Embed Size (px)
Citation preview
Livre d’exercicesTP 1421
Avec CD-ROM
Festo Didactic
571857 fr
Bases de la techniqued’entraînement par servomoteur

Référence : 571857
Version : 04/2010
Auteurs : Frank Ebel, Markus Pany
Graphiques : Markus Pany
Mise en page: 09/2011, Frank Ebel, Susanne Durz
© Festo Didactic GmbH & Co. KG, 73770 Denkendorf, Allemand, 2013
Internet: www.festo-didactic.com
E-Mail: [email protected]
L'acheteur obtient un droit d'utilisation simple, non exclusif, non limité dans le temps et restreint
géographiquement au site /siège de l'acheteur comme suit.
L'acheteur est autorisé à utiliser les contenus de l'ouvrage pour la formation continue du personnel du site
et à utiliser aussi des éléments du contenu pour la réalisation de son propre matériel de formation continue
du personnel de son site, à condition d'en mentionner la source, et à les dupliquer pour la formation
continue sur le site. Pour les écoles/universités et centres de formation, ce droit d'utilisation englobe
l'utilisation durant les cours par les élèves, stagiaires et étudiants du site.
En est exlcu dans tous les cas le droit de publication ainsi que de chargement et d'utilisation sur intranet ou
Internet ou sur plateformes LMS et bases de données telles que Moodle qui permettent à un grand nombre
d'utilisateurs d'y accéder en dehors du site de l'acheteur.
Tous les autres droits de transmission, de reproduction, de duplication, d'édition, de traduction, de
microfilmage ainsi que le transfert, le stockage et le traitement intégral ou partiel sur des systèmes
électroniques présupposent l'accord préalable de Festo Didactic GmbH & Co. KG.
© Festo Didactic GmbH & Co. KG 571857 III
Table des matières
Utilisation conforme ______________________________________________________________________ IV
Avant-propos ____________________________________________________________________________ V
Introduction ____________________________________________________________________________ VII
Instructions et consignes de sécurité _______________________________________________________ VIII
Ensemble de formation « Bases de la technique d'entraînement par servomoteur » (TP 1421) _________ IX
Objectifs pédagogiques ____________________________________________________________________ X
Correspondance entre objectifs pédagogiques et travaux pratiques ________________________________ XI
Jeu d'équipement « Bases de la technique d'entraînement par servomoteur » (TP 1421) ______________ XII
Correspondance entre composants et travaux pratiques ________________________________________ XII
Notes à l'intention de l'enseignant ou du formateur ____________________________________________ XIII
Structure des travaux pratiques ____________________________________________________________ XIV
Contenu du CD-ROM _____________________________________________________________________ XV
Travaux pratiques et corrigés
TP 1 : Architecture d'un système à servomoteur _________________________________________________1
TP 2 : Configuration et mise en service d'un système à servomoteur _________________________________7
TP 3 : Régulation de vitesse d'un système à servomoteur _______________________________________ 19
TP 4 : Mise en référence et positionnement dans un système à servomoteur ________________________ 43
TP 5 : Positionnement et contrôle de séquence ________________________________________________ 57
TP 6 : Programme de déplacement avec enchaînement de blocs __________________________________ 73
Travaux pratiques et fiches de travail
TP 1 : Architecture d'un système à servomoteur _________________________________________________1
TP 2 : Configuration et mise en service d'un système à servomoteur _________________________________7
TP 3 : Régulation de vitesse d'un système à servomoteur _______________________________________ 19
TP 4 : Mise en référence et positionnement dans un système à servomoteur ________________________ 43
TP 5 : Positionnement et contrôle de séquence ________________________________________________ 57
TP 6 : Programme de déplacement avec enchaînement de blocs __________________________________ 73
IV © Festo Didactic GmbH & Co. KG 571857
Utilisation conforme
L'ensemble de formation « Bases de la technique d'entraînement par servomoteur » ne doit s'utiliser que :
• pour l'usage auquel il est destiné, c'est-à-dire dans le cadre de l'enseignement et de la formation, et
• en parfait état sur le plan de la sécurité.
Les composants de l'ensemble de formation sont construits conformément à l’état de l’art et aux règles
techniques reconnues en matière de sécurité. Leur utilisation peut néanmoins mettre en danger la vie et la
santé de l’utilisateur ou de tiers ainsi qu'affecter l'intégrité des composants eux-mêmes.
Le système de formation de Festo Didactic est exclusivement destiné à la formation initiale et continue dans
le domaine de l’automatisation et de la technique. Il incombe à l’établissement de formation et/ou aux
formateurs de faire respecter par les étudiants les consignes de sécurité décrites dans le présent manuel de
travaux pratiques.
Festo Didactic décline par conséquent toute responsabilité quant aux dommages causés aux étudiants, à
l’établissement de formation et/ou à des tiers du fait de l'utilisation de ce jeu d’équipement en dehors du
contexte d’une pure formation, à moins que ces dommages ne soient imputables à une faute intentionnelle
ou à une négligence grossière de Festo Didactic.

© Festo Didactic GmbH & Co. KG 571857 V
Avant-propos
Le système de formation « Automatisation et Technique » de Festo Didactic part de différents niveaux
d’accès à la formation et objectifs professionnels. C’est dans cette optique qu'est structuré le système de
formation :
• ensembles de formation axés sur les technologies ;
• mécatronique et automatisation d'usine ;
• automatisation de process et technique de régulation ;
• Robotino® – apprentissage et travaux de recherche avec des robots mobiles ;
• usines-écoles hybrides.
Les ensembles de formation technologique se penchent sur les technologies suivantes : pneumatique,
électropneumatique, hydraulique, électrohydraulique, hydraulique proportionnelle, automates
programmables, capteurs, électricité et actionneurs électriques.
La structure modulaire du système de formation permet de réaliser des applications allant au-delà des
limites des différents ensembles. Par exemple, il est possible de commander par API des actionneurs
pneumatiques, hydrauliques et/ou électriques.
VI © Festo Didactic GmbH & Co. KG 571857
Tous les ensembles de formation ont une structure identique :
• Matériel
• Didacticiel
• Logiciel
• Séminaires.
Le matériel est constitué de composants industriels et de systèmes adaptés à une approche didactique.
L’approche didactique et méthodologique des supports est calquée sur la composition du matériel de
formation. Les supports comprennent :
• des manuels de cours (avec exercices et exemples),
• des manuels de travaux pratiques (avec compléments et corrigés),
• des recueils de travaux pratiques (avec informations complémentaires),
• des jeux de transparents et vidéos (permettant de rendre l’enseignement plus vivant).
Les supports destinés aux enseignants et aux étudiants sont disponibles en plusieurs langues. Ils sont
conçus pour l’enseignement, mais se prêtent aussi à l’autoformation.
Le logiciel fourni comprend des didacticiels ainsi que des programmes de simulation, de visualisation, de
configuration, de conception et de programmation.
Un large éventail de séminaires consacrés aux contenus des ensembles de formation complète l’offre de
formation initiale et continue.
Vous avez des suggestions ou des critiques à propos de ce manuel ?
N'hésitez pas à nous en faire part par courriel à : [email protected]
Les auteurs et Festo Didactic se feront un plaisir de tenir compte de vos remarques.

© Festo Didactic GmbH & Co. KG 571857 VII
Introduction
Le présent manuel de travaux pratiques fait partie du système de formation « Automatisation et Technique »
de la société Festo Didactic GmbH & Co. KG. Ce système constitue une solide base de formation initiale et
continue axée sur la pratique. L'ensemble de formation TP 1421 aborde les bases de la technique
d'entraînement par servomoteur.
Il développe plus particulièrement les aspects architecture, fonctionnement, raccordement, domaines
d'utilisation et commande d'un système à servomoteur en fonction des besoins d'une application.
