Embed Size (px)
Citation preview

1
L’activité musculaire volontaire:le contrôle moteur
Chapitre 11
Rigal Robert
Toute action motrice volontaire est de natureperceptivo-motrice:
d’abord s’informer du contexte d’action (leperceptif);
puis agir en fonction de l’intention (le moteur).
L’activité musculairevolontaire

2
Contrôle moteur et apprentissagemoteur: interrogations
Quelques questions auxquelles doiventrépondre les recherches sur le contrôle moteuret l’apprentissage moteur:1- comment s'ajustent les contractionsmusculaires?- leur organisation spatio-temporelle;- les muscles intervenant et le moment de leurintervention;- l'impulsion: compromis entre la forcedéveloppée et la durée de son application.
Contrôle moteur et apprentissagemoteur: interrogations
2- comment répète-t-on les mêmesmouvements?3- où sont stockés les engrammes moteurs?4- comment génère-t-on des mouvementsjamais réalisés auparavant?5- pourquoi peut-on refaire le mêmemouvement et l'améliorer d'une répétition àl'autre?

3
Rôle du cortex cérébral dansle contrôle des mouvements:
un court historiqueles première études remontent au 19ième siècle;
les neurologues et les physiologistes del ’époque établissent que le cortex cérébraljoue un rôle dans le contrôle des mouvements.
Photographie du cerveau de Leborgne par Paul Broca.Origins of Neuroscience, Finger, p.38
Paul Broca propose une localisation desfonctions dans différentes régions ducortex cérébral (son nom sera donné auxaires frontales du langage).

4
John Hughlings Jackson ( 1835-1911)Origins of Neuroscience, Finger, p.195.
John Hughlings Jacksona été le premier àproposer l’existenced’une organisationsomatotopique dans lecortex moteur.
ses conclusions étaient engrande partie tirées de sesobservations faites chezles patients atteintsd’épilepsie.
Edouard Hitzig (1838-1907),découverte du cortex moteur en1870 avec Gustav Fritsch.Origins of Neuroscience, Finger,p.39.
Cerveau d’un chien par Fritsch et Hitzig.Une stimulation électrique des zonesmarquées produit un mouvement du côtéopposé du corps.

5
Schéma de l’hémisphère gauche dusinge de David Ferrier (1886)Origins of Neuroscience, Finger, p.199
En 1886, DavidFerrier montrait quela stimulationélectrique de diversesrégions corticales dusinge induisait desmouvements.
À partir des donnéesrecueillies chez l ’humain:
on définit les mécanismes de contrôle utilisés;
on déduit le rôle des structures nerveusesimpliquées dans le contrôle;
les pathologies du système nerveux sont aussitrès utilisées comme les maladies qui affectentle contrôle des mouvements:
atteintes cérébelleuses, maladie deParkinson, etc.

6
études de lésions pour inactiver la structure;stimulation de la structure pour l ’activer par:– stimulation électrique,– stimulation pharmacologique;
plus récemment, enregistrement de l’activitédes neurones qui composent la structure:
avant, pendant et après le mouvement;électrodes implantées à demeure(enregistrements chroniques).
À partir des données recueillieschez l’animal, les fonctions sont
complétées
Contrôlemoteur
(fig. 11.1)
Récepteursvisuels
Voies cortico-spinales
Cervelet
Aires occipitales
Aires pariétales Aires motrices
AiresfrontalesThalamus

7
Paradigmes du contrôlemoteur
Je m’informe
J’agis
Je traite l’information
approche STI
Perception- action directe
approche écologique
Contraintesdu milieu
approche SDNL
Approches du contrôle moteur(fig. 11.2)
LE TRAITEMENT DE L'INFORMATION:L'ACTION APRÈS LA PERCEPTION
LE PROGRAMME MOTEUR
PERCEPTION TRAITEMENT ACTION
L'APPROCHE ÉCOLOGIQUE:L'ACTION DANS LA PERCEPTION
L'ACTION DIRECTE
PERCEPTION ACTION
?
LES SYSTÈMES DYNAMIQUES NON LINÉAIRES :LES MOUVEMENTS RYTHMIQUES
PARAMÈTRESDE CONTRÔLE
PARAMÈTRESD'ORDRE
STRUCTURES DECOORDINATION

