Embed Size (px)
Citation preview
1
TRAVAUX PRATIQUES CAPTEURS
TP1-CA1 : APPLICATION DU COUPLAGE PAR MUTUELLE
INDUCTANCE
TP-CA4: ACCELEROMETRE PIEZOELECTRIQUE - CELLULE
SOLAIRE
TP-CA3 : ETALONNAGE DE CAPTEURS DE PRESSION
TP-CA5 : MICHELSON 1 : MESURES SPECTRALES SOURCES
LUMINEUSES
TPP-CA6 : MICHELSON 2 : ETALONNAGE ABSOLU D’UN
ACCELEROMETRE PAR INTERFEROMETRIE LASER
TP-CA2 : ETUDE DES VIBRATIONS D’UNE BARRE
DUT MESURES PHYSIQUES – IUT MARSEILLE - M.PASQUINELL I
2
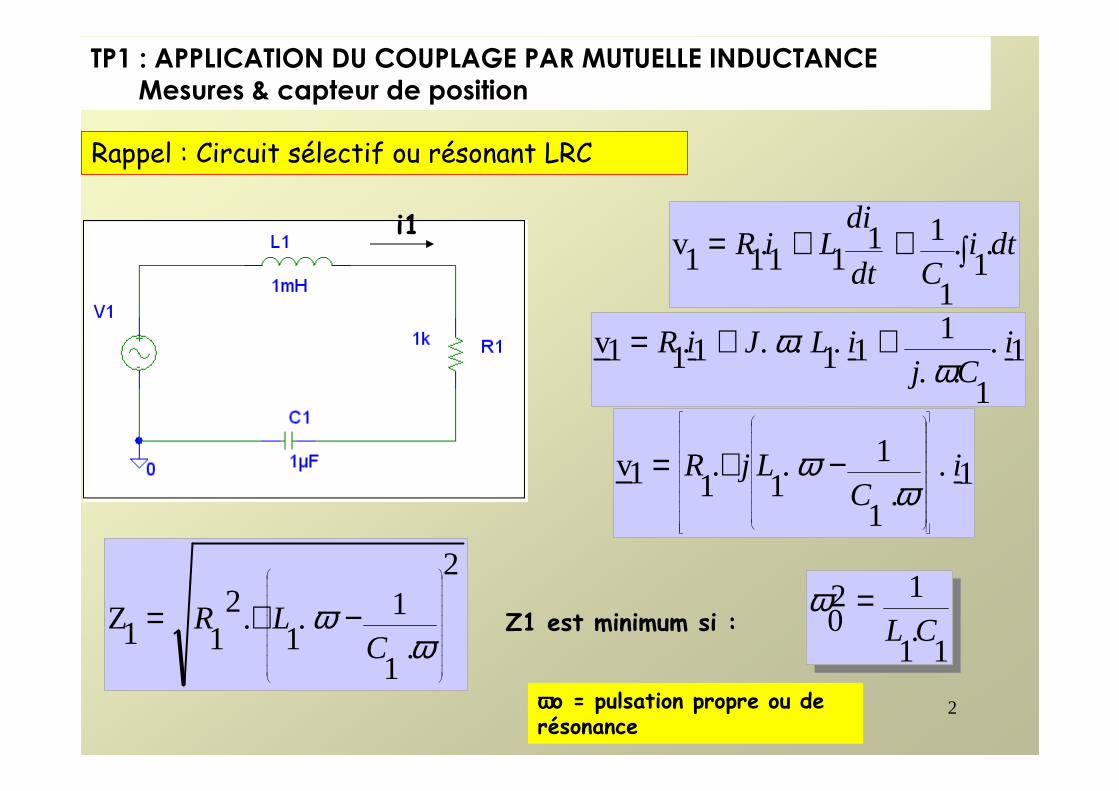
TP1 : APPLICATION DU COUPLAGE PAR MUTUELLE INDUCTANCEMesures & capteur de position
Rappel : Circuit sélectif ou résonant LRC
i1∫++= dti
Cdt
diLiR .
1.
1
1111.11v
1.
1..
11.1..1.11v i
CjiLJiR
ωω ++=
1..
1
1.1
.11v i
CLjR
−+=ω
ω
2
.1
1.1
.211Z
−+=ω
ωC
LR1
.1
120 CL
=ωZ1 est minimum si :
ωωωωo = pulsation propre ou de résonance
3
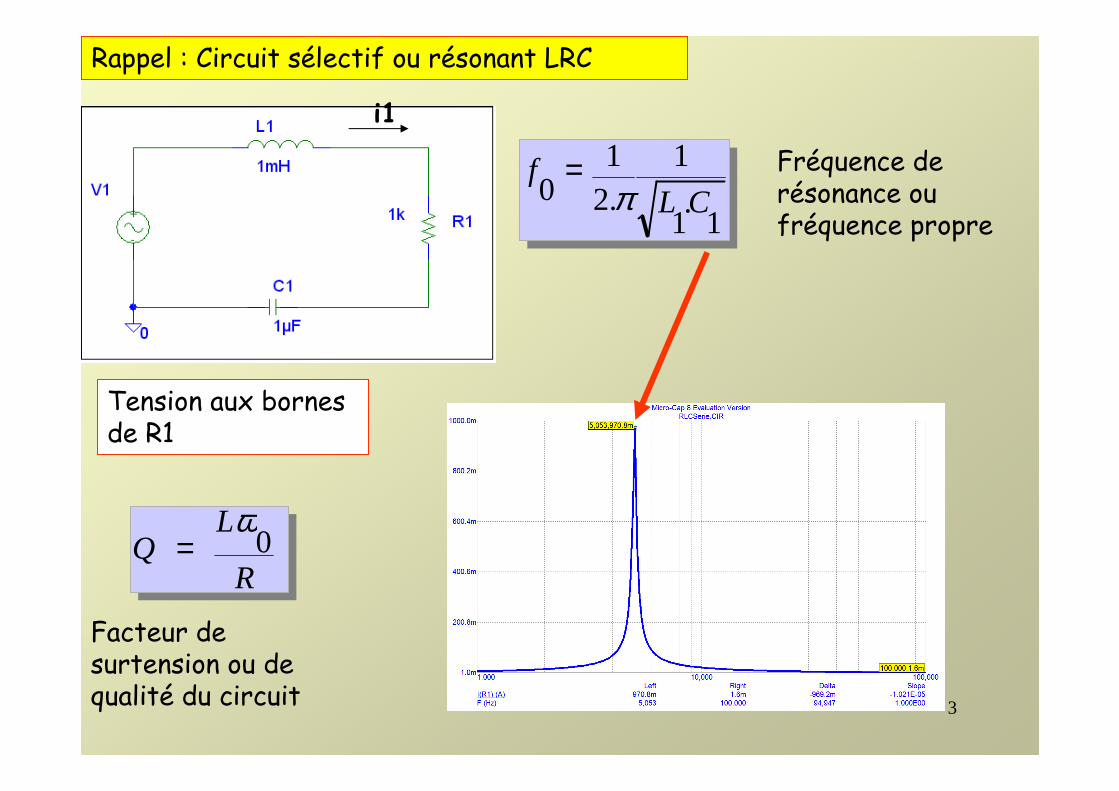
Rappel : Circuit sélectif ou résonant LRC
i1
Fréquence de résonance ou fréquence propre1
.1
1.21
0 CLf
π=
Tension aux bornes de R1
R
LQ 0
ω=
Facteur de surtension ou de qualité du circuit
4
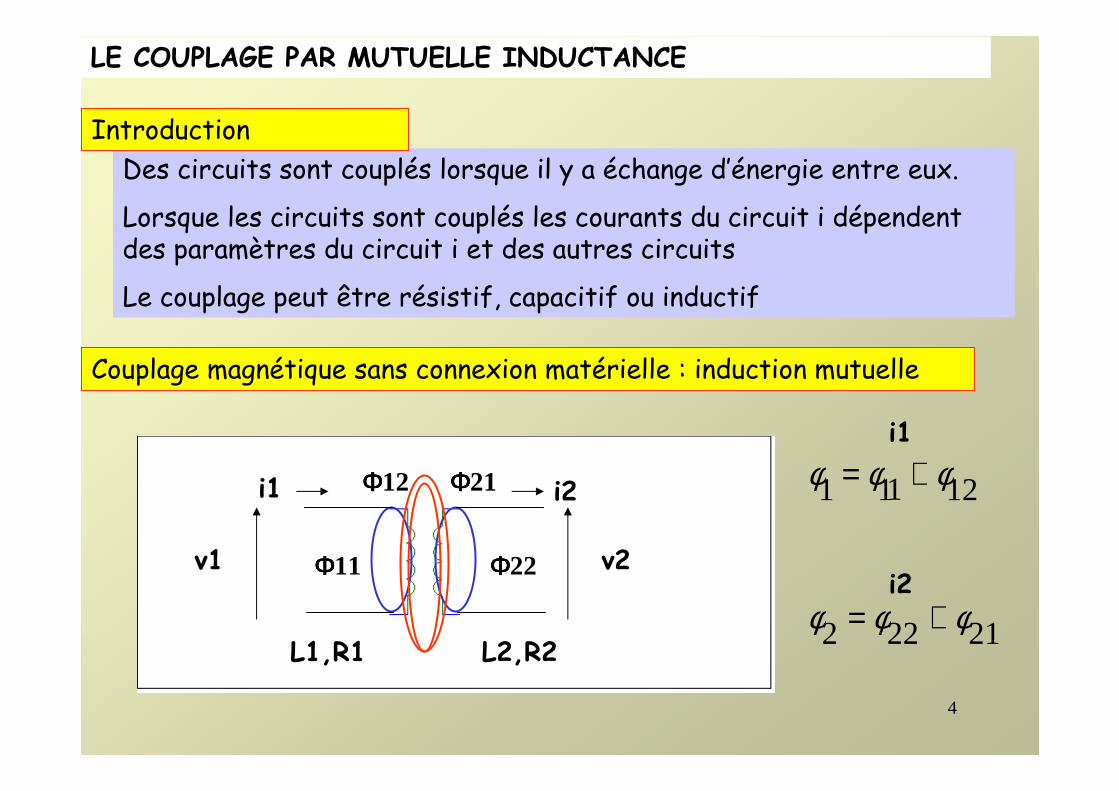
LE COUPLAGE PAR MUTUELLE INDUCTANCE
Des circuits sont couplés lorsque il y a échange d’énergie entre eux.
Lorsque les circuits sont couplés les courants du circuit i dépendent des paramètres du circuit i et des autres circuits
Le couplage peut être résistif, capacitif ou inductif
Couplage magnétique sans connexion matérielle : induction mutuelle
Introduction
ΦΦΦΦ21ΦΦΦΦ12 i2
v1
i1
v2
L2,R2L1,R1
ΦΦΦΦ22ΦΦΦΦ11
12111 φφφ +=
21222 φφφ +=
i1
i2
5
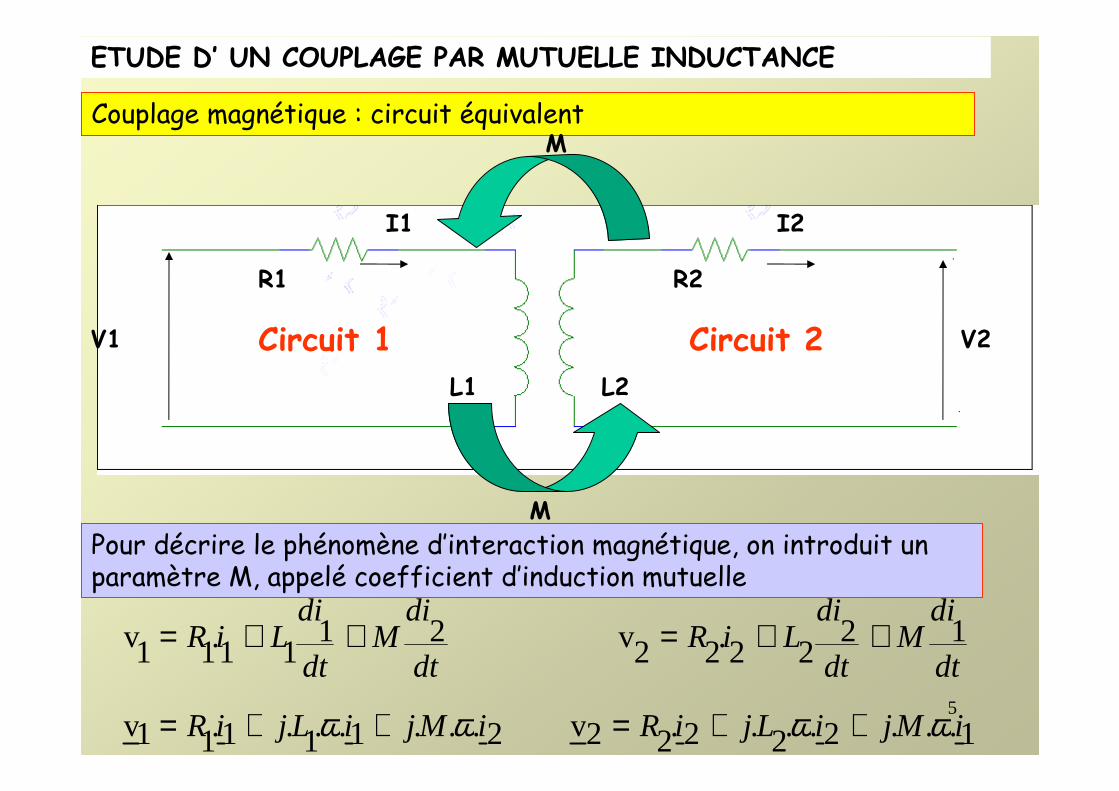
ETUDE D’ UN COUPLAGE PAR MUTUELLE INDUCTANCE
Couplage magnétique : circuit équivalent
R1 R2
L1 L2
I1 I2
Circuit 1 Circuit 2V1 V2
M
M
Pour décrire le phénomène d’interaction magnétique, on introduit un paramètre M, appelé coefficient d’induction mutuelle
dt
diM
dt
diLiR 2111.11v ++=
dt
diM
dt
diLiR 1222.22v ++=
2...1..1.1.11v iMjiLjiR ωω ++= 1...2..2.2.22v iMjiLjiR ωω ++=
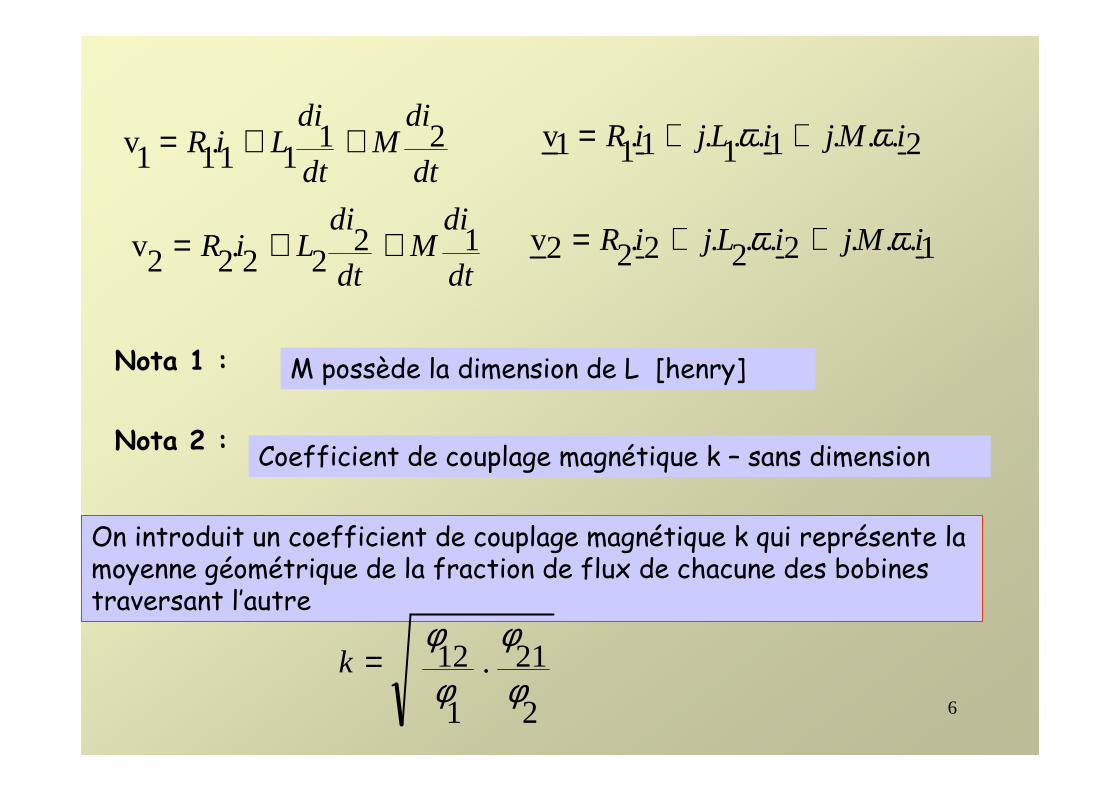
6
dt
diM
dt
diLiR 2111.11v ++=
dt
diM
dt
diLiR 1222.22v ++=
2...1..1.1.11v iMjiLjiR ωω ++=
1...2..2.2.22v iMjiLjiR ωω ++=
Nota 1 : M possède la dimension de L [henry]
Nota 2 : Coefficient de couplage magnétique k – sans dimension
On introduit un coefficient de couplage magnétique k qui représente la moyenne géométrique de la fraction de flux de chacune des bobines traversant l’autre
2
21.
1
12φ
φ
φ
φ=k
7
2
21.
1
12φ
φ
φ
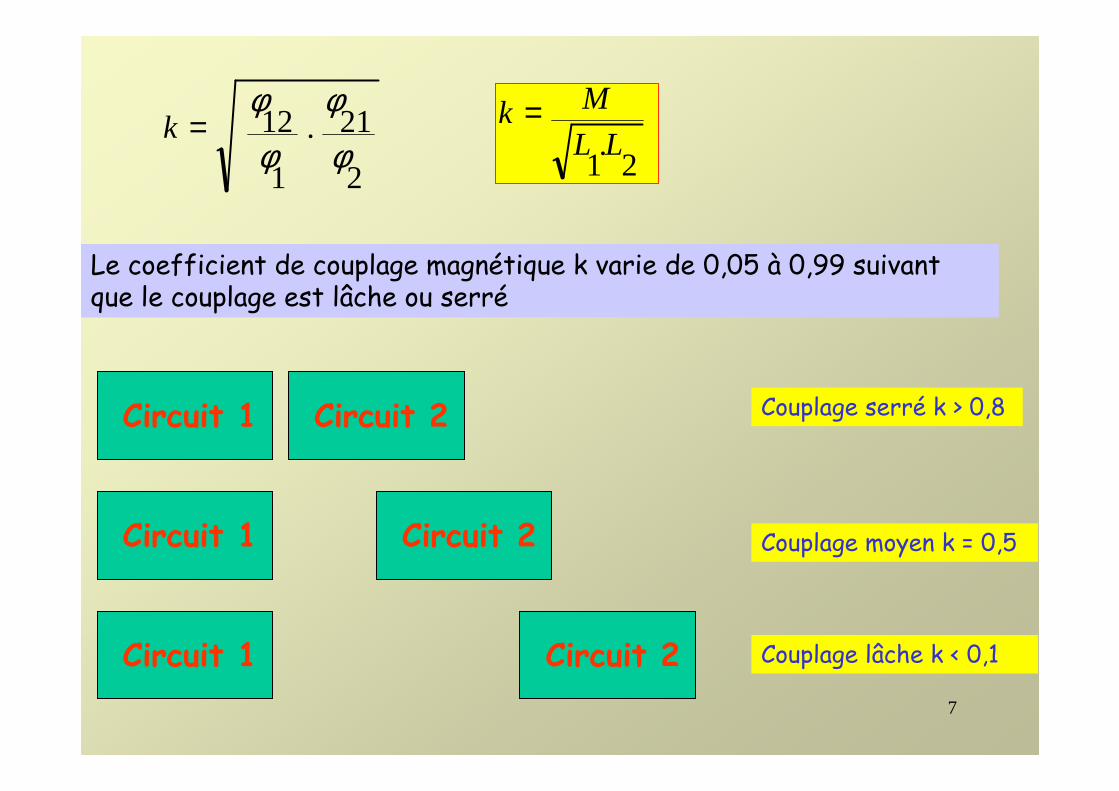
φ=k
2.
1LL
Mk =
Le coefficient de couplage magnétique k varie de 0,05 à 0,99 suivant que le couplage est lâche ou serré
Circuit 1 Circuit 2
Circuit 1 Circuit 2
Circuit 1 Circuit 2
Couplage serré k > 0,8
Couplage moyen k = 0,5
Couplage lâche k < 0,1
8
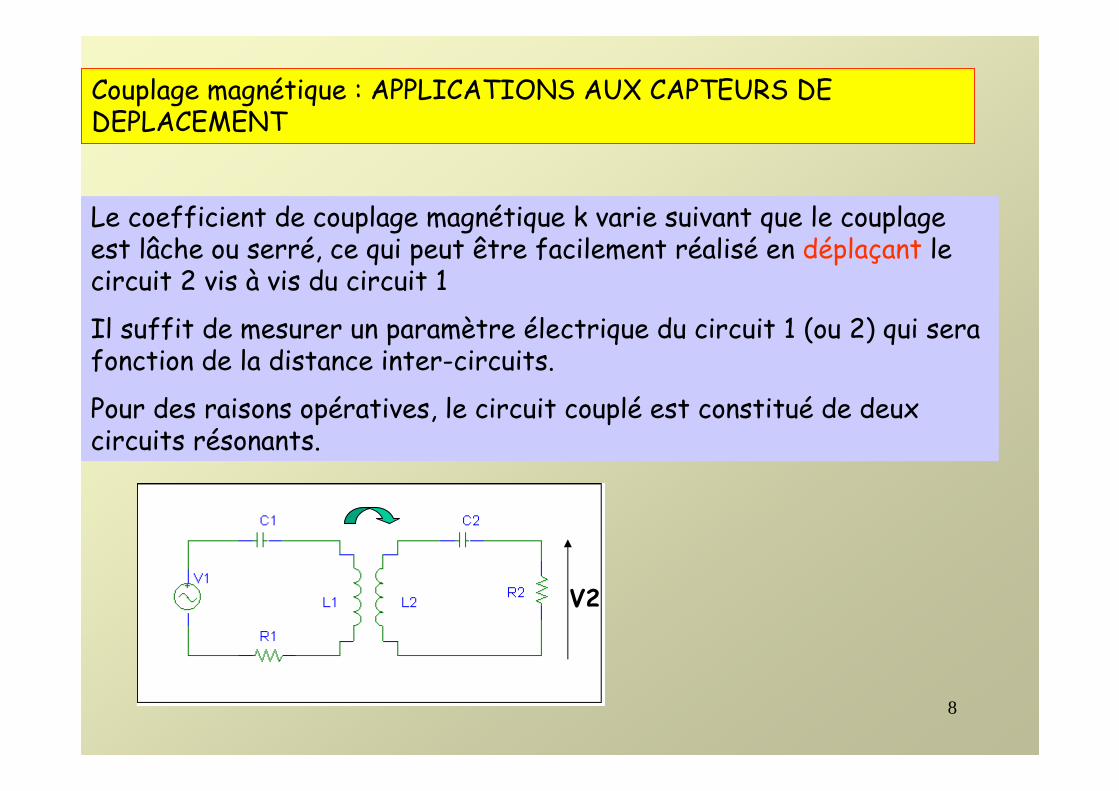
Couplage magnétique : APPLICATIONS AUX CAPTEURS DE DEPLACEMENT
Le coefficient de couplage magnétique k varie suivant que le couplage est lâche ou serré, ce qui peut être facilement réalisé en déplaçant le circuit 2 vis à vis du circuit 1
Il suffit de mesurer un paramètre électrique du circuit 1 (ou 2) qui sera fonction de la distance inter-circuits.
Pour des raisons opératives, le circuit couplé est constitué de deux circuits résonants.
