/- 0,03 et +/- 0,05 (à 95%) pour une surface
présentant un niveau de CFT de 0,50.
Les mesures ont été réalisées sur les deux sites à 60 km/h dans le sens des PR croissants
et dans le sens des PR décroissants. Pendant la durée de l’expérimentation ces mesures
seront répétées tous les 6 mois afin d’évaluer les fluctuations de l’adhérence en fonction des
périodes de l’années (variations saisonnières).
4.4 Mesure de macrotexture avec le RUGO (PMP et PTE) L’appareil RUGO, matériel mlpc, utilise une méthode profilométrique pour obtenir par
calcul la profondeur moyenne des aspérités de surface. Il s’agit d’une méthode dynamique
(vitesses de 30 à 100 km/h). L’indice déterminé est la « Profondeur Moyenne du Profil :
PMP » (Norme NF EN ISO 13473-1).
L’appareil se compose, en particulier, d’un émetteur à rayon laser et d’un potentiomètre
optique. Le rayon émis frappe la surface du sol et se réfléchit sur le potentiomètre optique.
En fonction de la position du point illuminé sur ce potentiomètre, on déduit la hauteur du
point de réflexion au sol. La mesure s’effectue en continu, dans le trafic, à une vitesse
pouvant atteindre 100 km/h.
Cet ensemble est fixé à 30 cm du sol et l’étendue de mesure est de plus ou moins 6 cm par
rapport à un point neutre de la chaussée.
Un micro-ordinateur pilote l’ensemble et reçoit à la fréquence d’environ 16 000 Hz une
succession de hauteurs relatives de points de la chaussée sur une ligne parallèle à
l’avancement du véhicule. Le cycle de mesure se répète tous les 25 cm. Sur ces 25 cm, 100
prélèvements sont répartis uniformément sur 100 mm. Ces 100 prélèvements sont traités
pour donner une valeur caractéristique de la macrotexture du revêtement. Tous les 40
cycles, pour un pas de 10 m, ou tous les 80 cycles, pour un pas de 20 m, le système calcule
et enregistre la valeur moyenne des valeurs unitaires précédentes.
Le système enregistre en continu la distance parcourue pendant la mesure et permet le
repérage des mesures le long d’un itinéraire. Les informations vitesse, repérages et
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
16
macrotexture sont regroupées pour constituer un fichier de résultats archivé instantanément
sur le disque dur du micro-ordinateur.
Les résultats des mesures sont présentés graphiquement. La bonne corrélation existant
entre les valeurs PMP et les valeurs de « PMT » (anciennement Hauteur au Sable vraie
HSv) notion assez familière aux ingénieurs routiers, permet de donner le résultat directement
en PTE (Profondeur de Texture Equivalente anciennement Hauteur au Sable calculée HSc).
La norme propose la loi informative suivante : PTE = 0,8xPMP + 0,2. Il est aussi possible
d’utiliser la loi informative PTE = PMP. La loi « plancher » proposée dans la méthode d’essai
des LPC n°50 est PTE = 1,1*PMP.
La répétabilité en PMP est de l’ordre de 3%, la reproductibilité de 5%.
Des essais croisés ont été réalisés avec 3 RUGO sur les planches de la piste du LCPC et
des sections routières fin 2005. Les fidélités et écarts de justesse ont été vérifiés sur 9
zones. Les valeurs résultantes de r et R ont été les suivantes :
r = 0,054
R = 0,080
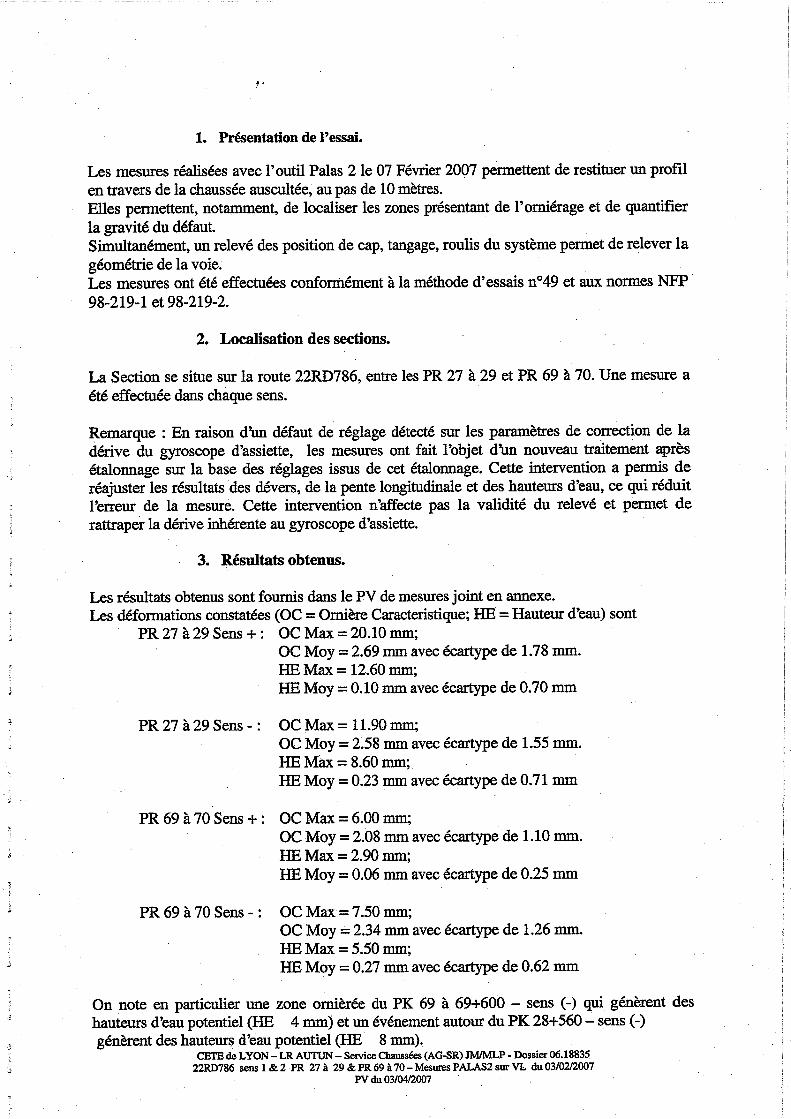
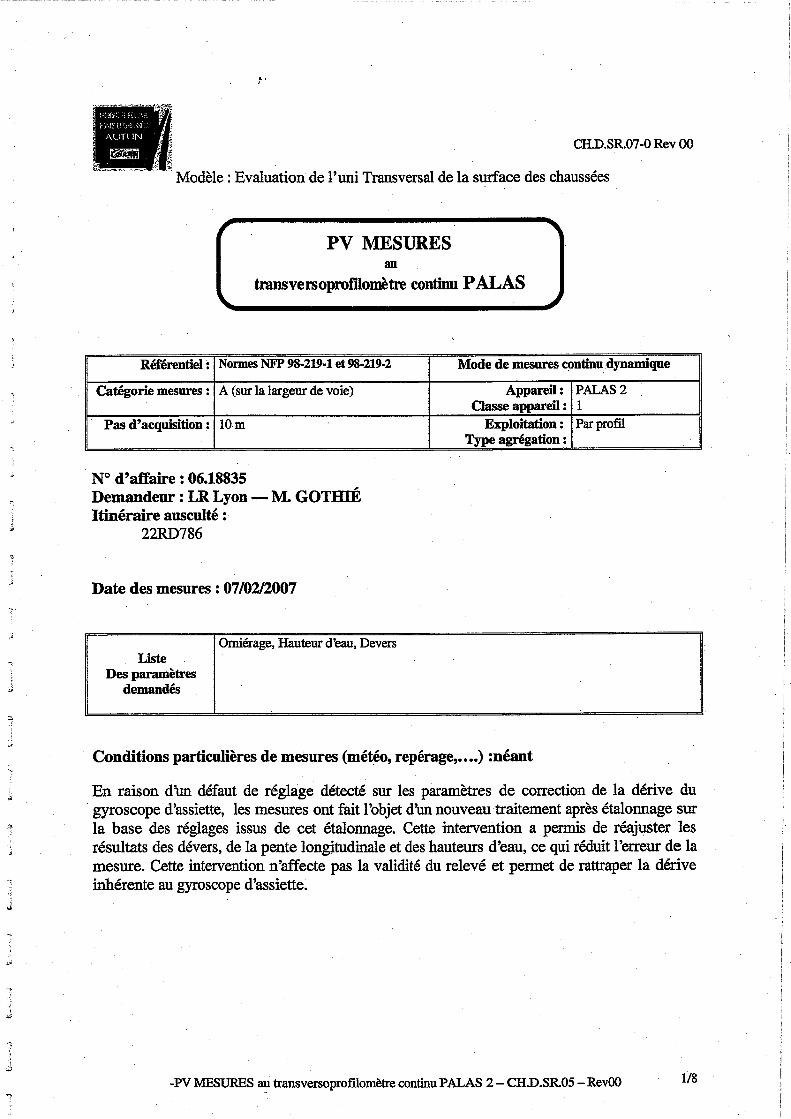
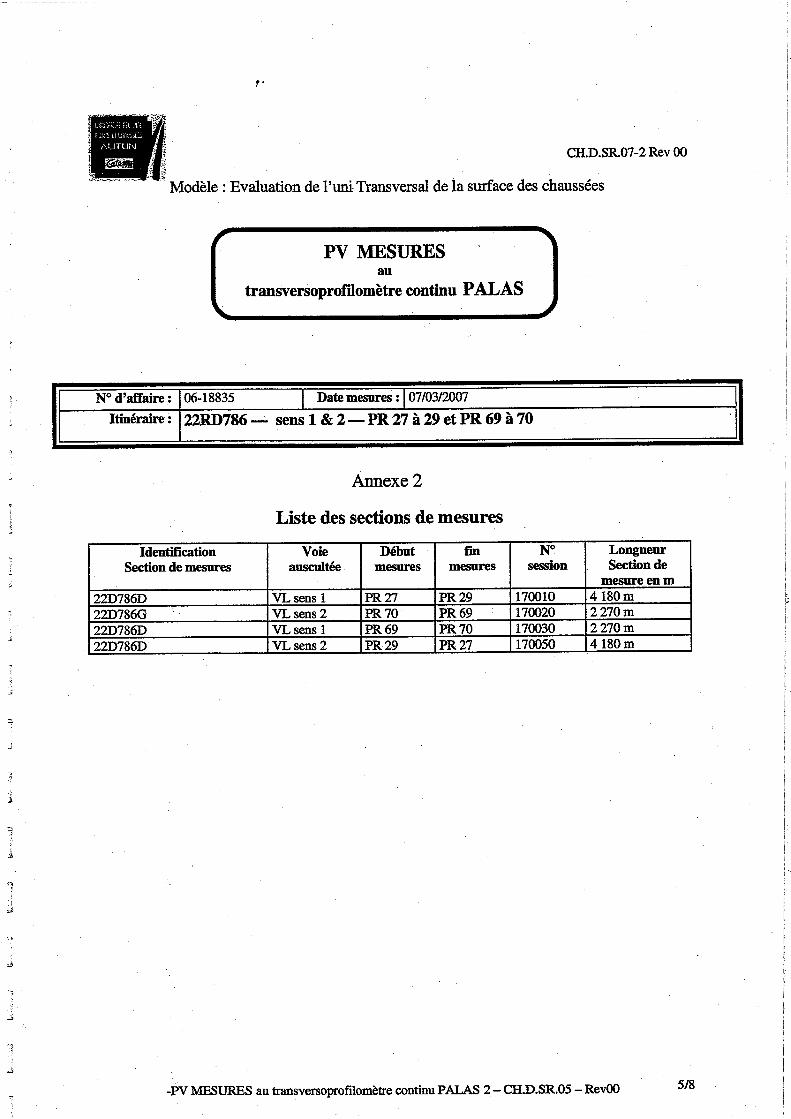
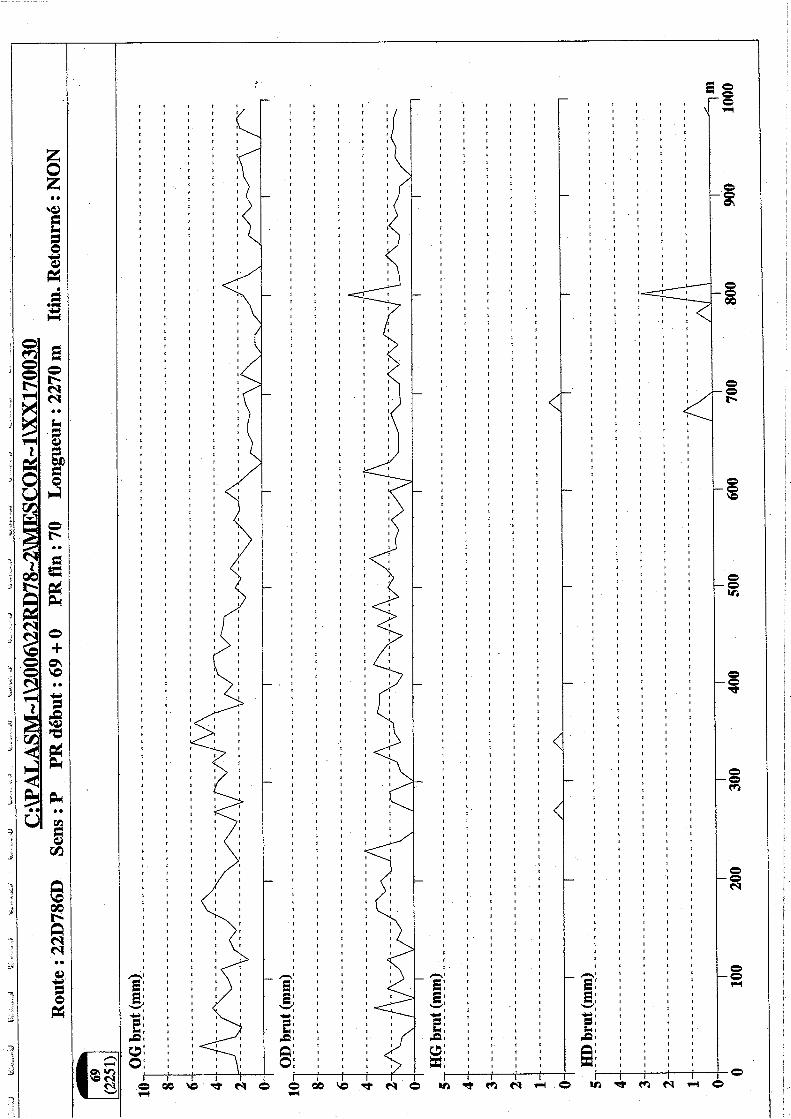
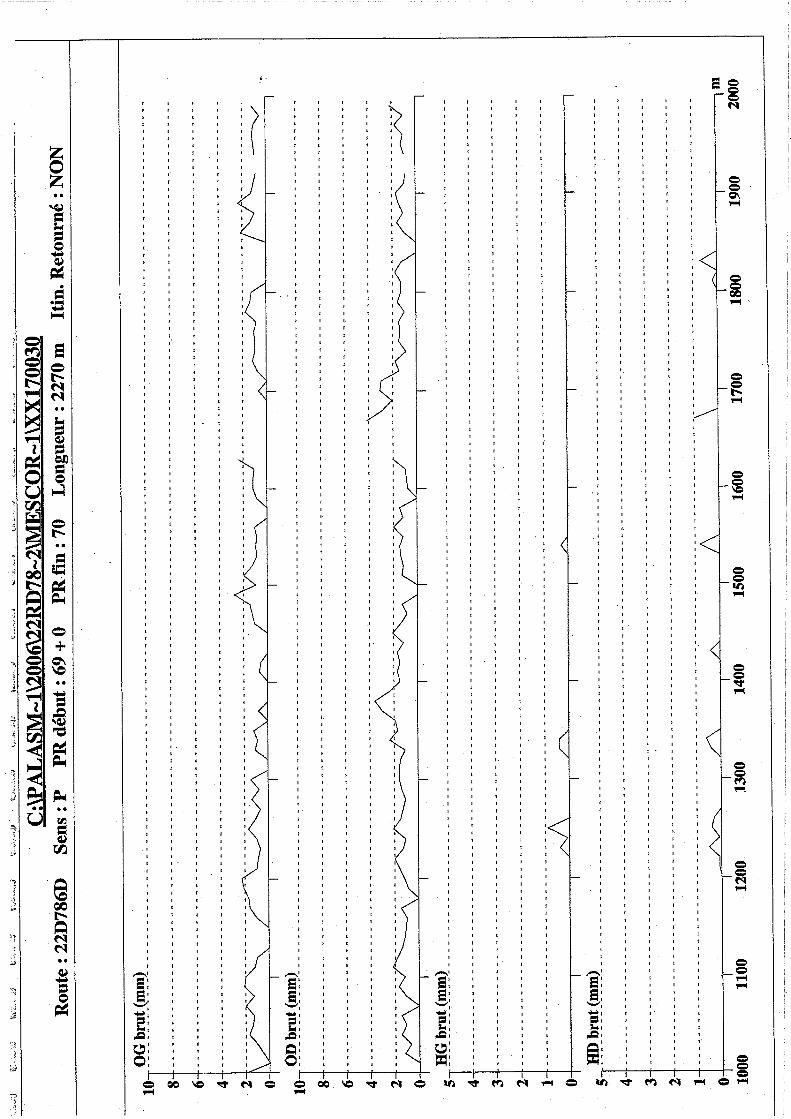
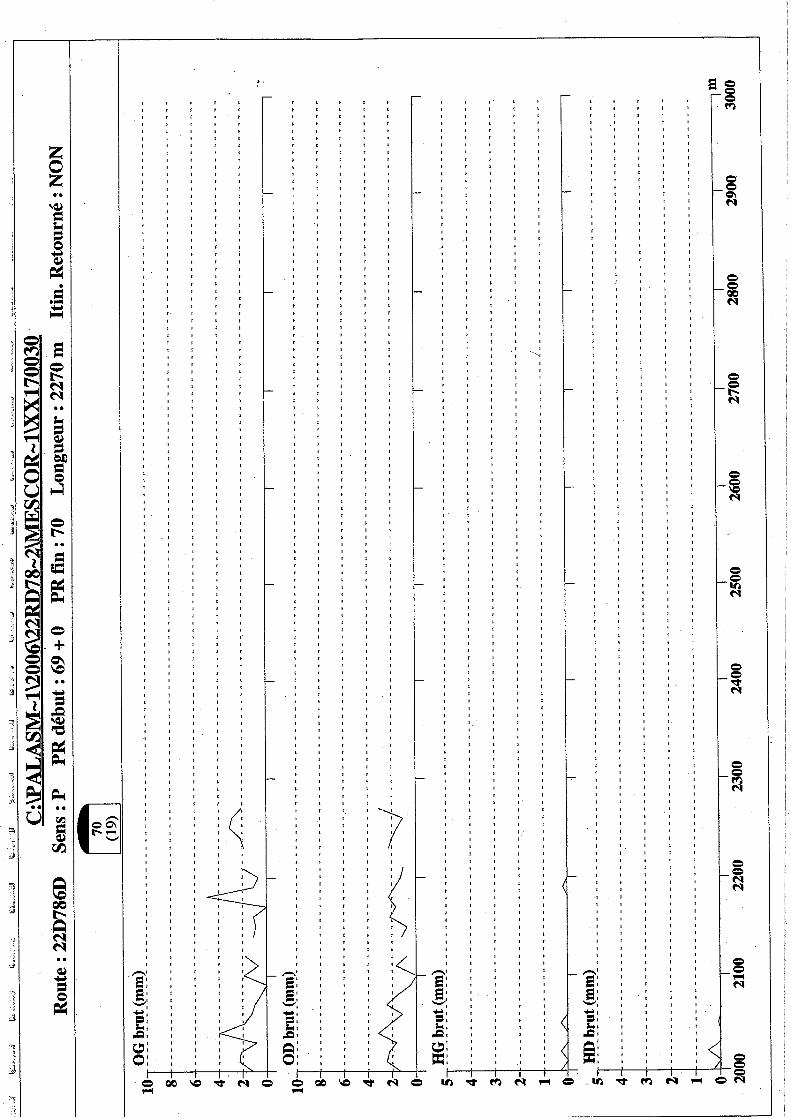
4.5 Mesure de l’uni transversal avec le PALAS 2 Le transveroprofilographe laser permet de mesurer sans contact le profil en travers des
chaussées, à vitesse élevée (jusqu’à 90 km/h), tous les 10 m en temps réel, sur une largeur
de 4 m, sans débordement de matériel hors du gabarit du véhicule porteur. Cet appareil
permet en particulier :
- de mesurer les profondeurs et largeurs d’ornière, des déformations en rives et hors
rives, ainsi que du bombement,
- de faire des prévisions de hauteurs d’eau dans les ornières mais aussi sur des zones
de retenue d’eau,
- de déterminer le dévers moyen et le rayon en plan du tracé.
Les profils relevés par l’appareil peuvent être restitués par lot de 100 m sur une largeur de 4
m. Ces profils permettent de visualiser la forme et l’amplitude des déformations (orniérage
en particulier).
