Embed Size (px)
Citation preview
Modélisation, Discrétisation etSimulation Numérique
Lyes DOUADJI
Département de Génie Électrique & d’Électronique (INELEC)Faculté Sciences l’Ingénieur
Université de Boumerdès
Modèle? & pourquoi modéliser?
Qu'est-ce qu'un modèle ?Le principe d'un modèle est de remplacer un système complexe enun objet ou opérateur simple reproduisant les aspects oucomportements principaux de l'original (exemples : modèle réduit,maquette, modèle mathématique ou numérique, modèle de penséeou raisonnement).
Pourquoi faut-il modéliser ?Dans la nature, les systèmes et phénomènes physiques les plusintéressants sont aussi les plus complexes à étudier. Ils sontsouvent régis par un grand nombre de paramètres non- linéairesinteragissant entre eux (la météorologie, la turbulence des fluides...).
Quels sont les différents modèles ?L'une des solutions est de recourir à une série d'expériences pour analyser lesparamètres et grandeurs du système. Mais les essais peuvent s'avérer trèscoûteux (essais en vol, essais avec matériaux rares, instrumentations trèschères...) et ils peuvent être très dangereux (essais nucléaires, environnementspatial...). Enfin il peut être difficile de mesurer tous les paramètres : échelles duproblème trop petites (couche limite en fluide...) ou trop grandes (astrophysique,météorologie, géophysique...).
Quels sont les différents modèles ? - Suite
On peut aussi construire un modèle mathématique permettant lareprésentation du phénomène physique. Ces modèles utilisent très souventdes systèmes d'équations aux dérivées partielles (EDP) non linéaires donton ne connaît pas de solutions analytiques en général. Il faut alors résoudrele problème numériquement en transformant les équations continues de laphysique en un problème discret sur un certain domaine de calcul (lemaillage). Dans certains cas il s'agit de la seule alternative (nucléaire,astrophysique, spatial...). Dans d'autres cas, les simulations numériquessont menées en parallèle avec des expérimentations.
De la modélisation à la simulationnumérique
Les différentes étapes de la modélisation
• Recherche d'un modèle mathématique représentant la physique (Mise enéquation).
• Élaboration d'un maillage. Discrétisation des équations de la physique.• Résolution des équations discrètes (souvent systèmes linéaires à
résoudre).• Transcription informatique et programmation des relations discrètes.• Simulation numérique et exploitation des résultats.
Exemple
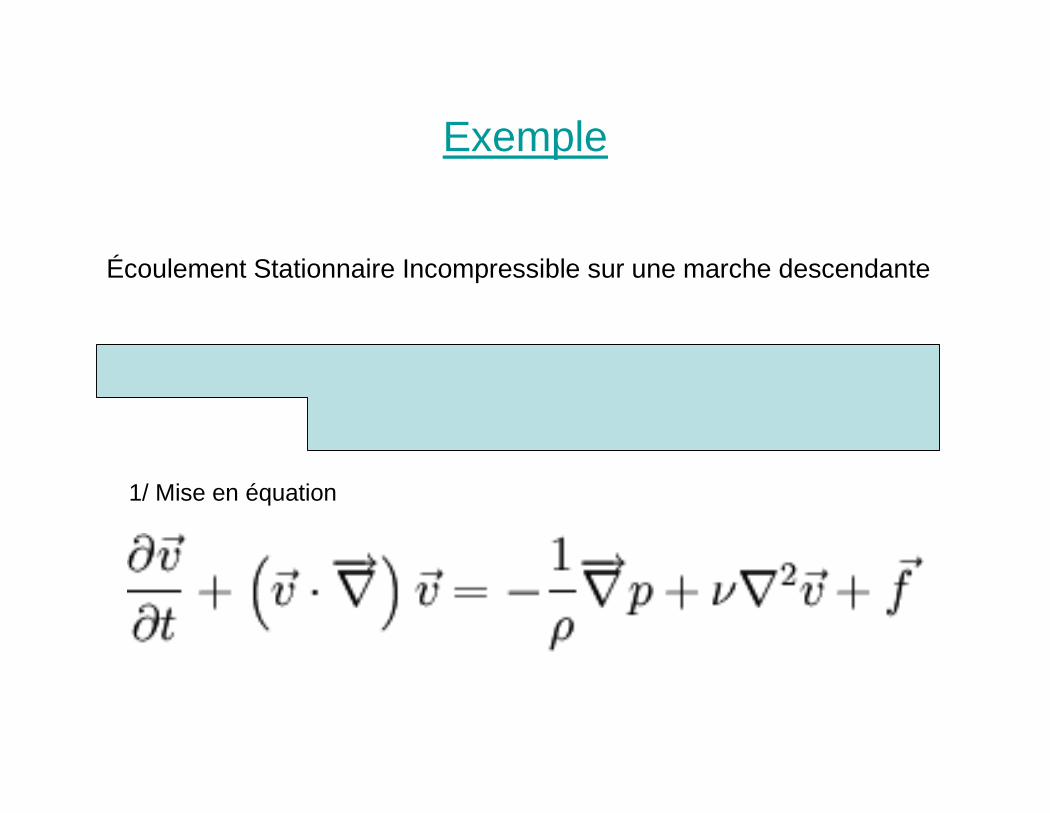
Écoulement Stationnaire Incompressible sur une marche descendante
1/ Mise en équation
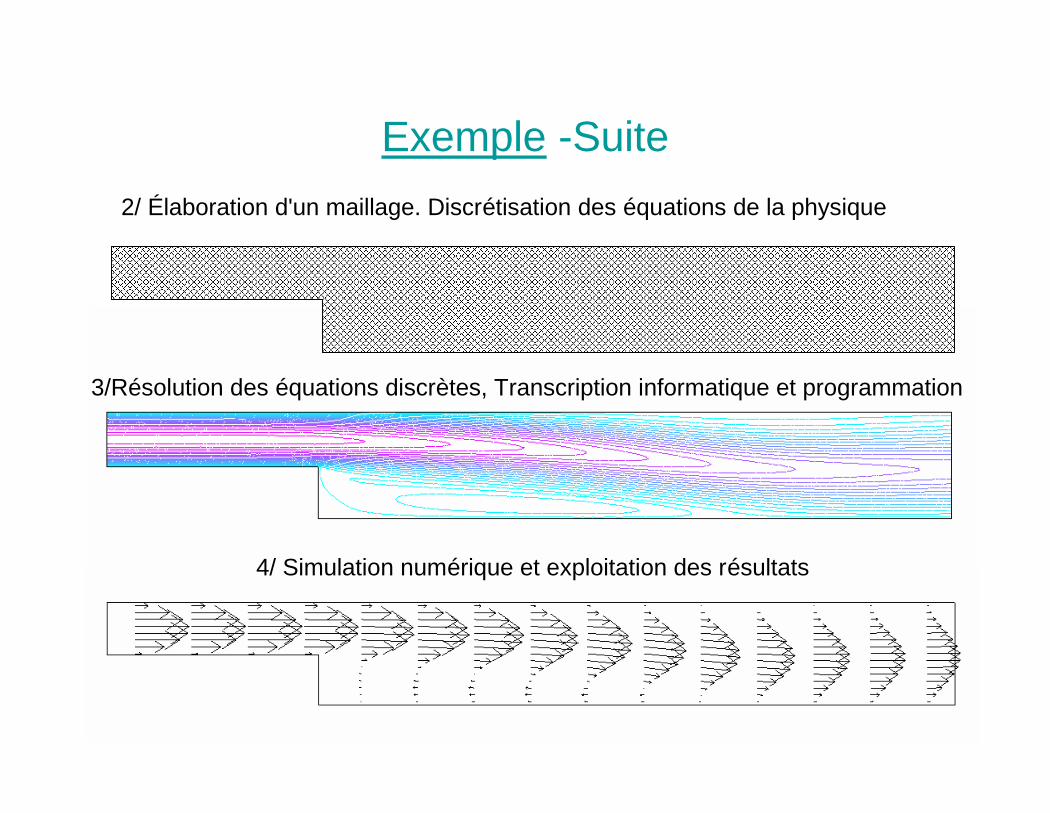
Exemple -Suite2/ Élaboration d'un maillage. Discrétisation des équations de la physique
3/Résolution des équations discrètes, Transcription informatique et programmation
4/ Simulation numérique et exploitation des résultats
Notion de stabilité
On distingue trois types de stabilité
• La stabilité d'un problème physique.• La stabilité d'un problème mathématique.• La stabilité numérique d'une méthode de calcul.
Stabilité d'un problème physique(système chaotique)
Un problème est dit chaotique si une petite variation des données initialesentraîne une variation totalement imprévisible des résultats. Cette notion dechaos, liée à la physique d'un problème, est indépendante du modèlemathématique utilisé et encore plus de la méthode numérique utilisée pourrésoudre ce problème mathématique. De nombreux problèmes sontchaotiques, par exemple la turbulence des fluides.
Stabilité d'un problème mathématique(sensibilité)
Un problème est dit très sensible ou mal conditionné si une petite variationdes données ou des paramètres entraîne une grande variation desrésultats. Cette notion de conditionnement, liée au problème mathématique,est indépendante de la méthode numérique utilisée pour le résoudre. Pourmodéliser un problème physique qui n'est pas chaotique, on construira unmodèle mathématique qui sera le mieux conditionné possible.
Stabilité d'une méthode numérique
Un problème peut être bien conditionné alors que la méthode numériquechoisie pour le résoudre est instable. Dans ce cas, il est impératif dechanger de méthode numérique. Par contre, si le problème de départ estmal conditionné, aucune méthode numérique ne pourra y remédier. Ilfaudra alors essayer de trouver une formulation mathématique différente dumême problème, si on sait que le problème physique sous-jacent est stable.
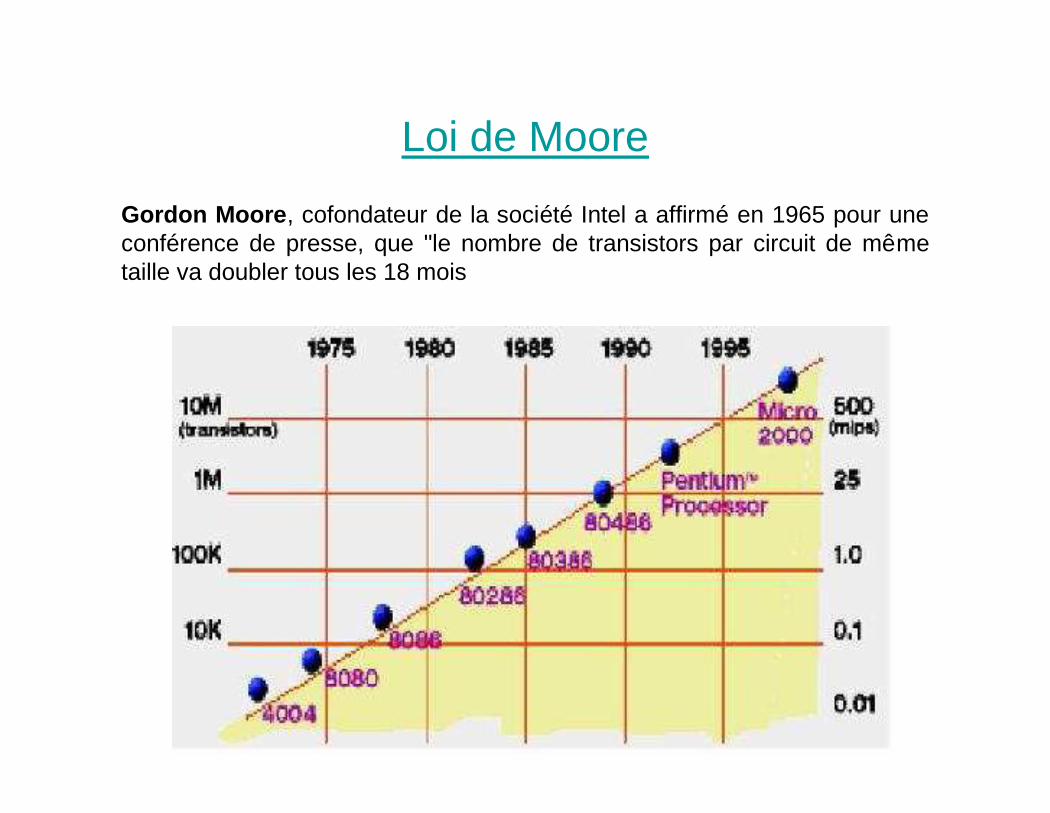
Loi de Moore
Gordon Moore, cofondateur de la société Intel a affirmé en 1965 pour uneconférence de presse, que "le nombre de transistors par circuit de mêmetaille va doubler tous les 18 mois
Discrétisation des EDP
La discrétisation est le passage d'une problème exact continu régitpar une EDP au problème approché discret, il existe trois grandesfamilles de méthodes :
• Les différences finies.• Les volumes finis.• Les éléments finis.
