Embed Size (px)
Citation preview
PCSI/MPSI Sciences de l’Ingénieur
1/16
DS de Sciences de l’Ingénieur, PCSI et MPSI, novembre 16
Durée : 2h
Corrigé sur le site : http://perso.numericable.fr/starnaud/ Exercice Tracer le diagramme de Bode du système de fonction de transfert :
).125,01.(30)(
pppH
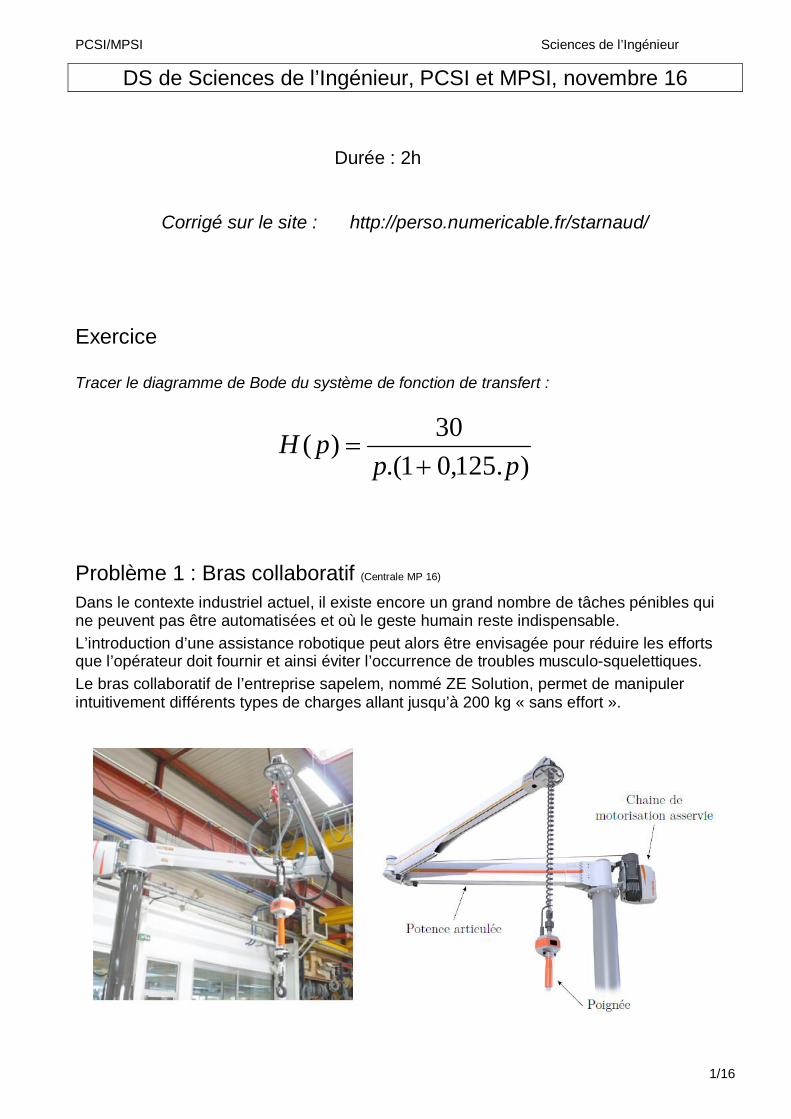
Problème 1 : Bras collaboratif (Centrale MP 16) Dans le contexte industriel actuel, il existe encore un grand nombre de tâches pénibles qui ne peuvent pas être automatisées et où le geste humain reste indispensable. L’introduction d’une assistance robotique peut alors être envisagée pour réduire les efforts que l’opérateur doit fournir et ainsi éviter l’occurrence de troubles musculo-squelettiques. Le bras collaboratif de l’entreprise sapelem, nommé ZE Solution, permet de manipuler intuitivement différents types de charges allant jusqu’à 200 kg « sans effort ».
PCSI/MPSI Sciences de l’Ingénieur
2/16
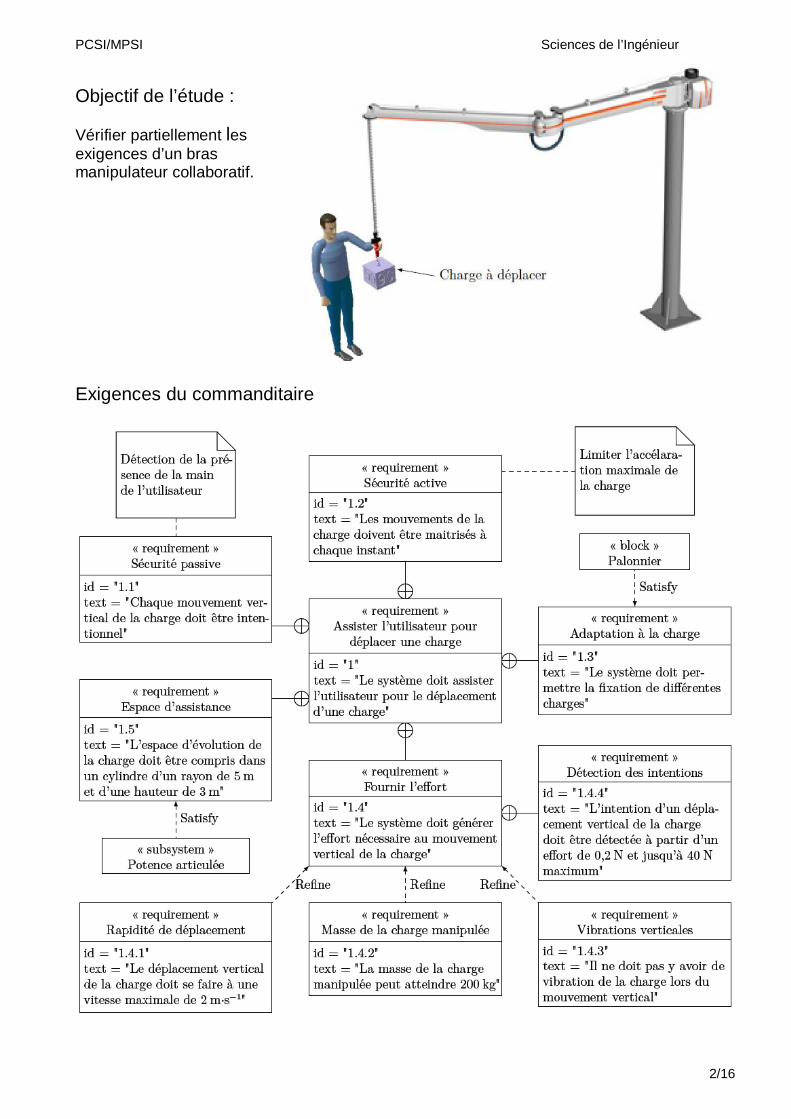
Objectif de l’étude : Vérifier partiellement les exigences d’un bras manipulateur collaboratif.
