Embed Size (px)
Citation preview
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 1/21
Chapitre II : Commande Vectorielle De La MAS
1
II.1 Introduction
La commande vectorielle a été introduit en 1972 par Blaschke, cependant elle
n’a pu être implantée et utilisée réellement qu’avec les avancées en micro-
électronique, en effet, elle nécessite des calculs de transformation de ark, évolution
de fonction tri!onométrique des inté!rations, des ré!ulations",ce qui ne pouvait pas
se faire en pure analo!ique#
La difficulté ma$eure rencontrée dans la commande de la machine as%nchrone
réside dans le fait que le couple et le flu& sont de varia'les fortement couplées et touteaction sur l’une d’elles se répercute sur l’autre [12]#
lusieurs méthodes de commande de la machine as%nchrone ont été proposées
pour sélectionner ce pro'l(me, on cite ) titre d’e&emple, la commande scalaire,
appelée commande ) * + f constant# ette technique consiste ) !arder le rapport entre
la tension et la fréquence d’alimentation constant, le pro'l(me posé par ce t%pe de
commande est lorsque la vitesse est 'asse, il est impossi'le de maintenir le couple
constant# l e&iste d’autres méthodes mais elles sont tous limitées [17]#
Les techniques de la commande vectorielle ont permis l’utilisation de la machine
as%nchrone dans l’application de hautes performances, o. le moteur ) courant continu
était le seul moteur satisfaisant pour ce t%pe d’application# Le mod(le de ark permet
certaines simplifications# /n effet un choi& convena'le du rep(re permet d’o'tenir un
mod(le simple de la 0# e rep(re particulier peut être orienté sur le flu& rotorique,
sur le flu& statorique ou sur le flu& d’entrefer#
3ans le présent chapitre, l’étude est consacrée ) la commande vectorielle
4commande par flu& orienté5, et en particulier ) l’orientation du flu& rotorique par la
commande indirecte de la machine as%nchrone alimentée par l’onduleur de tension
commandé par technique MLI, en utilisant des ré!ulateurs classiques de t%pe #
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 2/21
Chapitre II : Commande Vectorielle De La MAS
2
II.2 Théorie de la commande vectorielle de la MAS
La méthode de commande scalaire a été proposée o. les principales varia'les
de commande sont la tension et la fréquence# 6n trouve que le flu& et le couple sont
tous les deu& fonctions de la fréquence et de l’amplitude de la tension# La réponse de
la machine est lente ) cause de l’effet de ce coupla!e#
our vaincre les limitations de la commande scalaire et les autres, on applique la
commande vectorielle qui permet d’assimiler la 0 ) une machine ) courant continu
) e&citation séparée.
La commande d’une 0 est effectuée simplement en pilotant deu& courants
continus# ar contre, le cas d’une 0 est 'eaucoup plus difficile car il faut piloter trois
!randeurs, deu& courants ou deu& tensions statoriques et la fréquence de ces si!nau&#
3’apr(s la proposition de Blaschke, on peut matriser ces difficultés en
introduisant des coordonnées de champ, la d%namique d’une 0 sera ramenée )
celle d’une 0# 3ans une machine ) courant continu, le rotor est 'o'iné de telle
mani(re que l’a&e de la force ma!nétomotrice de l’induit éta'lit un an!le de 98 avec
l’a&e du flu& inducteur, et ceci quelque soit la vitesse de rotation de la machine# 3e ce
fait, le couple est proportionnel au produit du flu& inducteur et du courant induit# 3ans
le cas d’une machine ) e&citation séparée, si l’on maintient le flu& inducteur constant,
le couple peut être contr:lé aussi rapidement que le courant induit peut l’être, fi!ure
#1#
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 3/21
Chapitre II : Commande Vectorielle De La MAS
3
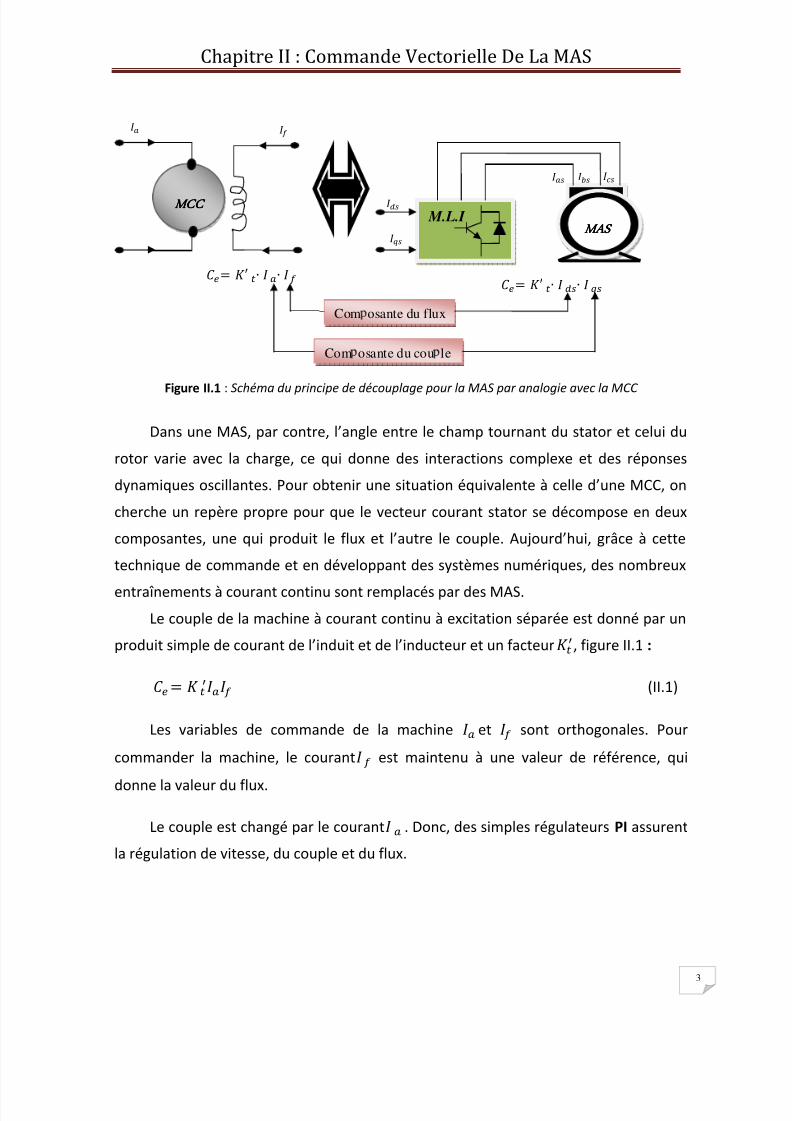
Figure II.1 ; Schéma du principe de découplage pour la MAS par analogie avec la MCC
3ans une 0, par contre, l’an!le entre le champ tournant du stator et celui du
rotor varie avec la char!e, ce qui donne des interactions comple&e et des réponses
d%namiques oscillantes# our o'tenir une situation équivalente ) celle d’une 0, on
cherche un rep(re propre pour que le vecteur courant stator se décompose en deu&
composantes, une qui produit le flu& et l’autre le couple# u$ourd’hui, !r<ce ) cette
technique de commande et en développant des s%st(mes numériques, des nom'reu&
entranements ) courant continu sont remplacés par des 0#
Le couple de la machine ) courant continu ) e&citation séparée est donné par un
produit simple de courant de l’induit et de l’inducteur et un facteur, fi!ure #1 :
= 4#15
Les varia'les de commande de la machine
et
sont ortho!onales# our
commander la machine, le courant est maintenu ) une valeur de référence, qui
donne la valeur du flu&#
Le couple est chan!é par le courant # 3onc, des simples ré!ulateurs PI assurent
la ré!ulation de vitesse, du couple et du flu&#
= ′ ∙ ∙
MCC MCC MCC MCC
= ′ ∙ ∙
MAS MAS MAS MAS M.L.I
Com osante du flux
Com osante du cou le
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 4/21
Chapitre II : Commande Vectorielle De La MAS
4
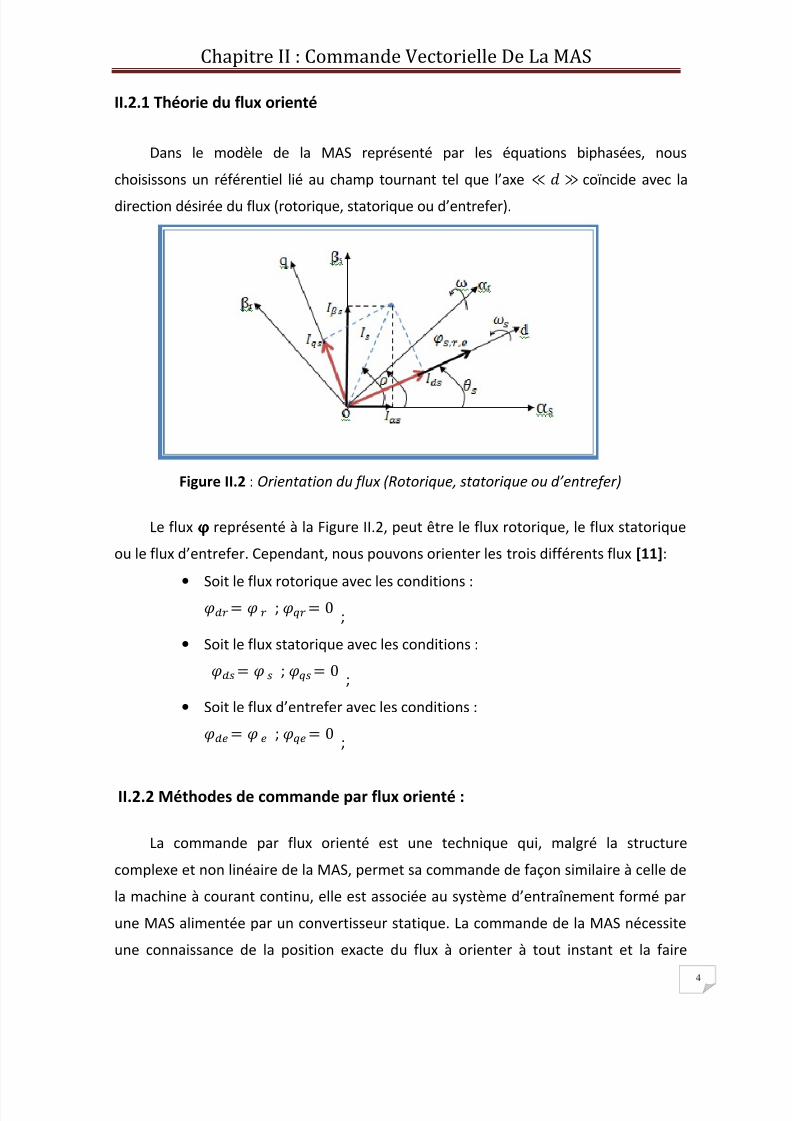
II.2.1 Théorie du lu! orienté
3ans le mod(le de la 0 représenté par les équations 'iphasées, nous
choisissons un référentiel lié au champ tournant tel que l’a&e ≪ ≫ co=ncide avec ladirection désirée du flu& 4rotorique, statorique ou d’entrefer5#
Figure II.2 ; Orientation du flux (Rotorique, tatorique ou d!entrefer"
Le flu&
φφφφ représenté ) la >i!ure #2, peut être le flu& rotorique, le flu& statorique
ou le flu& d’entrefer# ependant, nous pouvons orienter les trois différents flu& [11];• oit le flu& rotorique avec les conditions ; = ? = 0
?