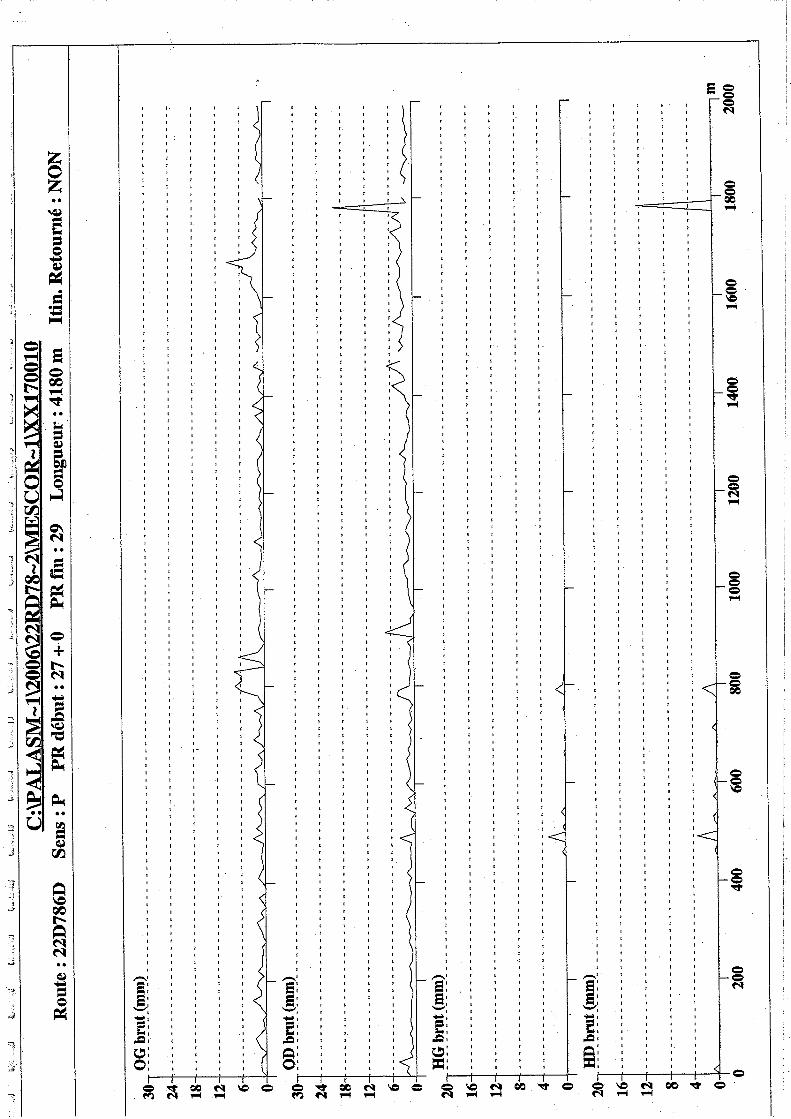
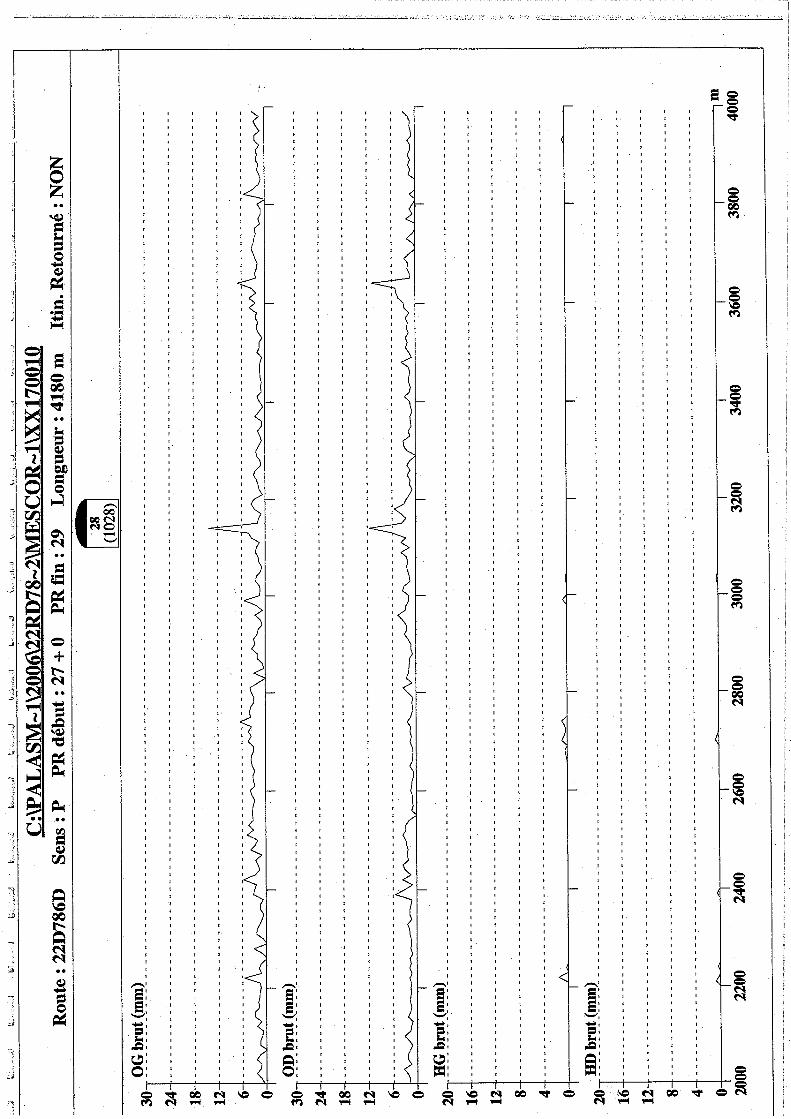
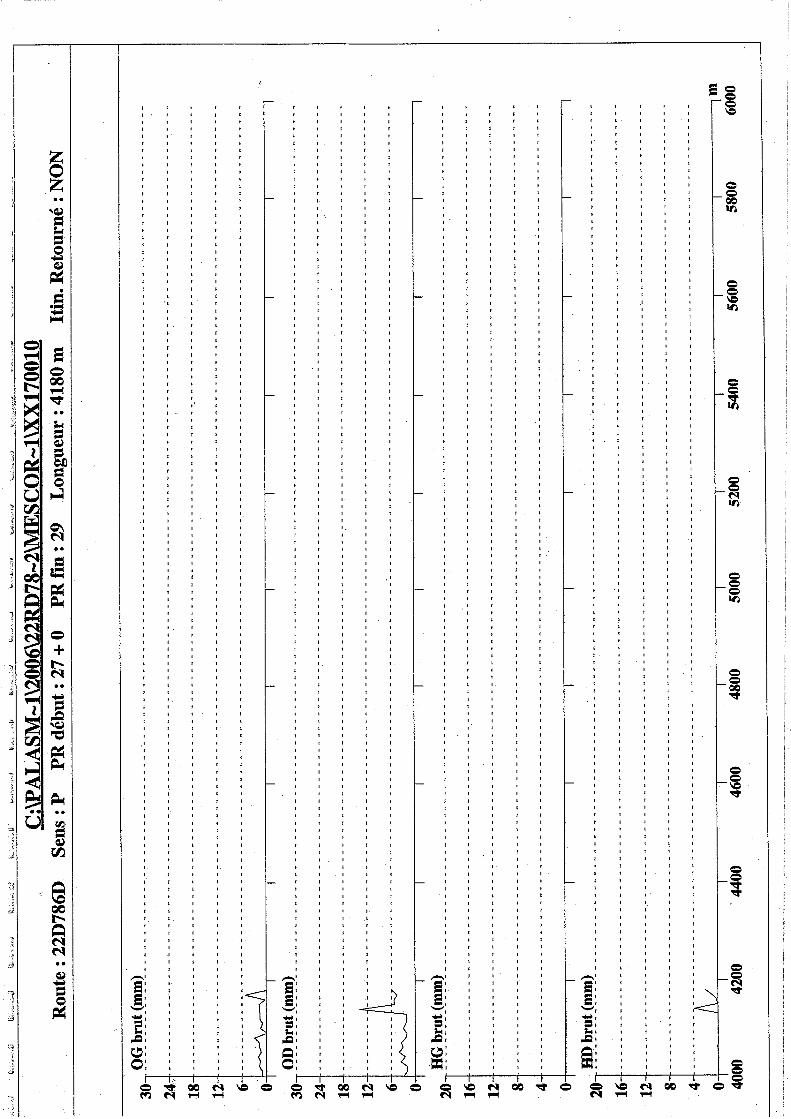
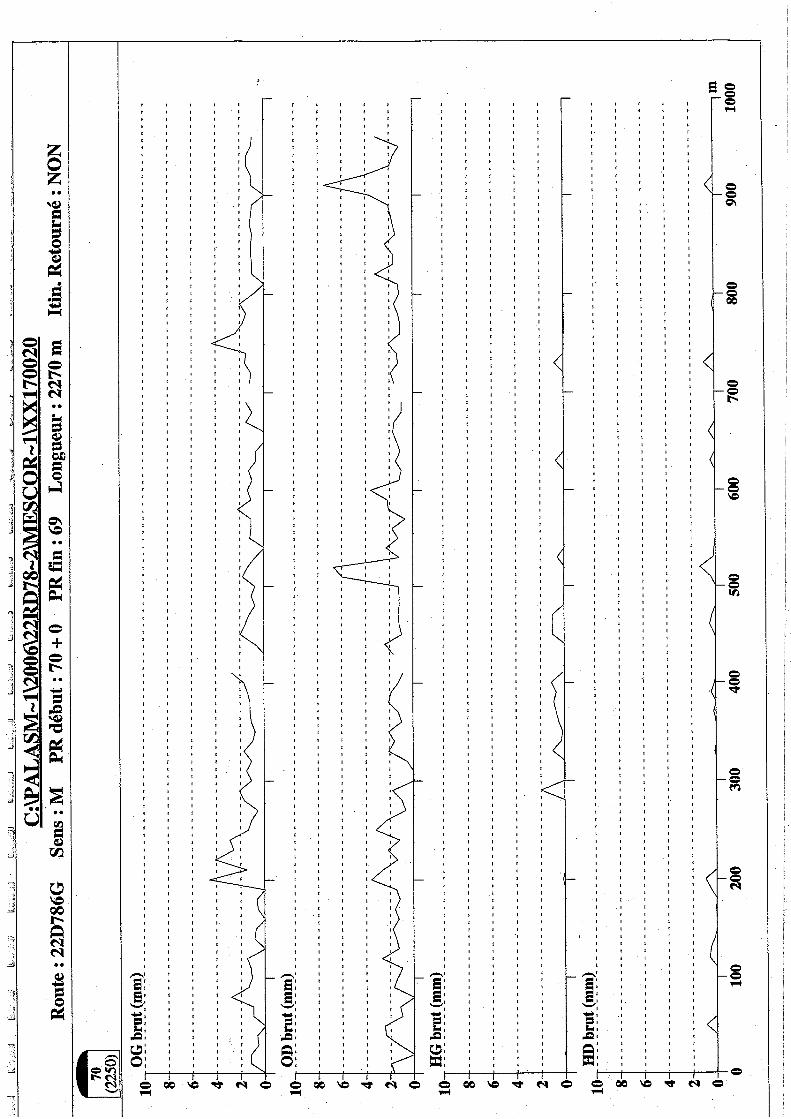
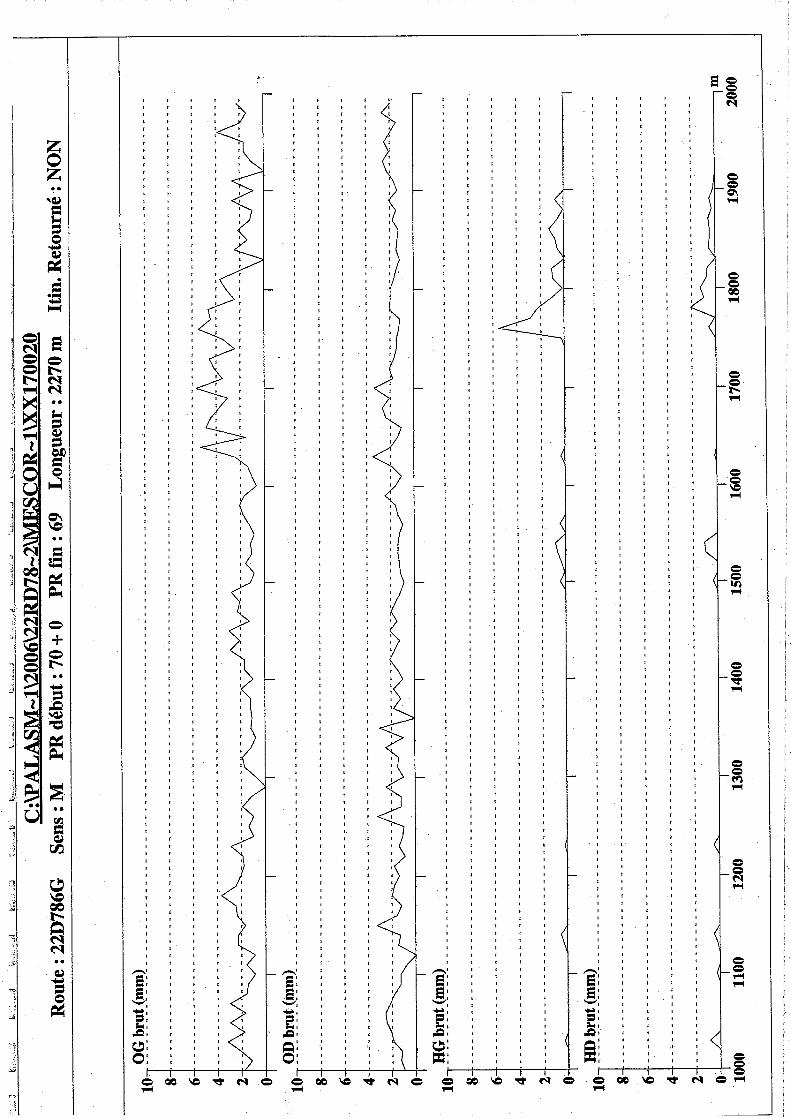
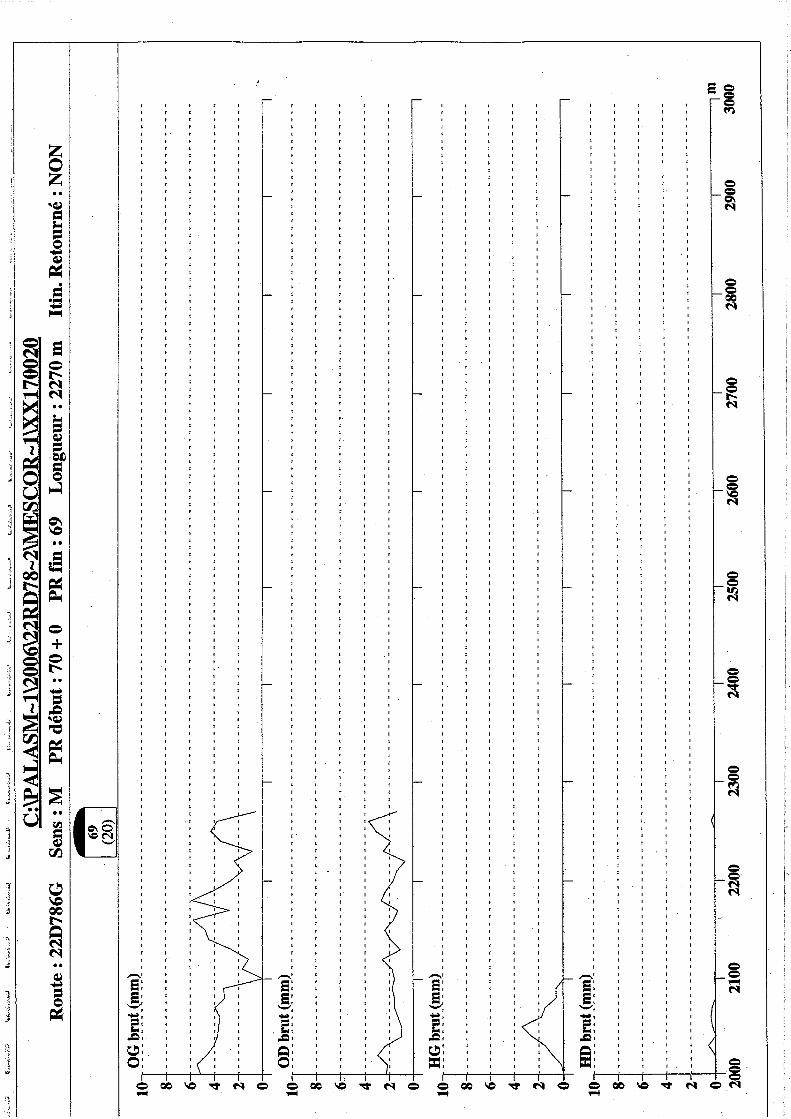
Dans ce livrable, seules les mesures de profondeur d’ornières et les calculs de hauteur d’eau
ont été reportés. Un dossier complet des mesures réalisées par PALAS 2 sue les deux sites
est disponible.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
17
5. Démarche proposée par le CETE de Lyon
Des mesures de caractéristiques de surface sont réalisées sur la section concernée.
Ces mesures réalisées avec des appareils à grand rendement ( SCRIM pour l’adhérence et
la texture et VANI pour les caractéristiques géométriques) permettent d’obtenir les
paramètres suivants :
- l’adhérence conventionnelle avec fourniture d’un CFT tous les 10 ou 20 m
- la Macrotexture; avec la fourniture d’un PMP tous les 10 ou 20 m
- Les caractéristiques géométriques de la section avec :
o La pente
o Le dévers
o Le rayon de courbure
o Une information sur l’uni dans les courtes longueurs d’ondes
En utilisant les relations établies dans le cadre du programme APTP (Accidents part temps
de pluie) du PREDIT (rapport Robert Guillemin de Mars 2001: projet VERT, Prédit APTP)
(1)
Avec :
TA: Taux d’augmentation des hauteurs d’eau en mm*100 par mètre d’écoulement et
par mm/h de pluie supplémentaire
Macrotexture en mm
d dévers en %
Et la hauteur d’eau est alors calculée par la formule :
)(071,0)(85,057,0 dxreMacrotextuxTA −+=
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
18
H = IxTAxL (2) Avec :
L = la longueur d’écoulement
I = l’intensité de la pluie en mm/h
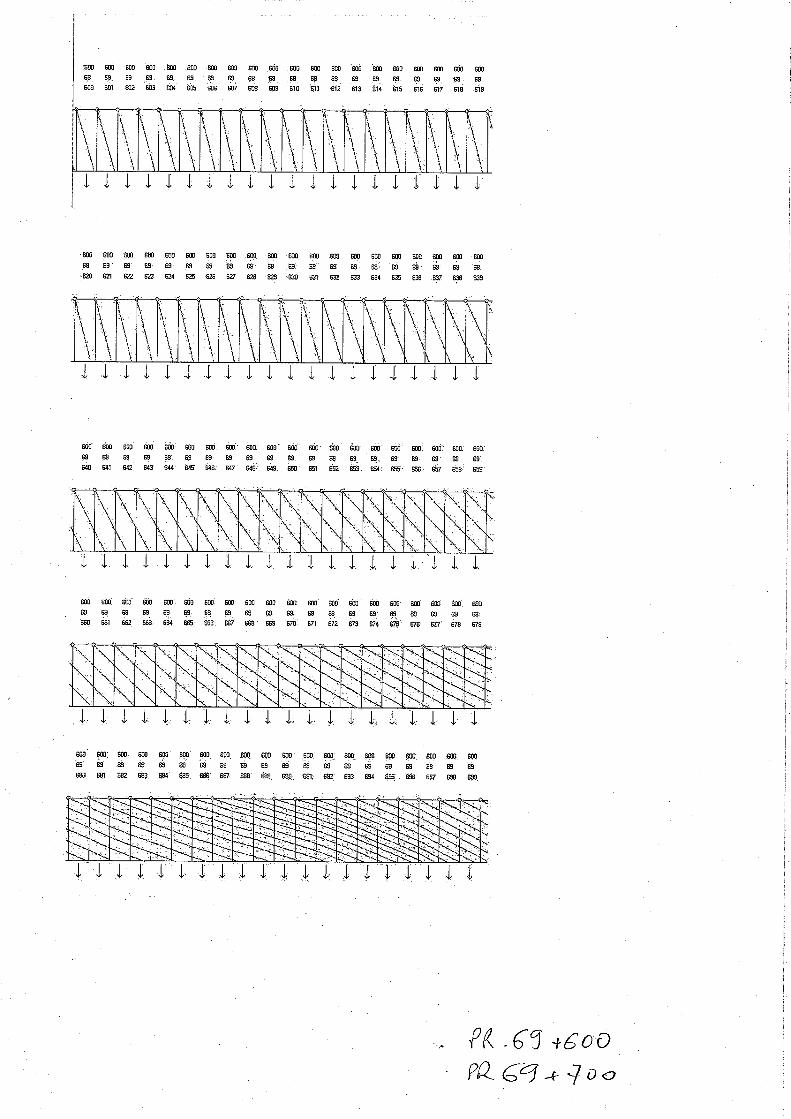
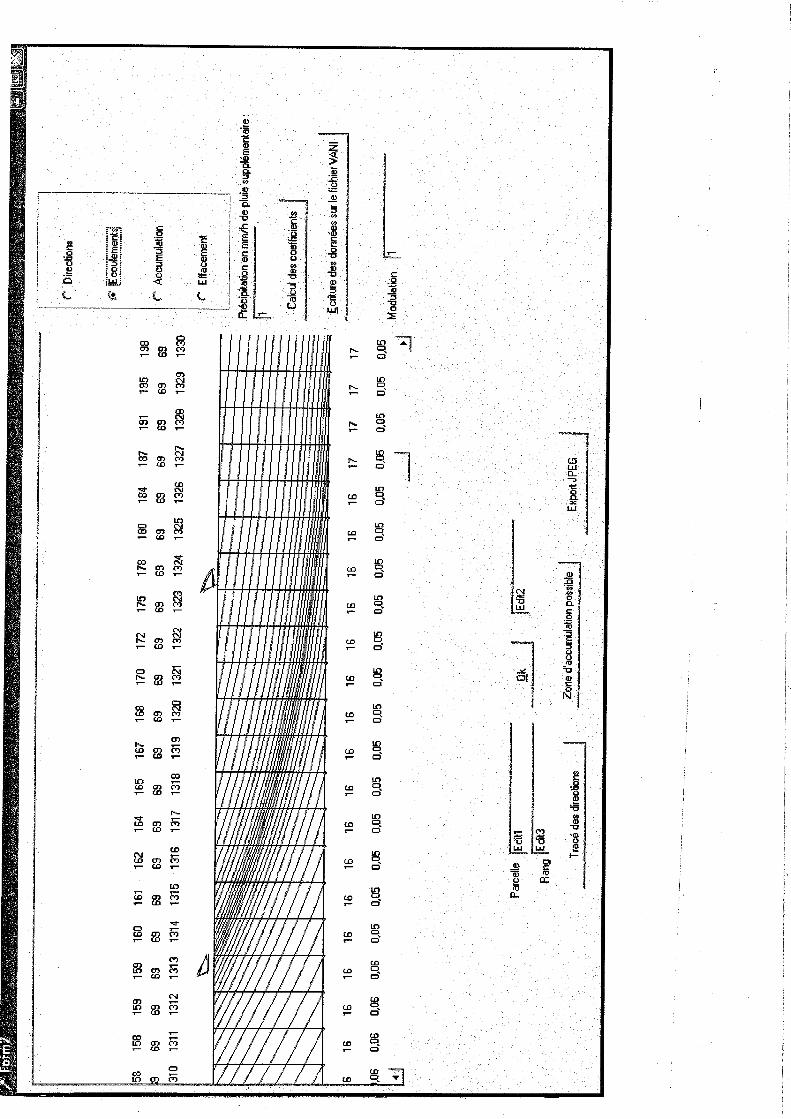
En fonction des paramètres géométriques de la surface routière, une détermination des
lignes d’écoulement a été effectuée par composition des vecteurs pentes. La voie de
circulation a ainsi été décomposée en éléments de 1 m de long. La résultante des vecteurs
pente longitudinale et dévers a été tracée pour chacun de ces éléments. La ligne
d’écoulement a été ainsi tracée en partant du point le plus haut des éléments de 1 m de
long. La hauteur d’eau calculée au point de sortie de cette ligne a été affectée au point
d’entrée dans l’élément suivant et ainsi de suite jusqu’à ce que la ligne d’écoulement sorte
de la voie. Chaque élément de 1 m est ainsi traversé de plusieurs lignes d’écoulement. Le
logiciel affecte alors à la surface de l’élément de 1 m une hauteur d’eau égale à la valeur la
plus élevée des lignes d’écoulement qui le traverse.
