Embed Size (px)
Citation preview
1
Malek GHANES°, Jesus DE LEON*, Alain GLUMINEAU+
Commande de la Machine Asynchrone sans Capteur
Mécanique et Résultats Expérimentaux
Introduction
Commande de la machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
Réunion GDR-CE2
Le 30 mars 2006
°GREYC (Caen), *UANL (Mexique), +IRCCyN (Nantes)
2
1. Introduction
6. Conclusion
2. Commande non-linéaire de la MAS
3. Observateur non-linéaire de la MAS
P
L
A
N5. Résultats expérimentaux
4. Convergence globale « Commande+Observateur »
3
Commande sans capteur mécanique :
Position du problème
Objectifs
Introduction
Commande de la machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
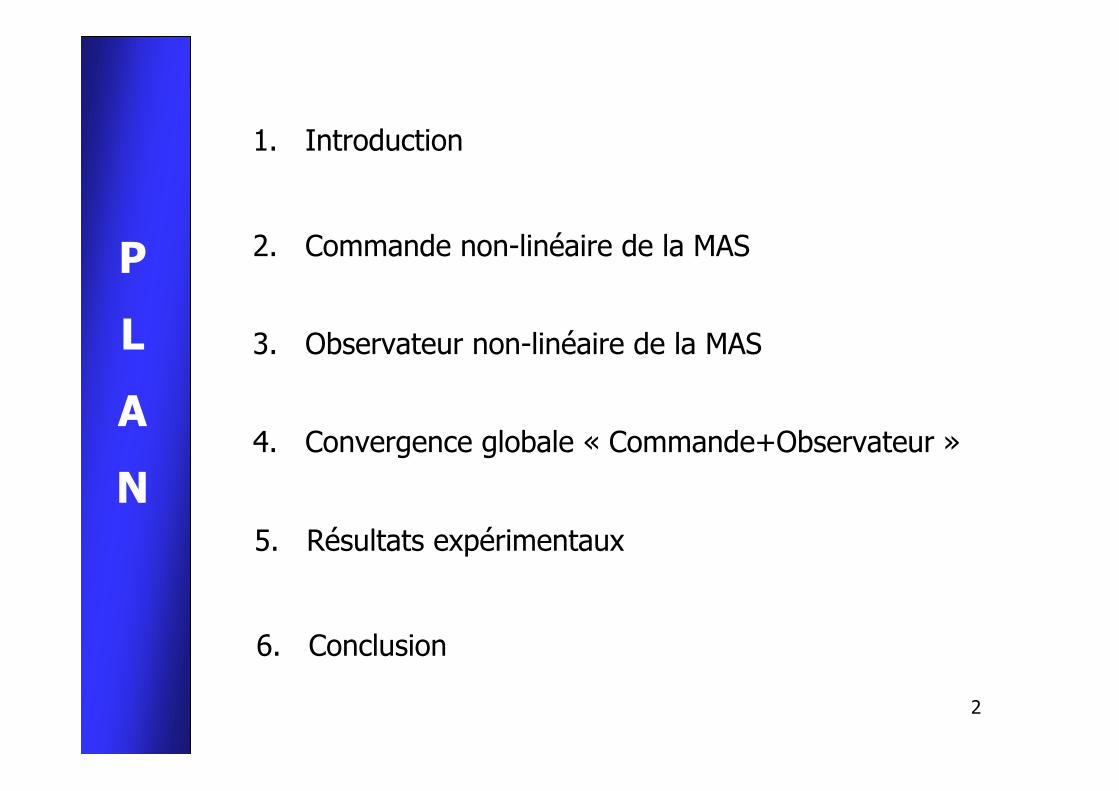
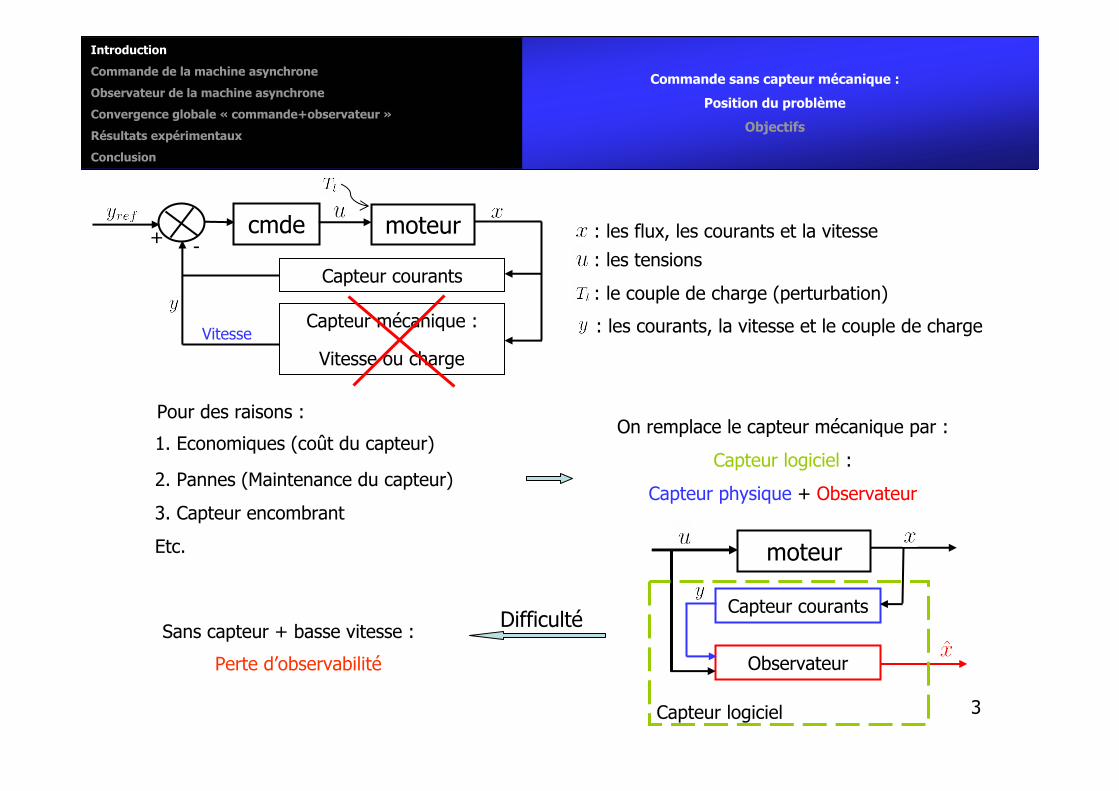
Capteur mécanique :
Vitesse ou charge
Capteur courants
moteur-+ : les flux, les courants et la vitesse
: les tensions
: le couple de charge (perturbation)
: les courants, la vitesse et le couple de chargeVitesse
On remplace le capteur mécanique par :
Capteur logiciel :
Capteur physique + Observateur
Observateur
moteur
Capteur courants
Capteur logiciel
DifficultéSans capteur + basse vitesse :
Perte d’observabilité
1. Economiques (coût du capteur)
2. Pannes (Maintenance du capteur)
3. Capteur encombrant
Etc.
