Embed Size (px)
Citation preview

TP Automatique GP2 (2007/2008)
2007/2008 Polytech' Clermont-Ferrand/ GP2, T. Chateau

Travaux pratiques d’automatique GP2,
2008-2009
T. Chateau
Introduction
Ce document est destine aux etudiants de Genie Physique 2eme anneeet presente le fonctionnement des seances de travaux pratiques, ainsi que lesprocedures de controle de connaissances.
Les TPs sont divises en 9 seances, suivies d’une seance d’examen. Ilsportent sur des applications abordees lors des cours d’automatique et delogique. Il est donc recommande aux etudiants de se munir de leurs courslors des seances.
Le contenu des Tps se divise en trois parties :
1. trois tps portant sur la logique combinatoire et sequentielle.
2. trois tps portant sur l’automatique lineaire continu,
3. trois tps portant sur l’automatique lineaire echantillonne,
La promotion est divisee en 2 groupes. Chaque groupe est compose, auplus, de 6 binomes ou trinomes. 9 seances sont prevues par groupe, plus uneseance de partiel.
1 Compte rendu
Avant le debut de chaque seance, le TP doit etre prepare. Un compterendu doit etre imperativement remis a l’enseignant a la fin de chaque seance(sauf pour la premiere seance ou le compte rendu pourra etre rendu en debutde seance 2). Ce dernier devra etre redige en suivant le modele de ce docu-ment. Il devra comporter, entre autres :
– Le numero du TP, titre et nom des etudiants,– Une introduction et une conclusion,– Les figures devront etre numerotees (afin d’y faire reference dans le
texte) et comporter une legende. Toute figure non commentee seraconsideree fausse.
1
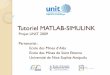
Binome/Seance S1 S2 S3 S4 S5 S6 S7 S8 S9date (2009) 03-04/02 10-11/02 24-25/02 03-04/03 10-11/03 17-18/03 24-25/03 31/3-1/4 21-22/04
B1 TP7 TP8 TP9 TP1 TP2 TP3 TP4 TP5 TP6B2 TP7 TP8 TP9 TP2 TP3 TP4 TP5 TP6 TP1B3 TP7 TP8 TP9 TP3 TP4 TP5 TP6 TP1 TP2B4 TP7 TP8 TP9 TP4 TP5 TP6 TP1 TP2 TP3B5 TP7 TP8 TP9 TP5 TP6 TP1 TP2 TP3 TP4B6 TP7 TP8 TP9 TP6 TP1 TP2 TP3 TP4 TP5
Table 1 – Recapitulatif des ordres de passage par binomes.
2 Notation
La note finale est divisee en 3 parties :
1. une partie prenant en compte le comportement oral de l’etudiant durantle TP,
2. une partie portant sur les compte-rendus,
3. une note de controle final, attribuee pendant la dixieme seance. Il s’agitd’un oral d’environ 15min. Chaque binome sera interroge sur l’ensembledes TPs effectues.
Lors de l’analyse d’un systeme asservi corrige, il est indispensable de releveret commenter les quatre signaux suivants : la consigne, l’erreur, la commandeet la sortie du systeme. L’oubli d’une seule de ces quatre courbes impliqueraune analyse incomplete du systeme.
3 Conclusion
Tout compte rendu doit contenir une conclusion aucour de laquelle lesprinpipaux points du Tp sont rapelles, ainsi que les eventuelles difficultestechniques ou theoriques rencontrees.
2

Polytech' Clermont-Ferrand TP1
A. Benzerrouk, T. Chateau GP
Régulation de niveau d’eau
1

Polytech' Clermont-Ferrand TP1
A. Benzerrouk, T. Chateau GP
Polytech' Clermont-Ferrand TP1
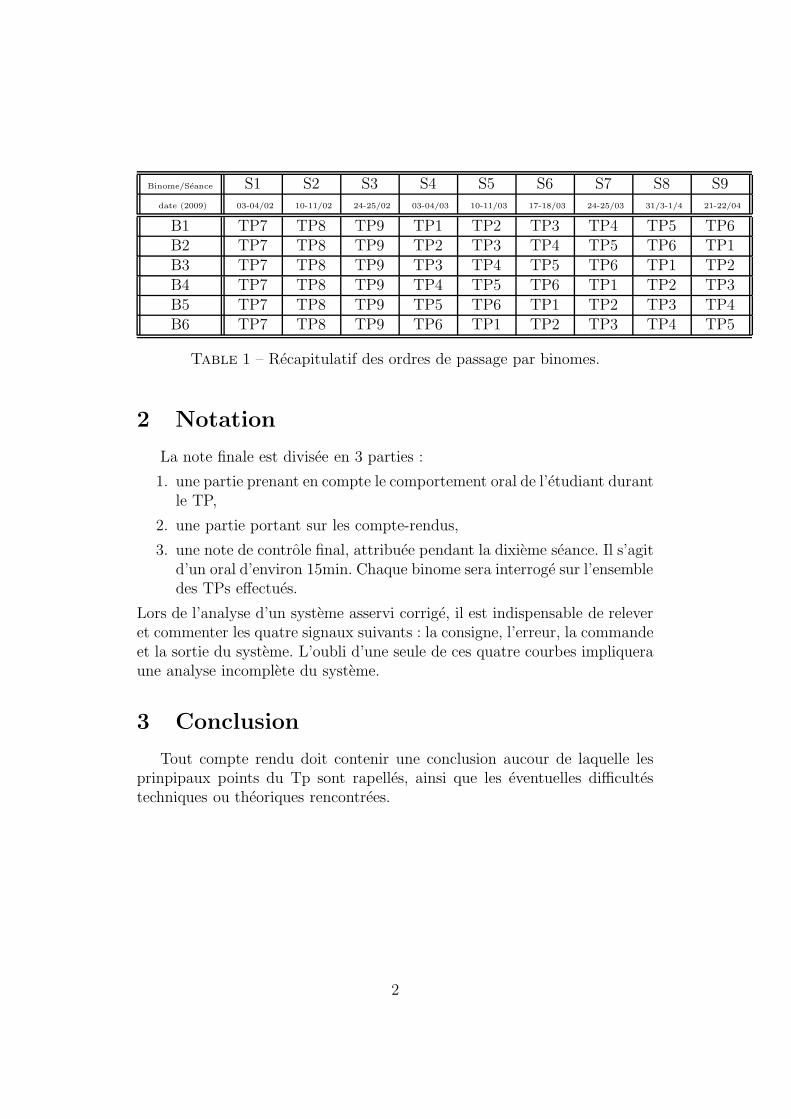
4. Travail demandé.
4.1) Identification du système.Le système à asservir n'est pas linéaire. Néanmoins, afin d'utiliser des outils de l'automatique linéaire, on considère qu'il est linéarisable autour d'un point de fonctionnement. Dans ce cas, il est assimilable à un système du premier ordre.L'identification de ce système s'effectue, par exemple, à l'aide d'un essai à un échelon, autour du point de fonctionnement. Comme le système est bouclé, il faut l'identifier à partir d'un essai en boucle fermée.
– Donner l'expression générale de la fonction de transfert d'un système continu du premier ordre.
– Montrer que ce système est toujours un système du premier ordre lorsqu'il est bouclé.– Effectuer un essai à un échelon et déterminer les caractéristiques du système (son gain
statique et sa constante de temps). Le gain proportionnel sera réglé à 10 pour l'identification. de plus, une seule des deux vannes sera ouverte.
4.2) Correction du système par un régulateur proportionnelDans cette partie, le système va être corrigé par un régulateur proportionnel. - Expliquer le principe de ce type de correcteur.– Calculer, de manière théorique, l'erreur statique du premier ordre du système bouclé.– Vérifier ce résultat par un essai expérimental. – Calculer La valeur du gain à appliquer pour diviser par 2 l'erreur statique.
A. Benzerrouk, T. Chateau GP

Polytech' Clermont-Ferrand TP1
– Vérifier votre calcul par un essai.– Que se passe-t-il lorsque l'on ouvre la deuxième vanne ?
4.3) Correction du système par un régulateur proportionnel intégralDans cette partie, le système va est corrigé par un régulateur proportionnel intégral.-Expliquer le principe de ce type de correcteur-Relever, pour différentes valeurs du gain intégrateur, le comportement du signal de sortie devant un échelon.
Concluez en comparant le comportement du système avec un correcteur proportionnel et un correcteur intégral
A. Benzerrouk, T. Chateau GP

Polytech’ Clermont-Ferrand Tp2 gp2
TP2 : Correction d’un système continu d’ordre 1
1 Introduction
Le but de ce TP est d’étudier l’asservissement d’un système du premier ordre. Lapremière partie concerne l’identification du système. La deuxième partie aborde l’étude dusystème en boucle fermée. Dans la troisième partie, l’effet d’un correcteur proportionnel estanalysé. Dans la dernière partir, bous devrez concevoir un correcteur proportionnel intégralet étudier son comportement sur le système du premier ordre. Ce tp doit être préparé afind’éviter de passer trop de temps pour les calculs durant la séance.
Lorsque vous analysez le comportement d’un système, il est important d’ob-server la consigne, l’erreur, la commande et la sortie du système.
2 Identification du système
2.1 Préparation
On considère que le système est linéaire dans une plage de variation entre −12V et+12V .
– Quelles sont les méthodes expérimentales que vous connaissez pour identifier unsystème d’ordre 1 ?
– Rappeler le principe d’identification d’un système d’ordre 1 à partir d’un essais à unéchelon.
2.2 Manipulation
Effectuez l’identification du système à partir d’un essai à un échelon. Ce dernier seragénéré à partir d’un signal carré (GBF) réglé à une fréquence suffisamment faible pourobserver le temps de montée du système.
3 Etude du système asservi
3.1 Préparation
– Comment peut-on réaliser un block comparateur à l’aide d’un montage à base d’am-plificateurs opérationnels ?
– Que devient un système d’ordre 1 en boucle fermé ?– Quelles sont les nouvelles performances du système obtenu par rapport à celles du
système en boucle ouverte (temps de montée, gain statique) ?– Donner l’expression de l’erreur statique d’ordre 1 du système asservi.
A Benzerrouk, T Chateau 1 gp2

