Embed Size (px)
Citation preview
COURS DE
PLASTICITE ET CALCUL A LA RUPTURE
RAPPELS ELEMENTAIRES DE
MECANIQUE DES MILIEUX CONTINUS
ET DES STRUCTURES
PATRICK DE BUHAN
2020-2021

2
3
Département GCC Le 5 février 2021
Note à l’attention des étudiants du cours de
«Plasticité et calcul à la rupture»
Le polycopié qui vous est distribué ci-joint comprend des rappels de Mécanique
des Milieux Continus et des Structures indispensables à la bonne compréhension
et au suivi dans de bonnes conditions du cours de «Plasticité et Calcul à la rupture»
qui va bientôt débuter. Il vous est donc vivement recommandé d’en prendre
préalablement connaissance.
Bonne lecture et à bientôt!
Pour l’équipe enseignante,
Patrick de BUHAN

4
5
PREAMBULE
Le présent document a pour objectif de rappeler brièvement les notions essentielles de
Mécanique des Milieux Continus ainsi que de Mécanique des Structures, considérées comme des
prérequis indispensables dont il est fait abondamment usage tant dans le cours de Plasticité, que
dans celui de Calcul à la Rupture : déformations linéarisées, contraintes, équilibre, puissances
virtuelles, résolution de problèmes d’élasticité. On pourra se reporter au cours de Mécanique de
première année de l’ENPC de L. Dormieux, pour un exposé plus exhaustif de ces notions et de
leur mise en œuvre, ainsi qu’au cours de Mécanique des milieux continus de J. Salençon,
enseigné à l’Ecole polytechnique1.
* *
*
1 J. Salençon (2002) Mécanique des milieux continus. Éditions de l’École polytechnique, Palaiseau; 824 pages ;
Ellipses, Paris.

6
7
MECANIQUE
DES
MILIEUX CONTINUS

8
9
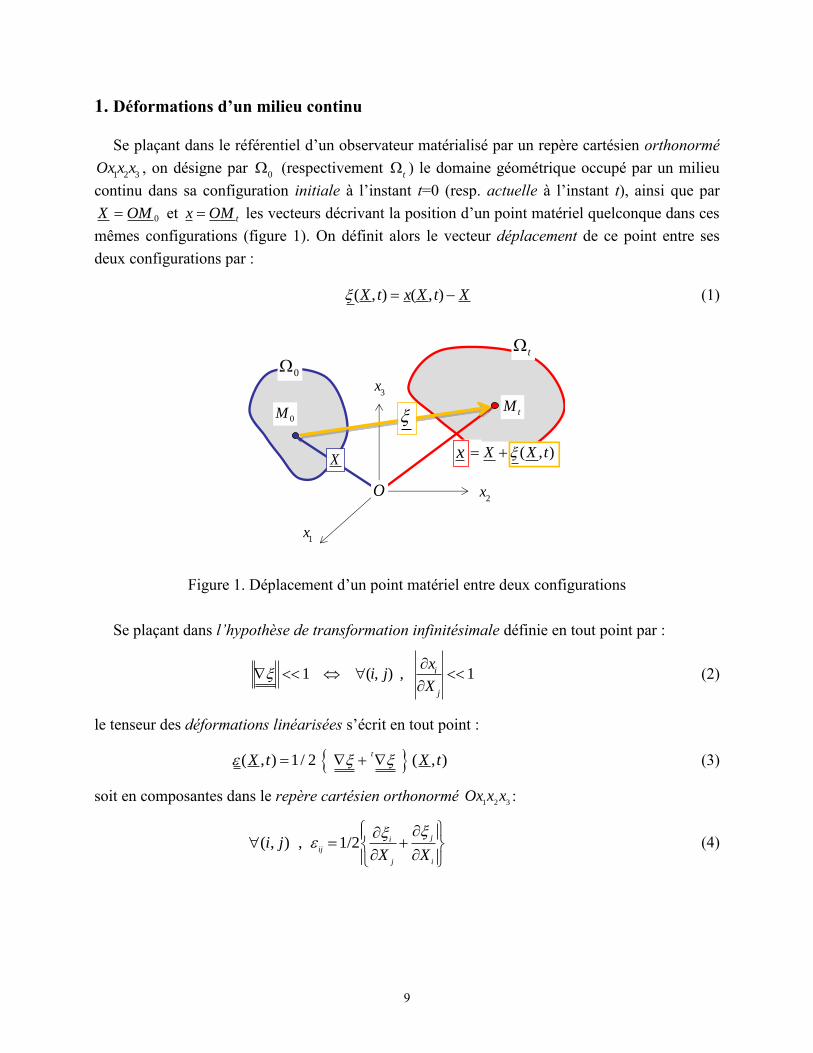
1. Déformations d’un milieu continu
Se plaçant dans le référentiel d’un observateur matérialisé par un repère cartésien orthonormé
321xxOx , on désigne par
0 (respectivement
t ) le domaine géométrique occupé par un milieu
continu dans sa configuration initiale à l’instant t=0 (resp. actuelle à l’instant t), ainsi que par
0OMX et tOMx les vecteurs décrivant la position d’un point matériel quelconque dans ces
mêmes configurations (figure 1). On définit alors le vecteur déplacement de ce point entre ses
deux configurations par :
XtXxtX ),(),( (1)
0t
0M
X
tM
x
),( tXX
1x
2x
3x
O
Figure 1. Déplacement d’un point matériel entre deux configurations
Se plaçant dans l’hypothèse de transformation infinitésimale définie en tout point par :
1 , ),( 1
j
i
X
xji (2)
le tenseur des déformations linéarisées s’écrit en tout point :
( , ) 1/ 2 ( , )t
X t X t (3)
soit en composantes dans le repère cartésien orthonormé 1 2 3
Ox x x :
( , ) , 1/2 ji
ij
j i
i jX X
(4)

10
ces déformations étant des grandeurs sans dimension, petites devant l’unité compte tenu de
l’hypothèse de transformation infinitésimale (2). En pratique, on peut alors confondre les
coordonnées initiales i
X et actuelles i
x 1, et écrire :
, ,( , ) , 1/2 1/2
ji
ij i j j i
j i
i jx x
(5)
Etant donné un champ de déformations quelconque, un tel champ est dit géométriquement
compatible s’il dérive au sens de la relation (5) d’un champ de déplacement. Les conditions de
compatibilité géométrique d’un tel champ s’écrivent en coordonnées cartésiennes orthonormées :
,... avec 02
,,,,,
lk
ij
klijikjljlikijklklijxx
(6)
Nous verrons dans le cours de Plasticité que la question de l’incompatibilité géométrique des
déformations plastiques est une question essentielle.
On définit la vitesse à l’instant t d’un point matériel comme la dérivée par rapport au temps du
déplacement de ce point :
),(),(),( tXtXt
tXU
(7)
soit en tenant compte de l’hypothèse de transformation infinitésimale :
),(),( txtxU (8)
et le tenseur des taux de déformation s’écrit :
( , ) 1/ 2 grad grad ( , ) ( , )t
d x t U U x t x t (9)
ou encore en composantes :
1/2 1/2 , ),(,, ijji
i
j
j
iijij
UUx
U
x
Udji
(10)
Exemples.
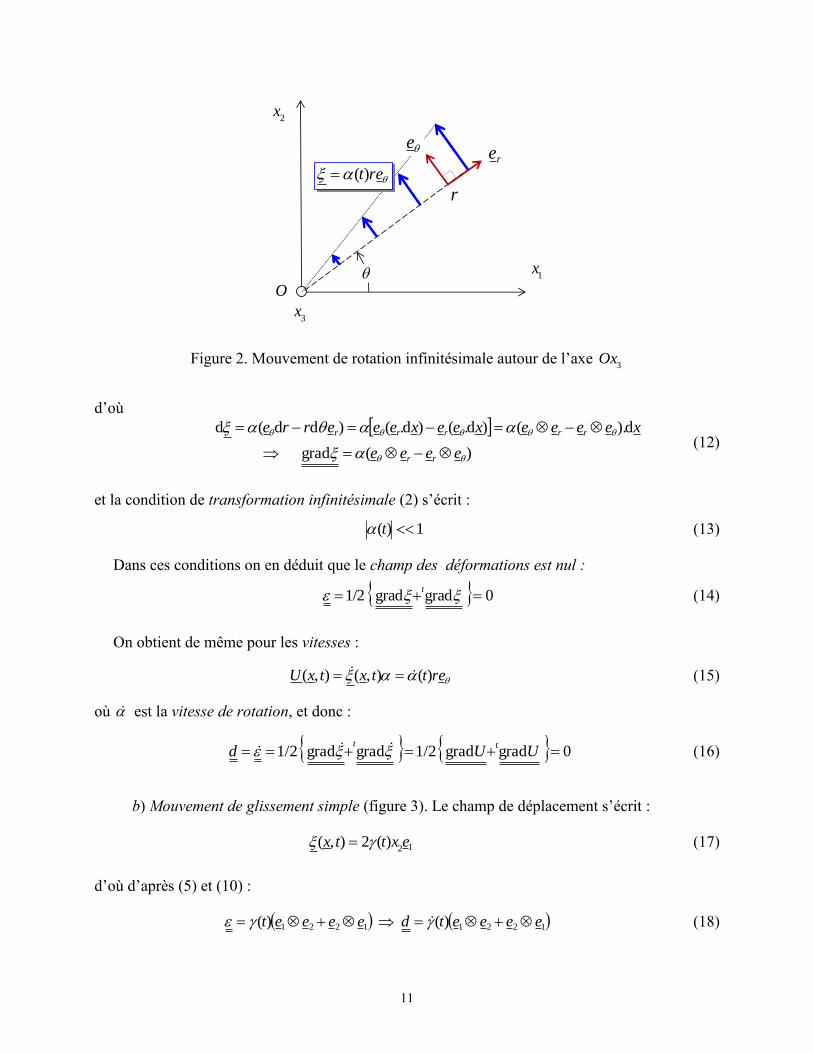
a) Mouvement de rotation plan (figure 2). Un tel mouvement est défini en coordonnées
cylindriques par un champ de déplacement de la forme :
erttx )(),( (11)
1…ainsi que les gradients par rapport à ces mêmes coordonnées, notés respectivement (.) et grad(.) .
11
O1
x
2x
3x
ert)(
ere
r
Figure 2. Mouvement de rotation infinitésimale autour de l’axe 3
Ox
d’où
)(grad
d).()d.()d.()dd(d
eeee
xeeeexeexeeerre
rr
rrrrr
(12)
et la condition de transformation infinitésimale (2) s’écrit :
1)( t (13)
Dans ces conditions on en déduit que le champ des déformations est nul :
0 gradgrad 1/2 t
(14)
On obtient de même pour les vitesses :
erttxtxU )(),(),( (15)
où est la vitesse de rotation, et donc :
0 gradgrad 1/2 gradgrad 1/2 UUdtt
(16)
b) Mouvement de glissement simple (figure 3). Le champ de déplacement s’écrit :
12)(2),( exttx (17)
d’où d’après (5) et (10) :
12211221 )( )( eeeetdeeeet (18)

12
O1
x
2x
3x
12)(2 ext
4/
Figure 3. Mouvement de glissement simple en transformation infinitésimale
Les valeurs principales de la déformation dans le plan 21
xOx sont et associées
respectivement aux deux bissectrices du repère, la troisième direction 3
Ox étant associée à une
déformation nulle (déformations planes). Les résultats sont similaires pour le taux de
déformation.
Il convient par ailleurs de remarquer que le mouvement de glissement simple est isochore,
c’est-à-dire que les déformations se produisent à volume constant, puisque la déformation
volumique en tout point est nulle :
0divtr,
iiii
1 (19)
la condition étant identique pour le taux de déformation volumique :
0divtr,
UUddiiii
(20)
2. Contraintes dans un milieu continu
2.1 Tenseur des contraintes de Cauchy
Les contraintes dans un milieu continu sont définies sur la configuration actuelle de ce milieu
par un champ de tenseurs symétriques du second ordre, noté (contraintes de Cauchy) :
jiijjiijee , (21)
de sorte que le vecteur-contrainte agissant sur un facette matérielle de ce milieu de normale
unitaire n s’écrit :
ijijennnT . )( (22)
1…avec convention de sommation sur les indices muets répétés.
13
de sorte que ij
peut s’interpréter comme la ième composante du vecteur contrainte agissant sur
la facette de normale je :
ijjiji eeeTe . .)( . (23)
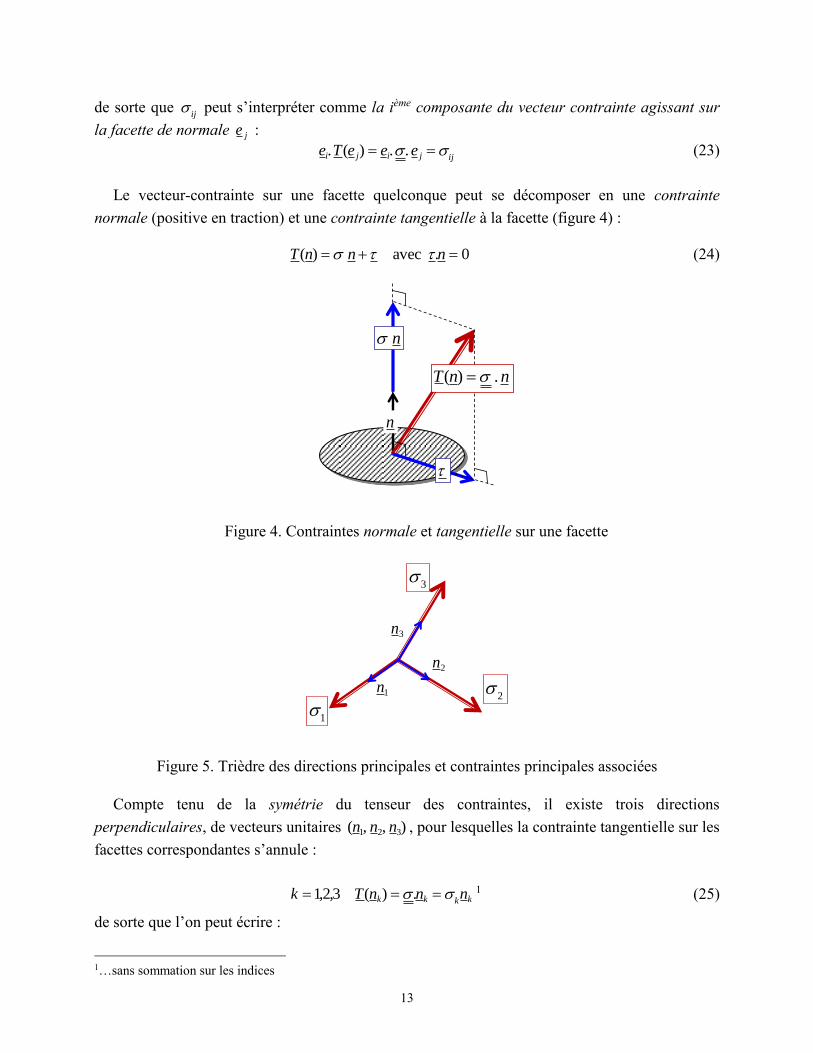
Le vecteur-contrainte sur une facette quelconque peut se décomposer en une contrainte
normale (positive en traction) et une contrainte tangentielle à la facette (figure 4) :
0. avec )( nnnT (24)
n
n
nnT . )(
Figure 4. Contraintes normale et tangentielle sur une facette
1n
2n
3n
1
2
3
Figure 5. Trièdre des directions principales et contraintes principales associées
Compte tenu de la symétrie du tenseur des contraintes, il existe trois directions
perpendiculaires, de vecteurs unitaires ) , ,( 321 nnn , pour lesquelles la contrainte tangentielle sur les
facettes correspondantes s’annule :
kkkk nnnTk .)( 3,2,1 1 (25)
de sorte que l’on peut écrire :
1…sans sommation sur les indices

