Embed Size (px)
Citation preview
COURS DE MATHÉMATIQUES
Terminale S
Valère BONNET ([email protected])
29 mai 2011
Lycée PONTUS DE TYARD
13 rue des Gaillardons71100 CHALON SUR SAÔNE
Tél. : (33) 03 85 46 85 40Fax : (33) 03 85 46 85 59
FRANCE

ii
LYCÉE PONTUS DE TYARD Terminale VI
Table des matières
Table des matières iii
I Vocabulaire de la logique 1
I.1 Qu’est-ce qu’une proposition ? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
I.2 Négation d’une proposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
I.3 Le « et » . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
I.4 Le « ou » . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
I.5 Propositions et parties d’un ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
I.6 Lois de MORGAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
I.7 Opérations sur les parties d’un ensemble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
I.8 Implications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
I.8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
I.8.2 Réciproque d’une implication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
I.8.3 Contraposée d’une implication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
I.8.4 Implication contraire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
I.9 Double implication ou équivalence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
I.10 Formules récapitulatives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
I.11 Raisonnement par récurrence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
II Révisions 9
II.1 Identités remarquables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
II.2 Éléments de symétries d’une courbe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
II.2.1 Symétries dans IR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
II.2.2 Axe de symétrie d’une courbe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
II.2.3 Centre de symétrie d’une courbe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
II.3 Trigonométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
II.3.1 Quelques valeurs remarquables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
II.3.2 Quelques formules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
II.3.3 Équations trigonométriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
II.4 Géométrie du triangle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
II.4.1 Aire d’un triangle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
II.4.2 Théorème des sinus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
II.4.3 Théorème d’AL KASHI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
II.4.4 Théorème de la médiane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
II.5 Polynômes du second degré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
II.5.1 Forme canonique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
II.5.2 Représentation graphique et sens de variation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
II.5.3 Factorisation et résolution d’équations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
II.5.4 Signe d’un trinôme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
II.5.5 Tableau récapitulatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
II.5.6 Compléments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
II.5.7 Travaux dirigés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
II.5.8 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
II.6 Exercices résolus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
iii
iv Table des matières
III Suites numériques 31III.1 Vocabulaire de l’ordre dans IR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
III.1.1 Majorants, minorants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31III.1.2 Théorème de la borne supérieure (complément) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
III.2 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32III.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32III.2.2 Composée d’une suite par une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32III.2.3 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
III.3 Représentation graphique d’une suite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32III.3.1 Représentation graphique d’une suite définie explicitement . . . . . . . . . . . . . . . . . . . . . . 32III.3.2 Représentation graphique d’une suite définie par récurrence . . . . . . . . . . . . . . . . . . . . . 33III.3.3 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
III.4 Suites bornées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34III.4.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34III.4.2 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
III.5 Suites monotones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35III.5.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35III.5.2 Méthodes d’étude du sens de variation d’une suite . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35III.5.3 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
III.6 Suites arithmétiques - suites géométriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37III.6.1 Suites arithmétiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37III.6.2 Suites géométriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39III.6.3 Exercices résolus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
III.7 Limites de suites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42III.7.1 Limite finie, limite infinie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42III.7.2 Théorèmes de comparaisons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44III.7.3 Calcul algébrique de limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45III.7.4 Limites de suites géométriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48III.7.5 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
III.8 Suites monotones bornées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49III.8.1 Théorème de convergence d’une suite monotone . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49III.8.2 Suites adjacentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50III.8.3 Exercices résolus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50III.8.4 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
III.9 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
IV Limites de fonctions, continuité 53IV.1 Limite finie (ou réelle) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
IV.1.1 Limite d’une fonction en +∞ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53IV.1.2 Limite d’une fonction en un réel a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
IV.2 Notion de continuité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53IV.3 Utilisation de la continuité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
IV.3.1 Continuité et bijection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
V Exponentielles et équations différentielles 57V.1 La fonction exponentielle de base e . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
V.1.1 Propriété fondamentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57V.1.2 Sens de variation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58V.1.3 Autres propriétés algébriques de l’exponentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58V.1.4 Quelques limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
V.2 La fonction logarithme népérien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59V.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59V.2.2 Dérivabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61V.2.3 Dérivée de ln u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61V.2.4 Logarithme népérien et calcul intégral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
V.3 Des exponentielles et des logarithmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62V.3.1 Notation ab , pour a, b réels et a > 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62V.3.2 Fonctions exponentielles de base a (avec a > 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62V.3.3 Fonctions logarithmes de base a (avec a > 0 et a , 1) . . . . . . . . . . . . . . . . . . . . . . . . . . 63
V.4 Équations différentielles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64V.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
LYCÉE PONTUS DE TYARD Terminale VI
Table des matières v
V.4.2 Équations du type y ′−ay = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
V.4.3 Équations du type y ′−ay = b . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
V.4.4 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
VI Dérivabilité 69
VI.1 Fonctions dérivables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
VI.1.1 Nombre dérivé, fonction dérivée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
VI.1.2 Dérivabilité des fonctions usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
VI.1.3 Principaux résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
VI.2 Dérivation d’une fonction composée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
VI.2.1 Théorème de dérivation d’une fonction composée . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
VI.2.2 Dérivée de la fonctionp
u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
VI.2.3 Dérivée de la fonction un (n ∈Z) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
VI.3 Dérivation et études de fonctions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
VI.3.1 Sens de variation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
VI.3.2 Extremum local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
VI.4 Dérivées successives d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
VI.5 Exercices résolus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
VII Nombres complexes 77
VII.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
VII.1.1 Des équations et des ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
VII.1.2 Activités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
VII.1.3 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
VII.1.4 Calcul dansC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
VII.2 Interprétations géométriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
VII.2.1 Affixe, point image, vecteur image . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
VII.2.2 ~u +~u′, k~u, ~MM′ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
VII.2.3 Écriture complexe de certaines symétries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
VII.2.4 Coordonnées polaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
VII.2.5 Module et arguments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
VII.3 Propriétés algébriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
VII.3.1 Propriétés du conjugué . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
VII.3.2 Propriétés du module et des arguments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
VII.3.3 Formule de MOIVRE (complément) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
VII.4 Notation exponentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
VII.4.1 Une équation différentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
VII.4.2 Définitions et propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
VII.4.3 Forme exponentielle et symétries usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
VII.4.4 Formules d’EULER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
VII.4.5 Racines carrées d’un nombre complexe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
VII.5 Nombres complexes et polynômes (compléments) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
VII.5.1 Théorème fondamental de l’algèbre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
VII.5.2 Résolution des équations du second degré . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
VII.6 Utilisation des nombres complexes (compléments) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
VII.6.1 Racines n-ièmes de l’unité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
VII.6.2 Racines n-ièmes d’un nombre complexe non nul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
VII.6.3 Polynômes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
VII.6.4 Forme algébrique des racines carrées d’un nombre complexe . . . . . . . . . . . . . . . . . . . . . 92
VII.6.5 Trigonométrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
VII.7 Géométrie et nombres complexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
VII.7.1 Propriétés générales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
VII.7.2 Écriture complexe de quelques transformations usuelles . . . . . . . . . . . . . . . . . . . . . . . . 95
VII.7.3 Affixe du barycentre d’un système de points pondérés . . . . . . . . . . . . . . . . . . . . . . . . . . 96
- série S
vi Table des matières
VIII Intégration 97VIII.1Primitives d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
VIII.1.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97VIII.1.2Détermination pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98VIII.1.3Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
VIII.2Premiers calculs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99VIII.2.1Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99VIII.2.2Intégrale d’une fonction constante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100VIII.2.3Intégrale d’une fonction en escalier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100VIII.2.4Activité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102VIII.2.5Propriétés des intégrales de fonctions en escalier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
VIII.3Intégrale de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103VIII.3.1Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103VIII.3.2Sommes de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104VIII.3.3Exemple d’intégrale d’une fonction usuelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
VIII.4Théorème fondamental de l’analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108VIII.4.1Problème ouvert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108VIII.4.2Théorème fondamental de l’analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108VIII.4.3Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
VIII.5Proptiétés algébriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110VIII.5.1Relation de Chasles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110VIII.5.2Linéarité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111VIII.5.3Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
VIII.6Propriétés de comparaison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112VIII.6.1Signe de l’intégrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112VIII.6.2Inégalité de la moyenne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113VIII.6.3Valeur moyenne d’une fonction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115VIII.6.4Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
VIII.7Autres techniques de calcul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117VIII.7.1Intégration par parties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117VIII.7.2Intégration et invariance géométrique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118VIII.7.3Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
IX Dénombrement 121IX.1 Notions Préliminaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
IX.1.1 Rappels et compléments sur les ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121IX.1.2 Produit cartésien d’ensembles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
IX.2 Factorielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123IX.3 Tirage de p éléments dans un ensemble à n éléments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
IX.3.1 Tirages successifs avec remise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124IX.3.2 Tirages successifs sans remise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124IX.3.3 Combinaisons - Tirages simultanés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125IX.3.4 Tableau récapitulatif . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
X Calcul des probabilités 131X.1 Calculs de probabilités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
X.1.1 Vocabulaire des événements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131X.1.2 Probabilité d’un événement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132X.1.3 Probabilités conditionnelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
X.2 Variable aléatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138X.2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138X.2.2 Fonction de répartition d’une variable aléatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139X.2.3 Caractéristiques d’une variable aléatoire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139X.2.4 Variables aléatoires indépendantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
X.3 Lois de probabilités discrètes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144X.3.1 Loi binomiale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144X.3.2 Loi de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
X.4 Lois de probabilités continues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148X.4.1 Intégrales généralisées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148X.4.2 Généralités sur lois de probabilités continues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149X.4.3 Loi uniforme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
LYCÉE PONTUS DE TYARD Terminale VI
Table des matières vii
X.4.4 Loi exponentielle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151X.5 Adéquation à la loi équirépartie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
XI Barycentre 153XI.1 Barycentre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
XI.1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153XI.1.2 Activités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153XI.1.3 Définition et propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154XI.1.4 Propriétés . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156XI.1.5 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Index 159
- série S