V2
9
R1
U2R2
C2
L1 L2
U1C1
x 0k
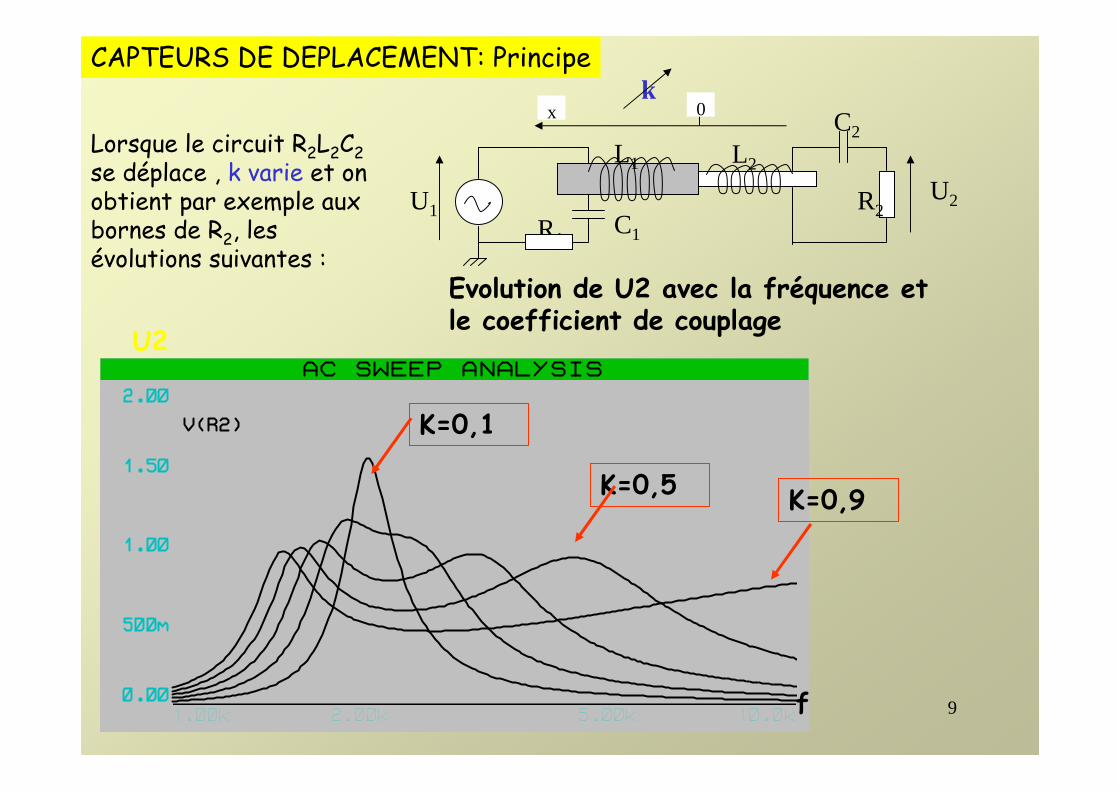
Lorsque le circuit R2L2C2se déplace , k varie et on obtient par exemple aux bornes de R2, les évolutions suivantes :
CAPTEURS DE DEPLACEMENT: Principe
K=0,1
K=0,5K=0,9
Evolution de U2 avec la fréquence et le coefficient de couplage
U2
f
10
K=0,1
K=0,5K=0,9
f
U2
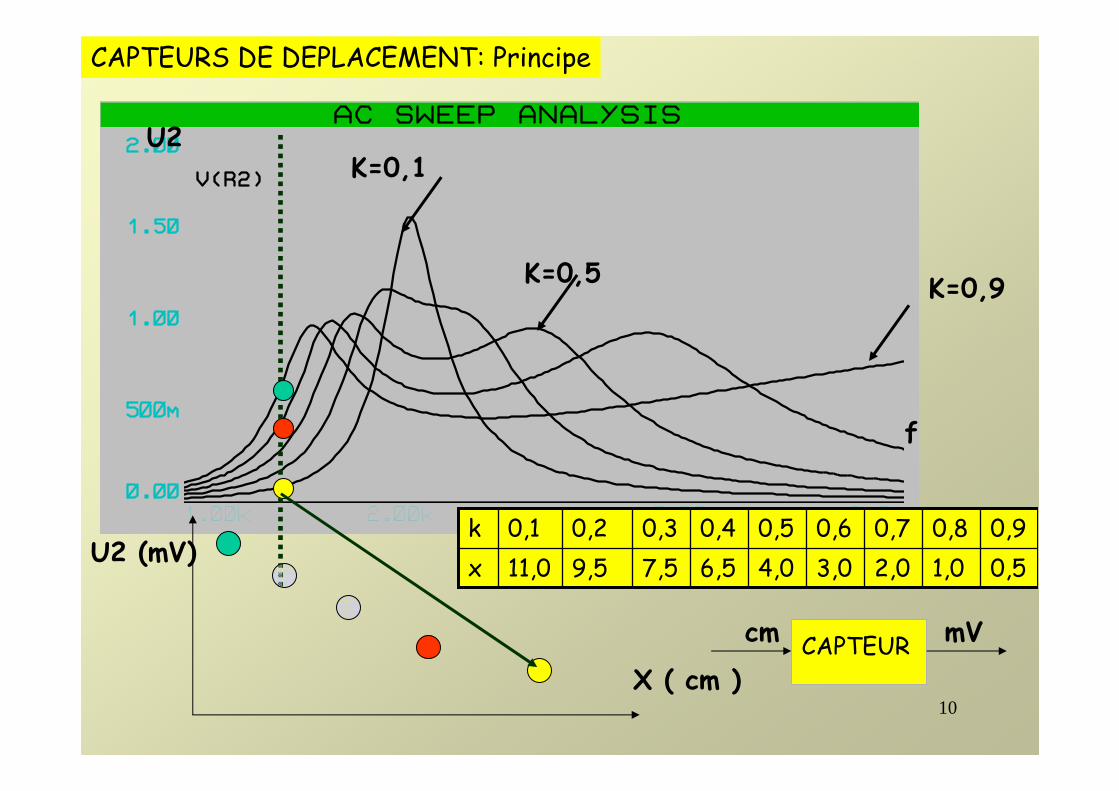
CAPTEURS DE DEPLACEMENT: Principe
0,51,02,03,04,06,57,59,511,0x
0,90,80,70,60,50,40,30,20,1kU2 (mV)
X ( cm )CAPTEURcm mV
11
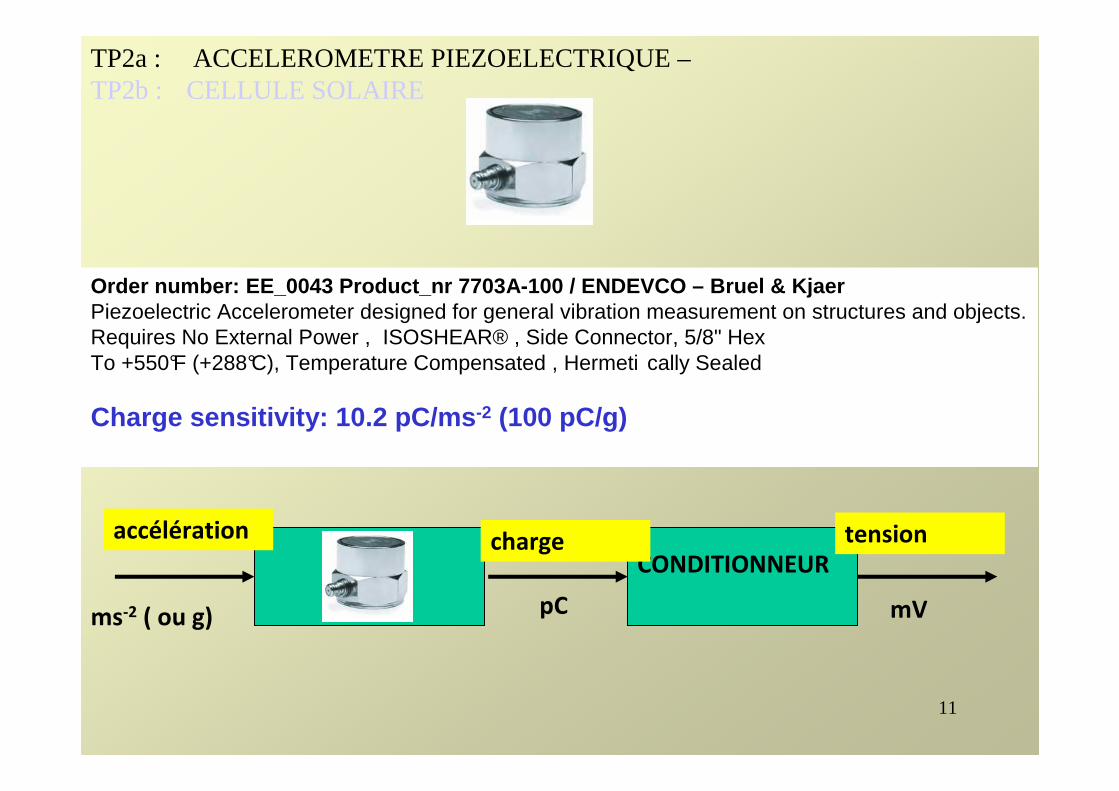
TP2a : ACCELEROMETRE PIEZOELECTRIQUE –TP2b : CELLULE SOLAIRE
Order number: EE_0043 Product_nr 7703A-100 / ENDEVCO – Bruel & KjaerPiezoelectric Accelerometer designed for general vibration measurement on structures and objects. Requires No External Power , ISOSHEAR® , Side Connector, 5/8" HexTo +550°F (+288°C), Temperature Compensated , Hermeti cally Sealed
Charge sensitivity: 10.2 pC/ms -2 (100 pC/g)
CONDITIONNEUR
ms-2 ( ou g) pC mV
accélération charge tension
12
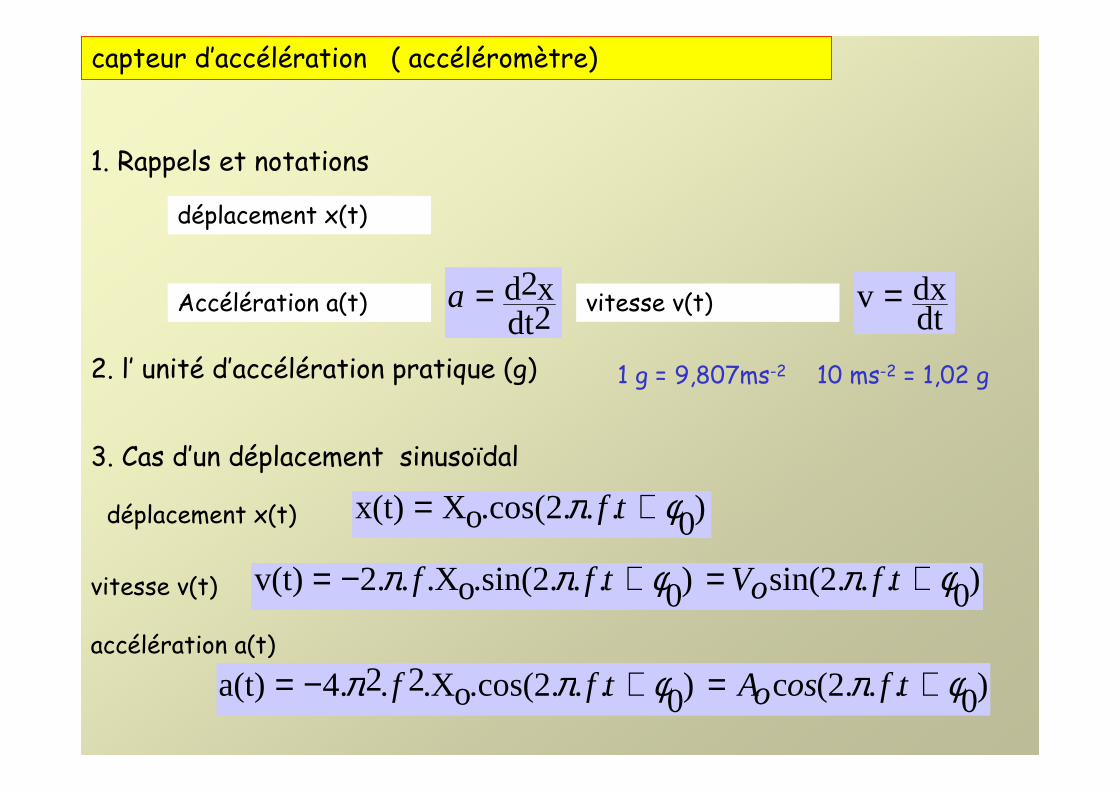
capteur d’accélération ( accéléromètre)
déplacement x(t)
Accélération a(t) vitesse v(t)2dtx2d=a
dtdxv =
1. Rappels et notations
3. Cas d’un déplacement sinusoïdal
déplacement x(t) )0...cos(2.oXx(t) φπ += tf
)0..sin(2.)0...sin(2.oX..2.v(t) φπφππ +=+−= tfoVtffvitesse v(t)
)0..(2.c)0...cos(2.oX.2.24.a(t) φπφππ +=+−= tfosoAtffaccélération a(t)
2. l’ unité d’accélération pratique (g) 1 g = 9,807ms-2 10 ms-2 = 1,02 g
13
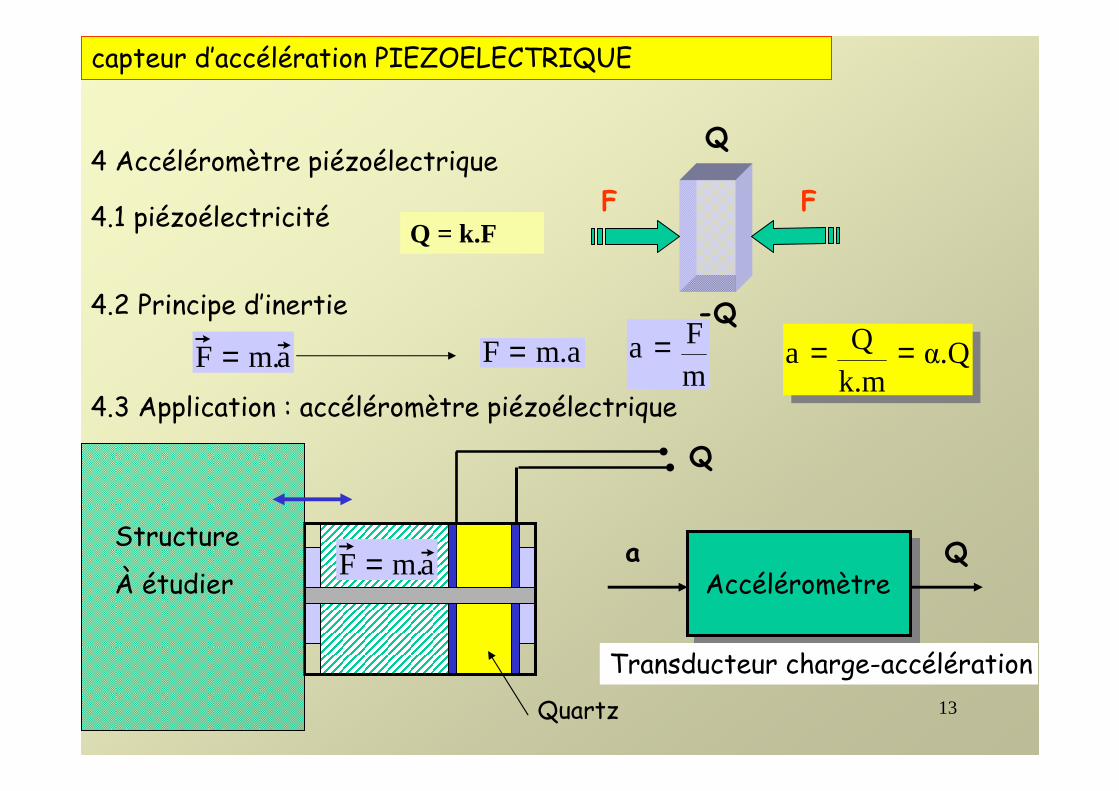
capteur d’accélération PIEZOELECTRIQUE
4 Accéléromètre piézoélectrique
am.F =Structure
À étudier
Quartz
Q
4.3 Application : accéléromètre piézoélectrique
AccéléromètreQa
Transducteur charge-accélération
4.1 piézoélectricité
Q
-Q
FF
4.2 Principe d’inertie
am.F =
Q = k.F
m.aF =mFa = α.Q
k.mQa ==
14
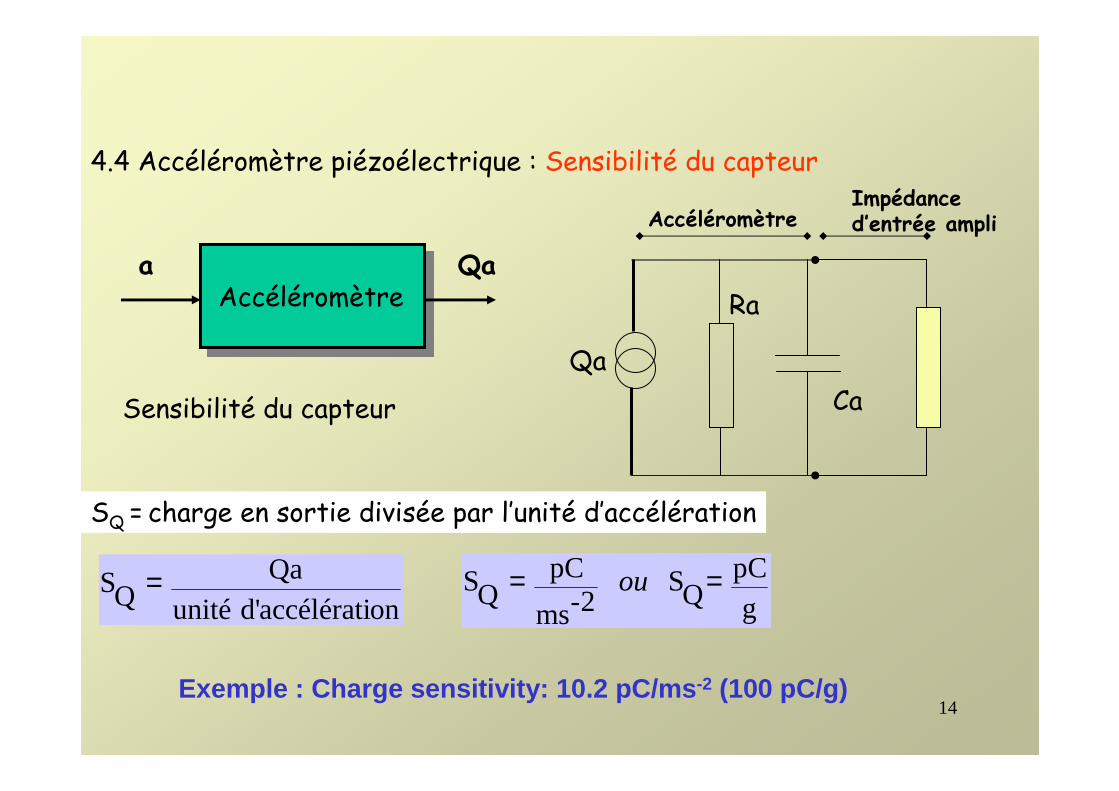
4.4 Accéléromètre piézoélectrique : Sensibilité du capteur
AccéléromètreQaa
Sensibilité du capteur
Qa
Ra
Ca
AccéléromètreImpédance d’entrée ampli
SQ = charge en sortie divisée par l’unité d’accélération
onaccélératid'unitéQa
QS =g
pCQS
2-ms
pCQS == ou
Exemple : Charge sensitivity: 10.2 pC/ms -2 (100 pC/g)
15
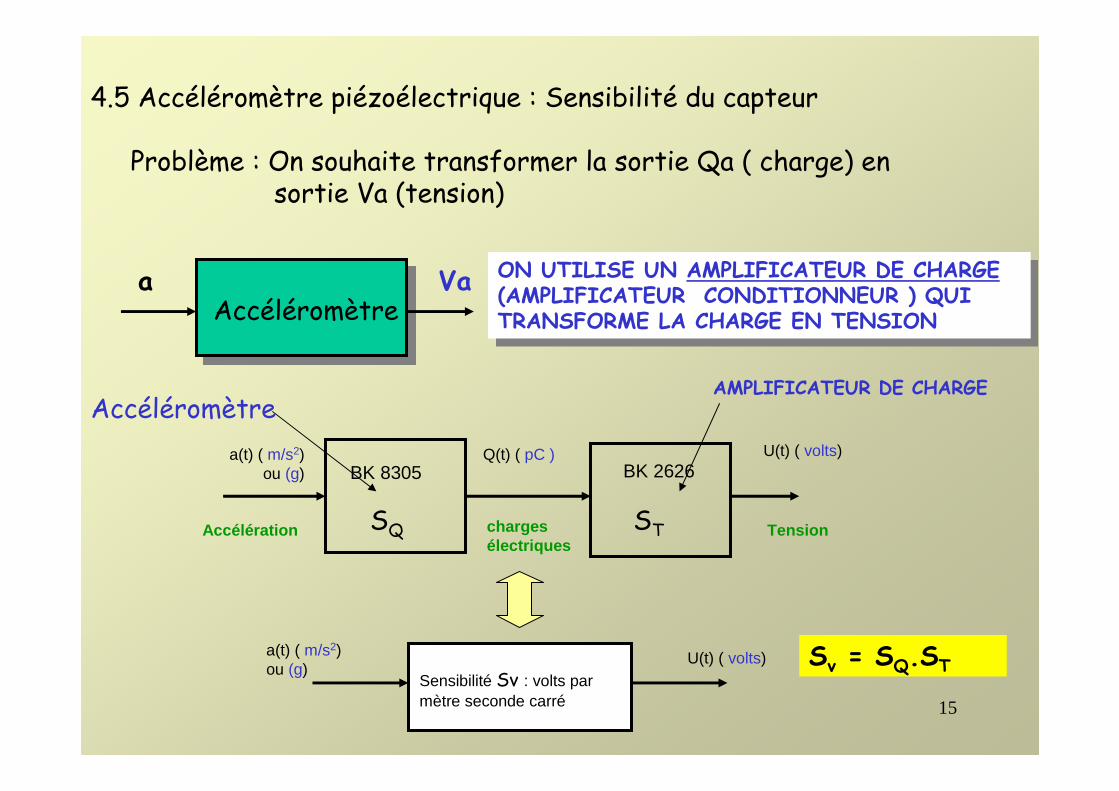
4.5 Accéléromètre piézoélectrique : Sensibilité du capteur
VaaAccéléromètre
Problème : On souhaite transformer la sortie Qa ( charge) en sortie Va (tension)
ON UTILISE UN AMPLIFICATEUR DE CHARGE(AMPLIFICATEUR CONDITIONNEUR ) QUI TRANSFORME LA CHARGE EN TENSION
ON UTILISE UN AMPLIFICATEUR DE CHARGE(AMPLIFICATEUR CONDITIONNEUR ) QUI TRANSFORME LA CHARGE EN TENSION
a(t) ( m/s2) ou (g)
U(t) ( volts)
Tension
a(t) ( m/s2) ou (g)
Q(t) ( pC ) U(t) ( volts)
Accélération chargesélectriques
BK 2626BK 8305
SQ ST
AMPLIFICATEUR DE CHARGEAccéléromètre
Sensibilité Sv : volts par mètre seconde carré
Sv = SQ.ST
16
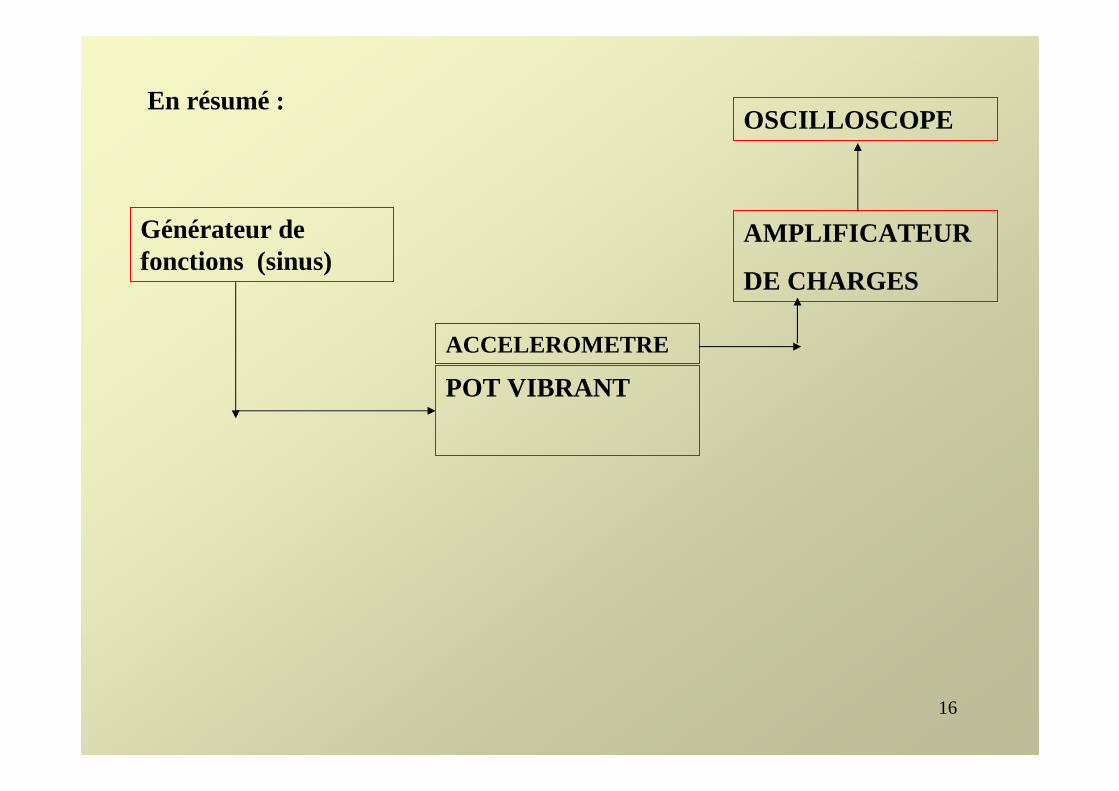
En résumé :
Générateur de fonctions (sinus)
POT VIBRANT
ACCELEROMETRE
AMPLIFICATEUR
DE CHARGES
OSCILLOSCOPE
17
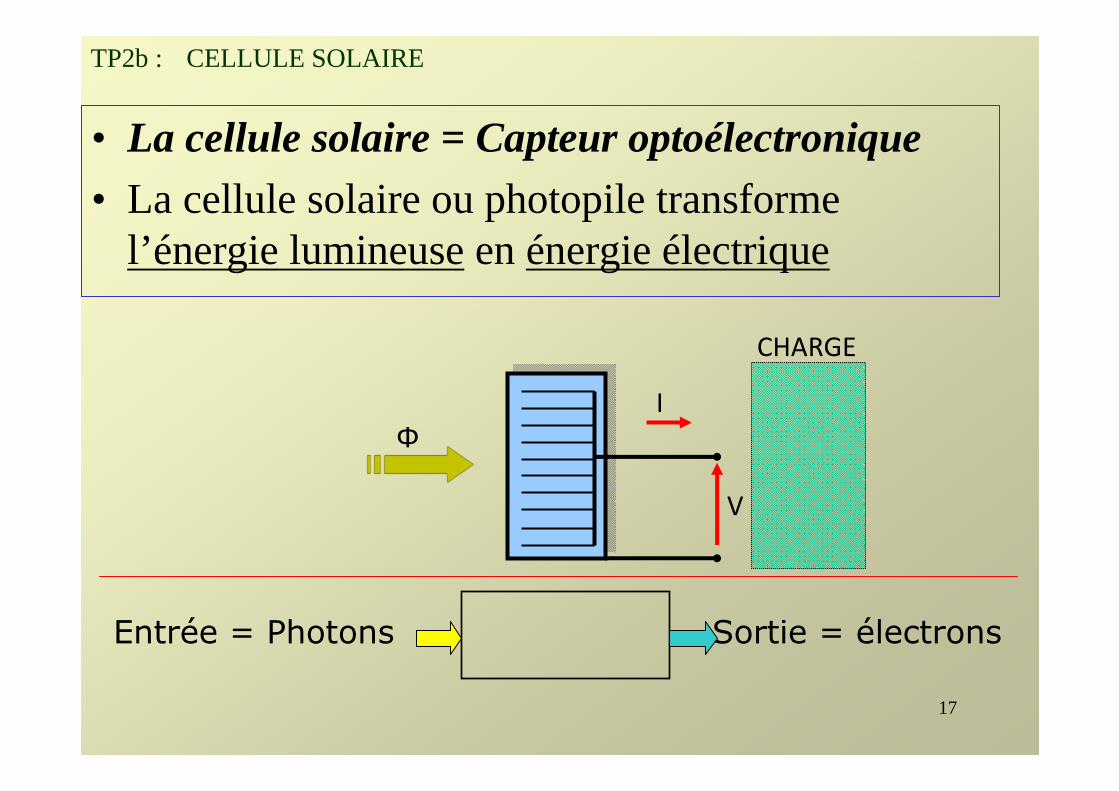
TP2b : CELLULE SOLAIRE
• La cellule solaire = Capteur optoélectronique
• La cellule solaire ou photopile transforme l’énergie lumineuseen énergie électrique
