Embed Size (px)
Citation preview
MPSI/PCSI Sciences de l’Ingénieur
1/15
DS de Sciences de l’Ingénieur, MPSI1, mars 2016
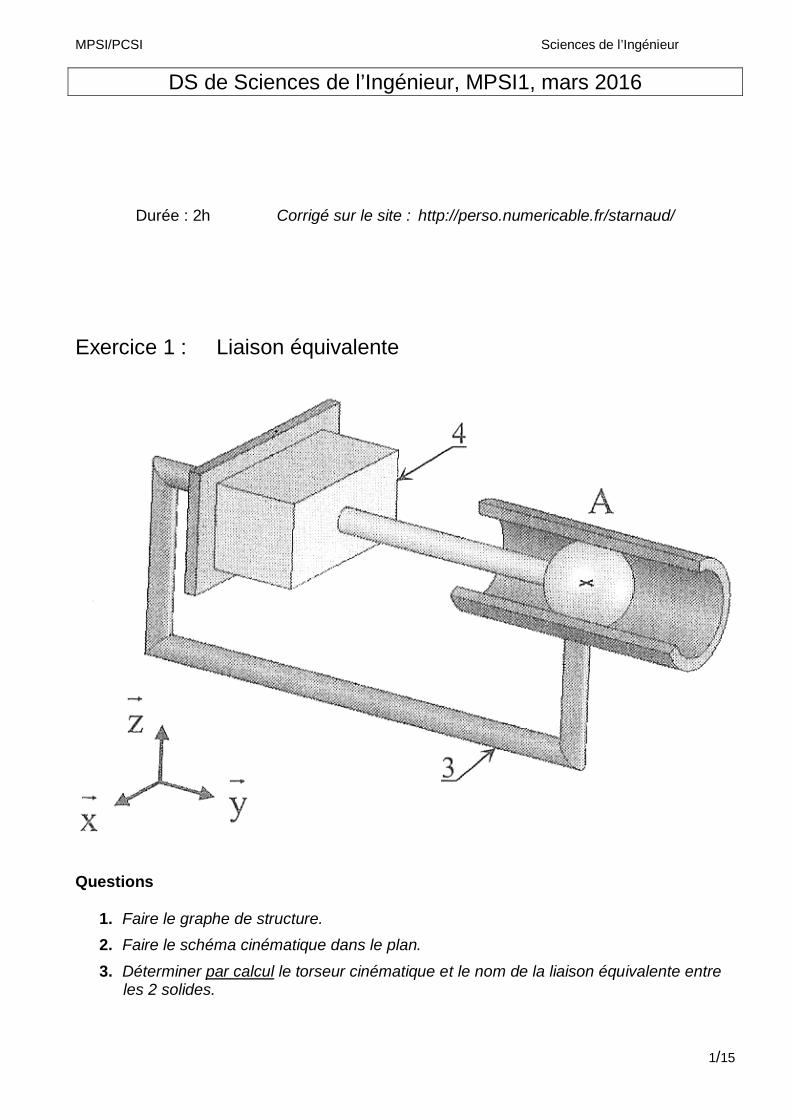
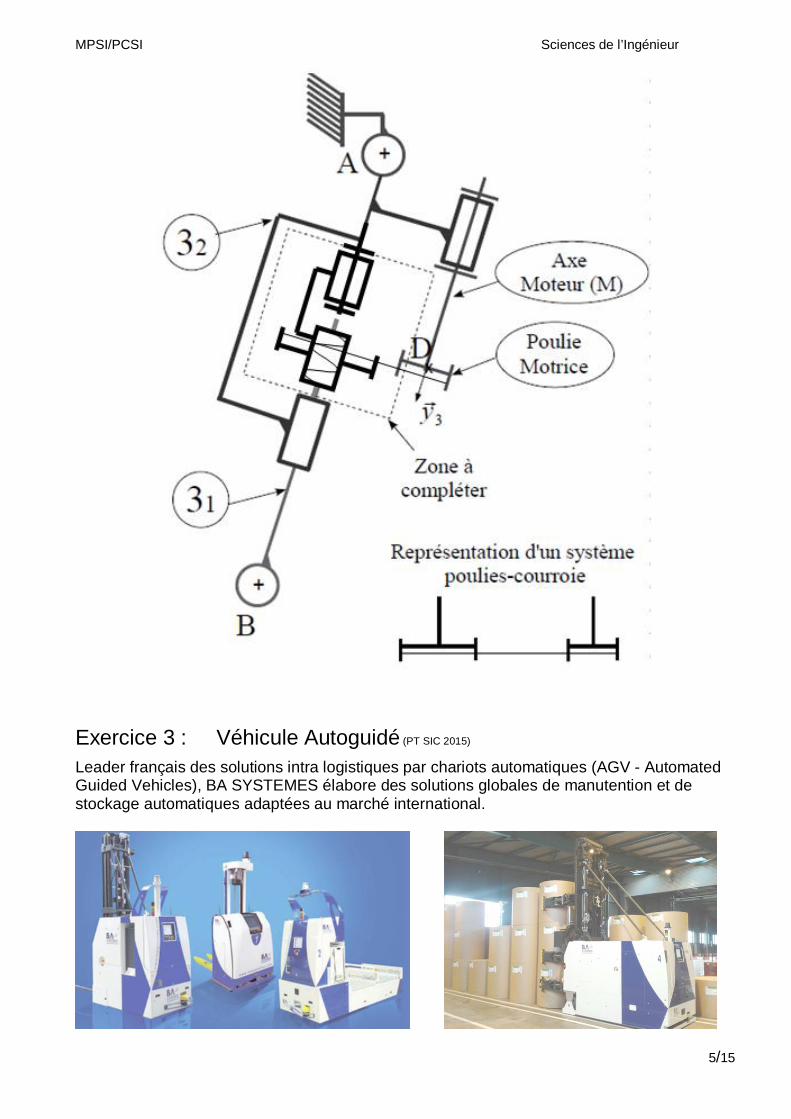
Durée : 2h Corrigé sur le site : http://perso.numericable.fr/starnaud/ Exercice 1 : Liaison équivalente
