Embed Size (px)
Citation preview
Construction Electronique
Dossier de présentation professeur
Baccalauréat STI
Epreuve de Construction
Al@Dyn
Al@Dyn
Baccalauréat STI
Electronique
Epreuve de Construction
2012
Session 2012
Page 1 sur 21
Epreuve de Construction
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 2 sur 21
SOMMAIRE
Sommaire ....................................................................................................................................................................................... 2
Mise en Situation ........................................................................................................................................................................... 3
Le Systeme ..................................................................................................................................................................................... 4
Diagramme de Séquence ............................................................................................................................................................... 7
Diagramme des Exigences .............................................................................................................................................................. 8
Le Support du Projet ...................................................................................................................................................................... 9
Etude Fonctionnelle ..................................................................................................................................................................... 10
Les Orientations du Projet ............................................................................................................................................................ 11
La Description des Fonctions ........................................................................................................................................................ 12
Le Calendrier ................................................................................................................................................................................ 16
Le Matériel Necessaire ................................................................................................................................................................. 17
Les Logiciels Necessaires .............................................................................................................................................................. 19
Commande ................................................................................................................................................................................... 20
Equipe Projet ................................................................................................................................................................................ 20
Bon de commande Alecop ........................................................................................................................................................... 21

Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 3 sur 21
MISE EN SITUATION
LES ALARMES
Pour être alerté en cas d’intrusion dans son logement, le particulier dispose de plus en plus de
systèmes d'alarme sans fil, faciles à installer et à utiliser. Ces systèmes sont dotés de capteurs,
de sirènes et d’un transmetteur téléphonique filaire ou GSM. En cas d'intrusion, ces systèmes
déclenchent une alarme, et appellent des numéros préprogrammés.
Cependant, le propriétaire ou la société de surveillance ne peuvent faire appel aux services de
secours car d ’après l’article 16-2 de la loi n°83-629 du 12 juillet 1983 réglementant les activités
privées de sécurité : « Est injustifié tout appel des services de la police nationale ou de la gendarmerie
nationale par les personnes physiques ou morales exerçant des activités de surveillance à distance […]
faute d'avoir été précédé d'une levée de doute […] ».
LES CAMERAS
La levée de doute consiste à vérifier le bien fondé du déclenchement d'une alarme, cela peut se
faire par visionnage à distance. Il faut donc placer une ou plusieurs caméras fixes ou motorisées, à
des endroits stratégiques. Le nombre de caméras est donc lié à la surface à couvrir. Pour éviter la
multiplication de ces caméras, une solution consiste à rendre la caméra mobile, en la plaçant sur
un robot.
AL@DYN
Le projet Al@Dyn consiste donc à associer une caméra de surveillance à une plateforme
robotique, l’ensemble pouvant être piloté et consulté à distance. Ce système vient donc
en complément d’un système d’alarme offrant à la personne alertée la possibilité de
procéder à la levée de doute.
LE MOWAY
Pour valider la faisabilité d’une maquette prototype, il a été envisagé d’employer un
petit robot répondant au nom de Moway développé par la Société Alecop. Il sera utilisé
comme support mobile de la caméra. Ce robot est propulsé par deux moteurs à courant
continu, dispose de plusieurs capteurs embarqués, d’un port de communication
pouvant accueillir une caméra RF, un serveur Wifi, une carte de commande RF ou tout
autre élément utile développé sur mesure.
Construction Electronique
Dossier de présentation professeur
UTIL
Le cambrioleur déclenche l’alarme en
s’introduisant dans une espace protégé. Le
résident reçoit alors un message lui
signalant l’incident. Il peut donc vérifier le
bien fondé de ce déclenchement en
visionnant les images de la caméra de
surveillance tout en actionnant sont
déplacement. Cette vérification pouvant
être faite à distance grâce à un ordinateur
ou un smartphone connecté sur internet. Il
lui appartient de prévenir les forces de
l’ordre pour une interpellation du
malfaiteur.
Lorsque la vérification est terminée, ou si la
liaison est mise en défaut, Al@Dyn rentre
seul à sa base, où l’attend un poste de mise
en charge.
Al@Dyn
LE SYSTEME
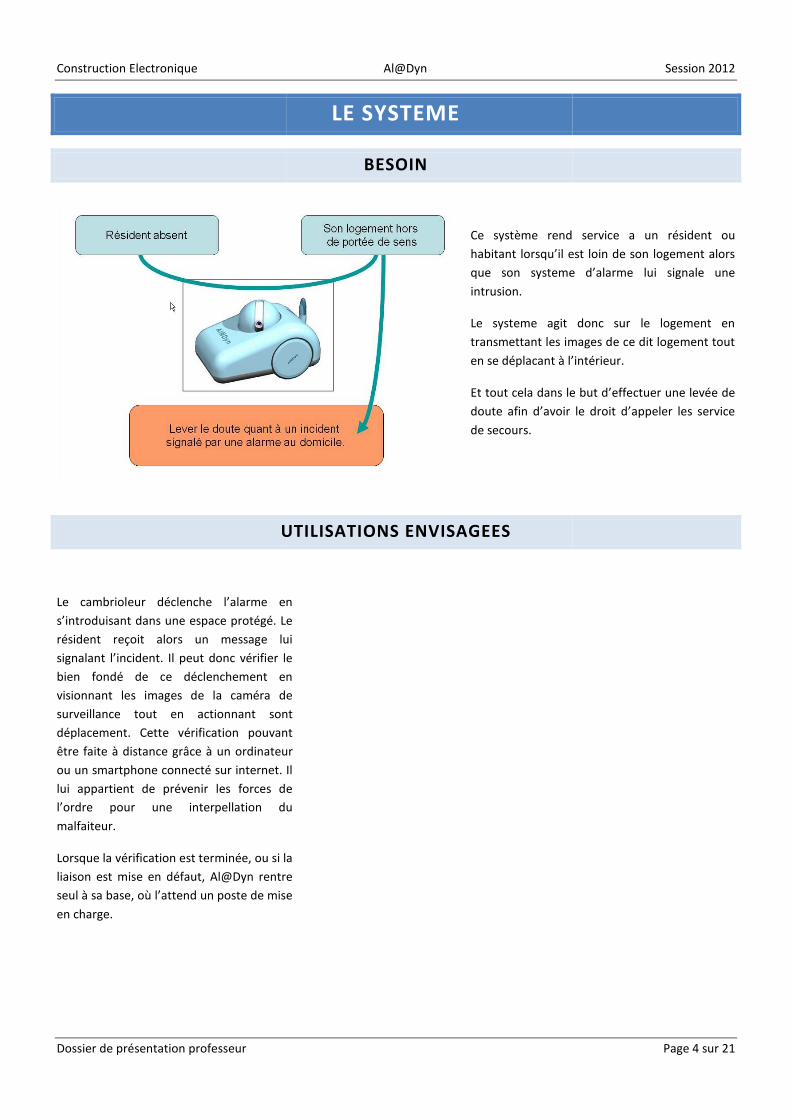
BESOIN
Ce système rend service a un résident ou
habitant lorsqu’il est loin de son logement alors
que son systeme d
intrusion.
Le systeme agit donc sur le logement en
transmettant les images
en se déplacant à l’
Et tout cela dans le but d
doute afin d’avoir le droit d
de secours.
UTILISATIONS ENVISAGEES
Le cambrioleur déclenche l’alarme en
s’introduisant dans une espace protégé. Le
résident reçoit alors un message lui
signalant l’incident. Il peut donc vérifier le
bien fondé de ce déclenchement en
e
surveillance tout en actionnant sont
déplacement. Cette vérification pouvant
être faite à distance grâce à un ordinateur
ou un smartphone connecté sur internet. Il
lui appartient de prévenir les forces de
l’ordre pour une interpellation du
la
mise en défaut, Al@Dyn rentre
, où l’attend un poste de mise
Session 2012
Page 4 sur 21
Ce système rend service a un résident ou
il est loin de son logement alors
que son systeme d’alarme lui signale une
Le systeme agit donc sur le logement en
nsmettant les images de ce dit logement tout
’intérieur.