Pour des raisons :
cmde
4
1. Conception d’une commande sans capteur (associée à un observateur de vitesse) pour la MAS
2. Démontrer la convergence globale de l’ensemble « commande + observateur »
3. Valider expérimentalement l’ensemble « commande + observateur » sur le ‘‘Benchmark Commande sans capteur’’
Commande sans capteur mécanique :
Position du problème
Objectifs
Introduction
Commande de la machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
5
1. Avoir le couple moteur qui est proportionnel au courant statorique(comme dans une MCC à flux constant)
� Commande vectorielle directe [Blaschke, 72]
2. Contrôler la vitesse mécanique
� Commande par mode glissant [Ghanes, 05]
Commande vectorielle par modes glissants
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
6
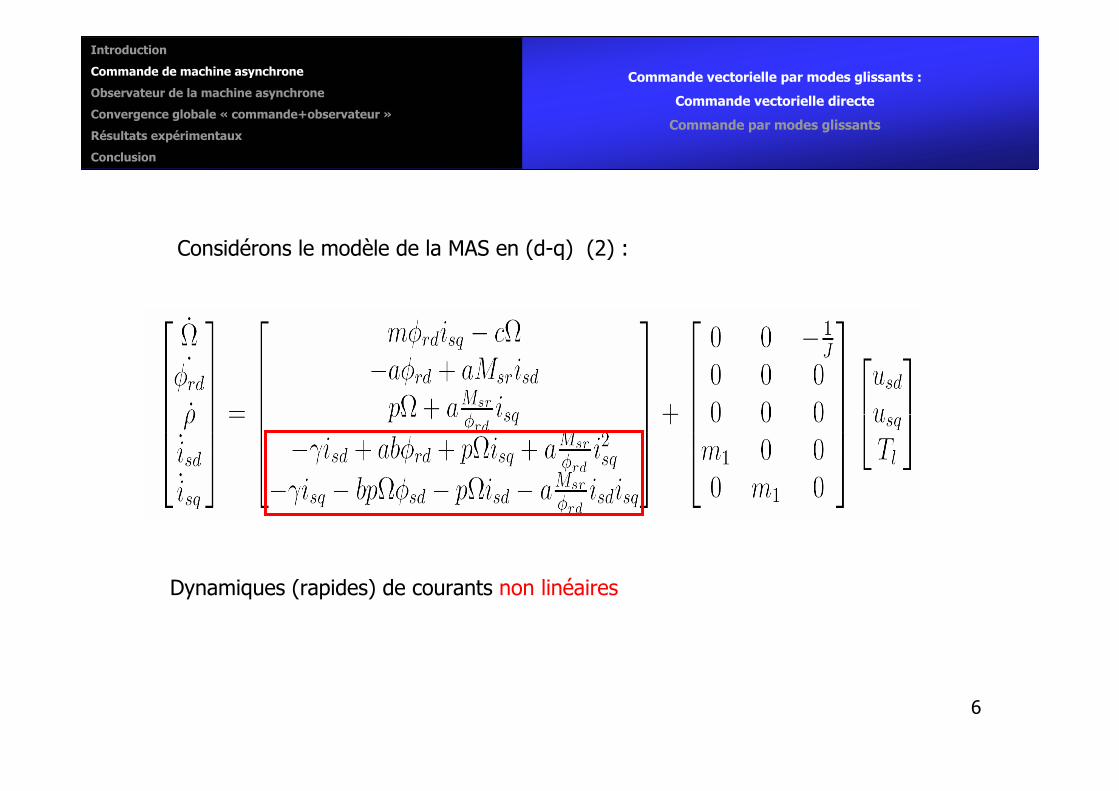
Considérons le modèle de la MAS en (d-q) (2) :
Dynamiques (rapides) de courants non linéaires
Commande vectorielle par modes glissants :
Commande vectorielle directe
Commande par modes glissants
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
7
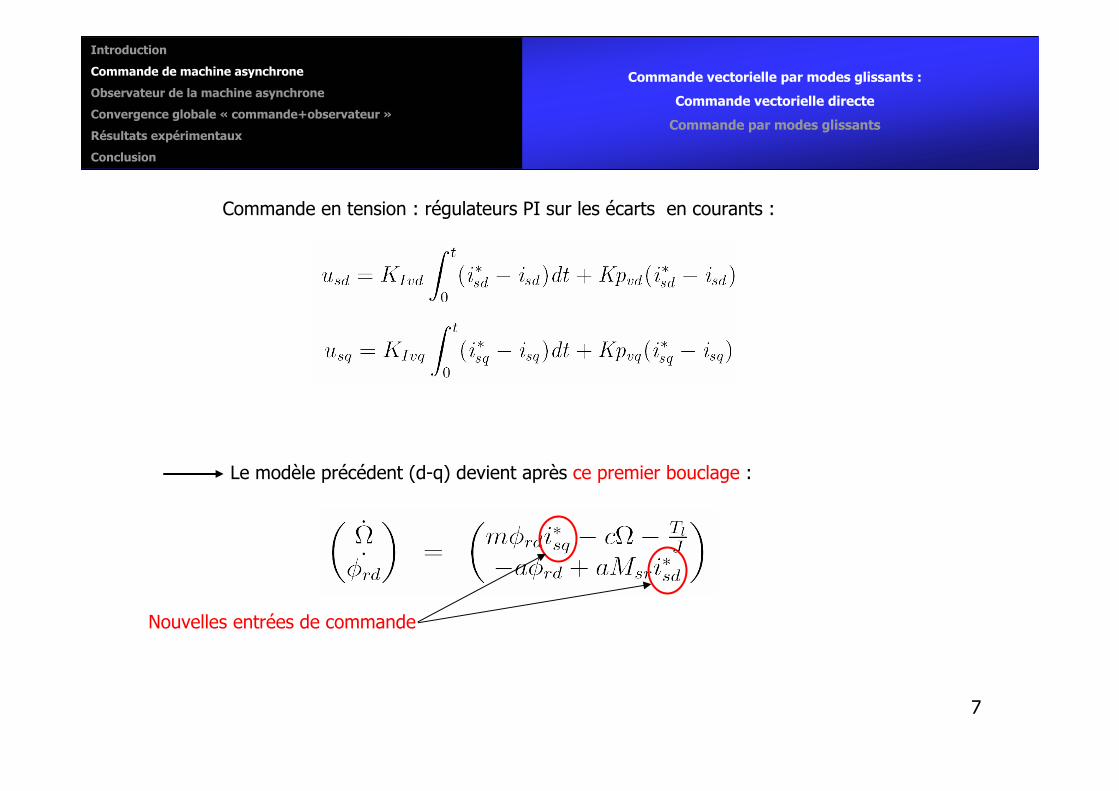
Le modèle précédent (d-q) devient après ce premier bouclage :
Commande en tension : régulateurs PI sur les écarts en courants :
Nouvelles entrées de commande
Commande vectorielle par modes glissants :
Commande vectorielle directe
Commande par modes glissants
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion

8