14
333222111nnnnnn (26)
k désignant la contrainte principale correspondant à la direction principale associée à kn
(figure 5).
1
23
)(nT
Figure 6. Représentation d’un état de contrainte dans le plan de Mohr
La représentation d’un état de contrainte dans le plan de Mohr est illustrée sur la figure 6.
Etant donné un tel état de contrainte dont les valeurs principales sont telles que 321
, le
vecteur-contrainte agissant sur une facette quelconque est tel que son extrémité parcourt le
domaine compris entre le «grand» cercle de Mohr de diamètre 31
et les deux «petits» cercles
de diamètres 21
et 32
quand on fait varier l’orientation de la facette. Le cas particulier
où la normale à cette facette est située dans le plan des contraintes principales extrêmes ),(31
,
inclinée d’un angle par rapport à la direction de la contrainte principale majeure 1
, est
représenté sur la figure 7.
1
3
)(nT
2/)(31
2
)(nT
1
3
n
Figure 7. Représentation de Mohr dans le cas où la normale à la facette est située dans le plan
des contraintes principales extrêmes.
Le tenseur des contraintes peut être décomposé comme suit en parties sphérique et
déviatorique:

15
1 / 3 1 / 3 soit (tr )1ij ij kk ij
s s (27)
où s désigne le déviateur de contrainte, qui est de trace nulle, et 1 est le tenseur identité.
2.2 Equilibre-champs de contrainte statiquement admissibles
Dans le cas où le champ de contrainte de Cauchy est continûment différentiable par rapport
aux coordonnées d’espace, les équations d’équilibre, s’écrivent dans la cas de la statique (c’est-à-
dire en négligeant les force d’inertie) en coordonnées cartésiennes orthonormées :
0
i
j
ij Fx
(28)
soit en notation intrinsèque :
0div F (29)
où F désigne la densité volumique d’efforts extérieurs à distance (exemple de la pesanteur).
n
nnnT . .)(
Figure 8. Condition de saut à la traversée d’une surface de discontinuité d’un champ de
contrainte.
Cette équation d’équilibre doit être complétée par l’équation aux discontinuités valable dans le
cas où le champ de contrainte est discontinu au travers d’une surface. Cette équation s’écrit :
0 . ).(
nn (30)
où
représente la discontinuité du champ de contrainte au franchissement de la
surface de discontinuité en suivant la normale n à cette surface (figure 8). En d’autres termes,
la condition (30) exprime la continuité du vecteur-contrainte à la traversée de cette surface.
Un champ de contrainte est alors dit statiquement admissible (S.A.) s’il vérifie :

16
l’équation d’équilibre (29) avec des forces de volume données F=Fd en tout point où il
est continûment différentiable
l’équation aux discontinuités (30) à la traversée des surfaces de discontinuité
de ce
champ ;
les conditions aux limites en contraintes, qui peuvent être définies comme suit :
iTijijiSxxTxnxxT )()()()( d (31)
où iTS désigne la partie de la frontière du domaine occupé par le milieu continu sur
la laquelle la ième composante i
T du vecteur-contrainte agissant en tout point de cette
frontière est donnée. Quelques exemples couramment rencontrés de telles conditions aux
limites en contrainte sont donnés ci-dessous.
TS
n0dT
TS
n
npT d
)(a )(b
Figure 9 (a) : surface libre de contrainte ; (b) : surface soumise à une pression uniforme
a) Surface libre de contrainte (figure 9(a)) : nullité du vecteur-contrainte (mais pas du tenseur
des contraintes !) :
0)( . d TnTn (32)
b) Surface soumise à une pression uniforme p (figure 9(b)) :
0 , )(.d
pnpTnTn (33)
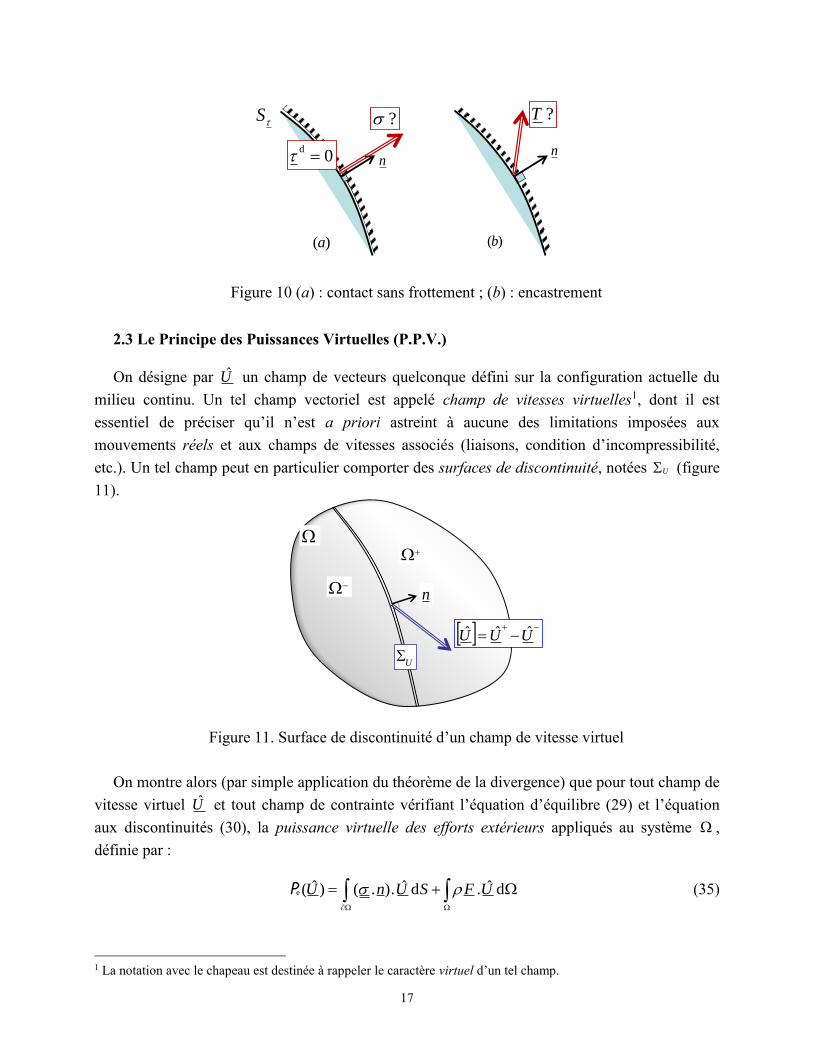
c) Surface en contact sans frottement (ou lisse) avec une paroi (figure 10(a)). La condition aux
limites en contrainte consiste à écrire que la contrainte tangentielle est nulle, la contrainte
normale étant indéterminée :
0)(d nnT (34)
d) Surface en contact parfaitement adhérent avec une paroi : encastrement (figure 10(b)). Il n’y
a aucune condition portant sur le vecteur-contrainte, qui reste arbitraire.
17
S
nn
)(a )(b
0d
? T?
Figure 10 (a) : contact sans frottement ; (b) : encastrement
2.3 Le Principe des Puissances Virtuelles (P.P.V.)
On désigne par U un champ de vecteurs quelconque défini sur la configuration actuelle du
milieu continu. Un tel champ vectoriel est appelé champ de vitesses virtuelles1, dont il est
essentiel de préciser qu’il n’est a priori astreint à aucune des limitations imposées aux
mouvements réels et aux champs de vitesses associés (liaisons, condition d’incompressibilité,
etc.). Un tel champ peut en particulier comporter des surfaces de discontinuité, notées U (figure
11).
n
U
UUU ˆˆˆ
Figure 11. Surface de discontinuité d’un champ de vitesse virtuel
On montre alors (par simple application du théorème de la divergence) que pour tout champ de
vitesse virtuel U et tout champ de contrainte vérifiant l’équation d’équilibre (29) et l’équation
aux discontinuités (30), la puissance virtuelle des efforts extérieurs appliqués au système ,
définie par :
eˆ ˆ ˆ( ) ( . ). d . dU n U S F U
P (35)
1 La notation avec le chapeau est destinée à rappeler le caractère virtuel d’un tel champ.