8
Paradigme du traitement del’information dans le contrôle
moteurle sujet perçoit puis analyse l’information etdétermine sa réponse motrice en l’espace de quelquesfractions de seconde;nous construisons par apprentissage des programmesmoteurs que nous utilisons par la suite pour contrôlerles mouvements;pour modifier un mouvement, il suffit d’en ajuster lesparamètres à la situation présente;le contrôle des mouvements consiste à réduire l’écartentre le mouvement désiré et celui réalisé en utilisantles signaux d’erreur.
Activité musculaire volontairePour chaque action volontaire, je dois donc déterminer:
le contexte d’action:quel est l’environnement dans lequel j’agis?
les paramètres (caractéristiques) du mouvement:cinétiques: forcecinématiques: direction, trajectoire, amplitude,
vitesse, accélération, duréela catégorie de mouvements:
lents: modifiables pendant leur déroulement (contrôle en boucle fermée)
rapides (balistiques): non modifiables après leurdéclenchement (contrôle en boucle ouverte)cette activité est à la base de l’apprentissage moteur.

9
Pour étudier le contrôlemoteur chez l’humain
On enregistre les mouvements et ses composantescinétiques, cinématiques et électromyographiques(enregistrements de l ’activité électrique desmuscles).
la cinétique– étude des forces qui
stabilisent et quiproduisent lesmouvements
la cinématique– description du
mouvement du corps etde ses caractéristiques:
distance parcourue
direction
durée, vitesse
accélération
Le contrôle desmouvements diffère selon
leur vitesse.
Mouvements lents ou de poursuite:– contrôle en boucle fermée
Mouvements rapides ou balistiques:– contrôle en boucle ouverte

10
Mouvement lentle sujet doit fléchirlentement le coude;il n’y a pas d’activité del’antagoniste;l’activité de l’agoniste etle mouvement seproduisent en mêmetemps;freinage par la visco-élasticité de l’antagoniste
Mouvements lentsmouvements mono-articulaires lents oumouvements de poursuite:– seul le muscle agoniste intervient au cours de
l ’exécution du mouvement;– le freinage repose essentiellement:
sur les caractéristiques visco-élastiques desmuscles agonistes et antagonistes,sur l’action de résistances externes.
mouvements de poursuite d’une cible:dessiner le contour du cercle avecle curseur de la souris,demande un feed-back continu dela périphérie, co-contraction de musclesantagonistes pour une plus grandeprécision.

11
Mouvement lentLe mouvement peut être corrigé au cours deson déroulement
Valeur à atteindre
Écart
Décision
Contrôle en boucle fermée(fig. 11.8)
Effecteur
Programmation de l’action
ComparateurProgramme Correct
Valeur atteinte
ACTION Feed-back
le sujet doit fléchir rapidement lecoude sans se préoccuper de laposition finale;1- le sujet sait que le mouvementsera freiné:– par la limitation articulaire;– par un stop extérieur mis en
place par l’expérimentateur;pas d’activité de freinage del’antagoniste;une seule bouffée d’activité dansl ’agoniste.
Mouvement rapide ou balistiquedurée entre 75 et 200 ms;

12
2- le sujet doit aller très vite etprécisément d’un endroit à unautre et s’y arrêter;on observe la classique triplebouffée d’activitéélectromyographique EMG– 1. agoniste– 2. antagoniste– 3. agoniste– corrélation entre l’intensité de
l’activité dans l’antagoniste etla vitesse du mouvement.
les ré-afférences somesthésiquesne jouent aucun rôle dans l ’arrêtdu mouvement: tout estprogrammé.
Mouvements balistiques
Décision
ACTION
Valeur atteinte
Contrôle en boucle ouverte(fig. 11.8)
Mouvement balistiqueLe mouvement n’est pascorrigé au cours de sondéroulement;Les centres encéphaliquesprécisent tous lesparamètres de l’initiationet du déroulement dumouvement sansréafférences (feed-back)
Valeur à atteindre
Effecteur
Programmation de l’action