La réalisation des montages suppose de disposer d'un poste de travail bien stable doté d'une plaque
profilée Festo Didactic, d'un bloc d'alimentation secteur protégé contre les courts-circuits à tension de
sortie de 24 V DC et d'un bloc d'alimentation secteur protégé contre les courts-circuits à tension de sortie de
230 V AC.
Le jeu d’équipement TP 1421 permet de réaliser les montages des TP 1 à 5. Pour le TP 6, il vous faudra en
outre un boîtier de simulation d'E/S et un câble d'E/S SysLink. Ces deux composants ne sont pas compris
dans le jeu d'équipement.
Des fiches techniques des différents composants (capteurs, actionneurs, moteurs, contrôleurs, etc.) sont en
outre disponibles.
VIII © Festo Didactic GmbH & Co. KG 571857
Instructions et consignes de sécurité
Généralités • Les étudiants ne doivent travailler sur les montages que sous la surveillance d’une formatrice ou d’un
formateur.
• Respectez les indications données dans les fiches techniques des différents composants, en particulier
toutes les consignes de sécurité !
• La formation ne doit être à l'origine d'aucune panne susceptible d'affecter la sécurité ; les pannes
éventuelles doivent être immédiatement éliminées.
Partie mécanique • Montez solidement tous les composants sur la plaque profilée.
• Notez les indications concernant l'implantation des composants.
Partie électrique • Le contrôleur de servomoteur fonctionne sous une tension d'alimentation de 95 – 255 V AC. Le
contrôleur doit être raccordé au secteur de telle manière qu'il puisse en être isolé par des moyens
adéquats (tels qu'interrupteur général, contacteur, interrupteur de puissance, etc.).
• N'utilisez dans les circuits de commande que de très basses tensions de 24 V DC maximum.
• N’effectuez les branchements et débranchements électriques qu’en l’absence de tension !
• N’utilisez pour les branchements électriques que des câbles de liaison dotés de connecteurs de
sécurité.
• Pour débrancher les câbles de liaison, tirez sur les connecteurs, pas sur les câbles.
Fixations Les plaques supports des appareils sont dotées de la variante de fixation A, B ou C :
• Variante A, système à encliquetage �Appareils légers ne supportant pas de charge (tels que
distributeurs et capteurs). Enclipsez simplement les appareils dans la rainure de la plaque profilée.
Désolidarisation des appareils par actionnement du levier bleu.
• Variante B, système à rotation�Appareils pouvant supporter des charges moyennes (p. ex. vérins
pneumatiques). Ces appareils se fixent sur la plaque profilée par vis à tête rectangulaire. La fixation ou
désolidarisation s’opère à l'aide de l'écrou-poignée bleu.
• Variante C, système à vissage�Pour appareils supportant de lourdes charges ou rarement désolidarisés
de la plaque profilée (tels que distributeur de mise en circuit avec filtre-manodétendeur). Les appareils
se fixent par vis à tête cylindrique et écrous rectangulaires.
© Festo Didactic GmbH & Co. KG 571857 IX
Ensemble de formation « Bases de la technique d'entraînement par servomoteur » (TP 1421)
L'ensemble de formation TP 1421 se compose d’une multitude de moyens de formation. Cet ensemble est
consacré aux servomoteurs. Certains composants de l'ensemble de formation TP 1421 peuvent également
faire partie d’autres ensembles.
Composants importants du TP 1421 • Poste de travail bien stable avec plaque profilée Festo Didactic
• Jeux d’équipement ou composants discrets (tels que capteurs, actionneurs, moteurs, contrôleurs)
Supports Les supports associés à l'ensemble de formation TP 1421 comprennent un manuel de travaux pratiques. Le
manuel de travaux pratiques comportent les fiches de chacun des TP, le corrigé de chaque fiche de travail et
un CD-ROM. Il comporte un jeu de fiches de TP et de fiches de travail prêtes à l'emploi.
Des fiches techniques des composants sont fournies sur le CD-ROM.
L'ensemble de formation TP 1421 dispose du logiciel Festo Configuration Tool (FCT). Le logiciel FCT
configure les fonctions nécessaires aux actionneurs électriques. La fonction d'entraînement est réalisée par
la chaîne fonctionnelle contrôleur-moteur-axe. Le logiciel harmonise ces composants.
Nota
Le logiciel FCT est uniquement disponible en allemand et en anglais.
Vous trouverez d’autres moyens de formation dans nos catalogues et sur Internet. Le système de formation
« Automatisation et Technique » fait régulièrement l’objet de mises à jour et extensions. Les jeux de
transparents, films, CD-ROM, DVD et didacticiels ainsi que les autres ressources sont proposés en plusieurs
langues.
X © Festo Didactic GmbH & Co. KG 571857
Objectifs pédagogiques
Servomoteurs
• Connaître l'architecture d'un système à servomoteur et savoir le monter
• Connaître les bases des techniques de raccordement et de montage des composants utilisés
• Savoir mettre correctement en service un système à servomoteur
• Connaître les bases de la configuration et du paramétrage d'un système à servomoteur à l'aide de
l'outil de configuration Festo (FCT)
• Savoir régler et réguler la vitesse d'un système à servomoteur
• Connaître les possibilités de régler différentes accélérations et décélérations à l'aide du logiciel FCT
• Connaître les bases de la configuration et de l'enregistrement de mesures à l'aide du logiciel FCT
• Savoir exécuter la mise en référence dans un système à servomoteur
• Savoir régler des positions et blocs de positionnement ainsi que choisir des positions
• Savoir commander les opérations de positionnement dans un système à servomoteur à l'aide du
contrôle de séquence
• Savoir vérifier des blocs de positionnement à l'aide du logiciel FCT dans le cadre d'un cycle de test
• Connaître les différents modes de fonctionnement d'un contrôleur de moteur
• Savoir créer et gérer un programme de déplacement avec enchaînement de blocs de positionnement
• Savoir acquérir des positions par apprentissage (« teaching »)
© Festo Didactic GmbH & Co. KG 571857 XI
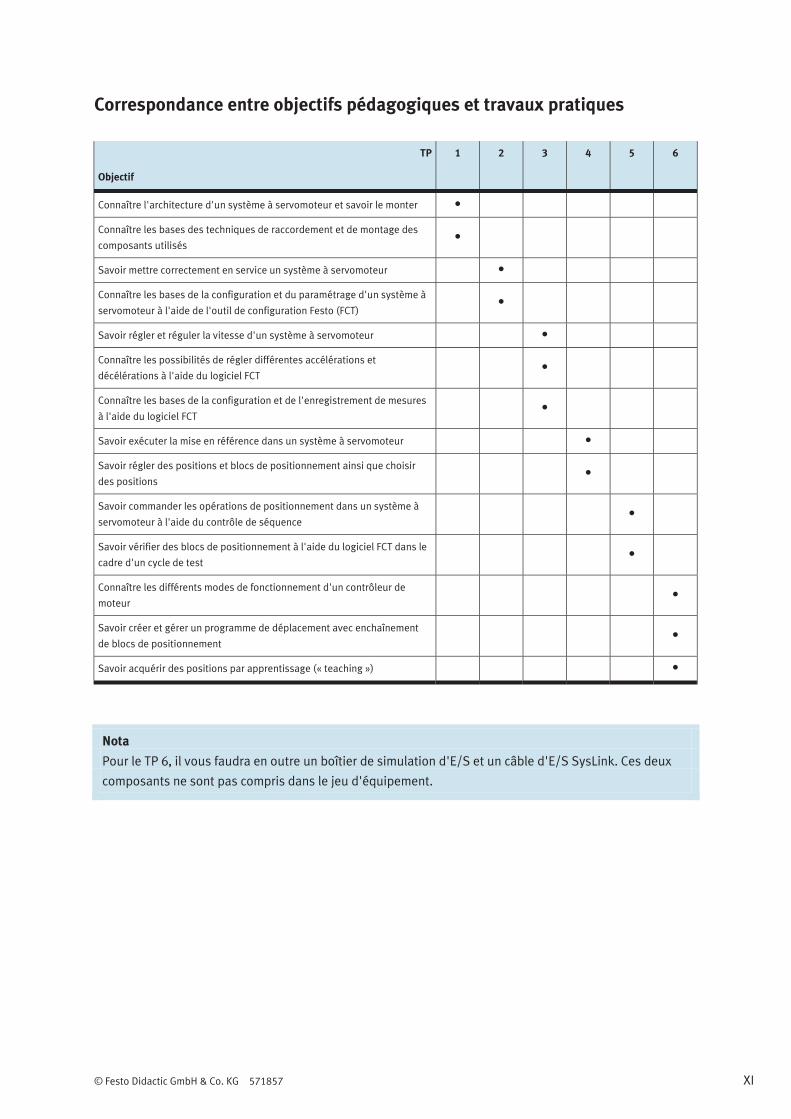
Correspondance entre objectifs pédagogiques et travaux pratiques
TP 1 2 3 4 5 6
Objectif
Connaître l'architecture d'un système à servomoteur et savoir le monter •
Connaître les bases des techniques de raccordement et de montage des
composants utilisés •
Savoir mettre correctement en service un système à servomoteur •
Connaître les bases de la configuration et du paramétrage d'un système à
servomoteur à l'aide de l'outil de configuration Festo (FCT) •
Savoir régler et réguler la vitesse d'un système à servomoteur •
Connaître les possibilités de régler différentes accélérations et
décélérations à l'aide du logiciel FCT •
Connaître les bases de la configuration et de l'enregistrement de mesures
à l'aide du logiciel FCT •
Savoir exécuter la mise en référence dans un système à servomoteur •
Savoir régler des positions et blocs de positionnement ainsi que choisir
des positions •
Savoir commander les opérations de positionnement dans un système à
servomoteur à l'aide du contrôle de séquence •
Savoir vérifier des blocs de positionnement à l'aide du logiciel FCT dans le
cadre d'un cycle de test •
Connaître les différents modes de fonctionnement d'un contrôleur de
moteur •
Savoir créer et gérer un programme de déplacement avec enchaînement
de blocs de positionnement •
Savoir acquérir des positions par apprentissage (« teaching ») •
Nota
Pour le TP 6, il vous faudra en outre un boîtier de simulation d'E/S et un câble d'E/S SysLink. Ces deux
composants ne sont pas compris dans le jeu d'équipement.
