Embed Size (px)
Citation preview
« Rapport de stage »
Contrôle non destructif par algorithme d'imagerie paramétrique non linéaire
Master Recherche Mécanique, Physique et Ingénierie (Spécialité Acoustique)
2008-2009
Par :
Amir Ershad FANAEI
Directeur de stage : M. Thierry SCOTTI
Remerciement
Je tiens à remercier tout particulièrement Monsieur Thierry SCOTTI de m’avoir proposé ce su-
jet de stage et de m’avoir apporté ses compétences scientifiques. Je souhaite également exprimer
ma profonde gratitude pour son aide et tous ses précieux conseils qu’il m’offre pendant ce stage.
Un grand remerciement également à Messieurs Emmanuel FRIOT et Djaffar BOUSSAA pour
m’avoir consacré du temps à la lecture de ce document en tant que rapporteur.
J’adresse mes remerciements à tous les membres de l’équipe Propagation et Imagerie (PI) de La-
boratoire de Mécanique et d’Acoustique et particulièrement à Monsieur Philippe LASAYGUES
, responsable de l’équipe.
Pour finir, je remercie également aux doctorants et post-doctorants de l’équipe et je n’oublie
évidemment pas les autres stagiaires.
1
Table des matières
I Introduction 3
II Rayonnement et diffraction d’onde 5
II.1 Equations de base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
II.2 Représentation du champ en ondes partielles . . . . . . . . . . . . . . . . . . . . 7
IIIProblèmes direct et inverse 9
III.1 Problèmes directs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
III.1.1 Méthode de Rayleigh-Fourier . . . . . . . . . . . . . . . . . . . . . . . . 10
III.1.2 Méthode ICBA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
III.2 Problème inverse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
III.2.1 Fonction coût . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
III.2.2 La fonction coût en Base et Haute fréquences . . . . . . . . . . . . . . . 16
III.3 Code de calcul PHILEAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
III.3.1 La configuration du milieu dans le code . . . . . . . . . . . . . . . . . . . 17
III.3.2 Le champ diffusé . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
III.4 Génération du bruit dans les mesures du champ diffusé . . . . . . . . . . . . . . 19
III.4.1 Génération synthétique de bruit . . . . . . . . . . . . . . . . . . . . . . . 20
III.4.2 Perturbation du champ diffus d’une cible . . . . . . . . . . . . . . . . . . 23
III.4.3 Reconstruction de l’objet avec l’erreur . . . . . . . . . . . . . . . . . . . 24
IV Perspective et Conclusion 25
I
Introduction
Il existe de nombreuses méthodes pour le CND (la recherche de défauts macroscopique) et pour
caractéristique globale de matériaux ou le milieu. Il faut reconnaître que s’il existe des méthodes
dominantes (par spécialité) à ce jour aucune n’est “idéale” (exempt de limitations, de défauts,
d’erreur d’interprétation, etc.).
Le premier objectif du stage est donc de faire un bilan de ces méthodes en faisant ressortir les
avantages et inconvénients ainsi que les domaines d’application (le rapport bibliographie).
Comme il n’y a pas de méthode générale, universelle, un des critères et donc la précision (du
résultat) et la souplesse d’utilisation d’une méthode (facilité d’adaptation à des configurations
proches de celle pour laquelle la méthode a été développée).
Dans ce cadre, il existe un algorithme particulièrement “simple” et facilement adaptable à de
nombreuses configurations : identification (ou imagerie) paramétrique itérative (non linéaire car
les solutions ne s’expriment pas comme une fonction linéaire des données).
Par rapport à la tomographie (conçurent direct / méthodes US) :
– Pas de limite en terme de contraste (entre les milieux de propagation)
– Pas de limite en terme de fréquences (utilisable des BF aux HF)
– Imagerie quantitative (tomo : qualitatif)
– Mais pas d’image du domaine au sens «pixel»(seulement reconstruction des valeurs de
paramètre qui caractérisent le domaine)
3
Donc, ça pourrait être l’algorithme idéal s’il n’y avait pas un (trois) gros défaut(s) : c’est (en
terme mathématique) un problème mal posé ! (le rapport bibliographie)
Pour pallier à ce défaut (problème mal posé) il existe des parades, notamment une, la plus
développée dans la littérature qui est la pénalisation. Mais cela revient à incorporer de l’infor-
mation à priori sur la cible et son environnement et donc à supposer qu’on connaît déjà (en
partie) ce que l’on cherche à déterminer.
L’objet de ce stage - et d’une partie des recherche de l’équipe PI - est donc de proposer une
alternative à ces méthodes de pénalisation qui est de sujet du chapitre III.
En particulier, il s’agit d’analyser les avantages d’une approche multifréquences pour la sta-
bilisation de l’inversion, le problème de l’unicité est ayant déja été plus ou moins traité [5]
[2].
Finalement, le dernier chapitre est consacré à la conclusion et perspective de ce travail.
4
II
Rayonnement et diffraction
d’onde
La propagation des ondes est l’évolution d’une onde, ou du mouvement d’une particule dans
le temps et l’espace, par rapport à un milieu. C’est la raison pour laquelle, une connaissance
approfondie de milieu est indispensable pour décrire les comportements des ondes acoustiques
dans l’imagerie ultrasonore.
5

II.1. Equations de base
II.1 Equations de base
Un rappel des équations de base et des représentations du champ est fait.
Ω1
Ω0
Figure II.1 : Le schéma général de surface de mesure (Γb) et de l’objet (Ω1)
Le problème à résoudre en acoustique est le suivant : un objet est éclairé par une onde incidente
pi(x) et diffracte sur le domaine Ω0. Des ondes diffractées pd(x) sont mesurées sur la surface de
mesure de champ diffracté Γb.
