Embed Size (px)
Citation preview

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Projet HaptionBloc moteur Inca 6D

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Le VIRTUOSE 6D40-40 est un bras maître de nouvelle génération pour la télé-opération à retour d’effort.
La société Haption fut fondée initialement dans les locaux du CEA dans la région parisienne, puis re-localisée à la Technopôle de Laval peu après. L'entreprise s'est ensuite implantée à Soulgé sur Ouette(53). Haption est un essaimage du CEA destiné à l'industrialisation de leurs robots.
Le INCA 6D comprend 8 câbles qui s'enroulent sur des tambours. La structure peut être adaptée au cahier des charges du client afin de positionner au mieux les moteurs dans le but de minimiser la gêne engendrée par la présence des câbles dans l'espace de travail. La position des moteurs impacte directement l'espace de travail utile.
Sujet de l’étude

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Le système est composé d’une structure en profilés rainurés anodisés recevant les différents organes : 8 blocs moteurs, un effecteur, sa baie de commande et d’autres éléments.
Bloc moteur
Câble de liaison effecteur-bloc
moteur
Effecteur

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08Bloc
moteur
Câble de liaison effecteur-bloc
moteur
Effecteur

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
1.1 système de ressorts de rappelChacun des 8 moteurs est relié à un ressort de traction qui exerce un effort de rappel sur les câbles moteur assurant une tension constante sur les câbles et évitant ainsi les phénomènes de chevauchement de câbles lors des enroulements/déroulements.Ces ressorts sont protégés par des goulottes.
Goulotte
1.2 Bloc moteurLe bloc moteur intègre l’ensemble des fonctions mécaniques de transmission d’efforts. Il est constitué d’un carter et d’un capot en plastique de couleur noire. Les blocs moteurs dépassent des poteaux de la structure d’environ 50 mm de chaque côté (largeur de 200 mm).
Bloc moteur

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
1
2
3
4
5
1.Un étage de gestion des câbles en sortie comprenant des poulies folles qui guident les câbles de façon à éviter les problèmes d’enroulements.2.Un étage positionnement comprenant une poulie dentée de 60 dents et un potentiomètre multi-tours (10 tours).3.Un étage d’enroulement des câbles comprenant une poulie dentée de 14 dents pour recevoir le couple de l’étage moteur, une zone d’enroulement du câble partant vers l’effecteur, une zone d’enroulement du câble d’équilibrage partant vers le ressort de rappel, une petite poulie dentée de 14 dents pour la synchronisation de l’étage d’enroulement et celui de l’étage de positionnement.4.Un étage moteur comprenant un moteur RE40, un codeur 3600 pts et une poulie dentée de 14 dents.
Il est aussi composé d’un connecteur et d’un faisceau de câbles (5) permettant de faire transiter les différents signaux du contrôleur vers le moteur ( et vice-versa ).
(voir fonctionnement avec la vidéo)
-
Le bloc moteur est composé de 4 étages que l’on décrit en partant du haut :

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
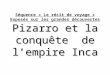
Fonctionnement des tambours
F Câble effecteur
Fcâble rappel
R1
R2
Longueur d’enroulement pour un tour: Lcâble effecteur = 2πR1 et Lcâble rappel = 2πR2 soit Lcâble rappel = Lcâble effecteur R2/R1
Équation des moments en A: ||F câble effecteur|| x R1 = ||F câble rappel|| x R2
Le rapport des rayons étant de 2, on doit enrouler deux fois moins de longueur de câble de rappel mais générer un effort deux fois supérieur à l’effort de tension du câble effecteur.
A

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
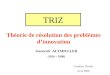
Encombrement du système de rappel:Lo + Flèche précharge + Longueur mini de câble de rappel à enrouler = TROP ENCOMBRANT
Détermination pour le ressort de:La longueur à vide LoLa raideur k (faible)Diamètre du fil et matière
Zone d’utilisation
Flèche précharge
Précharge
Fcâble rappel
Ressort de rappel
Course
Fcâble rappel
MaxMin
Longueur mini de câble de rappel à enrouler

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Problématique
Comme décrit précédemment, le système est équipé de ressorts de rappel.Ces ressorts permettent d’assurer une tension continue dans les câbles, même lorsque le système n’est plus sous-tension. Ainsi, on évite l’emmêlement des câbles sur les poulies, et on améliore la précision d’enroulement. Le ressort choisi a les caractéristiques suivantes :- Raideur : 0.0012 daN/mm- Longueur libre : 360 mm- Longueur maxi : 1500 mm- précontrainte : 100 mm- Diamètre fil : 0.6 mm Effort de rappel mini/maxi : 2,50 N /5 N
L’inconvénient de ce système est de devoir gérer l’intégration des ressorts de rappel (ressorts, câbles, poulies déviatrices), ce qui n’est pas toujours aisé selon l’environnement imposé par les clients.
Aussi, il serait intéressant de concevoir un système permettant de reproduire la fonction attendue dans un volume beaucoup plus faible; l’idéal serait d’intégrer ce système dans le volume proposé par le bloc moteur actuel.

