Embed Size (px)
Citation preview

9. Espaces préhilbertiens et euclidiens
II - Espaces préhilbertiens réels ou complexes
1) Produit scalaire — Norme associée : cf. chapitre 5 § I-5)
2) Orthogonalité
Définitions : soit E un K-espace vectoriel, muni d’un produit scalaire (·|·) et ‖·‖ la norme associée.
• Un vecteur x de E est dit unitaire (ou normé) si et seulement s’il est de norme 1.
• Deux vecteurs x, y de E sont dits orthogonaux si et seulement si (x|y) = 0.
• Une famille (xi)i∈I de vecteurs de E est dite orthogonale si et seulement si les xi sont orthogonauxdeux à deux :
∀ (i, j) ∈ I2 i �= j ⇒ (xi|xj) = 0 .
• Une famille (xi)i∈I de vecteurs de E est dite orthonormale (ou orthonormée) si et seulement si lesxi sont unitaires et orthogonaux deux à deux :
∀ (i, j) ∈ I2 (xi|xj) = δi,j .
• Si F est un sous-espace vectoriel de E, on appelle orthogonal de F l’ensemble, noté F⊥ (ou F 0),des vecteurs de E orthogonaux à tous ceux de F :
F⊥ = {x ∈ E / ∀y ∈ F (x|y) = 0}• Deux sous-espaces F et G de E sont dits orthogonaux si et seulement si tout vecteur de l’un est
orthogonal à tout vecteur de l’autre (i.e. ∀ (y, z) ∈ F ×G (y|z) = 0).
NB : F et G sont dits perpendiculaires si et seulement si F⊥ et G⊥ sont orthogonaux.
Propriétés :
1) Toute famille orthogonale de vecteurs non nuls est libre.
2) Toute famille orthonormale est libre.
3) Si F,G sont deux sous-espaces de E :
∗ F⊥ est un sous-espace vectoriel de E et F ∩ F⊥ = {0} ;
∗ F ⊂ F⊥⊥ ;
∗ F ⊂ G⇒ G⊥ ⊂ F⊥ ;
∗ F,G orthogonaux ⇔ F ⊂ G⊥ ⇔ G ⊂ F⊥ ;
4) Des sous-espaces vectoriels orthogonaux deux à deux sont en somme directe.
Attention ! Si F est de dimension infinie, on peut avoir F � F⊥⊥, F et F⊥ ne sont pas toujourssupplémentaires. Pour F de dimension finie, voir 4).
(cf. F = R [X] dans E = C0 ([0, 1] ,R) muni du produit scalaire (f, g) �→∫ 1
0f.g ; le
théorème de Weierstrass permet de montrer que F⊥ = {0} et donc F⊥⊥ = E).
Théorème de Pythagore : si x et y sont orthogonaux, alors : ‖x+ y‖2 = ‖x‖2 + ‖y‖2.Attention ! Réciproque vraie si K = R, mais fausse si K = C.
NB : par récurrence, on obtient, pour (xi)i∈I famille orthogonale finie :
∥∥∥∥∥
∑
i∈I
xi
∥∥∥∥∥
2
=∑
i∈I
‖xi‖2.

9. Espaces préhilbertiens et euclidiens Page 2
3) Orthonormalisation de Gram-Schmidt
Théorème : soient (e1, . . . , en) une famille libre de vecteurs de E et les sous-espaces associés :
∀k ∈ [[1, n]] Fk = Vect (e1, . . . , ek) .
Il existe une unique famille orthonormale (ε1, . . . , εn) de vecteurs de E telle que :
∀k ∈ [[1, n]] Vect (ε1, . . . , εk) = Fk et (εk|ek) ∈ R+∗. (1)
De plus :
∀k ∈ [[1, n]] εk =1
‖vk‖· vk où vk = ek −
k−1∑
j=1
(vj|ek)(vj|vj)
· vj = ek −k−1∑
j=1
(εj|ek) .εj (v1 = e1) (2)
Dém. Analyse : nécessairement, ε1 = λ1.e1 avec |λ1| =1
‖v1‖et λ1 =
1
(ε1|e1)∈ R+∗ donc λ1 =
1
‖v1‖;
ainsi : ε1 =1
‖v1‖· v1 où v1 = e1.
Supposons connus ε1, . . . , εk−1 (2 ≤ k ≤ n) vérifiant les conditions requises ; alors (ε1, . . . , εk−1) est unebase de Fk−1 et donc Fk = Vect (ek)⊕ Fk−1; par conséquent, εk est nécessairement de la forme :
εk = λk.ek +k−1∑
j=1
µj.εj
et, pour i ∈ [[1, k − 1]], la condition (εi|εk) = 0 donne : 0 = λk. (εi|ek) + µi d’où : µi = −λk. (εi|ek) ;ainsi εk = λk.vk avec vk tel qu’il est défini dans (2) ; nécessairement vk �= 0 et
|λk| =1
‖vk‖et λk =
1
(εk|ek)∈ R+∗ donc λk =
1
‖vk‖Synthèse : (2) définit bien par récurrence les familles (vk) et (εk) (on a bien vk �= 0 car ek /∈ Fk−1) ; ilest aisé de vérifier que la famille (εk) ainsi obtenue convient ; elle est unique d’après l’analyse.
NB : en pratique, on détermine la famille orthogonale (v1, . . . , vn) puis on normalise si nécessaire ; lerésultat peut être étendu à une suite de vecteurs (par exemple dans K [X]).
Exemple : dans E = R [X] muni du produit scalaire (P,Q) �→∫ 1−1 PQ, l’orthogonalisation la famille
(1, X,X2, X3
)donne
(1,X,X2 − 1
3,X3 − 3
5X
)(cf. les polynômes de Legendre :
dn
dxn[(
x2 − 1)n]).