18
est égale à la puissance virtuelle de déformation1, dont l’expression est donnée par :
dˆˆ ˆ( ) ( . ) d ( . ). d
U
U d n U
P (36)
où d est le taux de déformation virtuel défini par :
ˆgradˆgrad 1/2 ˆ UUdt
(37)
et ˆ U le saut de vitesse virtuelle à la traversée de la surface de discontinuité de vitesse en
suivant la normale n (figure 11). Le P.P.V. s’écrit donc :
e d
div 0 dans \ˆ ˆ ˆ, tel que : ( ) ( )
. 0 sur
FU U U
n
P P (38)
Il est important de noter que le P.P.V. n’exprime rien d’autre que la dualisation mathématique
des équations d’équilibre. Il n’a en particulier aucun rapport avec de quelconques considérations
énergétiques ou thermodynamiques. Il constitue en revanche un outil essentiel pour la mise en
œuvre de l’approche cinématique par l’extérieur du Calcul à la Rupture (voir le cours
correspondant).
3. Elasticité
3.1 Comportement élastique en transformation infinitésimale
Dans l’hypothèse où le milieu continu est en transformation infinitésimale isotherme
(température maintenue constante), le comportement élastique d’un matériau s’exprime par une
relation de type :
:0
C (39)
où désigne la contrainte de Cauchy dans la configuration actuelle, 0
la contrainte dans l’état
initial, tandis que représente la déformation (linéarisée) calculée entre les deux configurations.
C et le tenseur des modules d’élasticité, caractéristique du comportement du matériau.
Dans le cas où ce dernier est isotrope, l’équation (39) devient :
0(tr )1 2 (40)
où de manière équivalente :
0 0
1( ) tr( )1
E E
(41)
1 La puissance des quantités d’accélération est négligée.
19
faisant apparaître les coefficients de Lamé et , ainsi que le module d’Young E et le coefficient
de Poisson , entre lesquels existent les relations suivantes :
)1(2 ;
)21)(1(
)(2 ;
23
EE
E
(42)
ces coefficients étant astreints à respecter les conditions suivantes :
0 , 0 , 3 2 0 , 1 1/2E (43)
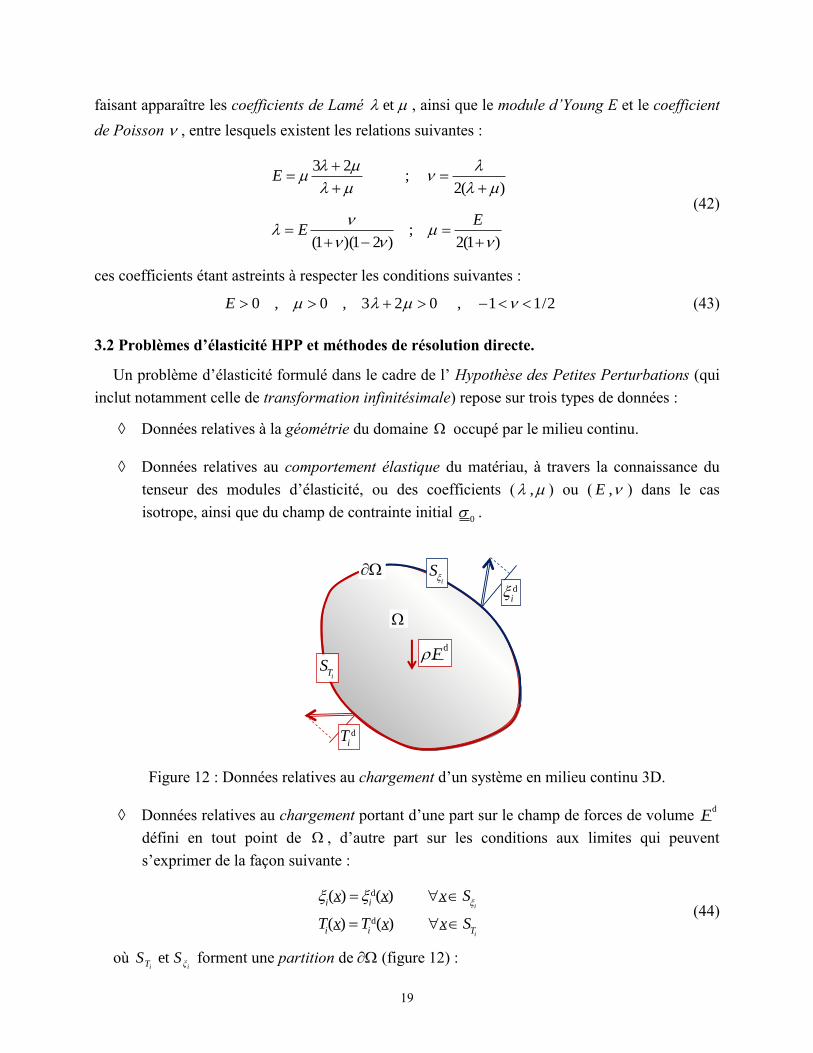
3.2 Problèmes d’élasticité HPP et méthodes de résolution directe.
Un problème d’élasticité formulé dans le cadre de l’ Hypothèse des Petites Perturbations (qui
inclut notamment celle de transformation infinitésimale) repose sur trois types de données :
Données relatives à la géométrie du domaine occupé par le milieu continu.
Données relatives au comportement élastique du matériau, à travers la connaissance du
tenseur des modules d’élasticité, ou des coefficients ( , ) ou ( , E ) dans le cas
isotrope, ainsi que du champ de contrainte initial 0
.
i
S
iTS
dF
di
di
T
Figure 12 : Données relatives au chargement d’un système en milieu continu 3D.
Données relatives au chargement portant d’une part sur le champ de forces de volume d
F
défini en tout point de , d’autre part sur les conditions aux limites qui peuvent
s’exprimer de la façon suivante :
i
i
Tii
ii
SxxTxT
Sxxx
)()(
)()(
d
d
(44)
où ii ξT S S et forment une partition de (figure 12) :
20
iiii ξTξT
S , SSSΩ (45)
Les relations (45) expriment qu’en tout point du bord doivent être données 3 composantes
orthogonales entre elles pour l'ensemble des deux vecteurs contrainte T et déplacements .
Ces données permettent de définir d’une part l’ensemble des champs de contraintes
statiquement admissibles (S.A.) avec les données en efforts:
dd , avec S.A.
iTFS (46)
c’est-à-dire vérifiant les équations d’équilibre et les conditions aux limites en contrainte, d’autre
part l’ensemble des champs de déplacements cinématiquement admissibles (C.A.) avec les
données en déplacements :
d ; sur ii i TS C (47)
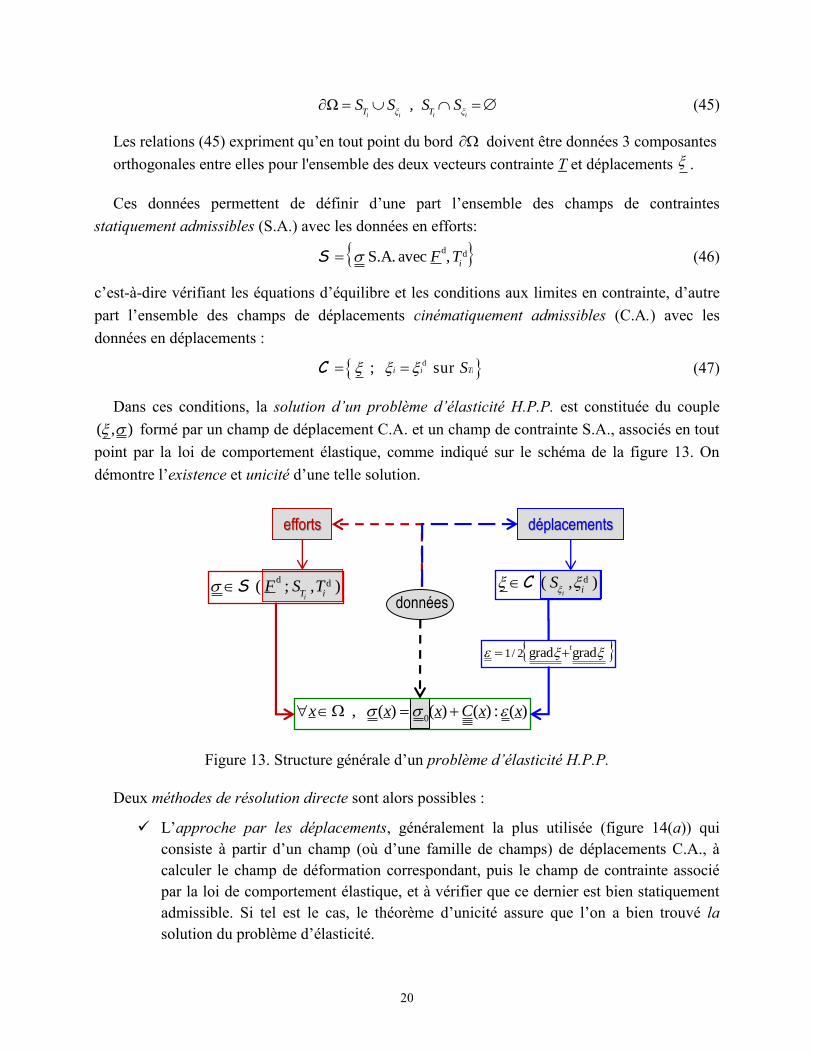
Dans ces conditions, la solution d’un problème d’élasticité H.P.P. est constituée du couple
( , ) formé par un champ de déplacement C.A. et un champ de contrainte S.A., associés en tout
point par la loi de comportement élastique, comme indiqué sur le schéma de la figure 13. On
démontre l’existence et unicité d’une telle solution.
) , ; ( dd
iTTSF
i
S
)(:)()()( , 0
xxCxxx
) , ( dii
S
C
gradgrad 2/1 t
données
déplacementsefforts
Figure 13. Structure générale d’un problème d’élasticité H.P.P.
Deux méthodes de résolution directe sont alors possibles :
L’approche par les déplacements, généralement la plus utilisée (figure 14(a)) qui
consiste à partir d’un champ (où d’une famille de champs) de déplacements C.A., à
calculer le champ de déformation correspondant, puis le champ de contrainte associé
par la loi de comportement élastique, et à vérifier que ce dernier est bien statiquement
admissible. Si tel est le cas, le théorème d’unicité assure que l’on a bien trouvé la
solution du problème d’élasticité.
21
) , ; ( dd
iTTSF
i
S
)(:)()()(
0xxCxx
x
) , ( dii
S
C
gradgrad 2/1 t
(a)
) , ; ( dd
iTTSF
i
S
)()( :)()(
0
1xxxCx
x
) , ( dii
S
C
gradgrad 2/1 t
(b)
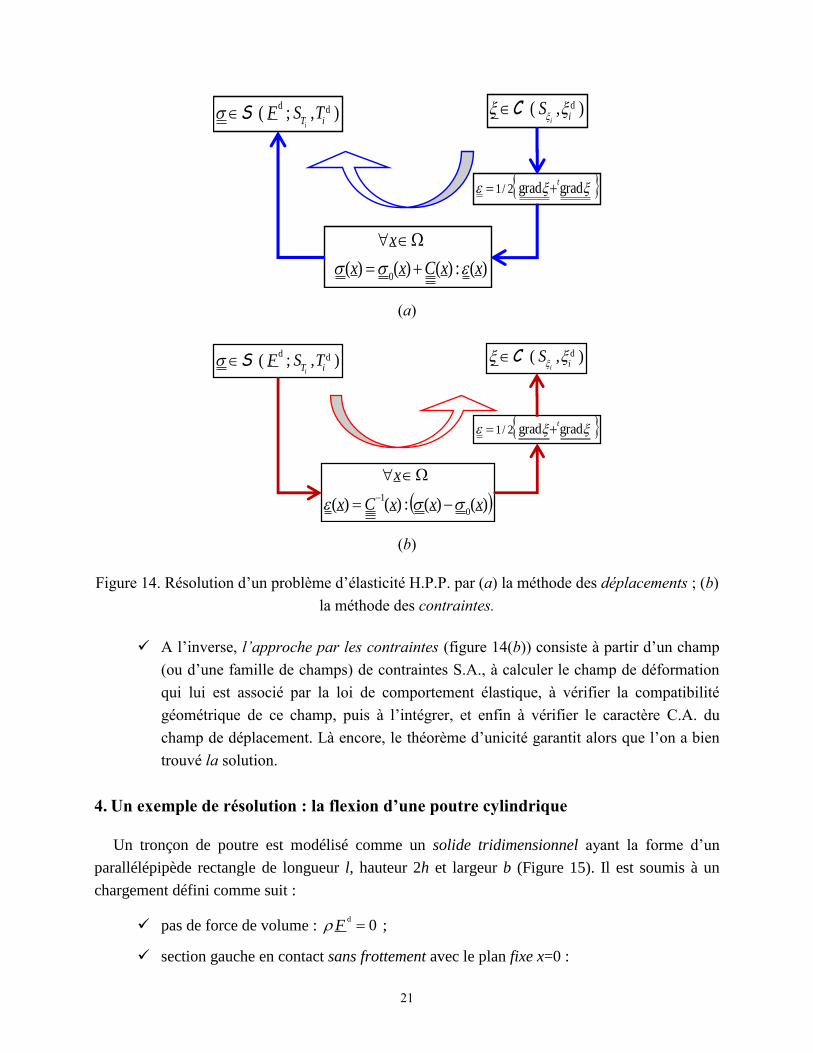
Figure 14. Résolution d’un problème d’élasticité H.P.P. par (a) la méthode des déplacements ; (b)
la méthode des contraintes.
A l’inverse, l’approche par les contraintes (figure 14(b)) consiste à partir d’un champ
(ou d’une famille de champs) de contraintes S.A., à calculer le champ de déformation
qui lui est associé par la loi de comportement élastique, à vérifier la compatibilité
géométrique de ce champ, puis à l’intégrer, et enfin à vérifier le caractère C.A. du
champ de déplacement. Là encore, le théorème d’unicité garantit alors que l’on a bien
trouvé la solution.
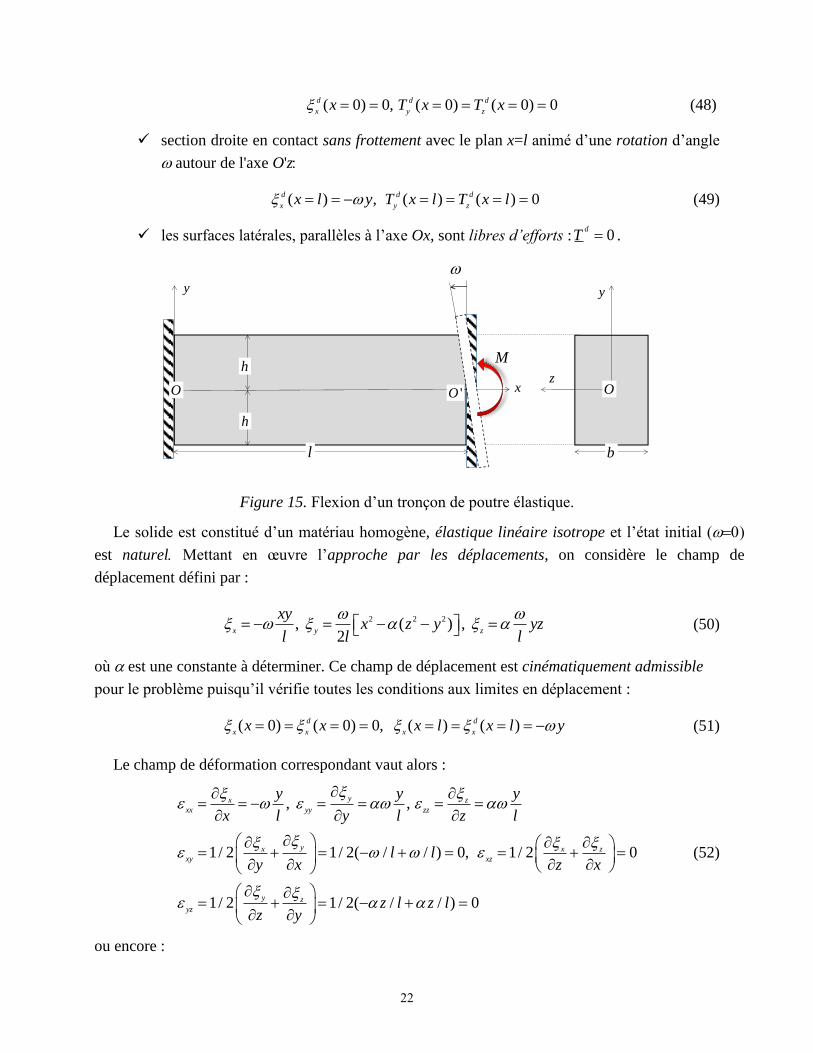
4. Un exemple de résolution : la flexion d’une poutre cylindrique
Un tronçon de poutre est modélisé comme un solide tridimensionnel ayant la forme d’un
parallélépipède rectangle de longueur l, hauteur 2h et largeur b (Figure 15). Il est soumis à un
chargement défini comme suit :
pas de force de volume : d
0F ;
section gauche en contact sans frottement avec le plan fixe x=0 :
22
( 0) 0, ( 0) ( 0) 0d d d
x y zx T x T x (48)
section droite en contact sans frottement avec le plan x=l animé d’une rotation d’angle
autour de l'axe O'z
( ) , ( ) ( ) 0d d d
x y zx l y T x l T x l (49)
les surfaces latérales, parallèles à l’axe Ox, sont libres d’efforts : 0d
T .
l
h
h
b
x
y y
zO 'O O
M
Figure 15. Flexion d’un tronçon de poutre élastique.
Le solide est constitué d’un matériau homogène, élastique linéaire isotrope et l’état initial (
est naturel Mettant en œuvre l’approche par les déplacements, on considère le champ de
déplacement défini par :
2 2 2, ( ) , 2
x y z
xyx z y yz
l l l
(50)
où est une constante à déterminer. Ce champ de déplacement est cinématiquement admissible
pour le problème puisqu’il vérifie toutes les conditions aux limites en déplacement :
( 0) ( 0) 0, ( ) ( )d d
x x x xx x x l x l y (51)
Le champ de déformation correspondant vaut alors :
, ,
1/ 2 1/ 2( / / ) 0, 1/ 2 0
1/ 2 1/ 2( / / ) 0
yx z
xx yy zz
yx x z
xy xz
y z
yz
y y y
x l y l z l
l ly x z x
z l z lz y
(52)
ou encore :