XII © Festo Didactic GmbH & Co. KG 571857
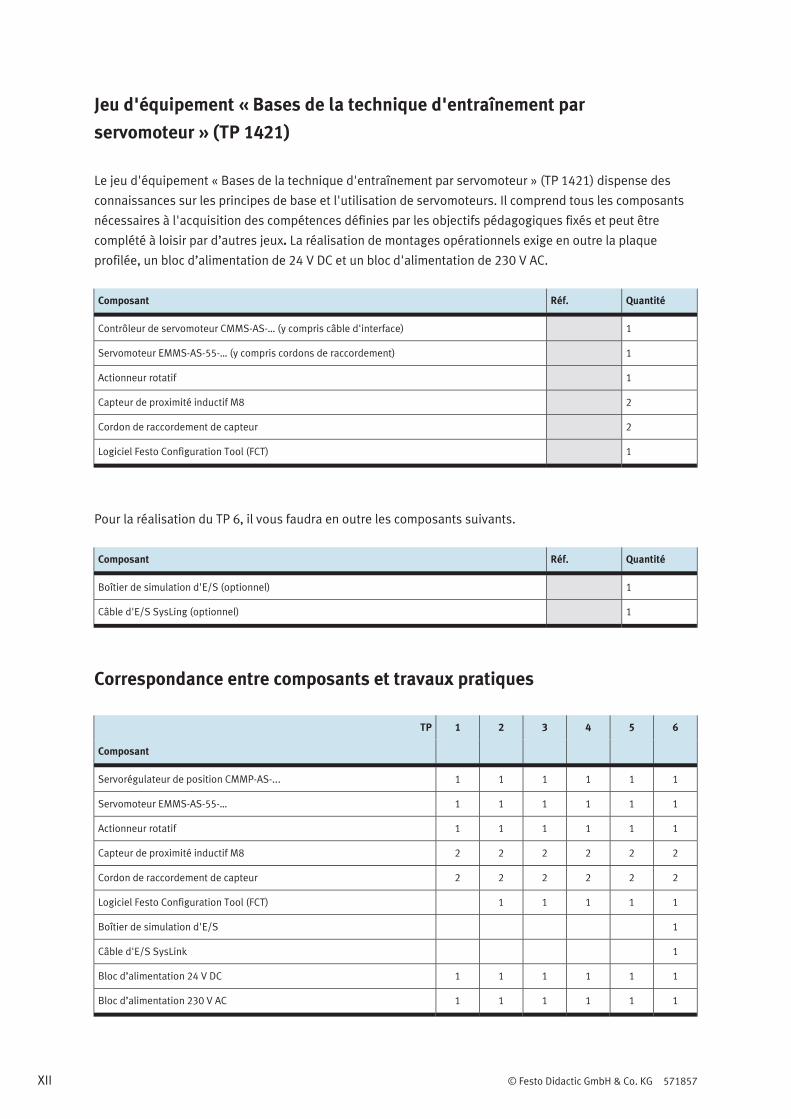
Jeu d'équipement « Bases de la technique d'entraînement par servomoteur » (TP 1421)
Le jeu d'équipement « Bases de la technique d'entraînement par servomoteur » (TP 1421) dispense des
connaissances sur les principes de base et l'utilisation de servomoteurs. Il comprend tous les composants
nécessaires à l'acquisition des compétences définies par les objectifs pédagogiques fixés et peut être
complété à loisir par d’autres jeux. La réalisation de montages opérationnels exige en outre la plaque
profilée, un bloc d’alimentation de 24 V DC et un bloc d'alimentation de 230 V AC.
Composant Réf. Quantité
Contrôleur de servomoteur CMMS-AS-… (y compris câble d'interface) 1
Servomoteur EMMS-AS-55-… (y compris cordons de raccordement) 1
Actionneur rotatif 1
Capteur de proximité inductif M8 2
Cordon de raccordement de capteur 2
Logiciel Festo Configuration Tool (FCT) 1
Pour la réalisation du TP 6, il vous faudra en outre les composants suivants.
Composant Réf. Quantité
Boîtier de simulation d'E/S (optionnel) 1
Câble d'E/S SysLing (optionnel) 1
Correspondance entre composants et travaux pratiques
TP 1 2 3 4 5 6
Composant
Servorégulateur de position CMMP-AS-... 1 1 1 1 1 1
Servomoteur EMMS-AS-55-… 1 1 1 1 1 1
Actionneur rotatif 1 1 1 1 1 1
Capteur de proximité inductif M8 2 2 2 2 2 2
Cordon de raccordement de capteur 2 2 2 2 2 2
Logiciel Festo Configuration Tool (FCT) 1 1 1 1 1
Boîtier de simulation d'E/S 1
Câble d'E/S SysLink 1
Bloc d’alimentation 24 V DC 1 1 1 1 1 1
Bloc d’alimentation 230 V AC 1 1 1 1 1 1
© Festo Didactic GmbH & Co. KG 571857 XIII
Notes à l'intention de l'enseignant ou du formateur
Objectifs pédagogiques L'objectif général du présent manuel de travaux pratiques est de faire connaissance avec les servomoteurs
ainsi qu'avec la réalisation pratique du système à servomoteur. Cette interaction directe entre théorie et
pratique est le garant de progrès rapides et durables. Les objectifs pédagogiques spécifiques sont
documentés dans la matrice. Des objectifs pédagogiques plus concrets sont affectés à chaque TP.
Temps alloué Le temps nécessaire à la réalisation d’un TP dépend des connaissances préalables de l'étudiant. Étudiants
des métiers du travail des métaux ou de l'électricité : 1 semaine environ. Ouvriers professionnels : 2 jours
environ.