Dans ce repère (d-q) le flux est aligné sur l’axe d :
Le couple moteur est proportionnel au produit et :
Commande vectorielle par modes glissants :
Commande vectorielle directe
Commande par modes glissants
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion

9
Régulateur PI sur le flux :
Le couple moteur devient proportionnel au courant statorique :
où :
Par conséquent la vitesse devient proportionnelle à :
où : et
Commande vectorielle par modes glissants :
Commande vectorielle directe
Commande par modes glissants
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
10
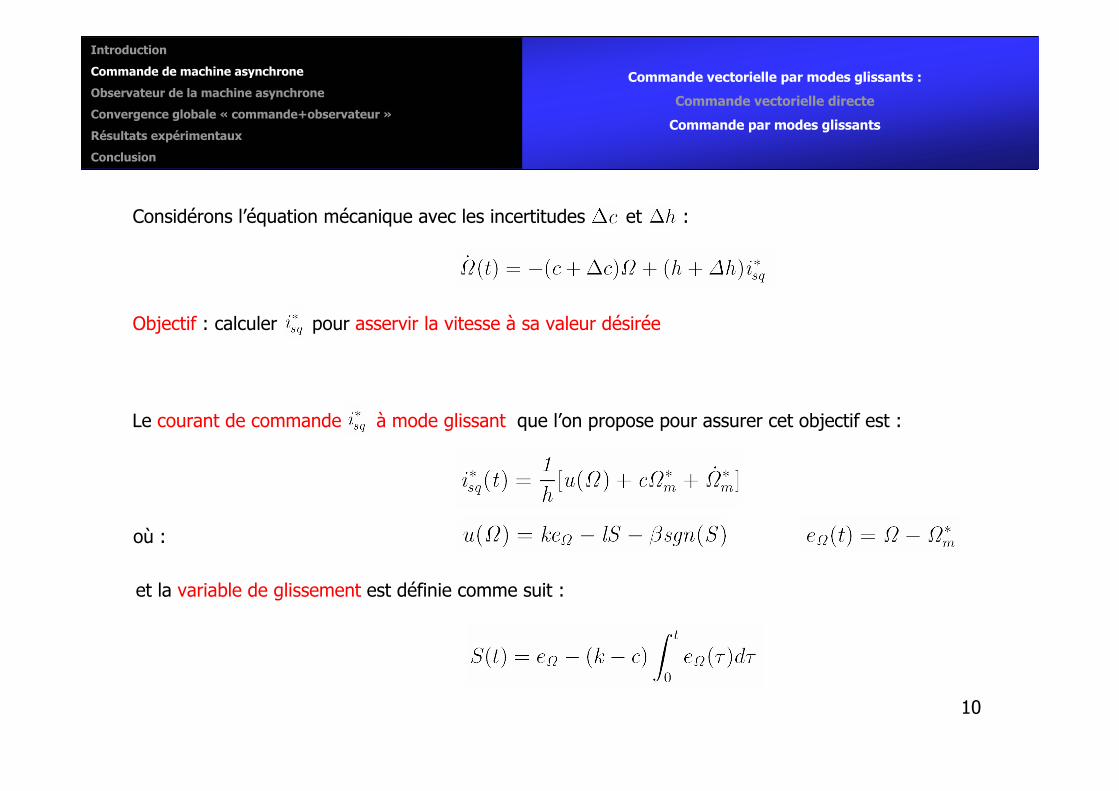
Considérons l’équation mécanique avec les incertitudes et :
Objectif : calculer pour asservir la vitesse à sa valeur désirée
Le courant de commande à mode glissant que l’on propose pour assurer cet objectif est :
où :
et la variable de glissement est définie comme suit :
Commande vectorielle par modes glissants :
Commande vectorielle directe
Commande par modes glissants
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
11
Dans le cas où un SNL peut être écrit comme une interconnexion entre plusieurs sous-systèmes satisfaisants certaines conditions, un observateur peut être synthétisé.
Concevoir un observateur pour tout le système à partir de la synthèse séparée des observateurs pour chaque sous-système, en supposant que pour chaque observateur calculé, les états des autres sous-systèmes soient disponibles.