viii Table des matières
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre I
Vocabulaire de la logique
I.1 Qu’est-ce qu’une proposition ?
DÉFINITION I.1.1 PROPOSITION
Une proposition est un énoncé qui est soit vrai soit faux.
Exemple Considérons un quadrilatère ABCD, dans le plan.On peut envisager les propositions, P : « ABCD est un carré » ;Q : « ABCD est un parallélogramme ».Suivant la nature du quadrilatère ABCD la proposition P, comme la proposition Q, est soit vraie, soit fausse.
I.2 Négation d’une proposition
DÉFINITION I.2.1La négation d’une proposition P est la proposition, notée « non P » ou « P » ou encore « ¬P », qui est fausse lorsque Pest vraie et vraie lorsque P est fausse.
Exemples1. Reprenons les propositions de l’exemple précédent.On a, P : « ABCD n’est pas un carré » ; Q : « ABCD n’est pas un parallélogramme ».2. Soit n un nombre entier.La négation de T : « n est pair » ; est T : « n n’est pas pair » ;c’est-à-dire : « n est impair ».3. Soit x un nombre réel.La négation de R : « x > 2 » ; est , R : « x É 2 ».4. La négation de S : « pour tout réel x : 0 É x2 » ; est S : « il existe un réel x (au moins) tel que : 0 > x2 ».
Remarques
1. La négation de la négation d’une proposition P, c’est-à-dire P, est synonyme de la proposition P elle même. On
écrit : P ≡ P.2. Désignons par K l’intervalle ]2;+∞[ et par K le complémentaire de K dansR ; K est donc l’intervalle ]−∞;2].Les propositions R et R s’écrivent alors R : « x ∈ K » ; et R : « x ∈K ».En effet, les propositions « x ∉K » et « x ∈K » sont synonymes.
I.3 Le « et »
DÉFINITION I.3.1
1
2 I. Vocabulaire de la logique
Soit Q, P deux propositions.La proposition (P et Q) est la proposition qui est vraie lorsque P et Q sont toutes deux vraies, et fausse dans le cascontraire.
Exemples1. Soit x un nombre réel, on considère les propositions P : « 1< x » ; Q : « x É 3 ».P et Q est la proposition : « 1 < x et x É 3 » ; c’est-à-dire : « 1< x É 3 ».2. Considérons un quadrilatère ABCD et les propositions P : « ABCD a deux côtés perpendiculaires » ; Q : « ABCD estun parallélogramme ».On a, P et Q : « ABCD est un parallélogramme qui a deux côtés perpendiculaires ».
Remarques1. Dans le premier exemple, si on désigne par I l’intervalle ]1;+∞[ et par J l’intervalle ]−∞;3], P et Q s’écrivent res-pectivement : « x ∈ I » et « x ∈ J ». La proposition (P et Q) s’écrit alors : « x ∈ I∩ J ». En effet, les propositions « x ∈ I etx ∈ J » et « x ∈ I∩ J » sont synonymes.2. La proposition P et Q est parfois notée : P∧Q.
Exemple Soit A et B parties d’un univers Ω et x un élément de Ω. Considérons les propositions P : « x ∈ A » et Q :« x ∈B ». La proposition P∧Q : « x ∈ A et x ∈ B » est synonyme de :« x ∈ A∪B »
I.4 Le « ou »
Dans le langage courant, le mot « ou » a deux sens distincts : un sens exclusif comme dans l’affirmation « le menupropose fromage ou dessert », et un sens inclusif comme dans la phrase « Les Canadiens parlent l’anglais ou le fran-çais ». Dans le premier cas il signifie « soit fromage,soit dessert », dans le second cas il n’est pas exclu que certainsCanadiens parlent les deux langues. C’est dans ce sens inclusif que « ou » est utilisé en mathématiques et en logique.Quand il est utilisé dans son sens exclusif, en général on le précise.
DÉFINITION I.4.1Soit Q, P deux propositions.La proposition (P ou Q) est la proposition qui est vraie lorsque l’une au moins des propositions Q, P est vraie, et faussedans le cas contraire.
Exemple Soit x un nombre réel, on considère les propositions P : « x É 1 » ; Q : « 3< x ».P ou Q est la proposition : « x É 1 ou 3 < x ».
Remarques1. Reprenons les intervalles I et J introduits dans la remarque précédente.Les propositions P et Q s’écrivent respectivement : « x ∈ I » et « x ∈ J ».La proposition (P ou Q) s’écrit alors : « x ∈ I∪ J ».En effet, les propositions « x ∈ I ou x ∈ J » et « x ∈ I∪ J » sont synonymes.2. La proposition P ou Q est parfois notée : P∨Q
Exemple Soit A et B parties d’un univers Ω et x un élément de Ω. Considérons les propositions P : « x ∈ A » et Q :« x ∈B ». La proposition P∨Q : « x ∈ A et x ∈ B » est synonyme de :« x ∈ A∪B »
I.5 Propositions et parties d’un ensemble
Nous avons constaté à travers les remarques précédentes et nous admettons que de façon générale :– la négation est aux propositions ce que le complémentaire est aux parties d’un ensemble ;– la conjonction (le « et ») est aux propositions ce que l’intersection est aux parties d’un ensemble ;– la disjonction (le « ou ») est aux propositions ce que l’union est aux parties d’un ensemble.
I.6 Lois de MORGAN
F et G désignent deux parties d’un ensemble Ω.
LYCÉE PONTUS DE TYARD Terminale VI
I.7. Opérations sur les parties d’un ensemble 3
Colorier F∪G
F G
Ω Colorier F∩G
F G
Ω
Colorier F∩G
F G
Ω Colorier F∪G
F G
Ω
Soit Q, P deux propositions. Dire que la proposition (P ou Q) est fausse signifie que les propositions Q, P sont toutesdeux fausses.La proposition (non(P ou Q)) est donc synonyme de la proposition ((non P) et (non Q)).
P∨Q≡ P∧Q
De même, dire que la proposition (P et Q) est fausse signifie que l’une au moins des propositions Q, P est fausse.La proposition (non(P et Q)) est donc synonyme de la proposition ((non P) ou (non Q)).
P∧Q≡ P∨Q
Exemples1. x désigne un nombre réel.La négation de « 0 < x et x É 1 » est « 0 Ê x ou x > 1 ».La négation de « 0 < x ou x É−1 » est « 0 Ê x et x >−1 ».2. ABCD désigne un quadrilatère.La négation de « ABCD est un parallélogramme mais n’est pas un carré » est « ABCD est un carré ou n’est pas un pa-rallélogramme».
Remarque Les formules : F∪G = F∩G ; F∩G = F∪G ; P∨Q ≡ P∧Q et P∧Q ≡ P∨Q ; sont appelées lois (ou formules)de Morgan 1.
I.7 Opérations sur les parties d’un ensemble
Soit Ω un ensemble. L’ensemble des parties de Ω est noté : P (Ω).F, G et H désignent trois éléments de P (Ω).
1. MORGAN (AUGUSTUS DE) Inde 1806 - Londres 1871, mathématicien et logicien britannique.
- série S
4 I. Vocabulaire de la logique
Colorier F∪ (G∩H)
F GH
Ω Colorier (F∪G)∩ (F∪H)
F GH
Ω
Colorier F∩ (G∪H)
F GH
Ω Colorier (F∩G)∪ (F∩H)
F GH
Ω
THÉORÈME I.7.1Soit Ω un ensemble. Pour tous éléments F, G, H de P (Ω), on a :
F∩G = G∩F ∩ est commutative dans P (Ω) ;F∪G = G∪F ∪ est commutative dans P (Ω) ;
F∩ (G∩H) = (F∩G)∩H ∩ est associative dans P (Ω) ;F∪ (G∪H) = (F∪G)∪H ∪ est associative dans P (Ω) ;
F∩ (G∪H) = (F∩G)∪ (F∩H) dans P (Ω) ∩ est distributive par rapport à ∪ ;F∪ (G∩H) = (F∪G)∩ (F∪H) dans P (Ω) ∪ est distributive par rapport à ∩ ;
Ω∩F = F∩Ω= F Ω est élément neutre pour ∩ dans P (Ω) ;;∪F= F∪;= F ; est élément neutre pour ∪ dans P (Ω).
Remarques1. Lorsque Ω est non vide,
(
P (Ω) ,∪)
et(
P (Ω) ,∩)
ne sont pas des groupes car la plupart des éléments ne sont pasinversibles.Par exemple il n’existe pas d’élément Ω′ dans P (Ω) tel que : Ω∪Ω′ =∅.2. L’associativité permet de légitimer des écritures telles que F∪G∪H ou F∩G∩H.
On peut réécrire le théorème précédent en remplaçant les parties de Ω par des propositions. On obtient alors le théo-rème suivant.
THÉORÈME I.7.2Soit P, Q, R trois propositions.Les propositions (P et Q) et (Q et P) sont synonymes.Les propositions (P ou Q) et (Q ou P) sont synonymes.Les propositions (P et (Q et R)) et ((P et Q) et R) sont synonymes.Les propositions (P ou (Q ou R)) et ((P ou Q) ou R) sont synonymes.Les propositions (P et (Q ou R)) et ((P et Q) ou (P et R)) sont synonymes.Les propositions (P ou (Q et R)) et ((P ou Q) et (P ou R)) sont synonymes.
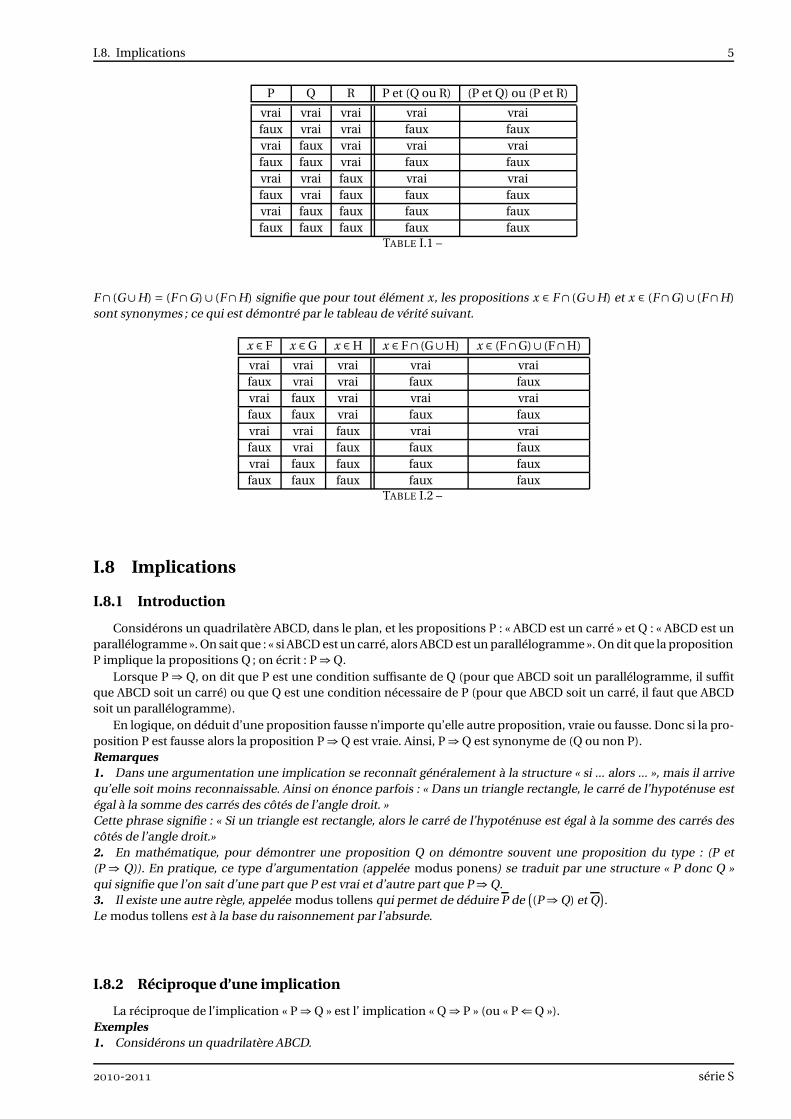
Remarques1. Pour démontrer les propriétés du théorème ci-dessus, on peut utiliser un tableau de vérité. Par exemple le tableauci-dessous envisage dans les trois premières colonnes tous les cas possibles et on constate qu’a chaque fois les pro-positions (P et (Q ou R)) et ((P et Q) ou (P et R)) ont la même valeur, ce qui prouve qu’elles sont synonymes. 2. Pourdémontrer les propriétés du théorème I.7.1, on peut utiliser également un tableau de vérité. Par exemple la propriété
LYCÉE PONTUS DE TYARD Terminale VI
I.8. Implications 5
P Q R P et (Q ou R) (P et Q) ou (P et R)
vrai vrai vrai vrai vraifaux vrai vrai faux fauxvrai faux vrai vrai vraifaux faux vrai faux fauxvrai vrai faux vrai vraifaux vrai faux faux fauxvrai faux faux faux fauxfaux faux faux faux faux
TABLE I.1 –
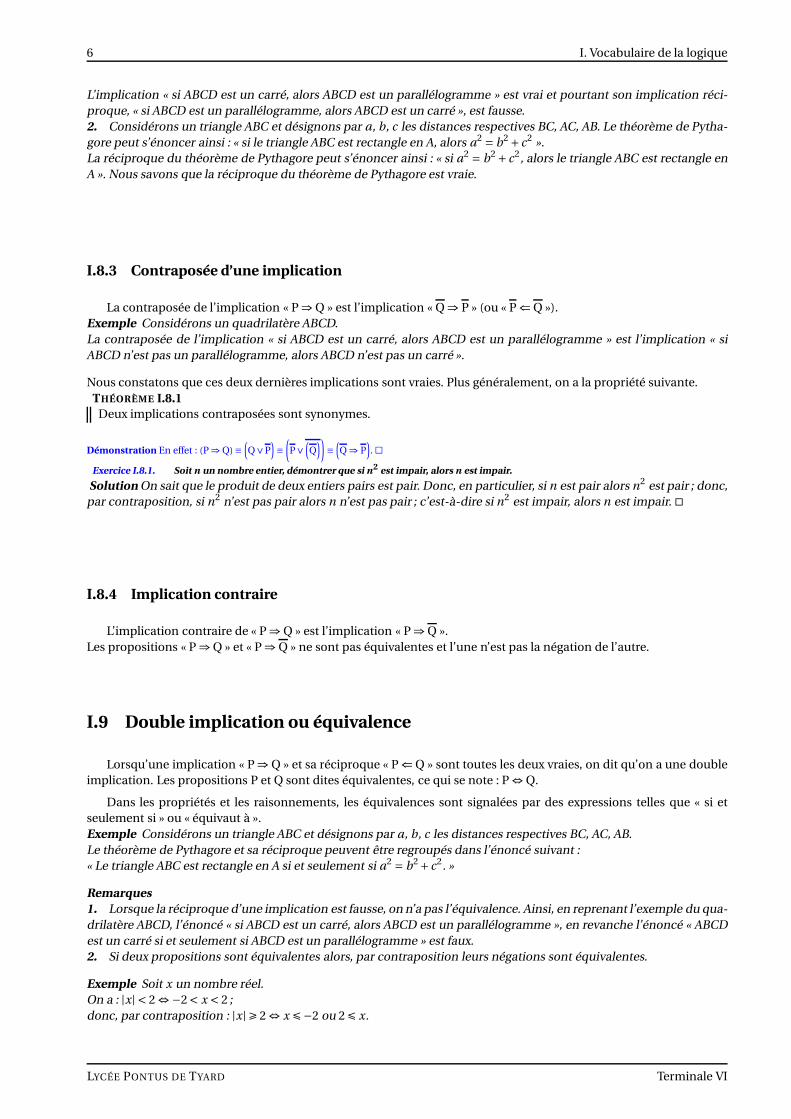
F∩ (G∪H) = (F∩G)∪ (F∩H) signifie que pour tout élément x, les propositions x ∈ F∩ (G∪H) et x ∈ (F∩G)∪ (F∩H)sont synonymes ; ce qui est démontré par le tableau de vérité suivant.
x ∈ F x ∈G x ∈ H x ∈ F∩ (G∪H) x ∈ (F∩G)∪ (F∩H)
vrai vrai vrai vrai vraifaux vrai vrai faux fauxvrai faux vrai vrai vraifaux faux vrai faux fauxvrai vrai faux vrai vraifaux vrai faux faux fauxvrai faux faux faux fauxfaux faux faux faux faux
TABLE I.2 –
I.8 Implications
I.8.1 Introduction
Considérons un quadrilatère ABCD, dans le plan, et les propositions P : « ABCD est un carré » et Q : « ABCD est unparallélogramme ». On sait que : « si ABCD est un carré, alors ABCD est un parallélogramme ». On dit que la propositionP implique la propositions Q ; on écrit : P ⇒Q.
Lorsque P ⇒ Q, on dit que P est une condition suffisante de Q (pour que ABCD soit un parallélogramme, il suffitque ABCD soit un carré) ou que Q est une condition nécessaire de P (pour que ABCD soit un carré, il faut que ABCDsoit un parallélogramme).
En logique, on déduit d’une proposition fausse n’importe qu’elle autre proposition, vraie ou fausse. Donc si la pro-position P est fausse alors la proposition P ⇒ Q est vraie. Ainsi, P ⇒ Q est synonyme de (Q ou non P).Remarques1. Dans une argumentation une implication se reconnaît généralement à la structure « si ... alors ... », mais il arrivequ’elle soit moins reconnaissable. Ainsi on énonce parfois : « Dans un triangle rectangle, le carré de l’hypoténuse estégal à la somme des carrés des côtés de l’angle droit. »Cette phrase signifie : « Si un triangle est rectangle, alors le carré de l’hypoténuse est égal à la somme des carrés descôtés de l’angle droit.»2. En mathématique, pour démontrer une proposition Q on démontre souvent une proposition du type : (P et(P ⇒ Q)). En pratique, ce type d’argumentation (appelée modus ponens) se traduit par une structure « P donc Q »qui signifie que l’on sait d’une part que P est vrai et d’autre part que P ⇒Q.3. Il existe une autre règle, appelée modus tollens qui permet de déduire P de
(
(P ⇒Q) et Q)
.Le modus tollens est à la base du raisonnement par l’absurde.
I.8.2 Réciproque d’une implication
La réciproque de l’implication « P ⇒ Q » est l’ implication « Q ⇒P » (ou « P ⇐Q »).Exemples1. Considérons un quadrilatère ABCD.
- série S
6 I. Vocabulaire de la logique
L’implication « si ABCD est un carré, alors ABCD est un parallélogramme » est vrai et pourtant son implication réci-proque, « si ABCD est un parallélogramme, alors ABCD est un carré », est fausse.2. Considérons un triangle ABC et désignons par a, b, c les distances respectives BC, AC, AB. Le théorème de Pytha-gore peut s’énoncer ainsi : « si le triangle ABC est rectangle en A, alors a2 = b2 +c2 ».La réciproque du théorème de Pythagore peut s’énoncer ainsi : « si a2 = b2 + c2, alors le triangle ABC est rectangle enA ». Nous savons que la réciproque du théorème de Pythagore est vraie.
I.8.3 Contraposée d’une implication
La contraposée de l’implication « P ⇒Q » est l’implication « Q⇒ P » (ou « P ⇐ Q »).Exemple Considérons un quadrilatère ABCD.La contraposée de l’implication « si ABCD est un carré, alors ABCD est un parallélogramme » est l’implication « siABCD n’est pas un parallélogramme, alors ABCD n’est pas un carré ».
Nous constatons que ces deux dernières implications sont vraies. Plus généralement, on a la propriété suivante.THÉORÈME I.8.1
Deux implications contraposées sont synonymes.
Démonstration En effet : (P ⇒Q)≡(
Q∨P)
≡(
P∨(
Q))
≡(
Q ⇒ P)
. ä
Exercice I.8.1. Soit n un nombre entier, démontrer que si n2 est impair, alors n est impair.
Solution On sait que le produit de deux entiers pairs est pair. Donc, en particulier, si n est pair alors n2 est pair ; donc,par contraposition, si n2 n’est pas pair alors n n’est pas pair ; c’est-à-dire si n2 est impair, alors n est impair.
I.8.4 Implication contraire
L’implication contraire de « P ⇒ Q » est l’implication « P ⇒Q ».Les propositions « P ⇒Q » et « P ⇒ Q » ne sont pas équivalentes et l’une n’est pas la négation de l’autre.
I.9 Double implication ou équivalence
Lorsqu’une implication « P ⇒ Q » et sa réciproque « P ⇐ Q » sont toutes les deux vraies, on dit qu’on a une doubleimplication. Les propositions P et Q sont dites équivalentes, ce qui se note : P ⇔ Q.
Dans les propriétés et les raisonnements, les équivalences sont signalées par des expressions telles que « si etseulement si » ou « équivaut à ».Exemple Considérons un triangle ABC et désignons par a, b, c les distances respectives BC, AC, AB.Le théorème de Pythagore et sa réciproque peuvent être regroupés dans l’énoncé suivant :« Le triangle ABC est rectangle en A si et seulement si a2 = b2 +c2. »
Remarques1. Lorsque la réciproque d’une implication est fausse, on n’a pas l’équivalence. Ainsi, en reprenant l’exemple du qua-drilatère ABCD, l’énoncé « si ABCD est un carré, alors ABCD est un parallélogramme », en revanche l’énoncé « ABCDest un carré si et seulement si ABCD est un parallélogramme » est faux.2. Si deux propositions sont équivalentes alors, par contraposition leurs négations sont équivalentes.
Exemple Soit x un nombre réel.On a : |x| < 2 ⇔−2< x < 2 ;donc, par contraposition : |x| Ê 2 ⇔ x É−2 ou 2 É x.
LYCÉE PONTUS DE TYARD Terminale VI
I.10. Formules récapitulatives 7
I.10 Formules récapitulatives
Les principales propriétés évoquées dans cet exposé sont résumées par les formules suivantes.
P ≡ PP∧Q ≡ P∨QP∨Q ≡ P∧Q
(lois de Morgan)
P∧Q ≡ Q∧PP∨Q ≡ Q∨P
(commutativité)
P∧ (Q∧R) ≡ (P∧Q)∧RP∨ (Q∨R) ≡ (P∨Q)∨R
(associativité)
P∧ (Q∨R) ≡ (P∧Q)∨ (P∧R)P∨ (Q∧R) ≡ (P∨Q)∧ (P∨R)
(distributivité)
(P ⇒ Q) ≡(
P ⇐ Q)
(P ⇔ Q) ≡(
P ⇔ Q)
(contraposée)
I.11 Raisonnement par récurrence
Considérons les premiers entiers naturels non nuls et comparons la somme de leurs cubes au carré de leur somme.On a : 13 = 1 et 12 = 1
13 +23 = 9 et (1+2)2 = 913 +23 +33 = 36 et (1+2+3)2 = 36
13 +23 +33 +43 = 100 et (1+2+3+4)2 = 100Cette étude nous amène à conjecturer que pour tout entier naturel non nul n, la proposition
Pn : « 13 +23 +·· ·+n3 = (1+2+·· · +n)2 »
est vraie. Il est malheureusement impossible d’examiner la véracité de chacune de ces propositions. Pour démontrerces propositions, nous allons utiliser une nouvelle méthode de raisonnement appelée raisonnement par récurrence
dont le principe est le suivant : on vérifie que la première proposition est vraie et on démontre que chacune despropositions implique la proposition suivante ; on prouve ainsi, de proche en proche, que toutes les propositions sontvraies.
– D’après l’étude menée, P1 est vraie.– Supposons la proposition Pk vraie pour un certain k ∈N∗ (hypothèse de récurrence) ; c’est-à-dire :
13 +23 +·· ·+k3 = (1+2+·· · +k)2 ; déduisons-en que la proposition Pk+1 est vraie ; c’est-à-dire :13 +23 +·· ·+k3 + (k +1)3 =
(
1+2+·· ·+k + (k +1))2 ;
On a :13 +23 +···+k3 + (k +1)3 = (1+2+··· +k)2 +k(k +1)2 + (k +1)2 (hypothèse de récurrence et développement)
=
[k(k +1)
2
]2+2
k(k +1)
2(k +1)+ (k +1)2 (somme de termes d’une suite arithmétique)
=
[k(k +1)
2+ (k +1)
]2(identité remarquable)
=(1+2+··· +k + (k +1)
)2 (somme de termes d’une suite arithmétique)
Donc, par récurrence, pour tout entier naturel non nul n :
13 +23 +·· ·+n3 = (1+2+·· · +n)2
MMPour démontrer par récurrence qu’une proposition Pn est vraie pour tout entier naturel n supérieur ou égal à n0, on procède en deux
étapes :– on vérifie que la proposition Pn0 est vraie– on démontre, pour tout entier naturel k supérieur ou égal à n0, que si Pk est vraie alors Pk+1 est vraie.
Exercice I.11.1. Démontrer que pour tout entier naturel n, 10n −1 est multiple de 9.
Solution Considérons pour tout n ∈N∗ la proposition Pn : « 10n −1 est multiple de 9 ».100 −1 = 1−1 = 0 = 9×0 donc P0 est vraie.Soit k un entier naturel. Supposons que 10k −1 soit multiple de 9, démontrons que 10k+1 −1 est multiple de 9.10k+1 −1= 9×10k
︸ ︷︷ ︸
multiple de 9
+ 10k −1︸ ︷︷ ︸
multiple de 9 d’aprèsl’hypothèse de récurrence
; donc 10k+1 −1, comme somme de multiples de 9, est multiple de 9.
D’où, par récurrence, pour tout entier naturel n, 10n −1 est multiple de 9.
Exercice I.11.2. (Inégalité de BERNOULLI)
Démontrer que pour tout réel α vérifiant αÊ−1 et pour tout entier naturel non nul n, (1+α)n Ê 1+nα.
- série S
8 I. Vocabulaire de la logique
Solution Soit α un réel vérifiant αÊ−1. Considérons pour tout n ∈N∗ la proposition Bn : « (1+α)n Ê 1+nα ».Pour n = 1, on a : (1+α)n = 1+α et 1+nα= 1+α ; donc B1 est vraie.Soit k un entier naturel. Supposons que : (1+α)n Ê 1+nα ; démontrons que : (1+α)n+1 Ê 1+ (n+1)α.On a : (1+α)n Ê 1+nα et 1+α est positif, donc par produit : (1+α)n+1 Ê (1+nα)(1+α).Or : (1+nα)(1+α) = 1+(n+1)α+nα2 et nα2 Ê 0 ; donc : (1+nα)(1+α) Ê 1+(n+1)α ; puis par transitivité : (1+α)n+1 Ê1+ (n+1)α.Donc par récurrence, pour tout entier naturel non nul n, on a : (1+α)n Ê 1+nα.
Remarques1. La première étape du raisonnement (vérifier que la première proposition est vraie) est essentielle. En considérantles propositions Qn : « 10n est multiple de 9 » ; on démontre comme dans l’exercice I.11.1. que pour tout k : Qk ⇒ Qk+1 ;et pourtant aucune des propositions Qn n’est vraie.2. Lorsqu’un raisonnement par récurrence est entrepris, l’expression « donc par récurrence » doit apparaître dansl’argumentation. Si de plus l’hypothèse de récurrence n’est pas utilisée, le raisonnement est alors faux.
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre II
Révisions
II.1 Identités remarquables
On obtient les identités remarquables suivantes par simple développement. Elles servent à développer des expres-sions factorisées ou à factoriser des expressions développées.
(a +b)2 = a2 +2ab +b2 (II.1)
(a −b)2 = a2 −2ab +b2 (II.2)
(a −b)(a +b) = a2 −b2 (II.3)
(a +b)3 = a3 +3a2b +3ab2 +b3 (II.4)
(a +b)3 = a3 −3a2b +3ab2 −b3 (II.5)
(a −b)(a2 +ab +b2) = a3 −b3 (II.6)
(a +b)(a2 −ab +b2) = a3 +b3 (II.7)
II.2 Éléments de symétries d’une courbe
Dans toute cette partie f désignera une fonction numérique à variable réelle, D f son ensemble de définition etC f sa représentation graphique relativement à un repère orthogonal
(
O;~ı ,~)
.
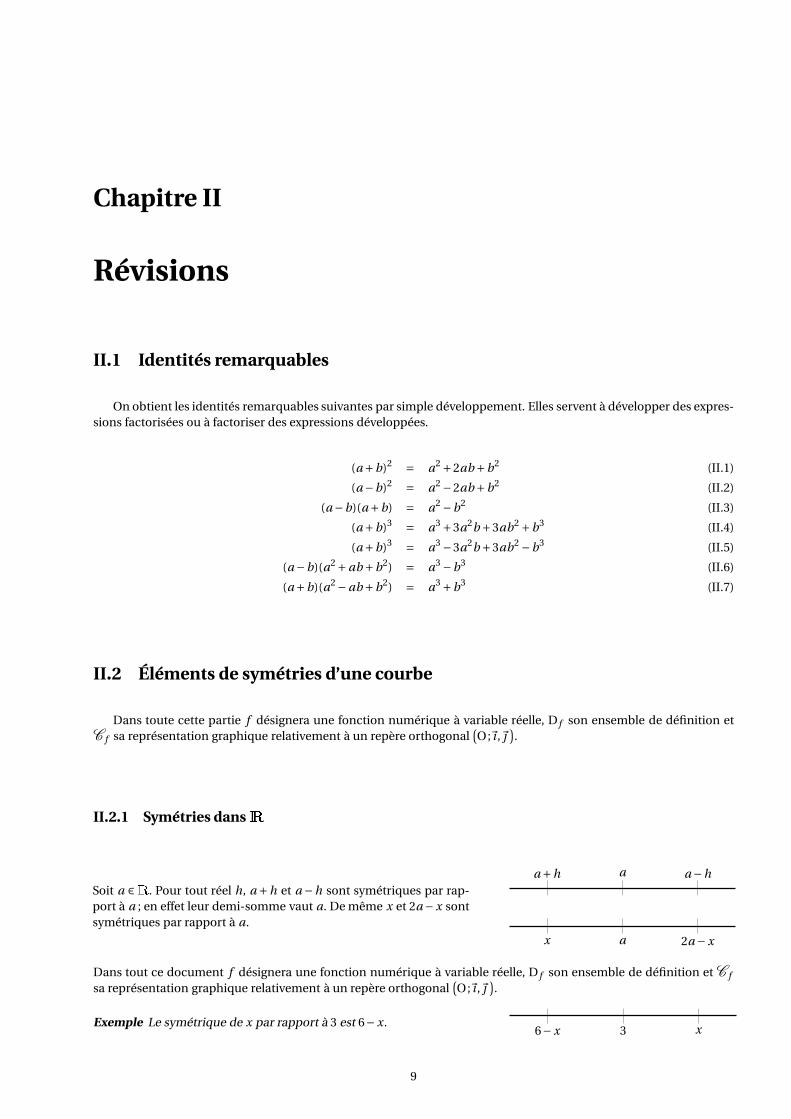
II.2.1 Symétries dansRSoit a ∈R. Pour tout réel h, a +h et a −h sont symétriques par rap-port à a ; en effet leur demi-somme vaut a. De même x et 2a − x sontsymétriques par rapport à a.
x 2a − xa
a +h a −ha
Dans tout ce document f désignera une fonction numérique à variable réelle, D f son ensemble de définition et C f
sa représentation graphique relativement à un repère orthogonal(
O;~ı ,~)
.
Exemple Le symétrique de x par rapport à 3 est 6− x.6− x x3
9
10 II. Révisions
II.2.2 Axe de symétrie d’une courbe
Une observation graphique permet d’énoncer les théorèmes suivants que nous admettons.
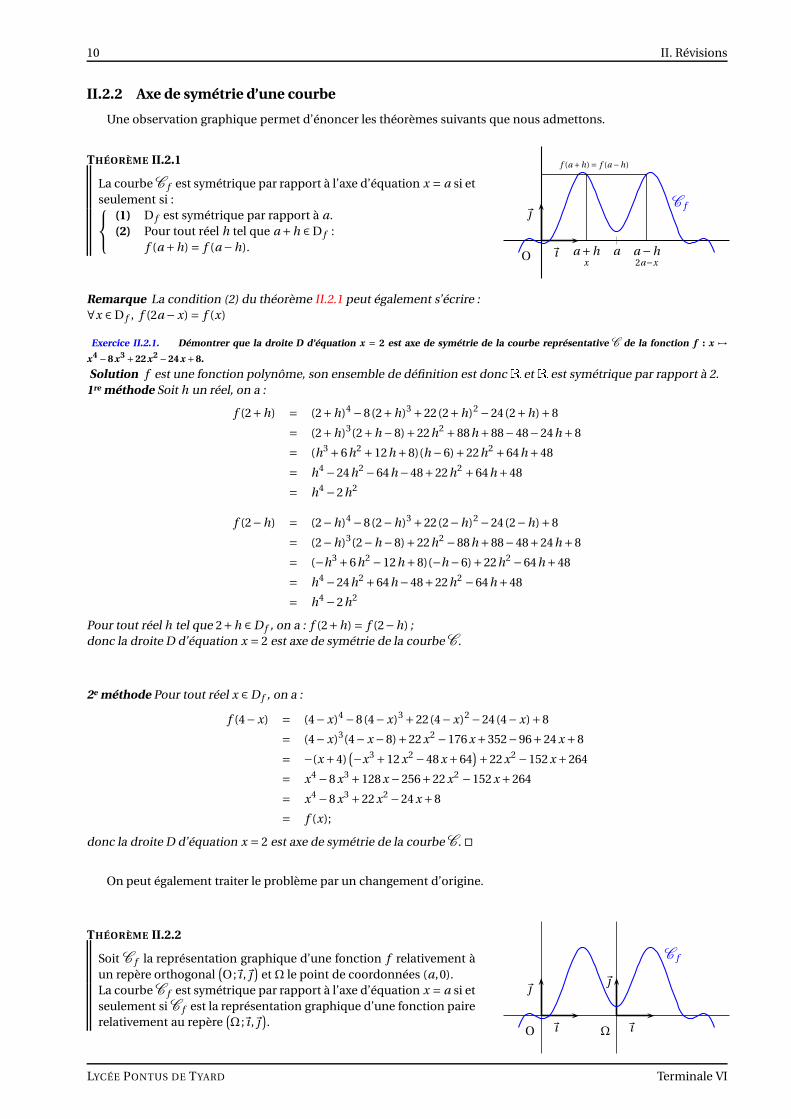
THÉORÈME II.2.1
La courbe C f est symétrique par rapport à l’axe d’équation x = a si etseulement si :
(1) D f est symétrique par rapport à a.(2) Pour tout réel h tel que a +h ∈D f :
f (a +h) = f (a −h). ~ı
~
O
C f
a
f (a +h)= f (a −h)
a +hx
a −h2a−x
Remarque La condition (2) du théorème II.2.1 peut également s’écrire :∀x ∈ D f , f (2a − x) = f (x)
Exercice II.2.1. Démontrer que la droite D d’équation x = 2 est axe de symétrie de la courbe représentative C de la fonction f : x 7→x4 −8 x3 +22 x2 −24 x +8.
Solution f est une fonction polynôme, son ensemble de définition est doncR etR est symétrique par rapport à 2.1re méthode Soit h un réel, on a :
f (2+h) = (2+h)4 −8(2+h)3 +22(2+h)2 −24(2+h)+8
= (2+h)3(2+h−8)+22h2 +88h+88−48−24h +8
= (h3 +6h2 +12h+8)(h−6)+22h2 +64h+48
= h4 −24h2 −64h−48+22h2 +64h+48
= h4 −2h2
f (2−h) = (2−h)4 −8(2−h)3 +22(2−h)2 −24(2−h)+8
= (2−h)3(2−h−8)+22h2 −88h+88−48+24h +8
= (−h3 +6h2 −12h+8)(−h−6)+22h2 −64h+48
= h4 −24h2 +64h−48+22h2 −64h+48
= h4 −2h2
Pour tout réel h tel que 2+h ∈ D f , on a : f (2+h) = f (2−h) ;donc la droite D d’équation x = 2 est axe de symétrie de la courbe C.
2e méthode Pour tout réel x ∈ D f , on a :
f (4− x) = (4− x)4 −8(4− x)3 +22(4− x)2 −24(4− x)+8
= (4− x)3(4− x −8)+22 x2 −176 x +352−96+24 x +8
= −(x +4)(
−x3 +12 x2 −48 x +64)
+22 x2 −152 x +264
= x4 −8 x3 +128 x −256+22 x2 −152 x +264
= x4 −8 x3 +22 x2 −24 x +8
= f (x);
donc la droite D d’équation x = 2 est axe de symétrie de la courbe C.
On peut également traiter le problème par un changement d’origine.
THÉORÈME II.2.2
Soit C f la représentation graphique d’une fonction f relativement àun repère orthogonal
(
O;~ı ,~)
et Ω le point de coordonnées (a,0).La courbe C f est symétrique par rapport à l’axe d’équation x = a si etseulement si C f est la représentation graphique d’une fonction pairerelativement au repère
(
Ω ;~ı ,~)
. ~ı ~ı
~~
O Ω
C f
LYCÉE PONTUS DE TYARD Terminale VI
II.2. Éléments de symétries d’une courbe 11
Exercice II.2.2. Démontrer que la droite D d’équation x = 2 est axe de symétrie de la courbe représentative C de la fonction f : x 7→x4 −8 x3 +22 x2 −24 x +8.
Solution Soit Ω(2,0), M un point du plan, (x, y) ses coordonnées dans le repère(
O;~ı ,~)
et (X,Y) ses coordonnées dansle repère
(
Ω ;~ı ,~)
. On a donc :
−−→OM =−−→
ΩM +−−→OΩ avec
−−→OM = x~ı + y~ ;
−−→ΩM = X~ı +Y~ et
−−→OΩ = 2~ı
Deux vecteurs sont égaux si et seulement si ils ont le même couple de coordonnées, on a donc la formule de change-ment de repère :
x = X+2y = Y
.
On a donc :
M ∈C ⇐⇒ y = x4 −8 x3 +22 x2 −24 x +8
⇐⇒ Y = (X+2)4 −8(X+2)3 +22(X+2)2 −24(X+2)+8...
⇐⇒ Y = X4 −2X2
La fonction polynôme p : x 7→ x4 −2x2 est définie surR et pour tout réel x :
p(−x)= (−x)4 −2(−x)2 = x4 −2x2 = p(x).
Donc p est une fonction paire et par suite la droite D d’équation x = 2 est axe de symétrie de la courbe C.
II.2.3 Centre de symétrie d’une courbe
Une observation graphique permet d’énoncer les théorèmes suivants que nous admettons.
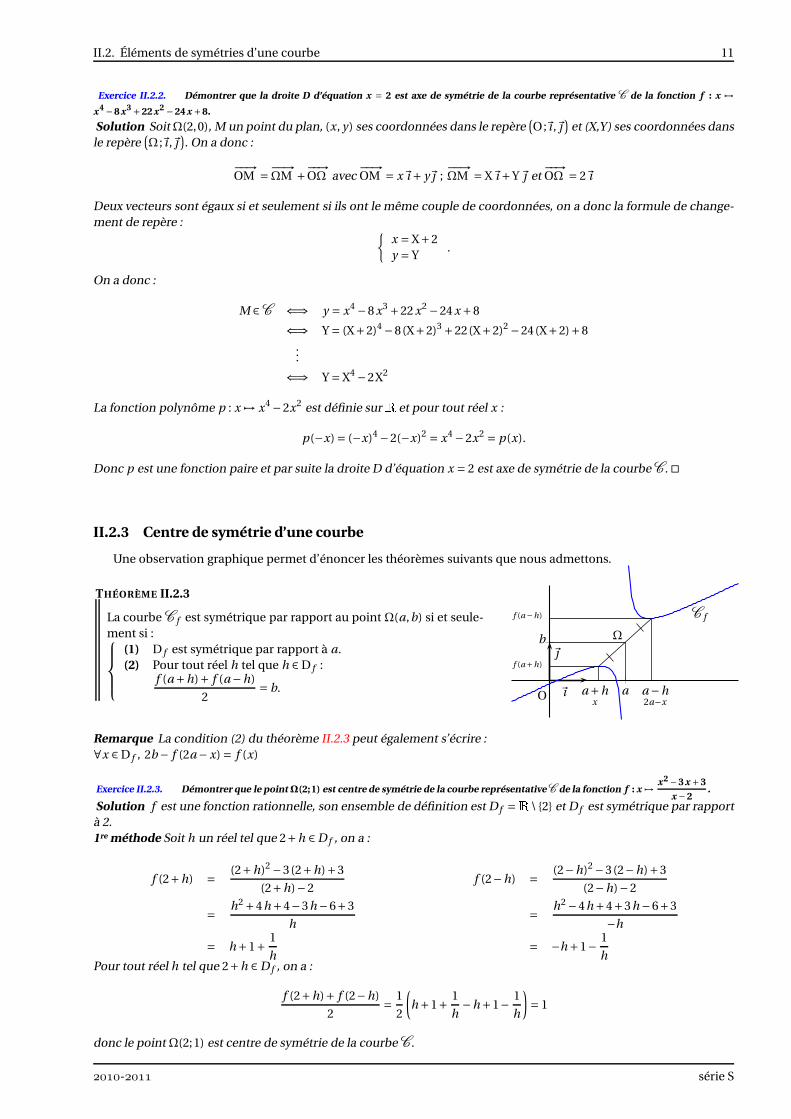
THÉORÈME II.2.3
La courbe C f est symétrique par rapport au point Ω(a,b) si et seule-ment si :
(1) D f est symétrique par rapport à a.(2) Pour tout réel h tel que h ∈ D f :
f (a +h)+ f (a −h)
2= b. ~ı
~
O
C f
a
b
f (a −h)
f (a +h)
a +hx
a −h2a−x
Ω
Remarque La condition (2) du théorème II.2.3 peut également s’écrire :∀x ∈D f , 2b − f (2a − x) = f (x)
Exercice II.2.3. Démontrer que le point Ω(2;1) est centre de symétrie de la courbe représentative C de la fonction f : x 7→x2 −3 x +3
x −2.
Solution f est une fonction rationnelle, son ensemble de définition est D f =R\ 2 et D f est symétrique par rapportà 2.1re méthode Soit h un réel tel que 2+h ∈D f , on a :
f (2+h) =(2+h)2 −3(2+h)+3
(2+h)−2
=h2 +4h+4−3h−6+3
h
= h+1+1
h
f (2−h) =(2−h)2 −3(2−h)+3
(2−h)−2
=h2 −4h+4+3h−6+3
−h
= −h+1−1
hPour tout réel h tel que 2+h ∈ D f , on a :
f (2+h)+ f (2−h)
2=
1
2
(
h+1+1
h−h+1−
1
h
)
= 1
donc le point Ω(2;1) est centre de symétrie de la courbe C.
- série S

12 II. Révisions
2e méthode Pour tout x de D f , on a :
2− f (4− x) = 2−(4− x)2 −3(4− x)+3
(4− x)−2
=2(
2− x)
−(
x2 −8 x +16+3 x −12+3)
2− x
=−x2 +3 x −3
2− x= f (x)
donc le point Ω(2;1) est centre de symétrie de la courbe C.
On peut également traiter le problème par un changement d’origine.
THÉORÈME II.2.4
Soit C f la représentation graphique d’une fonction f relativement àun repère orthogonal
(
O;~ı ,~)
et Ω le point de coordonnées (a,b).La courbe C f est symétrique par rapport à Ω si et seulement si C f estla représentation graphique d’une fonction impaire relativement aurepère
(
Ω ;~ı ,~)
. ~ı
~
O
C f
a
b Ω
~i
~i
~j
Exercice II.2.4. Démontrer que le point Ω(2;1) est centre de symétrie de la courbe représentative C de la fonction f : x 7→x2 −3 x +3
x −2.
Solution Soit M un point du plan, (x, y) ses coordonnées dans le repère(
O;~ı ,~)
et (X,Y) ses coordonnées dans lerepère
(
Ω ;~ı ,~)
. On a donc :
−−→OM =−−→
ΩM +−−→OΩ avec
−−→OM = x~ı + y ~ ;
−−→ΩM = X~ı +Y~ et
−−→OΩ = 2~ı +~
Deux vecteurs sont égaux si et seulement si ils ont le même couple de coordonnées, on a donc la formule de change-ment de repère :
x = X+2y = Y+1
.
On a donc :
M ∈C ⇐⇒ y =x2 −3 x +3
x −2
⇐⇒ Y+1 =(X+2)2 −3(X+2)+3
(X+2)−2...
⇐⇒ Y = X+1
X
La fonction rationnelle g : x 7→ x +1
xest définie surR∗ et pour tout réel non nul x :
g (−x) = (−x)+1
−x=−
(
x +1
x
)
=−g (x).
Donc g est une fonction impaire et par suite le point Ω(2;1) est centre de symétrie de la courbe C.
II.3 Trigonométrie
II.3.1 Quelques valeurs remarquables
Le tableau ci-dessus a été vu en classe de 2e.
LYCÉE PONTUS DE TYARD Terminale VI
II.3. Trigonométrie 13
x 0π
6
π
4
π
3
π
2
cos x 1
p3
2
p2
2
1
20
sin x 01
2
p2
2
p3
21
tan x 0
p3
31
p3 non déf.
0
1
1 x
p3
2
p2
2
1
2
y
p3
2p2
2
1
2
M(0)
M( π
2
)
M( π
3
)
M( π
4
)
M( π
6
)
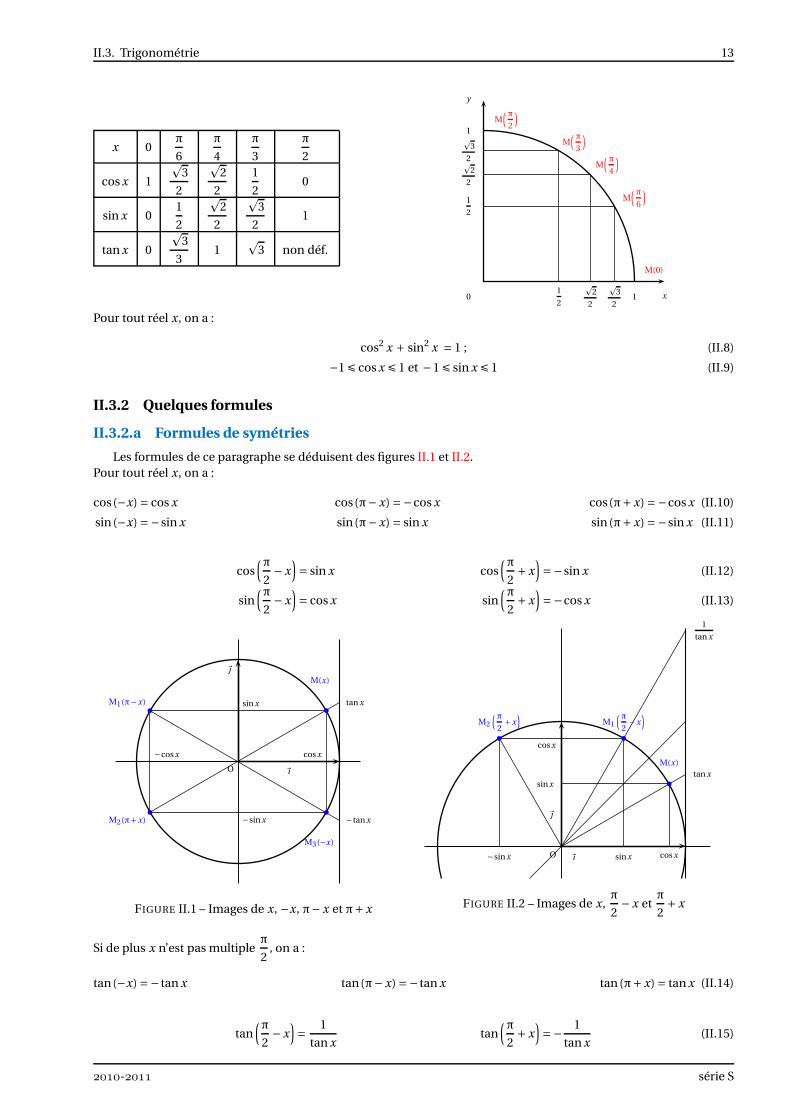
Pour tout réel x, on a :
cos2 x + sin2 x = 1 ; (II.8)
−1 É cos x É 1 et −1 É sin x É 1 (II.9)
II.3.2 Quelques formules
II.3.2.a Formules de symétries
Les formules de ce paragraphe se déduisent des figures II.1 et II.2.Pour tout réel x, on a :
cos(−x) = cos x cos(π− x) =−cos x cos(π+ x) =−cos x (II.10)
sin (−x) =−sin x sin(π− x) = sin x sin (π+ x) =−sin x (II.11)
cos(π
2− x
)
= sin x cos(π
2+ x
)
=−sin x (II.12)
sin(π
2− x
)
= cos x sin(π
2+ x
)
=−cos x (II.13)
O ~ı
~
M(x)
M1(π−x)
M2(π+x)
M3(−x)
−cos x cos x
sin x
−sin x
tan x
− tan x
b b
bb
FIGURE II.1 – Images de x, −x, π− x et π+ x
O ~ı
~
M(x)
M1
(π
2−x
)
M2
(π
2+x
)
cos x
sin x
cos x
tan x
1
tan x
sinx−sin x
bb
b
FIGURE II.2 – Images de x,π
2− x et
π
2+ x
Si de plus x n’est pas multipleπ
2, on a :
tan(−x) =− tan x tan(π− x) =− tan x tan (π+ x) = tan x (II.14)
tan(π
2− x
)
=1
tan xtan
(π
2+ x
)
=−1
tan x(II.15)
- série S