Le champ total est le champ incident plus le champ diffracté :
p(x) = pi(x) + pd(x) (II.1)
Le champ incident c’est une onde plane sous la forme :
pi(x) = e−ik0r cos(θ−θi) (II.2)
Le contour de l’objet est définit par la courbe :
Γ : r = ρ(θ) (II.3)
pi et pd satisfont l’équation d’Helmholtz dans le domaine extérieur Ω0 :
(∆ + k20)p(x) = 0 ; ∀x ∈ Ω0 (II.4)
Avec les conditions aux limites entre les milieux Ω0 et Ω1 ainsi que la condition de rayonnements
Sommerfeld lorsque Ω0 n’est pas borné :
p1(x) − p0(x) = 01ρ1
∂np1(x) − 1ρ0
∂np0(x) = 0
Sommerfeld kr → ∞
(II.5)
6

II.2. Représentation du champ en ondes partielles
Ces équations sont à résoudre à la fois pour le problème direct et le problème inverse mais :
en Problème Direct : Γ , ρ et k0 sont connus et une p est cherché qui satisfait tous ces
équations
en Problème Inverse : p est connu pour un certain nombre de points et on suppose ρ0, pi(x)
et θi aussi sont connus et Γ , ρ1 sont cherché
II.2 Représentation du champ en ondes partielles
Une autre forme de la représentation du champ en équations intégrales de surface (en tous
points équivalentes)
Considérons le cas où l’obstacle est constituée par un cylindre pénétrable de forme complexe
(non forcément circulaire), dont les génératrices sont parallèles à l’axe O − z du système de
coordonnées (Oxyz)(le figure II.2).
Figure II.2 : Configuration de l’obstacle
Le point de départ est l’équation :
HΩ0(x′)p0(x
′) = pi(x′) +
∫
Γ
[G0(x′,x)ν.∇p0(x
′) − p0(x′)ν.∇G0(x
′,x)] dγ(x) (II.6)
On note en particulier que
– x′ désigne un point de Ω0 (i.e., le point “d’observation”)
– x désigne un point qui décrit la surface Γ du diffuseur
Dans un système de coordonnées polaires (r, ϕ), la fonction de Green s’écrit :
Gj(x′,x) =
i
4
∞∑
n=−∞
[H(r − r′)H(1)
n (kjr)Jn(kjr′) + H(r′ − r)H(1)
n (kjr′)Jn(kjr)
]ein(ϕ′
−ϕ) (II.7)
7

II.2. Représentation du champ en ondes partielles
avec
∂ν =1
S
(τ
τ∂ϕ − τ∂r
)
S = S(ϕ) =
√
τ 2 + τ 2
τ =∂τ
∂ϕ
dγ(x) = S(ϕ) dϕ
H(ξ) =
1 si ξ > 0
0 si ξ < 0
Jn est la fonction de Bessel d’ordre n et H(1)n la fonction de Hankel de première espèce et d’ordre
n.
• Soit x′ ∈ Ω+
0 , alors, |x′| > |x| et
Figure II.3 : Sous espace Ω+j et Ω
−
j
G0(x′,x) =
i
4
∞∑
n=−∞
[H(1)
n (kjr′)Jn(kjr)
]ein(ϕ′
−ϕ) (II.8)
On déduit la représentation du champ dans Ω+0 :
p0(x′) = pi(x′) +
∞∑
n=−∞
anH(1)n (k0r
′)einϕ′
∀x′ ∈ Ω+0 (II.9)
En convenant de poser,
an =i
4
∫
Γ
Jn(k0τ)∂νp0(x) −1
S
[
−inτ
τJn(k0τ) − k0τ Jn(k0τ)
]
p0(x)
e−inϕdγ(x) (II.10)
8
III
Problèmes direct et inverse
III.1 Problèmes directs
Le problème direct est au coeur du processus d’inversion et c’est sa résolution qui “pilote” la
qualité des reconstructions.
Pour générer les données, on utilise la méthode la méthode Rayleigh-Fourier décrite ci-après.
Pendant l’inversion, le problème direct est résolu avec la méthode ICBA décrite ci-après.
9

III.1. Problèmes directs
III.1.1 Méthode de Rayleigh-Fourier
On a vu dans le cas d’une représentation du champ en ondes partielles ch.II.2 que le champ de
pression s’écrit,
p0(x′) = pi(x′) +
∞∑
n=−∞
anH(1)n (k0r
′)einϕ′
∀x′ ∈ Ω+0 (III.1)
avec les coefficients an donnés par II.10. On se place dans le cas de condition aux limites de
type Dirichlet (p = 0 sur Γ) Eqs.(II.5).
D’un point de vue mathématique les séries infinies convergent dans Ω+0 [6] mais délimitant en
général, dans Ω−
0 . La procédure dite de Rayleigh-Fourier consiste à invoquer l’hypothèse de
Rayleigh rencontrée auparavant. Son introduction dans les conditions aux limites suivie d’une
projection sur une base de Fourier, i.e. on projet les conditions aux limites (ici Dirichlet) sur
une base de Fourier [1].
Cette méthode nous a permis de simuler des ”mesures” du champ diffracté, mesures que nous
avons par la suite introduites comme données du problème inverse.
0 = pi(ρ(θ), θ) +∞∑
n=−∞
anH(1)n (k0ρ(θ))einθ (III.2)
On pose,
Gmn =
∫ 2π
0
H(1)n (k0ρ(θ))ei(n−m)θ dθ (III.3)
dm = −
∫ 2π
0
pi(ρ(θ), θ)e−imθ dθ (III.4)
Ga = d (III.5)
Le calcul des coefficients a se fait l’inversant la matrice G
III.1.2 Méthode ICBA
La méthode ICBA (Intersecting Canonicale Body Approximation) a été développée au L.M.A.
par A. Wirgin [4] [3] Cette approximation repose sur l’hypothèse que la réponse de l’objet réel
est comparable à la réponse d’un cylindre circulaire de rayon égal au rayon local de l’obstacle
dans la direction considérée (le figure III.1).