Corollaire : tout espace préhilbertien de dimension finie admet des bases orthonormales.
4) Projection orthogonale sur un sous-espace de dimension finieThéorème et définition : soient E un espace préhilbertien et F un sous-espace de dimension finie
de E ; l’orthogonal F⊥ de F est un supplémentaire de F , appelé le supplémentaire orthogonal de F ;la projection pF de E sur F parallèlement à F⊥ est la projection orthogonale sur F .En outre, si (ε1, . . . , εn) est une base orthonormale de F , on a :
∀x ∈ E pF (x) =n∑
j=1
(εj |x) .εj
Enfin, F⊥⊥ = F et IE − pF est la projection orthogonale sur F⊥.
NB : y = pF (x) est caractérisé par(y ∈ F et x− y ∈ F⊥
)avec en outre, si F = Vect (ε1, . . . , εn),
z ∈ F⊥ ⇔ ∀i ∈ Nn (εi|z) = 0 ;
si l’on écrit y =n∑
j=1λj.εj , ces conditions redonnent les valeurs des λj , immédiatement si (ε1, . . . , εn)
est une base orthonormale (à la rigueur orthogonale) de F , au prix de la résolution d’un systèmede n équations à n inconnues sinon.On remarquera que, dans l’algorithme de Schmidt, avec les notations du paragraphe précédent,
vk = ek − pFk−1 (ek) .

9. Espaces préhilbertiens et euclidiens Page 3
Dém. du théorème Fixons une base orthonormale (ε1, . . . , εn) de F (il en existe d’après le paragrapheprécédent !). Compte tenu de la remarque précédente, il est facile de vérifier que, pour tout x de E, enposant
y =n∑
j=1
(εj |x) .εj et z = x− y,
j’ai x = y + z avec y ∈ F et z ∈ F⊥ ; il en résulte que E = F + F⊥, or je sais déjà que F ∩ F⊥ = {0},donc F⊥ est bien un supplémentaire de F et l’expression de y = pF (x) est déjà apparue.Je sais déjà que F ⊂ F⊥⊥. Posons G = F⊥ ; j’ai F ⊂ G⊥, il reste à prouver que G⊥ ⊂ F . Soit doncx ∈ G⊥ et y = pF (x) ; y est dans F , donc dans G⊥ ; ainsi z = x− y ∈ G ∩ G⊥, donc z = 0 et il enrésulte que x = y d’où x ∈ F .
Corollaire : distance d’un point à un sous-espace F de dimension finie.
Soit x ∈ E, l’application de F dans R qui à u ∈ F associe ‖x− u‖ atteint son minimumd (x, F ) en un point et un seul, à savoir pF (x). On a :
d (x,F ) = ‖x− pF (x)‖ et d (x,F )2 =(x|x− pF (x)
)= ‖x‖2 − ‖pF (x)‖2 .
Dém. Soient y = pF (x) et z = x−y ; pour tout u de F , x−u = (y − u)+z avec y−u et z orthogonaux.J’ai donc, grâce au théorème de Pythagore :
‖x− u‖2 = ‖y − u‖2 + ‖z‖2 ;
le minimum est ‖z‖2, atteint pour u = y (et seulement en ce point) ; enfin, x− y étant orthogonal à y,
‖z‖2 = (x− y|x− y) = (x|x− y)
et ‖x‖2 = ‖y‖2 + ‖z‖2 pour u = 0 dans la relation ci-dessus.
Inégalité de Bessel : si (ε1, . . . , εn) est une famille orthonormale, alors
∀x ∈ En∑
j=1
|(εj |x)|2 ≤ ‖x‖2
(et donc, si (εj) est une suite orthonormale, la série∑
|(εj |x)|2 est convergente).
Exemples :
1) Soient a un vecteur non nul de E, D = Vect (a) et H = D⊥ ; on a, pour x ∈ E
pD (x) =(a|x)‖a‖2
· a ; d (x,H) =|(a|x)|‖a‖ ; d (x,D) =
(
‖x‖2 − |(a|x)|2
‖a‖2
)1/2
2) Déterminer inf(a,b,c)∈R3
∫ +∞
0
[x3 −
(ax2 + bx+ c
) ]2e−xdx
(idée : se placer dans R [X] muni du produit scalaire (P,Q) �→ (P |Q) =∫ +∞
0P (x)Q (x) e−xdx ;
on cherche d(X3,R2 [X]
)2. . . )

9. Espaces préhilbertiens et euclidiens Page 4
IIII - Espaces euclidiens et hermitiens
1) Bases orthonormales — Supplémentaire orthogonal
Définition : on appelle
∗ espace vectoriel euclidien tout espace préhilbertien réel de dimension finie ;
∗ espace vectoriel hermitien tout espace préhilbertien complexe de dimension finie.
Propriétés : soit E un espace vectoriel euclidien ou hermitien :
∗ E possède des bases orthonormales ;
∗ pour tout sous-espace vectoriel F de E,
F ⊕ F⊥ = E ; dimF⊥ = dimE − dimF ; F⊥⊥ = F ;
∗ toute famille orthonormale peut être complétée en une base orthonormale de E.
Dém. Les deux premières assertions découlent immédiatement du paragraphe précédent ; pour latroisième, choisir une base orthonormale de l’orthogonal du sous-espace engendré par la famille ini-tiale.
2) Écritures matricielles et expressions analytiques dans une b.o.n.
a) Cas réel
Soient E un espace vectoriel euclidien et B = (e1, . . . , en) une base de E.
• Si x =n∑
i=1
xi.ei et y =n∑
j=1
yj .ej , alors, par bilinéarité :
(x|y) =n∑
i=1
n∑
j=1
ai,jxiyj où ai,j = (ei|ej) .