14 II. Révisions
II.3.2.b Formules d’addition
Pour tous réel a et b, on a :
cos(a +b) = cos a cosb − sin a sin b sin(a +b) = sin a cosb + sin b cos a (II.16)
cos(a −b) = cos a cosb + sin a sin b sin(a −b) = sin a cosb − sin b cos a (II.17)
Si de plus ni a ni b ni a +b ne sont de la formeπ
2+kπ (k ∈Z), on a :
tan(a +b)=tan a + tan b
1− tan a tanbtan(a −b)=
tan a − tan b
1+ tan a tanb(II.18)
II.3.2.c Formules de duplication
En prenant : a = b = x ; dans les formules (II.16), (II.17) et (II.18), on obtient les formules suivantes.Pour tout réel x, on a :
cos 2x = cos2 x − sin2 x = 2cos2 x −1 = 1−2sin2 x sin 2x = 2sin x cos x (II.19)
Si de plus x n’est pas multipleπ
4, on a :
tan 2x =2tan x
1− tan2 x(II.20)
En posant : t = tanx
2; on déduit des formules (II.19) et (II.20), lorsque t et tan x son définis :
cos x =1− t 2
1+ t 2sin x =
2t
1+ t 2tan x =
2t
1− t 2(II.21)
II.3.2.d Sommes différences et produits de fonction circulaires
En posant p = a +b et q = a −b dans (II.16) et (II.17), on démontre que pour tous réels p et q , on a :
cos(p)+cos(q) = 2cos( p +q
2
)
cos( p −q
2
)
sin(p)+ sin(q) = 2sin( p +q
2
)
cos( p −q
2
)
(II.22)
cos(p)−cos(q) =−2sin( p +q
2
)
sin( p −q
2
)
sin(p)− sin(q) = 2cos( p +q
2
)
sin( p −q
2
)
(II.23)
On déduit par addition ou soustraction dans les formules (II.16) et (II.17) que pour tous réels a et b :
cos a cos b = cos(a +b)+cos(a −b) (II.24)
sin a sin b = cos(a +b)−cos(a −b) (II.25)
sin a cos b = sin(a +b)+ sin(a −b) (II.26)
II.3.3 Équations trigonométriques
LYCÉE PONTUS DE TYARD Terminale VI
II.3. Trigonométrie 15
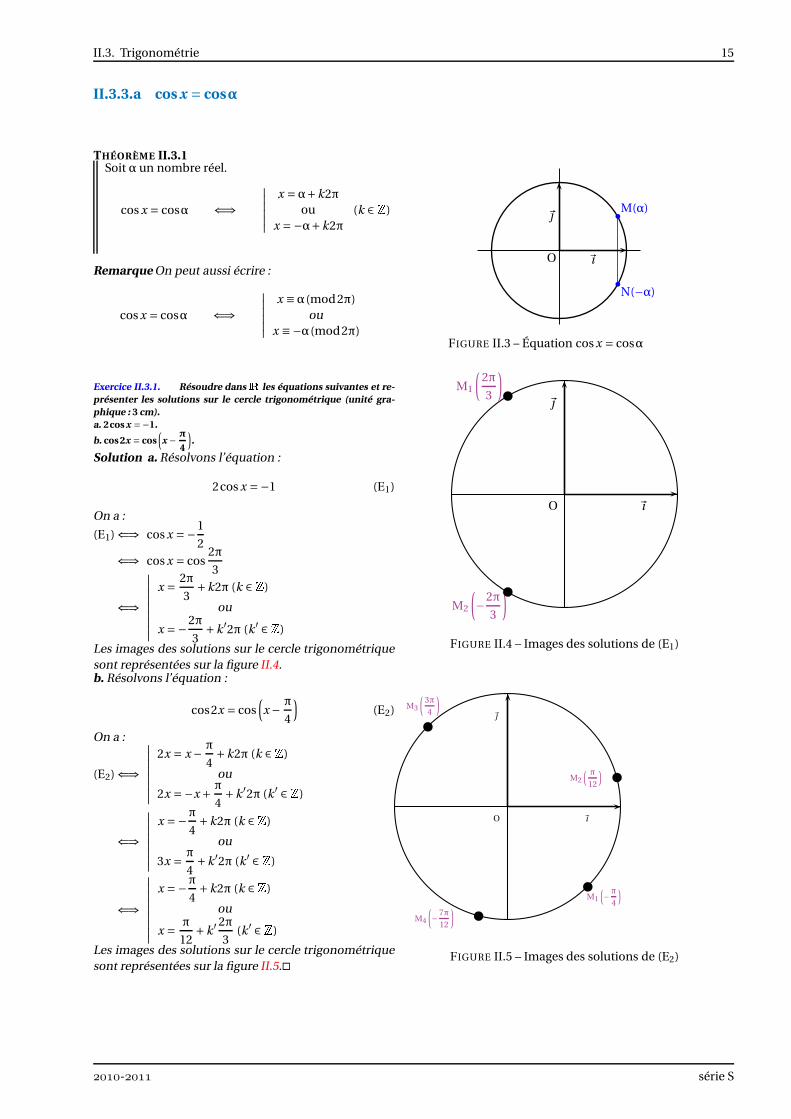
II.3.3.a cos x = cosα
THÉORÈME II.3.1Soit α un nombre réel.
cos x = cosα ⇐⇒
∣∣∣∣∣∣
x =α+k2πou
x =−α+k2π(k ∈Z)
Remarque On peut aussi écrire :
cos x = cosα ⇐⇒
∣∣∣∣∣∣
x ≡α(mod 2π)ou
x ≡−α(mod2π)
O ~ı
~
N(−α)
M(α)
b
b
FIGURE II.3 – Équation cos x = cosα
Exercice II.3.1. Résoudre dansR les équations suivantes et re-présenter les solutions sur le cercle trigonométrique (unité gra-phique : 3 cm).a. 2cos x =−1.
b. cos 2x = cos(
x −π
4
)
.
Solution a. Résolvons l’équation :
2cos x =−1 (E1)
On a :
(E1) ⇐⇒ cos x =−1
2⇐⇒ cos x = cos
2π
3
⇐⇒
∣∣∣∣∣∣∣∣∣
x =2π
3+k2π (k ∈Z)
ou
x =−2π
3+k ′2π (k ′ ∈Z)
Les images des solutions sur le cercle trigonométriquesont représentées sur la figure II.4.
~ı
~
O
M1
(2π
3
)
M2
(
−2π
3
)
b
b
FIGURE II.4 – Images des solutions de (E1)
b. Résolvons l’équation :
cos2x = cos(
x −π
4
)
(E2)
On a :
(E2) ⇐⇒
∣∣∣∣∣∣∣∣
2x = x −π
4+k2π (k ∈Z)
ou
2x =−x +π
4+k ′2π (k ′ ∈Z)
⇐⇒
∣∣∣∣∣∣∣∣
x =−π
4+k2π (k ∈Z)
ou
3x =π
4+k ′2π (k ′ ∈Z)
⇐⇒
∣∣∣∣∣∣∣∣∣
x =−π
4+k2π (k ∈Z)
ou
x =π
12+k ′ 2π
3(k ′ ∈Z)
Les images des solutions sur le cercle trigonométriquesont représentées sur la figure II.5.
~ı
~
O
M1
(
−π
4
)
M2
( π
12
)
M3
(3π
4
)
M4
(
−7π
12
)
b
b
b
b
FIGURE II.5 – Images des solutions de (E2)
- série S
16 II. Révisions
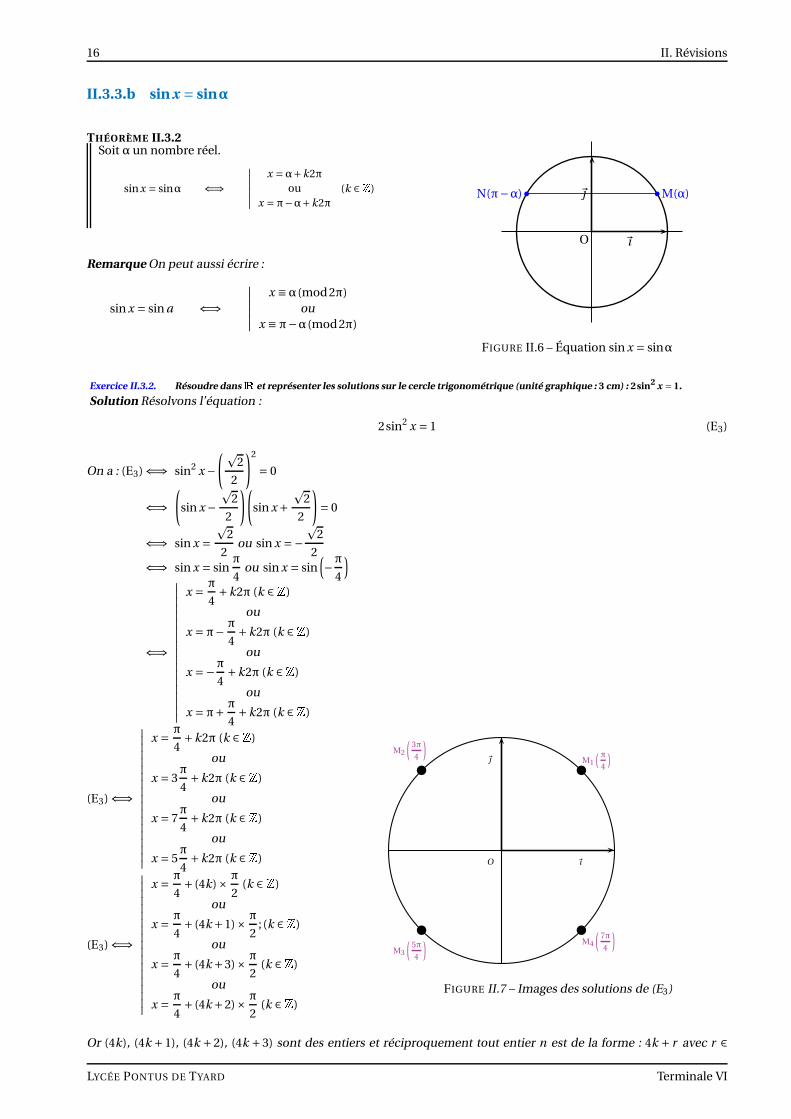
II.3.3.b sin x = sinα
THÉORÈME II.3.2Soit α un nombre réel.
sinx = sinα ⇐⇒
∣∣∣∣∣∣
x =α+k2πou
x =π−α+k2π(k ∈Z)
Remarque On peut aussi écrire :
sin x = sin a ⇐⇒
∣∣∣∣∣∣
x ≡α(mod 2π)ou
x ≡π−α(mod 2π)
O ~ı
~N(π−α) M(α)b b
FIGURE II.6 – Équation sin x = sinα
Exercice II.3.2. Résoudre dansR et représenter les solutions sur le cercle trigonométrique (unité graphique : 3 cm) : 2sin2 x = 1.
Solution Résolvons l’équation :
2sin2 x = 1 (E3)
On a : (E3) ⇐⇒ sin2 x −( p
2
2
)2
= 0
⇐⇒(
sin x −p
2
2
)(
sin x +p
2
2
)
= 0
⇐⇒ sin x =p
2
2ou sin x =−
p2
2⇐⇒ sin x = sin
π
4ou sin x = sin
(
−π
4
)
⇐⇒
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
x =π
4+k2π (k ∈Z)
ou
x =π−π
4+k2π (k ∈Z)
ou
x =−π
4+k2π (k ∈Z)
ou
x =π+π
4+k2π (k ∈Z)
(E3) ⇐⇒
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
x =π
4+k2π (k ∈Z)
ou
x = 3π
4+k2π (k ∈Z)
ou
x = 7π
4+k2π (k ∈Z)
ou
x = 5π
4+k2π (k ∈Z)
(E3) ⇐⇒
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
x =π
4+ (4k)×
π
2(k ∈Z)
ou
x =π
4+ (4k +1)×
π
2;(k ∈Z)
ou
x =π
4+ (4k +3)×
π
2(k ∈Z)
ou
x =π
4+ (4k +2)×
π
2(k ∈Z)
~ı
~
O
M1
( π
4
)M2
(3π
4
)
M4
(7π
4
)
M3
(5π
4
)
bb
bb
FIGURE II.7 – Images des solutions de (E3)
Or (4k), (4k +1), (4k +2), (4k +3) sont des entiers et réciproquement tout entier n est de la forme : 4k + r avec r ∈
LYCÉE PONTUS DE TYARD Terminale VI
II.3. Trigonométrie 17
0;1;2;3 ; en effet, k et r sont respectivement le quotient et le reste de la division euclidienne de n par 4 ; donc :
(E3) ⇐⇒ x =π
4+n
π
2(n ∈Z)
Les images des solutions sur le cercle trigonométrique sont représentées sur la figure II.7.
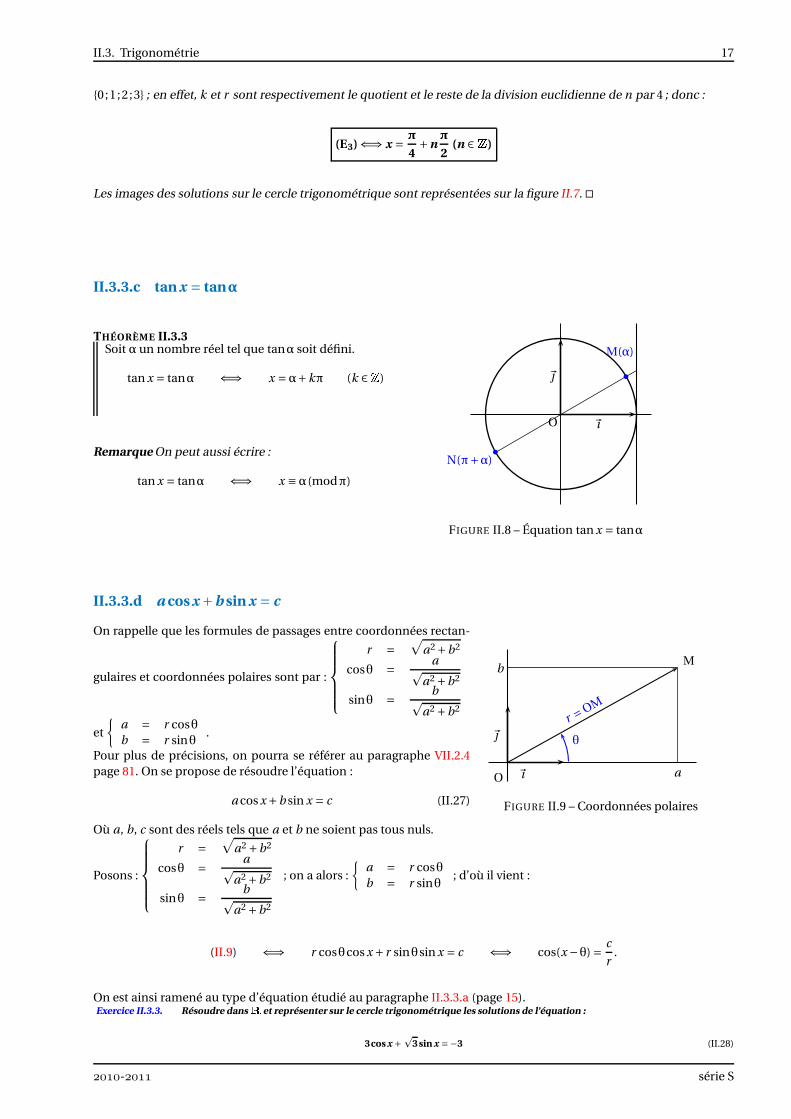
II.3.3.c tan x = tanα
THÉORÈME II.3.3Soit α un nombre réel tel que tanα soit défini.
tan x = tanα ⇐⇒ x =α+kπ (k ∈Z)
Remarque On peut aussi écrire :
tan x = tanα ⇐⇒ x ≡α(modπ)
O ~ı
~
N(π+α)
M(α)
b
b
FIGURE II.8 – Équation tan x = tanα
II.3.3.d a cos x +b sin x = c
On rappelle que les formules de passages entre coordonnées rectan-
gulaires et coordonnées polaires sont par :
r =√
a2 +b2
cosθ =a
pa2 +b2
sinθ =b
pa2 +b2
et
a = r cosθb = r sinθ
.
Pour plus de précisions, on pourra se référer au paragraphe VII.2.4page 81. On se propose de résoudre l’équation :
a cos x +b sin x = c (II.27)
Où a, b, c sont des réels tels que a et b ne soient pas tous nuls.
~ı
~
O a
b
θ
r =OM
M
FIGURE II.9 – Coordonnées polaires
Posons :
r =√
a2 +b2
cosθ =a
pa2 +b2
sinθ =b
pa2 +b2
; on a alors :
a = r cosθb = r sinθ
; d’où il vient :
(II.9) ⇐⇒ r cosθcos x + r sinθsin x = c ⇐⇒ cos(x −θ) =c
r.
On est ainsi ramené au type d’équation étudié au paragraphe II.3.3.a (page 15).Exercice II.3.3. Résoudre dansR et représenter sur le cercle trigonométrique les solutions de l’équation :
3cos x +p
3 sin x =−3 (II.28)
- série S
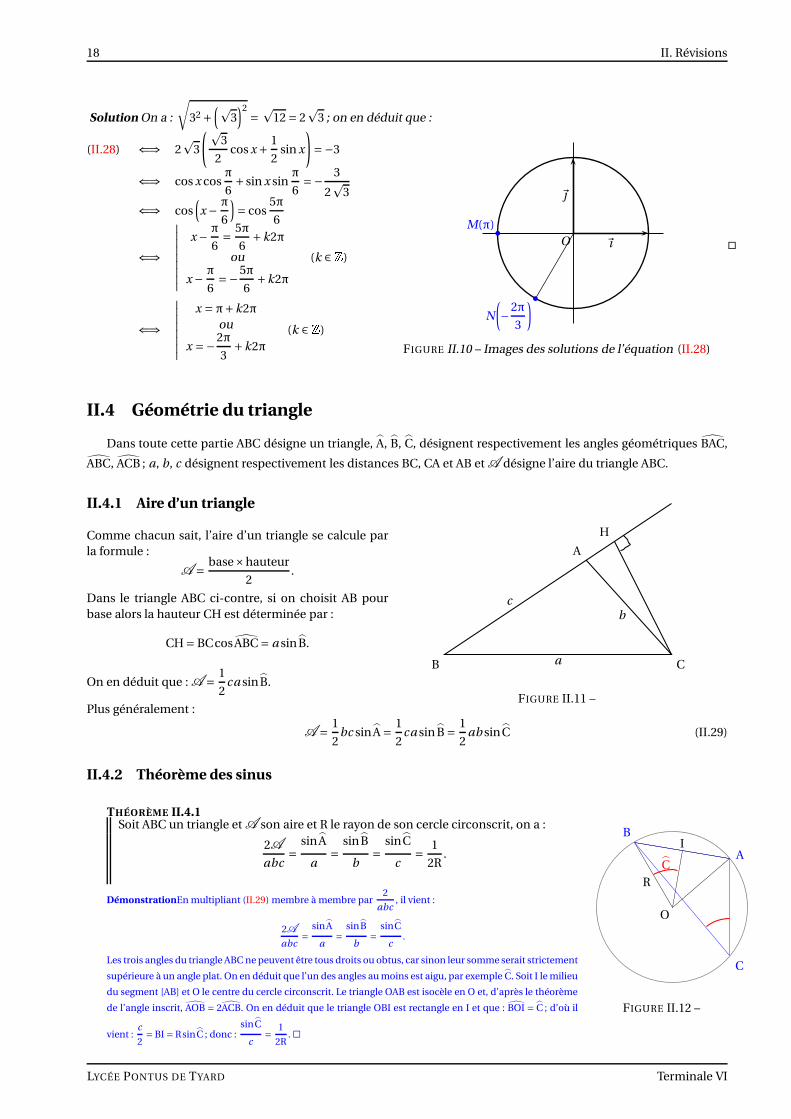
18 II. Révisions
Solution On a :
√
32 +(p
3)2
=p
12 = 2p
3 ; on en déduit que :
(II.28) ⇐⇒ 2p
3
( p3
2cos x +
1
2sin x
)
=−3
⇐⇒ cos x cosπ
6+ sin x sin
π
6=−
3
2p
3
⇐⇒ cos(
x −π
6
)
= cos5π
6
⇐⇒
∣∣∣∣∣∣∣∣∣
x −π
6=
5π
6+k2π
ou
x −π
6=−
5π
6+k2π
(k ∈Z)
⇐⇒
∣∣∣∣∣∣∣∣
x =π+k2πou
x =−2π
3+k2π
(k ∈Z)
O ~ı
~
M(π)
N
(
−2π
3
)
b
b
FIGURE II.10 – Images des solutions de l’équation (II.28)
II.4 Géométrie du triangle
Dans toute cette partie ABC désigne un triangle, A, B, C, désignent respectivement les angles géométriques BAC,
ABC, ACB; a, b, c désignent respectivement les distances BC, CA et AB et A désigne l’aire du triangle ABC.
II.4.1 Aire d’un triangle
Comme chacun sait, l’aire d’un triangle se calcule parla formule :
A=base×hauteur
2.
Dans le triangle ABC ci-contre, si on choisit AB pourbase alors la hauteur CH est déterminée par :
CH = BCcos ABC= a sin B.
On en déduit que : A=1
2ca sin B.
A
B C
H
c
a
b
FIGURE II.11 –Plus généralement :
A=1
2bc sin A=
1
2ca sin B=
1
2ab sin C (II.29)
II.4.2 Théorème des sinus
THÉORÈME II.4.1Soit ABC un triangle et A son aire et R le rayon de son cercle circonscrit, on a :
2A
abc=
sin A
a=
sin B
b=
sinC
c=
1
2R.
DémonstrationEn multipliant (II.29) membre à membre par2
abc, il vient :
2A
abc=
sinA
a=
sinB
b=
sinC
c.
Les trois angles du triangle ABC ne peuvent être tous droits ou obtus, car sinon leur somme serait strictement
supérieure à un angle plat. On en déduit que l’un des angles au moins est aigu, par exemple C. Soit I le milieu
du segment [AB] et O le centre du cercle circonscrit. Le triangle OAB est isocèle en O et, d’après le théorème
de l’angle inscrit, AOB= 2ACB. On en déduit que le triangle OBI est rectangle en I et que : BOI= C; d’où il
vient :c
2=BI =RsinC; donc :
sinC
c=
1
2R. ä
A
B
C
O
R
I
C
FIGURE II.12 –
LYCÉE PONTUS DE TYARD Terminale VI

II.5. Polynômes du second degré 19
II.4.3 Théorème d’AL KASHI
THÉORÈME II.4.2Soit ABC un triangle, on a :(1) a2 = b2 +c2 −2bc cos A
(2) b2 = c2 +a2 −2ca cos B
(3) c2 = a2 +b2 −2ab cos C
Démonstration (1) On a : a2 =−−→BC 2 =
(−−→AC −−−→
AB)2
=AC2 +AB2 −2−−→AC ·
−−→AB = b2 +c2 −2bc cos A.
On démontre de même (2) et (3). äRemarques1. Lorsque l’un des angles est droit, on retrouve le théorème de PYTHAGORE ; en effet si par exemple l’angle Aest
droit, (1) devient : a2 = b2 +c2.2. Le théorème des sinus (II.4.1) et le théorème d’ AL KASHI (II.4.2) permettent lorsqu’elle est possible la résolutiondes triangles 1.
II.4.4 Théorème de la médiane
THÉORÈME II.4.3Soit ABC un triangle et A’ le milieu de [BC], on a :
(1) 2AA′2 = AB2 +AC2 −1
2BC2 ;
(2) AA′2 =−−→AB ·
−−→AC +
1
4BC2.
Démonstration (1) On a : 2AA′2 =(−−→AB +
−−→BA′
)2+
(−−→AC +
−−→CA′
)2
=(−−→AB +
1
2
−−→BC
)2+
(−−→AC −
1
2
−−→BC
)2
= AB2 +1
4BC2 +−−→
BC ·−−→AB +AC2 +
1
4BC2 +−−→
BC ·−−→CA
= AB2 +AC2 +1
2BC2 +−−→
BC ·−−→CB
= AB2 +AC2 −1
2BC2
(2) En utilisant (1), il vient :1
2BC2 =
1
2
(−−→AC −−−→
AB)2
=1
2
(
AB2 +AC2 −2−−→AB ·
−−→AC
)
=1
2
(
2AA′2 +1
2BC2 −2
−−→AB ·
−−→AC
)
;
d’où l’on tire : AA′2 =−−→AB ·
−−→AC +
1
4BC2. ä
II.5 Polynômes du second degré
Un polynôme P de degré 2 défini par P(x) = ax2 +bx + c (avec a , 0), est aussi appelé trinôme du second degré.L’objectif de cette section est de savoir factoriser P(x), résoudre l’équation P(x) = 0, étudier le signe P(x) suivant lesvaleurs de x, représenter graphiquement P et trouver l’extremum de P.
II.5.1 Forme canonique
Pour factoriser un polynôme P, de la forme : P(x) = ax2 +bx + c ; on écrit P(x) sous forme canonique pour faireapparaître soit la différence de deux carrés (auquel cas P(x) est factorisable) soit la somme de deux carrés (auquel
cas P(x) n’est pas factorisable). La forme canonique de P(x) est : P(x) = a
[(
x +b
2a
)2
−b2 −4ac
4a2
]
. Pour obtenir cette
formule, on utilise la démarche explicitée dans le tableau ci-dessous.
1. Résoudre un triangle : étant donnés un certain nombre d’angles et de côtés d’un triangle, déterminer les angles et les côtés non donnés.
- série S