Ce calcul a été effectué pour les deux sections étudiées.
Les hauteurs d’eau ont été calculées pour différentes intensités de pluie (25, 15, 5 mm/h).
Ces hauteurs d’eau ont alors été utilisées pour calculer un CFT mobilisable. La formule
utilisée a été établie à la suite des essais réalisés dans le cadre du projet VERT. La vitesse
est un élément important pour cette influence de la hauteur d’eau. Nous avons retenu une loi
de variation moyenne.
(3)
Pour le calcul du H on a tenu également compte de l’orniérage éventuellement présent sur
les deux sections étudiées. Des mesures ont été réalisées avec l’appareil PALAS2 du LRPC
d’Autun. Le logiciel d’exploitation de ces mesures permet de calculer une hauteur d’eau dans
l’ornière fonction de la forme de l’ornière et de la valeur du dévers.
Ensuite est réalisée le calcul d’une vitesse de stabilité en virage à partir de la formule
théorique donnant la force centrifuge (F = mxw²xR)
CFTmobilisable = -0,081*Ln(H) + (CFT-0,05)

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
19
(4) •f : fonction de l ’adhérence •d: dévers en décimale
•g: accélération de la pesanteur (9,81 m/s²)
•R: rayon de courbure en m
Pour rééquilibrer les influences réelles en virage de l’adhérence et du dévers, nous avons
retenu pour f la valeur CFT/3, le coefficient 3 étant proposé dans plusieurs études [1].
Nous avons ainsi obtenu la formule suivante :
Un calcul des vitesses limites liées au profil en long et en plan est ensuite réalisé. La
distance de visibilité a été estimée à partir des images VANI. On a ensuite utilisé une formule
simple reliant la distance d’arrêt à la vitesse et l’adhérence :
D = Vv²/2g.A
-D distance d’arrêt en m -V vitesse en m/s
-g accélération de la pesanteur (9,81 m/s2)
-A adhérence (valeur de 0 à 1)
De cette formule on obtient la vitesse limite de passage liée à la distance de visibilité :
RgdfVs ××+= )(
RgdableCFTmobilisVs ××+= )3( (5)
(6)
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
20
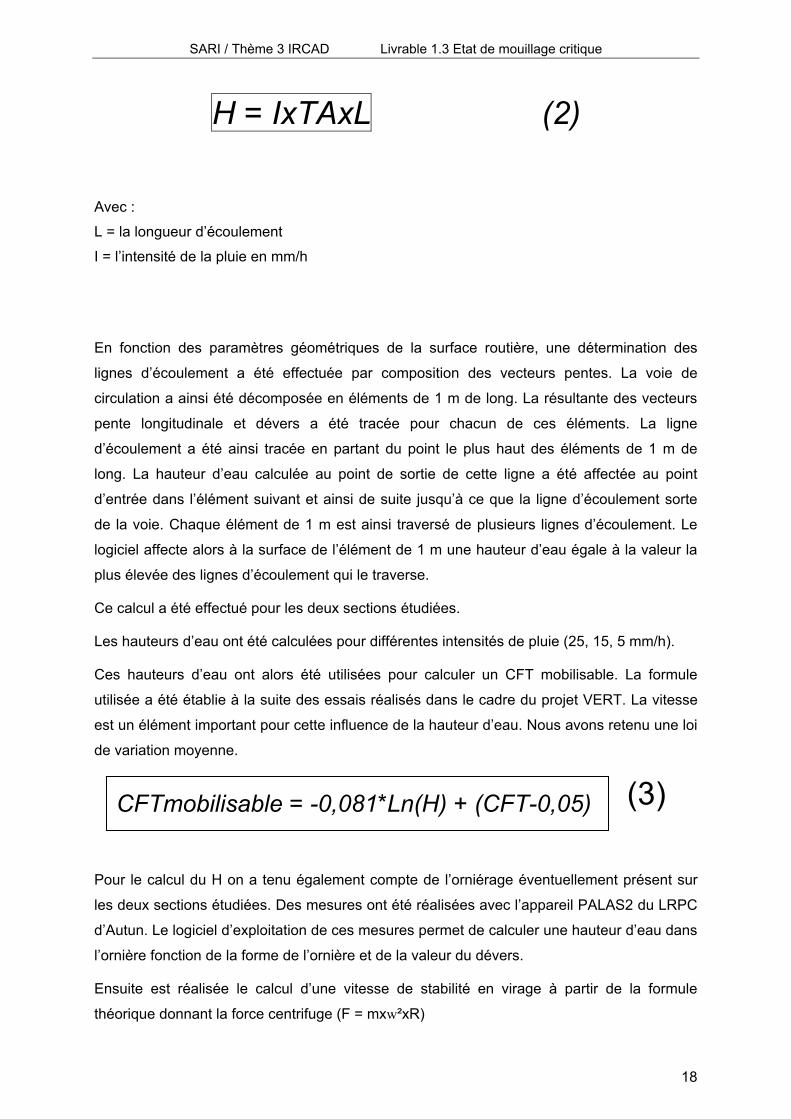
Vv² = D.2g.A La vitesse limite de passage à retenir est alors la plus faible des deux vitesses précédentes
(liées à la géométrie Vs et liée à la visibilité Vv)des hauteurs d’eau pour de pluie
La démarche suivie est résumée dans le diagramme ci après :
Dans le cadre d’une démarche simplifiée, la hauteur d’eau pourrait être mesurée en un point
des sections retenues avec un capteur spécialisé. Au point de mesure, la comparaison entre
la valeur mesurée et la valeur calculée pour différentes intensités de pluie devrait permettre
de recomposer les hauteurs d’eau sur le site et donc de calculer les CFT mobilisables
correspondants. Pour avoir la vitesse de sécurité pour l’ensemble de la section, il
conviendrait à partir de la mesure de hauteur d’eau en un point, de calculer la hauteur d’eau
la plus importante sur la section, d’en déduire le CFT mobilisable et de calculer la vitesse de
stabilité correspondante.
(7)
Dévers Pente
Rayon decourbure
CFT Pluviométrie
Ligne de plus grande pente
Macrotexture
Hauteur d’eauCFT mobilisable
Vitesse limite de passage
Orniérage
Profil en long
Profil en travers
D visibilité
Vitesse visibilitéVitesse stabilité
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
21
6. Hypothèses prises et principaux résultats
6.1 Intensités de pluviométrie retenues
« L’étude expérimentale plus complète (source Yves Delanne), conduite par l’équipe du
LCPC montre que l’apparition du ruissellement (hauteur d’eau > 0,5 mm) est très improbable
dans les cas courants des profondeurs de texture pour les conditions les plus courantes
d’intensité de précipitation (voir tableau ci- dessous).
Pluie
mm/h
Bruine
mm/h
très faible < 0,1 < 0,1
faible 0,1 ≤ I < 2,5 0,1 ≤ I < 0,25
modérée 2,5 ≤ I < 7,5 0,25 ≤ I < 0,5
Forte ≥ 7,5 ≥ 0,5
Tous les essais ont été faits avec un portique de mouillage avec une alimentation continue
en eau donc avec une précipitation stabilisée.
Les modèles ont été établis à partir d’essais en précipitation continue or, l’intensité de
précipitation est extrêmement variable, en conséquence leur validité « opérationnelle » est
limitée.
Devant les faibles valeurs de pluviométrie indiquées dans le tableau, nous avons proposé de
ne retenir que 2,5 et 7,5 mm/h. En effet sur les deux sites les calculs de hauteurs d’eau
réalisés avec des pluviométries inférieures à 5 mm/h ont donné des hauteurs d’eau très
faibles qui ne conduisaient pratiquement jamais à des CFT mobilisables inférieurs à ceux
mesurés par le SCRIM. Pour les intensités plus faibles on a conservé comme CFT
mobilisable celui qui avait été mesuré par l’appareil SCRIM.
6.2 Principaux résultats
Les résultats des mesures réalisées avec les appareils VANI, SCRIM et PALAS 2 sont
reportés en annexes.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
22
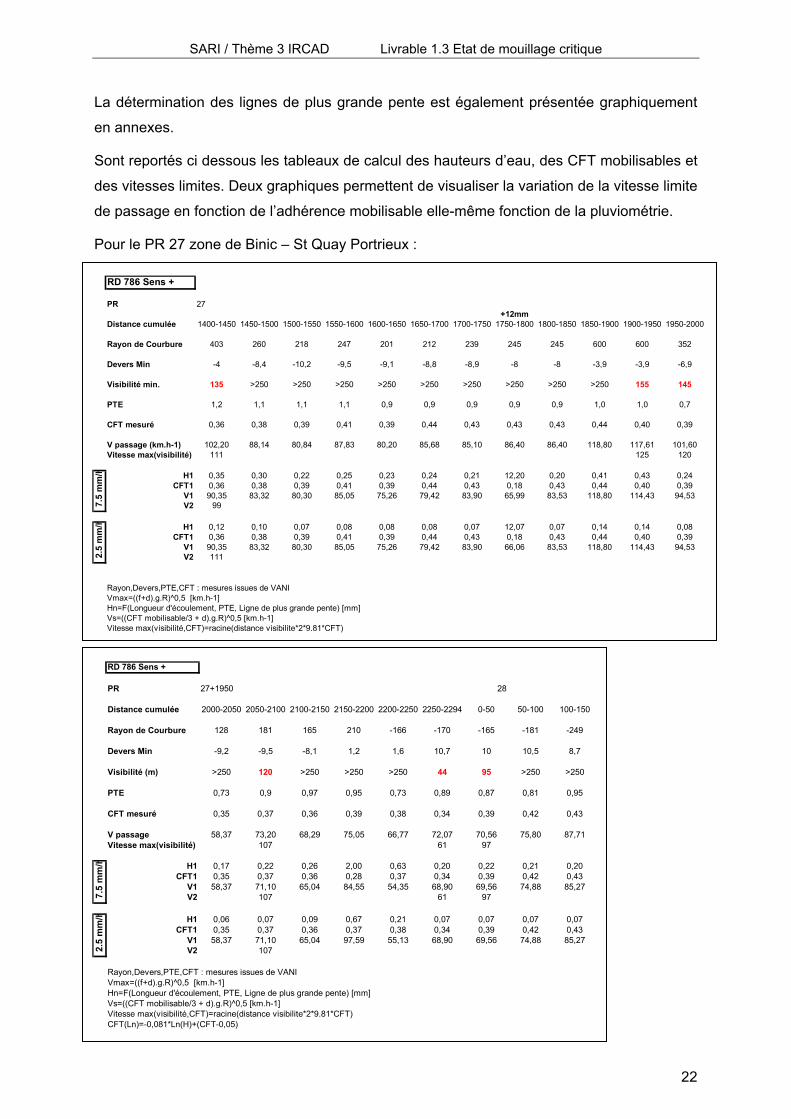
La détermination des lignes de plus grande pente est également présentée graphiquement
en annexes.
Sont reportés ci dessous les tableaux de calcul des hauteurs d’eau, des CFT mobilisables et
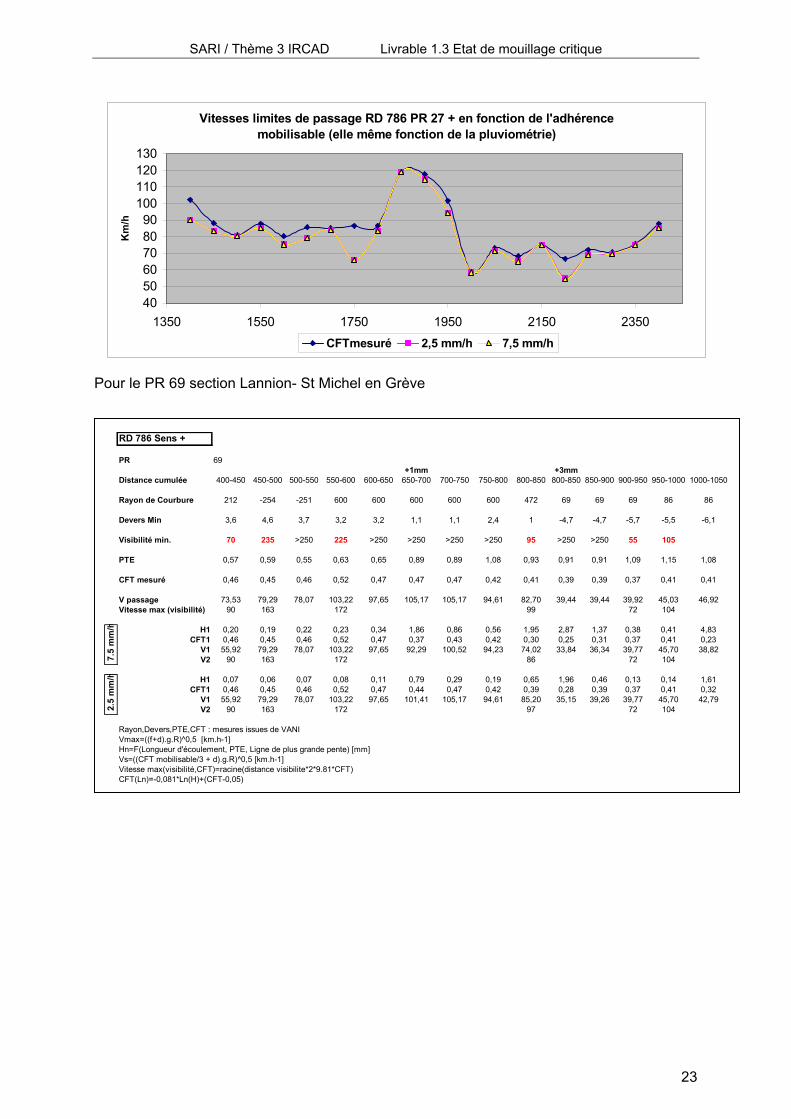
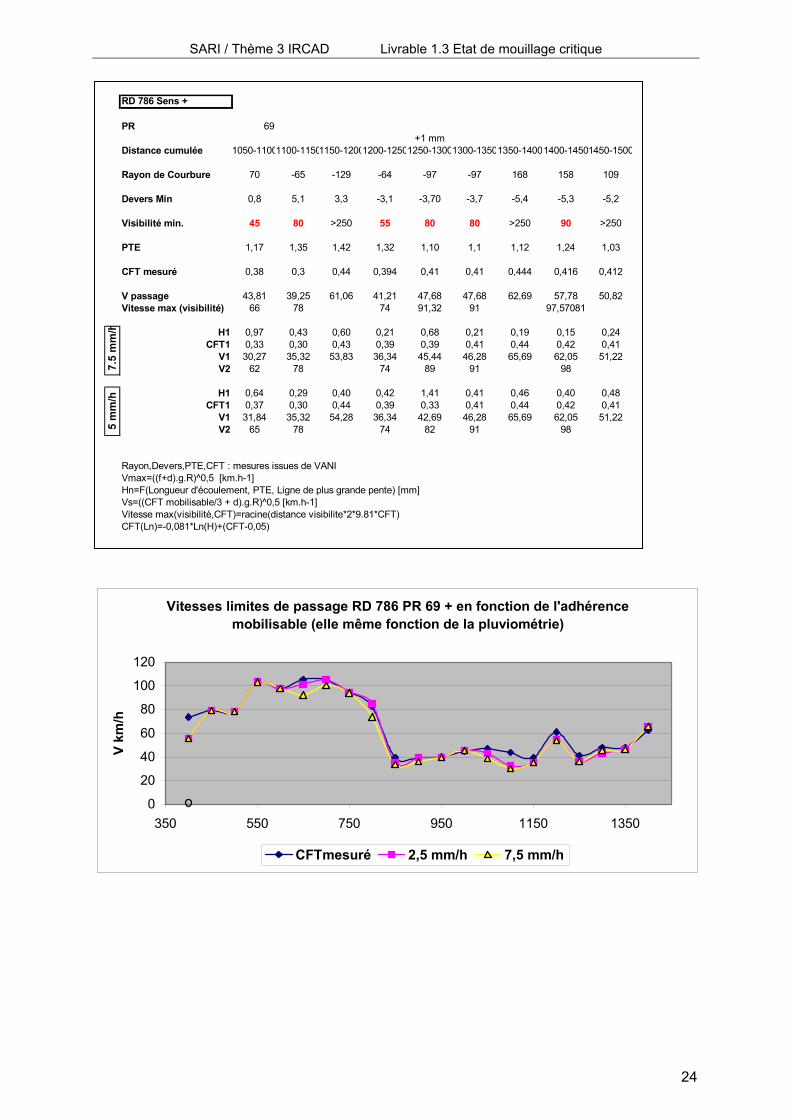
des vitesses limites. Deux graphiques permettent de visualiser la variation de la vitesse limite
de passage en fonction de l’adhérence mobilisable elle-même fonction de la pluviométrie.
Pour le PR 27 zone de Binic – St Quay Portrieux :
RD 786 Sens +
PR 27+12mm
Distance cumulée 1400-1450 1450-1500 1500-1550 1550-1600 1600-1650 1650-1700 1700-1750 1750-1800 1800-1850 1850-1900 1900-1950 1950-2000
Rayon de Courbure 403 260 218 247 201 212 239 245 245 600 600 352
Devers Min -4 -8,4 -10,2 -9,5 -9,1 -8,8 -8,9 -8 -8 -3,9 -3,9 -6,9
Visibilité min. 135 >250 >250 >250 >250 >250 >250 >250 >250 >250 155 145
PTE 1,2 1,1 1,1 1,1 0,9 0,9 0,9 0,9 0,9 1,0 1,0 0,7
CFT mesuré 0,36 0,38 0,39 0,41 0,39 0,44 0,43 0,43 0,43 0,44 0,40 0,39
V passage (km.h-1) 102,20 88,14 80,84 87,83 80,20 85,68 85,10 86,40 86,40 118,80 117,61 101,60Vitesse max(visibilité) 111 125 120
H1 0,35 0,30 0,22 0,25 0,23 0,24 0,21 12,20 0,20 0,41 0,43 0,24CFT1 0,36 0,38 0,39 0,41 0,39 0,44 0,43 0,18 0,43 0,44 0,40 0,39
V1 90,35 83,32 80,30 85,05 75,26 79,42 83,90 65,99 83,53 118,80 114,43 94,53V2 99
H1 0,12 0,10 0,07 0,08 0,08 0,08 0,07 12,07 0,07 0,14 0,14 0,08CFT1 0,36 0,38 0,39 0,41 0,39 0,44 0,43 0,18 0,43 0,44 0,40 0,39
V1 90,35 83,32 80,30 85,05 75,26 79,42 83,90 66,06 83,53 118,80 114,43 94,53V2 111
Rayon,Devers,PTE,CFT : mesures issues de VANIVmax=((f+d).g.R)^0,5 [km.h-1]Hn=F(Longueur d'écoulement, PTE, Ligne de plus grande pente) [mm]Vs=((CFT mobilisable/3 + d).g.R)^0,5 [km.h-1]Vitesse max(visibilité,CFT)=racine(distance visibilite*2*9.81*CFT)CFT(L ) 0 081*L (H) (CFT 0 05)
2.5
mm
/h7.
5 m
m/h
RD 786 Sens +
PR 27+1950 28
Distance cumulée 2000-2050 2050-2100 2100-2150 2150-2200 2200-2250 2250-2294 0-50 50-100 100-150
Rayon de Courbure 128 181 165 210 -166 -170 -165 -181 -249
Devers Min -9,2 -9,5 -8,1 1,2 1,6 10,7 10 10,5 8,7
Visibilité (m) >250 120 >250 >250 >250 44 95 >250 >250
PTE 0,73 0,9 0,97 0,95 0,73 0,89 0,87 0,81 0,95
CFT mesuré 0,35 0,37 0,36 0,39 0,38 0,34 0,39 0,42 0,43
V passage 58,37 73,20 68,29 75,05 66,77 72,07 70,56 75,80 87,71Vitesse max(visibilité) 107 61 97
H1 0,17 0,22 0,26 2,00 0,63 0,20 0,22 0,21 0,20CFT1 0,35 0,37 0,36 0,28 0,37 0,34 0,39 0,42 0,43
V1 58,37 71,10 65,04 84,55 54,35 68,90 69,56 74,88 85,27V2 107 61 97
H1 0,06 0,07 0,09 0,67 0,21 0,07 0,07 0,07 0,07CFT1 0,35 0,37 0,36 0,37 0,38 0,34 0,39 0,42 0,43
V1 58,37 71,10 65,04 97,59 55,13 68,90 69,56 74,88 85,27V2 107
Rayon,Devers,PTE,CFT : mesures issues de VANIVmax=((f+d).g.R)^0,5 [km.h-1]Hn=F(Longueur d'écoulement, PTE, Ligne de plus grande pente) [mm]Vs=((CFT mobilisable/3 + d).g.R)^0,5 [km.h-1]Vitesse max(visibilité,CFT)=racine(distance visibilite*2*9.81*CFT)CFT(Ln)=-0,081*Ln(H)+(CFT-0,05)
2.5
mm
/h7.