Deux observateurs à grand gain interconnectés :
Principe
Conception
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
12
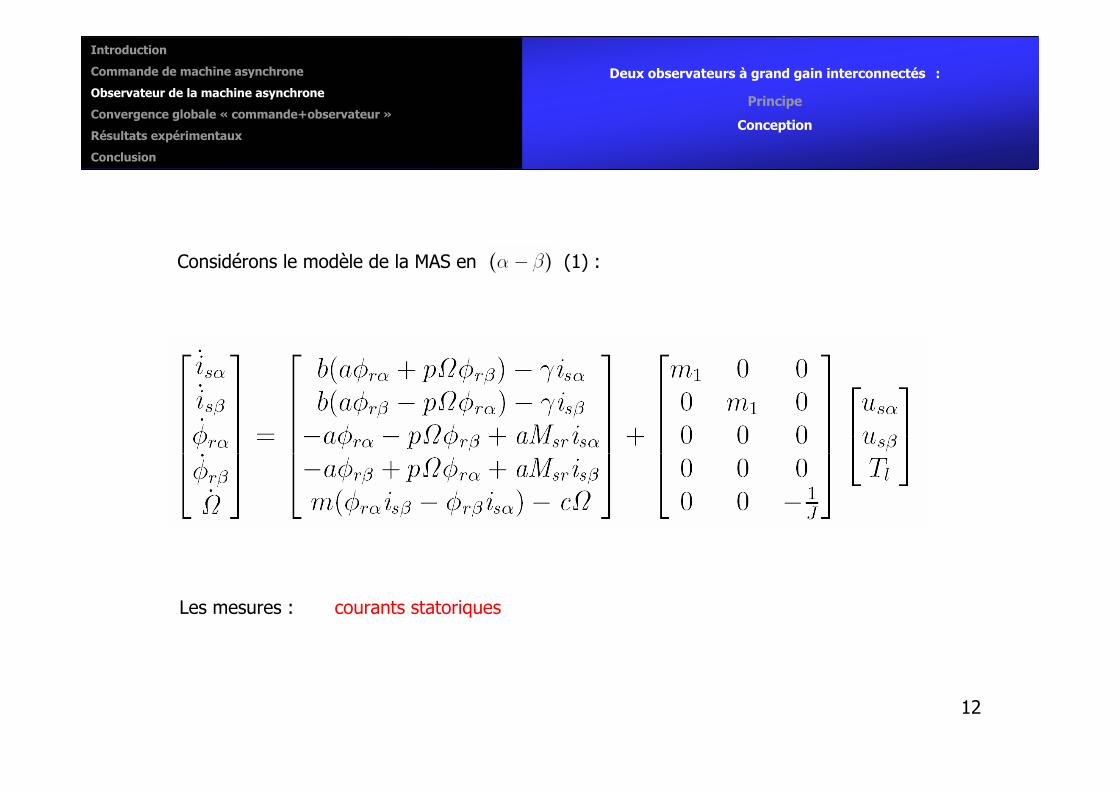
Les mesures : courants statoriques
Considérons le modèle de la MAS en (1) :
Deux observateurs à grand gain interconnectés :
Principe
Conception
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
13
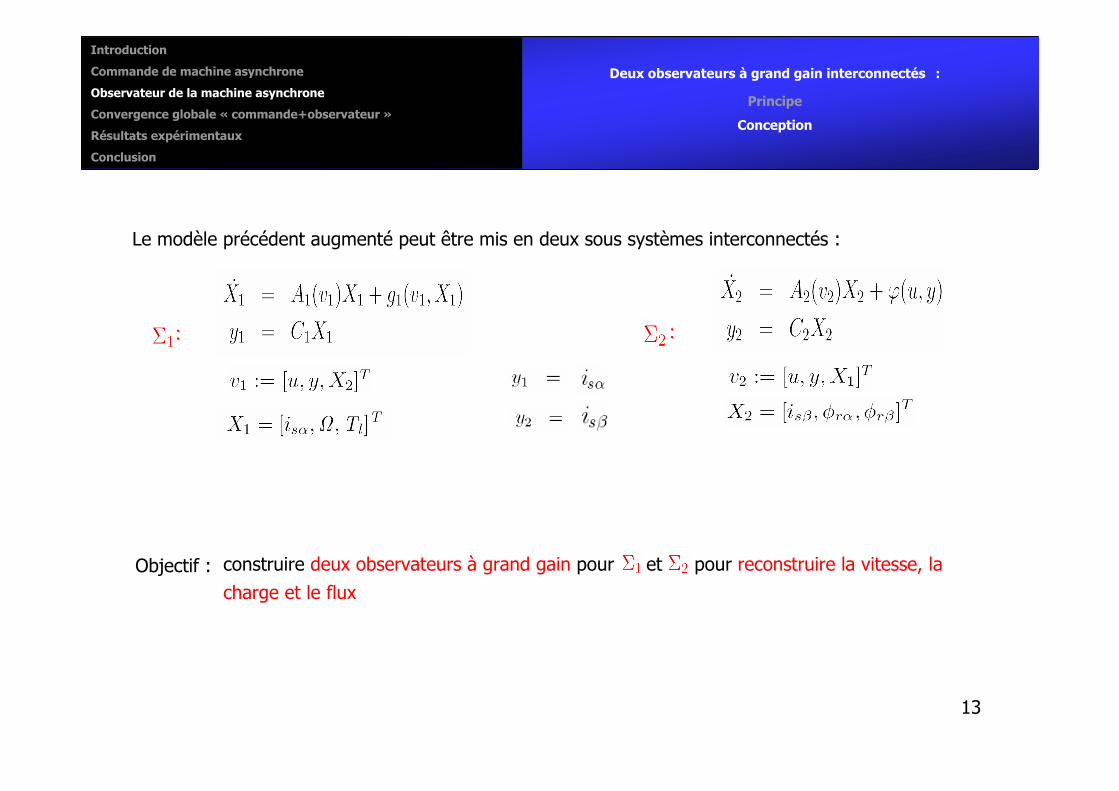
Objectif : construire deux observateurs à grand gain pour et pour reconstruire la vitesse, la
charge et le flux
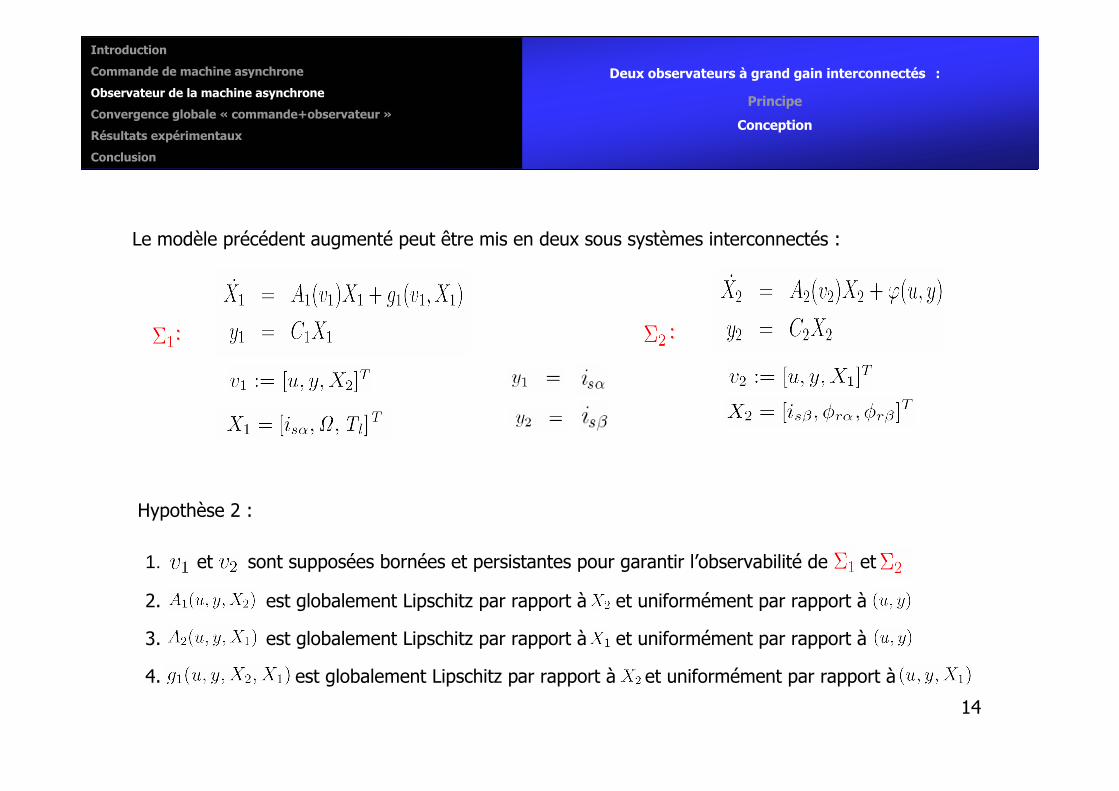
Le modèle précédent augmenté peut être mis en deux sous systèmes interconnectés :
:: ::
Deux observateurs à grand gain interconnectés :
Principe
Conception
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
14
Le modèle précédent augmenté peut être mis en deux sous systèmes interconnectés :
:: ::