Introduction à la Méthodedes différences finies
Méthode des différences finies
Dans le domaine de l'analyse numérique, on peut êtreamené à rechercher la solution d'une équation auxdérivées partielles.
Parmi les méthodes de résolutions courammentpratiquées, la méthode des différences finies est laplus facile d'accès. Elle est due aux travaux de plusieursmathématiciens du 18ème siècle (Euler, Taylor,Leibniz...).
Approximation des opérateurs
Grâce aux formules de Taylor, on définit la discrétisationdes opérateurs différentiels (dérivées premières,secondes, etc).
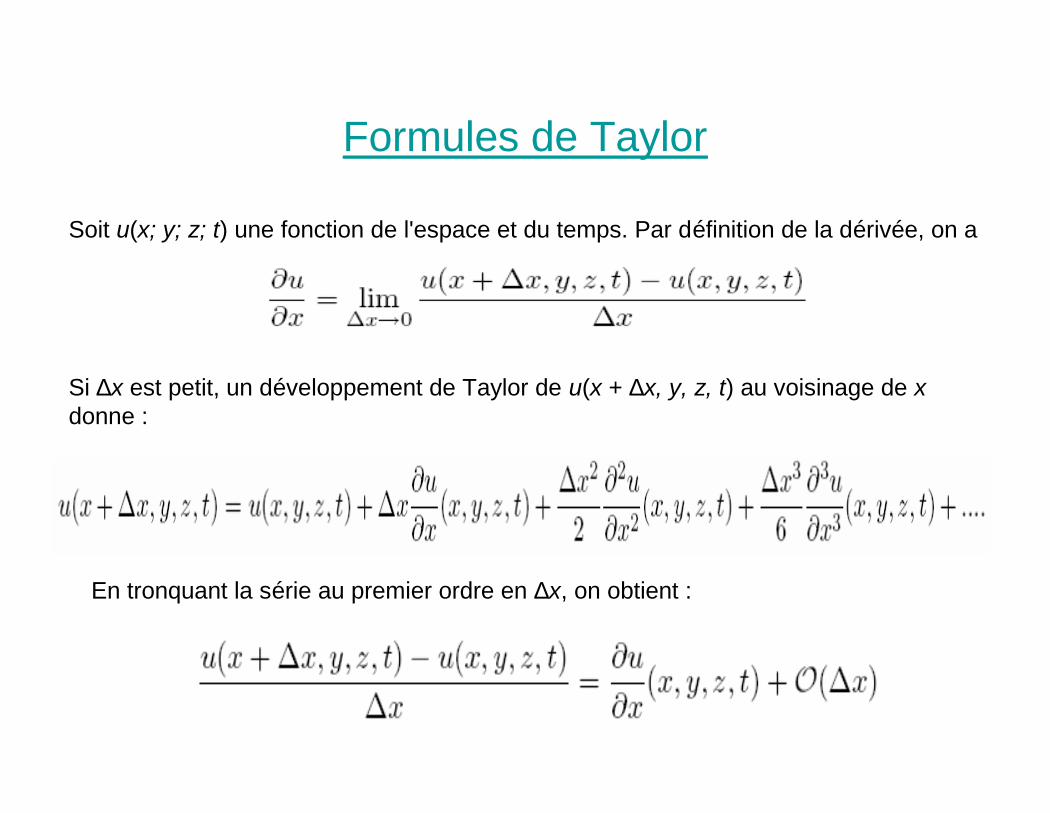
Formules de Taylor
Si ∆x est petit, un développement de Taylor de u(x + ∆x, y, z, t) au voisinage de xdonne :
En tronquant la série au premier ordre en ∆x, on obtient :
Soit u(x; y; z; t) une fonction de l'espace et du temps. Par définition de la dérivée, on a
Notation indicielle - cas 1D
• Considérons un cas monodimensionnel où l'on souhaite déterminer unegrandeur u(x) sur l'intervalle [0,1]. La recherche d'une solution discrète de lagrandeur u amène à constituer un maillage de l'intervalle de définition. Onconsidère un maillage (ou grille de calcul) composé de N + 1 points xi pouri= 0,….,N régulièrement espacés avec un pas ∆x. Les points xi = i ∆x sontappelés les noeuds du maillage.
• Le problème continu de départ de détermination d'une grandeur sur unensemble de dimension infinie se ramène ainsi à la recherche de N valeursdiscrètes de cette grandeur aux différents noeuds du maillage.
Notation:On note ui la valeur discrète de u(x) au point xi,soit ui = u(xi)
De même pour la dérivée de u(x) au noeud xi,
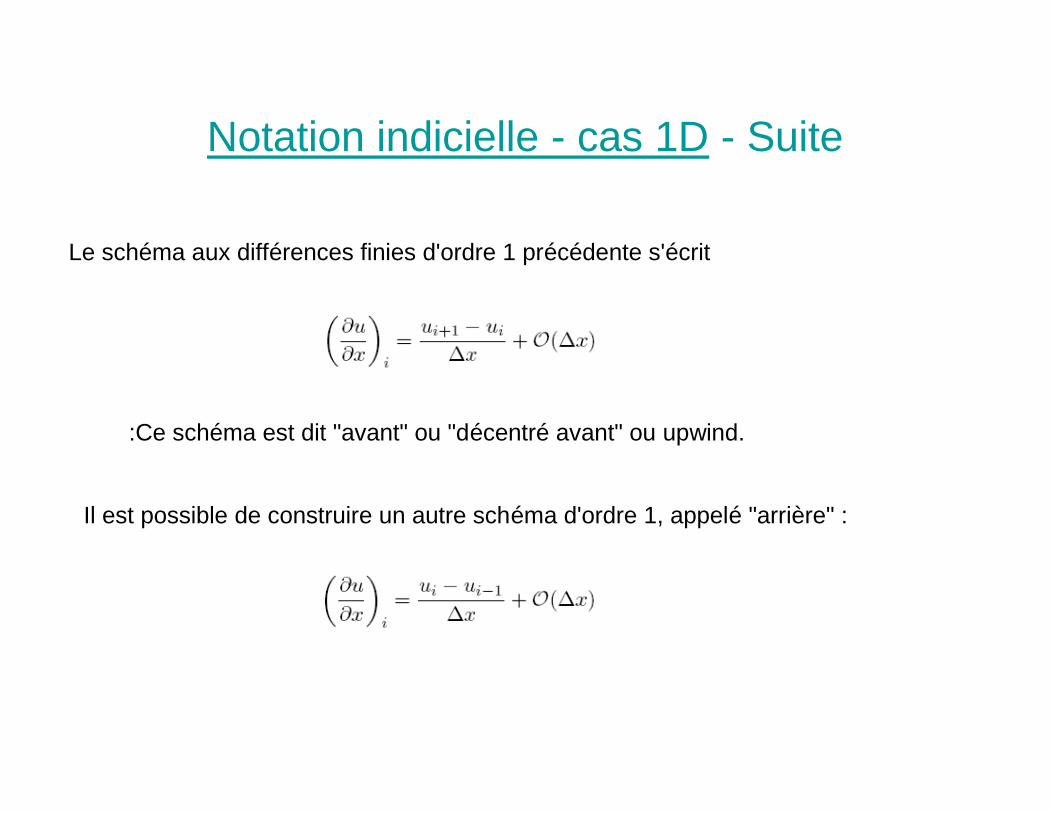
Notation indicielle - cas 1D - Suite
Le schéma aux différences finies d'ordre 1 précédente s'écrit
:Ce schéma est dit "avant" ou "décentré avant" ou upwind.