5 m
m/h
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
23
Pour le PR 69 section Lannion- St Michel en Grève
RD 786 Sens +
PR 69+1mm +3mm
Distance cumulée 400-450 450-500 500-550 550-600 600-650 650-700 700-750 750-800 800-850 800-850 850-900 900-950 950-1000 1000-1050
Rayon de Courbure 212 -254 -251 600 600 600 600 600 472 69 69 69 86 86
Devers Min 3,6 4,6 3,7 3,2 3,2 1,1 1,1 2,4 1 -4,7 -4,7 -5,7 -5,5 -6,1
Visibilité min. 70 235 >250 225 >250 >250 >250 >250 95 >250 >250 55 105
PTE 0,57 0,59 0,55 0,63 0,65 0,89 0,89 1,08 0,93 0,91 0,91 1,09 1,15 1,08
CFT mesuré 0,46 0,45 0,46 0,52 0,47 0,47 0,47 0,42 0,41 0,39 0,39 0,37 0,41 0,41
V passage 73,53 79,29 78,07 103,22 97,65 105,17 105,17 94,61 82,70 39,44 39,44 39,92 45,03 46,92Vitesse max (visibilité) 90 163 172 99 72 104
H1 0,20 0,19 0,22 0,23 0,34 1,86 0,86 0,56 1,95 2,87 1,37 0,38 0,41 4,83CFT1 0,46 0,45 0,46 0,52 0,47 0,37 0,43 0,42 0,30 0,25 0,31 0,37 0,41 0,23
V1 55,92 79,29 78,07 103,22 97,65 92,29 100,52 94,23 74,02 33,84 36,34 39,77 45,70 38,82V2 90 163 172 86 72 104
H1 0,07 0,06 0,07 0,08 0,11 0,79 0,29 0,19 0,65 1,96 0,46 0,13 0,14 1,61CFT1 0,46 0,45 0,46 0,52 0,47 0,44 0,47 0,42 0,39 0,28 0,39 0,37 0,41 0,32
V1 55,92 79,29 78,07 103,22 97,65 101,41 105,17 94,61 85,20 35,15 39,26 39,77 45,70 42,79V2 90 163 172 97 72 104
Rayon,Devers,PTE,CFT : mesures issues de VANIVmax=((f+d).g.R)^0,5 [km.h-1]Hn=F(Longueur d'écoulement, PTE, Ligne de plus grande pente) [mm]Vs=((CFT mobilisable/3 + d).g.R)^0,5 [km.h-1]Vitesse max(visibilité,CFT)=racine(distance visibilite*2*9.81*CFT)CFT(Ln)=-0,081*Ln(H)+(CFT-0,05)
7.5
mm
/h2.
5 m
m/h
Vitesses limites de passage RD 786 PR 27 + en fonction de l'adhérence
mobilisable (elle même fonction de la pluviométrie)
405060708090
100110120130
1350 1550 1750 1950 2150 2350
Km
/h
CFTmesuré 2,5 mm/h 7,5 mm/h
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
24
RD 786 Sens +
PR 69+1 mm
Distance cumulée 1050-11001100-11501150-12001200-12501250-13001300-13501350-14001400-14501450-1500
Rayon de Courbure 70 -65 -129 -64 -97 -97 168 158 109
Devers Min 0,8 5,1 3,3 -3,1 -3,70 -3,7 -5,4 -5,3 -5,2
Visibilité min. 45 80 >250 55 80 80 >250 90 >250
PTE 1,17 1,35 1,42 1,32 1,10 1,1 1,12 1,24 1,03
CFT mesuré 0,38 0,3 0,44 0,394 0,41 0,41 0,444 0,416 0,412
V passage 43,81 39,25 61,06 41,21 47,68 47,68 62,69 57,78 50,82Vitesse max (visibilité) 66 78 74 91,32 91 97,57081