Ainsi, en notant A la matrice A = (ai,j), et en identifiant R et M1,1 (R) :
(x|y) = tXAY et ‖x‖2 = tXAX où X =
x1...xn
, Y =
y1...yn
.
A est la matrice du produit scalaire dans la base B.
B est orthonormale si et seulement si A = In.
Si B est une base orthonormale :
• La famille (xk)1≤k≤n des coordonnées dans B de x ∈ E est donnée par : ∀k xk = (ek|x) = e∗k (x).
• Si x =n∑
k=1
xk.ek et y =n∑
k=1
yk.ek, alors (x|y) = tXY =n∑
k=1
xkyk et ‖x‖ =√tXX =
√√√√n∑
k=1
x2k.
• Si u ∈ L (E), la matrice de u dans B est A =((ei|u (ej))
)1≤i,j≤n
(en effet, ai,j est la i-ième coordonnée de u (ej) dans B).
b) Cas complexe
Soient E un espace vectoriel hermitien et B = (e1, . . . , en) une base de E.
• Si x =n∑
i=1
xi.ei et y =n∑
j=1
yj .ej , alors, par sesquilinéarité :
(x|y) =n∑
i=1
n∑
j=1
ai,j.xi.yj où ai,j = (ei|ej) .

9. Espaces préhilbertiens et euclidiens Page 5
Ainsi, en notant A la matrice A = (ai,j), et en identifiant C et M1,1 (C) :
(x|y) = tXAY et ‖x‖2 = tXAX où X =
x1...xn
, Y =
y1...yn
.
A est la matrice du produit scalaire dans la base B.
B est orthonormale si et seulement si A = In.
Si B est une base orthonormale :
• La famille (xk)1≤k≤n des coordonnées dans B de x ∈ E est donnée par : ∀k xk = (ek|x) = e∗k (x).
• Si x =n∑
k=1
xk.ek et y =n∑
k=1
yk.ek, alors (x|y) = tXY =n∑
k=1
xk.yk et ‖x‖ =√tXX =
√√√√n∑
k=1
|xk|2.
• Si u ∈ L (E), la matrice de u dans B est A =((ei|u (ej))
)1≤i,j≤n
(en effet, ai,j est la i-ième coordonnée de u (ej) dans B).
3) Isomorphisme canonique d’un espace vectoriel euclidien avec son dual
Théorème : soit E un espace vectoriel euclidien ; l’application
Φ : E → E∗
a �→ ϕa : x �→ (a|x)est un isomorphisme. En particulier,
∀f ∈ E∗ ∃!a ∈ E ∀x ∈ E f (x) = (a|x) .Dém. Φ est linéaire de E dans E∗, injective et dimE = dimE∗.
Conséquence : définition intrinsèque du produit vectoriel dans un espace vectoriel euclidien orienté.
NB : dans le cas complexe, on a toujours
∀f ∈ E∗ ∃!a ∈ E ∀x ∈ E f (x) = (a|x) .mais Φ n’est que semi-linéaire. . .
IIIIII - Endomorphismes autoadjoints et automorphismes orthogonauxDans tout ce paragraphe, E désigne un espace vectoriel euclidien.
1) Adjoint d’un endomorphisme
Théorème et définition : soit u ∈ L (E) ; il existe un unique endomorphisme u∗ de E, appelé l’adjoint
de u, tel que
∀ (x, y) ∈ E2(u∗ (x) |y
)=(x|u (y)
)
L’application u �→ u∗ est un automorphisme involutif de L (E). On a
∀ (u, v) ∈ L (E)2 (u ◦ v)∗ = v∗ ◦ u∗.Pour toute base orthonormale B de E, la matrice de u∗ dans B est latransposée de celle de u. On a
∀u ∈ L (E) rg u∗ = rgu , Tru∗ = Tru , detu∗ = detu.
Dém. Fixons une base orthonormale B = (e1, . . . , en) de E et u ∈ L (E) ; soit A = (ai,j) la matrice deu dans B ; si u∗ existe, sa matrice B = (bi,j) vérifie, B étant orthonormale :
∀ (i, j) bi,j = (ei|u∗ (ej)) = (u∗ (ej) |ei) = (ej |u (ei)) = aj,i ;
nécessairement, B = tA ; réciproquement, par bilinéarité, on vérifie que l’endomorphisme u∗ de matricetA dans B convient ; d’où l’existence et l’unicité de u∗. Le reste s’obtient aisément.

9. Espaces préhilbertiens et euclidiens Page 6
Théorème : soit ‖·‖ la norme sur L (E) subordonnée à la norme euclidienne. Pour tout u dans L (E),on a :
‖u∗‖ = ‖u‖ et ‖u∗ ◦ u‖ = ‖u‖2 .
2) Endomorphismes autoadjoints (ou symétriques)
Définition : u ∈ L (E) est dit autoadjoint (ou symétrique) si et seulement si
∀ (x, y) ∈ E2 (u (x) |y) = (x|u (y)) .
Caractérisation : soit u ∈ L (E) ; les assertions suivantes sont équivalentes :
a) u est autoadjoint ;
b) u∗ = u ;
c) la matrice de u dans une (toute) base orthonormale est symétrique.
Propriétés : 1) L’ensemble des endomorphismes autoadjoints de E est un sous-espace de L (E), iso-
morphe au sous-espace des matrices symétriques de Mn (R), de dimensionn(n+ 1)
2.
2) p ∈ L (E) est une projection orthogonale si et seulement si
p2 = p et p∗ = p.
Dém. 1) C’est le noyau de l’endomorphisme u �→ u∗ − u de L (E).2) ⇒ : soit F sous-espace de E et p = pF : p est un projecteur donc p2 = p et, dans une base
orthonormale adaptée à la décomposition E = F ⊕F⊥, p a pour matrice A =
(Ik 00 0
)où k = dimF .