Il est possible de construire un autre schéma d'ordre 1, appelé "arrière" :
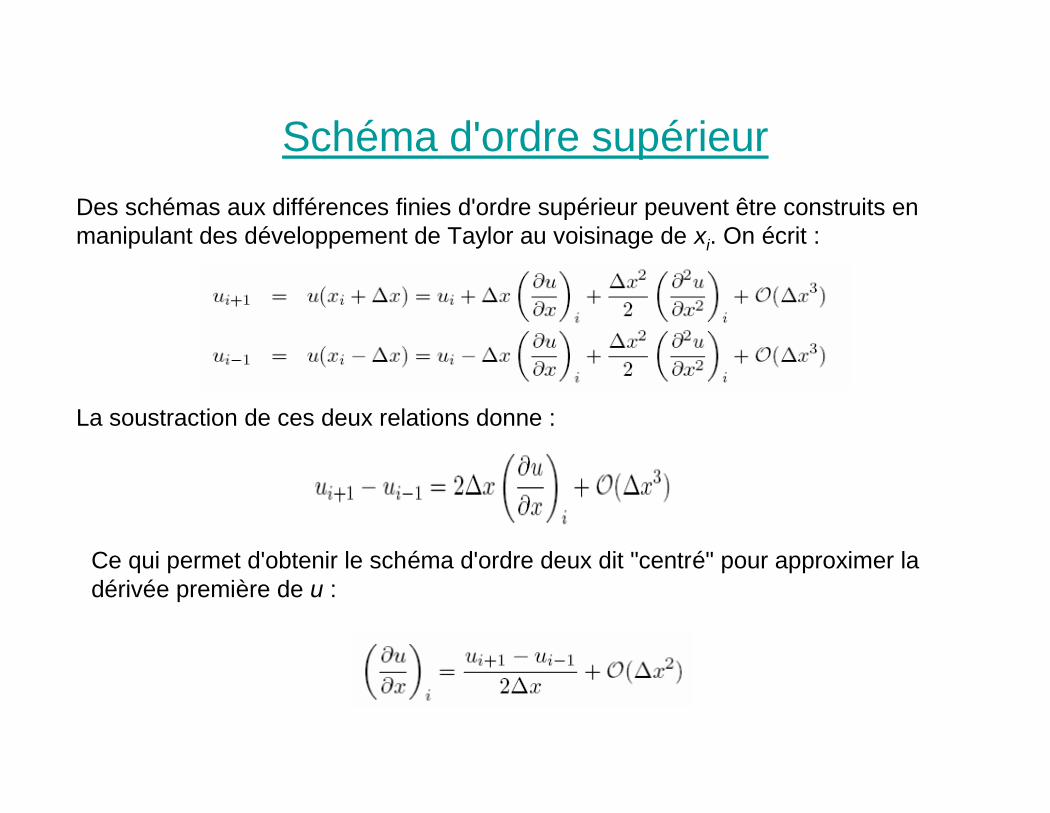
Schéma d'ordre supérieurDes schémas aux différences finies d'ordre supérieur peuvent être construits enmanipulant des développement de Taylor au voisinage de xi. On écrit :
La soustraction de ces deux relations donne :
Ce qui permet d'obtenir le schéma d'ordre deux dit "centré" pour approximer ladérivée première de u :
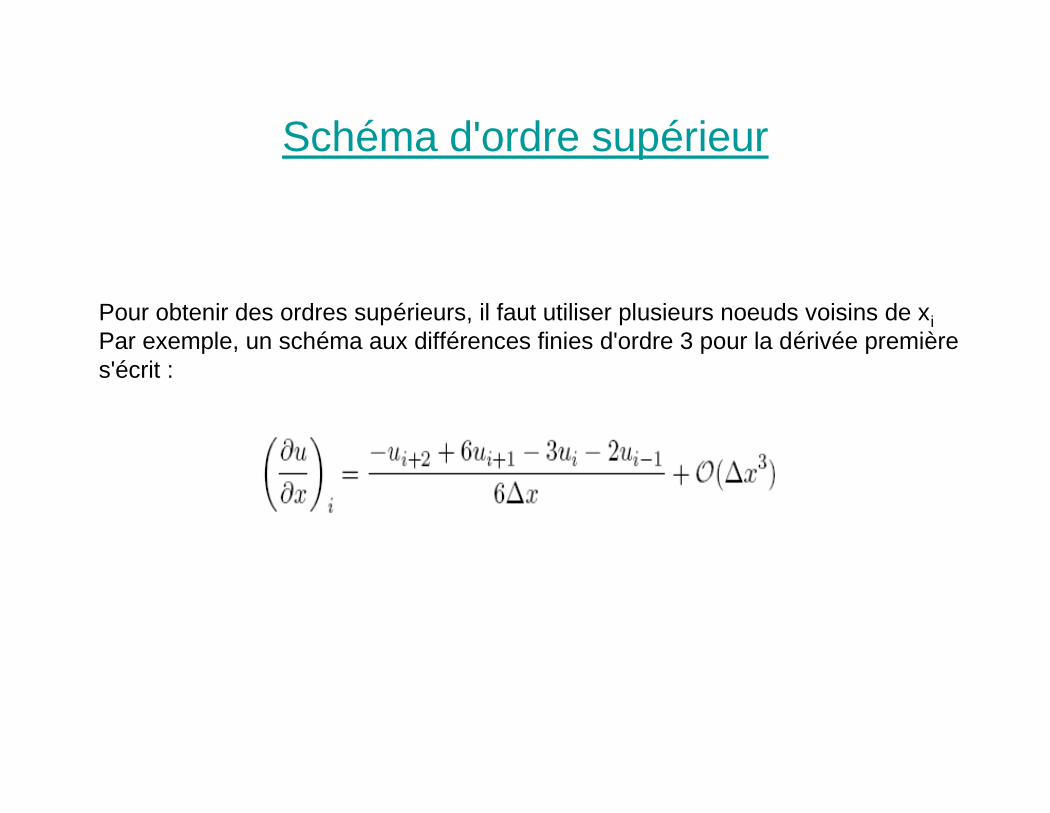
Schéma d'ordre supérieur
Pour obtenir des ordres supérieurs, il faut utiliser plusieurs noeuds voisins de xiPar exemple, un schéma aux différences finies d'ordre 3 pour la dérivée premières'écrit :
Dérivée d'ordre supérieur
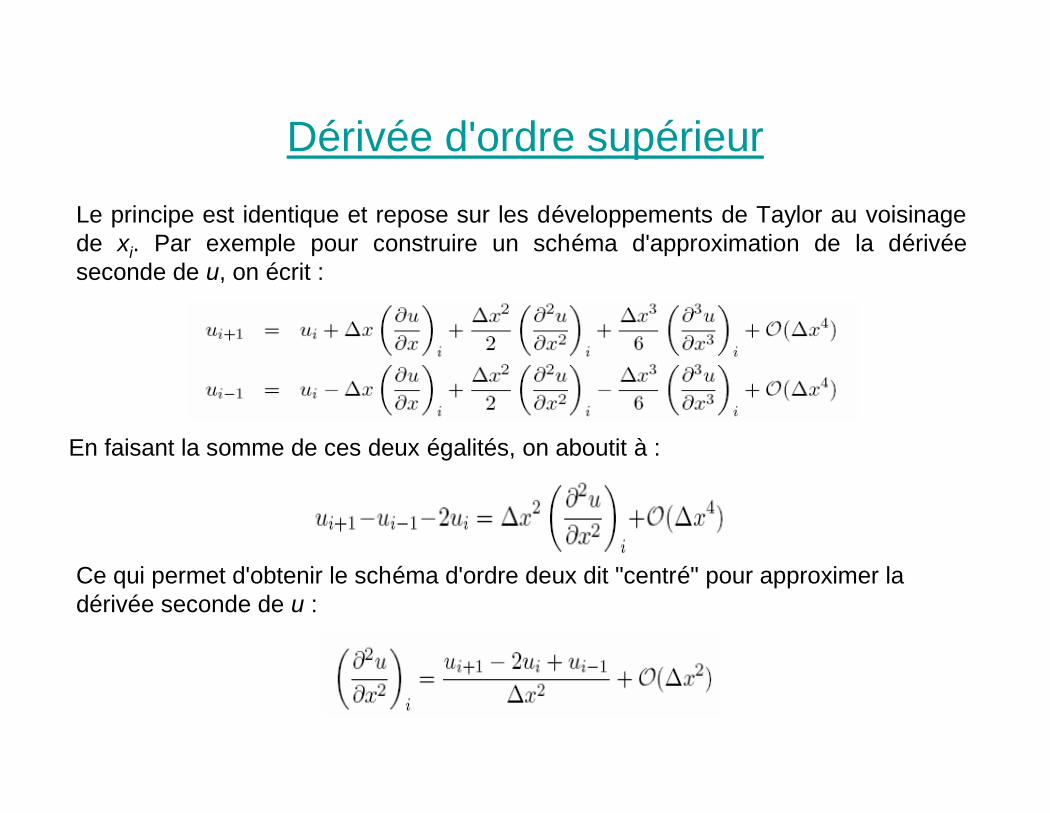
Le principe est identique et repose sur les développements de Taylor au voisinagede xi. Par exemple pour construire un schéma d'approximation de la dérivéeseconde de u, on écrit :
En faisant la somme de ces deux égalités, on aboutit à :
Ce qui permet d'obtenir le schéma d'ordre deux dit "centré" pour approximer ladérivée seconde de u :
Dérivée d'ordre supérieur -Suite
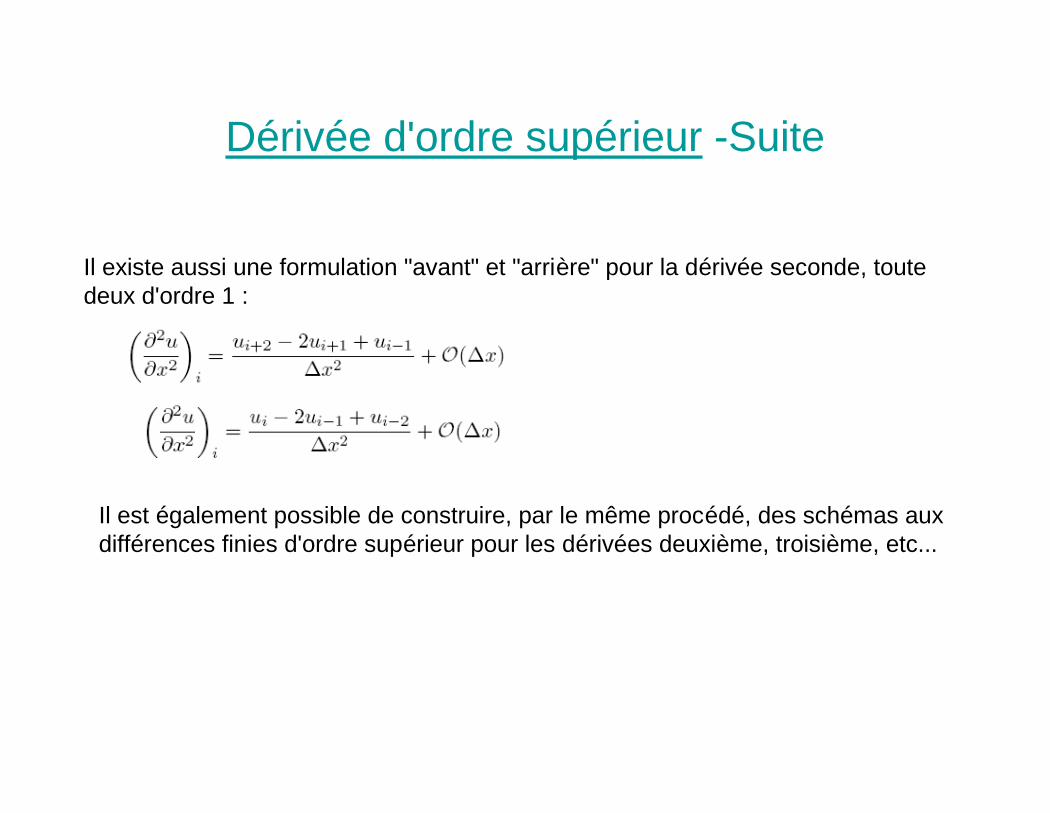
Il existe aussi une formulation "avant" et "arrière" pour la dérivée seconde, toutedeux d'ordre 1 :
Il est également possible de construire, par le même procédé, des schémas auxdifférences finies d'ordre supérieur pour les dérivées deuxième, troisième, etc...
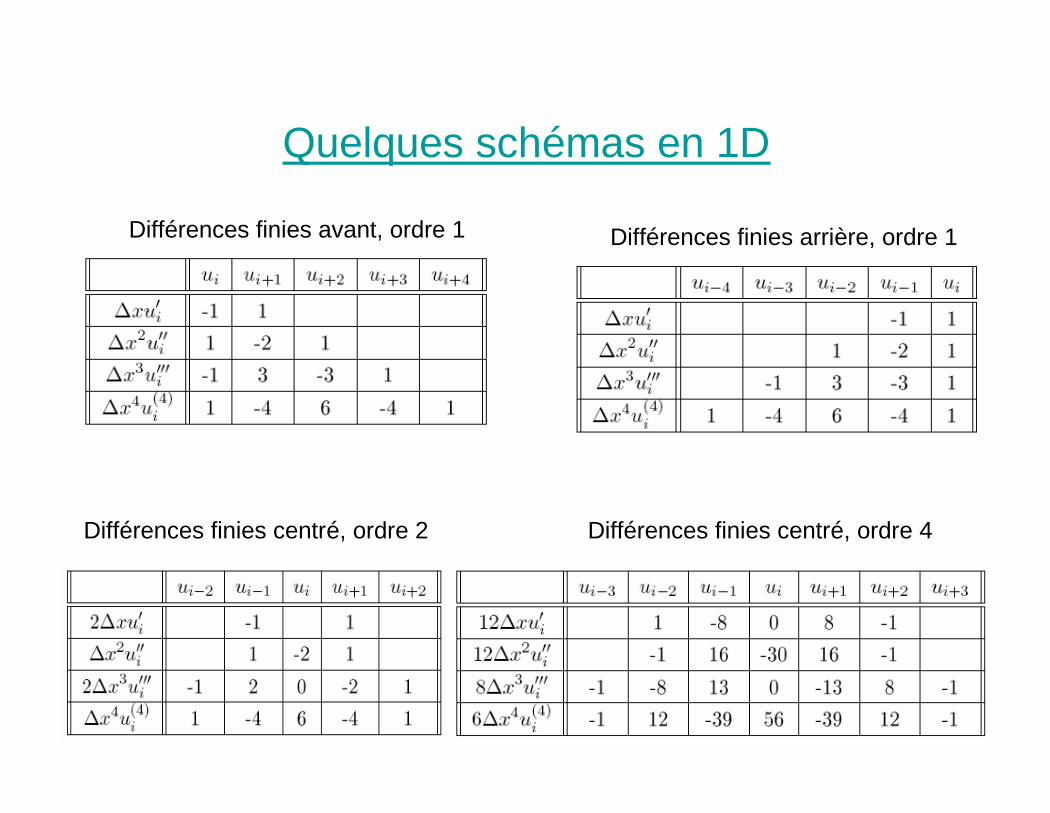
Quelques schémas en 1D
Différences finies avant, ordre 1 Différences finies arrière, ordre 1
Différences finies centré, ordre 2 Différences finies centré, ordre 4
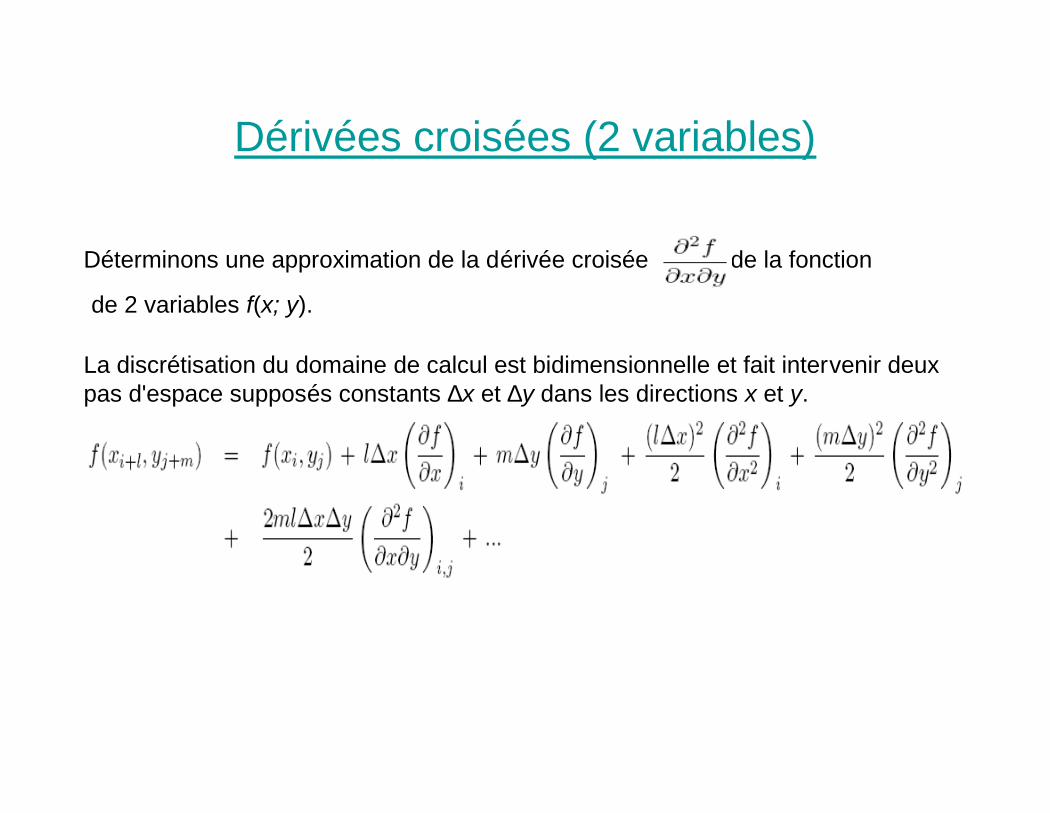
Dérivées croisées (2 variables)
Déterminons une approximation de la dérivée croisée de la fonction
de 2 variables f(x; y).