• oit le flu& statorique avec les conditions ; = ? = 0 ?
• oit le flu& d’entrefer avec les conditions ;
= ? = 0 ?
II.2.2 Méthode" de commande #ar lu! orienté :
La commande par flu& orienté est une technique qui, mal!ré la structure
comple&e et non linéaire de la 0, permet sa commande de fa@on similaire ) celle de
la machine ) courant continu, elle est associée au s%st(me d’entranement formé par
une 0 alimentée par un convertisseur statique# La commande de la 0 nécessiteune connaissance de la position e&acte du flu& ) orienter ) tout instant et la faire
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 5/21
Chapitre II : Commande Vectorielle De La MAS
5
co=ncider avec l’a&e directe d tournant ) la vitesse du champ tournant [1$] [%].
hacune de ces méthodes de commande permet d’o'tenir un contr:le de flu&
et un contr:le de couple découplés comme une machine ) courant continu ) e&citation
séparée# e découpla!e permet d’o'tenir de tr(s 'onnes réponses de l’entranementen ré!ime d%namique#
l e&iste deu& approches pour la détermination de la phase du flu& ;
• Ane commande indirecte o. l’an!le de ark est mesuré ) partir de la
pulsation statorique, elle-même reconstituée ) partir de la vitesse de
rotation et la pulsation rotorique, cet an!le est calculé directement ) partir
des !randeurs mesurées ou estimées# l faut donc procéder ) des séries de
mesures au& 'ornes du s%st(me pour trouver le flu& rotorique.
6n estime le flu& rotorique ) partir des courants statoriques mesurés
directement par des capteurs de courant# La pulsation statoriques
ω et l’an!le sθ de
transformation sont aussi estimés#
• Ane commande directe o. la phase du flu& rotorique est mesurée par un
capteur ph%sique ou estimée en utilisant un mod(le d%namique# etteméthode de commande nécessite une 'onne connaissance du module du
flu& et de sa phase, et celle-ci doit être vérifié quelque soit le ré!ime de
fonctionnement#
3eu& solutions sont possi'les suivant qu’on dispose ou non d’un capteur de flu& ;
ommande indirecte utilisant un capteur de flu&#
ommande directe utilisant un estimateur de flu&#
II.2.& Princi#e de la commande ' lu! rotori(ue orienté :
La commande par orientation du flu& consiste ) ré!ler le flu& par une des deu&
composantes du courant et le couple par l’autre composante# our cela, il faut choisir
un s%st(me d’a&es )d* (+ et une loi de commande assurant le découpla!e du couple et
du flu&#
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 6/21
Chapitre II : Commande Vectorielle De La MAS
6
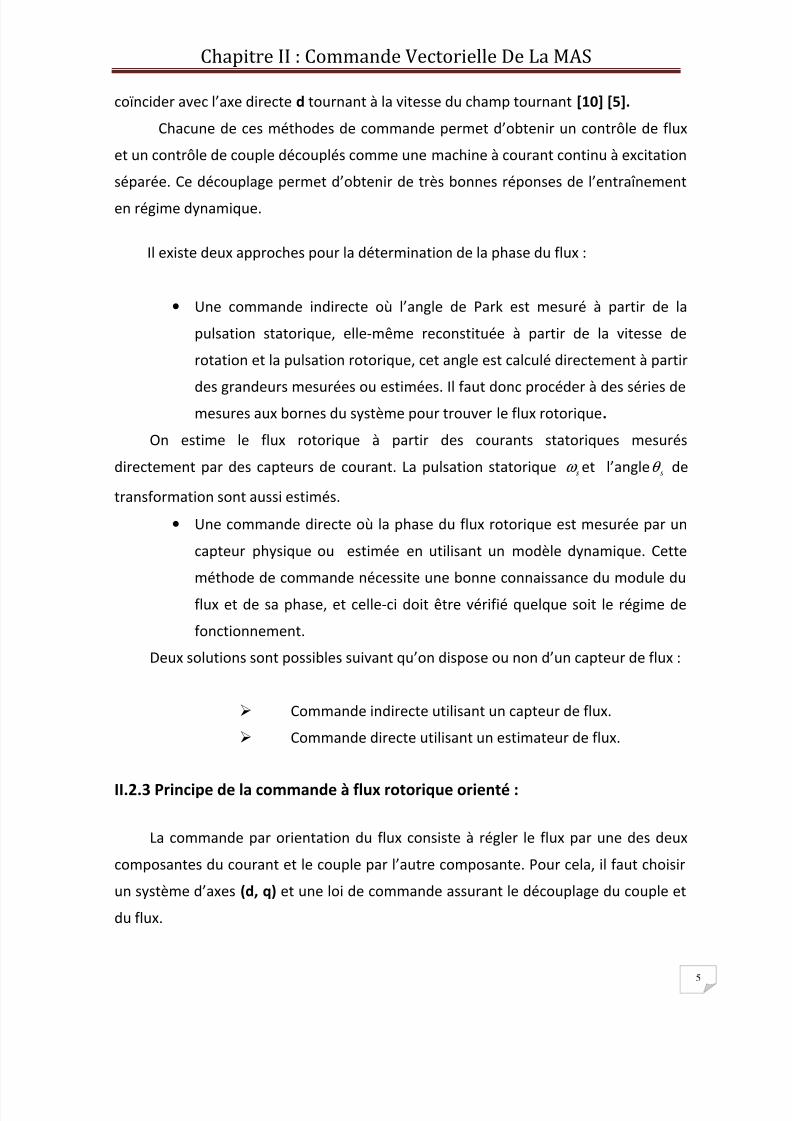
our simplifier la commande, il est nécessaire de faire un choi& $udicieu& de
référentiel# 6n se place donc dans un référentiel d ( lié au champ tournant tel que
l’a&e d co=ncide avec la direction désirée du flu&, fi!ure ##
Figure II.& ; Orientation du flux Rotorique
3ans notre travail, nous nous limitons ) l’orientation du flu& rotorique, car, elle
est la plus utilisé, elle élimine l’influence de réactances de fuite rotorique et statorique
et donne de meilleurs résultats#
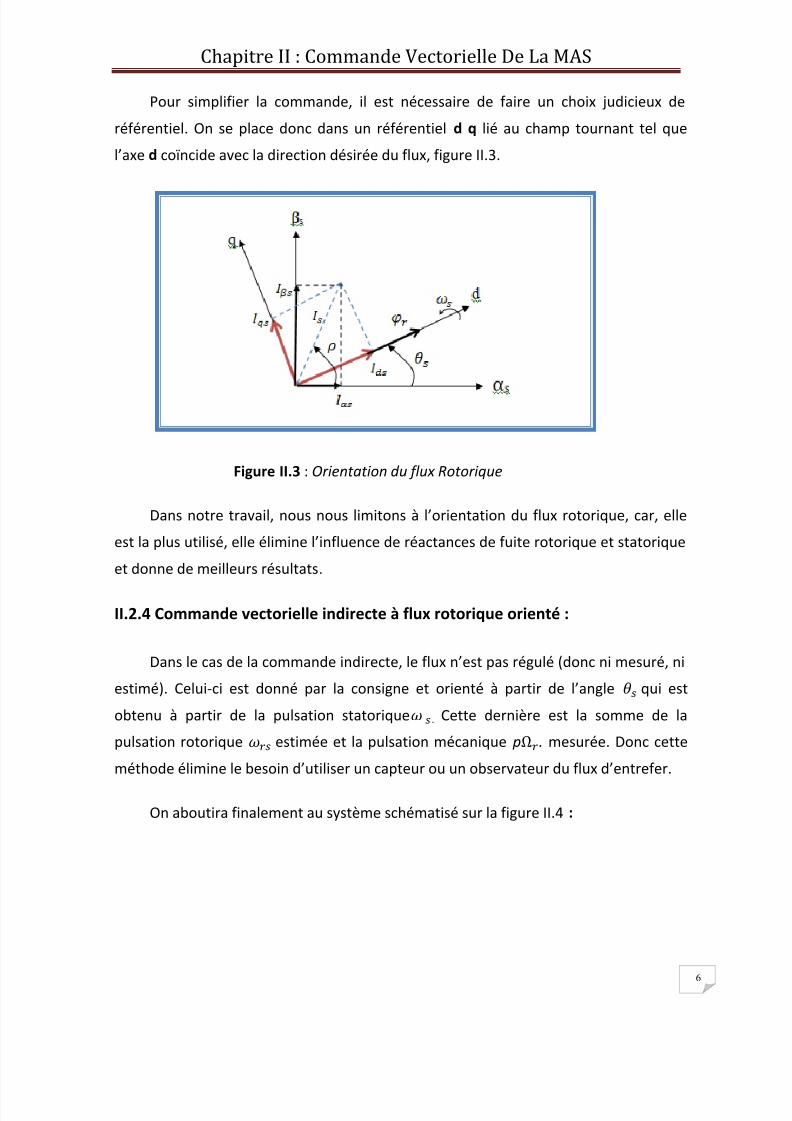
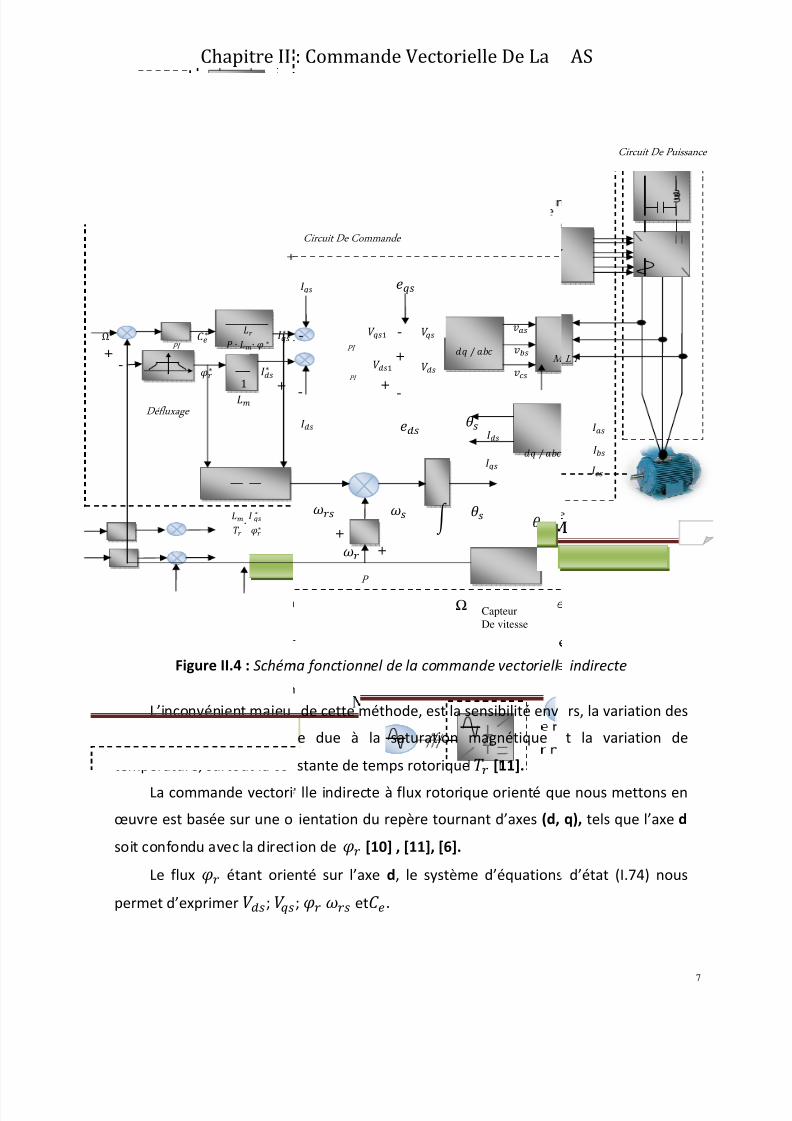
II.2., -ommande vectorielle indirecte ' lu! rotori(ue orienté :