20 II. Révisions
étapes cas particulier cas général1. P(x) = 3x2 +5x −7
P(x) = 3
(
x2 +5
3x −
7
3
) P(x) = ax2 +bx +c
P(x) = a
(
x2 +b
ax +
c
a
)
2. P(x) = 3
(
x2 +25
6x +
(5
6
)2
−(
5
6
)2
−7
3
)
P(x) = 3
[(
x +5
6
)2
−(
5
6
)2
−7
3
]
P(x) = 3
[(
x +5
6
)2
−25
36−
84
36
]
P(x) = 3
[(
x +5
6
)2
−109
36
]
P(x) = a
(
x2 +2b
2ax +
(b
2a
)2
−(
b
2a
)2
+c
a
)
P(x) = a
[(
x −b
2a
)2
−(
b
2a
)2
+c
a
]
P(x) = a
[(
x −b
a
)2
−b2
4a2+
4ac
4a2
]
3. P(x) = 3
[(
x +5
6
)2
−( p
109
6
)2]
P(x) = 3
(
x +5
6−
p109
6
)(
x +5
6+
p109
6
)
P(x) = 3
(
x −−5+
p109
6
)(
x −−5−
p109
6
)
P(x) = a
[(
x +b
2a
)2
−b2 −4ac
4a2
]
Récapitulatif des étapes
1. On met, si besoin est, le coefficient dominant en facteur
2. On reconnaît la somme des termes de degrés 2 et 1 comme le début d’une identité remarquable.
3. Si l’expression entre crochets est la différence de deux quantités positives, alors on reconnaît la différence dedeux carrés et on factorise ; sinon, l’expression entre crochets est la somme de deux quantités positives et iln’existe pas de factorisation en produit de facteur de degré un à coefficient réels.
DÉFINITION II.5.1Le nombre, ∆, défini par : ∆= b2 −4ac ; est appelé discriminant de P.
La forme canonique de P devient alors :
P(x) = a
[(
x +b
2a
)2
−∆
4a2
]
(II.30)
II.5.2 Représentation graphique et sens de variation
Le plan est muni d’un repère (O;~ı ,~ ).D’après (II.30), pour tout réel x :
P(x) = a
(
x +b
2a
)2
−∆
4a(II.31)
Introduisons la fonction u : x 7→ ax2 et Cu sa représentation graphique. D’après (II.31) la courbe, P, de P est l’image
de Cu par la translation de vecteur ~v
−b
2a
−∆
4a
.
THÉORÈME II.5.1
La représentation graphique P de P(x) = ax2+bx+c (avec a , 0) est une parabole d’axe parallèle à Oy et de sommet
S
(
−b
2a,−
∆
4a
)
; de plus, dans le repère(
S ;~ı ,~)
, P a pour équation : Y = aX2.
Remarque D’après (II.31) on a : P
(
−b
2a
)
=−∆
4a; donc en pratique on obtient l’ordonnée de S en calculant P
(
−b
2a
)
.
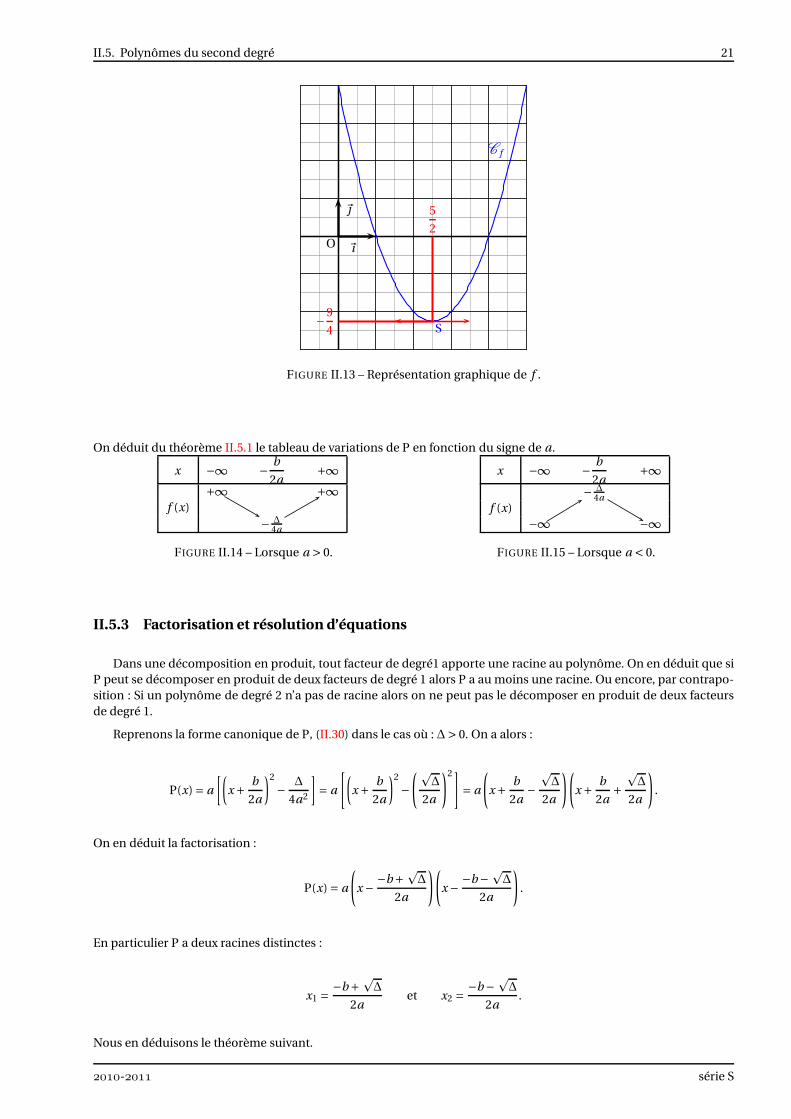
Exemple On se propose de représenter graphiquement la fonction f définie par : f (x) = x2 −5x +4.
On a : −b
2a=
5
2et f
(5
2
)
=25
4−
5
2+4 =
16
4−
25
4=−
9
4.
Introduisons le point S
(5
2;−
9
4
)
, dans le repère(
S ;~ı ,~)
, C f a pour équation : Y = X2.
Nous en déduisons la courbe de la figure II.13.
LYCÉE PONTUS DE TYARD Terminale VI
II.5. Polynômes du second degré 21
~ı
~
O
C f
5
2
−9
4 S
FIGURE II.13 – Représentation graphique de f .
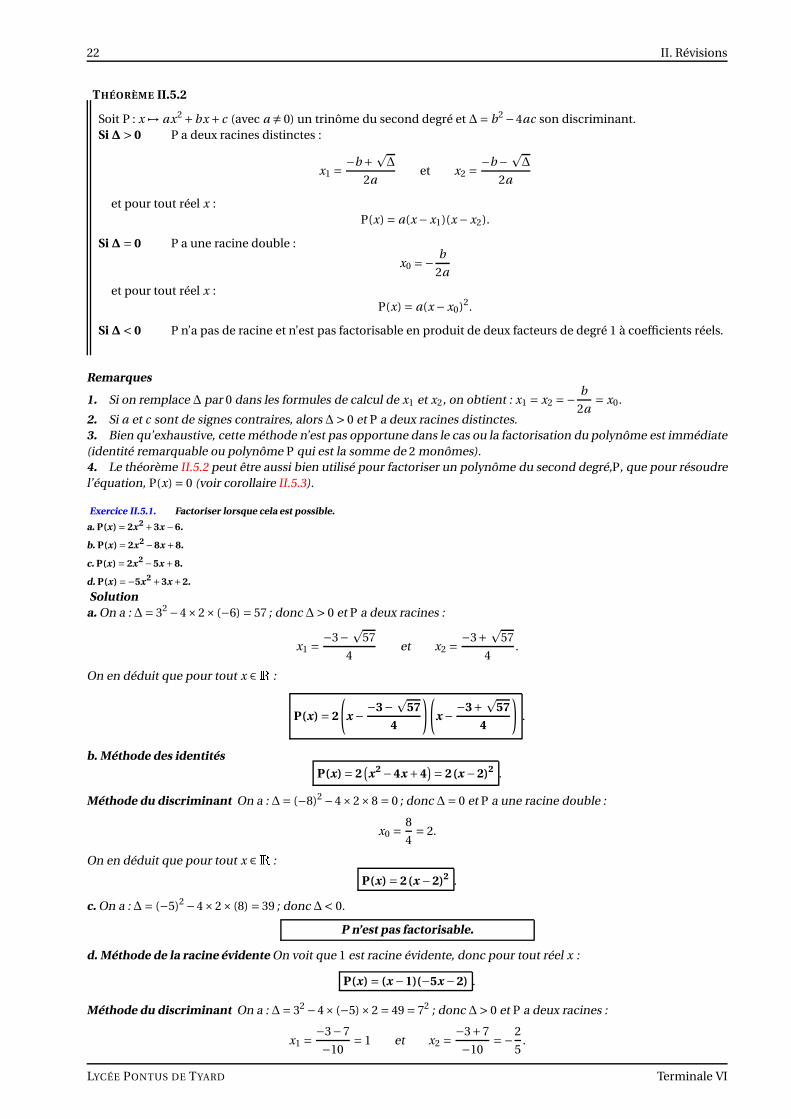
On déduit du théorème II.5.1 le tableau de variations de P en fonction du signe de a.
x −∞ −b
2a+∞
+∞ +∞f (x)
− ∆4a
FIGURE II.14 – Lorsque a > 0.
x −∞ −b
2a+∞
− ∆4a
f (x)−∞ −∞
FIGURE II.15 – Lorsque a < 0.
II.5.3 Factorisation et résolution d’équations
Dans une décomposition en produit, tout facteur de degré1 apporte une racine au polynôme. On en déduit que siP peut se décomposer en produit de deux facteurs de degré 1 alors P a au moins une racine. Ou encore, par contrapo-sition : Si un polynôme de degré 2 n’a pas de racine alors on ne peut pas le décomposer en produit de deux facteursde degré 1.
Reprenons la forme canonique de P, (II.30) dans le cas où : ∆> 0. On a alors :
P(x) = a
[(
x +b
2a
)2
−∆
4a2
]
= a
[(
x +b
2a
)2
−( p
∆
2a
)2]
= a
(
x +b
2a−
p∆
2a
)(
x +b
2a+
p∆
2a
)
.
On en déduit la factorisation :
P(x) = a
(
x −−b +
p∆
2a
)(
x −−b −
p∆
2a
)
.
En particulier P a deux racines distinctes :
x1 =−b +
p∆
2aet x2 =
−b −p∆
2a.
Nous en déduisons le théorème suivant.
- série S
22 II. Révisions
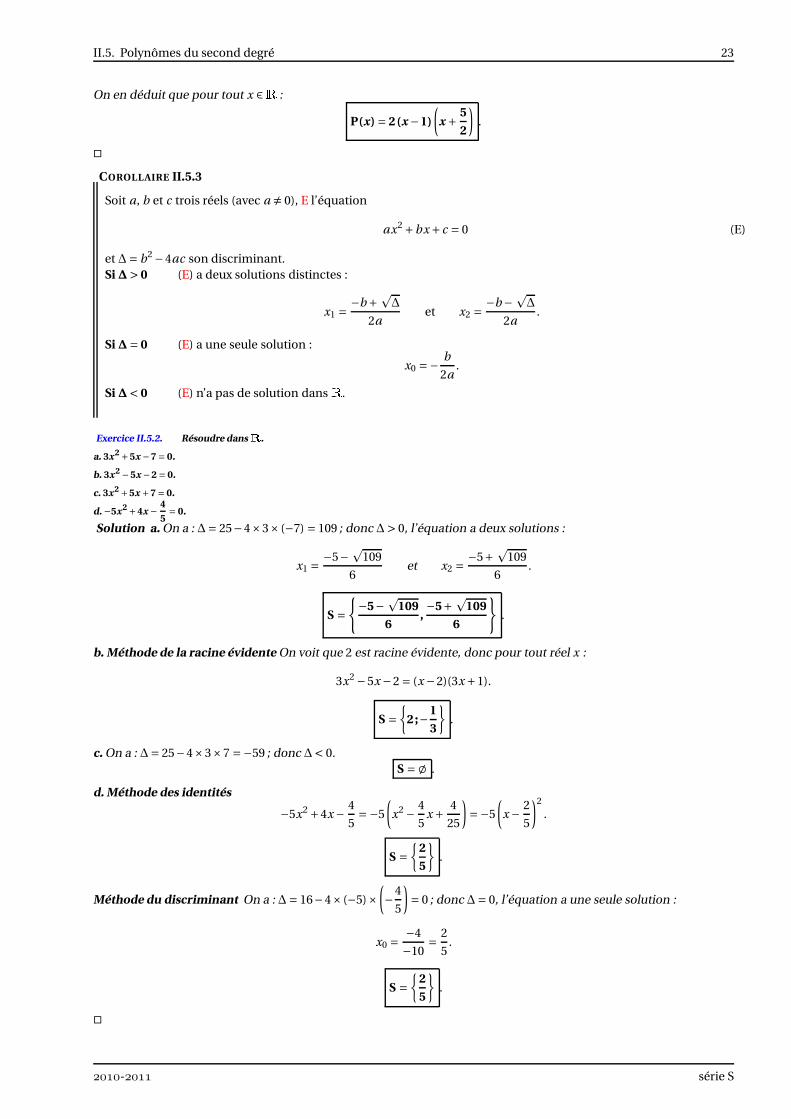
THÉORÈME II.5.2
Soit P : x 7→ ax2 +bx +c (avec a , 0) un trinôme du second degré et ∆= b2 −4ac son discriminant.Si ∆> 0 P a deux racines distinctes :
x1 =−b +
p∆
2aet x2 =
−b −p∆
2a
et pour tout réel x :P(x) = a(x − x1)(x − x2).
Si ∆= 0 P a une racine double :
x0 =−b
2a
et pour tout réel x :P(x) = a(x − x0)2.
Si ∆< 0 P n’a pas de racine et n’est pas factorisable en produit de deux facteurs de degré 1 à coefficients réels.
Remarques
1. Si on remplace ∆ par 0 dans les formules de calcul de x1 et x2, on obtient : x1 = x2 =−b
2a= x0.
2. Si a et c sont de signes contraires, alors ∆> 0 et P a deux racines distinctes.3. Bien qu’exhaustive, cette méthode n’est pas opportune dans le cas ou la factorisation du polynôme est immédiate(identité remarquable ou polynôme P qui est la somme de 2 monômes).4. Le théorème II.5.2 peut être aussi bien utilisé pour factoriser un polynôme du second degré,P, que pour résoudrel’équation, P(x) = 0 (voir corollaire II.5.3).
Exercice II.5.1. Factoriser lorsque cela est possible.
a. P(x) = 2x2 +3x −6.
b. P(x)= 2x2 −8x +8.
c. P(x) = 2x2 −5x +8.
d. P(x) =−5x2 +3x +2.
Solutiona. On a : ∆= 32 −4×2× (−6) = 57 ; donc ∆> 0 et P a deux racines :
x1 =−3−
p57
4et x2 =
−3+p
57
4.
On en déduit que pour tout x ∈R :
P(x) = 2
(
x −−3−
p57
4
)(
x −−3+
p57
4
)
.
b. Méthode des identitésP(x) = 2
(
x2 −4x +4)
= 2 (x −2)2 .
Méthode du discriminant On a : ∆= (−8)2 −4×2×8 = 0 ; donc ∆= 0 et P a une racine double :
x0 =8
4= 2.
On en déduit que pour tout x ∈R :
P(x) = 2 (x −2)2 .
c. On a : ∆= (−5)2 −4×2× (8) = 39 ; donc ∆< 0.
P n’est pas factorisable.
d. Méthode de la racine évidente On voit que 1 est racine évidente, donc pour tout réel x :
P(x) = (x −1)(−5x −2) .
Méthode du discriminant On a : ∆= 32 −4× (−5)×2 = 49 = 72 ; donc ∆> 0 et P a deux racines :
x1 =−3−7
−10= 1 et x2 =
−3+7
−10=−
2
5.
LYCÉE PONTUS DE TYARD Terminale VI
II.5. Polynômes du second degré 23
On en déduit que pour tout x ∈R :
P(x) = 2 (x −1)
(
x +5
2
)
.
COROLLAIRE II.5.3
Soit a, b et c trois réels (avec a , 0), E l’équation
ax2 +bx +c = 0 (E)
et ∆= b2 −4ac son discriminant.Si ∆> 0 (E) a deux solutions distinctes :
x1 =−b +
p∆
2aet x2 =
−b −p∆
2a.
Si ∆= 0 (E) a une seule solution :
x0 =−b
2a.
Si ∆< 0 (E) n’a pas de solution dansR.
Exercice II.5.2. Résoudre dansR.
a. 3x2 +5x −7 = 0.
b. 3x2 −5x −2 = 0.
c. 3x2 +5x +7 = 0.
d. −5x2 +4x −4
5= 0.
Solution a. On a : ∆= 25−4×3× (−7) = 109 ; donc ∆> 0, l’équation a deux solutions :
x1 =−5−
p109
6et x2 =
−5+p
109
6.
S =
−5−p
109
6,−5+
p109
6
.
b. Méthode de la racine évidente On voit que 2 est racine évidente, donc pour tout réel x :
3x2 −5x −2 = (x −2)(3x +1).
S =
2 ;−1
3
.
c. On a : ∆= 25−4×3×7 =−59 ; donc ∆< 0.S =; .
d. Méthode des identités
−5x2 +4x −4
5=−5
(
x2 −4
5x +
4
25
)
=−5
(
x −2
5
)2
.
S =
2
5
.
Méthode du discriminant On a : ∆= 16−4× (−5)×(
−4
5
)
= 0 ; donc ∆= 0, l’équation a une seule solution :
x0 =−4
−10=
2
5.
S =
2
5
.
- série S
24 II. Révisions
II.5.4 Signe d’un trinôme
On se propose de déterminer le signe de P(x) = ax2 +bx + c en fonction de x. On a vu en II.5.3 que lorsque ∆> 0,on a la factorisation :
P(x) = a (x − x1) (x − x2) .
Donc en supposant que x1 < x2, on en déduit le tableau suivant :
x x1 x2
a signe de a
x − x1 − 0 + +x − x2 − − 0 +P(x) signe de a 0 signe de −a 0 signe de a
Lorsque ∆< 0, d’après (II.30) : P(x) = a
[(
x +b
2a
)2
−∆
4a2
]
︸ ︷︷ ︸
strictement positif
; donc P est du signe de a.
Nous en déduisons le théorème suivant.
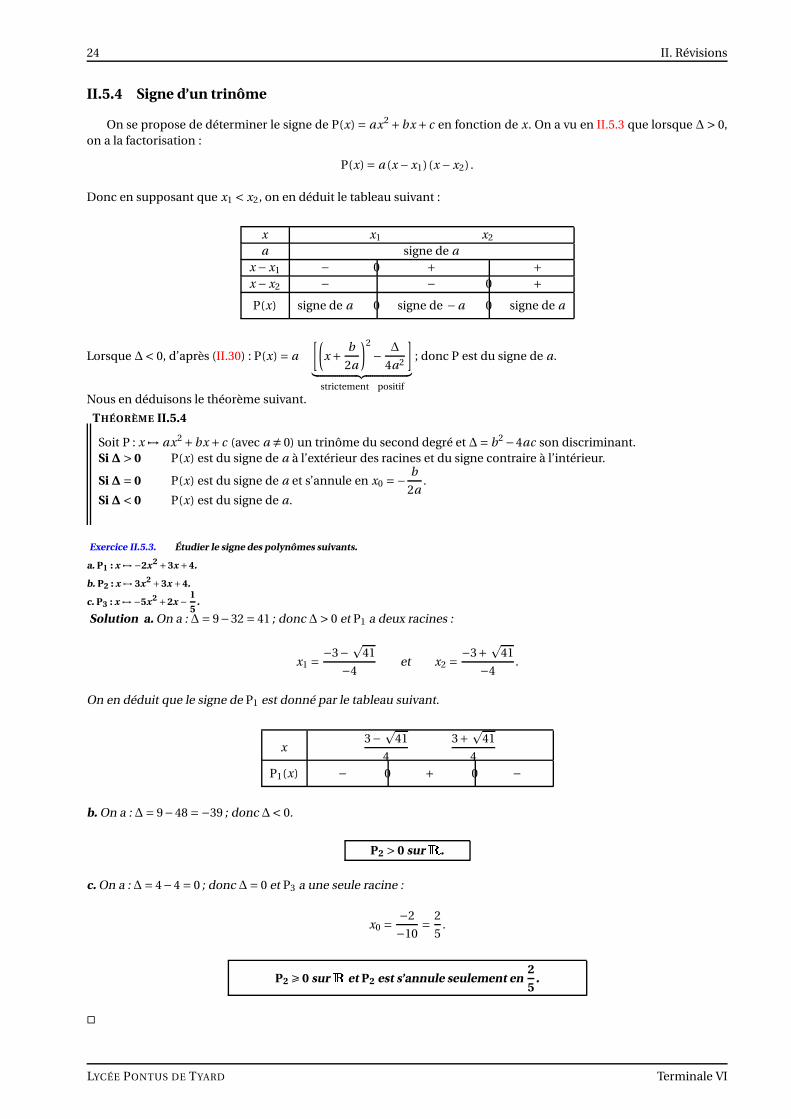
THÉORÈME II.5.4
Soit P : x 7→ ax2 +bx +c (avec a , 0) un trinôme du second degré et ∆= b2 −4ac son discriminant.Si ∆> 0 P(x) est du signe de a à l’extérieur des racines et du signe contraire à l’intérieur.
Si ∆= 0 P(x) est du signe de a et s’annule en x0 =−b
2a.
Si ∆< 0 P(x) est du signe de a.
Exercice II.5.3. Étudier le signe des polynômes suivants.
a. P1 : x 7→−2x2 +3x +4.
b. P2 : x 7→ 3x2 +3x +4.
c. P3 : x 7→−5x2 +2x −1
5.
Solution a. On a : ∆= 9−32 = 41 ; donc ∆> 0 et P1 a deux racines :
x1 =−3−
p41
−4et x2 =
−3+p
41
−4.
On en déduit que le signe de P1 est donné par le tableau suivant.
x3−
p41
4
3+p
41
4P1(x) − 0 + 0 −
b. On a : ∆= 9−48 =−39 ; donc ∆< 0.
P2 > 0 surR.
c. On a : ∆= 4−4 = 0 ; donc ∆= 0 et P3 a une seule racine :
x0 =−2
−10=
2
5.
P2 Ê 0 surR et P2 est s’annule seulement en2
5.
LYCÉE PONTUS DE TYARD Terminale VI
II.5. Polynômes du second degré 25
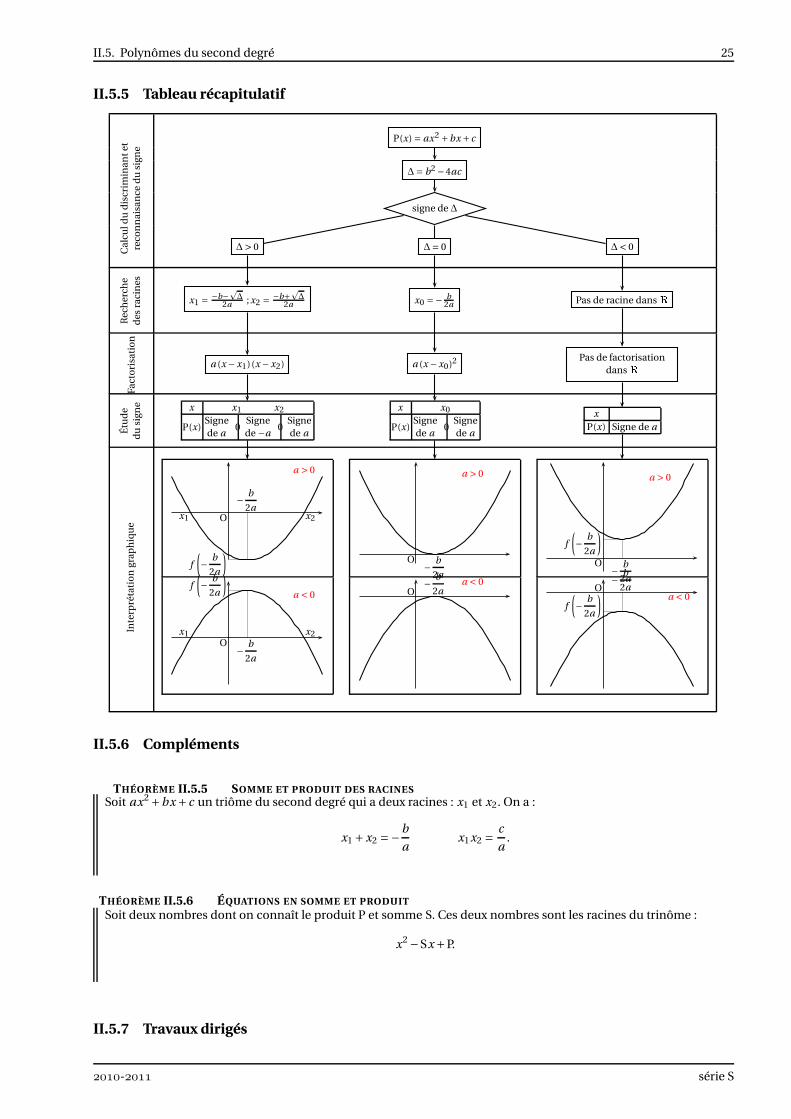
II.5.5 Tableau récapitulatif
Cal
culd
ud
iscr
imin
ante
tre
con
nai
san
ced
usi
gne
P(x) = ax2 +bx +c
∆= b2 −4ac
signe de ∆
∆> 0 ∆= 0 ∆< 0
Rec
her
che
des
raci
nes
x1 = −b−p∆
2a ;x2 = −b+p∆
2a x0 =− b2a Pas de racine dansR
Fact
ori
sati
on
a (x −x1)(x −x2) a (x −x0)2 Pas de factorisationdansR
Étu
de
du
sign
e x x1 x2
P(x)Signede a
0Signede −a
0Signede a
x x0
P(x)Signede a
0Signede a
x
P(x) Signe de a
Inte
rpré
tati
on
grap
hiq
ue
Ox1 x2
−b
2a
a > 0
f
(
−b
2a
)
Ox1 x2
−b
2a
a < 0f
(
−b
2a
)
O−
b
2a
a > 0
O−
b
2aa < 0
O−
b
2a
a > 0
f
(
−b
2a
)
O−
b
2aa < 0
f
(
−b
2a
)
II.5.6 Compléments
THÉORÈME II.5.5 SOMME ET PRODUIT DES RACINESSoit ax2 +bx +c un triôme du second degré qui a deux racines : x1 et x2. On a :
x1 + x2 =−b
ax1x2 =
c
a.
THÉORÈME II.5.6 ÉQUATIONS EN SOMME ET PRODUIT
Soit deux nombres dont on connaît le produit P et somme S. Ces deux nombres sont les racines du trinôme :
x2 −Sx +P.
II.5.7 Travaux dirigés
- série S