A est symétrique, donc p est autoadjoint.⇐ : soit p ∈ L (E) tel que p = p2 = p∗; p est un projecteur, soient donc F = Im p et G = Ker p ; j’ai
∀ (x, y) ∈ F ×G (x|y) = (p (x) |y) = (x|p (y)) = 0
donc G ⊂ F⊥ d’où, compte tenu des dimensions, G = F⊥ ; p est donc la projection orthogonale sur F .
Exercice : on définit de même les endomorphismes antisymétriques, caractérisés par les assertionséquivalentes suivantes :
1) ∀ (x, y) ∈ E2 (f (x) |y) = − (x|f (y))
2) ∀x ∈ E (f (x) |x) = 0
3) f∗ = −f
4) la matrice de f dans une (toute) base orthonormale est antisymétrique.
Exemple : dans E espace vectoriel euclidien orienté de dimension 3, les endomorphismes antisymétriquessont les f�a : &u �→ &a ∧ &u ; si &a a pour coordonnées (α, β, γ) dans une base orthonormale B, alors
MB (f�a) =
0 −γ βγ 0 −α−β α 0
.
L’application &a �→ f�a est un isomorphisme de E dans le sous-espace de L (E) formé des endomorphismesantisymétriques.
3) Automorphismes orthogonaux
Définition : u ∈ L (E) est dit automorphisme orthogonal de E si et seulement si u conserve le produit
scalaire, c’est-à-dire
∀ (x, y) ∈ E2 (u (x) |u (y)) = (x|y)(si c’est le cas, u ∈ GL (E), puisque u (x) = 0⇒ x = 0).

9. Espaces préhilbertiens et euclidiens Page 7
Caractérisation : soit u ∈ L (E) ; les assertions suivantes sont équivalentes.
a) u est un automorphisme orthogonal de E ;
b) u conserve le produit scalaire : ∀ (x, y) ∈ E2 (u (x) |u (y)) = (x|y) ;
c) u conserve la norme : ∀x ∈ E ‖u (x)‖ = ‖x‖ ;
d) u∗ ◦ u = IE ;
e) u ◦ u∗ = IE ;
f) u ∈ GL (E) et u−1 = u∗ ;
g) u transforme une (toute) base orthonormale en base orthonormale.
Dém. Pour la seule implication non triviale c)⇒ b) , utiliser une identité de polarisation, par exemple
(u (x) |u (y)) = 1
2
(‖u (x) + u (y)‖2 − ‖u (x)‖2 − ‖u (y)‖2
),
puis la linéarité de u . . .
Propriétés : 1) L’ensemble des automorphismes orthogonaux de E est un sous-groupe de GL (E),appelé groupe orthogonal de E et noté O (E).2) s ∈ L (E) est une symétrie orthogonale si et seulement si s2 = IE et s∗ = s,ou encore si et seulement si s ∈ O (E) et s∗ = s.3) Si u ∈ O (E), alors detu = ±1 et Spu ⊂ {−1, 1}.
Définition : 1) Les automorphismes orthogonaux de E de déterminant +1 sont les rotations de E ;elles forment un sous-groupe de O (E), appelé groupe spécial orthogonal de E et notéSO (E).2) Les symétries orthogonales par rapport à un hyperplan sont les réflexions de E (ledéterminant d’une réflexion vaut −1).3) Lorsque dimE = 3, les symétries orthogonales par rapport à une droite sont les rota-tions d’angle π, encore appelées demi-tours ou retournements.
Propriété : dans E espace vectoriel euclidien orienté, les rotations sont les endomorphismes qui trans-forment une (toute) base orthonormale directe en base orthonormale directe.
4) Matrices orthogonales
Définition :M ∈ Mn (R) est une matrice orthogonale si et seulement si l’endomorphisme de Rn
canoniquement associé à M est un automorphisme orthogonal de Rn (muni du produitscalaire canonique).
Propriété : L’ensemble des matrices orthogonales est un sous-groupe de GLn (R), le groupe orthogonal
O (n), isomorphe à O (Rn). L’ensemble SO (n) des matrices de rotation de Rn est un sous-groupe de O (n), isomorphe à SO (Rn).
Caractérisation : on retrouve les caractérisations des automorphismes orthogonaux de Rn et, pourM ∈Mn (R), les assertions suivantes sont équivalentes :
a)M est une matrice orthogonale ;
b) tM ×M = In ;
c)M × tM = In ;
d)M inversible et M−1 = tM ;
e) tM est une matrice orthogonale ;
f) Les vecteurs colonnes de M forment une base orthonormale de Rn ;
g) Les vecteurs lignes de M forment une base orthonormale de Rn.
Propriétés : 1) Soient B une base orthonormale de E et B′ une base de E. B′ est une base orthonormalesi et seulement si la matrice de passage PB,B′ est une matrice orthogonale.2) Si M ∈ O (n), alors detM = ±1, SpCM ⊂ U et SpRM ⊂ {−1, 1}.

9. Espaces préhilbertiens et euclidiens Page 8
Exemples :
1) Soient &a un vecteur unitaire de E et C =
a1...an
le vecteur colonne de ses coordonnées dans une
base orthonormale B = (e1, . . . , en) ; la matrice de la projection orthogonale sur la droite Vect&a est
P = CtC = (aiaj)1≤i,j≤n ;
on en déduit immédiatement :
∗ la matrice de la projection orthogonale sur l’hyperplan (Vect&a)⊥ : In − P
∗ la matrice de la symétrie orthogonale par rapport à la droite Vect&a : 2P − In
∗ la matrice de la réflexion d’hyperplan (Vect&a)⊥ : In − 2P
2) Le groupe O (2) est constitué :
∗ des matrices de rotation
Rθ =
(cos θ − sin θsin θ cos θ
)(rotation d’angle θ)
∗ des matrices de réflexion
Sθ =
(cos θ sin θsin θ − cos θ
)(symétrie orthogonale par rapport à la droite d’angle polaire
θ
2).