Exigences du commanditaire
PCSI/MPSI Sciences de l’Ingénieur
3/16
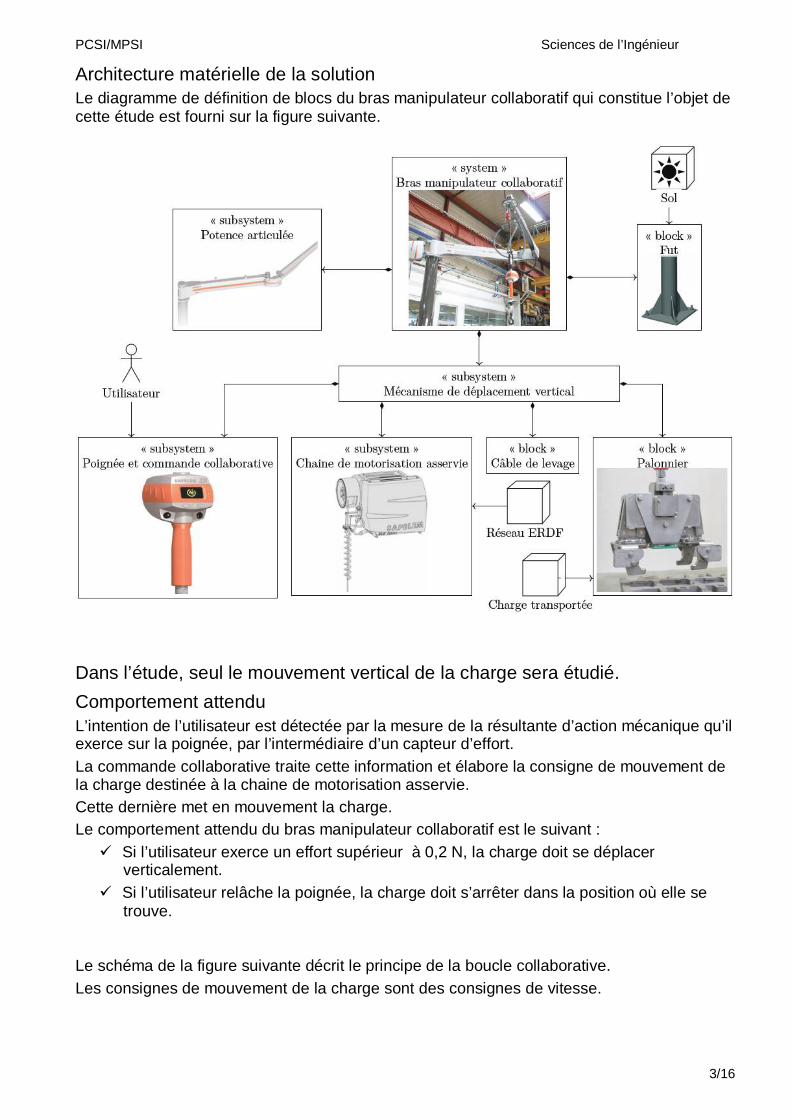
Architecture matérielle de la solution Le diagramme de définition de blocs du bras manipulateur collaboratif qui constitue l’objet de cette étude est fourni sur la figure suivante.
Dans l’étude, seul le mouvement vertical de la charge sera étudié. Comportement attendu L’intention de l’utilisateur est détectée par la mesure de la résultante d’action mécanique qu’il exerce sur la poignée, par l’intermédiaire d’un capteur d’effort. La commande collaborative traite cette information et élabore la consigne de mouvement de la charge destinée à la chaine de motorisation asservie. Cette dernière met en mouvement la charge. Le comportement attendu du bras manipulateur collaboratif est le suivant : Si l’utilisateur exerce un effort supérieur à 0,2 N, la charge doit se déplacer
verticalement. Si l’utilisateur relâche la poignée, la charge doit s’arrêter dans la position où elle se
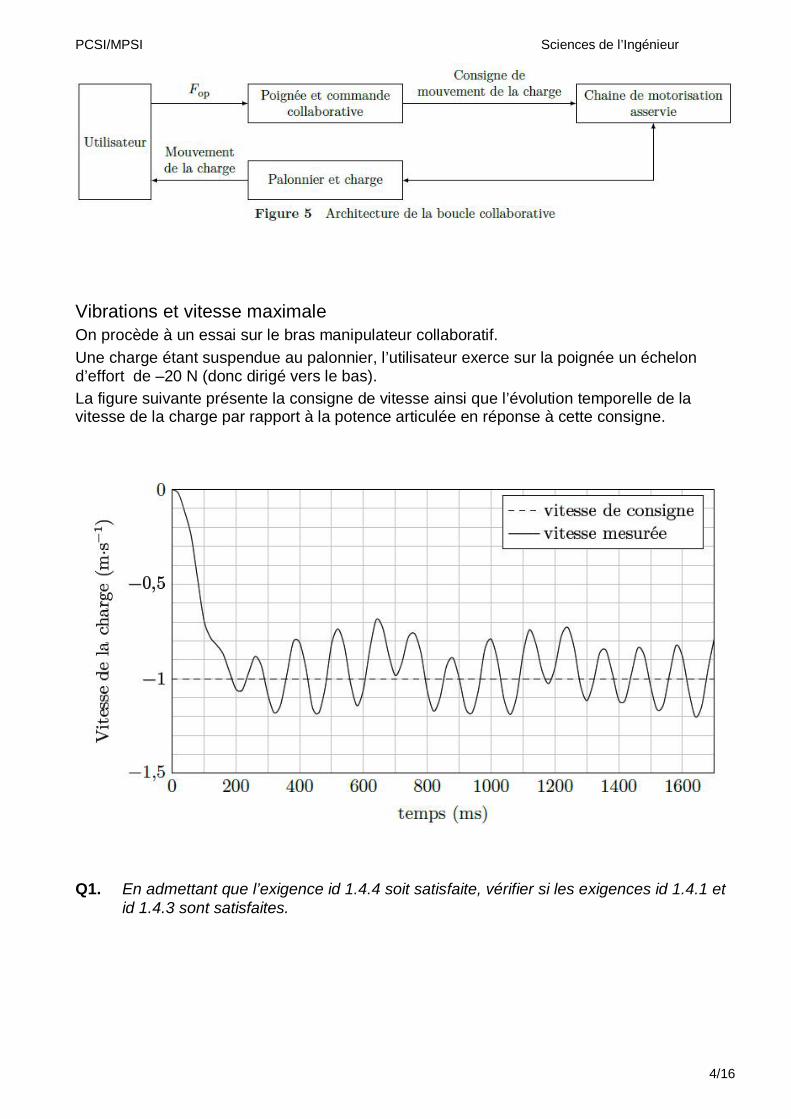
trouve. Le schéma de la figure suivante décrit le principe de la boucle collaborative. Les consignes de mouvement de la charge sont des consignes de vitesse.