La discrétisation du domaine de calcul est bidimensionnelle et fait intervenir deuxpas d'espace supposés constants ∆x et ∆y dans les directions x et y.
La principe est toujours basé sur les développements de Taylor :
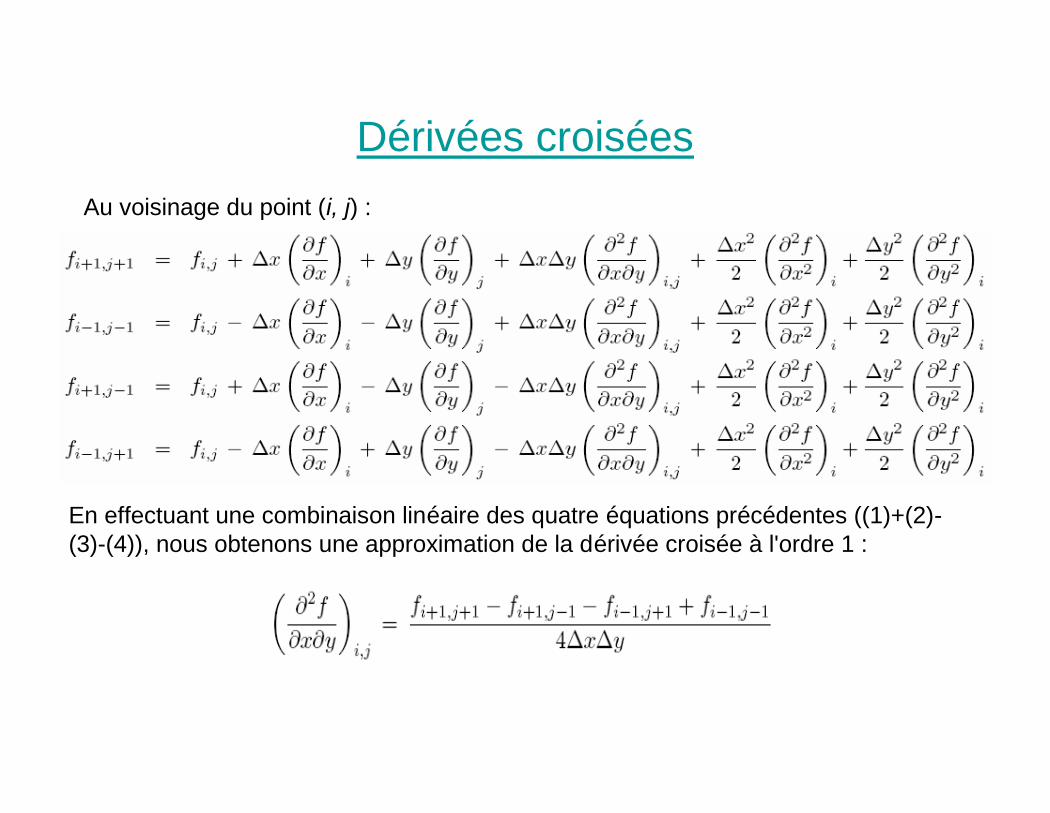
Dérivées croiséesAu voisinage du point (i, j) :
En effectuant une combinaison linéaire des quatre équations précédentes ((1)+(2)-(3)-(4)), nous obtenons une approximation de la dérivée croisée à l'ordre 1 :
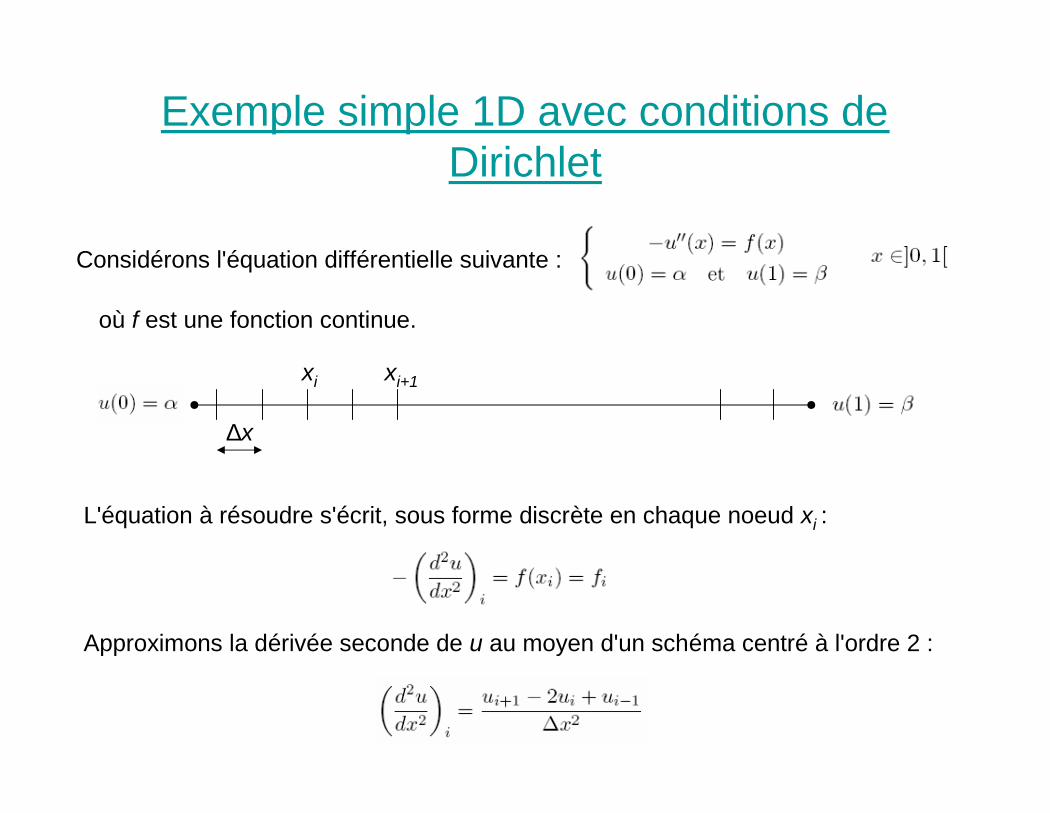
Exemple simple 1D avec conditions deDirichlet
Considérons l'équation différentielle suivante :
où f est une fonction continue.
∆x
xi+1xi
L'équation à résoudre s'écrit, sous forme discrète en chaque noeud xi :
Approximons la dérivée seconde de u au moyen d'un schéma centré à l'ordre 2 :
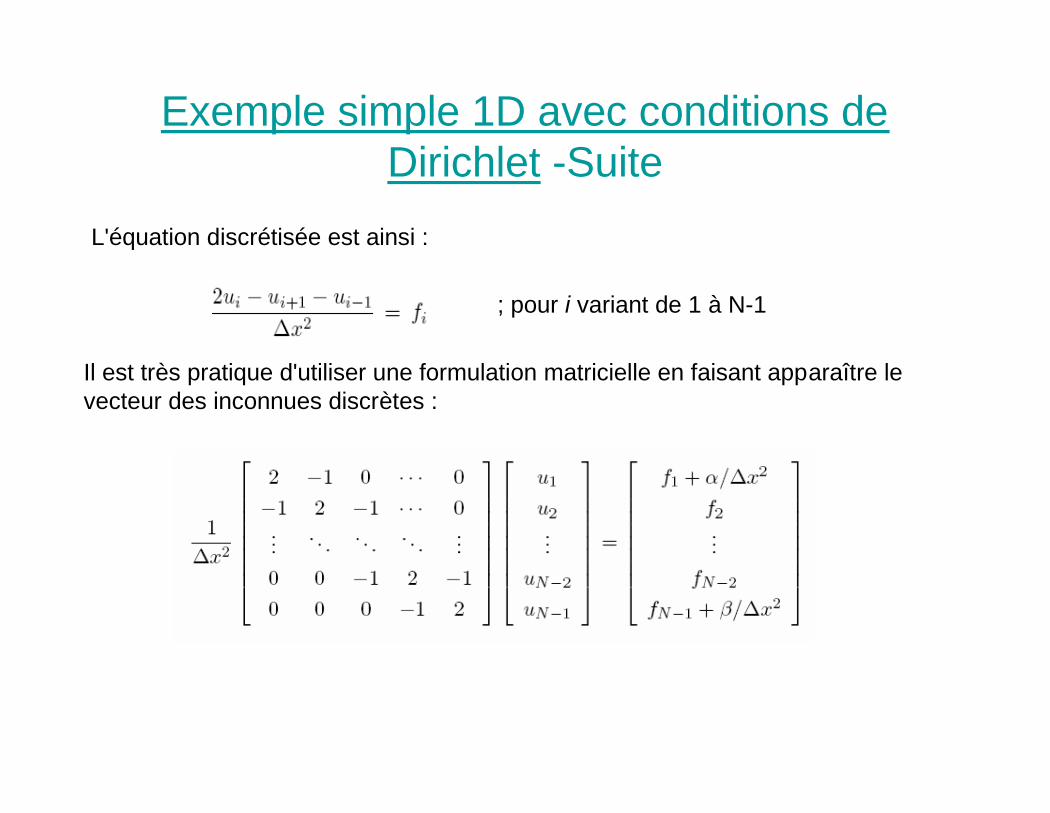
Exemple simple 1D avec conditions deDirichlet -Suite
L'équation discrétisée est ainsi :
; pour i variant de 1 à N-1
Il est très pratique d'utiliser une formulation matricielle en faisant apparaître levecteur des inconnues discrètes :
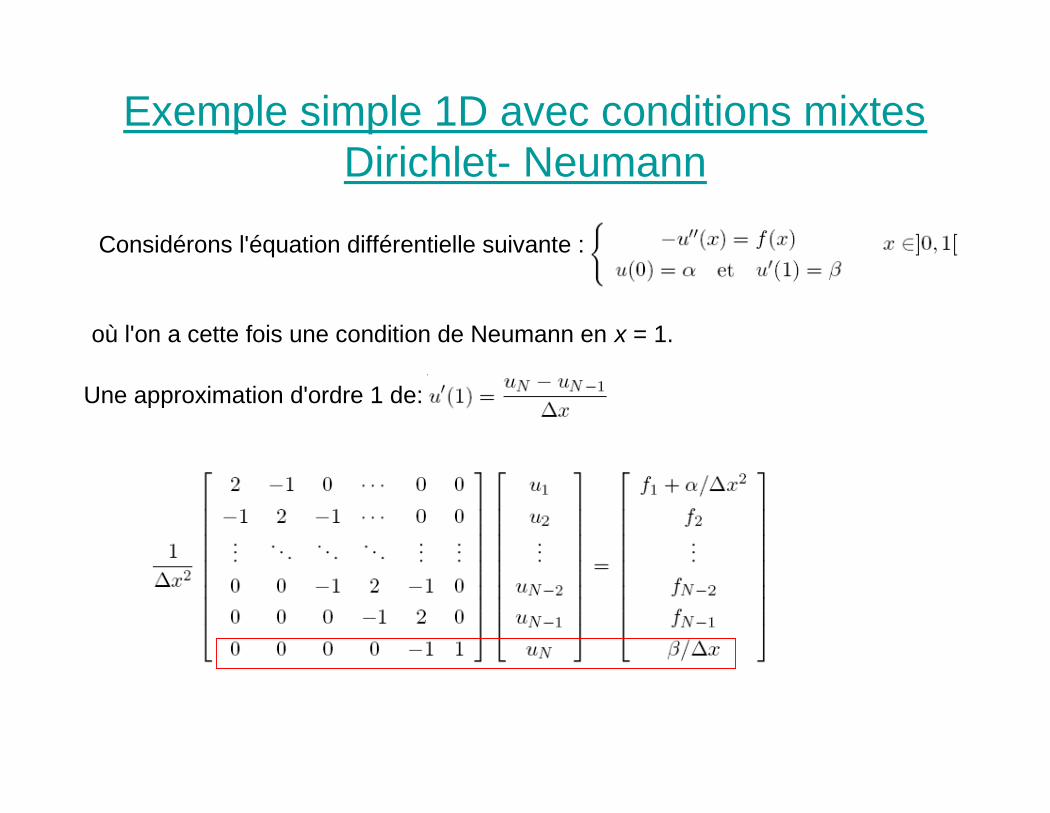
Exemple simple 1D avec conditions mixtesDirichlet- Neumann
Considérons l'équation différentielle suivante :
où l'on a cette fois une condition de Neumann en x = 1.