23
1 0 0
( ) ( ) 0 0
0 0
x x y y z z
y ye e e e e e
l l
(53)
c’est-à-dire que les directions principales de déformation sont les axes du repère Oxyz, les
déformations principales étant proportionnelles à y.
Le champ de contrainte associé par la loi de comportement élastique linéaire qui s’écrit dans le
cas général :
(tr )11 1 2
E
(54)
est alors le suivant :
(2 1)1 1 2 1 1 2
2 1(2 1) 1
1 1 2 1 1 2
autres 0
yy zz
xx
ij
E y E y
l l
E y E y
l l
(55)
Les conditions aux limites de surface libre d’efforts exprimées sur les surfaces latérales
parallèles à Ox donnent :
0yy zz
(56)
d’où en reportant dans l’expression de xx
:
xx
yE
l (57)
et donc finalement :
x x
yE e e
l (58)
Un tel champ de contrainte vérifiant par ailleurs l’équation d’équilibre (sans forces de volume)
est bien statiquement admissible pour le problème. Nous venons donc de mettre en évidence les
champs de déplacement et de contrainte solutions du problème :
2 2 2, ( ) , 2
x x
x y z
yE e e
l
xyx z y y
l l l
(59)
◊ Calcul de la résultante des efforts s’exerçant sur la section x=l.
Celle-ci est définie par :
24
( )
( )d dx
S x l
R T e y z
(60)
soit :
/2
( ) ( ) /2
0
. d d d d d d 0b h
x x x
S x l S x l b h
yR e y z E e y z E e z y y
l l
(61)
Cette résultante est donc nulle.
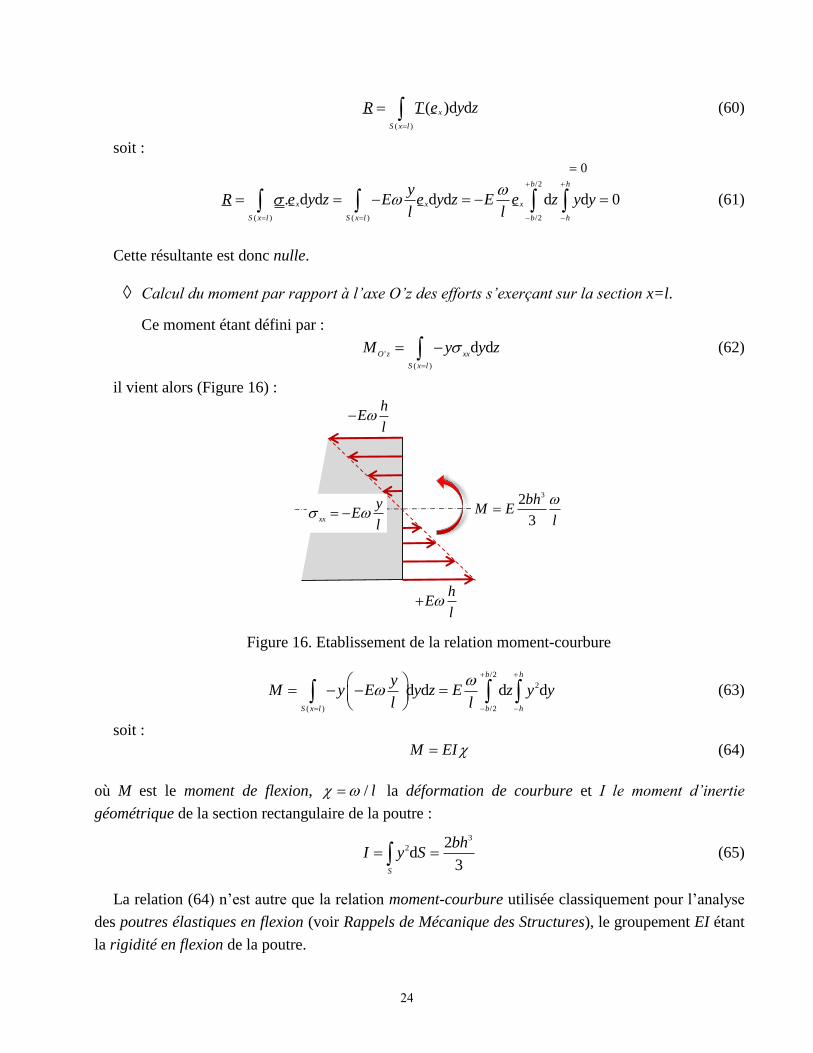
◊ Calcul du moment par rapport à l’axe O’z des efforts s’exerçant sur la section x=l.
Ce moment étant défini par :
'
( )
d dO z xx
S x l
M y y z
(62)
il vient alors (Figure 16) :
hE
l
hE
l
xx
yE
l
32
3
bhM E
l
Figure 16. Etablissement de la relation moment-courbure
/2
2
( ) /2
d d d db h
S x l b h
yM y E y z E z y y
l l
(63)
soit :
M EI (64)
où M est le moment de flexion, / l la déformation de courbure et I le moment d’inertie
géométrique de la section rectangulaire de la poutre :
3
2 2d
3S
bhI y S (65)
La relation (64) n’est autre que la relation moment-courbure utilisée classiquement pour l’analyse
des poutres élastiques en flexion (voir Rappels de Mécanique des Structures), le groupement EI étant
la rigidité en flexion de la poutre.
25
◊ Etude de la déformée
Cette étude est fondée sur l’analyse du champ de déplacement solution :
2 2 2, ( ) , 2
x y z
xyx z y yz
l l l
(66)
Cas où =0.
Les expressions (66) se simplifient alors en :
0 0 2 0, , 02
x y z
xyx
l l
(67)
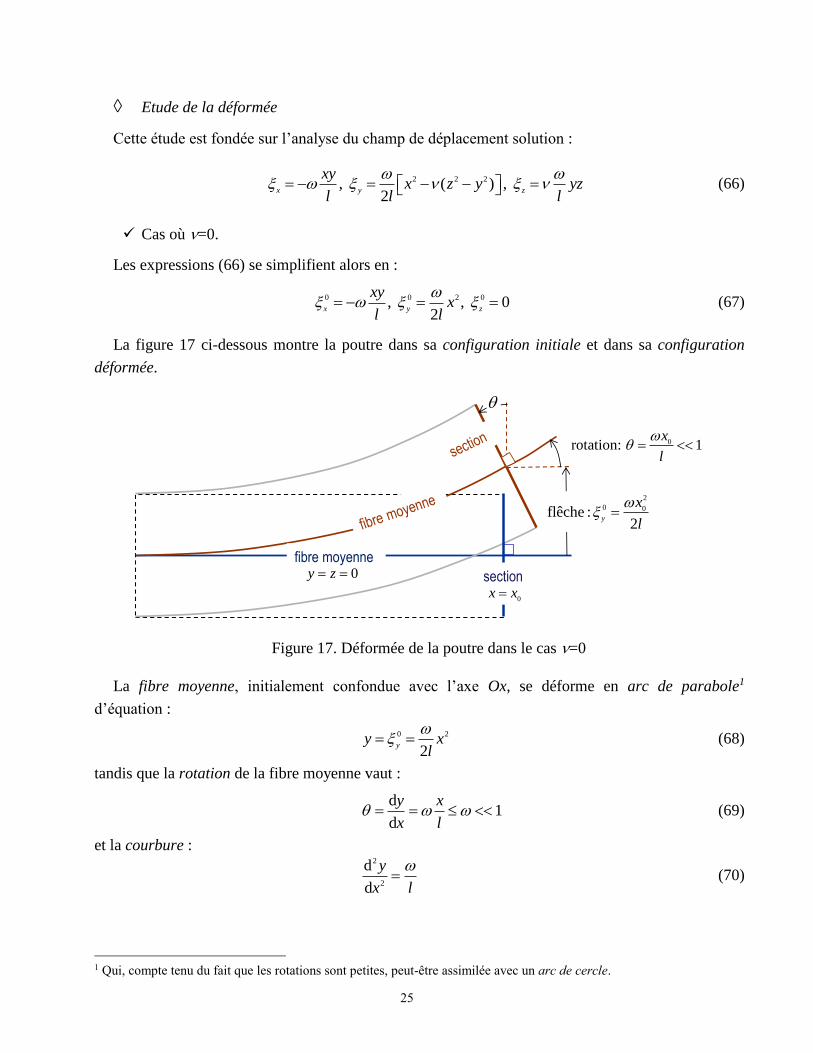
La figure 17 ci-dessous montre la poutre dans sa configuration initiale et dans sa configuration
déformée.
2
0 0flêche :2
y
x
l
0rotation: 1x
l
fibre moyenne
section
0x x
0y z
Figure 17. Déformée de la poutre dans le cas =0
La fibre moyenne, initialement confondue avec l’axe Ox, se déforme en arc de parabole1
d’équation :
0 2
2y
y xl
(68)
tandis que la rotation de la fibre moyenne vaut :
d1
d
y x
x l (69)
et la courbure : 2
2
d
d
y
x l
(70)
1 Qui, compte tenu du fait que les rotations sont petites, peut-être assimilée avec un arc de cercle.
26
qui est donc égale à la déformation de courbure, puisque la courbure initiale de la fibre moyenne est
nulle.
Une section de la poutre d’abscisse x0 subit entre sa position initiale et sa position actuelle un
mouvement rigidifiant caractérisé par :
‐ une translation égale à la flèche (68) en ce point ;
‐ et une rotation infinitésimale d’angle autour de l’axe z passant par le centre de la section
correspondant au champ de déplacement horizontal :
0
0/
xx l y
(71)
Cette section subit la même rotation que la fibre moyenne et reste donc perpendiculaire à la fibre
moyenne avant et après déformation (Figure 17).
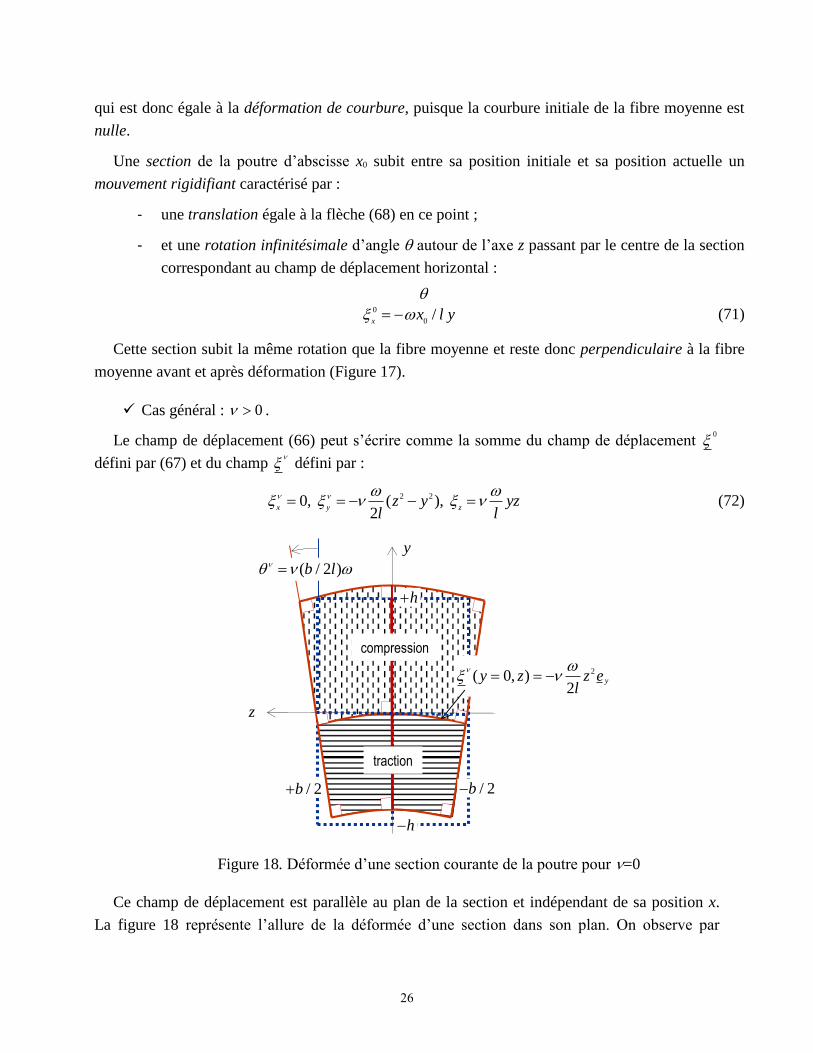
Cas général : 0 .
Le champ de déplacement (66) peut s’écrire comme la somme du champ de déplacement 0
défini par (67) et du champ
défini par :
2 20, ( ), 2
x y zz y yz
l l
(72)
y
z
h
/ 2b / 2b
h
2( 0, )2
yy z z el
( / 2 )b l
compression
traction
Figure 18. Déformée d’une section courante de la poutre pour =0
Ce champ de déplacement est parallèle au plan de la section et indépendant de sa position x.
La figure 18 représente l’allure de la déformée d’une section dans son plan. On observe par

27
exemple que le segment y=0 (ainsi que tous les segments horizontaux y=y0) se déforme en un arc
de parabole dont la courbure est égale à :
l
(73)
tandis que les segments verticaux z=z0 subissant une rotation infinitésimale égale à :
l
(74)
restent perpendiculaires aux déformées paraboliques des segments horizontaux.
* *
*

28
29
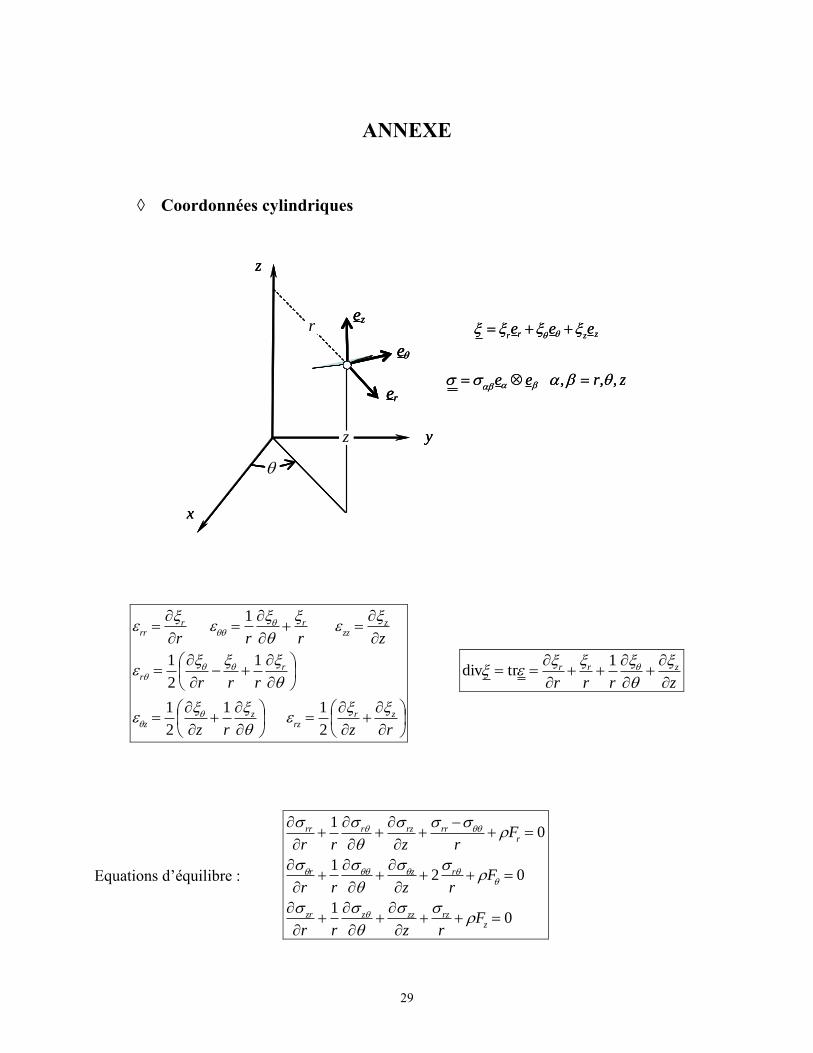
ANNEXE
Coordonnées cylindriques
x
y
z
r
z
re
e
zezzrr
eee
zr,ee ,,
x
y
z
r
z
re
e
ze
x
y
z
r
z
re
e
zezzrr
eee
zr,ee ,,
rzrz
rrr
zrrr
zrrz
zz
rr
zzz
rrrr
2
1
1
2
1
1
2
1
1
zrrr
zrr
1trdiv
Equations d’équilibre :
01
021
01
zrzzzzzr
rzr
rrrrzrrr
Frzrr
Frzrr
Frzrr

30
Coordonnées sphériques
x
y
z
re
e
e
eeerr
,, r,ee
x
y
z
re
e
e
eeerr
,, r,ee
rrrξ
r
ξ
rr
rrr
rrrrrr
rr
rr
rrrrr
sin
1
2
1
cot1
sin
1
2
1
1
2
1
cotsin
1
1
rrrrr
rr
cot
sin
112trdiv
Equations d’équilibre :
0)cot23(1
sin
11
0)3cot)((1
sin
11
0)cot2(1
sin
11
Frrrr
Frrrr
Frrrr
r
r
rr
rrrr
rrrr
31
MECANIQUE DES STRUCTURES