Et tout cela dans le but d’effectuer une levée de
avoir le droit d’appeler les service
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 5 sur 21
DIAGRAMME SAGITTAL
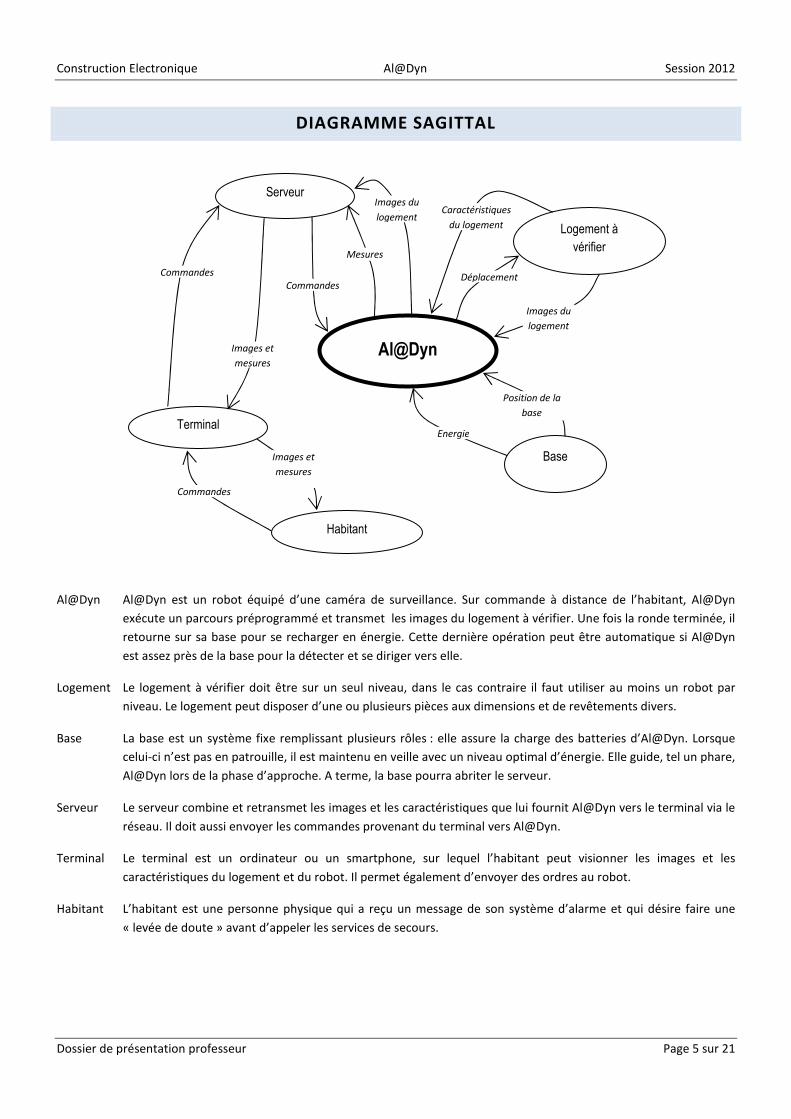
Al@Dyn Al@Dyn est un robot équipé d’une caméra de surveillance. Sur commande à distance de l’habitant, Al@Dyn
exécute un parcours préprogrammé et transmet les images du logement à vérifier. Une fois la ronde terminée, il
retourne sur sa base pour se recharger en énergie. Cette dernière opération peut être automatique si Al@Dyn
est assez près de la base pour la détecter et se diriger vers elle.
Logement Le logement à vérifier doit être sur un seul niveau, dans le cas contraire il faut utiliser au moins un robot par
niveau. Le logement peut disposer d’une ou plusieurs pièces aux dimensions et de revêtements divers.
Base La base est un système fixe remplissant plusieurs rôles : elle assure la charge des batteries d’Al@Dyn. Lorsque
celui-ci n’est pas en patrouille, il est maintenu en veille avec un niveau optimal d’énergie. Elle guide, tel un phare,
Al@Dyn lors de la phase d’approche. A terme, la base pourra abriter le serveur.
Serveur Le serveur combine et retransmet les images et les caractéristiques que lui fournit Al@Dyn vers le terminal via le
réseau. Il doit aussi envoyer les commandes provenant du terminal vers Al@Dyn.
Terminal Le terminal est un ordinateur ou un smartphone, sur lequel l’habitant peut visionner les images et les
caractéristiques du logement et du robot. Il permet également d’envoyer des ordres au robot.
Habitant L’habitant est une personne physique qui a reçu un message de son système d’alarme et qui désire faire une
« levée de doute » avant d’appeler les services de secours.
Terminal
Logement à
vérifier
Al@Dyn
Habitant
Serveur
Base
Déplacement Commandes
Caractéristiques
du logement
Position de la
base
Energie
Images et
mesures
Images du