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Modélisation causalede la situation initiale
(Identification des ressources)
Moteur générateurd'effort pour choc
Tambourd'enroulement pour
câble effecteur
Déroulement -enroulement câble
effecteur (sanschevauchement)
Poulies folles pourcâble effecteur
Effort "constant" surle câble effecteur
Tambour d'enroulementpour câble de rappel
Vitesse variable ducâble effecteur
Longueur deDéroulement -
Enroulement câbleeffecteur (2m)
Déroulement -Enroulement câble de
rappel (course)
Déroulement -enroulement câble de
rappel (sanschevauchement)
Encombrement extérieurdu ressort + câble
Caractéristiques duressort de rappel
Câble de rappel(caractéristiques)

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Moteur générateurd'effort pour choc
Tambourd'enroulement pour
câble effecteur
Déroulement -enroulement câble
effecteur (sanschevauchement)
Poulies folles pourcâble effecteur
Effort "constant" surle câble effecteur
Tambour d'enroulementpour câble de rappel
Vitesse variable ducâble effecteur
Longueur deDéroulement -
Enroulement câbleeffecteur (2m)
Déroulement -Enroulement câble de
rappel (course)
Déroulement -enroulement câble de
rappel (sanschevauchement)
Encombrement extérieurdu ressort + câble
Caractéristiques duressort de rappel
Câble de rappel(caractéristiques)
Modélisation causalede la situation initiale

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Mise en évidence desContradictions Physiques
Moteur générateurd'effort pour choc
Tambourd'enroulement pour
câble effecteur
Déroulement -enroulement câble
effecteur (sanschevauchement)
Poulies folles pourcâble effecteur
Effort "constant" surle câble effecteur
Tambour d'enroulementpour câble de rappel
Vitesse variable ducâble effecteur
Longueur deDéroulement -
Enroulement câbleeffecteur (2m)
Déroulement -Enroulement câble de
rappel (course)
Déroulement -enroulement câble de
rappel (sanschevauchement)
Encombrement extérieurdu ressort + câble
Caractéristiques duressort de rappel
Câble de rappel(caractéristiques)
CP4
CP1
CP5
CP2
CP3

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Expression des Contradictions Physiques
CP1 : Le facteur utile « Effort constant sur le câble effecteur » devrait exister dans la mesure où il favorise l’« enroulement/déroulement des 2m de câble effecteur » et ne devrait pas exister pour limiter la « longueur du câble de rappel »
CP2 : Le facteur utile « Tambour d’enroulement pour câble effecteur » devrait exister car il permet de « stocker le câble effecteur » et ne devrait pas exister afin de limiter l’ « encombrement du système de rappel » .
CP3 : Le facteur utile « Tambour d’enroulement pour câble de rappel » devrait exister car il permet de « stocker le câble de rappel » mais il ne devrait pas exister afin de « limiter les risques de chevauchement du câble de rappel».
CP4: Le facteur nuisible « Déroulement – Enroulement câble de rappel (course) » ne devrait pas exister car il augmente les « risques de chevauchement du câble de rappel » même s’il favorise l’« enroulement/déroulement des 2m de câble effecteur »
CP5: Le facteur utile « Tambour d’enroulement pour câble de rappel » devrait exister car il permet « stocker le câble de rappel » mais ne devrait pas exister car il implique « Un encombrement conséquent du système de rappel ( rappel ) ».

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Expression desContradictions Techniques
CT1: L’amélioration de « l’effort constant sur le câble effecteur » dégrade « les caractéristiques du ressort de rappel »
Paramètre à améliorer: 10 Paramètre en conflit: 3Principes de résolution: 17, 19, 9, 36
CT2: L’amélioration de « Tambour d’enroulement pour câble effecteur » dégrade « les caractéristiques du ressort »
Paramètre à améliorer: 3 Paramètre en conflit: 10Principes de résolution: 17, 10, 4
CT3: L’amélioration de « Déroulement – Enroulement câble de rappel (course) » dégrade « Tambour d’enroulement pour câble de rappel »
Paramètre à améliorer: 3 Paramètre en conflit: 5Principes de résolution: 15, 17, 4
CT4: L’amélioration de « Déroulement – Enroulement câble de rappel (course) » dégrade « longueur de déroulement enroulement câble effecteur »
Paramètre à améliorer: 3 Paramètre en conflit: 7Principes de résolution:7, 17, 4, 35
CT5: L’amélioration de « Tambour d’enroulement pour câble de rappel » dégrade « les caractéristiques du ressort »
Paramètre à améliorer: 5 Paramètre en conflit: 3Principes de résolution:14, 15, 18, 4

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
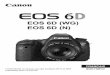
Le principe17 arrive 2 fois en première place et 2 fois en seconde.Changement de dimension
Le principe 4 arrive 3 fois en troisième place et 1 fois en quatrièmeAsymétrie
Le principe 15 arrive 1 fois en première place et 1 fois en deuxièmeMobilité
0
1
2
3
4
5
4 7 9 10 14 15 17 18 19 35 36
Distribution des principes
de solutions dominants

Triz
– P
lan
de fo
rmat
ion
acad
émiq
ue A
nnée
200
7-20
08
Solutions envisagées
Principe 15 Mobilité
Principe 15 Mobilité
Principe17
Changement de dimension
Principe 15 Mobilité
Principe17
Changement de dimension