Composants du jeu d'équipement Le manuel de travaux pratiques et le jeu d'équipement sont parfaitement harmonisés. Pour les TP 1 à 6,
vous n’avez besoin que des composants d’un seul jeu d’équipement TP 1421. Pour le TP 6, il vous faudra en
outre un boîtier de simulation d'E/S et un câble d'E/S SysLink. Ces deux composants ne sont pas compris
dans le jeu d'équipement.
Chaque TP peut se réaliser sur une plaque de montage à fentes ou une plaque profilée d'au moins 350 mm
de large.
Repérage dans les fiches de corrigés Le texte des corrigés et les compléments donnés dans les graphiques ou diagrammes sont repérés en
rouge.
Repérage dans les fiches de travail Les textes à compléter sont repérés par des lignes d'écriture ou des cases grisées dans les tableaux.
Les graphiques à compléter sont sur fond tramé.
Corrigés Les corrigés indiqués dans le présent manuel de travaux pratiques sont le résultat de mesures effectuées
lors d'essais. Les résultats de vos mesures peuvent différer de ces valeurs.
XIV © Festo Didactic GmbH & Co. KG 571857
Thèmes d'apprentissage La matrice suivante représente la correspondance entre les thèmes d'apprentissage des établissements de
formation professionnelle et le thème de formation aux « Systèmes à servomoteur » pour un certain nombre
de métiers.
Métier Thème
Électronicien/ne en
automatisation
Analyse de systèmes électrotechniques et contrôle de fonctions
Analyse et adaptation de commandes
Analyse d'installations et contrôle de leur sécurité
Mécatronicien/nne Installation d'équipements électriques compte tenu des aspects sécurité
Étude des flux d'énergie et d'information dans des sous-ensembles électriques, pneumatiques et
hydrauliques
Réalisation de sous-systèmes mécatroniques
Mise en service, dépannage et remise en état
Mécanicien industriel Construction et mise en service de systèmes techniques
Structure des travaux pratiques
Les 6 travaux pratiques ont la même structure méthodologique. Ils se divisent en :
• Titre
• Objectifs pédagogiques
• Problème
• Schéma d'implantation
• Projet
• Aides
• Fiches de travail
© Festo Didactic GmbH & Co. KG 571857 XV
Contenu du CD-ROM
Le manuel de travaux pratiques figure sous forme de fichier pdf sur le CD-ROM fourni. Celui-ci met en outre
à votre disposition des supports additionnels.
Le CD-ROM contient les dossiers suivants :
• Notices d’utilisation
• Fiches techniques
• Informations sur les produits
• Outils logiciels
Notices d’utilisation Des notices d’utilisation sont ici disponibles pour différents composants de l'ensemble de formation. Elles
aident à mettre en service et à utiliser les composants.
Fiches techniques Les fiches techniques des composants de l'ensemble de formation sont ici disponibles sous forme de
fichiers pdf.
Informations sur les produits Ce dossier contient des informations du fabricant pour un certain nombre de composants. La représentation
et la description des composants sous cette forme ont pour but de montrer comment sont présentés ces
composants dans un catalogue industriel. Vous y trouverez en outre des informations complémentaires sur
les composants.
Outils logiciels Des outils logiciels nécessaires pour modifier les travaux pratiques sont fournis sur le CD-ROM.
Nota
Mises à jour et d'autres outils logiciels disponibles sur Internet :
www.festo.com > Support et Téléchargements.

XVI © Festo Didactic GmbH & Co. KG 571857
© Festo Didactic GmbH & Co. KG 571857 1
TP 1 Architecture d'un système à servomoteur
Objectifs pédagogiques Quand vous aurez réalisé ce TP, vous aurez appris à
• connaître l'architecture d'un système à servomoteur et savoir le monter ;
• connaître les bases des techniques de raccordement et de montage des composants utilisés.
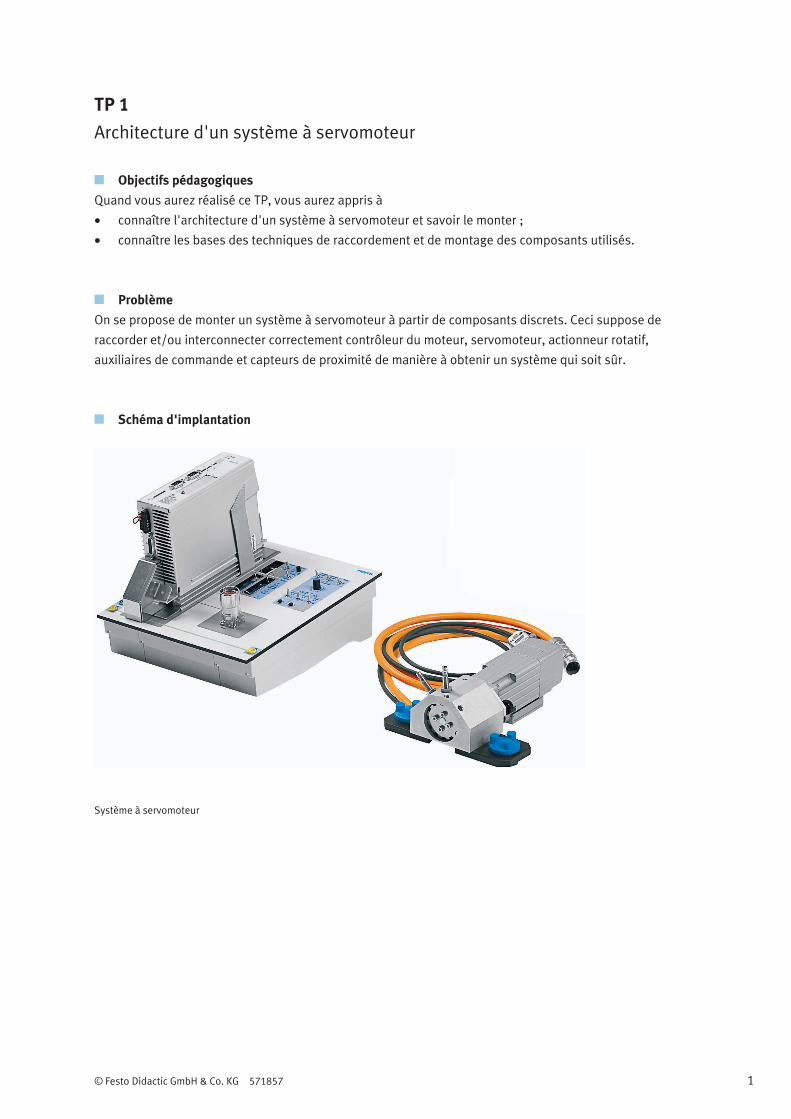
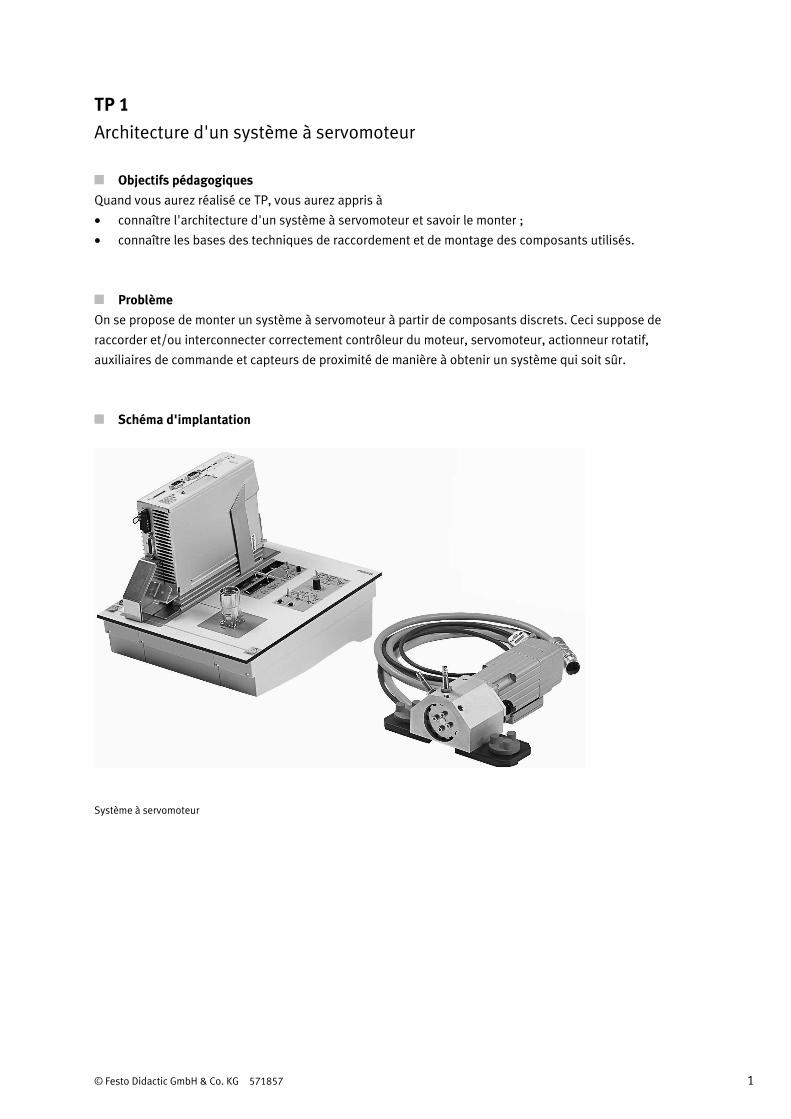
Problème On se propose de monter un système à servomoteur à partir de composants discrets. Ceci suppose de
raccorder et/ou interconnecter correctement contrôleur du moteur, servomoteur, actionneur rotatif,
auxiliaires de commande et capteurs de proximité de manière à obtenir un système qui soit sûr.