32
33
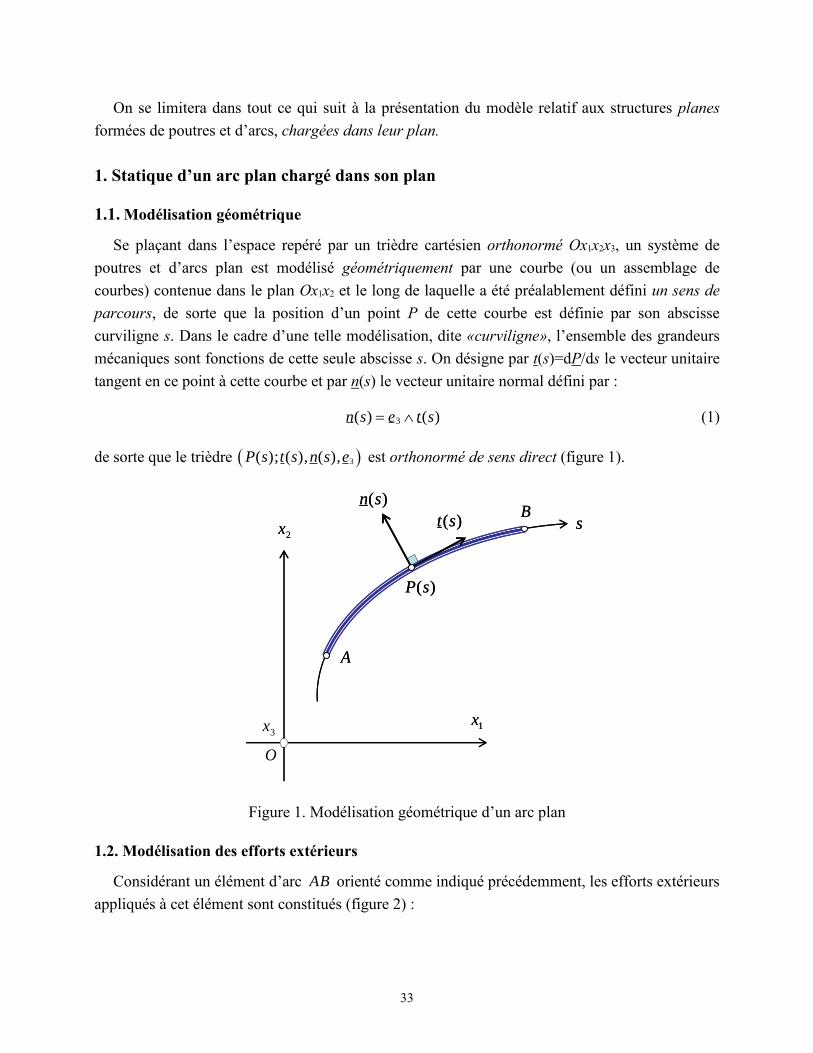
On se limitera dans tout ce qui suit à la présentation du modèle relatif aux structures planes
formées de poutres et d’arcs, chargées dans leur plan.
1. Statique d’un arc plan chargé dans son plan
1.1. Modélisation géométrique
Se plaçant dans l’espace repéré par un trièdre cartésien orthonormé Ox1x2x3, un système de
poutres et d’arcs plan est modélisé géométriquement par une courbe (ou un assemblage de
courbes) contenue dans le plan Ox1x2 et le long de laquelle a été préalablement défini un sens de
parcours, de sorte que la position d’un point P de cette courbe est définie par son abscisse
curviligne s. Dans le cadre d’une telle modélisation, dite «curviligne», l’ensemble des grandeurs
mécaniques sont fonctions de cette seule abscisse s. On désigne par t(s)=dP/ds le vecteur unitaire
tangent en ce point à cette courbe et par n(s) le vecteur unitaire normal défini par :
)()( 3 stesn (1)
de sorte que le trièdre 3( ); ( ), ( ),P s t s n s e est orthonormé de sens direct (figure 1).
1x
2x
3x
O
A
B
)(sP
)(st
)(sn
s
1x
2x
3x
O
A
B
)(sP
)(st
)(sn
s
Figure 1. Modélisation géométrique d’un arc plan
1.2. Modélisation des efforts extérieurs
Considérant un élément d’arc AB orienté comme indiqué précédemment, les efforts extérieurs
appliqués à cet élément sont constitués (figure 2) :
34
1x
2x
3x
O
A
B
s
)( sf
)( sm
iP
BR
AH
AR
BH
iF
iC
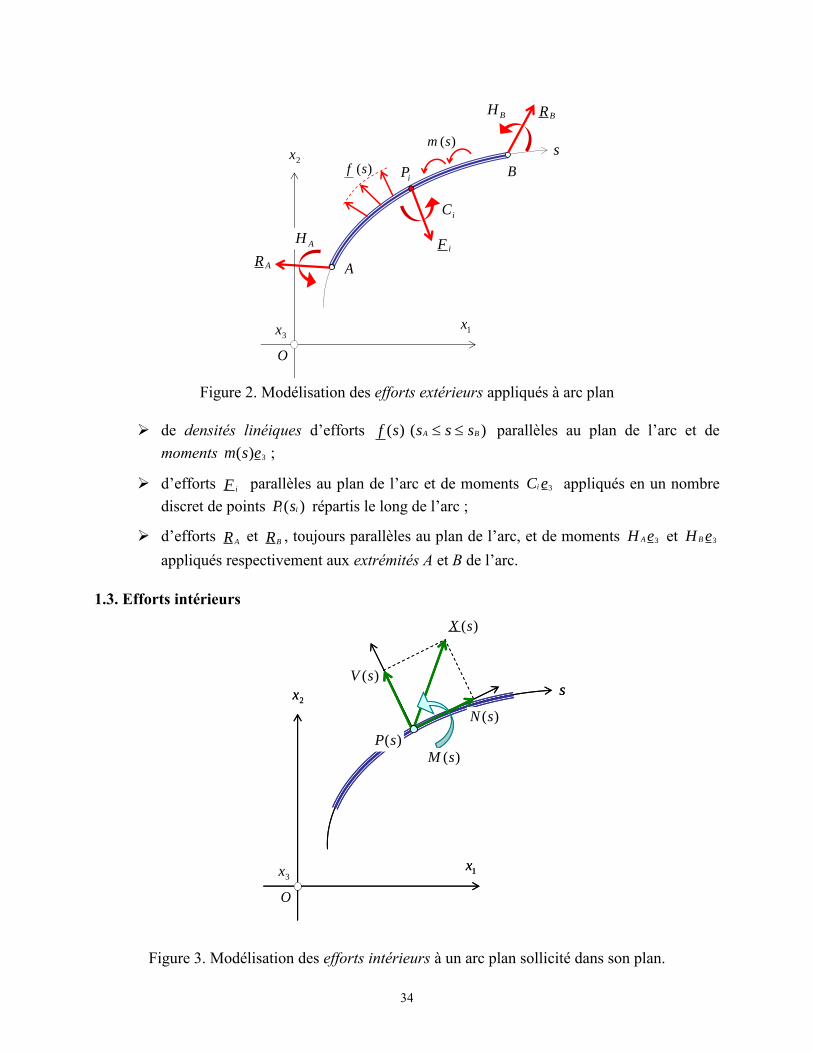
Figure 2. Modélisation des efforts extérieurs appliqués à arc plan
de densités linéiques d’efforts ( ) ( )A Bf s s s s parallèles au plan de l’arc et de
moments 3( )m s e ;
d’efforts iF parallèles au plan de l’arc et de moments 3iC e appliqués en un nombre
discret de points ( )i iP s répartis le long de l’arc ;
d’efforts AR et BR , toujours parallèles au plan de l’arc, et de moments 3AH e et 3BH e
appliqués respectivement aux extrémités A et B de l’arc.
1.3. Efforts intérieurs
1x
2x
3x
O
s
)(sP
)(sM
)(sN
)(sV
)(sX
1x
2x
3x
O
s
)(sP
)(sM
)(sN
)(sV
)(sX
Figure 3. Modélisation des efforts intérieurs à un arc plan sollicité dans son plan.
35
Les efforts intérieurs (ou contraintes généralisées) sont définis en tout point ( )P s par une
résultante que l’on peut décomposer dans le repère local sous la forme :
)()()()()( snsVstsNsX (2)
où N(s) et V(s) désignent respectivement l’effort normal (ou axial) et l’effort tranchant, ainsi que
par un moment M(s)e3 qui représente le moment de flexion en ce même point. Ces efforts
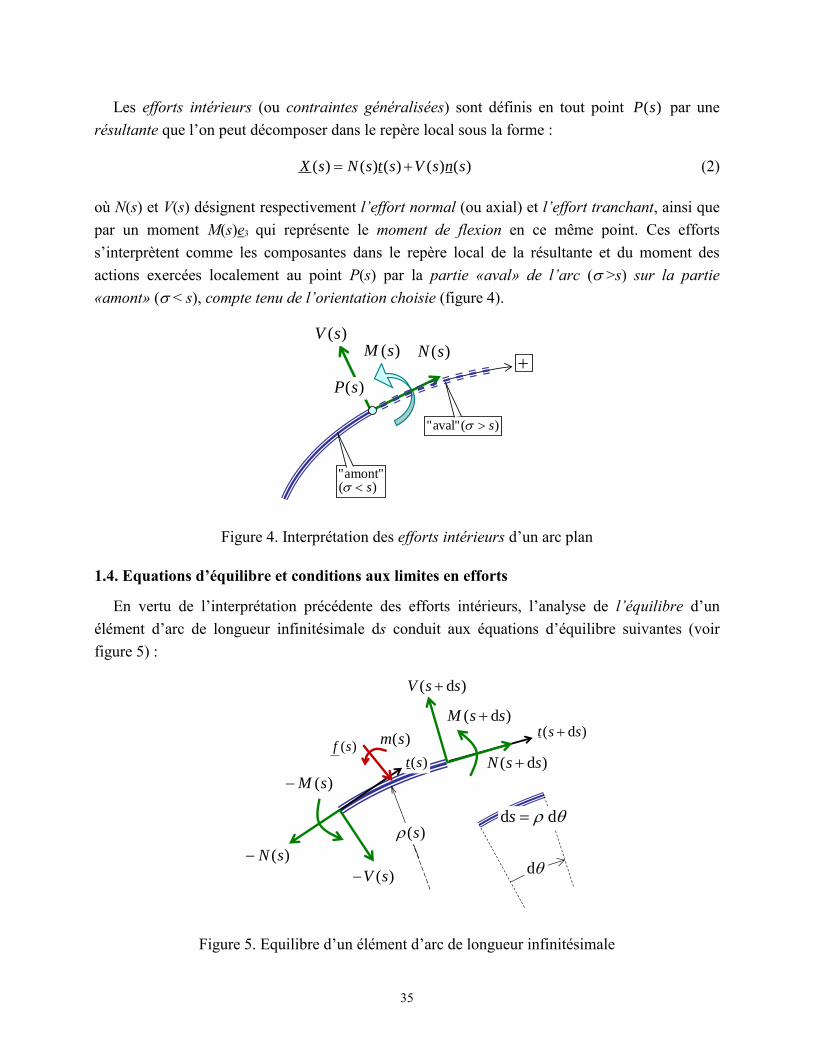
s’interprètent comme les composantes dans le repère local de la résultante et du moment des
actions exercées localement au point P(s) par la partie «aval» de l’arc (>s) sur la partie
«amont» (< s), compte tenu de l’orientation choisie (figure 4).
)("amont"
s
)(sP
)(sM )(sN)(sV
)("aval" s
Figure 4. Interprétation des efforts intérieurs d’un arc plan
1.4. Equations d’équilibre et conditions aux limites en efforts
En vertu de l’interprétation précédente des efforts intérieurs, l’analyse de l’équilibre d’un
élément d’arc de longueur infinitésimale ds conduit aux équations d’équilibre suivantes (voir
figure 5) :
)(st
)d( sst
)d( ssN
)d( ssV
)d( ssM
)(sM
)(sN
)(sV
)(sf)(sm
)(s d d s
d
Figure 5. Equilibre d’un élément d’arc de longueur infinitésimale

36
L’équilibre en résultante donne :
0)()(d
d sfsnVtN
s (3)
soit en tenant compte des relations suivantes :
t
s
nn
s
t
s
t
d
det
d
d
d
d
d
d (4)
où ds/d est le rayon de courbure de l’arc au point P(s), et en projetant sur le repère local (P,
t, n) :
) . ; .(
0d
d
0d
d
nfftff
fN
s
V
fV
s
N
nt
n
t
(5)
De même l’écriture de l’équilibre en moment de ce même élément d’arc
infinitésimal donne :
0)()()(d
d smsVsM
s (6)
Ces équations d’équilibre doivent être complétées par les conditions aux limites en efforts,
c’est-à-dire aux extrémités de l’arc AB :
)( ; ))((
)( ; ))((
BBBB
AAAA
ssMHssnVtNR
ssMHssnVtNR (7)
Remarque 1.
iFiC
)(
is
M
V
N
)(
is
M
V
N)( ii sP
Figure 6. Equations aux discontinuités en un point d’application d’efforts concentrés
Dans le cas où des efforts et un moments concentrés sont appliqués en un point Pi(si) de l’arc,
les équations différentielles d’équilibre (3) et (6) doivent être remplacées par les équations aux
discontinuités suivantes (figure 6) :
0)(
0)(
ii
ii
CsM
FsnVtN (8)
37
où ))(())(()( iii sss désigne le saut de la grandeur (.) au franchissement du point Pi en
suivant l’orientation de l’arc.
Remarque 2.
Dans le cas particulier où l’arc est une poutre droite, c’est-à-dire lorsque le rayon de courbure
tend vers l’infini, les équations d’équilibre (5) et (6) deviennent (en notant x=s l’abscisse d’un
point quelconque) :
0d
d
0d
d
0d
d
mVx
M
fx
V
fx
N
y
x
(9)
ou encore par combinaison des deux dernières équations, et en supposant que m=0 :
0d
d , 0
d
d2
2
yx fx
Mf
x
N (10)
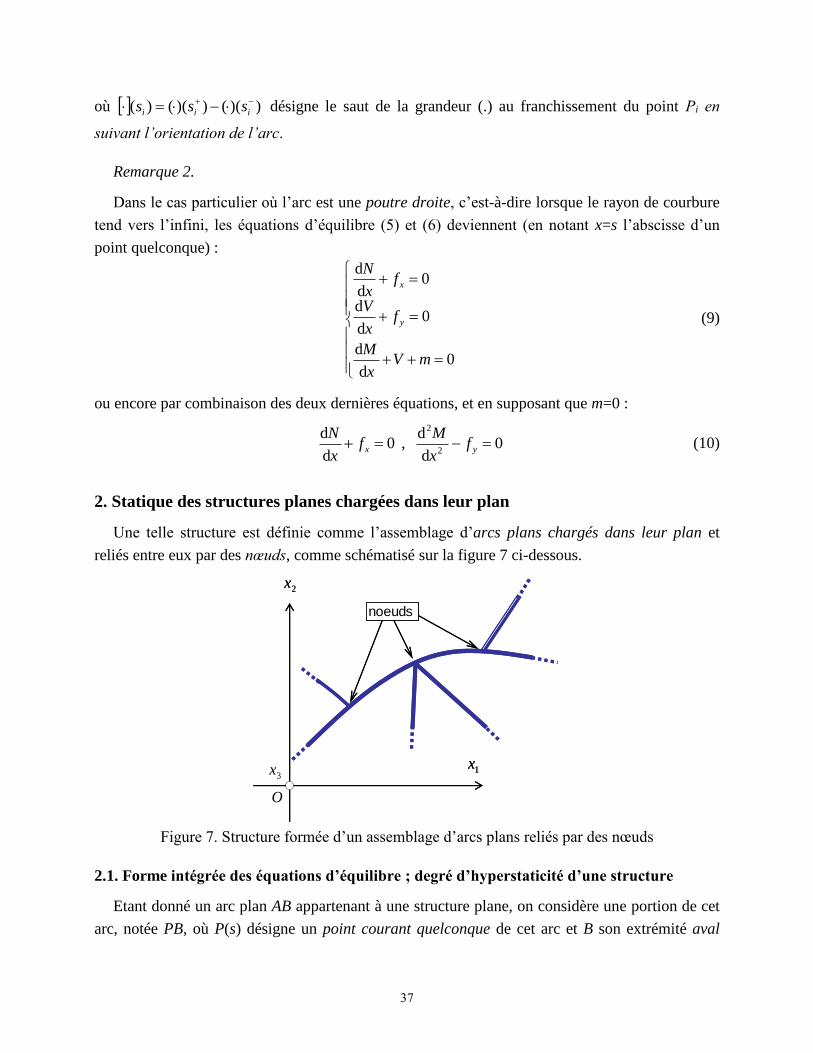
2. Statique des structures planes chargées dans leur plan
Une telle structure est définie comme l’assemblage d’arcs plans chargés dans leur plan et
reliés entre eux par des nœuds, comme schématisé sur la figure 7 ci-dessous.
1x
2x
3x
O
noeuds
1x
2x
3x
O
noeuds
Figure 7. Structure formée d’un assemblage d’arcs plans reliés par des nœuds
2.1. Forme intégrée des équations d’équilibre ; degré d’hyperstaticité d’une structure
Etant donné un arc plan AB appartenant à une structure plane, on considère une portion de cet
arc, notée PB, où P(s) désigne un point courant quelconque de cet arc et B son extrémité aval