13
Pro
gram
me
mot
eur
Pro
gram
me
mot
eur
Boucles decontrôle
(fig. 11.9)
L’activité musculaire volontaire(fig. 11.14)Les 5 étapes de la mise en
place de l’action motrice:décision
aires frontalesassociatives
(planification)
noyaux griscentraux
(programmation)Cervelet
(programmation)
aires pariétalesassociatives
(planification)
aires motrices(exécution)
voies cortico-spinales(exécution)
aires frontalessystème limbique
(décision)
Cervelet(correction)
planificationprogrammationexécutioncorrection

14
Les étapes du mouvement:1- la planification
Lors de la planification du mouvement:les cortex associatifs frontal et pariétal sont activés enpremiers:– image du but à atteindre (« quoi faire »?)– anticipation des ré-afférences– succession des phases
le cortex associatif frontalassocié au système limbique
système limbique associé àla motivation à l ’action;satisfaction des besoinsvitaux;apprentissage.
le cortex associatif pariétal
contexte spatial dumouvement;
la stratégie varie selonle rapport despositions corps-objet.
deuxième étape dans la préparation du mouvement;
correspond au « comment faire ?»;
jeu de circuits intra-encéphaliques qui se terminerontdans le cortex moteur, l’un des centres de départ desvoies descendantes corticospinales;
organisation en série à travers ces boucles;
l’activation simultanée de plus d ’une boucle suggèreaussi une programmation en parallèle;
la programmation implique probablement plusieursautres boucles intra-corticales.
Les étapes du mouvement:2- la programmation

15
La programmation des paramètresdu mouvement (fig. 11.14)
Voie cortico-ponto-cérébello-thalamo-corticale
Voie cortico-striato-pallido-thalamo-corticale
Boucles intra-encéphaliquesintervenant dans laprogrammation desparamètres dumouvement;
2 boucles qui sollicitent:– les ganglions de la
base
– le cervelet
Boucle sollicitant lesganglions de la base

16
Boucle cortico- striato- pallido- thalamo- corticale
Aires motricessupplémentaires Aires motrices
Aires frontalesassociatives
Aires pariétalesassociatives
Noyaux de la base
Thalamus
les aires pariétales etfrontales projettent auxganglions de la base;ces ganglions jouent unrôle important dansl ’établissement descomportementsmoteurs simples(putamen) et complexes(noyau caudé);et dans la mémorisation,le choix de stratégies etla programmation desparamètres dumouvement
– force– direction– amplitude
(fig. 11.14)
Boucle sollicitant lecervelet

17
Boucle cortico- ponto- cérébello- thalamo- corticale
Aires frontalesassociatives
Aires pariétalesassociatives
Noyaux du pont
CerveletThalamus
Aires motriceselle constitue l’un desnombreux circuitssusceptibles deprogrammer lemouvement;les parties latérales ducervelet contribuent à laprogrammation desmouvements distaux;la partie médianecontribue auxajustements posturaux;projectionscérébelleuses (par lethalamus) nombreuses àl’aire 4;les cellules cérébelleusesont une déchargesemblable à celle descellules de l’aire 4.
(fig. 11.14)
Modulations exercées par lecervelet et les ganglions de la base
meilleure adaptation des étapes desmouvements volontaires dans:– la planification,– le démarrage,– la coordination,– le guidage,– l’arrêt.

18
Les étapes du mouvement:3- l’exécution
les données arrivent aux aires 6 et 4 ducortex moteur frontal et sont transforméesen influx nerveux moteurs qui se rendent àla moelle épinière par les voiescorticospinales;
l’activation des neurones corticospinaux seproduit 150 à 200 ms avant le début dumouvement;une fois l’exécution d ’un mouvementrapide lancée, il ne sera plus possible de lemodifier en cours de route (exemples:tennis, baseball).
voies cortico-spinales
Les cellules de l’aire 4 codentla force lors du mouvement
– l ’aire 4 représente la voie de sortie descommandes motrices liées aux paramètres dumouvement;
– l ’enregistrement unitaire des neurones de lavoie pyramidale dans l’aire 4 montre que lafréquence de décharge varie en fonction de laforce de la contraction musculaire.
(fig. 2.22)