Questions
1. Faire le graphe de structure. 2. Faire le schéma cinématique dans le plan.
3. Déterminer par calcul le torseur cinématique et le nom de la liaison équivalente entre les 2 solides.
MPSI/PCSI Sciences de l’Ingénieur
2/15
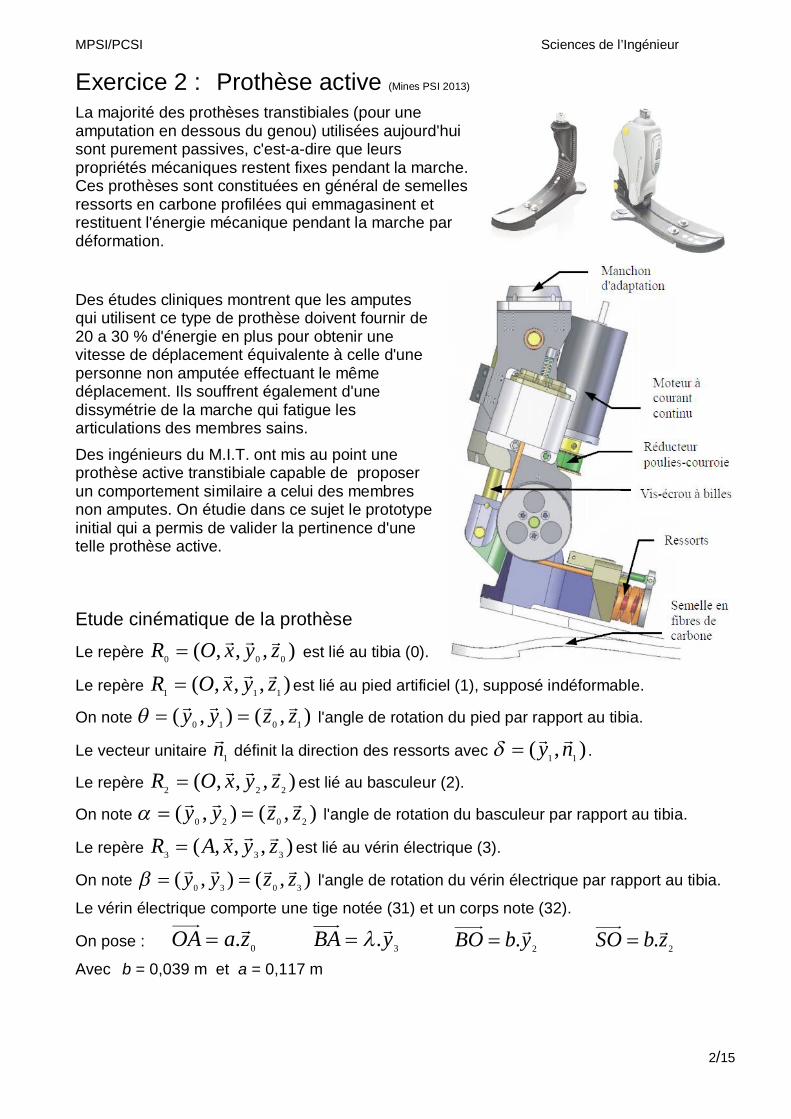
Exercice 2 : Prothèse active (Mines PSI 2013) La majorité des prothèses transtibiales (pour une amputation en dessous du genou) utilisées aujourd'hui sont purement passives, c'est-a-dire que leurs propriétés mécaniques restent fixes pendant la marche. Ces prothèses sont constituées en général de semelles ressorts en carbone profilées qui emmagasinent et restituent l'énergie mécanique pendant la marche par déformation. Des études cliniques montrent que les amputes qui utilisent ce type de prothèse doivent fournir de 20 a 30 % d'énergie en plus pour obtenir une vitesse de déplacement équivalente à celle d'une personne non amputée effectuant le même déplacement. Ils souffrent également d'une dissymétrie de la marche qui fatigue les articulations des membres sains. Des ingénieurs du M.I.T. ont mis au point une prothèse active transtibiale capable de proposer un comportement similaire a celui des membres non amputes. On étudie dans ce sujet le prototype initial qui a permis de valider la pertinence d'une telle prothèse active.
Etude cinématique de la prothèse
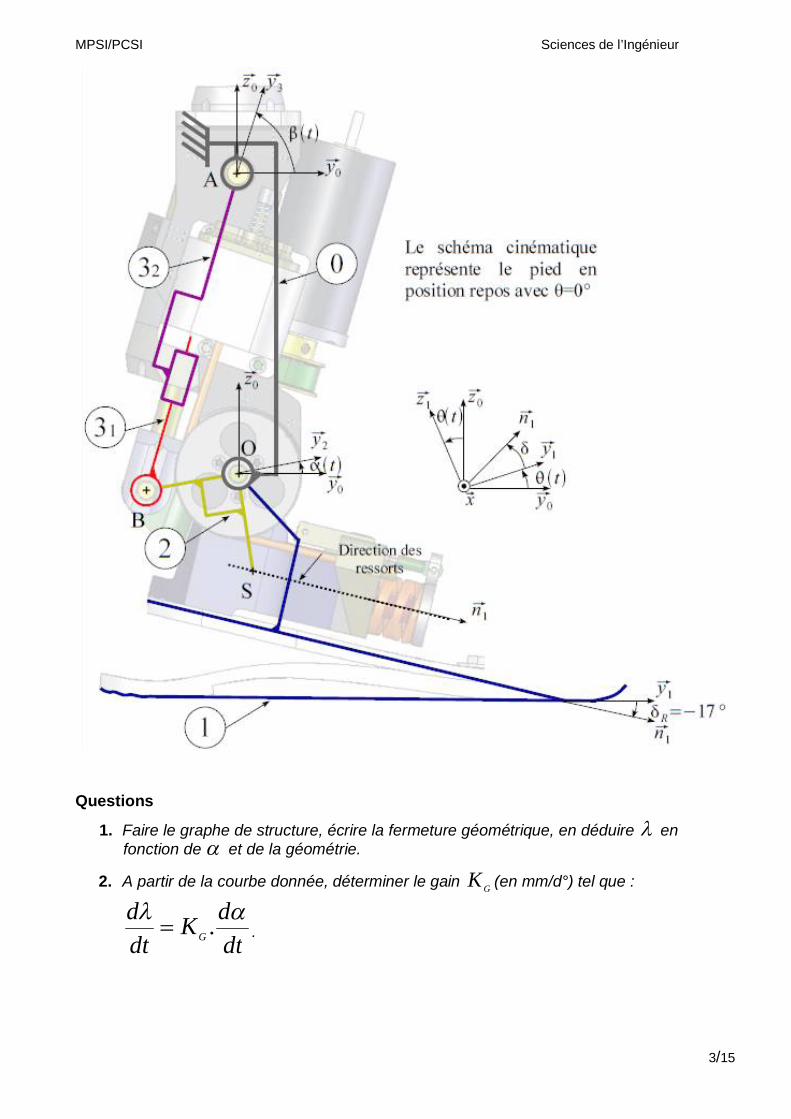
Le repère ),,,( 000 zyxOR est lié au tibia (0).
Le repère ),,,( 111 zyxOR est lié au pied artificiel (1), supposé indéformable.
On note ),(),( 1010 zzyy l'angle de rotation du pied par rapport au tibia.
Le vecteur unitaire 1n définit la direction des ressorts avec ),( 11 ny .
Le repère ),,,( 222 zyxOR est lié au basculeur (2).
On note ),(),( 2020 zzyy l'angle de rotation du basculeur par rapport au tibia.