Polytech’ Clermont-Ferrand Tp2 gp2
3.2 Manipulation
– Réaliser l’asservissement à l’aide du block comparateur présent sur la platine etcomparer les performances du système obtenu à celle du système en boucle ouverte.
– Les mesures effectuées correspondent-elles aux calculs théoriques ?
4 Etude d’un correcteur proportionnel
On place maintenant un correcteur proportionnel dans la boucle de régulation.
4.1 Prépapration
– Comment peut-on réaliser un block proportionnel à l’aide d’un montage à base d’am-plificateurs opérationnels ?
– On souhaite diminuer l’erreur statique d’un facteur 2. Calculer l’expression du gainproportionnel à régler en fonction du gain du système.
4.2 Manipulation
Utilisez le block proportionnel pour régler la valeur du correcteur désiré. Vérifier quele système se comporte comme prévu
5 Etude d’un correcteur proportionnel intégral
On place maintenant un correcteur proportionnel intégral dans la boucle de régulation :
C(p) = Kc.
(1 +
1τi.p
)
5.1 Prépapration
– Comment peut-on réaliser un block proportionnel intégral à l’aide d’un montage àbase d’amplificateurs opérationnels ?
– En utilisant la méthode compensation de pôles (τi = τ), calculer l’expression de lafonction de transfert du système corrigé en BF.
– En déduire l’expression de Kc qui conduit à un temps de monté identique à celuidésiré pour le correcteur proportionnel intégral.
– Calculer l’erreur statique d’odre 1
5.2 Manipulation
Effectuez les tests permettant de valider les calculs réalisés dans la préparation.
A Benzerrouk, T Chateau 2 gp2

Polytech’ Clermont-Ferrand Tp3 gp
TP3 : Synthèse d’un correcteur proportionnel dérivé
Le but de ce TP est d’étudier, en simulation, la synthèse d’un correcteur continu detype proportionnel dérivé, sur un asservissement de position. Cette étude sera réalisée aumoyen du logiciel Matlab Simulink.
1 Utilisation de Matlab Simulink
Simulink est un module de Matlab destiné à fournir des outils graphiques de conceptionde systèmes. Sa nature intuitive et sa conception par blocs en font un logiciel très simple àutiliser. Grace à un module temps réel, il peut être interfacé à une carte d’entrées sortiesanalogiques.
L’appel de l’interface Simulink s’effectue à partir d’une icône présente dans la barred’outils de Matlab. L’utilisateur a alors accès à une fenêtre dans laquelle les blocs sontregroupés sous la forme de familles, et à un espace de travail. Ce dernier permet d’insérerdes blocs par simple « drag and drop », et de les interconnecter entre eux par des liens.Les propriétés de chaque bloc peuvent être accessibles et modifiables par un double clic dubouton de gauche de la souris sur le bloc.
Une simulation temporelle du système obtenu s’effectue par une commande située dansla barre d’outils de la fenêtre Simulink. Les paramètres de cette simulation sont égalementmodifiables. La figure ?? montre la position des principales commandes accessibles depuisune fenêtre de matlab simulink.
Vous avez à votre disposition un fichier nommé blocs.mdl, que vous pouvez ouvrir àpartir de Matlab Simulink (cf. fig ??). Ce fichier contient les différents blocs qui vous serontutiles pour la conception de vos schémas. Pour créer un schéma, il suffit de selectionner lesous-menu nouveau schéma, dans le menu fichier.
Un exemple d’asservissement sur un procédé simulé est donné sur la figure ??.
2 Enoncé du TP
Ce TP concerne l’étude d’un asservissement de position. Une première partie est consa-crée à l’identification du système. Un correcteur de type proportionnel dérivée est calculédans la deuxième partie, à partir de performances à atteindre sur le système corrigé.
2.1 Identification du système
On suppose que le procédé (asservissement de position) est modélisé, en boucle ouverte,par une fonction de transfert du type :
G(p) =K0
p(1 + τp)
Nous proposons d’identifier ce procédé à partir d’un essai en boucle fermée.
A. Benzerrouk, T. Chateau 1 gp

Polytech’ Clermont-Ferrand Tp3 gp
Figure 1 – Sélection des briques utilisées pour concevoir les schèmas d’assevissement.
1. Calculer l’expression de la fonction de transfert du système en boucle fermée etmontrer qu’elle peut se mettre sous la forme :
H(p) =1
1 +2ξ
ω0
p +p2
ω2
0
2. Effectuer, sous matlab Simulink, une simulation permettant de relever la réponse à
un échelon du système en boucle fermée. (prendre G(p) =1.25
p(1 + 1.25p))
3. Déduire, à partir de cette réponse, les valeurs de ξ et ω0, puis, cette de K0 et τ .Vérifier que l’on retrouve bien les valeurs initiales
2.2 Calcul d’un correcteur Proportionnel Dérivée
On désire modifier la dynamique du système asservi identifié dans la section précédente.
1. On cherche à obtenir, un nouveau système, dont les performances sont les suivantes :
(a) une erreur de position nulle (contrainte déjà satisfaite par l’intégrateur naturel-lement présent dans le système),
(b) un dépassement de D = 4.6%
(c) un temps de pic : Tpic = 2.2s
2. Calculer l’expression Hd(p) de la fonction de transfert du second ordre désirée, cor-respondant au cahier des charges (vous pouvez vous aider du tableau donné dans lafigure ??)
3. On dérise utiliser un correcteur de type Proportionnel Dérivée donc la forme est :
C(p) = Kc
1 +Td.p
1 +Td
N.p
A. Benzerrouk, T. Chateau 2 gp

Polytech’ Clermont-Ferrand Tp3 gp
ouvrir le menuSimulink
Lancer une Simulation
Stopper une simulation
Nouveau model
Figure 2 – Principales commandes accessibles depuis matlab Simulink.
avec N > 1.Montrer que ce correcteur peut se mettre sous la forme :
C(p) = Kc
1 + a.p
1 + b.p
avec une relation d’ordre entre a et b.
4. Le principe de la correction est de compenser le pôle de G(p) par un zero identiquesur C(p). Qu’en déduit on sur a ?
5. Calculer alors l’expression de la fonction de transfert du système corrigé en bouclefermée, sous la forme :
Hd(p) =1
1 +2ξ
ω0
p +p2
ω2
0
6. Par identification, calculer la valeur numérique de a et Kc. En déduire celles de N
et Td
2.3 Analyse du système corrigé
1. Valider le calcul de votre correcteur en simulant le système asservi et en vérifiant queces performances sont bien celles attendues. Pour ce faire, vous devez observer :– la consigne,– le signal d’erreur,– le signal de commande,– la sortie.
2. Observer le comportement du système face à des perturbations de type créneaux, quiviennent s’ajouter au signal de sortie.
A. Benzerrouk, T. Chateau 3 gp

Polytech’ Clermont-Ferrand Tp3 gp
Figure 3 – Exemple d’asservissement d’un procédé simulé.
Figure 4 – Tableau des valeurs associés à un système du second ordre.
A. Benzerrouk, T. Chateau 4 gp