19
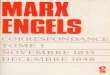
A- À partir du point central, le singedoit effectuer cinq mouvements depointage, distribués au hasard, pourchacune des huit directions possibles,en réponse à l'allumage de la cible.Les décharges d'une cellule du cortexmoteur sont enregistrées pour les 40essais et alignées sur le début dumouvement de la main en directionde la cible. La cellule répondpréférentiellement pour une directiondonnée et de moins en moins(inhibition) au fur et à mesure quel'on s'éloigne de cette direction.
Codage nerveux et direction dumouvement (Kalaska, 1991) (fig. 12.8, p. 575)
B- Cette représentation sous formevectorielle de la réponse de la cellule A àun mouvement vers la gauche (flèchepointillée) illustre le fait que l'importancede la décharge de la cellule (flèche en traitépais), pour chaque direction demouvement, varie globalement commeune fonction du cosinus de l'angle formépar la direction préférée de la réponse dela cellule (flèche en trait plein) et ladirection réelle du mouvement. Elleaugmente au fur et à mesure que les deuxdirections se rapprochent.
C- Somme des réponses de 262 cellules motrices corticales à unmouvement vers la gauche. La complexité de la commande motriceest révélée par les contributions variables des différentes cellulesdont la résultante globale correspond à la direction du mouvementrequis.
Codage nerveux et direction dumouvement (Kalaska, 1991) (fig. 12.8, p. 575)

20
Exécution et projectionsdescendantes du cortex
les projections corticospinales– les cellules d’origine sont localisées dans le cortex
cérébral;
60% des fibres proviennent des airesmotrices du cortex frontal aires 4 et 6 ainsique de l’aire motrice supplémentaire;
40% des fibres proviennent du cortexpariétal, aires 3, 1 ,2 , 5 et 7.
1- Les voies pyramidales
Les influx descendants dusystème corticospinal
transfèrent à la moelle les données du programmemoteur;contiennent les paramètres du mouvement:– la force
pour un mouvement d ’une même amplitude,la décharge augmente avec la force à vaincre;
– la vitesseil existe une relation entre la vitessemaximale du mouvement et la déchargemaximale de la cellule (impulsion);
– la directionsollicitation d’un groupe musculaire au lieud’un autre en fonction du mouvement désiré.

21
Moelle épinière motoneurones
Muscles
Cortex cérébral(6, 4, 3, 1, 2, 5) 60% 40%
Les voies encéphalo-spinales: le système pyramidal
Thalamus
Cervelet
Noyaux du pont
Noyaux de la base
Substance noire
Vo
ie c
ort
ico
-b
ulb
air
e
Voies cortico-spinales
directe ccccrrrrooooiiiissssééééeeee
Musclestête et cou
Noyauxmoteursdu tronccérébral
(fig. 11.11)
Les voies pyramidales (fig. 11.11B)
moelle
bulbe
aires corticales 4-6-3-1-2-5
20% ne croisent pas la lignemédiane:
–forment la voie pyramidale directe,–dans le cordon ventro-médian de lamoelle,–fibres se terminant sur lesmotoneurones de muscles axiaux etproximaux des deux côtés.
80% croisent la ligne médiane après lespyramides bulbaires; elles forment lavoie pyramidale croisée (dorso-latérale)qui se termine sur les motoneurones desmuscles distaux.

22
trouvent leur origine dans:des aires corticales très diverses (préfrontales,frontales -6 et 4-, pariétales -3, 1, 2, 5, 7- ettemporales);des noyaux sous-corticaux (noyaux de la base,mésencéphale -tectum, noyau rouge etsubstance noire- bulbe rachidien -noyauxvestibulaires, substance réticulée- cervelet);interviennent dans le contrôle de la posture etde la locomotion, et, de façon plus généraledans celui de la motricité.
Les projections descendantes ducortex et des centres sous-corticaux2- Les voies extrapyramidales
– aires corticalespréfrontales,frontales 6 et 4,pariétales 3 1 2 5 7
– aires sous-corticalesganglions de labasemésencéphale
– tectum– noyau rouge– substance noire
cerveletbulbe rachidien
– noyauxvestibulaires
– formationréticulée
Système extrapyramidalNoyaux et boucles de feed-back qui influencentl’activité volontaire desmuscles en dehors de la voiecorticospinale (pyramidale)

