Embed Size (px)
Citation preview

Asservissement
Frederic BONNARDOT
Janvier 2005


Table des matieres
1 Introduction 51.1 Commande sans controle (boucle ouverte) . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Commande avec controle humain (boucle fermee) . . . . . . . . . . . . . . . . . . . . . . . 51.3 Definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4 Fonctionnement d’un asservissement - regulation . . . . . . . . . . . . . . . . . . . . . . . 6
1.4.1 Regulation (electronique) de temperature en tout ou rien . . . . . . . . . . . . . . 61.4.2 Regulation de vitesse de rotation d’une antenne radar . . . . . . . . . . . . . . . . 7
1.5 Objectifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Modelisation des systemes physiques 112.1 Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Mise en equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Systeme lineaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.2 Etude des phenomenes physiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2.3 Notion d’absorption d’energie capacite,inductance . . . . . . . . . . . . . . . . . . 122.2.4 Boıte a outil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.5 Exemple de systeme hydraulique . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.2.6 Limite des equations differentielles, Transforme de Laplace . . . . . . . . . . . . . 15
2.3 Fonction de transfert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.4 Schema fonctionnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4.1 Constitution du schema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4.2 Simplification de schema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4.3 Regles de modification des schema fonctionnels . . . . . . . . . . . . . . . . . . . . 18
2.5 Systemes non lineaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Etude des systemes lineaires 213.1 Reponse d’un systeme lineaire a des fonctions test . . . . . . . . . . . . . . . . . . . . . . 21
3.1.1 Notion de fonction generique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1.2 Temps de reponse a 5 % . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1.3 Etude des systeme du premier et second ordre . . . . . . . . . . . . . . . . . . . . 233.1.4 Valeurs remarquables pour l’amortissement . . . . . . . . . . . . . . . . . . . . . . 233.1.5 Liens entre l’amortissement et les autres quantites . . . . . . . . . . . . . . . . . . 23
3.2 Identification temporelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2.1 Ordre 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2.2 Ordre 1 + retard . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2.3 Ordre 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Reponse frequentielle : Analyse harmonique . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3.1 De l’analyse harmonique au diagramme de Bode . . . . . . . . . . . . . . . . . . . 263.3.2 Diagramme de Bode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4 Identification dans le domaine frequentiel . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.5 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3

4 Principe de l’asservissement et de la regulation 334.1 Schema fonctionnel associe a un asservissement - regulation . . . . . . . . . . . . . . . . . 334.2 Objectifs d’un asservissement - regulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2.1 Rapidite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.2 Precision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.3 Robustesse vis a vis des perturbations . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.4 Stabilite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5 Correcteurs P,I,D 375.1 Dimensionnement des correcteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.1.1 Systemes du 1er ordre : H (p) = K1+τp . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.1.2 Systemes du 2nd ordre contenant un integrateur : H (p) = Kp(1+τp) . . . . . . . . . 37
5.1.3 Systemes du 2nd ordre : H (p) = K(1+τ1p)(1+τ2p) . . . . . . . . . . . . . . . . . . . . 39
5.1.4 Bilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 395.2 Comportement face aux perturbations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2.1 Forme generique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.2.2 Influence des perturbations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6 Technique de correction des perturbations 45
7 Etude de cas 47
4
Chapitre 1
Introduction
1.1 Commande sans controle (boucle ouverte)
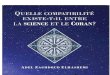
On va chauffer une salle de cours a l’aide d’un ballon d’eau chaude. Pour cela, on regle la vanne dedebit d’eau chaude afin d’agir sur la temperature de la piece.
Figure 1.1: Salle de cours
Malheureusement, le processus sera soumis a diverses perturbations : soleil, ouverture d’une fenetre,temperature de l’eau, temperature exterieure, ... Des lors, la temperature reelle ne correspondra plus a latemperature souhaitee le lendemain.
Figure 1.2: De la temperature souhaitee a la temperature reelle
1.2 Commande avec controle humain (boucle fermee)
Si la temperature n’est pas correcte, la personne presente dans la salle modifiera le reglage de latemperature. Elle realise donc une regulation de temperature : elle agit sur la position de la vanne afinque la temperature de la salle corresponde a la temperature souhaitee.
5
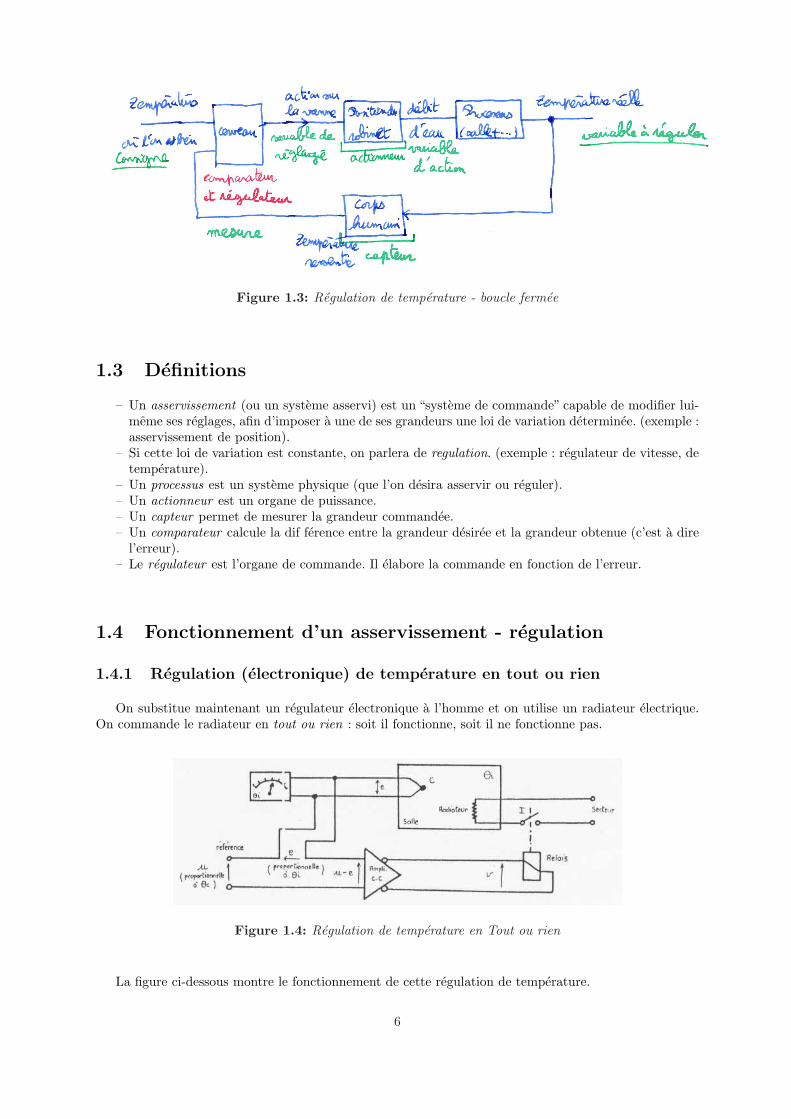
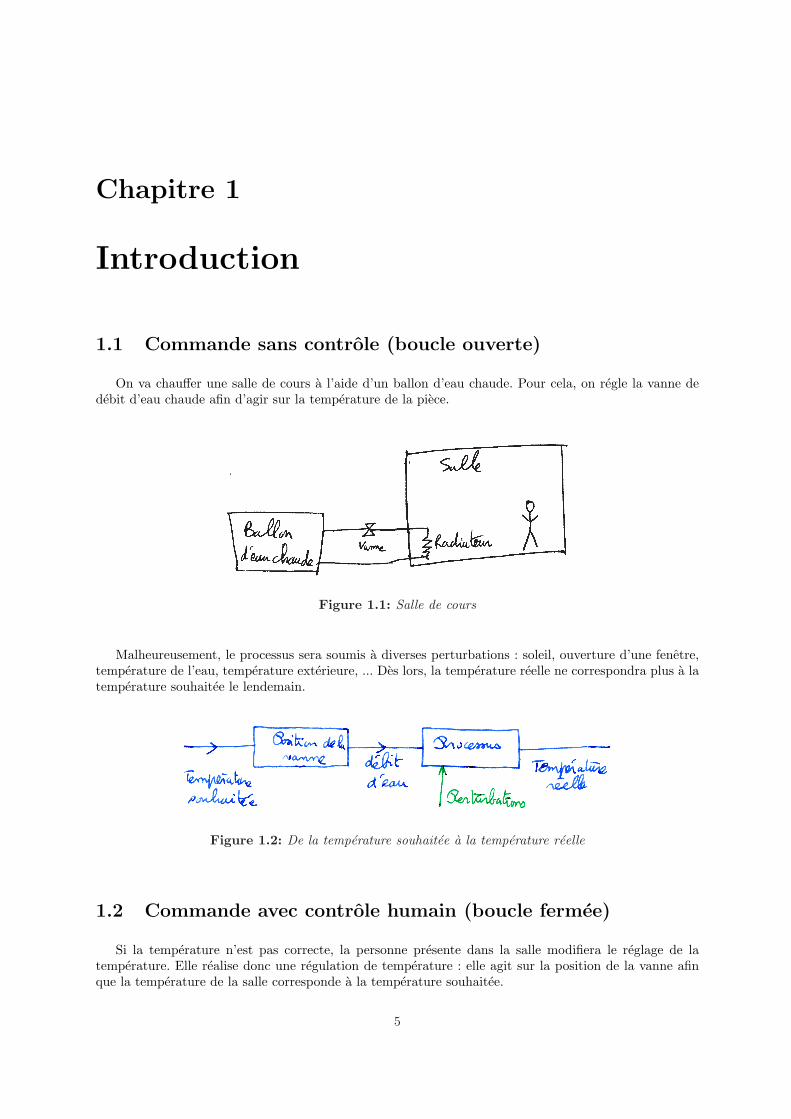
Figure 1.3: Regulation de temperature - boucle fermee
1.3 Definitions
– Un asservissement (ou un systeme asservi) est un “systeme de commande” capable de modifier lui-meme ses reglages, afin d’imposer a une de ses grandeurs une loi de variation determinee. (exemple :asservissement de position).
– Si cette loi de variation est constante, on parlera de regulation. (exemple : regulateur de vitesse, detemperature).
– Un processus est un systeme physique (que l’on desira asservir ou reguler).– Un actionneur est un organe de puissance.– Un capteur permet de mesurer la grandeur commandee.– Un comparateur calcule la dif ference entre la grandeur desiree et la grandeur obtenue (c’est a dire
l’erreur).– Le regulateur est l’organe de commande. Il elabore la commande en fonction de l’erreur.
1.4 Fonctionnement d’un asservissement - regulation
1.4.1 Regulation (electronique) de temperature en tout ou rien
On substitue maintenant un regulateur electronique a l’homme et on utilise un radiateur electrique.On commande le radiateur en tout ou rien : soit il fonctionne, soit il ne fonctionne pas.
Figure 1.4: Regulation de temperature en Tout ou rien
La figure ci-dessous montre le fonctionnement de cette regulation de temperature.
6
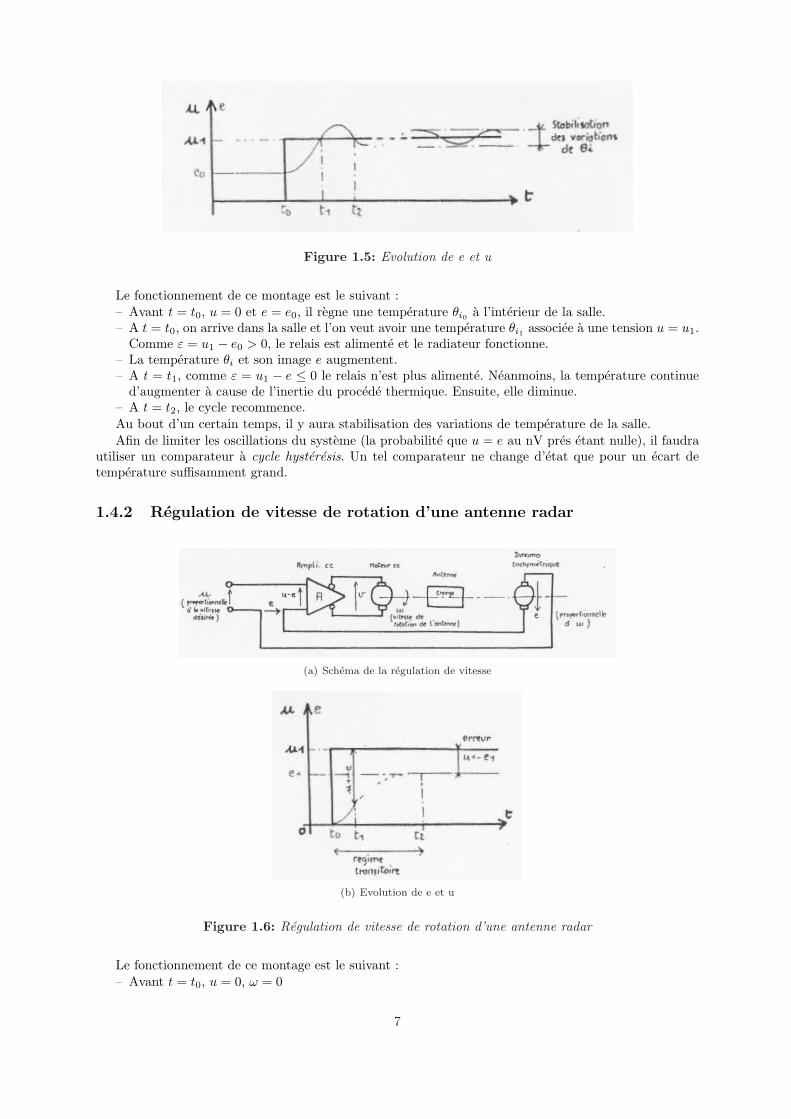
Figure 1.5: Evolution de e et u
Le fonctionnement de ce montage est le suivant :– Avant t = t0, u = 0 et e = e0, il regne une temperature θi0 a l’interieur de la salle.– A t = t0, on arrive dans la salle et l’on veut avoir une temperature θi1 associee a une tension u = u1.
Comme ε = u1 − e0 > 0, le relais est alimente et le radiateur fonctionne.– La temperature θi et son image e augmentent.– A t = t1, comme ε = u1 − e ≤ 0 le relais n’est plus alimente. Neanmoins, la temperature continue
d’augmenter a cause de l’inertie du procede thermique. Ensuite, elle diminue.– A t = t2, le cycle recommence.Au bout d’un certain temps, il y aura stabilisation des variations de temperature de la salle.Afin de limiter les oscillations du systeme (la probabilite que u = e au nV pres etant nulle), il faudra
utiliser un comparateur a cycle hysteresis. Un tel comparateur ne change d’etat que pour un ecart detemperature suffisamment grand.
1.4.2 Regulation de vitesse de rotation d’une antenne radar
(a) Schema de la regulation de vitesse
(b) Evolution de e et u
Figure 1.6: Regulation de vitesse de rotation d’une antenne radar
Le fonctionnement de ce montage est le suivant :– Avant t = t0, u = 0, ω = 0
7
– A t = t0, on desire une vitesse ω = ω1 soit u = u1. Comme ε = u1 − e = u1, le moteur demarre, savitesse ainsi que l’image de la vitesse e augmente.
– A t = t1, ε = u1 − e decroit. L’acceleration du moteur devient alors moins importante.– A t = t2, le radar tourne a la vitesse ω1 desiree. L’erreur n’est pas nulle. Si elle etait nulle, le moteur
ne pourrait pas tourner.
1.5 Objectifs
L’objectif de l’automatitien est d’ameliorer les performances des systemes asservis ou regules en reali-sant une commande adequat. Pour realiser cette asservissement de nombreuses connaissances prealablessont necessaires.
Dans le premier chapitre, nous montrerons comment modeliser les relations physiques mises en œuvredans le systeme etudie.
Etant donnee les nombreux paralleles entre les differents types de systemes physiques (electrique,mecanique, hydraulique, thermique, ...) nous etudierons le comportement de ses differents systemes al’aide d’equations typiques (1erordre, 2ndordre, ...) dans le chapitre 2.
Dans les chapitres 3 et 4 nous montrerons le principe de l’asservissement, de la regulations et lesdifferents objectifs attendus pour de tels systemes.
Le 5ieme chapitre sera consacre a des etudes de cas classiques (asservissement de postion, regulationde vitesse, ...).
8


Chapitre 2
Modelisation des systemes physiques
2.1 Limitations
Nous nous interesserons ici :– Aux systemes avec une seule entree et une seule sortie.– Aux systemes causaux : le systeme physique etudie ne depend que du passe et pas du futur.– Aux systemes lineaires : La grandeur de sortie et la grandeur d’entree sont liees par une equation
differentielle lineaire a coefficients constants. On aura alors s [e1 (t) + e2 (t)] = s [e1 (t)] + s [e2 (t)].– Aux systemes continus. Un systeme continu est defini pour tout instant t.