3) Soit, dans E espace vectoriel euclidien orienté de dimension 3, la rotation r d’axe dirigé et orientépar le vecteur unitaire &a, d’angle θ (modulo 2π). On a, en notant p la projection orthogonale surl’axe Vect&a et q = IE − p la projection orthogonale sur le plan (Vect&a)⊥ :
∀&u ∈ E r (&u) = p (&u) + cos θ · q (&u) + sin θ · &a ∧ &u
d’où la matrice de r dans une base orthonormale directe B :
R = P + cos θ · (I3 − P ) + sin θ ·Aoù, (α, β, γ) désignant la famille des coordonnées de a dans B :
P =
α2 αβ αγβα β2 βγγα γβ γ2
et A =
0 −γ βγ 0 −α−β α 0
.
Réciproquement, étant donnée une matrice R de SO (3), sa partie antisymétrique1
2
(R− tR
)n’est
autre que sin θ · A ; cela fournit le vecteur unitaire &a et le signe de sin θ (2 choix possibles pourorienter l’axe !) ; la relation TrR = 1+ 2 cos θ permet d’achever la détermination de θ.
Applications :
• Écrire la matrice dans la base canonique de R3 de la rotation d’axe dirigé et orienté par (1, 1,−1)d’angle π/3.
• Caractériser géométriquement l’endomorphisme de R3 de matrice R dans la base canonique, où
R =1
9
8 1 −4−4 4 −71 8 4
5) Réduction des endomorphismes autoadjoints
Théorème spectral (fondamental !)
Soit u un endomorphisme autoadjoint de E ; E est somme directe orthogonale des sous-espaces propresde u ; autrement dit, u est diagonalisable dans une base orthonormale.
Corollaire : soit A une matrice symétrique réelle; A est diagonalisable avec une matrice de passageorthogonale :
∃P ∈ O (n) P−1AP diagonale (avec P−1 = tP !).

9. Espaces préhilbertiens et euclidiens Page 9
Lemme 1 : si A matrice symétrique réelle, le polynôme caractéristique de A est scindé sur R.
Dém. Le polynôme caractéristique χA de A, considérée comme matrice de Mn (C), est scindé sur C(théorème de d’Alembert-Gauss !) ; soient donc λ ∈ SpC (A) et Z ∈Mn,1 (C) un vecteur propre associé :
Z =
z1...zn
�= 0 et AZ = λ.Z ;
j’ai alors, en transposant et en conjuguant, comme A est symétrique réelle,tZ.A = λ.tZ d’où tZ.A.Z = λ.tZ.Z c’est-à-dire λ.tZ.Z = λ.tZ.Z
ortZ.Z =
n∑
k=1
|zk|2 > 0 donc λ = λ ;
par conséquent, χA est à coefficients réels et toutes ses racines en tant que polynôme de C [X] sontréelles : χA est scindé sur R.
NB : de même, les valeurs propres d’une matrice antisymétrique réelle sont imaginaires pures.
Lemme 2 : si u ∈ L (E) est autoadjoint et F un sous-espace de E stable par u, F⊥ est stable par u.
Dém. Supposons u∗ = u et F stable par u ; soit alors x ∈ F⊥ :
∀y ∈ F (u (x) |y) = (x|u (y)) = 0
puisque x ∈ F⊥ et u (y) ∈ F ; donc u (x) ∈ F⊥, ceci pour tout x de F⊥ : F⊥ est stable par u.
Dém. du théorème : par récurrence forte sur n = dimE ; soit, pour n ∈ N∗, Pn l’assertion : “pourtout endomorphisme autoadjoint u de tout espace vectoriel euclidien de dimension n, il existe une baseorthonormale de E formée de vecteurs propres de u”.
• P1 est triviale ;
• hypothèse de récurrence : soit n ≥ 2 tel que Pk soit vraie pour tout k < n ;
• Soient alors E un espace vectoriel euclidien de dimension n et u un endomorphisme autoadjoint deE, A la matrice de u dans une base orthonormale de E. D’après le lemme 1, A admet au moinsune valeur propre réelle λ, soit donc F = Eλ (u) le sous-espace propre associé ; F est stable paru et donc G = F⊥ est également stable par u d’après le lemme 2. Soit v l’endomorphisme de Ginduit par u ; muni du produit scalaire induit par celui de E, G est un espace vectoriel euclidien dedimension p < n et v est un endomorphisme autoadjoint de G :
∀ (x, y) ∈ G2 (v (x) |y)G = (u (x) |y)E = (x|u (y))E = (x|v (y))Gdonc l’hypothèse de récurrence me fournit une base orthonormale de G formée de vecteurs propres dev, qui sont aussi des vecteurs propres de u ! Il suffit alors de la compléter par une base orthonormalede F (également formée de vecteurs propres de u !) pour conclure.
Attention ! Dans Mn (C) (pour n ≥ 2 !), il existe des matrices symétriques non diagonalisables. . .
Voir par exemple(i 11 −i
).
IVIV - Formes bilinéaires symétriques — Formes quadratiquesDans tout ce paragraphe, E est un R-espace vectoriel.
1) Définitions — Notations
On note BS (E) le R-espace vectoriel des formes bilinéaires symétriques sur E.On appelle forme quadratique sur E toute application q de E dans R telle qu’il existe une forme bilinéairesymétrique f sur E telle que : ∀x ∈ E q (x) = f (x, x).On dit alors que q est la forme quadratique associée à f .Ce nom vient de la relation : ∀λ ∈ R ∀x ∈ E q (λ.x) = λ2q (x).