an = −(−i)n Jn(ka)
H(1)n (ka)
e−inθi
(III.6)
10
III.2. Problème inverse
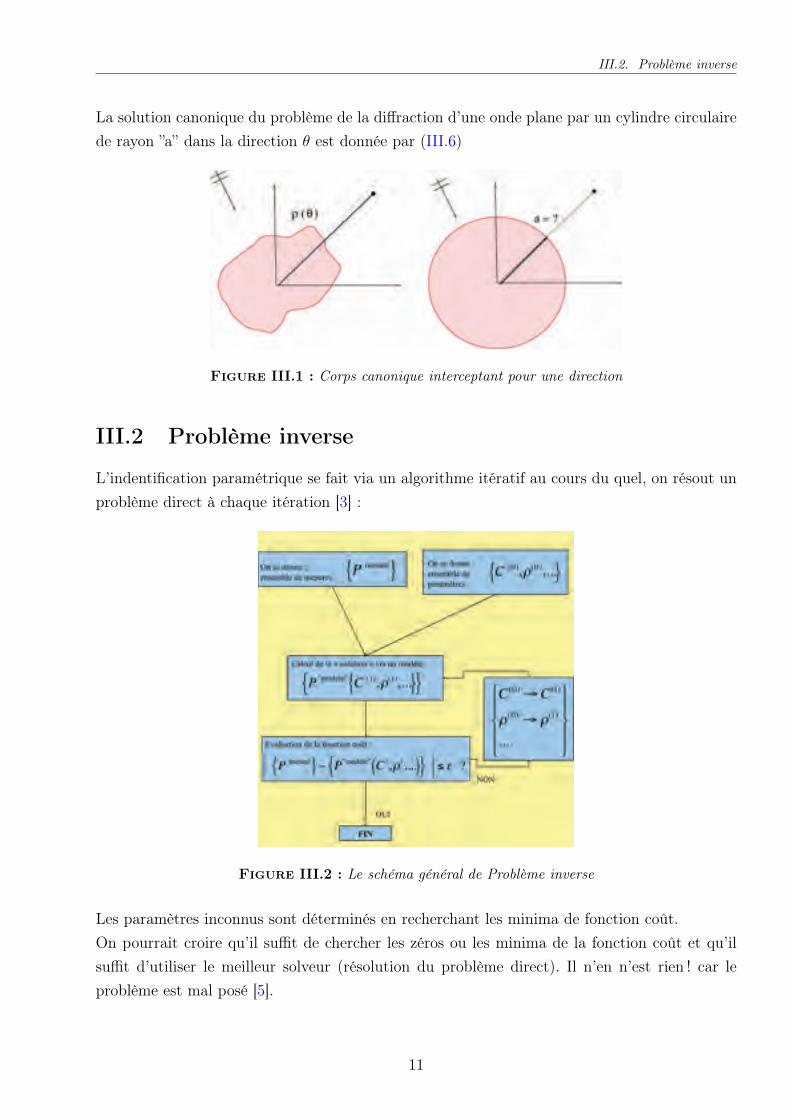
La solution canonique du problème de la diffraction d’une onde plane par un cylindre circulaire
de rayon ”a” dans la direction θ est donnée par (III.6)
Figure III.1 : Corps canonique interceptant pour une direction
III.2 Problème inverse
L’indentification paramétrique se fait via un algorithme itératif au cours du quel, on résout un
problème direct à chaque itération [3] :
Figure III.2 : Le schéma général de Problème inverse
Les paramètres inconnus sont déterminés en recherchant les minima de fonction coût.
On pourrait croire qu’il suffit de chercher les zéros ou les minima de la fonction coût et qu’il
suffit d’utiliser le meilleur solveur (résolution du problème direct). Il n’en n’est rien ! car le
problème est mal posé [5].
11
III.2. Problème inverse
Quelque soit la façon de résoudre le problème direct (pendant l’inversion), il est illusoire d’es-
sayer d’obtenir une solution satisfaisante tant que le problème de stabilité et de non-unicité
n’est pas maîtrise.
Il y a 3 sources d’erreur qui engendre l’instabilité :
• Des erreurs de mesures (il y a toujours des incertitudes de mesure expérimentale sur le
champ diffracté)
• Des erreurs de modèles (il y a des erreurs sur chaque représentation de champ pour établir
l’Equations d’Etat (problème direct))
• Des erreurs de paramètres qui sont supposées connus (il y a toujours des incertitudes sur
les valeurs de densité (ρ) et sur la célérité (c) du milieu extérieur par exemple)
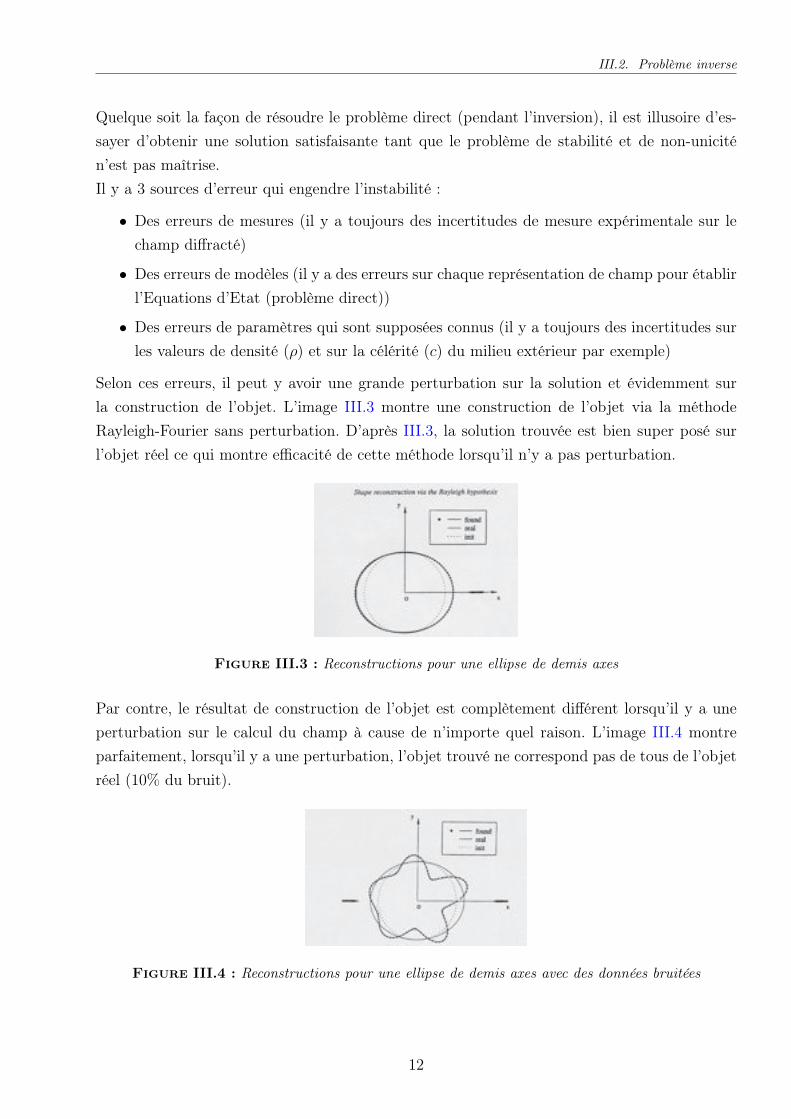
Selon ces erreurs, il peut y avoir une grande perturbation sur la solution et évidemment sur
la construction de l’objet. L’image III.3 montre une construction de l’objet via la méthode
Rayleigh-Fourier sans perturbation. D’après III.3, la solution trouvée est bien super posé sur
l’objet réel ce qui montre efficacité de cette méthode lorsqu’il n’y a pas perturbation.