3ans le cas de la commande indirecte, le flu& n’est pas ré!ulé 4donc ni mesuré, ni
estimé5# elui-ci est donné par la consi!ne et orienté ) partir de l’an!le qui est
o'tenu ) partir de la pulsation statorique
# ette derni(re est la somme de la
pulsation rotorique estimée et la pulsation mécanique pΩ# mesurée# 3onc cette
méthode élimine le 'esoin d’utiliser un capteur ou un o'servateur du flu& d’entrefer#
6n a'outira finalement au s%st(me schématisé sur la fi!ure #C :
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 7/21
Chapitre II
Figure II., : Schém
L’inconvénient ma$eu
param(tres de la machitempérature, surtout la co
La commande vectori
Duvre est 'asée sur une o
soit confondu avec la direct
Le flu& étant orie
permet d’e&primer
?
Défluxage
-
+
+
Ω∗ ∗
∗
∗
∗
PI
∙ ∙ ∗
!
" ∙ ∗∗
: Commande Vectorielle De La
a fonctionnel de la commande vectoriell
de cette méthode, est la sensi'ilité env
e due ) la saturation ma!nétiquestante de temps rotorique " [11].
lle indirecte ) flu& rotorique orienté qu
ientation du rep(re tournant d’a&es )d*
ion de [1$] * [11]* [].
nté sur l’a&e d, le s%st(me d’équations
?
et
#
Circuit De Commande
-
-
-
-
+
+
Ω
#
# #
$ % &'(
Capteur
De vitesse
$ % &'(
M
+
+
)P
*
*
+
+ PI
PI
AS
7
indirecte
rs, la variation des
t la variation de
e nous mettons en
(+* tels que l’a&e d
d’état 4#7C5 nous
Circuit De Puissance
L I

7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 8/21
Chapitre II : Commande Vectorielle De La MAS
8
vec , = = 0 Le mod(le de la machine dans le rep(re lié au champ tournant ;
= 23 456 7 89 : 9 ; <;> ? : 3 2 3 3 : ;<@>;> 3 A3B&C = 23 4D6 7 89 : 9 ; <;> ? 7 3 2 3 3 7 ;<;> 3 A3B'C E> = ; <F> 3 : +F> 3 A3B(C
= ; <
F> 34D6
E> A3BC = G ;<;> 3 HI A3B*C
II.2.% /!#re""ion du cou#le électromagnéti(ue :
l découle de l’e&pression du couple électroma!nétique 4#E75 suivante ;
Fotons que la vitesse donnée par l’e&pression dans 4#195 reste inchan!ée#
l devient tout ) fait claire qu’en fi&ant la valeur de ) une valeur de
référence J∗ K le couple ne dépendra que du courant statorique 4comme dans le
cas d’une 0 ) e&citation séparée5, qui est le 'ut de la commande vectorielle#
lors le couple devient ; = G ;<;> 3 A C 4#5
6n pose la constante = G ;<;> 4#C5
L’équation de couple sera ; = A C 4#G5
elle-ci est une équation d’une machine ) courant continu ) e&citation séparée,
et d’une autre par si
= LMNO alors le couple électroma!nétique
= A C
devient contr:la'le linéairement par #
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 9/21
Chapitre II : Commande Vectorielle De La MAS
9
L’équation 4#2d5, si!nifie que si le flu& est éta'li ) sa valeur de référence,
éventuellement par un contr:le linéaire, la pulsation de !lissements devient
proportionnelle ) la composante
, qui est naturellement une composante ima!e du
couple donnée par son équation#
Fous pouvons remarquer d’apr(s les relations 4#G5 et 4#2c5 que seule la
composante directe détermine l’amplitude du flu& rotorique, alors que le couple
ne dépend que de la composante en quadrature si le flu& rotorique est maintenu
constant#
insi, nous avons réalisé la décomposition du courant statorique en deu& termes