2.2 Mise en equation
2.2.1 Systeme lineaire
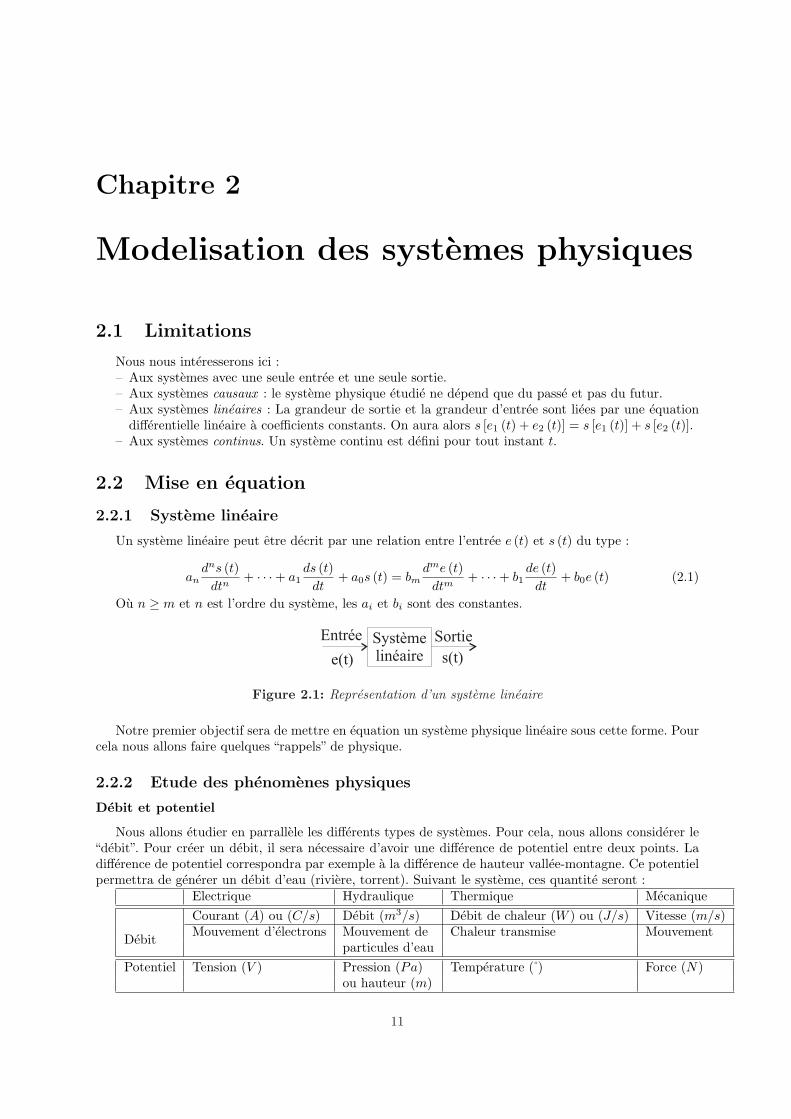
Un systeme lineaire peut etre decrit par une relation entre l’entree e (t) et s (t) du type :
andns (t)
dtn+ · · ·+ a1
ds (t)dt
+ a0s (t) = bmdme (t)
dtm+ · · ·+ b1
de (t)dt
+ b0e (t) (2.1)
Ou n ≥ m et n est l’ordre du systeme, les ai et bi sont des constantes.
Systèmelinéaire
Entrée
e(t) s(t)
Sortie
Figure 2.1: Representation d’un systeme lineaire
Notre premier objectif sera de mettre en equation un systeme physique lineaire sous cette forme. Pourcela nous allons faire quelques “rappels” de physique.
2.2.2 Etude des phenomenes physiques
Debit et potentiel
Nous allons etudier en parrallele les differents types de systemes. Pour cela, nous allons considerer le“debit”. Pour creer un debit, il sera necessaire d’avoir une difference de potentiel entre deux points. Ladifference de potentiel correspondra par exemple a la difference de hauteur vallee-montagne. Ce potentielpermettra de generer un debit d’eau (riviere, torrent). Suivant le systeme, ces quantite seront :
Electrique Hydraulique Thermique Mecanique
Debit
Courant (A) ou (C/s) Debit (m3/s) Debit de chaleur (W ) ou (J/s) Vitesse (m/s)Mouvement d’electrons Mouvement de Chaleur transmise Mouvement
particules d’eauPotentiel Tension (V ) Pression (Pa) Temperature ( ) Force (N)
ou hauteur (m)
11
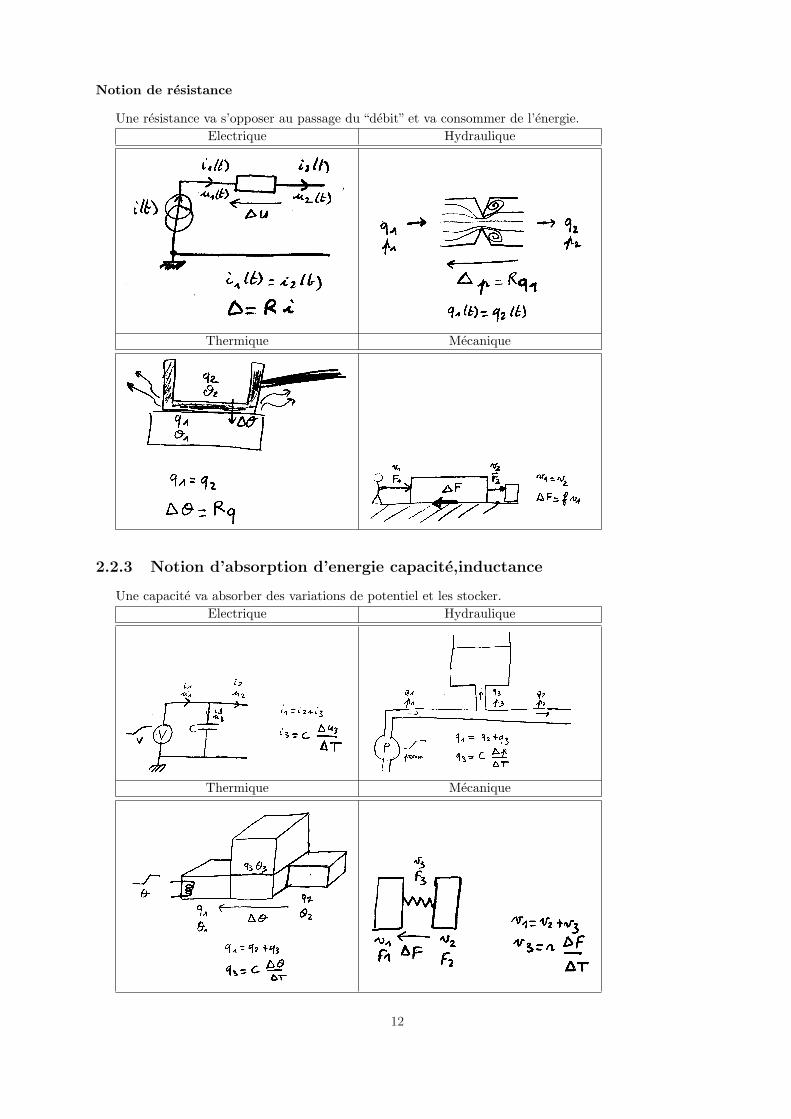
Notion de resistance
Une resistance va s’opposer au passage du “debit” et va consommer de l’energie.Electrique Hydraulique
Thermique Mecanique
2.2.3 Notion d’absorption d’energie capacite,inductance
Une capacite va absorber des variations de potentiel et les stocker.Electrique Hydraulique
Thermique Mecanique
12
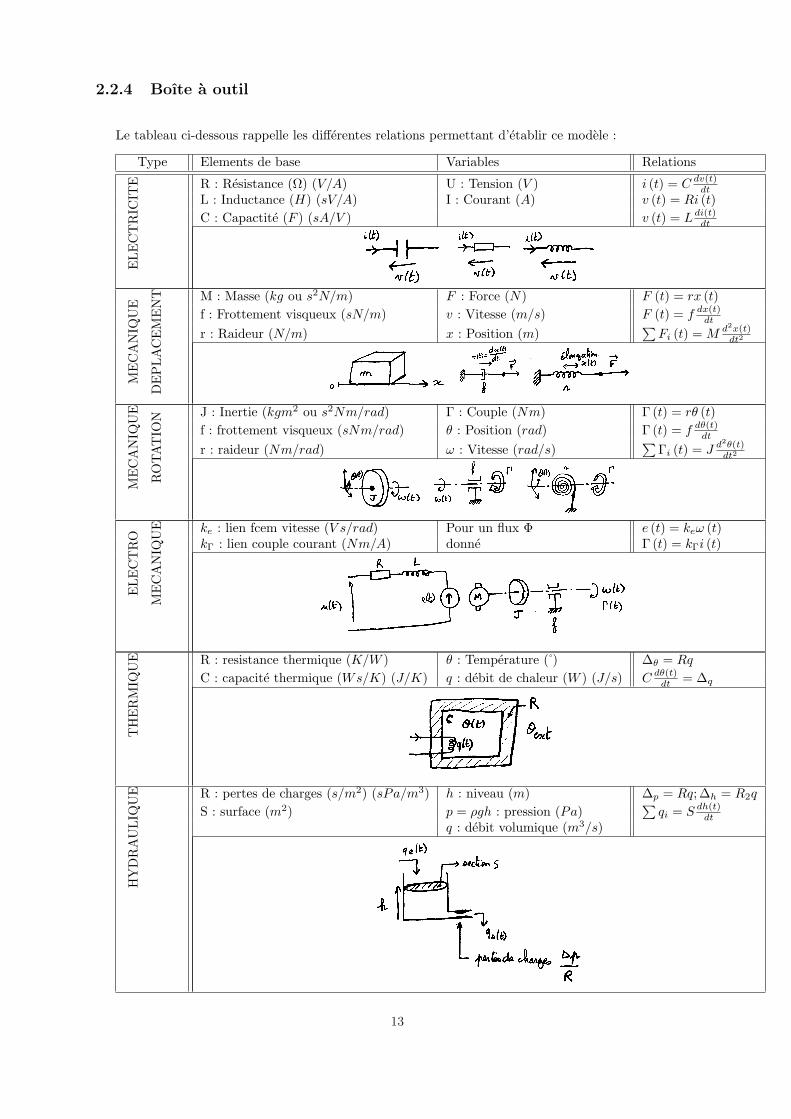
2.2.4 Boıte a outil
Le tableau ci-dessous rappelle les differentes relations permettant d’etablir ce modele :
Type Elements de base Variables Relations
ELE
CT
RIC
ITE R : Resistance (Ω) (V/A) U : Tension (V ) i (t) = C dv(t)
dtL : Inductance (H) (sV/A) I : Courant (A) v (t) = Ri (t)C : Capactite (F ) (sA/V ) v (t) = Ldi(t)
dt
ME
CA
NIQ
UE
DE
PLA
CE
ME
NT M : Masse (kg ou s2N/m) F : Force (N) F (t) = rx (t)
f : Frottement visqueux (sN/m) v : Vitesse (m/s) F (t) = f dx(t)dt
r : Raideur (N/m) x : Position (m)∑
Fi (t) = M d2x(t)dt2
ME
CA
NIQ
UE
RO
TA
TIO
N J : Inertie (kgm2 ou s2Nm/rad) Γ : Couple (Nm) Γ (t) = rθ (t)f : frottement visqueux (sNm/rad) θ : Position (rad) Γ (t) = f dθ(t)
dt
r : raideur (Nm/rad) ω : Vitesse (rad/s)∑
Γi (t) = J d2θ(t)dt2
ELE
CT
RO
ME
CA
NIQ
UE ke : lien fcem vitesse (V s/rad) Pour un flux Φ e (t) = keω (t)
kΓ : lien couple courant (Nm/A) donne Γ (t) = kΓi (t)
TH
ER
MIQ
UE R : resistance thermique (K/W ) θ : Temperature ( ) ∆θ = Rq
C : capacite thermique (Ws/K) (J/K) q : debit de chaleur (W ) (J/s) C dθ(t)dt = ∆q
HY
DR
AU
LIQ
UE R : pertes de charges (s/m2) (sPa/m3) h : niveau (m) ∆p = Rq;∆h = R2q
S : surface (m2) p = ρgh : pression (Pa)∑
qi = S dh(t)dt
q : debit volumique (m3/s)
13
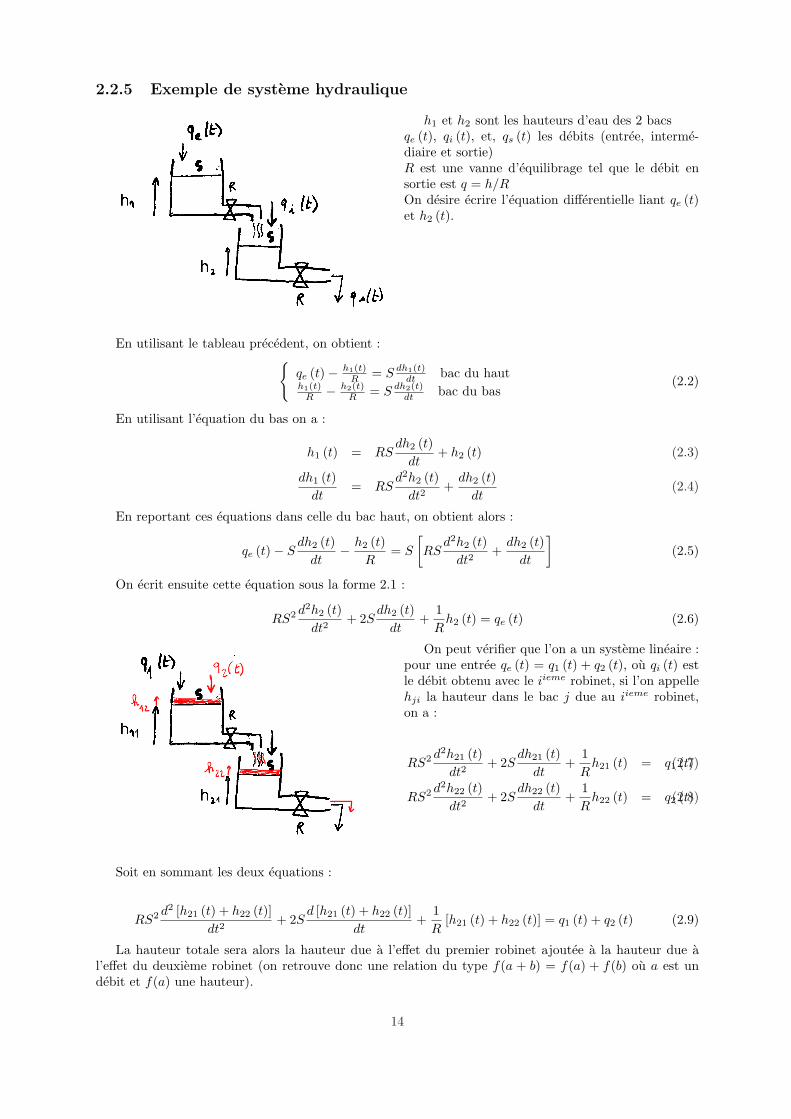
2.2.5 Exemple de systeme hydraulique
h1 et h2 sont les hauteurs d’eau des 2 bacsqe (t), qi (t), et, qs (t) les debits (entree, interme-diaire et sortie)R est une vanne d’equilibrage tel que le debit ensortie est q = h/ROn desire ecrire l’equation differentielle liant qe (t)et h2 (t).
En utilisant le tableau precedent, on obtient :
qe (t)− h1(t)R = S dh1(t)
dt bac du hauth1(t)
R − h2(t)R = S dh2(t)
dt bac du bas(2.2)
En utilisant l’equation du bas on a :
h1 (t) = RSdh2 (t)
dt+ h2 (t) (2.3)
dh1 (t)dt
= RSd2h2 (t)
dt2+
dh2 (t)dt
(2.4)
En reportant ces equations dans celle du bac haut, on obtient alors :
qe (t)− Sdh2 (t)
dt− h2 (t)
R= S
[RS
d2h2 (t)dt2
+dh2 (t)
dt
](2.5)
On ecrit ensuite cette equation sous la forme 2.1 :
RS2 d2h2 (t)dt2
+ 2Sdh2 (t)
dt+
1R
h2 (t) = qe (t) (2.6)
On peut verifier que l’on a un systeme lineaire :pour une entree qe (t) = q1 (t) + q2 (t), ou qi (t) estle debit obtenu avec le iieme robinet, si l’on appellehji la hauteur dans le bac j due au iieme robinet,on a :
RS2 d2h21 (t)dt2
+ 2Sdh21 (t)
dt+
1R
h21 (t) = q1 (t)(2.7)
RS2 d2h22 (t)dt2
+ 2Sdh22 (t)
dt+
1R
h22 (t) = q2 (t)(2.8)
Soit en sommant les deux equations :
RS2 d2 [h21 (t) + h22 (t)]dt2
+ 2Sd [h21 (t) + h22 (t)]
dt+
1R
[h21 (t) + h22 (t)] = q1 (t) + q2 (t) (2.9)
La hauteur totale sera alors la hauteur due a l’effet du premier robinet ajoutee a la hauteur due al’effet du deuxieme robinet (on retrouve donc une relation du type f(a + b) = f(a) + f(b) ou a est undebit et f(a) une hauteur).
