Embed Size (px)
Citation preview

Travaux Diriges de PhysiqueMecanique
L1 S2 Phys–103
Universite Paris–Sud 112010

2

Table des matieres
1 Cinematique - Changement de referentiel 51.1 Cinematique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Coordonnees cartesiennes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Coordonnees polaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1.3 Abscisse curviligne, rayon de courbure . . . . . . . . . . . . . . . . . . . . . . . 71.1.4 Coordonnees cylindriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.1.5 Coordonnees spheriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Changement de referentiels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Dynamique dans des referentiels galileen et non galileen 112.1 Dynamique dans un referentiel galileen . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Dynamique dans un referentiel non galileen . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 Energie 153.1 Travail-Circulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2 Theoreme de l’energie cinetique, Energie potentielle, stabilite . . . . . . . . . . . . . . . . 16
4 Moment cinetique 23
5 Mouvement a force centrale 275.1 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.2 Gravitation - Lois de Kepler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.3 Dynamique spatiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
6 Systeme a deux corps, centre de masse, collisions 336.1 Centre de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336.2 Collisions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7 Dynamique des solides indeformables 377.1 Distribution continue de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
7.1.1 Centre de masse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3

TD 0 Mecanique I Phys–103
7.1.2 Moment d’inertie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377.2 Dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4 Universite Paris–Sud 11

Phys–103 Mecanique I TD 1
TD 1
Cinematique - Changement de referentiel
1.1 Cinematique
1.1.1 Coordonnees cartesiennes
Exercice 1.1.1 (F) :
1. Un point mobile M peut se deplacer suivant une trajectoire rectiligne le long d’un axe Ox. On enre-gistre experimentalement son acceleration a en fonction du temps t et on obtient le resultat suivant :
0 < t < 2 s : a = −2 ms−2; 2 < t < 4 s : a = +2 ms−2
2. Le mobile part de l’origine sans vitesse initiale. Determiner l’expression v(t) de la vitesse v du mobileen fonction du temps t (on supposera que v(t) est une fonction continue du temps). Meme questionpour sa position x(t).
3. Tracer a(t), v(t) et x(t) sur des graphes en faisant correspondre l’axe des abscisses au temps t.Verifier leur coherence. Noter en particulier a quels instants la vitesse du mobile s’annule. Qu’enest-il du graphe x(t) a ces instants ?
4. Quelle est la vitesse moyenne entre 0 et 2 secondes ?
5. Quelle est la distance parcourue entre les instants t = 0 et t = 2 secondes ?
Exercice 1.1.2 (F) : Un point materielM se deplace le long d’une courbe dont les equations parametriquessont :
x(t) = Le−tτ
y(t) = R sin(ωt)
z(t) = R cos(ωt)
ou t represente le temps.
1. Donner la dimension des constantes L, R, τ et ω.
2. On appelle m, la projection de M sur le plan Oyz. Determiner la trajectoire du point m. En deduirel’allure de la trajectoire de M .
Universite Paris–Sud 11 5

TD 1 Mecanique I Phys–103
3. Calculer les composantes du vecteur vitesse ~v de M a la date t.
4. Calculer les composantes de l’acceleration ~a de M a la date t.
5. Determiner les normes de −→v et −→a a t = 0 si L = 3 m, R = 5 m, τ = 1 s et T ≡ 2πω
= 1 s ; tracer cesvecteurs au meme instant.
Exercice 1.1.3 (F) : Un mouvement plan est donne par ses equations horaires : x(t) = r cos(kt2) ety(t) = r sin(kt2), ou r et k sont des constantes positives.
1. Quelles sont les dimensions de r et k ?
2. Quelle est la trajectoire ? La dessiner.
3. Calculer les composantes et la norme de la vitesse. Le mouvement est-il uniforme ?
4. Calculer les composantes et la norme de l’acceleration.
1.1.2 Coordonnees polaires
Exercice 1.1.4 (F) : Un point mobile M , se deplace sur un cercle de centre O et de rayon R avec unevitesse dont la norme croıt lineairement avec le temps ‖−→v ‖ = kt ou k est une constante positive.
1. Donner l’expression du vecteur position−−→OM , dans la base locale associee aux coordonnees polaires.
2. Exprimer, dans la base locale associee aux coordonnees polaires, les composantes de la vitesse et del’acceleration du point M . On note M0 la position du point a t = 0. On choisira le systeme d’axesOx, Oy tel que M0 soit situe sur l’axe Ox.
3. Determiner les composantes de ces memes vecteurs en coordonnees cartesiennes.
4. Determiner la distance parcourue le long du cercle, du point M0 au point M(t) a l’instant t.
Exercice 1.1.5 (FF) : On considere la courbe definie par l’equation en coordonnees polaires :
ρ(θ) = r0(1 + cos θ)
ou r0 est est une constante positive. Un point materiel M decrit cette courbe de telle maniere que θ = ωt(ω = constante). On prendra θ ∈ [0, 2π[.
1. Tracer la courbe ainsi definie, apres avoir etudie les symetries et calcule ρ pour quelques valeurs de θcomprises entre 0 et π.
2. Calculer les composantes du vecteur vitesse de M dans la base (−→u ρ,−→u θ), ou ~uρ, ~uθ est la base
locale associee aux coordonnees polaires. Reporter qualitativement sur la courbe le vecteur vitesseaux points θ = 0, π
2, π, 3π
2.
3. Montrer que ‖−→v ‖ = ω(2ρr0)12 .
4. Calculer l’acceleration −→a et representer ce vecteur aux points θ = 0, π2,π,3π
2.
6 Universite Paris–Sud 11

Phys–103 Mecanique I TD 1
1.1.3 Abscisse curviligne, rayon de courbure
Exercice 1.1.6 (FF) : Dans un repere orthonorme Oxy, les coordonnees d’une particule sont donnees enfonction du temps t par :
x(t) = ct
y(t) = bt(t− τ)
ou c = 2 S.I, b = 4 S.I. et τ = 1 S.I.
1. Donner la dimension des constantes c et b.
2. Determiner l’equation de la trajectoire en coordonnees cartesiennes ; la tracer.
3. Ecrire l’element infinitesimal d’abscisse curviligne ds en fonction de t et dt. Donner ensuite sous laforme d’une integrale, la distance parcourue entre l’instant t = 0 et l’instant t = 2 s.
4. Calculer les composantes du vecteur vitesse −→v a la date t. Tracer −→v a t = 0 s et t = 0,5 s
5. Montrer que la particule possede une acceleration constante dont on calculera les composantes tan-gentielle aT et normale aN . En deduire le rayon de courbure de la trajectoire a t = 0,5 s.
Exercice 1.1.7 (FF) : Une particule se deplace dans un plan. Son acceleration est donnee au cours dutemps par l’expression −→a = α−→ut + βt4−→un ou −→ut et −→un sont des vecteurs unitaires du repere intrinseque liea la trajectoire orientee et α et β sont des constantes positives. On suppose qu’a l’instant t = 0 la particuleest au repos a l’origine des coordonnees.
1. Donner les dimensions de α et β.
2. Calculer l’abscisse curviligne s(t) en fonction du temps.
3. Determiner le rayon de courbureR(s) de la trajectoire en fonction de s. Verifier l’homogeneite de larelation.
4. En deduire l’allure de la trajectoire.
5. Calculer la norme de l’acceleration −→a en fonction de s. Verifier l’homogeneite des resultats.
1.1.4 Coordonnees cylindriques
Exercice 1.1.8 (FFF) : On considere l’helice d’equation en coordonnees cartesiennes x = R cos θ, y =R sin θ, z = hθ, parcourue par un point anime d’un mouvement uniforme de vitesse ~v. (R et h sont desconstantes).
1. Calculer les vecteurs ~v et ~a en coordonnees cylindriques, puis en coordonnees intrinseques.
2. Montrer que ~v fait un angle constant avec le plan Oxy, et que ~a est toujours dirigee vers l’axe Oz.
3. Calculer le rayon de courbure.
4. Calculer l’abscisse curviligne que parcourt le point pendant un tour, θ variant de 0 a 2π.
Universite Paris–Sud 11 7