correspondants respectivement au flu& et au couple, et par conséquent, nous avons
o'tenu une structure sem'la'le ) celle d’une machine ) courant continu#
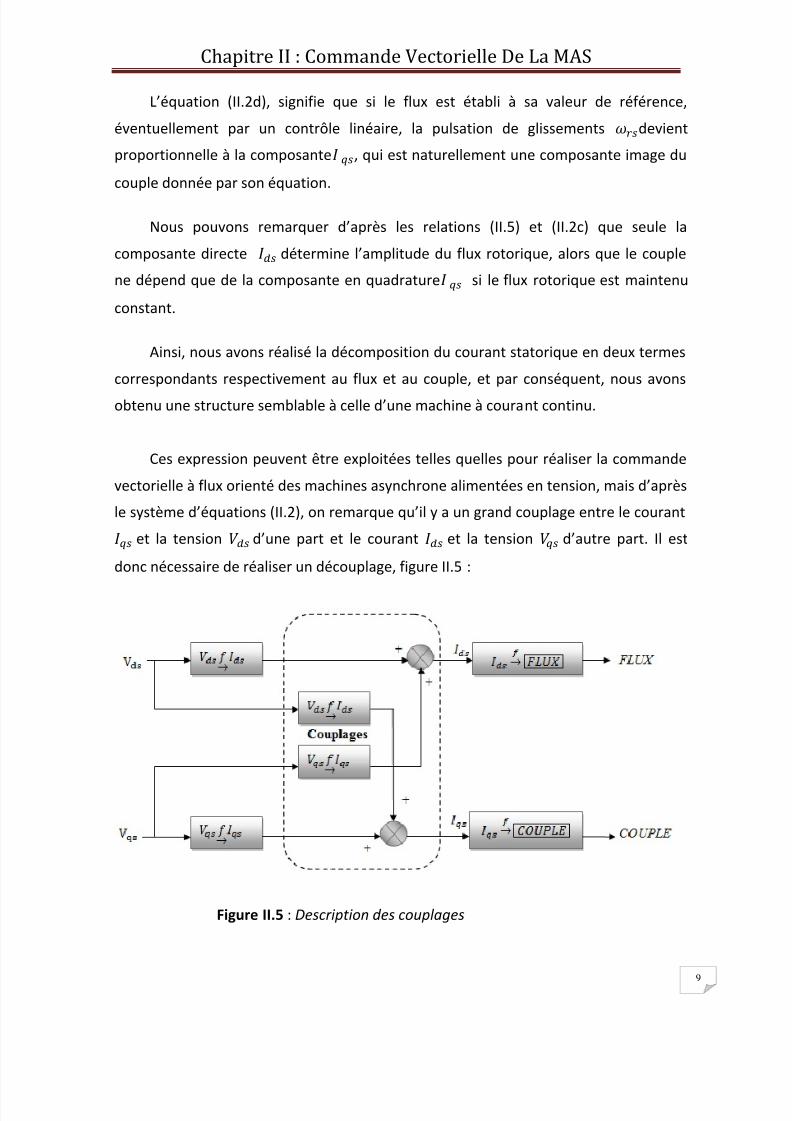
es e&pression peuvent être e&ploitées telles quelles pour réaliser la commande
vectorielle ) flu& orienté des machines as%nchrone alimentées en tension, mais d’apr(s
le s%st(me d’équations 4#25, on remarque qu’il % a un !rand coupla!e entre le courant
et la tension
d’une part et le courant
et la tension
d’autre part# l est
donc nécessaire de réaliser un découpla!e, fi!ure #G ;
Figure II.% ; $ecription de couplage

7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 10/21
Chapitre II : Commande Vectorielle De La MAS
10
II.2.6 Estimation de et de
3ans la commande 6>H la pulsation statorique est déterminée indirectement
depuis, la mesure de la vitesse mécanique et la relation 4#2d5 * afin de maintenir le flu&
nul, il faut mposerED> = 0
partir de l’équation suivant le flu& rotorique devient ; = = 7 4#E5
6n o'tient ;
= :" E > 7 4#75
pr(s l’application de la transformée de la place on trouve le flu& rotorique
s’écrit#
P = ; <+QF> =
/n ré!ime permanent 4#I5
/t de l’équation 4#2e5, le couple est proportionnel ) condition que soit
constant# onsidérons le couple ∗, le flu& ∗ comme référence de commande, nous
inversions les équations de et , on o'tient ;
R = +;< 8" E >∗ 7 ∗? A3S&C = ; >T3;< 3 U VE>∗ A3S'C
J partir des équations 4#9'5 et 4#G75#
= G3 W 7 ; <E>∗F> 3 Avec ∗ = . (.10)
Fous remarquons l’apparition de la constante de temps rotorique, qui est
un param(tre influent sur les performances de cette commande#La position
est déterminée ensuite par l’inté!ration de
;
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 11/21
Chapitre II : Commande Vectorielle De La MAS
11
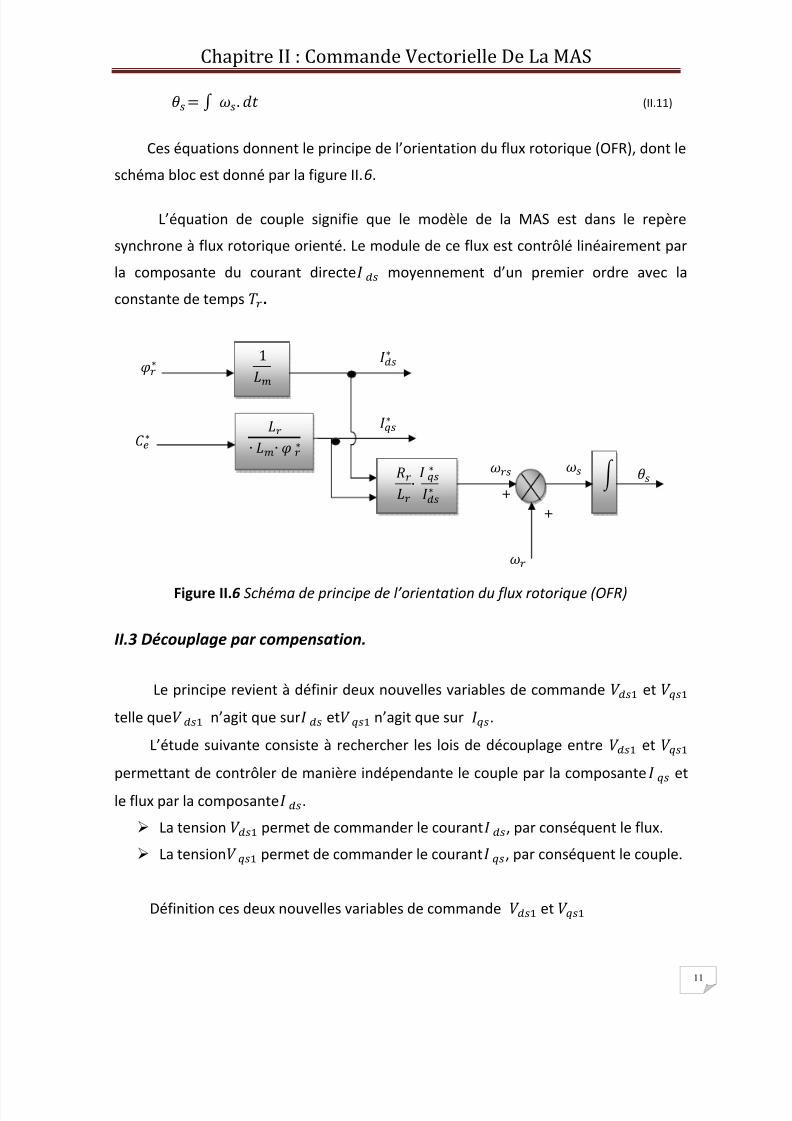
= X 3 O 4#115
es équations donnent le principe de l’orientation du flu& rotorique 46>H5, dont le
schéma 'loc est donné par la fi!ure #%#
L’équation de couple si!nifie que le mod(le de la 0 est dans le rep(re
s%nchrone ) flu& rotorique orienté# Le module de ce flu& est contr:lé linéairement par
la composante du courant directe mo%ennement d’un premier ordre avec la
constante de temps ".
Figure II.6 Schéma de principe de l!orientation du flux rotorique (O&R"
II.3 Découplage par compensation.
Le principe revient ) définir deu& nouvelles varia'les de commande + et +
telle que
+ n’a!it que sur
et
+ n’a!it que sur
#
L’étude suivante consiste ) rechercher les lois de découpla!e entre + et +
permettant de contr:ler de mani(re indépendante le couple par la composante et
le flu& par la composante #
La tension + permet de commander le courant , par conséquent le flu&#
La tension + permet de commander le courant , par conséquent le couple#
3éfinition ces deu& nouvelles varia'les de commande
+ et
+
+
+
∗
∗
!
∙ ∙ ∗
9 ∙ ∗∗ )
∗
∗
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 12/21
Chapitre II : Commande Vectorielle De La MAS
12
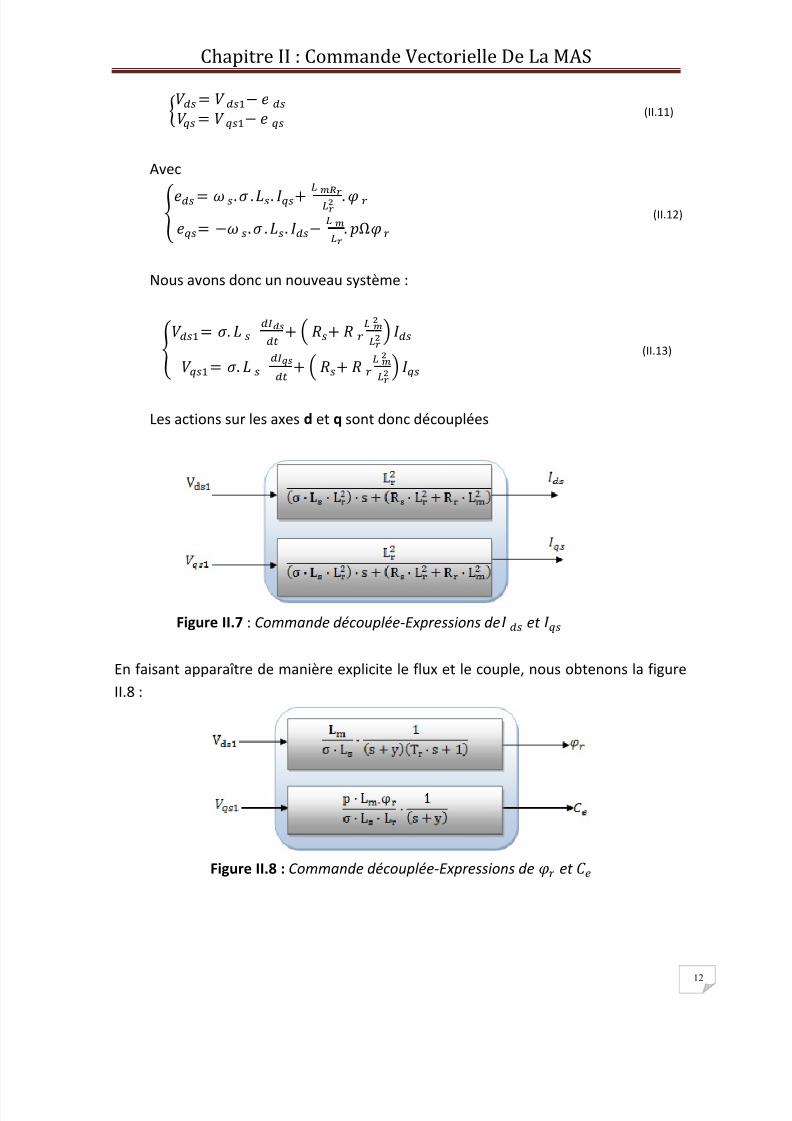
, = + : * = + : * 4#115
vec
R* = 3 2 3 3 7 ; <@>;> 3 * = : 3 2 3 3 : ; <;> 3 GW 4#125
Fous avons donc un nouveau s%st(me ;
R+ = 23 456 7 8 9 7 9 ; <;> ?