Figure III.3 : Reconstructions pour une ellipse de demis axes
Par contre, le résultat de construction de l’objet est complètement différent lorsqu’il y a une
perturbation sur le calcul du champ à cause de n’importe quel raison. L’image III.4 montre
parfaitement, lorsqu’il y a une perturbation, l’objet trouvé ne correspond pas de tous de l’objet
réel (10% du bruit).
Figure III.4 : Reconstructions pour une ellipse de demis axes avec des données bruitées
12
III.2. Problème inverse
III.2.1 Fonction coût
Nous avons montré dans la figure III.2 que le problème inverse finalement est résolu par une
fonction coût. La difficulté qu’on a rencontré pendant l’inversion est la “discrimination” des
solutions générées parmi l’ensemble des minima que possède cette fonction coût. Dans cette
partie en essai d’écrit la fonction coût qui permet de déterminer le contour d’un objet par la
méthode Rayleigh-Fourier [4].
La fonction coût mono fréquence
La fonction coût mono fréquence se montre sous la forme :
F =
∣∣∣∣∣∣∣
Pmesuré(f0) − P calculé(f0)︸ ︷︷ ︸
modèle
∣∣∣∣∣∣∣
(III.7)
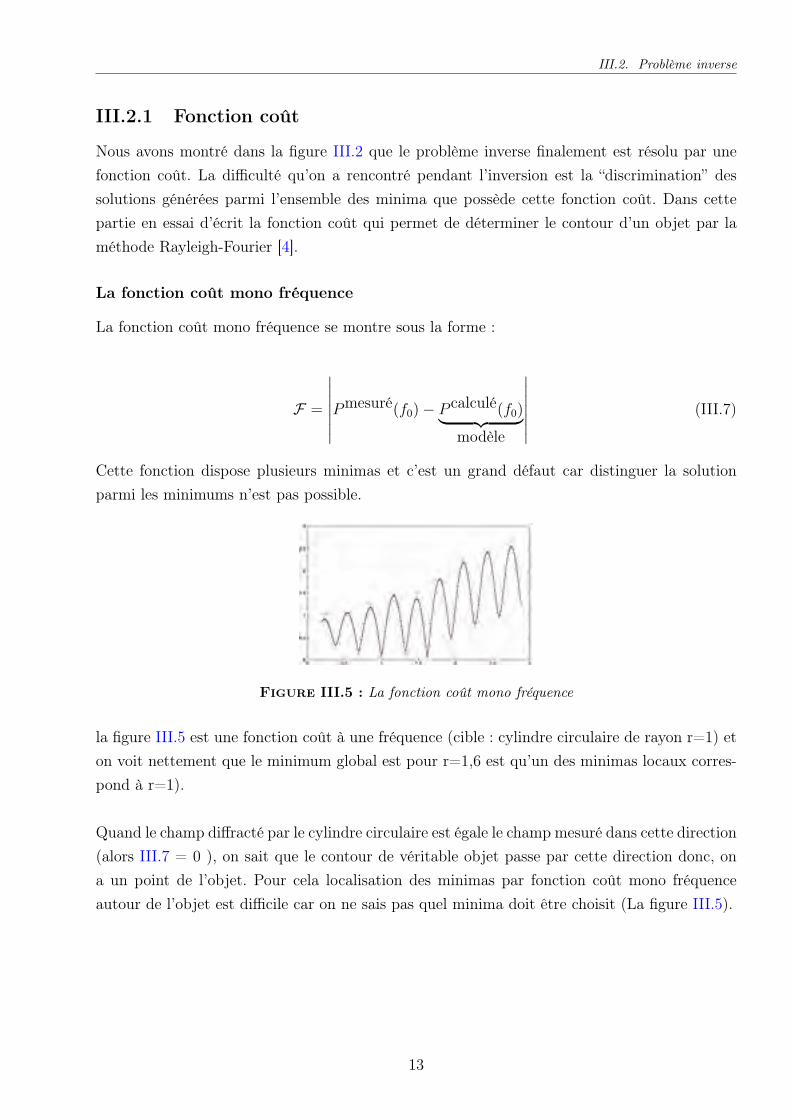
Cette fonction dispose plusieurs minimas et c’est un grand défaut car distinguer la solution
parmi les minimums n’est pas possible.
Figure III.5 : La fonction coût mono fréquence
la figure III.5 est une fonction coût à une fréquence (cible : cylindre circulaire de rayon r=1) et
on voit nettement que le minimum global est pour r=1,6 est qu’un des minimas locaux corres-
pond à r=1).
Quand le champ diffracté par le cylindre circulaire est égale le champ mesuré dans cette direction
(alors III.7 = 0 ), on sait que le contour de véritable objet passe par cette direction donc, on
a un point de l’objet. Pour cela localisation des minimas par fonction coût mono fréquence
autour de l’objet est difficile car on ne sais pas quel minima doit être choisit (La figure III.5).
13

III.2. Problème inverse
Figure III.6 : Localisation des minima de la fonction coût dans toutes les directions autour de l’objet
Jusqu’à présent la solution était en pénalité car le choix de η est difficile dans la relation III.8
et cette choix est tout un art. Pour trouver η, il faut incorporer et approprier des informations
par rapport à chaque application.
F =
∣∣∣∣∣∣∣
Pmesuré(f0) − P calculé(f0)︸ ︷︷ ︸
modèle
∣∣∣∣∣∣∣
+ η ‖l‖ (III.8)
Pour cela, on propose une solution alternative similaire avec un choix unique pour η (une fois
pour toute).