Une approximation d'ordre 1 de:
Discrétisation de l'équation de la chaleur 1DConsidérons le problème monodimensionnel de la conduction de la chaleur dansune barre de 1m de longueur. Le champ de température T(x; t) vérifie l'équationde la chaleur :
où α est la diffusivité thermique.
A cette EDP s'ajoute deux conditions aux limites aux extrémités de la barreT(0;t)=Tg et T(1; t) = Td ainsi qu'une condition initiale T(x; 0) = T0.
L'intervalle [0,1] est discrétisé en N +1 noeuds de coordonnées xi (i variant de 0à N) régulièrement espacés. Notons ∆x le pas d'espace. Le temps est discrétiséen intervalles de pas constant ∆t. Notons la température au noeud xi = i ∆x età l'instant t = n ∆t.
Discrétisation de l'équation de la chaleur 1D
On peut utiliser deux approches pour discrétiser cette équation de la chaleur.La première dite explicite utilise une discrétisation au noeud xi et à l'itérationcourante n :
Et la seconde dite implicite utilise une discrétisation au noeud xi et à l'itération n+1 :
Discrétisation de l'équation de la chaleur 1D
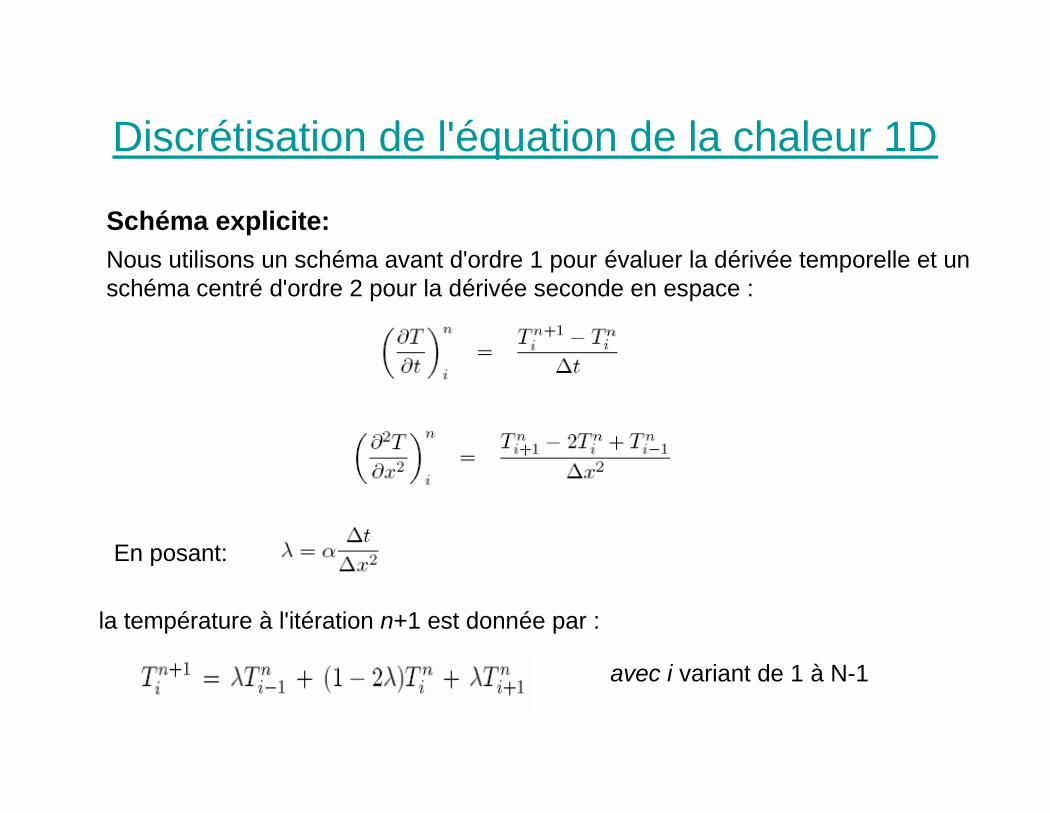
Schéma explicite:Nous utilisons un schéma avant d'ordre 1 pour évaluer la dérivée temporelle et unschéma centré d'ordre 2 pour la dérivée seconde en espace :
En posant:
la température à l'itération n+1 est donnée par :
avec i variant de 1 à N-1
Discrétisation de l'équation de la chaleur 1D
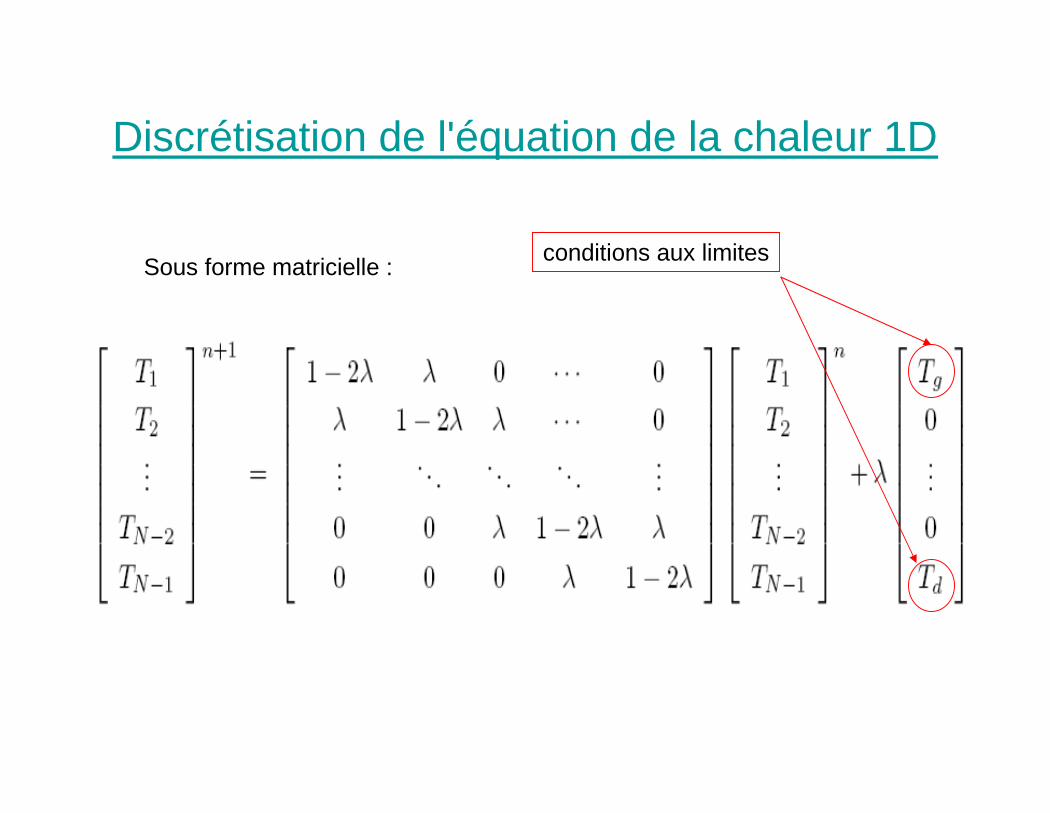
Sous forme matricielle : conditions aux limites
Discrétisation de l'équation de la chaleur 1D
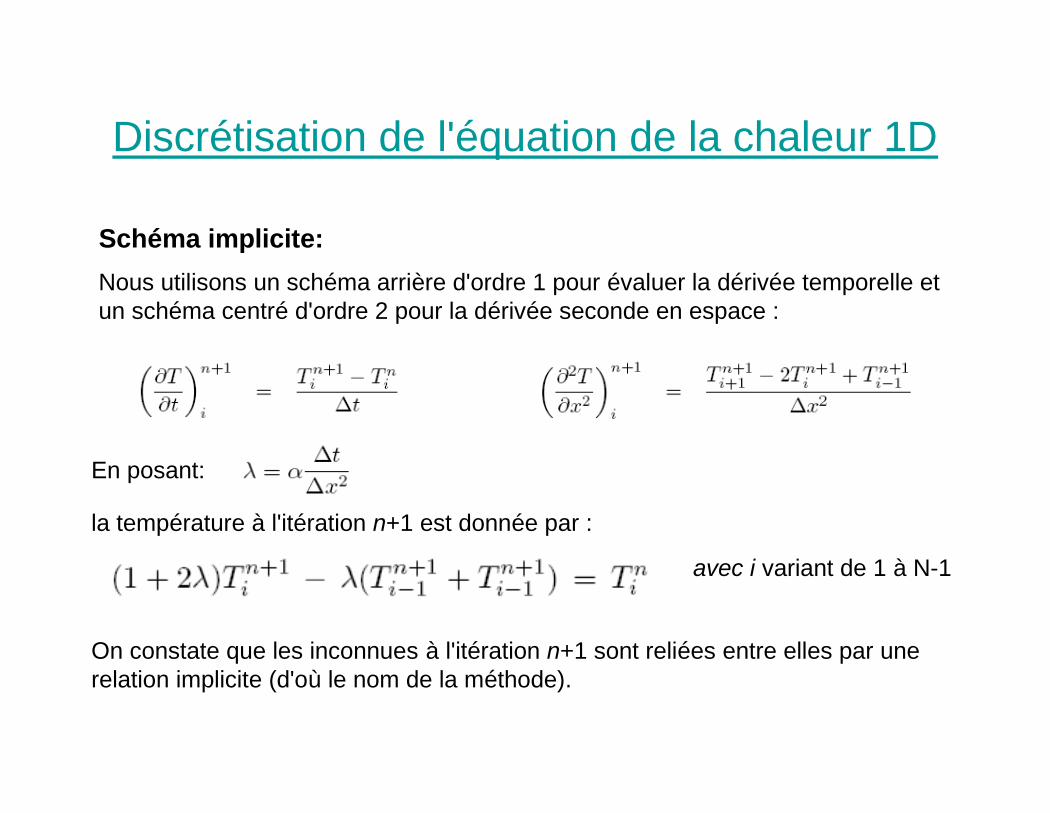
Schéma implicite:Nous utilisons un schéma arrière d'ordre 1 pour évaluer la dérivée temporelle etun schéma centré d'ordre 2 pour la dérivée seconde en espace :
En posant:
la température à l'itération n+1 est donnée par :
avec i variant de 1 à N-1
On constate que les inconnues à l'itération n+1 sont reliées entre elles par unerelation implicite (d'où le nom de la méthode).