+ = 23 4D6 7 8 9 7 9 ; <;> ? 4#15
Les actions sur les a&es d et ( sont donc découplées
Figure II.7 ; Commande découplée'xpreion de et
/n faisant apparatre de mani(re e&plicite le flu& et le couple, nous o'tenons la fi!ure
#I ;
Figure II.0 : Commande découplée'xpreion de et
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 13/21
Chapitre II : Commande Vectorielle De La MAS
13
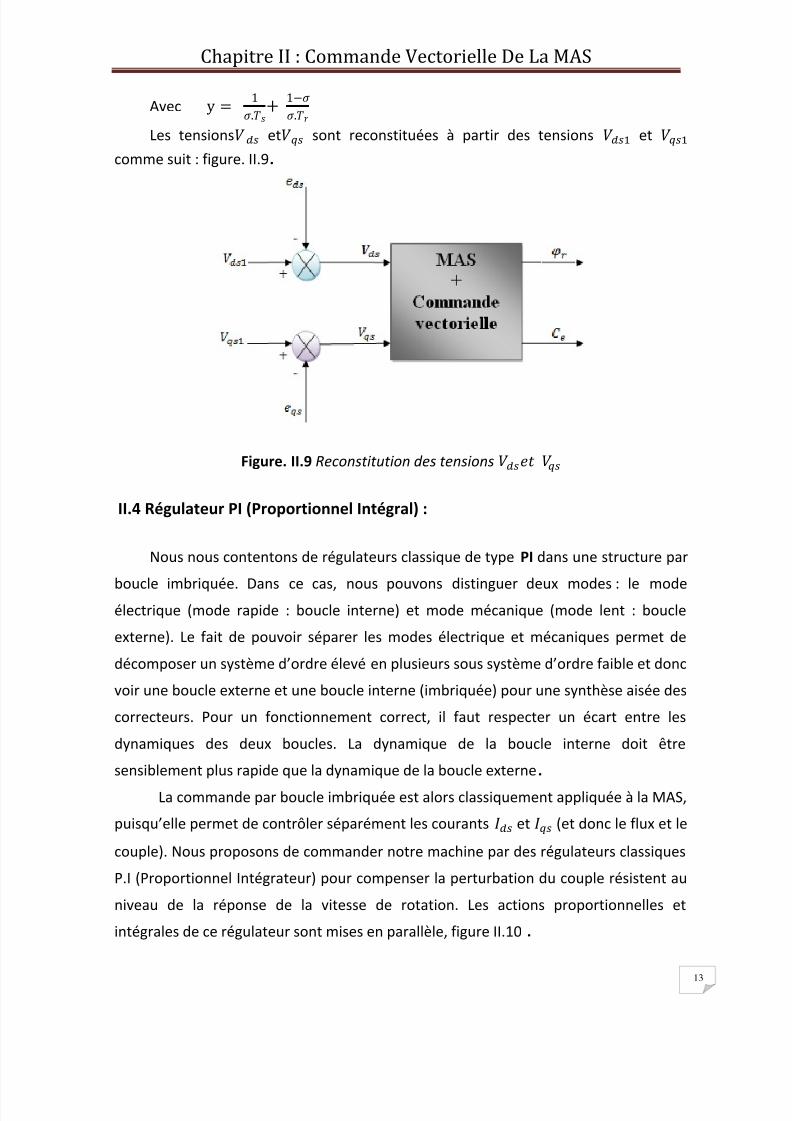
vec Y = !23"N 7 !:223"J
Les tensions et sont reconstituées ) partir des tensions + et +
comme suit ; fi!ure# #9.
Figure. II. Recontitution de tenion *O
II., égulateur PI )Pro#ortionnel Intégral+ :
Fous nous contentons de ré!ulateurs classique de t%pe PI dans une structure par
'oucle im'riquée# 3ans ce cas, nous pouvons distin!uer deu& modes ; le mode
électrique 4mode rapide ; 'oucle interne5 et mode mécanique 4mode lent ; 'oucle
e&terne5# Le fait de pouvoir séparer les modes électrique et mécaniques permet de
décomposer un s%st(me d’ordre élevé en plusieurs sous s%st(me d’ordre fai'le et donc
voir une 'oucle e&terne et une 'oucle interne 4im'riquée5 pour une s%nth(se aisée des
correcteurs# our un fonctionnement correct, il faut respecter un écart entre les
d%namiques des deu& 'oucles# La d%namique de la 'oucle interne doit être
sensi'lement plus rapide que la d%namique de la 'oucle e&terne.
La commande par 'oucle im'riquée est alors classiquement appliquée ) la 0,
puisqu’elle permet de contr:ler séparément les courants et 4et donc le flu& et le
couple5# Fous proposons de commander notre machine par des ré!ulateurs classiques
# 4roportionnel nté!rateur5 pour compenser la pertur'ation du couple résistent au
niveau de la réponse de la vitesse de rotation# Les actions proportionnelles et
inté!rales de ce ré!ulateur sont mises en parall(le, fi!ure #18 .
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 14/21
Chapitre II : Commande Vectorielle De La MAS
14
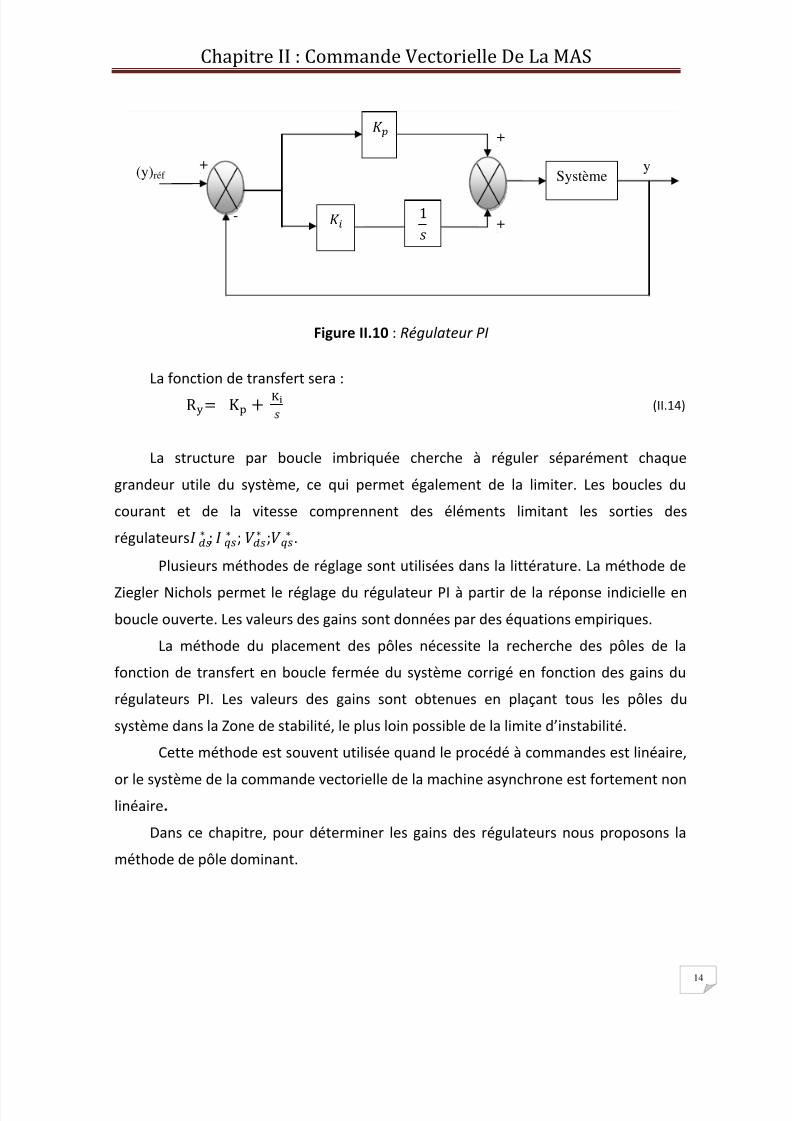
Figure II.1$ ; Régulateur )I
La fonction de transfert sera ;Z[ = \] 7 ^_N 4#1C5
La structure par 'oucle im'riquée cherche ) ré!uler séparément chaque
!randeur utile du s%st(me, ce qui permet é!alement de la limiter# Les 'oucles du
courant et de la vitesse comprennent des éléments limitant les sorties des
ré!ulateurs
∗
` ∗ ?
∗ ?