Polytech’ Clermont-Ferrand Tp4 gp2
TP4 : Correction numérique d’un second ordre
Le but de ce TP est d’étudier le comportement réel d’un système corrigé numérique-ment. Cette étude sera réalisée au moyen du logiciel Matlab Simulink, relié à une carte decontrôle/commande.
1 Utilisation de Matlab Simulink
Simulink est un module de Matlab destiné à fournir des outils graphiques de conceptionde systèmes. Sa nature intuitive et sa conception par blocs en font un logiciel très simple àutiliser. Grace à un module temps réel, il peut être interfacé à une carte d’entrées sortiesanalogiques.
L’appel de l’interface Simulink s’effectue à partir d’une icône présente dans la barred’outils de Matlab. L’utilisateur a alors accès à une fenêtre dans laquelle les blocs sontregroupés sous la forme de familles, et à un espace de travail. Ce dernier permet d’insérerdes blocs par simple « drag and drop », et de les interconnecter entre eux par des liens.Les propriétés de chaque bloc peuvent être accessibles et modifiables par un double clic dubouton de gauche de la souris sur le bloc.
Une simulation temporelle du système obtenu s’effectue par une commande située dansla barre d’outils de la fenêtre Simulink. Les paramètres de cette simulation sont égalementmodifiables.
Vous avez à votre disposition un fichier nommé blocs.mdl, que vous pouvez ouvrir àpartir de Matlab Simulink (cf. fig 1, 2). Ce fichier contient les différents blocs qui vous serontutiles pour la conception de vos schémas. Pour créer un schéma, il suffit de selectionner lesous-menu nouveau schéma, dans le menu fichier.
Le bloc RtOut Async permet d’envoyer un signal analogique sur la sortie de la cartePC, reliée à l’entrée du système à réguler. La commande à envoyer doit se situer entre -0.5et +0.5 (équivalent à -5V, +5V ; amplitudes en pourcentage par rapport à la valeur finalede la sortie de 10V).
Le bloc RtIn permet de mesurer le signal analogique présent sur une entrée de la cartePC, reliée à la sortie du système à réguler. Attention : Cette mesure s’effectue à unecadence d’échantillonnage que vous devez indiquer dans les propriétés du bloc (double clicsur le bloc). De plus, cette brique contient un bloqueur d’ordre 0. Les valeurs mesuréespar cette brique varient entre -1 et 1 (équivalent à -10V, +10V).
Le bloc Adapter permet de spécifier le type et la configuration de la carte PC utilisée.Il est obligatoire dans chaque schéma utilisant cette carte.
La plupart des blocs comportent un réglage de la période d’échantillonnage.Un exemple d’asservissement réel est donné sur la figure 2 et un exemple d’asservisse-
ment sur un procédé simulé est donné sur la figure 3.
2 Enoncé du TP
Ce TP concerne l’étude de la correction numérique d’un système du second ordre en si-mulation puis en fonctionnement réel. On disposera, pour cela d’une maquette pédagogique
A. Benzerrouk, T. Chateau 1 gp2
Polytech’ Clermont-Ferrand Tp4 gp2
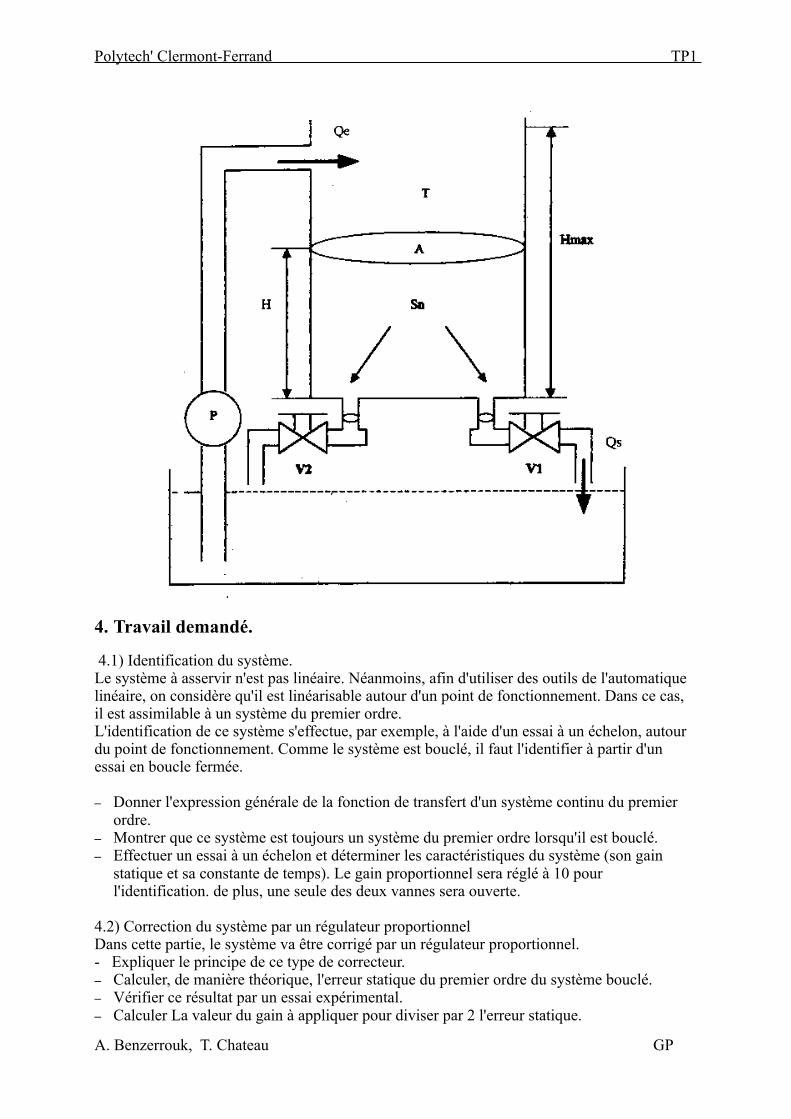
Figure 1 – Sélection des briques utilisées pour concevoir les schèmas d’assevissement.
comprenant un système du second ordre.
2.1 Identification du système
On suppose le procédé réel à corriger comme étant du second ordre et l’on cherchera àétablir sa fonction de transfert.
2.1.1 Identification des paramètres de la fonction de transfert
– Déterminer expérimentalement la fonction de transfert du procédé du second ordredonnée par :
G(p) =K
1 +2.ξ
ω0
p +
(
p
ω0
)2(1)
Envoyer un échelon de faible amplitude à une fréquence d’échantillonnage élevée(Te = 25ms) et en déduire le temps de monté, le dépassement et le gain statique K
donné par la formule K =∆S
∆E. A l’aide des formules vues dans le cour, déduire ξ et
ω0 du dépassement et du temps de montée.
A. Benzerrouk, T. Chateau 2 gp2

Polytech’ Clermont-Ferrand Tp4 gp2
ouvrir le menuSimulink
Lancer une Simulation
Stopper une simulation
Nouveau model
Figure 2 – Exemple d’asservissement d’un procédé réel et signification des principalescommandes.
– Calculer la fonction de transfert H(z−1) correspondant à la discrétisation du procédéprécédé d’un bloqueur d’ordre 0 avec une période d’échantillonnage de 0.1s. Pourcela, vous utiliserez les formules vues en cours, permettant de calculer la fonction detransfert d’un système du second ordre.
2.2 Etude du système non corrigé
2.2.1 système en boucle ouverte
Vérifiez l’exactitude du calcul de H(z−1) en effectuant un essai à un échelon en boucleouverte du système simulé. Mesurez le dépassement, le temps de montée et le gain statique.
Figure 3 – Exemple d’asservissement d’un procédé simulé.
A. Benzerrouk, T. Chateau 3 gp2
Polytech’ Clermont-Ferrand Tp4 gp2
2.2.2 Système en boucle fermée
Effectuer un essai à un échelon du système bouclé. Que se passe-t-il ? pourquoi ?
2.3 Correction du système
– Déterminer un correcteur à pôles dominants permettant au système bouclé d’obtenirles performances suivantes :– dépassement nul (on considère un dépassement nul s’il est inférieur à 5%),– temps de montée tm = 4Te = 400ms,– erreur indicielle nulle.
– Vérifier le bon fonctionnement du correcteur sur le procédé simulé. Pour simuler laprésence de perturbations, vous pouvez ajouter un bloc additionneur, entre la com-mande et le système, avec un échelon retardé simulant une perturbation constante.
– Observer le comportement du correcteur sur le procédé réel.
A. Benzerrouk, T. Chateau 4 gp2

Polytech’ Clermont-Ferrand Tp5 gp2
TP5 : Correction numérique d’un moteur
Le but de ce TP est d’étudier le comportement réel d’un système corrigé numérique-ment. Cette étude sera réalisée au moyen du logiciel Matlab Simulink, relié à une carte decontrôle/commande.
1 Utilisation de Matlab Simulink
Simulink est un module de Matlab destiné à fournir des outils graphiques de conceptionde systèmes. Sa nature intuitive et sa conception par blocs en font un logiciel très simple àutiliser. Grace à un module temps réel, il peut être interfacé à une carte d’entrées sortiesanalogiques.
L’appel de l’interface Simulink s’effectue à partir d’une icône présente dans la barred’outils de Matlab. L’utilisateur a alors accès à une fenêtre dans laquelle les blocs sontregroupés sous la forme de familles, et à un espace de travail. Ce dernier permet d’insérerdes blocs par simple « drag and drop », et de les interconnecter entre eux par des liens.Les propriétés de chaque bloc peuvent être accessibles et modifiables par un double clic dubouton de gauche de la souris sur le bloc.
Une simulation temporelle du système obtenu s’effectue par une commande située dansla barre d’outils de la fenêtre Simulink. Les paramètres de cette simulation sont égalementmodifiables.
Vous avez à votre disposition un fichier nommé blocs.mdl, que vous pouvez ouvrir àpartir de Matlab Simulink (cf. fig 1, 2). Ce fichier contient les différents blocs qui vous serontutiles pour la conception de vos schémas. Pour créer un schéma, il suffit de selectionner lesous-menu nouveau schéma, dans le menu fichier.
Le bloc RtOut Async permet d’envoyer un signal analogique sur la sortie de la cartePC, reliée à l’entrée du système à réguler. La commande à envoyer doit se situer entre -0.5et +0.5 (équivalent à -5V, +5V ; amplitudes en pourcentage par rapport à la valeur finalede la sortie de 10V).
Le bloc RtIn permet de mesurer le signal analogique présent sur une entrée de la cartePC, reliée à la sortie du système à réguler. Attention : cette mesure s’effectue à unecadence d’échantillonnage que vous devez indiquer dans les propriétés du bloc (double clicsur le bloc). De plus, cette brique contient un bloqueur d’ordre 0. Les valeurs mesuréespar cette brique varient entre -1 et 1 (équivalent à -10V, +10V).
Le bloc Adapter permet de spécifier le type et la configuration de la carte PC utilisée.Il est obligatoire dans chaque schéma utilisant cette carte.
La plupart des blocs comportent un réglage de la période d’échantillonnage.Un exemple d’asservissement réel est donné sur la figure 2 et un exemple d’asservisse-
ment sur un procédé simulé est donné sur la figure 3.
2 Enoncé du TP
Ce TP concerne l’étude de la correction numérique d’un asservissement de vitesse en si-mulation puis en fonctionnement réel. On disposera, pour cela d’une maquette pédagogique
A. Benzerrouk, T. Chateau 1 gp2
Polytech’ Clermont-Ferrand Tp5 gp2
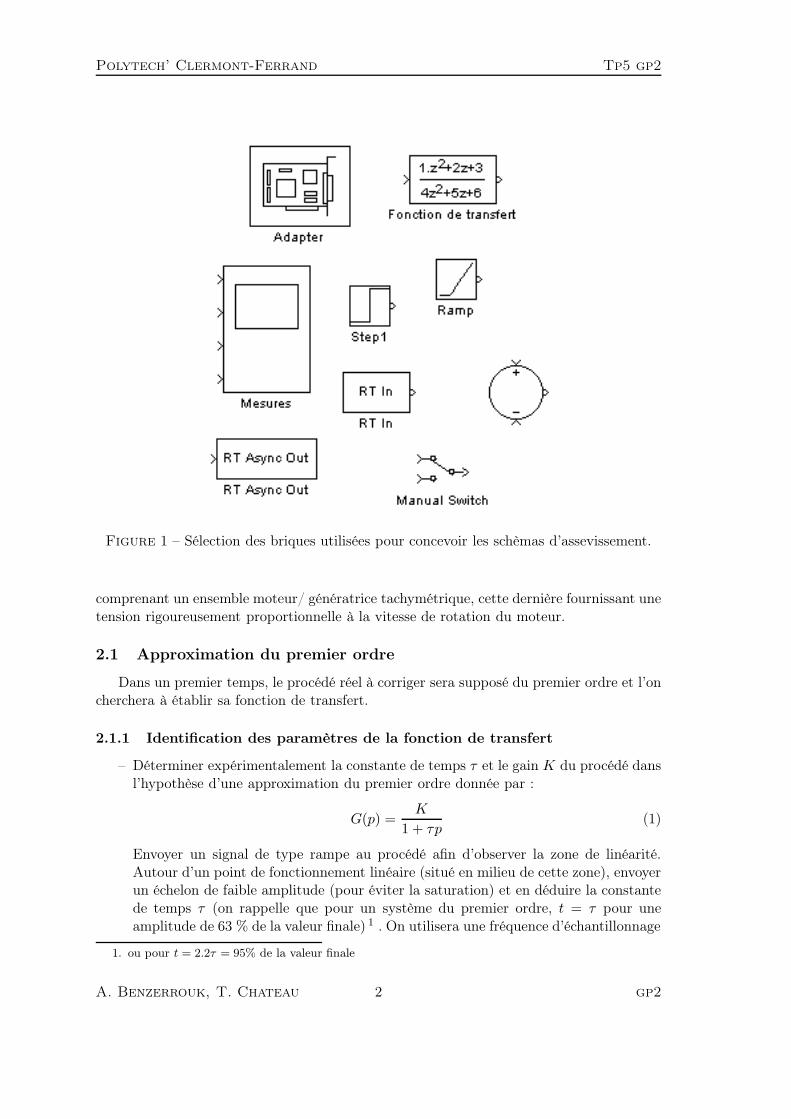
Figure 1 – Sélection des briques utilisées pour concevoir les schèmas d’assevissement.
comprenant un ensemble moteur/ génératrice tachymétrique, cette dernière fournissant unetension rigoureusement proportionnelle à la vitesse de rotation du moteur.
2.1 Approximation du premier ordre
Dans un premier temps, le procédé réel à corriger sera supposé du premier ordre et l’oncherchera à établir sa fonction de transfert.
2.1.1 Identification des paramètres de la fonction de transfert
– Déterminer expérimentalement la constante de temps τ et le gain K du procédé dansl’hypothèse d’une approximation du premier ordre donnée par :
G(p) =K
1 + τp(1)
Envoyer un signal de type rampe au procédé afin d’observer la zone de linéarité.Autour d’un point de fonctionnement linéaire (situé en milieu de cette zone), envoyerun échelon de faible amplitude (pour éviter la saturation) et en déduire la constantede temps τ (on rappelle que pour un système du premier ordre, t = τ pour uneamplitude de 63 % de la valeur finale) 1 . On utilisera une fréquence d’échantillonnage
1. ou pour t = 2.2τ = 95% de la valeur finale
A. Benzerrouk, T. Chateau 2 gp2