TD 1 Mecanique I Phys–103
1.1.5 Coordonnees spheriques
Exercice 1.1.9 (F) : Un point sur la terre est repere par deux angles : la latitude λ et la longitude l.
1. Donner la definition des deux angles. On fera un schema.
2. Soient θ et φ les coordonnees spheriques d’un point a la surface de la terre. Exprimer θ et φ enfonction de λ et l. On choisira pour l’axe Oz, l’axe de la terre oriente du Sud vers le Nord, O etant lecentre de la terre. L’axe Ox sera choisi de la facon la plus simple possible.
3. La latitude et la longitude de Paris sont : λp = 4852 N et lp = 220′ E. Determiner les coordonneescartesiennes de Paris dans le repere Oxyz, sachant que le rayon de la Terre est : RT = 6400 km
4. En partant de Paris, on voyage a vitesse v constante, en maintenant une latitude constante. Determinerl’expression de φ(t) en fonction du temps t.
5. En partant de Paris, on se deplace a vitesse v constante, en maintenant une longitude constante.Determiner l’expression de θ(t) en fonction du temps t.
Exercice 1.1.10 (FF) : Soient M1 et M2 deux point distincts, a la surface de la terre. On note θ1, φ1
et θ2, φ2 les coordonnees spherique respectives des deux points M1 et M2. Le but de cet exercice est dedeterminer la longueur l, du chemin le plus court reliant les deux points M1 et M2 sur la surface de la terre.On notera Oz l’axe de la terre oriente du Sud vers le Nord, O etant le centre de la terre. On supposera quela terre est parfaitement spherique.
1. Donner l’expression des coordonnees cartesiennes des points M1 et M2 en fonctions de leurs coor-donnees spheriques.
2. Soitψ l’angle entre les vecteurs−−−→OM1 et
−−−→OM2. Exprimer cosψ en fonctions des coordonnees spherique
des points M1 et M2.
3. En deduire l’expression de l en fonction des coordonnees spheriques des points M1 et M2 et du rayonde la terre RT.
4. Les latitude et longitude de Paris sont : 4852 N et 220′ E. Celles de New York sont : 4040 Net 7400′ W. En deduire la distance l, la plus courte sur la terre entre ces deux villes. On donneRT = 6400 km.
1.2 Changement de referentiels
Exercice 1.2.1 (F) : Des flocons de neige tombent verticalement par rapport au sol, en parcourant 8 m parseconde. A quelle vitesse les passagers d’une voiture, roulant a 50 km.h−1 sur une route droite, les voient-ilsfrapper le pare-brise du vehicule ?
Exercice 1.2.2 (FF) : Un enfant lache une bille dans la cage de l’escalier de son immeuble depuis le 4emeetage, a l’instant ou l’ascenseur y passe. Son pere, qui monte par l’ascenseur jusqu’au 10eme etage avec unevitesse constante, observe aussi la chute de la bille. Les grandeurs physiques suivantes sont-elles identiquespour l’enfant et pour son pere :
8 Universite Paris–Sud 11

Phys–103 Mecanique I TD 1
1. la vitesse de la bille a un instant donne ?
2. le temps de chute total ?
3. l’acceleration de la bille a un instant quelconque ?
4. la distance totale parcourue par la bille ?
Exercice 1.2.3 (FF) : Un avion s’envole de Brest vers Bale. Sa vitesse, constante par rapport a l’air, estegale a 360 km.h−1 et le vent souffle du Nord-Ouest a 60 km.h−1. On admettra que Brest est a l’Ouest deBale a environ 1000 km.
1. Quel doit etre le cap suivi par le pilote ?
2. Quelle est la duree du voyage ?
3. Reprendre les question 1 et 2 pour le voyage de retour.
Exercice 1.2.4 (FF) Le manege : Un manege d’enfant tourne avec une vitesse angulaire ω constante.Le proprietaire doit, pour ramasser les tickets, parcourir la plate-forme en rotation. On considere R′, lereferentiel lie au manege, muni du repere O′x′y′, et de la base orthonormee correspondante (~i′,~j′), dontl’origine O′ coıncide avec le centre du manege. On notera R le referentiel lie a la terre, muni du repereOxy, ou O = O′, avec la base orthonormee associee (~i,~j).
1. Partant du centre, le proprietaire suit un rayon de la plate-forme avec une vitesse constante ~v′ parrapport au manege.
(a) Etablir les equations du mouvement du proprietaire x′(t), y′(t), dans le referentiel R′ (mouve-ment vu par les enfants). On choisira l’axe O′x′ de telle sorte que la vitesse du proprietaire soitparallele a cet axe : ~v′ = v′~i′
(b) Determiner les composantes des vecteurs (~i′,~j′) sur la base (~i,~j). On supposera, qu’a l’instantinitial, les deux reperes O′x′y′ et Oxy sont confondus.
(c) En deduire les equations du mouvement du proprietaire en coordonnees cartesiennes x(t) et y(t),puis en coordonnees polaires ρ(t), θ(t), dans le referentiel R (vu par les parents). On donneral’equation de la trajectoire ρ(θ) dans le referentiel R.
(d) Determiner la vitesse ~v du proprietaire dans le referentiel R, a partir des equations de son mou-vement.
(e) Retrouver l’expression de la vitesse ~v, en utilisant les lois de composition des mouvements.
(f) Determiner l’acceleration ~a du proprietaire, mesuree dans le referentiel R, a partir de l’expres-sion de ~v.
(g) Retrouver l’expression de l’acceleration ~a en utilisant la composition des accelerations.
2. Le proprietaire parcourt maintenant la plate-forme en suivant un arc de cercle de rayon r0, concen-trique a la plate-forme, donc sa vitesse lineaire, par rapport au manege, r0ω
′ est constante. Reprendrel’ensemble des questions precedentes. Que se passe-t-il en particulier si ω′ = −ω ?
Universite Paris–Sud 11 9

TD 1 Mecanique I Phys–103
10 Universite Paris–Sud 11

Phys–103 Mecanique I TD 2
TD 2
Dynamique dans des referentiels galileen et nongalileen
2.1 Dynamique dans un referentiel galileen
Exercice 2.1.1 (F) : Les affirmations suivantes sont-elles vraies ?1. Un corps ne peut se deplacer sans qu’une force agisse sur lui ;2. Toute variation de vitesse d’un corps exige l’action d’une force ;3. Si l’energie cinetique d’un corps est constante, aucune force ne s’exerce sur lui ;4. Si la force exercee sur un corps devient et reste nulle, le corps s’arrete.
Exercice 2.1.2 (F) Pendule dans un referentiel galileen : Un pendule simple est constitue d’un fil in-extensible de longueur l constante (fil toujours tendu), de masse negligeable, dont l’une des extremites estfixee en O a un support fixe et dont l’autre extremite est liee a une bille de masse m, consideree commeponctuelle. Soit Oz l’axe vertical descendant passant par O, de vecteur unitaire ~k. Le referentiel lie auxaxes Ox,Oy,Oz est considere comme galileen.
1. Determiner la position d’equilibre M0 de la bille dans le champ gravitationnel terrestre supposeconstant, de norme g, et donner l’expression correspondante de la norme N0 = ‖
−→N0‖ de la tension du
fil (force que le fil tendu exerce sur la bille a l’equilibre).2. On ecarte la bille de sa position d’equilibre d’un angle θ0, fil toujours tendu, dans un plan vertical
contenant l’axeOz. A un instant t0, pris comme instant initial, on lache la bille sans vitesse initiale. Onadmet que le mouvement de la bille s’effectue dans le plan ainsi defini et on neglige tout frottement.A l’instant t, on repere la position de la bille par ses coordonnees polaires l et θ dans le plan dumouvement ou θ(t) = (Oz,OM). On notera ~ul et ~uθ les vecteurs unitaires de la base locale descoordonnees polaires.
(a) Faire le bilan des forces appliquees a la bille a l’instant t.(b) Appliquer le principe fondamental de la dynamique a la bille et obtenir les expressions des
composantes radiale et orthoradiale de l’acceleration de la bille.(c) Obtenir l’equation differentielle qui regit le mouvement du pendule. On se placera dans le cas
ou θ0 est petit. En deduire la pulsation ω et la periode T des oscillations de la bille.
Universite Paris–Sud 11 11

TD 2 Mecanique I Phys–103
(d) Lorsque θ = 0 (le pendule passe par sa position d’equilibre), exprimer la tension du fil ~N enfonction de θ. Montrer que ‖
−→N ‖ est maximale en ce point.
Exercice 2.1.3 (F) Balistique :
1. Sans frottement : A l’instant t = 0, on lance du point O, avec une vitesse initiale ~v0, un projectileponctuel M de masse m ; ~v0 fait un angle α0 avec le plan horizontal et la projection de ~v0 sur ce planest portee par Ox. On suppose que l’acceleration de la pesanteur est independante de l’altitude z. Onsuppose que le mouvement est un mouvement de chute libre dans le vide.
(a) Calculer la vitesse du projectile a l’instant t.
(b) Quelles sont les equations horaires du mouvement x(t), y(t) et z(t). Commentaires.
(c) Quelle est l’equation de la trajectoire ? Pour quelle valeur de α0 la portee est-elle maximum ?
2. Avec frottement : On reprend le probleme precedent en supposant que le projectile est soumis a uneforce de freinage proportionnelle a sa vitesse ~f = −k~v (k etant une constante positive).
(a) Etablir les equations differentielles du mouvement.
(b) En deduire la vitesse a l’instant t. Que se passe-t-il quand t tend vers l’infini ?
(c) Quelles sont les equations horaires du mouvement x(t), y(t) et z(t) ? Montrer que lorsque t tendvers l’infini, la trajectoire admet une asymptote. Donner l’allure de cette trajectoire.
(d) Montrer que si le coefficient de frottement k est suffisamment faible, on retrouve les equationsde la chute libre dans le vide (faire un developpement limite a l’aide de la formule de Taylor).
Exercice 2.1.4 (FF) Charge dans un champ magnetique : Dans un referentiel galileen, muni d’unrepere (O,~ı,~,~k), On considere le mouvement d’une particule de charge q (q > 0) placee dans un champmagnetique uniforme ~B = B~k. Au temps t = 0, la particule se trouve a l’origine O et possede une vitesseinitiale ~v0 contenue dans le plan xOz et faisant un angle α avec ~k. On neglige l’action de la pesanteur, et onpose ω = q‖
−→B‖m
(frequence angulaire cyclotron). On rappelle que la force de Lorentz est donnee par :
~F = q~v ∧ ~B.
1. Ecrire l’equation differentielle a laquelle obeit le mouvement de la particule.
2. Determiner les equations parametriques de la trajectoire en coordonnees cartesiennes : x(t), y(t) etz(t).
3. En deduire la nature du mouvement de la particule dans le plan xOy et sur l’axe Oz.
4. On se place dans le cas ou α = π/2. Que devient le mouvement de la particule ? Etudier en parti-culier l’intersection de la trajectoire avec l’axe Oy. Pourrait-on selectionner des particules de vitessedonnee ?
5. La particule se deplacant dans le plan xOy est soumise a un champ electrique ~E = E0~i, en plus du
champ magnetique. Resoudre les equations du mouvement.
12 Universite Paris–Sud 11