∗ #
lusieurs méthodes de ré!la!e sont utilisées dans la littérature# La méthode de
Kie!ler Fichols permet le ré!la!e du ré!ulateur ) partir de la réponse indicielle en
'oucle ouverte# Les valeurs des !ains sont données par des équations empiriques#
La méthode du placement des p:les nécessite la recherche des p:les de la
fonction de transfert en 'oucle fermée du s%st(me corri!é en fonction des !ains du
ré!ulateurs # Les valeurs des !ains sont o'tenues en pla@ant tous les p:les du
s%st(me dans la Kone de sta'ilité, le plus loin possi'le de la limite d’insta'ilité#
ette méthode est souvent utilisée quand le procédé ) commandes est linéaire,
or le s%st(me de la commande vectorielle de la machine as%nchrone est fortement non
linéaire.
3ans ce chapitre, pour déterminer les !ains des ré!ulateurs nous proposons la
méthode de p:le dominant#
+
N∗
+
N
∗
-
+
N
∗
y(y)réf Système
T
n !N
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 15/21
Chapitre II : Commande Vectorielle De La MAS
15
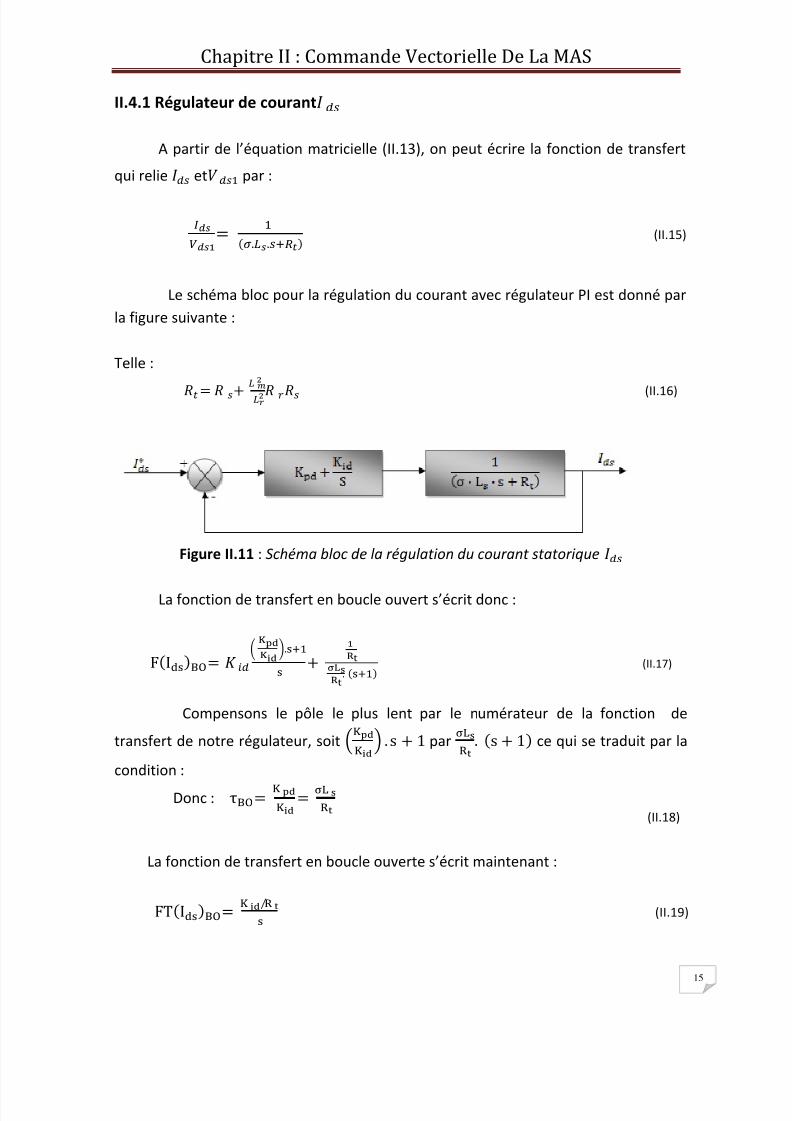
II.,.1 égulateur de courant
partir de l’équation matricielle 4#15, on peut écrire la fonction de transfert
qui relie
et
+ par ;
456o56p = +Aq3;63QrsC 4#1G5
Le schéma 'loc pour la ré!ulation du courant avec ré!ulateur est donné par
la fi!ure suivante ;
elle ; 9 = 9 7 ; <;> 9 9 4#1E5
Figure II.11 ; Schéma *loc de la régulation du courant tatorique
La fonction de transfert en 'oucle ouvert s’écrit donc ;
tAuvwCxy = n z |_ ~3wQ+w 7 p•€‚ƒ•€ 3 AwQ+C 4#175
ompensons le p:le le plus lent par le numérateur de la fonction de
transfert de notre ré!ulateur, soit 8^|^_ ? 3 „ 7 ! par …†ƒ‡€ 3 A„ 7 !C ce qui se traduit par la
condition ;
3onc ;
ˆxy = ^ |^_ = …† ƒ‡€ 4#1I5
La fonction de transfert en 'oucle ouverte s’écrit maintenant ;
taAuvwCxy = ^ _ ‡ €%
w 4#195
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 16/21
Chapitre II : Commande Vectorielle De La MAS
16
3onc la fonction de transfert en 'oucle fermée est donnée par ; ta‰t = Š‹xy+QŠ‹xy
/t la fonction de transfert en 'oucle fermée sera donc ;
taAuvwCxŠ = ^ _ ‡ €%wQA^_ ‡ €% C = ++QA‡€ ^ _% C3w
(#285
lors nous o'tenons une réponse t%pe 1er ordre de constante de tempsˆv = ‡ €^_ el que Œˆv = B„
Les param(tres du ré!ulateur sont alors
Rn = r sŽ5 T = ^ _3M3†ƒrs 4#195
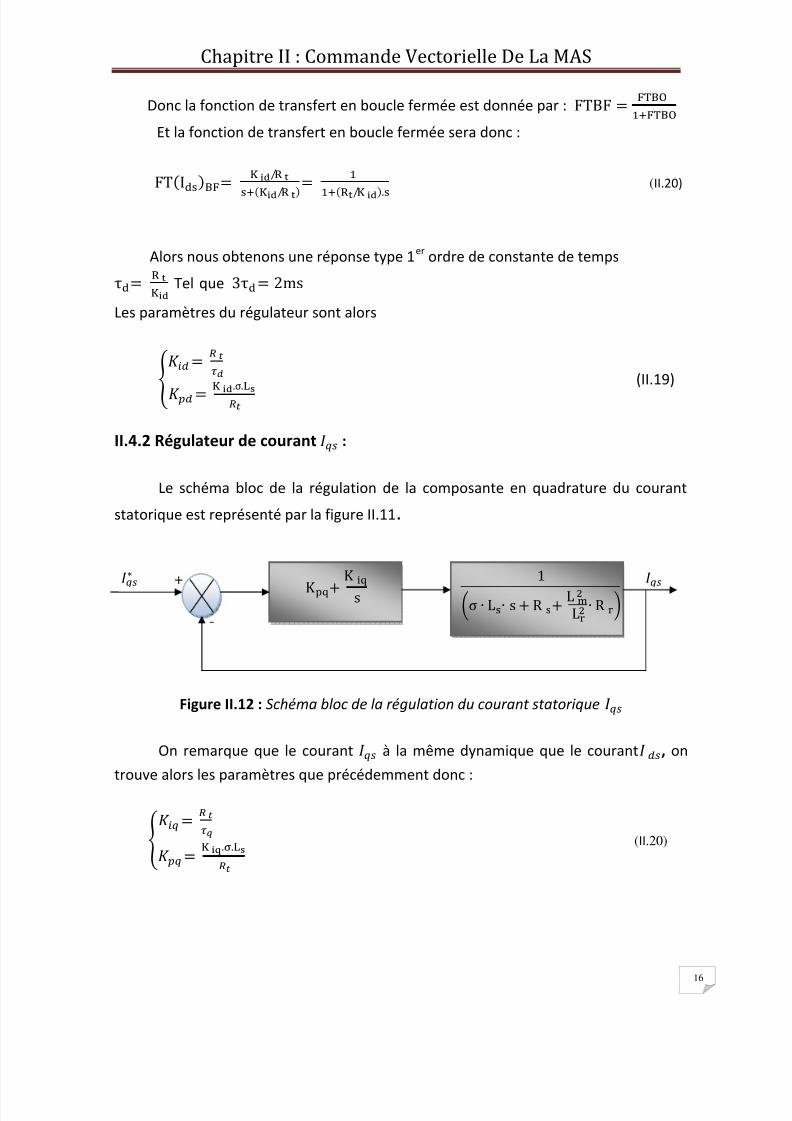
II.,.2 égulateur de courant :
Le schéma 'loc de la ré!ulation de la composante en quadrature du courant
statorique est représenté par la fi!ure #11.