Le repère ),,,( 333 zyxAR est lié au vérin électrique (3).
On note ),(),( 3030 zzyy l'angle de rotation du vérin électrique par rapport au tibia.
Le vérin électrique comporte une tige notée (31) et un corps note (32).
On pose : 0.zaOA 3.yBA 2.ybBO 2.zbSO
Avec b = 0,039 m et a = 0,117 m
MPSI/PCSI Sciences de l’Ingénieur
3/15
Questions
1. Faire le graphe de structure, écrire la fermeture géométrique, en déduire en fonction de et de la géométrie.
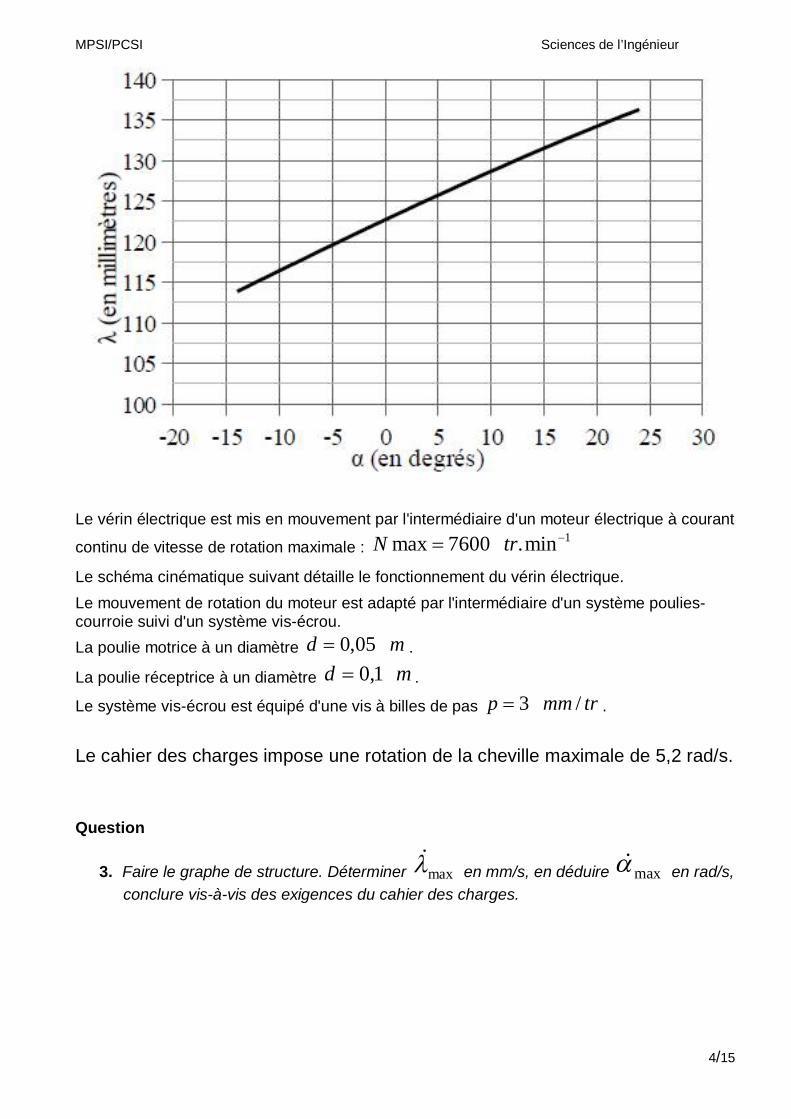
2. A partir de la courbe donnée, déterminer le gain GK (en mm/d°) tel que :
dtdK
dtd
G
. .
MPSI/PCSI Sciences de l’Ingénieur
4/15
Le vérin électrique est mis en mouvement par l'intermédiaire d'un moteur électrique à courant
continu de vitesse de rotation maximale : 1min.7600max trN
Le schéma cinématique suivant détaille le fonctionnement du vérin électrique. Le mouvement de rotation du moteur est adapté par l'intermédiaire d'un système poulies-courroie suivi d'un système vis-écrou. La poulie motrice à un diamètre md 05,0 .
La poulie réceptrice à un diamètre md 1,0 .
Le système vis-écrou est équipé d'une vis à billes de pas trmmp /3 .
Le cahier des charges impose une rotation de la cheville maximale de 5,2 rad/s. Question
3. Faire le graphe de structure. Déterminer max en mm/s, en déduire max en rad/s, conclure vis-à-vis des exigences du cahier des charges.
MPSI/PCSI Sciences de l’Ingénieur
5/15
Exercice 3 : Véhicule Autoguidé (PT SIC 2015) Leader français des solutions intra logistiques par chariots automatiques (AGV - Automated Guided Vehicles), BA SYSTEMES élabore des solutions globales de manutention et de stockage automatiques adaptées au marché international.
MPSI/PCSI Sciences de l’Ingénieur
6/15
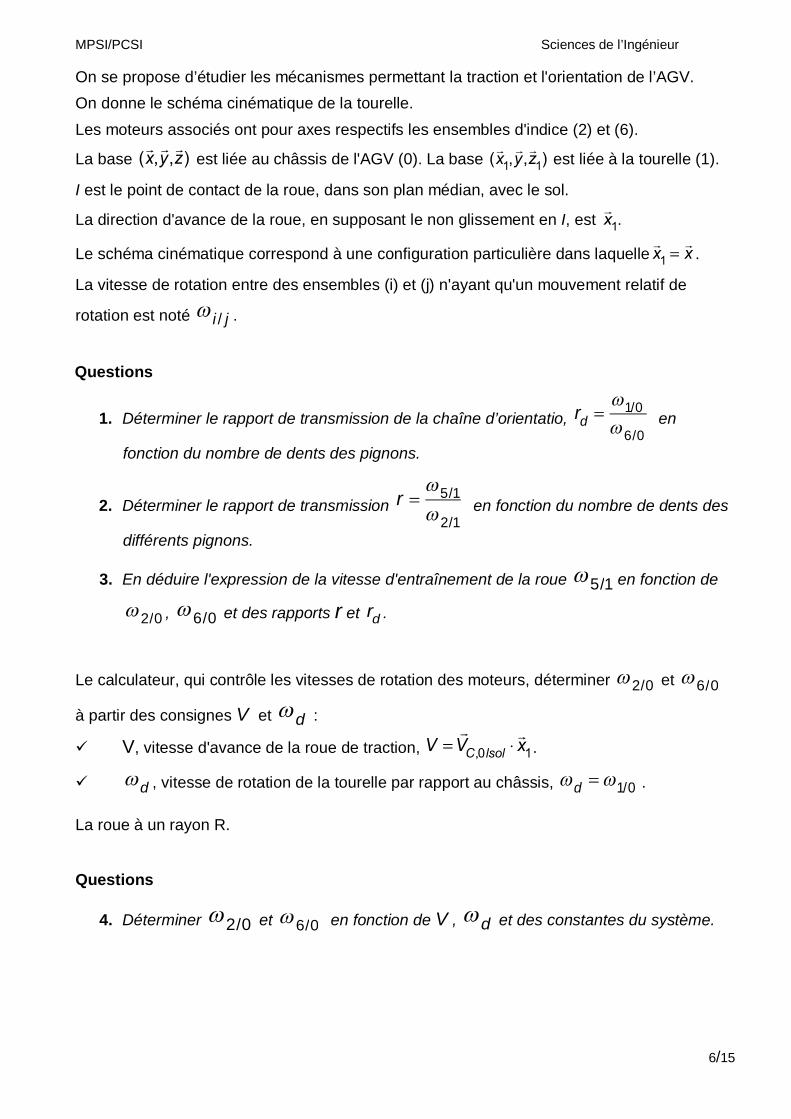
On se propose d’étudier les mécanismes permettant la traction et l'orientation de l’AGV. On donne le schéma cinématique de la tourelle. Les moteurs associés ont pour axes respectifs les ensembles d'indice (2) et (6).