ΦI
V
CHARGE
Entrée = Photons Sortie = électrons
18
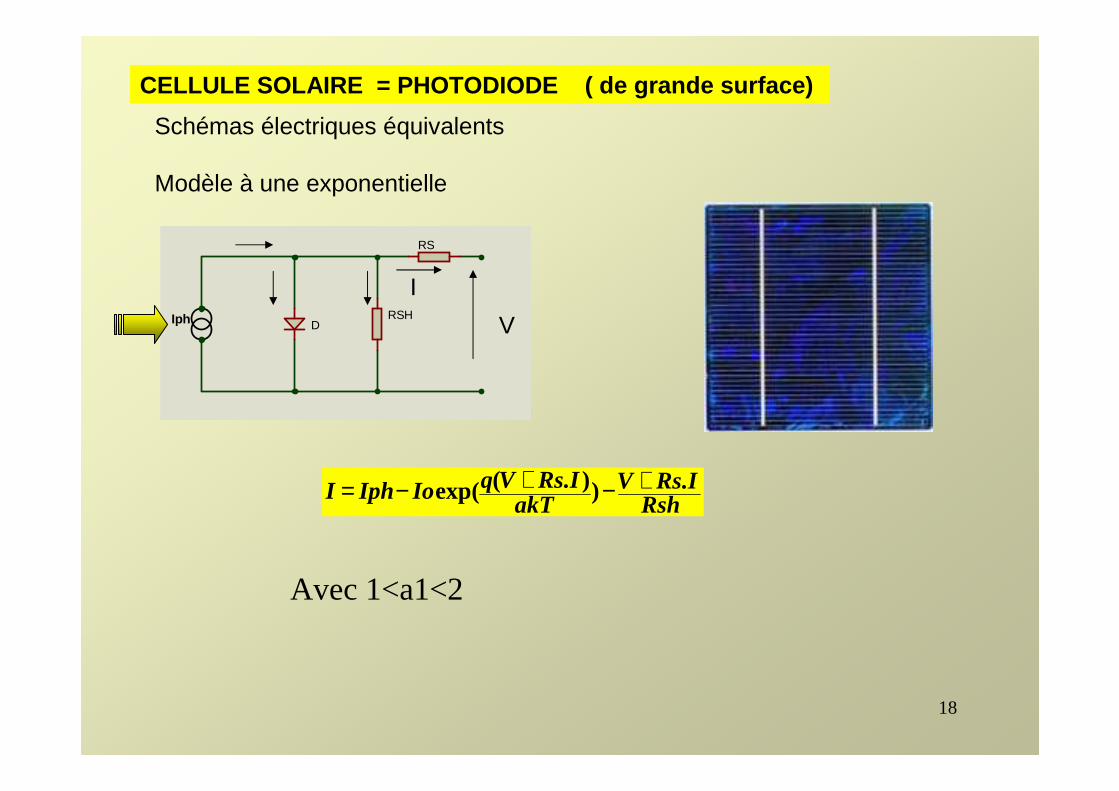
CELLULE SOLAIRE = PHOTODIODE ( de grande surfac e)
Schémas électriques équivalents
Modèle à une exponentielle
DRSH
RS
Iph V
I
RshIRsV
akTIRsVqIoIphI .)).(exp( +−+−=
Avec 1<a1<2
19
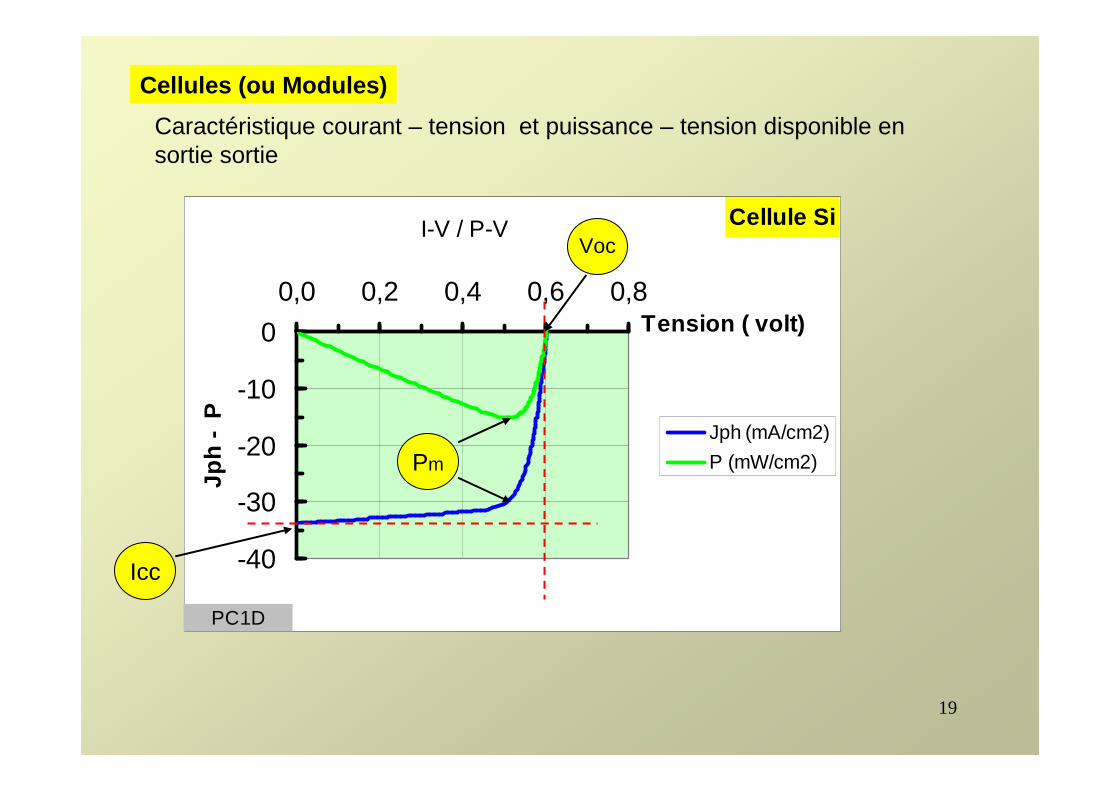
Caractéristique courant – tension et puissance – tension disponible en sortie sortie
Cellule Si
-40
-30
-20
-10
0
0,0 0,2 0,4 0,6 0,8Tension ( volt)
Jph
- P
Jph (mA/cm2)
P (mW/cm2)
PC1D
I-V / P-V
Icc
Voc
Pm
Cellules (ou Modules)
20
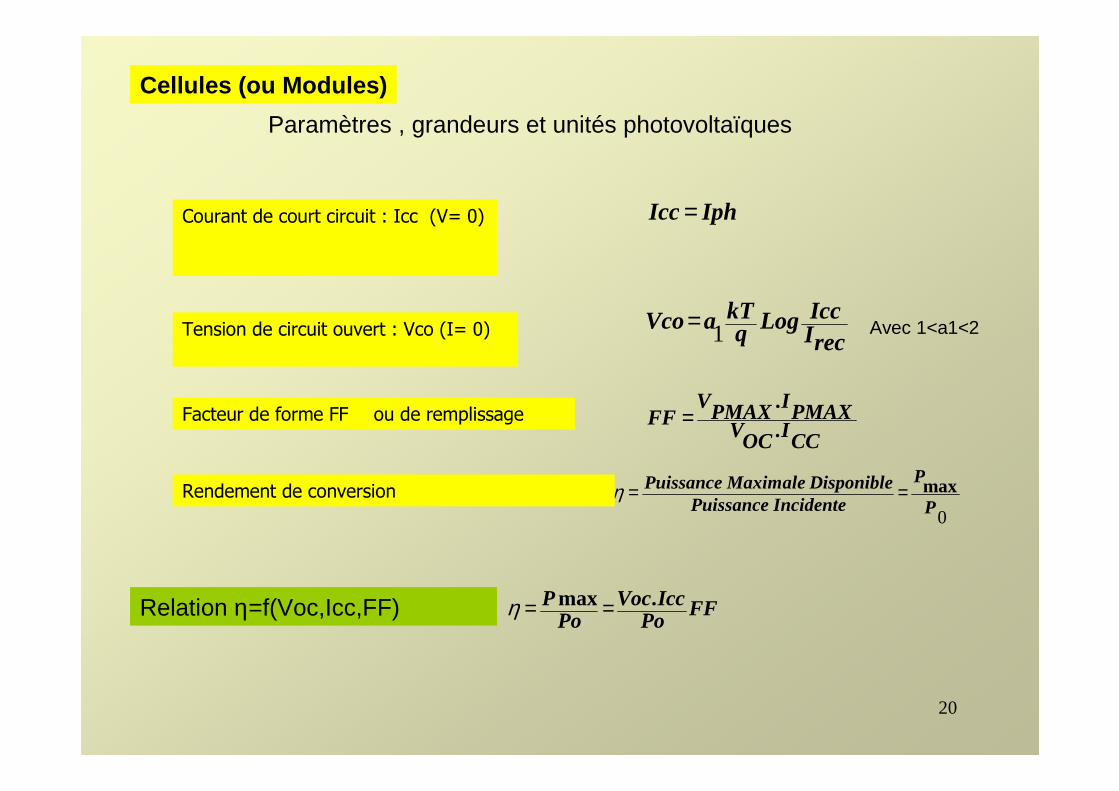
Cellules (ou Modules)
Paramètres , grandeurs et unités photovoltaïques
IphIcc =Courant de court circuit : Icc (V= 0)
CCIOCVPMAXIPMAXV
FF..
=Facteur de forme FF ou de remplissage
0P
P
IncidentePuissanceDisponibleMaximalePuissance max==ηRendement de conversion
recIIccLogq
kTaVco 1=Tension de circuit ouvert : Vco (I= 0) Avec 1<a1<2
FFPo
IccVocPo
P .max ==ηRelation η=f(Voc,Icc,FF)
21
PREPA TP _ METROLOGIE_CAPTEURS
ETUDE DES MODES DE VIBRATIONS D’ UNE BARRE ENCASTREE
Objectifs du TP
1. Etude de la propagation d’une onde élastique
2. Mise en évidence du phénomène d’ondes stationnaires
3. Mesure des fréquences caractéristiques ( mode de vibration)
4. Application à la résistance des matériaux :détermination du module de YOUNG des barres étudiées
22
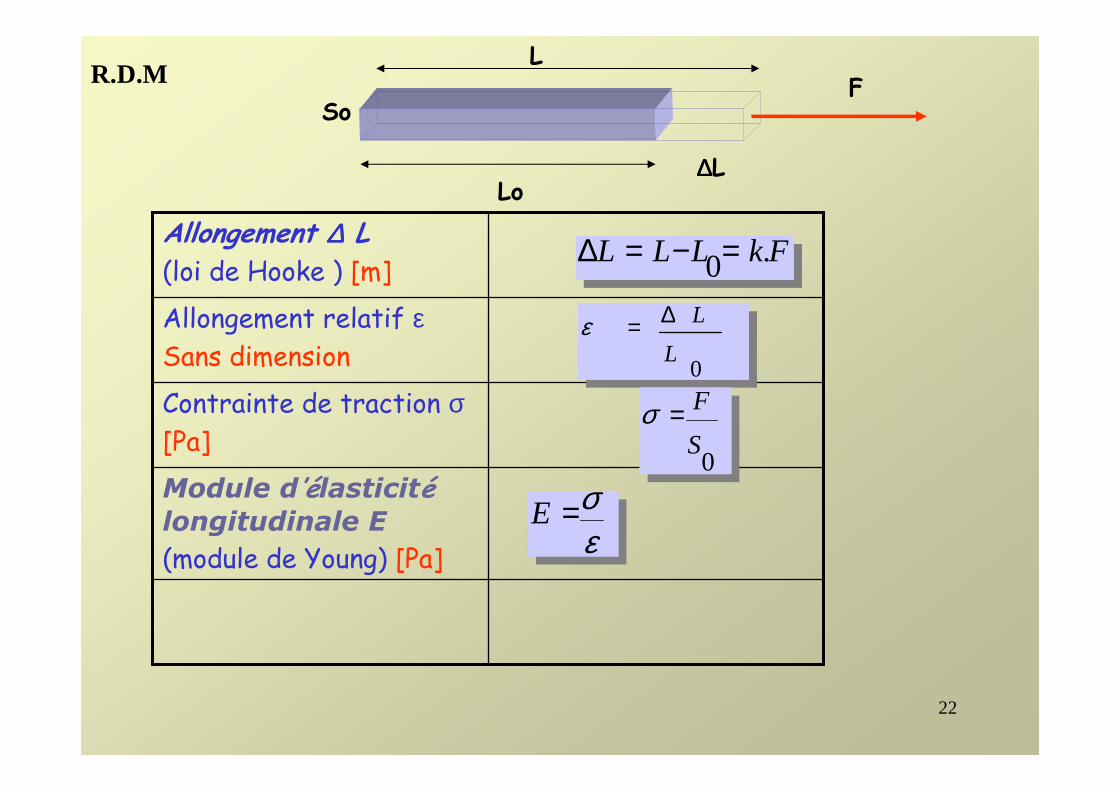
Module d’élasticitélongitudinale E
(module de Young) [Pa]
Contrainte de traction σ[Pa]
Allongement relatif εSans dimension
Allongement ∆∆∆∆ L(loi de Hooke ) [m]
FkLLL .0=−=∆
0L
L∆=ε
0S
F=σ
εσ=E
Lo
L
∆∆∆∆L
FSo
R.D.M
23
PREPA TP _ METROLOGIE_CAPTEURS
ETUDE DES MODES DE VIBRATIONS D’ UNE BARRE ENCASTREE
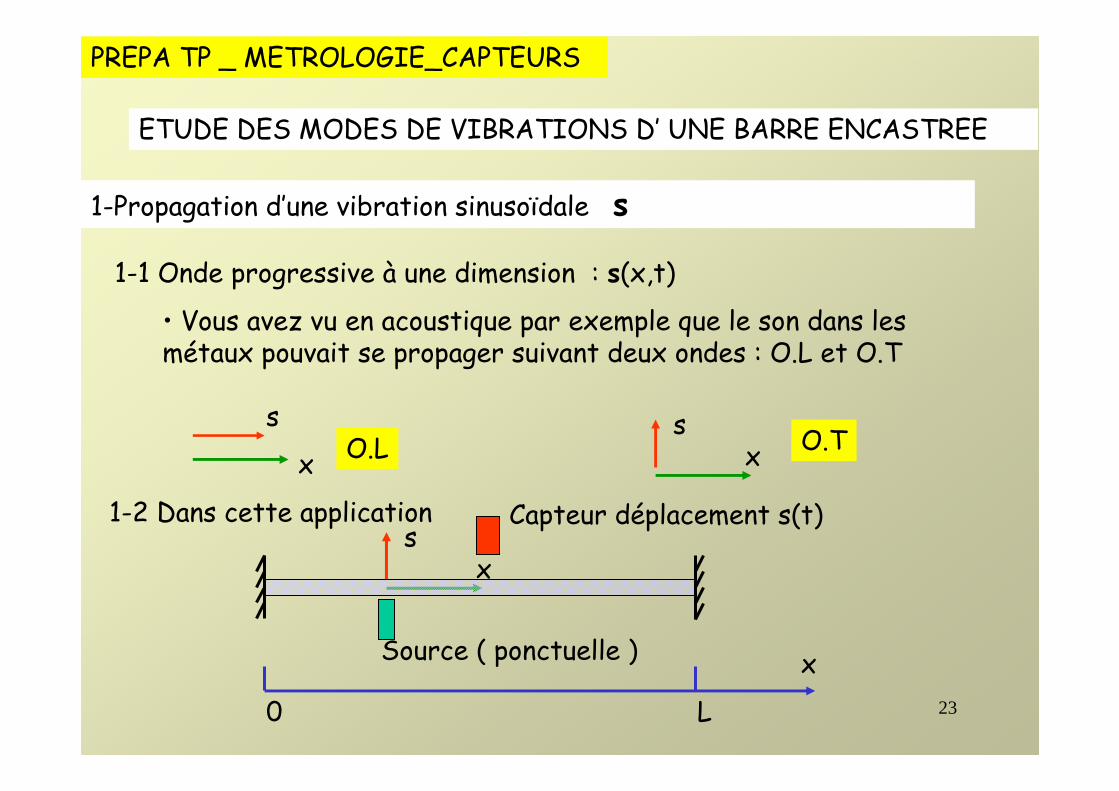
1-Propagation d’une vibration sinusoïdale s
1-1 Onde progressive à une dimension : s(x,t)
• Vous avez vu en acoustique par exemple que le son dans les métaux pouvait se propager suivant deux ondes : O.L et O.T
x
sO.L
1-2 Dans cette application
O.Txs
xs
Source ( ponctuelle ) x
L0
Capteur déplacement s(t)
24
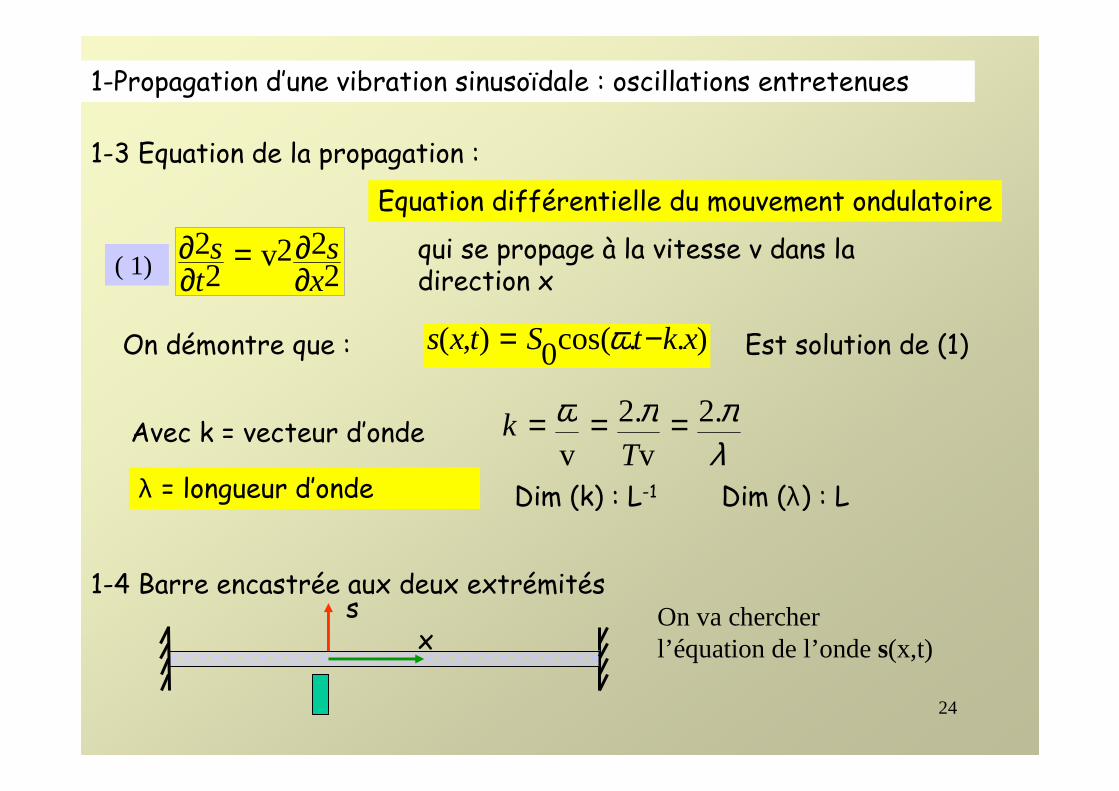
1-Propagation d’une vibration sinusoïdale : oscillations entretenues
1-3 Equation de la propagation :
222v
22
xs
ts
∂∂=
∂∂
Equation différentielle du mouvement ondulatoire
On démontre que : )..cos(0),( xktStxs −= ω
( 1)
Est solution de (1)
Avec k = vecteur d’ondeλππω .2
v.2
v===
Tk
qui se propage à la vitesse v dans la direction x
λ = longueur d’onde Dim (k) : L-1 Dim (λ) : L
1-4 Barre encastrée aux deux extrémités
xs On va chercher
l’équation de l’onde s(x,t)
25
siM
sr
x
L0 x
Source
O O’
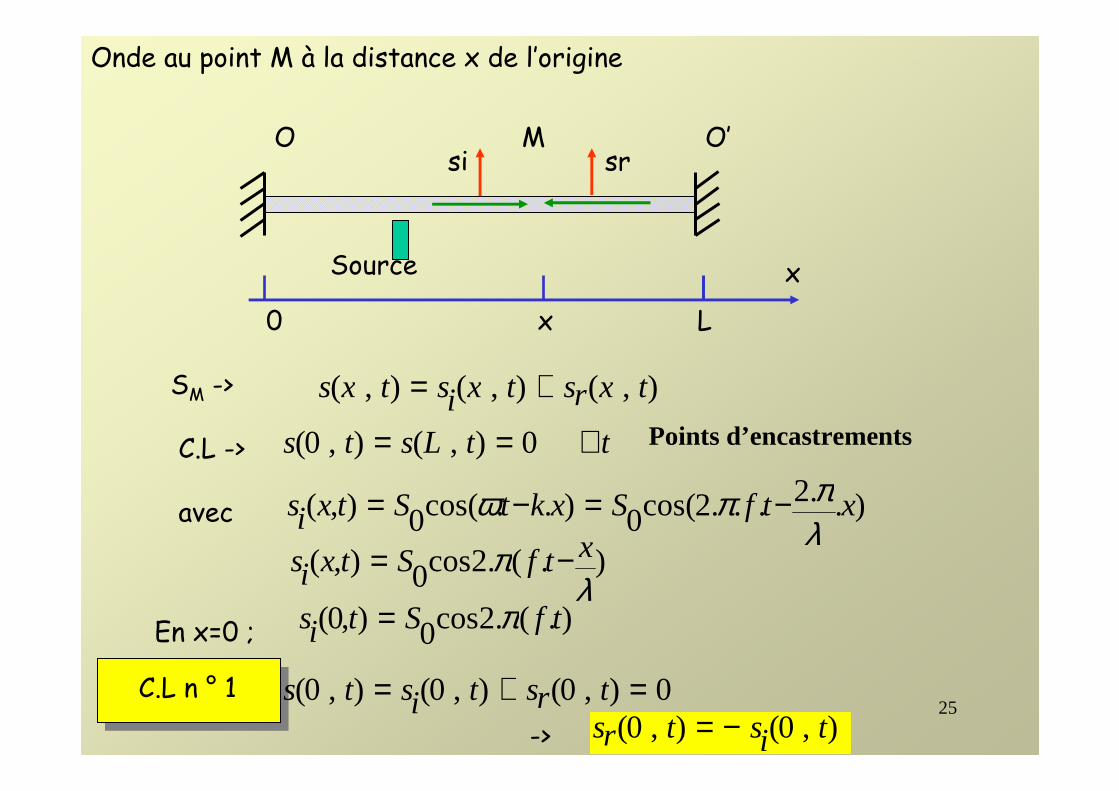
Onde au point M à la distance x de l’origine
),(),(),( txrstxistxs +=SM ->
ttLsts ∀== 0),(),0(C.L ->
)..2...2cos(0)..cos(0),( xtfSxktStxis λππω −=−=avec
).(.2cos0),(λ
π xtfStxis −=
).(.2cos0),0( tfStis π=
C.L n ° 1
En x=0 ;
0),0(),0(),0( =+= trstists),0(),0( tistrs −=->
Points d’encastrements
26
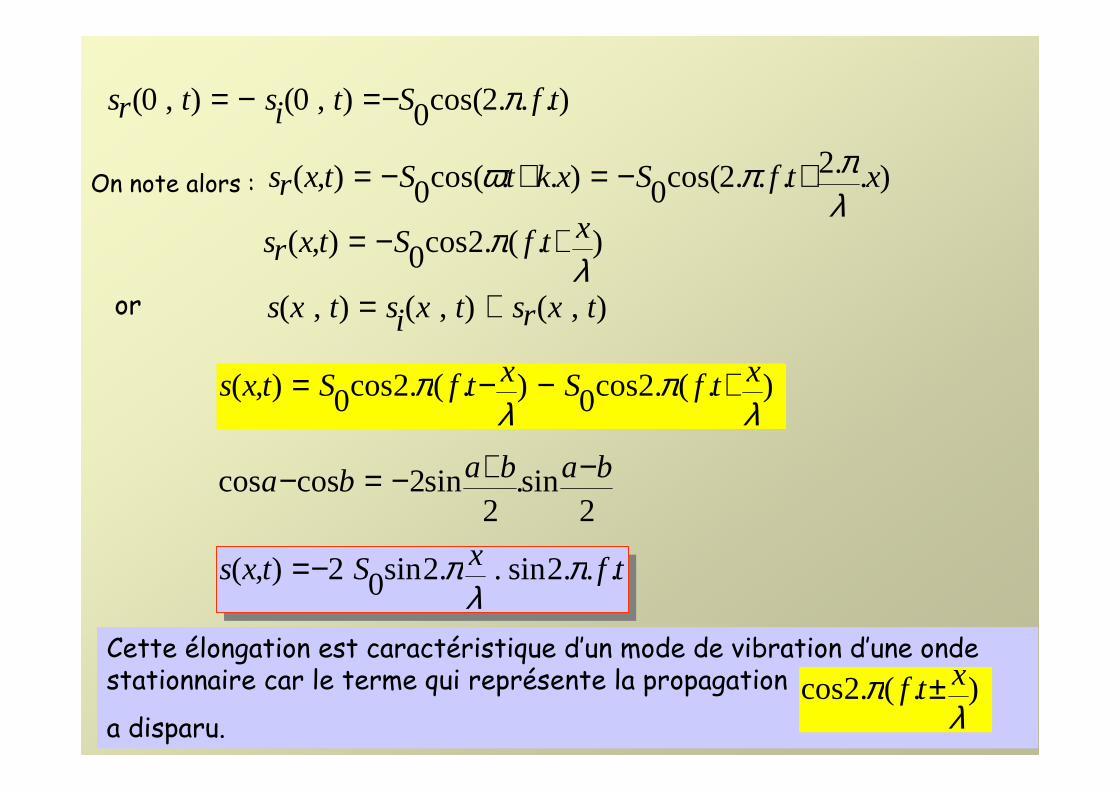
)...2cos(0),0(),0( tfStistrs π−=−=
On note alors : )..2...2cos(0)..cos(0),( xtfSxktStxrs λππω +−=+−=
).(.2cos0),(λ
π xtfStxrs +−=
),(),(),( txrstxistxs +=or
).(.2cos0).(.2cos0),(λ
πλ
π xtfSxtfStxs +−−=
2sin.