logement
Mesures
Images du
logement
Images et
mesures
Commandes
Commandes
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 6 sur 21
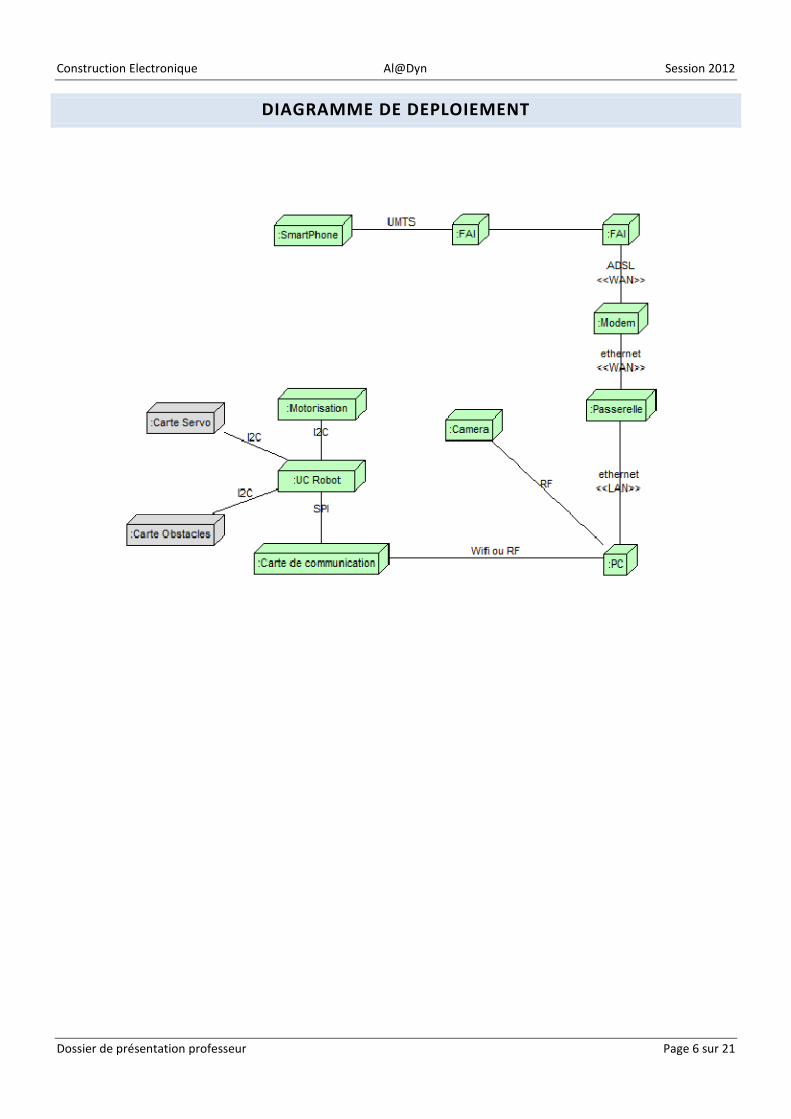
DIAGRAMME DE DEPLOIEMENT
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 7 sur 21
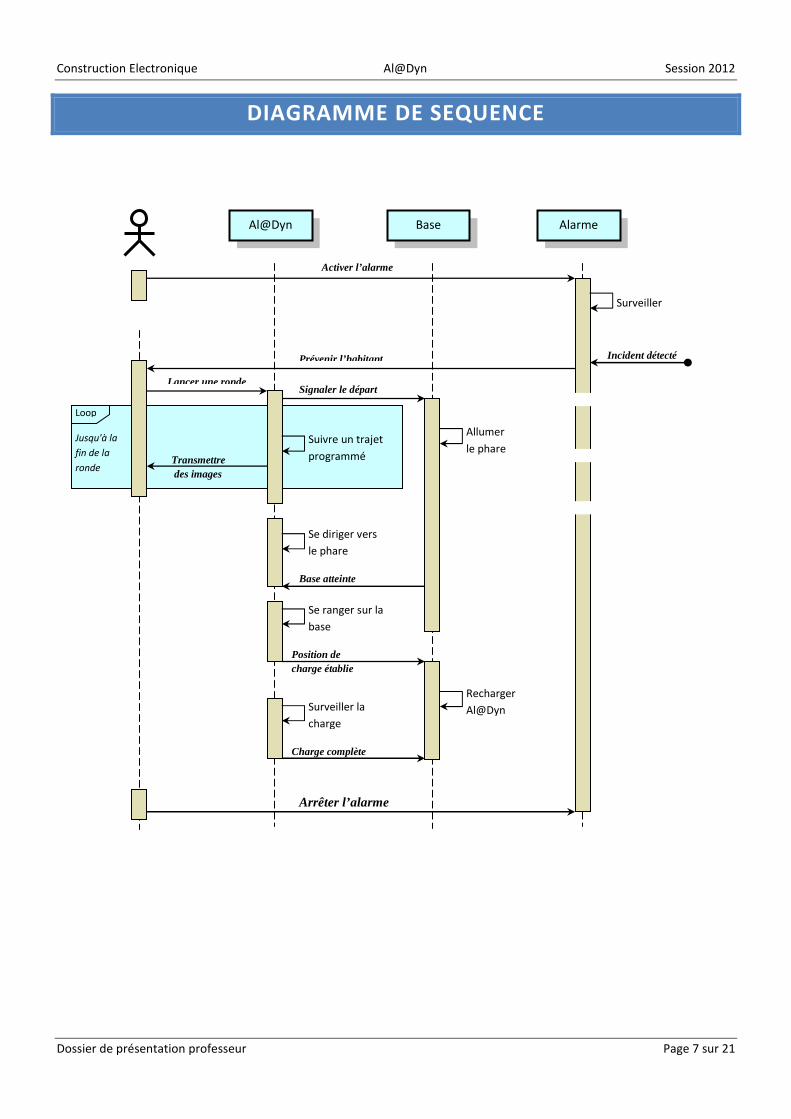
DIAGRAMME DE SEQUENCE
Al@Dyn Base Alarme
Loop
Incident détecté
Activer l’alarme
Prévenir l’habitant
Lancer une ronde Signaler le départ
Transmettre des images
Arrêter l’alarme
Charge complète
Surveiller
Allumer
le phare Suivre un trajet
programmé
Se diriger vers
le phare
Surveiller la
charge
Recharger
Al@Dyn
Base atteinte
Jusqu'à la
fin de la
ronde
Position de charge établie
Se ranger sur la
base
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 8 sur 21
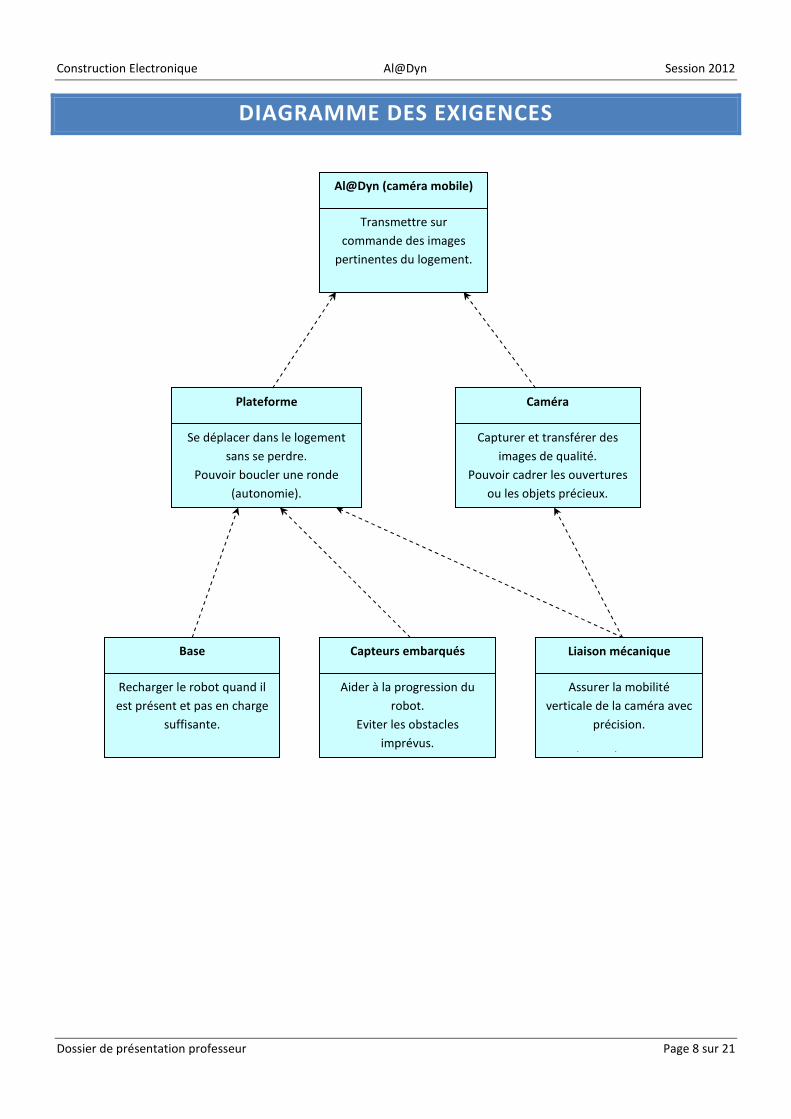
DIAGRAMME DES EXIGENCES
Al@Dyn (caméra mobile)
Transmettre sur
commande des images
pertinentes du logement.
Plateforme
Se déplacer dans le logement
sans se perdre.
Pouvoir boucler une ronde
(autonomie).
Caméra
Capturer et transférer des
images de qualité.
Pouvoir cadrer les ouvertures
ou les objets précieux.
Liaison mécanique
Assurer la mobilité
verticale de la caméra avec
précision.
Tenir la caméra.
Base
Recharger le robot quand il
est présent et pas en charge
suffisante.
Aider au retour du robot.
Capteurs embarqués
Aider à la progression du
robot.
Eviter les obstacles
imprévus.
Construction Electronique
Dossier de présentation professeur
LE SUPPORT DU PROJET
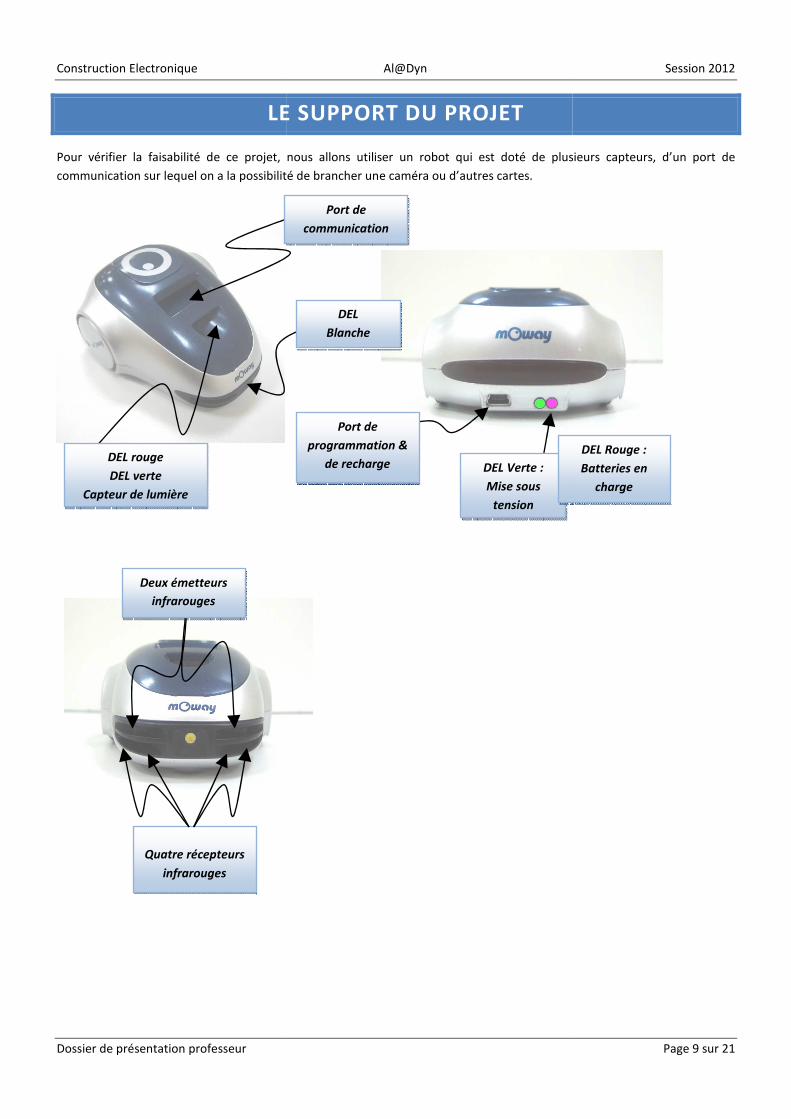
Pour vérifier la faisabilité de ce projet, nous
communication sur lequel on a la possibilité d
DEL rouge
DEL verte
Capteur de lumière
Deux émetteurs
infrarouges
Quatre récepteurs
infrarouges
Al@Dyn
LE SUPPORT DU PROJET
de ce projet, nous allons utiliser un robot qui est doté de plusieurs capteurs, d’un port de
on a la possibilité de brancher une caméra ou d’autres cartes.