PCSI/MPSI Sciences de l’Ingénieur
4/16
Vibrations et vitesse maximale On procède à un essai sur le bras manipulateur collaboratif. Une charge étant suspendue au palonnier, l’utilisateur exerce sur la poignée un échelon d’effort de –20 N (donc dirigé vers le bas). La figure suivante présente la consigne de vitesse ainsi que l’évolution temporelle de la vitesse de la charge par rapport à la potence articulée en réponse à cette consigne.
Q1. En admettant que l’exigence id 1.4.4 soit satisfaite, vérifier si les exigences id 1.4.1 et
id 1.4.3 sont satisfaites.
PCSI/MPSI Sciences de l’Ingénieur
5/16
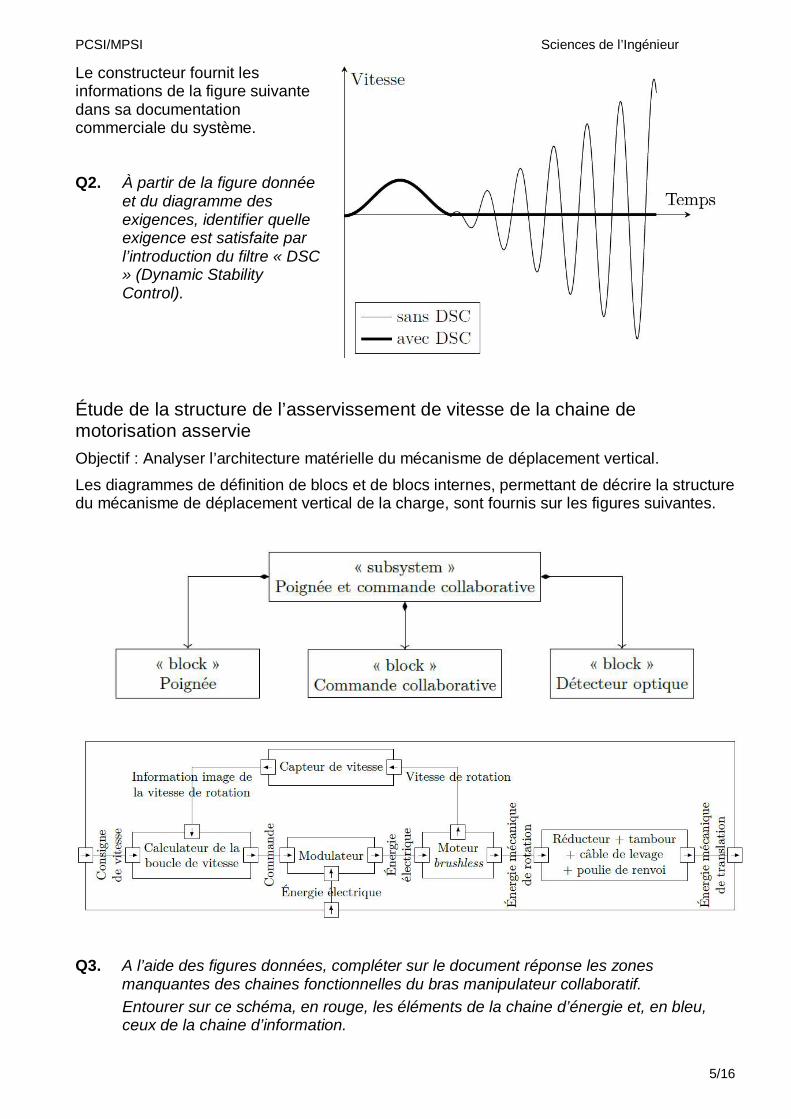
Le constructeur fournit les informations de la figure suivante dans sa documentation commerciale du système. Q2. À partir de la figure donnée
et du diagramme des exigences, identifier quelle exigence est satisfaite par l’introduction du filtre « DSC » (Dynamic Stability Control).
Étude de la structure de l’asservissement de vitesse de la chaine de motorisation asservie Objectif : Analyser l’architecture matérielle du mécanisme de déplacement vertical. Les diagrammes de définition de blocs et de blocs internes, permettant de décrire la structure du mécanisme de déplacement vertical de la charge, sont fournis sur les figures suivantes.
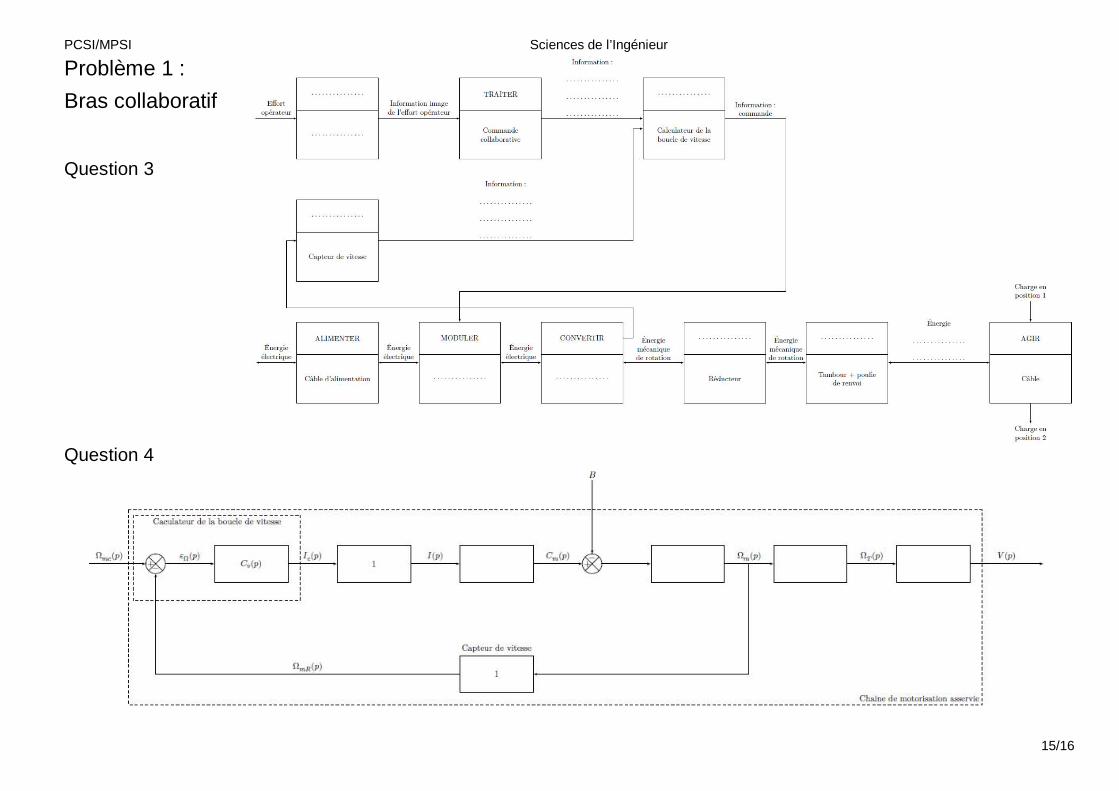
Q3. A l’aide des figures données, compléter sur le document réponse les zones
manquantes des chaines fonctionnelles du bras manipulateur collaboratif. Entourer sur ce schéma, en rouge, les éléments de la chaine d’énergie et, en bleu, ceux de la chaine d’information.