14

2.2.6 Limite des equations differentielles, Transforme de Laplace
Lorsque l’entree est simple (constante) et que le systeme est simple, on peut resoudre l’equationdifferentielle. Neanmoins, pour des fonctions plus compliquees, on utilisera d’autres outils :
Transformee cissoıdale
Les calculs sont fait a l’aide de fonctions du type i (t) = ejωt. Les proprietes de l’exponentielle per-mettent d’ecrire :
di (t)dt
= jωejωt = jωi (t) (2.10)
On obtient alors en electricite des equations du type :
V = jLωI (2.11)
V =I
jCω(2.12)
Cette formulation, est tres pratique pour tracer les diagrammes de Bode d’un filtre par exemple.Neanmoins, elle ne permet pas de prendre en compte directement deux frequences ω1 et ω2 dans unememe equation.
Transformee de Laplace
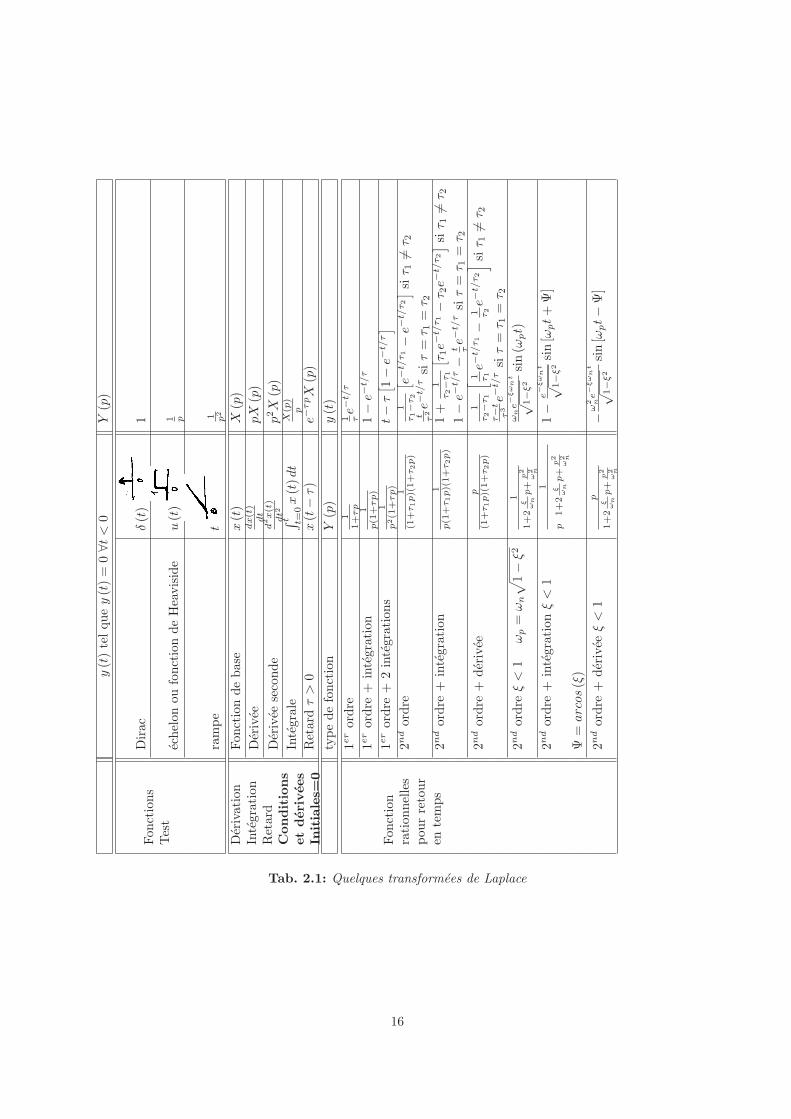
La transformee de Laplace est plus generale, puisque l’on ne se limite pas aux signaux du typei (t) = ejωt mais a n’importe quel signal i (t) admettant une transformee de Laplace. En contrepartie,on utilisera la variable muette p dans V (p). L’interet de la transformee de Laplace est de remplacerla manipulation directe d’equations differentielles par une manipulation de polynomes plus simple. Lepassage du domaine temporel au domaine de Laplace se faisant a l’aide de tables.
Le tableau 2.1 indique quelques transformees de Laplace interessantes.Il sera possible de revenir a la transformee cissoıdale en posant p = jω. On pourra alors tracer un
diagramme de Bode.
2.3 Fonction de transfert
Afin de benificier de l’avantage de la transformee de Laplace, il est possible de re-ecrire l’equation 2.1suivant la variable p. Si l’on appelle E (p) et S (p) les transformees de Laplace de e (p) et de s (t) et sil’on remarque que pour des conditions initiales et derivees a l’origine nulles la derivation suivantle temps correspond a une multiplication par p dans le domaine de Laplace. On peut ecrire pour desconditions initiales et derivees a l’origine nulles :
anpnS (p) + · · ·+ a1pS (p) + a0S (p) = bmpmE (p) + · · ·+ b1pE (p) + b0E (p) n ≥ m (2.13)
Soit :
H (p) =S (p)E (p)
=bmpm + · · ·+ b1p + b0
anpn + · · ·+ a1p + a0n ≥ m (2.14)
Remarque pour les currieux :La fonction de transfert est toujours exprimee pour des conditions initiales nulles. En d’autres termes,
la sortie du systeme pourra etre decomposee en :– une reponse forcee imposee par l’entree qui passe au travers du systeme modelise par sa fonction
de transfert,– une reponse libre due a l’etat initial du systeme et ne dependant pas de l’entree.Pour mieux comprendre, imaginez un circuit electrique contenant des condensateurs charges. A la mise
sous tension, il y aura des phenomenes transitoires (decharge des condensateurs, ...) qui feront evoluerla sortie independamment de l’entree. Heureusement, cette reponse libre tendra en general vers 0 assezrapidement. C’est pourquoi on ne se preoccupera plus par la suite de cette reponse libre.
15
y(t
)te
lque
y(t
)=
0∀t
<0
Y(p
)
Fonc
tion
sTes
t
Dir
acδ(t
)1
eche
lon
oufo
nction
deH
eavi
side
u(t
)1 p
ram
pet
1 p2
Der
ivat
ion
Inte
grat
ion
Ret
ard
Con
ditio
ns
etder
ivee
sIn
itia
les=
0
Fonc
tion
deba
sex
(t)
X(p
)D
eriv
eedx(t
)dt
pX
(p)
Der
ivee
seco
nde
d2x(t
)dt2
p2X
(p)
Inte
gral
e∫ t t=
0x
(t)d
tX
(p)
p
Ret
ard
τ>
0x
(t−
τ)
e−τpX
(p)
type
defo
nction
Y(p
)y
(t)
Fonc
tion
ration
nelle
spo
urre
tour
ente
mps
1er
ordr
e1
1+
τp
1 τe−
t/τ
1er
ordr
e+
inte
grat
ion
1p(1
+τp)
1−
e−t/
τ
1er
ordr
e+
2in
tegr
atio
ns1
p2(1
+τp)
t−
τ[ 1−
e−t/
τ]
2nd
ordr
e1
(1+
τ1p)(
1+
τ2p)
1τ1−
τ2
[ e−t/
τ1−
e−t/
τ2] si
τ 16=
τ 2t τ2e−
t/τ
siτ
=τ 1
=τ 2
2nd
ordr
e+
inte
grat
ion
1p(1
+τ1p)(
1+
τ2p)
1+
1τ2−
τ1
[ τ 1e−
t/τ1−
τ 2e−
t/τ2] si
τ 16=
τ 2
1−
e−t/
τ−
t τe−
t/τ
siτ
=τ 1
=τ 2
2nd
ordr
e+
deri
vee
p(1
+τ1p)(
1+
τ2p)
1τ2−
τ1
[ 1 τ1e−
t/τ1−
1 τ2e−
t/τ2
] siτ 16=
τ 2τ−
tτ3
e−t/
τsi
τ=
τ 1=
τ 2
2nd
ordr
eξ
<1
ωp
=ω
n
√1−
ξ21
1+
2ξ
ωn
p+
p2
ω2 n
ωn
e−
ξω
nt
√ 1−
ξ2
sin
(ωpt)
2nd
ordr
e+
inte
grat
ion
ξ<
11
p
1+
2ξ
ωn
p+
p2
ω2 n
1−
e−
ξω
nt
√ 1−
ξ2
sin
[ωpt+
Ψ]
Ψ=
arc
os(ξ
)2n
dor
dre
+de
rive
eξ
<1
p
1+
2ξ
ωn
p+
p2
ω2 n
−ω
2 ne−
ξω
nt
√ 1−
ξ2
sin
[ωpt−
Ψ]
Tab. 2.1: Quelques transformees de Laplace
16
Par exemple, la fonction de transfert d’un filtre passe bas de type RC est de la forme :
H (p) =1/R
1 + RCp(2.15)
Maintenant nous pouvons alors maintenant decrire le systeme a l’aide de H (p) et calculer n’importequ’elle reponse associee a une fonction E (p). La relation S (p) = H (p) E (p) se represente de la faconsuivante :
H(p)Entrée
E(p) S(p)
Sortie
Figure 2.2: Systeme represente par sa fonction de transfert
2.4 Schema fonctionnel
La figure precedente est un schema fonctionnel. Elle fait apparaıtre dans une boıte la relation entrel’entree et la sortie. Nous allons maintenant voir d’autres elements de base pour realiser un schemafonctionnel.
En principe, le schema fonctionnel n’apporte pas plus d’informations qu’un ensemble de relationsmathematiques. En fait, il est bien superieur pour permettre de juger d’un “coup d’œil” de la structureet des relations de cause a effet presentes dans le systeme.
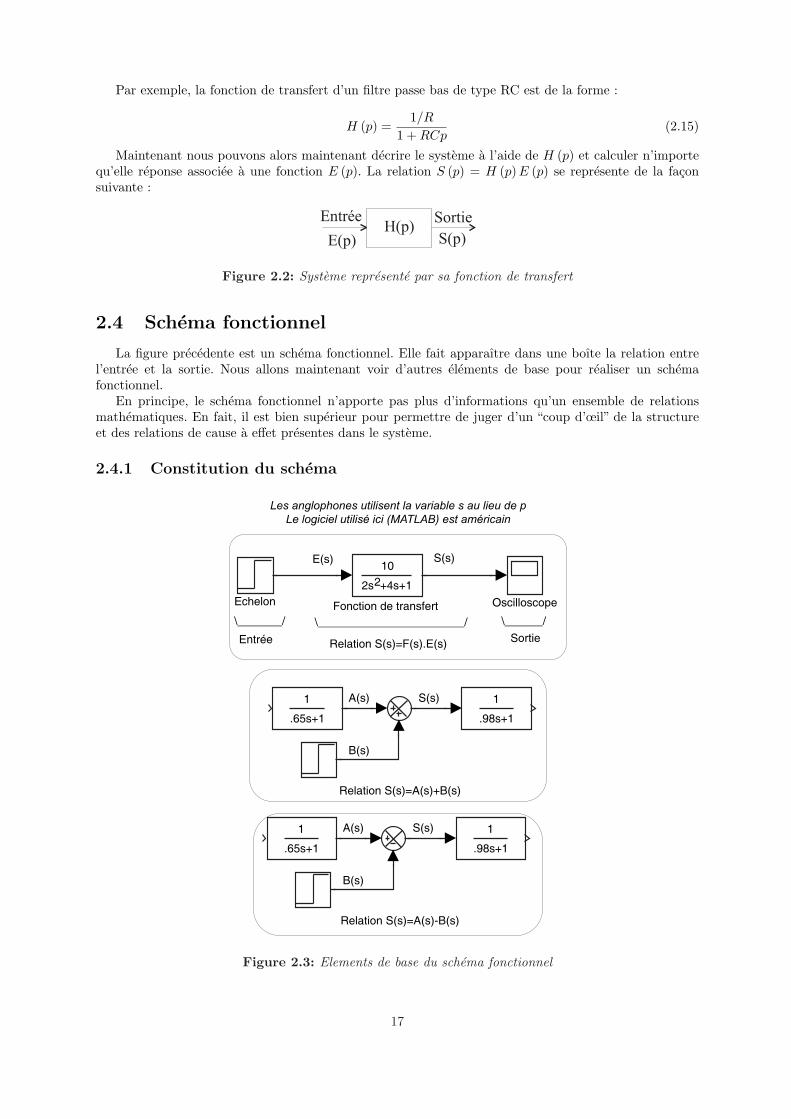
2.4.1 Constitution du schema
Figure 2.3: Elements de base du schema fonctionnel
17
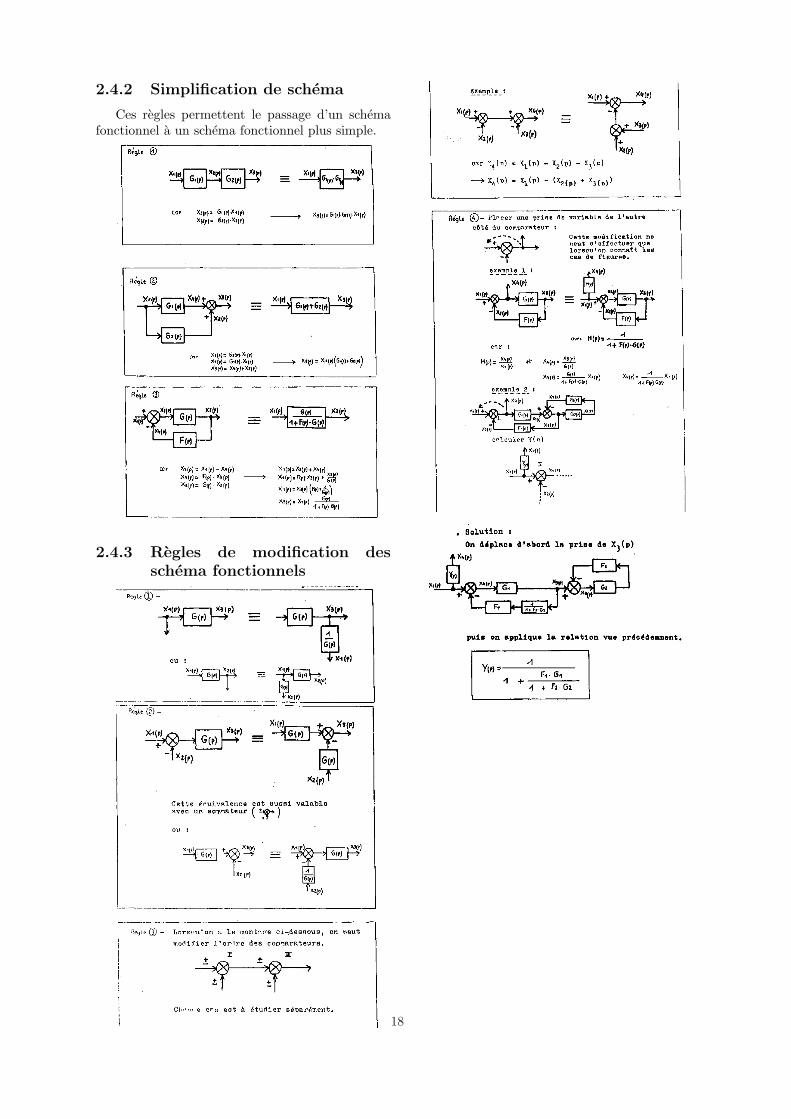
2.4.2 Simplification de schema
Ces regles permettent le passage d’un schemafonctionnel a un schema fonctionnel plus simple.