Discrétisation de l'équation de la chaleur 1D
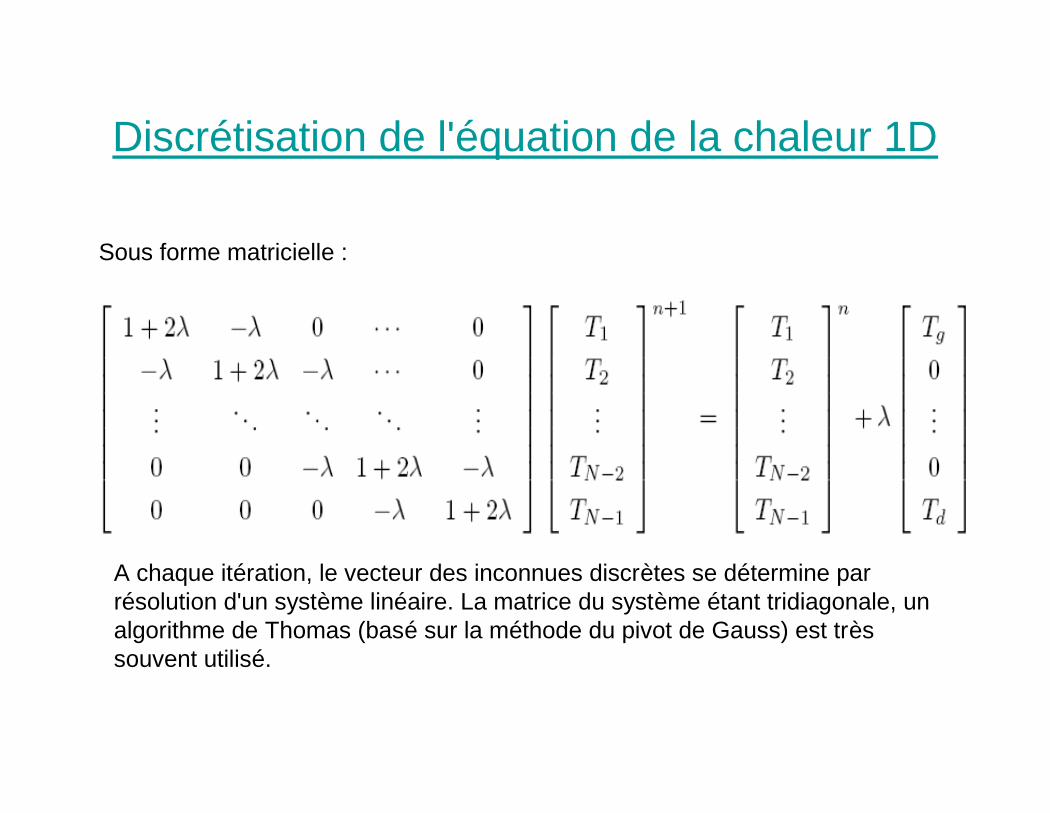
Sous forme matricielle :
A chaque itération, le vecteur des inconnues discrètes se détermine parrésolution d'un système linéaire. La matrice du système étant tridiagonale, unalgorithme de Thomas (basé sur la méthode du pivot de Gauss) est trèssouvent utilisé.
Algorithme de Thomas
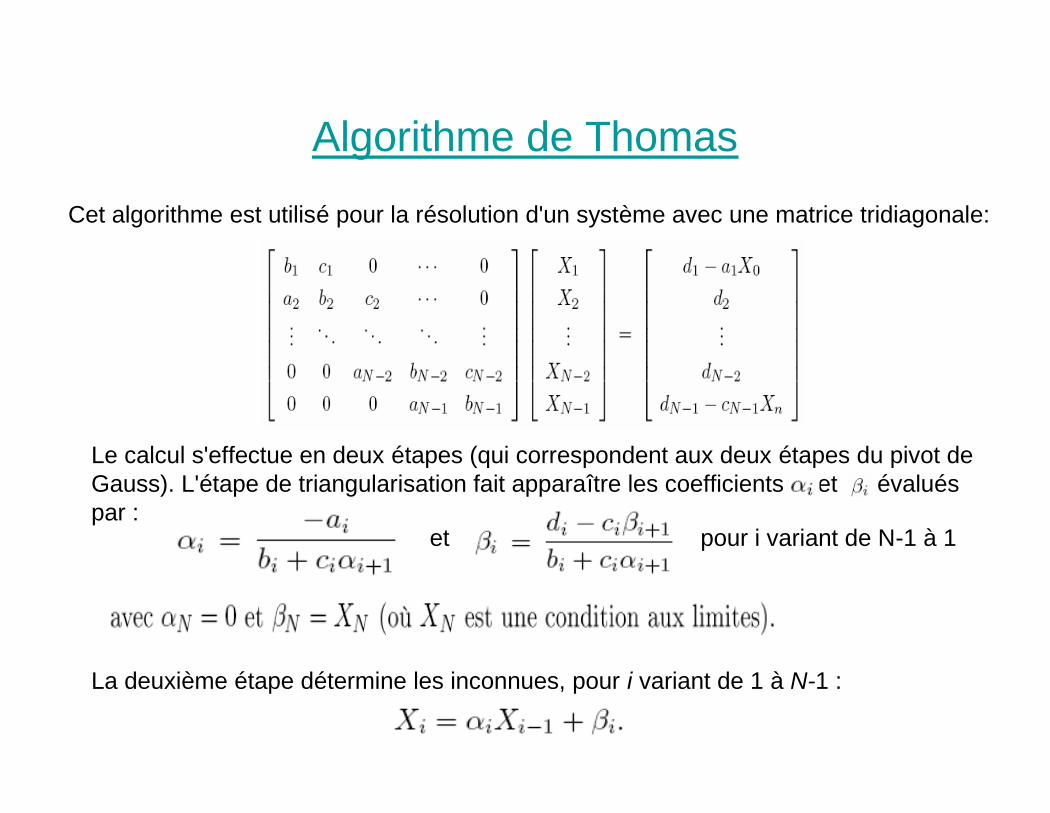
Cet algorithme est utilisé pour la résolution d'un système avec une matrice tridiagonale:
Le calcul s'effectue en deux étapes (qui correspondent aux deux étapes du pivot deGauss). L'étape de triangularisation fait apparaître les coefficients et évaluéspar :
pour i variant de N-1 à 1et
La deuxième étape détermine les inconnues, pour i variant de 1 à N-1 :
Discrétisation de l'équation de la chaleur 2Dstationnaire
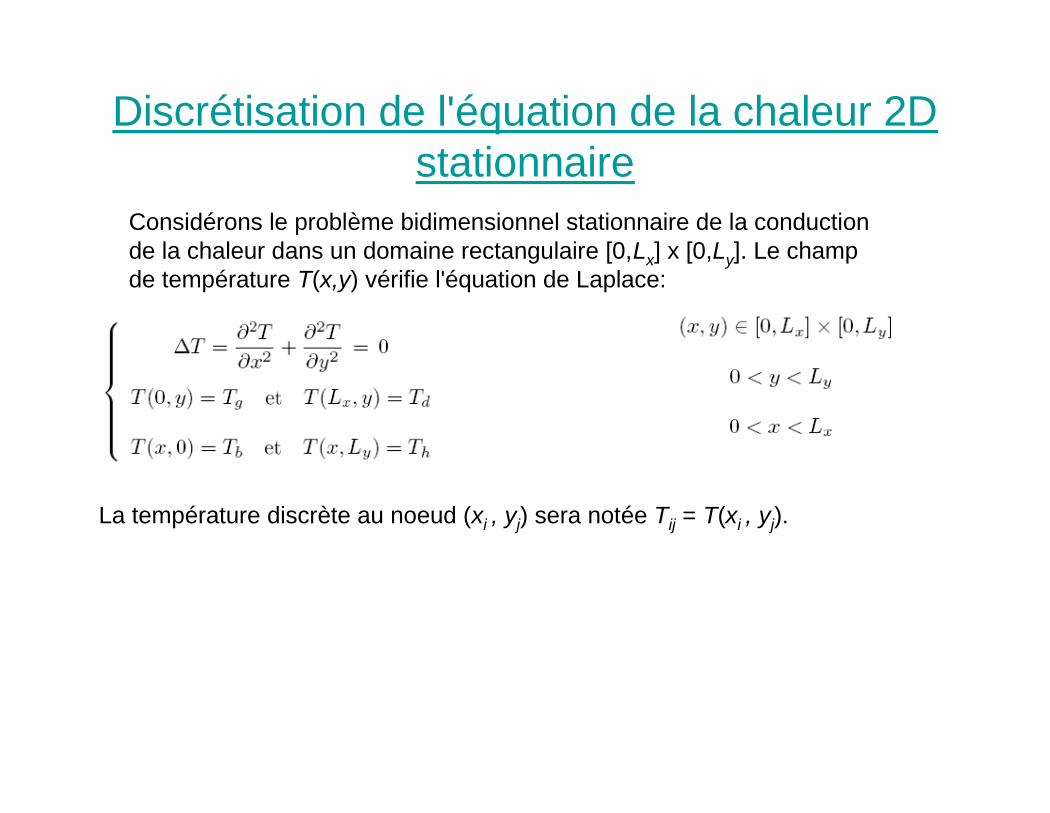
Considérons le problème bidimensionnel stationnaire de la conductionde la chaleur dans un domaine rectangulaire [0,Lx] x [0,Ly]. Le champde température T(x,y) vérifie l'équation de Laplace:
La température discrète au noeud (xi , yj) sera notée Tij = T(xi , yj).