Phys–103 Mecanique I TD 2
2.2 Dynamique dans un referentiel non galileen
Exercice 2.2.1 (F) : Une personne se tient sur un pese-personne situe dans un ascenseur. L’ascenseur etanta l’arret, le pese-personne indique 70 kg. L’ascenseur monte en decrivant trois phases :
phase 1 : Une phase d’acceleration constante de 2,0 ms−2.phase 2 : Une phase d’acceleration nulle.phase 3 : Une phase de deceleration constante de 2,0 ms−2.
1. Quelle indication fournit le pese-personne durant chacune des phases du mouvement de l’ascenseur ?On prendra g = 9,8 ms−2.
2. Apres l’arret, le cable casse et l’ascenseur tombe en chute libre. Qu’indique alors le pese-personne ?
Exercice 2.2.2 (FF) Pendule dans un referentiel non galileen : Le pendule decrit dans l’exercice 2.1.2est suspendu en O au plafond d’un vehicule se deplacant avec un mouvement de translation horizontaleuniformement accelere, d’acceleration ~at, par rapport au referentiel terrestre suppose galileen.
1. Soit M ′0 la position de la masse m a l’equilibre definissant l’axe Oz′. Determiner cette position
d’equilibre par l’angle non oriente entre les axes Oz et Oz′.
2. A l’instant t = 0, on ecarte la masse m de sa position d’equilibre dans le plan vertical contenant Ozet Oz′, du meme angle θ0 qu’au 2.1.2.2 et on la lache sans vitesse initiale. En prenant, dans le plandu mouvement, l’axe Oz′ comme axe polaire et pour θ′ l’angle (Oz′, OM ′(t)), obtenir les equationsdifferentielles en θ′ du mouvement de la masse m. Dans le cas des petits angles, quelle est la periodeT ′ des oscillations ?
Exercice 2.2.3 (F) Coriolis et le lavabo : vous avez peut etre entendu cette affirmation : “Le sens derotation de l’eau qui s’ecoule d’un lavabo n’est pas le meme dans l’hemisphere Sud et dans l’hemisphereNord, c’est l’effet Coriolis !”.
1. La vitesse d’ecoulement de l’eau etant de l’ordre de 0,1 m/s, donner un ordre de grandeur de l’intensitede l’acceleration de Coriolis.
2. En deduire un ordre de grandeur de la vitesse engendree par l’acceleration de Coriolis apres uneseconde d’ecoulement.
3. Pensez vous que l’acceleration de Coriolis peut determiner le sens de rotation de l’ecoulement ?
Exercice 2.2.4 (FF) Le manege : Un manege d’enfant tourne avec une vitesse angulaire ω constante. Leproprietaire (de masse m) doit, pour ramasser les tickets, parcourir la plate-forme en rotation. On considereR′, le referentiel lie au manege, muni du repere O′x′y′, et de la base orthonormee correspondante (~i′,~j′),dont l’origine O′ coıncide avec le centre du manege. On notera R le referentiel lie a la terre, muni du repereOxy, ou O = O′, avec la base orthonormee associee (~i,~j). On suppose que le referentiel R est galileen.
1. Partant du centre, le proprietaire suit un rayon de la plate-forme avec une vitesse constante ~v′ parrapport au manege.
Universite Paris–Sud 11 13

TD 2 Mecanique I Phys–103
(a) Determiner le vecteur vitesse angulaire ~ω qui decrit le mouvement du referentiel R′ par rapportau referentiel R.
(b) En raisonnant dans le referentiel R′, donner les expressions des forces d’inertie qui s’appliquentsur le proprietaire du manege.
(c) Quelle est la force ~F que doit exercer le proprietaire pour maintenir sa trajectoire. On determinerales valeurs numeriques des composantes de ~F aux instants ou le proprietaire est a une distancer = 5 m du centre du manege.
(d) A.N : ω = 10 tours/min, m = 70 kg, ‖−→v′ ‖ = 2 km/h.
2. Le proprietaire parcourt maintenant la plate-forme en suivant un arc de cercle de rayon r0, concen-trique a la plate-forme, donc sa vitesse lineaire, par rapport au manege, r0ω
′ est constante. Reprendrel’ensemble des questions precedentes. On decrira la trajectoire du proprietaire dans le referentiel R′
par ses coordonnees polaires.
3. A.N : ω′ = 2 tours/min, r0 = 3 m.
Exercice 2.2.5 (FFF) Balistique et rotation de la Terre : Un projectile, assimile a un point materiel,est lance a la latitude λ = 45˚ dans un plan meridien avec une vitesse initiale v0 = 800 m.s−1 dirigee duNord vers le Sud et faisant un angle α = 6 avec le plan horizontal. On neglige les forces de frottement.
1. On suppose que la Terre est un referentiel galileen. Calculer :
(a) La duree du trajet.
(b) La portee du tir. En deduire la variation de latitude du projectile entre le point de tir et le pointd’impact.
(c) La hauteur maximale atteinte par le projectile.
2. On tient compte de la rotation de la Terre.
(a) Quelle est l’influence de la force centrifuge sur la position du point de chute ? Determiner laduree de la trajectoire et la portee du tir.
(b) Quelle est l’influence de la force de Coriolis sur la position du point de chute ? On procederapar approximations successives en supposant que, pour calculer la force de Coriolis, on peutremplacer la vitesse du projectile par son expression approchee.
14 Universite Paris–Sud 11

Phys–103 Mecanique I TD 3
TD 3
Energie
3.1 Travail-Circulation
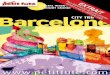
Exercice 3.1.1 (FF) Circulation : On considere un point materiel de masse m soumis a une force ~F (M).On note (~i,~j,~k) la base orthonormee d’un repere cartesien OXY Z et (~uρ,~uθ) la base orthonormee localeassociee aux coordonnees polaire dans le plan OXY . Pour chacune des forces suivantes, calculer la circu-lation (ou travail) de ~F (M) le long des trajectoires proposees :
(c)(b)(a)
x
y A
OR
3 21
CB
O AO
B
A
R
FIG. 3.1 – Chemins pour le calcul des circulations.
1. ~F (M) =-K~uρ ou K est une constante.On reliera les points A(0, R, 0) et B(0,−R, 0) situes sur la sphere d’equation x2 + y2 + z2 = R2 viaun grand cercle ou la ligne droite joignant les deux points (voir figure 3.1(a)).
2. ~F (M) = ρ cos θ ~uρ + ρ sin θ ~uθ.
On considerera les chemins suivants reliant les points A(R,0) et C(R,π
4) en coordonnees polaires
places sur un cercle de centre O et de rayon R : AC (le long de l’arc de cercle), AOC (sur les segmentsde droite reliant ces points) et AOBC (sur AOB selon les segments de droite reliant ces points et surBC le long du cercle, B(R,
π
2)) (voir figure 3.1(b)).
3. Les vecteurs ~F1(M) = 3x2y~i+ (x3 + xy2)~j , ~F (M) = 3x2y~i+ (x3 − y3)~j et ~F2(M) = ~F1 − ~F .On calculera la circulation le long des trajectoires suivantes reliant l’origine O au point A (1,1,0) :la ligne droite d’equation y = x et un deplacement selon la parabole d’equation y = x2 (voir fi-gure 3.1(c)).
Universite Paris–Sud 11 15