4. est globalement Lipschitz par rapport à et uniformément par rapport à
1. et sont supposées bornées et persistantes pour garantir l’observabilité de et
2. est globalement Lipschitz par rapport à et uniformément par rapport à
3. est globalement Lipschitz par rapport à et uniformément par rapport à
Hypothèse 2 :
Deux observateurs à grand gain interconnectés :
Principe
Conception
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
15
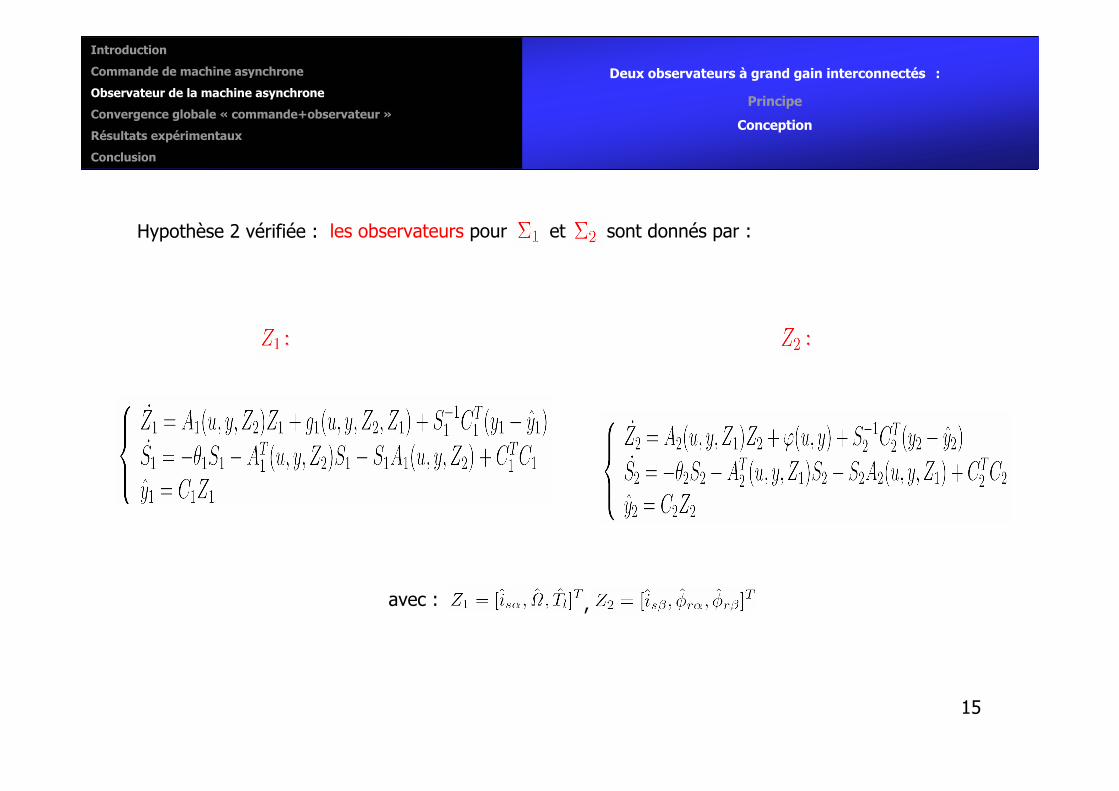
Hypothèse 2 vérifiée : les observateurs pour et sont donnés par :
:: ::
avec : ,
Deux observateurs à grand gain interconnectés :
Principe
Conception
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion

16
La vitesse et le flux sont alors donnés par l’observateur
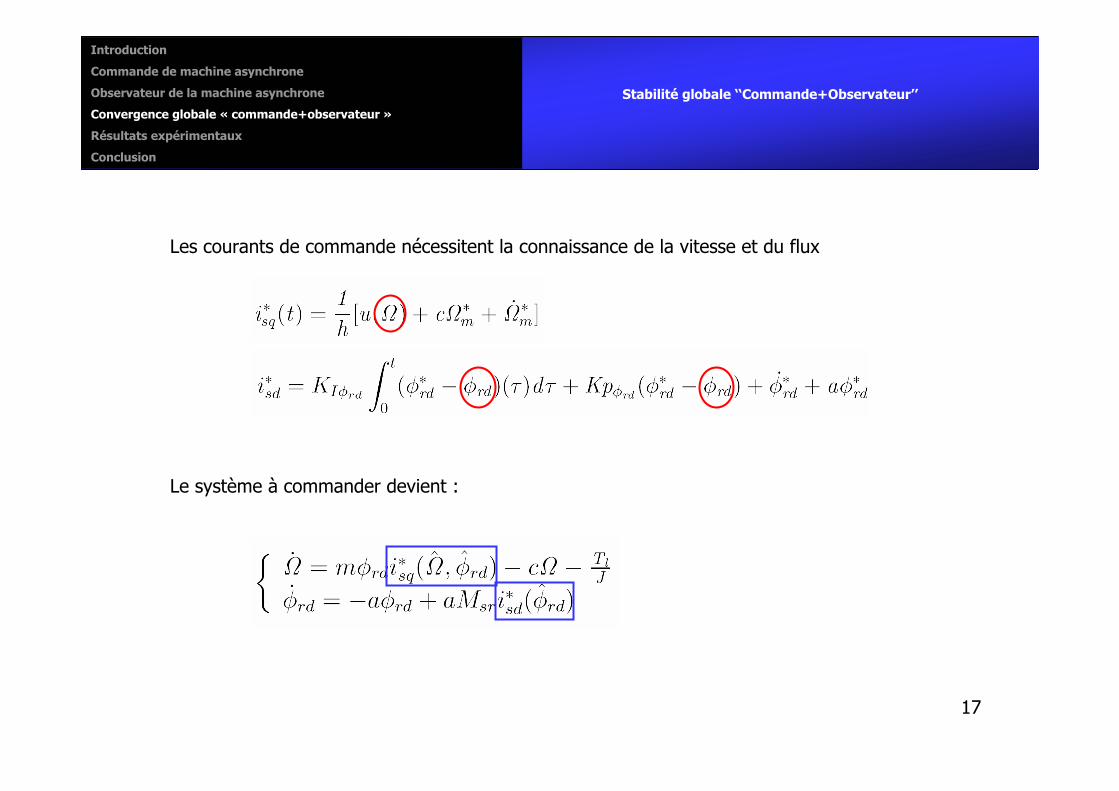
Les courants de commande nécessitent la connaissance de la vitesse et du flux