23
Moelle épinière: motoneurones
Muscles
Substance noire
Cortex cérébral (préfrontal 6,4,2,7, temporal)
Noyaux de la base
Thalamus
Les voies encéphalo-spinales: le système extrapyramidal
TectumColliculessupérieurs
Voie tecto-spinale
Noyaurouge
Voie rubro-spinale
Noyauxréticulaires
Voie réticulo-spinale
Noyauxvestibulaires
Voie vestibulo-spinale
Noyaux du pont
Cervelet
(fig. 11.11)
Les voies extrapyramidales
moelle
bulbe
aires corticales 6-4-3-1-2-8
réticulospinale– issue des noyaux de
la formationréticulée (locomotion,posture)
substance réticulée
vestibulospinale– issue des noyaux
vestibulaires(équilibre, yeux)
noyauxvestibulaires
rubrospinale– issue du noyau rouge
dans le mésencéphale(motricité distale)
noyaurouge
tectospinale– issue du tectum
(collicules supérieurs)dans le mésencéphale(mouvementsoculaires)
tectum
(fig. 11.11C)

24
Le contrôle moteur desmembres et du tronc s’effectuepar des projections à la moelle
épinière
Les motoneurones constituent la voiecommune finale de sortie du système
nerveux pour contrôler les mouvements
Neurone sensitif
Ganglion spinal
Neurone moteur
IN mot.
IN sens
Figure 2.29a Les voies médullaires motricesCordon latéral
Cordon antérieur
F. réticulo-spinal latéral
F. rubro-spinal
F. vestibulo-spinal
F. réticulo-spinal médian
F. tecto-spinal
F. pyramidal direct
F. pyramidal croisé
(fig. 2.29, p. 118)

25
Les étapes du mouvement lent:4- la correction
Le mouvement lent: correctionen cours de routeLe cervelet– reçoit une copie de la commande
motrice envoyée aux muscles;– reçoit une information de feed-
back de la périphérie.Valeur à atteindre
Programmation de l’action
Effecteur
ACTION
Écart
Valeur atteinte
Cervelet: comparateur « en ligne »
Feed-back
déchargecorollaire
(fig. 11.9)
Les étapes du mouvement rapide:la correction
Le mouvement balistique:le mouvement estprogrammé;son efficacité tient à lamémorisation :– du feed-back (retour du
mouvement),– de la décharge corollaire
(retour du programme);intégration de cesinformations pour référencefuture (apprentissage).
Valeur à atteindre
Programmation de l’action
Effecteur
ACTION
Valeur atteinte
Comparateur
Feed-back
déchargecorollaireÉcart
future
(fig. 11.9)

26
Réponses réflexes etvolontaires (fig. 11.17)
Le sujet tient une poignéeavec la main. La poignéeeffectue un mouvementbrusque provoquant la flexionde la main que le sujet doitcontrer (instant 0).Plusieurs réponsesmusculaires se produisentdans les muscles extenseursdu poignet avec des temps delatence de: 32 ms pour M1, 59ms pour M2, 85 ms pour M3et 110 ms pour VOL. (réponsevolontaire).
Activité musculaire volontaireÉtapes de l’apprentissage d’un mouvement:
Étape cognitive:s’informer sur le contexte et la tâche
Étape préparatoire:que faire? et comment le faire? planifierpréparer le programme moteur
Étape active:le faire; réaliser la commande motrice
Étape évaluative:évaluer le résultat; feedbacks
Étape mnémonique:s’entraîner, répéter

27
Les étapes du mouvementapprentissage
intégration desinformations pour référencefuture;le cervelet peut jouer ce rôleen intégrant:– le feed-back (retour du
mouvement);– la décharge corollaire
(retour du programme);– l ’écart est mémorisé
comme référence future.le cervelet joue un rôlemajeur dansl ’apprentissage moteur
Valeur à atteindre
Programmation de l’action
Effecteur
ACTION
Valeur atteinte
Décision
Écart
Comparateur
Feed-back
Activité musculaireautomatique
répétition d'un geste
libère l'attention
formation d’engrammes(mouvements mémorisés)