Polytech’ Clermont-Ferrand Tp5 gp2
ouvrir le menuSimulink
Lancer une Simulation
Stopper une simulation
Nouveau model
Figure 2 – Exemple d’asservissement d’un procédé réel et signification des principalescommandes.
minimale (25ms).– Calculer la fonction de transfert H(z−1) correspondant à la discrétisation du procédé
précédé d’un bloqueur d’ordre 0 avec une période d’échantillonnage de 75ms.
2.1.2 Correction du système
– Déterminer un correcteur à pôles dominants permettant au système bouclé d’obtenirles performances suivantes :– dépassement nul (on considère un dépassement nul s’il est inférieur à 5%),– temps de montée tm = 3Te = 225ms,– erreur indicielle nulle.
Figure 3 – Exemple d’asservissement d’un procédé simulé.
A. Benzerrouk, T. Chateau 3 gp2

Polytech’ Clermont-Ferrand Tp5 gp2
+
-
T (z) 1/S(z)
R(z)
B0G(z)e(z) y(z)ǫ(z)
Figure 4 – Structure RST.
– Vérifier le bon fonctionnement du correcteur sur le procédé simulé. Pour simulerla présence de perturbations, vous pouvez ajouter un bloc additionneur, entre lacommande et le moteur, avec un échelon retardé simulant une perturbation constante.
– Observer le comportement du correcteur sur le procédé réel (dans la zone de linéarité).Vous pouvez observer l’effet des perturbations grâce à l’action de l’aimant présentsur la maquette.
2.2 Utilisation du modèle identifié
Un logiciel adapté (PIM) a permis l’identification plus précise de notre procédé et adonné la fonction de transfert suivante :
H(z−1) =0.2452z−1 + 0.0243z−2
1 − 0.6787z−1− 0.05z−2
avec Te = 75ms (2)
Deux correcteurs (de type PID numérique) ont été calculés à partir de cette fonction detransfert, le premier permet d’obtenir un temps de montée tm du système bouclé de 4Te =300ms pour un dépassement nul. Sa représentation est de type RST (voir figure 4) et lespolynômes R, S et T sont :
R1 = 4.1056 − 2.219z−1− 0.0642z−2
S1 = 1 − 0.9688z−1− 0.03118z−2
T1 = 1.822(3)
Le second permet un temps de montée tm = 2Te = 150ms pour un dépassement nul, lespolynômes R, S et T sont donnés par :
R2 = 5.9 − 2.494z−1− 0.1755z−2
S2 = 1 − 0.9148z−1− 0.0852z−2
T2 = 3.231(4)
2.3 Procédé simulé
Effectuer, pour chacun des deux correcteurs, les opérations suivantes :– Simuler la correction du procédé et vérifier les performances obtenues avec une
consigne de 1V (10%),– Effectuer la même opération avec une consigne de 4V (40%) et noter le comportement
du correcteur,– Appliquer des perturbations de type créneaux de différentes amplitudes et conclure
sur le choix du correcteur qui semble le plus approprié.
A. Benzerrouk, T. Chateau 4 gp2

Polytech’ Clermont-Ferrand Tp5 gp2
2.4 Procédé réel
– Effectuer la correction du procédé avec le premier correcteur et vérifier les perfor-mances temps de montée et dépassement du système corrigé. On choisira une consignede type échelon d’amplitude 1V (10%) autour d’un point de fonctionnement de 2Venviron.
– Appliquer une perturbation manuellement à l’aide du frein et observer la réponse dusystème.
– Effectuer les mêmes opérations avec le second correcteur et conclure sur les critèresde choix de l’un ou l’autre des deux correcteurs.
2.5 Diminution de Te
Une autre identification du procédé pour une période d’échantillonnage de 25ms a étéréalisée et a donné la fonction de transfert suivante :
H(z−1) =0.0812z−1
1 − 0.962z−1 + 0.081z−2avec Te = 25ms (5)
Pour cette fonction, un nouveau correcteur a été calculé. Il possède des performancesindicielles (tm et D) analogues au premier des deux correcteurs précédents.
Les polynômes R, S et T sont donnés par :
R2 = 5.52 − 2.668z−1− 0.996z−2
S2 = 1 − z−1
T2 = 0.825(6)
Essayer ce correcteur en simulé puis sur le procédé réel et conclure sur l’intérêt de diminuerla période d’échantillonnage.
A. Benzerrouk, T. Chateau 5 gp2

Polytech’ Clermont-Ferrand Tp6 gp2
TP6 : Synthèse d’un asservissement échantillonné
Introduction
Le but de ce TP est de mettre en oeuvre des techniques d’étude et de correctionnumérique de base pour les systèmes asservis linéaires échantillonnés.
Dans un premier temps, il s’agira d’analyser la boucle d’asservissement du système noncorrigé. Il faudra établir l’expression littérale des transmittances en z du système précédéd’un bloqueur d’ordre 0.
Dans une deuxième partie, il faudra calculer un correcteur numérique par la méthodedes pôles dominants. Le comportement de ce correcteur sera ensuite testé en simulation,puis comparé à deux autres types de correcteurs : le correcteur à réponse minimale et lecorrecteur à réponse pile).
La dernière section présente les grandes lignes de la boite à outils Simulink, disponiblesous matlab.
1 Etude du système sans correction
On souhaite asservir en position un système dont la fonction de transfert en boucleouverte est approximée par :
G(p) =K
p(p + a)
Le système en boucle fermée est représenté par la figure 1
+
-
Bloqueur MoteurE(z)
TT
ε(z)G(p) =
K
p(p + a)S(z)Bo(p)
GBo(z)
Ech
Figure 1 – Représentation du système non corrigé en boucle fernée
1.1 Etude théorique
Etablir l’expression littérale de la transmittance GBo(z−1) en boucle ouverte du sys-
tème muni de son bloqueur d’ordre zéro. Donner son expression numérique (a = 1 etT = 1s) sous la forme :
GBo(z−1) =
b1.z−1 + b2.z
−2
1 + a1.z−1 + a2.z−2
A. Benzerrouk, T. Chateau 1 gp2