La base est liée au châssis de l'AGV (0). La base est liée à la tourelle (1).
I est le point de contact de la roue, dans son plan médian, avec le sol.
La direction d'avance de la roue, en supposant le non glissement en I, est .
Le schéma cinématique correspond à une configuration particulière dans laquelle .
La vitesse de rotation entre des ensembles (i) et (j) n'ayant qu'un mouvement relatif de
rotation est noté w i / j .
Questions
1. Déterminer le rapport de transmission de la chaîne d’orientatio, rd
w1/0w6/0
en
fonction du nombre de dents des pignons.
2. Déterminer le rapport de transmission r
w5/1w2/1
en fonction du nombre de dents des
différents pignons.
3. En déduire l'expression de la vitesse d'entraînement de la roue w5/1 en fonction de
w2/0 , w6/0 et des rapports r et rd .
Le calculateur, qui contrôle les vitesses de rotation des moteurs, déterminer w2/0 et w6/0
à partir des consignes V et wd :
V, vitesse d'avance de la roue de traction, .
wd , vitesse de rotation de la tourelle par rapport au châssis, wd w1/0 . La roue à un rayon R. Questions
4. Déterminer w2/0 et w6/0 en fonction de V , wd et des constantes du système.
MPSI/PCSI Sciences de l’Ingénieur
7/15
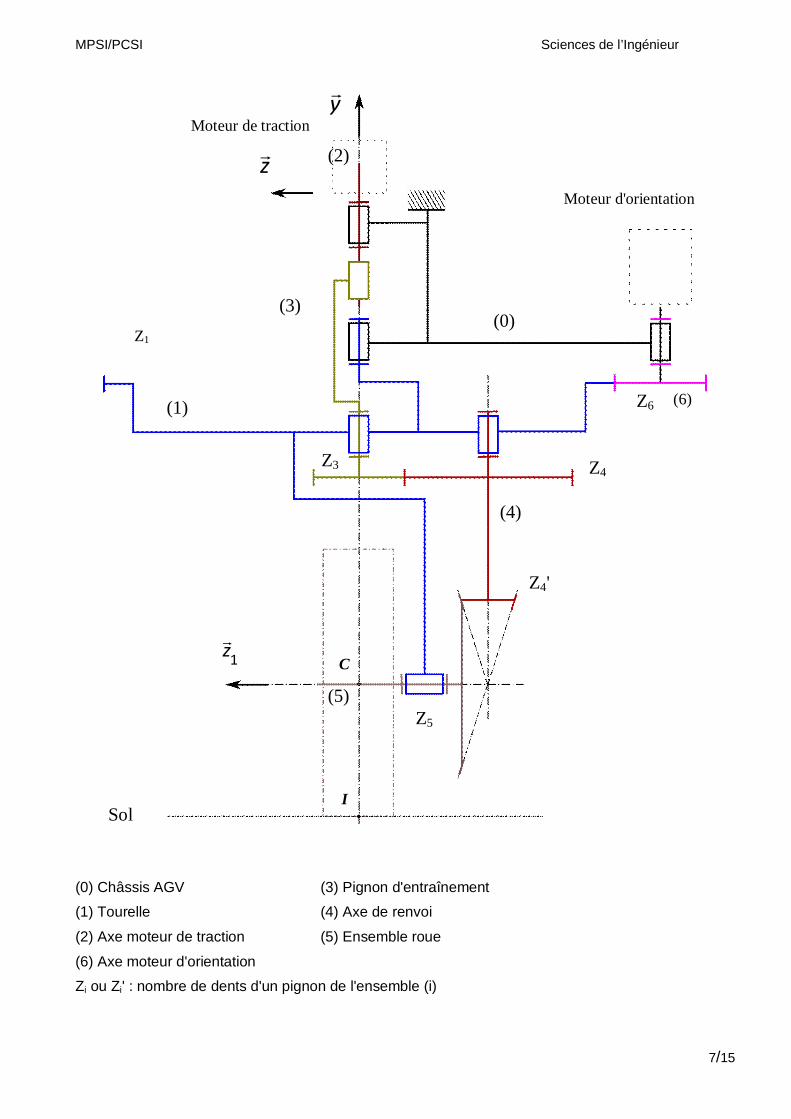
(0) Châssis AGV (3) Pignon d'entraînement
(1) Tourelle (4) Axe de renvoi
(2) Axe moteur de traction (5) Ensemble roue
(6) Axe moteur d'orientation
Zi ou Zi' : nombre de dents d'un pignon de l'ensemble (i)
(1)
(2)
(3) (0)
(4)
(5)
(6)
Moteur d'orientation
Moteur de traction
Z4'
Z4 Z3
Z5
C
I Sol
Z6
Z1
MPSI/PCSI Sciences de l’Ingénieur
8/15
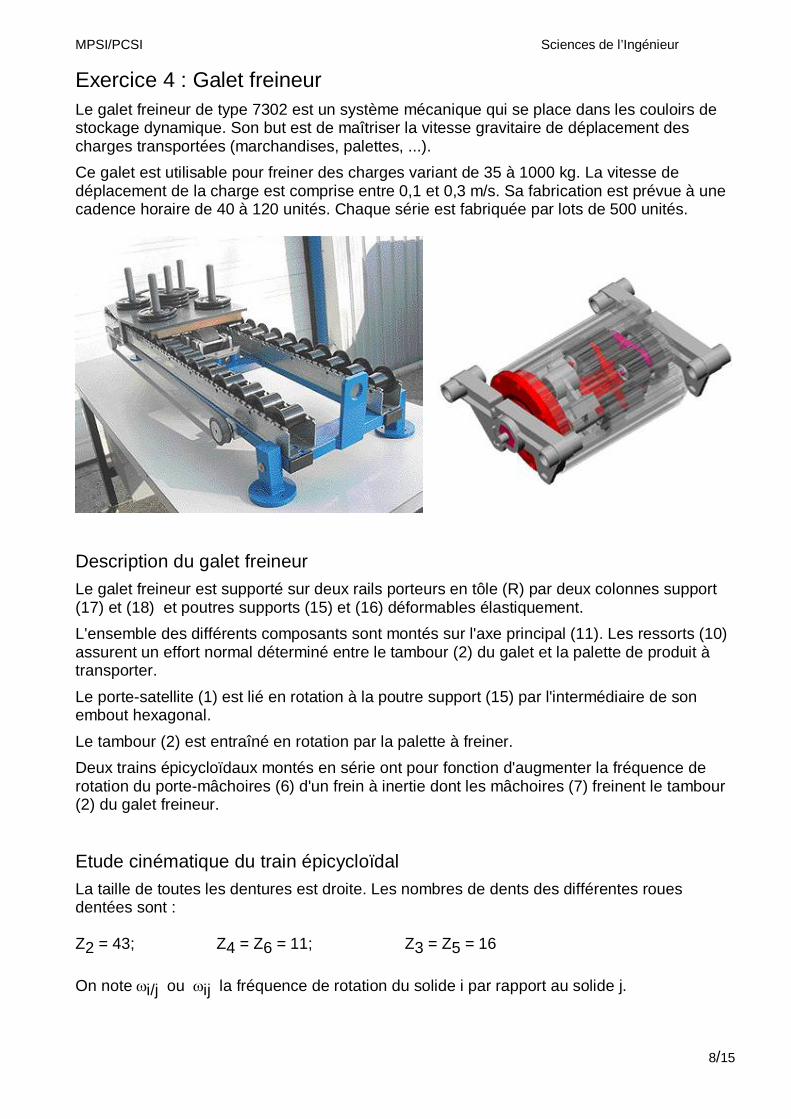
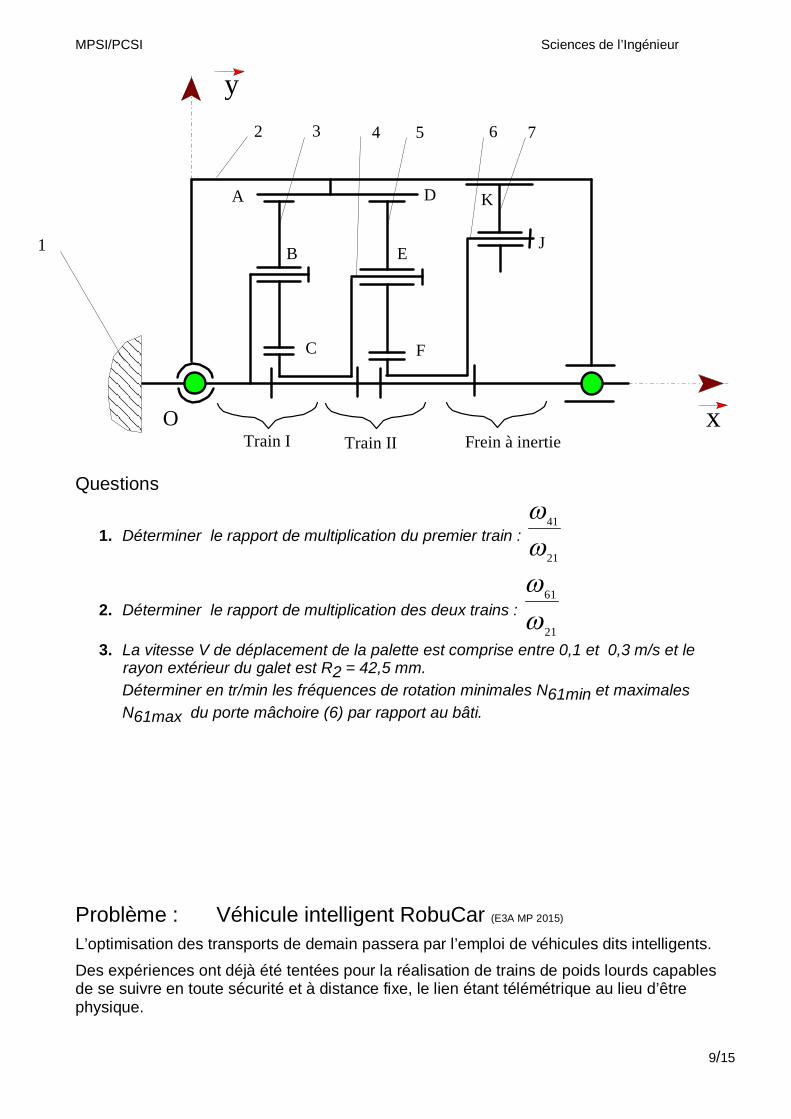