2.4.3 Regles de modification desschema fonctionnels
18
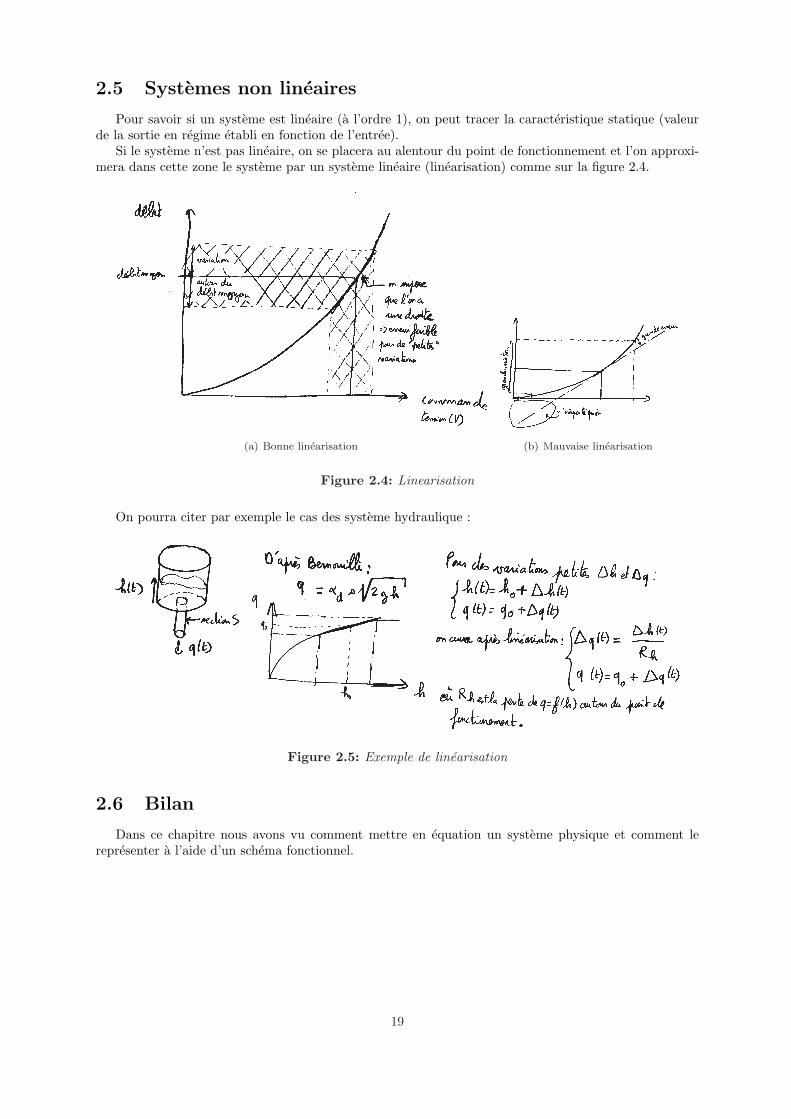
2.5 Systemes non lineaires
Pour savoir si un systeme est lineaire (a l’ordre 1), on peut tracer la caracteristique statique (valeurde la sortie en regime etabli en fonction de l’entree).
Si le systeme n’est pas lineaire, on se placera au alentour du point de fonctionnement et l’on approxi-mera dans cette zone le systeme par un systeme lineaire (linearisation) comme sur la figure 2.4.
(a) Bonne linearisation (b) Mauvaise linearisation
Figure 2.4: Linearisation
On pourra citer par exemple le cas des systeme hydraulique :
Figure 2.5: Exemple de linearisation
2.6 Bilan
Dans ce chapitre nous avons vu comment mettre en equation un systeme physique et comment lerepresenter a l’aide d’un schema fonctionnel.
19

Chapitre 3
Etude des systemes lineaires
Dans le chapitre precedent, nous avons mis en evidence la similarite entre les differents systemesphysiques (electrique, thermique, mecanique, ...). Nous avons vu la fonction de transfert qui permettaitde caracteriser la relation entre l’entree et la sortie. Cette fonction de transfert est le rapport de deuxpolynomes.
Dans ce chapitre nous allons etudier des fonctions de transfert types (1er, 2eme ordre).
3.1 Reponse d’un systeme lineaire a des fonctions test
Pour etudier la reponse du systeme (circuit RC, bac d’eau, moteur, ...), nous allons exciter l’entree al’aide de fonctions test (echelon, rampe, impulsions, ...) et nous allons observer la sortie. Suivant le typede processus etudie certaines fonctions test seront plus ou moins faciles a realiser. En mecanique, uneimpulsion sera obtenue en tapant a l’aide d’un marteau, un echelon en jetant une masse sur le systeme.
3.1.1 Notion de fonction generique
Figure 3.1: Mise en evidence de la fonction gene-rique
Nous nous limiterons ici aux ordres 1 et 2. Pourun systeme a l’ordre 2, par exemple, il y aura plu-sieurs fonctions de transfert possible selon l’ordredu numerateur.
On sait qu’une multiplication par p corresponda une derivation, cela signifie, que si l’entree est uneposition, le terme constant correspond a l’influencede la position, le terme en p du denominateur cor-respond a l’influence de la vitesse, le terme en p2
a l’influence de l’acceleration. Il est alors possiblede modifier le schema fonctionnel pour faire appa-raıtre la fonction de transfert generique comportantseulement un gain au numerateur qui aura pour en-tree la position, la vitesse, ... Il sera alors possiblede reconstruire la sortie en combinant les reponsesa la fonction test, a sa derivee, ...
3.1.2 Temps de reponse a 5 %
Le temps de reponse a 5% permet de caracteriser la rapidite d’un systeme. Pour la determiner, on tracedeux traits horizontaux correspondant respectivement a 95% et 105% de la valeur finale. On recherchel’instant a partir duquel la sortie reste dans la zone delimitee par ces deux traits. Cet instant est appelletemps de reponse a 5%.
21
Ord
reE
xem
ples
Fonc
tion
detr
ansf
ert
Rep
onse
aun
eim
puls
ion
Rep
onse
indi
ciel
le(e
chel
on)
Rep
onse
aun
era
mpe
1H
(p)=
S(p
)E
(p)
=K
1+
τp
E(p
)=
1E
(p)=
1/p
E(p
)=
1/p2
K:g
ain
S(p
)=
H(p
)E(p
)=
K1+
τp
S(p
)=
Kp(1
+τp)
S(p
)=
Kp2(1
+τp)
τco
nsta
nte
dete
mps
(s)
s(t
)=
K τe−
t/τ
s(t
)=
K[ 1−
e−t/
τ]
s(t
)=
K[t−
τ(1−
e−tτ
)]
−10
1 2
3 4
56
70
0.2
0.4
0.6
0.81
Ent
rée
Sor
tie
t/τ
s(t)
/K
τ
1/τ
−10
12
34
56
7
0
0.2
0.4
0.6
0.8
.95
Ent
rée
Sor
tie
t/τ
s(t)/
K
−10
12
34
56
701234567
Ent
rée
Sor
tie
s(t)/
K
τ
Kτ s
i
on
trace
s(t)
au li
eu d
e s(
t)/K
t/τ
2
H(p
)=
K
1+
2ξ
ωn
p+
p2
ω2 n
ξ≥
12
pole
sre
els
nega
tifs⇔
2co
nsta
ntes
dete
mps
reel
les
posi
tive
s⇔
2bl
ocs“
1er
ordr
e”
∆=
4 ω2 n
( ξ2−
1)S
(p)=
K(1
+τ1p)(
1+
τ2p)
S(p
)=
Kp(1
+τ1p)(
1+
τ2p)
K:g
ain
ωn
:pu
lsat
ion
natu
relle
ξ:am
ortiss
emen
t
s(t
)=
K
τ1−
τ2
[ e−t/
τ1−
e−t/
τ2]
Kt
τ2e−
t/τ
siτ
=τ 1
=τ 2
s(t
)=
K
[ 1+
1τ2−
τ1
( τ 1e−
t/τ1−
τ 2e−
t/τ2)]
K( 1−
e−t/
τ−
t τe−
t/τ)
siτ
=τ 1
=τ 2
0 2
4 6
8 10
0
0.1
0.2
0.3
0.4
E
ntré
eS
ortie
t
s(t)/
K
τ 1=1τ 2=2
.9
0 2
4 6
8 10
0
0.2
0.4
0.6
0.81
Ent
rée
Sor
tie
s(t)/
K
τ 1=1
τ 2=2.9
t
ωp
=ω
n
√1−
ξ20
<ξ
<1
2po
les
com
plex
esco
njug
ues
p1,2
=−ξ
ωn±
ωn
√ξ2−
1=−1
/τ1,2
S(p
)=
K
1+
2ξ
ωn
p+
p2
ω2 n
S(p
)=
K
p
1+
2ξ
ωn
p+
p2
ω2 n
Aut
res
cas
:
ξ=
0⇒
osci
llate
ur−1
<ξ
<0⇒
osci
llant
dive
rgen
tξ
<−1
⇒ap
erio
diqu
edi
verg
ent
s(t
)=
ωn
e−
ξω
nt
√ 1−
ξ2
sin
(ωpt)
s(t
)=
1−
e−
ξω
nt
√ 1−
ξ2
sin
[ωpt+
Ψ]
02
46
−2
−1
0
1
2
π/ω p ±w
nexp[
−ξω
nt]
t
s(t)
/K
ω n=3 ξ
=0.2
0 2
4 6
0
0.4
0.8
1.2
1.6
Ent
rée
Sor
tie
π/ω
p
ωn=3
ξ=0
.2
1±ex
p(−ξ
ωnt)
]
s(t)
/K
22
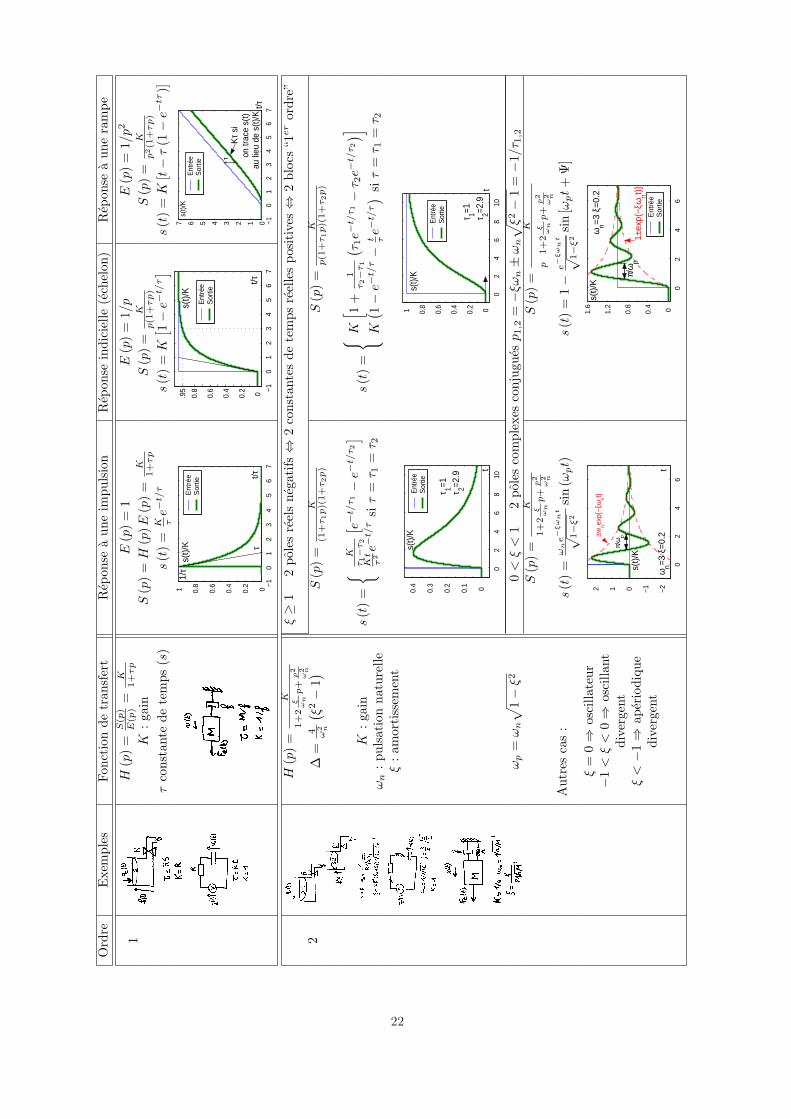
3.1.3 Etude des systeme du premier et second ordre
Le tableau a la page precedente synthetise les reponses a differentes fonctions test.
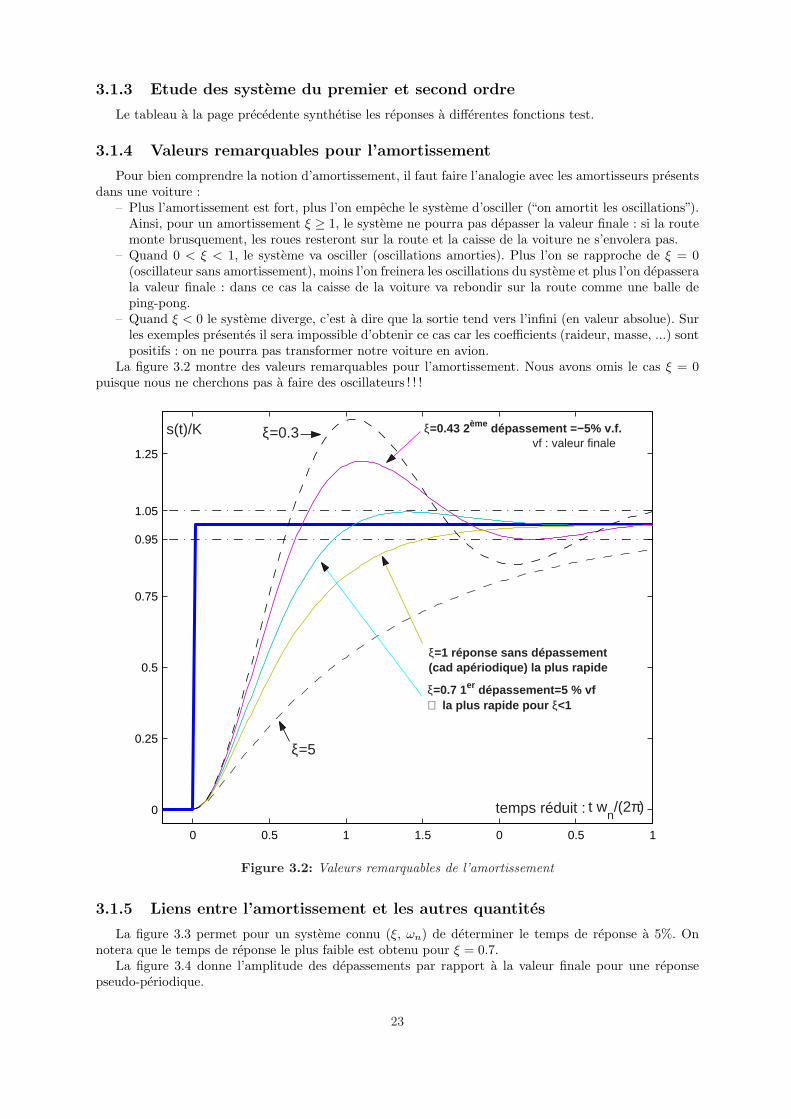
3.1.4 Valeurs remarquables pour l’amortissement
Pour bien comprendre la notion d’amortissement, il faut faire l’analogie avec les amortisseurs presentsdans une voiture :
– Plus l’amortissement est fort, plus l’on empeche le systeme d’osciller (“on amortit les oscillations”).Ainsi, pour un amortissement ξ ≥ 1, le systeme ne pourra pas depasser la valeur finale : si la routemonte brusquement, les roues resteront sur la route et la caisse de la voiture ne s’envolera pas.
– Quand 0 < ξ < 1, le systeme va osciller (oscillations amorties). Plus l’on se rapproche de ξ = 0(oscillateur sans amortissement), moins l’on freinera les oscillations du systeme et plus l’on depasserala valeur finale : dans ce cas la caisse de la voiture va rebondir sur la route comme une balle deping-pong.
– Quand ξ < 0 le systeme diverge, c’est a dire que la sortie tend vers l’infini (en valeur absolue). Surles exemples presentes il sera impossible d’obtenir ce cas car les coefficients (raideur, masse, ...) sontpositifs : on ne pourra pas transformer notre voiture en avion.
La figure 3.2 montre des valeurs remarquables pour l’amortissement. Nous avons omis le cas ξ = 0puisque nous ne cherchons pas a faire des oscillateurs ! ! !