Schéma d'implantation
Système à servomoteur
TP 1 – Architecture d'un système à servomoteur
2 © Festo Didactic GmbH & Co. KG 571857
Projet 1. Décrivez l'architecture et le mode de fonctionnement des composants utilisés.
2. Reliez les sous-ensembles de manière à obtenir un système qui soit sûr.
Aides • Fiches techniques
• Notices d’utilisation
Avertissement
Ne mettez sous tension l'alimentation électrique qu'après avoir réalisé et contrôlé tous les
branchements. À l'issue du TP, coupez l'alimentation électrique avant de déposer les composants.
TP 1 – Architecture d'un système à servomoteur
© Festo Didactic GmbH & Co. KG 571857 3
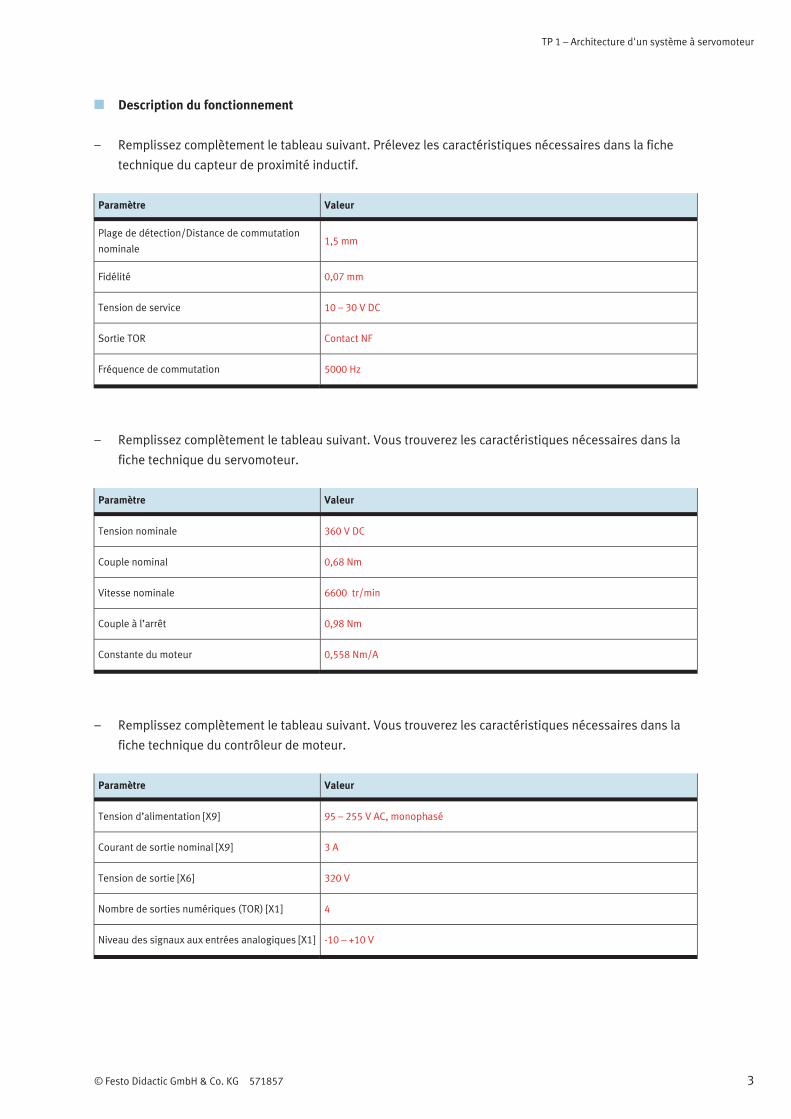
Description du fonctionnement
– Remplissez complètement le tableau suivant. Prélevez les caractéristiques nécessaires dans la fiche
technique du capteur de proximité inductif.
Paramètre Valeur
Plage de détection/Distance de commutation
nominale 1,5 mm
Fidélité 0,07 mm
Tension de service 10 – 30 V DC
Sortie TOR Contact NF
Fréquence de commutation 5000 Hz
– Remplissez complètement le tableau suivant. Vous trouverez les caractéristiques nécessaires dans la
fiche technique du servomoteur.
Paramètre Valeur
Tension nominale 360 V DC
Couple nominal 0,68 Nm
Vitesse nominale 6600 tr/min
Couple à l’arrêt 0,98 Nm
Constante du moteur 0,558 Nm/A
– Remplissez complètement le tableau suivant. Vous trouverez les caractéristiques nécessaires dans la
fiche technique du contrôleur de moteur.