9. Espaces préhilbertiens et euclidiens Page 10
Si c’est le cas, on a, pour tout (x, y) de E2, les relations :{
q (x+ y) = q (x) + q (y) + 2f (x, y)
q (x− y) = q (x) + q (y)− 2f (x, y)
qui fournissent les identités de polarisation :
f (x, y) =1
2
[q (x+ y)− q (x)− q (y)
]=
1
2
[q (x) + q (y)− q (x− y)
]=
1
4
[q (x+ y)− q (x− y)
]
Il en résulte l’unicité de la forme bilinéaire symétrique f , alors appelée la forme polaire de q.On note Q (E) le R-espace vectoriel des formes quadratiques sur E.L’application f �→ q est un isomorphisme de BS (E) dans Q (E).
2) Formes positives et définies positivesSoit f une forme bilinéaire symétrique sur E et q la forme quadratique associée.
a) Définitions
• f (resp. q) est dite positive si et seulement si : ∀x ∈ E f (x, x) = q (x) ≥ 0.
• f (resp. q) est dite définie positive si et seulement si : ∀x ∈ E\ {0} f (x, x) = q (x) > 0.
Attention ! La condition “∀ (x, y) ∈ E2 f (x, y) ≥ 0” n’est vérifiée que pour f = 0 . . .
b) Inégalité de Cauchy-Schwarz
• Si f et q sont positives, on a : ∀ (x, y) ∈ E2 |f (x, y)| ≤√
q (x)√
q (y).
• Si en outre f et q sont définies positives, on a l’égalité dans l’inégalité ci-dessus si et seulement si xet y sont colinéaires.
3) Expression analytique en dimension finiePour la fin du chapitre, E est un espace vectoriel euclidien de dimension n.
Soit f une forme bilinéaire symétrique sur E et q la forme quadratique associée. Pour B = (e1, . . . , en)base de E, on appelle matrice de f (resp. q) dans B la matrice A = (f (ei, ej))1≤i,j≤n.Soient x, y dans E et
X =
x1...xn
, Y =
y1...yn
les vecteurs colonnes des coordonnées des vecteurs x et y dans B ; on a, en identifiant les matrices deM1,1 (R) aux scalaires,
f (x, y) = tX.A.Y =n∑
i=1
n∑
j=1
ai,j.xi.yj
et
q (x) = tX.A.X =n∑
i=1
n∑
j=1
ai,j.xi.xj =n∑
i=1
ai,i.x2i +
∑
1≤i<j≤n
2ai,j .xi.xj .
Règle de dédoublement des termes : partant de l’expression analytique de q (x), on retrouve celle de
f (x, y) en remplaçant les termes de la forme x2i par xi.yi et ceux de la forme xi.xj par1
2(xi.yj + xj .yi).
Changement de base : soit B′ une autre base de E et P la matrice de passage de B à B′ ; la matrice def (resp. q) dans B′ est A′ = tPAP (définition hors programme : on dit que A et A′ sont des matricescongruentes).
Théorème et définition : le rang de la matrice de f (resp. q) dans une base de E ne dépend pasdu choix de ladite base. On l’appelle le rang de f (resp. q).Une forme est dite non dégénérée si et seulement si elle est de rang n.

9. Espaces préhilbertiens et euclidiens Page 11
4) Endomorphisme autoadjoint associé
Propriété : soit f : E2 → R une forme bilinéaire symétrique ; il existe un unique endomorphismeautoadjoint u de E tel que
∀ (x, y) ∈ E2 f (x, y) = (x|u (y)) .Dém. Fixons une base orthonormale B = (e1, . . . , en) de E.
• Analyse : si u existe, sa matrice A = (ai,j) dans B est nécessairement donnée par
∀ (i, j) ai,j = (ei|u (ej)) = f (ei, ej) .
• Synthèse : soit u l’endomorphisme défini dans B par la matrice A ci-dessus ; f étant symétrique, Aest symétrique et donc u est autoadjoint (puisque B est orthonormale). Enfin les relations ci-dessuspermettent d’obtenir, par bilinéarité :
∀ (x, y) ∈ E2 f (x, y) = (x|u (y)) .Ainsi, u convient et l’unicité provient de l’analyse.
5) Réduction dans une base orthonormaleDans une base orthonormale B′ où la matrice de u est la matrice diagonale
∆ = diag (λ1, . . . , λn) ,
l’expression analytique de f devient
f (x, y) = tX ′.∆.Y ′ =n∑
k=1
λk.x′k.y
′k et q (x) = f (x, x) = tX ′.∆.X ′ =
n∑
k=1
λk.x′2k
où X ′ =
x′1...x′n
, Y ′ =
y′1...y′n
sont les vecteurs colonnes des coordonnées des vecteurs x, y dans B′.
En effet, si P désigne une matrice de passage orthogonale telle que
P−1AP = ∆
(obtenue en déterminant une base orthonormale formée de vecteurs propres de l’endomorphisme u, ouencore de la matrice A), P étant orthogonale, P−1 = tP et donc : tPAP = ∆ ; par conséquent :
f (x, y) = tX.A.Y = t(PX ′
).A.(PY ′
)= tX ′.
(tPAP
).Y ′ = tX ′.∆.Y ′.
Propriété : le rang d’une forme (bilinéaire symétrique ou quadratique) est le nombre de valeurs propresnon nulles (répétées selon leur multiplicité) de la matrice symétrique associée.
6) Application aux coniques et aux quadriques
a) Réduction de l’équation générale d’une conique
Dans un plan euclidien orienté, muni d’un repère orthonormal, soit C l’ensemble des points dont lescoordonnées vérifient
ax2 + by2 + cxy + αx+ βy + γ = 0.
La partie quadratique ax2 + by2 + cxy s’écrit f (&u, &u) où f est la forme bilinéaire symétrique obtenuepar “dédoublement des termes” :
f (&u1, &u2) = ax1x2 + by1y2 +c
2(x1y2 + y1x2) .