26 II. Révisions
II.5.7.a Factorisation d’expressions bicarrées
Les trinômes bicarrés sont les trinômes de la forme P : x 7→ ax4 +bx2 +c.L’objectif de ce travail dirigé est de dégagé à travers quelques exemples une méthode générale permettant de décom-poser n’importe quel trinôme bicarré en produit de deux facteurs de degré 2.
Partie A – avec le discriminant
Factoriser (lorsque c’est possible) les polynômes suivants en utilisant la méthode du discriminant (on pourra poser :
X = x2).
1. P1 : x 7→ 2x4 +3x2 −1.
2. P2 : x 7→ x4 + x2 +1.
3. P3 : x 7→ 6x4 −5x2 −6.
4. P4 : x 7→ x4 +16.
5. P5 : x 7→ 2x4 −7x2 +6.
6. P6 : x 7→ 2x4 − x2 +8.
Partie B – sans le discriminant
On constate que certains polynômes considérés ci-dessus ont un discriminant strictement négatif et ne sont donc pasfactorisables par la méthode du discriminant. On se rappelle alors que cette méthode découle de la forme canoniqueque nous avions obtenue en factorisant par le coefficient dominant puis en considérant les deux premiers termes dufacteur de degré 2 comme le début d’un carré. L’idée est alors, non pas de considérer les deux premiers termes dufacteur de degré 2 comme le début d’un carré, mais de considérer les termes extrêmes du facteur de degré 2 commeles termes extrêmes d’un carré.Factoriser les polynômes qui ne l’ont pas été dans la partie A.
II.5.7.b Équations en somme et produit
1. Soit P : x 7→ ax2 +bx +c un trinôme du second degré dont le discriminant est strictement positif.Exprimer en fonction de a, b et c la somme et produit des racines.
2. Soit α et β deux nombres dont on connaît la somme, s et le produit, p.Démontrer que α et β sont les racines du polynôme : P : x 7→ x2 − sx +p.
3. Un rectangle a pour périmètre 24 et pour aire 35, déterminer ses dimensions.
4. Résoudre dansR2 le système suivant :
x + y = 4x y = 1
5. Résoudre dansR2 le système suivant :
x2 + y2 = 25x y =−12
II.5.8 Exercices
Le plan est muni d’un repère orthonormé (O;~ı ,~ ) (unitégraphique : 1 cm).
II.5.a. Écrire P : x 7→ x2 −2x +2 sous forme canonique.
II.5.b. Écrire Q : x 7→ 4x2 −2x +2 sous forme canonique.
II.5.c. Écrire R : x 7→ −5x2+10x+2 sous forme canonique.
II.5.d. Tracer la courbe P d’équation y = x2 −2x +2.
II.5.e. Tracer la courbe P d’équation y =−3x2 −12x −4.
II.6 Exercices résolus
Exercice II.6.1. Le plan est muni d’un repère orthonormé (O ;~ı ,~ ) (unité graphique : 1 cm).
Représenter graphiquement la fonction f : x 7→2x +1
x +1.
Solution L’ensemble de définition de f est Df =R\ −1. On a :
2x +1 x +1−1 2
LYCÉE PONTUS DE TYARD Terminale VI
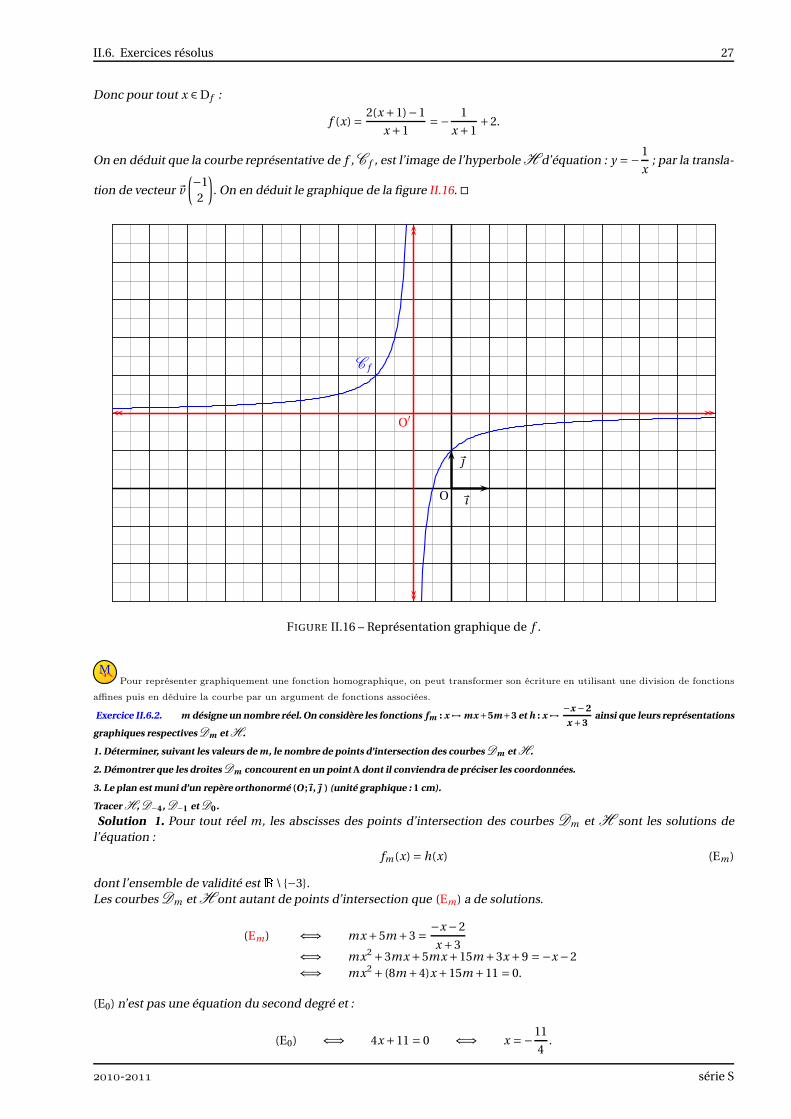
II.6. Exercices résolus 27
Donc pour tout x ∈ Df :
f (x) =2(x +1)−1
x +1=−
1
x +1+2.
On en déduit que la courbe représentative de f , C f , est l’image de l’hyperbole H d’équation : y =−1
x; par la transla-
tion de vecteur ~v
(−12
)
. On en déduit le graphique de la figure II.16.
~ı
~
O
C f
O′
FIGURE II.16 – Représentation graphique de f .
MMPour représenter graphiquement une fonction homographique, on peut transformer son écriture en utilisant une division de fonctions
affines puis en déduire la courbe par un argument de fonctions associées.
Exercice II.6.2. m désigne un nombre réel. On considère les fonctions fm : x 7→ mx+5m+3 et h : x 7→−x −2
x +3ainsi que leurs représentations
graphiques respectives Dm et H.
1. Déterminer, suivant les valeurs de m, le nombre de points d’intersection des courbes Dm et H.
2. Démontrer que les droites Dm concourent en un point A dont il conviendra de préciser les coordonnées.
3. Le plan est muni d’un repère orthonormé (O ;~ı ,~ ) (unité graphique : 1 cm).
Tracer H, D−4, D−1 et D0.
Solution 1. Pour tout réel m, les abscisses des points d’intersection des courbes Dm et H sont les solutions del’équation :
fm (x) = h(x) (Em)
dont l’ensemble de validité estR\ −3.Les courbes Dm et H ont autant de points d’intersection que (Em) a de solutions.
(Em) ⇐⇒ mx +5m +3 =−x −2
x +3⇐⇒ mx2 +3mx +5mx +15m +3x +9 =−x −2⇐⇒ mx2 + (8m +4)x +15m +11 = 0.
(E0) n’est pas une équation du second degré et :
(E0) ⇐⇒ 4x +11 = 0 ⇐⇒ x =−11
4.
- série S
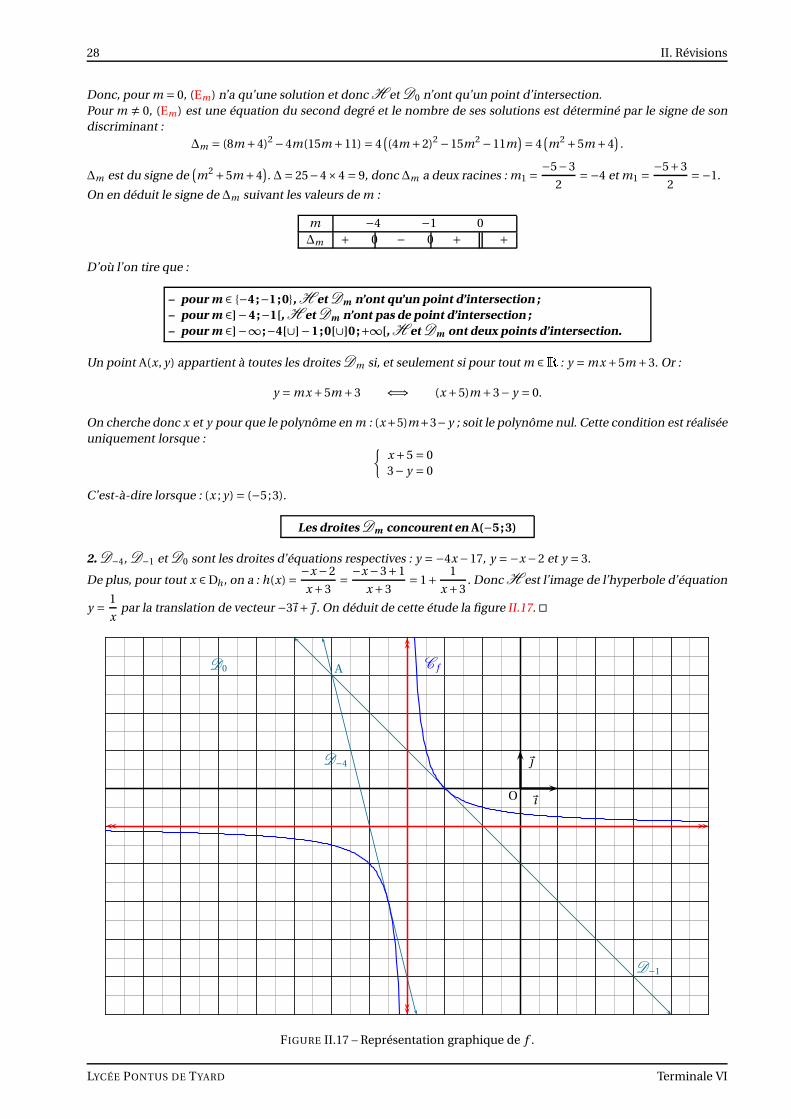
28 II. Révisions
Donc, pour m = 0, (Em) n’a qu’une solution et donc H et D0 n’ont qu’un point d’intersection.Pour m , 0, (Em) est une équation du second degré et le nombre de ses solutions est déterminé par le signe de sondiscriminant :
∆m = (8m +4)2 −4m(15m +11) = 4(
(4m +2)2 −15m2 −11m)
= 4(
m2 +5m +4)
.
∆m est du signe de(
m2 +5m +4)
. ∆= 25−4×4 = 9, donc ∆m a deux racines : m1 =−5−3
2=−4 et m1 =
−5+3
2=−1.
On en déduit le signe de ∆m suivant les valeurs de m :
m −4 −1 0∆m + 0 − 0 + +
D’où l’on tire que :
– pour m ∈ −4 ;−1 ;0, H et Dm n’ont qu’un point d’intersection ;– pour m ∈]−4 ;−1[, H et Dm n’ont pas de point d’intersection ;– pour m ∈]−∞ ;−4[∪]−1 ;0[∪]0 ;+∞[, H et Dm ont deux points d’intersection.
Un point A(x, y) appartient à toutes les droites Dm si, et seulement si pour tout m ∈R : y = mx +5m +3. Or :
y = mx +5m +3 ⇐⇒ (x +5)m +3− y = 0.
On cherche donc x et y pour que le polynôme en m : (x+5)m+3−y ; soit le polynôme nul. Cette condition est réaliséeuniquement lorsque :
x +5 = 03− y = 0
C’est-à-dire lorsque : (x ; y) = (−5;3).
Les droites Dm concourent en A(−5 ;3)
2. D−4, D−1 et D0 sont les droites d’équations respectives : y =−4x −17, y =−x −2 et y = 3.
De plus, pour tout x ∈Dh , on a : h(x) =−x −2
x +3=
−x −3+1
x +3= 1+
1
x +3. Donc H est l’image de l’hyperbole d’équation
y =1
xpar la translation de vecteur −3~ı +~ . On déduit de cette étude la figure II.17.
~ı
~
O
C fAD0
D−4
D−1
FIGURE II.17 – Représentation graphique de f .
LYCÉE PONTUS DE TYARD Terminale VI
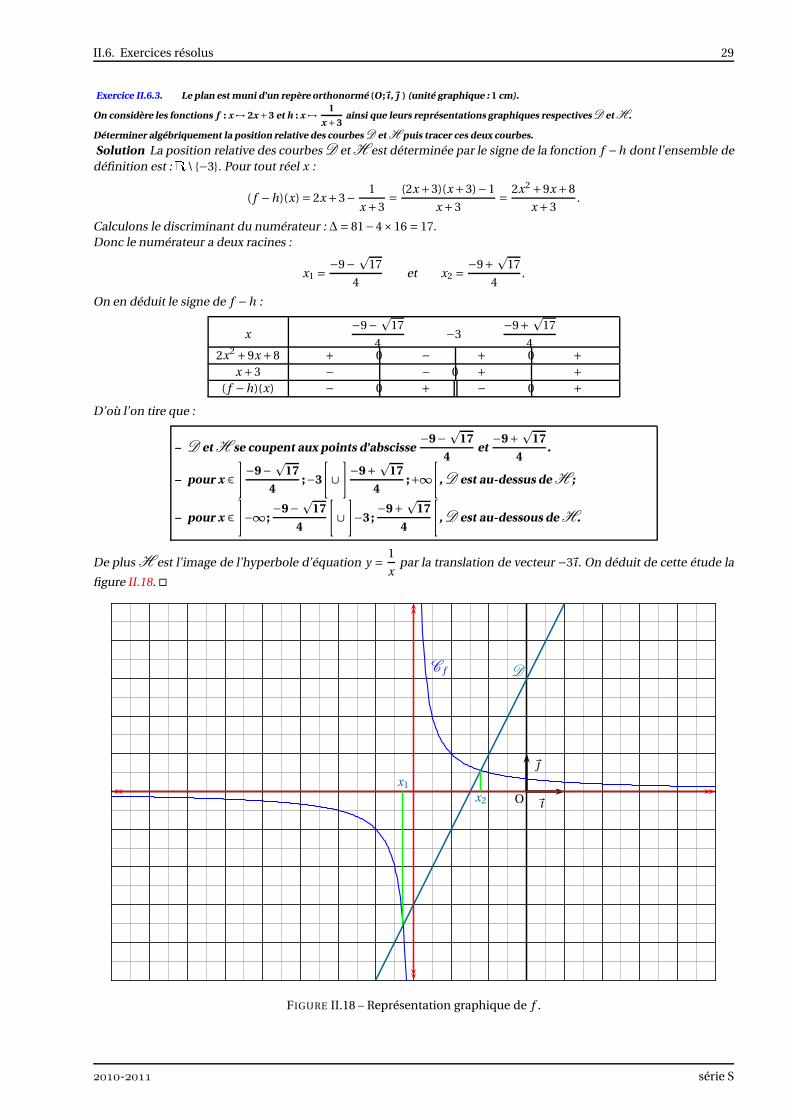
II.6. Exercices résolus 29
Exercice II.6.3. Le plan est muni d’un repère orthonormé (O ;~ı ,~ ) (unité graphique : 1 cm).
On considère les fonctions f : x 7→ 2x +3 et h : x 7→1
x +3ainsi que leurs représentations graphiques respectives D et H.
Déterminer algébriquement la position relative des courbes D et H puis tracer ces deux courbes.
Solution La position relative des courbes D et H est déterminée par le signe de la fonction f −h dont l’ensemble dedéfinition est :R\ −3. Pour tout réel x :
( f −h)(x) = 2x +3−1
x +3=
(2x +3)(x +3)−1
x +3=
2x2 +9x +8
x +3.
Calculons le discriminant du numérateur : ∆= 81−4×16 = 17.Donc le numérateur a deux racines :
x1 =−9−
p17
4et x2 =
−9+p
17
4.
On en déduit le signe de f −h :
x−9−
p17
4−3
−9+p
17
42x2 +9x +8 + 0 − + 0 +
x +3 − − 0 + +( f −h)(x) − 0 + − 0 +
D’où l’on tire que :
– D et H se coupent aux points d’abscisse−9−
p17
4et
−9+p
17
4.
– pour x ∈]
−9−p
17
4;−3
[
∪]
−9+p
17
4;+∞
[
, D est au-dessus de H ;
– pour x ∈]
−∞ ;−9−
p17
4
[
∪]
−3 ;−9+
p17
4
[
, D est au-dessous de H.
De plus H est l’image de l’hyperbole d’équation y =1
xpar la translation de vecteur −3~ı. On déduit de cette étude la
figure II.18.
~ı
~
O
C f
x2
x1
D
FIGURE II.18 – Représentation graphique de f .
- série S

30 II. Révisions
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre III
Suites numériques
III.1 Vocabulaire de l’ordre dans IR
III.1.1 Majorants, minorants . . .
Considérons une partie E deR, par exemple : E=]−3;0]∪ 2 ;On a pour tout x ∈ E : 2,5 Ê x ; on dit que 2,5 est majorant de E. Tout nombre plus grand que 2,5 est également unmajorant de E. L’ensemble des majorants de E est l’intervalle [2;+∞[.
On a pour tout x ∈ E : −4 É x ; on dit que −4 est minorant de E. Tout nombre plus petit que −4 est également unminorant de E. L’ensemble des minorants de E est l’intervalle ]−∞ ;−3].
E a un plus grand élément, 2, mais n’a pas de plus petit élément.Un ensemble qui a des majorants (respectivement des minorants) est dit majoré (respectivement minoré). Un
ensemble à la fois minoré et majoré est dit borné. Certaines parties deR, commeN, ne sont pas bornées.Le plus petit élément (s’il existe) de l’ensemble des majorants (respectivement minorants) est appelé borne supé-
rieure (respectivement borne inférieure). Par exemple la borne supérieure de E est 2 et sa borne inférieure est −3.THÉORÈME III.1.1
Une partie E deR est bornée si et seulement si il existe un nombre réel A tel que pour tout élément x de A : |x| É A
Démonstration Pour tous nombres réels x et A :|x| ÉA ⇐⇒ −A É x ÉA.
Soit E une partie deR.S’il existe un nombre réel A tel que pour tout élément x de E : |x| ÉA ; alors −A est minorant de E et A est un majorant de E ; on en déduit que E
est borné.
Réciproquement, si E est borné. Soit m un minorant de E et M un majorant de E. Posons : A = max−m,M.
On a : −m É A et M ÉA ; donc : −A Ém et M É A ; or pour tout élément x de E : m É x ÉM ; donc par transitivité : −A É x É A.
Soit finalement, pour tout élément x de E : |x| ÉA. ä
III.1.2 Théorème de la borne supérieure (complément)
Ce paragraphe est hors programme, il peut ne pas être lu et est destiné aux élèves désireux d’en savoir plus.Soit maintenant une partie majorée non vide E quelconque. Les considérations envisagées ci-dessus laissent supposerque l’ensemble des majorants de E est un intervalle qui serait donc de la forme [a ;+∞[ ou ]a ;+∞[ (a ∈R). Mais si a
n’était pas un majorant de E, alors il existerait un élément x de E tel que : a < x.On se trouverait alors dans la situation contradictoire suivante :a + x
2est un majorant de E (car
a + x
2∈]a ;+∞[) et
a + x
2n’est pas un majorant de E (car
a + x
2< x).
On en déduit que a est le plus petit des majorants de E et donc la borne supérieure de E.Cette étude nous conduit à énoncer le théorème suivant que nous admettons.
THÉORÈME III.1.2 THÉORÈME DE LA BORNE SUPÉRIEURE
Toute partie majorée (respectivement minorée) non vide deR a une borne supérieure (respectivement inférieure).
Remarque Ce théorème est faux dansQ.
Exemple DansQ l’ensembleE =
x ∈Q∣∣x2 < 2
est majoré par3
2mais n’a pas de borne supérieure ; alors que dansR il a une borne supérieure :
p2.
31

32 III. Suites numériques
III.2 Définitions
III.2.1 Introduction
DÉFINITION III.2.1 SUITE NUMÉRIQUE
Une suite numérique est une fonction d’une partie deN dans un ensemble de nombres (généralementR).
Exemples1. On peut considérer la suite (un )n∈N définie par : un = n2.On a alors : u0 = 0 ; u1 = 1 ; u2 = 4 ; u3 = 9 ; u4 = 16 . . .Pour chaque terme un on a : un = f (n) ; où f est la fonction x 7→ x2.On dit que la suite (un) est définie explicitement.On peut calculer directement des termes de « grands indices » (u100 = 10000).
2. On peut considérer la suite (vn)nÊ2 définie par :
v2 =1
2vn+1 = v2
n
.
On a alors : v2 =1
2; v3 =
1
4; v4 =
1
16· · ·
v0 et v1 ne sont pas définis.Pour chaque terme on a : vn+1 = f (vn) ; où f est la fonction x 7→ x2.On dit que la suite (vn) est définie par récurrence .Pour calculer un terme il faut connaître les termes précédents.
La suite (vn) peut cependant être définie explicitement, pour tout entier naturel n Ê 2 : vn =1
2(2n−2).
3. On peut également considérer la suite (wn)n∈N définie par :
w0 = w1 = 1wn+1 = wn+1 +wn −n
.
Déterminer les cinq premiers termes de cette suite.
Remarque Toutes les suites étudiées en classe de Première et de Terminale seront définies sur N ou à partir d’uncertain indice.
III.2.2 Composée d’une suite par une fonction
DÉFINITION III.2.2Soit f une fonction et (vn) une suite d’éléments de l’ensemble de définition de f .La composée de (vn) par f est la suite (un ) de terme général : un = f (vn).
Exemple Si (vn)n∈N et f sont définies par : vn = n2 et f (x) = 2x −3 ; alors (un)n∈N est définie par : un = 2n2 −3.
III.2.3 Exercices
III.2.a. Calculer les cinq premiers termes de la suite(un )n∈N définie par : un = 4n2 −n+1.
III.2.b. Calculer les cinq premiers termes de la suite(un )n∈N définie par : u0 = 0 et pour tout n ∈N⋆ ;
un = u2n−1 +1.
III.2.c. Calculer les cinq premiers termes de la suite(vn)n∈N, composée de la suite (un ) de l’exercice précé-dent par la fonction f : x 7→ x2 −1.
III.3 Représentation graphique d’une suite
III.3.1 Représentation graphique d’une suite définie explicitement
Pour représenter graphiquement une suite définie explicitement (par une relation du type un = f (n)), il suffit dereprésenter graphiquement la fonction f sur la partie positive de son ensemble de définition.
LYCÉE PONTUS DE TYARD Terminale VI
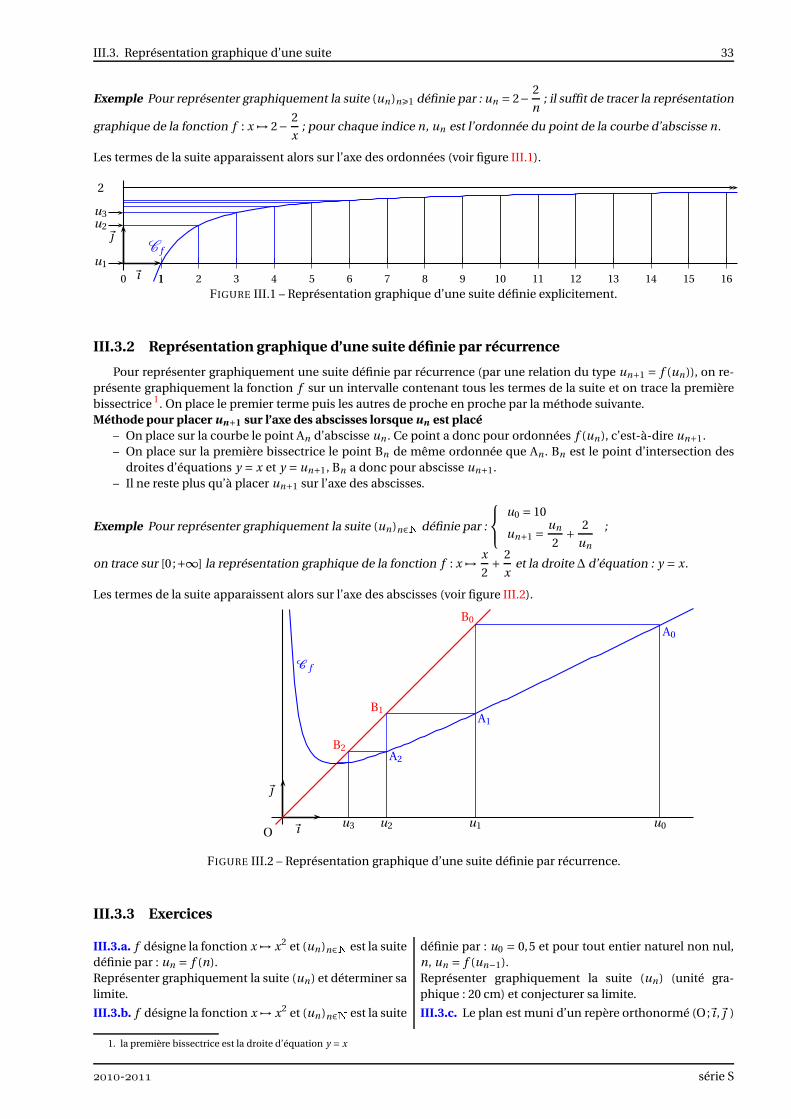
III.3. Représentation graphique d’une suite 33
Exemple Pour représenter graphiquement la suite (un )nÊ1 définie par : un = 2−2
n; il suffit de tracer la représentation
graphique de la fonction f : x 7→ 2−2
x; pour chaque indice n, un est l’ordonnée du point de la courbe d’abscisse n.
Les termes de la suite apparaissent alors sur l’axe des ordonnées (voir figure III.1).
~ı
~C f
2
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 161
u1
u2
u3
FIGURE III.1 – Représentation graphique d’une suite définie explicitement.
III.3.2 Représentation graphique d’une suite définie par récurrence
Pour représenter graphiquement une suite définie par récurrence (par une relation du type un+1 = f (un )), on re-présente graphiquement la fonction f sur un intervalle contenant tous les termes de la suite et on trace la premièrebissectrice 1. On place le premier terme puis les autres de proche en proche par la méthode suivante.Méthode pour placer un+1 sur l’axe des abscisses lorsque un est placé
– On place sur la courbe le point An d’abscisse un . Ce point a donc pour ordonnées f (un ), c’est-à-dire un+1.– On place sur la première bissectrice le point Bn de même ordonnée que An . Bn est le point d’intersection des
droites d’équations y = x et y = un+1, Bn a donc pour abscisse un+1.– Il ne reste plus qu’à placer un+1 sur l’axe des abscisses.
Exemple Pour représenter graphiquement la suite (un)n∈N définie par :
u0 = 10
un+1 =un
2+
2
un
;
on trace sur [0;+∞] la représentation graphique de la fonction f : x 7→x
2+
2
xet la droite ∆ d’équation : y = x.
Les termes de la suite apparaissent alors sur l’axe des abscisses (voir figure III.2).
~ı
~
O
C f
u0u1u2u3
A0
A1
A2
B0
B1
B2
FIGURE III.2 – Représentation graphique d’une suite définie par récurrence.
III.3.3 Exercices
III.3.a. f désigne la fonction x 7→ x2 et (un )n∈N est la suitedéfinie par : un = f (n).Représenter graphiquement la suite (un ) et déterminer salimite.
III.3.b. f désigne la fonction x 7→ x2 et (un )n∈N est la suite
définie par : u0 = 0,5 et pour tout entier naturel non nul,n, un = f (un−1).Représenter graphiquement la suite (un ) (unité gra-phique : 20 cm) et conjecturer sa limite.
III.3.c. Le plan est muni d’un repère orthonormé (O;~ı ,~ )
1. la première bissectrice est la droite d’équation y = x
- série S

34 III. Suites numériques
(unité graphique : 2cm). f est la fonction : x 7→ 3 −2
x.
C f est la représentation graphique de f . (un) est la suitevérifiant, u0 = 5, et pour tout entier naturel non nul, n :un = f (un−1).
1. Déterminer les éventuelles asymptotes de C f .
2. Déterminer les points fixes 2 de f .
3. Représenter graphiquement les cinq premiers termesde la suite (un) puis conjecturer sa limite éventuelle.
III.4 Suites bornées
III.4.1 Généralités
DÉFINITIONS III.4.1 SUITE BORNÉE
(1) Dire qu’une suite est majorée (respectivement minorée) signifie que l’ensemble des termes de cette suite estmajoré (respectivement minoré).(2) Une suite à la fois majorée et minoré est dite bornée.
Exemple Considérons la suite (un )n∈N définie par : un = 2sin n+1.Soit n un entier naturel. La fonction f : x 7→ 2x+1 est croissante surR (fonction affine de coefficient dominant positif)et on sait que : −1 É sin n É 1 ; donc : f (−1) É f (sin n) É f (1) ; c’est-à-dire : −1 É un É 3. La suite (un ) est donc majoréepar 3 et minorée par −1
Notations et vocabulaire1. Lorsqu’une suite (un ) est majorée, par abus de langage nous appellerons borne supérieure de (un ) la borne supé-rieure de l’ensemble de ces termes.2. On défini de même la borne inférieure d’une suite minorée.
Exercice III.4.1. On considère la suite (un )nÊ1 définie par :
un =n∑
i=1
1
n + i.
1. Calculer les trois premiers termes de cette suite.
2. Démontrer que la suite (un ) est minorée par1
2et majorée par 1.
Solution 1. On a :
u1 =1∑
i=1
1
1+ i=
1
2u2 =
2∑
i=1
1
1+ i=
1
2+1+
1
2+2=
7
12u3 =
3∑
i=1
1
3+ i=
1
3+1+
1
3+2+
1
3+3=
37
60
2. Soit n un entier naturel non nul. un est une somme de n termes, elle donc minorée par n fois le plus petit et majoréepar n fois le plus grand. Donc :
n×1
n+nÉ un É n×
1
n+1.
Or : n×1
n+n=
1
2et n×
1
n+1=
n
n+1; donc : n×
1
n+1É 1 (car
n
n+1est un quotient de deux nombres réels strictement
positifs et numérateur est inférieur au dénominateur). Donc :
1
2É un É 1.
La suite (un ) est minorée par1
2et majorée par 1.
III.4.2 Exercices
III.4.a. Démontrer que la suite (un )nÊ0, de terme général
un =1
2+ sin n, est bornée et préciser un majorant et un
minorant.
III.4.b. Démontrer que la suite (un )nÊ0, de terme général
un =(
1
2+ sin n
)2
, est bornée et préciser un majorant et un
minorant.
2. Les points fixes de f sont les solutions de l’équation : f (x) = x.
LYCÉE PONTUS DE TYARD Terminale VI