Paramètre Valeur
Tension d’alimentation [X9] 95 – 255 V AC, monophasé
Courant de sortie nominal [X9] 3 A
Tension de sortie [X6] 320 V
Nombre de sorties numériques (TOR) [X1] 4
Niveau des signaux aux entrées analogiques [X1] -10 – +10 V
TP 1 – Architecture d'un système à servomoteur
4 © Festo Didactic GmbH & Co. KG 571857
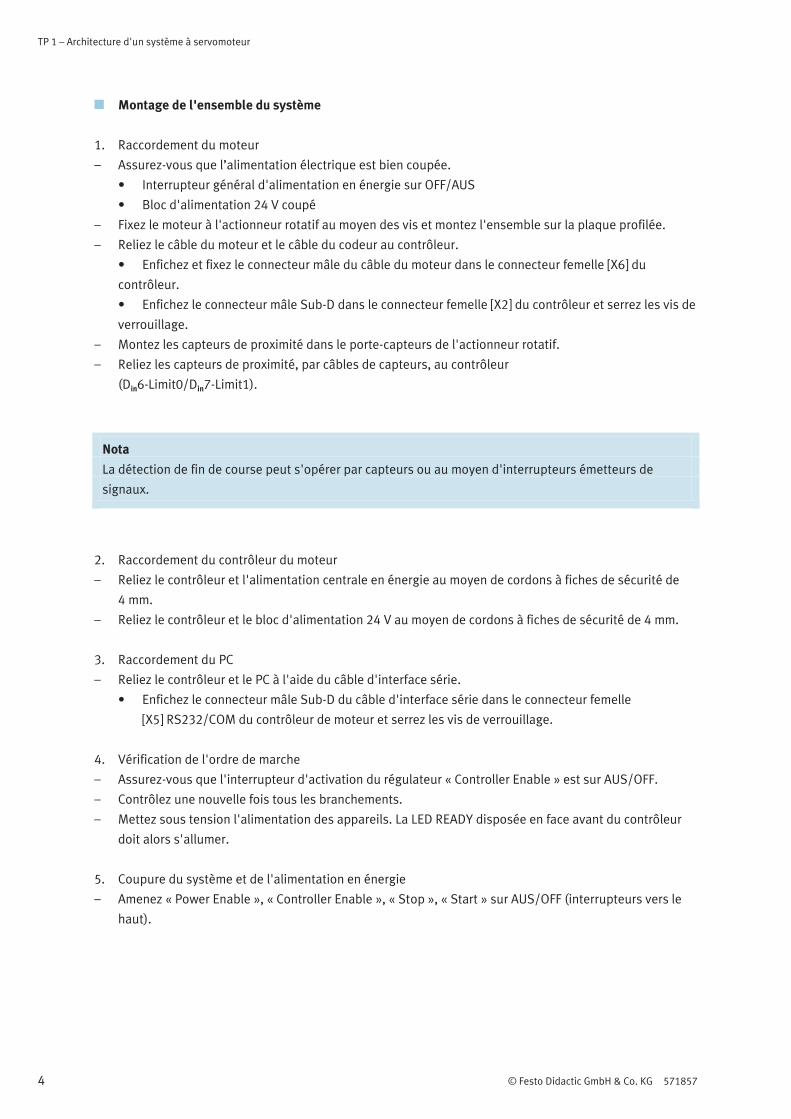
Montage de l'ensemble du système
1. Raccordement du moteur
– Assurez-vous que l’alimentation électrique est bien coupée.
• Interrupteur général d'alimentation en énergie sur OFF/AUS
• Bloc d'alimentation 24 V coupé
– Fixez le moteur à l'actionneur rotatif au moyen des vis et montez l'ensemble sur la plaque profilée.
– Reliez le câble du moteur et le câble du codeur au contrôleur.
• Enfichez et fixez le connecteur mâle du câble du moteur dans le connecteur femelle [X6] du
contrôleur.
• Enfichez le connecteur mâle Sub-D dans le connecteur femelle [X2] du contrôleur et serrez les vis de
verrouillage.
– Montez les capteurs de proximité dans le porte-capteurs de l'actionneur rotatif.
– Reliez les capteurs de proximité, par câbles de capteurs, au contrôleur
(Din6-Limit0/Din7-Limit1).
Nota
La détection de fin de course peut s'opérer par capteurs ou au moyen d'interrupteurs émetteurs de
signaux.
2. Raccordement du contrôleur du moteur
– Reliez le contrôleur et l'alimentation centrale en énergie au moyen de cordons à fiches de sécurité de
4 mm.
– Reliez le contrôleur et le bloc d'alimentation 24 V au moyen de cordons à fiches de sécurité de 4 mm.
3. Raccordement du PC
– Reliez le contrôleur et le PC à l'aide du câble d'interface série.
• Enfichez le connecteur mâle Sub-D du câble d'interface série dans le connecteur femelle
[X5] RS232/COM du contrôleur de moteur et serrez les vis de verrouillage.
4. Vérification de l'ordre de marche
– Assurez-vous que l'interrupteur d'activation du régulateur « Controller Enable » est sur AUS/OFF.
– Contrôlez une nouvelle fois tous les branchements.
– Mettez sous tension l'alimentation des appareils. La LED READY disposée en face avant du contrôleur
doit alors s'allumer.
5. Coupure du système et de l'alimentation en énergie
– Amenez « Power Enable », « Controller Enable », « Stop », « Start » sur AUS/OFF (interrupteurs vers le
haut).
TP 1 – Architecture d'un système à servomoteur
© Festo Didactic GmbH & Co. KG 571857 5
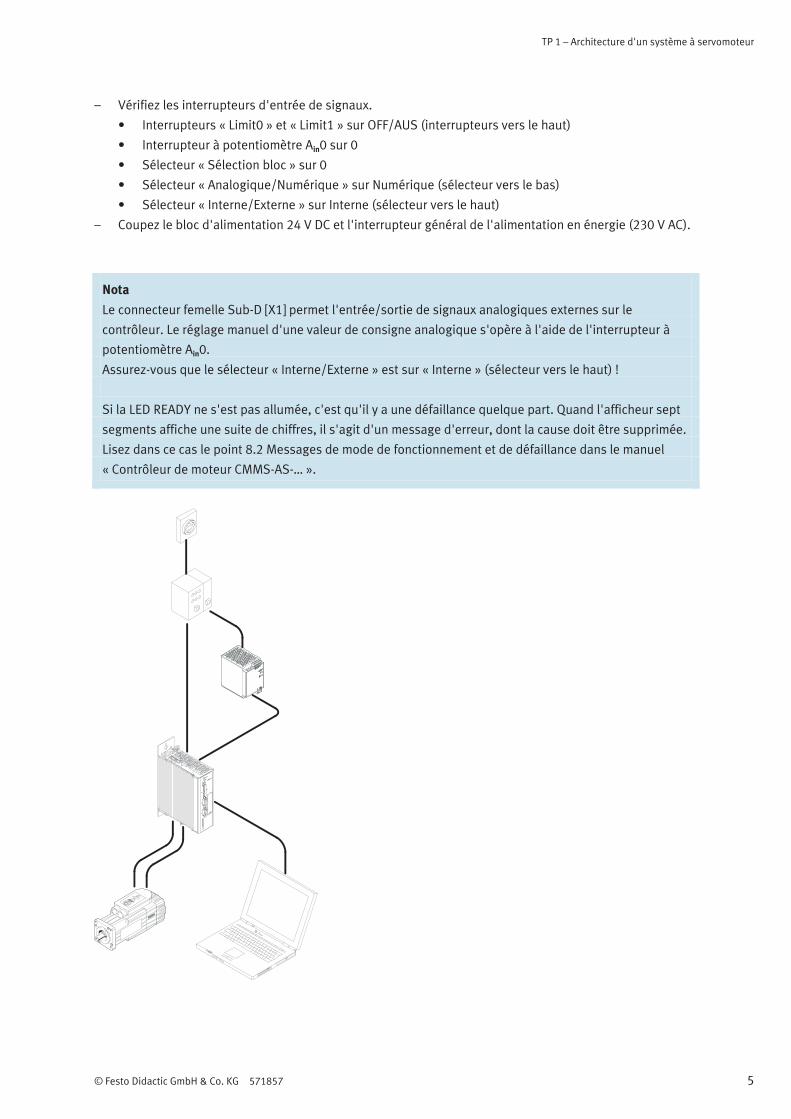
– Vérifiez les interrupteurs d'entrée de signaux.
• Interrupteurs « Limit0 » et « Limit1 » sur OFF/AUS (interrupteurs vers le haut)
• Interrupteur à potentiomètre Ain0 sur 0
• Sélecteur « Sélection bloc » sur 0
• Sélecteur « Analogique/Numérique » sur Numérique (sélecteur vers le bas)
• Sélecteur « Interne/Externe » sur Interne (sélecteur vers le haut)
– Coupez le bloc d'alimentation 24 V DC et l'interrupteur général de l'alimentation en énergie (230 V AC).
Nota
Le connecteur femelle Sub-D [X1] permet l'entrée/sortie de signaux analogiques externes sur le
contrôleur. Le réglage manuel d'une valeur de consigne analogique s'opère à l'aide de l'interrupteur à
potentiomètre Ain0.
Assurez-vous que le sélecteur « Interne/Externe » est sur « Interne » (sélecteur vers le haut) !
Si la LED READY ne s'est pas allumée, c'est qu'il y a une défaillance quelque part. Quand l'afficheur sept
segments affiche une suite de chiffres, il s'agit d'un message d'erreur, dont la cause doit être supprimée.