0 0.5 1 1.5 0 0.5 1
0
0.25
0.5
0.75
0.95
1.05
1.25
ξ=0.7 1er dépassement=5 % vf⇒ la plus rapide pour ξ<1
ξ=0.43 2ème dépassement =−5% v.f.vf : valeur finale
ξ=1 réponse sans dépassement(cad apériodique) la plus rapide
ξ=0.3
ξ=5
t wn/(2π)
s(t)/K
temps réduit :
Figure 3.2: Valeurs remarquables de l’amortissement
3.1.5 Liens entre l’amortissement et les autres quantites
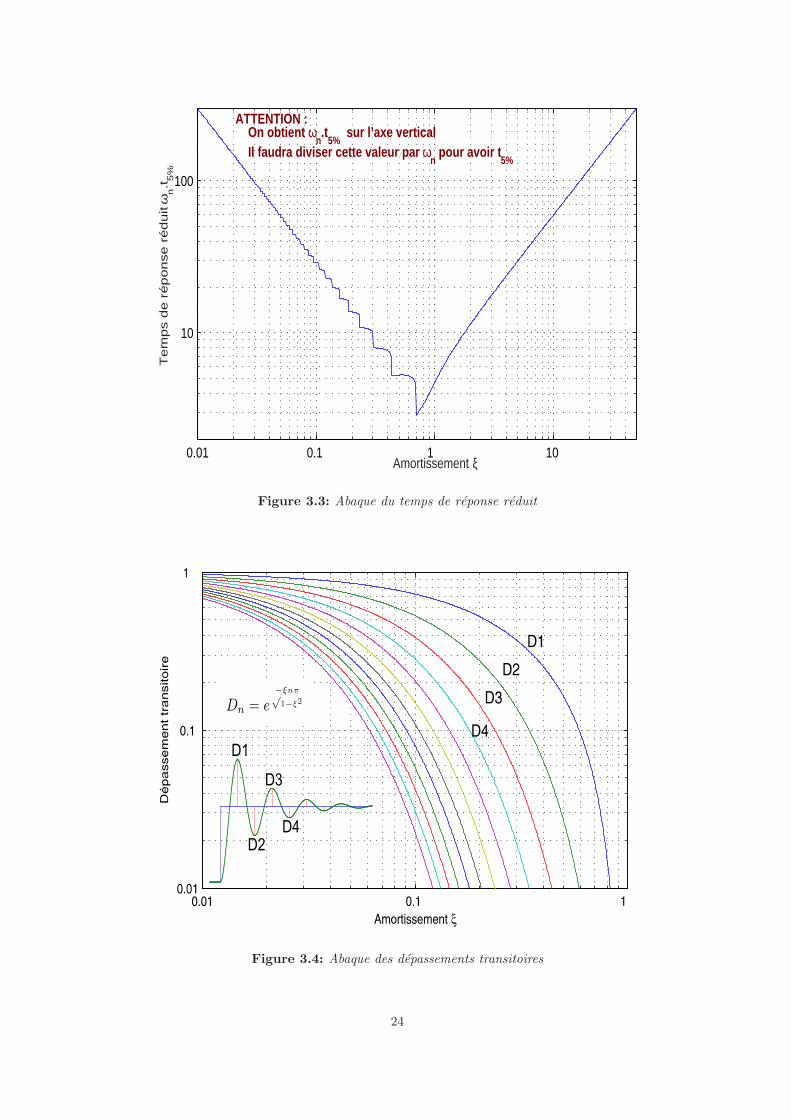
La figure 3.3 permet pour un systeme connu (ξ, ωn) de determiner le temps de reponse a 5%. Onnotera que le temps de reponse le plus faible est obtenu pour ξ = 0.7.
La figure 3.4 donne l’amplitude des depassements par rapport a la valeur finale pour une reponsepseudo-periodique.
23
0.01 0.1 1 10
10
100T
em
ps d
e r
ép
on
se
ré
du
it ω
n.t
5%
Amortissement ξ
ATTENTION : On obtient ω
n.t
5% sur l’axe vertical
Il faudra diviser cette valeur par ωn pour avoir t
5%
Figure 3.3: Abaque du temps de reponse reduit
D1
D2
D3
D4
Figure 3.4: Abaque des depassements transitoires
24
3.2 Identification temporelle
Jusqu’a present nous avons cherche a connaıtre la reponse d’un systeme donne a differentes excitations.Il est egalement possible de poser le probleme a l’envers : connaissant les reponses a une excitation, onpourra rechercher a identifier le systeme. Par exemple, retrouver la constante de temps d’un circuit RC.
L’identification du gain K est triviale : pour un echelon, on observe le rapport entre la consigne et lavaleur finale (regime etabli).
3.2.1 Ordre 1
On peut remarquer sur le tableau precedent que la derivee d’un systeme d’ordre 1 a l’originen’est jamais nulle pour une reponse a un echelon contrairement aux systemes d’ordre 2 pourune exitation de type echelon. Pour un systeme a l’ordre 1, les constantes sont assez faciles a faireapparaıtre en observant le regime transitoire (cf. tableau precedent).
– Sur une reponse impulsionnelle : la derivee a l’origine coupe l’axe temporel en t = τ .
– Sur une reponse a un echelon : on prolonge la valeur finale (trait horizontal). La derivee a l’originecoupe ce trait en t = τ .
– s (t) atteind 95% de sa valeur finale au bout de 3τ (temps de reponse a 5%).– s (t) atteind 63% de sa valeur finale au bout de τ .– si on ne connait pas la valeur finale, on peut utiliser la methode des 2 points : on choisit un
temps t1 tel que s (t1) et s (2t1) soient tres differents. On a alors pour une reponse a un echelon :τ = t1
lnh
s(2t1)s(t1) −1
i et K = s(t1)
1−e−t1/τ .
– Sur une reponse a une rampe : on mesure l’ecart de trainage (attention, aux echelles).Il sera interessant de combiner plusieurs methodes pour l’identification afin de confirmer ou infirmer
les estimations des differents parametres.
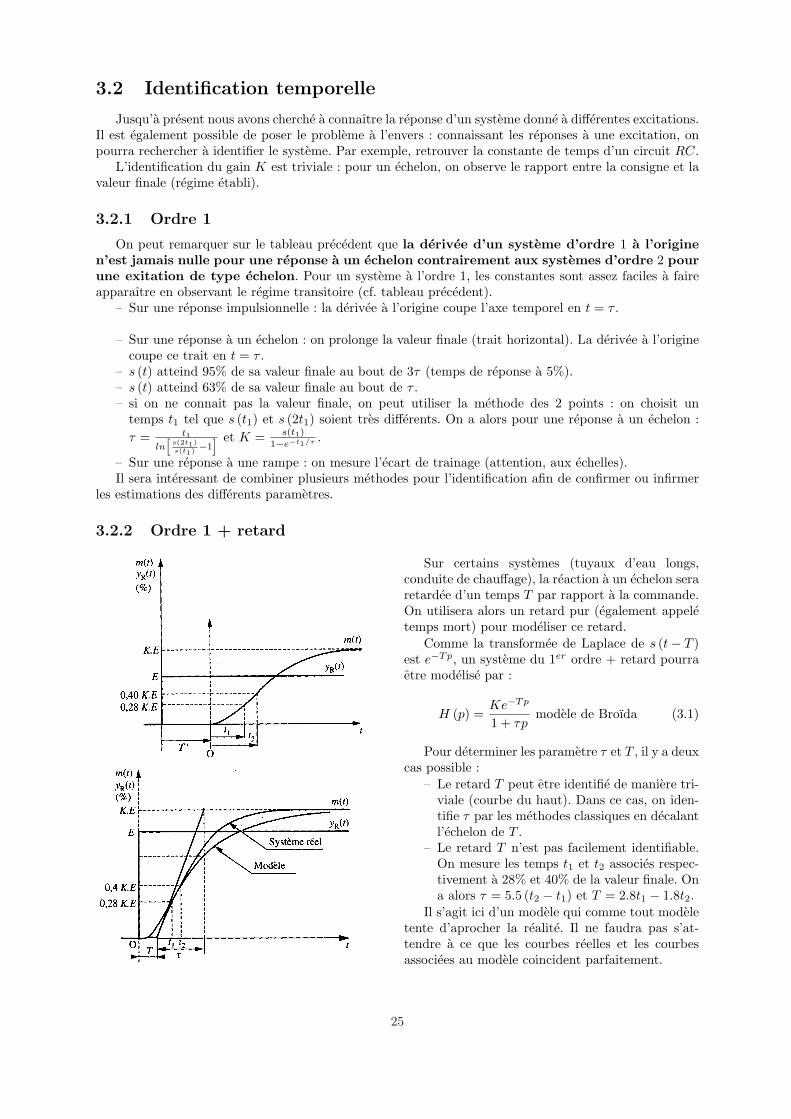
3.2.2 Ordre 1 + retard
Sur certains systemes (tuyaux d’eau longs,conduite de chauffage), la reaction a un echelon seraretardee d’un temps T par rapport a la commande.On utilisera alors un retard pur (egalement appeletemps mort) pour modeliser ce retard.
Comme la transformee de Laplace de s (t− T )est e−Tp, un systeme du 1er ordre + retard pourraetre modelise par :
H (p) =Ke−Tp
1 + τpmodele de Broıda (3.1)
Pour determiner les parametre τ et T , il y a deuxcas possible :
– Le retard T peut etre identifie de maniere tri-viale (courbe du haut). Dans ce cas, on iden-tifie τ par les methodes classiques en decalantl’echelon de T .
– Le retard T n’est pas facilement identifiable.On mesure les temps t1 et t2 associes respec-tivement a 28% et 40% de la valeur finale. Ona alors τ = 5.5 (t2 − t1) et T = 2.8t1 − 1.8t2.
Il s’agit ici d’un modele qui comme tout modeletente d’aprocher la realite. Il ne faudra pas s’at-tendre a ce que les courbes reelles et les courbesassociees au modele coincident parfaitement.
25
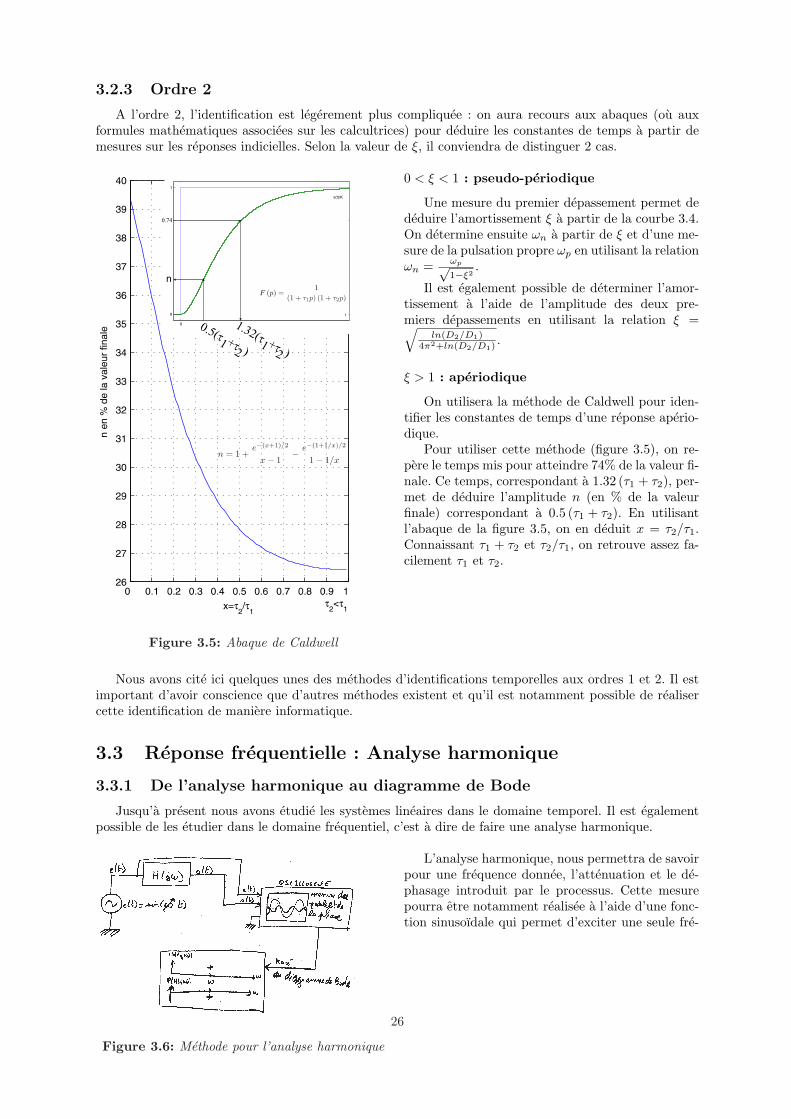
3.2.3 Ordre 2
A l’ordre 2, l’identification est legerement plus compliquee : on aura recours aux abaques (ou auxformules mathematiques associees sur les calcultrices) pour deduire les constantes de temps a partir demesures sur les reponses indicielles. Selon la valeur de ξ, il conviendra de distinguer 2 cas.
n
1.32(1 +
2 )
t
t
0.5(1 +
2 )
t
t
0.74
Figure 3.5: Abaque de Caldwell
0 < ξ < 1 : pseudo-periodique
Une mesure du premier depassement permet dededuire l’amortissement ξ a partir de la courbe 3.4.On determine ensuite ωn a partir de ξ et d’une me-sure de la pulsation propre ωp en utilisant la relationωn = ωp√
1−ξ2.
Il est egalement possible de determiner l’amor-tissement a l’aide de l’amplitude des deux pre-miers depassements en utilisant la relation ξ =√
ln(D2/D1)4π2+ln(D2/D1)
.
ξ > 1 : aperiodique
On utilisera la methode de Caldwell pour iden-tifier les constantes de temps d’une reponse aperio-dique.
Pour utiliser cette methode (figure 3.5), on re-pere le temps mis pour atteindre 74% de la valeur fi-nale. Ce temps, correspondant a 1.32 (τ1 + τ2), per-met de deduire l’amplitude n (en % de la valeurfinale) correspondant a 0.5 (τ1 + τ2). En utilisantl’abaque de la figure 3.5, on en deduit x = τ2/τ1.Connaissant τ1 + τ2 et τ2/τ1, on retrouve assez fa-cilement τ1 et τ2.
Nous avons cite ici quelques unes des methodes d’identifications temporelles aux ordres 1 et 2. Il estimportant d’avoir conscience que d’autres methodes existent et qu’il est notamment possible de realisercette identification de maniere informatique.
3.3 Reponse frequentielle : Analyse harmonique
3.3.1 De l’analyse harmonique au diagramme de Bode
Jusqu’a present nous avons etudie les systemes lineaires dans le domaine temporel. Il est egalementpossible de les etudier dans le domaine frequentiel, c’est a dire de faire une analyse harmonique.
Figure 3.6: Methode pour l’analyse harmonique
L’analyse harmonique, nous permettra de savoirpour une frequence donnee, l’attenuation et le de-phasage introduit par le processus. Cette mesurepourra etre notamment realisee a l’aide d’une fonc-tion sinusoıdale qui permet d’exciter une seule fre-
26

quence comme l’indique la figure 3.6. En faisant va-rier cette frequence, on sera capable de tracer le
module et le dephasage pour chaque frequence.
Sur cette figure, nous avons utilise le diagramme de Bode pour tracer l’evolution du module et de laphase en fonction de la frequence. Pour plus de simplicite nous nous limiterons a cette representation. Ilexiste neanmoins d’autres types de representation (diagramme de Nyquist, diagramme de Black).
Dans le chapitre 2.2.6, nous avons fait le lien entre la transforme de Laplace (entree quelconque) etla transforme cissoıdale (entree du type e (t) = cos (ωt + φ) + j sin (ωt + φ)). Nous avions notammentindique que la fonction de transfert H (jω) s’obtient en posant p = jω. Nous allons donc pouvoirtracer le diagramme de Bode si l’on connait la fonction de transfert H (p).
3.3.2 Diagramme de Bode
On met la fonction de transfert sous la forme :
H (p) = Kpα (1 + τz1p) · · · (1 + τzm)
(1 + 2ξz1p/ωnz1 + p2/ωn
2z1
) · · ·(1 + 2ξzqp/ωnzq
+ p2/ωn2zq
)
pβ (1 + τp1p) · · · (1 + τpr )(1 + 2ξp1p/ωnp1 + p2/ωn
2p1
) · · · (1 + 2ξpsp/ωnps+ p2/ωn
2ps
) (3.2)
Par exemple :
H (p) =K
p (1 + τp)avec K = 1/RC et τ = RC (3.3)
Tracer le diagramme de Bode, c’est tracer 20 log10 [|H (jω)|] et arg [H (jω)]. Les proprietes du lo-garithme (log (a.b) = log (a) + log (b) et log (1/a) = −log (a) pour a > 0 et b > 0) et de la phase(arg (a.b) = arg (a)+arg (b) et arg (1/a) = − arg (a)) vont permettre de simplifier l’expression du moduleet de la phase :
|H (jω)| = 20 log10 (K) + 20α log10 (jω) + 20 log10 (1 + τz1jω) + · · ·+ 20 log10 (1 + τzmjω) (3.4)
+ 20 log10
[1 + 2ξz1jω/ωnz1 − ω2/ωn
2z1
]+ · · ·+ 20 log10
[1 + 2ξzqjω/ωnzq
− ω2/ωn2zq
](3.5)
− 20β log10 (jω) + 20 log10 (1 + τp1jω) + · · ·+ 20 log10 (1 + τprjω) (3.6)− 20 log10
[1 + 2ξz1jω/ωnz1 − ω2/ωn
2z1
]+ · · ·+ 20 log10
[1 + 2ξpsjω/ωnps
− ω2/ωn2ps
](3.7)
Ou plus simplement sur notre exemple :
|H (jω)| = 20 log10 K − 20 log10 (jω)− 20 log10 (1 + τjω) (3.8)arg [H (jω)] = arg (K)− arg (jω)− arg (1 + τjω) (3.9)
Des lors la connaissance du diagramme de Bode des motifs de base (gain K, jω, 1 + jωτ , 1 +2ξ jω/ωn − ω2/ω2
n) permettra d’en deduire ceux de tous les autres motifs.