Port de
communication
DEL
Blanche
Port de
programmation &
de recharge DEL Verte :
Mise sous
tension
Session 2012
Page 9 sur 21
de plusieurs capteurs, d’un port de
DEL Rouge :
Batteries en
charge
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 10 sur 21
ETUDE FONCTIONNELLE
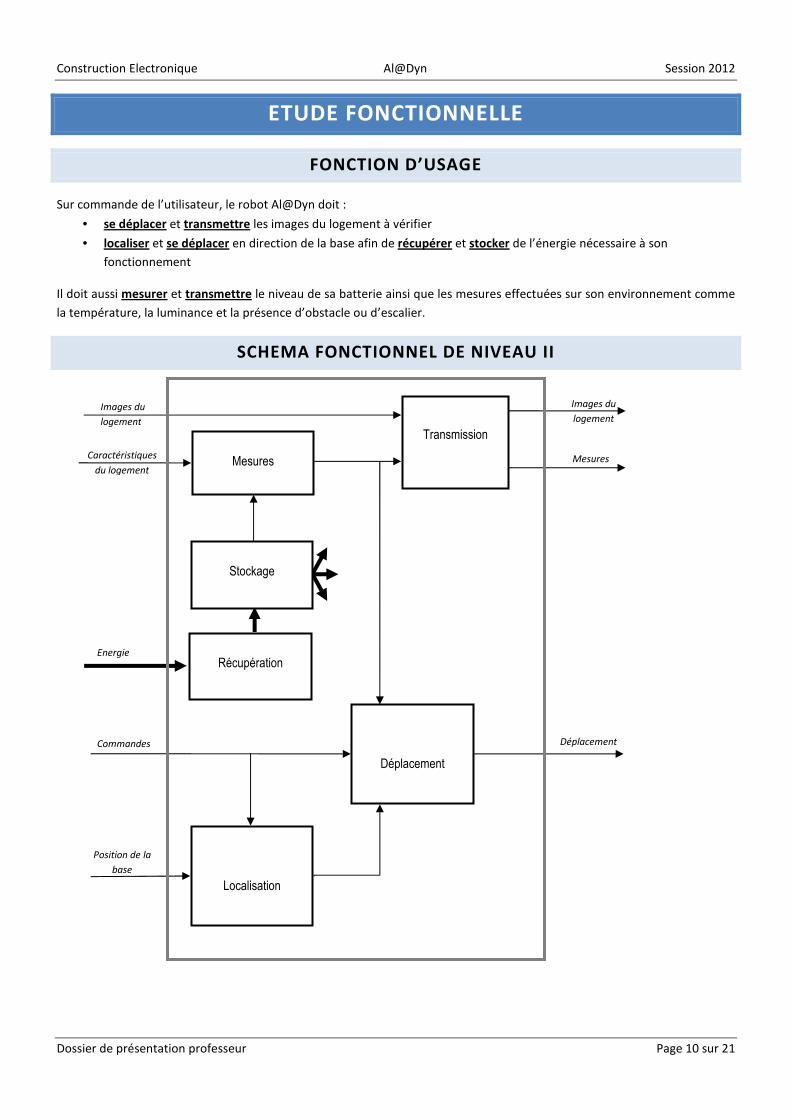
FONCTION D’USAGE
Sur commande de l’utilisateur, le robot Al@Dyn doit :
• se déplacer et transmettre les images du logement à vérifier
• localiser et se déplacer en direction de la base afin de récupérer et stocker de l’énergie nécessaire à son
fonctionnement
Il doit aussi mesurer et transmettre le niveau de sa batterie ainsi que les mesures effectuées sur son environnement comme
la température, la luminance et la présence d’obstacle ou d’escalier.
SCHEMA FONCTIONNEL DE NIVEAU II
Transmission
Images du
logement
Images du
logement
Energie
Localisation
Déplacement
Déplacement Commandes
Position de la
base
Mesures Caractéristiques
du logement
Récupération
Mesures
Stockage
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 11 sur 21
LES ORIENTATIONS DU PROJET
PRESENTATION
Dans le cadre de l’épreuve de STI, le projet se concentre sur la ronde d’Al@Dyn à travers un logement d’habitation.
La caméra, et la plateforme robotique sont données. Les élèves devront mettre en œuvre l’association de ces deux éléments,
leur connexion à un réseau de communication, et compléter le dispositif afin de lui conférer toute l’autonomie nécessaire à
l’exécution de cette ronde, depuis le départ piloté à distance, jusqu’au retour automatique vers la base et sa mise en charge.
PROBLEMATIQUE COMMUNE
« Servo » : Comment vérifier l’état des fenêtres avec le maximum de précision ?
Pour répondre à cette problématique, les élèves travaillent par équipe de trois ou quatre élèves. Ils doivent mettre en œuvre
un servo-moteur assurant l’élévation du champ de la caméra et configurer le dispositif pour la transmission des images
jusqu’au terminal, afin que l’habitant puisse procéder à la levée de doute.
PROBLEMATIQUES INDIVIDUELLES
« Boussole » : Comment garder le cap lors d’une ronde ?
Un élève par équipe doit concevoir, configurer et mettre en œuvre une boussole électronique.
« Obstacle » : Comment détecter un obstacle et en rendre compte ?
Un élève par équipe doit concevoir, configurer et mettre en œuvre un capteur d’obstacles.
« Base » : Comment se diriger et se placer sur la base ?
Un élève par équipe, doit concevoir, monter, câbler, configurer et mettre en œuvre un phare sur la base.
« Recharge » : Comment recharger le moway sans contact galvanique ?
Un élève par équipe, doit concevoir, monter, câbler et mettre en œuvre un système de recharge par induction.
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 12 sur 21
LA DESCRIPTION DES FONCTIONS
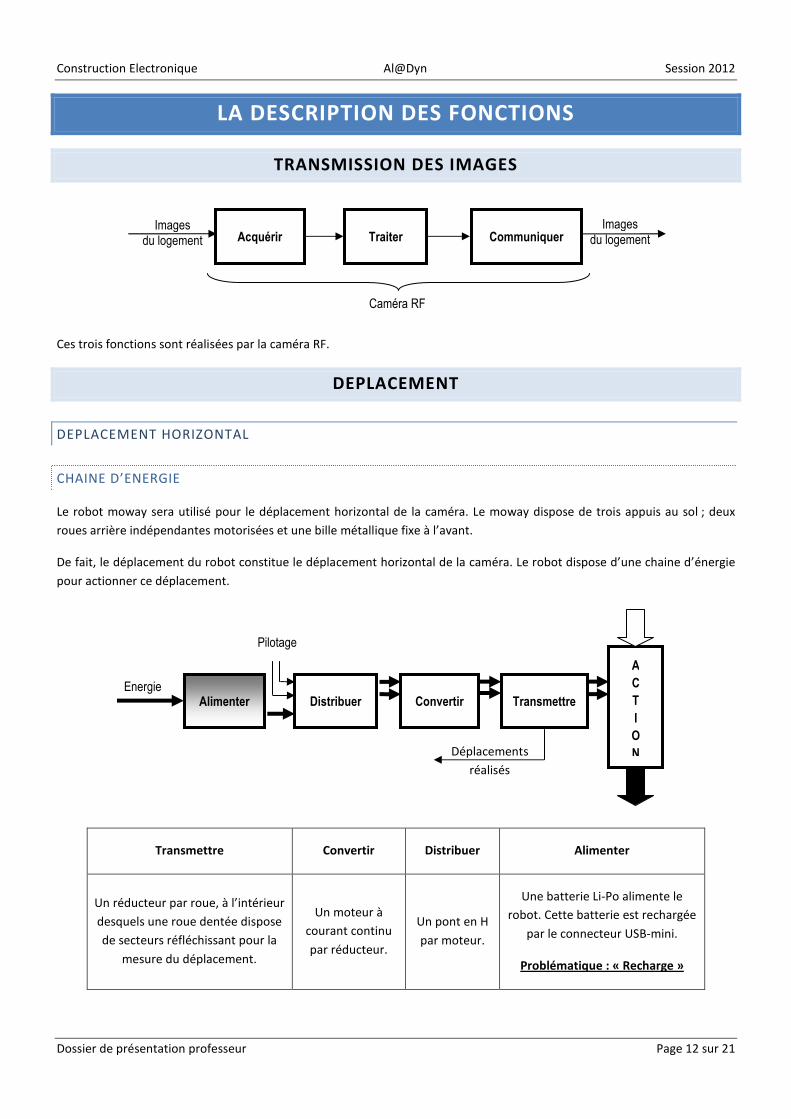
TRANSMISSION DES IMAGES
Ces trois fonctions sont réalisées par la caméra RF.