H1 0,97 0,43 0,60 0,21 0,68 0,21 0,19 0,15 0,24CFT1 0,33 0,30 0,43 0,39 0,39 0,41 0,44 0,42 0,41
V1 30,27 35,32 53,83 36,34 45,44 46,28 65,69 62,05 51,22V2 62 78 74 89 91 98
H1 0,64 0,29 0,40 0,42 1,41 0,41 0,46 0,40 0,48CFT1 0,37 0,30 0,44 0,39 0,33 0,41 0,44 0,42 0,41
V1 31,84 35,32 54,28 36,34 42,69 46,28 65,69 62,05 51,22V2 65 78 74 82 91 98
Rayon,Devers,PTE,CFT : mesures issues de VANIVmax=((f+d).g.R)^0,5 [km.h-1]Hn=F(Longueur d'écoulement, PTE, Ligne de plus grande pente) [mm]Vs=((CFT mobilisable/3 + d).g.R)^0,5 [km.h-1]Vitesse max(visibilité,CFT)=racine(distance visibilite*2*9.81*CFT)CFT(Ln)=-0,081*Ln(H)+(CFT-0,05)
7.5
mm
/h5
mm
/h
Vitesses limites de passage RD 786 PR 69 + en fonction de l'adhérence mobilisable (elle même fonction de la pluviométrie)
0
20
40
60
80
100
120
350 550 750 950 1150 1350
V km
/h
CFTmesuré 2,5 mm/h 7,5 mm/h
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
25
7. Conclusions
La démarche proposée dans cette étude permet d’évaluer les vitesses limites de passage
en conditions atmosphériques dégradées (pluie principalement), en fonction des principaux
paramètres de la chaussée suivants :
- Caractéristiques géométriques
o Rayon de courbure
o Dévers
o Pente longitudinale
o Orniérage
- Adhérence
- Macrotexture
Ces différentes caractéristiques associées à la pluviométrie permettent de déterminer des
hauteurs d’eau à la surface de la chaussée. Ces hauteurs d’eau permettent de calculer une
adhérence mobilisable et une vitesse limite de stabilité. Une vitesse limite liée à la distance
de visibilité est également déterminée.
Ces vitesses limites peuvent être utilisées pour ajuster la signalisation sur un itinéraire ou
pour informer ponctuellement les usagers sur un point singulier difficile.
C’est cette dernière utilisation qui doit être mise en œuvre dans le cadre du projet IRCAD de
SARI sur la RD 786 du département des Côtes d’Armor.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
26
Bibliographie : Voir Bibliographie réalisée à la fin du chapitre 2 de ce rapport
[1] Bulletin de Liaison des Laboratoires Routiers Ponts et Chaussées : Spécial F GLISSANCE novembre 1966; Article G. JEUFFROY pages 29-45
[2] Do MT et al., (2005), IRCAD – Etude bibliographique – SARI, novembre, 105p
[3] Kerdudo K. et al. (2005), RADARR – Choix de sites expérimentaux, SARI, septembre, 38p + annexes