Exercice 4 : Galet freineur Le galet freineur de type 7302 est un système mécanique qui se place dans les couloirs de stockage dynamique. Son but est de maîtriser la vitesse gravitaire de déplacement des charges transportées (marchandises, palettes, ...). Ce galet est utilisable pour freiner des charges variant de 35 à 1000 kg. La vitesse de déplacement de la charge est comprise entre 0,1 et 0,3 m/s. Sa fabrication est prévue à une cadence horaire de 40 à 120 unités. Chaque série est fabriquée par lots de 500 unités.
Description du galet freineur Le galet freineur est supporté sur deux rails porteurs en tôle (R) par deux colonnes support (17) et (18) et poutres supports (15) et (16) déformables élastiquement. L'ensemble des différents composants sont montés sur l'axe principal (11). Les ressorts (10) assurent un effort normal déterminé entre le tambour (2) du galet et la palette de produit à transporter. Le porte-satellite (1) est lié en rotation à la poutre support (15) par l'intermédiaire de son embout hexagonal. Le tambour (2) est entraîné en rotation par la palette à freiner. Deux trains épicycloïdaux montés en série ont pour fonction d'augmenter la fréquence de rotation du porte-mâchoires (6) d'un frein à inertie dont les mâchoires (7) freinent le tambour (2) du galet freineur. Etude cinématique du train épicycloïdal La taille de toutes les dentures est droite. Les nombres de dents des différentes roues dentées sont : Z2 = 43; Z4 = Z6 = 11; Z3 = Z5 = 16 On note i/j ou ij la fréquence de rotation du solide i par rapport au solide j.
MPSI/PCSI Sciences de l’Ingénieur
9/15
O
C
B
A
F
E
D
y
x
1
2 3 4 5 6 7
J
K
Train I Train II Frein à inertie
Questions
1. Déterminer le rapport de multiplication du premier train : 21
41
ww
2. Déterminer le rapport de multiplication des deux trains : 21
61
ww
3. La vitesse V de déplacement de la palette est comprise entre 0,1 et 0,3 m/s et le rayon extérieur du galet est R2 = 42,5 mm. Déterminer en tr/min les fréquences de rotation minimales N61min et maximales N61max du porte mâchoire (6) par rapport au bâti.