38
(figure 8). Les efforts appliqués à la partie «aval» PB de l’arc (s), ainsi définie, sont de deux
types :
A
Bs
)( f)( m
BRBH
iF
iC
)(sP
)(sV
)(sN
)(sM
Figure 8. Equilibre global d’un sous ensemble PB de l’arc AB
la part des efforts extérieurs à l’arc AB appliquée au sous ensemble PB, ces derniers
pouvant être soit extérieurs à la structure tout entière, soit correspondre à l’action sur
l’arc PB des autres éléments de la structure ;
les efforts exercés au point P par la partie «amont» AP de l’arc (s) lesquels, compte
tenu de l’interprétation donnée à la figure 4, ne sont autres que les opposés des efforts
axial et tranchant, et du moment fléchissant en ce point.
L’écriture de l’équilibre en résultante et en moment (par rapport au point P) du tronçon «aval»
PB, conduit alors immédiatement à la détermination des efforts intérieurs grâce aux relations
suivantes :
Résultante :
B
ss
i
s
s
RFfsnsVstsNi
B
d)()()()()( (11)
Moment :
BB
ss ss
iii
s
s
s
s
HeRPBCeFPsP
mefPsPsM
i i
BB
33
3
).().)((
d)(d)].()()([)( (12)
Ces équations constituent la forme intégrée, plus facile à manipuler en pratique, des
équations différentielles d’équilibre (5) et (6). Elles permettent de calculer directement les efforts
intérieurs en un point quelconque en fonction des efforts appliqués sur la partie de l’arc située en
aval de ce point. Dans le cas où la structure est non chargée, c’est-à-dire où les données relatives
39
aux efforts extérieurs sont nulles, les distributions correspondantes d’efforts intérieurs à la
structure, sont dites «auto-équilibrées» (on parle aussi de champs d’autocontrainte).
Le degré d’hyperstaticité de la structure, noté k, est le nombre de variables
indépendantes de type effort (appelées inconnues hyperstatiques), dont dépend
l’ensemble des distributions d’efforts intérieurs auto-équilibrés1. La structure est dite
«hyperstatique» si k est strictement positif, «isostatique» si k=0. Dans ce dernier cas, les
seules équations d’équilibre suffisent à déterminer complètement les distributions
d’efforts intérieurs.
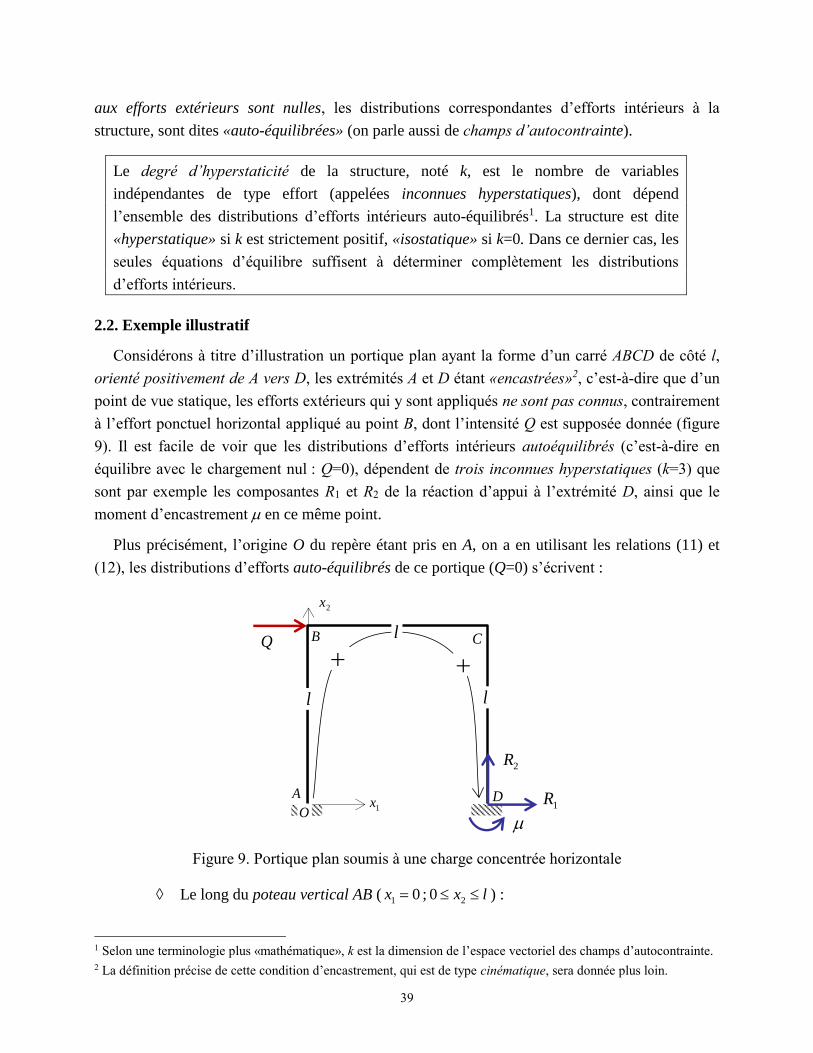
2.2. Exemple illustratif
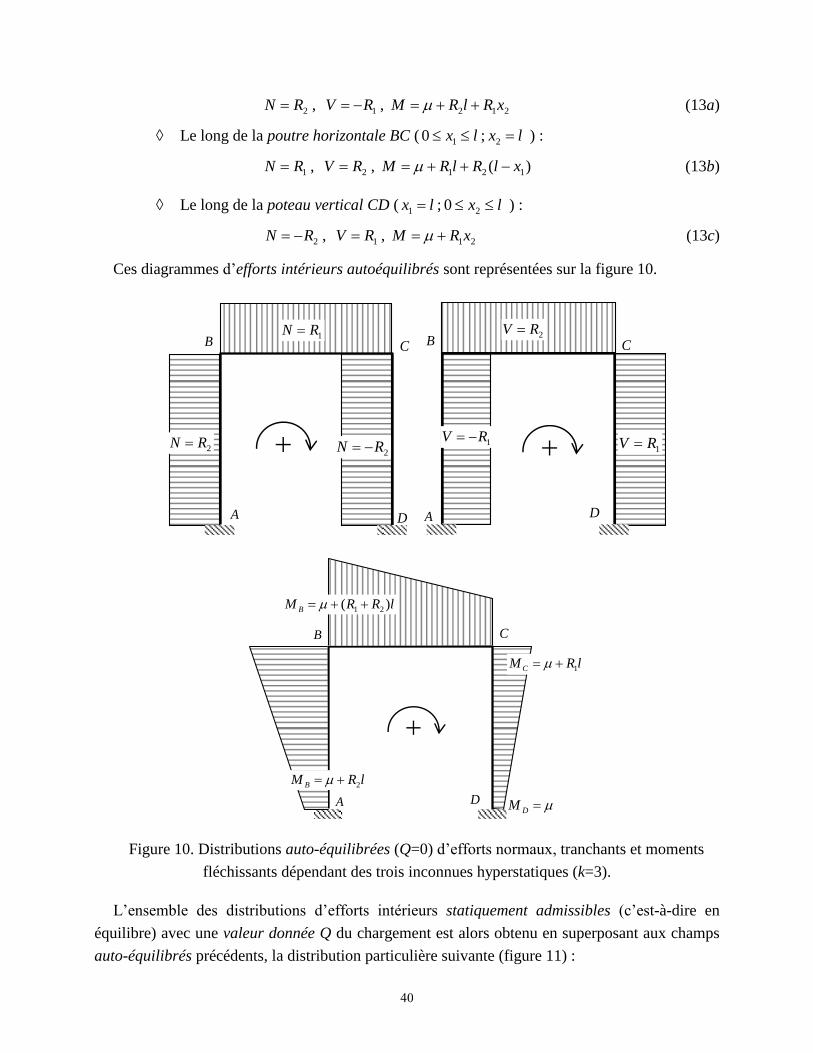
Considérons à titre d’illustration un portique plan ayant la forme d’un carré ABCD de côté l,
orienté positivement de A vers D, les extrémités A et D étant «encastrées»2, c’est-à-dire que d’un
point de vue statique, les efforts extérieurs qui y sont appliqués ne sont pas connus, contrairement
à l’effort ponctuel horizontal appliqué au point B, dont l’intensité Q est supposée donnée (figure
9). Il est facile de voir que les distributions d’efforts intérieurs autoéquilibrés (c’est-à-dire en
équilibre avec le chargement nul : Q=0), dépendent de trois inconnues hyperstatiques (k=3) que
sont par exemple les composantes R1 et R2 de la réaction d’appui à l’extrémité D, ainsi que le
moment d’encastrement en ce même point.
Plus précisément, l’origine O du repère étant pris en A, on a en utilisant les relations (11) et
(12), les distributions d’efforts auto-équilibrés de ce portique (Q=0) s’écrivent :
A
B C
D
l
l
Q
O 1x
2x
1R
2R
l
Figure 9. Portique plan soumis à une charge concentrée horizontale
Le long du poteau vertical AB ( lxx 21 0 ; 0 ) :
1 Selon une terminologie plus «mathématique», k est la dimension de l’espace vectoriel des champs d’autocontrainte. 2 La définition précise de cette condition d’encastrement, qui est de type cinématique, sera donnée plus loin.
40
21212 , , xRlRMRVRN (13a)
Le long de la poutre horizontale BC ( ; 0 21 lxlx ) :
)( , , 12121 xlRlRMRVRN (13b)
Le long de la poteau vertical CD ( 0 ; 21 lxlx ) :
2112 , , xRMRVRN (13c)
Ces diagrammes d’efforts intérieurs autoéquilibrés sont représentées sur la figure 10.
A
B C
D
2RN 2RN
1RN
A
B C
D
1RV 1RV
2RV
A
B C
D DM
lRM C 1
lRRM B )( 21
lRM B 2
Figure 10. Distributions auto-équilibrées (Q=0) d’efforts normaux, tranchants et moments
fléchissants dépendant des trois inconnues hyperstatiques (k=3).
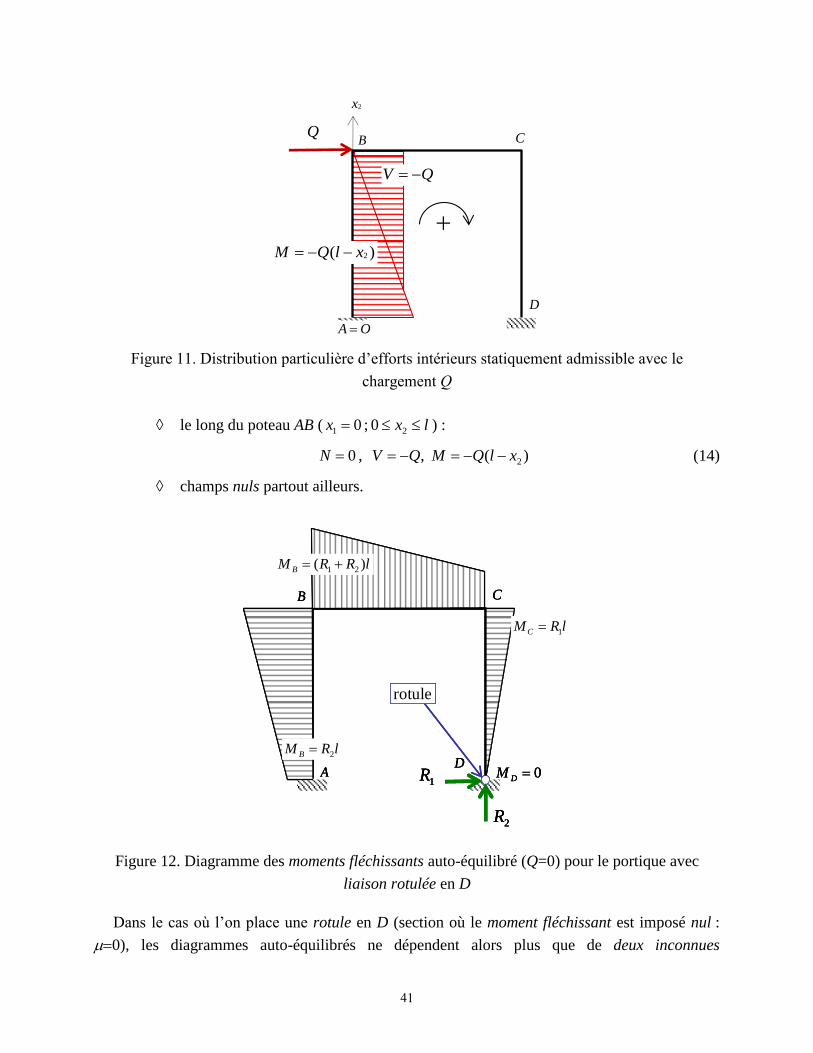
L’ensemble des distributions d’efforts intérieurs statiquement admissibles (c’est-à-dire en
équilibre) avec une valeur donnée Q du chargement est alors obtenu en superposant aux champs
auto-équilibrés précédents, la distribution particulière suivante (figure 11) :
41
B C
D
A O
2x
Q
2( )M Q l x
V Q
Figure 11. Distribution particulière d’efforts intérieurs statiquement admissible avec le
chargement Q
le long du poteau AB ( lxx 21 0 ; 0 ) :
)( , , 0 2xlQMQVN (14)
champs nuls partout ailleurs.
A
B C
D0DM
lRMC 1
lRRM B )( 21
lRM B 2
rotule
2R
1RA
B C
D0DM
lRMC 1
lRRM B )( 21
lRM B 2
rotule
2R
1RA
B C
D0DM
lRMC 1
lRRM B )( 21
lRM B 2
rotule
2R
1R
Figure 12. Diagramme des moments fléchissants auto-équilibré (Q=0) pour le portique avec
liaison rotulée en D
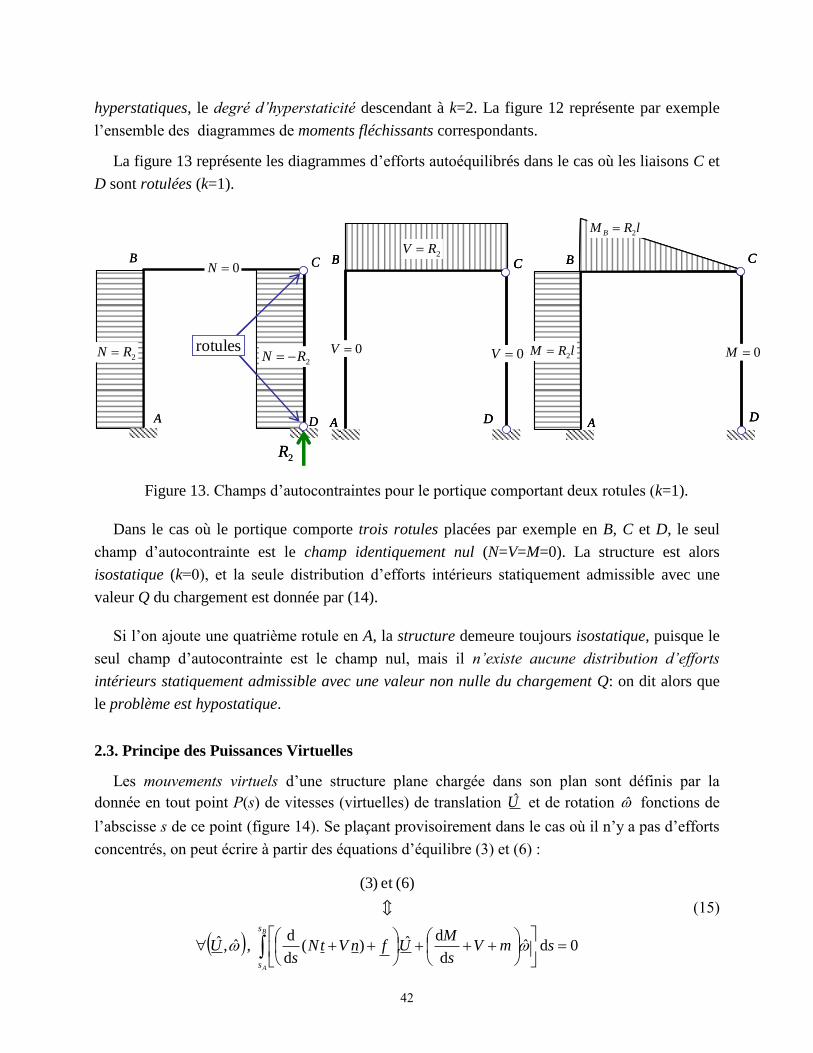
Dans le cas où l’on place une rotule en D (section où le moment fléchissant est imposé nul :
0), les diagrammes auto-équilibrés ne dépendent alors plus que de deux inconnues
42
hyperstatiques, le degré d’hyperstaticité descendant à k=2. La figure 12 représente par exemple
l’ensemble des diagrammes de moments fléchissants correspondants.
La figure 13 représente les diagrammes d’efforts autoéquilibrés dans le cas où les liaisons C et
D sont rotulées (k=1).
A
B C
D
0V0V
2RV
A
B C
D
0M
lRM B 2
lRM 2
A
B C
D
2RN 2RN
0N
2R
rotules
A
B C
D
0V0V
2RV
A
B C
D
0V0V
2RV
A
B C
D
0M
lRM B 2
lRM 2
A
B C
D
0M
lRM B 2
lRM 2
A
B C
D
2RN 2RN
0N
2R
rotules
Figure 13. Champs d’autocontraintes pour le portique comportant deux rotules (k=1).
Dans le cas où le portique comporte trois rotules placées par exemple en B, C et D, le seul
champ d’autocontrainte est le champ identiquement nul (N=V=M=0). La structure est alors
isostatique (k=0), et la seule distribution d’efforts intérieurs statiquement admissible avec une
valeur Q du chargement est donnée par (14).
Si l’on ajoute une quatrième rotule en A, la structure demeure toujours isostatique, puisque le
seul champ d’autocontrainte est le champ nul, mais il n’existe aucune distribution d’efforts
intérieurs statiquement admissible avec une valeur non nulle du chargement Q: on dit alors que
le problème est hypostatique.
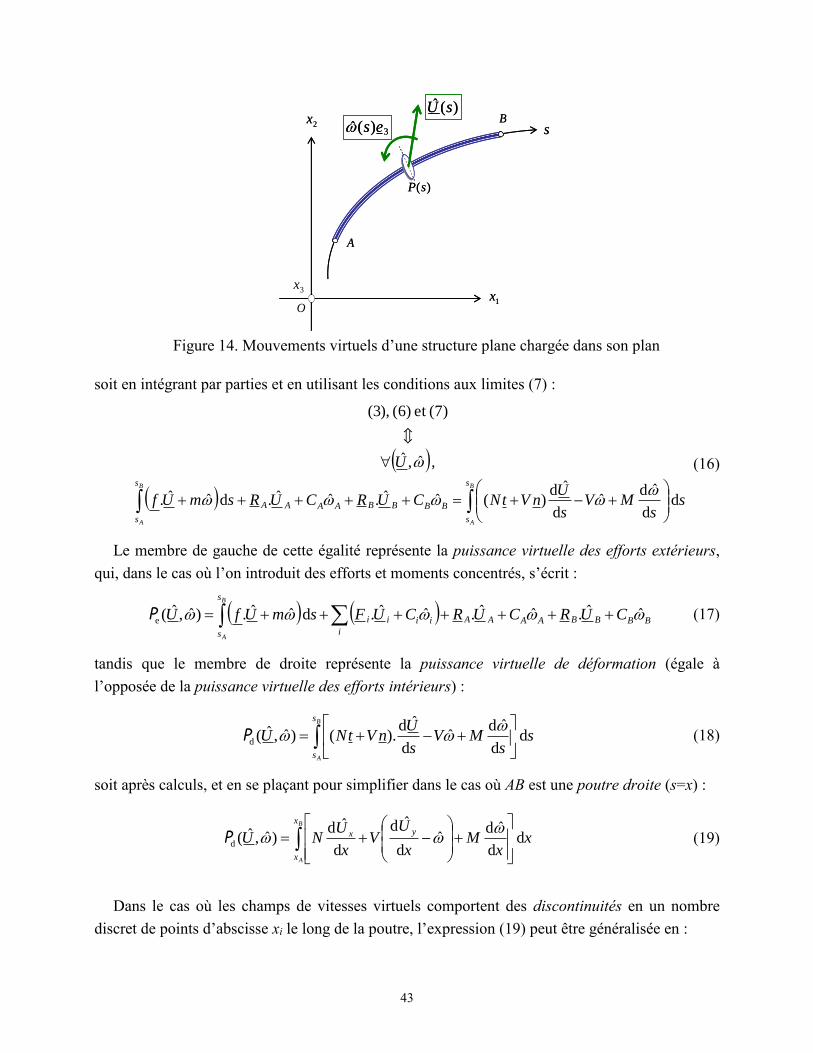
2.3. Principe des Puissances Virtuelles
Les mouvements virtuels d’une structure plane chargée dans son plan sont définis par la
donnée en tout point P(s) de vitesses (virtuelles) de translation U et de rotation fonctions de
l’abscisse s de ce point (figure 14). Se plaçant provisoirement dans le cas où il n’y a pas d’efforts
concentrés, on peut écrire à partir des équations d’équilibre (3) et (6) :
0d ˆd
dˆ.)(d
d , ˆ,ˆ
)6(et )3(
smV
s
MUfnVtN
sU
B
A
s
s
(15)
43
1x
2x
3x
O
A
B
)(sP
s
)(ˆ sU
3)(ˆ es
1x
2x
3x
O
A
B
)(sP
s
)(ˆ sU
3)(ˆ es
Figure 14. Mouvements virtuels d’une structure plane chargée dans son plan
soit en intégrant par parties et en utilisant les conditions aux limites (7) :
ss
MVs
UnVtNCURCURsmUf
U
B
A
B
A
s
s
BBBBAAAA
s
s
d d
ˆdˆ
d
ˆd)(ˆˆ.ˆˆ. d ˆˆ.
, ˆ,ˆ
)7(et )6( ,)3(
(16)
Le membre de gauche de cette égalité représente la puissance virtuelle des efforts extérieurs,
qui, dans le cas où l’on introduit des efforts et moments concentrés, s’écrit :
BBBBAAAA
i
iiii
s
s
CURCURCUFsmUfUB
A
ˆˆ.ˆˆ.ˆˆ.d ˆˆ.)ˆ,ˆ(e P (17)
tandis que le membre de droite représente la puissance virtuelle de déformation (égale à
l’opposée de la puissance virtuelle des efforts intérieurs) :
ss
MVs
UnVtNU
B
A
s
s
d d
ˆdˆ
d
ˆd).()ˆ,ˆ(d
P (18)
soit après calculs, et en se plaçant pour simplifier dans le cas où AB est une poutre droite (s=x) :
xx
Mx
UV
x
UNU
B
A
x
x
yx d d
ˆdˆ
d
ˆd
d
ˆd)ˆ,ˆ(d
P (19)
Dans le cas où les champs de vitesses virtuels comportent des discontinuités en un nombre
discret de points d’abscisse xi le long de la poutre, l’expression (19) peut être généralisée en :
44
d
ˆ ˆd d d ˆˆ( , ) dˆ ˆd d d
ˆ ˆ ( ) ( ) ( ) ( ) ( ) ( )ˆ
B
A
xx y
x
i x i i y i i i
i
U UU N V M x
x x x
N x U x V x U x M x x
P (19bis)
où ( ) ( )( ) ( )( )i i ix x x représente la discontinuité de ( ) à la traversée de la section
d’abscisse ix dans le sens des x positifs. L’introduction de ces discontinuités sera indispensable
pour traiter les problèmes de Calcul à la Rupture de systèmes de poutres.
Tout comme pour les systèmes en milieu continu 3D (voir pages 17-18 du présent document),
le Principe des Puissances Virtuelles (16) constitue l’expression dualisée des équations
d’équilibre1. Il n’a, à ce stade, aucun rapport avec un quelconque « principe thermodynamique ou
énergétique ».
3. Analyse élastique linéaire des structures planes de poutres droites
3.1. Déformations d’une poutre droite
x
y
z
)(x )d( xx
)(xP )d( xxP
d / dv x
1
1
)(xu
flèche
)( xv
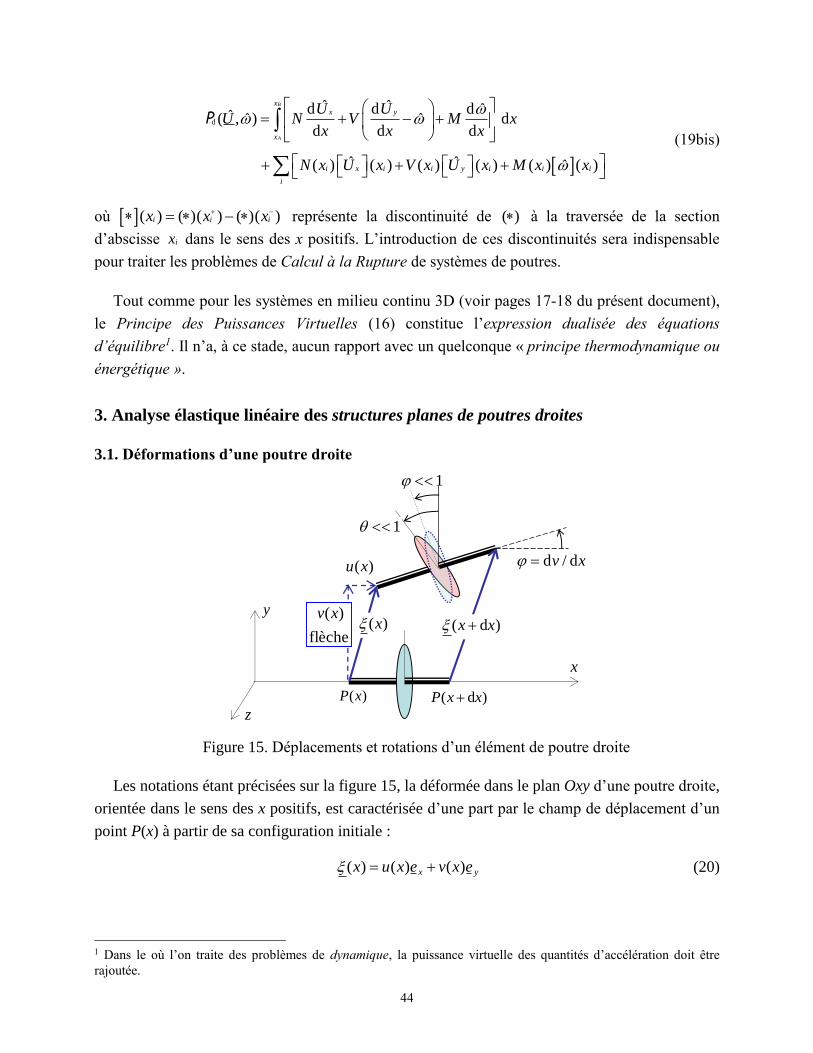
Figure 15. Déplacements et rotations d’un élément de poutre droite
Les notations étant précisées sur la figure 15, la déformée dans le plan Oxy d’une poutre droite,
orientée dans le sens des x positifs, est caractérisée d’une part par le champ de déplacement d’un
point P(x) à partir de sa configuration initiale :
yx exvexux )()()( (20)
1 Dans le où l’on traite des problèmes de dynamique, la puissance virtuelle des quantités d’accélération doit être
rajoutée.