Discrétisation de l'équation de la chaleur 2Dstationnaire
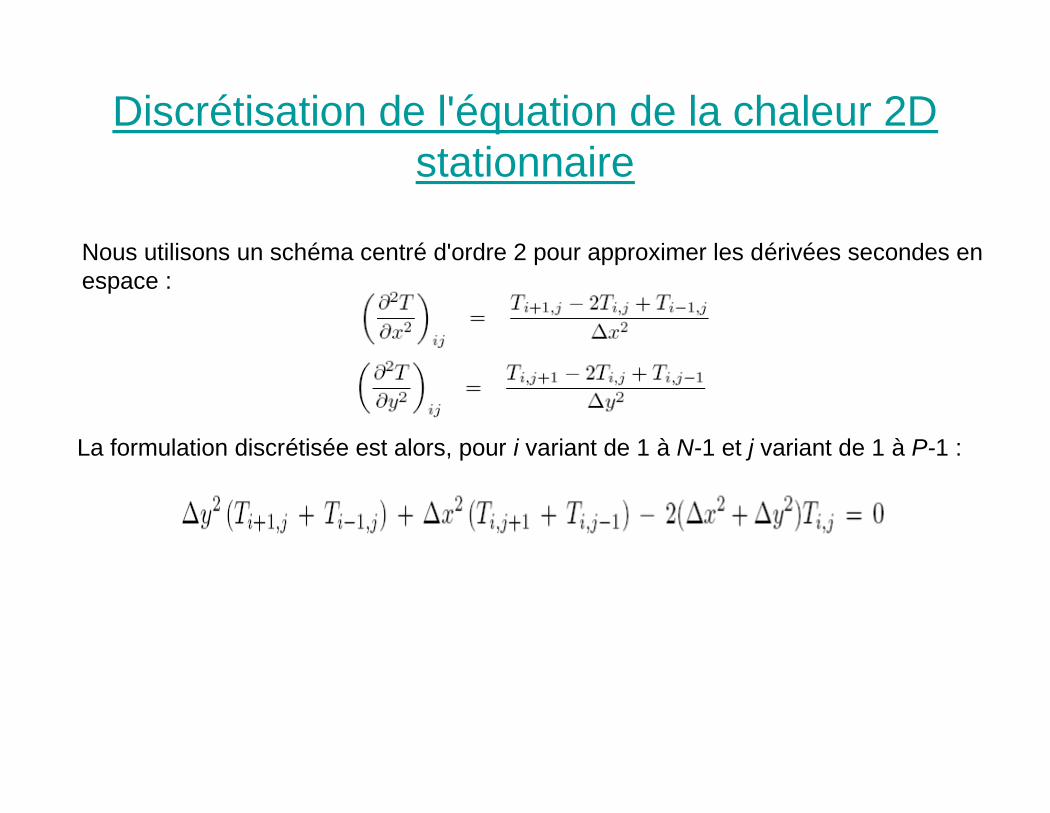
Nous utilisons un schéma centré d'ordre 2 pour approximer les dérivées secondes enespace :
La formulation discrétisée est alors, pour i variant de 1 à N-1 et j variant de 1 à P-1 :
Discrétisation de l'équation de la chaleur 2Dstationnaire
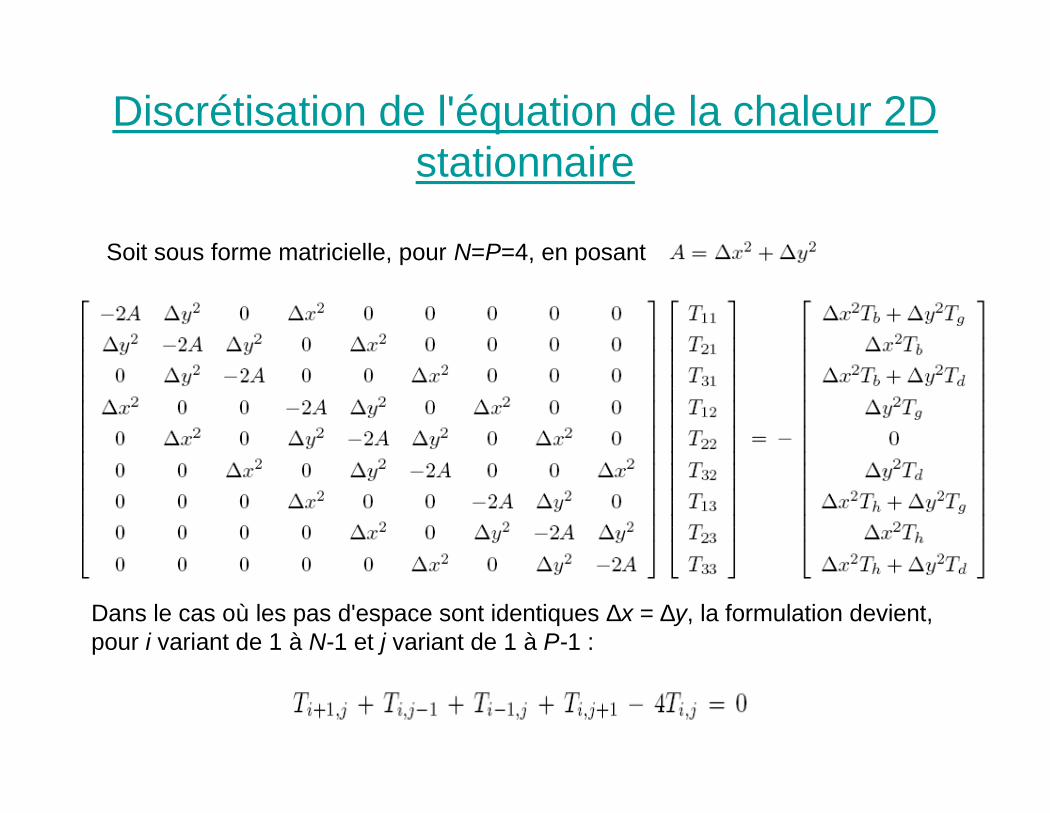
Soit sous forme matricielle, pour N=P=4, en posant
Dans le cas où les pas d'espace sont identiques ∆x = ∆y, la formulation devient,pour i variant de 1 à N-1 et j variant de 1 à P-1 :
Discrétisation de l'équation de la chaleur 2Dstationnaire
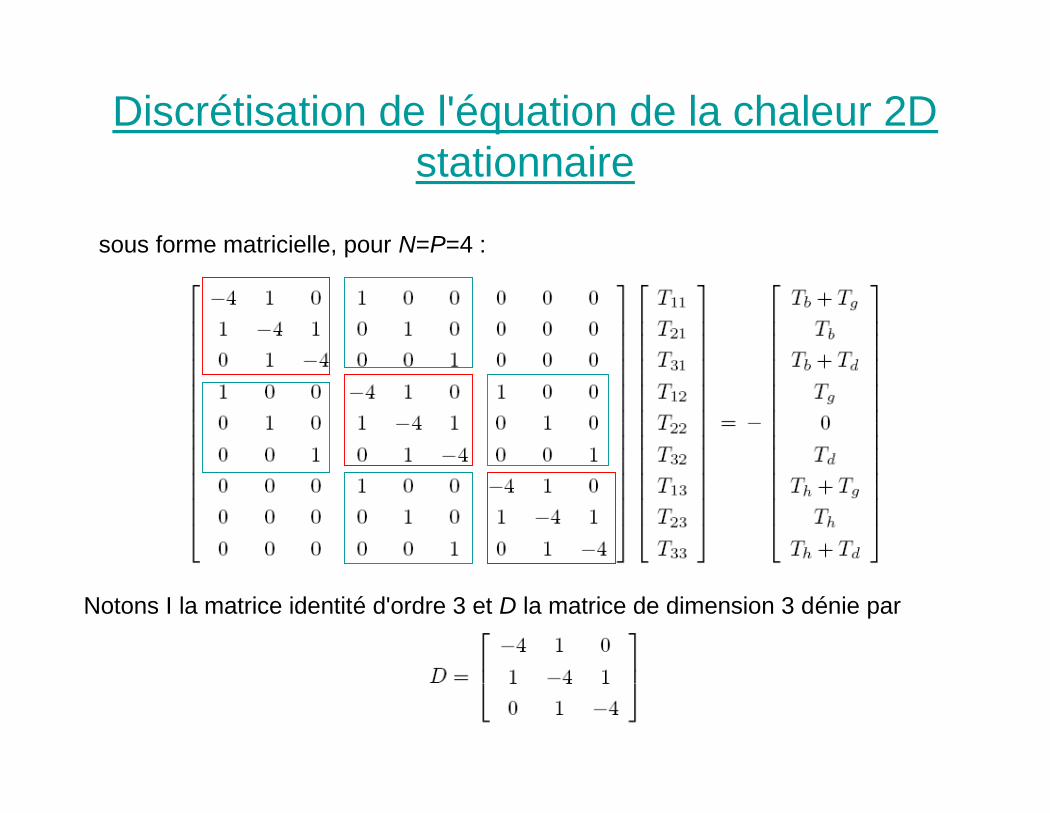
sous forme matricielle, pour N=P=4 :
Notons I la matrice identité d'ordre 3 et D la matrice de dimension 3 dénie par
Discrétisation de l'équation de la chaleur 2Dstationnaire
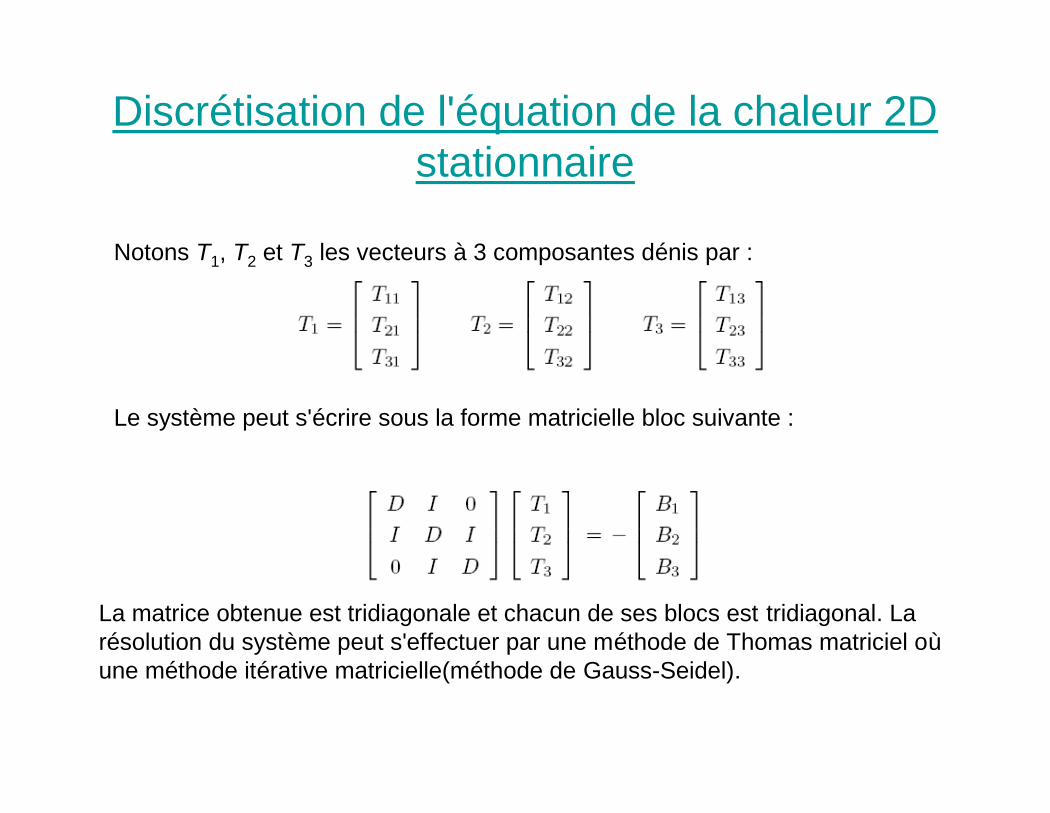
Notons T1, T2 et T3 les vecteurs à 3 composantes dénis par :
Le système peut s'écrire sous la forme matricielle bloc suivante :
La matrice obtenue est tridiagonale et chacun de ses blocs est tridiagonal. Larésolution du système peut s'effectuer par une méthode de Thomas matriciel oùune méthode itérative matricielle(méthode de Gauss-Seidel).