En se plaçant dans une base orthonormale de vecteurs propres de la matrice symétrique associée
A =
(a c/2
c/2 b
)
on obtient une équation sans terme en x′y′, de la forme
λx′2 + µy′2 + α′x′ + β′y′ + γ′ = 0
où λ et µ sont les valeurs propres de A. Un changement d’origine permet enfin d’absorber le terme enx′ (resp. y′) dans le terme en x′2 (resp. y′2) à condition que λ (resp. µ) soit non nul.

9. Espaces préhilbertiens et euclidiens Page 12
D’où la typologie :
• si A a une valeur propre nulle → “type parabole”
• si A a deux valeurs propres de même signe → “type ellipse”
• si A a deux valeurs propres signes contraires → “type hyperbole”
Exemple : préciser la nature et une équation réduite de la conique d’équation
9x2 + 24xy + 16y2 + 2x = 0.
b) Réduction de l’équation générale d’une quadrique
La même méthode s’applique en dimension 3 aux quadriques (surfaces définies par une équation cartési-enne polynomiale en x, y de degré 2).Dans un espace euclidien orienté de dimension 3, muni d’un repère orthonormal, soit S l’ensemble despoints dont les coordonnées vérifient
ax2 + by2 + cz2 +Cxy +Ayz +Bzx+ αx+ βy + γz + δ = 0.
La partie quadratique ax2 + by2 + cz2 + Cxy + Ayz + Bzx s’écrit f (&u, &u) où f est la forme bilinéairesymétrique obtenue par “dédoublement des termes” :
f (&u1, &u2) = ax1x2 + by1y2 + cy1y2 +C
2(x1y2 + y1x2) +
A
2(y1z2 + z1y2) +
B
2(z1x2 + x1z2) .
En se plaçant dans une base orthonormale de vecteurs propres de la matrice symétrique associée
M =
a C/2 B/2
C/2 b A/2B/2 A/2 c
on obtient une équation sans termes “croisés”, de la forme
λx′2 + µy′2 + νz′2 + α′x′ + β′y′ + γ′z′ + δ′ = 0
où λ, µ et ν sont les valeurs propres de M . Un changement d’origine permet enfin d’absorber le termeen x′ (resp. y′, z′) dans le terme en x′2 (resp. y′2, z′2) à condition que λ (resp. µ, ν) soit non nul.
En dehors des cas “dégénérés”, on obtient les quadriques usuelles de la page suivante (la classificationse fait en fonction des signes des valeurs propres).
Exemple : préciser la nature et une équation réduite de la surface d’équation
2x2 + 2y2 + z2 − 2yz + 2zx = 1.
c) Quadriques usuelles
Voici les équations réduites et l’allure des quadriques usuelles.
Tout d’abord les trois familles de cylindres :
elliptique :x2
a2+
y2
b2= 1 hyperbolique :
x2
a2− y2
b2= 1 parabolique : x2 − 2py = 0
Puis les équations réduites où figurent les trois coordonnées :
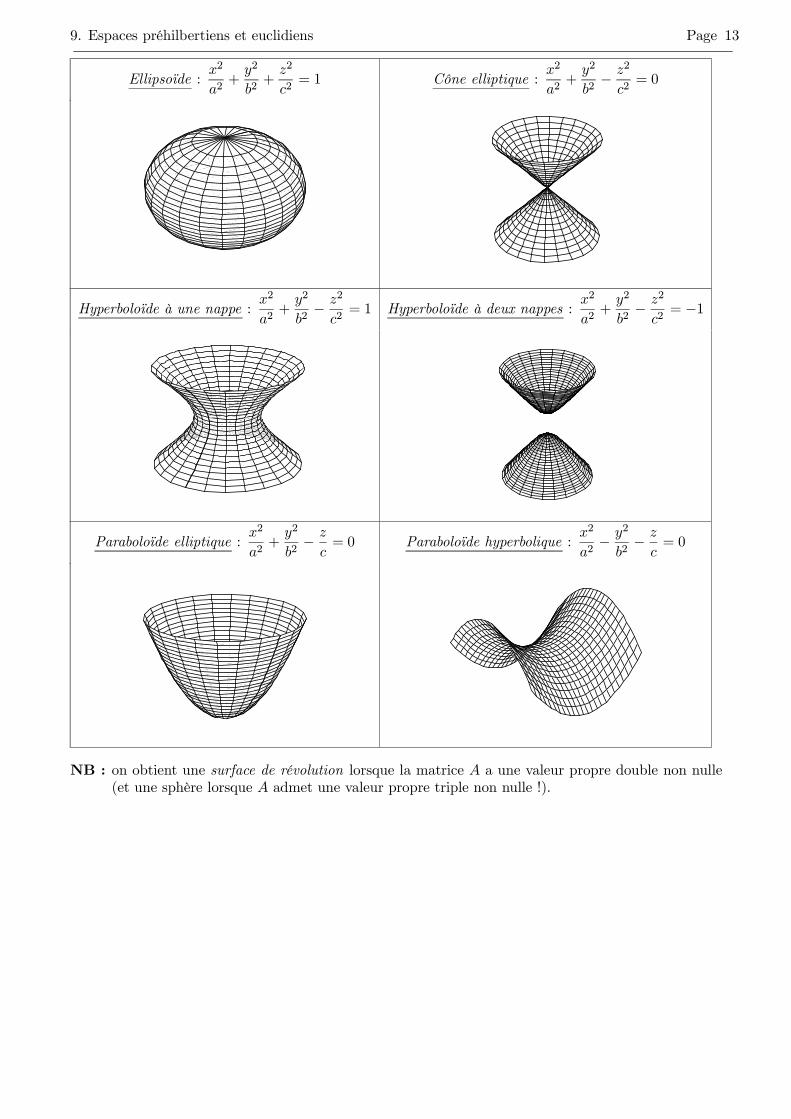
9. Espaces préhilbertiens et euclidiens Page 13
Ellipsoïde :x2
a2+
y2
b2+
z2
c2= 1 Cône elliptique :
x2
a2+
y2
b2− z2
c2= 0
Hyperboloïde à une nappe :x2
a2+
y2
b2− z2
c2= 1 Hyperboloïde à deux nappes :
x2
a2+
y2
b2− z2
c2= −1
Paraboloïde elliptique :x2
a2+
y2
b2− z
c= 0 Paraboloïde hyperbolique :
x2
a2− y2
b2− z
c= 0
NB : on obtient une surface de révolution lorsque la matrice A a une valeur propre double non nulle(et une sphère lorsque A admet une valeur propre triple non nulle !).