DEPLACEMENT
DEPLACEMENT HORIZONTAL
CHAINE D’ENERGIE
Le robot moway sera utilisé pour le déplacement horizontal de la caméra. Le moway dispose de trois appuis au sol ; deux
roues arrière indépendantes motorisées et une bille métallique fixe à l’avant.
De fait, le déplacement du robot constitue le déplacement horizontal de la caméra. Le robot dispose d’une chaine d’énergie
pour actionner ce déplacement.
Transmettre Convertir Distribuer Alimenter
Un réducteur par roue, à l’intérieur
desquels une roue dentée dispose
de secteurs réfléchissant pour la
mesure du déplacement.
Un moteur à
courant continu
par réducteur.
Un pont en H
par moteur.
Une batterie Li-Po alimente le
robot. Cette batterie est rechargée
par le connecteur USB-mini.
Problématique : « Recharge »
Communiquer Traiter Acquérir Images
du logement
Images du logement
Caméra RF
Convertir Distribuer Alimenter Energie
Transmettre
A
C
T
I
O
N
Pilotage
Déplacements
réalisés
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 13 sur 21
CHAINE D’INFORMATION
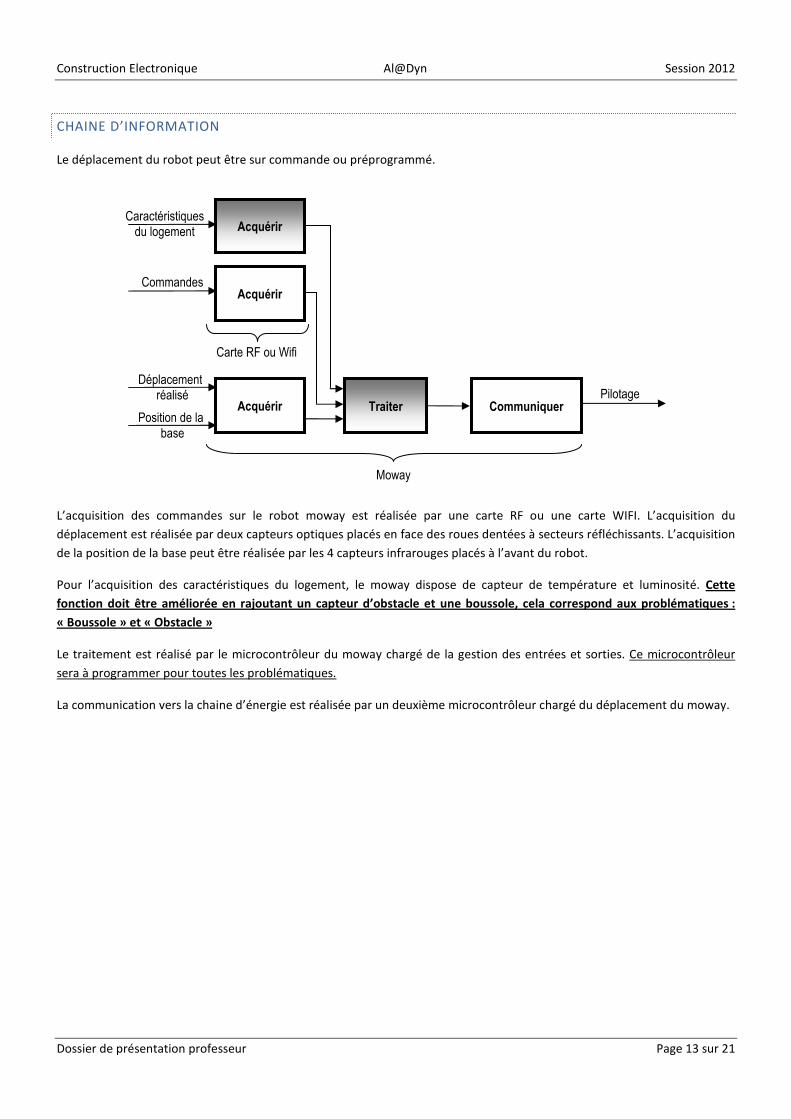
Le déplacement du robot peut être sur commande ou préprogrammé.
L’acquisition des commandes sur le robot moway est réalisée par une carte RF ou une carte WIFI. L’acquisition du
déplacement est réalisée par deux capteurs optiques placés en face des roues dentées à secteurs réfléchissants. L’acquisition
de la position de la base peut être réalisée par les 4 capteurs infrarouges placés à l’avant du robot.
Pour l’acquisition des caractéristiques du logement, le moway dispose de capteur de température et luminosité. Cette
fonction doit être améliorée en rajoutant un capteur d’obstacle et une boussole, cela correspond aux problématiques :
« Boussole » et « Obstacle »
Le traitement est réalisé par le microcontrôleur du moway chargé de la gestion des entrées et sorties. Ce microcontrôleur
sera à programmer pour toutes les problématiques.
La communication vers la chaine d’énergie est réalisée par un deuxième microcontrôleur chargé du déplacement du moway.
Communiquer Traiter
Acquérir Caractéristiques du logement
Pilotage
Moway
Acquérir
Déplacement réalisé
Acquérir Commandes
Carte RF ou Wifi
Position de la
base
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 14 sur 21
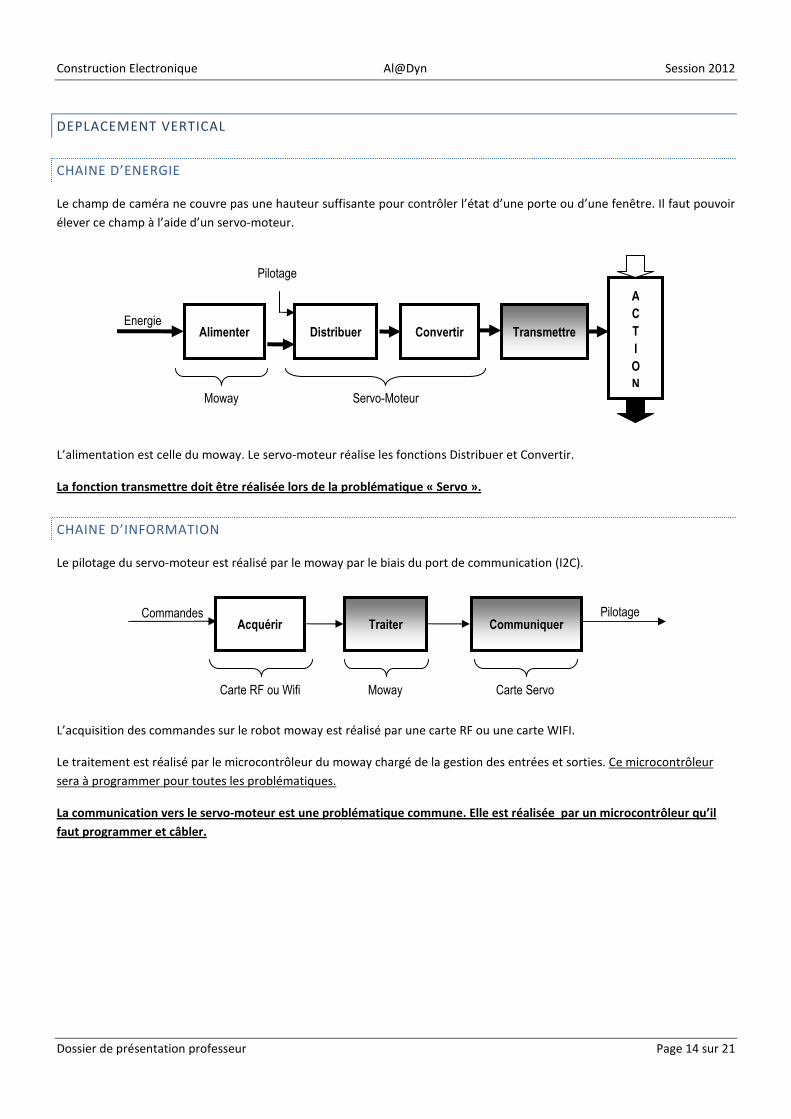
DEPLACEMENT VERTICAL
CHAINE D’ENERGIE
Le champ de caméra ne couvre pas une hauteur suffisante pour contrôler l’état d’une porte ou d’une fenêtre. Il faut pouvoir
élever ce champ à l’aide d’un servo-moteur.
L’alimentation est celle du moway. Le servo-moteur réalise les fonctions Distribuer et Convertir.
La fonction transmettre doit être réalisée lors de la problématique « Servo ».