Lisez dans ce cas le point 8.2 Messages de mode de fonctionnement et de défaillance dans le manuel
« Contrôleur de moteur CMMS-AS-… ».

TP 1 – Architecture d'un système à servomoteur
6 © Festo Didactic GmbH & Co. KG 571857
© Festo Didactic GmbH & Co. KG 571857 I
Table des matières
Travaux pratiques et fiches de travail
TP 1 : Architecture d'un système à servomoteur _________________________________________________1
TP 2 : Configuration et mise en service d'un système à servomoteur _________________________________7
TP 3 : Régulation de vitesse d'un système à servomoteur _______________________________________ 19
TP 4 : Mise en référence et positionnement dans un système à servomoteur ________________________ 43
TP 5 : Positionnement et contrôle de séquence ________________________________________________ 57
TP 6 : Programme de déplacement avec enchaînement de blocs __________________________________ 73

II © Festo Didactic GmbH & Co. KG 571857
© Festo Didactic GmbH & Co. KG 571857 1
TP 1 Architecture d'un système à servomoteur
Objectifs pédagogiques Quand vous aurez réalisé ce TP, vous aurez appris à
• connaître l'architecture d'un système à servomoteur et savoir le monter ;
• connaître les bases des techniques de raccordement et de montage des composants utilisés.
Problème On se propose de monter un système à servomoteur à partir de composants discrets. Ceci suppose de
raccorder et/ou interconnecter correctement contrôleur du moteur, servomoteur, actionneur rotatif,
auxiliaires de commande et capteurs de proximité de manière à obtenir un système qui soit sûr.
Schéma d'implantation
Système à servomoteur
TP 1 – Architecture d'un système à servomoteur
2 Nom : __________________________________ Date : ____________ © Festo Didactic GmbH & Co. KG 571857
Projet 1. Décrivez l'architecture et le mode de fonctionnement des composants utilisés.
2. Reliez les sous-ensembles de manière à obtenir un système qui soit sûr.
Aides • Fiches techniques
• Notices d’utilisation
Avertissement
Ne mettez sous tension l'alimentation électrique qu'après avoir réalisé et contrôlé tous les
branchements. À l'issue du TP, coupez l'alimentation électrique avant de déposer les composants.
TP 1 – Architecture d'un système à servomoteur
© Festo Didactic GmbH & Co. KG 571857 Nom : __________________________________ Date : ____________ 3
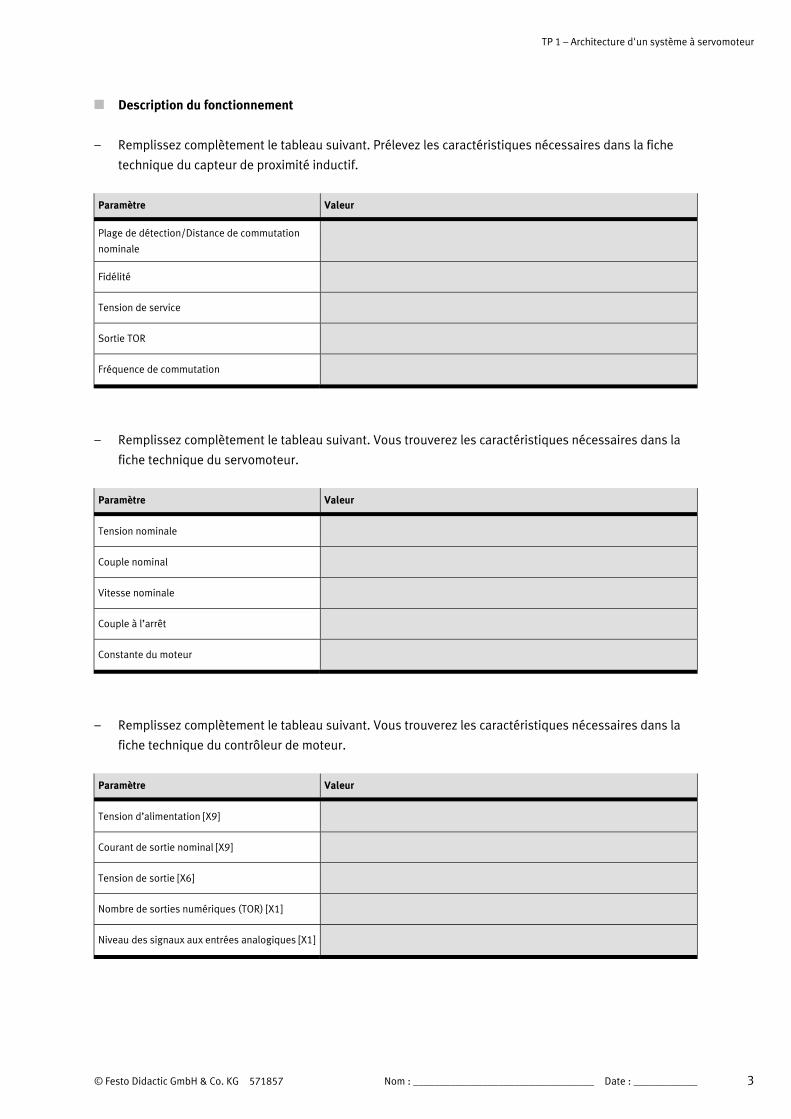
Description du fonctionnement
– Remplissez complètement le tableau suivant. Prélevez les caractéristiques nécessaires dans la fiche
technique du capteur de proximité inductif.
Paramètre Valeur
Plage de détection/Distance de commutation
nominale
Fidélité
Tension de service
Sortie TOR
Fréquence de commutation
– Remplissez complètement le tableau suivant. Vous trouverez les caractéristiques nécessaires dans la
fiche technique du servomoteur.
Paramètre Valeur
Tension nominale
Couple nominal
Vitesse nominale
Couple à l’arrêt
Constante du moteur
– Remplissez complètement le tableau suivant. Vous trouverez les caractéristiques nécessaires dans la
fiche technique du contrôleur de moteur.
Paramètre Valeur
Tension d’alimentation [X9]
Courant de sortie nominal [X9]
Tension de sortie [X6]
Nombre de sorties numériques (TOR) [X1]
Niveau des signaux aux entrées analogiques [X1]
TP 1 – Architecture d'un système à servomoteur
4 Nom : __________________________________ Date : ____________ © Festo Didactic GmbH & Co. KG 571857
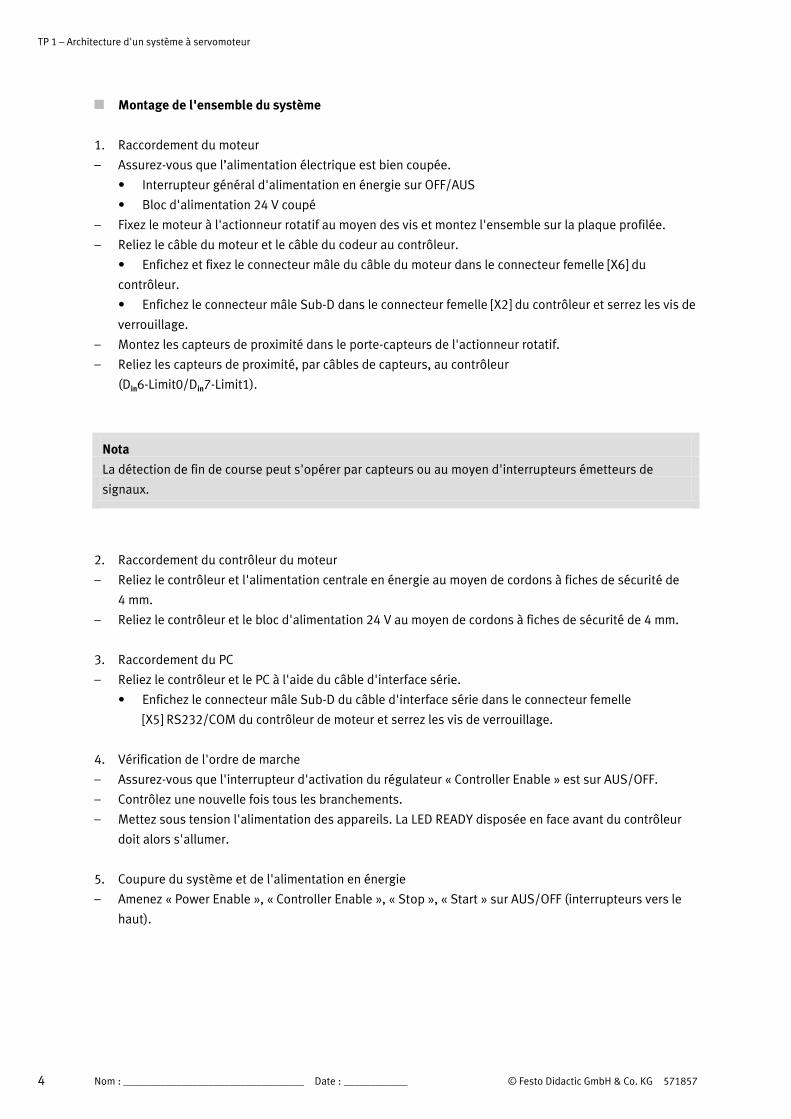
Montage de l'ensemble du système
1. Raccordement du moteur
– Assurez-vous que l’alimentation électrique est bien coupée.