45
où v(x) est la flèche au point x et u(x) le déplacement axial, d’autre part par la rotation (x)de la
section de la poutre en ce même point. La transformation de la poutre ainsi définie sera dite
infinitésimale si les deux conditions suivantes sont vérifiées en tout point :
1et 1d/d x (21)
La première condition implique en particulier que la rotation de la «fibre moyenne» de la
poutre définie par :
x
v
d
d (22)
reste, tout comme la rotation propre de la section, petite (figure 15). Par comparaison avec (19),
l’expression de la densité linéique de la puissance (réelle) de déformation de la poutre s’écrit
alors :
xMxvV
x
uNp
d
d)d/d(
d
d),,(d (23)
où - , et représentent les taux de déformation d’extension, de cisaillement et de courbure,
qui apparaissent en dualité respective de l’effort normal, de l’effort tranchant et du moment
fléchissant dans l’expression de cette densité de puissance.
3.2. Loi de comportement élastique linéaire
Le comportement élastique linéaire d’une poutre s’exprime en tout point par des relations
linéaires entre les efforts intérieurs (N, V, M) et les déformations généralisées (, ). La
formulation de cette loi de comportement repose généralement sur la condition de Navier-
Bernoulli, qui stipule que la déformation de cisaillement reste nulle ( ), ou en d’autres
termes que la rotation de la section de la poutre est identique à celle de la fibre moyenne :
x
v
d
d
de sorte que la déformation de courbure de la poutre s’écrit alors :
''d
d2
2
vx
v (25)
Dans le cas où la poutre est constituée d’un matériau élastique linéaire isotrope homogène,
caractérisé notamment par son module d’Young E, la loi de comportement, exprimée à partir
d’un état initial naturel1, s’écrit classiquement :
EI
Mχ
ES
N ; (26)
1 …et en condition isotherme.
46
où S désigne la section de la poutre et I son inertie géométrique calculée par rapport à l’axe
d’inertie principal parallèle à Oz1.
3.3. Calcul élastique : cas des structures isostatiques
En raison du caractère isostatique de la structure et du problème associé, les efforts intérieurs
peuvent être déterminés en fonction du chargement à partir des seules équations d’équilibre, la loi
de comportement élastique permettant ensuite le calcul des déformations, puis par intégration, des
déplacements.
OA
Q
l )(xu
)(xv
x
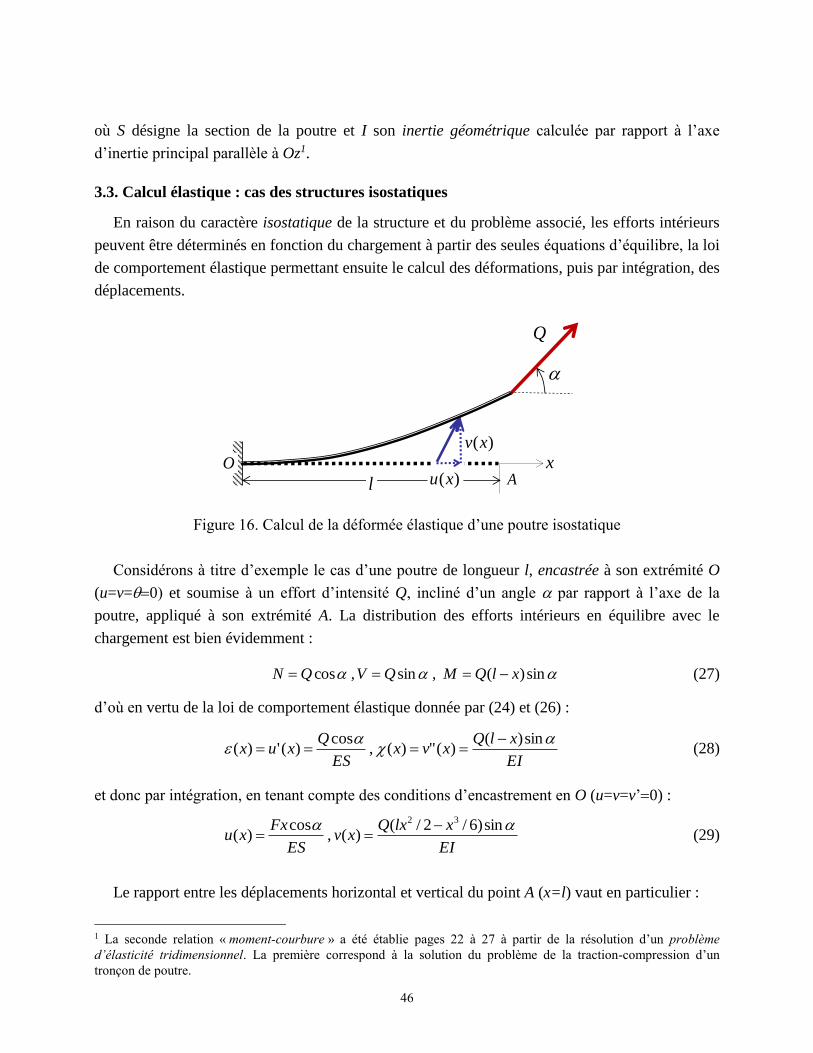
Figure 16. Calcul de la déformée élastique d’une poutre isostatique
Considérons à titre d’exemple le cas d’une poutre de longueur l, encastrée à son extrémité O
(u=v=0 et soumise à un effort d’intensité Q, incliné d’un angle par rapport à l’axe de la
poutre, appliqué à son extrémité A. La distribution des efforts intérieurs en équilibre avec le
chargement est bien évidemment :
sin)( , sin , cos xlQMQVQN (27)
d’où en vertu de la loi de comportement élastique donnée par (24) et (26) :
EI
xlQxvx
ES
Qxux
sin)()(")( ,
cos)(')(
(28)
et donc par intégration, en tenant compte des conditions d’encastrement en O (u=v=v’0) :
EI
xlxQxv
ES
Fxxu
sin)6/2/()( ,
cos)(
32 (29)
Le rapport entre les déplacements horizontal et vertical du point A (x=l) vaut en particulier :
1 La seconde relation « moment-courbure » a été établie pages 22 à 27 à partir de la résolution d’un problème
d’élasticité tridimensionnel. La première correspond à la solution du problème de la traction-compression d’un
tronçon de poutre.
47
tan
3
)(
)(2Sl
I
lv
lu (30)
soit dans le cas par exemple d’une poutre de section rectangulaire (hauteur h et largeur b) :
2
3 ( ) 1 , /12
( ) 4 tan
u l hS bh I bh
v l l
(31)
Il apparaît ainsi que, hormis dans de cas où qui correspond à l’application d’un
chargement « quasi horizontal », le rapport entre le déplacement horizontal et la flèche verticale à
l’extrémité de la poutre est proportionnel au carré de l’élancement h/l1, c’est-à-dire une quantité
très petite devant l’unité. On peut donc, en première approximation et sauf bien évidemment dans
le cas des structures réticulées où l’effort tranchant et le moment fléchissant sont nuls, négliger
l’effet des déformations d’extension dues à l’effort normal vis-à-vis de celui des déformations de
courbure dues à la flexion. On parle dans ce cas de structures à barres fléchies.
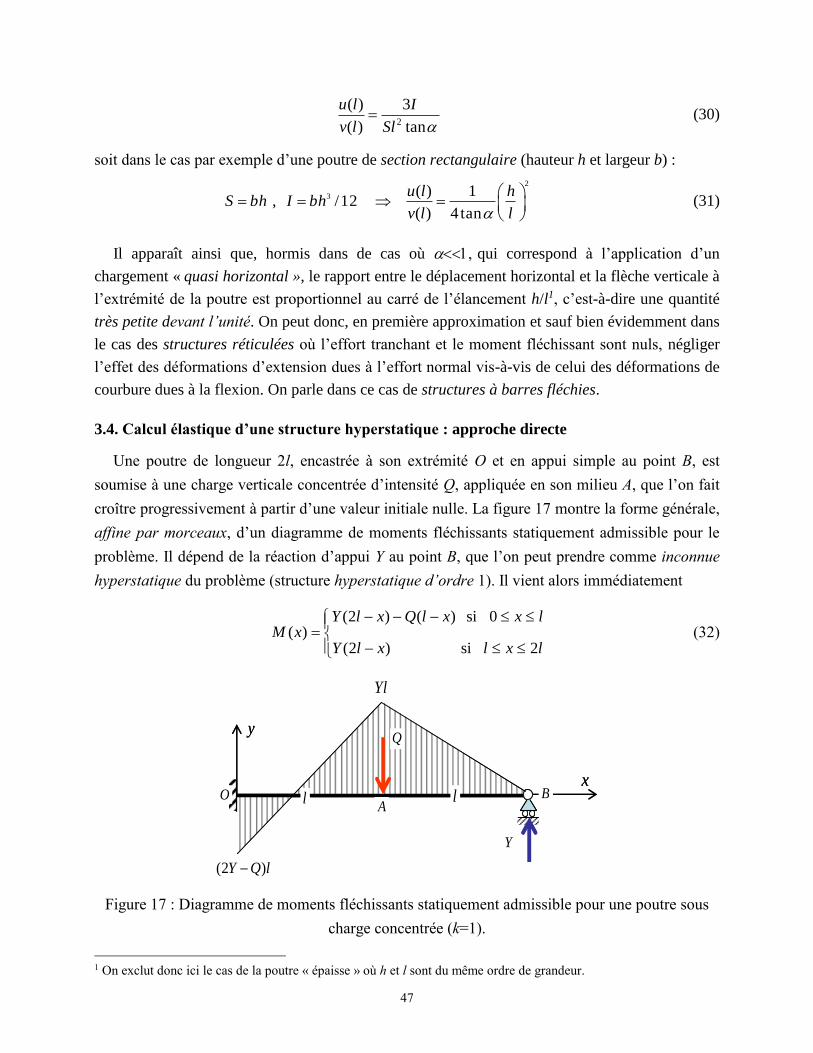
3.4. Calcul élastique d’une structure hyperstatique : approche directe
Une poutre de longueur 2l, encastrée à son extrémité O et en appui simple au point B, est
soumise à une charge verticale concentrée d’intensité Q, appliquée en son milieu A, que l’on fait
croître progressivement à partir d’une valeur initiale nulle. La figure 17 montre la forme générale,
affine par morceaux, d’un diagramme de moments fléchissants statiquement admissible pour le
problème. Il dépend de la réaction d’appui Y au point B, que l’on peut prendre comme inconnue
hyperstatique du problème (structure hyperstatique d’ordre 1). Il vient alors immédiatement
lx lxlY
lx xlQxlYxM
2 si )2(
0 si )()2()( (32)
OA
B
Q
Y
l l
Yl
lQY )2(
x
y
OA
B
Q
Y
l l
Yl
lQY )2(
x
y
Figure 17 : Diagramme de moments fléchissants statiquement admissible pour une poutre sous
charge concentrée (k=1).
1 On exclut donc ici le cas de la poutre « épaisse » où h et l sont du même ordre de grandeur.
48
de sorte qu’en vertu de la loi de comportement (26), écrite dans l’hypothèse d’un état initial
naturel de la structure, la déformation de courbure est :
EI
xMxv
)()(" (33)
La procédure de résolution directe de ce problème est classique1. Elle consiste à intégrer à
deux reprises l’équation (33) où l’on tient compte de (32), et à exprimer les différentes conditions
aux limites :
encastrement en O : 0)0(')0( xvxv (34)
appui simple en B : 0)2( lxv (35)
ainsi que la condition de continuité de la flèche et le la rotation au point A :
)(' )(' , )()( lxvlxvlxvlxv (36)
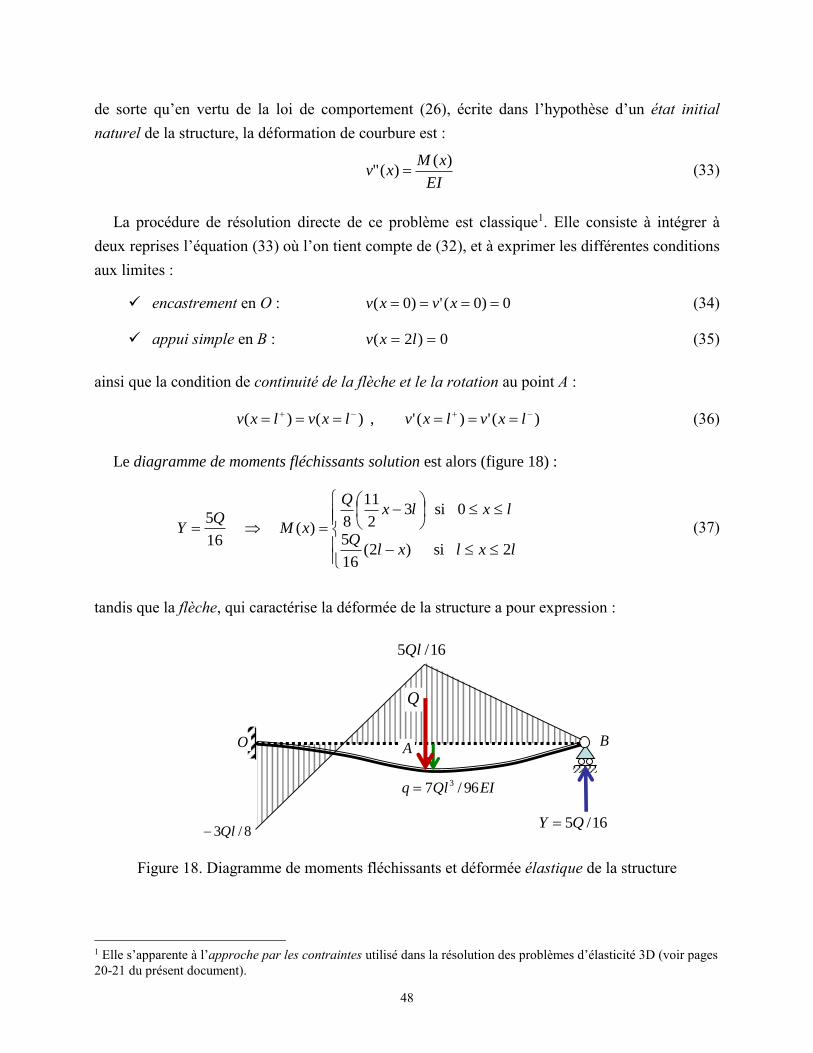
Le diagramme de moments fléchissants solution est alors (figure 18) :
lx lxlQ
lx lxQ
xMQ
Y
2 si )2(16
5
0 si 32
11
8)( 16
5 (37)
tandis que la flèche, qui caractérise la déformée de la structure a pour expression :
O AB
Q
16/5Ql
8/3Ql
EIQlq 96/7 3
16/5QY
Figure 18. Diagramme de moments fléchissants et déformée élastique de la structure
1 Elle s’apparente à l’approche par les contraintes utilisé dans la résolution des problèmes d’élasticité 3D (voir pages
20-21 du présent document).
49
lx lllxxxlEI
Qx
lx lx-EI
Qx
xv
2 si 8205296
0 si 181196)(
222
2
(38)
d’où en particulier le déplacement q du point d’application de la charge (compté positivement
dans le même sens que le chargement appliqué) :
EI
Qllxvq
96
7)(
3
(39)
4. Calcul élastique des structures à barres fléchies : l’approche énergétique
Considérant un système de barres en flexion, noté L, on se place ici pour simplifier1 dans la
situation où :
les données en déplacements sont nulles (appuis fixes, encastrements,…) ;
les données en efforts dépendent d’un seul paramètre de chargement noté Q ;
la structure est supposée une fois hyperstatique, et l’on désigne par Y l’inconnue
hyperstatique.
Les barres ont un comportement élastique en flexion :
))((
)()(
sEI
sMs (40)
Désignant alors par (Q’,Y’) un couple de valeurs quelconques du paramètre de chargement et
de l’inconnue hyperstatique, on introduit la fonction quadratique suivante 2:
YQ
sEI
YQMYQ '
','(
d 2
)','()','(
)
2
G
FL
(41)
où )','( YQM désigne la distribution de moments fléchissants en équilibre avec (Q’,Y’) et q le
déplacement élastique associé à l’application de l’effort Q. Désignant par (Q,Y) le couple solution
élastique du problème, nous pouvons écrire :
qQQsEI
YQMYQMYQYQ )'(d
2
),()','( ),()','(
22
L
FF (42)
1 L’approche énergétique, ici présentée dans un cas simplifié, s’applique bien évidemment à des situations bien plus
générales. 2 La fonction G représente l’énergie élastique de la structure associée à l’application des efforts extérieurs Q’ et Y’.