CHAINE D’INFORMATION
Le pilotage du servo-moteur est réalisé par le moway par le biais du port de communication (I2C).
L’acquisition des commandes sur le robot moway est réalisé par une carte RF ou une carte WIFI.
Le traitement est réalisé par le microcontrôleur du moway chargé de la gestion des entrées et sorties. Ce microcontrôleur
sera à programmer pour toutes les problématiques.
La communication vers le servo-moteur est une problématique commune. Elle est réalisée par un microcontrôleur qu’il
faut programmer et câbler.
Communiquer Traiter Acquérir Commandes Pilotage
Moway Carte Servo Carte RF ou Wifi
Convertir Distribuer Alimenter Energie
Transmettre
A
C
T
I
O
N
Pilotage
Moway Servo-Moteur
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 15 sur 21
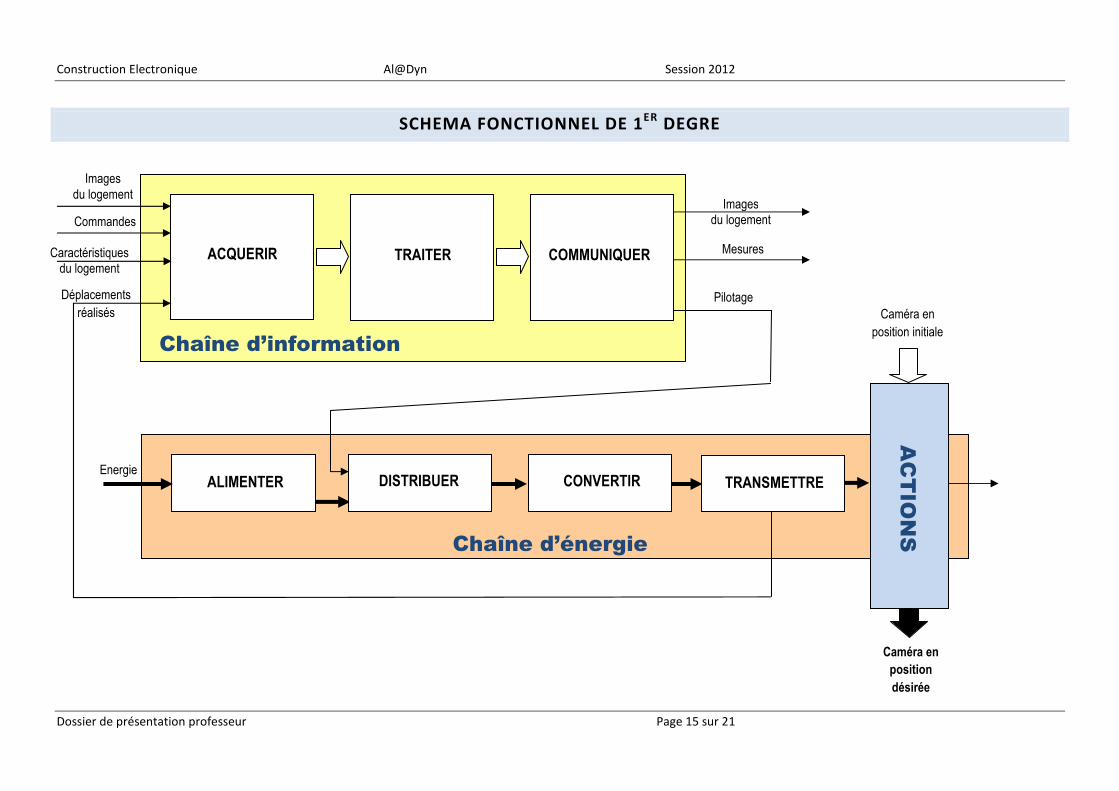
SCHEMA FONCTIONNEL DE 1ER
DEGRE
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
Commandes
Caméra en
position initiale
Caméra en
position
désirée
Energie
TRAITER ACQUERIR COMMUNIQUER
ACTIONS
Images
du logement
Pilotage
Chaîne d’énergie
Mesures
Chaîne d’information
Images
du logement
Déplacements
réalisés
Caractéristiques
du logement
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 16 sur 21
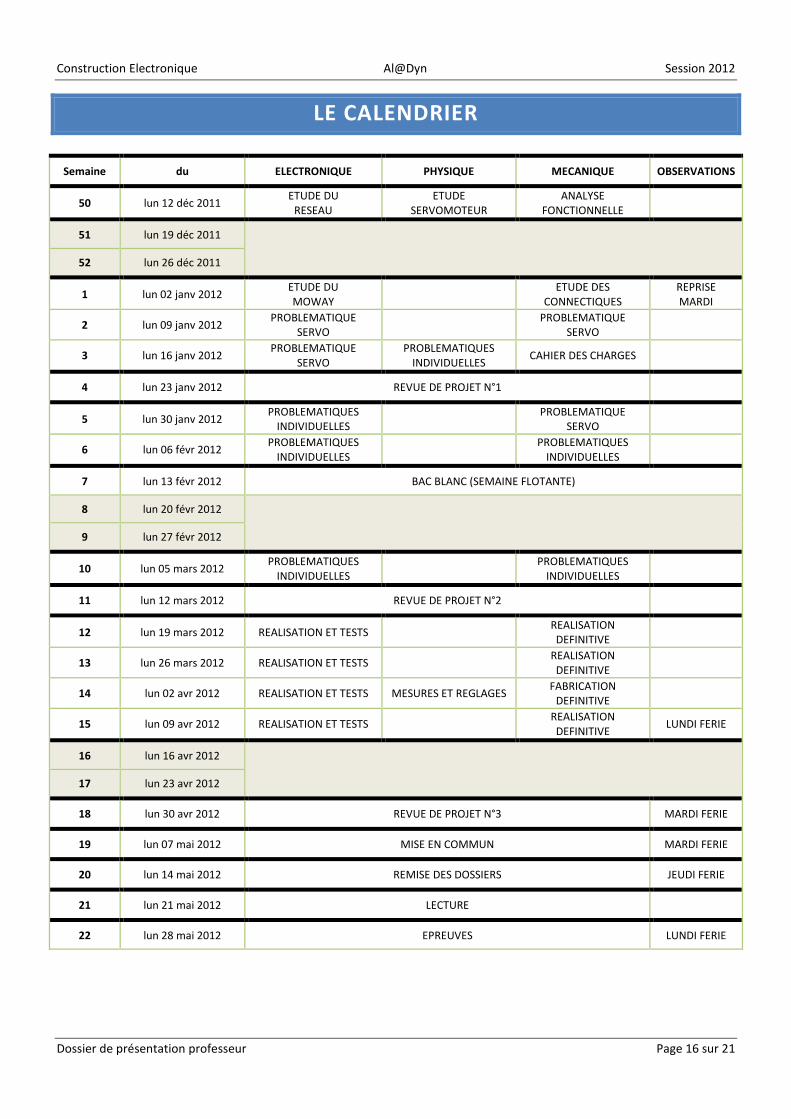
LE CALENDRIER
Semaine du ELECTRONIQUE PHYSIQUE MECANIQUE OBSERVATIONS
50 lun 12 déc 2011 ETUDE DU
RESEAU
ETUDE
SERVOMOTEUR
ANALYSE
FONCTIONNELLE
51 lun 19 déc 2011
52 lun 26 déc 2011
1 lun 02 janv 2012 ETUDE DU
MOWAY
ETUDE DES
CONNECTIQUES
REPRISE
MARDI
2 lun 09 janv 2012 PROBLEMATIQUE
SERVO
PROBLEMATIQUE
SERVO
3 lun 16 janv 2012 PROBLEMATIQUE
SERVO
PROBLEMATIQUES
INDIVIDUELLES CAHIER DES CHARGES
4 lun 23 janv 2012 REVUE DE PROJET N°1
5 lun 30 janv 2012 PROBLEMATIQUES
INDIVIDUELLES
PROBLEMATIQUE
SERVO
6 lun 06 févr 2012 PROBLEMATIQUES
INDIVIDUELLES
PROBLEMATIQUES
INDIVIDUELLES
7 lun 13 févr 2012 BAC BLANC (SEMAINE FLOTANTE)
8 lun 20 févr 2012
9 lun 27 févr 2012
10 lun 05 mars 2012 PROBLEMATIQUES
INDIVIDUELLES
PROBLEMATIQUES
INDIVIDUELLES
11 lun 12 mars 2012 REVUE DE PROJET N°2
12 lun 19 mars 2012 REALISATION ET TESTS
REALISATION
DEFINITIVE
13 lun 26 mars 2012 REALISATION ET TESTS
REALISATION
DEFINITIVE
14 lun 02 avr 2012 REALISATION ET TESTS MESURES ET REGLAGES FABRICATION
DEFINITIVE
15 lun 09 avr 2012 REALISATION ET TESTS
REALISATION
DEFINITIVE LUNDI FERIE
16 lun 16 avr 2012
17 lun 23 avr 2012
18 lun 30 avr 2012 REVUE DE PROJET N°3 MARDI FERIE