La fonction coût multi fréquence
On repart encore sur la relation (III.8) mais cette fois on choisit η = 1. En choisissant η = 1
et l =∑
j
∣∣∣Pmesuré(fj) − P calculé(fj)
∣∣∣, on peut écrire la fonction coût multi fréquence sous
la forme :
F =∣∣∣Pmesuré(f0) − P calculé(f0)
∣∣∣ + 1
∑
j
∣∣∣Pmesuré(fj) − P calculé(fj)
∣∣∣ (III.9)
D’après la relation (III.9), on va trouvé juste un minima globale qui est la solution de notre
fonction coût.
14

III.2. Problème inverse
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
1.2
1.4
1
2
3
4
5
6
7
8
9
10
11
Figure III.7 : La fonction coût multi fréquence
La fonction coût montrée sur la figure III.7 est une fonction coût multi fréquences et on voit
très bien qu’il existe juste un minima qui va nous donner un point de l’objet dans une direc-
tion donnée (la courbe bleu). Dans cette figure, plusieurs fonctions coût mono fréquences sont
affichées et elles montrent qu’il y a plusieurs minimas pour une fonction coût mono fréquence.
C’est la raison pour laquelle, on préfère travailler avec la fonction coût multi fréquence.
Justification
On a montré sur le plan théorique [2] [5] que le minimum recherché ne varie pas quand on
change la fréquence. Donc la première approche consiste à comparer les fonctions coût à 2
fréquences et à retenir que le minimum qui ne varie pas dans la position (la figure III.8).
C’est-à dire, pour discriminer la solution pour chaque angle il faut résolu le problème inverse au
moins 2 fois car on a toujours le problème de non-unicité des solutions et on trace la fonction
coût et on prend la minimum que bouge pas.
Figure III.8 : Résolution de problème inverse pour discriminer la solution
A partir de cette constatation, on se rencontre que si on fait la somme des fonctions coût, on
va obtenir une fonction coût avec un minimum prononcé.
15

III.2. Problème inverse
Le stage
On a montré que le problème de non-unicité est résolu et l’objectif de ce stage est de concentré
sur le problème de stabilité (la deuxième caractéristique de problème mal posé).
III.2.2 La fonction coût en Base et Haute fréquences
Il existe un autre paramètre influent sur le comportement de fonction coût. La fonction coût
en haute fréquence expose plusieurs minimums (le figureIII.9).
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.0180
0.01
0.02
0.03
0.04
0.05
0.06
0.07Cost functions; θ = 0
Figure III.9 : La fonction coût en haute fréquence
On voit clairement sur la figure qu’à haute fréquence identification devient plus difficile mais
par contre les minima sont bien localisé.
Par contre en base fréquence, la fonction coût expose juste un minima (le figureIII.10).
0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7
x 10−5
0
1
2
x 10−4 Cost functions; θ=0
Freq 650.000HzFreq 700.000HzFreq 750.000Hz
Figure III.10 : La fonction coût en haute fréquence
On voit qu’à base fréquence identification est plus facile (meilleurs stabilité et un seul minimum),
par contre ce minimum est moins bien localisé qu’à haute fréquence.
16
III.3. Code de calcul PHILEAS
III.3 Code de calcul PHILEAS
Le code de calcul PHILEAS est un algorithme qui résout des problèmes direct et inverse pour
une cible composite en espace libre éclairée par une onde plane incidente. Ce code est écrit par
M. Thierry SCOTTI et il est composé de 2 parties complètement différentes et indépendantes.
Problème direct : représentation en ondes partielles méthode de Rayleigh-Fourrier en champ
proche
Problème inverse : fonctions cout mono fréquence ou multifréquences méthode ICBA
La spécificité de ce code est à la fois sa souplesse (on peut changer la méthode de résolution
problème inverse) et à la fois sa rapidité (on calcule une fois le problème direct).
III.3.1 La configuration du milieu dans le code
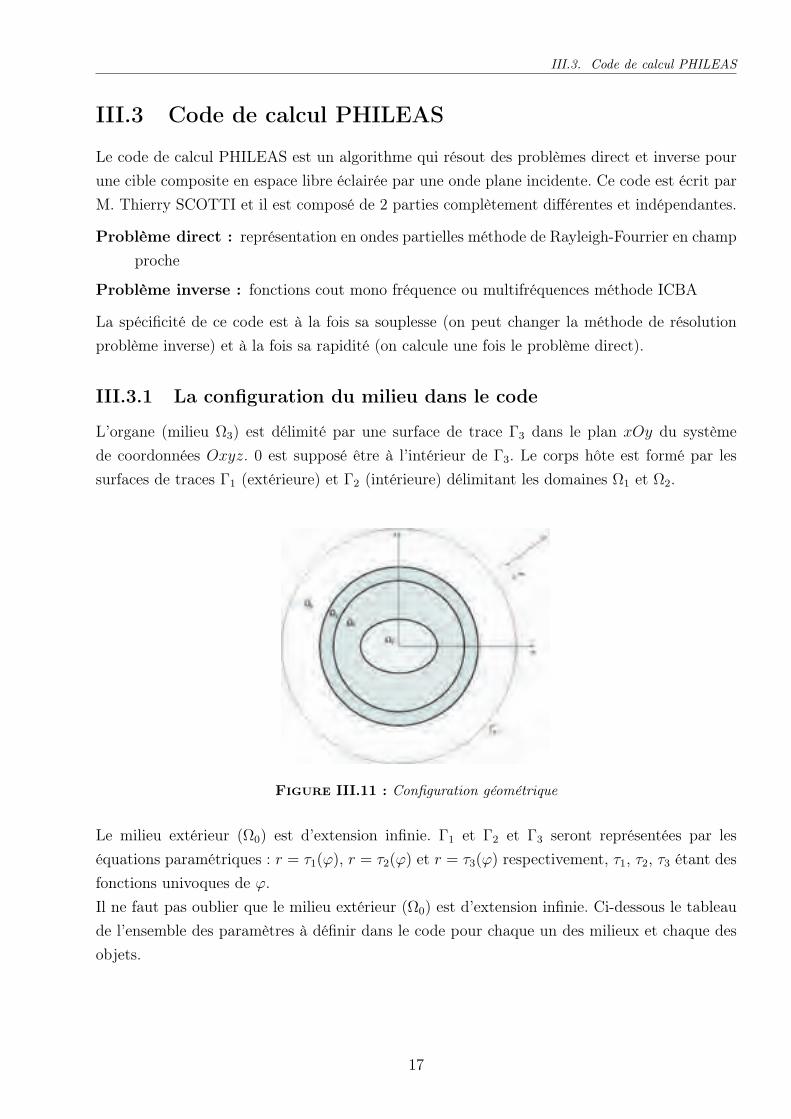
L’organe (milieu Ω3) est délimité par une surface de trace Γ3 dans le plan xOy du système
de coordonnées Oxyz. 0 est supposé être à l’intérieur de Γ3. Le corps hôte est formé par les
surfaces de traces Γ1 (extérieure) et Γ2 (intérieure) délimitant les domaines Ω1 et Ω2.