27
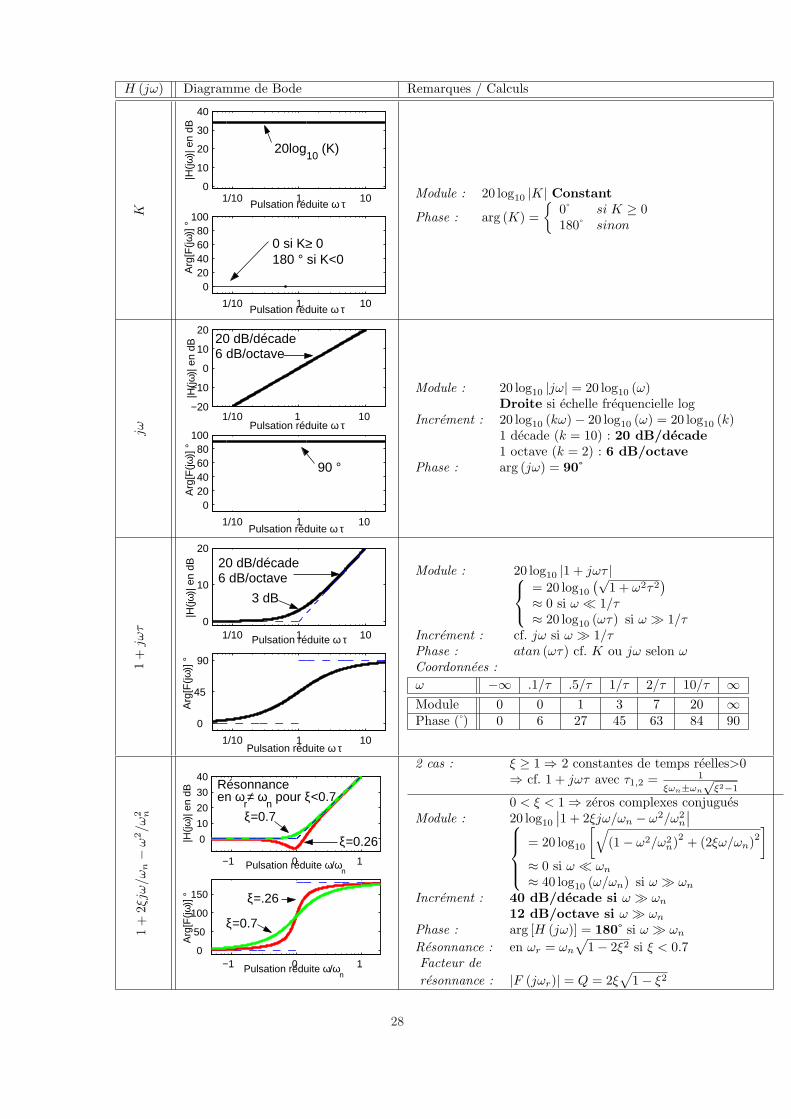
H (jω) Diagramme de Bode Remarques / Calculs
K
1/10 1 100
10
20
30
40
Pulsation réduite ω τ|H
(jω)|
en
dB
1/10 1 10
020406080
100
Pulsation réduite ω τ
Arg
[F(jω
)] °
20log10
(K)
0 si K≥ 0180 ° si K<0
Module : 20 log10 |K| Constant
Phase : arg (K) =
0 si K ≥ 0180 sinon
jω
1/10 1 10 −20
−10
0
10
20
Pulsation réduite ω τ
|H(jω
)| e
n dB
1/10 1 10
020406080
100
Pulsation réduite ω τ
Arg
[F(jω
)] °
20 dB/décade6 dB/octave
90 °
Module : 20 log10 |jω| = 20 log10 (ω)Droite si echelle frequencielle log
Increment : 20 log10 (kω)− 20 log10 (ω) = 20 log10 (k)1 decade (k = 10) : 20 dB/decade1 octave (k = 2) : 6 dB/octave
Phase : arg (jω) = 90
1+
jωτ
1/10 1 100
10
20
Pulsation réduite ω τ
|H(jω
)| e
n dB
1/10 1 10
0
45
90
Pulsation réduite ω τ
Arg
[F(jω
)] °
3 dB
20 dB/décade 6 dB/octave
Module : 20 log10 |1 + jωτ |
= 20 log10
(√1 + ω2τ2
)≈ 0 si ω ¿ 1/τ≈ 20 log10 (ωτ) si ω À 1/τ
Increment : cf. jω si ω À 1/τPhase : atan (ωτ) cf. K ou jω selon ωCoordonnees :ω −∞ .1/τ .5/τ 1/τ 2/τ 10/τ ∞Module 0 0 1 3 7 20 ∞Phase ( ) 0 6 27 45 63 84 90
1+
2ξjω
/ωn−
ω2/ω
2 n
−1 0 1
0
10
20
30
40
Pulsation réduite ω/ωn
|H(jω
)| e
n dB
−1 0 1 0
50
100
150
Pulsation réduite ω/ωn
Arg
[F(jω
)] °
Résonnance en ω
r≠ ω
n pour ξ<0.7
ξ=0.7
ξ=0.26
ξ=.26
ξ=0.7
2 cas : ξ ≥ 1 ⇒ 2 constantes de temps reelles>0⇒ cf. 1 + jωτ avec τ1,2 = 1
ξωn±ωn
√ξ2−1
0 < ξ < 1 ⇒ zeros complexes conjuguesModule : 20 log10
∣∣1 + 2ξjω/ωn − ω2/ω2n
∣∣
= 20 log10
[√(1− ω2/ω2
n)2 + (2ξω/ωn)2]
≈ 0 si ω ¿ ωn
≈ 40 log10 (ω/ωn) si ω À ωn
Increment : 40 dB/decade si ω À ωn
12 dB/octave si ω À ωn
Phase : arg [H (jω)] = 180 si ω À ωn
Resonnance : en ωr = ωn
√1− 2ξ2 si ξ < 0.7
Facteur deresonnance : |F (jωr)| = Q = 2ξ
√1− ξ2
28
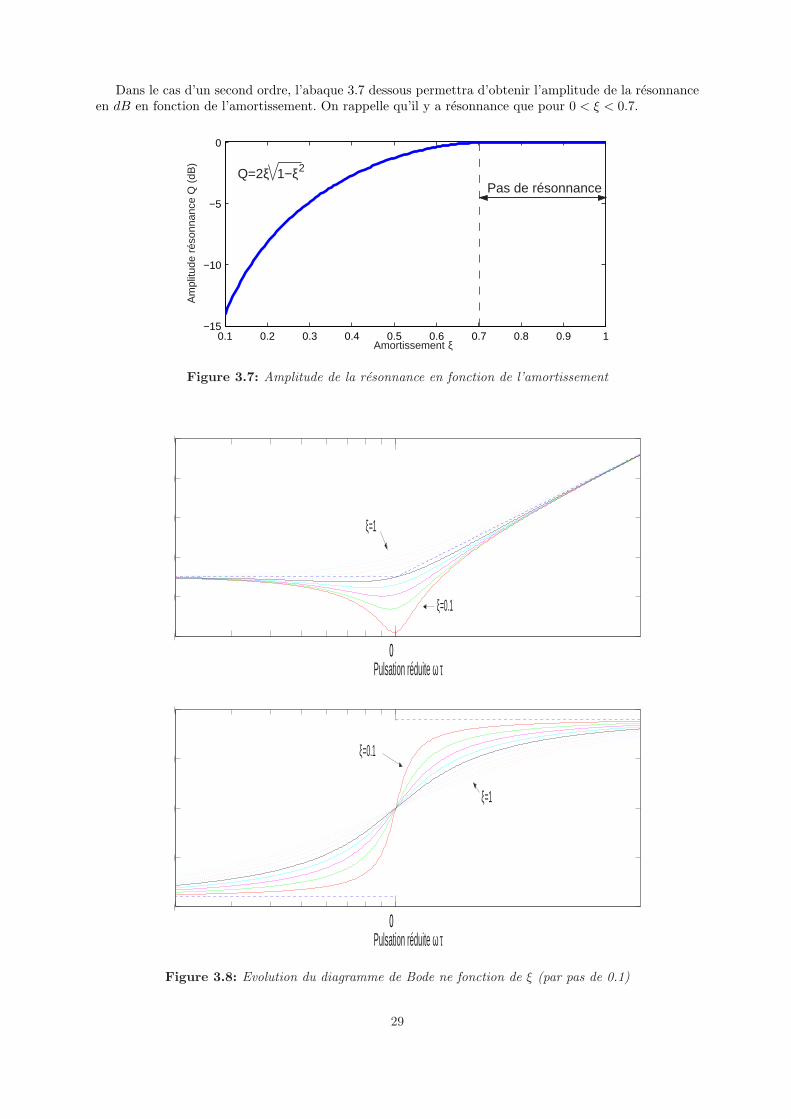
Dans le cas d’un second ordre, l’abaque 3.7 dessous permettra d’obtenir l’amplitude de la resonnanceen dB en fonction de l’amortissement. On rappelle qu’il y a resonnance que pour 0 < ξ < 0.7.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−15
−10
−5
0
Amortissement ξ
Am
plitu
de r
éson
nanc
e Q
(dB
)Pas de résonnance
Q=2ξ 1−ξ2
Figure 3.7: Amplitude de la resonnance en fonction de l’amortissement
00
10
20
30
40
0
Pulsation réduite ω τ
00
50
100
150
0
Pulsation réduite ω τ
ξ=0.1
ξ=1
ξ=0.1
ξ=1
Figure 3.8: Evolution du diagramme de Bode ne fonction de ξ (par pas de 0.1)
29

3.4 Identification dans le domaine frequentiel
Le trace du diagramme de Bode permettra notamment de determiner l’ordre du systeme (observationde la pente), de deduire les constantes de temps. Son utilisation est tout meme plus delicate que l’analysetemporelle (reponse a un echelon, ...).
3.5 Bilan
Dans ce chapitre, nous avons etudie la reponse des systemes de 1er et 2nd ordre a des excitations dutype impulsion, echelon, et sinus (reponse harmonique). Nous avons egalement donne un certain nombresd’abaques (courbes) reliant certaines grandeurs caracteristiques (temps de reponse a 5 %, ammortis-sement, ...). Ensuite, nous avons presente la demarche d’identification dont le but est de retrouver lesparametres du systeme en fonction de la reponse.
30


Chapitre 4
Principe de l’asservissement et de laregulation
Dans le premier chapitre, nous avons modelise les systemes mecaniques, thermiques, hydrauliques,mecaniques, ... par des systemes lineaires. Dans le deuxieme chapitre, nous avons etudie la reponse de cessystemes a differents type d’excitations (impulsion, echelon, rampe, ...).
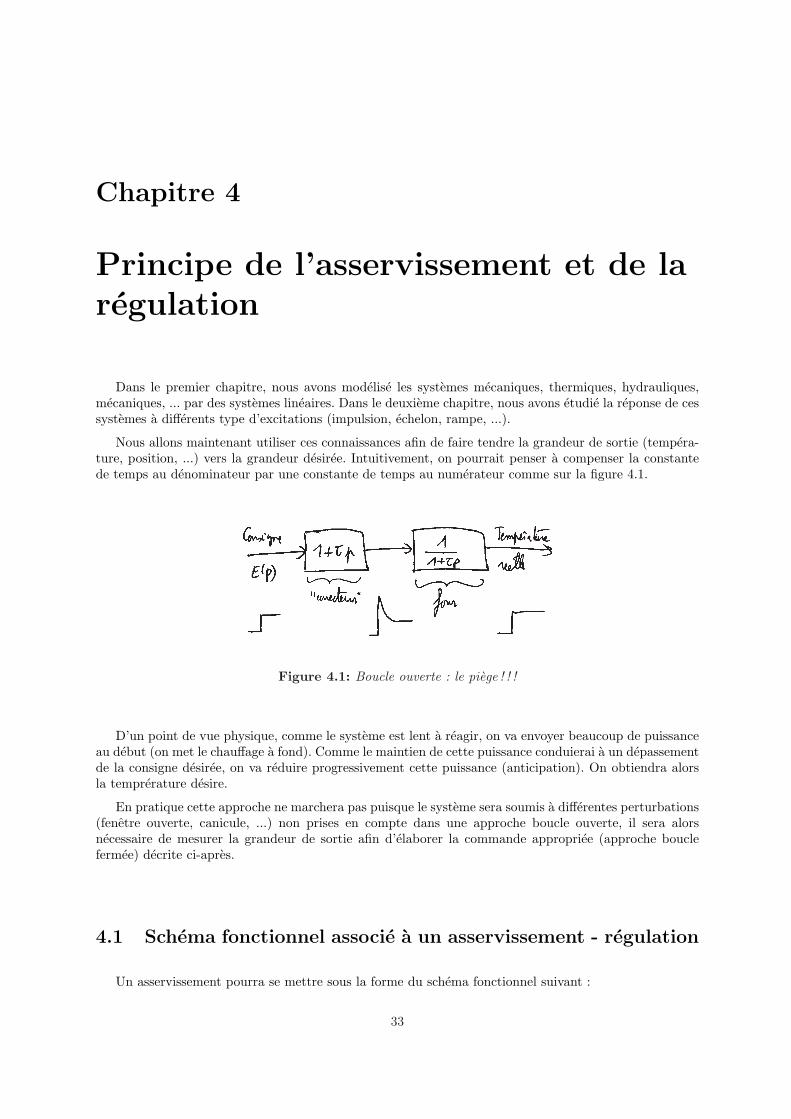
Nous allons maintenant utiliser ces connaissances afin de faire tendre la grandeur de sortie (tempera-ture, position, ...) vers la grandeur desiree. Intuitivement, on pourrait penser a compenser la constantede temps au denominateur par une constante de temps au numerateur comme sur la figure 4.1.
Figure 4.1: Boucle ouverte : le piege ! ! !
D’un point de vue physique, comme le systeme est lent a reagir, on va envoyer beaucoup de puissanceau debut (on met le chauffage a fond). Comme le maintien de cette puissance conduierai a un depassementde la consigne desiree, on va reduire progressivement cette puissance (anticipation). On obtiendra alorsla temprerature desire.
En pratique cette approche ne marchera pas puisque le systeme sera soumis a differentes perturbations(fenetre ouverte, canicule, ...) non prises en compte dans une approche boucle ouverte, il sera alorsnecessaire de mesurer la grandeur de sortie afin d’elaborer la commande appropriee (approche bouclefermee) decrite ci-apres.
4.1 Schema fonctionnel associe a un asservissement - regulation
Un asservissement pourra se mettre sous la forme du schema fonctionnel suivant :
33
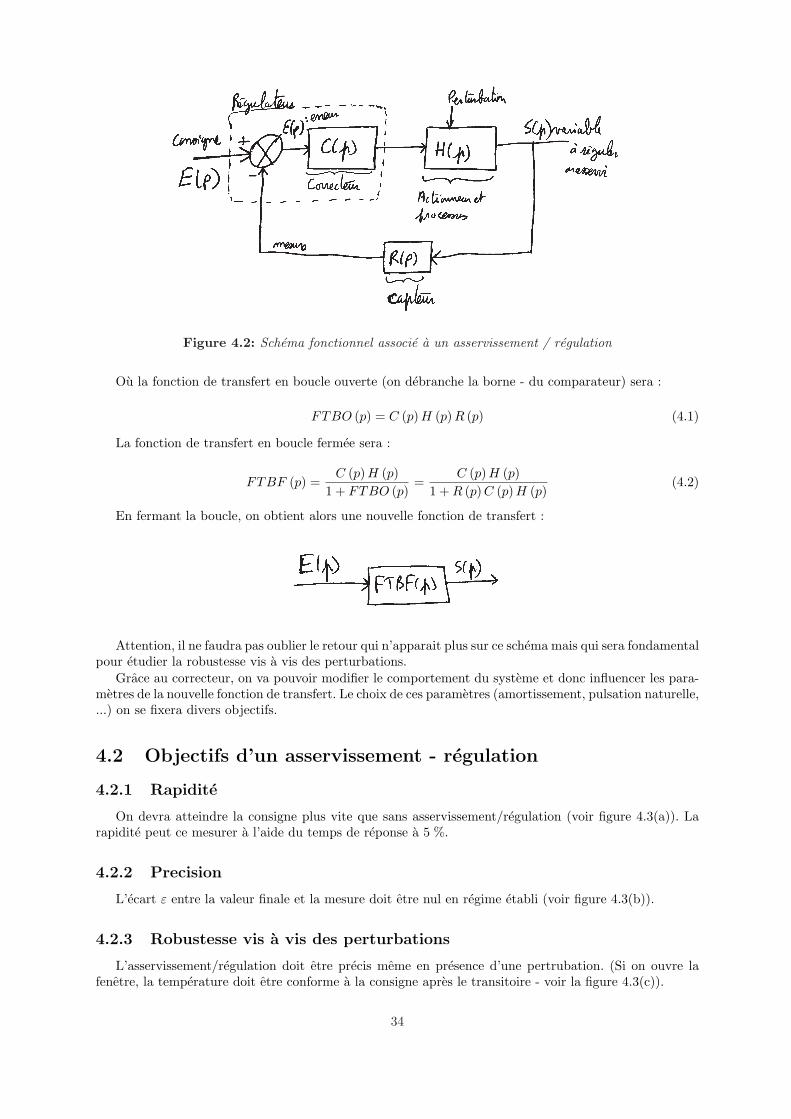
Figure 4.2: Schema fonctionnel associe a un asservissement / regulation
Ou la fonction de transfert en boucle ouverte (on debranche la borne - du comparateur) sera :
FTBO (p) = C (p)H (p) R (p) (4.1)
La fonction de transfert en boucle fermee sera :
FTBF (p) =C (p)H (p)
1 + FTBO (p)=
C (p) H (p)1 + R (p)C (p)H (p)
(4.2)
En fermant la boucle, on obtient alors une nouvelle fonction de transfert :
Attention, il ne faudra pas oublier le retour qui n’apparait plus sur ce schema mais qui sera fondamentalpour etudier la robustesse vis a vis des perturbations.