PCSI/MPSI Sciences de l’Ingénieur
6/16
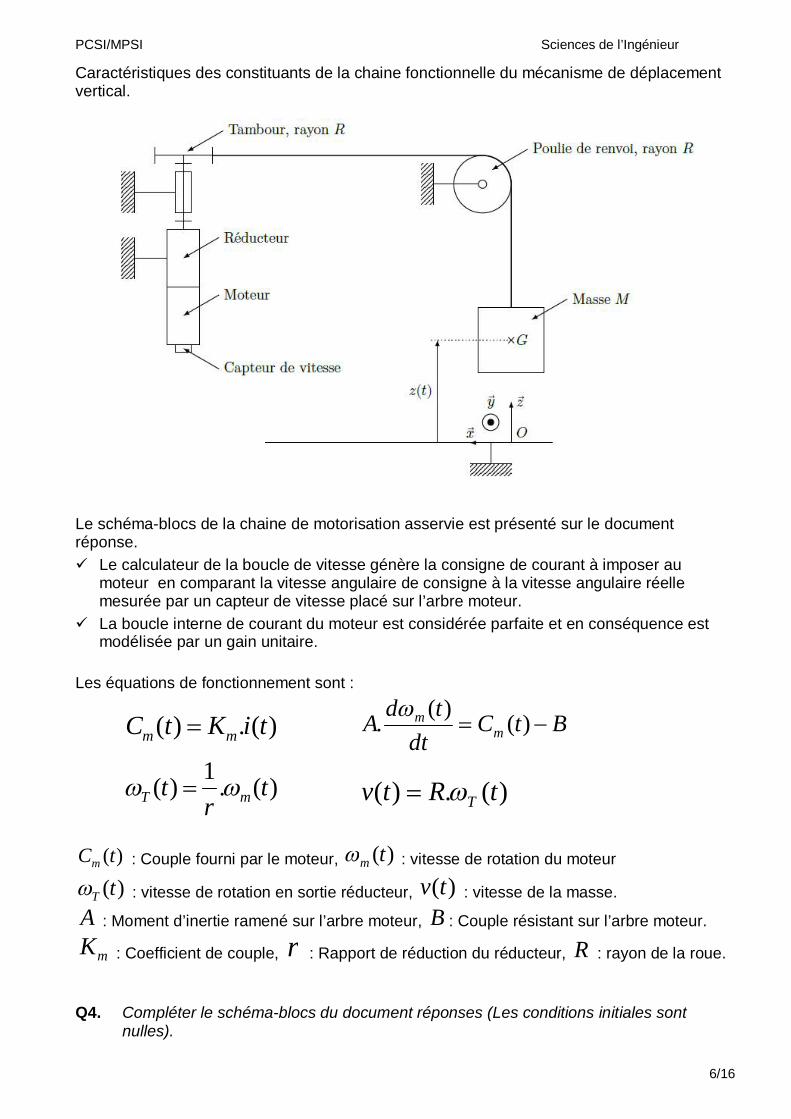
Caractéristiques des constituants de la chaine fonctionnelle du mécanisme de déplacement vertical.
Le schéma-blocs de la chaine de motorisation asservie est présenté sur le document réponse. Le calculateur de la boucle de vitesse génère la consigne de courant à imposer au
moteur en comparant la vitesse angulaire de consigne à la vitesse angulaire réelle mesurée par un capteur de vitesse placé sur l’arbre moteur.
La boucle interne de courant du moteur est considérée parfaite et en conséquence est modélisée par un gain unitaire.
Les équations de fonctionnement sont :
)(.)( tiKtC mm BtCdt
tdA mm )()(.
)(.1)( tr
t mT )(.)( tRtv T
)(tCm : Couple fourni par le moteur, )(tm : vitesse de rotation du moteur
)(tT : vitesse de rotation en sortie réducteur, )(tv : vitesse de la masse.
A : Moment d’inertie ramené sur l’arbre moteur, B : Couple résistant sur l’arbre moteur.
mK : Coefficient de couple, r : Rapport de réduction du réducteur, R : rayon de la roue. Q4. Compléter le schéma-blocs du document réponses (Les conditions initiales sont
nulles).
PCSI/MPSI Sciences de l’Ingénieur
7/16
On donne : 23 .10.13,5 mkgA
1..9,0 AmNKm
88,15r mR 05,0
Le correcteur est proportionnel : cKpC )( . Etude du comportement en poursuite. On considère le couple résistant sur l’arbre moteur nul : 0)( pB .
Q5. Déterminer la fonction de transfert en boucle fermée : )()()(1 p
ppHmc
m
.
La mettre sous forme canonique pKpH
.1)(1
.
Identifier ses paramètres caractéristiques.
L’asservissement est il précis ?
Calculer le temps de réponse à 5% lorsque 1)( cKpC .
Quelle est l’influence d’une augmentation du gain du correcteur cK ? Etude du comportement en régulation. On considère la consigne de vitesse nulle 0)( tmc et le couple résistant sur l’arbre
moteur non nul 0)( pB .
Q5. Déterminer l’expression de )( p en fonction de )( pB , mK et cK .
En déduire l’erreur due à une perturbation de type échelon unitaire. Conclure.