Figure III.11 : Configuration géométrique
Le milieu extérieur (Ω0) est d’extension infinie. Γ1 et Γ2 et Γ3 seront représentées par les
équations paramétriques : r = τ1(ϕ), r = τ2(ϕ) et r = τ3(ϕ) respectivement, τ1, τ2, τ3 étant des
fonctions univoques de ϕ.
Il ne faut pas oublier que le milieu extérieur (Ω0) est d’extension infinie. Ci-dessous le tableau
de l’ensemble des paramètres à définir dans le code pour chaque un des milieux et chaque des
objets.
17

III.3. Code de calcul PHILEAS
pb direct pb inv
r1 1.0 1.0
r2 0.8 0.8
r3 0.6 0.2≤ X1 ≤0.8
a0 1.0 1.0
a1 1.0 1.0
a2 1.0 1.0
a3 1.0 1.0
b0 0.001 0.001
b1 0.001050 0.001050
b2 0.0009447 0.0009447
b3 0.0009328 ...≤ X2 ≤...
k0 1.5 1.5
k1 1.6071 1.6071
k2 1.5517 1.5517
k3 3.0307 3.0307
III.3.2 Le champ diffusé
La représentation du champ en ondes partielles est :
p0(x′) = pi(x′) +
∞∑
n=−∞
anH(1)n (k0r
′)einϕ′
∀x′ ∈ Ω+0 (III.10)
Pour des raisons numérique on limite le nombre de terme à N .
Ce champ de pression calculé dans le code est sous la forme :
18
III.4. Génération du bruit dans les mesures du champ diffusé
SUBROUTINE CHAMPS(tetai,teta,rb,dim,hb,An,sum)
IMPLICIT NONE
INTEGER : : dim
INTEGER : : m1,nn,n2
DOUBLE PRECISION : : tetai,teta,rb
COMPLEX(kind=8) : : An(-200 :200)
COMPLEX*16 : : hb(200)
COMPLEX(kind=8) : : sum
sum=(0.0D0,0.0D0)
DO nn=-dim,dim
n2=IABS(nn)
m1 = 1
IF (nn.lt.0) THEN
m1 = powerm1(nn)
END IF sum=sum+m1*An(nn)*hb(n2+1)*CDEXP((0.0D0,1.0D0)*nn*teta)
END DO
END SUBROUTINE CHAMPS
III.4 Génération du bruit dans les mesures du champ dif-
fusé
Pour tester la stabilité des algorithmes numériques d’inversion, ainsi que pour simuler de façon
plus réaliste des mesures expérimentales du champ diffusé, nous avons introduites du bruit,
i.e., une erreur aléatoire, sur les valeurs du champ diffusé introduites comme données dans
l’algorithme d’inversion. Donc, on a besoin d’un nombre aléatoire pour construire le bruit.
Nombre aléatoire
Pour construire un nombre aléatoire en Fortran 90, il y a un sous-programme normalisé pour
générer une série de nombres aléatoires (RANDOM_NUMBER).
Cette fonction crée un nombre aléatoire entre 0 ≤ x < 1 à chaque nouvel appel mais cette
fonction produit même nombre aléatoire chaque fois qu’on lance le code. Pour cela, nous avons
besoin de générer des séries différentes lors d’exécutions successives qui génère automatique-
ment une nouvelle série différente de la précédente.
Il existe des routines dans des ressources en informatique Scientifique qui marchent plus ou
19

III.4. Génération du bruit dans les mesures du champ diffusé
moins bien car chaque routin est écrit pour une application spéciale. Les différentes routines de
Fortran sont essaies et finalement nous avons trouvés une fonction intrinsèque de Fortran qui
réinitialise lors d’exécutions successives. Ce générateur de nombres aléatoires s’appelle “RAN-
DOM_SEED()” et il est initialisé d’une manière dépendant des options du système (la date et
l’heure).
CALL RANDOM_SEED()
CALL RANDOM_NUMBER(r)
rand = 2D0*(r-0.5D0)
Le nombre aléatoire r sera construit par Fortran 95 et il est un nombre entre 0 et 1 mais on
a besoin d’un nombre aléatoire entre 1 et −1 pour perturbé le champ diffusé. Pour cela, on va
former le nombre aléatoire rand par la relation rand = 2D0 ∗ (r − 0.5D0) qui va nous données
−1 ≤ x < 1
III.4.1 Génération synthétique de bruit
Détaillons la procédure utilisée pour générer erreur aléatoire dans les valeurs numériques du
champ diffusé.
Soit u(ϕ) une valeur exacte du champ diffusé dans la direction ϕ. On traite séparément parties
réelles et imaginaires de u(ϕ).
• On détermine minimum et maximum des valeurs prises par le champ diffusé. soient
urmin = min Re u(ϕ) 0 < ϕ < 2π
urmax = max Re u(ϕ) 0 < ϕ < 2π
uimin = min Im u(ϕ) 0 < ϕ < 2π
uimax = max Im u(ϕ) 0 < ϕ < 2π
• On génère de façon aléatoire N nombres entre −1 et 1
Nous avons ajouter les boucles IF-END au code PHILEAS pour trouver les minimums et
maximums absolu de u(ϕ) parmie les valeur du champ diffusé (qui est un vecteur).
Selon les minimums et maximums absolus et le nombre aléatoire “rand” qu’on a trouvé, le bruit
est sous la forme :
rendrel = rand ∗ ((urmax − ur
min) /2) ∗ br (III.11)
rendimag = rand ∗((
uimax − ui
min
)/2
)∗ br (III.12)
d’où, br est le pourcentage d’erreur qu’on commet comme erreur (soit en mesures, en modèle
ou en paramètres initiales). Le valeur br est un valeur connus qu’il va ajouter au bruit.