Polytech’ Clermont-Ferrand Tp6 gp2
1.2 Analyse temporelle
Toute l’analyse temporelle s’effectuera sous Matlab Simulink. Vous devez créer unschèma nommé sys1.mdl dans lequel vous reproduirez :
– une boucle d’asservissement composée du système continu et de son bloqueur d’ordrezero,
– une seconde boucle d’asservissement composée de la transmittance GBo(z−1).
Vous validerez alors le calcul de GBo(z−1) en observant la réponse à un échelon dans le
cas des deux boucles.
2 Synthèse d’un correcteur par la méthode des pôles domi-nants (ZDAN)
On désire calculer un correcteur à pôles dominants assurant, pour une entrée de typeéchelon, les performances suivantes :
– pas d’erreur statique de position,– un dépassement D = 10%,– un temps de montée tm ≤ 2.5s
La figure 2 représente le système corrigé. Le correteur est représenté par la transmittanceC(z−1)
+
-
Bloqueur MoteurE(z)
TT
ε(z)C(z) G(p) =
K
p(p + a)S(z)Bo(p)
GBo(z)
Ech
Figure 2 – Représentation du système corrigé en boucle fermée
2.1 Etude théorique
1. En utilisant les caractéristiques des systèmes du second ordre, déterminer la valeurdes paramètres du système du second ordre souhaité (ξ et ω0).
2. Calculer la correcteur numérique C(z−1) satisfaisant ces caractéristiques.
2.2 Simulation et Analyse
1. Modifier le schéma simulink de la partie précédente afin d’ajouter (vous nommerezle nouveau schéma zdan.mdl) :
(a) le correcteur,
(b) un bloc additionneur entre la commande et le bloqueur sur lequel vous relierezune entrée de type créneaux afin d’observer le comportement du système corrigéface à des perturbations.
A. Benzerrouk, T. Chateau 2 gp2
Polytech’ Clermont-Ferrand Tp6 gp2
Afin de vous lancer dans le schéma, faites valider une version "papier"
2. Pour une entrée de type échelon, visualiser :– la consigne,– l’erreur,– la commande,– la sortie.
3. Analyser les courbes obtenues avec et sans perturbations. (Toute courbe non ana-lysée sera considérée non comprise). Que se passe-t-il aux instants d’echantillon-nage ? Que se passe-t-il entre les instants d’échantillonnage ? Pourquoi ?
3 Synthèse d’un correcteur par la méthode du système mini-
mal et pile
3.1 Système minimal
Le but est de calculer un correcteur minimal pour une entrée de type échelon.
1. Le correcteur à temps minimal est donné par :
C(z−1) = 2.71 − 0.37z−1
1 + 0.703z−1
2. Modifier le schéma zdan.mdl (renommé minimal.mdl) afin de visualiser :– l’entrée,– l’erreur,– la commande,– la sortie.
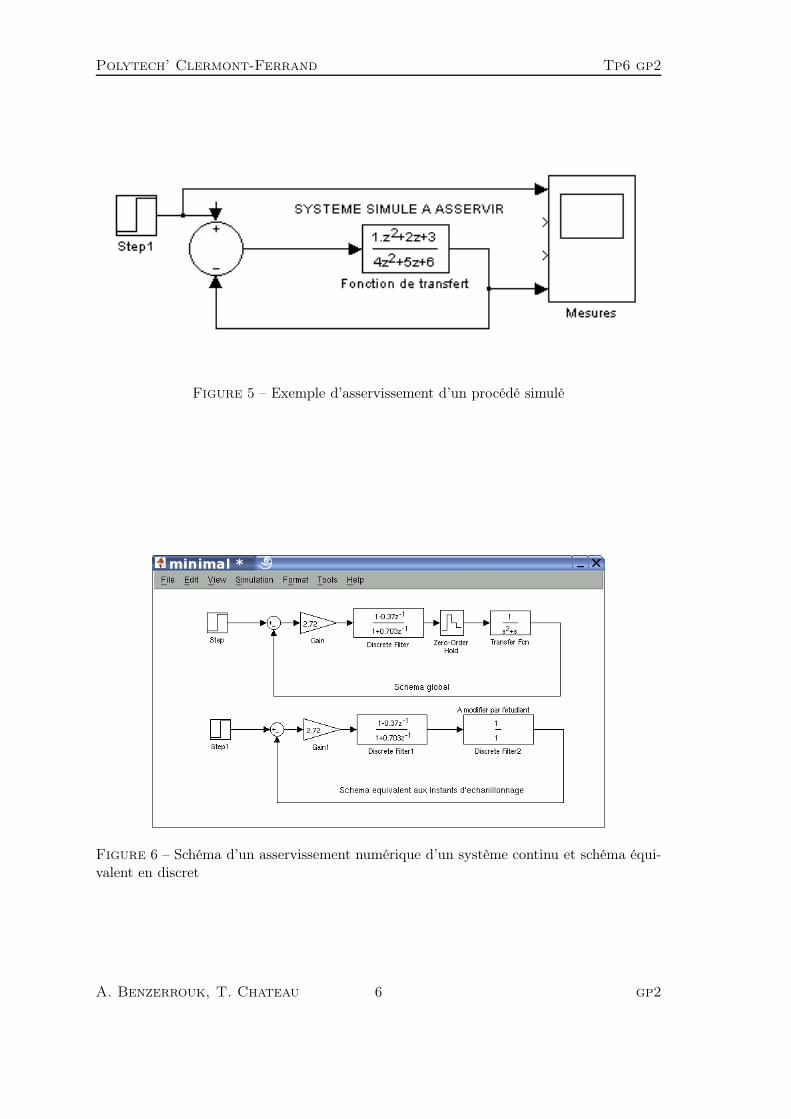
3. Analyser les courbes obtenues avec et sans perturbations. (Toute courbe non ana-lysée sera considérée non comprise). Que se passe-t-il aux instants d’echantillon-nage ? Que se passe-t-il entre les instants d’échantillonnage ? Pourquoi ?La figure 6 illustre le montage à réaliser pour étudier le comportementdu système en continu et aux instants d’échantillonnage.
3.2 Système à réponse pile
Le but est de calculer un correcteur à réponse pile pour une entrée de type échelon.
1. L’espression du correcteur à réponse pile est :
C(z−1) =1.58 − 0.582z−1
1 + 0.418z−1
2. Modifier le schéma zdan.mdl (renommé pile.mdl) afin de visualiser :– l’entrée,– l’erreur,– la commande,– la sortie.
3. Analyser les courbes obtenues avec et sans perturbations. (Toute courbe non ana-lysée sera considérée non comprise). Que se passe-t-il aux instants d’echantillon-nage ? Que se passe-t-il entre les instants d’échantillonnage ? Pourquoi ?
A. Benzerrouk, T. Chateau 3 gp2

Polytech’ Clermont-Ferrand Tp6 gp2
Annexe : utilisation de Matlab Simulink
Simulink est un module de Matlab destiné à fournir des outils graphiques de conceptionde systèmes. Sa nature intuitive et sa conception par blocs en font un logiciel trés simpleà utiliser. Grace à une carte de contrôle commande placée sur le bus PCI, et à unpilote Matlab Simulink associé, il est possible de piloter un système réel, directement sousl’environnement matlab.
L’appel de l’interface Simulink s’effectue à partir d’une icone présente dans la barred’outils de Matlab. L’utilisateur a alors accès à une fenêtre dans laquelle les blocs sontregroupés sous la forme de familles, et à un espace de travail. Ce dernier permet d’insérerdes blocs par simple drag and drop, et de les interconnecter entre eux par des liens. Lespropriétés de chaque bloc peuvent être accessibles et modifiables par un double clic dubouton de gauche de la souris sur le bloc.
Une simulation temporelle du système obtenu s’effectue par une commande située dansla barre d’outils de la fenêtre Simulink. Les paramètres de cette simulation sont égalementmodifiables.
Vous avez à votre disposition un fichier nommé blocs.mdl, que vous pouvez ouvrirà partir de Matlab Simulink (cf. fig 3). Ce fichier contient les différents blocs qui vous serontutiles pour la conception de vos schémas. Pour créer un schéma, il suffit de sélectionner lesous-menu nouveau schéma, dans le menu fichier.
Le bloc RtOut Async permet d’envoyer un signal analogique sur la sortie de la cartePC, reliée à l’entrée du système à réguler. La commande à envoyer doit se situer entre−0.5 et +0.5 (équivalent à -5V, +5V ; amplitudes en pourcentage par rapport à la valeurfinale de la sortie de 10V).
Le bloc RtIn permet de mesurer le signal analogique présent sur une entrée de la cartePC, reliée à la sortie du système à réguler. Attention : cette mesure s’effectue à unecadence d’échantillonnage que vous devez indiquer dans les propriétés du bloc (double clicsur le bloc). De plus, cette brique contient un bloqueur d’ordre 0. Les valeurs mesuréespar cette brique varient entre -1 et 1 (équivalent à -10V, +10V).
Le bloc Adapter permet de spécifier le type et la configuration de la carte PC utilisée.Il est obligatoire dans chaque schéma utilisant cette carte.
La plupart des blocs comportent un réglage de la période d’échantillonnage.Un exemple d’asservissement réel est donné sur la figure 4 et un exemple d’asservisse-
ment sur un procédé simulé est donné sur la figure 5.
A. Benzerrouk, T. Chateau 4 gp2

Polytech’ Clermont-Ferrand Tp6 gp2
Figure 3 – Sélection des briques utilisées pour concevoir les schémas d’assevissement.
ouvrir le menuSimulink
Lancer une Simulation
Stopper une simulation
Nouveau model
Figure 4 – Exemple d’asservissement d’un procédé réel et signification des principalescommandes.
A. Benzerrouk, T. Chateau 5 gp2
Polytech’ Clermont-Ferrand Tp6 gp2
Figure 5 – Exemple d’asservissement d’un procédé simulé
Figure 6 – Schéma d’un asservissement numérique d’un système continu et schéma équi-valent en discret
A. Benzerrouk, T. Chateau 6 gp2