Stabilité globale ‘‘Commande+Observateur’’
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
17
Les courants de commande nécessitent la connaissance de la vitesse et du flux
Le système à commander devient :
Stabilité globale ‘‘Commande+Observateur’’
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
18
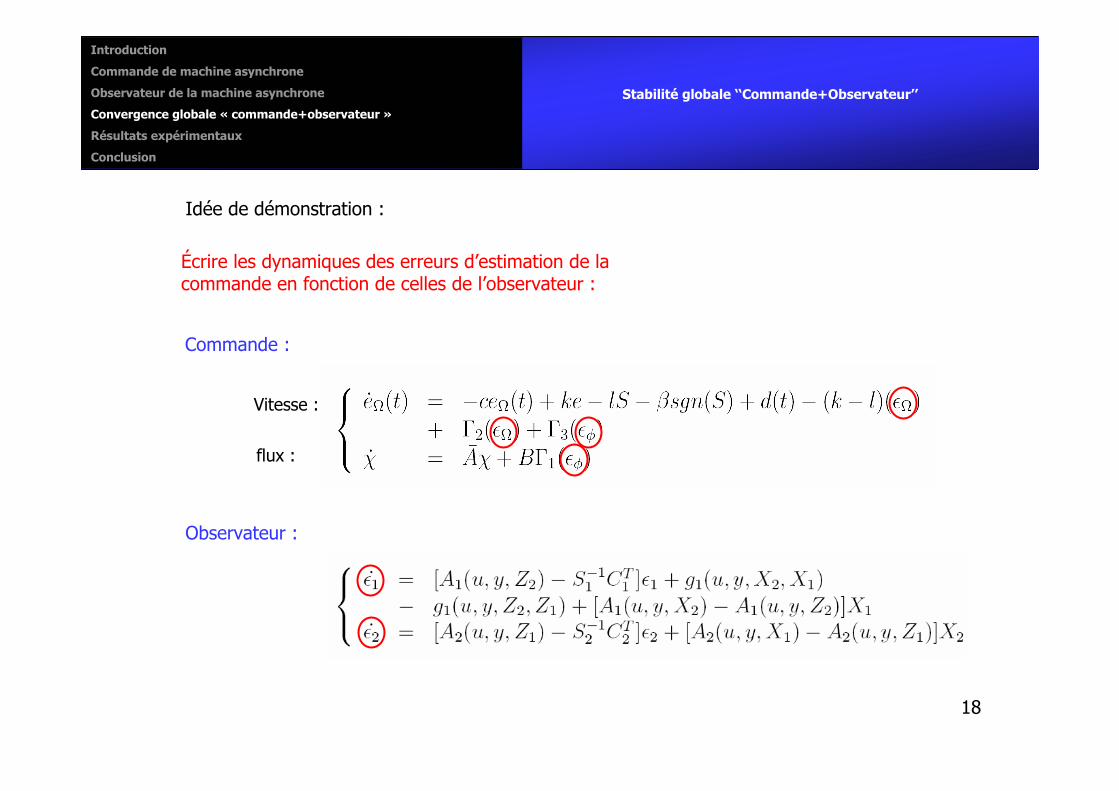
Idée de démonstration :
Commande :
Observateur :
Vitesse :
flux :
Écrire les dynamiques des erreurs d’estimation de la commande en fonction de celles de l’observateur :
Stabilité globale ‘‘Commande+Observateur’’Stabilité globale ‘‘Commande+Observateur’’
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion

19
Observateur
Soit la fonction quadratique candidate de Lyapunov :
Commande
La dérivée de V est :
On choisit , , de telle sorte que (positifs) la dérivée soit définie négative
=> Convergence asymptotique de l’erreur