28
Modifications des fonctionscérébrales suite à un traumatisme
crânien
La commotion cérébralefréquente chez les sportifs, elle résulte, le plus souvent, d’unchoc et entraîne des dysfonctions neuropsychologiques etcomportementales attribuables à la présence de foyers dedestruction microscopique ou d'une désorganisationsynaptique dans le tronc cérébral.quantification des dommages:
Paramètres de l ’American Academy of Neurology– Niveau 1
confusion sans perte de conscience,symptômes qui disparaissent en moins de 15 minutes.
– Niveau 2confusion sans perte de conscience,symptômes qui ne disparaissent pas en moins de 15minutes.
– Niveau 3confusion et perte de conscience.

29
Paradigme des systèmesdynamiques non linéaires
(SDNL)les comportements moteurs résultent del’interaction de différentes contraintes;la modification de l’une des contraintes provoqueun changement complet du comportement;comment apparaissent ces métamorphoses?
Perspective des systèmesdynamiques non linéaires (SDNL)système :ensemble organisé d'éléments le constituant;dynamique : qui évolue avec le temps;non linéaire: une variation régulière de la valeur de
l’ un des éléments du système provoque unchangement subit d’une autre variable, une rupturedans le fonctionnement global du système et l’atteinted’un nouvel état d'équilibre ou comportement noncontenu (latent) dans l'état précédent.
Dispositif constitué par la réunion, l'associationd’éléments ou de systèmes dont les relations varientavec le temps et qui peut générer une activitéordonnée et complexe (système hormonal).

30
SYSTÈMEDYNAMIQUE
Perspective des systèmesdynamiques non linéaires (SDNL)
CONTRAINTES
SUJET
TÂCHE ENVIRONNEMENTCOORDINATION
PERCEPTIVO-MOTRICE
APPRENTISSAGE MOTEURCONTRÔLE DES
DEGRÉS DE LIBERTÉ
PERCEPTION
ACTION
Perspective des systèmesdynamiques non linéaires (SDNL)Paramètre de contrôle ou variable indépendante:
variable qui agit sur le comportement global dusystème et qui produit le changement.
ex.:l'augmentation progressive de la températuretransforme la glace -> eau -> vapeur;l'augmentation de la fréquence des mouvements desindex produit le passage d’un mouvement alterné àun mouvement simultané: transition de phase;l’augmentation de la fréquence des pas chez le chevalle fait passer du pas au trot puis au galop.

31
Perspective des systèmesdynamiques non linéaires (SDNL)Paramètre d’ordre, variable dépendante ou collective:
caractérise le comportement étudié, la relation visibleentre les interactions des éléments du système (ladescription);la phase relative en est un exemple, mais peu sontconnus (comme tout change en permanence, difficilede trouver la cause directe du changement);caractérise de façon explicite les relations entre lesmouvements des deux membres (dans le cas demouvements rythmiques, la phase relative) ou lemouvement individuel du membre.
Perspective des systèmesdynamiques non linéaires (SDNL)
Expérience des index (Kelsoet Schoner, 1988)(fig. 11.3)
Tâche:produire des mouvementstransverses (abd-add. ouflex-ext.) des index,simultanés et cycliques,dans un plan horizontal ouvertical.
Wallace, 1996

32
Expérience de Kelso (SDNL) (fig. 11.3)
Chacune des 2 courbes représente le mouvement de flexion-extension de l’un des deux index. Les mouvements initiauxsont supposés, a priori, presque périodiques.À l’instant initial t=0, le sujet meut ses index lentement; ilssont en opposition de phase, l’un en flexion, l’autre enextension: leur différence de phase est égale à ππππ, soit 180°. Enaccélérant progressivement la fréquence des mouvements des2 index, un décalage progressif se produit en même temps quela différence de phase diminue et que les mouvements desdoigts deviennent synchrones; la différence de phase est alorsnulle, égale à 0° ou 360°.
Indexgauche
Indexdroit
temps
flexion
extension
Perspective des systèmes dynamiquesnon linéaires (SDNL) (fig. 11.3)
Le mouvement de phase entre les deux doigts devientsynchrone en 10 périodes
transition de phase
opposition de phase180°
en phase0°