TD 3 Mecanique I Phys–103
Exercice 3.1.2 (F) :
1. Quel travail doit-on fournir pour, elever une masse M d’une meme hauteur h, soit verticalement, soiten tirant sans frottement sur un plan incline d’un angle α avec l’horizontale ?
2. Quel est le travail du poids pendant ce mouvement ? Est-il positif ou negatif ?
3. On suppose que la masse se deplace a vitesse constante v. Quelle puissance doit-on developper poureffectuer ce travail ?
4. Comment le travail a fournir serait-il modifie s’il existait des forces de frottement sur l’air ou sur leplan incline ?
3.2 Theoreme de l’energie cinetique, Energie potentielle, stabilite
Exercice 3.2.1 (F) Traıneau : On lache un traıneau au sommet C d’une pente inclinee, faisant un angleβ avec l’horizontale. La piste etant enneigee et le sol durci par le gel, la reaction du plan incline comporteune composante normale ~R et une force de frottement ~f parallele au plan incline.
1. Statique :On suppose que le frottement est suffisant pour que le traineau reste immobile sur la pente inlinee.On rappelle que le coefficient de frottement statique ks est defini par :
ks =‖−−→fmax‖‖−→R‖
(3.1)
ou ‖−−→fmax‖ est la norme maximale de la force de frottement ~f que le contact peut fournir tout en
maintenant le traineau immobile.
(a) Exprimer les normes de ~f et de ~R en fontion de m, β et l’acceleration de la pesanteur g.
(b) En deduire une relation entre le coefficient de frottement statique ks et l’angle β pour que letraineau se mette en mouvement.
(c) A.N. : verifier que cette relation est bien staisfaite avec ks = 0.1 (frottement metal sur glace) etβ = 60.
2. Dynamique :Le traıneau est maintenant en mouvement, on note ~f ′ la force de frottement dynamique. Il termineen D son mouvement sur la piste inclinee puis se deplace sur une piste horizontale, de meme natureque la piste CD, jusqu’a son arret au point E. On note ` = CD et `′ = DE et kd le coefficient defrottement dynamique.
(a) Calculer le travail WCD de la resultante des forces appliquees au traineau sur le trajet inclineCD. On exprimera WCD en fonction de kd, `, β, m et g.
(b) Calculer le travail WDE de la resultante des forces appliquees au traineau sur le trajet horizontalDE. On exprimera WDE en fonction de kd, `′, β, m et g.
(c) En appliquant le theoreme de l’energie cinetique, exprimer kd en fontion du rapport r = `′
`et de
β.
16 Universite Paris–Sud 11

Phys–103 Mecanique I TD 3
(d) A.N : calculer `′ sachant que ` = 5 m, kd = 0.05 et β = 60.
Exercice 3.2.2 (FF) Rotation d’un pendule : Un pendule est constitue d’une masse ponctuelle m sus-pendue a l’extremite d’une tige rigide de longueur l et de masse supposee negligeable. L’autre extremite dela tige est fixee au point C. La tige peut tourner dans le plan xOz autour du point C. Le repere cartesienxOz, ou l’axe Oz est vertical dirige vers le haut, est muni de la base orthonormee (~i,~k). L’origine O dusysteme de coordonnee coıncide avec la position la plus basse de la masse m. Au cours de son mouvement,la position de la massem est reperee par l’angle θ que fait la tige avec la verticale (voir figure 3.2) . Le but de
C
O
M
z
x
uρ
uθθ
l
FIG. 3.2 – Le pendule
cet exercice est de determiner la vitesse minimale qu’il faut donner a la masse m, initialement a l’equilibre,pour que son mouvement soit un mouvement de rotation et non pas un mouvement d’oscillation.
1. Faire le bilan des forces qui s’exercent sur la masse m. On precisera quelles sont les forces quitravaillent au cours du mouvement du pendule.
2. Donner l’expression de l’energie potentielle Ep de la masse m en fonction de sa hauteur z, puis enfonction de l’angle θ. On prendra l’origine de l’energie potentielle en O.
3. Tracer le graphe representant l’energie potentielle Ep(θ) en fonction de θ, pour θ ∈ [−π, π]. Onprecisera la position des maxima et des minima de la courbe representative de Ep(θ). En deduire lespositions d’equilibre stable et instable.
4. Le pendule est initialement immobile a sa position d’equilibre stable. En utilisant le graphe de Ep(θ)precedent, determiner l’energie minimale E0 qu’il faut fournir a la massem pour que son mouvementsoit un mouvement de rotation et non pas un mouvement d’oscillation.
5. En deduire la vitesse initiale minimale v0 qu’il faut donner a la masse m pour que son mouvementsoit un mouvement de rotation et non pas un mouvement d’oscillation. On donne l = 40 cm et onprendra pour l’acceleration de la pesanteur g = 10 m s−2.
Exercice 3.2.3 (FFF) : On s’interesse a la dynamique d’une particule se deplacant sur un axe xx′ etsoumise au potentiel V (x) represente sur la figure 3.3. On veut etudier qualitativement le mouvement dela particule pour differentes valeurs de son energie mecanique Em. Pour chacun des cas ci-dessous, decrirequalitativement le mouvement, puis tracer l’allure de x(t) et x(t) :
Universite Paris–Sud 11 17

TD 3 Mecanique I Phys–103
1x2
x 3
Vb
Vmin
x
V
V(x)
x
FIG. 3.3 – Energie potentielle.
1. Lorsque Em < 0, avec les conditions initiales : x(0) = x1 et x(0) > 0.(a) Exprimer la periode du mouvement comme une integrale d’une fonction du potentiel.
(b) On suppose de plus que Em = Vmin + ∆E, ou ∆E est assez petit pour qu’on puisse approcherV (x) par son developpement limite autour de x = x1. En deduire la periode du mouvementen fonction de d2V (x)
dx2
∣∣∣x=x1
. Pour cela on pourra utiliser le resultat de la question precedente, ou
resoudre l’equation differentielle donnant x(t).2. Dans les cas suivants, decrire le comportement de x(t) et de x(t) pour t→∞.
(a) Lorsque 0 < Em < Vb, avec les conditions initiales x(0) = x3 et x(0) < 0.
(b) Lorsque Em = 0, avec les conditions initiales x(0) = x1 et x(0) < 0.
(c) Lorsque Em > Vb, avec les conditions initiales x(0) = x3 et x(0) < 0.
Exercice 3.2.4 (FF) Oscillateurs couples : Deux billes de meme masse m sont reliees par un ressort deraideur k. Chacune des billes est aussi reliee a un autre ressort de raideur k′, l’autre extremite de ces ressortsetant fixe. On suppose qu’a l’equilibre, les ressorts ne sont ni comprimes ni etendus. On supposera que lesbilles peuvent etre considerees comme ponctuelles et qu’elles ne peuvent se deplacer que sur l’axe Ox (voirfigure 3.4). On notera x1 et x2 les positions respectives des masses m1 et m2 par rapport a leurs positionsd’equilibre (i.e. a l’equilibre x1 = x2 = 0).
FIG. 3.4 – Oscillateurs couples
1. Ecrire l’energie potentielle V(x1,x2) du systeme forme des deux oscillateurs couples, en fonction despositions x1 et x2 de chacune des billes des raideurs des ressort.
2. Determiner l’expression des forces qui s’appliquent sur chacune des masses a partir de l’expressionde V (x1, x2).
18 Universite Paris–Sud 11

Phys–103 Mecanique I TD 3
3. On note X = x1+x2
2et x = x2 − x1. Determiner l’expression de l’energie mecanique du systeme en
fonction de ces nouvelles variables X et x. En deduire que le systeme des deux oscillateurs couplespeut en fait etre considere comme deux oscillateurs “fictifs” independant. On donnera les frequencesrespectives ω et Ω des deux oscillateur “fictifs”.
4. En deduire, l’expression generale de x1(t) et x2(t) en fonction du temps t et des frequences ω et Ω.
5. A t = 0, on lache les deux billes a partir des positions x1 = `1 et x2 = `2, sans vitesse initiale.Donner l’expression des positions x1(t) et x2(t) des billes en fonction du temp, des frequences ω, Ωet des positions initiales `1, `2. Decrire qualitativement le mouvement des oscillateurs dans les deuxcas particuliers ou `1 = `2 et `1 = −`2.
6. A quelle condition la dynamique du systeme est elle periodique, pour toutes conditions initiales ?
Exercice 3.2.5 (FF) Pendule et ressort : On considere une masse ponctuelle m accrochee a l’extremited’un pendule de longueur L dont le point de suspension est fixe en C. La masse m est de plus accrochee aun ressort de raideur k, dont l’autre extremite est fixee au pointA. A l’equilibre le ressort est horizontal et lamasse m est situee en O, a la verticale du point de suspension C du pendule (voir figure 3.5). On supposeraque le mouvement du pendule a lieu dans un plan.
O
L
A
C
M
FIG. 3.5 – Pendule et ressort.
1. Calculer l’energie potentielle du pendule suppose seul en fonction de l’angle θ, reperant sa positionpar rapport a la verticale. On prendra l’origine de l’energie potentielle a l’equilibre.
2. Calculer l’energie potentielle du ressort suppose seul lorsqu’on ecarte le pendule de l’angle θ.
3. Sachant que l’energie potentielle totale est la somme des deux termes calcules precedemment, endeduire son expression dans l’approximation des petits angles (on effectuera un developpement limitede l’energie potentielle au deuxieme ordre en θ ).
4. Calculer l’energie cinetique du pendule en fonction de θ. En deduire une expression de l’energietotale du systeme dans l’approximation des petits angles.
5. En deduire l’equation differentielle du mouvement verifiee par θ. Determiner la pulsation ω du mou-vement de la masse m, dans l’approximation des petits angles.
Universite Paris–Sud 11 19