2sin2coscos bababa −+−=−
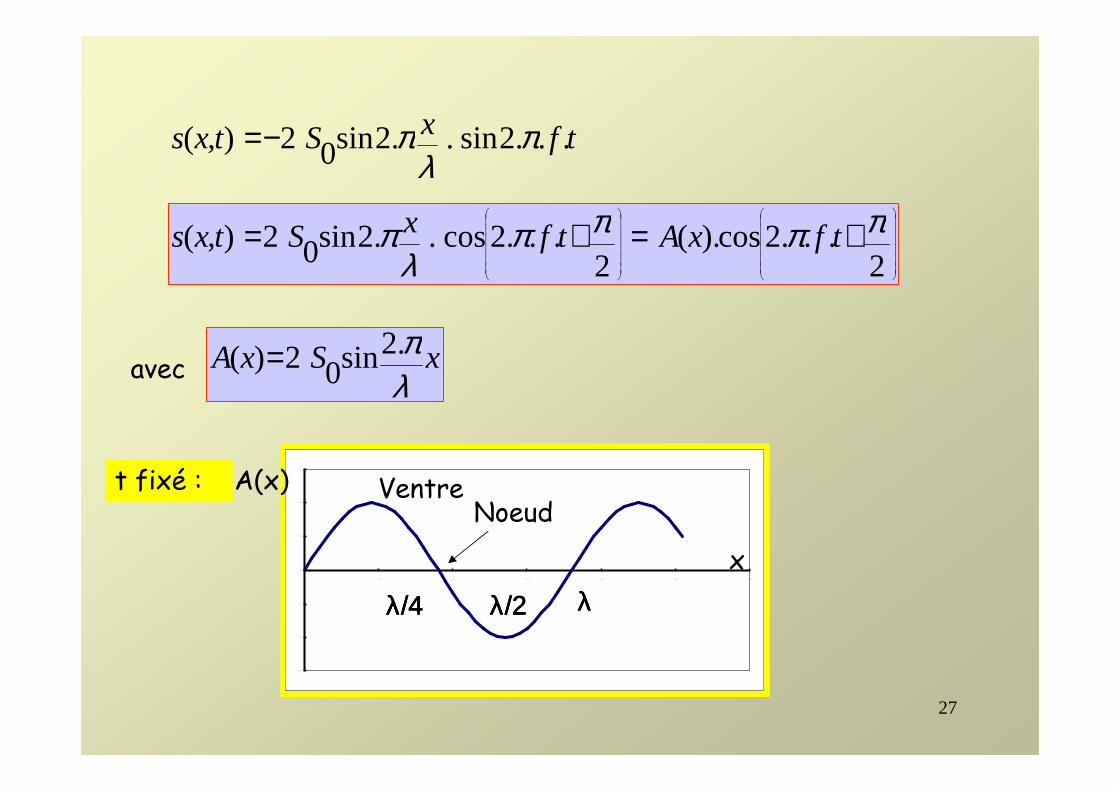
tfxStxs ...2sin..2sin02),( πλ
π−=
Cette élongation est caractéristique d’un mode de vibration d’une onde stationnaire car le terme qui représente la propagation
a disparu.).(.2cos
λπ xtf ±
27
tfxStxs ...2sin..2sin02),( πλ
π−=
+=+=2
...2cos).(2
...2cos..2sin02),( ππππλ
π tfxAtfxStxs
avec xSxAλπ.2sin02)( =
-1 ,5
-1 ,0
-0 ,5
0 ,0
0 ,5
1 ,0
1 ,5
0 1 0 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0
A(x)
λλλλλ/2λ/2λ/2λ/2λ/4λ/4λ/4λ/4
VentreNoeud
x
t fixé :
28
C.L n ° 2
C.L n ° 2
xs
x
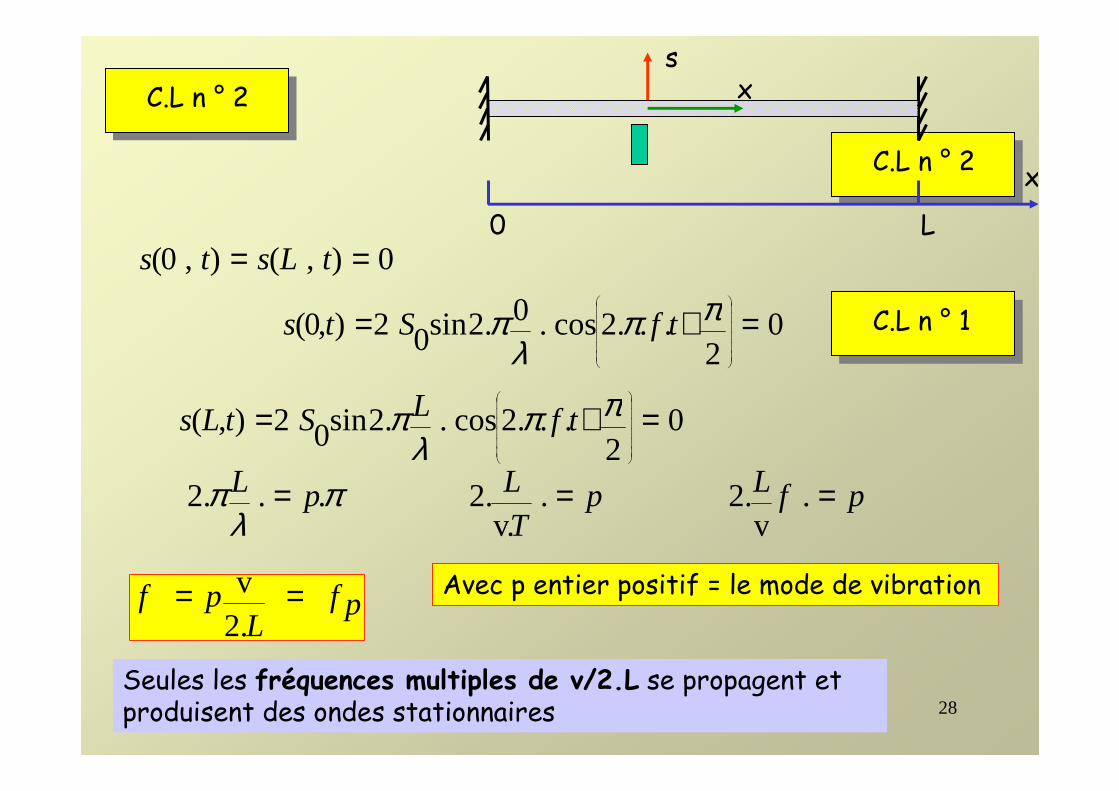
L00),(),0( == tLsts
02
...2cos.0.2sin02),0( =+=
ππλ
π tfSts
02
...2cos..2sin02),( =+=
ππλ
π tfLStLs
C.L n ° 1
πλ
π ...2 pL = pT
L =..v
.2 pfL =.v
.2
pfL
pf ==.2v Avec p entier positif = le mode de vibration
Seules les fréquences multiples de v/2.L se propagent et produisent des ondes stationnaires
29
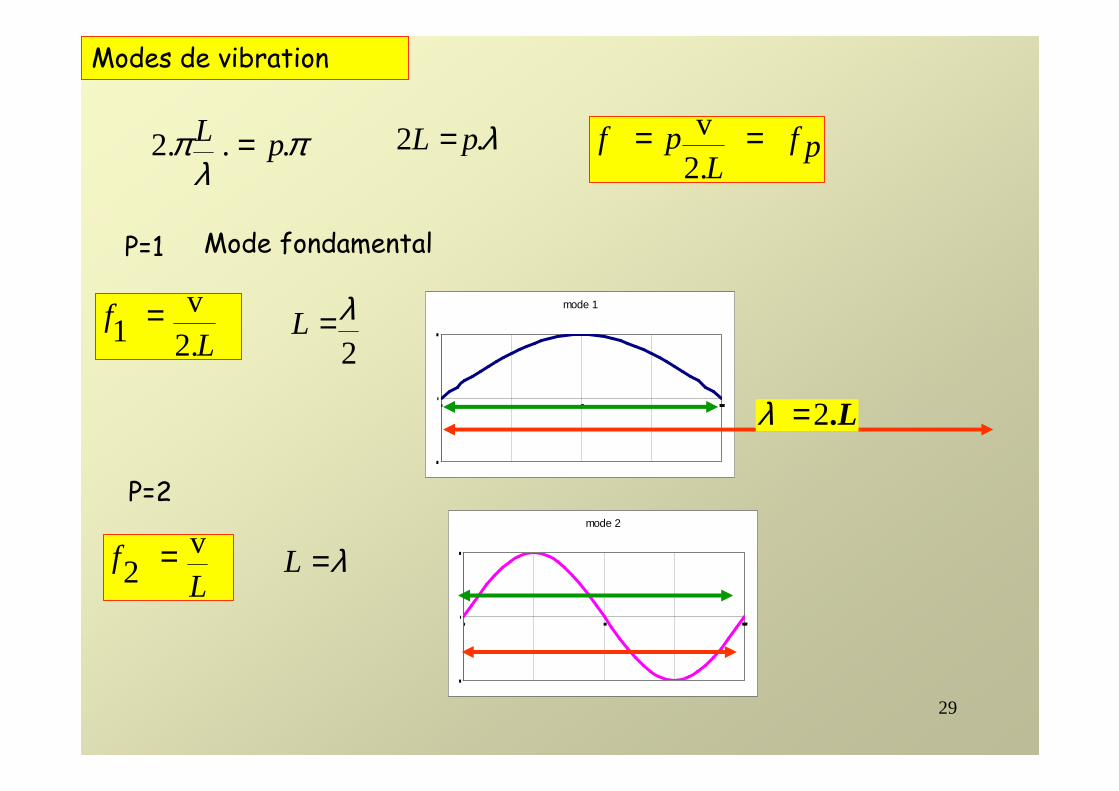
λ.2 pL =
Modes de vibration
πλ
π ...2 pL = pfL
pf ==.2v
P=1 Mode fondamental
Lf
.2v
1 =2λ=L
P=2
Lf v2 = λ=L
mode 1
-1
0
1
0 9 0 1 8 0
L.2=λ
mode 2
-1
0
1
0 9 0 1 8 0
30
mode 1
-1
0
1
0 9 0 1 8 0
mode 2
-1
0
1
0 9 0 1 8 0
mode 3
-1
0
1
0 9 0 1 8 0
mode 5
-1
0
1
0 9 0 1 8 0
mode 4
-1
0
1
0 9 0 1 8 0
mode 6
-1
0
1
0 9 0 1 8 0
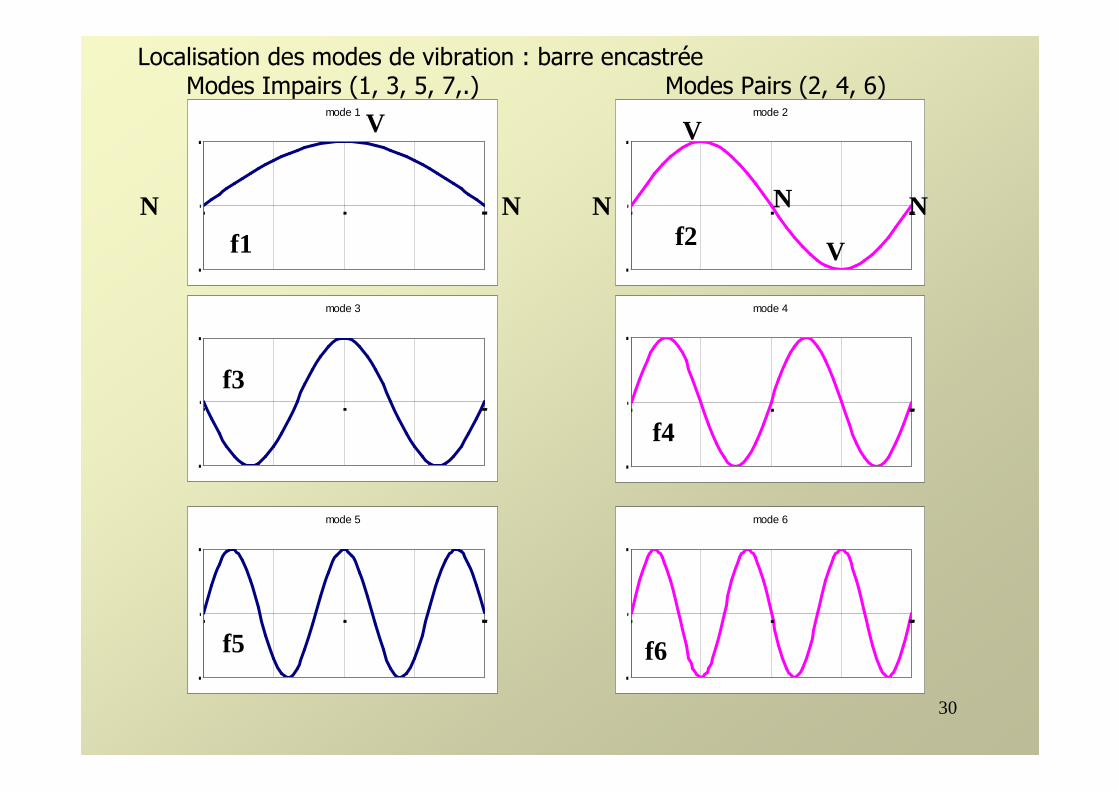
Localisation des modes de vibration : barre encastréeModes Impairs (1, 3, 5, 7,.) Modes Pairs (2, 4, 6)
f1 f2
f3
f5
f4
f6
V
NN
V
V
N N N
31
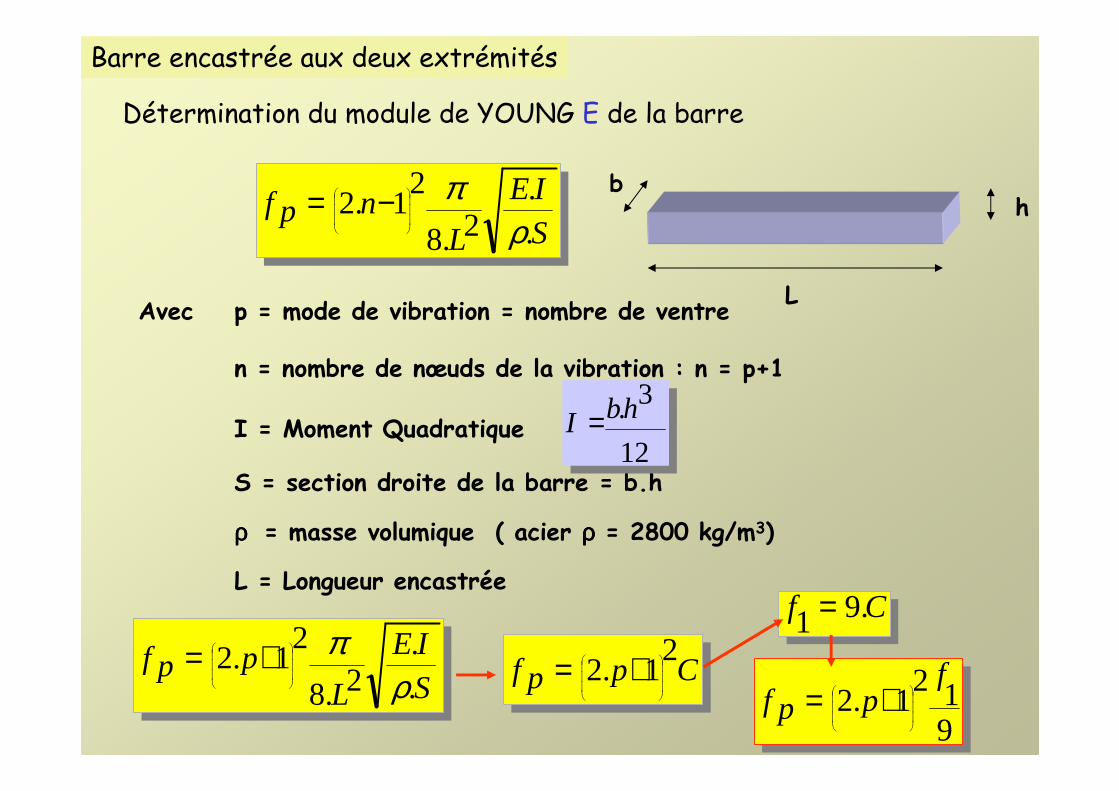
Détermination du module de YOUNG E de la barre
S
IE
Lnpf
..
2.8
21.2
ρπ
−=
Avec p = mode de vibration = nombre de ventre
n = nombre de nœuds de la vibration : n = p+1
I = Moment Quadratique
S = section droite de la barre = b.h
ρ ρ ρ ρ = masse volumique ( acier ρρρρ = 2800 kg/m3)
L = Longueur encastrée
hb
L
12
3.hbI =
Barre encastrée aux deux extrémités
S
IE
Lppf
..