PCSI/MPSI Sciences de l’Ingénieur
8/16
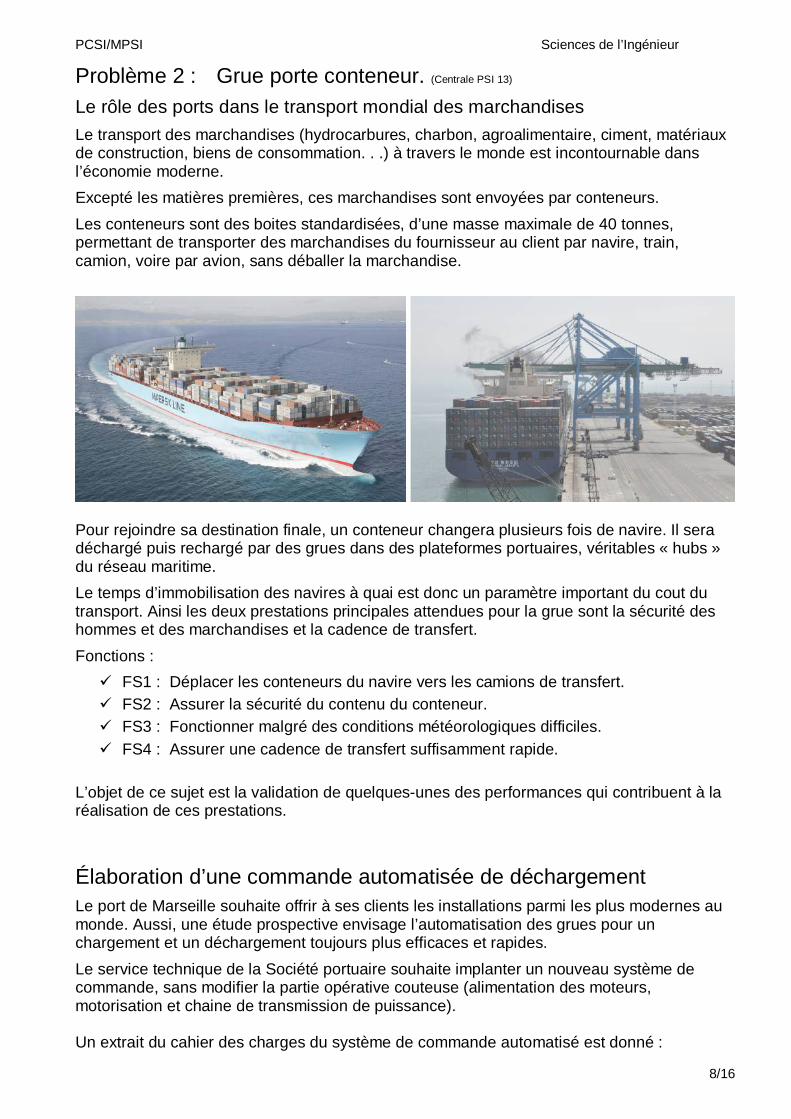
Problème 2 : Grue porte conteneur. (Centrale PSI 13) Le rôle des ports dans le transport mondial des marchandises Le transport des marchandises (hydrocarbures, charbon, agroalimentaire, ciment, matériaux de construction, biens de consommation. . .) à travers le monde est incontournable dans l’économie moderne. Excepté les matières premières, ces marchandises sont envoyées par conteneurs. Les conteneurs sont des boites standardisées, d’une masse maximale de 40 tonnes, permettant de transporter des marchandises du fournisseur au client par navire, train, camion, voire par avion, sans déballer la marchandise.
Pour rejoindre sa destination finale, un conteneur changera plusieurs fois de navire. Il sera déchargé puis rechargé par des grues dans des plateformes portuaires, véritables « hubs » du réseau maritime. Le temps d’immobilisation des navires à quai est donc un paramètre important du cout du transport. Ainsi les deux prestations principales attendues pour la grue sont la sécurité des hommes et des marchandises et la cadence de transfert. Fonctions : FS1 : Déplacer les conteneurs du navire vers les camions de transfert. FS2 : Assurer la sécurité du contenu du conteneur. FS3 : Fonctionner malgré des conditions météorologiques difficiles. FS4 : Assurer une cadence de transfert suffisamment rapide.
L’objet de ce sujet est la validation de quelques-unes des performances qui contribuent à la réalisation de ces prestations. Élaboration d’une commande automatisée de déchargement Le port de Marseille souhaite offrir à ses clients les installations parmi les plus modernes au monde. Aussi, une étude prospective envisage l’automatisation des grues pour un chargement et un déchargement toujours plus efficaces et rapides. Le service technique de la Société portuaire souhaite implanter un nouveau système de commande, sans modifier la partie opérative couteuse (alimentation des moteurs, motorisation et chaine de transmission de puissance). Un extrait du cahier des charges du système de commande automatisé est donné :
PCSI/MPSI Sciences de l’Ingénieur
9/16
Stabilité : système stable, dépassements de moins de 10% (en réponse à un échelon). Rapidité : temps de réponse à 5% inférieur à 10 s (en réponse à un échelon). Précision du positionnement de la charge sur le camion : 10 cm. Sensibilité aux perturbations : aucune en régime permanent pour une perturbation due
à un vent constant. Asservissement de position du chariot Objectif : Modéliser le procédé et choisir la loi de commande en position du chariot pour
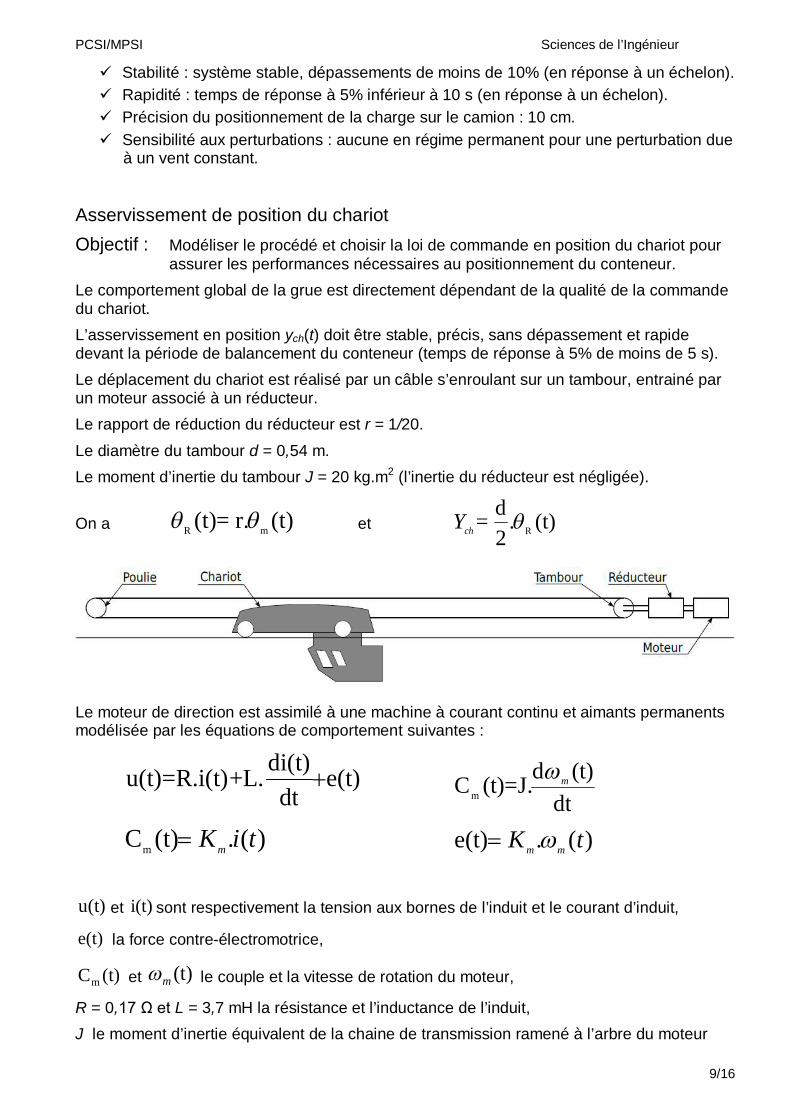
assurer les performances nécessaires au positionnement du conteneur. Le comportement global de la grue est directement dépendant de la qualité de la commande du chariot. L’asservissement en position ych(t) doit être stable, précis, sans dépassement et rapide devant la période de balancement du conteneur (temps de réponse à 5% de moins de 5 s). Le déplacement du chariot est réalisé par un câble s’enroulant sur un tambour, entrainé par un moteur associé à un réducteur. Le rapport de réduction du réducteur est r = 1/20. Le diamètre du tambour d = 0,54 m. Le moment d’inertie du tambour J = 20 kg.m2 (l’inertie du réducteur est négligée).