[4] Anelli P. et al. (2006), IRCAD - Choix des itinéraires et chiffrage des expérimentations Livrable 3.31

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
27
Le présent document a été rédigé par Michel Gothié LRPC LYON
Le chef de l'ERA n°12
Groupe "CHAUSSÉES et SÉCURITÉ"
Michel GOTHIE
Le chef du Groupe
"CHAUSSÉES et SÉCURITÉ"
Alain PETIOT

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
28
Photo 1 – PALLAS 2 du LRPC d’Autun
Photo 2 – Appareil SCRIM du LRPC de Lyon

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
29
Photo 3 - Appareil VANI du LRPC de Lyon tractant le GRIPTESTER
Photo 4 – Appareil RUGO2
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
30
Annexes
1-Caractéristiques des sites 2-Alertes utilisées dans ALERTINFRA 3-Résultats des mesures VANI sur les 2 sections 4-Résultats des mesures SCRIM + RUGO 5-Résultats des mesures de PALAS 2 6-Affichage des lignes d’écoulement
.
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
31
ANNEXE 1 : Caractéristiques des sites Site n°1 – RD 786 – LANNION – SAINT MICHEL EN GREVE
Virage n°I.1a Sens Lannion – St Michel en Grève Repère 0.816 m
Virage n°I.1b Sens St Michel en Grève – Lannion Repère 1.001 m
Caractéristiques du virage :
R min : 64 m adhérence min : 0,51 macrotexture HS min : 0,9 mm dévers max : 6 % pente : 5 %
Observations ALERTINFRA : V1 – V2 – V3 – V7 Indice = 4,75
Caractéristiques du virage : R min : 70 m adhérence min : 0,53 macrotexture HS min : 0,8 mm dévers max : 7 % pente : 5 %
Observations ALERTINFRA : I1 - V3 Indice = 1,52
Virage n°I.2a Sens Lannion – St Michel en Grève Repère 1.474 m
Virage n°I.2b Sens St Michel en Grève – Lannion Repère 1.525 m
Caractéristiques du virage :
R min : 45 m adhérence min : 0,45 macrotexture HS min : 1,1 mm dévers max : 12 % pente : 4 %
Observations ALERTINFRA : V1 – V3 – V5 – V7 – V10 Indice = 7,47
Caractéristiques du virage : R min : 47 m adhérence min : 0,56 macrotexture HS min : 1,0 mm dévers max : 8 % pente : 5 %
Observations ALERTINFRA : V3 Indice = 1,52
Virage n°I.3a Sens Lannion – St Michel en Grève Repère 1.674 m
Virage n°I.3b Sens St Michel en Grève – Lannion Repère 1.853 m
Caractéristiques du virage :
R min : 79 m adhérence min : 0,53 macrotexture HS min : 1,1 mm dévers max : 4 % pente : 5 %
Observations ALERTINFRA : I1 - V3 – V5 – V11 Indice = 4,75