Stabilité globale ‘‘Commande+Observateur’’
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
20
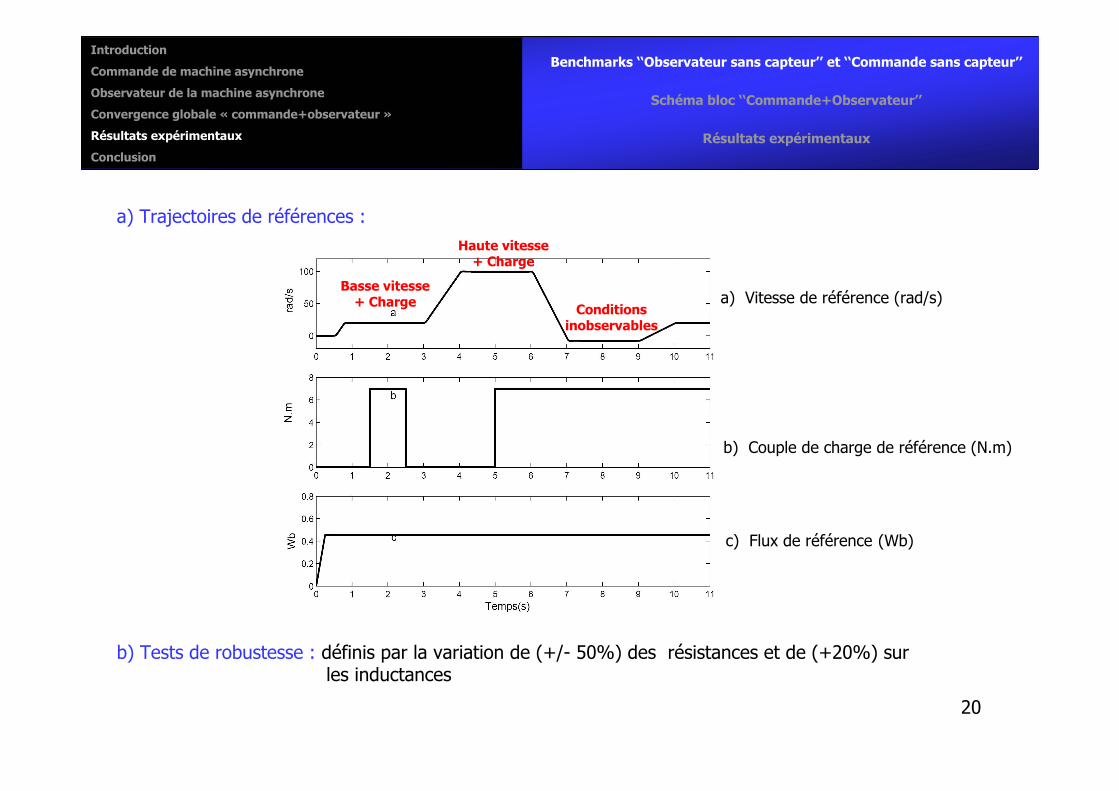
a) Trajectoires de références :
a) Vitesse de référence (rad/s)
b) Couple de charge de référence (N.m)
c) Flux de référence (Wb)
Basse vitesse + Charge
Haute vitesse + Charge
Conditions inobservables
b) Tests de robustesse : définis par la variation de (+/- 50%) des résistances et de (+20%) sur les inductances
Benchmarks ‘‘Observateur sans capteur’’ et ‘‘Commande sans capteur’’
Schéma bloc ‘‘Commande+Observateur’’
Résultats expérimentaux
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
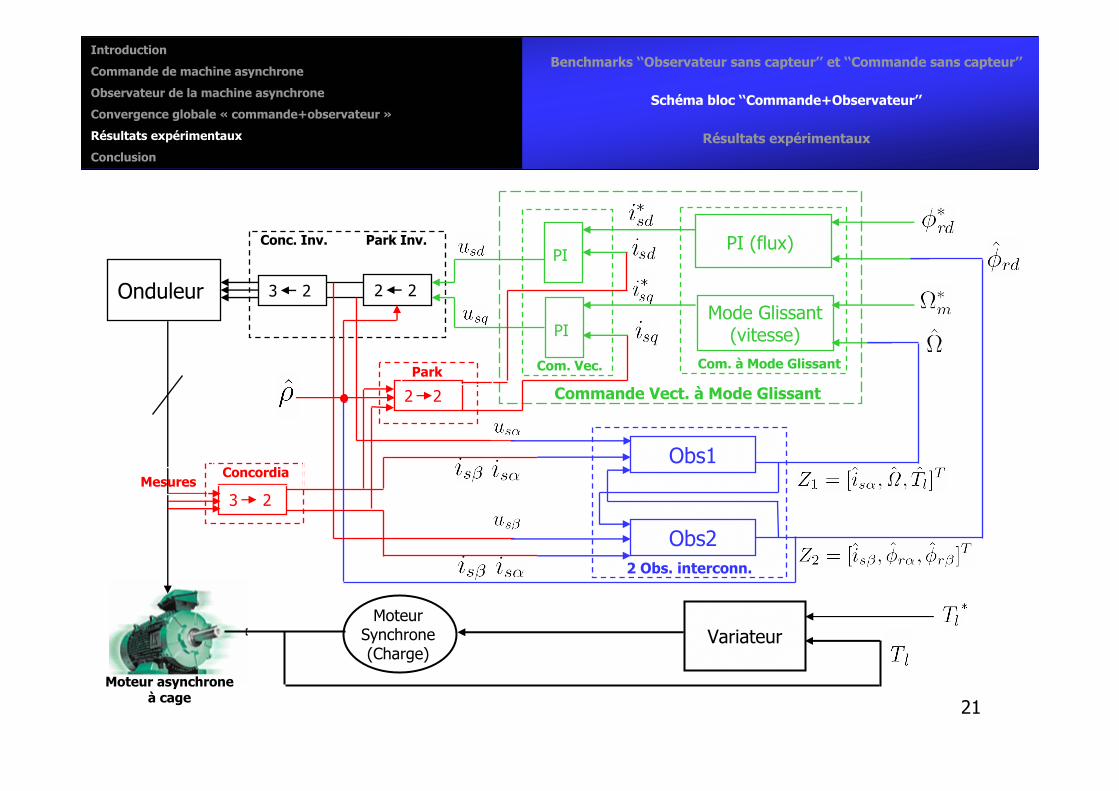
21
Moteur Synchrone (Charge)
Moteur asynchrone à cage
Benchmarks ‘‘Observateur sans capteur’’ et ‘‘Commande sans capteur’’
Schéma bloc ‘‘Commande+Observateur’’
Résultats expérimentaux
Conc. Inv. Park Inv.