33
Perspective des systèmes dynamiquesnon linéaires (SDNL) (fig. 11.3)
Indexgauche
Indexdroit
Le mouvement de phaseentre les deux doigtsdevient synchrone en 3périodes
Calcul de la différence de phase:
DP= tcible-t0 x360
tréférence-t0
t0 t cible t référence
Perspective des systèmesdynamiques non linéaires (SDNL)
Phase relative en opposition de phase Phase relative en phase

34
Les avant-bras reposant sur deuxleviers articulés au coude, le sujet doitfaire 15 mouvements bimanuelscycliques, à une fréquence de unmouvement par seconde donnée parun métronome, d’une amplitude de 60°pour le bras gauche et de 90° pour lebras droit. Chaque série d’essaicommence au centre (/\) du dispositif.Le sujet doit tenter de mettre en placeet de conserver une différence dephase de 90° entre les mouvements desdeux avant-bras pour produire uneellipse (en pointillés),le bras gauche déplaçant le curseursur l’axe des ordonnées et le bras droitsur l’axe des abcisses. Le résultat desmouvements est visible sur un écran.Jour 1 (Prétest) : stabilité en phase desmouvements des deux mains, d’où ilrésulte des tracés en diagonale
Jour 3 (Posttest) : nouvellestabilité en opposition dephase de 90° des mouvementsdes deux mains, d’où ilrésulte des tracés en ellipse
Figure 11.4
Perspective des systèmesdynamiques non linéaires (SDNL)Paramètres de contrôle:
+ type de mouvement: en phase (0°) (les doigts sedéplacent ensemble vers le centre ou l’extérieur) ouen opposition de phase (180°) (les doigts se déplacenten même temps vers la droite ou vers la gauche);calcul de la phase relative entre la position des 2index (même expérience avec flexion-extension).
+ fréquence de l’oscillation: imposée de 1 Hz à 3 Hzavec des augmentations en plateau de .25 Hz(échelonnage).

35
Apprentissage moteur etsystèmes dynamiques
TennisContraintes liées:
à la tâche: frapper une balle avec une raquette, pardessus un filet, pour qu'elle tombe à l'intérieur d'unrectangle;au sujet: tenir la raquette, exercer une force,maintenir son équilibre, anticipation-coïncidence,temps de réaction, tactique, technique, stress;à l'environnement: hauteur du filet, taille du terrain,type de sol, vent, température, position du soleil,spectateurs.Conséquence: synergie émergente, soit la frappe de laballe (coordination motrice); le sujet n'a pasconscience du processus, seulement du résultat.
Paradigme de l'approcheécologique du contrôle moteur
pas de traitement conscient de l’information; mise en place, par l’évolution, de systèmes moteursutilisant directement la perception (sorte de forme« supérieure » de réflexes);grande importance accordée à la vision, seul systèmesensoriel auquel la théorie s’est, d’ailleurs, intéressée.

36
L'approche écologique ducontrôle moteur
Flux optique: défilement et disparition desobjets vers l'arrière lorsque nous nousdéplaçons vers l'avant;apporte des données fondamentales sur notreéquilibre ou notre mouvement dans l’espace,mais aussi sur les déplacements (vitesse etdirection) des objets dans notre champ visuel.
L'approche écologique ducontrôle moteur (fig. 11.5)
Dilatation de l’image rétinienne
cristallin rétine
A B C
T1 T2 T3
A' B'C'
Au fur et à mesure que la balle se rapproche de l’œil,la taille de sa projection sur la rétine augmente, prendde l’expansion (A’, B’, C’). C’est le taux de cetteexpansion que le système action-perception utiliseraitpour déterminer le temps avant contact.

37
L'approche écologique ducontrôle moteur (fig. 11.5)
Le temps avant-contact est égal àZ(t) /V ou à R(t) /V(t)soit le rapport entre lataille de la projectionrétinienne et la vitessede l’expansion del’image rétinienne.
Rt
Vt
Rt: taille de la projection rétinienne de l’objet;Vt: vitesse d’expansion de l’image rétinienne.
V
objet
T1 T2
Distance œil-objet
Zt
Taille de l’objet R OeilPlan dela rétine
αααα1
L'approche écologique ducontrôle moteur
Variable tau (ττττ):donnée égale à l’inverse de la vitessed’expansion ou de dilatation de l’imagerétinienne de l’obstacle ou, encore, aurapport entre, d’un côté, la séparationangulaire de deux points quelconques del’image de l’obstacle et, de l’autre, lavitesse de la séparation de ces deux pointssur la rétine.