Caractéristiques du virage : R min : 81 m adhérence min : 0,51 macrotexture HS min : 0,8 mm dévers max : 4 % pente : 5 %
Observations ALERTINFRA : I1 - V3 – V11 Indice = 3,18
Virage n°I.4a Sens Lannion – St Michel en Grève
Virage n°I.4b Sens St Michel en Grève – Lannion
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
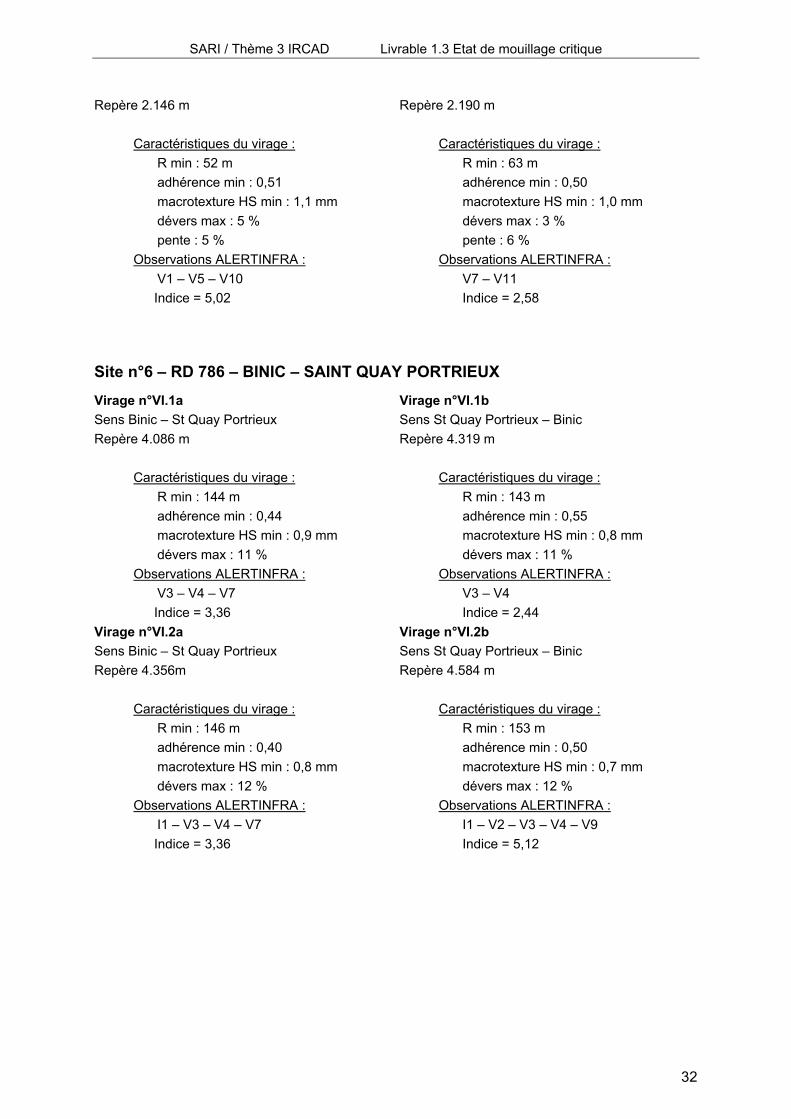
32
Repère 2.146 m Repère 2.190 m
Caractéristiques du virage : R min : 52 m adhérence min : 0,51 macrotexture HS min : 1,1 mm dévers max : 5 % pente : 5 %
Observations ALERTINFRA : V1 – V5 – V10 Indice = 5,02
Caractéristiques du virage : R min : 63 m adhérence min : 0,50 macrotexture HS min : 1,0 mm dévers max : 3 % pente : 6 %
Observations ALERTINFRA : V7 – V11 Indice = 2,58
Site n°6 – RD 786 – BINIC – SAINT QUAY PORTRIEUX
Virage n°VI.1a Sens Binic – St Quay Portrieux Repère 4.086 m
Virage n°VI.1b Sens St Quay Portrieux – Binic Repère 4.319 m
Caractéristiques du virage :
R min : 144 m adhérence min : 0,44 macrotexture HS min : 0,9 mm dévers max : 11 %
Observations ALERTINFRA : V3 – V4 – V7 Indice = 3,36
Caractéristiques du virage : R min : 143 m adhérence min : 0,55 macrotexture HS min : 0,8 mm dévers max : 11 %
Observations ALERTINFRA : V3 – V4 Indice = 2,44
Virage n°VI.2a Sens Binic – St Quay Portrieux Repère 4.356m
Virage n°VI.2b Sens St Quay Portrieux – Binic Repère 4.584 m
Caractéristiques du virage :
R min : 146 m adhérence min : 0,40 macrotexture HS min : 0,8 mm dévers max : 12 %
Observations ALERTINFRA : I1 – V3 – V4 – V7 Indice = 3,36
Caractéristiques du virage : R min : 153 m adhérence min : 0,50 macrotexture HS min : 0,7 mm dévers max : 12 %
Observations ALERTINFRA : I1 – V2 – V3 – V4 – V9 Indice = 5,12
SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
33
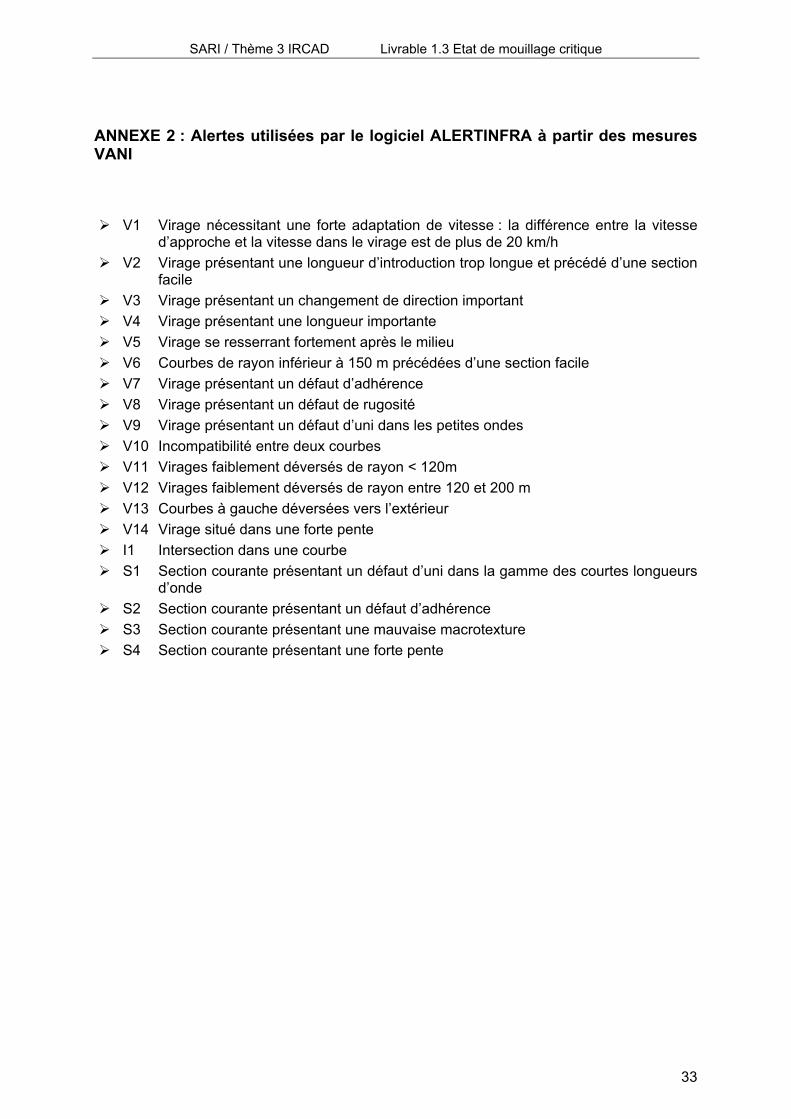
ANNEXE 2 : Alertes utilisées par le logiciel ALERTINFRA à partir des mesures VANI
V1 Virage nécessitant une forte adaptation de vitesse : la différence entre la vitesse
d’approche et la vitesse dans le virage est de plus de 20 km/h V2 Virage présentant une longueur d’introduction trop longue et précédé d’une section