TD 3 Mecanique I Phys–103
6. Application numerique : on donne k = 100 N.m−1, m = 1 kg, L = 10 cm, g = 10 m.s−2. Calculerla frequence des oscillations. On suppose que le pendule a ete lache sans vitesse initiale pour unevaleur θ0 = 1o, estimer l’energie totale du systeme sachant que (1,8)2 = 3,24 et π2 ≈ 10. Calculerl’incertitude absolue sur l’energie totale sachant que k et L sont connus avec une precision de 1% (lesautres quantites sont connues avec precision).
Exercice 3.2.6 (F) Vitesse de liberation : Un projectile est lance du sol d’un corps celeste, supposespherique et homogene, avec une vitesse ~v0 dirigee verticalement vers le haut. On negligera les frottementsde l’eventuelle atmosphere du corps celeste, de masse Mp et de rayon Rp .
1. Exprimer la norme v de la vitesse du projectile lorsqu’il est a la distance r du centre du corps celeste,en fonction de la constante de gravitation universelle G, de r, v0, Mp et Rp .
2. En deduire que le projectile ne peut s’eloigner indefiniment de la planete (et echapper a son attrac-tion gravitationnelle) que si la vitesse initiale v0 depasse une valeur minimale vl appelee vitesse de
liberation. Exprimer vl en fonction de g0 =GMp
R2p
. Interpretation graphique.
3. Application numerique :– Pour la Terre : M = 6.1024 kg, R = 6400 km.– Pour la Lune dont le rayon et la masse sont respectivement 3,7 et 81 fois plus petits que pour la
Terre.– On rappelle que la constante de gravitation universelle est G = 6.67× 10−11 S.I..
4. Pour une masse M donnee, il existe un rayon limite pour lequel la lumiere elle meme ne peut pluss’echapper, on parle alors de trou noir. Calculer ce rayon pour une masse solaire (M=2 1030 kg,c = 3× 108 m.s−1).Ce rayon limite est denomme rayon de Schwarzschild (1873-1916) bien qu’il ai ete invoque pourla premiere fois a la fin du 18eme siecle par les deux astronomes John Michelle et Pierre-Simon deLaplace.
Exercice 3.2.7 (FF) : Un petit morceau de glace de masse m, repere par le point M , glisse sans frotte-ments sur la surface externe d’un igloo qui est une demi-sphere de rayon R dont la base est horizontale.Au temps t = 0, il est lache sans vitesse initiale d’un point M0 de cote z0 = R sin θ0 ou θ0 est l’angle
(Ox,
−−−→OM0) (voir figure 3.6).
θ
R
x
z uθ
uρ
M
FIG. 3.6 – Glissade sur un igloo.
20 Universite Paris–Sud 11

Phys–103 Mecanique I TD 3
1. Determiner les composantes de la vitesse et de l’acceleration dans un repere local (O, ~uρ, ~uθ) lie a M(voir figure 3.6).
2. On designe par ~N la reaction de la demi-sphere sur M . En utilisant la relation fondamentale de ladynamique, determiner l’expression de ‖
−→N ‖ en fonction de la norme de la vitesse v = ‖−→v ‖ de M .
3. En utilisant le theoreme de l’energie cinetique, donner l’expression de v puis ‖−→N ‖ en fonction de
l’angle θ.
4. Representer la variation de ‖−→N ‖ en fonction de θ. Pour quelle valeur de θ, le point M “decolle-t-il”
de l’igloo ? Quelle est alors sa vitesse de decollage ? Quelle est la nature de la trajectoire quand lamasse m quitte la surface de l’igloo ?
5. Montrer que le cas particulier θ0 = π2
correspond a une position d’equilibre. Etudier sa stabilite.
6. Application numerique : On donne m = 80 kg, θ0 = 60, g = 10 ms−2, R = 2 m. Calculer l’energietotale du systeme (on prendra l’origine de l’energie potentielle en θ = 0) avant et apres le decollageen negligeant les frottements de l’air. Calculer la vitesse au decollage. Quelles sont les incertitudesrelatives pour ces trois quantites si on suppose une incertitude relative de 1% sur m, R et θ0 .
Universite Paris–Sud 11 21

TD 3 Mecanique I Phys–103
22 Universite Paris–Sud 11

Phys–103 Mecanique I TD 4
TD 4
Moment cinetique
Exercice 4.1 (F) Moment d’une force : Soient 3 forces :
~F1 =~i ~F2 = −2~j + ~k ~F3 = −~i+ 0, 5~j − 4~k
Determiner la force resultante ~R. On suppose que les forces s’appliquent au point A(4,−3, 1) :
1. Calculer le moment ~Mi =−→OA ∧ ~Fi de chacune des forces par rapport a O(0, 0).
2. Calculer la somme ~M des moments.
3. Calculer le moment ~M ′=−→OA ∧ ~R de la resultante ~R par rapport a O.
4. Comparer ~M et ~M ′ .
5. Calculer l’angle de ~M′ avec ~R. Pouvait-on prevoir le resultat ?
Exercice 4.2 (FF) : Du sommet O d’une tour, on lance a l’instant t = 0, dans le champ de gravitationterrestre ~g = −‖−→g ‖−→uz , un objet assimilable a un point materiel A de masse m avec une vitesse initialehorizontale −→v0 = ‖−→v0‖−→uy . On neglige tout frottement, on suppose le referentiel terrestre galileen et ‖−→g ‖ =9,81 m.s−2.
1. Rappeler l’expression des coordonnees y et z de A a l’instant t (origine des coordonnees en O).
2. En deduire l’expression :
(a) du moment par rapport a O des forces agissant sur A a l’instant t :−→MO(t).
(b) du moment cinetique de A par rapport a O, a l’instant t : ~LO(t).
3. Verifier le theoreme du moment cinetique.
Exercice 4.3 (FF) : Un point materiel M de masse m glisse sans frottements sur un plan horizontal P . Ilest retenu par un fil de masse negligeable qui coulisse a travers un petit trou situe en O du plan horizontalet on fait varier manuellement la distance ρ = ‖
−−→OM‖ selon la loi ρ = −V t + ρ0 ou V est une constante
positive (voir figure 4.1). A t = 0, M se trouve en M0(ρ0) et possede une vitesse ~v0 situee dans le plan Pet faisant un angle α avec
−−→OM0.
1. En appliquant le theoreme du moment cinetique, trouver une premiere quantite conservee.
Universite Paris–Sud 11 23

TD 4 Mecanique I Phys–103
M
OP
FIG. 4.1 – Le fil coulisse a travers un petit trou . . .
2. Dans le bon choix des coordonnees, exprimer la vitesse ~v de M en fonction des donnees.
3. Calculer la tension exercee par le fil sur le point mobile. Montrer que sa norme, au voisinage de ρ = 0tend vers une limite non physique.
4. Determiner la trajectoire du point M
Exercice 4.4 (FF) : Un point materiel M de masse m glisse sans frottements sur un plan horizontal P .Il est retenu par un fil de masse negligeable qui s’enroule autour d’un cylindre fixe de rayon a et d’axeOz, O etant dans le plan P . On note r la distance HM , H etant le point ou le fil rejoint le cylindre (H estegalement dans le plan P ). On repere H par ses coordonnees polaires et on repere M dans la base localeliee a H (~uρ, ~uθ) (voir figure 4.2). On designe par l la longueur totale du fil. A t = 0, le point M est lancede telle facon que le fil s’enroule autour du cylindre en restant tendu.
M
M
H
H
z
O
P
O
θθu ρu
r
xa
FIG. 4.2 – Le fil s’enroule autour d’un cylindre . . .
1. Faire le bilan des forces s’exercant sur M a l’instant t.
2. En remarquant que :−−→OM = a~uρ+r~uθ , calculer la vitesse ~v du pointM et montrer qu’elle est toujours
perpendiculaire a HM . En deduire que ‖−→v ‖ et donc l’energie cinetique Ec de M sont constantes.
24 Universite Paris–Sud 11

Phys–103 Mecanique I TD 4
3. Calculer en fonction de m, r et Ec le moment cinetique de M en O puis la force s’exercant sur M.
Exercice 4.5 (FF) Atome de Bohr : On considere un electron de charge −e et de masse m en orbiteautour d’un proton fixe de charge +e situe a l’origine O du systeme de coordonnees. Soit M le pointrepresentant la position de l’electron, soient r = ‖
−−→OM‖ et ~ur =
−−→OMr
.
1. Montrer que la trajectoire de l’electron est plane. Dans la suite, on utilisera des coordonnees polaires(r, θ) pour decrire la position de l’electron. On negligera les effets de gravitation.
2. La force ~F subie par l’electron a pour expression dans la base polaire (~ur, ~uθ) : ~F = −K~ur/r2 (ona pose K = e2/(4πε0)). Montrer que ~F derive d’une energie potentielle Ep(r) qu’on exprimera enfonction de K et r (on prendra une energie potentielle nulle a l’infini).
3. On note ~uI = ~ur ∧ ~uθ. Soit ~L le moment cinetique de l’electron par rapport a O. Exprimer lescoordonnees de ~L dans la base (~ur, ~uθ, ~uI) en fonction de m, r, et θ = dθ
dt.
4. On considere desormais que l’electron reste sur une orbite circulaire de rayon R. En utilisant leprincipe fondamental de la dynamique en deduire :
(a) que le mouvement est circulaire uniforme
(b) l’expression de la norme v de la vitesse de l’electron en fonction de K, m et R.
(c) que l’energie mecanique totale est E = − K2R
.
5. Calculer la norme L du moment cinetique de l’electron en fonction de K, m et R. Retrouver ceresultat – a une constante pres – par une equation aux dimensions (c’est-a-dire chercher α, β, γ telsque L = KαmβRγ).
6. En 1913 Niels Bohr a fait l’hypothese que L ne pouvait prendre que des valeurs du type suivant :Ln = n~ ou n ∈ N et ~ = 1.055× 10−34 J.s (~ est appele constante de Planck). Montrer alors que lesvaleurs possibles pour le rayon R et l’energie mecanique totale E se mettent sous la forme :
Rn = RBn2 et En = −EB
n2.
On exprimera RB et EB en fonction de ~, m et K. Donner les valeurs numeriques de RB et EBrespectivement en angstroms (1A = 10−10 m) et en electron-volts (1 eV = 1.602 × 10−19 J). Ondonne K = 2.31× 10−28 S.I et m = 9.11× 10−31 kg.
Universite Paris–Sud 11 25