38
Équilibre: vision et proprioception( Lee – Aronson, fig. 11.7 )
Déplacement vers la gauche de la«pièce». Le flux optique indique àl’enfant qu’un mouvement seproduit.Ne percevant pas le déplacement dela pièce, mais percevant le flux,l’enfant pense qu’il est en train detomber vers l’avant.Il corrige alors sa pseudo-chute encontractant ses muscles postérieurs......et tombe pour de bon versl’arrière !
La pièce mobile est immobile etl’enfant regarde vers le mur dufond.
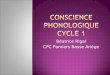
L'approche écologique du contrôle moteur (fig. 11.6)(Influence de la hauteur de chute d'une balle sur le moment de
flexion des genoux dans une tâche d'attraper (d'aprèsHeuer, 1996, p. 263)
Trois balles sont lancéesà tour de rôle de troishauteurs distinctes (3, 5et 7m) et le sujet a pourconsigne de les frapper àla plus grande hauteurpossible.Les lignes horizontalesfléchées indiquent ledébut de flexion desgenoux (flèchesupérieure) et celui deleur flexion maximale(flèche inférieure).
A- Modèlethéorique: si le sujetamorçait sonmouvement deflexion en fonctiondu passage de laballe à une hauteurdéterminée, cemouvementdébuterait plus tôtpour la chute de 3m que pour celle de5 ou 7 mètres.
Temps avant contactau sol en cs
hau
teu
r en
m
0
1
2
3
4
5
6
7
8
11
0
90
70
50
30
10
Temps avant contact ausol en cs

39
L'approche écologique ducontrôle moteur (figure 11.6)
B- Modèle observé:compte tenu de lavitesse de chute, lemouvement deflexion débute plustôt pour la chute de7m que pour les 2autres afin depermettre uneextension plusprécoce et unefrappe de balle laplus élevée possible.
Temps avant contactau sol en cs
hau
teu
r en
m
0
1
2
3
4
5
6
7
8
11
0
90
70
50
30
10
Temps avant contact ausol en cs
A
Temps avant contact ausol en cs
t
(tau
) en
s
0
1
2
3
4
5
6
7
11
0
90
70
50
30
10
B
Temps avant contact ausol en cs
Conclusionsquel que soit le paradigme retenu, lesystème nerveux doit intervenir pourgénérer les contractions musculaires à labase de la coordination, en ajustant lesparamètres;
l’action est plus complexe que la simpleréaction:elle s’inscrit dans un contextequi la détermine.

40
Dysfonctions motrices (p. 152)
Difficulté à réussir ses actions motricesconsécutive à des déficits sensoriels ou moteurs;
Praxie: ensemble de mouvements coordonnésen fonction d’un but à atteindre;
Apraxie: disparition d’un comportementmoteur auparavant bien maîtrisé (contrôlemoteur);
Dyspraxie: difficulté d’acquisition d’uncomportement moteur (développementmoteur).
ApraxiesPerturbation de l’exécution motrice du gestequi ne concerne que:des programmes appris;la planification et la programmation dumouvement;la motricité volontairement déclenchée.

41
Apraxiesles apraxies motrices: le geste ne peut plus êtredéclenché (atteinte des aires motrices) (perte de figureen trampoline);les apraxies idéomotrices : difficultés à mimer ou àfaire des gestes symboliques: dire "au revoir" de lamain, faire le salut militaire; ne comportent pasl’utilisation d’objets;les apraxies idéatoires : difficultés à utiliser des objets:mettre une lettre dans une enveloppe, allumer uneallumette, repas;les apraxies constructives souvent associées à descauses visuo-spatiales (manipulation et assemblaged'éléments comme le Lego ou Duplo, graphisme etdessin);les apraxies de l'habillage : difficultés à mettre leshabits, les souliers.
Fin du cours