Problème : Véhicule intelligent RobuCar (E3A MP 2015) L’optimisation des transports de demain passera par l’emploi de véhicules dits intelligents. Des expériences ont déjà été tentées pour la réalisation de trains de poids lourds capables de se suivre en toute sécurité et à distance fixe, le lien étant télémétrique au lieu d’être physique.
MPSI/PCSI Sciences de l’Ingénieur
10/15
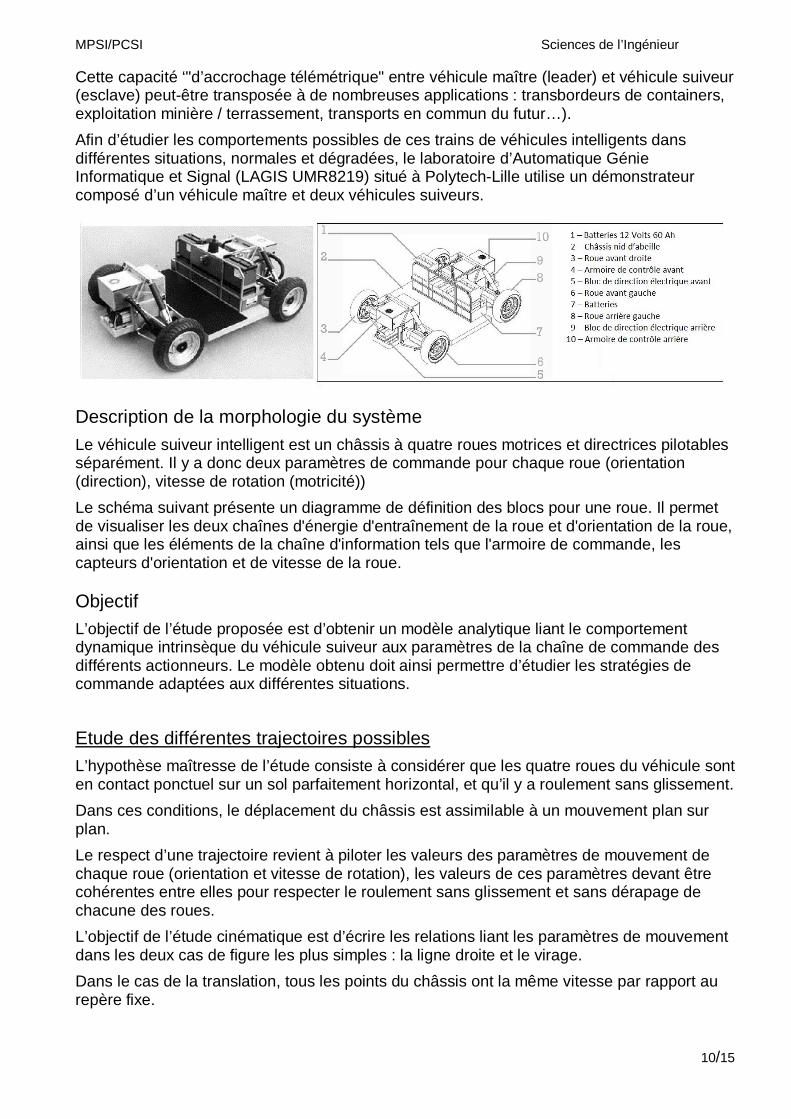
Cette capacité ‘"d’accrochage télémétrique" entre véhicule maître (leader) et véhicule suiveur (esclave) peut-être transposée à de nombreuses applications : transbordeurs de containers, exploitation minière / terrassement, transports en commun du futur…). Afin d’étudier les comportements possibles de ces trains de véhicules intelligents dans différentes situations, normales et dégradées, le laboratoire d’Automatique Génie Informatique et Signal (LAGIS UMR8219) situé à Polytech-Lille utilise un démonstrateur composé d’un véhicule maître et deux véhicules suiveurs.
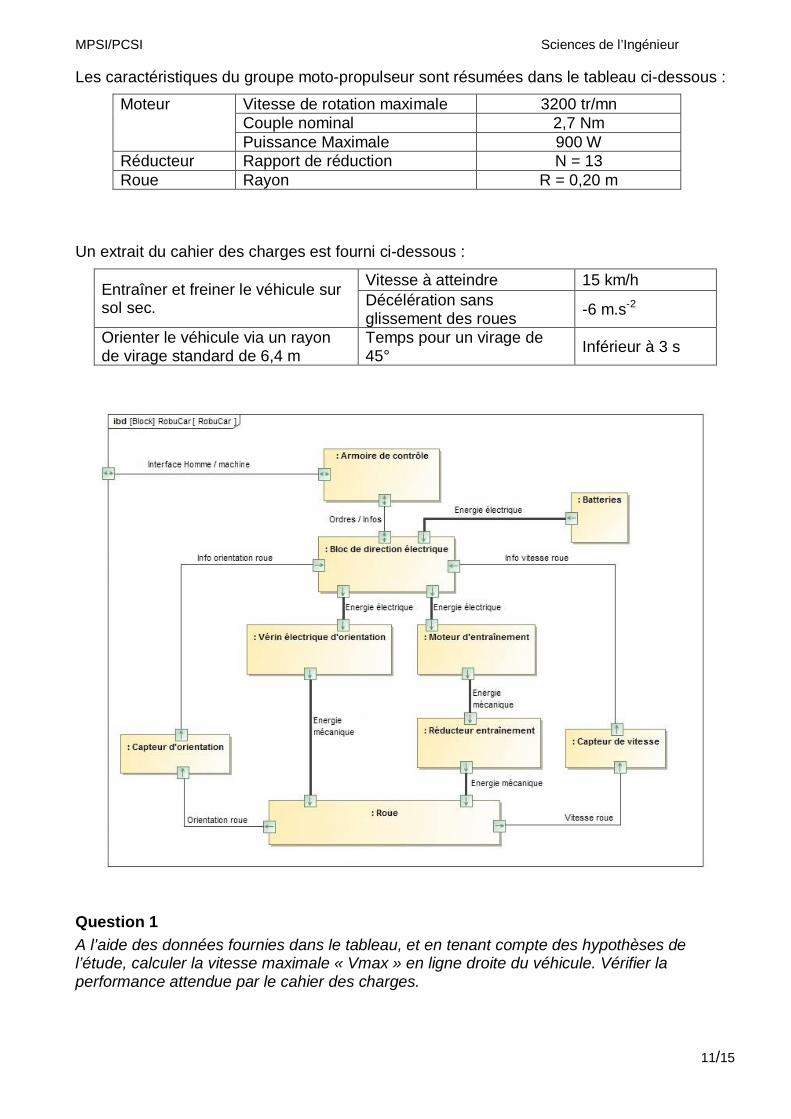
Description de la morphologie du système Le véhicule suiveur intelligent est un châssis à quatre roues motrices et directrices pilotables séparément. Il y a donc deux paramètres de commande pour chaque roue (orientation (direction), vitesse de rotation (motricité)) Le schéma suivant présente un diagramme de définition des blocs pour une roue. Il permet de visualiser les deux chaînes d'énergie d'entraînement de la roue et d'orientation de la roue, ainsi que les éléments de la chaîne d'information tels que l'armoire de commande, les capteurs d'orientation et de vitesse de la roue. Objectif L’objectif de l’étude proposée est d’obtenir un modèle analytique liant le comportement dynamique intrinsèque du véhicule suiveur aux paramètres de la chaîne de commande des différents actionneurs. Le modèle obtenu doit ainsi permettre d’étudier les stratégies de commande adaptées aux différentes situations.