CUST TP8
T. CHATEAU, J. BOM, N. KARAM GP2
TP7 : SYNTHESE DE SYSTEMES SEQUENTIELS
I - Description du TP
Le but de ce travail pratique est de comprendre la démarche pour formaliser et synthétiser des systèmes séquentiels. Pour valider le travail demandé, le system étudié sera simulé avec le logiciel CircuitMaker Student. Pré-requis vus en cours et TD : opérateurs logiques, Grafcet.
II - Présentation du logiciel CircuitMaker
Le logiciel CircuitMaker permet de représenter un circuit logique sous forme graphique puis de simuler son fonctionnement.
2.1 - Programmation du système étudié
La programmation du système séquentiel étudié sera réalisée en langage graphique. Dans ce mode, on crée le circuit logique avec des "composants" déjà modélisés en bibliothèques (portes logiques, bascules, composants TTL …).
Nouvelle fenêtre d'éditeur graphique : Au lancement le logiciel ouvre automatiquement le une fenêtre d’éditeur graphique, pour en ouvrir une autre faire : File puis New. Insertion d'objet dans une fenêtre graphique :
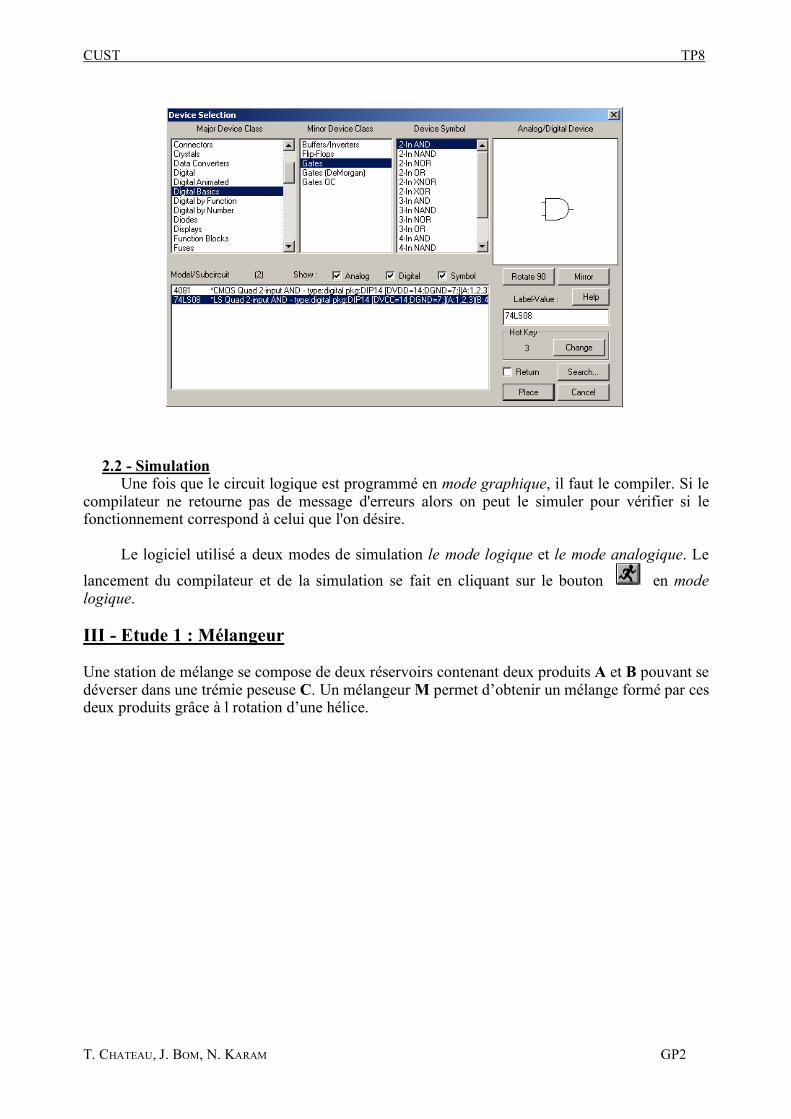
En cliquant sur le bouton de la barre d’outils, la fenêtre de sélection de composent apparaît (vous utiliserez principalement les librairies digital basics – flip-flops pour les bascules, gates pour les portes logiques, digital – power pour les interrupteurs et displays – digital pour les diodes logiques afin de visualiser l’état des sorties). Une fois le composant sélectionné, appuyez sur le bouton place pour l’insérer dans votre schéma.
CUST TP8
T. CHATEAU, J. BOM, N. KARAM GP2
2.2 - Simulation
Une fois que le circuit logique est programmé en mode graphique, il faut le compiler. Si le compilateur ne retourne pas de message d'erreurs alors on peut le simuler pour vérifier si le fonctionnement correspond à celui que l'on désire.
Le logiciel utilisé a deux modes de simulation le mode logique et le mode analogique. Le
lancement du compilateur et de la simulation se fait en cliquant sur le bouton en mode logique.
III - Etude 1 : Mélangeur Une station de mélange se compose de deux réservoirs contenant deux produits A et B pouvant se déverser dans une trémie peseuse C. Un mélangeur M permet d’obtenir un mélange formé par ces deux produits grâce à l rotation d’une hélice.

CUST TP8
T. CHATEAU, J. BOM, N. KARAM GP2
L’ordre de départ du cycle donné par l’opérateur ne peut être pris en compte que si les conditions initiales sont réalisées, c’est-à-dire si la trémie et le mélangeur sont vide. La quantité de produit A est d’abord pesée dans la trémie C et celle si est immédiatement vidangée dans le mélangeur M. Le produit B est ensuite pesé et mélangé au produit A présent dans le mélangeur. Ses deux produits sont malaxés pendant 20s. Temps au bout duquel le mélangeur est vidangé. Travail demandé :
- Représenter le GRAFCET de commande de cette machine. - Ecrire les équations d’activation et de désactivation des étapes. - Simuler le circuit de commande à l’aide de bascules SR. (Pour simplifier le circuit
remplacer la temporisation par un simple capteur)
IV - Etude 2 : Tri de caisses

CUST TP8
T. CHATEAU, J. BOM, N. KARAM GP2
Un dispositif automatique destiné à trier des caisses de deux tailles différentes se compose d’un tapis amenant les caisses, de trois poussoirs et de deux tapis d’évacuation.
Le poussoir P1 pousse les petites caisses devant les poussoir P2 qui à son tour les transfère sur le tapis 2, alors que les grandes caisses sont poussées devant les poussoir P3, ce dernier les évacuant sur le tapis 3.
Pour effectuer la sélection des caisses, un dispositif de détection placé devant le poussoir P1 permet de reconnaître sans ambiguïté le type de caisse qui se présente (a=1 si petite caisse, b=1 si grande caisse).
Travail demandé : - Représenter le GRAFCET de commande de cette machine. - Ecrire les équations d’activation et de désactivation des étapes. - Simuler le circuit de commande à l’aide de bascules SR.

CUST TP6
TP8 : SYNTHESE DE FONCTIONS LOGIQUES
I - Description du TP
Le but de ce travail pratique est de comprendre la démarche pour synthétiser une fonction logique avant son intégration dans un composant logique programmable de type FPGA. Pour valider le travail demandé, la fonction logique étudiée sera comparée à celle du composant commercialisé correspondant lors d'une phase de simulation. Pour cela, nous utiliserons le logiciel CircuitMaker Student.
Au cours de cette séance de TP, deux fonctions logiques vont être traitées : l'addition et la comparaison de 2 nombres binaires A et B sur n bits.
l'addition binaire sur n bits
la comparaison binaire sur n bits
Pré-requis vus en cours et TD : opérateurs logiques, théorème de De Morgan, forme canonique d'une fonction booléenne.
II - Présentation du logiciel CircuitMaker
A. Benzerrouk, T. Chateau GP2