TD 4 Mecanique I Phys–103
26 Universite Paris–Sud 11

Phys–103 Mecanique I TD 5
TD 5
Mouvement a force centrale
5.1 Generalites
Exercice 5.1.1 (F) : Un point materiel M de masse m est soumis a une force dont le support passeconstamment par un point fixe O. L’intensite de cette force est inversement proportionnelle au cube dela distance r = ‖
−−→OM‖. On posera F = Km
r3, en convenant que K et F sont positifs si la force est
repulsive, negatifs si elle est attractive.
1. Montrer que le mouvement de M est plan et qu’il satisfait a la loi des aires.
2. Dans le plan de la trajectoire, on repere le point M a l’aide des coordonnees polaires (r, θ) d’origineO. On posera r2θ = C. En appliquant le principe fondamental de la dynamique et en tenant comptede la loi des aires, montrer que r(t) est solution d’une equation differentielle du second ordre qu’onappellera equation (I).
3. En appliquant le theoreme de l’energie cinetique, montrer que r(t) est solution d’une equation differentielledu premier ordre qu’on appellera equation (II).
4. Les equations (I) et (II) sont-elles equivalentes ?
5. On suppose que les conditions initiales sont telles qu’a l’instant t = 0, le point M se trouve en A decoordonnees r0 = a, θ0 = 0. La vitesse initiale est perpendiculaire a
−→OA. On orientera le plan de
telle sorte que C soit positive. Quelle valeur particuliere C0 faut-il donner a C pour que la trajectoiresoit un cercle de centre O ? Quelle doit etre la nature de la force ? Quelle est en fonction de K et a laperiode du mouvement ?
5.2 Gravitation - Lois de Kepler
Exercice 5.2.1 (F) : Une comete decrit une orbite elliptique autour du Soleil. On considere deux points Aet B de cette orbite, A etant plus eloigne du Soleil que B . Comparer en A et B les valeurs des grandeursphysiques relatives a la comete :
1. energie potentielle ;
2. vitesse (en module) ;
3. acceleration (en module) ;
Universite Paris–Sud 11 27

TD 5 Mecanique I Phys–103
4. moment cinetique (par rapport au Soleil).
Exercice 5.2.2 (FF) Kepler et Newton : Kepler enonce entre 1609 et 1618 les trois lois qui regissentdans une tres bonne approximation le mouvement des planetes autour du Soleil.
L1 : Les planetes decrivent des orbites planes elliptiques dont le Soleil est l’un des foyers.
L2 : En des temps egaux, le rayon vecteur−→SP (Soleil-Planete) balaie des aires egales.
L3 : Le rapport du cube du demi-grand axe de la trajectoire d’une planete au carre de la periode orbitaleest une constante independante de la planete.
Newton (1680) enonce la forme bien connue de la loi de l’attraction gravitationnelle entre deux corps. Onse propose ici de la deduire des trois lois de Kepler.
1. Montrer que les lois L1 et L2 permettent de prouver que r2θ2
est une constante du mouvement qu’onnote C.
2. Montrer alors que l’acceleration de chaque planete est centripete. En deduire que la force de Newtonest attractive et s’ecrit :
−→F = −m4C2
p
1
r2−→u r
ou p est le parametre de l’ellipse d’equation : r = p(1+e cos θ)
.
3. En deduire que :−→F = −m4π2a3
T 2
1
r2−→u r
ou T est la periode du mouvement de la planete. Montrer a partir de L3 et du principe de l’action etde la reaction que G = 4π2a3
MST 2 , MS designant la masse du soleil.
5.3 Dynamique spatiale
Exercice 5.3.1 (F) Lancement d’un satellite : Un satellite de massem est lance d’un point P de la surfacede Terre (rayon R) a la latitude λ puis il est mis sur une orbite circulaire (C) de rayon r = R + h, dans unplan incline de λ par rapport au plan equatorial.
1. Calculer, dans les 2 cas suivants, l’energie Ef qu’il a fallu fournir a ce satellite pour le mettre sur unetelle orbite :
(a) En negligeant la rotation de la Terre sur elle-meme.
(b) La Terre tourne sur elle-meme d’un mouvement uniforme de vitesse angulaire ω. Distinguerles 2 sens de rotation du satellite par rapport a la Terre. En deduire la latitude λo et le sens delancement les plus avantageux pour un tel lancement.
2. On suppose que λ = λo et m = 80 kg. Quel est l’ecart relatif ∆EfEf
du a la rotation de la Terre pourh R On donne : R = 6370 km, go = 9, 8 m.s−2.
3. On suppose le satellite geostationnaire. Que vaut alors h ? Reprendre la question 2 avec la nouvellevaleur du rayon.
28 Universite Paris–Sud 11

Phys–103 Mecanique I TD 5
Exercice 5.3.2 (FF) Changement d’orbite : Un satellite de masse m tourne autour de la Terre sur uneorbite circulaire (orbite ”basse” de rayon r1 et de vitesse v1). On veut le transferer sur une autre orbitecirculaire (orbite ”haute” de rayon r2 > r1 et de vitesse v′2). Pour cela on lui fait decrire une demi-ellipsedite orbite de transfert, dont un foyer est le centre de la Terre et qui se raccorde tangentiellement aux deuxorbites circulaires precedentes. On allume donc les propulseurs du satellite pendant une duree breve audebut et a la fin de cette demi-ellipse. Ceci correspond a communiquer a chaque fois au satellite, de faconinstantanee, un supplement de vitesse sans changement de sa direction. Le but de cet exercice est de calculerces supplements de vitesse ∆v1 = v′1 − v1 et ∆v2 = v′2 − v2 en fonction des rayons, r1, r2, du rayon R, dela Terre et de g0 l’acceleration de pesanteur a la surface de la Terre.
1. Faire un schema representant la Terre, les deux orbites cirulaires et l’orbite de transfert.
2. Determiner la norme de la vitesse v1 du satellite sur l’orbite circulaire de rayon r1 en fonction de R,g0 et r1.
3. Determiner la norme de la vitesse v′2 du satellite sur l’orbite finale circulaire de rayon r2 en fonctionde R, g0 et r2.
4. En se servant des lois de conservation, etablir deux relations reliant la vitesse initiale v′1 et la vitessefinale v2 sur l’orbite de transfert. En deduire v′1 et v2 en fonction de R, g0 et r1 et r2.
5. Calculer les suplements de vitesse ∆v1 = v′1 − v1 et ∆v2 = v′2 − v2 en fonction de R, g0 et r1 et r2.On prendra r1 = 7000 km, r2 = 42000 km, le rayon de la Terre R = 6400 km et g0 = 9, 81 ms−2
Exercice 5.3.3 (FF) Retour d’un satellite : Pour ramener sur la Terre un satellite geostationnaire S, onle ralentit au moment ou il atteint un certain point A de sa trajectoire, sa vitesse passant donc d’une valeur usur l’orbite geostationnaire a vA < u, mais gardant la meme direction. On appellera T le centre de la Terre.
1. calculer u et le rayon rs de la trajectoire geostationnaire.
2. A.N. :RT = 6400 km, g0 = 10 m/s2.
3. Comparer l’energie de S sur l’orbite geostationnaire et apres ralentissement. En deduire la nature desa nouvelle trajectoire (E).
4. On veut que le satellite atterrisse en un point C tel que TA ⊥ TC. Que representent les points T etA, et la distance TC pour (E) ?
5. Calculer la vitesse vA pour que l’atterrissage se deroule ainsi. Monter que vA s’exprime simplementen fonction de u, RT et rs. Aide : calculer d’abord a le demi-grand axe de E en fonction de RT et ders.
6. Faire l’application numerique.
Exercice 5.3.4 (FFF) Survol de Saturne par Voyager 2 (26-8-81) : On assimile Saturne et la SondeVoyager 2 a deux points materiels, notes respectivement O et P et de masse M et m, avec m M .On se place dans le referentiel galileen lie au point O qui est suppose immobile pendant la rencontre (carm M ). Soit ~v0 la vitesse d’approche, quand la sonde est tres eloignee de Saturne. On note b la distancede O a la droite passant par P et parallele a ~v0. b est appele le parametre d’impact (voir figure 5.1).
Universite Paris–Sud 11 29