Onduleur 3 2 2 2
PI
PIPI (flux)
Mode Glissant (vitesse)
Commande Vect. à Mode Glissant
Com. à Mode GlissantCom. Vec.
Variateur
2 2
Mesures
3 2
Concordia
Park
2 Obs. interconn.
Obs1
Obs2
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
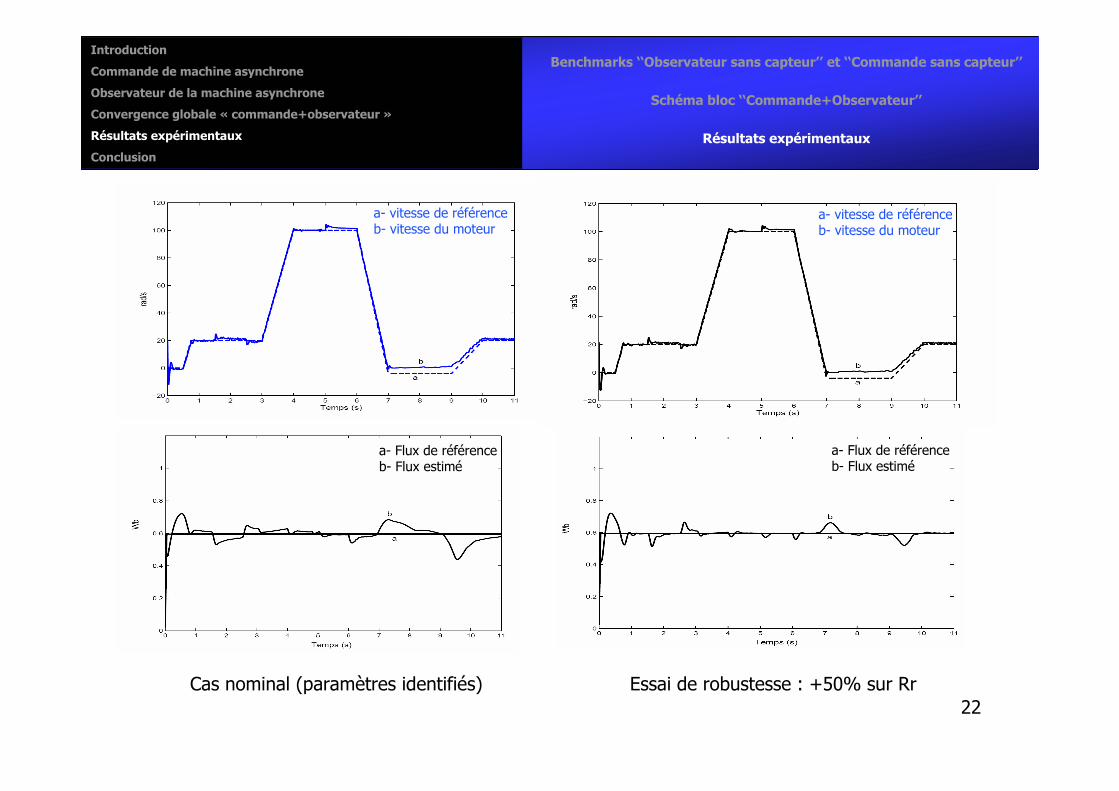
22
Le suivi de vitesse est bon dans les zones: basses et
hautes vitesses avec charge et dans les conditions
inobservables à 24 % de la charge nominale
a- vitesse de référence b- vitesse du moteur
a- Flux de référence b- Flux estimé
Même conclusion pour le flux
Essai de robustesse : +50% sur Rr
a- vitesse de référence b- vitesse du moteur
a- Flux de référence b- Flux estimé
Benchmarks ‘‘Observateur sans capteur’’ et ‘‘Commande sans capteur’’
Schéma bloc ‘‘Commande+Observateur’’
Résultats expérimentaux
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
Cas nominal (paramètres identifiés)
23
Conclusion
Introduction
Commande de machine asynchrone
Observateur de la machine asynchrone
Convergence globale « commande+observateur »
Résultats expérimentaux
Conclusion
� Conception d’une commande vectorielle à mode glissant sans capteur
mécanique (associée à un observateur de vitesse)
� Stabilité globale de l’ensemble ‘‘Commande + Observateur’’
� Validation expérimentale des performances de l’ensemble ‘‘Commande +
Observateur’’ sur le benchmark ‘‘Commande sans capteur’’ prenant en compte
le fonctionnement à basse vitesse de la MAS
� Un test de robustesse significatif ( variation de 50% sur Rr) montre la
qualité de la commande associée à l’observateur