50
soit en tenant compte de l’inégalité :
),()','(),(
2
),()','( 22
YQMYQMEI
YQM
EI
YQMYQM
(43)
ainsi que de la loi de comportement (40) :
qQQsYQMYQMYQYQ )'(d ),()','( ),()','( L
FF (44)
Or /M EI étant cinématiquement admissible avec q (car solution du problème
d’élasticité), et la distribution de moments fléchissants ),()','( YQMYQM étant statiquement
admissible avec QQ ' , l’application du théorème des travaux virtuels1 conduit à la nullité du
second membre de l’inégalité (43).
D’où le principe de minimum :
)','(Min),( fixé, )','(
YQYQqQY
FF (45)
qui se traduit par :
, , 0 ( )' '
, 0 , ( )' '
Q Y Q Y aY Y
Q Y q Q Y bQ Y
F G
F G (45)
La fonction G n’est autre que l’énergie complémentaire, et l’équation (45(a)) le principe du
minimum en contrainte (ou théorème du potentiel minimum), tandis que la seconde équation
constitue le théorème de Castigliano.
Dans l’exemple de la poutre-console traité au début de cette section, l’ensemble des
distributions de moments fléchissants statiquement admissibles pour le problème est de la forme
(32), c’est-à-dire paramétré par l’inconnue hyperstatique Y. Le calcul de la fonctionnelle G donne
alors après calculs :
''5''86
)','( 223
QYQYEI
lYQ G (46)
d’où la valeur de l’inconnue hyperstatique obtenue par application du théorème du potentiel
minimum (45(a)) :
16
5 0,
QYYQ
Y
G (47)
1 Il s’agit de l’application du Principe des Puissances Virtuelles, énoncé à la section 2.3., aux structures à barres
fléchies dans lesquelles les vitesses sont remplacées par les déplacements.

51
ainsi que celle du déplacement du point d’application du chargement obtenue par application de
théorème de Castigliano :
EI
QlYQ
EI
lqYQ
YQq
96
7)52(
6 ,
'
33
G
. (48)
* *
*
![Réalisation d'un calcul de prédiction de rupture p[] · Code_Aster Version default Titre : Réalisation d'un calcul de prédiction de rupture p[...] Date : 27/04/2013 Page : 2/22](https://img.pdfslide.fr/doc/110x75/5b98de1709d3f253748d05d4/realisation-dun-calcul-de-prediction-de-rupture-p-codeaster-version-default.jpg)

















![Réalisation d'un calcul de prédiction de rupture p[] · La mécanique de la rupture élastique, basée sur les critères classiques de taux de restitution d'énergie, d'intégral](https://img.pdfslide.fr/doc/110x75/5b9d482609d3f275078c0a9c/realisation-dun-calcul-de-prediction-de-rupture-p-la-mecanique-de-la-rupture.jpg)