20
III.4. Génération du bruit dans les mesures du champ diffusé
Finalement, le champ perturbé u∗(ϕ) est alors :
u∗(ϕ) = Re u(ϕ) ∗ rendrel + Im u(ϕ) ∗ rendimag (III.13)
Pour montrer l’influence du bruit sur le champ, on va étudier une application simple (une ellipse
immergée dans l’eau).
Ci-dessous la partie de code qui réalise cette étape :
21
III.4. Génération du bruit dans les mesures du champ diffusé
SUBROUTINE CHAMPS_P_ER(npoint,k,br,sumv,sumv_p_er)
IMPLICIT NONE
INTEGER : : dim
INTEGER : : m1,nn,n2,k
INTEGER : : npoint,npoint2
DOUBLE PRECISION : : harvest,rand,rand1,rand2,bb
DOUBLE PRECISION : : min_real,max_real,min_imag,max_imag,
erreur_real,erreur_imag,max_r,min_r,max_i,min_i
DOUBLE PRECISION : : tetai,teta,rb,br,er,erreur
COMPLEX(kind=8) : : An(-200 :200)
COMPLEX*16 : : hb(200)
COMPLEX(kind=8) : : sum, sumv(0 :360)
COMPLEX(kind=8) : : sumv_p_er(0 :360)
REAL : : r
npoint2 = npoint-1
br = 0.05D0
erreur = 0.0D0
max_r = DREAL(sumv(0))
min_r = DREAL(sumv(0))
max_i = DIMAG(sumv(0))
min_i = DIMAG(sumv(0))
DO k = 0 , Npoint-1
IF (DREAL(sumv(k)) > max_r) THEN
max_r=DREAL(sumv(k))
END IF
IF (DREAL(sumv(k)) < min_r) THEN
min_r=DREAL(sumv(k))
END IF
22
III.4. Génération du bruit dans les mesures du champ diffusé
IF (DIMAG(sumv(k)) > max_i) THEN
max_i=DIMAG(sumv(k))
END IF
IF (DIMAG(sumv(k)) < min_i) THEN
min_i=DIMAG(sumv(k))
END IF
END DO
max_real = max_r
min_real = min_r
max_imag = max_i
min_imag = min_i
CALL RANDOM_SEED()
DO k = 0 , Npoint-1
CALL RANDOM_NUMBER(r)
rand = 2D0*(r-0.5D0)
rand1 = rand * ((max_real - min_real)/2)*br
rand2 = rand * ((max_imag - min_imag)/2)*br
sumv_p_er(k)= (DREAL(sumv(k))+rand1)+((0.0D0,1.0D0)
*DIMAG(sumv(k))+rand2)
END DO
END SUBROUTINE CHAMPS_P_ER
III.4.2 Perturbation du champ diffus d’une cible
Après avoir calculé le champ diffracté par la méthode Rayleigh-Fourier (problème direct), on
va appliquer le bruit qui est construit dans la section précédant sur ce champ.
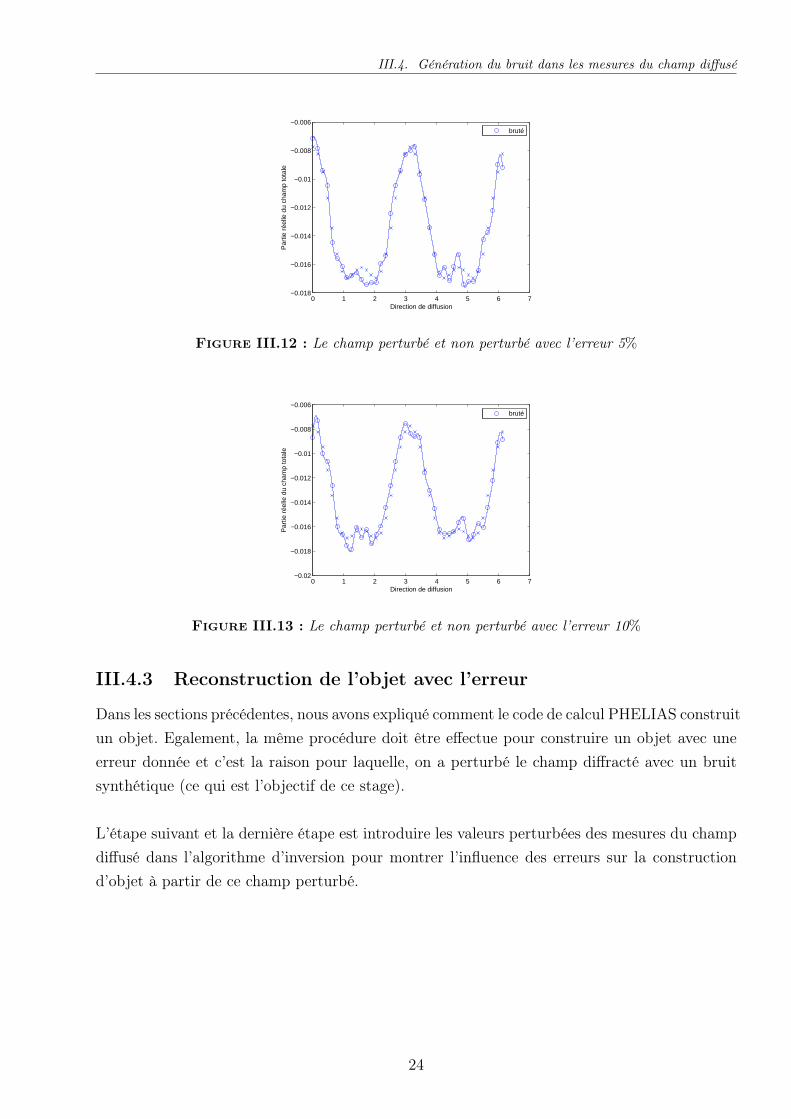
On considère d’avoir différentes pourcentage d’erreur (br = 5% et 10 %) et les courbes obtenus
sont montrées ci-après.