On a (t).r=(t) mR et (t).2d= RchY
Le moteur de direction est assimilé à une machine à courant continu et aimants permanents modélisée par les équations de comportement suivantes :
e(t)dt
di(t)L.+R.i(t)=u(t) dt
(t)dJ.=(t)Cmm
)(.(t)Cm tiKm )(.e(t) tK mm u(t) et i(t) sont respectivement la tension aux bornes de l’induit et le courant d’induit,
e(t) la force contre-électromotrice,
(t)Cm et (t)m le couple et la vitesse de rotation du moteur,
R = 0,17 Ω et L = 3,7 mH la résistance et l’inductance de l’induit, J le moment d’inertie équivalent de la chaine de transmission ramené à l’arbre du moteur
PCSI/MPSI Sciences de l’Ingénieur
10/16
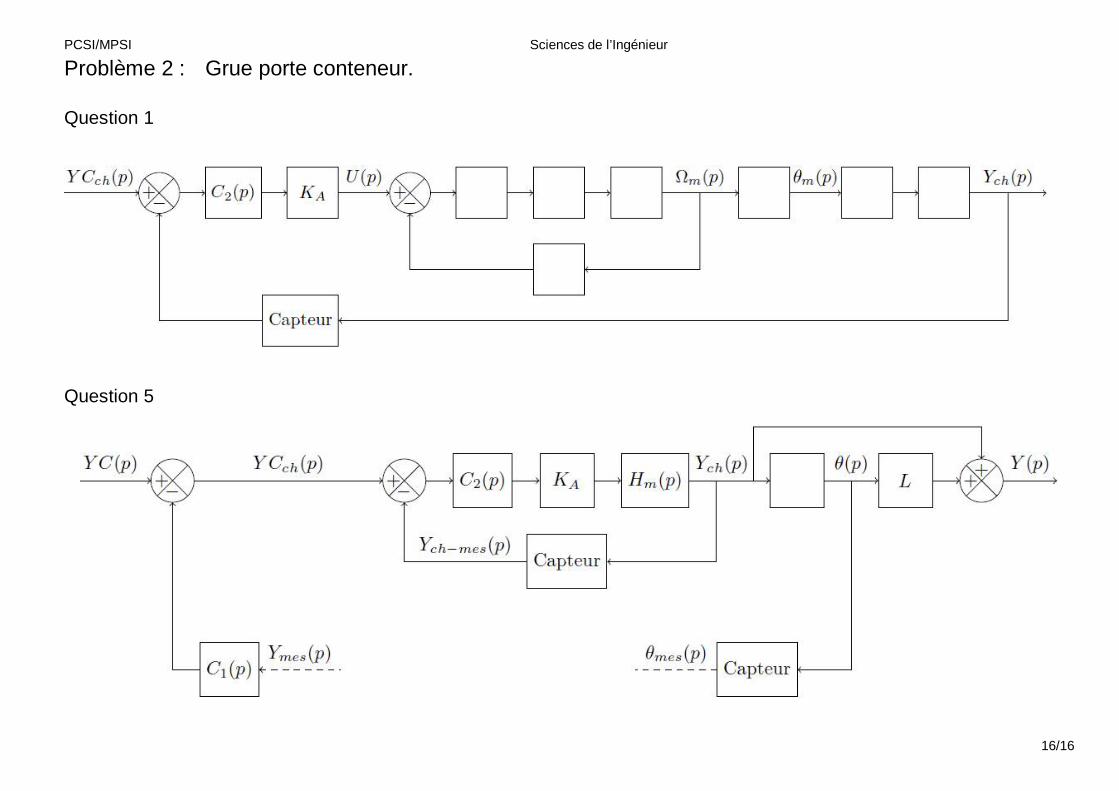
Km = 2 N.m.A−1 la constante de couple (égale à la constante de force électromotrice). Le modèle du moteur est intégré dans le schéma-bloc du document réponse, correspondant à la chaine d’asservissement en position du chariot. Q1 : Compléter le schéma-bloc du document réponse.
Q2 : Exprimer littéralement la fonction de transfert )()()(
pUppH m
m
Un correcteur proportionnel PKpC )( est adopté, avec 3PK .
Le capteur est modélisé par un gain unitaire.
Q3 : Exprimer littéralement la fonction de transfert )(
)()(pYC
pYpHch
chdir .
Préciser son ordre et son gain statique. Après application numérique, la fonction de transfert admet des racines réelles, on peut donc
la mettre sous la forme :
5,11.
4,31.
411
1)(ppp
pH dir
Q4 : Expliquer pourquoi on peut considérer que :
5,11.
4,31
1)(pp
pH dir
Mettre )( pH dir sous forme canonique 1..2
)(
2
2
pzpKpH
nn
dir
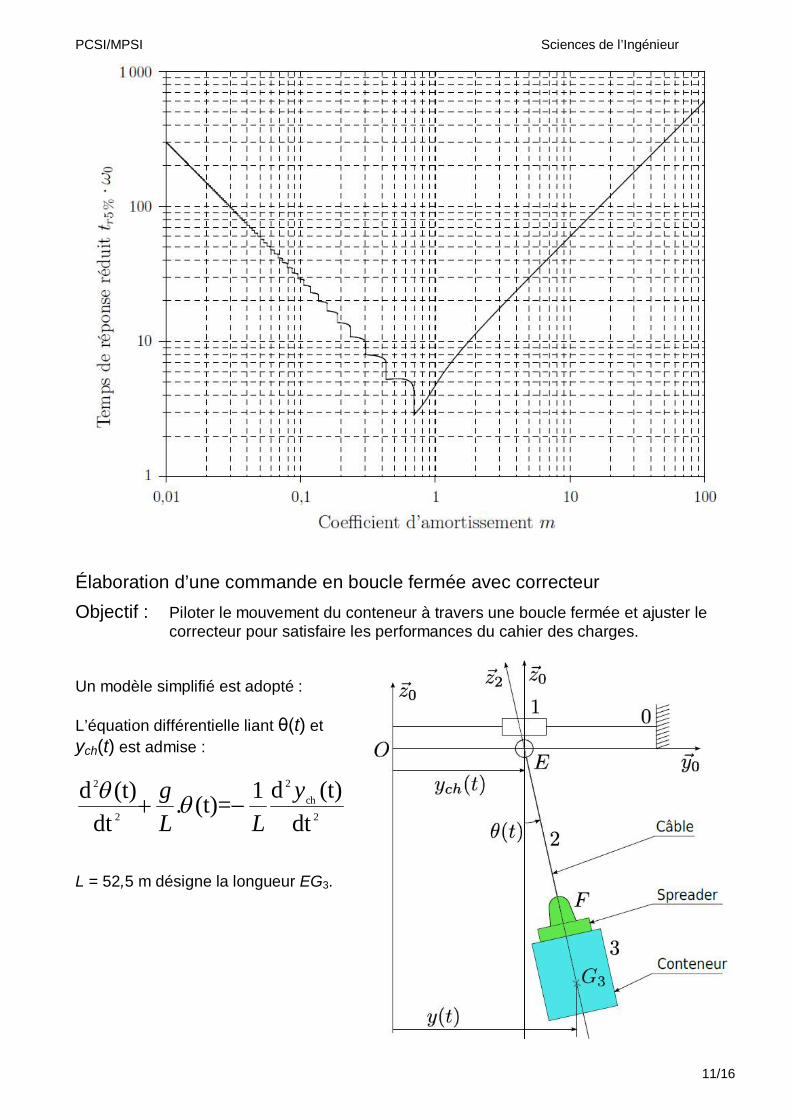
Déterminer ses coefficients caractéristiques. Tracer la réponse à un échelon unitaire. Déterminer le temps de réponse à 5% en utilisant l’abaque fourni sur la figure
suivante. Les performances du cahier des charges de stabilité, rapidité et précision sont elles respectées ?