2.8
21.2
ρπ
+= Cppf2
1.2
+=
Cf .91 =
912
1.2f
ppf
+=
32
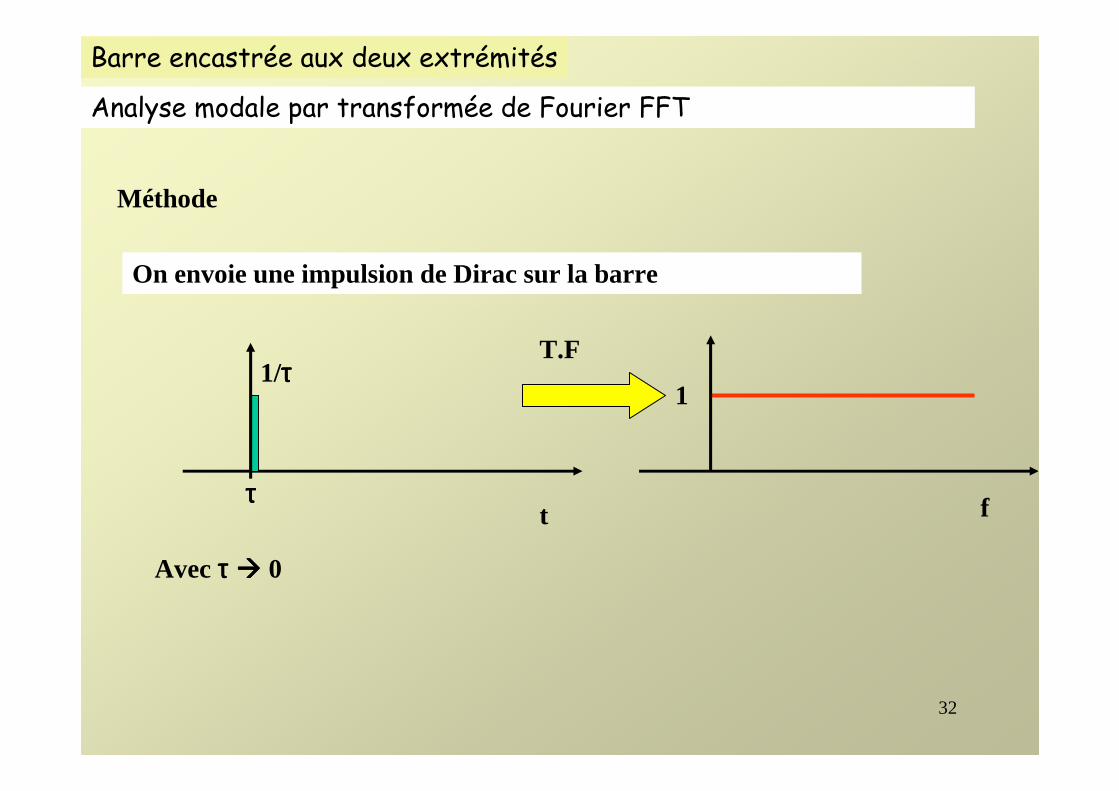
Méthode
On envoie une impulsion de Dirac sur la barre
t
1/ττττ
ττττ
Avec ττττ ���� 0
T.F
1
f
Barre encastrée aux deux extrémités
Analyse modale par transformée de Fourier FFT
33
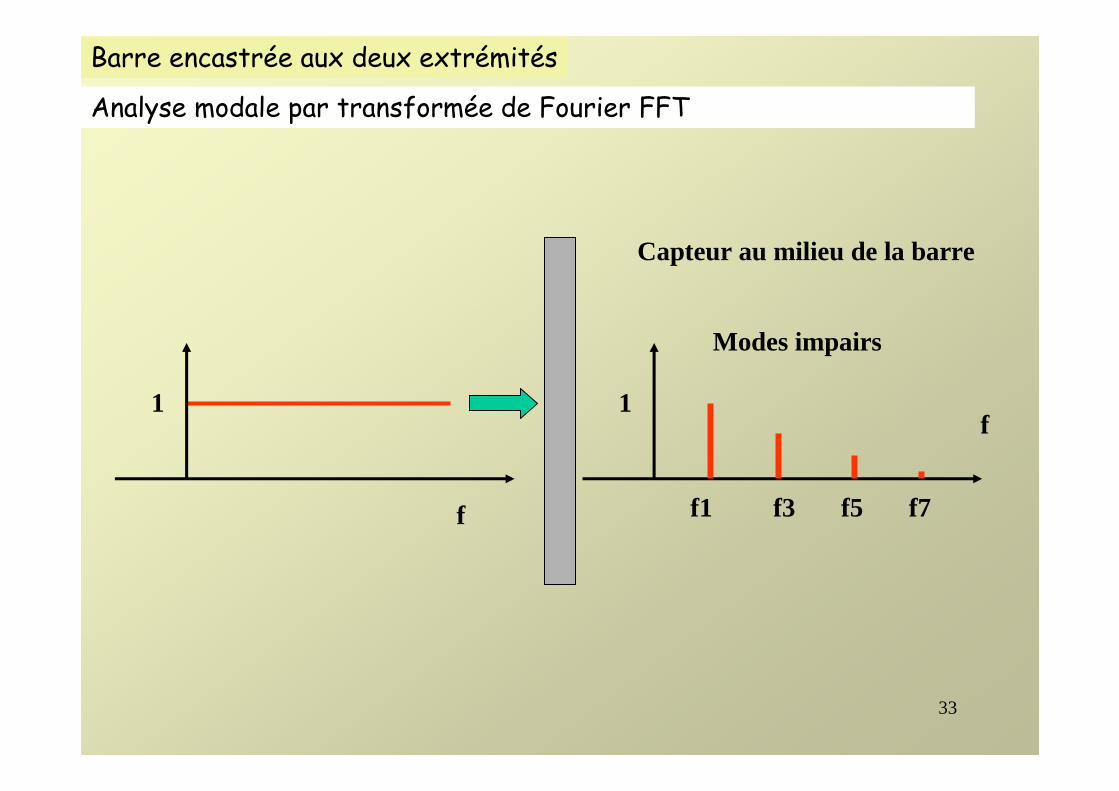
1
f
Capteur au milieu de la barre
1f
Modes impairs
f1 f3 f5 f7
Barre encastrée aux deux extrémités
Analyse modale par transformée de Fourier FFT
34
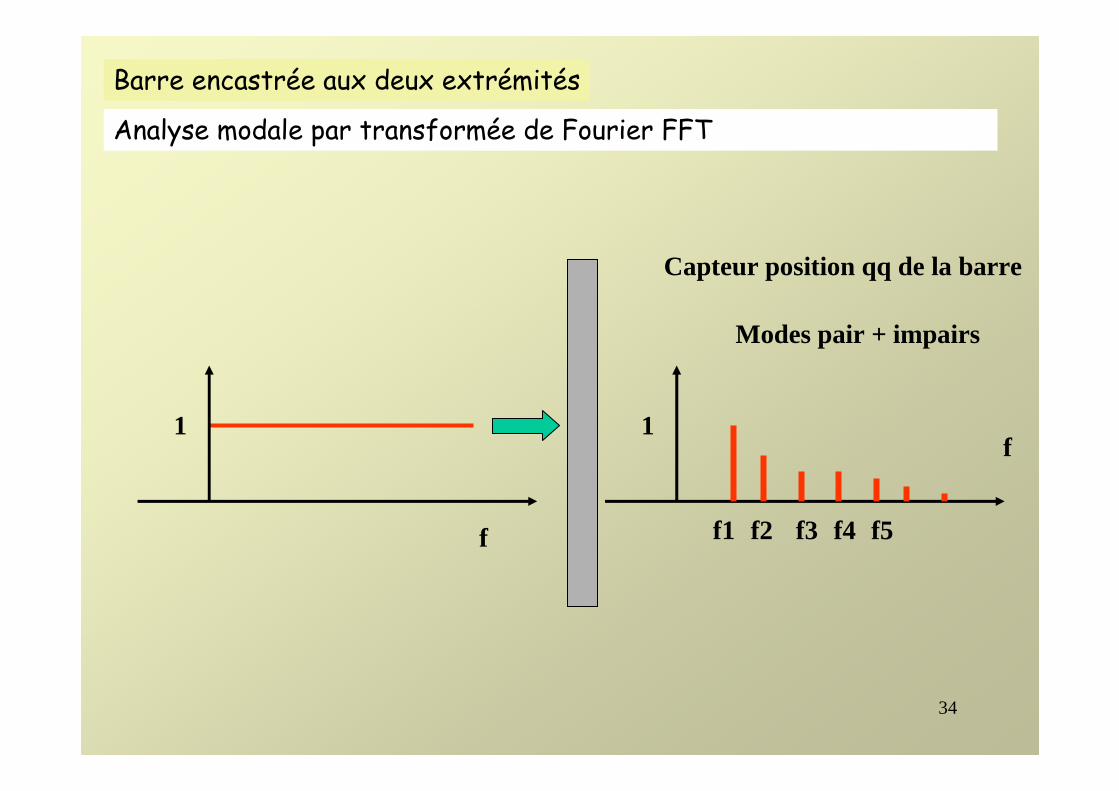
1
f
Capteur position qq de la barre
1f
Modes pair + impairs
f1 f2 f3 f5
Barre encastrée aux deux extrémités
Analyse modale par transformée de Fourier FFT
f4
35
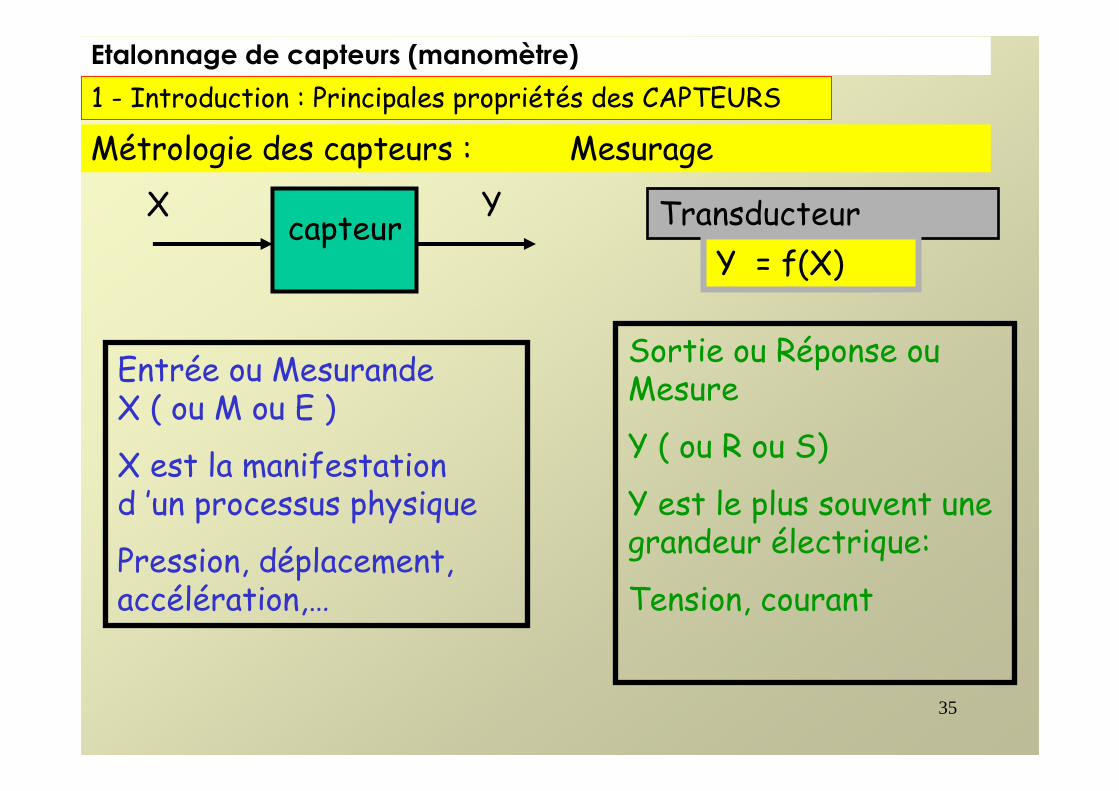
Etalonnage de capteurs (manomètre)
1 - Introduction : Principales propriétés des CAPTEURS
Entrée ou Mesurande X ( ou M ou E )
X est la manifestation d ’un processus physique
Pression, déplacement, accélération,…
Sortie ou Réponse ou Mesure
Y ( ou R ou S)
Y est le plus souvent une grandeur électrique:
Tension, courant
TransducteurYXcapteur
Métrologie des capteurs : Mesurage
Y = f(X)
36
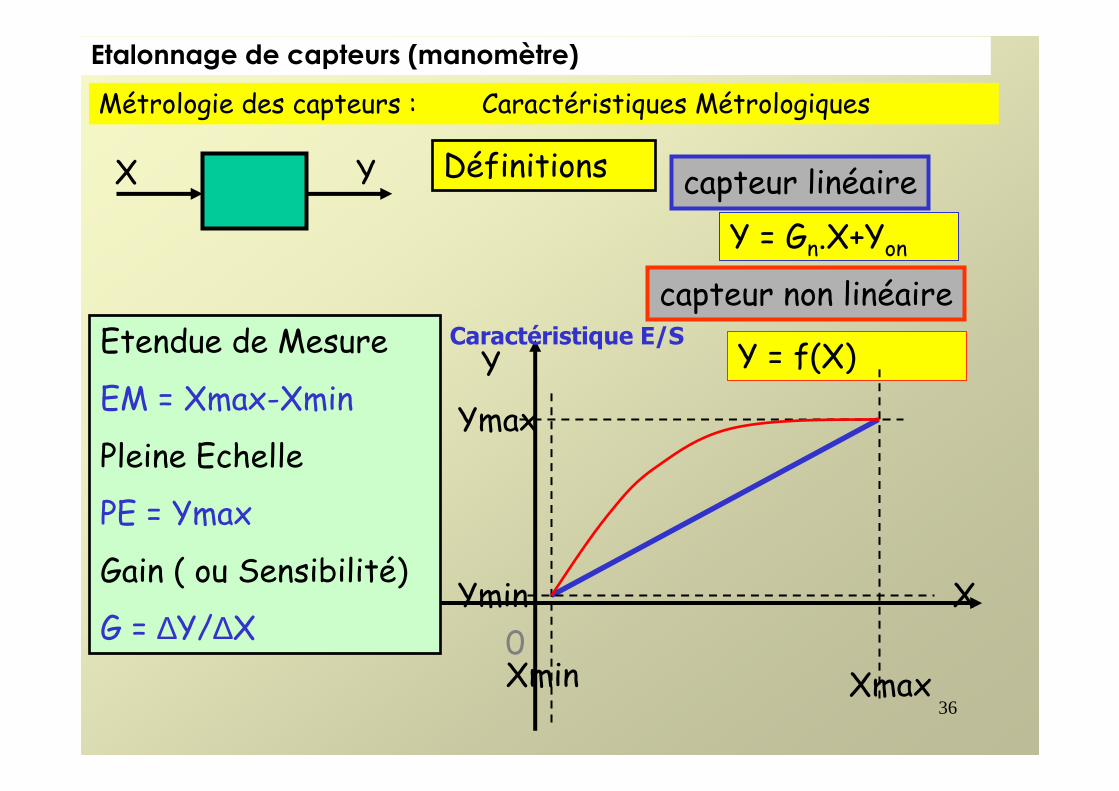
Métrologie des capteurs : Caractéristiques Métrologiques
YX
Y = Gn.X+Yon
Définitions
Etendue de Mesure
EM = Xmax-Xmin
Pleine Echelle
PE = Ymax
Gain ( ou Sensibilité)
G = ∆Y/∆X
capteur linéaire
capteur non linéaire
Y = f(X)Y
Xmin
Ymin
Ymax
0X
Xmax
Caractéristique E/S
Etalonnage de capteurs (manomètre)
37
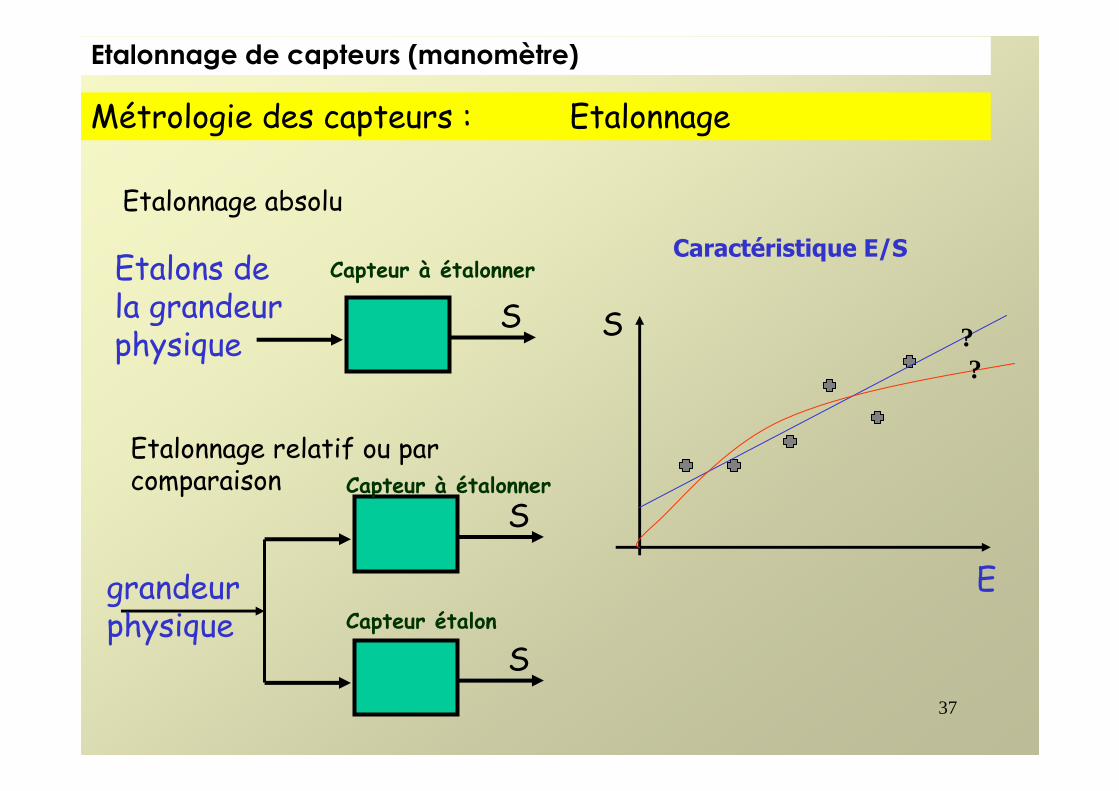
Métrologie des capteurs : Etalonnage
Etalonnage de capteurs (manomètre)
Etalonnage absolu
SEtalons de la grandeur physique S
E
Etalonnage relatif ou par comparaison
S
S
Capteur à étalonner
Capteur à étalonner
Capteur étalon
grandeur physique
Caractéristique E/S
??
38
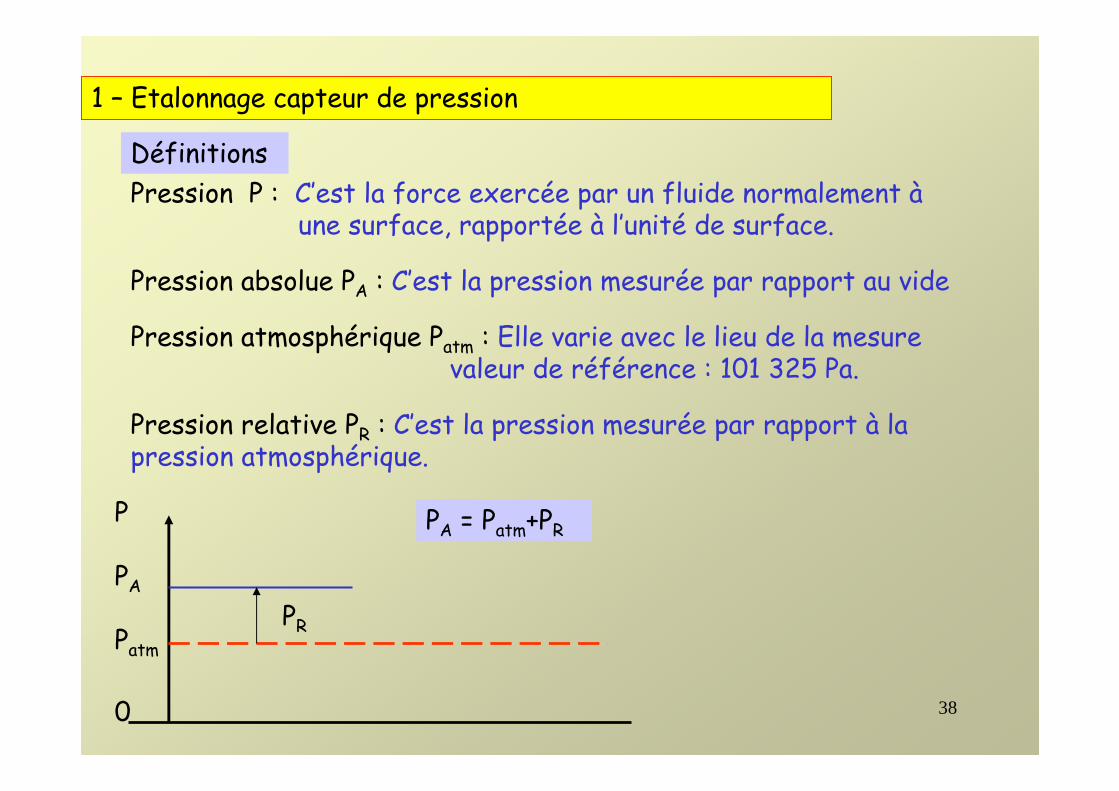
1 – Etalonnage capteur de pression
Définitions
Pression absolue PA : C’est la pression mesurée par rapport au vide
Pression atmosphérique Patm : Elle varie avec le lieu de la mesure valeur de référence : 101 325 Pa.
Pression relative PR : C’est la pression mesurée par rapport à la pression atmosphérique.
PA = Patm+PR
PA
PRPatm
P
0
Pression P : C’est la force exercée par un fluide normalement àune surface, rapportée à l’unité de surface.