19 lun 07 mai 2012 MISE EN COMMUN MARDI FERIE
20 lun 14 mai 2012 REMISE DES DOSSIERS JEUDI FERIE
21 lun 21 mai 2012 LECTURE
22 lun 28 mai 2012 EPREUVES LUNDI FERIE
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 17 sur 21
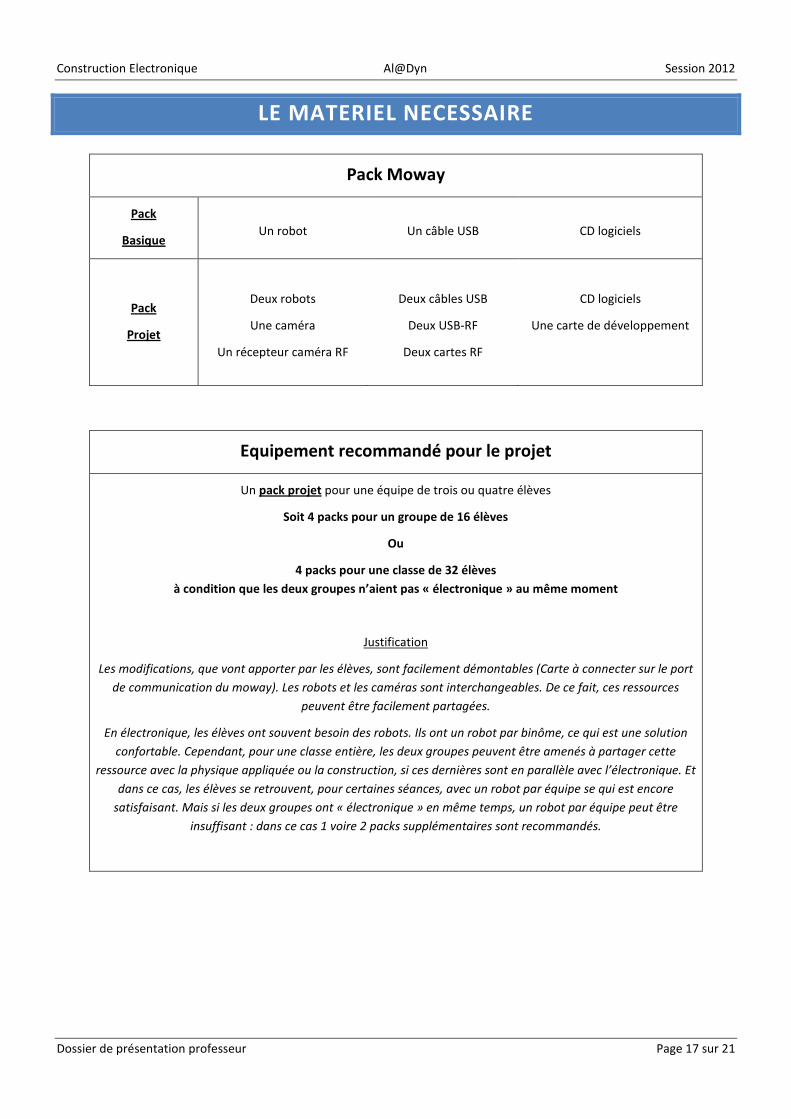
LE MATERIEL NECESSAIRE
Pack Moway
Pack
Basique Un robot Un câble USB CD logiciels
Pack
Projet
Deux robots
Une caméra
Un récepteur caméra RF
Deux câbles USB
Deux USB-RF
Deux cartes RF
CD logiciels
Une carte de développement
Equipement recommandé pour le projet
Un pack projet pour une équipe de trois ou quatre élèves
Soit 4 packs pour un groupe de 16 élèves
Ou
4 packs pour une classe de 32 élèves
à condition que les deux groupes n’aient pas « électronique » au même moment
Justification
Les modifications, que vont apporter par les élèves, sont facilement démontables (Carte à connecter sur le port
de communication du moway). Les robots et les caméras sont interchangeables. De ce fait, ces ressources
peuvent être facilement partagées.
En électronique, les élèves ont souvent besoin des robots. Ils ont un robot par binôme, ce qui est une solution
confortable. Cependant, pour une classe entière, les deux groupes peuvent être amenés à partager cette
ressource avec la physique appliquée ou la construction, si ces dernières sont en parallèle avec l’électronique. Et
dans ce cas, les élèves se retrouvent, pour certaines séances, avec un robot par équipe se qui est encore
satisfaisant. Mais si les deux groupes ont « électronique » en même temps, un robot par équipe peut être
insuffisant : dans ce cas 1 voire 2 packs supplémentaires sont recommandés.
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 18 sur 21
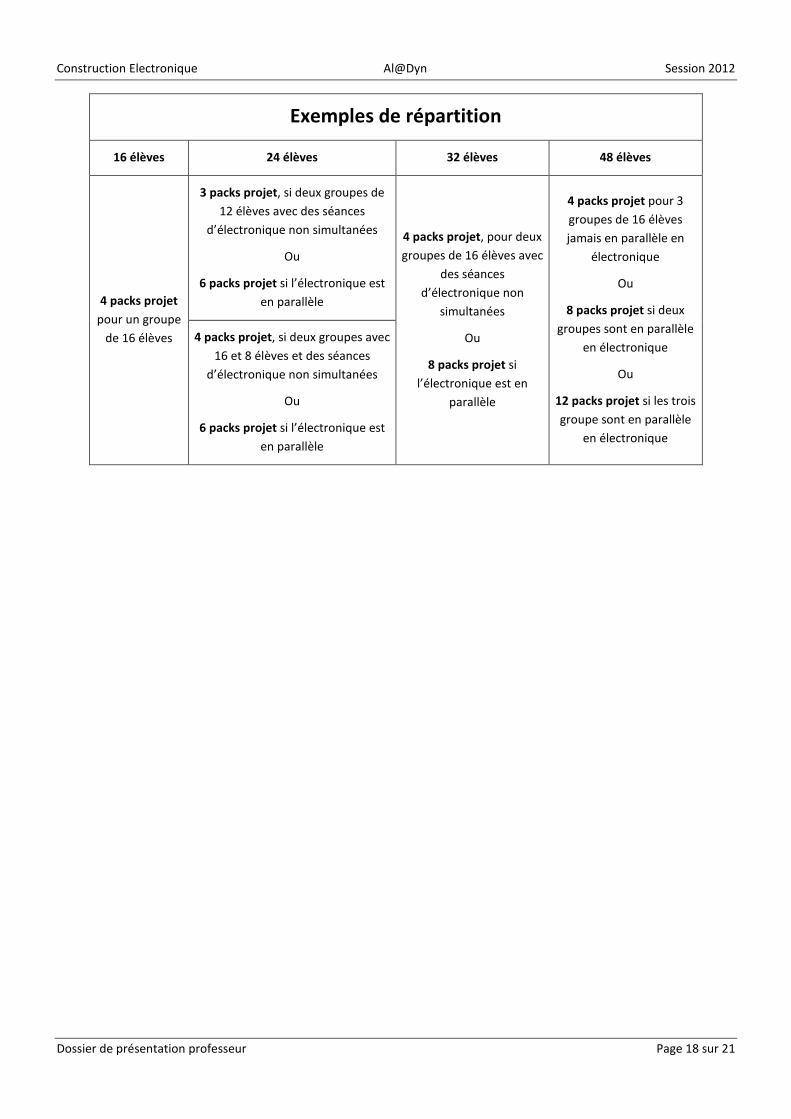
Exemples de répartition
16 élèves 24 élèves 32 élèves 48 élèves
4 packs projet
pour un groupe
de 16 élèves
3 packs projet, si deux groupes de
12 élèves avec des séances
d’électronique non simultanées
Ou
6 packs projet si l’électronique est
en parallèle
4 packs projet, pour deux
groupes de 16 élèves avec
des séances
d’électronique non
simultanées
Ou
8 packs projet si
l’électronique est en
parallèle
4 packs projet pour 3
groupes de 16 élèves
jamais en parallèle en
électronique
Ou
8 packs projet si deux
groupes sont en parallèle
en électronique
Ou
12 packs projet si les trois
groupe sont en parallèle
en électronique
4 packs projet, si deux groupes avec
16 et 8 élèves et des séances
d’électronique non simultanées