PCSI/MPSI Sciences de l’Ingénieur
11/16
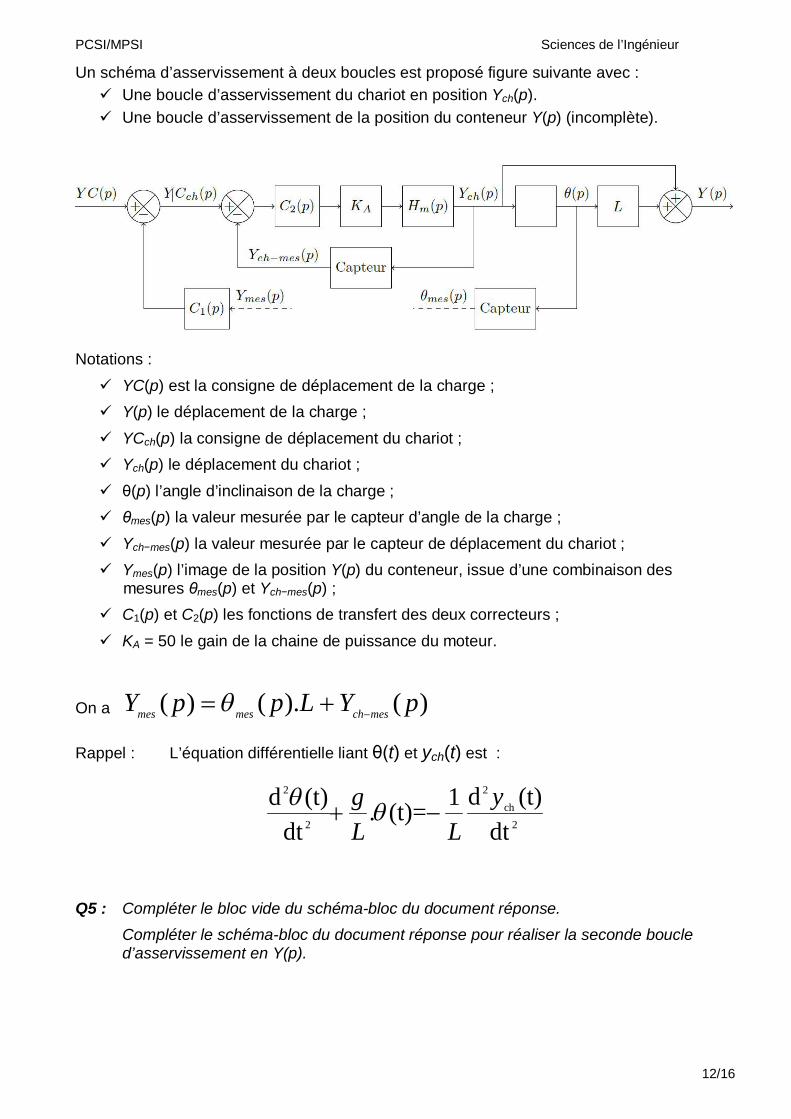
Élaboration d’une commande en boucle fermée avec correcteur Objectif : Piloter le mouvement du conteneur à travers une boucle fermée et ajuster le
correcteur pour satisfaire les performances du cahier des charges. Un modèle simplifié est adopté : L’équation différentielle liant θ(t) et ych(t) est admise :
2ch
2
2
2
dt(t)d1=(t).
dt(t)d y
LLg
L = 52,5 m désigne la longueur EG3.
PCSI/MPSI Sciences de l’Ingénieur
12/16
Un schéma d’asservissement à deux boucles est proposé figure suivante avec : Une boucle d’asservissement du chariot en position Ych(p). Une boucle d’asservissement de la position du conteneur Y(p) (incomplète).
Notations : YC(p) est la consigne de déplacement de la charge ; Y(p) le déplacement de la charge ; YCch(p) la consigne de déplacement du chariot ; Ych(p) le déplacement du chariot ; θ(p) l’angle d’inclinaison de la charge ; θmes(p) la valeur mesurée par le capteur d’angle de la charge ; Ych−mes(p) la valeur mesurée par le capteur de déplacement du chariot ; Ymes(p) l’image de la position Y(p) du conteneur, issue d’une combinaison des
mesures θmes(p) et Ych−mes(p) ; C1(p) et C2(p) les fonctions de transfert des deux correcteurs ; KA = 50 le gain de la chaine de puissance du moteur.
On a )().()( pYLppY meschmesmes Rappel : L’équation différentielle liant θ(t) et ych(t) est :
2ch
2
2
2
dt(t)d1=(t).
dt(t)d y
LLg
Q5 : Compléter le bloc vide du schéma-bloc du document réponse.
Compléter le schéma-bloc du document réponse pour réaliser la seconde boucle d’asservissement en Y(p).