39
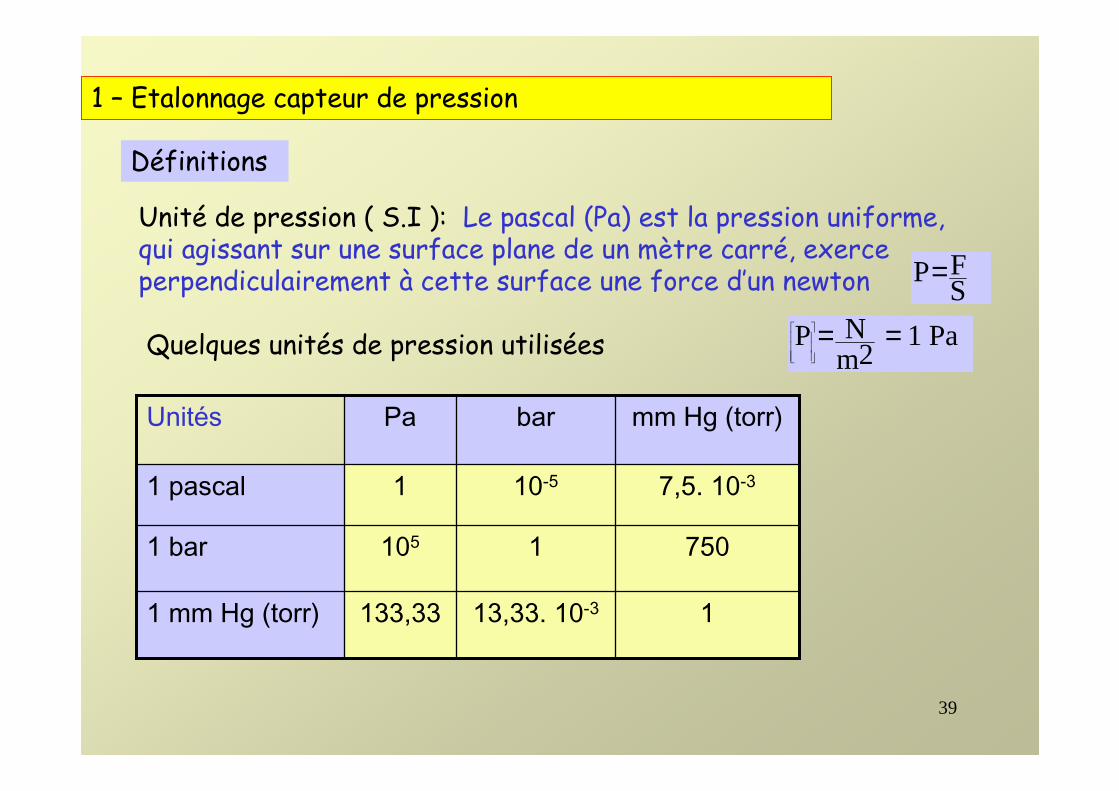
Définitions
1 – Etalonnage capteur de pression
Unité de pression ( S.I ): Le pascal (Pa) est la pression uniforme, qui agissant sur une surface plane de un mètre carré, exerce perpendiculairement à cette surface une force d’un newton
Quelques unités de pression utilisées
113,33. 10-3133,331 mm Hg (torr)
7,5. 10-310-511 pascal
75011051 bar
mm Hg (torr)barPaUnités
SFP=
Pa12m
NP ==
40
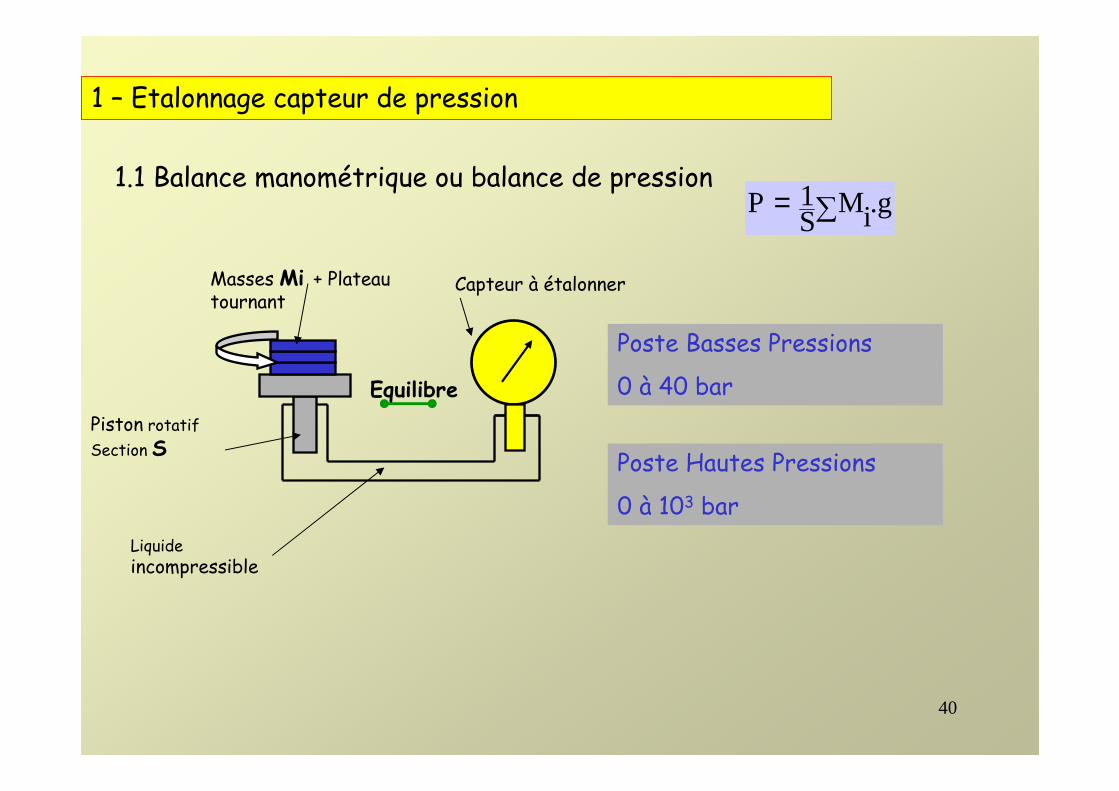
1 – Etalonnage capteur de pression
Masses Mi + Plateautournant
Piston rotatifSection S
Capteur à étalonner
Liquide incompressible
1.1 Balance manométrique ou balance de pression∑= .giM
S1P
Equilibre
Poste Basses Pressions
0 à 40 bar
Poste Hautes Pressions
0 à 103 bar
41
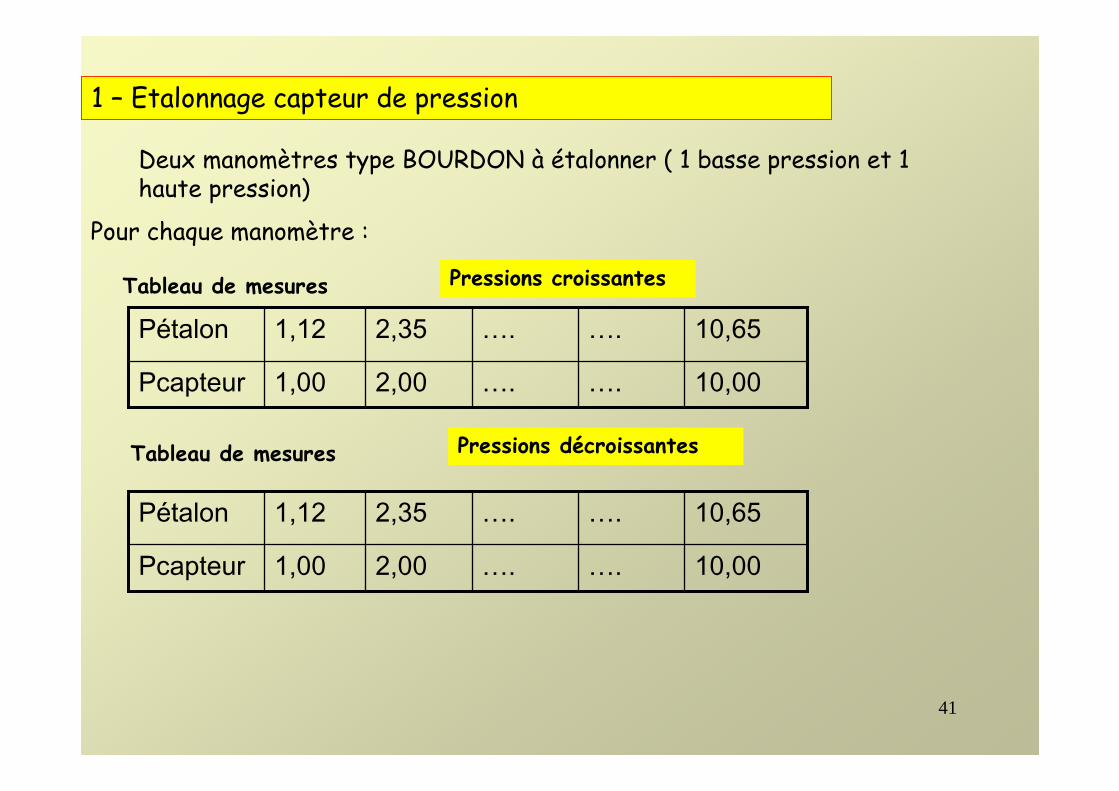
1 – Etalonnage capteur de pression
10,00….….2,001,00Pcapteur
10,65….….2,351,12PétalonTableau de mesures
Deux manomètres type BOURDON à étalonner ( 1 basse pression et 1 haute pression)
Pour chaque manomètre :
Pressions croissantes
10,00….….2,001,00Pcapteur
10,65….….2,351,12Pétalon
Tableau de mesures Pressions décroissantes
42
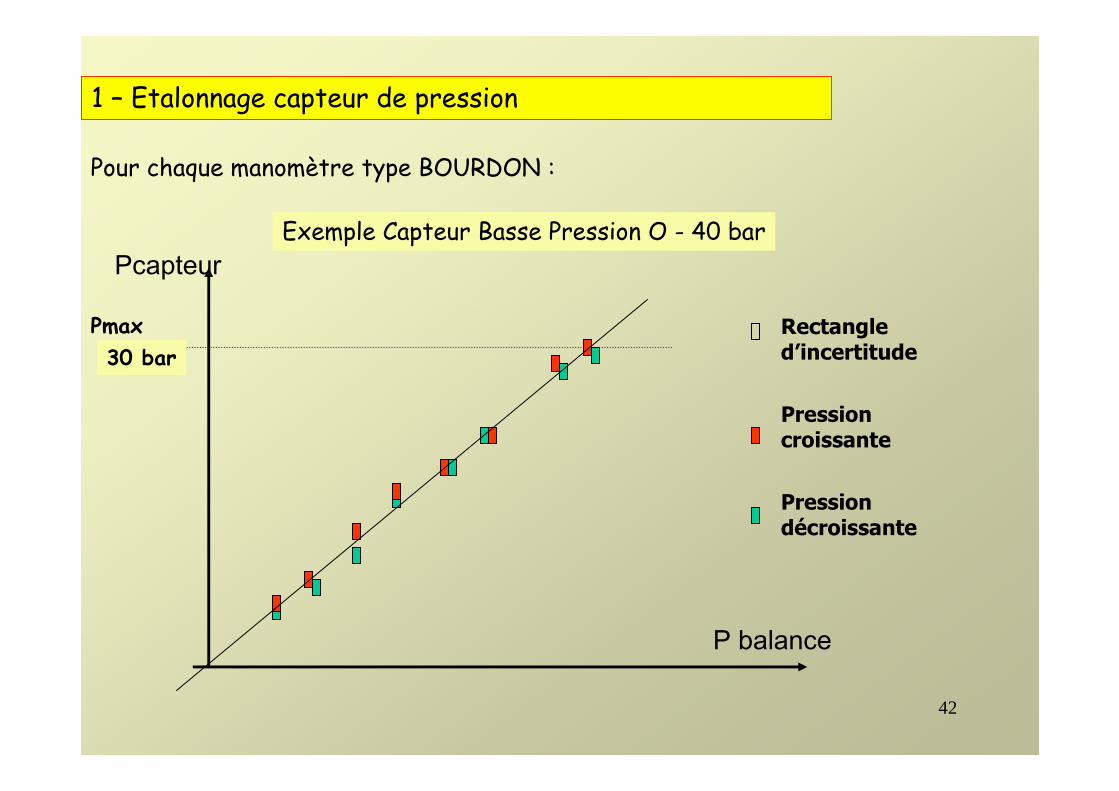
1 – Etalonnage capteur de pression
Rectangle d’incertitude
Pression croissante
Pression décroissante
P balance
Pcapteur
Pmax
Pour chaque manomètre type BOURDON :
Exemple Capteur Basse Pression O - 40 bar
30 bar
43
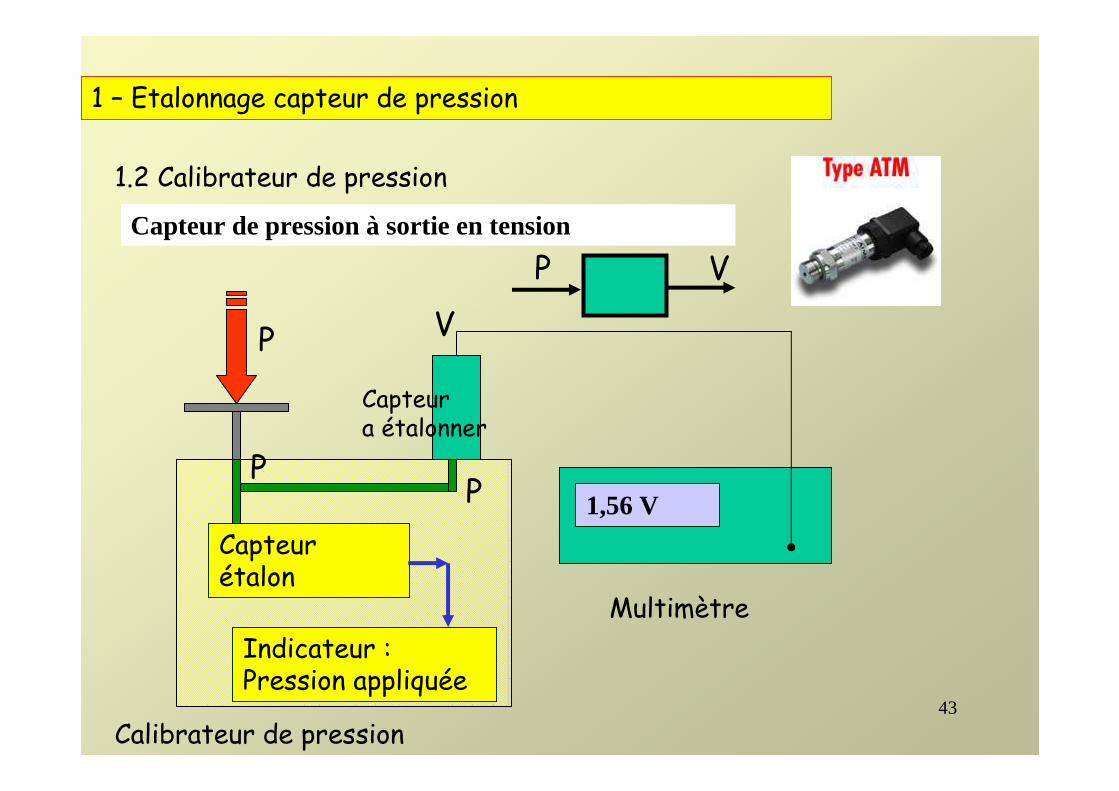
1.2 Calibrateur de pression
1 – Etalonnage capteur de pression
Capteur de pression à sortie en tension
Indicateur : Pression appliquée
Capteur étalon
Capteur a étalonner
VP
1,56 V
Calibrateur de pression
Multimètre
PP
VP
44
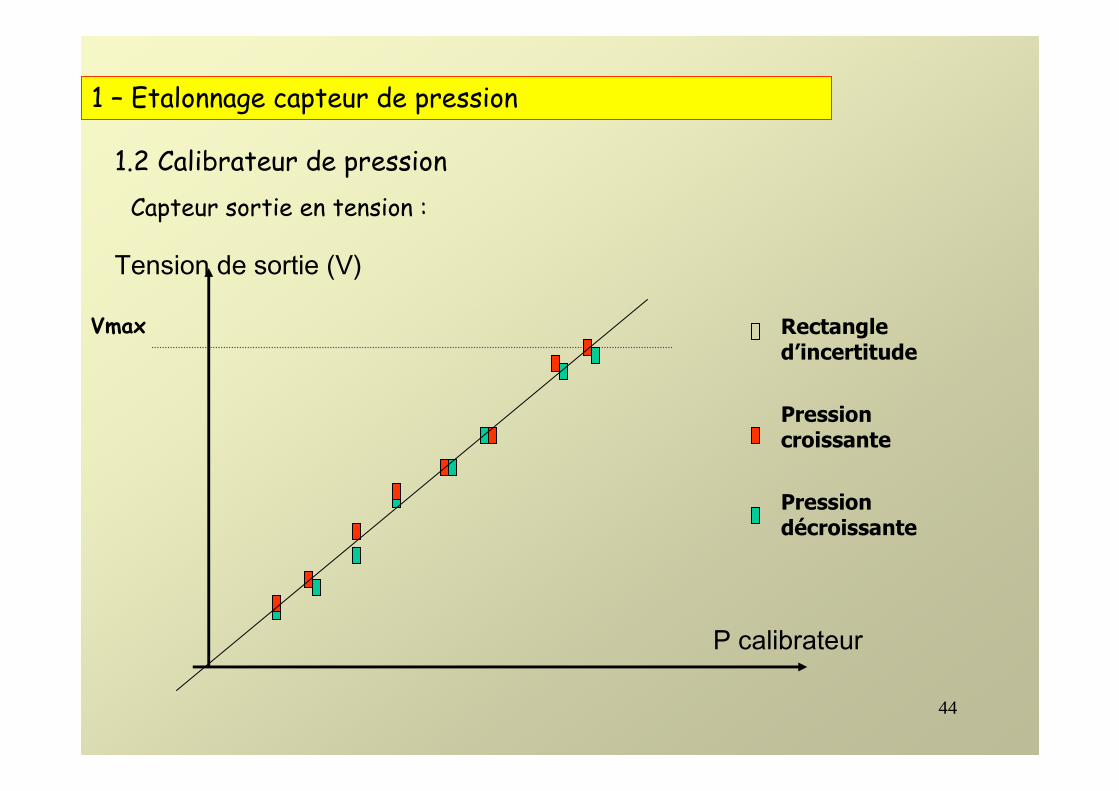
1 – Etalonnage capteur de pression
Rectangle d’incertitude
Pression croissante
Pression décroissante
P calibrateur
Tension de sortie (V)
Vmax
Capteur sortie en tension :
1.2 Calibrateur de pression
45
MICHELSON - 1 : Mesures spectrales
Interférences à deux ondes
1 - Déterminer les longueurs de cohérence des différentes sources lumineuses.2 - Mesurer par interférométrie optique la différence de longueur d’onde ∆λ=λ2-λ1 entre deux radiations d’une source lumineuse Une première mesure sera effectuée à l’aide d’un micromètre mécanique et la seconde par l’intermédiaire d’une « règle optique ».
Objectifs du TP
46
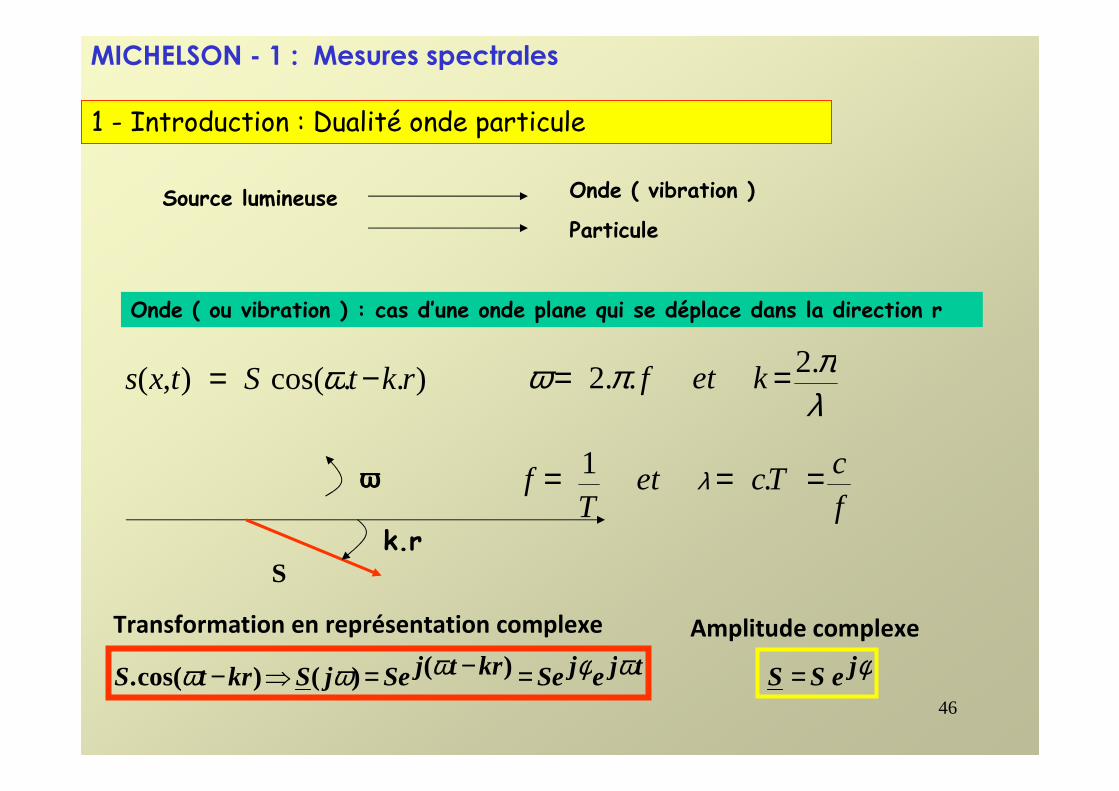
Transformation en représentation complexe
1 - Introduction : Dualité onde particule
MICHELSON - 1 : Mesures spectrales
Source lumineuse Onde ( vibration )
Particule
Onde ( ou vibration ) : cas d’une onde plane qui se déplace dans la direction r
)..cos(),( rktStxs −= ωλππω .2..2 == ketf
fcTcet
Tf === .1 λ
S
ωωωω
k.r
tjejSekrtjSejSkrtS ωφωωω =−=⇒− )()()cos(. φjeSS =
Amplitude complexe
47
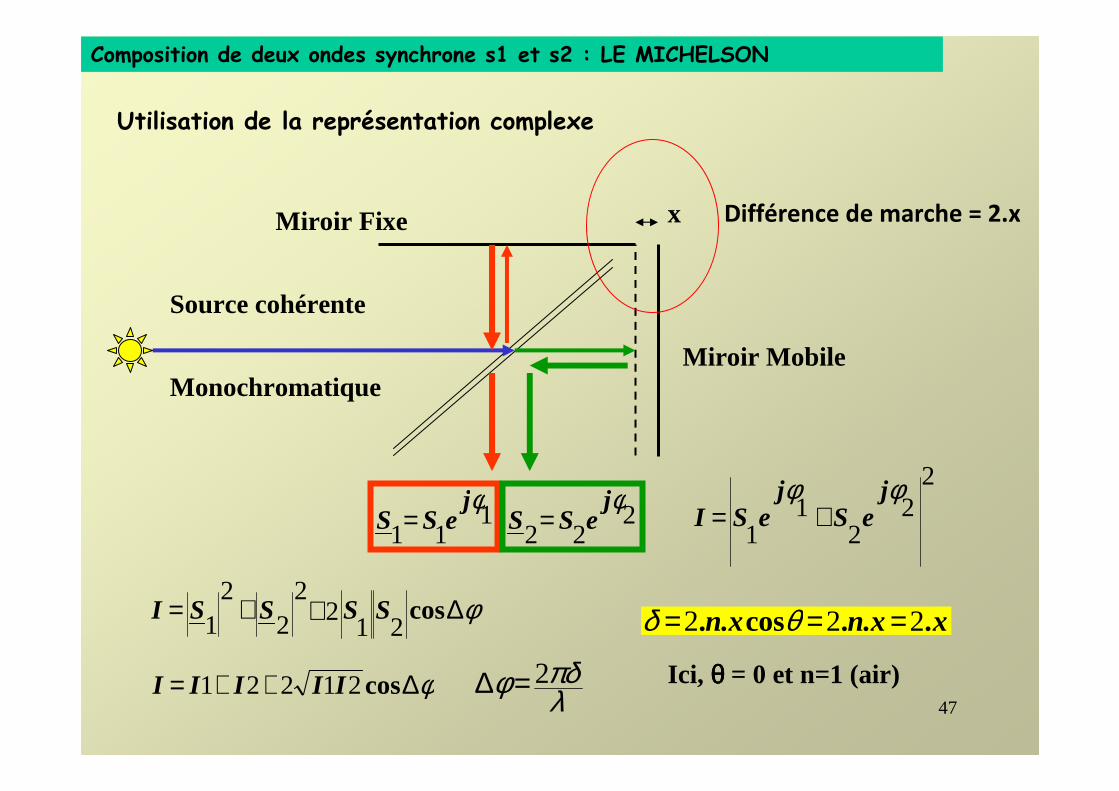
Composition de deux ondes synchrone s1 et s2 : LE MICHELSON
Utilisation de la représentation complexe
111
φjeSS = 2
22φj
eSS =
22
21
1
φφ jeS
jeSI +=
φ∆++= cos21
22
22
1SSSSI
λπδφ 2=∆
xxnxn ...cos.. 222 === θδ
x
Source cohérente
Monochromatique
Miroir Fixe
Miroir Mobile
Ici, θθθθ = 0 et n=1 (air)φ∆++= cos21221 IIIII
Différence de marche = 2.x
48
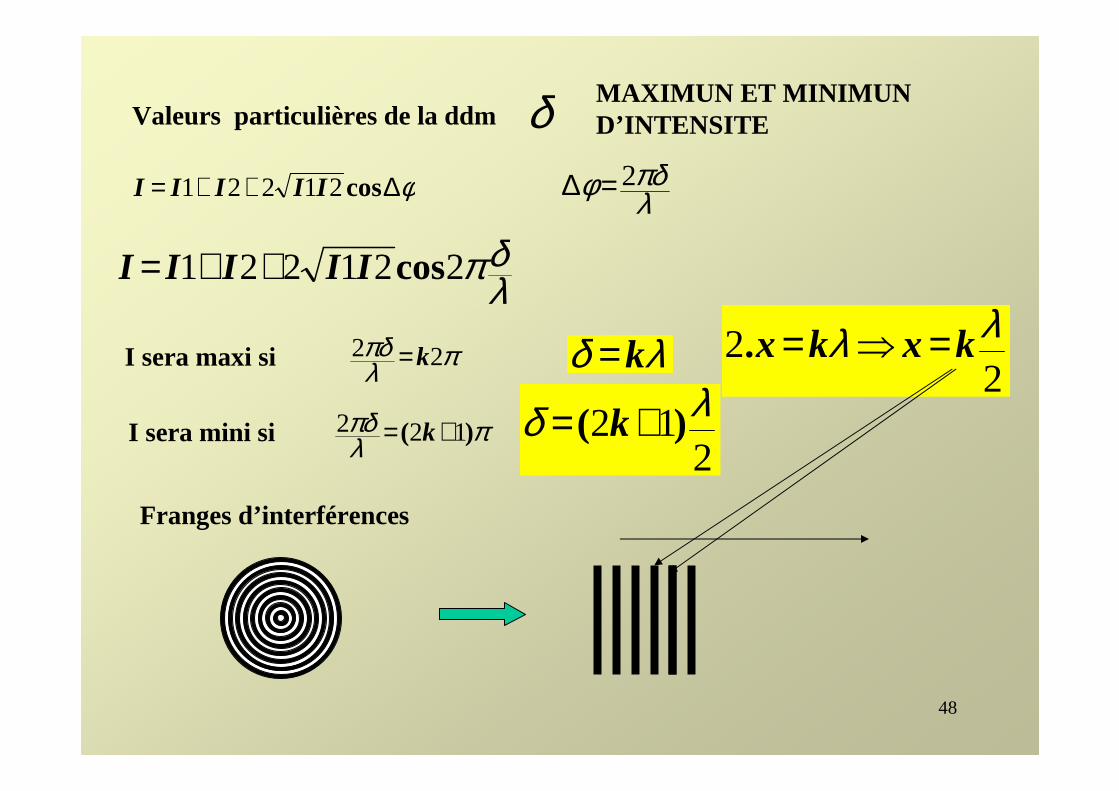
φ∆++= cos21221 IIIII λπδφ 2=∆
λδπ221221 cosIIIII ++=
Valeurs particulières de la ddm
πλπδ 22 k=
δ
I sera maxi si
I sera mini si πλπδ )( 122 += k
λδ k=
212 λδ )( += k
Franges d’interférences
MAXIMUN ET MINIMUN D’INTENSITE
22 λλ kxkx =⇒=.