Figure II.12 : Schéma *loc de la régulation du courant tatorique
6n remarque que le courant ) la même d%namique que le courant * on
trouve alors les param(tres que précédemment donc ;
Rn = r sŽD T = ^ _3…3†ƒrs
(.20)
-
+
N
∗ ∗ !z ∙ ‘w ∙ „ 7 Z w 7 ‘ ’“‘”“ ∙ Z ”~ \] 7 \ –„
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 17/21
Chapitre II : Commande Vectorielle De La MAS
17
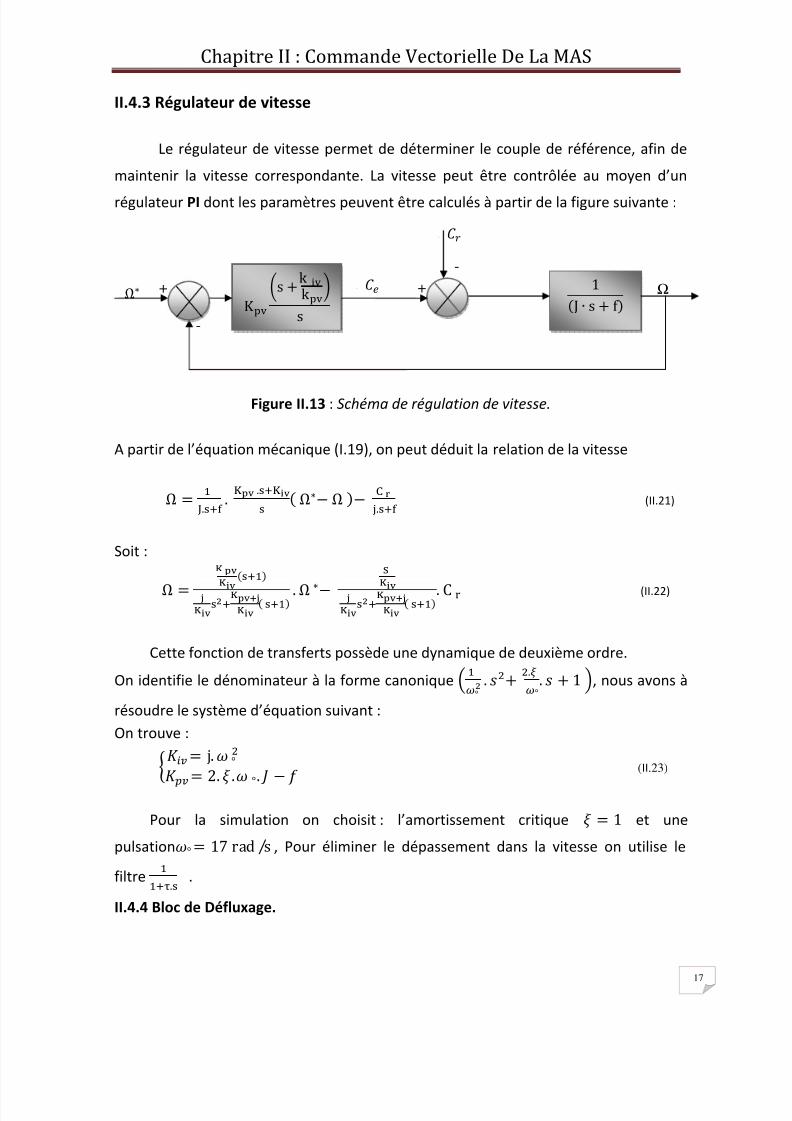
II.,.& égulateur de vite""e
Le ré!ulateur de vitesse permet de déterminer le couple de référence, afin de
maintenir la vitesse correspondante# La vitesse peut être contr:lée au mo%en d’un
ré!ulateur PI dont les param(tres peuvent être calculés ) partir de la fi!ure suivante ;
Figure II.1& ; Schéma de régulation de vitee#
partir de l’équation mécanique 4#195, on peut déduit la relation de la vitesse
W = +—3wQ 3 ^|™ 3wQ^_™w A W∗ : W C : š ›œ3wQ 4#215
oit ; W = |™_™ AwQ+C_™wQ|™ž_™ A wQ+C 3 W ∗ : Ÿ_™_™wQ|™ž_™ A wQ+C 3 ” 4#225
ette fonction de transferts poss(de une d%namique de deu&i(me ordre#
6n identifie le dénominateur ) la forme canonique 8 +¡¢ 3 N“ 7 “3£¡¢ 3 N 7 ! ?, nous avons )
résoudre le s%st(me d’équation suivant ;
6n trouve ;, n¤ = ¥3 ¢“ T¤ = B3 ¦3 ¢3 § : (.23)
our la simulation on choisit ; l’amortissement critique ¦ = ! et une
pulsation¢ = !© ªb« „% , our éliminer le dépassement dans la vitesse on utilise le
filtre ++Q¬3w #
II.,., 3loc de 4élu!age.
-
N
∗
+N
∗
-
+ Ω Ω∗ !A- ∙ „ 7 ® C \]¯
z„ 7 ° –¯°]¯~„
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 18/21
Chapitre II : Commande Vectorielle De La MAS
18
0 1 2 3 4-50
0
50
100
150
200Vitesse
Temps(s)
V i t e s s e ( r d / s )
Vit réf
Vit
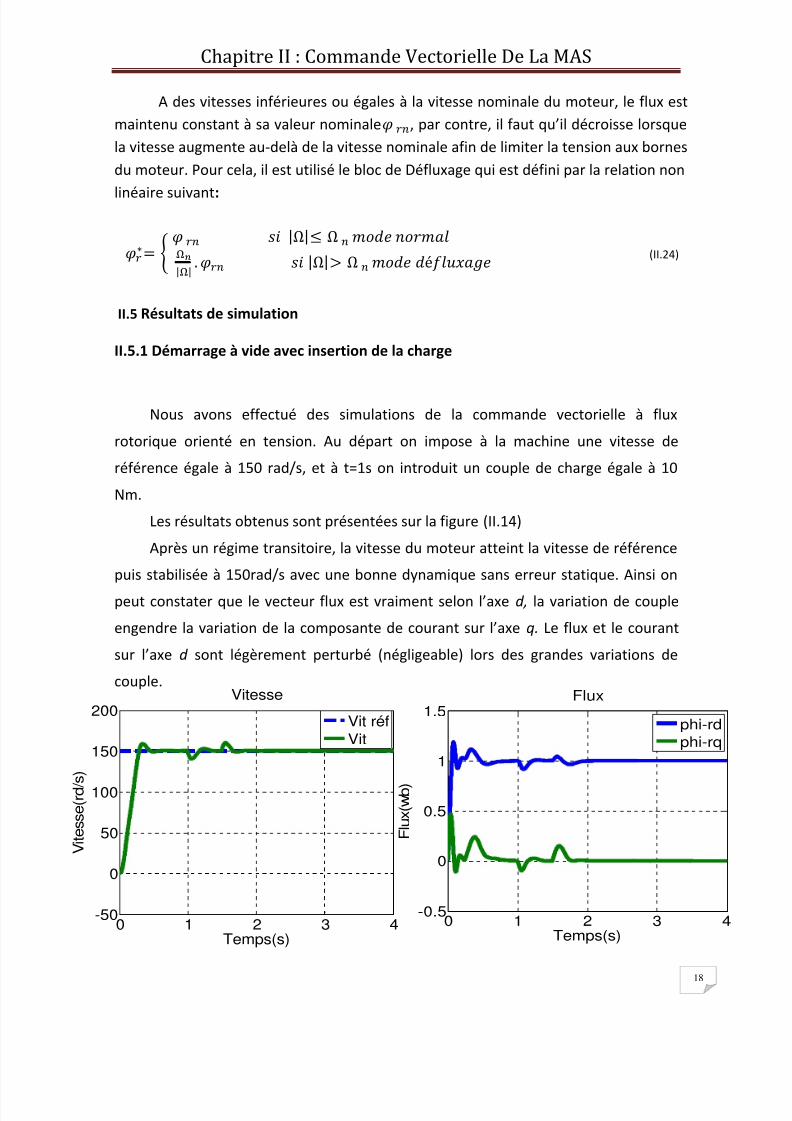
des vitesses inférieures ou é!ales ) la vitesse nominale du moteur, le flu& est
maintenu constant ) sa valeur nominale ±, par contre, il faut qu’il décroisse lorsque
la vitesse au!mente au-del) de la vitesse nominale afin de limiter la tension au& 'ornes
du moteur# our cela, il est utilisé le 'loc de 3éflu&a!e qui est défini par la relation non
linéaire suivant:
∗ = P ± N² ³W³ ´ W ± µL* MLJµ&¶·¸³·³ 3 ± N² ³W³ ¹ W ± µL* h¨¶º»&¼* 4#2C5
II.% é"ultat" de "imulation
II.%.1 4émarrage ' vide avec in"ertion de la charge
Fous avons effectué des simulations de la commande vectorielle ) flu&
rotorique orienté en tension# u départ on impose ) la machine une vitesse de
référence é!ale ) 1G8 rad+s, et ) tN1s on introduit un couple de char!e é!ale ) 18
Fm#
Les résultats o'tenus sont présentées sur la fi!ure 4#1C5
pr(s un ré!ime transitoire, la vitesse du moteur atteint la vitesse de référencepuis sta'ilisée ) 1G8rad+s avec une 'onne d%namique sans erreur statique# insi on
peut constater que le vecteur flu& est vraiment selon l’a&e d, la variation de couple
en!endre la variation de la composante de courant sur l’a&e q# Le flu& et le courant
sur l’a&e d sont lé!(rement pertur'é 4né!li!ea'le5 lors des !randes variations de
couple#
0 1 2 3 4
-0.5
0
0.5
1
1.5Flux
Temps(s)
F l u x ( w b )
phi-rd
phi-rq
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 19/21
Chapitre II : Commande Vectorielle De La MAS
19
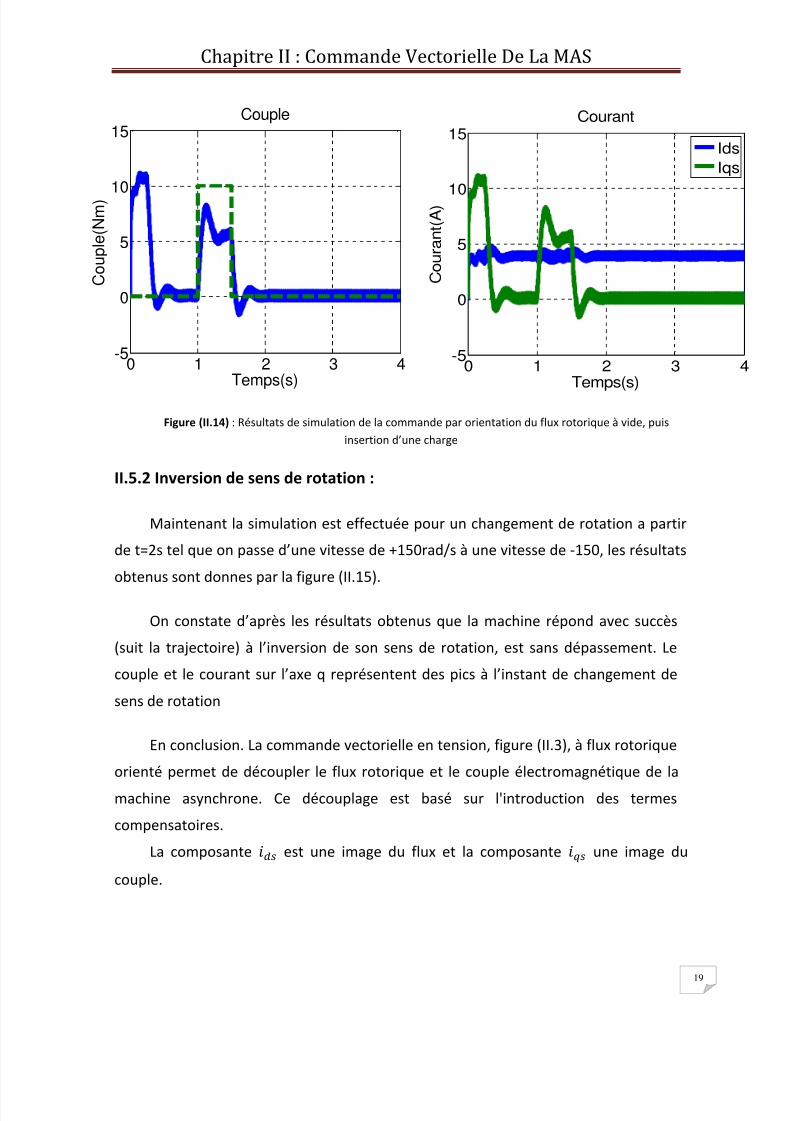
Figure )II.1,+ ; Hésultats de simulation de la commande par orientation du flu& rotorique ) vide, puis
insertion d’une char!e
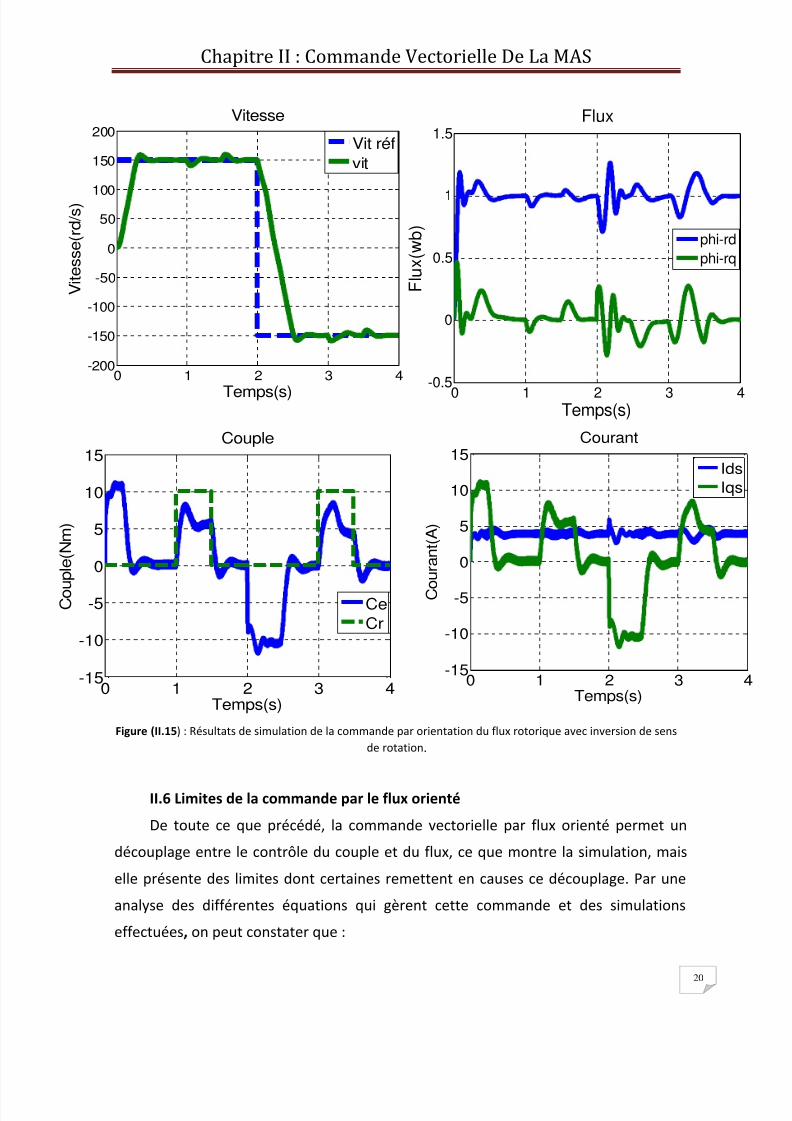
II.%.2 Inver"ion de "en" de rotation :
0aintenant la simulation est effectuée pour un chan!ement de rotation a partir