III.5. Suites monotones 35
III.4.c. Démontrer que la suite (un )n>0, de terme général un =n∑
k=1
1
2n+k, est bornée et préciser un majorant et un
minorant.
III.5 Suites monotones
III.5.1 Définitions
DÉFINITIONS III.5.1 SUITE MONOTONE
(1) Dire qu’une suite est croissante (respectivement décroissante) signifie que cette suite est une fonction crois-sante (respectivement décroissante).(2) Les suites croissantes et les suites décroissantes sont dites monotones.
Soit (un )nÊn0 une suite. Dire que (un ) est croissante signifie que pour tous entiers p et q supérieurs ou égaux à n0 :
p É q =⇒ up É uq .
Remarques1. On définit de même les suites strictement monotones.2. Toute suite croissante est minorée par son premier terme3. Toute suite décroissante est majorée par son premier terme
DÉFINITIONS III.5.2
Soit (un )nÊn0 une suite.
(1) La suite (un) est dite constante lorsque pour tout nombre entier, n, supérieur ou égal à n0 : un = un0 .
(2) La suite (un) est dite stationnaire lorsqu’il existe un nombre entier, p, tel que pour tout nombre entier, n,supérieur ou égal à p : un = up .
Remarques1. Les suites constantes sont les suites à la fois croissantes et décroissantes.2. Les suites stationnaires sont les suites constantes à partir d’un certain indice.3. Les suites constantes sont des cas particuliers de suites stationnaires.
III.5.2 Méthodes d’étude du sens de variation d’une suite
III.5.2.a Cas général
THÉORÈME III.5.1Soit (un )nÊn0 une suite numérique.(1) Si pour tout entier n Ê n0, on a : un+1 −un Ê 0 ; alors la suite (un ) est croissante.(2) Si pour tout entier n Ê n0, on a : un+1 −un É 0 ; alors la suite (un ) est décroissante.
Démonstration Démontrons (1). Soit p et q deux entiers tels que : no É p É q. On a :
up É up+1 É ··· É uq−1 É uq
donc la suite (un ) est croissante. On démontre de même (2). äExercice III.5.1. Étudier le sens de variation de la suite (un )n∈N⋆ définie par : un =
1
n.
Solution Soit n un entier naturel non nul. On a :
un+1 −un =1
n+1−
1
n=
n− (n+1)
n(n+1)=−
1
n(n+1)
or n et n+1 sont tous deux strictement positifs donc pour tout entier naturel non nul n on a : −1
n(n+1)< 0 ;
c’est-à-dire : un+1 −un É 0.La suite (un) est donc décroissante.
- série S

36 III. Suites numériques
III.5.2.b Lorsque tous les termes de la suite sont strictement positifs
THÉORÈME III.5.2Soit (un)nÊn0 une suite dont tous les termes sont strictement positifs.
(1) Si pour tout entier n Ê n0, on a :un+1
unÊ 1 ; alors la suite (un) est croissante.
(2) Si pour tout entier n Ê n0, on a :un+1
unÉ 1 ; alors la suite (un) est décroissante.
Démonstration Ce théorème se déduit du précédent car les termes de la suite étant strictement positifs, on a :un+1
unÊ 1 =⇒ un+1 Êun et
un+1
unÉ 1 =⇒ un+1 É un . ä
Exercice III.5.2. Étudier le sens de variation de la suite (un )n∈N⋆ définie par : un =1
n.
Solution Tous les termes de cette suite sont strictement positifs. Soit n un entier naturel non nul.
un+1
un=
1
n+11
n
=n
n+1=
n+1−1
n+1= 1−
1
n+1.
Donc :un+1
unÉ 1. La suite (un ) est décroissante.
III.5.2.c Lorsque la suite est définie explicitement, un = f (n)
THÉORÈME III.5.3Soit (un)nÊn0 une suite définie par une relation du type : un = f (n).(1) Si la fonction f est croissante sur [n0 ;+∞[ ; alors la suite (un) est croissante.(2) Si la fonction f est décroissante sur [n0 ;+∞[ ; alors la suite (un ) est décroissante.
Démonstration Ce théorème est une conséquence immédiate de la DÉFINITION III.5.1äExercice III.5.3. Étudier le sens de variation de la suite (un )n∈N⋆ définie par : un =
1
n.
Solution On sait que la fonction x 7→1
xest décroissante sur [1;+∞[ donc la suite (un ) est décroissante.
Remarque La réciproque de ce théorème est fausse, la suite (un) peut être croissante sans que la fonction f le soit.
Pour s’en convaincre il suffit de considérer, par exemple, la fonction f : x 7→x
2+
1
2πsin(2πx).
La fonction f n’est pas monotone car sa dérivée, la fonction f ′ : x 7→1
2+cos(2πx), est strictement positive sur les in-
tervalles
]
k −5
12;k +
5
12
[
(k ∈ Z) et strictement négative sur les intervalles
]
k +5
12;k +
7
12
[
(k ∈ Z) ; et pourtant la
suite (un ), définie par un = f (n) =n
2, est strictement croissante (voir figure III.3).
III.5.2.d Composée d’une suite monotone par une fonction monotone
Le théorème suivant est un cas particulier du théorème ??.THÉORÈME III.5.4
Si un est une suite monotone d’éléments d’un intervalle I et si f est une fonction monotone sur I, alors f (un ) est unesuite monotone ; plus précisément, le sens de variation de f (un ) est donné dans le tableau ci-dessous.
f est croissante sur I f est décroissante sur I(un) est croissante ( f (un )) est croissante ( f (un )) est décroissante
(un ) est décroissante ( f (un )) est décroissante ( f (un )) est croissante
Exemple Considérons la suite (vn)n∈N⋆ de terme général : vn =1
n∑
k=1
1
k
.
LYCÉE PONTUS DE TYARD Terminale VI
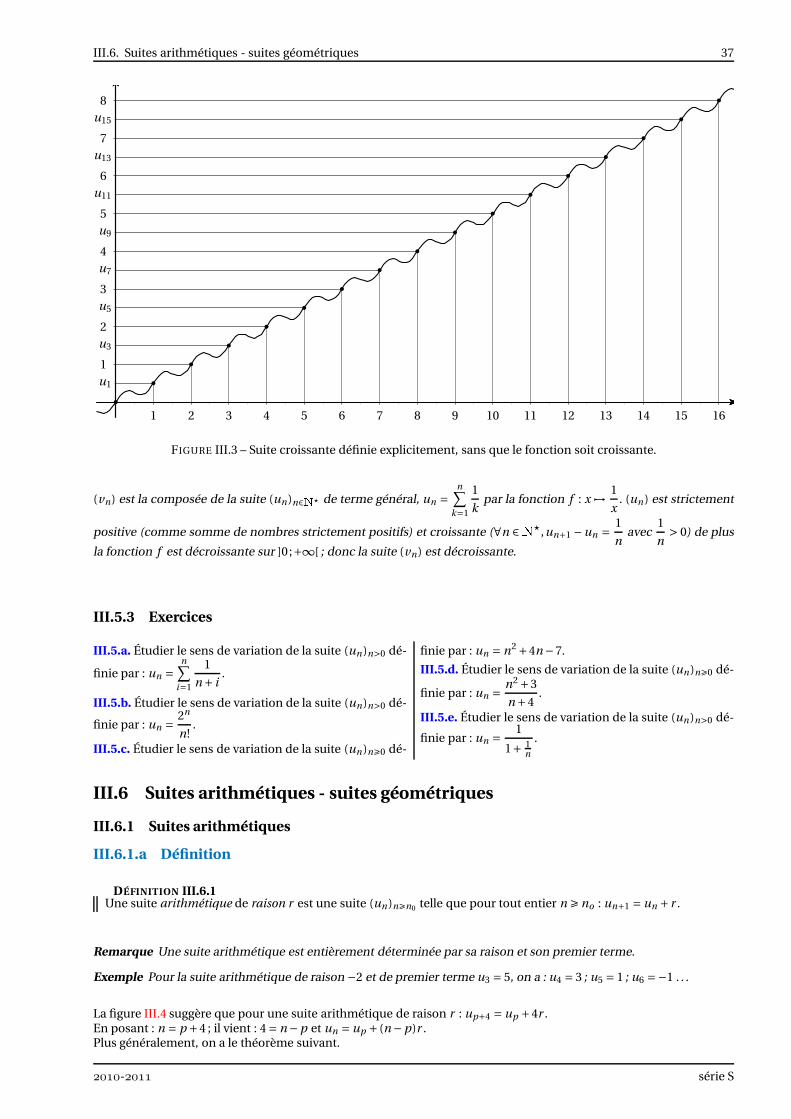
III.6. Suites arithmétiques - suites géométriques 37
1
2
3
4
5
6
7
8
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16f
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
b
u1
u3
u5
u7
u9
u11
u13
u15
FIGURE III.3 – Suite croissante définie explicitement, sans que le fonction soit croissante.
(vn) est la composée de la suite (un)n∈N⋆ de terme général, un =n∑
k=1
1
kpar la fonction f : x 7→
1
x. (un ) est strictement
positive (comme somme de nombres strictement positifs) et croissante (∀n ∈N⋆,un+1 −un =1
navec
1
n> 0) de plus
la fonction f est décroissante sur ]0;+∞[ ; donc la suite (vn) est décroissante.
III.5.3 Exercices
III.5.a. Étudier le sens de variation de la suite (un )n>0 dé-
finie par : un =n∑
i=1
1
n+ i.
III.5.b. Étudier le sens de variation de la suite (un)n>0 dé-
finie par : un =2n
n!.
III.5.c. Étudier le sens de variation de la suite (un )nÊ0 dé-
finie par : un = n2 +4n−7.
III.5.d. Étudier le sens de variation de la suite (un )nÊ0 dé-
finie par : un =n2 +3
n+4.
III.5.e. Étudier le sens de variation de la suite (un )n>0 dé-
finie par : un =1
1+ 1n
.
III.6 Suites arithmétiques - suites géométriques
III.6.1 Suites arithmétiques
III.6.1.a Définition
DÉFINITION III.6.1Une suite arithmétique de raison r est une suite (un )nÊn0 telle que pour tout entier n Ê no : un+1 = un + r .
Remarque Une suite arithmétique est entièrement déterminée par sa raison et son premier terme.
Exemple Pour la suite arithmétique de raison −2 et de premier terme u3 = 5, on a : u4 = 3 ; u5 = 1 ; u6 =−1 . . .
La figure III.4 suggère que pour une suite arithmétique de raison r : up+4 = up +4r .En posant : n = p +4 ; il vient : 4= n−p et un = up + (n−p)r .Plus généralement, on a le théorème suivant.
- série S
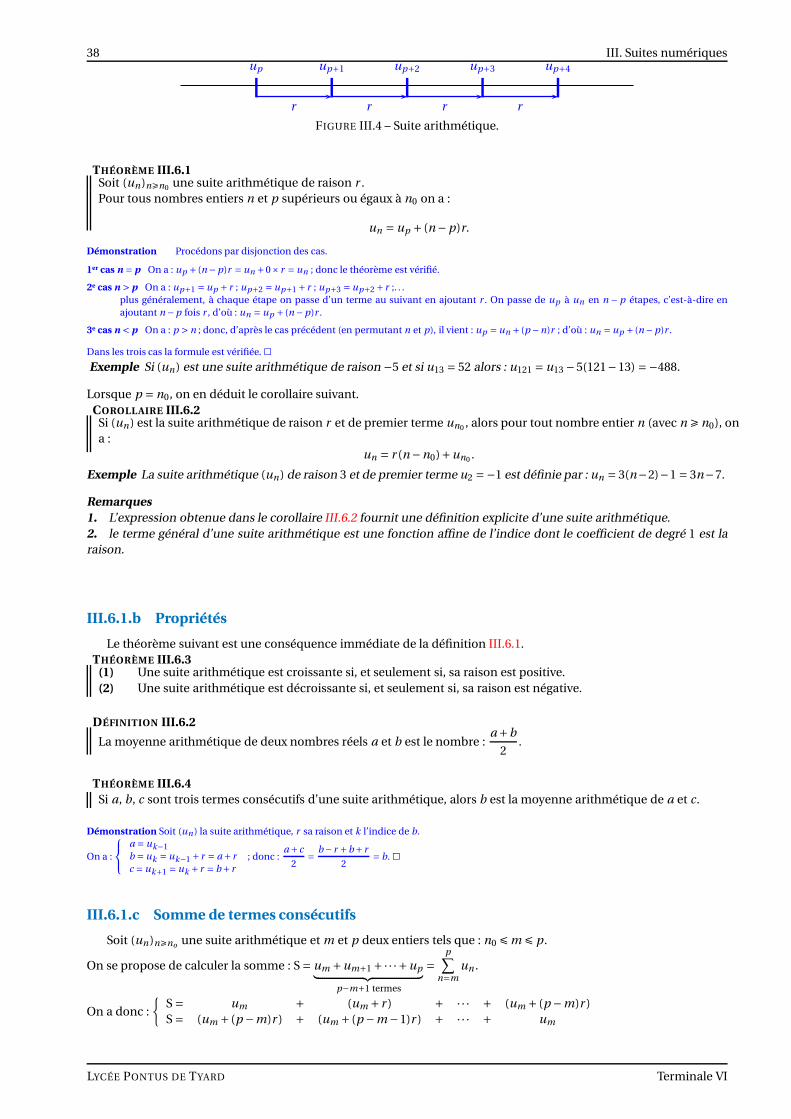
38 III. Suites numériques
| | | | |up up+1 up+2 up+3 up+4
rr rr
FIGURE III.4 – Suite arithmétique.
THÉORÈME III.6.1Soit (un)nÊn0 une suite arithmétique de raison r .Pour tous nombres entiers n et p supérieurs ou égaux à n0 on a :
un = up + (n−p)r.
Démonstration Procédons par disjonction des cas.
1er cas n = p On a : up + (n −p)r =un +0× r =un ; donc le théorème est vérifié.
2e cas n > p On a : up+1 =up + r ; up+2 =up+1 + r ; up+3 =up+2 + r ;. . .plus généralement, à chaque étape on passe d’un terme au suivant en ajoutant r . On passe de up à un en n − p étapes, c’est-à-dire enajoutant n −p fois r , d’où : un = up + (n −p)r .
3e cas n < p On a : p > n ; donc, d’après le cas précédent (en permutant n et p), il vient : up =un + (p −n)r ; d’où : un =up + (n −p)r .
Dans les trois cas la formule est vérifiée. äExemple Si (un ) est une suite arithmétique de raison −5 et si u13 = 52 alors : u121 = u13 −5(121−13) =−488.
Lorsque p = n0, on en déduit le corollaire suivant.COROLLAIRE III.6.2
Si (un ) est la suite arithmétique de raison r et de premier terme un0 , alors pour tout nombre entier n (avec n Ê n0), ona :
un = r (n−n0)+un0 .
Exemple La suite arithmétique (un ) de raison 3 et de premier terme u2 =−1 est définie par : un = 3(n−2)−1 = 3n−7.
Remarques1. L’expression obtenue dans le corollaire III.6.2 fournit une définition explicite d’une suite arithmétique.2. le terme général d’une suite arithmétique est une fonction affine de l’indice dont le coefficient de degré 1 est laraison.
III.6.1.b Propriétés
Le théorème suivant est une conséquence immédiate de la définition III.6.1.THÉORÈME III.6.3
(1) Une suite arithmétique est croissante si, et seulement si, sa raison est positive.(2) Une suite arithmétique est décroissante si, et seulement si, sa raison est négative.
DÉFINITION III.6.2
La moyenne arithmétique de deux nombres réels a et b est le nombre :a +b
2.
THÉORÈME III.6.4Si a, b, c sont trois termes consécutifs d’une suite arithmétique, alors b est la moyenne arithmétique de a et c.
Démonstration Soit (un ) la suite arithmétique, r sa raison et k l’indice de b.
On a :
a = uk−1b =uk =uk−1 + r = a + r
c =uk+1 =uk + r = b+ r
; donc :a +c
2=
b− r +b+ r
2= b. ä
III.6.1.c Somme de termes consécutifs
Soit (un )nÊno une suite arithmétique et m et p deux entiers tels que : n0 É m É p.
On se propose de calculer la somme : S= um +um+1 +·· ·+up︸ ︷︷ ︸
p−m+1 termes
=p∑
n=m
un .
On a donc :
S = um + (um + r ) + ·· · + (um + (p −m)r )S = (um + (p −m)r ) + (um + (p −m −1)r ) + ·· · + um
LYCÉE PONTUS DE TYARD Terminale VI

III.6. Suites arithmétiques - suites géométriques 39
puis par somme : 2S = (um +um + (p −m)r ) + (um +um + (p −m)r ) + ·· · + (um +um + (p −m)r ) ; d’où finalement :
um +um+1 +·· ·+up = (p −m +1)um +up
2.
THÉORÈME III.6.5Soit (un )nÊn0 une suite arithmétique et m et p des nombres entiers naturels tels que : n0 É m É p. On a :
p∑
k=m
uk = (p −m +1)um +up
2.
On peut retenir cette formule en remarquant qu’une somme de termes consécutifs d’une suite arithmétique s’obtienten effectuant le produit du nombre de termes par la moyenne des termes extrêmes.Exercice III.6.1. Calculer la somme des n premiers nombres entiers naturels non nuls.
Solution Les n premiers nombres entiers naturels non nuls sont les n premiers de la suite arithmétique de raison 1et de premier terme, u1 = 1, donc :
n∑
k=1k = n
u1 +un
2= n
1+n
2=
n(n+1)
2.
Exercice III.6.2. Calculer la somme des n premiers nombres entiers naturels impairs.
Solution Les n premiers nombres entiers naturels impairs sont les nombres de la forme 2k−1, pour k variant de 1 à n ;ce sont donc les n premiers termes de la suite arithmétique de raison 2 et de premier terme : u1 = 1. On a : un = 2n−1.
III.6.2 Suites géométriques
III.6.2.a Définition
DÉFINITION III.6.3Une suite géométrique de raison q est une suite (un)nÊno telle que pour tout entier n Ê no : un+1 = qun .
Exemples Considérons les suites géométriques (un ), (vn) et (wn), définies surN, de raisons respectives 2, −3,1
2et de
premiers termes respectifs 3, 2, −4. Les cinq premiers termes de chaque suite sont représentés dans la tableau III.1.
n 0 1 2 3 4un 3 6 12 24 48vn 2 −6 18 −54 162
wn −4 −2 −1 −1
2−
1
4TABLE III.1 – Cinq premiers termes de suites géométriques (un ), (vn) et (wn).
Remarques1. Lorsque q = 0, la suite est nulle à partir du deuxième terme, elle est donc stationnaire.2. Lorsque q = 1, la suite est constante.3. Une suite géométrique est entièrement déterminée par sa raison et son premier terme.4. Lorsque la raison est strictement négative et le premier terme non nul, la suite est de signe alterné, elle est doncnon monotone (ni croissante ni décroissante).5. Lorsque la raison est strictement positive, la suite géométrique est du signe de son premier terme.
THÉORÈME III.6.6Soit (un )nÊn0 une suite géométrique de raison q .Pour tous nombres entiers n et p supérieurs ou égaux à n0 on a :
un = up qn−p .
Démonstration Procédons par disjonction des cas.
1er cas n = p On a : up qn−p = up q0 =up = un ; donc le théorème est vérifié.
2e cas n > p On a : up+1 =up q ; up+2 = up+1q ; up+3 =up+2q ;. . .plus généralement, à chaque étape on passe d’un terme au suivant en multipliant par q. On passe de up à un en n −p étapes, c’est-à-direen multipliant n −p fois par q, d’où : un = up qn−p .
3e cas n < p On a : p >n ; donc, d’après le cas précédent (en permutant n et p), il vient : up = un qp−n ; d’où : un = up qn−p .
- série S
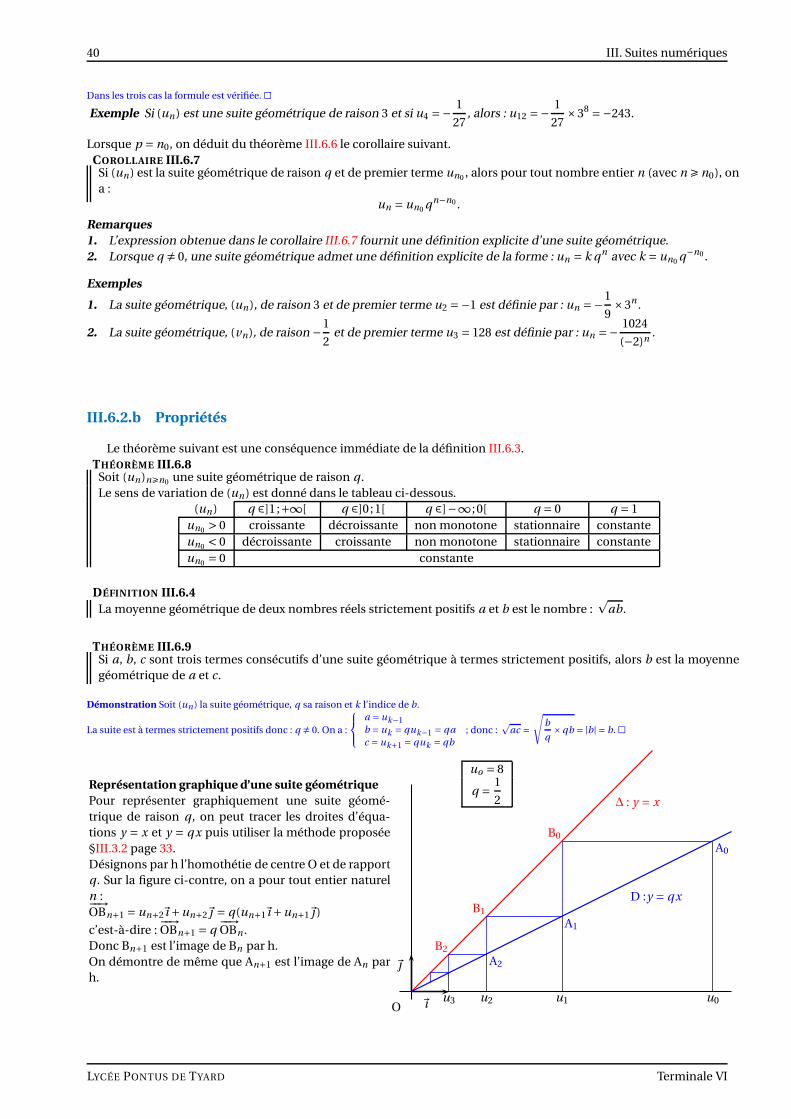
40 III. Suites numériques
Dans les trois cas la formule est vérifiée. ä
Exemple Si (un ) est une suite géométrique de raison 3 et si u4 =−1
27, alors : u12 =−
1
27×38 =−243.
Lorsque p = n0, on déduit du théorème III.6.6 le corollaire suivant.COROLLAIRE III.6.7
Si (un ) est la suite géométrique de raison q et de premier terme un0 , alors pour tout nombre entier n (avec n Ê n0), ona :
un = un0 qn−n0 .
Remarques1. L’expression obtenue dans le corollaire III.6.7 fournit une définition explicite d’une suite géométrique.2. Lorsque q , 0, une suite géométrique admet une définition explicite de la forme : un = k qn avec k = un0 q−n0 .
Exemples
1. La suite géométrique, (un ), de raison 3 et de premier terme u2 =−1 est définie par : un =−1
9×3n .
2. La suite géométrique, (vn), de raison −1
2et de premier terme u3 = 128 est définie par : un =−
1024
(−2)n.
III.6.2.b Propriétés
Le théorème suivant est une conséquence immédiate de la définition III.6.3.THÉORÈME III.6.8
Soit (un)nÊn0 une suite géométrique de raison q .Le sens de variation de (un ) est donné dans le tableau ci-dessous.
(un ) q ∈]1;+∞[ q ∈]0;1[ q ∈]−∞ ;0[ q = 0 q = 1un0 > 0 croissante décroissante non monotone stationnaire constanteun0 < 0 décroissante croissante non monotone stationnaire constanteun0 = 0 constante
DÉFINITION III.6.4La moyenne géométrique de deux nombres réels strictement positifs a et b est le nombre :
pab.
THÉORÈME III.6.9Si a, b, c sont trois termes consécutifs d’une suite géométrique à termes strictement positifs, alors b est la moyennegéométrique de a et c.
Démonstration Soit (un ) la suite géométrique, q sa raison et k l’indice de b.
La suite est à termes strictement positifs donc : q , 0. On a :
a =uk−1b =uk = quk−1 = qa
c = uk+1 = quk = qb
; donc :p
ac =
√
b
q×qb = |b| = b. ä
Représentation graphique d’une suite géométriquePour représenter graphiquement une suite géomé-trique de raison q , on peut tracer les droites d’équa-tions y = x et y = qx puis utiliser la méthode proposée§III.3.2 page 33.Désignons par h l’homothétie de centre O et de rapportq . Sur la figure ci-contre, on a pour tout entier natureln :−−→OBn+1 = un+2~ı +un+2~ = q(un+1~ı +un+1~)
c’est-à-dire :−−→OBn+1 = q
−−→OBn .
Donc Bn+1 est l’image de Bn par h.On démontre de même que An+1 est l’image de An parh.
~ı
~
O
∆ : y = x
u0u1u2u3
A0
A1
A2
B0
B1
B2
D :y = qx
uo = 8
q =1
2
LYCÉE PONTUS DE TYARD Terminale VI

III.6. Suites arithmétiques - suites géométriques 41
III.6.2.c Somme de termes consécutifs
Soit (un )nÊno une suite géométrique de raison q (avec q , 1) et m et p deux entiers tels que : n0 É m É p.
On se propose de calculer la somme : S = um +um+1 +·· ·+up︸ ︷︷ ︸
p−m+1 termes
=p∑
n=m
un .
On a donc :
S = um +qum +q2um +·· · +um qp−m
qS= qum +q2um +·· · +um qp−m +um qp−m+1
puis par différence : q S−S = um qp−m+1 −um ; d’où finalement :
um +um+1 +·· ·+up =um −up+1
1−q
On peut retenir cette formule en remarquant qu’une somme de termes consécutifs d’une suite géométrique s’obtient
en effectuant le quotient :premier terme− suivant du dernier
1− raison.
Remarque En particulier on a, pour tout entier naturel non nul n : 1+q +·· ·+qn =1−qn+1
1−q.
Exercice III.6.3. Démontrer que pour tout x ∈ [0;1[ et tout n ∈N⋆ ; on a : 1+x +··· +xn É1
1−xSolution 1+ x + ·· · + xn est la somme des n +1 premiers termes de la suite géométrique de premier terme 1 et de
raison x, donc :
1+ x +·· ·+ xn =1− xn+1
1− x.
Or 1− x est strictement positif et : 1− xn+1 É 1 (car x est positif) ; donc par quotient :
1− xn+1
1− xÉ
1
1− x;
c’est-à-dire :
1+ x +·· ·+ xn É1
1− x.
COROLLAIRE III.6.10Pour tous nombres réels a, b et pour tout entier naturel non nul n, on a :
an −bn = (a −b)(
an−1 +an−2b +an−3b2 +·· ·+abn−2 +bn−1)
Démonstration Pour a = 0, l’égalité devient : −bn =−b×bn−1 ; qui est vraie.
Pour a = b, l’égalité devient : 0= 0×nan−1 ; qui est vraie.
Lorsque a , 0 et a , b, le second facteur du second membre de l’égalité est la somme des termes consécutifs d’un suite géométrique de raisonb
a,
on en déduit que :
an−1 +an−2b+an−3 b2 +···+abn−2 +bn−1 =an−1 − bn
a
1− ba
=an −bn
b−a.
En multipliant les membres extrêmes par b−a, on en déduit l’identité désirée. äRemarques1. Lorsque n = 2, on retrouve l’identité II.3 et lorsque n = 3, on retrouve l’identité II.6.2. Lorsque n est impaire, en remplaçant b par −b, on obtient :
an +bn = (a +b)(
an−1 −an−2b +an−3b2 −·· ·+abn−2 −bn−1)
Lorsque n = 3, on retrouve l’identité II.7.
III.6.3 Exercices résolus
III.6.3.a Suite arithmético-géométrique
Exercice III.6.4. On considère la suite (un )n∈N définie par :
u0 =−2
un+1 =−1
2un +3
.
1. Déterminer un réel a tel que la suite (vn )n∈N définie par : vn = un −a ; soit géométrique.
- série S