CUST TP6
Le logiciel CircuitMaker permet de représenter un circuit logique sous forme graphique puis de simuler son fonctionnement.
2.1 - Programmation de la fonction logique étudiéeLa programmation de la fonction booléenne sera réalisée en langage graphique. Dans ce
mode, on crée le circuit logique avec des "composants" déjà modélisés en bibliothèques (portes logiques, composants TTL …).
Nouvelle fenêtre d'éditeur graphique : Au lancement le logiciel ouvre automatiquement le une fenêtre d’éditeur graphique, pour en ouvrir une autre faire : File puis New.
Insertion d'objet dans une fenêtre graphique :
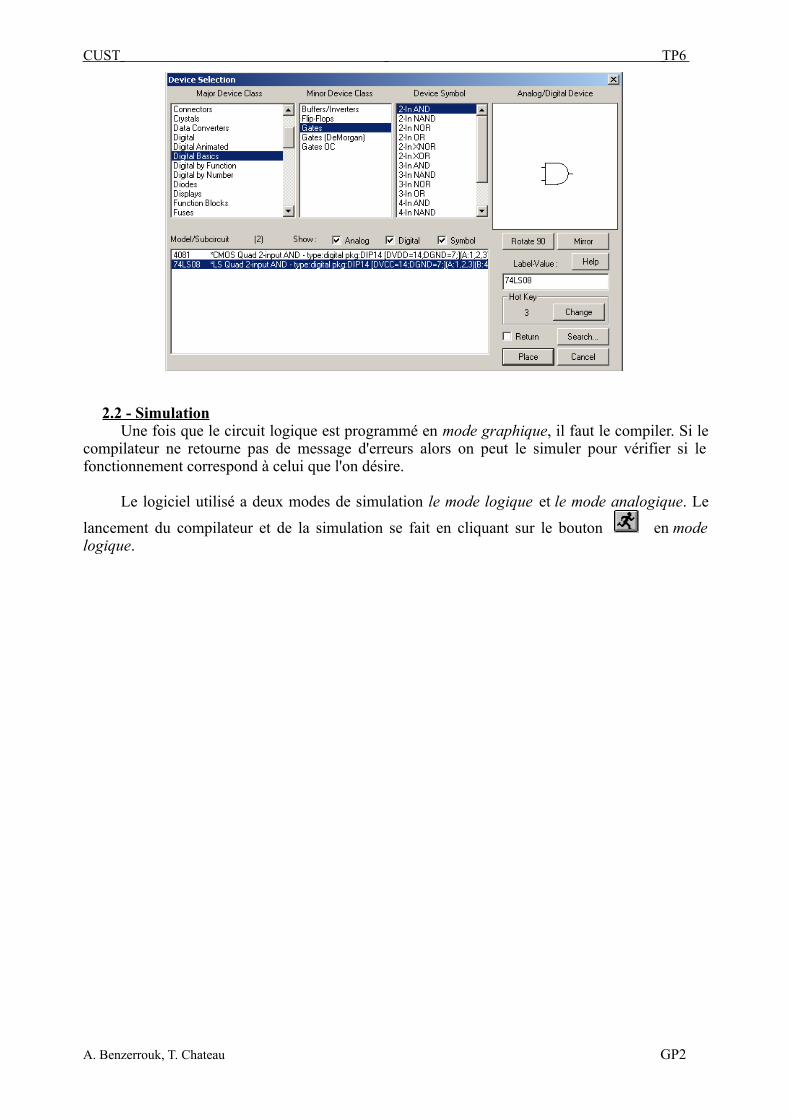
En cliquant sur le bouton de la barre d’outils, la fenêtre de sélection de composent apparaît (vous utiliserez principalement les librairies digital basics - gates pour les portes logiques, digital – power pour les interrupteurs et displays – digital pour les diodes logiques afin de visualiser l’état des sorties). Une fois le composant sélectionné, appuyez sur le bouton place pour l’insérer dans votre schéma.
A. Benzerrouk, T. Chateau GP2
CUST TP6
2.2 - SimulationUne fois que le circuit logique est programmé en mode graphique, il faut le compiler. Si le
compilateur ne retourne pas de message d'erreurs alors on peut le simuler pour vérifier si le fonctionnement correspond à celui que l'on désire.
Le logiciel utilisé a deux modes de simulation le mode logique et le mode analogique. Le
lancement du compilateur et de la simulation se fait en cliquant sur le bouton en mode logique.
A. Benzerrouk, T. Chateau GP2
CUST TP6
III - Etude 1 : Addition de deux nombres binaires A et B sur n bits
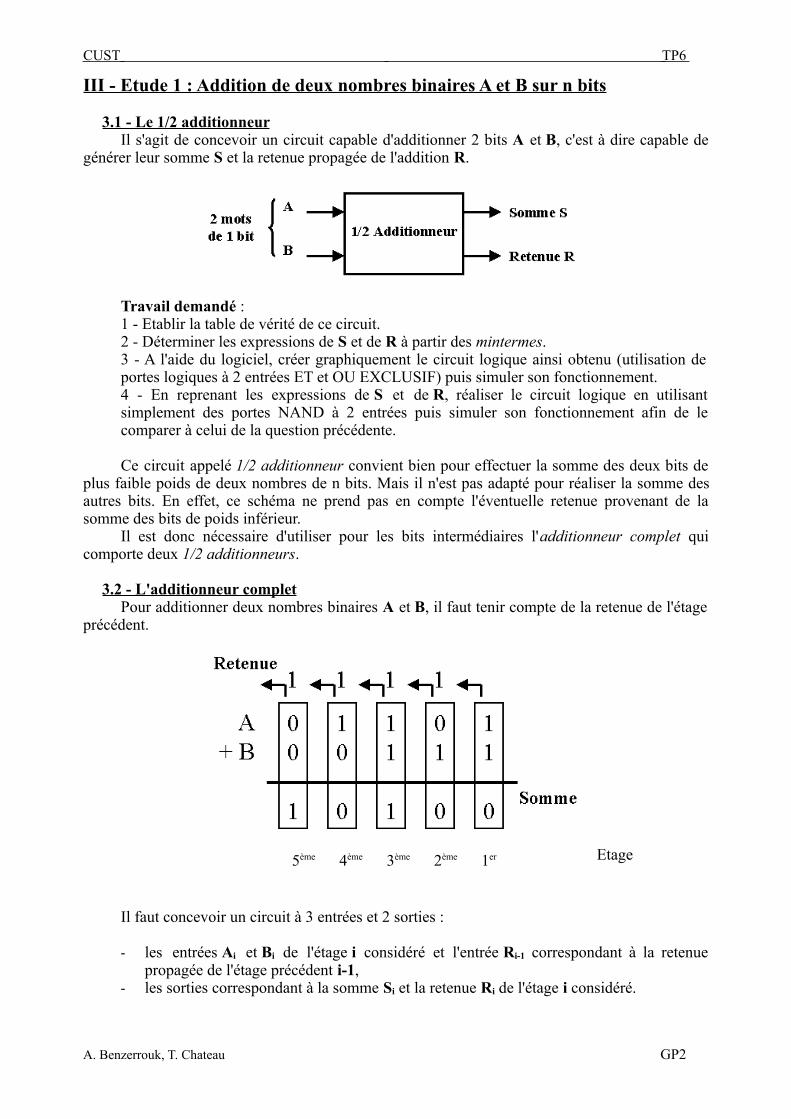
3.1 - Le 1/2 additionneurIl s'agit de concevoir un circuit capable d'additionner 2 bits A et B, c'est à dire capable de
générer leur somme S et la retenue propagée de l'addition R.
Travail demandé :1 - Etablir la table de vérité de ce circuit.2 - Déterminer les expressions de S et de R à partir des mintermes.3 - A l'aide du logiciel, créer graphiquement le circuit logique ainsi obtenu (utilisation de portes logiques à 2 entrées ET et OU EXCLUSIF) puis simuler son fonctionnement.4 - En reprenant les expressions de S et de R, réaliser le circuit logique en utilisant simplement des portes NAND à 2 entrées puis simuler son fonctionnement afin de le comparer à celui de la question précédente.
Ce circuit appelé 1/2 additionneur convient bien pour effectuer la somme des deux bits de plus faible poids de deux nombres de n bits. Mais il n'est pas adapté pour réaliser la somme des autres bits. En effet, ce schéma ne prend pas en compte l'éventuelle retenue provenant de la somme des bits de poids inférieur.
Il est donc nécessaire d'utiliser pour les bits intermédiaires l'additionneur complet qui comporte deux 1/2 additionneurs.
3.2 - L'additionneur completPour additionner deux nombres binaires A et B, il faut tenir compte de la retenue de l'étage
précédent.
5ème 4ème 3ème 2ème 1er Etage
Il faut concevoir un circuit à 3 entrées et 2 sorties :
- les entrées Ai et Bi de l'étage i considéré et l'entrée Ri-1 correspondant à la retenue propagée de l'étage précédent i-1,
- les sorties correspondant à la somme Si et la retenue Ri de l'étage i considéré.
A. Benzerrouk, T. Chateau GP2
CUST TP6
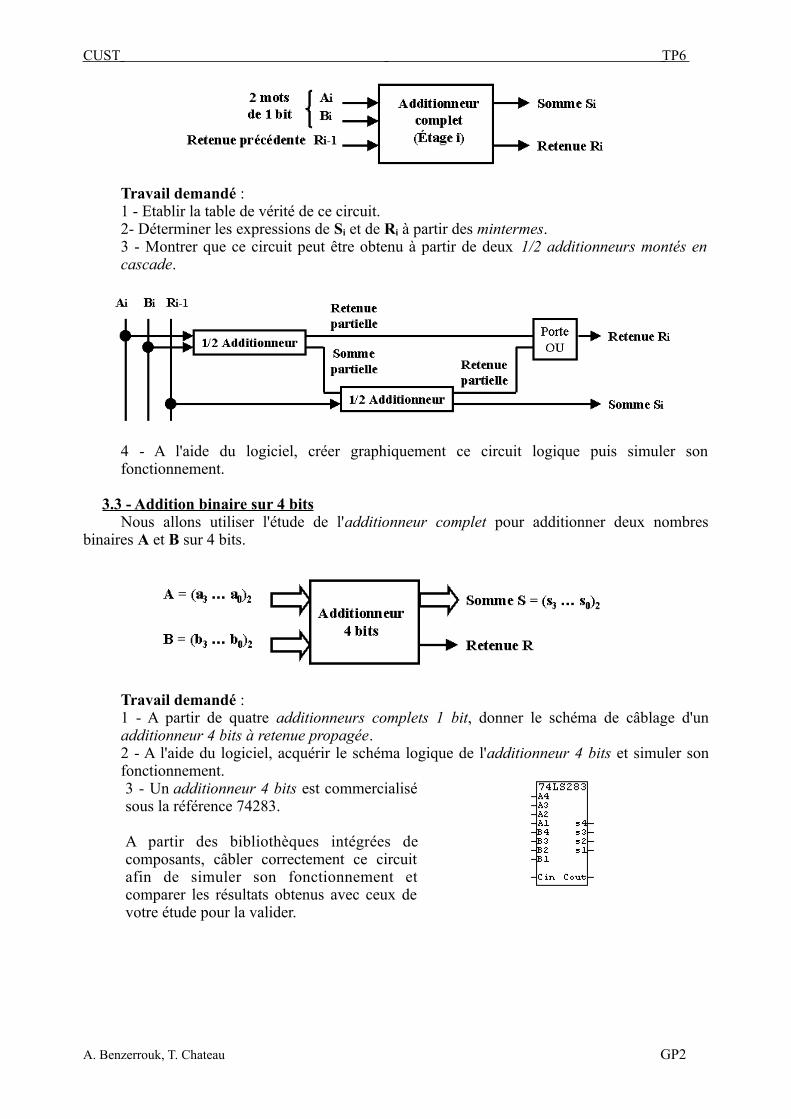
Travail demandé :1 - Etablir la table de vérité de ce circuit.2- Déterminer les expressions de Si et de Ri à partir des mintermes.3 - Montrer que ce circuit peut être obtenu à partir de deux 1/2 additionneurs montés en cascade.
4 - A l'aide du logiciel, créer graphiquement ce circuit logique puis simuler son fonctionnement.
3.3 - Addition binaire sur 4 bitsNous allons utiliser l'étude de l'additionneur complet pour additionner deux nombres
binaires A et B sur 4 bits.
Travail demandé :1 - A partir de quatre additionneurs complets 1 bit, donner le schéma de câblage d'un additionneur 4 bits à retenue propagée.2 - A l'aide du logiciel, acquérir le schéma logique de l'additionneur 4 bits et simuler son fonctionnement.3 - Un additionneur 4 bits est commercialisé sous la référence 74283.
A partir des bibliothèques intégrées de composants, câbler correctement ce circuit afin de simuler son fonctionnement et comparer les résultats obtenus avec ceux de votre étude pour la valider.
A. Benzerrouk, T. Chateau GP2