TD 5 Mecanique I Phys–103
x O
PA
vA
b ρθ a
v0
FIG. 5.1 – Survol de saturne par Voyager 2
1. Conditions de survol : L’interaction gravitationnelle inflechit la trajectoire au voisinage de Saturne.Soit a la distance minimale de survol ‖
−→OA‖, −→vA la vitesse de P en A et G la constante de gravitation
universelle. Expliquer simplement l’orthogonalite de−→OA et −→vA. A partir des lois de conservation
s’appliquant au mouvement de P , exprimer vA en fonction de v0, a et b et calculer le rapport ba. On
prendra v0 = 15 km.s−1, a = 161500 km, M = 5.7× 1026 kg et G = 6.673× 10−11 SI.
2. Trajectoire : On repere ici le point P par ses coordonnees polaires ρ(t) et θ(t). Soit −→v (t) la vitessedu point P .
(a) Justifier et exprimer en coordonnees polaires deux lois de conservation s’appliquant au mouve-ment de P .
(b) On pose C = v0b et u = 1ρ
. Reformuler le carre de la vitesse v2 en fonction de C, u et dudθ
.
(c) La loi de conservation de l’energie conduit a une equation differentielle dont la solution est dela forme :
u(θ) =1
ρ(θ)=GM
C2(1 + e cos(θ − θ0))
Calculer e en fonction de v0, b, G et M . Verifier que e > 1.
(d) En utilisant la condition limite en θ = 0, chercher la relation donnant θ0. Quelle est la significa-tion physique de θ0 ?
(e) On note θe l’angle d’eloignement de la sonde. C’est a dire l’angle θ qui repere la sonde quandelle est a une grande distance de Saturne apres son survol. Determiner l’expression de θe enfonction des donnees du probleme.
(f) L’angle de deviation χ de la sonde est l’angle entre les vecteurs vitesses de la sonde, avant etapres son survol de Saturne. Donner la valeur numerique de χ.
Exercice 5.3.5 (FF) La comete Hale-Bopp :
1. On admet que la Terre decrit un cercle de rayon ρ autour du Soleil S a la vitesse u = 30 km.s−1.
(a) Ecrire la relation entre u, ρ et la masse du Soleil MS .
(b) Exprimer la periode τ de rotation de la Terre autour du soleil en fonction de ρ et de MS .
Dans la suite du probleme, les quantites u, ρ et τ serviront d’unites de base pour exprimer respecti-vement les vitesses, les distances et les temps.
30 Universite Paris–Sud 11

Phys–103 Mecanique I TD 5
FIG. 5.2 – Comete Hale-Bopp. Observer : Wally Pacholka Location : Joshua Tree National Park, CaliforniaDate : April 5, 1997 05 :30-05 :50 UT. (http ://www.jpl.nasa.gov/comet)
2. Dans un premier temps, on suppose que la comete C de Hale-Bopp (1997) suit une trajectoire para-bolique de foyer S dont le perihelie1 q est egal a 0.9145ρ. Caracteriser cette trajectoire. En deduire lavitesse de C au perihelie P en fonction de u, ρ et q. On fera l’application numerique. (pour compa-raison, la comete de Hale-Bopp est passee a 1.3ρ de la terre environ).
3. En realite, la trajectoire de C est elliptique, d’excentricite e = 1− x avec x = 4.75× 10−3
(a) Determiner la distance SA ou A est l’aphelie2, et la vitesse de C en A. on fera l’applicationnumerique.
(b) Dans combien d’annee T “reverra-t-on” Hale-Bopp ? Dans ce but, etablir la formule suivante :
T = τ
(q
ρx
) 32
En admettant que e et qρ
ont ete determines chacun avec une precision de 0.03% en deduire laprecision sur T . Exprimer T lui meme avec son incertitude.
1le perihelie est le point de l’orbite le plus rapproche du Soleil2l’aphelie est le point de l’orbite le plus eloigne du soleil
Universite Paris–Sud 11 31

TD 5 Mecanique I Phys–103
32 Universite Paris–Sud 11

Phys–103 Mecanique I TD 6
TD 6
Systeme a deux corps, centre de masse, collisions
6.1 Centre de masse
Exercice 6.1.1 (F) Systeme Terre-Lune : Est-ce que le centre de masse du systeme Terre-Lune se trouve al’exterieur ou a l’interieur de la Terre ? On donneMT ' 6 ·1024 kg,ML ' 7, 4 ·1022 kg,RTL ' 380000 km,RT ' 6400 km.
Exercice 6.1.2 (F) : Soient trois points materiels de masses identiques situes dans le plan Oxy et reperespar leurs coordonnees cartesiennes en centimetres :
A(0, 0), B(2, 0), C(0, 3).
Determiner les coordonnees du centre de masse des points (A,B,C). On fera un schema.
Exercice 6.1.3 (F) Proprietes geometriques :
1. Montrer que le centre de masse G123 de trois points materiels (M1,M2,M3), de masses respectivesm1, m2, et m3 est le centre de masse des deux points materiels (G12,M3) de masses respectivesm1 +m2 et m3.
2. Generaliser cette propriete au cas de N points materiels (N > 3).
3. En deduire une construction graphique du centre de masse d’un triangle, puis d’un quadrilatere formede masses identiques.
Exercice 6.1.4 (FF) Mouvement planetaire : Une planete est assimilee a un point materiel P de massem. Elle est soumise a la seule attraction gravitationnelle d’une etoile assimilee a un point materiel E etde masse M . On etudie le cas ou la planete et l’etoile se deplacent dans un meme plan sur des cerclesconcentriques de meme centre O et de rayons differents notes r pour la planete et R pour l’etoile, avecr > R. Le point O sera suppose fixe dans le referentiel galilieen lie a l’observateur
1. Trajectoires, vitesses et quantites de mouvement :
Universite Paris–Sud 11 33

TD 6 Mecanique I Phys–103
(a) Representer les trajectoires, les points O, P , E (on pourra prendre pour le dessin : r = 6 cm etR = 3 cm).
(b) Soient (E,−→uR,−→uθ) et (P,−→ur ,−→uϕ) les reperes locaux utilises pour etudier les mouvements del’etoile et de la planete. Representer ces vecteurs sur votre dessin.
(c) Exprimer dans leurs reperes locaux les vecteurs vitesse de la planete et de l’etoile,−→VP et
−→VE .
(d) Meme question pour les vecteurs quantite de mouvements de la planete et de l’etoile,−→PP et
−→PE .
En deduire l’expression de la quantite de mouvement totale du systeme planete + etoile,−−→PTot.
(e) Representez les vecteurs−→PP et
−→PE .
2. Vitesses angulaires
(a) Faire le bilan des forces. Ecrire ces forces dans les reperes locaux. Representer-les sur le schema.
(b) Appliquer le principe fondamental de la dynamique au systeme planete + etoile. En deduire que−−→PTot est constant. Justifier ensuite que
−−→PTot =
−→0 .
(c) En deduire que les vitesses angulaires de la planete et de l’etoile sont egales. Si necessaire, re-faire un nouveau schema avec les 2 trajectoires concentriques, l’etoile et la planete etant placeesdans la seule position possible a un instant donne.
(d) Exprimer le moment cinetique de la planete par rapport a O,−→LP , en fonction de r, m, ϕ et −→uz .
(e) Montrer que−→LP est constant. En deduire que ϕ et θ sont constants.
(f) En deduire que M R = mr : le point O est le centre de masse du systeme etoile + planete.
6.2 Collisions
Exercice 6.2.1 (F) Experience de Chadwick : Des neutrons de masse m sont emis avec une vitesse v parune cible de beryllium frappee par des particules α (les particules α sont des noyaux d’Helium (He)). Onbombarde avec ces neutrons des cibles contenant des atomes d’hydrogene ou d’azote au repos et l’on mesureles vitesses maximales v′p et v′N des protons ou des noyaux d’azote emis (en prenant comme hypothesesMN = 14 Mp et v′p = 7.5 v′N ). En supposant les collisions elastiques, montrer que l’on peut en deduire unevaleur approchee de la masse du neutron.
Exercice 6.2.2 (F) Ralentisseur de neutrons : Dans un reacteur nucleaire, les neutrons rapides emis aucours de la fission de l’uranium doivent etre ralentis. Pour realiser ce ralentissement, on leur fait traverserun materiau dans lequel ils subissent des collisions avec des noyaux que l’on considerera au repos. Ensupposant que les collisions sont frontales, calculer la perte d’energie cinetique subie par un neutron demasse m1 de vitesse v1 qui heurte un atome de masse m2. Dans quelles conditions la perte d’energie est-elle maximale ?
Exercice 6.2.3 (FF) Trains : Une locomotive de masse m1 cherche a accrocher un train de wagon aurepos de masse m2. Pour cela elle se dirige en ligne droite a vitesse constante v1 vers le train de wagons.
34 Universite Paris–Sud 11