9. Espaces préhilbertiens et euclidiens Page 14
d) Quadriques réglées (i.e. réunion d’une famille de droites)
• Cylindres : les différents cylindres ci-dessus sont bien entendu engendrés par une famille de droites(droites parallèles à Oz s’appuyant respectivement sur une ellipse, une hyperbole et une paraboledu plan xOy).
• Cônes elliptiques : les cônes elliptiques sont bien sûr aussi engendrés par une famille de droites(passant par le sommet du cône et s’appuyant sur une ellipse).
• Paraboloïde hyperbolique : moins évident, le paraboloïde hyperbolique d’équationx2
a2− y2
b2− z
c= 0
est engendré par deux familles de droites.
x2
a2− y2
b2− z
c= 0 ⇔
(xa+
y
b
)(xa− y
b
)=
z
c⇔ ∃λ ∈ R
{xa +
yb = λ
λ(xa −
yb
)− z
c = 0
⇔ ∃µ ∈ R{
xa −
yb = µ
µ(xa +
yb
)− z
c = 0
• Hyperboloïde à une nappe : l’hyperboloïde à une nappe d’équationx2
a2+
y2
b2− z2
c2= 1 est aussi
engendré par deux familles de droites.
x2
a2+
y2
b2− z2
c2= 1 ⇔
(xa+
z
c
)(xa− z
c
)=(1 +
y
b
)(1− y
b
)
⇔ ∃λ ∈ R{ (
xa +
zc
)= λ
(1 + y
b
)
λ(xa − z
c
)=(1− y
b
) ou{
1 + yb = 0
xa − z
c = 0
⇔ ∃µ ∈ R{ (
xa +
zc
)= µ
(1− y
b
)
µ(xa − z
c
)=(1 + y
b
) ou{
1− yb = 0
xa +
zc = 0

9. Espaces préhilbertiens et euclidiens Page 15
7) Endomorphismes et matrices symétriques positifsE est toujours ici un espace vectoriel euclidien.
Définition : un endomorphisme autoadjoint u de E est dit positif (resp. défini positif ) si la formebilinéaire symétrique associée f : (x, y) �→ (x|u (y)) l’est, c’est-à-dire si et seulement si
∀x ∈ E f (x, x) = (x|u (x)) ≥ 0 (resp. ∀x ∈ E\ {0} f (x, x) = (x|u (x)) > 0).
NB : les endomorphismes autoadjoints définis positifs sont associés aux produits scalaires sur E.Ce sont les endomorphismes autoadjoints positifs et bijectifs.
Caractérisation : un endomorphisme autoadjoint u de E est positif (resp. défini positif) si et seule-ment si ses valeurs propres sont dans R+ (resp. R+∗).
Dém. Soit u un endomorphisme autoadjoint de E ; le théorème spectral me fournit une base orthonor-male de vecteurs propres de E et le système (λ1, . . . , λn) des valeurs propres associées :
∀k ∈ Nn u (ek) = λk.ek.
Pour tout vecteur x =n∑
k=1
xk.ek de E, j’ai
f (x, x) = (x|u (x)) =n∑
k=1
λk.x2k.
Il en résulte immédiatement que, si tous les λk sont dans R+ (resp. R+∗), alors u est positif (resp. définipositif).Pour la réciproque, il suffit de remarquer que : ∀k ∈ Nn λk = (ek|u (ek)).
Définition : une matrice symétrique réelle A est dite positive (resp. définie positive) si l’endomorphismede Rn canoniquement associé CanA l’est, c’est-à-dire si et seulement si
∀X ∈Mn,1 (R)tXAX ≥ 0 (resp. ∀X ∈Mn,1 (R) \ {0} tXAX > 0).
Caractérisation : une matrice symétrique réelle est positive (resp. définie positive) si et seulement sises valeurs propres sont dans R+ (resp. R+∗).
Exemple important : soit A ∈Mn (R),
1) la matrice B = tAA est symétrique positive ;
2) CanB a même noyau que CanA et
rg(tAA
)= rgA.
Dém. Pour le premier point, il est clair que B est symétrique et que
∀X ∈Mn,1 (R)tXBX = ‖AX‖2 ≥ 0.
Pour le second point, la relation ci-dessus montre que :
BX = 0⇒ AX = 0.
Or la réciproque est banale et il en résulte KerCanB = KerCanA ; l’égalité des rangs résulte alors duthéorème du rang.
Théorème : soit ‖·‖ la norme sur L (E) subordonnée à la norme euclidienne.
∗ Si u ∈ L (E) est autoadjoint, alors ‖u‖ = maxλ∈Sp(u)
|λ|.
∗ Pour tout v de L (E), ‖v‖ = maxµ∈Sp(v∗◦v)
õ.
Attention ! La première assertion n’est pas vraie pour tout u. . .Voir par exemple une matrice nilpotente non nulle.





