facile V3 Virage présentant un changement de direction important V4 Virage présentant une longueur importante V5 Virage se resserrant fortement après le milieu V6 Courbes de rayon inférieur à 150 m précédées d’une section facile V7 Virage présentant un défaut d’adhérence V8 Virage présentant un défaut de rugosité V9 Virage présentant un défaut d’uni dans les petites ondes V10 Incompatibilité entre deux courbes V11 Virages faiblement déversés de rayon < 120m V12 Virages faiblement déversés de rayon entre 120 et 200 m V13 Courbes à gauche déversées vers l’extérieur V14 Virage situé dans une forte pente I1 Intersection dans une courbe S1 Section courante présentant un défaut d’uni dans la gamme des courtes longueurs
d’onde S2 Section courante présentant un défaut d’adhérence S3 Section courante présentant une mauvaise macrotexture S4 Section courante présentant une forte pente

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
34
ANNEXE 3 : Résultats des mesures VANI sur les 2 sections

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
35
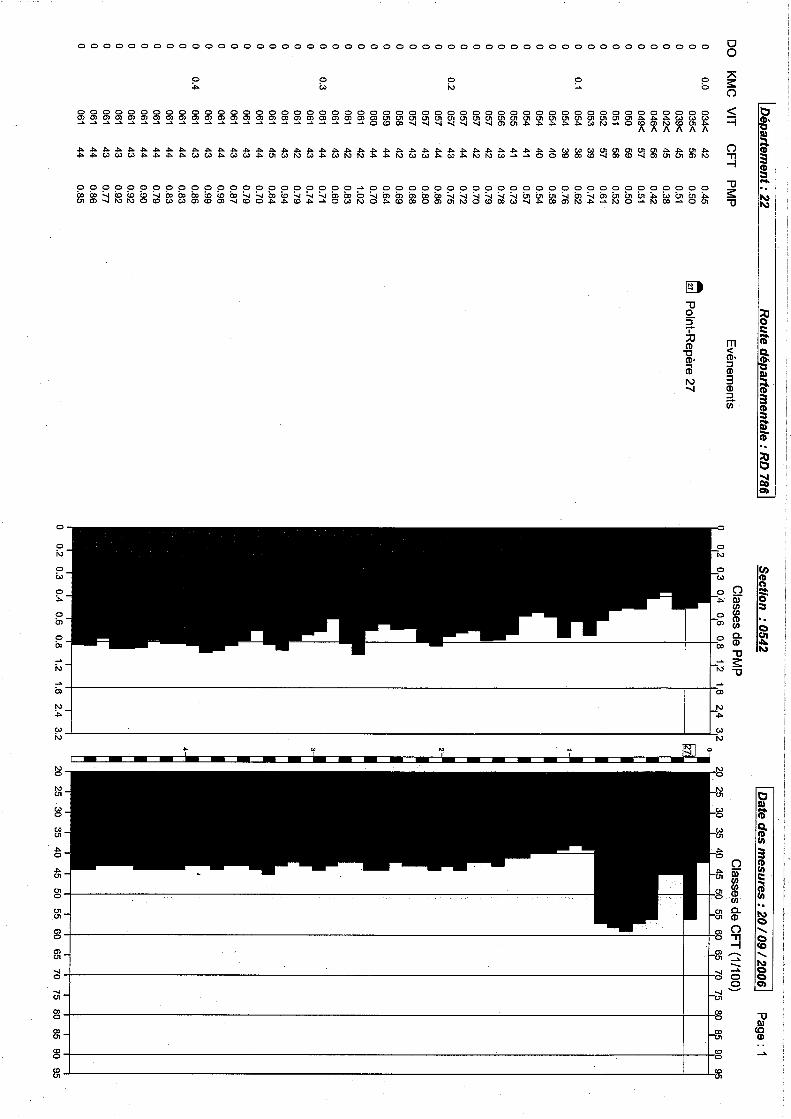
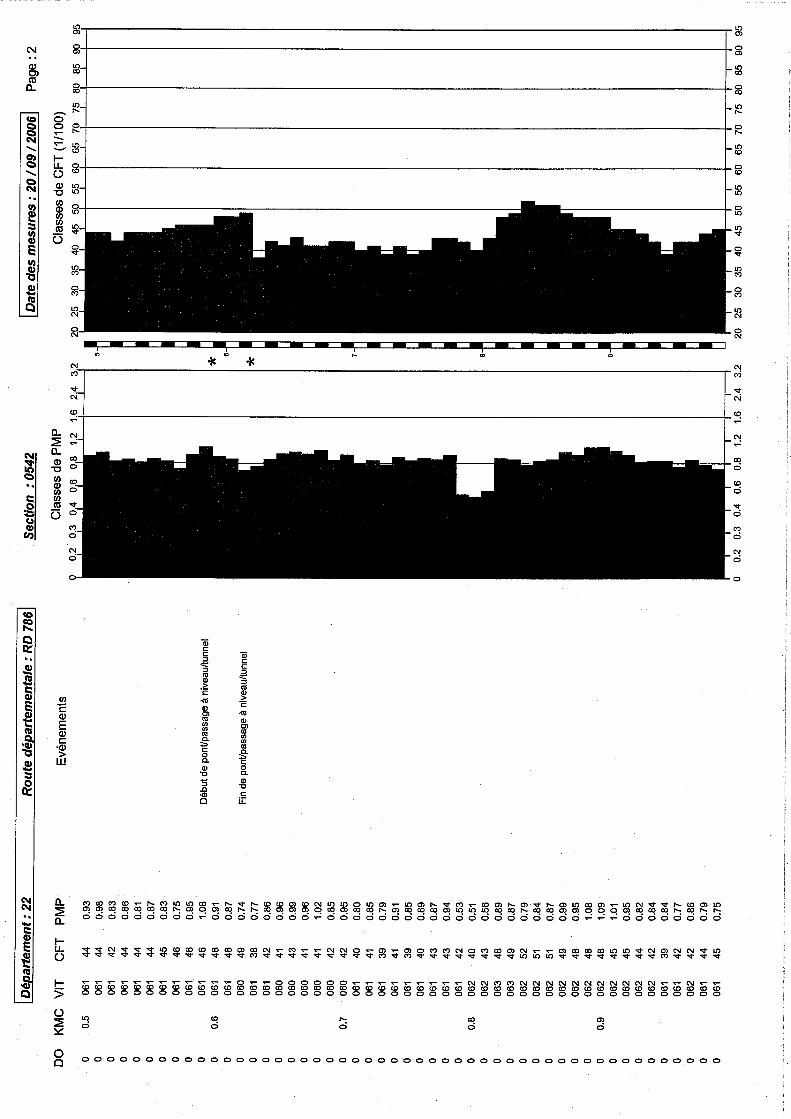
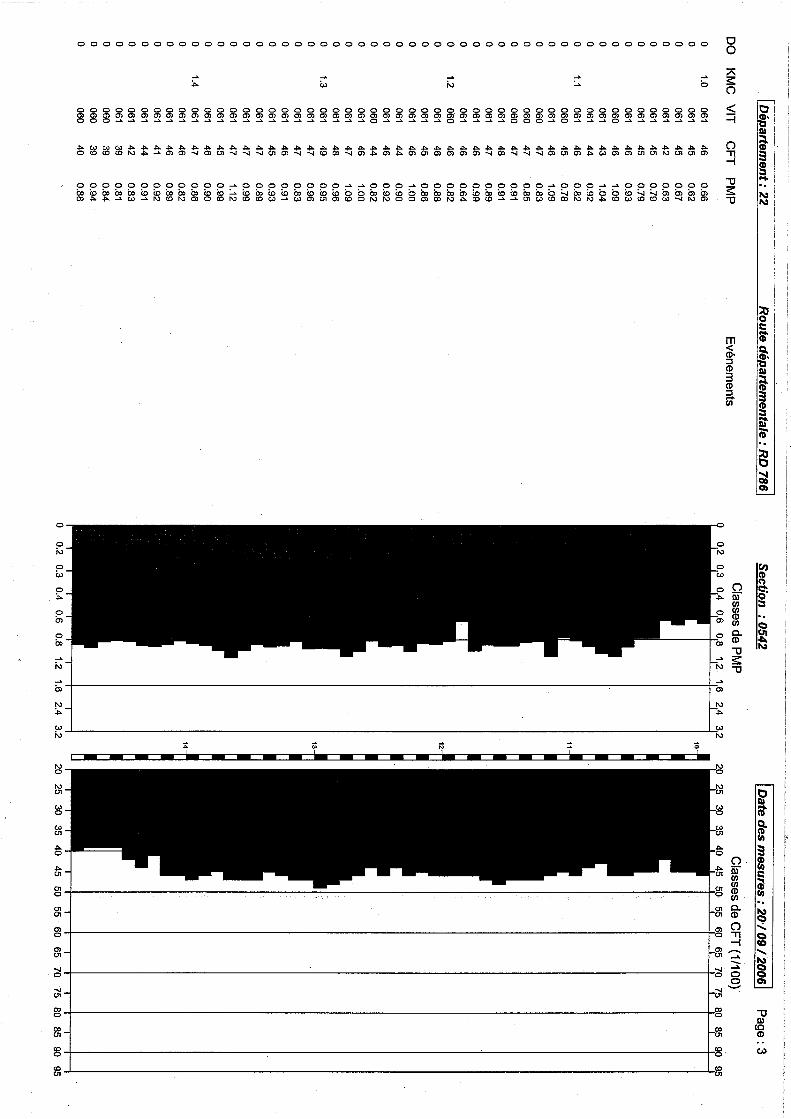
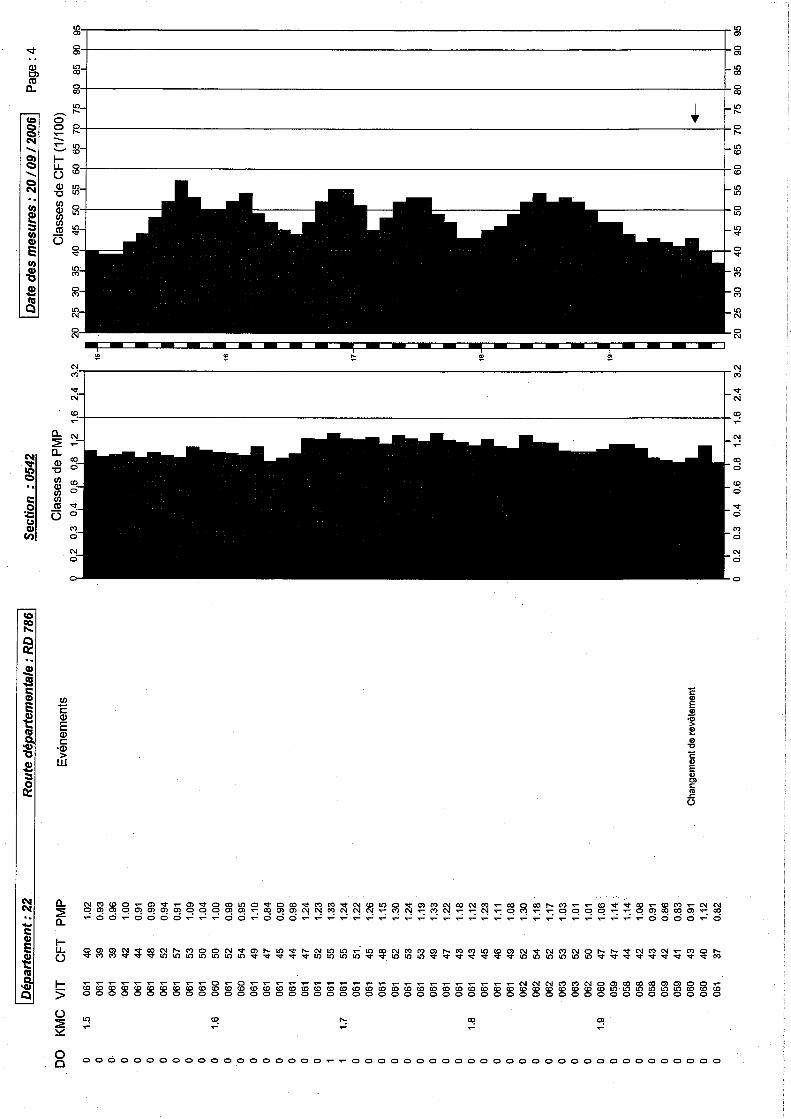
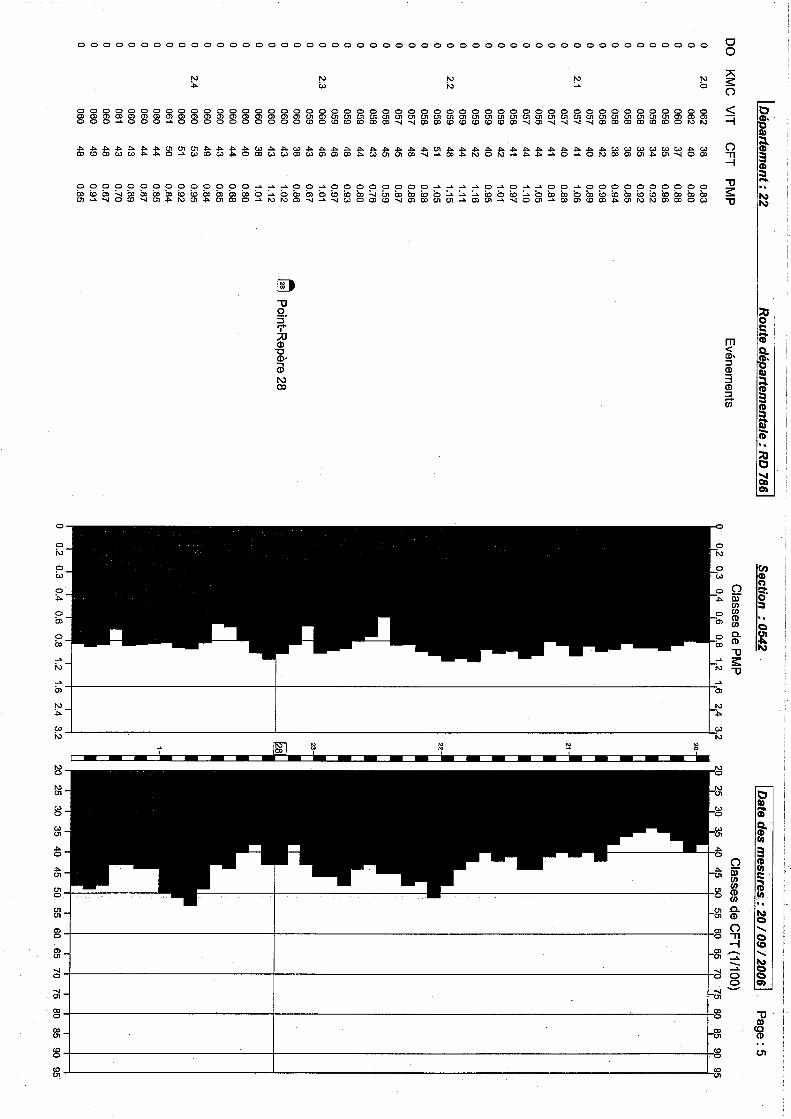
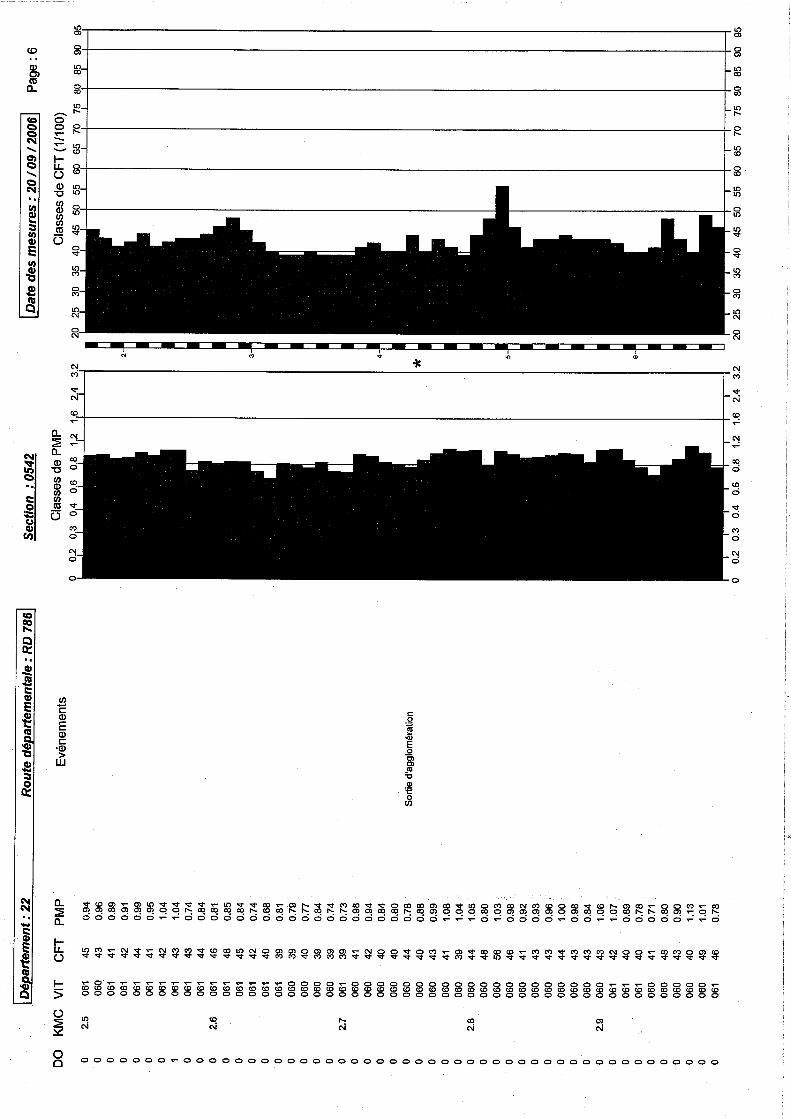
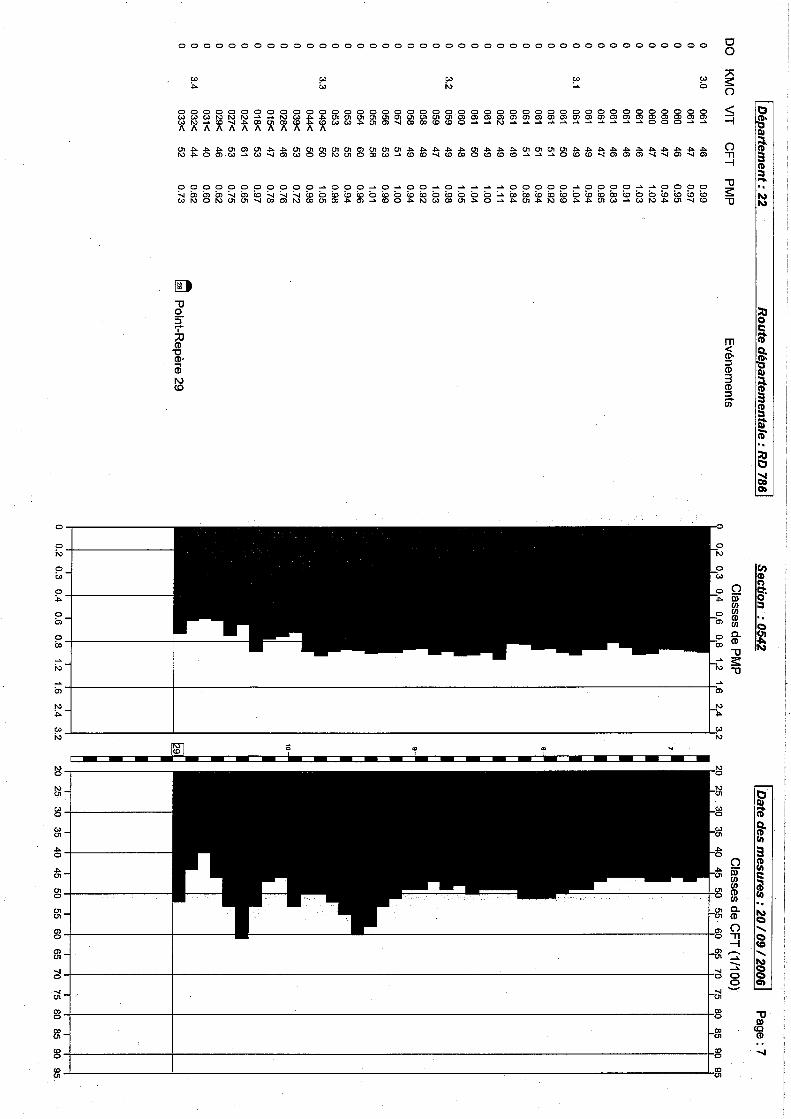
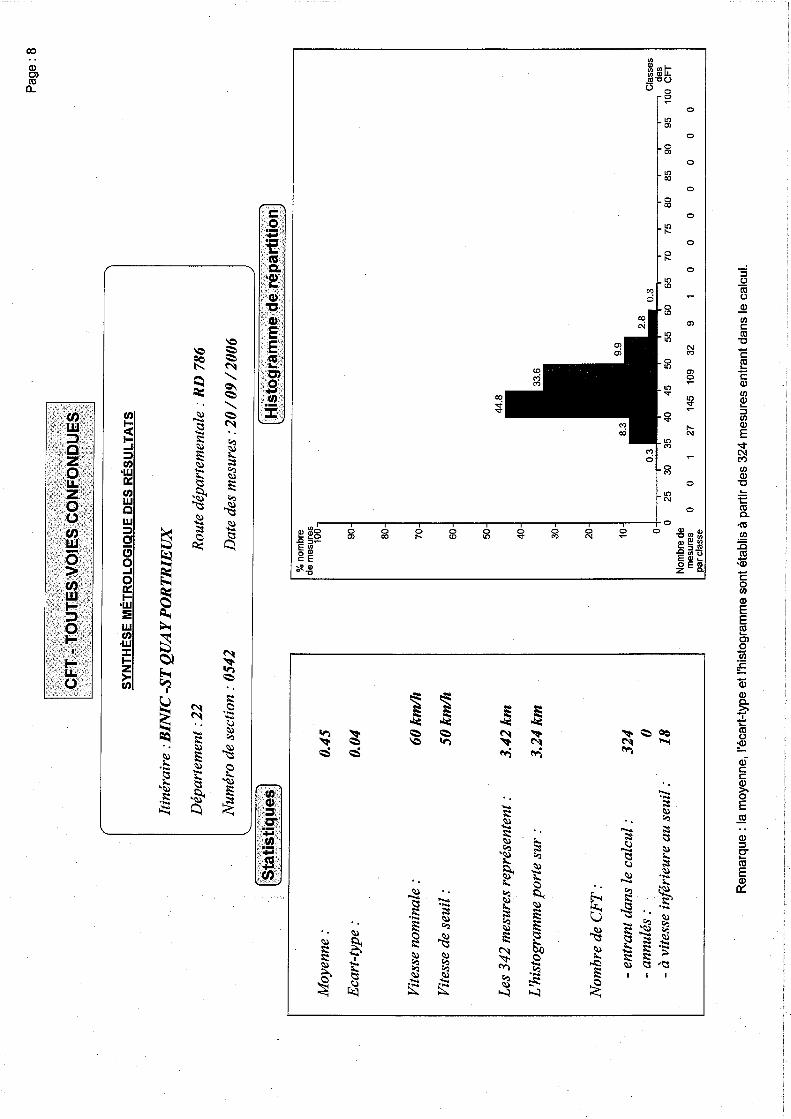
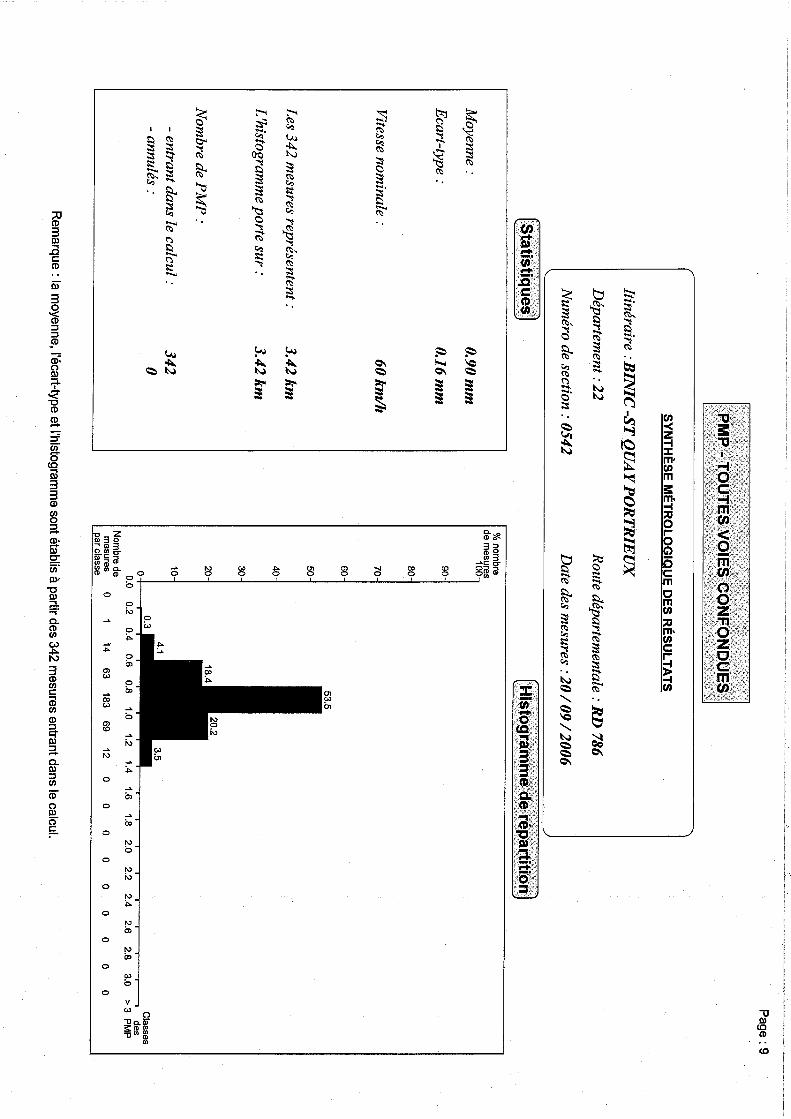
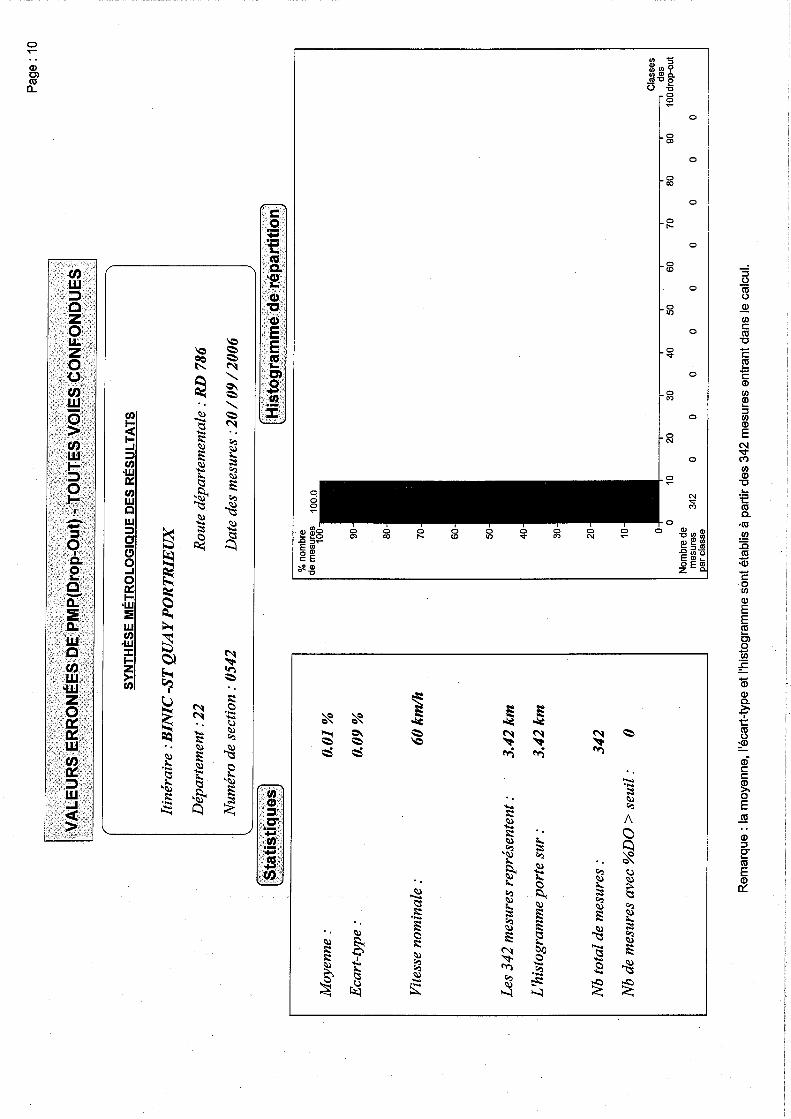
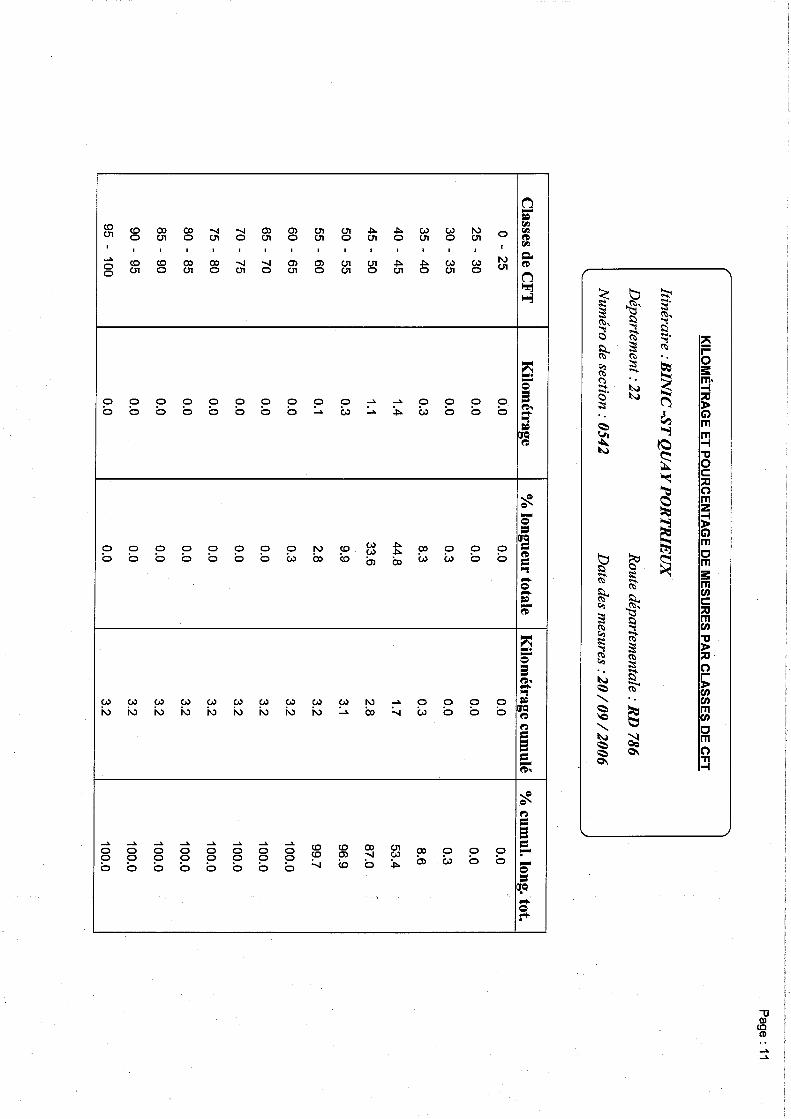
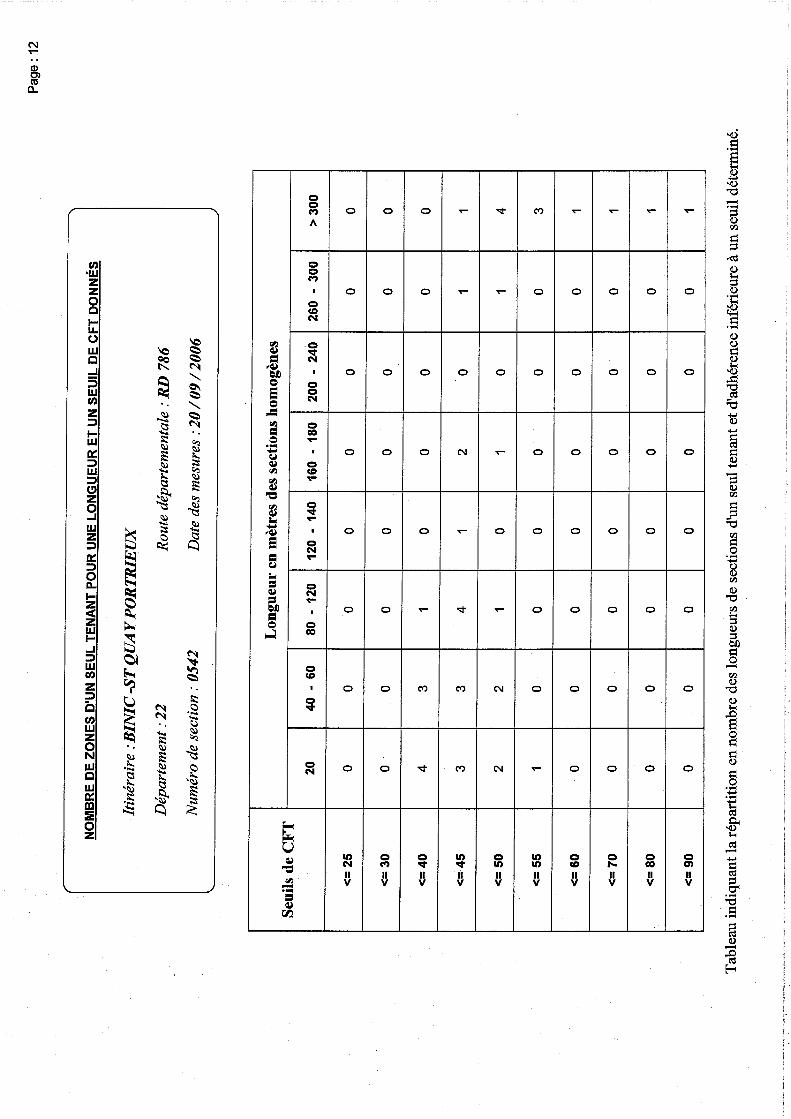
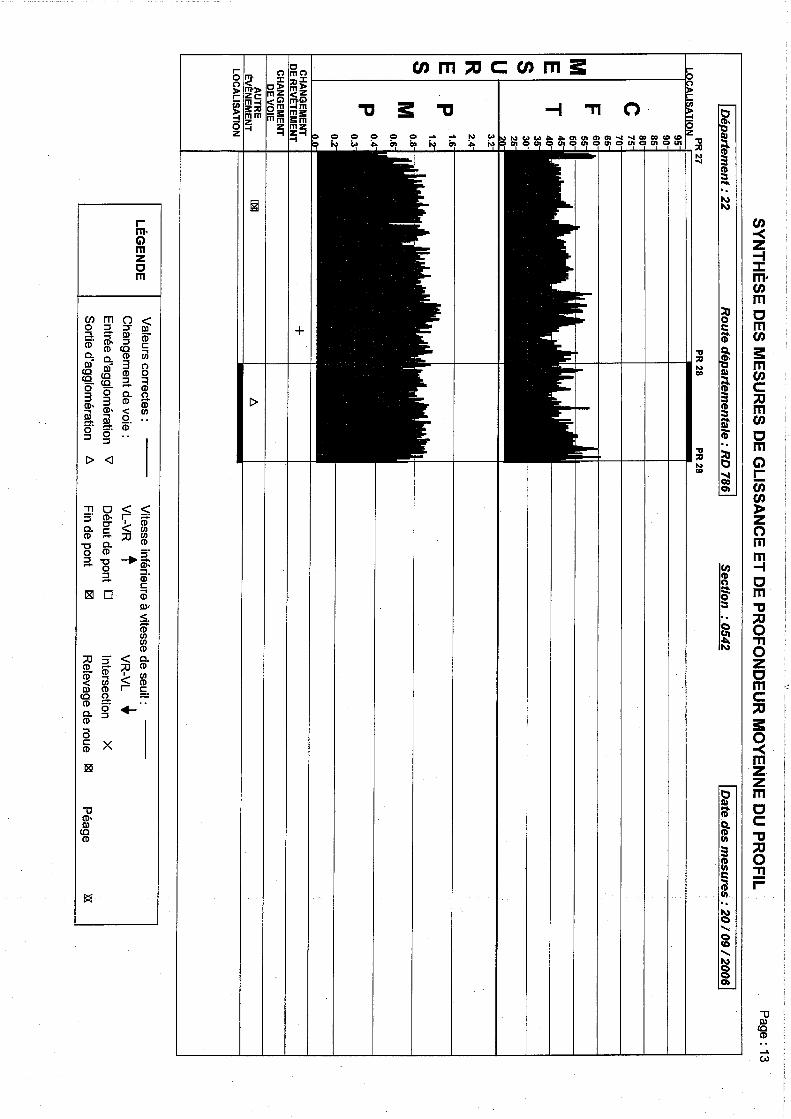
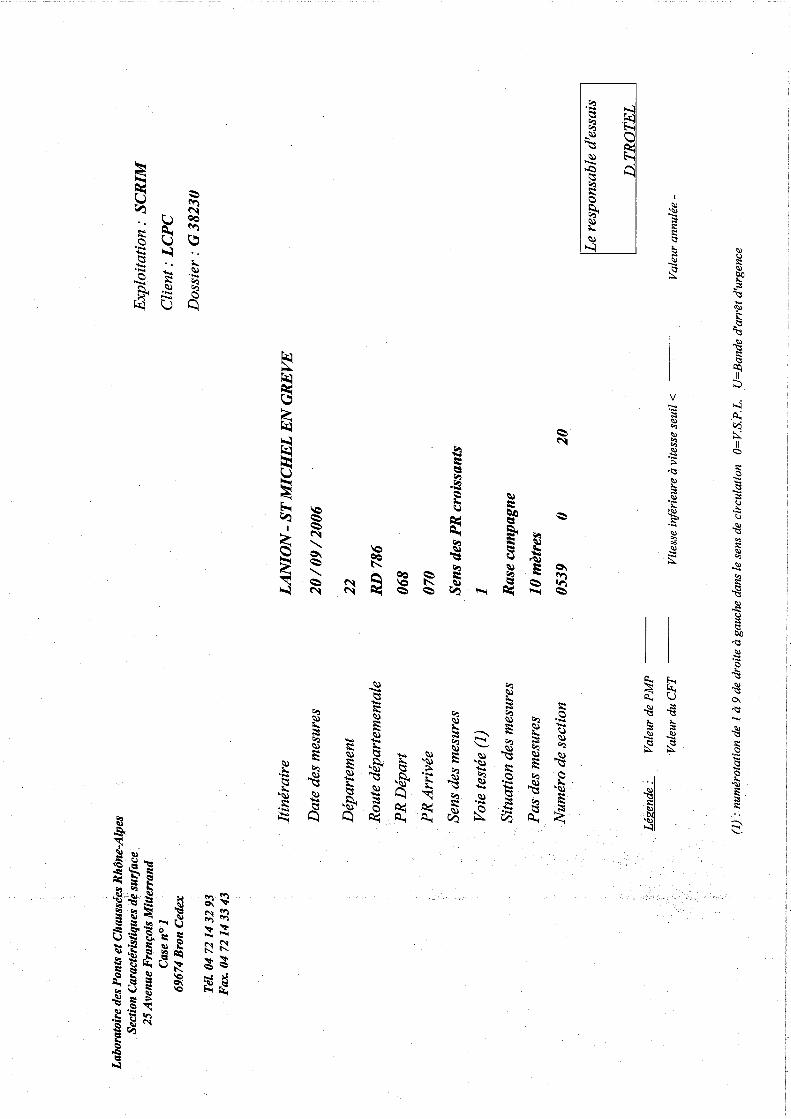
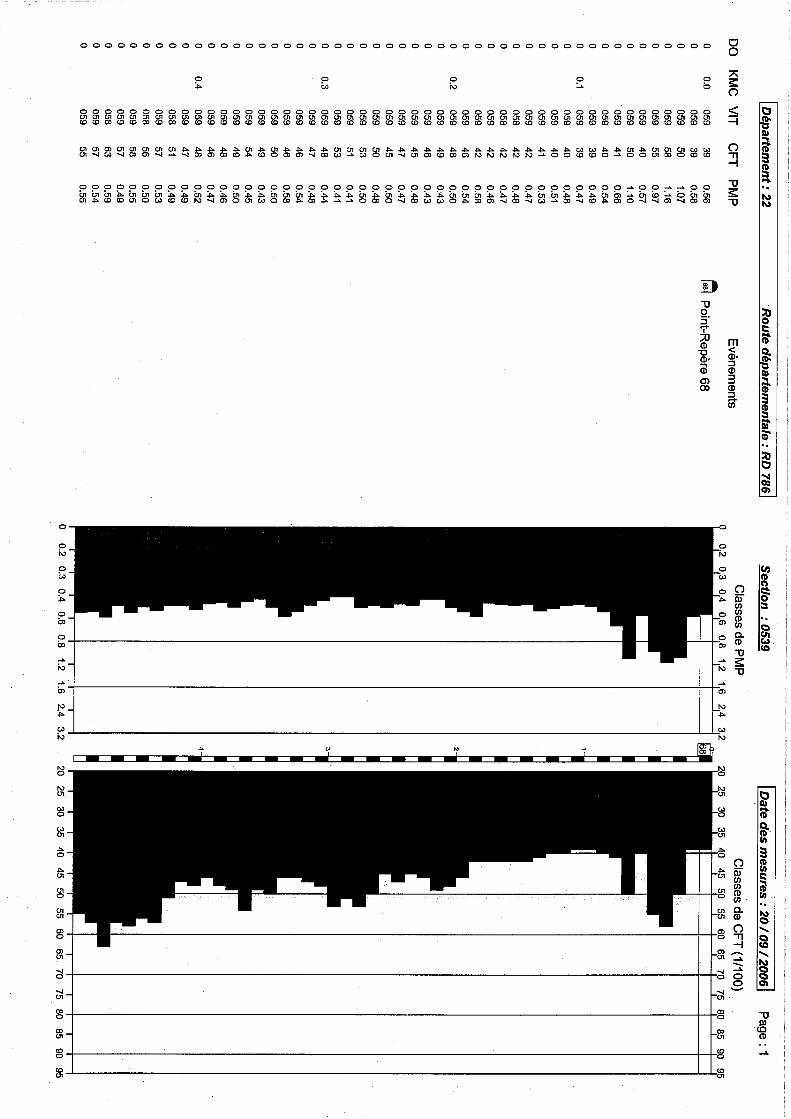
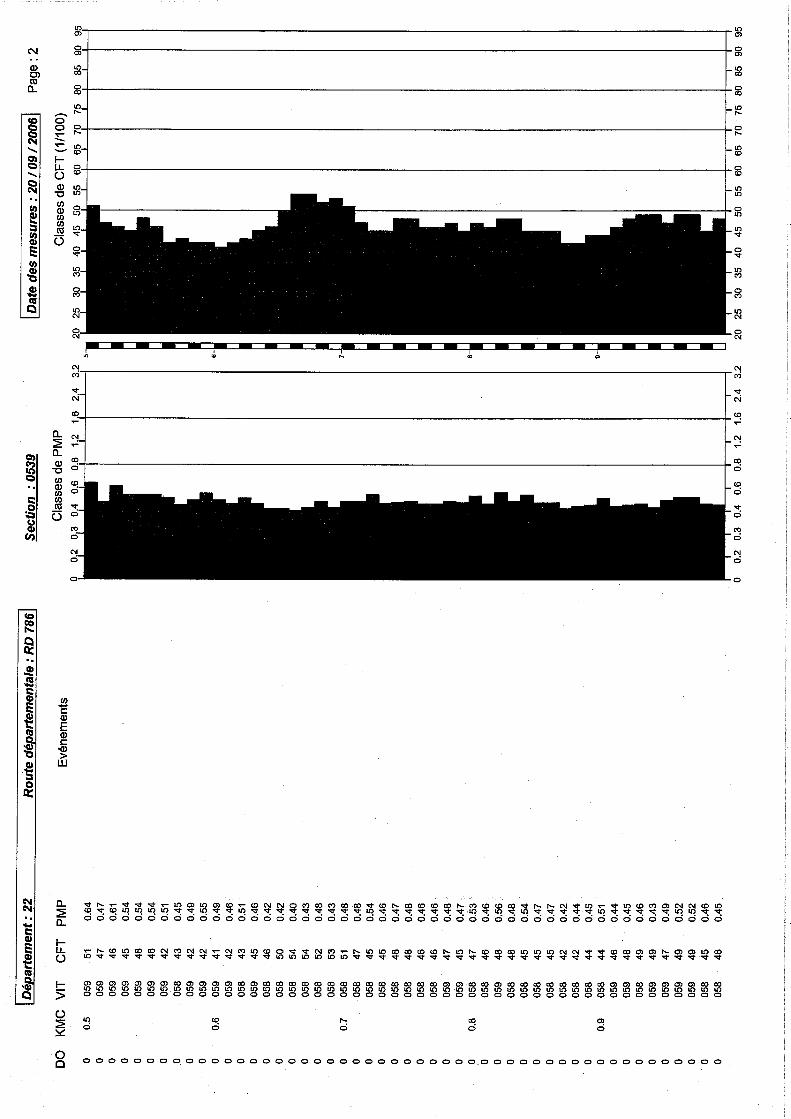
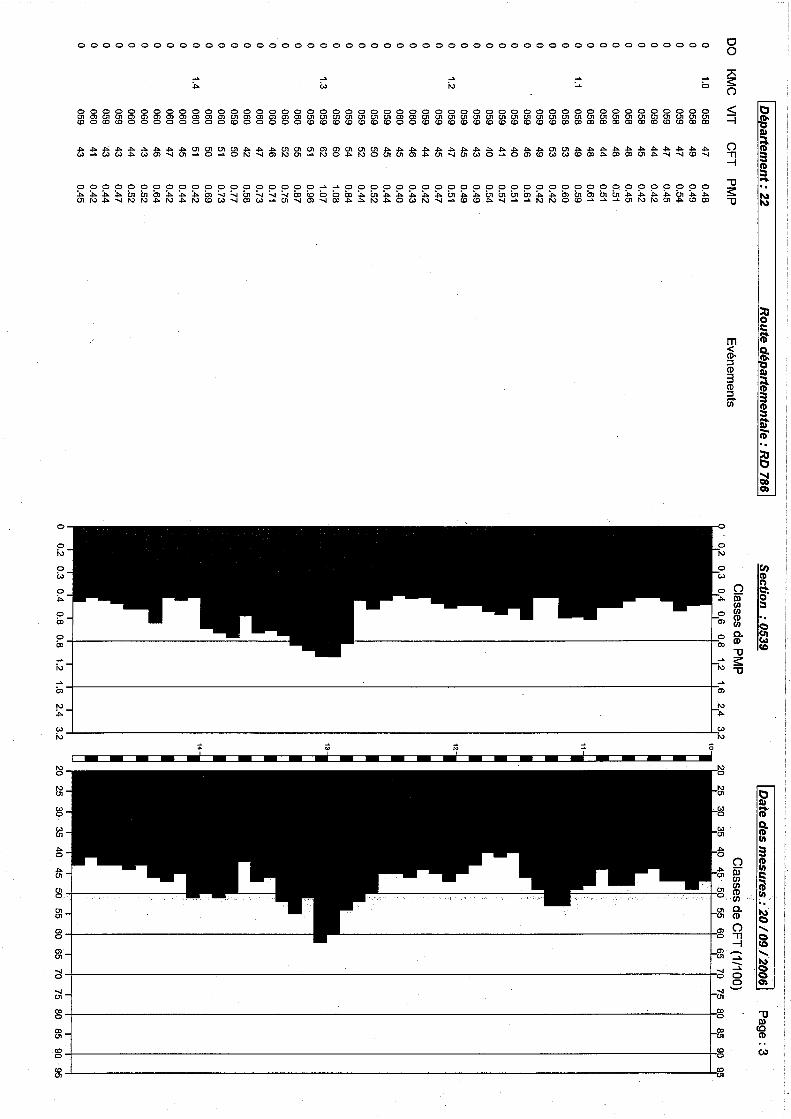
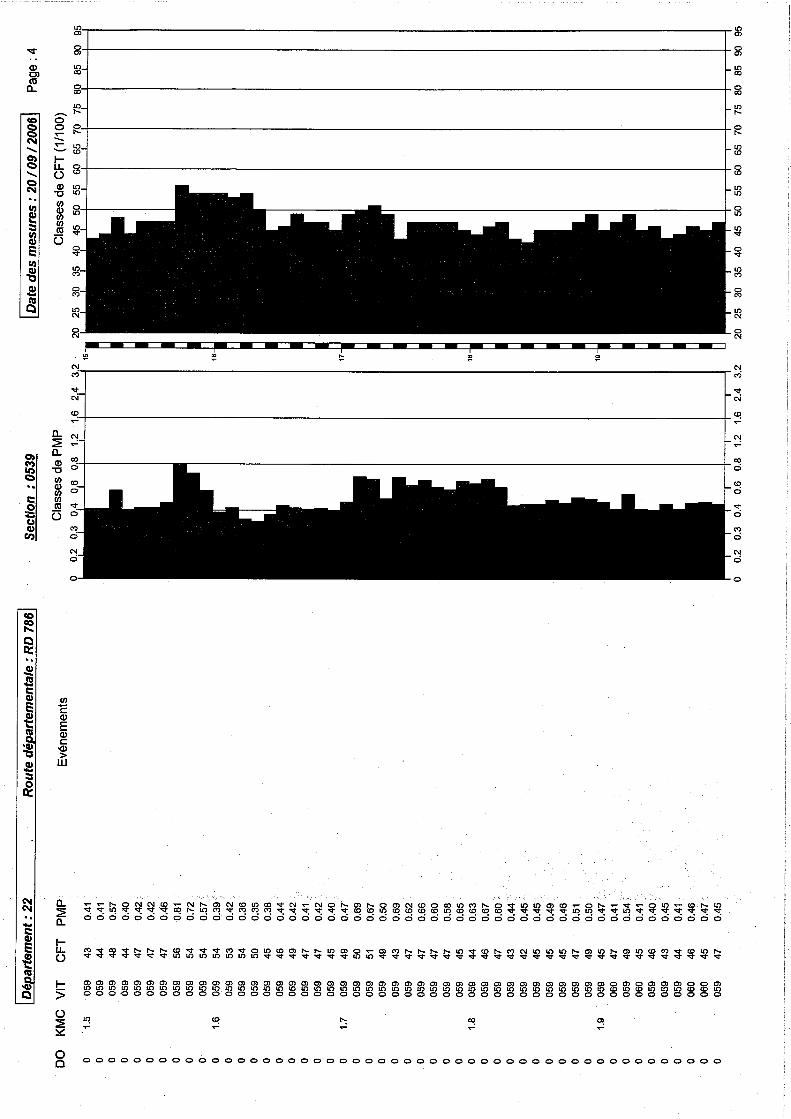
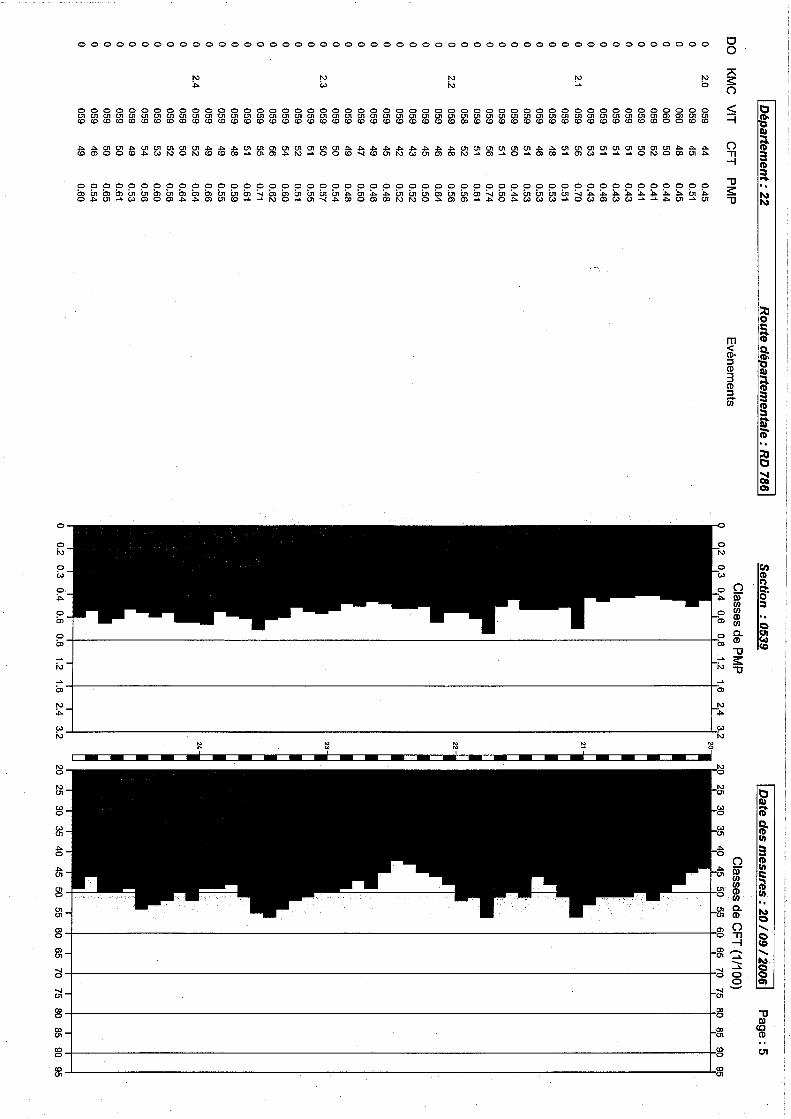
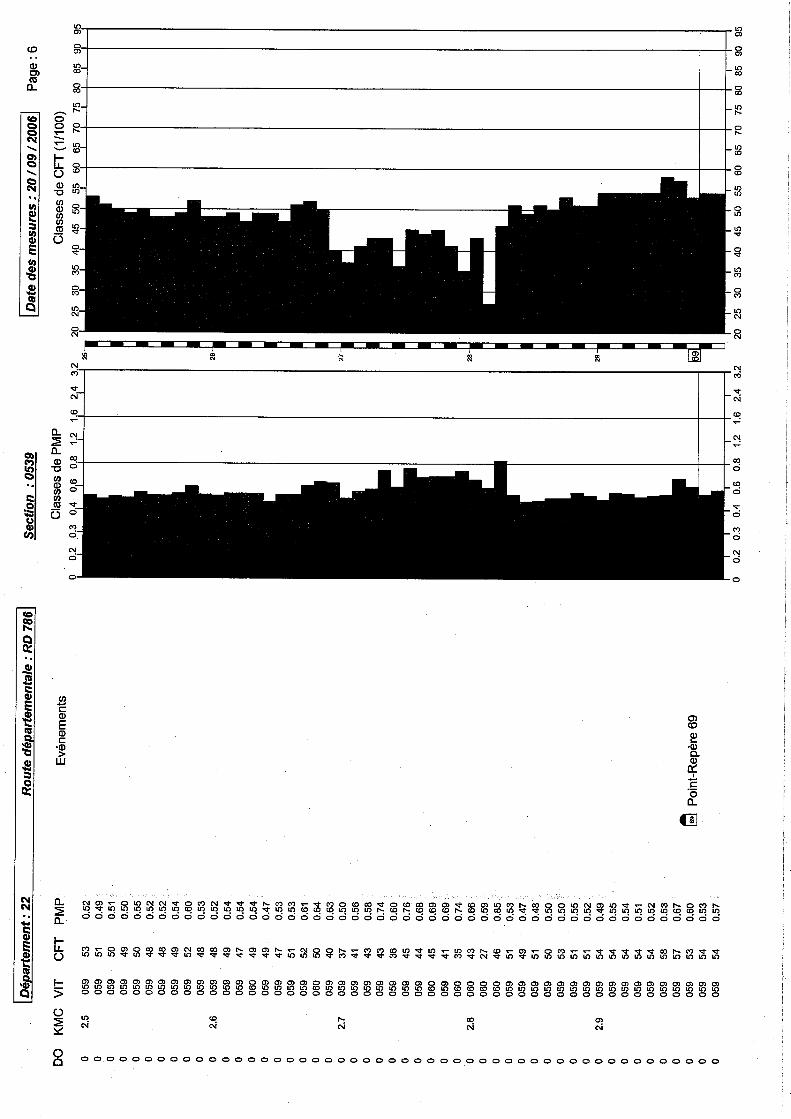
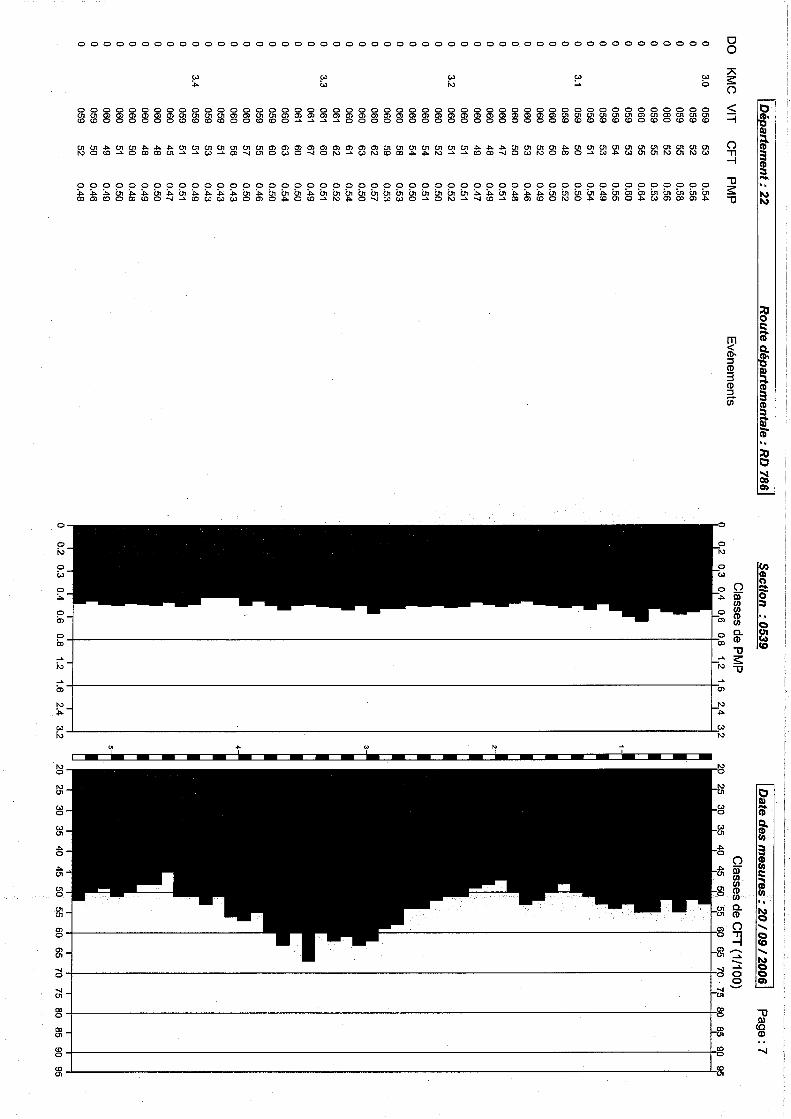
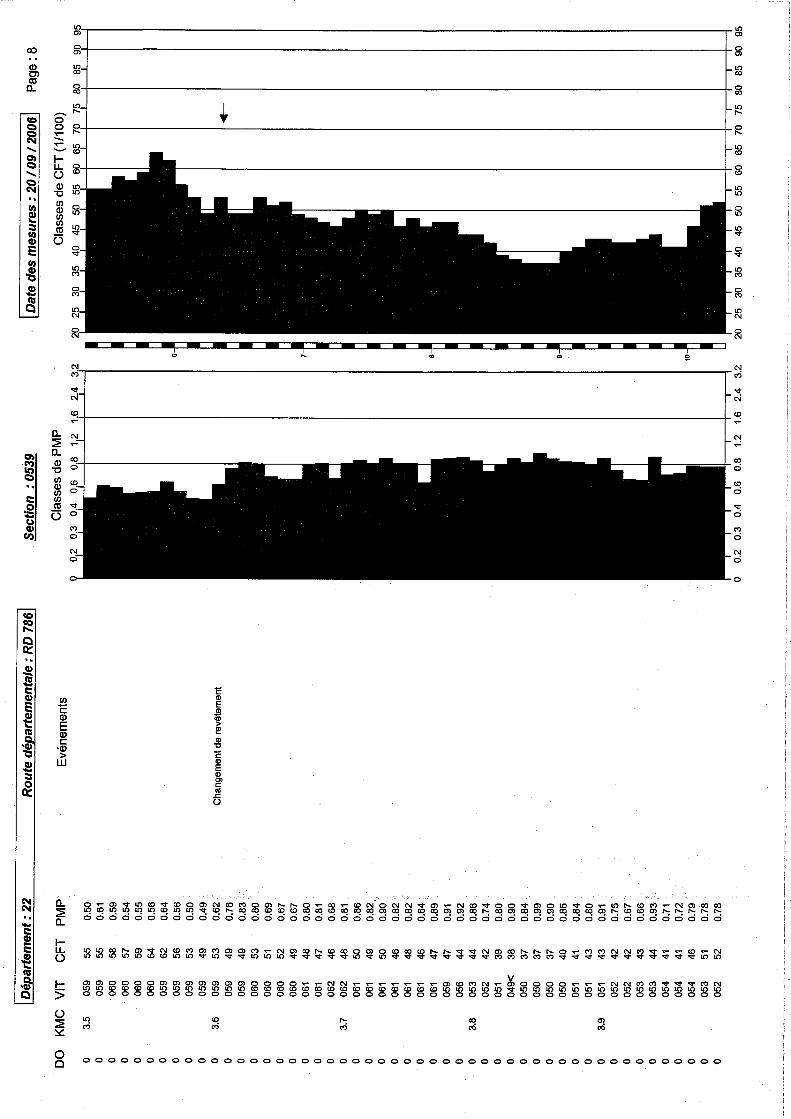
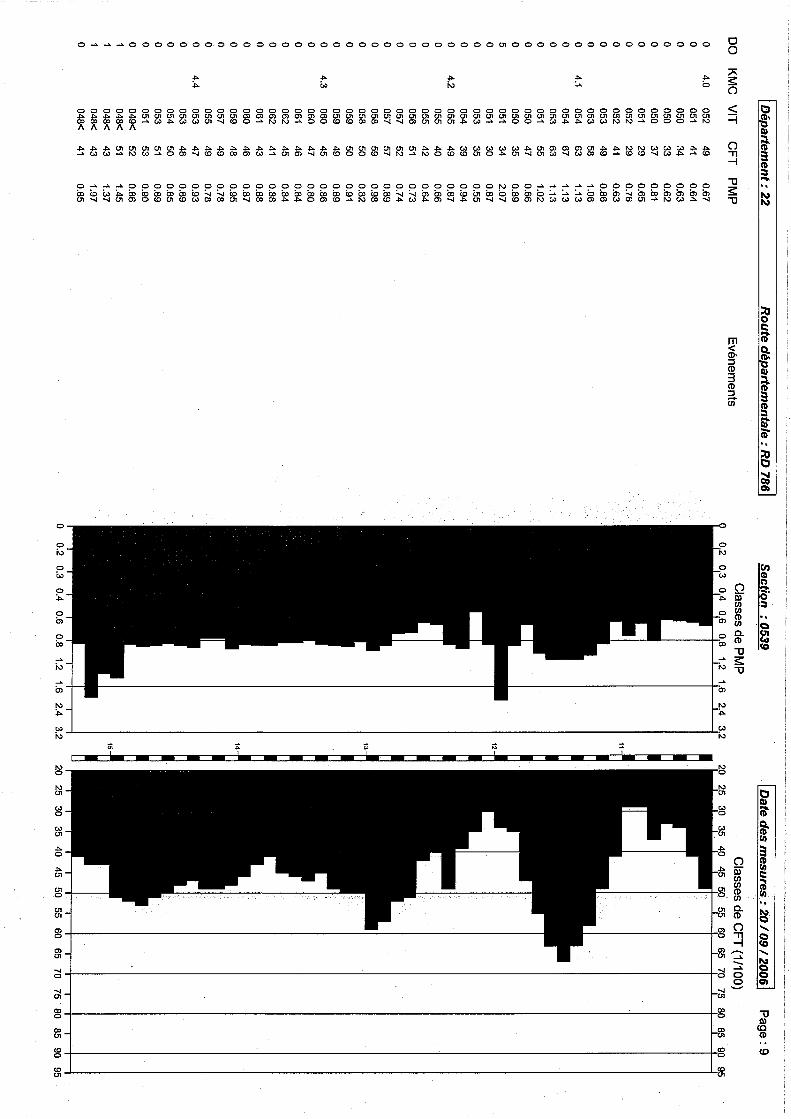
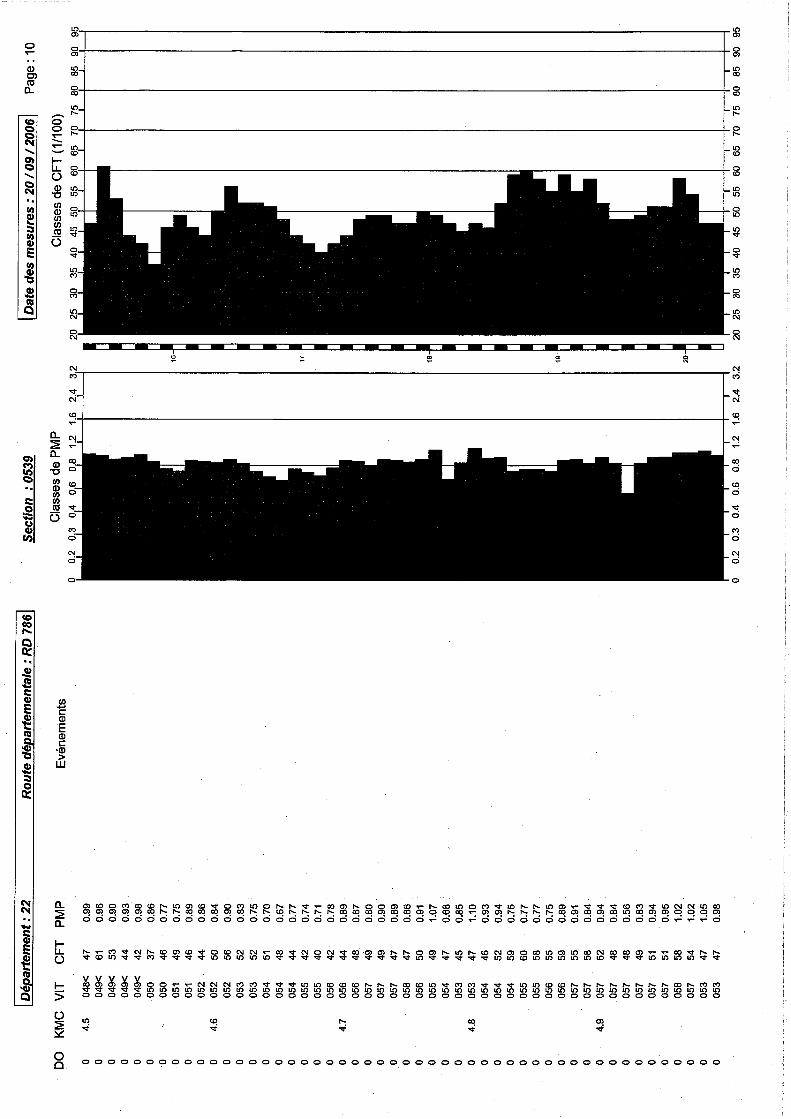
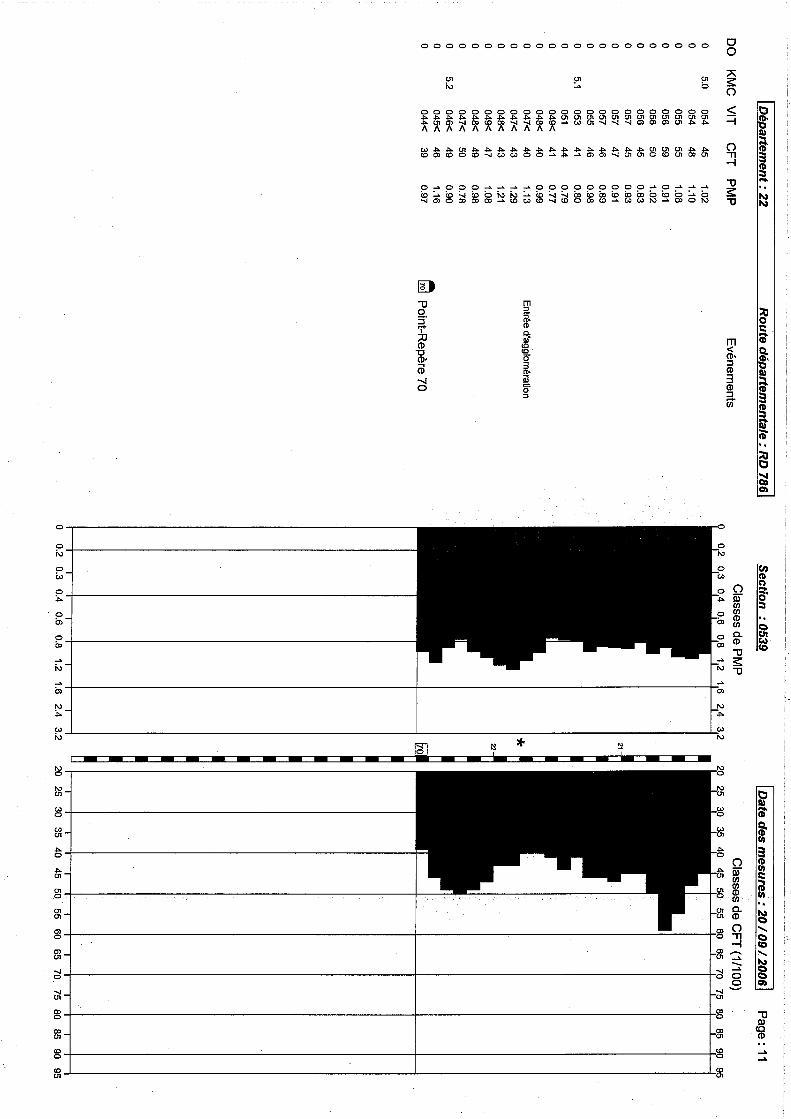
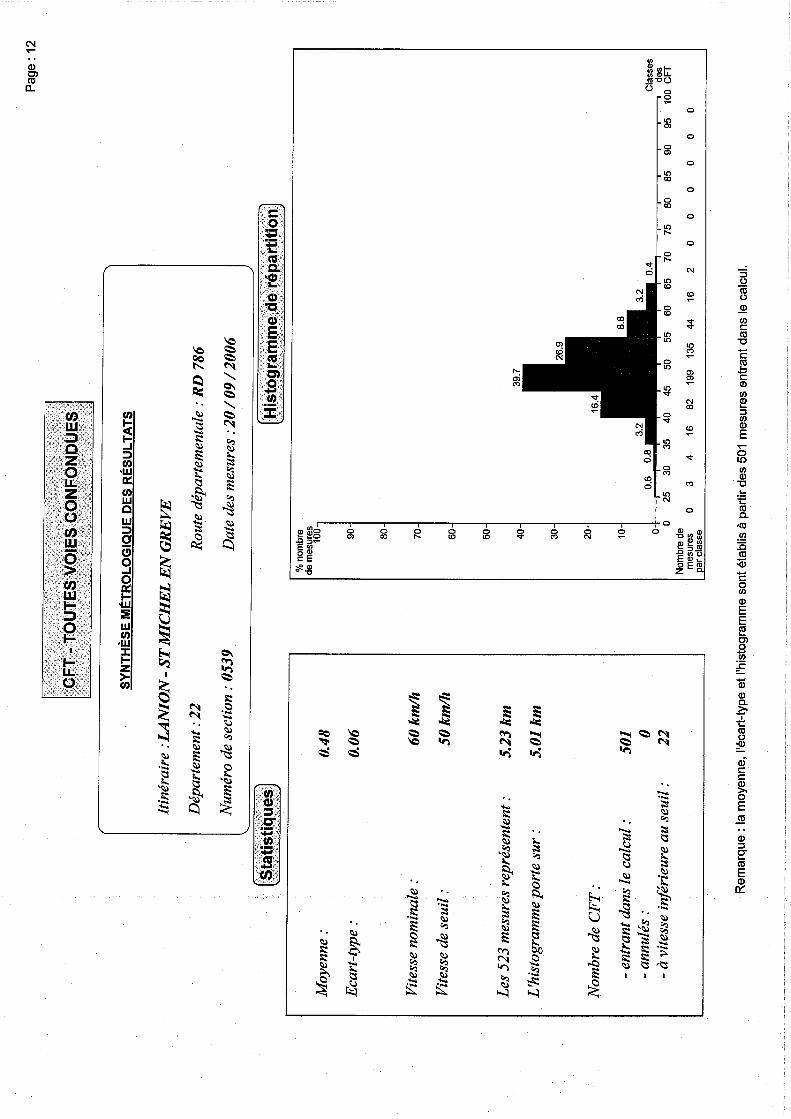
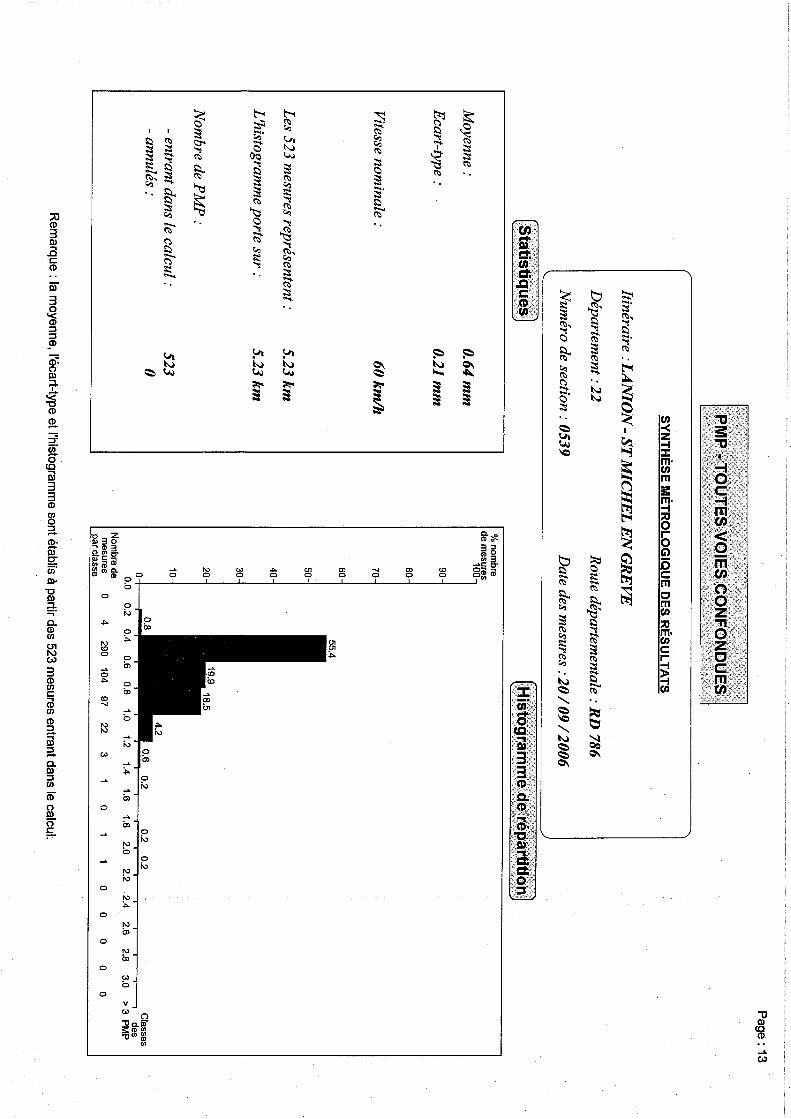
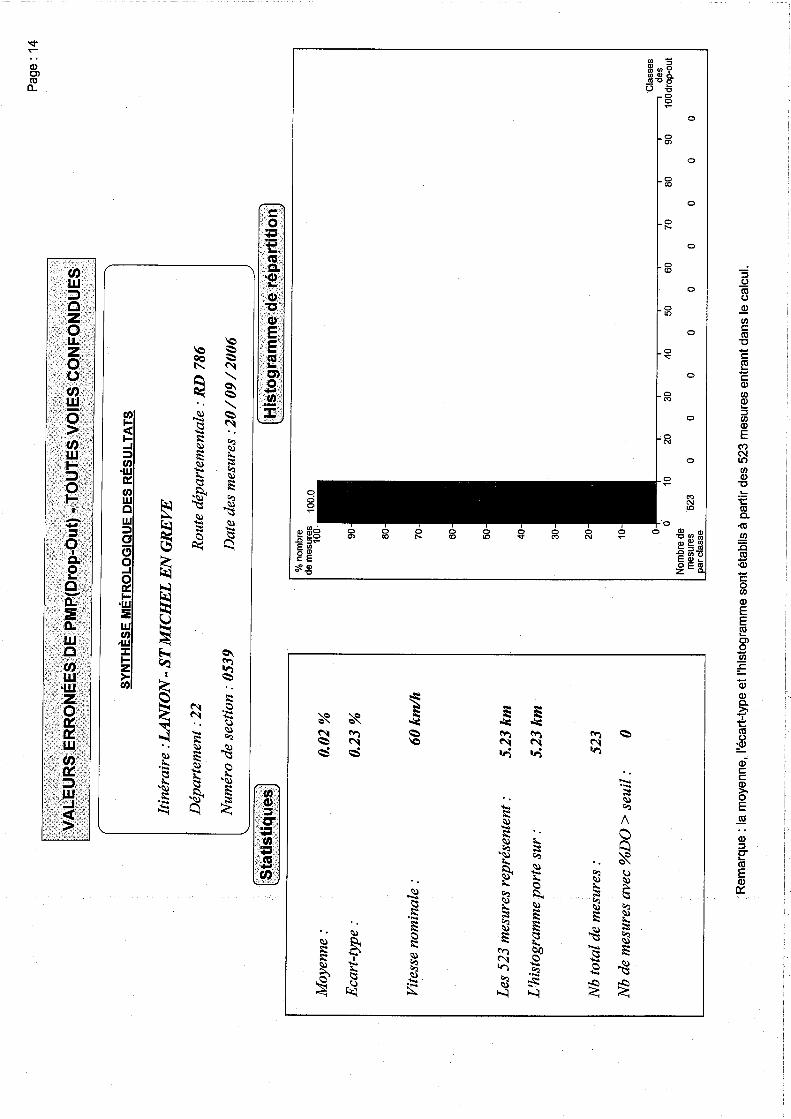
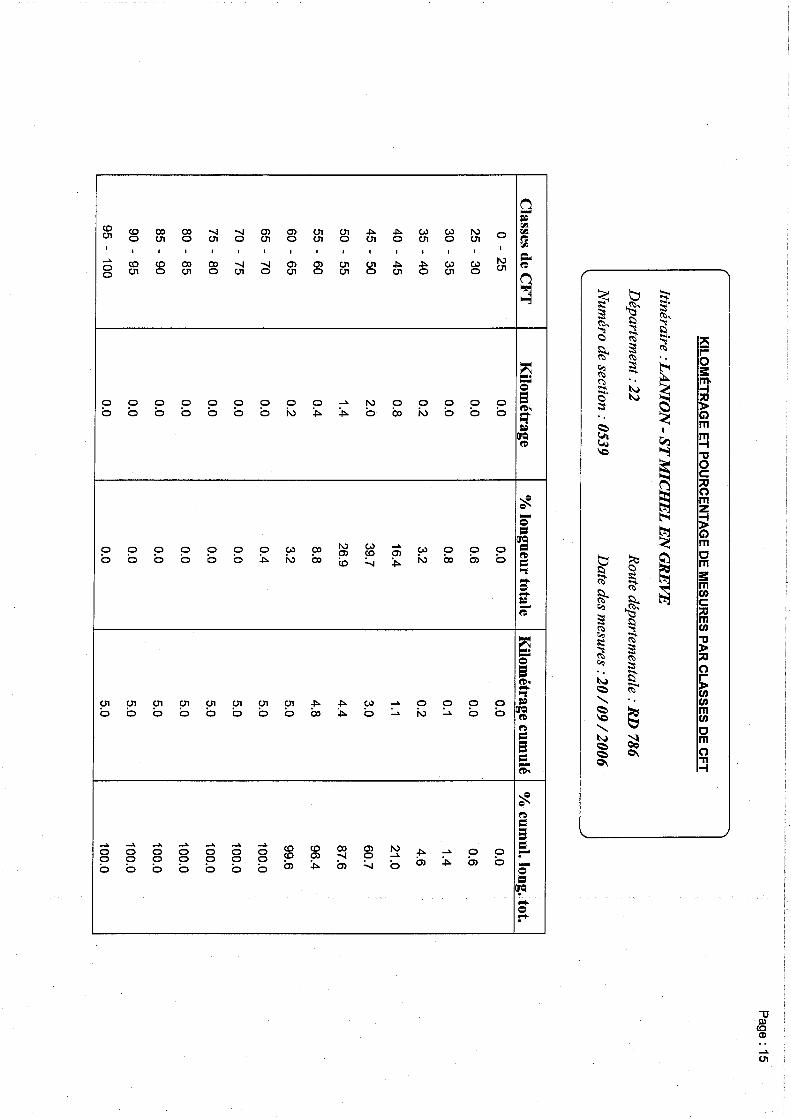
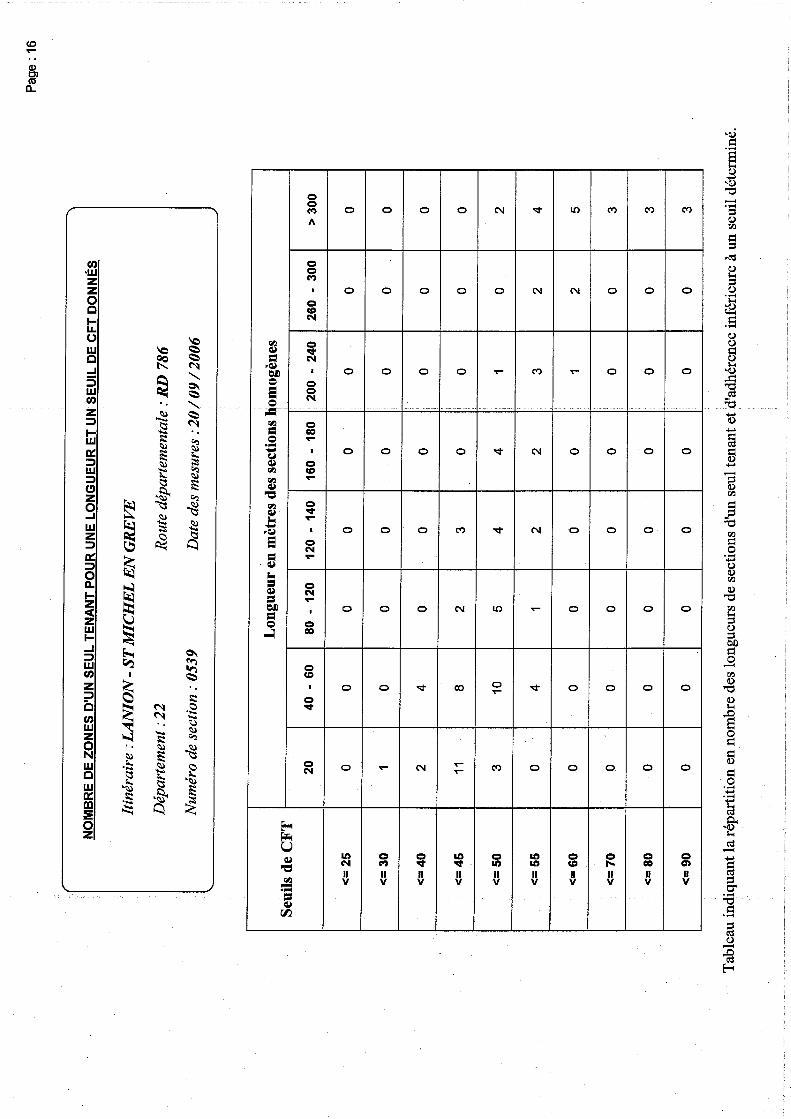
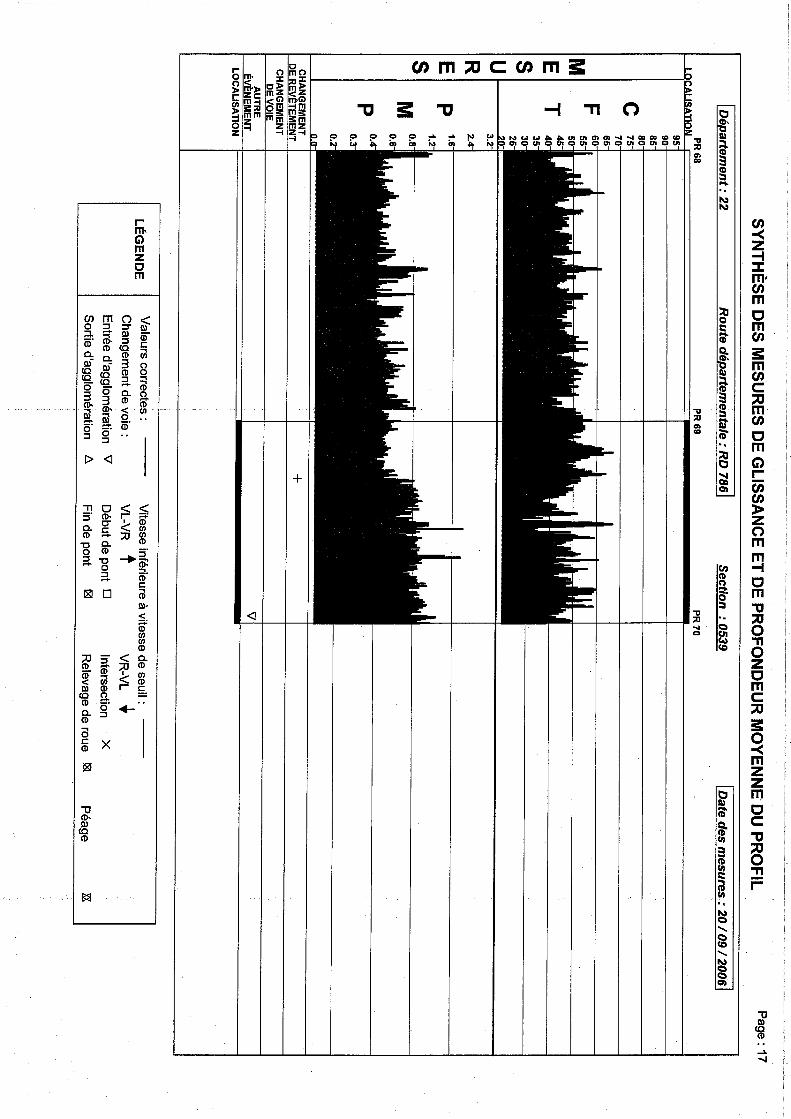
ANNEXE 4 : Résultats des mesures SCRIM+RUGO

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
36
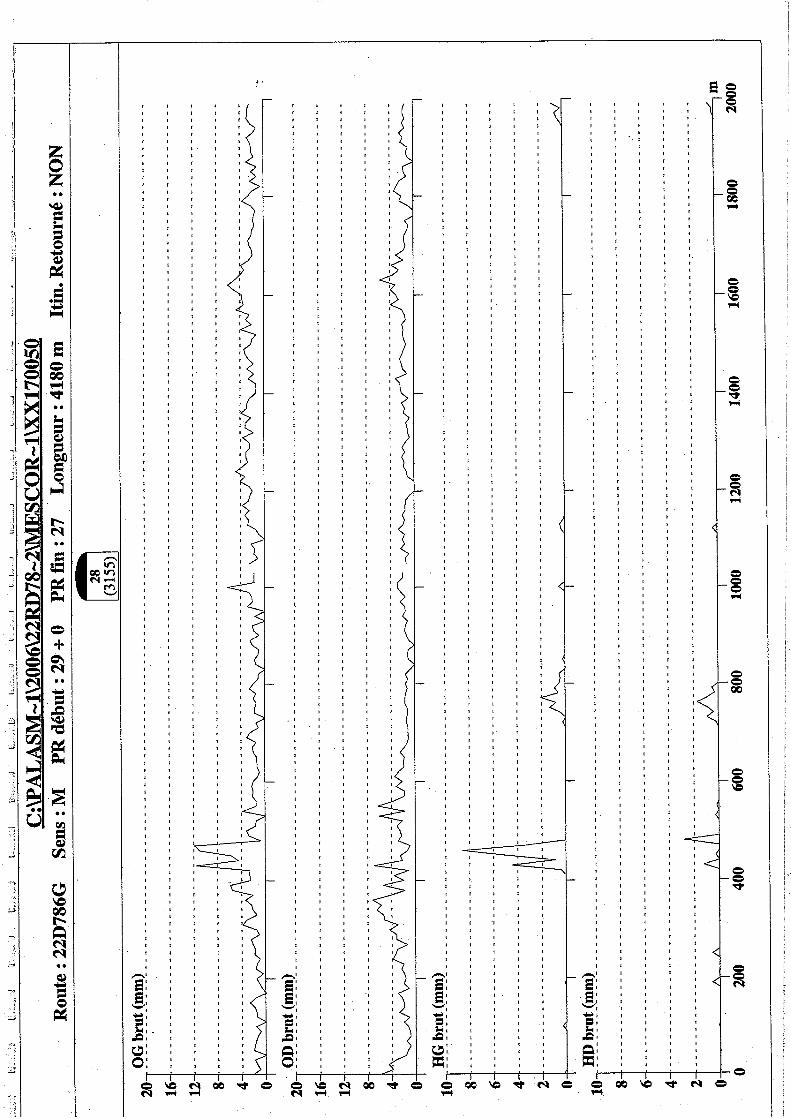
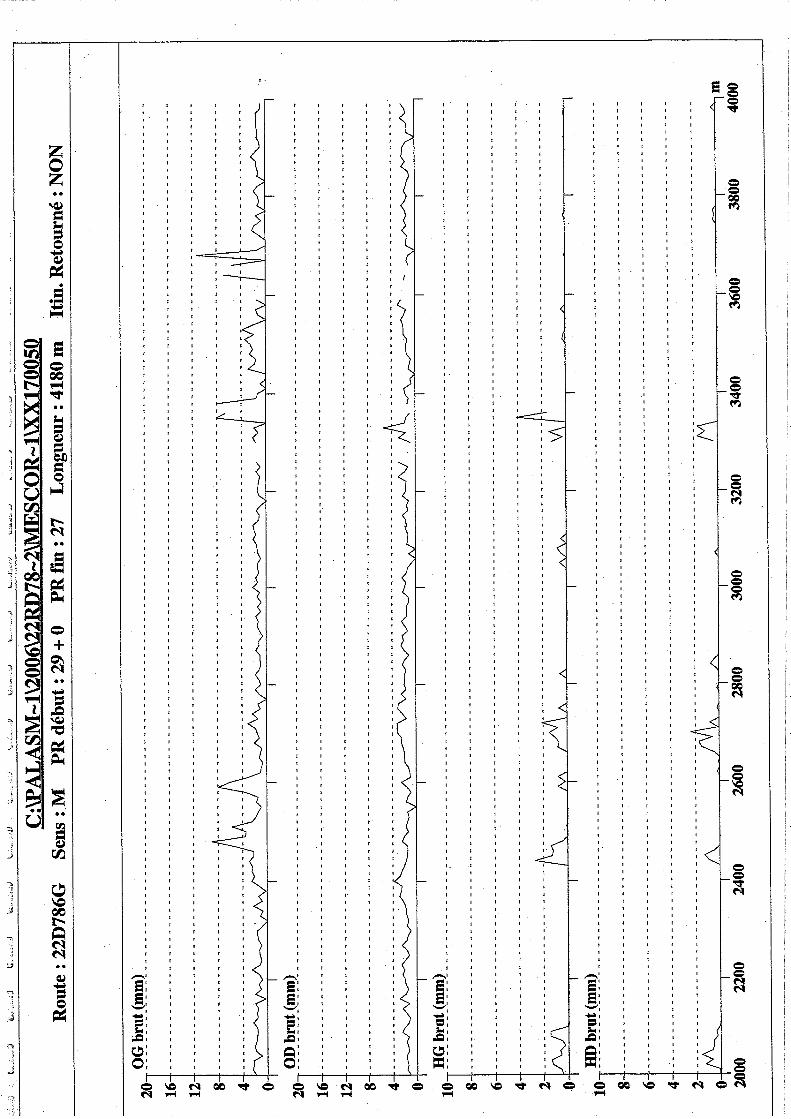
ANNEXE 5 : Résultats des mesures PALAS 2

SARI / Thème 3 IRCAD Livrable 1.3 Etat de mouillage critique
37
ANNEXE 6 : Exemples d’affichage des lignes d’écoulement