Phys–103 Mecanique I TD 6
1. La locomotive rate sa manoeuvre. On suppose le choc elastique, determiner les vitesses v′1 et v′2 de lalocomotive et du train de wagons apres le choc.
2. La locomotive reussit la manoeuvre et on suppose que le choc est parfaitement mou.
(a) Determiner la quantite de mouvement du convoi (locomotive + wagons) apres le choc.
(b) Determiner la quantite d’energie ∆E absorbee par le choc en fonction des masses et de la vitessev1 de la locomotive avant le choc.
(c) Pour comprendre la signification de ∆E on reprendra les deux questions precedentes mais dansle referentiel du centre de masse.
(d) Preciser la signification de l’hypothese de choc mou.
3. A.N : v1 = 2 km/h, m1 = 10 tonnes, m2 = 500 tonnes.
Exercice 6.2.4 (FF) : On considere le choc elastique de deux particules de meme masse m et de vitessesinitiales ~v1 donnee et ~v2 = ~0 . On appelle θ et φ les angles entre la direction incidente (direction de ~v1) avecles directions des vitesses finales ~v1
′ et ~v2′ respectivement.
1. Montrer que θ + φ = π2.
2. Calculer la norme v′2 de ~v2′ et l’energie cinetique E ′k,2 communiquees a la particule 2 en fonction de
θ et de v1 = ‖−→v1‖. Pour quelles valeurs de θ, E ′k,2 est elle extremale ?
Universite Paris–Sud 11 35

TD 6 Mecanique I Phys–103
36 Universite Paris–Sud 11

Phys–103 Mecanique I TD 7
TD 7
Dynamique des solides indeformables
7.1 Distribution continue de masse
7.1.1 Centre de masse
Exercice 7.1.1 (F) : Soit une tige homogene de masse m, longueur L. A l’une de ses extremites est fixeeune masse ponctuelle m′. Determiner la position du centre de masse de ce systeme.
Exercice 7.1.2 (FF) Disque evide : Soit une plaque constituee d’un disque D1 de centre O et rayon a,dans laquelle a ete evide un disque D2 de diametre OA = a, A etant un point de la peripherie de D1.Determiner le centre de masse de la plaque.
7.1.2 Moment d’inertie
Exercice 7.1.3 (F) Tige homogene : Calculer le moment d’inertie d’une tige homogene de masse M ,longueur L :
1. par rapport a un axe perpendiculaire a la tige et passant par son centre
2. par rapport a un axe perpendiculaire a la tige et passant par l’une de ses extremites (on fera ce calculde deux facons : d’abord directement, puis en utilisant le resultat de la question precedente et letheoreme de Huygens)
Exercice 7.1.4 (FF) Disque homogene : Calculer le moment d’inertie d’un disque plan homogene demasse M et rayon R
1. par rapport a l’axe perpendiculaire au disque et passant par son centre
2. par rapport a un axe passant par un diametre
Exercice 7.1.5 (FF) Cylindre plein homogene : Calculer le moment d’inertie d’un cylindre plein, ho-mogene, de masse M , de hauteur h et de rayon R, par rapport a l’axe du cylindre.
Universite Paris–Sud 11 37

TD 7 Mecanique I Phys–103
Exercice 7.1.6 (FF) Sphere pleine homogene : Calculer le moment d’inertie d’une sphere pleine ho-mogene de masse M , rayon R, par rapport a un axe passant par un de ses diametres.
Exercice 7.1.7 (F) Plaque carree homogene : Calculer le moment d’inertie d’une plaque carree ho-mogene de masse M et cote a
1. par rapport a un axe parallele a un des ses cotes et passant par son centre
2. par rapport a un axe passant par un de ses cotes.
7.2 Dynamique
Exercice 7.2.1 (F) Rotation d’un cylindre : Un cylindre d’axe vertical, de masse M et rayon R, peuttourner sans frottements autour de son axe. Il est initialement immobile. Puis a partir du temps t = 0, onapplique en un point A de la surface du cylindre une force horizontale et tangente a la surface du cylindre,de module constant F . Determiner la vitesse angulaire acquise par le cylindre au bout de deux tours.
Exercice 7.2.2 (F) Pendule : Soit une tige homogene OA de masse m, longueur l. A l’extremite A de latige est fixee une masse ponctuelle m′. L’autre extremite O de la tige est fixe, et le systeme peut oscillerautour d’un axe horizontal passant par O. Determiner la periode des petites oscillations de ce pendule.
Exercice 7.2.3 (FF) Pendule semi-circulaire : Un solide S a la forme d’un demi-cercle de centre Cet de rayon a, ferme par un diametre. Le fil constituant S a une masse lineıque constante λ. Un repereorthonorme CXY Z est lie au solide S de telle sorte que son origine coıncide avec C et que l’axe CZ soitperpendiculaire au plan de S (voir figure 7.1).
Z
Y
C
H
X
G
Y
Cθ
H
FIG. 7.1 – pendule semi-circulaire
1. Determiner la position du centre de gravite de S.
2. Calculer le moment d’inertie de S par rapport a l’axe CZ.
38 Universite Paris–Sud 11

Phys–103 Mecanique I TD 7
3. On note H le point du demi-cercle situe sur l’axe CY . Le solide peut osciller sans frottements autourd’un axe horizontal HZ perpendiculaire au plan du demi-disque.
(a) Calculer le moment d’inertie IH de S par rapport a l’axe HZ.
(b) Montrer que les petites oscillations du pendule sont sinusoıdales et calculer la periode des os-cillations, en fonction de m, la masse totale du pendule, g, d (distance HG) et IH .
Exercice 7.2.4 (F) Oscillations amorties : Une tige homogene OM de masse m et longueur l, est mobiledans un plan vertical autour d’un axe horizontal fixe passanr par O. L’articulation en O est parfaite. Undispositif amortisseur exerce en un point A de la tige (OA = a) une force de frottement fluide ~f = −k ~vAou ~vA est la vitesse du point A.
1. Etablir l’equation differentielle satisfaite par le mouvement angulaire de la tige.
2. On pose 2λ = 3ka2
ml2et ω2
0 = 32gl. On suppose que la force de frottement est suffisamment faible pour
que λ2 soit tres petit devant ω20 . Montrer que les mouvements de faible amplitude sont des oscillations
amorties et calculer la periode des pseudo-oscillations.
Exercice 7.2.5 (FF) La poulie : Une poulie est constituee d’un disque de rayon R et de masse M . Ellepeut tourner autour d’un axe horizontal Oy passant par son centre O. Une masse ponctuelle m est attacheea une corde (de masse negligeable) enroulee autour de la poulie. A l’instant t = 0, on debloque la poulieauparavant bloquee. On travaille dans un referentiel galileen, et on utilisera un systeme d’axes Oxyz (voirla figure 7.2, l’axe Oy etant oriente pour que le systeme d’axes soit direct). La position de la masse m serareperee par z(t). On rappelle que le moment d’inertie d’un disque de rayon R et de masse M par rapport aun axe passant par son centre s’ecrit : I = MR2
2.
FIG. 7.2 – La poulie
1. Faire le bilan des forces appliquees d’une part a la poulie, d’autre part a la massem (bien tenir comptede la tension de la corde qui est egale en norme aux deux extremites, mais de direction opposee). Lesrepresenter tres soigneusement sur un dessin.
2. Ecrire le principe fondamental de la dynamique pour la masse m. Le projeter sur l’axe Oz.
3. Exprimer vectoriellement le moment de la tension de la corde appliqu’ee a la poulie, par rapport aupoint O, en fonction de R, T (norme de la tension) et −→uy
Universite Paris–Sud 11 39

TD 7 Mecanique I Phys–103
4. Exprimer la projection du moment cinetique de la poulie par rapport a O sur l’axe de rotation enfonction de M,R et dz
dt.
5. En deduire l’acceleration de la masse m, d2zdt2
en fonction de g,m et M . Que se passe-t-il quand lamasse M de la poulie devient tres faible par rapport a m, ou tres grande ? Pouvait-on prevoir cesresultats ?
Exercice 7.2.6 (FFF) Roulement sans glissement d’un cylindre : Un cylindre homogene d’axe Oz,de masse M et de rayon R, roule sans glisser sur un plan incline d’un angle α par rapport a l’horizontale.Soient vG la norme de la vitesse de son centre de masse et ω la vitesse angulaire du mouvement de rotationdu cylindre autour de son axe, a l’instant t.
1. Etablir l’expression de l’energie cinetique du cylindre a un instant donne, en fonction des donnees,de vG et ω.
2. Quelle relation entre vG et ω la condition de roulement sans glissement impose-t-elle ? Soit I le pointdu cylindre qui est en contact avec le sol a l’instant t. Quelle est a l’instant t la vitesse de ce point ?
3. Indiquer sur un schema les forces qui s’exercent sur le cylindre.
4. En utilisant le theoreme de l’energie cinetique, determiner la vitesse du centre de gravite a l’instant t.(on supposera que le cylindre est lache sans vitesse a l’instant t = 0).
40 Universite Paris–Sud 11




















![極限物質の性質を決めるには? - KEK · 2014. 1. 24. · 0.00.10.20.30.40.50.6 baryon density [fm-3] K=281 MeV! K=180 MeV! A sym =36.9 MeV! A sym =29.3 MeV! LS-EOS! Shen-EOS!](https://img.pdfslide.fr/doc/110x75/613fdc56b44ffa75b8047f07/eceei-kek-2014-1-24-00010203040506.jpg)