Ou
6 packs projet si l’électronique est
en parallèle
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 19 sur 21
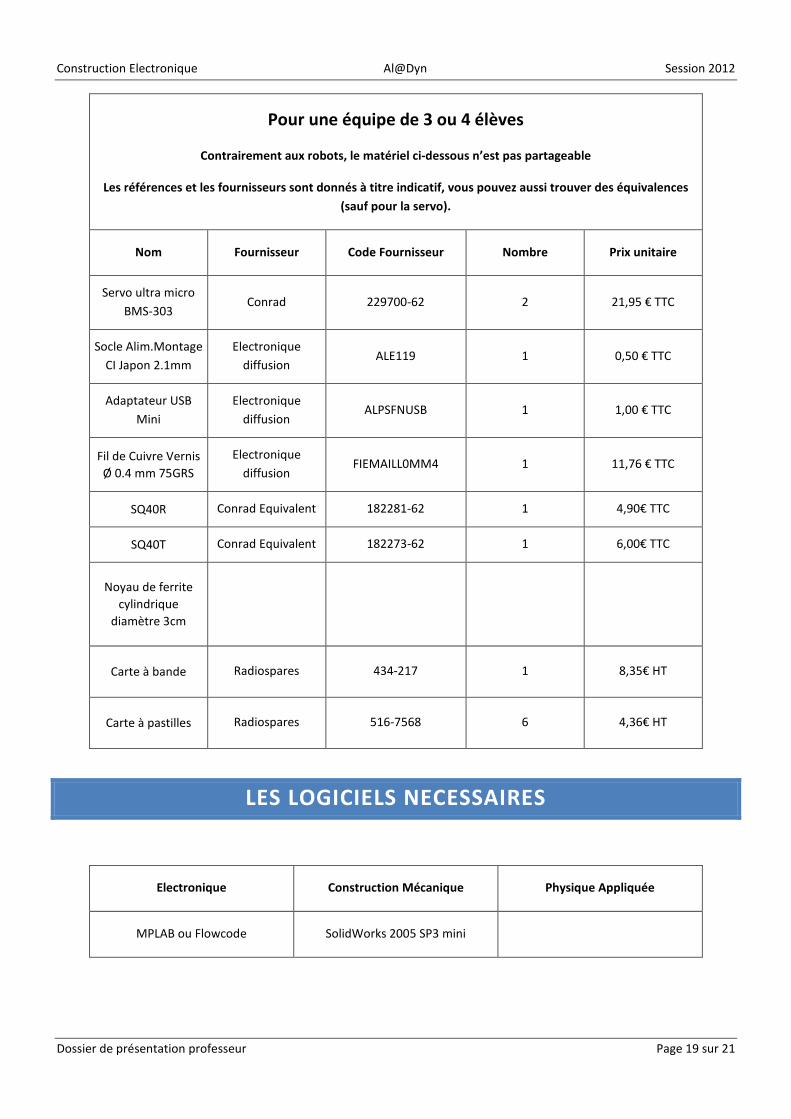
Pour une équipe de 3 ou 4 élèves
Contrairement aux robots, le matériel ci-dessous n’est pas partageable
Les références et les fournisseurs sont donnés à titre indicatif, vous pouvez aussi trouver des équivalences
(sauf pour la servo).
Nom Fournisseur Code Fournisseur Nombre Prix unitaire
Servo ultra micro
BMS-303 Conrad 229700-62 2 21,95 € TTC
Socle Alim.Montage
CI Japon 2.1mm
Electronique
diffusion ALE119 1 0,50 € TTC
Adaptateur USB
Mini
Electronique
diffusion ALPSFNUSB 1 1,00 € TTC
Fil de Cuivre Vernis
Ø 0.4 mm 75GRS
Electronique
diffusion FIEMAILL0MM4 1 11,76 € TTC
SQ40R Conrad Equivalent 182281-62 1 4,90€ TTC
SQ40T Conrad Equivalent 182273-62 1 6,00€ TTC
Noyau de ferrite
cylindrique
diamètre 3cm
Carte à bande Radiospares 434-217 1 8,35€ HT
Carte à pastilles Radiospares 516-7568 6 4,36€ HT
LES LOGICIELS NECESSAIRES
Electronique Construction Mécanique Physique Appliquée
MPLAB ou Flowcode SolidWorks 2005 SP3 mini
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 20 sur 21
COMMANDE
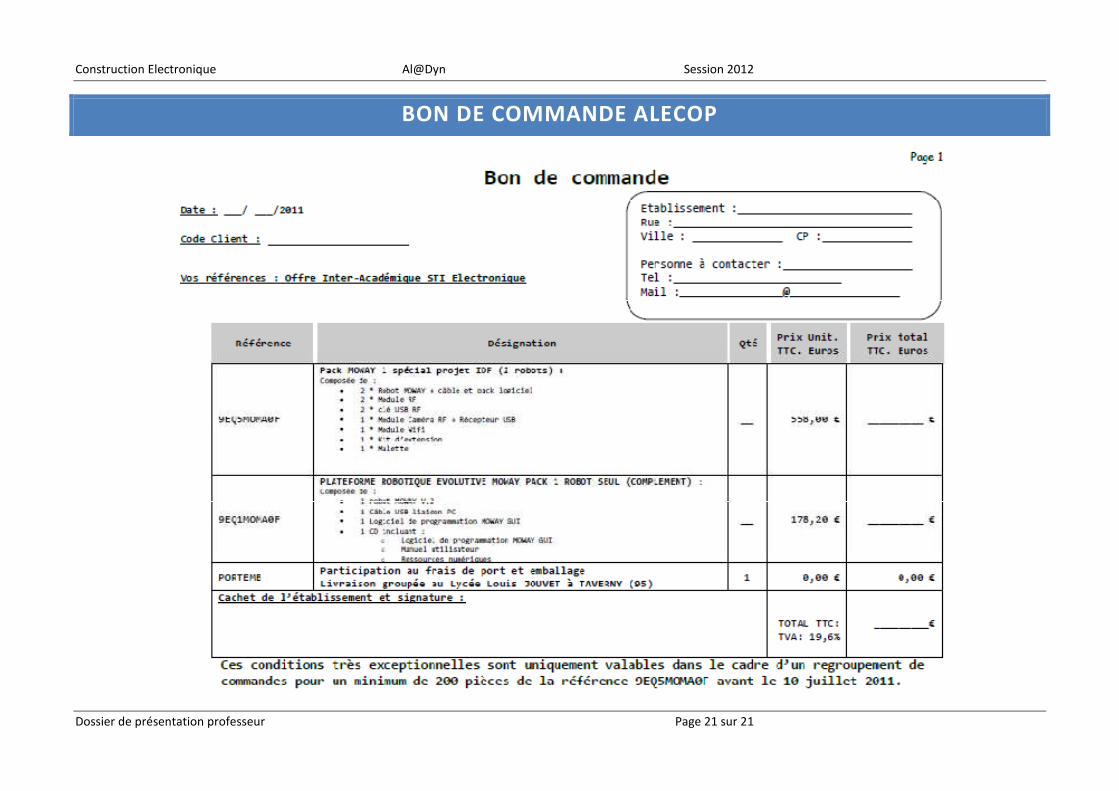
Le lycée Louis Jouvet de Taverny regroupe tous les bons de commande des robots (voir bon de commande joint), à faire
parvenir avant le jeudi 30 juin avec l’entête de l’établissement à :
Lycée Louis Jouvet
M. Pascal Marie, Chef de travaux
26, rue de St Prix
95150 Taverny
Email administratif: [email protected]
Tel : 01.34.18.41.26
Fax : 01.39.60.19.62
EQUIPE PROJET
• M. Bouchat Marc Physique Appliquée Lycée Louis Jouvet Taverny
• M. Chaine Mohamed Electronique Lycée Louis Jouvet Taverny
• M. Marie Pascal Chef de travaux Lycée Louis Jouvet Taverny
• M. Maunier Julien Physique Appliquée Lycée Jean Jaurès Argenteuil
• M. Merlet Eric Electronique Lycée Louis Jouvet Taverny
• M. Ruiz Olivier Construction Mécanique Lycée Louis Jouvet Taverny
Email pédagogique: [email protected]
Construction Electronique Al@Dyn Session 2012
Dossier de présentation professeur Page 21 sur 21
BON DE COMMANDE ALECOP


![ACTUATORLINE – ELM Serie · 2014. 2. 20. · Mx [Nm] 42 27 8 3 My [Nm] 230 150 46 18 Mz [Nm] 230 150 46 18 ELM 50 CI Théorique Conseillée* stat. dyn. stat. dyn. Fx [N] 890 670](https://img.pdfslide.fr/doc/110x75/6092ef4b6430404ca461a221/actuatorline-a-elm-serie-2014-2-20-mx-nm-42-27-8-3-my-nm-230-150-46-18.jpg)