Algorithme de Thomas matriciel
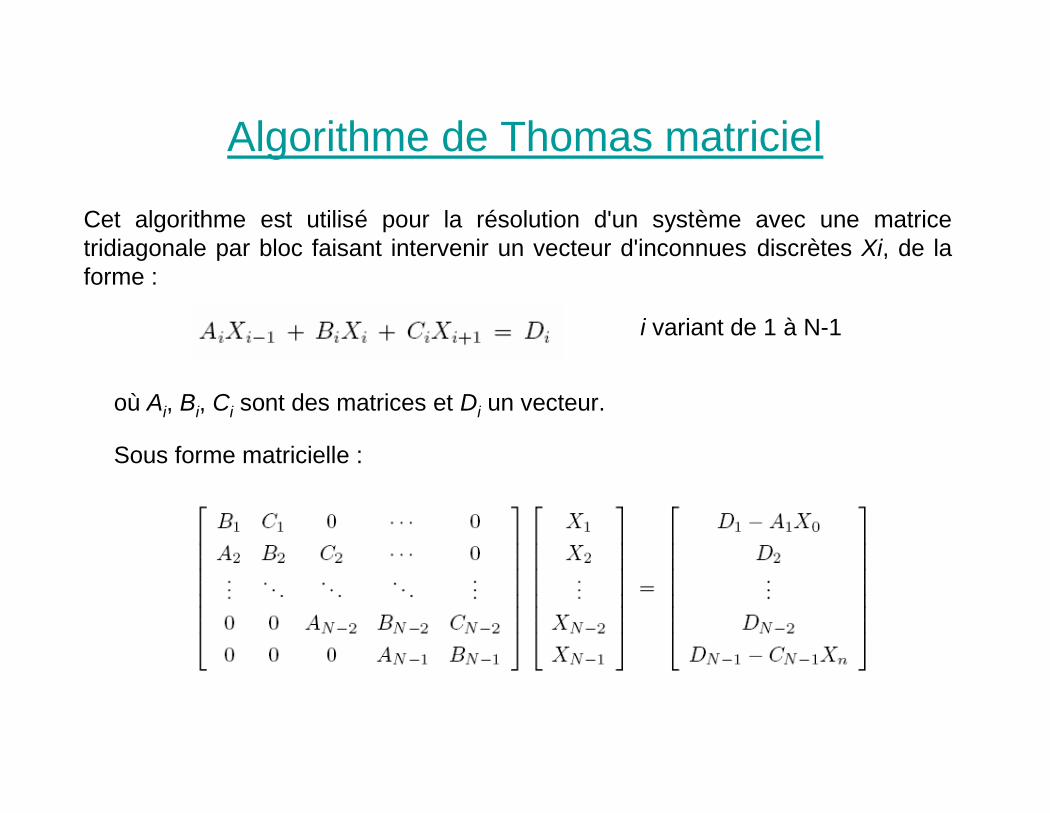
Cet algorithme est utilisé pour la résolution d'un système avec une matricetridiagonale par bloc faisant intervenir un vecteur d'inconnues discrètes Xi, de laforme :
i variant de 1 à N-1
où Ai, Bi, Ci sont des matrices et Di un vecteur.
Sous forme matricielle :
Algorithme de Thomas matriciel
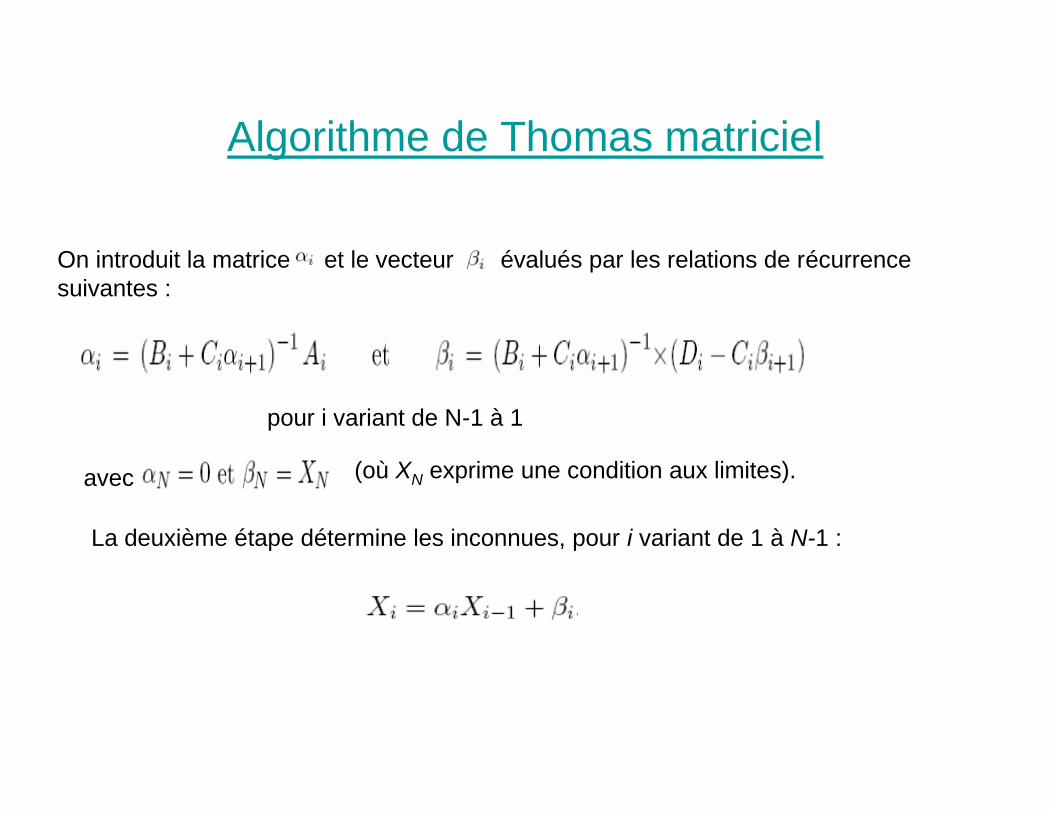
On introduit la matrice et le vecteur évalués par les relations de récurrencesuivantes :
pour i variant de N-1 à 1
avec (où XN exprime une condition aux limites).
La deuxième étape détermine les inconnues, pour i variant de 1 à N-1 :
Algorithme de Thomas matriciel
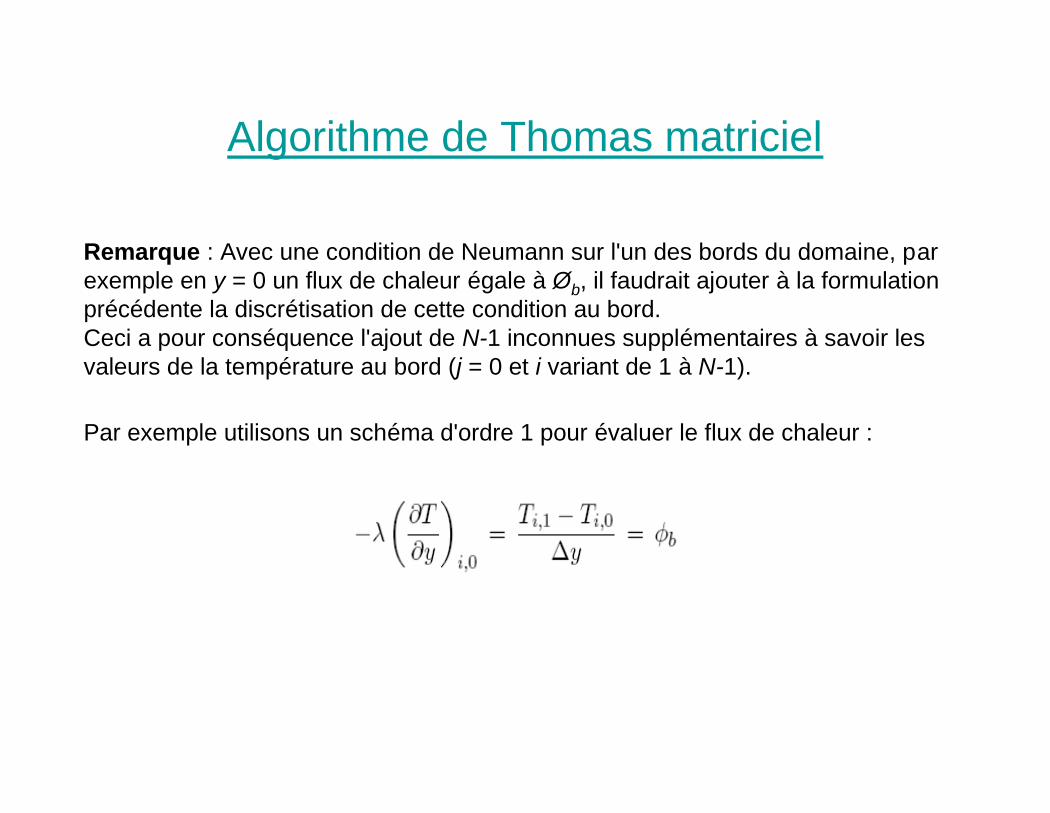
Remarque : Avec une condition de Neumann sur l'un des bords du domaine, parexemple en y = 0 un flux de chaleur égale à Øb, il faudrait ajouter à la formulationprécédente la discrétisation de cette condition au bord.Ceci a pour conséquence l'ajout de N-1 inconnues supplémentaires à savoir lesvaleurs de la température au bord (j = 0 et i variant de 1 à N-1).
Par exemple utilisons un schéma d'ordre 1 pour évaluer le flux de chaleur :
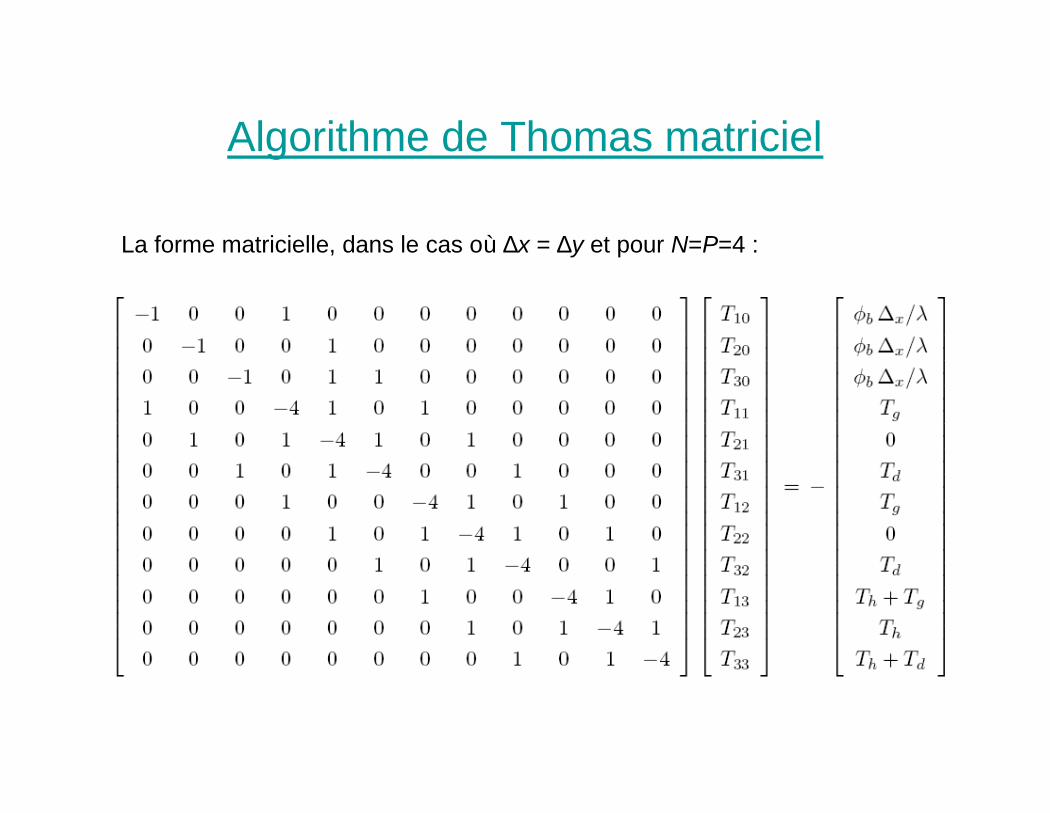
Algorithme de Thomas matriciel
La forme matricielle, dans le cas où ∆x = ∆y et pour N=P=4 :
Logiciel
DONJON: ce logiciel permet le calcul du coeur du réacteur en utilisant lemodule TRIVAC pour résoudre l'équation de diffusion des neutrons par desméthodes d'éléments finis ou de différences finies. Ce module a d'ailleursété intégré à différents logiciels de calcul de réacteurs comme HQ-SIMEX(logiciel de suivi du coeur développé à Hydro-Québec pour la gestion ducombustible). Le code DONJON inclus aussi le module NDF qui est utilisépour résoudre l'équation de diffusion en utilisant des méthodes nodales.DONJON est un complément naturel à DRAGON et il permet d'effectuer denombreuses analyses statiques des calculs de flux direct ou adjoint, desharmoniques et d'adjoints généralisés. De plus, en se servantd'approximations quasistatiques (améliorée et généralisée), il permet aussiles études en cinétique espace-temps.
Références
• 1. L. Leithold. The Calculus with Analytic Geometry. Harper andRow Publishers, New York, 1972.
• 2. C. R. Wylie. Advanced Engineering Mathematics, 4th ed.McGraw-Hill Book Co., 1975.
• Numeriacal Methods, Robert W. Hornbeck