42 III. Suites numériques
2. Exprimer explicitement le terme général de la suite (vn ) ; en déduire celui de la suite (un ).
Solution Pour se faire une idée, entreprenons une étude graphique.
On trace les droites D et ∆ d’équations respectives :
y =−1
2x +3 et y = x.
Les coordonnées du point Ω(2;2) vérifient les équations de D et ∆,donc Ω est le point d’intersection de ces deux droites sécantes.Il semble sur le graphique (on pourrait aisément le démontrer géo-métriquement) qu’une homothétie h, de centre Ω, transforme (pour
tout n) An en An+1. Ce qui suggère une relation du type :−−→ΩA n+1 =
k−−→ΩA n .
Or les vecteurs−−→ΩA n+1 et
−−→ΩA n ont respectivement pour abscisses
un+1 −2 et un −2.~ı
~
O
∆ : y = x
Ω
u0 u1u2 u32
2
A0
A1
A2
B0
B2
B1
D :y =−1
2x +3
On aurait donc : un+1 −2 = k(un −2).Ces observations graphiques nous conduisent à examiner si pour a = 2, la suite (vn) est géométrique.
Pour tout n ∈N, on a : vn+1 = un+1 −2 =−1
2un +3−2 =−
1
2un +1 =−
1
2(un −2) =−
1
2vn .
Donc, pour a = 2, la suite (vn) est la suite géométrique de raison −1
2et de premier terme v0 =−4.
Par conséquent la suite (vn) est définie par : vn =−4
(
−1
2
)n
.
De plus, pour tout n ∈N, on a : un = vn +2 ;
donc la suite (un ) est définie par : un =−4
(
−1
2
)n
+2.
MMPour deviner le comportement d’une suite, une étude graphique (lorsqu’elle est envisageable) est souvent fructueuse.
MMPour démontrer qu’une suite (vn ) est géométrique, on peut exprimer vn+1 en fonction de vn de façon à exhiber une relation du type :
vn+1 = q vn .
III.7 Limites de suites
Soit a un réel et r un réel strictement positif. On appelle intervalle ouvert de centre a et de rayon r l’intervalle ou-vert ]a−r, a+r [. Cet intervalle sera noté Ia,r . Ia,r est l’ensemble des réels dont la distance à a est strictement inférieureà r . Pour tout réel x on a donc :
x ∈ Ia,r ⇐⇒ |x −a| < r. |a a + ra − r
rr
III.7.1 Limite finie, limite infinie
III.7.1.a Définitions
DÉFINITION III.7.1Dire qu’un réel ℓ est la limite d’une suite (un ) signifie que tout intervalle ouvert de centre ℓ contient tous les termes dela suite à partir d’un certain indice. On écrit alors :
limn→+∞
un = ℓ.
Exemple Démontrons que la suite (un )n∈N⋆ définie par : un =1p
n; a pour limite 0.
Soit ]− r ;r [ (avec r > 0) un intervalle ouvert centré en 0.Cherchons un entier N tel que pour tout naturel n Ê N, on ait : un ∈]− r ;r [ ; c’est-à-dire : −r < un < r .
Il suffit de prendre un entier N tel que : N>1
r 2.
En effet, pour tout entier naturel n Ê N, on a alors : n Ê N >1
r 2; la fonction x 7→
px est strictement croissante surR+⋆,
LYCÉE PONTUS DE TYARD Terminale VI
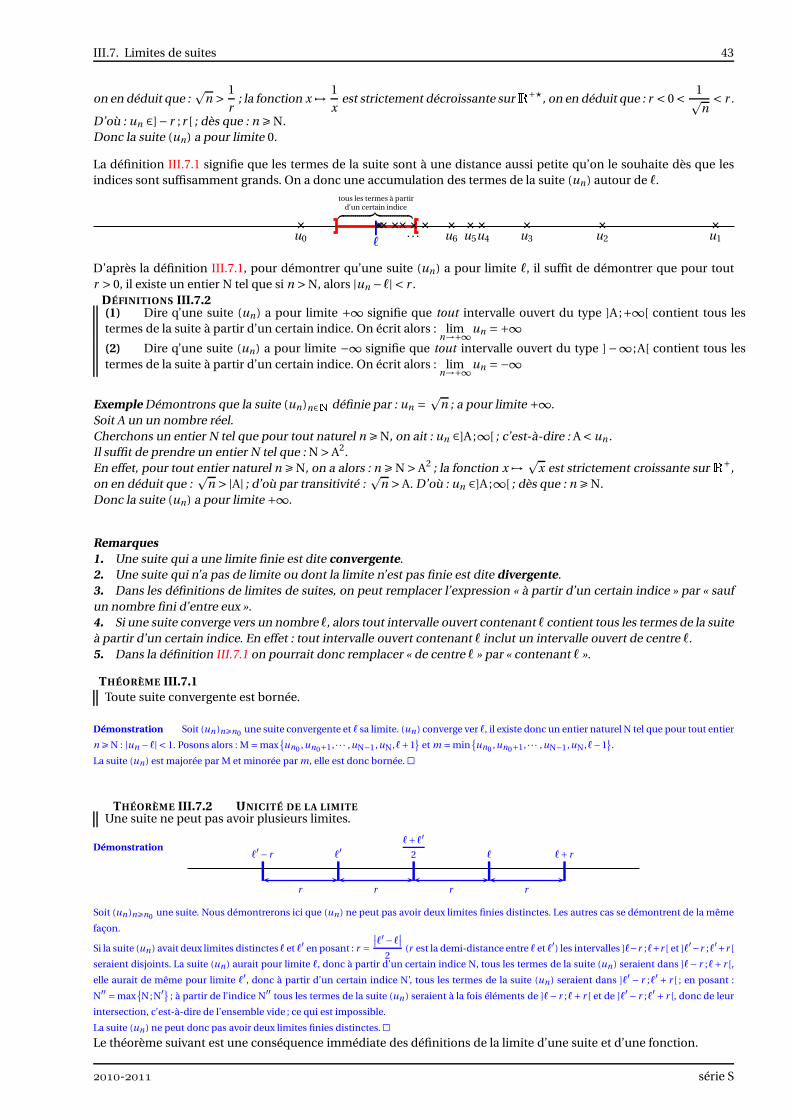
III.7. Limites de suites 43
on en déduit que :p
n >1
r; la fonction x 7→
1
xest strictement décroissante surR+⋆, on en déduit que : r < 0 <
1p
n< r .
D’où : un ∈]− r ;r [ ; dès que : n Ê N.Donc la suite (un) a pour limite 0.
La définition III.7.1 signifie que les termes de la suite sont à une distance aussi petite qu’on le souhaite dès que lesindices sont suffisamment grands. On a donc une accumulation des termes de la suite (un ) autour de ℓ.
|ℓ
tous les termes à partird’un certain indice
︷ ︸︸ ︷
× ×× ×××××××××××u0 u1u2u3u4u5u6· · ·
D’après la définition III.7.1, pour démontrer qu’une suite (un ) a pour limite ℓ, il suffit de démontrer que pour toutr > 0, il existe un entier N tel que si n > N, alors |un −ℓ| < r .
DÉFINITIONS III.7.2(1) Dire q’une suite (un ) a pour limite +∞ signifie que tout intervalle ouvert du type ]A;+∞[ contient tous lestermes de la suite à partir d’un certain indice. On écrit alors : lim
n→+∞un =+∞
(2) Dire q’une suite (un) a pour limite −∞ signifie que tout intervalle ouvert du type ]−∞ ;A[ contient tous lestermes de la suite à partir d’un certain indice. On écrit alors : lim
n→+∞un =−∞
Exemple Démontrons que la suite (un)n∈N définie par : un =p
n ; a pour limite +∞.Soit A un un nombre réel.Cherchons un entier N tel que pour tout naturel n Ê N, on ait : un ∈]A;∞[ ; c’est-à-dire : A< un .Il suffit de prendre un entier N tel que : N > A2.En effet, pour tout entier naturel n Ê N, on a alors : n Ê N > A2 ; la fonction x 7→
px est strictement croissante surR+,
on en déduit que :p
n > |A| ; d’où par transitivité :p
n > A. D’où : un ∈]A;∞[ ; dès que : n Ê N.Donc la suite (un) a pour limite +∞.
Remarques1. Une suite qui a une limite finie est dite convergente.2. Une suite qui n’a pas de limite ou dont la limite n’est pas finie est dite divergente.3. Dans les définitions de limites de suites, on peut remplacer l’expression « à partir d’un certain indice » par « saufun nombre fini d’entre eux ».4. Si une suite converge vers un nombre ℓ, alors tout intervalle ouvert contenant ℓ contient tous les termes de la suiteà partir d’un certain indice. En effet : tout intervalle ouvert contenant ℓ inclut un intervalle ouvert de centre ℓ.5. Dans la définition III.7.1 on pourrait donc remplacer « de centre ℓ » par « contenant ℓ ».
THÉORÈME III.7.1Toute suite convergente est bornée.
Démonstration Soit (un )nÊn0 une suite convergente et ℓ sa limite. (un ) converge ver ℓ, il existe donc un entier naturel N tel que pour tout entier
n Ê N : |un −ℓ| < 1. Posons alors : M = max
un0 ,un0+1, · · · ,uN−1 ,uN,ℓ+1
et m =min
un0 ,un0+1, · · · ,uN−1,uN,ℓ−1
.
La suite (un ) est majorée par M et minorée par m, elle est donc bornée. ä
THÉORÈME III.7.2 UNICITÉ DE LA LIMITEUne suite ne peut pas avoir plusieurs limites.
Démonstration
| | | | |ℓ′− r ℓ′
ℓ+ℓ′
2 ℓ ℓ+ r
rr rr
Soit (un )nÊn0 une suite. Nous démontrerons ici que (un ) ne peut pas avoir deux limites finies distinctes. Les autres cas se démontrent de la même
façon.
Si la suite (un ) avait deux limites distinctes ℓ et ℓ′ en posant : r =∣∣ℓ′−ℓ
∣∣
2(r est la demi-distance entre ℓ et ℓ′) les intervalles ]ℓ−r ;ℓ+r [ et ]ℓ′−r ;ℓ′+r [
seraient disjoints. La suite (un ) aurait pour limite ℓ, donc à partir d’un certain indice N, tous les termes de la suite (un ) seraient dans ]ℓ− r ;ℓ+ r [,
elle aurait de même pour limite ℓ′, donc à partir d’un certain indice N’, tous les termes de la suite (un ) seraient dans ]ℓ′ − r ;ℓ′ + r [ ; en posant :
N′′ =max
N;N′ ; à partir de l’indice N′′ tous les termes de la suite (un ) seraient à la fois éléments de ]ℓ− r ;ℓ+ r [ et de ]ℓ′− r ;ℓ′ + r [, donc de leur
intersection, c’est-à-dire de l’ensemble vide ; ce qui est impossible.
La suite (un ) ne peut donc pas avoir deux limites finies distinctes. äLe théorème suivant est une conséquence immédiate des définitions de la limite d’une suite et d’une fonction.
- série S

44 III. Suites numériques
THÉORÈME III.7.3Soit (un)nÊn0 une suite définie explicitement par une relation du type : un = f (n).Si lim
x→+∞f (x) = L avec L ∈R∪ −∞,+∞, alors : lim
n→+∞un = L
Remarques1. La réciproque de ce théorème est fausse.2. Ce théorème n’est pas applicable dans le cas d’une suite définie par récurrence.
III.7.2 Théorèmes de comparaisons
THÉORÈME III.7.4 THÉORÈME DES GENDARMES 1RE FORMESoit (un)nÊn0 , (vn)nÊn0 et (wn)nÊn0 trois suites.Si (vn) et (wn) convergent vers une même limite ℓ et si pour tout entier n Ê n0 :
vn É un É wn ;
alors (un ) converge vers ℓ.
Démonstration Soit r un réel strictement positif. il suffit donc de prouver qu’à partir d’un certain indice tous les termes de la suite sont dansl’intervalle ouvert, Iℓ,r de centre ℓ et de rayon r .La suite (vn ) converge vers ℓ, donc à partir d’un certain indice, Nv , sont dans Iℓ,r .La suite (wn ) converge vers ℓ, donc à partir d’un certain indice, Nw , sont dans Iℓ,r .Posons : N = max
Nv ;Nw
. Pour tout entier n ÊN, on a : ℓ− r < vn É un É wn < ℓ+ r .Donc la suite (un ) converge vers ℓ. ä
Exercice III.7.1. Déterminer la limite de la suite (un )n∈N⋆ définie par : un =1+ (−1)n
n.
Solution Pour tout entier n > 0, on a : 1+ (−1)n =
2 si n est pair
0 si n est impair; d’où : 0 É 1+ (−1)n É 2.
Pour tout entier n > 0, en divisant membre à membre par n, il vient : 0É un É2
n.
Or on sait que : limn→+∞
1
n= 0 ; donc par produit par 2 : lim
n→+∞2
n= 0 ;
d’après le théorème des gendarmes, on en déduit que : limn→+∞
un = 0.
Remarques1. Le théorème III.7.4 reste vrai même si la condition vn É un É wn n’est pas vérifiée pour tout n, mais seulement àpartir d’un certain indice.2. Plus généralement, tous les théorème de ce paragraphe reste vrai même si leur condition d’inégalité n’est pas vé-rifiée pour tout n, mais seulement à partir d’un certain indice.
COROLLAIRE III.7.5 THÉORÈME DES GENDARMES 2E FORMESoit (un)nÊn0 une suite.S’il existe une suite positive (dn )nÊn0 et un réel ℓ tels que pour tout entier n Ê n0 :
|un −ℓ| É dn ;
alors (un ) converge vers ℓ.
DémonstrationIl suffit d’appliquer le théorème III.7.4 avec les suites (vn )nÊn0 et (wn )nÊn0 de termes généraux : vn = ℓ−dn et wn = ℓ+dn . ä
Exercice III.7.2. Déterminer la limite de la suite (un )n∈N⋆ définie par : un = 1+(−1)n
n.
Solution Pour tout entier n > 0, on a : |un −1| É1
n.
Or on sait que : limn→+∞
1
n= 0 ; d’après le théorème des gendarmes, on en déduit que : lim
n→+∞un = 1.
THÉORÈME III.7.6Soit (un)nÊn0 et (vn)nÊn0 deux suites.(1) Si : lim
n→+∞vn =+∞ et si pour tout entier n Ê n0 : vn É un , alors : lim
n→+∞un =+∞.
(2) Si : limn→+∞
vn =−∞ et si pour tout entier n Ê n0 : vn Ê un , alors : limn→+∞
un =−∞.
Démonstration Pour démontrer ce théorème, il suffit de s’assurer que dans les deux cas la suite (un ) vérifie les conditions de la définition III.7.2.(1) Soit ]A;+∞[ un intervalle. La suite vn tend vers +∞, donc à partir d’un certain indice N, tous les termes de la suite (vn ) sont dans l’intervalle]A;+∞[. Ainsi, pour tout nombre entier n supérieur ou égal à N, un Ê vn Ê A ; c’est-à-dire : vn ∈]A;+∞[. La suite un diverge vers +∞.
LYCÉE PONTUS DE TYARD Terminale VI

III.7. Limites de suites 45
(2) se démontre de la même façon. ä
Exercice III.7.3. Déterminer la limite de la suite (un )n∈N⋆ définie par : un = n +(−1)n
n.
Solution Pour tout entier n > 0, on a : un Ê n−1.Or on sait que : lim
n→+∞(n−1) =+∞ ; par comparaison, on en déduit que : lim
n→+∞un =+∞.
THÉORÈME III.7.7Soit (un )nÊn0 et (vn)nÊn0 deux suites convergentes et ℓ et ℓ′ leurs limites respectives.Si pour tout entier n Ê n0 : un É vn alors ℓÉ ℓ′
Démonstration
| | | | |ℓ′− r ℓ′
ℓ+ℓ′
2 ℓ ℓ+ r
rr rr
Supposons que : ℓ> ℓ′ ; posons alors : r =ℓ−ℓ′
2(r est la demi-distance entre ℓ et ℓ′).
On a donc : ℓ′ + r =ℓ+ℓ′
2= ℓ− r . Les intervalles ]ℓ− r ;ℓ+ r [ et ]ℓ′ − r ;ℓ′ + r [ sont donc disjoints. À partir d’un certain indice N, tous les termes
de la suite (un ) sont dans ]ℓ− r ;ℓ+ r [ et à partir d’un certain indice N’, tous les termes de la suite (vn ) seraient dans ]ℓ′ − r ;ℓ′ + r [ ; en posant :
N′′ =max
N;N′ ; à partir de l’indice N′′ on a : ℓ′− r < vn <ℓ+ℓ′
2<un < ℓ+ r ; ce qui contredit : un É vn .
Donc : ℓÉ ℓ′. äRemarques1. En particulier, si M est majorant de (un), alors : ℓÉ M.2. Si M est minorant de (un ), alors : m É ℓ.3. Le théorème III.7.7 devient faux si on remplace les inégalités larges par des inégalités strictes. Pour s’en convaincre
il suffit d’étudier les cas des suites de termes généraux : un =1
net vn =−
1
n
III.7.2.a Suites de références
THÉORÈME III.7.8
Les suites (un)n∈N⋆ , (vn)n∈N⋆ , (wn)n∈N⋆ , (tn )n∈N⋆ , définies par : un =1
n; vn =
1
n2; wn =
1
n3; tn =
1p
n;
ont pour limite 0.
Démonstration Soit ]− r ;r [ un intervalle contenant 0 et N un entier strictement plus grand que1
r 2.
Pour tout entier n ÊN, on a :
⋄ wn É vn Éun É tn , car : 0 <1
nÉ 1 ;
⋄ n >1
r 2; donc :
pn >
1
r(car x 7→
px est strictement croissante) ; d’où :
1p
n< r (car x 7→
1
xest strictement décroissante sur ]0;+∞[) ;
c’est-à-dire : tn < r ;⋄ donc finalement : −r < 0 < wn É vn Éun É tn < r .
Pour tout r > 0, il existe un indice N à partir duquel tous les termes des suites considérées sont dans l’intervalle ]− r ;r [, elles convergent donc vers0. ä
THÉORÈME III.7.9Les suites (un)n∈N, (vn)n∈N, (wn)n∈N, (tn)n∈N, définies par : un = n ; vn = n2 ; wn = n3 ; tn =
pn ;
ont pour limite +∞.
Démonstration Soit A un réel et N un entier strictement plus grand que A2 et que 1.Pour tout entier n ÊN, on a :
⋄ tn Éun É vn É wn , car : 1 < n ;⋄ n > A2 ; donc :
pn > |A| ÊA (car x 7→
px est strictement croissante) ; c’est-à-dire : A < tn ;
⋄ donc finalement : A < tn É un É vn É wn .
Pour tout réel A, il existe un indice N à partir duquel tous les termes des suites considérées sont dans l’intervalle ]A;+∞[, elles divergent donc vers
+∞. ä
Remarque Les théorèmes III.7.8 et III.7.9 peuvent également se déduire du théorème III.7.3.
III.7.3 Calcul algébrique de limites
III.7.3.a Somme de deux suites convergentes
Soit (un )nÊn0 et (vn)nÊn0 deux suites convergentes et ℓ et ℓ′ leurs limites respectives.Démontrons que la suite de terme général un + vn converge vers ℓ+ℓ′.
- série S

46 III. Suites numériques
Soit r > 0.La suite (un ) converge vers ℓ, il existe donc un entier N tel que pour tout entier n Ê N :
|un −ℓ| <r
2.
La suite (vn) converge vers ℓ′, il existe donc un entier N’ tel que pour tout entier n Ê N′ :
∣∣vn −ℓ′
∣∣<
r
2.
Posons : N′′ = max
N;N′. En utilisant l’inégalité triangulaire, on a pour tout entier n Ê N′′ :
∣∣(un + vn)− (ℓ+ℓ′)
∣∣É |un −ℓ|+
∣∣vn −ℓ′
∣∣< r
Donc la suite de terme général un + vn converge vers ℓ+ℓ′.En particulier, pour tout réel k, la suite de terme général un +k converge vers ℓ+k.
III.7.3.b Produit de deux suites convergentes
Soit (un )nÊn0 et (vn)nÊn0 deux suites convergentes et ℓ et ℓ′ leurs limites respectives.Démontrons que la suite de terme général un × vn converge vers ℓ×ℓ′.Les suites (un ) et (vn) sont convergentes donc, d’après le théorème III.7.1 elle sont bornées. En appliquant le théorèmeIII.1.1 on en déduit l’existence des nombres réels M et M′ tels que pour tout entier n Ê n0 : |un | É M et|vn | É M′ .Soit r > 0.La suite (un ) converge vers ℓ, il existe donc un entier N tel que pour tout entier n Ê N :
|un −ℓ| <r
2M′ .
La suite (vn) converge vers ℓ′, il existe donc un entier N’ tel que pour tout entier n Ê N′ :
∣∣vn −ℓ′
∣∣<
r
2M.
Posons : N′′ = max
N;N′. En utilisant l’inégalité triangulaire, on a pour tout entier n Ê N′′ :
∣∣(un × vn)− (ℓ×ℓ′)
∣∣É
∣∣un (vn −ℓ′)+ℓ′(un −ℓ)
∣∣É |un |×
∣∣vn −ℓ′
∣∣+
∣∣ℓ′
∣∣×|un −ℓ| É |un |×
r
2M+
∣∣ℓ′
∣∣×
r
2M′
D’où :∣∣(un × vn)− (ℓ×ℓ′)
∣∣É
|un |M
×r
2+
ℓ′
M′ ×r
2
Or, par définition des nombres M et M′ et d’après la remarque consécutive au THÉORÈME III.7.7,|un |M
É 1 etℓ′
M′ É 1.
Donc par somme et par produit parr
2qui est positif :
∣∣(un × vn)− (ℓ×ℓ′)
∣∣É
|un |M
×r
2+
ℓ′
M′ ×r
2É r.
Pour tout r > 0 il existe un indice à partir duquel tous les termes de la suite (un × vn) sont dans l’intervalle de centreℓℓ′ et de rayon r .Donc la suite de terme général un × vn converge vers ℓ×ℓ′.En particulier, pour tout réel k, la suite de terme général kun converge vers kℓ.
III.7.3.c Inverse d’une suite convergente
Soit (un )nÊn0 une suite convergeant vers une limite non-nulle ℓ.
Démontrons que la suite de terme général1
unconverge vers
1
ℓ.
| |ℓ 0
ℓ
2
3ℓ
2
|ℓ|2
|ℓ|2
|ℓ|2
FIGURE III.5 –
LYCÉE PONTUS DE TYARD Terminale VI

III.7. Limites de suites 47
À partir d’un certain indice N, tous les termes de la suite sont compris entreℓ
2et
3ℓ
2.
On a alors : |un | Ê|ℓ|2
; d’où :
1
|un |É
2
|ℓ|.
À partir de l’indice N, on a donc : ∣∣∣∣
1
un−
1
ℓ
∣∣∣∣É
|un −ℓ||un | |ℓ|
É2
ℓ2|un −ℓ| .
Soit r > 0. À partir d’un certain indice N’, tous les termes de la suite (un ) sont dans l’intervalle de centre ℓ et de rayonℓ2
2r , on a alors : |un −ℓ| É
ℓ2
2r . D’où, par produit par
2
ℓ2:
2
ℓ2|un −ℓ| É r.
Posons : N′′ = max
N,N′. À partir de l’indice N′′, on a donc :∣∣∣∣
1
un−
1
ℓ
∣∣∣∣É r.
Pour tout r > 0, à partir d’un certain indice tous les termes de la suite
(1
un
)
sont dans l’interlvalle de centre1
ℓet de
rayon r , donc la suite
(1
un
)
converge vers1
ℓ.
III.7.3.d Quotient de deux suites convergentes
Soit (un )nÊn0 et (vn)nÊn0 deux suites convergentes et ℓ et ℓ′ leurs limites respectives (avec ℓ′ , 0).
Démontrons que la suite de terme généralun
vnconverge vers
ℓ
ℓ′.
D’après III.7.3.c, la suite de terme général1
unconverge vers
1
ℓ.
Donc daprès III.7.3.b, la suite de terme généralun
vnconverge vers
ℓ
ℓ′.
III.7.3.e Cas général
Plus généralement nous admettons les résultats suivants concernant la limite de la somme, du produit ou du quo-tient de deux suites, ils se démontrent en utilisant des techniques semblables à celles utilisée ci-dessus. Le symbole« fi » signifie : forme indéterminée ; cela signifie que lers règles usuelles liant les opérations et le calcul de limites nepermettent pas de déterminer la limite éventuelle dans la configuration étudiée.
Limite de la somme de deux suites
limn→+∞
un ℓ +∞ −∞ +∞ −∞ +∞lim
n→+∞vn ℓ′ ℓ′ ℓ′ +∞ −∞ −∞
limn→+∞
(un + vn) ℓ+ℓ′ +∞ −∞ +∞ −∞ fi
Limite du produit de deux suites
limn→+∞
un ℓ +∞ −∞ +∞ ou −∞ +∞ −∞ +∞lim
n→+∞vn ℓ′ ℓ′ (ℓ′ , 0) ℓ′ (ℓ′ , 0) 0 +∞ −∞ −∞
limn→+∞
(un vn) ℓℓ′
+∞ , si ℓ′ > 0
−∞ , si ℓ′ < 0
−∞ , si ℓ′ > 0
+∞ , si ℓ′ < 0fi +∞ +∞ −∞
Limite de l’inverse d’une suite
On suppose ici que la suite de terme général1
vnest bien définie.
limn→+∞
un ℓ (ℓ, 0) +∞ −∞ 0
limn→+∞
1
un
1
ℓ0 0
+∞ , si (un)est strictement positive à partir d’un certain indice
−∞ , si (un)est strictement négative à partir d’un certain indice
- série S

48 III. Suites numériques
Limite du quotient de deux suites
On suppose ici que la suite de terme généralun
vnest bien définie.
Pour calculer la limite de la suite de terme généralun
vn, il suffit de remarquer que pour tout nombre entier, n, ou elle
est définie :un
vn= un ×
1
vn.
Le résultat désiré se déduit alors des considérations sur les limites de somme et d’inverse de suites.
III.7.4 Limites de suites géométriques
LEMME III.7.10
Soit λ un réel strictement positif.(1) Si λ> 1 alors : lim
n→+∞λn =+∞.
(2) Si λ< 1 alors : limn→+∞
λn = 0.
Démonstration Démontrons (1) .Posons : x = λ− 1. On a : x > 0 ; donc, d’après l’inégalité de Bernoulli (voir exercice résolu ?? page ??), pour tout nombre entier supérieur à 2 :(1+x)n > 1+nx ; c’est-à-dire : λn >n(λ−1)+1.Or, d’après le théorème III.7.3 : lim
n→+∞(n(λ−1)+1) =+∞ ; donc par comparaison (théorème III.7.6) : lim
n→+∞λn =+∞.
Démontrons (2) .
Soit λ ∈]0;1[. Posons : λ′ =1
λ. On a : λ′ > 1 ; donc d’après (1) : lim
n→+∞λ′n = +∞ ; d’où, par passage à l’inverse : lim
n→+∞1
λ′n= 0 c’est-à-dire :
limn→+∞
λn = 0. ä
THÉORÈME III.7.11
Soit (un ) une suite géométrique de raison q et de premier terme a. La limite de (un) est donnée par le tableau suivant.
q É−1∣∣q
∣∣< 1 q = 1 1< q
a > 0 pas de limite a +∞a = 0 0a < 0 pas de limite a −∞
Démonstration
1er cas : a = 0 ou q = 1 Le résultat est immédiat car la suite est constante.
2e cas : a > 0 et q , 1
si∣∣q
∣∣< 1 On a vu (§ III.7.1.a) qu’il suffit de démontrer que : lim
n→+∞|un −0| = 0.
Or pour tout indice n : |un −0| = a∣∣q
∣∣n ; de plus, d’après le lemme III.7.10 : lim
n→+∞
∣∣q
∣∣n =, donc par produit : lim
n→+∞|un | = 0.
si 1 < q On a : limn→+∞
|un | =+∞ or (un ) est une suite à termes positifs, donc : limn→+∞
un =+∞.
si q É−1 On a : limn→+∞
|un | =+∞ ou limn→+∞
|un | = 1 ; or les termes un changent de signe avec la parité de n, donc (un ) n’a pas de limite.
3e cas : a < 0 et q , 1 On déduit les résultats désirés des résultats obtenus au cas précédent en multipliant par −1.
ä
III.7.5 Exercices
III.7.a. Étudier la limite de la suite (un )n∈N⋆ définie par :
un =n−3
n+3.
III.7.b. Étudier la limite de la suite (un )n∈N⋆ définie par :
un =n2 −3
n+3.
III.7.c. Donner un contre exemple illustrant la remarque1 succédant au théorème III.7.3.
III.7.d. Donner un exemple de suite divergente et bornée.
III.7.e. Donner un exemple de suite dont la limite est +∞et qui n’est pas croissante à partir d’un certain indice.
III.7.f. Donner un exemple de suite non majorée qui nediverge pas vers +∞.
III.7.g. Donner deux suites (un )n∈N et (vn)n∈N telles que :lim
n→+∞un =+∞ , lim
n→+∞vn =−∞ et
a. limn→+∞
(un + vn) = 0.
b. limn→+∞
(un + vn) =+∞.
c. limn→+∞
(un + vn) =−∞.
d. limn→+∞
(un + vn) =π.
e. (un + vn) n’a pas de limite.
III.7.h. Donner deux suites (un )n∈N et (vn)n∈N telles que :
LYCÉE PONTUS DE TYARD Terminale VI