de tN2s tel que on passe d’une vitesse de O1G8rad+s ) une vitesse de -1G8, les résultatso'tenus sont donnes par la fi!ure 4#1G5#
6n constate d’apr(s les résultats o'tenus que la machine répond avec succ(s
4suit la tra$ectoire5 ) l’inversion de son sens de rotation, est sans dépassement# Le
couple et le courant sur l’a&e q représentent des pics ) l’instant de chan!ement de
sens de rotation
/n conclusion# La commande vectorielle en tension, fi!ure 4#5, ) flu& rotorique
orienté permet de découpler le flu& rotorique et le couple électroma!nétique de la
machine as%nchrone# e découpla!e est 'asé sur lPintroduction des termes
compensatoires#
La composante ² est une ima!e du flu& et la composante ² une ima!e du
couple#
0 1 2 3 4
-5
0
5
10
15Couple
Temps(s)
C o u p l e ( N m )
0 1 2 3 4
-5
0
5
10
15Courant
Temps(s)
C o u r a n t ( A )
Ids
Iqs
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 20/21
Chapitre II : Commande Vectorielle De La MAS
20
0 1 2 3 4-15
-10
-5
0
5
10
15
Temps(s)
C o u p l e ( N m )
Couple
Ce
Cr
Figure )II.1%5 ; Hésultats de simulation de la commande par orientation du flu& rotorique avec inversion de sens
de rotation.
II. 5imite" de la commande #ar le lu! orienté
3e toute ce que précédé, la commande vectorielle par flu& orienté permet un
découpla!e entre le contr:le du couple et du flu&, ce que montre la simulation, mais
elle présente des limites dont certaines remettent en causes ce découpla!e# ar une
anal%se des différentes équations qui !(rent cette commande et des simulations
effectuées* on peut constater que ;
0 1 2 3 4-200
-150
-100
-50
0
50
100
150
200
Temps(s)
V i t e s s e ( r d / s )
Vitesse
Vit réf
vit
0 1 2 3 4-0.5
0
0.5
1
1.5Flux
Temps(s)
F l u x ( w b )
phi-rd
phi-rq
0 1 2 3 4-15
-10
-5
0
5
10
15Courant
Temps(s)
C o u r a n
t ( A )
Ids
Iqs
7/25/2019 Cours Commande Vectobhrielle
http://slidepdf.com/reader/full/cours-commande-vectobhrielle 21/21
Chapitre II : Commande Vectorielle De La MAS
21
Le calcul de la pulsation an!ulaire donné par 4# 25 est tr(s sensi'le au 'ais de la
mesure de Q A = GΩ C constituant une !randeur a'solue la composante principale
de
#
La détermination de est elle-même tr(s sensi'le ) l’erreur d’identification
sur " donc sur la résistance rotorique 9 #
L’implantation de la commande s’effectue nécessairement en temps discret, ce
qui soul(ve une difficulté dans le cas d’une modélisation en 4d, q5#
-onclu"ion
e chapitre nous a permis de présenter la commande vectorielle de la machine
as%nchrone alimentée en tension par orientation du flu& rotorique#
La commande vectorielle par orientation de flu& rotorique assure un découpla!e
entre la composante de flu& et le couple, mal!ré les pertur'ations# ependant, le
point fai'le de cette commande est sa fai'le ro'ustesse vis-)-vis des variations
paramétriques qui s’introduisent dans les différents calculs des !randeurs emplo%ées
par la commande vectorielle 4ré!ulateur de vitesse, de couple, et l’estimateur5#
Fous constatons ) travers cette commande que les performances dépendent
des correcteurs qui sont dimensionnés ) 'ase du principe du p:le dominant# Les
résultats sont satisfaisants tant que le s%st(me est invariant#
An chan!ement de la constante de temps rotorique peut entraner une
insta'ilité du s%st(me#
ette commande sera comparée dans le troisi(me chapitre avec celle de la
commande par linéarisation entrées-sorties#