Etude des différentes trajectoires possibles L’hypothèse maîtresse de l’étude consiste à considérer que les quatre roues du véhicule sont en contact ponctuel sur un sol parfaitement horizontal, et qu’il y a roulement sans glissement. Dans ces conditions, le déplacement du châssis est assimilable à un mouvement plan sur plan. Le respect d’une trajectoire revient à piloter les valeurs des paramètres de mouvement de chaque roue (orientation et vitesse de rotation), les valeurs de ces paramètres devant être cohérentes entre elles pour respecter le roulement sans glissement et sans dérapage de chacune des roues. L’objectif de l’étude cinématique est d’écrire les relations liant les paramètres de mouvement dans les deux cas de figure les plus simples : la ligne droite et le virage. Dans le cas de la translation, tous les points du châssis ont la même vitesse par rapport au repère fixe.
MPSI/PCSI Sciences de l’Ingénieur
11/15
Les caractéristiques du groupe moto-propulseur sont résumées dans le tableau ci-dessous :
Moteur Vitesse de rotation maximale 3200 tr/mn Couple nominal 2,7 Nm Puissance Maximale 900 W
Réducteur Rapport de réduction N = 13 Roue Rayon R = 0,20 m
Un extrait du cahier des charges est fourni ci-dessous :
Entraîner et freiner le véhicule sur sol sec.
Vitesse à atteindre 15 km/h Décélération sans glissement des roues -6 m.s-2
Orienter le véhicule via un rayon de virage standard de 6,4 m
Temps pour un virage de 45° Inférieur à 3 s
Question 1 A l’aide des données fournies dans le tableau, et en tenant compte des hypothèses de l’étude, calculer la vitesse maximale « Vmax » en ligne droite du véhicule. Vérifier la performance attendue par le cahier des charges.
MPSI/PCSI Sciences de l’Ingénieur
12/15
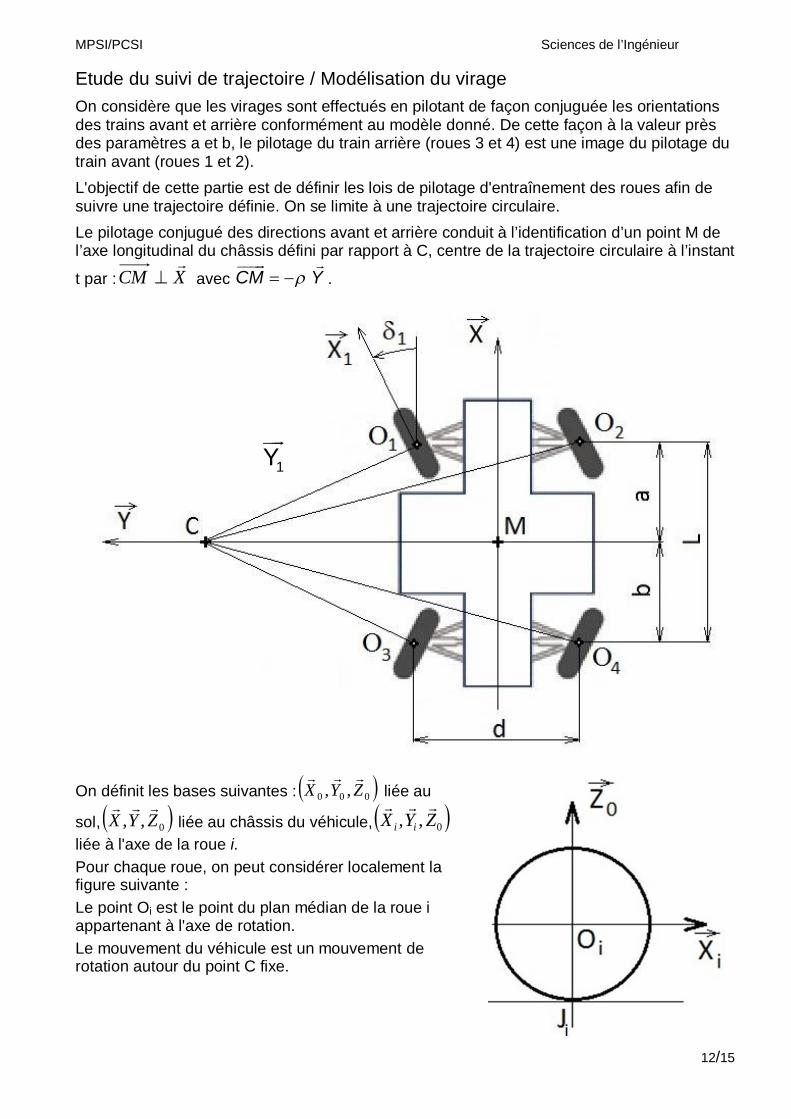
Etude du suivi de trajectoire / Modélisation du virage On considère que les virages sont effectués en pilotant de façon conjuguée les orientations des trains avant et arrière conformément au modèle donné. De cette façon à la valeur près des paramètres a et b, le pilotage du train arrière (roues 3 et 4) est une image du pilotage du train avant (roues 1 et 2). L'objectif de cette partie est de définir les lois de pilotage d'entraînement des roues afin de suivre une trajectoire définie. On se limite à une trajectoire circulaire. Le pilotage conjugué des directions avant et arrière conduit à l’identification d’un point M de l’axe longitudinal du châssis défini par rapport à C, centre de la trajectoire circulaire à l’instant
t par : XCM
avec CM Y
.
On définit les bases suivantes : 000 ,, ZYX
liée au
sol, 0,, ZYX
liée au châssis du véhicule, 0,, ZYX ii
liée à l'axe de la roue i. Pour chaque roue, on peut considérer localement la figure suivante : Le point Oi est le point du plan médian de la roue i appartenant à l'axe de rotation. Le mouvement du véhicule est un mouvement de rotation autour du point C fixe.