CUST TP6
IV - Etude 2 : Comparaison de deux nombres binaires A et B sur n bits
Il s'agit de concevoir un circuit capable de comparer deux nombres binaires A et B.
4.1 - Le comparateur élémentairePour étudier ce circuit, on considère A et B comme 2 informations binaires codées sur 1 bit.
Travail demandé :1 - Ecrire les fonctions e, s et i à partir de la table de vérité.
e = 1 si A = Bs = 1 si A > Bi = 1 si A < B
2 - Réaliser graphiquement le circuit logique du comparateur élémentaire et simuler son fonctionnement.
4.2 - Le comparateur n bitsa) A et B sont maintenant des nombres codés sur 4 bits
Travail demandé :1 - Etablir les fonctions de sortie E, S et I résultats de la comparaison de A avec B en utilisant les fonctions e3, e2, e1, e0, s3, s2, s1, s0, i3, i2, i1 et i0 issues des comparaisons élémentaires entre les bits correspondants.2 - A l'aide du logiciel, développer le câblage du comparateur 4 bits et simuler son fonctionnement.3 - Un comparateur 4 bits est proposé sous la référence commerciale 7485.
Câbler correctement ce circuit afin de simuler son fonctionnement et comparer les résultats obtenus avec ceux de votre étude pour la valider.
b) A et B sont maintenant des nombres codés sur 8 bits
A. Benzerrouk, T. Chateau GP2

CUST TP6
Travail demandé :1 - Proposer une solution pour comparer ces deux mots de 8 bits sachant que vous n'avez à votre disposition que des comparateurs 4 bits référence 7485.2 - Câbler votre solution et simuler son fonctionnement.
A. Benzerrouk, T. Chateau GP2

Polytech’ Clermont-Ferrand TP 9
TP9 : Programmation d’un automate par GRAFCET
Exercice 1
Soit le système représenté dans la figure 1, il comporte un chariot qui transporte du charbon du point Gauche G au point droit D. Le chariot sort du dépôt et avance à droite vers le point A où il est chargé en charbon, il se déplace ensuite vers le point B pour être déchargé et finit sa course dans le dépôt de droite.Le chariot sort du dépôt avec la commande de sortie chariot SC, le capteur fsc indique la fin de la sortie du chariot.Aux emplacements G et B sont positionnés des capteurs de proximité et de poids, ils indiquent la proximité du chariot avec les signaux cg et cd respectivement, et le poids avec les signaux cpg (pour chariot plein à gauche) et cvd (pour chariot vide à droite). Le chargement du chariot en G est fait avec la commande CG et le déchargement en D est fait avec la commande DCD.Le chariot finit sa course dans le dépôt à droite, l’arrivée du chariot au dépôt est signalée par le capteur rc (pour chariot rentré). Le déplacement du chariot se fait avec la commande DD (le circuit que prend le chariot est composé de 3 rails, pour chaque rail il faut appliquer une commande DD1 pour le rail n°1 DD2 pour le rail n°2 et DD3 pour le rail n°3 le déplacement du chariot nécessite alors l’application des 3 commandes en même temps) .Les boutons dcy et acy sont les boutons poussoirs de départ et d’arrêt de cycle.
Travail demandé :- Ecrire et simuler le GRAFCET de commande de cette machine : pour que le système
fasse un cycle de fonctionnement lorsque l’opérateur appuie sur le bouton dcy et s’arrête à la fin de cycle en attendant que l’opérateur ré appuie sur dcy.
A. Benzerrouk, T. Chateau
BA
rail n°1 rail n°2 rail n°3
G D

Exercice 2 :
Soit le même système de l’exercice 1. Cette fois, Le chariot doit transporter du charbon vers deux stations différentes (figure 2). Pour cela, un monte-chariot est utilisé pour atteindre la station 2. La demande de la station 2 en charbon est moins importante que celle de la station 1. Cependant, lorsque qu’elle signale sa demande, elle est satisfaite prioritairement.
Figure 2
La commande ma1 commande la marche et l’arrêt du chariot. La commande ma2 indique la demande de l’alimentation de la station 2 en charbon. Le chariot fonctionne de la manière suivante : lors de l’activation du bouton ma1, Le chariot doit sortir du dépôt avec la commande SC. La balance Bal1 détecte la présence du chariot C avec le signal pc1. Une fois le chariot en place, le chargement se fait à l’aide de la commande CG. La fin du chargement se fait quand le chariot est plein avec le signal cp1 de la balance Bal1. Le chariot continue alors son déplacement à droite sur le rail 1, ensuite sur le monte-chariot, et enfin sur le rail 2
A. Benzerrouk, T. Chateau
Station 1
Station 2

(le déplacement se fait alors par les 3 commandes DD1, DDMC et DD2 appliquées au même temps) jusqu’à ce que sa présence soit détectée par la balance Bal2 par le signal cp2 (chariot plein sur la balance 2). Le déchargement du chariot est effectué par la commande DCG1. La fin du déchargement est indiquée par le signal pc2 qui indique que le chariot est vide sur la balance 2. Le chariot se déplace alors à gauche (commandes DG2, DGMC, DG1) jusqu’au signal pc1 pour indiquer qu’il est à nouveau prêt au chargement. Le cycle est relancé tant que l’interrupteur ma1 est activé. Si la commande ma2 est activée, le chariot continue son cycle en cours, et le cycle prochain sera l’alimentation de la station 2. Le chariot est de nouveau chargé (CG) et se déplace ensuite sur le rail 1 et le monte chariot (commandes DD1, DDMC appliquées au même temps) jusqu’au front descendant du capteur cmc signalé par \cmc pour indiquer qu’il est sur le monte-chariot. La descente du monte-chariot est alors activée (commande COLD) jusqu’à l’arrivée en bas signalée par le signal bas. Le chariot se déplace alors à droite sur le monte-chariot et le rail 3 (commandes DDCM, DD3 appliquées simultanément) jusqu’à ce qu’il soit détecté par le signal cp3. Le déchargement est effectué avec la commande DCG2. La fin du déchargement est indiquée par le signal pc3. Le chariot se déplace alors à gauche sur le rail 3 et le monte -chariot (DG3, DGMC) jusqu’au signal cmcb qui indique que le chariot est sur le monte-chariot. Le monte-chariot remonte alors (commande COLM) jusqu’au signal haut qui indique que le monte-chariot est en haut. Le chariot se déplace à gauche sur le monte chariot et le rail 1 jusqu’au signal pc1. Le chariot continue d’alimenter la station 2 tant que ma2 est activée. Une fois ma2 désactivée, le chariot continue le cycle en cours et reprend l’alimentation de la station 1 tant que ma1 reste activée.Travail demandé :
- Ecrire et simuler le GRAFCET de commande de ce système et simuler son fonctionnement.
Exercice 3
Le système sur la figure ci-dessus est composé de 2 chariots C1 et C2 qui sont chargés en charbon en 2 points différents et qui le transportent vers un point de déchargement commun.On peut remarquer que le monte-chariot et le point de déchargement sont communs aux 2 chariots. Cette partie du circuit doit être alors être empruntée par un seul chariot à la fois.
A. Benzerrouk, T. Chateau

Les commandes ma1 et ma2 commandent la marche et l’arrêt des 2 chariots respectivement.Lors de l’activation du bouton ma1 (ma2 pour la chariot C2), le chariot C 1 doit sortir du dépôt avec la commande SC1 (SC2 pour le chariot C2). La balance Bal1 détecte la présence du chariot C1 avec le signal pc1 (La balance Bal2 détecte la présence du chariot C2 avec le signal pc2) une fois en place, le chargement du chariot se fait à l’aide de la commande CG1 (CG2 pour le chariot C2), la fin du chargement se fait quand le chariot est plein avec le signal cp1 de la balance Bal1 (cp2 de la balance Bal2 pour la chariot C2).Le chariot C1 se déplace alors à droite sur le rail 1 avec la commande DD1 jusqu'à b1 (Le chariot C2 se déplace à gauche sur le rail 2 avec la commande DG2 jusqu'à b2) et doit y attendre la libération de la partie commune. Une fois la partie commune libre, le chariot C1 avance encore à droite sur le rail 1 avec la commande DD1 et à droite sur le monte-chariot avec la commande DDMC jusqu’au front descendant du capteur cmc1 signalé par \cmc1 (déplacement à gauche sur le rail 2 DG2 et déplacement à gauche sur le monte-chariot DGMC jusqu’à \cmc2 pour le chariot C2).La descente du monte-chariot est alors activée avec la commande COLD jusqu'à l’arrivée en bas signalée par le signal bas. Le chariot se déplace à droite sur le monte-chariot (DDMC) et à droite sur le rail 3 (DD3) jusqu'à ce que sa présence signalée pcb soit détectée par la balance Bal3, le déchargement du chariot est effectué alors avec la commande DCG. La fin du chargement est détectée par le signal cvb qui indique que le chariot est vide, le chariot se déplace alors à gauche sur le rail 3 DG3 et à gauche sur le monte-chariot jusqu’au signal cmcb qui indique que le chariot est sur le monte-chariot.Le monte-chariot doit alors monter avec la commande COLM jusqu’au signal haut qui indique que le monte-chariot est en haut. Le chariot C1 doit alors se déplacer vers la gauche sur le monte-chariot DGMC et sur le rail 3 DG3 (déplacement à droite sur le monte-chariot DDMC et sur le rail 2 DD2 pour le chariot C2) jusqu’au signal pc1 qui indique la présence du chariot au point de chargement (pc2 pour le chariot C2). Le cycle de fonctionnement est relancé si le bouton ma1 est encore activé (ma2 pour le chariot C2). Travail demandé :
A. Benzerrouk, T. Chateau

- Ecrire le GRAFCET de commande du chariot C1 et simuler son fonctionnement.- Ecrire le GRAFCET de commande du chariot C2 et simuler son fonctionnement.- Ecrire le GRAFCET de synchronisation et modifier les GRAFCET des chariots C1 et
C2 pour que les 2 chariots fonctionnent simultanément en s’assurant qu’un seul chariot emprunte la zone commune a la fois.
A. Benzerrouk, T. Chateau