Grace au correcteur, on va pouvoir modifier le comportement du systeme et donc influencer les para-metres de la nouvelle fonction de transfert. Le choix de ces parametres (amortissement, pulsation naturelle,...) on se fixera divers objectifs.
4.2 Objectifs d’un asservissement - regulation
4.2.1 Rapidite
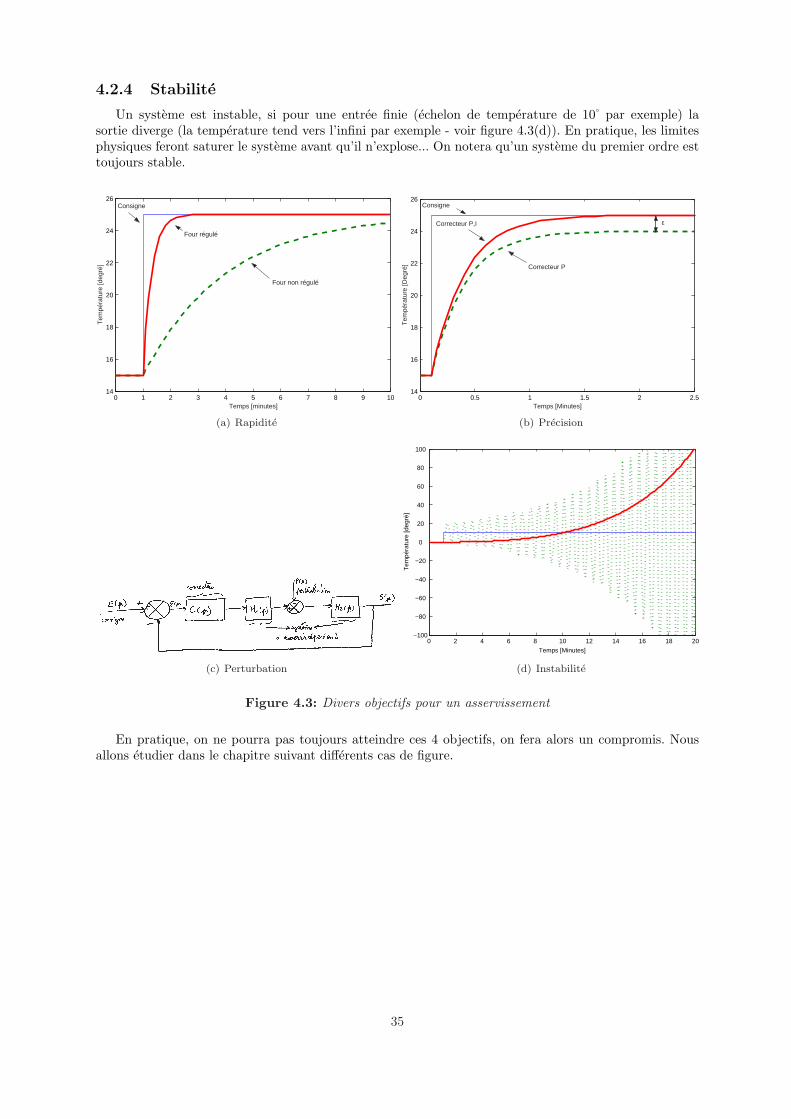
On devra atteindre la consigne plus vite que sans asservissement/regulation (voir figure 4.3(a)). Larapidite peut ce mesurer a l’aide du temps de reponse a 5 %.
4.2.2 Precision
L’ecart ε entre la valeur finale et la mesure doit etre nul en regime etabli (voir figure 4.3(b)).
4.2.3 Robustesse vis a vis des perturbations
L’asservissement/regulation doit etre precis meme en presence d’une pertrubation. (Si on ouvre lafenetre, la temperature doit etre conforme a la consigne apres le transitoire - voir la figure 4.3(c)).
34
4.2.4 Stabilite
Un systeme est instable, si pour une entree finie (echelon de temperature de 10 par exemple) lasortie diverge (la temperature tend vers l’infini par exemple - voir figure 4.3(d)). En pratique, les limitesphysiques feront saturer le systeme avant qu’il n’explose... On notera qu’un systeme du premier ordre esttoujours stable.
0 1 2 3 4 5 6 7 8 9 1014
16
18
20
22
24
26
Temps [minutes]
Tem
péra
ture
[deg
ré]
Consigne
Four non régulé
Four régulé
(a) Rapidite
0 0.5 1 1.5 2 2.514
16
18
20
22
24
26
Temps [Minutes]T
empé
ratu
re [D
egré
]
Consigne
Correcteur P,I
Correcteur P
ε
(b) Precision
(c) Perturbation
0 2 4 6 8 10 12 14 16 18 20−100
−80
−60
−40
−20
0
20
40
60
80
100
Temps [Minutes]
Tem
péra
ture
[deg
ré]
(d) Instabilite
Figure 4.3: Divers objectifs pour un asservissement
En pratique, on ne pourra pas toujours atteindre ces 4 objectifs, on fera alors un compromis. Nousallons etudier dans le chapitre suivant differents cas de figure.
35

Chapitre 5
Correcteurs P,I,D
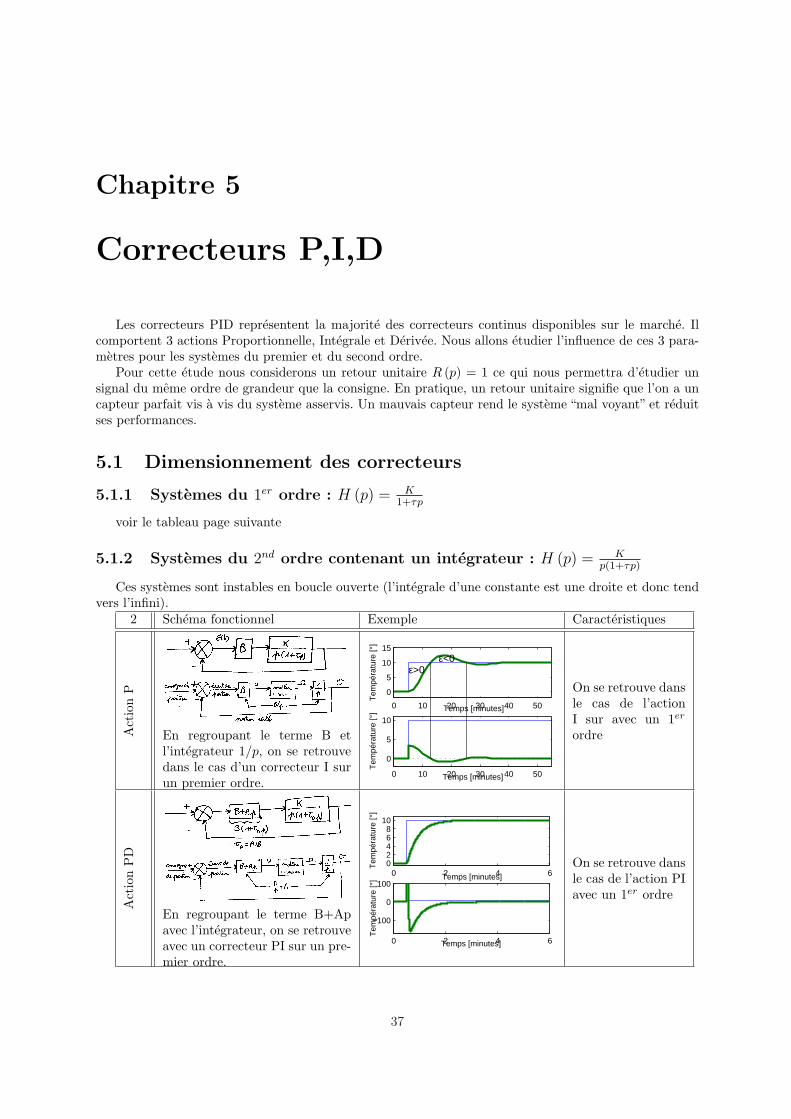
Les correcteurs PID representent la majorite des correcteurs continus disponibles sur le marche. Ilcomportent 3 actions Proportionnelle, Integrale et Derivee. Nous allons etudier l’influence de ces 3 para-metres pour les systemes du premier et du second ordre.
Pour cette etude nous considerons un retour unitaire R (p) = 1 ce qui nous permettra d’etudier unsignal du meme ordre de grandeur que la consigne. En pratique, un retour unitaire signifie que l’on a uncapteur parfait vis a vis du systeme asservis. Un mauvais capteur rend le systeme “mal voyant” et reduitses performances.
5.1 Dimensionnement des correcteurs
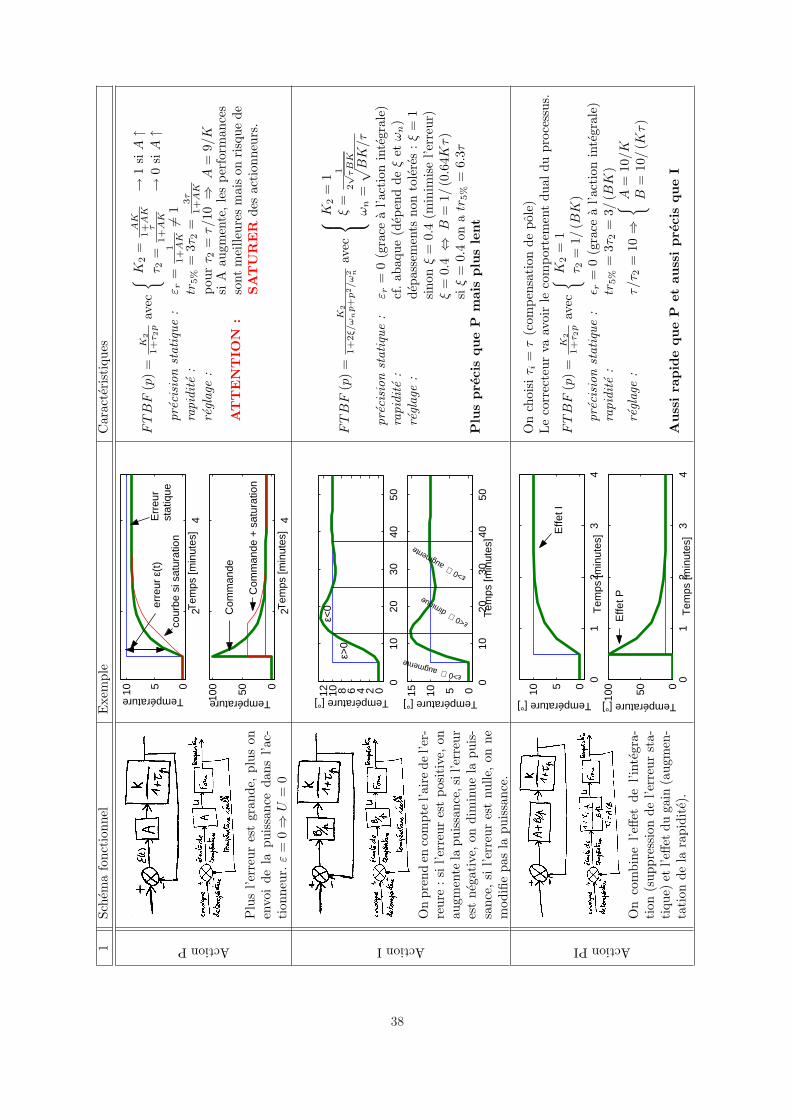
5.1.1 Systemes du 1er ordre : H (p) = K1+τp
voir le tableau page suivante
5.1.2 Systemes du 2nd ordre contenant un integrateur : H (p) = Kp(1+τp)
Ces systemes sont instables en boucle ouverte (l’integrale d’une constante est une droite et donc tendvers l’infini).
2 Schema fonctionnel Exemple Caracteristiques
Act
ion
P
En regroupant le terme B etl’integrateur 1/p, on se retrouvedans le cas d’un correcteur I surun premier ordre.
0 10 20 30 40 50
0
5
10
15
Temps [minutes]
Tem
péra
ture
[°]
0 10 20 30 40 50
0
5
10
Temps [minutes]
Tem
péra
ture
[°]
ε>0 ε<0
On se retrouve dansle cas de l’actionI sur avec un 1er
ordre
Act
ion
PD
En regroupant le terme B+Apavec l’integrateur, on se retrouveavec un correcteur PI sur un pre-mier ordre.
0 2 4 602468
10
Temps [minutes]
Tem
péra
ture
[°]
0 2 4 6
−100
0
100
Temps [minutes]
Tem
péra
ture
[°]
On se retrouve dansle cas de l’action PIavec un 1er ordre
37
1Sc
hem
afo
nction
nel
Exe
mpl
eC
arac
teri
stiq
ues
ActionP
Plu
sl’e
rreu
res
tgr
ande
,pl
uson
envo
ide
lapu
issa
nce
dans
l’ac-
tion
neur
.ε
=0⇒
U=
0
24
0510
Tem
ps [m
inut
es]
Température
24
050100
Tem
ps [m
inut
es]
Température
Err
eur
stat
ique
Com
man
de
erre
ur ε
(t)
Com
man
de +
sat
urat
ion
cour
be s
i sat
urat
ion
FT
BF
(p)
=K
21+
τ2p
avec
K
2=
AK
1+
AK
→1
siA↑
τ 2=
τ1+
AK
→0
siA↑
prec
isio
nst
atiq
ue:
ε r=
11+
AK6=
1ra
pidi
te:
tr5%
=3τ
2=
3τ
1+
AK
reglag
e:
pour
τ 2=
τ/10
⇒A
=9/
K
AT
TEN
TIO
N:
siA
augm
ente
,le
spe
rfor
man
ces
sont
mei
lleur
esm
ais
onri
sque
deSA
TU
RER
des
action
neur
s.
ActionI
On
pren
den
com
pte
l’air
ede
l’er-
reur
e:s
il’e
rreu
res
tpo
sitive
,on
augm
ente
lapu
issa
nce,
sil’e
rreu
res
tne
gative
,on
dim
inue
lapu
is-
sanc
e,si
l’err
eur
est
nulle
,on
nem
odifi
epa
sla
puis
sanc
e.
0 10
2030
4050
0 2 4 6 8 1012 Température [°]
0 10
2030
4050
0 5 1015
Tem
ps [m
inut
es]
Température [°]
ε>0
ε<0
ε<0 ⇒ diminue
ε>0 ⇒ augmente
ε>0 ⇒ augmente
FT
BF
(p)
=K
21+
2ξ/ω
np+
p2/ω
2 nav
ec
K
2=
1ξ
=1
2√
τB
K
ωn
=√
BK
/τ
prec
isio
nst
atiq
ue:
ε r=
0(g
race
al’a
ctio
nin
tegr
ale)
rapi
dite
:cf
.aba
que
(dep
end
deξ
etω
n)
reglag
e:
depa
ssem
ents
non
tole
res
:ξ
=1
sino
nξ
=0.
4(m
inim
ise
l’err
eur)
ξ=
0.4⇔
B=
1/(0
.64K
τ)
siξ
=0.
4on
atr
5%
=6.
3τP
lus
pre
cis
que
Pm
ais
plu
sle
nt
ActionPI
On
com
bine
l’effe
tde
l’int
egra
-tion
(sup
pres
sion
del’e
rreu
rst
a-tiqu
e)et
l’effe
tdu
gain
(aug
men
-ta
tion
dela
rapi
dite
).