1Y

MPSI/PCSI Sciences de l’Ingénieur
13/15
On note que le taux de changement d’orientation du châssis par rapport au repère fixe lié au
sol, dû à la trajectoire circulaire autour de C est : 00/ ZRS
.Soit :
/i i iRoue axe roue i Y
: vitesse de rotation de la roue i par rapport à l'axe de la roue i. R : la valeur du rayon des roues. Questions
2. Donner l'expression vectorielle dans la base 0,, ZYX
de 1 /V O S Sol
et
2 /
V O S Sol en fonction de , , et a d .
3. Donner l'expression vectorielle dans la base 0, ,i iX Y Z
de 1 1 /V O Roue Sol
et
2 2 /V O Roue Sol
en fonction de et iR .
4. En remarquant que 1 1 / 0V O Roue chassis
, établir deux relations scalaires
après projection dans la base 0,, ZYX
.
5. Faire de même pour la roue 2.
6. En déduire les expressions de tan(δ1) et de tan(δ2) en fonction de ρ, a et d. Effectuer l'application numérique. a = 0,65 m ; d = 1,2 m ; ρ = 5 m.
7. Etant donné les valeurs de δ1 et δ2, on adopte la simplification suivante : cos 1i et
sin 0i . En déduire les expressions simplifiées de 1 et de 2 . Etude du taux de rotation des roues 1 et 2 au cours d’un virage L’objectif de cette partie est d’établir les lois de commande et de valider le cahier des charges du point de vue du temps de virage de 45°. On souhaite conserver V (module de la vitesse du point M centre du châssis) constant au cours d’un changement de direction de 45°. Le scénario retenu pour piloter un virage imposé par le suivi de trajectoire est décomposé en cinq phases :
● t < t0 : translation rectiligne ● t0 < t < t1 : mouvement transitoire ● t1 < t < t2 : mouvement de rotation autour de C ● t2 < t < t3 : mouvement transitoire ● t3 < t : translation rectiligne
On définit / .XV M Chassis S sol V
avec le vecteur X
lié au véhicule donc mobile par rapport au sol.
C représente la valeur de consigne et est directement calculée par CV
, avec le
rayon de virage imposée par le parcours à l’instant t et V la vitesse du point M au même instant t .
MPSI/PCSI Sciences de l’Ingénieur
14/15
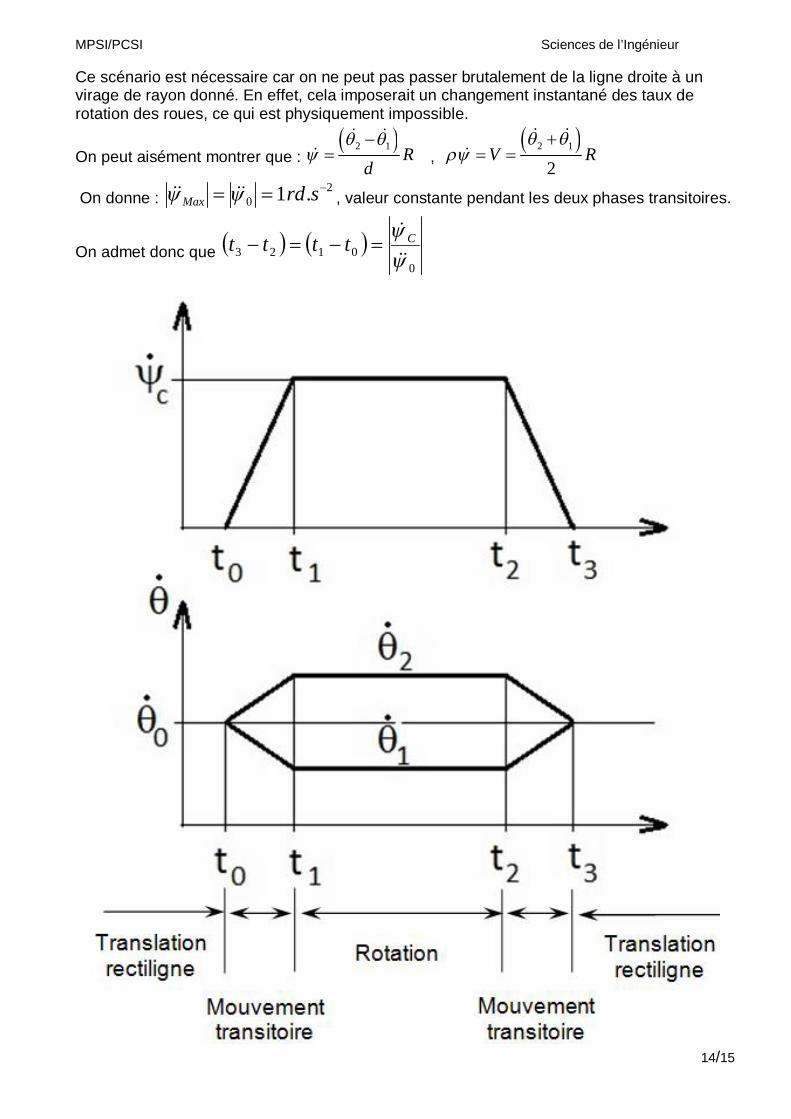
Ce scénario est nécessaire car on ne peut pas passer brutalement de la ligne droite à un virage de rayon donné. En effet, cela imposerait un changement instantané des taux de rotation des roues, ce qui est physiquement impossible.
On peut aisément montrer que : 2 1 R
d
, 2 1
2V R
On donne : 2
0 .1 srdMax , valeur constante pendant les deux phases transitoires.
On admet donc que 0
0123
Ctttt

MPSI/PCSI Sciences de l’Ingénieur
15/15
Questions
8. Pour chaque phase 1; ii tt , on se propose de donner l’expression permettant de calculer la valeur instantanée de t , t , t sous forme d’un tableau. Déterminer les expressions de A, B, C et D qui apparaissent dans le tableau suivant :
10; tt 21;tt 32; tt
t 00 ttV
tV
C
Vcste
20 ttV
tV
C
t 0 20 /1 srd 0 2
0 /1 srd 0
t 0 00 ttt A C 0
t 0 2
20
0ttt
B D 0
9. En déduire l’expression littérale du changement d’orientation total effectué TOT en
fonction de 0 , C , 12 tt
10. Calculer 12 tt pour un virage à gauche de rayon 6,4 m effectué à hkmV /10 provoquant un changement d’orientation de 45°.
11. En déduire le temps total 03 tt nécessaire pour effectuer ce changement de direction.
12. Dans ces conditions et pour 00 t , calculer 1t , 2t , 3t , 1t , 2t et vérifier que la valeur de la durée du virage de 45° valide bien le cahier des charges.





