49
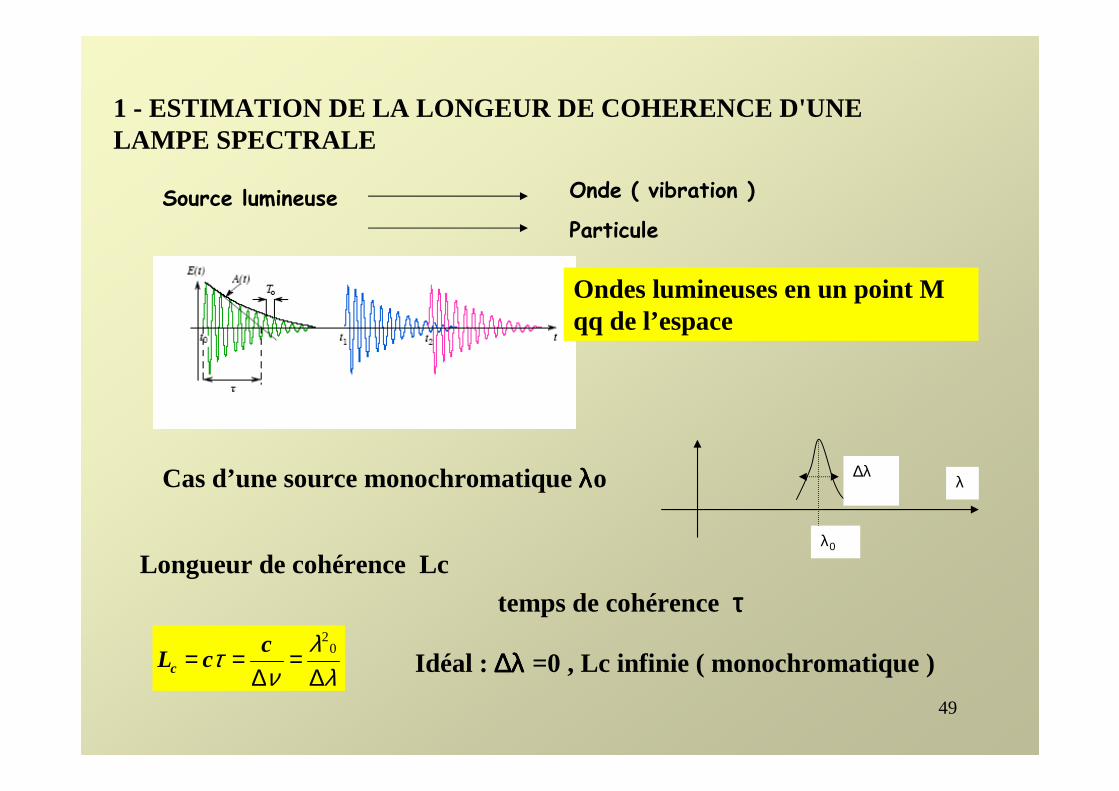
1 - ESTIMATION DE LA LONGEUR DE COHERENCE D'UNE LAMPE SPECTRALE
λ
λ0
∆λ
Source lumineuse Onde ( vibration )
Particule
λλ
ντ
∆=
∆== 0
2ccLc
Cas d’une source monochromatique λλλλo
Longueur de cohérence Lc
temps de cohérence ττττ
Idéal : ∆λ∆λ∆λ∆λ =0 , Lc infinie ( monochromatique )
Ondes lumineuses en un point M qq de l’espace
50
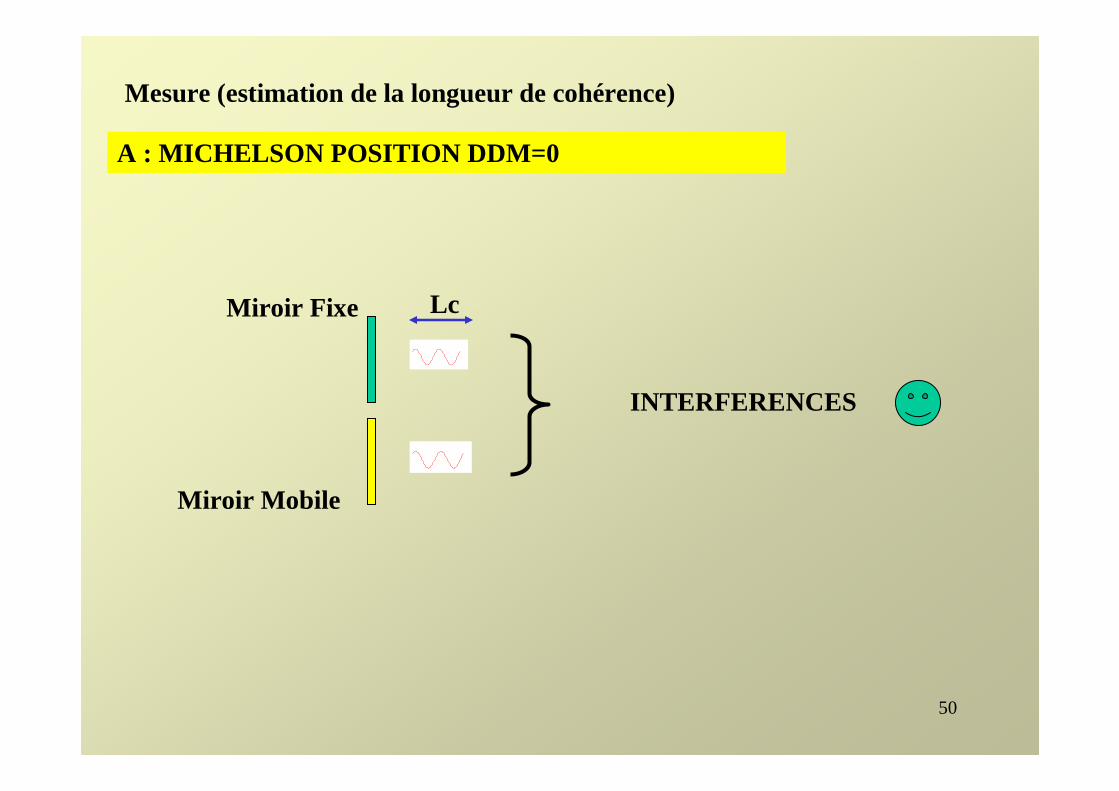
Mesure (estimation de la longueur de cohérence)
A : MICHELSON POSITION DDM=0
LcMiroir Fixe
Miroir Mobile
0 100 200 300 400 500 600 700 800
0 100 200 300 400 500 600 700 800
INTERFERENCES
51
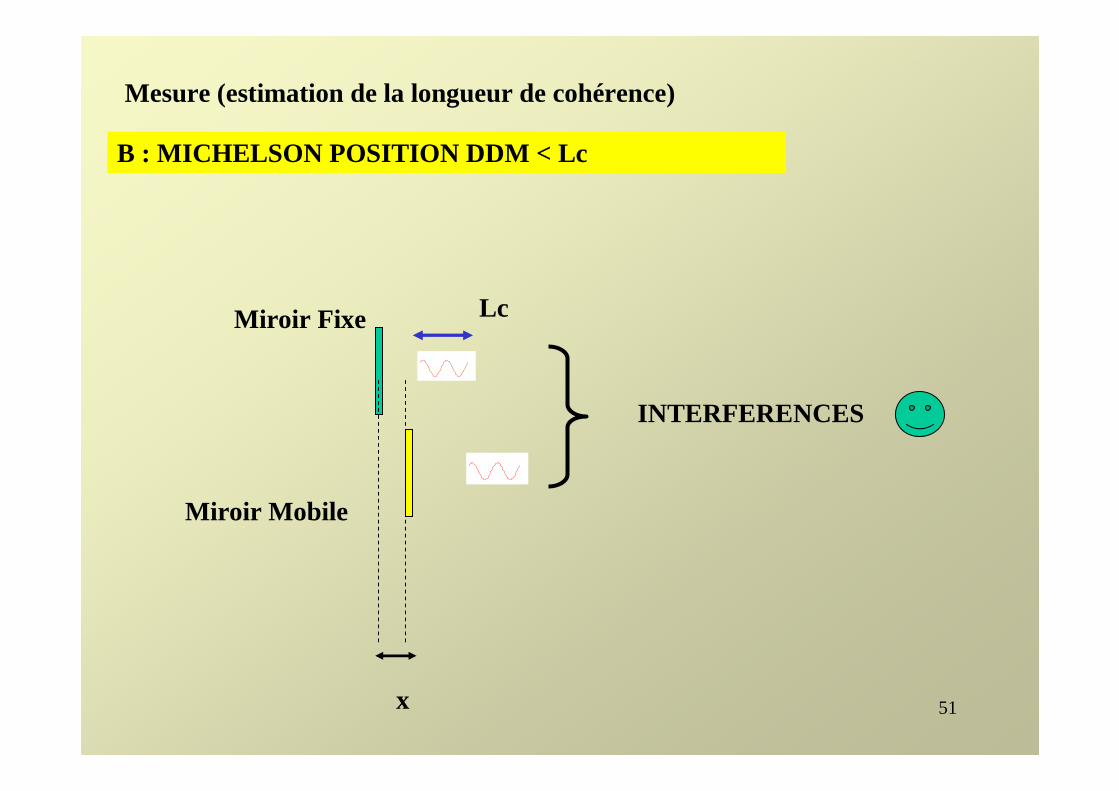
B : MICHELSON POSITION DDM < Lc
Mesure (estimation de la longueur de cohérence)
Miroir Fixe
Miroir Mobile
0 100 200 300 400 500 600 700 800
0 100 200 300 400 500 600 700 800
INTERFERENCES
x
Lc
52
Miroir Fixe
Miroir Mobile
0 100 200 300 400 500 600 700 800
0 100 200 300 400 500 600 700 800
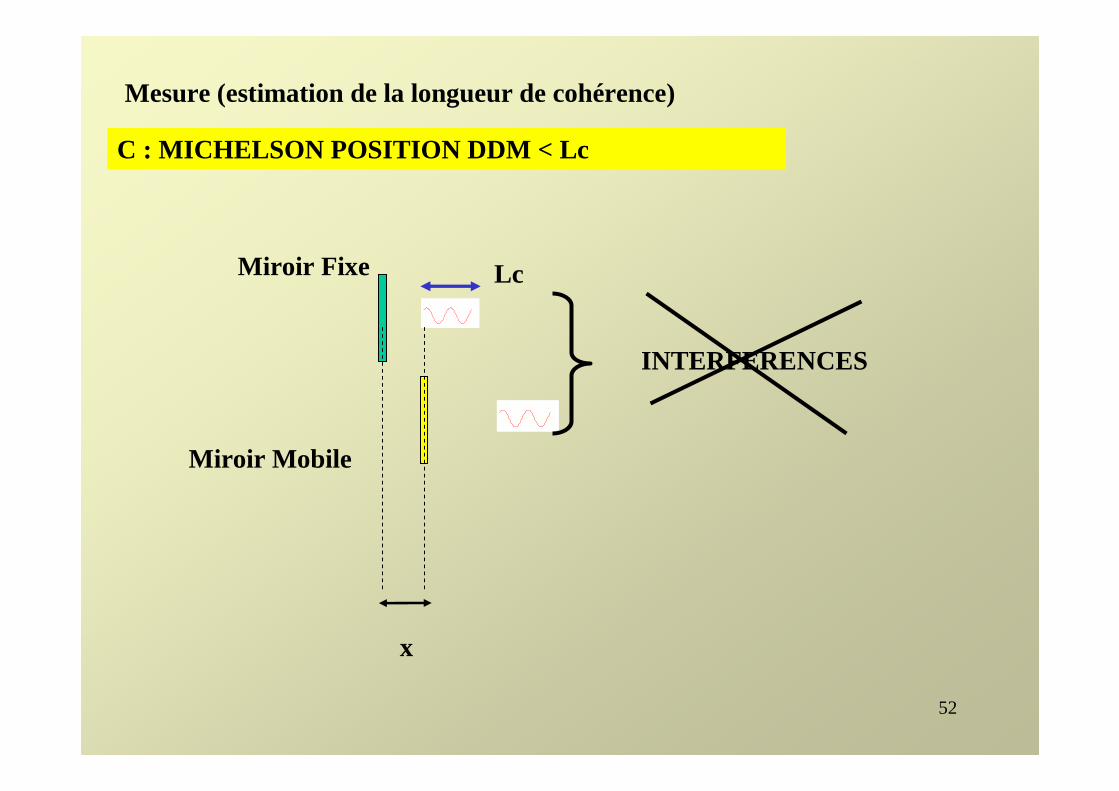
INTERFERENCES
x
C : MICHELSON POSITION DDM < Lc
Mesure (estimation de la longueur de cohérence)
Lc
53
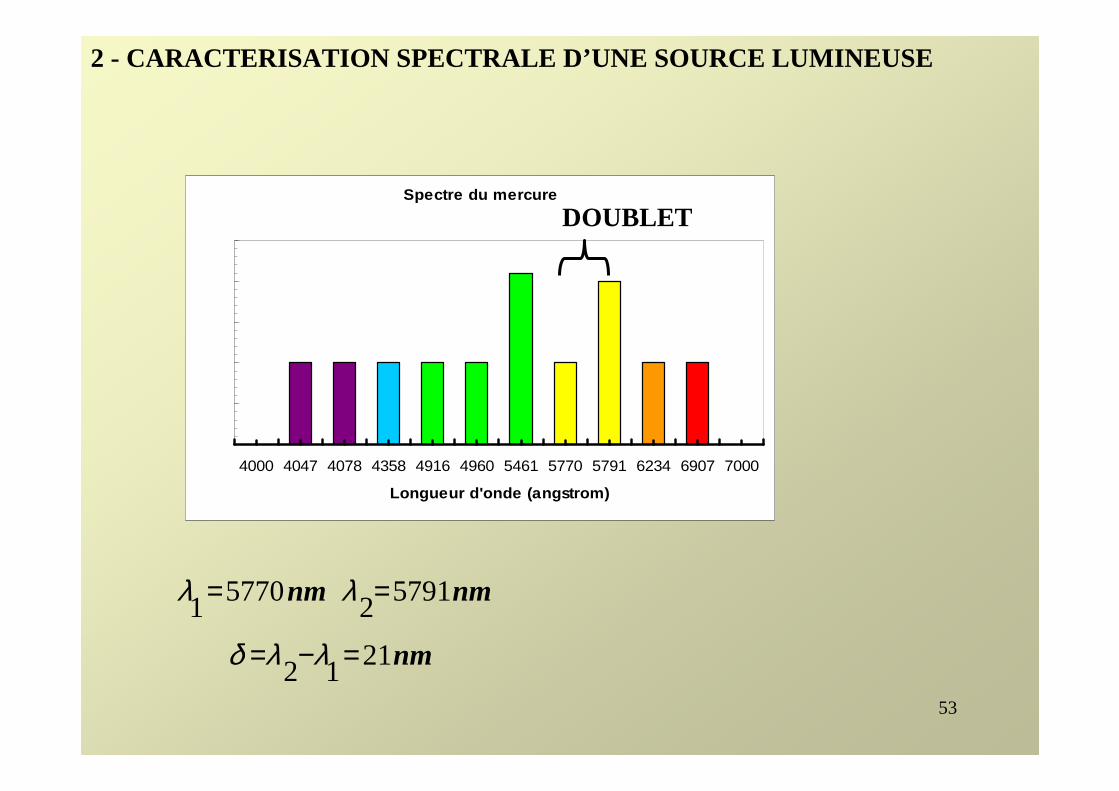
2 - CARACTERISATION SPECTRALE D’UNE SOURCE LUMINEUSE
Spectre du mercure
0
0,5
1
1,5
2
2,5
4000 4047 4078 4358 4916 4960 5461 5770 5791 6234 6907 7000
Longueur d'onde (angstrom)
DOUBLET
nmnm 57912
57701
== λλ
nm2112
=−= λλδ
54
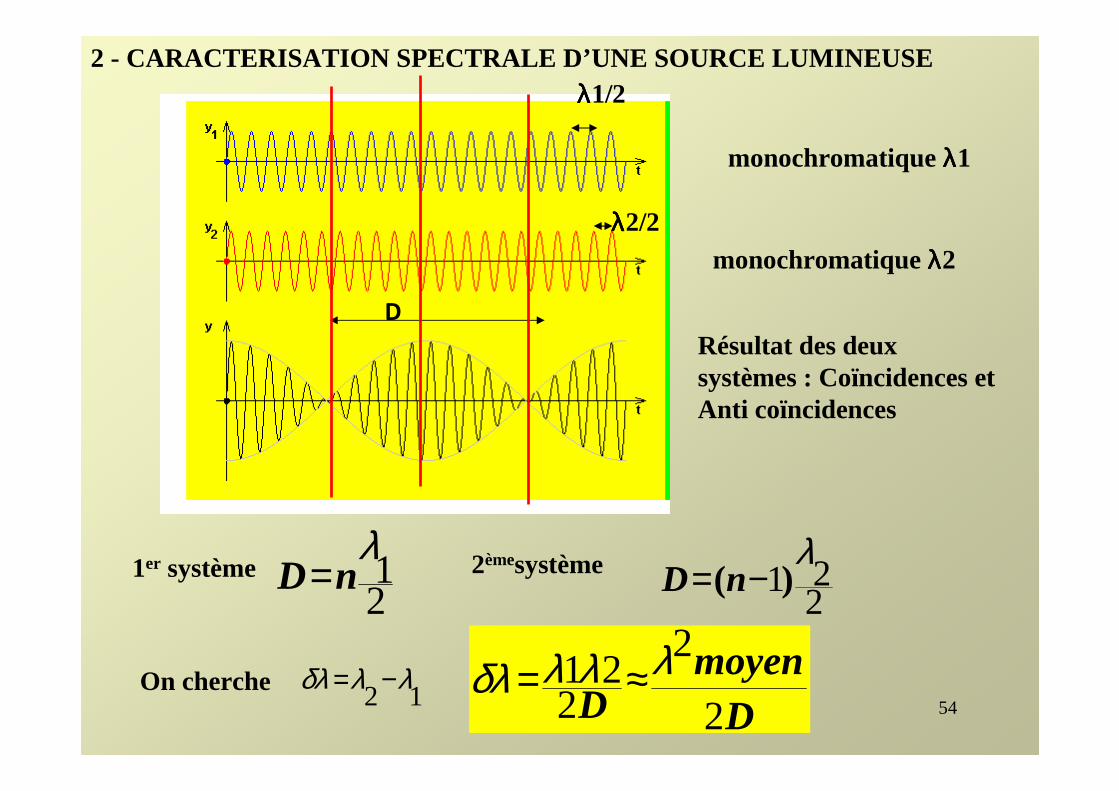
2 - CARACTERISATION SPECTRALE D’UNE SOURCE LUMINEUSE
monochromatique λλλλ1
monochromatique λλλλ2
λλλλ1/2
λλλλ2/2
D
1er système 21
λnD=
221
λ)( −= nD2èmesystème
On cherche 12λλδλ −=
Dmoyen
D 2
2
221 λλλδλ ≈=
Résultat des deux systèmes : Coïncidences et Anti coïncidences
55
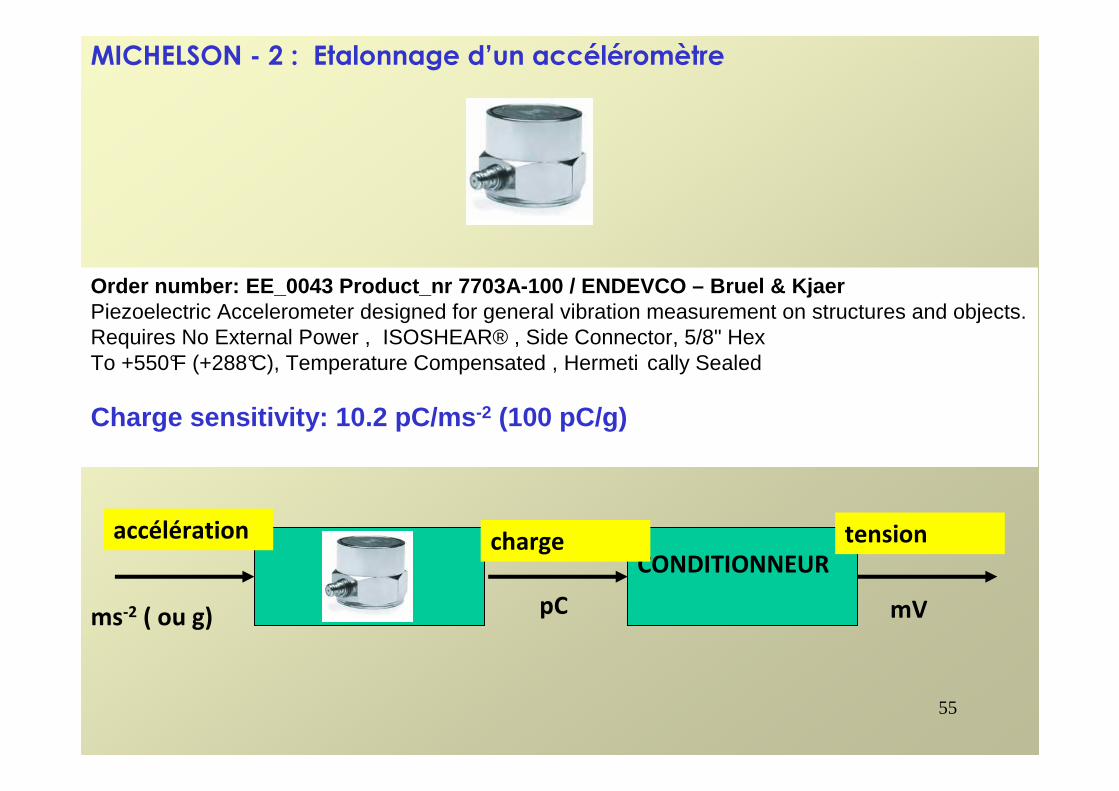
MICHELSON - 2 : Etalonnage d’un accéléromètre
Order number: EE_0043 Product_nr 7703A-100 / ENDEVCO – Bruel & KjaerPiezoelectric Accelerometer designed for general vibration measurement on structures and objects. Requires No External Power , ISOSHEAR® , Side Connector, 5/8" HexTo +550°F (+288°C), Temperature Compensated , Hermeti cally Sealed
Charge sensitivity: 10.2 pC/ms -2 (100 pC/g)
CONDITIONNEUR
ms-2 ( ou g) pC mV
accélération charge tension
56
Etalonnage de capteurs (manomètre et accéléromètre)
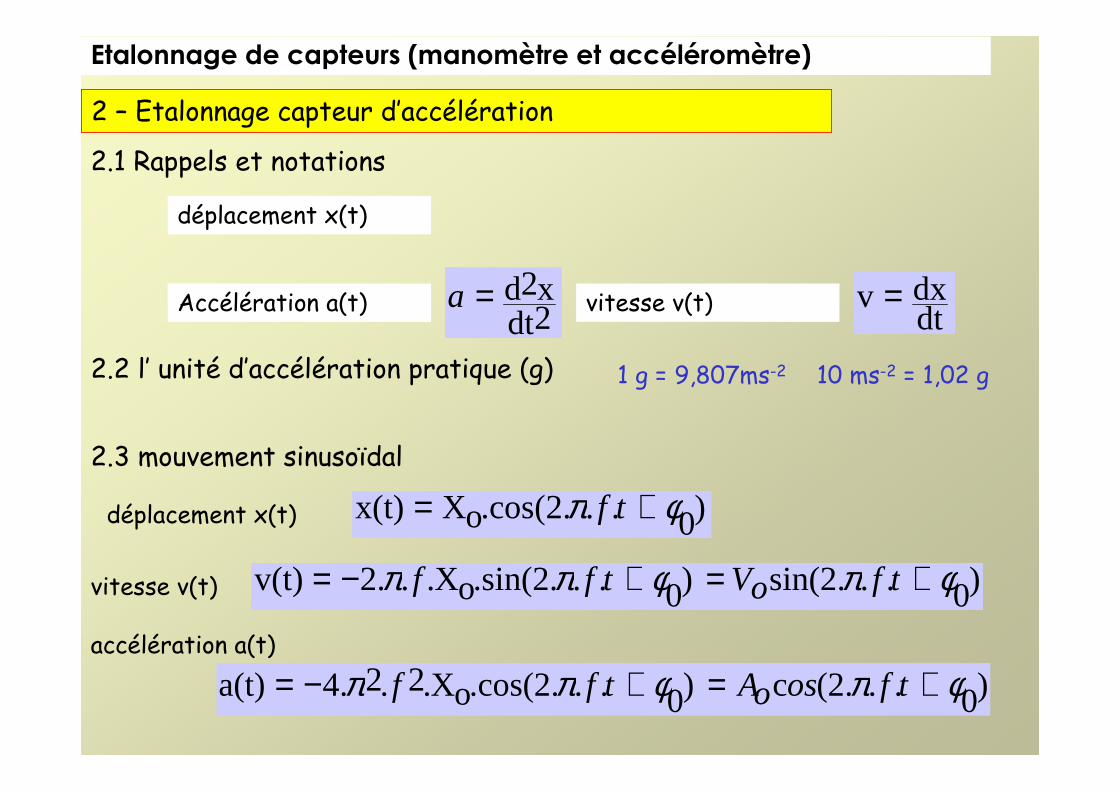
2 – Etalonnage capteur d’accélération
déplacement x(t)
Accélération a(t) vitesse v(t)2dtx2d=a
dtdxv =
2.1 Rappels et notations
2.3 mouvement sinusoïdal
déplacement x(t) )0...cos(2.oXx(t) φπ += tf
)0..sin(2.)0...sin(2.oX..2.v(t) φπφππ +=+−= tfoVtffvitesse v(t)
)0..(2.c)0...cos(2.oX.2.24.a(t) φπφππ +=+−= tfosoAtffaccélération a(t)
2.2 l’ unité d’accélération pratique (g) 1 g = 9,807ms-2 10 ms-2 = 1,02 g
57
Etalonnage de capteurs (manomètre et accéléromètre)
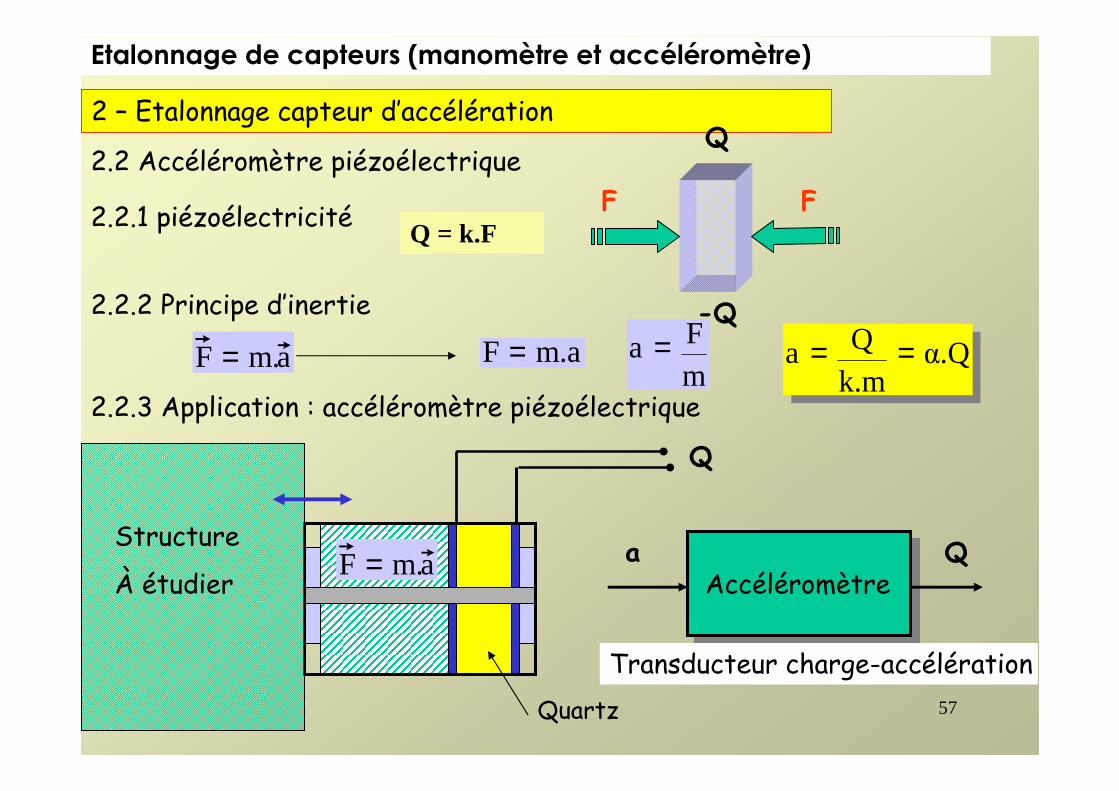
2 – Etalonnage capteur d’accélération
2.2 Accéléromètre piézoélectrique
am.F =Structure
À étudier
Quartz
Q
2.2.3 Application : accéléromètre piézoélectrique
AccéléromètreQa
Transducteur charge-accélération
2.2.1 piézoélectricité
Q
-Q
FF
2.2.2 Principe d’inertie
am.F =
Q = k.F
m.aF =mFa = α.Q
k.mQa ==
58
Etalonnage de capteurs (manomètre et accéléromètre)
2 – Etalonnage capteur d’accélération