• Interrupteur général d'alimentation en énergie sur OFF/AUS
• Bloc d'alimentation 24 V coupé
– Fixez le moteur à l'actionneur rotatif au moyen des vis et montez l'ensemble sur la plaque profilée.
– Reliez le câble du moteur et le câble du codeur au contrôleur.
• Enfichez et fixez le connecteur mâle du câble du moteur dans le connecteur femelle [X6] du
contrôleur.
• Enfichez le connecteur mâle Sub-D dans le connecteur femelle [X2] du contrôleur et serrez les vis de
verrouillage.
– Montez les capteurs de proximité dans le porte-capteurs de l'actionneur rotatif.
– Reliez les capteurs de proximité, par câbles de capteurs, au contrôleur
(Din6-Limit0/Din7-Limit1).
Nota
La détection de fin de course peut s'opérer par capteurs ou au moyen d'interrupteurs émetteurs de
signaux.
2. Raccordement du contrôleur du moteur
– Reliez le contrôleur et l'alimentation centrale en énergie au moyen de cordons à fiches de sécurité de
4 mm.
– Reliez le contrôleur et le bloc d'alimentation 24 V au moyen de cordons à fiches de sécurité de 4 mm.
3. Raccordement du PC
– Reliez le contrôleur et le PC à l'aide du câble d'interface série.
• Enfichez le connecteur mâle Sub-D du câble d'interface série dans le connecteur femelle
[X5] RS232/COM du contrôleur de moteur et serrez les vis de verrouillage.
4. Vérification de l'ordre de marche
– Assurez-vous que l'interrupteur d'activation du régulateur « Controller Enable » est sur AUS/OFF.
– Contrôlez une nouvelle fois tous les branchements.
– Mettez sous tension l'alimentation des appareils. La LED READY disposée en face avant du contrôleur
doit alors s'allumer.
5. Coupure du système et de l'alimentation en énergie
– Amenez « Power Enable », « Controller Enable », « Stop », « Start » sur AUS/OFF (interrupteurs vers le
haut).
TP 1 – Architecture d'un système à servomoteur
© Festo Didactic GmbH & Co. KG 571857 Nom : __________________________________ Date : ____________ 5
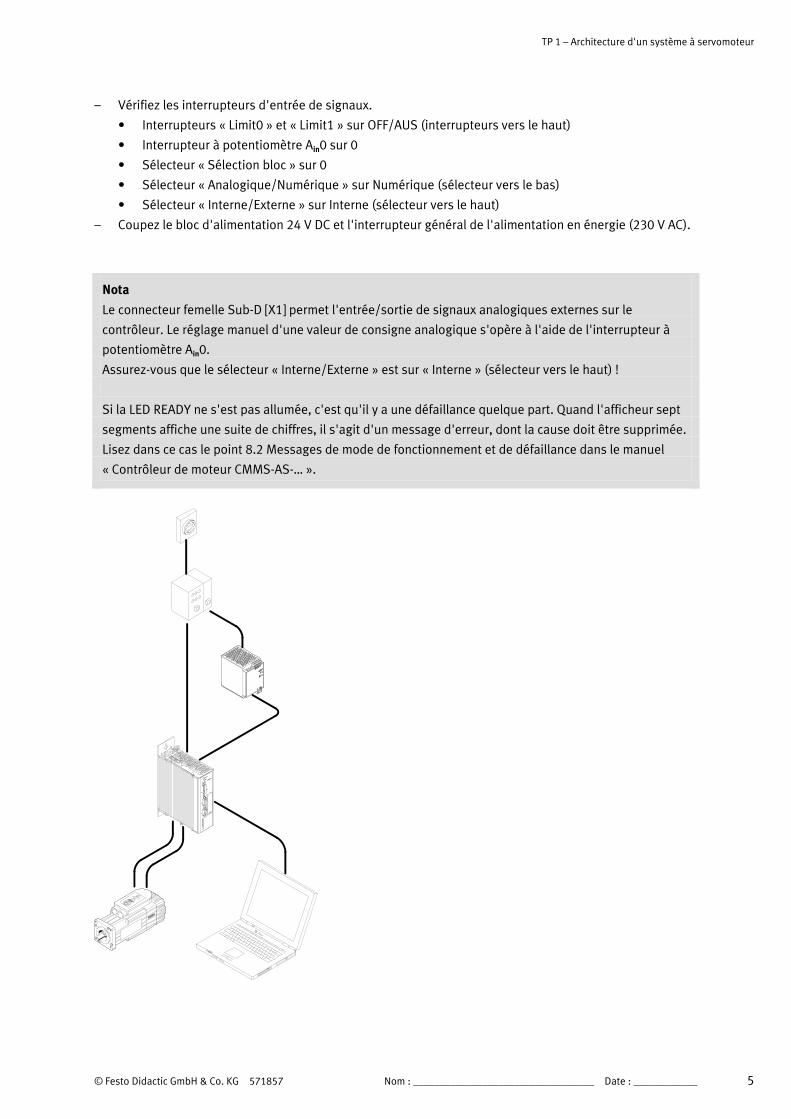
– Vérifiez les interrupteurs d'entrée de signaux.
• Interrupteurs « Limit0 » et « Limit1 » sur OFF/AUS (interrupteurs vers le haut)
• Interrupteur à potentiomètre Ain0 sur 0
• Sélecteur « Sélection bloc » sur 0
• Sélecteur « Analogique/Numérique » sur Numérique (sélecteur vers le bas)
• Sélecteur « Interne/Externe » sur Interne (sélecteur vers le haut)
– Coupez le bloc d'alimentation 24 V DC et l'interrupteur général de l'alimentation en énergie (230 V AC).
Nota
Le connecteur femelle Sub-D [X1] permet l'entrée/sortie de signaux analogiques externes sur le
contrôleur. Le réglage manuel d'une valeur de consigne analogique s'opère à l'aide de l'interrupteur à
potentiomètre Ain0.
Assurez-vous que le sélecteur « Interne/Externe » est sur « Interne » (sélecteur vers le haut) !
Si la LED READY ne s'est pas allumée, c'est qu'il y a une défaillance quelque part. Quand l'afficheur sept
segments affiche une suite de chiffres, il s'agit d'un message d'erreur, dont la cause doit être supprimée.
Lisez dans ce cas le point 8.2 Messages de mode de fonctionnement et de défaillance dans le manuel
« Contrôleur de moteur CMMS-AS-… ».

TP 1 – Architecture d'un système à servomoteur
6 Nom : __________________________________ Date : ____________ © Festo Didactic GmbH & Co. KG 571857





