PCSI/MPSI Sciences de l’Ingénieur
13/16
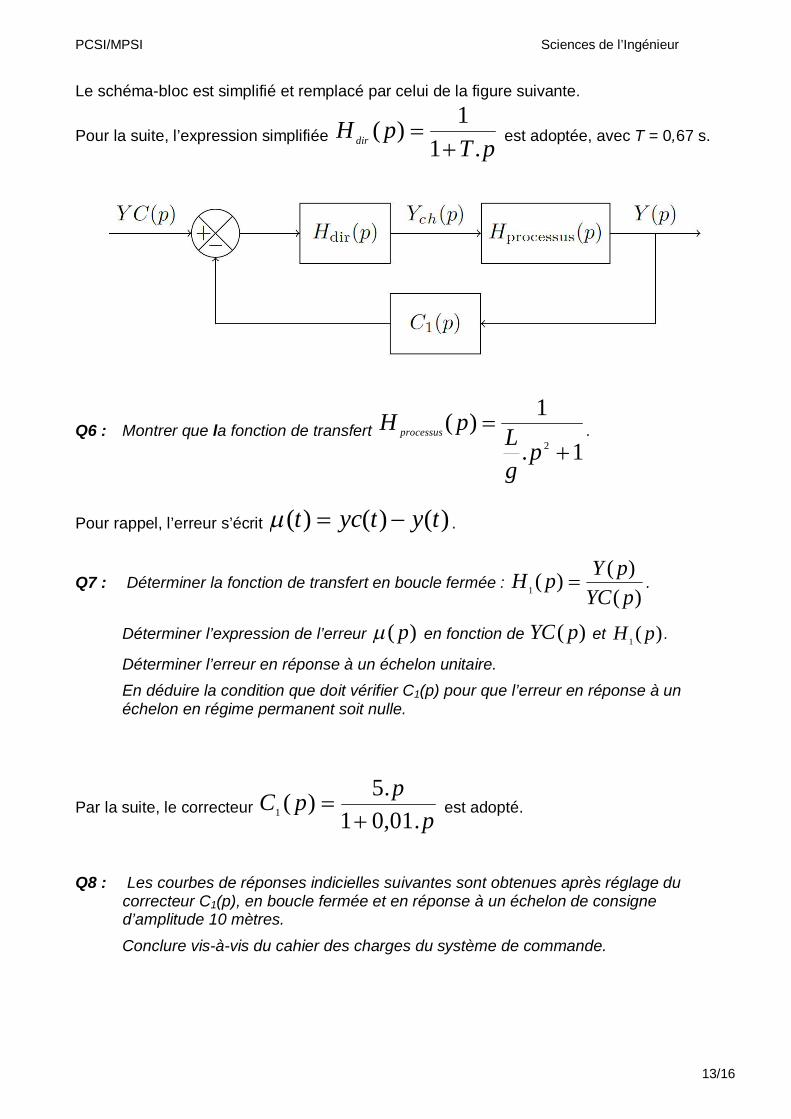
Le schéma-bloc est simplifié et remplacé par celui de la figure suivante.
Pour la suite, l’expression simplifiée pTpH dir .1
1)(
est adoptée, avec T = 0,67 s.
Q6 : Montrer que la fonction de transfert 1.
1)(2
p
gLpH processus .
Pour rappel, l’erreur s’écrit )()()( tytyct .
Q7 : Déterminer la fonction de transfert en boucle fermée : )(
)()(1 pYCpYpH .
Déterminer l’expression de l’erreur )( p en fonction de )( pYC et )(1 pH .
Déterminer l’erreur en réponse à un échelon unitaire. En déduire la condition que doit vérifier C1(p) pour que l’erreur en réponse à un échelon en régime permanent soit nulle.
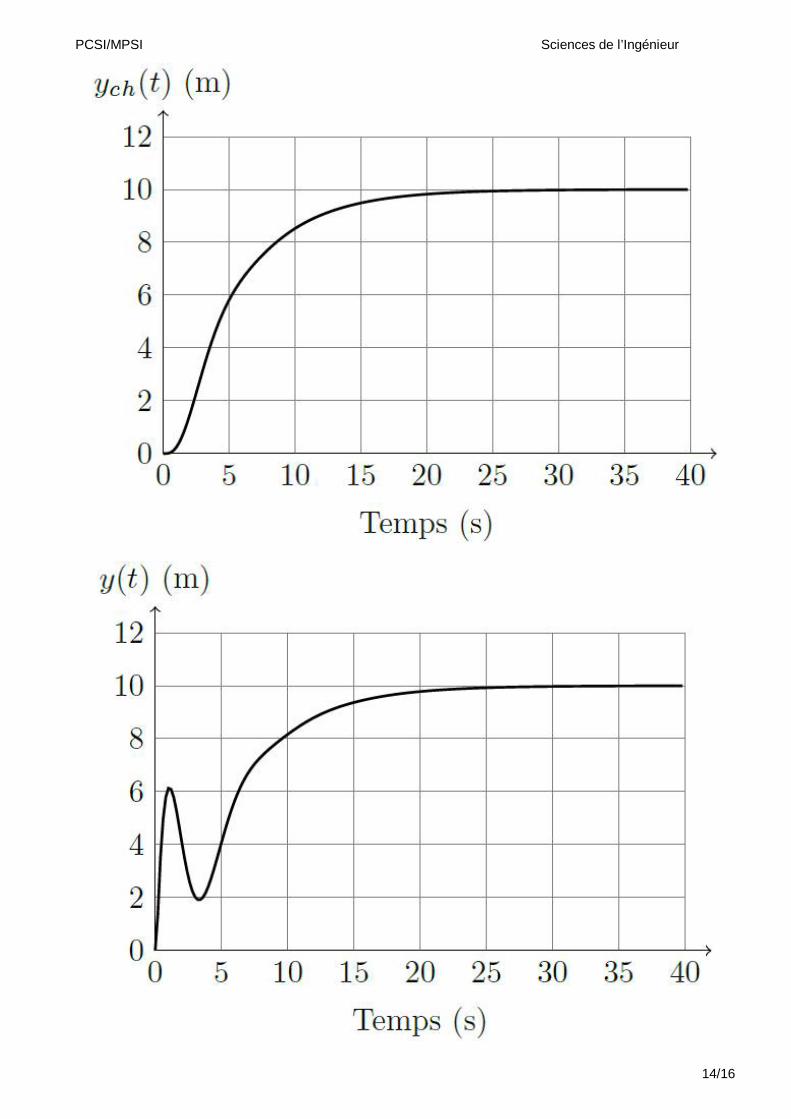
Par la suite, le correcteur pppC
.01,01.5)(1
est adopté.
Q8 : Les courbes de réponses indicielles suivantes sont obtenues après réglage du
correcteur C1(p), en boucle fermée et en réponse à un échelon de consigne d’amplitude 10 mètres.
Conclure vis-à-vis du cahier des charges du système de commande.
PCSI/MPSI Sciences de l’Ingénieur
14/16
PCSI/MPSI Sciences de l’Ingénieur
15/16
Problème 1 : Bras collaboratif Question 3
Question 4
PCSI/MPSI Sciences de l’Ingénieur
16/16
Problème 2 : Grue porte conteneur. Question 1
Question 5



![CP lecture : LE SON [p]P p P - ekladata.comekladata.com/8rqspjI5PUAzzZ4gqBPALf4yRvY.pdf · lecture : LE SON [p]P p p P CP séquence - leçon 9 1) Exercices moteurs et de latérisation](https://img.pdfslide.fr/doc/110x75/5beb033909d3f231188bf1c3/cp-lecture-le-son-pp-p-p-lecture-le-son-pp-p-p-p-cp-sequence-lecon.jpg)