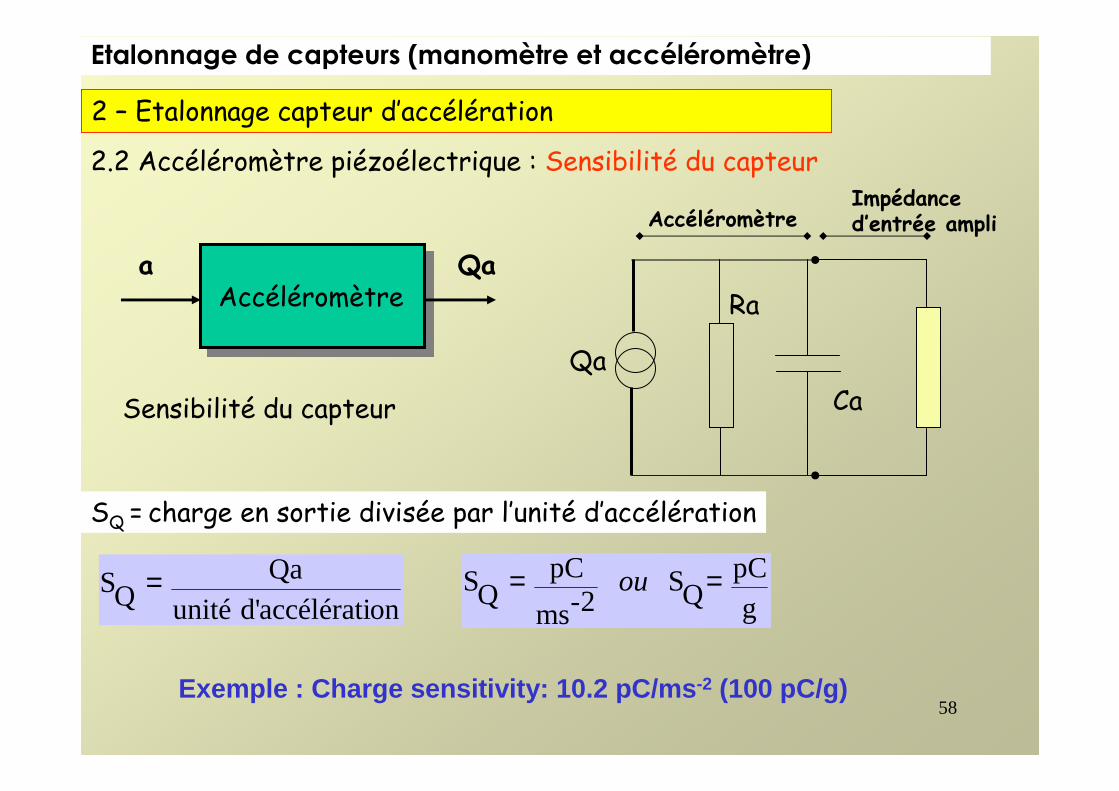
2.2 Accéléromètre piézoélectrique : Sensibilité du capteur
AccéléromètreQaa
Sensibilité du capteur
Qa
Ra
Ca
AccéléromètreImpédance d’entrée ampli
SQ = charge en sortie divisée par l’unité d’accélération
onaccélératid'unitéQa
QS =g
pCQS
2-ms
pCQS == ou
Exemple : Charge sensitivity: 10.2 pC/ms -2 (100 pC/g)
59
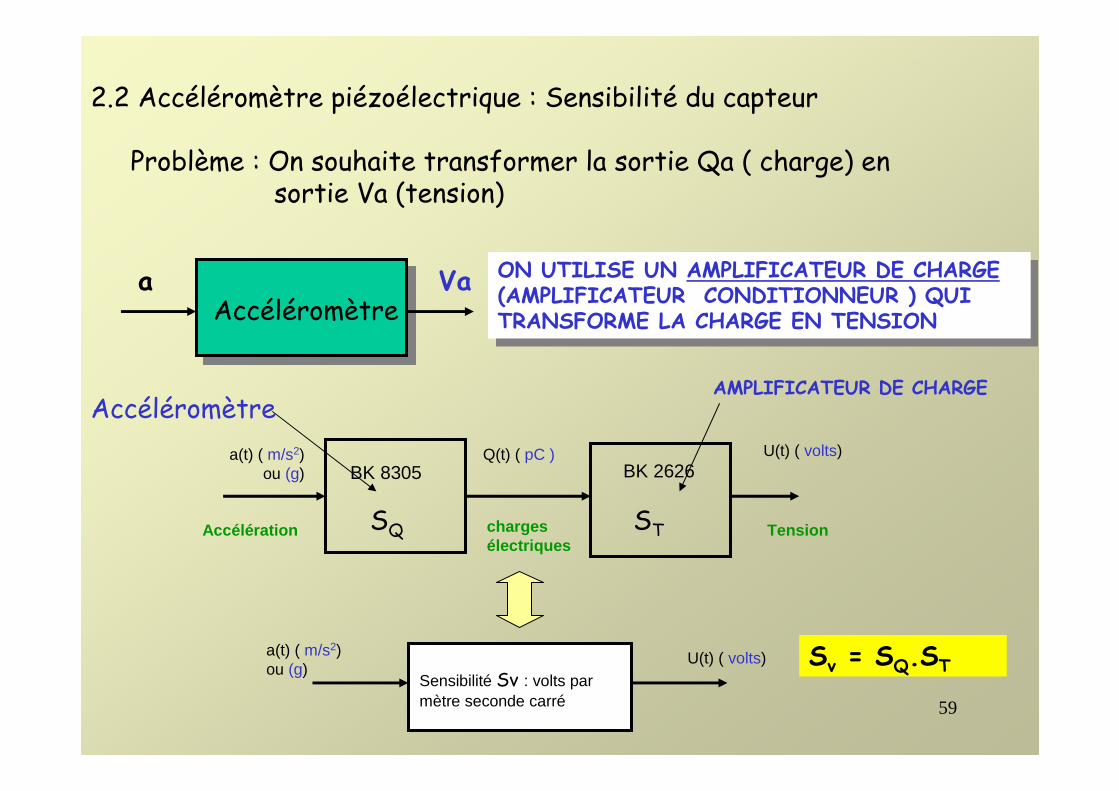
2.2 Accéléromètre piézoélectrique : Sensibilité du capteur
VaaAccéléromètre
Problème : On souhaite transformer la sortie Qa ( charge) en sortie Va (tension)
ON UTILISE UN AMPLIFICATEUR DE CHARGE(AMPLIFICATEUR CONDITIONNEUR ) QUI TRANSFORME LA CHARGE EN TENSION
ON UTILISE UN AMPLIFICATEUR DE CHARGE(AMPLIFICATEUR CONDITIONNEUR ) QUI TRANSFORME LA CHARGE EN TENSION
a(t) ( m/s2) ou (g)
U(t) ( volts)
Tension
a(t) ( m/s2) ou (g)
Q(t) ( pC ) U(t) ( volts)
Accélération chargesélectriques
BK 2626BK 8305
SQ ST
AMPLIFICATEUR DE CHARGEAccéléromètre
Sensibilité Sv : volts par mètre seconde carré
Sv = SQ.ST
60
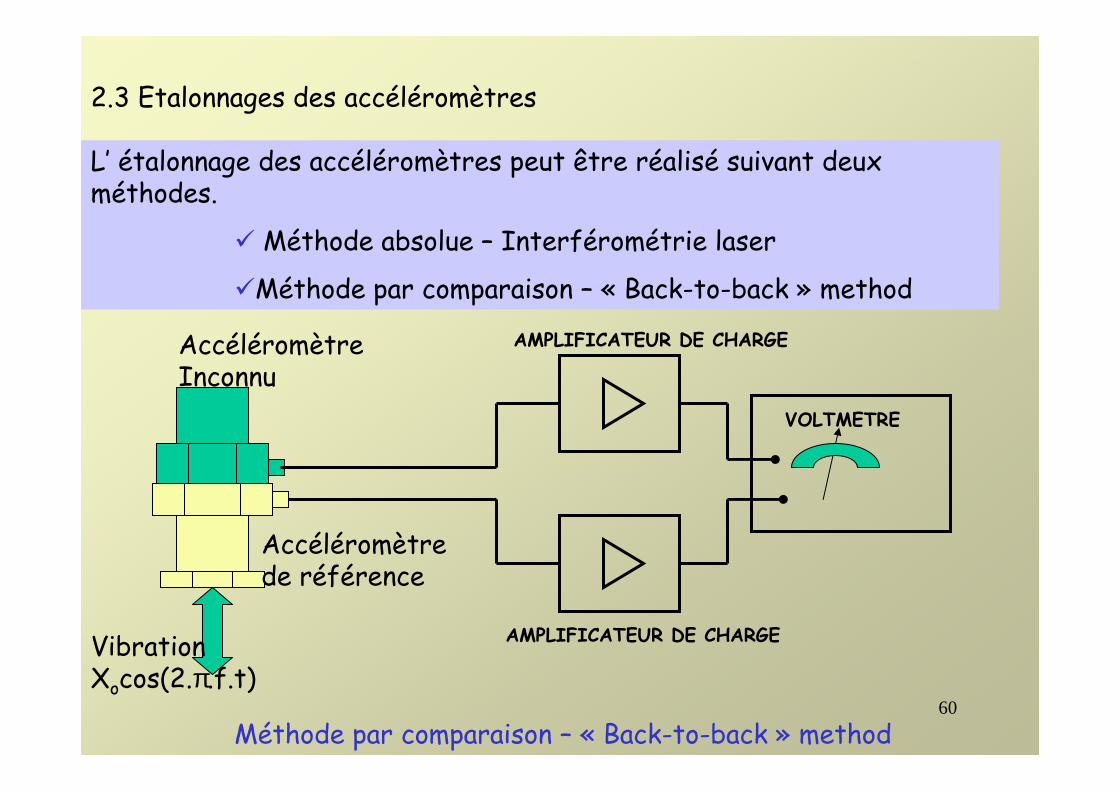
2.3 Etalonnages des accéléromètres
L’ étalonnage des accéléromètres peut être réalisé suivant deux méthodes.
� Méthode absolue – Interférométrie laser
�Méthode par comparaison – « Back-to-back » method
VibrationXocos(2.π.f.t)
Accéléromètrede référence
AccéléromètreInconnu
AMPLIFICATEUR DE CHARGE
AMPLIFICATEUR DE CHARGE
VOLTMETRE
Méthode par comparaison – « Back-to-back » method
61
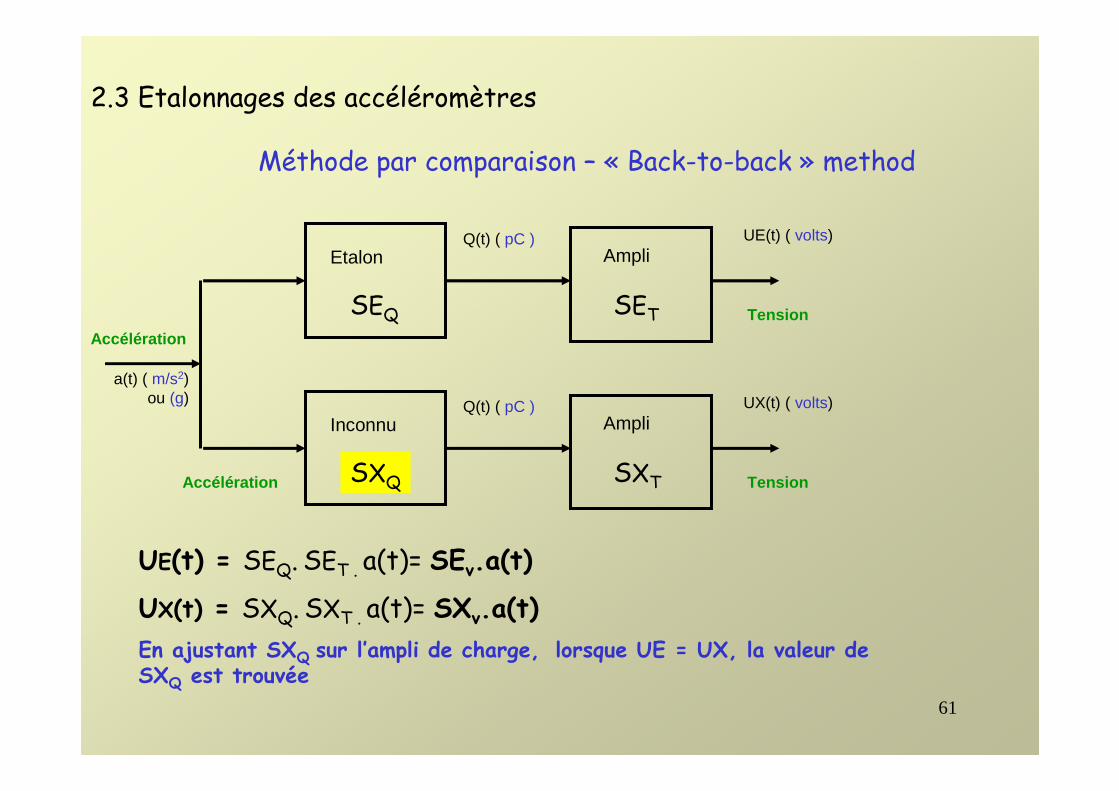
2.3 Etalonnages des accéléromètres
Méthode par comparaison – « Back-to-back » method
Tension
a(t) ( m/s2) ou (g)
Q(t) ( pC ) UE(t) ( volts)
Accélération
AmpliEtalon
SEQ SET
Tension
Q(t) ( pC ) UX(t) ( volts)
Accélération
AmpliInconnu
SXQ SXT
UE(t) = SEQ. SET . a(t)= SEv.a(t)
UX(t) = SXQ. SXT . a(t)= SXv.a(t)
En ajustant SXQ sur l’ampli de charge, lorsque UE = UX, la valeur de SXQ est trouvée
62
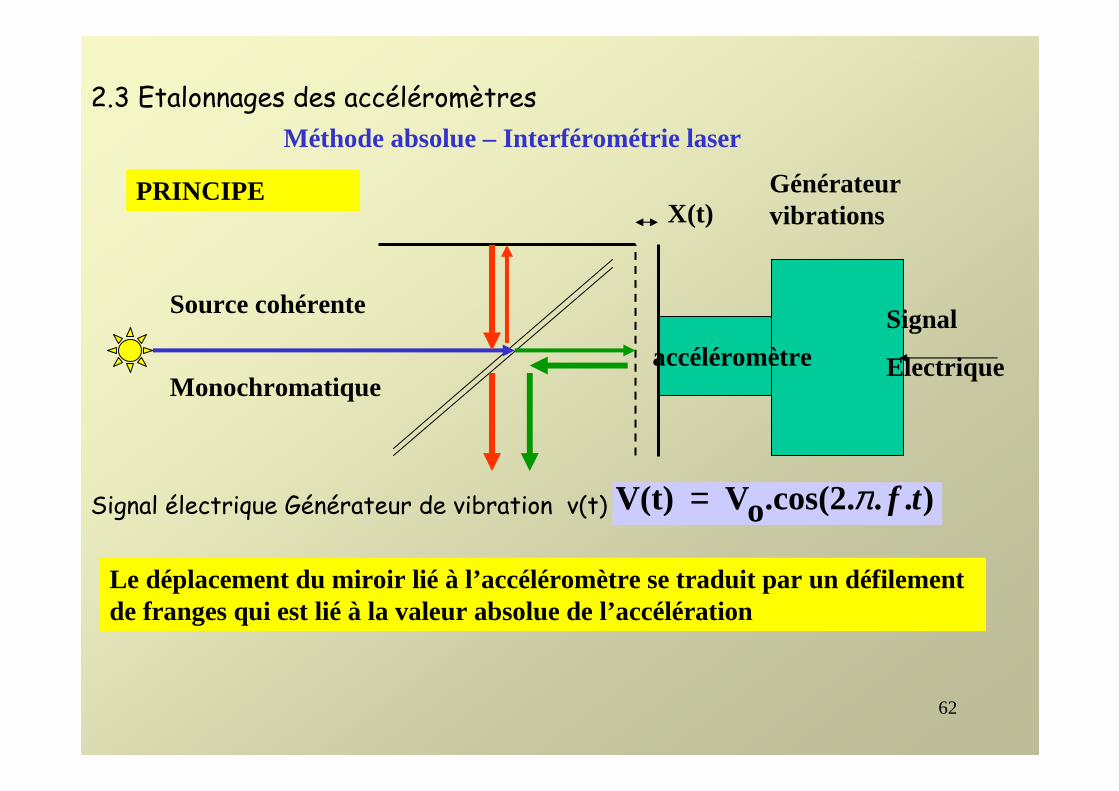
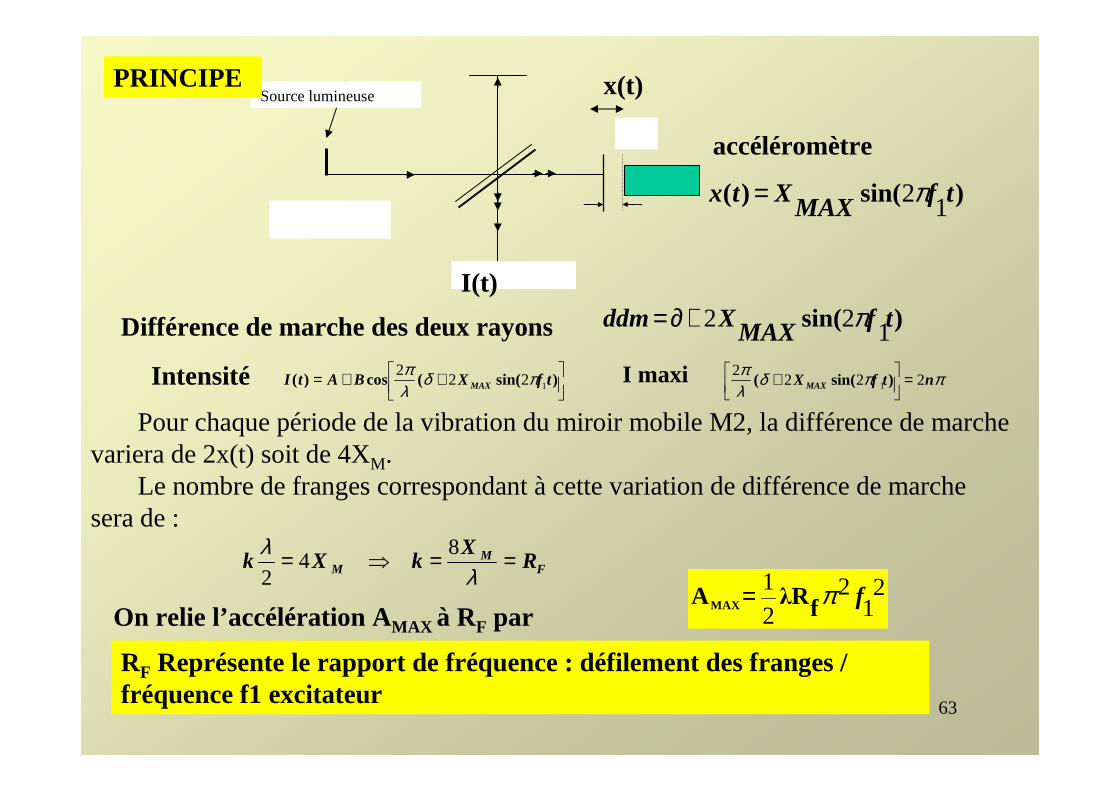
2.3 Etalonnages des accéléromètresMéthode absolue – Interférométrie laser
X(t)
Source cohérente
Monochromatique
PRINCIPE
accéléromètre
Générateur vibrations
Signal
Electrique
Signal électrique Générateur de vibration v(t) )...cos(2.oVV(t) tfπ=
Le déplacement du miroir lié à l’accéléromètre se traduit par un défilement de franges qui est lié à la valeur absolue de l’accélération
63
Source lumineuse
I(t)
x(t)
accéléromètre
)sin()( tfMAXXtx 12π=
++= )sin((cos)( tfXBAtI MAX 1222 πδλπ
)sin( tfMAXXddm 122 π+∂=
ππδλπ
ntfX MAX 2222
1 =
+ )sin((
Différence de marche des deux rayons
PRINCIPE
Intensité
Pour chaque période de la vibration du miroir mobile M2, la différence de marchevariera de 2x(t) soit de 4XM.
Le nombre de franges correspondant à cette variation de différence de marche sera de :
21
22
1fπfλRA MAX =
FM
M RX
kXk ==⇒=λ
λ 84
2
On relie l’accélération AMAX à RF par
RF Représente le rapport de fréquence : défilement des franges / fréquence f1 excitateur
I maxi
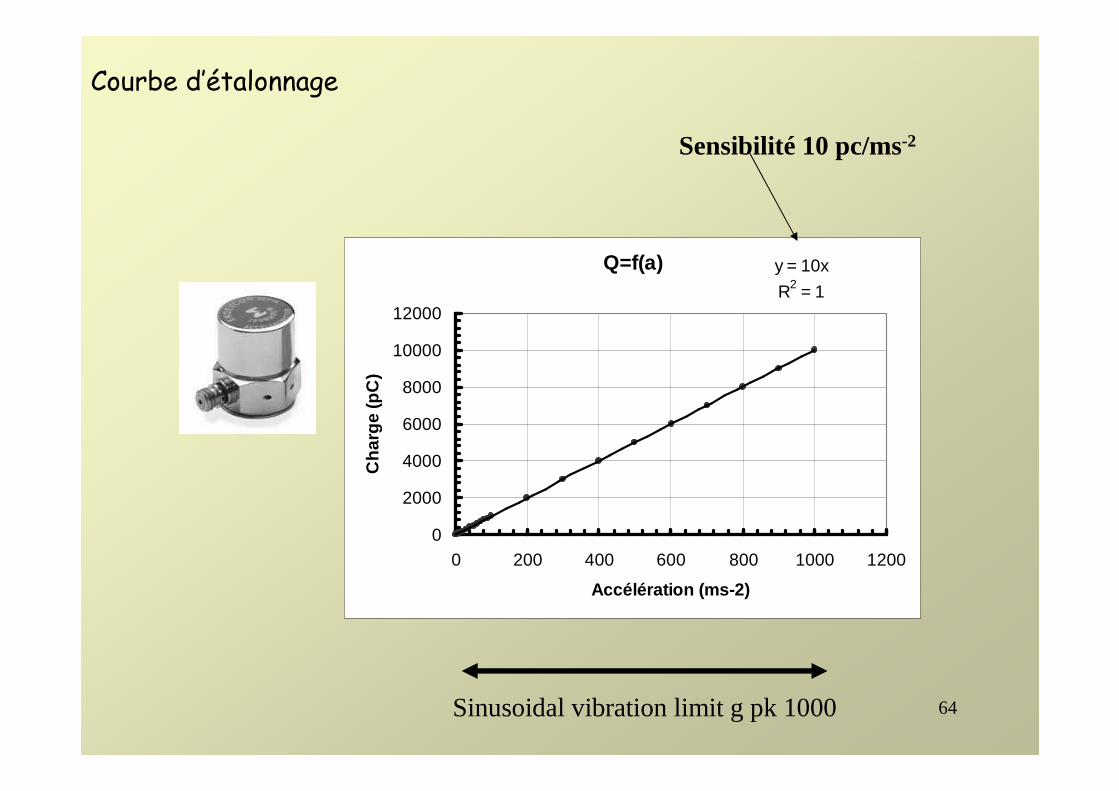
64Sinusoidal vibration limit g pk 1000
Courbe d’étalonnage
Sensibilité 10 pc/ms-2
Q=f(a) y = 10x
R2 = 1
0
2000
4000
6000
8000
10000
12000
0 200 400 600 800 1000 1200
Accélération (ms-2)
Cha
rge
(pC
)