01
23
40510
Tem
ps [m
inut
es]
Température [°]
01
23
4050100
Tem
ps [m
inut
es]
Température [°]
Effe
t P
Effe
t I
On
choi
siτ i
=τ
(com
pens
atio
nde
pole
)Le
corr
ecte
urva
avoi
rle
com
port
emen
tdu
aldu
proc
essu
s.
FT
BF
(p)
=K
21+
τ2p
avec
K
2=
1τ 2
=1/
(BK
)pr
ecis
ion
stat
ique
:ε r
=0
(gra
cea
l’act
ion
inte
gral
e)ra
pidi
te:
tr5%
=3τ
2=
3/(B
K)
regl
age
:τ/τ 2
=10⇒
A
=10
/KB
=10
/(K
τ)
Auss
ira
pid
eque
Pet
auss
ipre
cis
que
I
38

5.1.3 Systemes du 2nd ordre : H (p) = K(1+τ1p)(1+τ2p)
2 Schema fonctionnel CaracteristiquesA
ctio
nP
FTBF (p) = K21+2ξ/ωnp+p2/ω2
navec
K2 = AK1+AK
ξ = τ1+τ2√τ1τ2
· 12√
1+AK
ωn =√
1+AKτ1τ2
precision statique : εr = 11+AK 6= 1
rapidite : cf. abaque (depend de ξ et ωn)reglage : ξ = 0.4 ⇒ A = 1
K
[(τ1+τ2)
2
0.64τ1τ2− 1
]
Si on fixe ξ, on impose tr5%, donc :On ralentit le systeme, et on n’est pas precis.
Act
ion
PI On choisit τi = τ2 (plus grande constante de temps)
On a alors un systeme du type : KB
1p(1+τ1p)
⇒ On se retrouve dans le cas d’une action I sur un 1er
ordre.
Act
ion
PID
On choisi τi = τ1 et τd = τ2 (compensation de pole)OU on choisi ξ1 = ξ2 et ωn1 = ωn2
On a alors un systeme du type BKp
⇒ On se retrouve dans le cas d’une action PI sur un 1er
ordre avec correcteur PI.
5.1.4 Bilan
– La presence d’une integration dans le correcteur ou dans le systeme permet de supprimer l’erreurstatique pour un echelon.
– L’integrateur agit en basse frequence : il ne va pas rendre le systeme plus rapide.– Le correcteur proportionnel permet d’augmenter la rapidite pour un premier ordre, mais attention
a la saturation.– Pour un systeme de second ordre, il faudra ajouter une action derivation pour augmenter la vitesse
du systeme. On utilisera neanmoins l’action derivation avec parcimonie car elle est sensible au bruit.– On cherchera a obtenir (avec un preference pour l’ordre 1) soit :
– FTBF (p) = K21+τ2p avec K2 = 1 et τ2 10 fois plus rapide (par exemple).
– FTBF (p) = K21+2ξp/ωn+p2/ω2
navec K2 = 1, ξ = 0.4 et un meilleur temps de reponse (10 fois plus
rapide par exemple).Jusqu’a present, nous avons considere une consigne du type echelon souvent utilise en regulation. Dans
le cas d’un asservissement, on utilisera egalement des rampe (stylo d’une table tracante,...). Dans ce cas,il faudra introduire 1 integrateur supplementaire dans la boucle afin d’avoir une erreur de trainage nulle.Le tableau ci-dessous indique la precision du systeme en fonction du nombre d’integrateurs.
Nombre d’integrations Echelon Rampe Parabolen = 0 ε = E
1+K ε →∞ ε →∞n = 1 ε = 0 ε = E
K ε →∞n = 2 ε = 0 ε = 0 ε = E
K
Tab. 5.1: Precision pour differentes fonctions test
Par exemple, pour etre precis avec en entree de type rampe, il faudra utiliser deux integrateurs.
5.2 Comportement face aux perturbations
Le principal interet d’une regulation ou d’un asservissement est la prise en compte des perturbations :si on ouvre une fenetre, la capteur mesurera une temperature differente et le systeme agira en consequence.Nous allons maintenant etudier l’effet de ses perturbations.
39
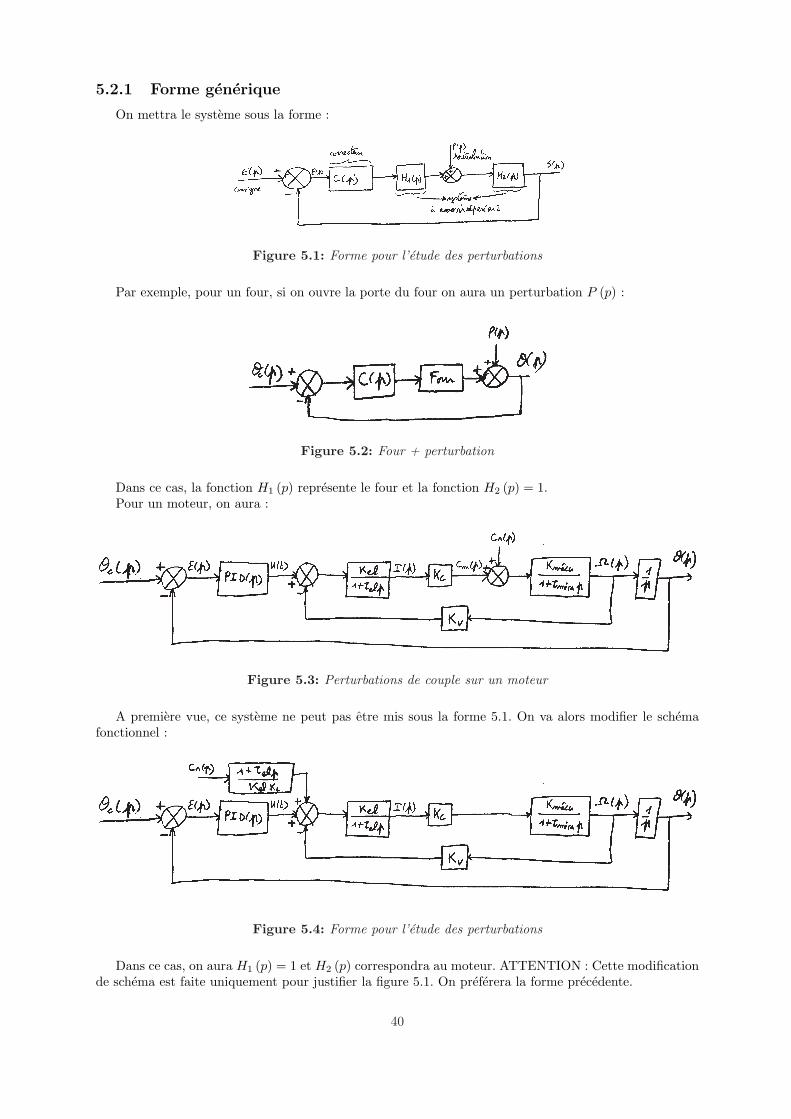
5.2.1 Forme generique
On mettra le systeme sous la forme :
Figure 5.1: Forme pour l’etude des perturbations
Par exemple, pour un four, si on ouvre la porte du four on aura un perturbation P (p) :
Figure 5.2: Four + perturbation
Dans ce cas, la fonction H1 (p) represente le four et la fonction H2 (p) = 1.Pour un moteur, on aura :
Figure 5.3: Perturbations de couple sur un moteur
A premiere vue, ce systeme ne peut pas etre mis sous la forme 5.1. On va alors modifier le schemafonctionnel :
Figure 5.4: Forme pour l’etude des perturbations
Dans ce cas, on aura H1 (p) = 1 et H2 (p) correspondra au moteur. ATTENTION : Cette modificationde schema est faite uniquement pour justifier la figure 5.1. On preferera la forme precedente.
40
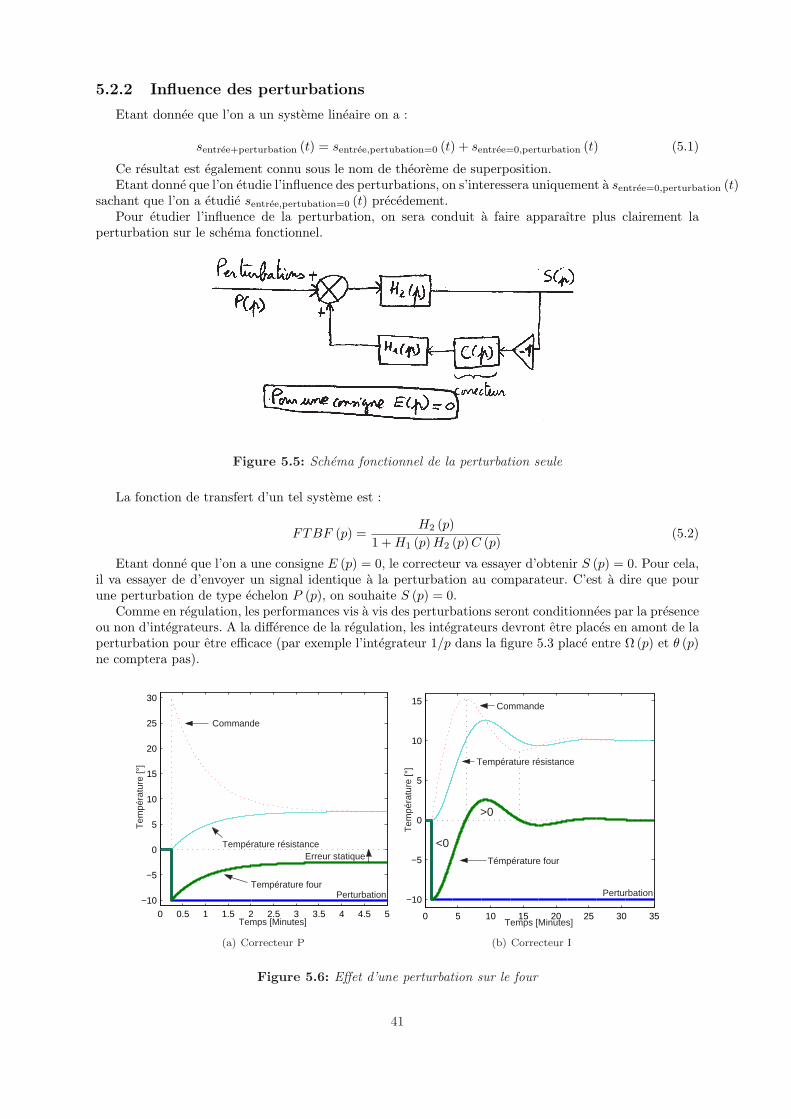
5.2.2 Influence des perturbations
Etant donnee que l’on a un systeme lineaire on a :
sentree+perturbation (t) = sentree,pertubation=0 (t) + sentree=0,perturbation (t) (5.1)
Ce resultat est egalement connu sous le nom de theoreme de superposition.Etant donne que l’on etudie l’influence des perturbations, on s’interessera uniquement a sentree=0,perturbation (t)
sachant que l’on a etudie sentree,pertubation=0 (t) precedement.Pour etudier l’influence de la perturbation, on sera conduit a faire apparaıtre plus clairement la
perturbation sur le schema fonctionnel.
Figure 5.5: Schema fonctionnel de la perturbation seule
La fonction de transfert d’un tel systeme est :
FTBF (p) =H2 (p)
1 + H1 (p) H2 (p)C (p)(5.2)
Etant donne que l’on a une consigne E (p) = 0, le correcteur va essayer d’obtenir S (p) = 0. Pour cela,il va essayer de d’envoyer un signal identique a la perturbation au comparateur. C’est a dire que pourune perturbation de type echelon P (p), on souhaite S (p) = 0.
Comme en regulation, les performances vis a vis des perturbations seront conditionnees par la presenceou non d’integrateurs. A la difference de la regulation, les integrateurs devront etre places en amont de laperturbation pour etre efficace (par exemple l’integrateur 1/p dans la figure 5.3 place entre Ω (p) et θ (p)ne comptera pas).
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−10
−5
0
5
10
15
20
25
30
Temps [Minutes]
Tem
péra
ture
[°]
Commande
Température résistance
Perturbation Température four
Erreur statique
(a) Correcteur P
0 5 10 15 20 25 30 35
−10
−5
0
5
10
15
Temps [Minutes]
Tem
péra
ture
[°]
Commande
Température résistance
Témpérature four
Perturbation
<0
>0
(b) Correcteur I
Figure 5.6: Effet d’une perturbation sur le four
41
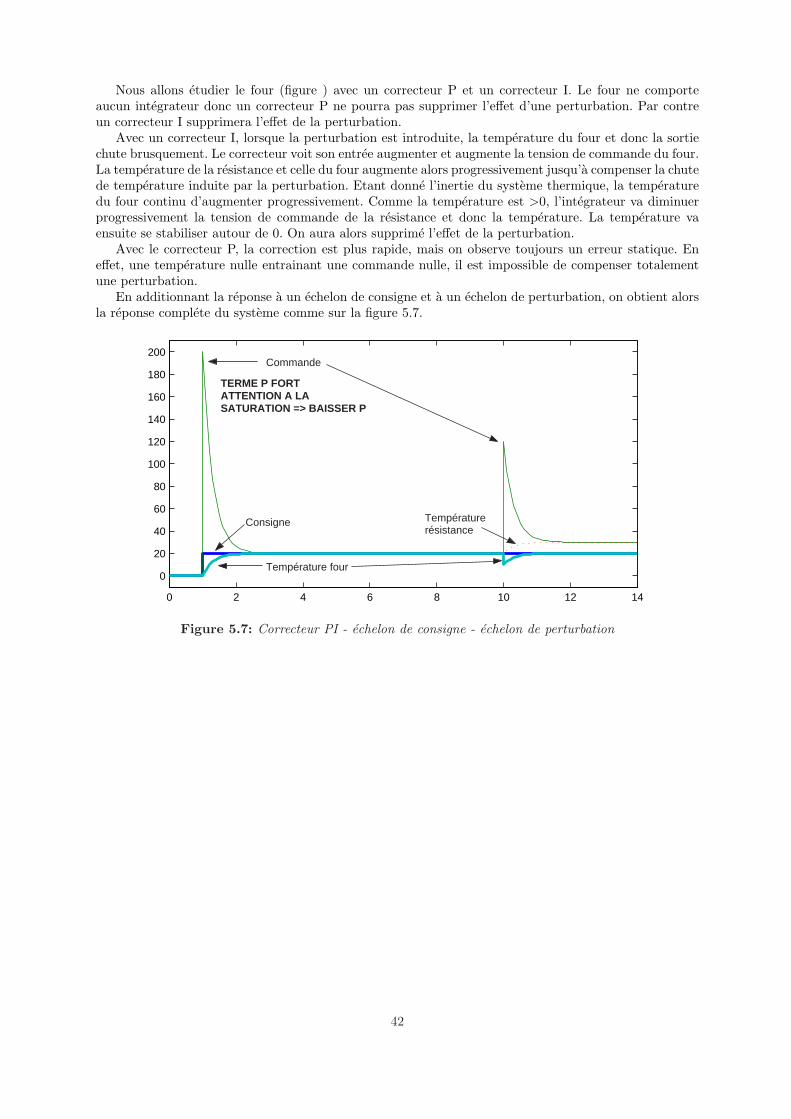
Nous allons etudier le four (figure ) avec un correcteur P et un correcteur I. Le four ne comporteaucun integrateur donc un correcteur P ne pourra pas supprimer l’effet d’une perturbation. Par contreun correcteur I supprimera l’effet de la perturbation.
Avec un correcteur I, lorsque la perturbation est introduite, la temperature du four et donc la sortiechute brusquement. Le correcteur voit son entree augmenter et augmente la tension de commande du four.La temperature de la resistance et celle du four augmente alors progressivement jusqu’a compenser la chutede temperature induite par la perturbation. Etant donne l’inertie du systeme thermique, la temperaturedu four continu d’augmenter progressivement. Comme la temperature est >0, l’integrateur va diminuerprogressivement la tension de commande de la resistance et donc la temperature. La temperature vaensuite se stabiliser autour de 0. On aura alors supprime l’effet de la perturbation.
Avec le correcteur P, la correction est plus rapide, mais on observe toujours un erreur statique. Eneffet, une temperature nulle entrainant une commande nulle, il est impossible de compenser totalementune perturbation.
En additionnant la reponse a un echelon de consigne et a un echelon de perturbation, on obtient alorsla reponse complete du systeme comme sur la figure 5.7.
0 2 4 6 8 10 12 14
0
20
40
60
80
100
120
140
160
180
200Commande
TERME P FORTATTENTION A LASATURATION => BAISSER P
Température four
Consigne Températurerésistance
Figure 5.7: Correcteur PI - echelon de consigne - echelon de perturbation
42


Chapitre 6
Technique de correction desperturbations
45

Chapitre 7
Etude de cas
47