23
III.4. Génération du bruit dans les mesures du champ diffusé
0 1 2 3 4 5 6 7−0.018
−0.016
−0.014
−0.012
−0.01
−0.008
−0.006
Direction de diffusion
Par
tie r
éelle
du
cham
p to
tale
bruté
Figure III.12 : Le champ perturbé et non perturbé avec l’erreur 5%
0 1 2 3 4 5 6 7−0.02
−0.018
−0.016
−0.014
−0.012
−0.01
−0.008
−0.006
Direction de diffusion
Par
tie r
éelle
du
cham
p to
tale
bruté
Figure III.13 : Le champ perturbé et non perturbé avec l’erreur 10%
III.4.3 Reconstruction de l’objet avec l’erreur
Dans les sections précédentes, nous avons expliqué comment le code de calcul PHELIAS construit
un objet. Egalement, la même procédure doit être effectue pour construire un objet avec une
erreur donnée et c’est la raison pour laquelle, on a perturbé le champ diffracté avec un bruit
synthétique (ce qui est l’objectif de ce stage).
L’étape suivant et la dernière étape est introduire les valeurs perturbées des mesures du champ
diffusé dans l’algorithme d’inversion pour montrer l’influence des erreurs sur la construction
d’objet à partir de ce champ perturbé.
24
IV
Perspective et Conclusion
Conclusion générale
La base du sujet étudié est sur la construction d’un modèle réel qui est de la forme d’un corps
composites avec trois cylindres circulaires en 2D.
Les conditions aux limites peuvent être de type transmission (l’onde pénètre à l’intérieur du
corps). La configuration étudiée sont telle que l’objet se trouve placé dans l’espace infini et
illuminé par une onde plane, d’incidence et de fréquence variable. Ce corps diffracte un champ
acoustique que l’on mesure (ou simule numériquement) sur une partie ou la totalité d’une sur-
face qui l’entoure complètement.
Plusieurs stratégie de résolution de problème inverse existent et parmi aux la méthode qui pro-
pose une nouvelle forme d’approximation (ICBA) est choisit. Le caractère local et canonique de
la méthode ICBA modifie la démarche traditionnelle (la recherche du minimum d’une fonction
coût en résolvant d’un problème direct à chaque étape) des processus d’inversion.
25
La stratégie est extrêmes simple et elle consiste à résoudre une seule équation (nonlinéaire) à
une inconnue pour une direction donnée. Cette équation traduit la différence entre le champ
”mesure” et le champ difracté par un cylindre circulaire intercepteur (2D). La recherche se
ramène à celle des possibles rayons du corps canonique.
Remarquons que, lors de l’inversion, les traditionnelles résolutions du problème direct sont
alors contournées en employant des solutions explicites connues relatives à des configurations
canoniques équivalentes.
Conclusion de ce stage
Cette méthode simple d’inversion pose également quelque problème (le problème mal posé)
et on peut mettre en avant le problème de stabilité de solution (la stabilité de l’algorithme
d’inversion vis-à-vis des données (généralement issues de mesures expérimentales)).
Pour apporter un élément de réponse à la stabilité, nous avons introduit un bruit aléatoire
simulant, en quelque sorte, les erreurs de mesures dans les données du champ total numérique-
ment simulées.
Grâce notamment à une procédure de post-traitement (qui se substitue aux traditionnelles
méthodes de pénalisation) nous avons pu réduire l’importance de données bruitées sur la re-
construction qui en résulte.
Les différents exemples testés par cette algorithme, nous ont montré que les constructions
peuvent être assez précises même lorsque les formes des cibles sont éloignées des formes ca-
noniques (i.e., cylindre circulaire) associées au problème direct. Lorsque la différence entre la
solution canonique utilisée et la configuration réelle est grande, les reconstructions sont moins
précises mais apportent quand même de l’information très important, notamment sur les di-
mensions caractéristiques et la forme générale de la cible.
D’autres part, le post-traitement permet de sélectionner la “bonne solution” pour des données
ou non.
Perspective de stage
D’une façon générale, la précision de la reconstruction augmente avec la fréquence. On constate
nettement que les parties non-convexes des cibles sont nettement mieux reconstruites à haute
fréquence mais ce résonnement est valable lorsqu’on n’a pas commis une erreur.
C’est la raison pour laquelle, nous avons essayé de construire les objets avec une erreur donnée
afin d’étudier l’influence de la fréquence sur la construction de l’objets.
26

Cependant, ce gain de précision des se fait aux dépens d’une certaine “facilité” d’utilisation
des algorithmes (choix de contour initial, nécessité d’utiliser plus de termes dans les séries du
champ diffus, etc.).
Par ailleurs, dans le cadre d’améliorer la fonction coût multi fréquence, nous avons choisi η
= 1 dans la relation (III.9) pour trouver le meilleur minima. On peut également continuer
d’améliorer cette fonction, en choisissant différente η pour la base et l’haute fréquence. Ce
choix est difficile car il nous donne 2 possibilités suivantes :
1. Soit on choisit une η qui améliore la stabilité de la solution en base fréquence mais on
perd la précision de solution (le minima de la fonction coût est évasée en base fréquence)
2. Soit on choisit une η qui améliore la précision en haute fréquence (le minima de la fonction
coût est précis en haute fréquence) mais on perd la stabilité de la solution
Effectivement, le choix de η et fréquence sont les grandes perspective de ce stage.
27
Bibliographie
[1] Wirgin A. and Scotti T. Wide-band approximation of the sound field scattered by an
impenetrable body of arbitrary shape. J.Sound Vibr., 194 :537–572, 1996.
[2] A. Wirgin E. Ogam, T. Scotti. Non-ambiguous boundary identification of a cylindrical
object by acoustic waves. Inverse Problems, 329 :61–66, 2001.
[3] T. Scotti. Localisation et reconstruction des caractéristiques géométriques et physiques d’un
objet à l’aide de mesures du champ acoustique diffusé. Université de la Mediterranée, 1997.
[4] Wirgin A. Scotti T. Shape reconstruction using diffracted waves and canonical solutions.
Inverse Probs., 11 :1097–1111, 1995.
[5] Wirgin A. Scotti T. Global optimisation of non-linear inverse scattering problems. In
ECCOMAS, 2008.
[6] Fokkema J. T. van den Berg P.M. The rayleigh hypothesis in the theory of diffraction by a
cylindrical obstacle. IEEE Trans.Anten.Prop., 27 :577–583, 1979.
28