III.8. Suites monotones bornées 49
limn→+∞
un =+∞ , limn→+∞
vn = 0 et
a. limn→+∞
(un vn) = 0.
b. limn→+∞
(un vn) =+∞.
c. limn→+∞
(un vn) =−∞.
d. limn→+∞
(un vn) =π.
e. (un vn) n’a pas de limite.
III.8 Suites monotones bornées
III.8.1 Théorème de convergence d’une suite monotone
THÉORÈME III.8.1(1) Toute suite croissante et majorée est convergente et sa limite est sa borne supérieure.(2) Toute suite décroissante et minorée est convergente et sa limite est sa borne inférieure.
Démonstration(1) Soit (un )nÊn0 une suite croissante et majorée. La suite (un ) est majorée, d’après le théorème III.1.2, il a donc une borne supérieure ℓ.On veut donc démontrer que (un ) converge vers ℓ.Pour tout entier n Ên0, on a : un É ℓ.
Soit r un réel strictement positif, démontrons qu’à partir d’un certain indice tous les termes de la suite (un ) vérifie : ℓ− r <un < ℓ+ r .ℓ est le plus petit des majorants et : ℓ− r < ℓ ; donc ℓ− r n’est pas un majorant, on en déduit qu’il existe un indice N tel que : ℓ− r < uN.Mais la suite (un ) est croissante et majorée par ℓ, donc pour tout entier n ÊN : ℓ− r < uN Éun É ℓ< ℓ+ r .Donc la suite (un ) converge vers ℓ.On démontre (2) de la même façon. äCe théorème s’applique dans le cas d’une suite monotone dont on connaît un majorant M (dans le cas où la suite estcroissante) ou un minorant m (dans le cas où la suite est décroissante) mais dont on ne sait pas calculer algébrique-ment la limite.On obtient ainsi l’existence d’une limite mais on ne connaît pas sa valeur. On a toutefois une information partielle surla localisation de la limite : un0 É ℓÉ M ou m É ℓÉ un0 .Nous verrons ultérieurement des méthodes permettant d’exploiter ces informations pour déterminer la limite.
Remarque Dans le théorème III.8.1, si la suite n’est monotone qu’à partir d’un certain indice, elle reste encore conver-gente.
Exercice III.8.1. On considère la suite (un )n∈N définie par :
un =1
n!+
n∑
k=0
1
k !.
1. Calculer les cinq premiers termes de la suite.
2. Démontrer que la suite (un ) est décroissante à partir de l’indice 1.
3. Justifier que (un ) est convergente et préciser un intervalle dans le quel se trouve sa limite.
Solution
1. u0 =1
0!+
1
0!= 2
u1 =1
1!+
1
0!+
1
1!= 3
u2 =1
2!+
1
0!+
1
1!+
1
2!= 3
u3 =1
3!+
1
0!+
1
1!+
1
2!+
1
3!=
17
6= 2,83333 · · ·
u4 =1
4!+
1
0!+
1
1!+
1
2!+
1
3!+
1
4!=
11
4= 2,75
2. Soit n un entier tel que : n Ê 1. On a : un+1 −un =1
(n+1)!+
1
(n+1)!−
1
n!=
2
(n+1)!−
n+1
(n+1)!=−
n−1
(n+1)!.
On a : −n−1
(n+1)!É 0 dès que n Ê 1 ; donc la suite (un ) est donc décroissante à partir de l’indice 1.
3. Les termes de la suite sont des sommes de nombres positifs, 0 est donc un minorant de la suite. La suite (un) estdécroissante à partir de l’indice 1 et minorée par 0, elle est donc convergente et sa limite vérifie : 0 É ℓ.Le plus grand des termes de la suite est u1, c’est-à-dire 3, donc : ℓÉ 3, d’où :
ℓ ∈ [0;3].
COROLLAIRE III.8.2 THÉORÈME DE DIVERGENCE D’UNE SUITE MONOTONE(1) Toute suite croissante et non convergente diverge vers +∞.(2) Toute suite décroissante et non convergente diverge vers −∞.
- série S
50 III. Suites numériques
Démonstration
(1) Soit (un )nÊn0 une suite croissante et non convergente.
Il suffit de démontrer que pour tout réel A, les termes de la suite sont tous plus grand que A à partir d’un certain indice.
D’après le théorème III.8.1, si (un ) était majorée elle serait convergente, mais ce n’est pas le cas donc elle n’est pas majorée.
Soit A un nombre réel ; A n’est pas un majorant de la suite, il existe donc un indice N tel que : uN > A. La suite est croissante, donc pour tout entier
n >N : un >A. la suite (un ) diverge donc vers +∞.
On démontre (2) de la même façon. äCOROLLAIRE III.8.3(1) Toute suite croissante et convergente a pour borne supérieure sa limite.(2) Toute suite décroissante et convergente a pour borne inférieure sa limite.
Démonstration
(1) Soit (un )nÊn0 une suite croissante et convergente. D’après le théorème III.7.1 (un ) est bornée et le résultat se déduit alors des théorèmes
III.8.1 et III.7.2.
On démontre (2) de la même façon. ä
III.8.2 Suites adjacentes
DÉFINITION III.8.1Deux suites (un )nÊn0 et (vn)nÊn0 sont dites adjacentes lorsqu’elles vérifient les trois propriétés suivantes.(1) L’une est croissante.(2) L’autre est décroissante.(3) lim
n→+∞
(
vn −un
)
= 0.
THÉORÈME III.8.4Deux suites adjacentes sont convergentes et ont la même limite.
DémonstrationSoit (un )nÊn0 et (vn )nÊn0 deux suites adjacentes. Quitte à les intervertir on peut supposer que (un ) est croissante et (vn ) est décroissante.Considérons la suite (wn ) définie par : wn = vn −un ; pour tout entier n Ê n0 on a :
wn+1 −wn = (vn+1 −un+1)− (vn −un ) =(
vn+1 −vn︸ ︷︷ ︸
négatif
)
−(
un+1 −un︸ ︷︷ ︸
positif
)
;
donc la suite (wn ) est décroissante, de plus elle converge vers 0 donc d’après le corollaire III.8.3 la suite (wn ) est positive ; la monotonie des suites(un ) et (vn ) nous permet alors d’en déduire que pour tout entier n Ê n0 :
un0 Éun É vn É vn0 .
La suite (un ) est croissante et majorée par vn0 elle est donc convergente, désignons par ℓ sa limite.
La suite (vn ) est décroissante et minorée par un0 elle est donc convergente, désignons par ℓ′ sa limite.
On a : ℓ′−ℓ= limn→+∞
vn − limn→+∞
un = limn→+∞
(vn −un
)= 0 ; les suites (un ) et (vn ) convergent donc vers la même limite. ä
III.8.3 Exercices résolus
Exercice III.8.2. 1. Étudier le sens de variation de la fonction f : x 7→ 3−2
x.
2. On considère la suite (un )n∈N définie par, u0 = 3, et pour tout nombre entier naturel, n : un+1 = f (un ).
a. Démontrer que tous les termes de la suite (un ) sont éléments de l’intervalle [1,3].
b. Étudier le sens de variation de la suite (un ).
3. Étudier la convergence de la suite (un ).
Solution 1. L’ensemble de définition de f est :R⋆.f est une fonction rationnelle, elle est donc dérivable sur son ensemble de définition et sa dérivée est la fonction, f ′,définie par :
f ′(x) =2
x2.
Un carré est toujours positif, donc : f ′ > 0 surR⋆.
La fonction f est strictement croissante sur ]−∞ ;0[ et sur ]0 ;+∞[.
2. a. Raisonnons par récurrence. Pour tout nombre entier naturel, n, désignons par Pn la proposition : « 1 É un É 3 ».
On a : u0 = 3 ; donc P0 est vraie.
LYCÉE PONTUS DE TYARD Terminale VI

III.9. Exercices 51
Soit n un nombre entier naturel pour lequel Pn est vraie. Démontrons Pn+1, c’est-à-dire : 1É un+1 É 3.D’après 1., la fonction f est strictement croissante sur ]0;+∞[, elle est donc en particulier croissante sur l’intervalle[1,3].Or, d’après l’hypothèse de récurrence : 1 É un É 3 ;donc : f (1) É f (un ) É f (3) ;
c’est-à-dire : 1 É un+1 É 3−2
3É 3.
Nous en déduisons par récurrence que :
tous les termes de la suite (un ) sont éléments de l’intervalle [1,3]
b. Nous avons : u0 = 3 et u1 = 3−2
3; donc : u1 É u0. Ce premier résultat préfigure peut-être une décroissance.
Raisonnons par récurrence. Pour tout nombre entier naturel, n, désignons par Pn la proposition : « 1 É un+1 É un É 3 ».
D’après le calcul ci-dessus et le résultat obtenu à la question précédente, P0 est vraie.
Soit n un nombre entier naturel pour lequel Pn est vraie. Démontrons Pn+1, c’est-à-dire : 1É un+1 É un+2 É 3.D’après 1., la fonction f est strictement croissante sur ]0;+∞[, elle est donc en particulier croissante sur l’intervalle[1,3].Or, d’après l’hypothèse de récurrence : 1 É un+1 É un É 3 ; donc : f (1) É f (un+1) É f (un ) É f (3) ;
c’est-à-dire : 1 É un+2 É un+1 É 3−2
3É 3.
Nous en déduisons par récurrence que pour tout nombre entier naturel, n : 1 É un+1 É un É 3 ; en particulier :
la suite (un ) est décroissante.
3. D’après 2.a. et 2.b. la suite un est décroissante et minorée par 1 :
La suite (un ) est convergente et sa limite est supérieur ou égale à 1.
III.8.4 Exercices
III.8.a. Démontrer que les suites (un )nÊ1 et (vn)nÊ1
définies par :
un =n∑
k=0
1
k!et vn = un +
1
n!
sont adjacentes.
III.8.b. On considère les suites (un )n∈N et (vn)n∈N défi-nies par :
u0 = 0
un+1 =un + vn
2et
v0 = 12
vn+1 =un +2vn
3
1. Démontrer que la suite (wn)n∈N définies par :wn = vn −un ; est une suite géométrique.
2. Démontrer que les suites (un ) et (vn) sont adjacentes.
3. a. Démontrer que la suite (tn )n∈N définies par :tn = 2un +3vn ; est une suite constante.
b. En déduire la limite commune des suites (un ) et (vn).
4. Exprimer explicitement, pour tout entier naturel n, un
et vn en fonction de n.
III.9 Exercices
III.1. 1. Le plan est muni d’un repère orthonormé (O;~ı ,~ )(unité graphique : 2cm). On considère la fonction f : x 7→4x −6
x −1.
a. Préciser l’ensemble de définition, D f , de la fonctionf .
b. Déterminer deux nombres réels a et b tels que pourtout élément, x, de D f :
4x −6
x −1= a +
b
x −1.
c. Étudier les variations de f .
d. Déterminer les points fixes de f .
e. Déterminer l’équation réduite de la tangente à C f aupoint d’abscisse 3.
f. Tracer C f .
2. Représenter sur le graphique établi en 1.f. les quatrepremiers termes de la suite (un ) vérifiant, u0 = 7, et pourtout entier naturel non nul, n : un = f (un−1).Conjecturer la limite éventuelle de la suite (un).
- série S
52 III. Suites numériques
III.2. Suite de FibonacciLa suite de Fibonacci est la suite (un )n∈N définie par :u0 = 0 ; u1 = 1 et pour tout n ∈N⋆,un+1 = un +un−1.On se propose de déterminer une expression explicite duterme général de la suite.
1. Donner les dix premiers termes de la suite.
2. (an) et (bn) sont deux suites géométriques de premierterme : a0 = b0 = 1. La raison de (an) est positive et cellede (bn) est négative. Elles vérifient pour tout n ∈ N⋆ :an+1 = an +an−1 et bn+1 = bn +bn−1.
a. Démontrer que les raisons des suites (an ) et (bn) sontles solutions de l’équation :
q2 = q +1 (E)
b. En déduire les expressions explicites des suites (an)et (bn).
3. Déterminer le couple (α,β) de nombres réels solution
du système :
αa0 +βb0 = u0
αa1 +βb1 = u1.
4. On considère la suite (vn)n∈N définie par :vn = αan +βbn .Démontrer que pour tout n ∈N⋆ : vn+1 = vn + vn−1
5. Conclure.
Sujets de Baccalauréat
III.3. Les deux questions de cet exercice sont indépen-dantes.
1. On considère la suite (un ) définie par :
u0 = 1 et, pour tout nombre entier naturel n, un+1 =1
3un+4.
On pose, pour tout nombre entier naturel n, vn = un −6.
a. Pour tout nombre entier naturel n, calculer vn+1 enfonction de vn . Quelle est la nature de la suite (vn) ?
b. Démontrer que pour tout nombre entier naturel n,
un =−5
(1
3
)n
+6
c. Étudier la convergence de la suite (un ).
2. On considère la suite (wn) dont les termes vérifient,pour tout nombre entier n Ê 1 :
nwn = (n+1)wn−1 +1 et w0 = 1.
Le tableau suivant donne les dix premiers termes de cettesuite.
w0 w1 w2 w3 w4 w5 w6 w7 w8 w9
1 3 5 7 9 11 13 15 17 19
a. Détailler le calcul permettant d’obtenir w10.
b. Dans cette question toute trace de recherche, même
incomplète, ou d’initiative même non fructueuse, sera
prise en compte dans l’évaluation.
Donner la nature de la suite (wn). Calculer w2009.
D’après France juin 2009
LYCÉE PONTUS DE TYARD Terminale VI

Chapitre IV
Limites de fonctions, continuité
IV.1 Limite finie (ou réelle)
IV.1.1 Limite d’une fonction en +∞Dans toute la suite de ce chapitre, lorsqu’une fonction f sera envisagée Df désignera son ensemble de définition
et Cf sa représentation graphique.
DÉFINITION IV.1.1Dire qu’un réel l est limite d’une fonction f en +∞ signifie que tout intervalle ouvert contenant l contient toutes lesvaleurs de f (x) dès que x est plus grand qu’un certain réel A.
Remarques1. On écrit alors : lim
x→+∞f (x) = l ou lim
+∞f = l .
2. Cette définition signifie que la distance entre f (x) et l est aussi petite qu’on le souhaite dès que x est suffisammentgrand.3. On définit de même la limite de f en −∞ en remplaçant « dès que x est plus grand qu’un certain réel A » par « dèsque x est plus petit qu’un certain réel A ».
THÉORÈME IV.1.1
Les fonctions f : x 7→1
x; g : x 7→
1
x2; h : x 7→
1
x3; k : x 7→
1p
x;
ont pour limite 0 en +∞.
Démonstration Soit ]a ;b[ un intervalle contenant 0 et A un réel strictement plus grand que1
b2et que 1.
Pour tout réel x ÊA, on a :
⋄1
x3É
1
x2É
1
xÉ
1p
x, car : 0 <
1
xÉ 1 ;
⋄ x >1
b2; donc :
px >
1
b(car x 7→
px est strictement croissante) ; d’où :
1p
x< b (car x 7→
1
xest strictement décroissante sur ]0;+∞[) ;
c’est-à-dire : k(x) < b ;⋄ donc finalement : a < 0 <h(x) É g (x) É f (x) É k(x) < b.
Dès que x est plus grand que A, f (x), g (x), h(x) et k(x) sont dans l’intervalle ]a ;b[ ; donc :
limx→+∞
1
x= lim
x→+∞1
x2= lim
x→+∞1
x3= lim
x→+∞1p
x= 0
ä
Remarque De même : limx→−∞
1
x= lim
x→−∞1
x2= lim
x→−∞1
x3= 0
Interprétation graphique
IV.1.2 Limite d’une fonction en un réel a
IV.2 Notion de continuité
IV.3 Utilisation de la continuité
IV.3.1 Continuité et bijection
Dans cette partie le repère (O;~ı ,~ ) est orthonormé.
53
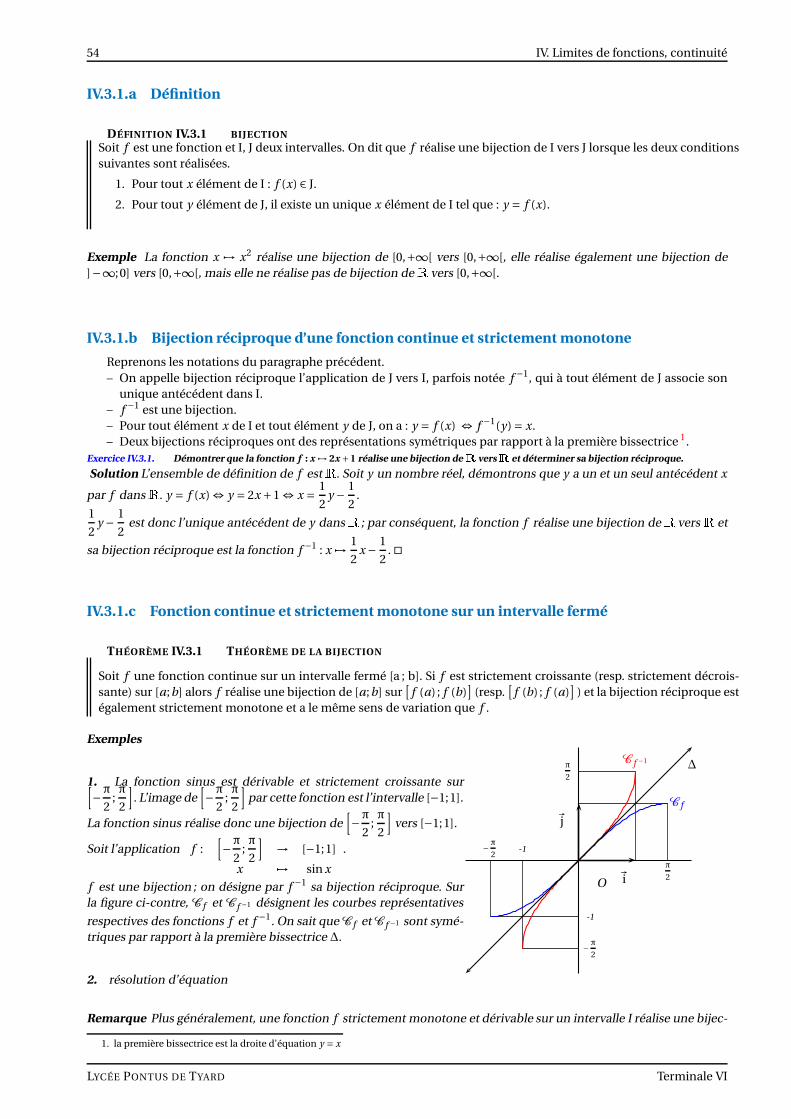
54 IV. Limites de fonctions, continuité
IV.3.1.a Définition
DÉFINITION IV.3.1 BIJECTIONSoit f est une fonction et I, J deux intervalles. On dit que f réalise une bijection de I vers J lorsque les deux conditionssuivantes sont réalisées.
1. Pour tout x élément de I : f (x) ∈ J.
2. Pour tout y élément de J, il existe un unique x élément de I tel que : y = f (x).
Exemple La fonction x 7→ x2 réalise une bijection de [0,+∞[ vers [0,+∞[, elle réalise également une bijection de]−∞;0] vers [0,+∞[, mais elle ne réalise pas de bijection deR vers [0,+∞[.
IV.3.1.b Bijection réciproque d’une fonction continue et strictement monotone
Reprenons les notations du paragraphe précédent.– On appelle bijection réciproque l’application de J vers I, parfois notée f −1, qui à tout élément de J associe son
unique antécédent dans I.– f −1 est une bijection.– Pour tout élément x de I et tout élément y de J, on a : y = f (x) ⇔ f −1(y)= x.– Deux bijections réciproques ont des représentations symétriques par rapport à la première bissectrice 1.
Exercice IV.3.1. Démontrer que la fonction f : x 7→ 2x +1 réalise une bijection deR versR et déterminer sa bijection réciproque.
Solution L’ensemble de définition de f estR. Soit y un nombre réel, démontrons que y a un et un seul antécédent x
par f dansR. y = f (x) ⇔ y = 2x +1 ⇔ x =1
2y −
1
2.
1
2y −
1
2est donc l’unique antécédent de y dansR ; par conséquent, la fonction f réalise une bijection deR versR et
sa bijection réciproque est la fonction f −1 : x 7→1
2x −
1
2.
IV.3.1.c Fonction continue et strictement monotone sur un intervalle fermé
THÉORÈME IV.3.1 THÉORÈME DE LA BIJECTION
Soit f une fonction continue sur un intervalle fermé [a ; b]. Si f est strictement croissante (resp. strictement décrois-sante) sur [a;b] alors f réalise une bijection de [a;b] sur
[
f (a) ; f (b)]
(resp.[
f (b) ; f (a)]
) et la bijection réciproque estégalement strictement monotone et a le même sens de variation que f .
Exemples
1. La fonction sinus est dérivable et strictement croissante sur[
−π
2;π
2
]
. L’image de[
−π
2;π
2
]
par cette fonction est l’intervalle [−1;1].
La fonction sinus réalise donc une bijection de[
−π
2;π
2
]
vers [−1;1].
Soit l’application f :[
−π
2;π
2
]
→ [−1;1]
x 7→ sin x
.
f est une bijection ; on désigne par f −1 sa bijection réciproque. Surla figure ci-contre, C f et C f −1 désignent les courbes représentatives
respectives des fonctions f et f −1. On sait que C f et C f −1 sont symé-triques par rapport à la première bissectrice ∆.
~i
~j
O
C f
C f −1π
2
−π
2
π
2
−π
2-1
-1
∆
2. résolution d’équation
Remarque Plus généralement, une fonction f strictement monotone et dérivable sur un intervalle I réalise une bijec-
1. la première bissectrice est la droite d’équation y = x
LYCÉE PONTUS DE TYARD Terminale VI
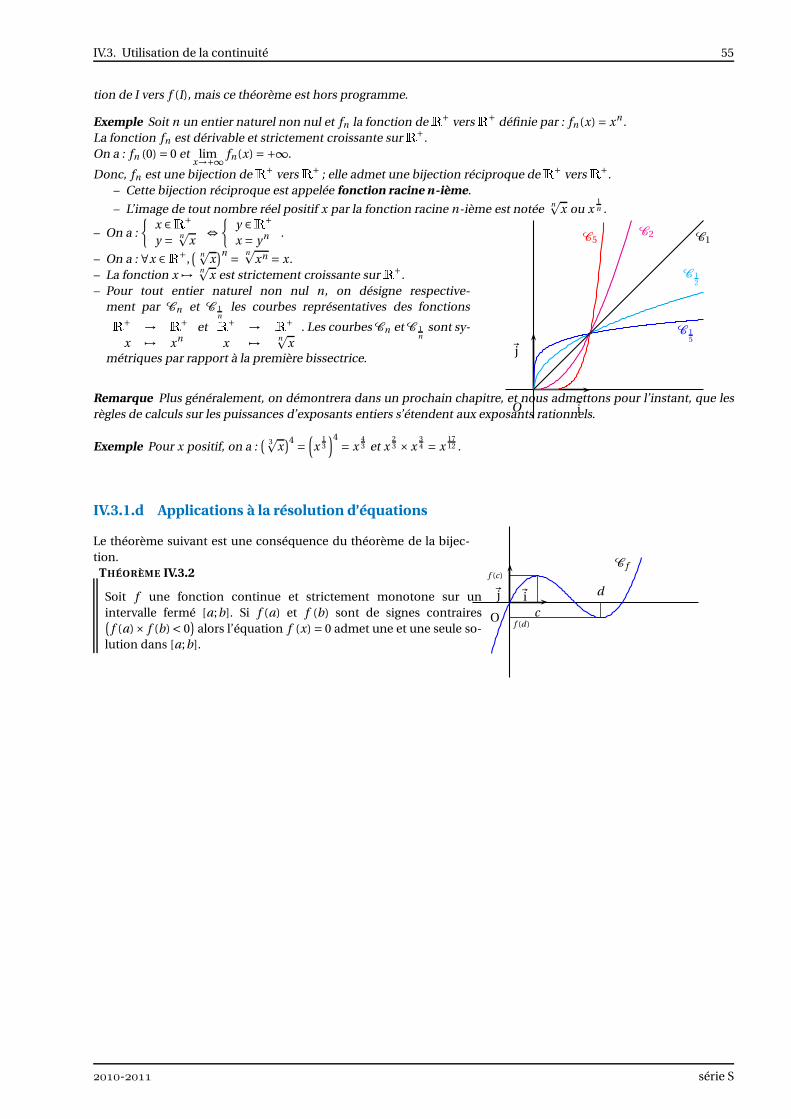
IV.3. Utilisation de la continuité 55
tion de I vers f (I), mais ce théorème est hors programme.
Exemple Soit n un entier naturel non nul et fn la fonction deR+ versR+ définie par : fn (x) = xn .La fonction fn est dérivable et strictement croissante surR+.On a : fn (0) = 0 et lim
x→+∞fn(x) =+∞.
Donc, fn est une bijection deR+ versR+ ; elle admet une bijection réciproque deR+ versR+.– Cette bijection réciproque est appelée fonction racine n-ième.
– L’image de tout nombre réel positif x par la fonction racine n-ième est notée npx ou x
1n .
– On a :
x ∈R+
y = npx
⇔
y ∈R+
x = yn .
– On a : ∀x ∈R+,(
npx)n = np
xn = x.– La fonction x 7→ np
x est strictement croissante surR+.– Pour tout entier naturel non nul n, on désigne respective-
ment par Cn et C 1n
les courbes représentatives des fonctionsR+ → R+
x 7→ xnet R+ → R+
x 7→ npx
. Les courbes Cn et C 1n
sont sy-
métriques par rapport à la première bissectrice.
~i
~j
O
C5C2
C 15
C 12
C1
Remarque Plus généralement, on démontrera dans un prochain chapitre, et nous admettons pour l’instant, que lesrègles de calculs sur les puissances d’exposants entiers s’étendent aux exposants rationnels.
Exemple Pour x positif, on a :( 3p
x)4 =
(
x13
)4= x
43 et x
23 × x
34 = x
1712 .
IV.3.1.d Applications à la résolution d’équations
Le théorème suivant est une conséquence du théorème de la bijec-tion.
THÉORÈME IV.3.2
Soit f une fonction continue et strictement monotone sur unintervalle fermé [a;b]. Si f (a) et f (b) sont de signes contraires(
f (a)× f (b)< 0)
alors l’équation f (x) = 0 admet une et une seule so-lution dans [a;b].
~i~j
O
C ff (c)
f (d )c
d
- série S
56 IV. Limites de fonctions, continuité
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre V
Exponentielles et équations différentielles
L’objectif de ce chapitre est d’introduire la fonction exponentielle, d’établir les principales propriétés de cette fonc-tion et les théorèmes de résolutions d’équations différentielles.
V.1 La fonction exponentielle de base e
V.1.1 Propriété fondamentale
L’activité sur la méthode d’Euler nous conduit à conjecturer et nous admettons momentanément l’existence d’unefonction définie et dérivable surR vérifiant les contraintes suivantes (l’existence d’une telle fonction sera établie § ??).
f ′ = f et f (0) = 1 (V.1)
Nous désignerons par exp cette fonction. Le principal objectif de ce paragraphe est d’établir la propriété fondamentalde la fonction exp (elle transforme les sommes en produit) et de démontrer que la fonction exp est l’unique fonctiondérivable surR vérifiant (V.1). La fonction exp est une fonction usuelle, elle est disponible dans toutes les calculatricesscientifiques. Pour tout nombre réel x, lorsqu’il n’y a pas d’ambiguïté, exp(x) peut aussi être noté : exp x.
Remarque Le nombre e, défini par : e = exp1 ; est une constante mathématique fondamentale.
Exemple Vérifier à la calculatrice que : exp0 = 1 et e= 2,7182818 · · · .
THÉORÈME V.1.1
(1) Pour tout nombre réel x : exp−x =1
exp x.
(2) Pour tous nombres réels a et b : exp(a +b)=(
exp a)(
expb)
Démonstration Soit a ∈R et b ∈R. Considérons la fonction fa : x 7→ exp(a+x)exp(−x). fa est définie et dérivable surR et sa dérivée vérifie pourtout x ∈R : f ′a (x) = exp(a +x)exp(−x)−exp(a +x)exp(−x) = 0 ;donc la fonction fa est constante ; or : fa (0) = expa donc pour tout x ∈R :
exp(a +x)exp(−x) = exp a (V.2)
(1) En particulier pour a = 0, on obtient : exp(x)exp(−x) = 1 ; donc pour tout réel x : exp(−x) =1
expx.
(2) Pour x = b dans (V.2), il vient : exp(a +b)exp(−b) = expa, en multipliant membre par expb, on en déduit l’identité désirée. äRemarques1. Ce théorème signifie que exp transforme les sommes en produits.2. Plus généralement, on démontre par récurrence que pour tous nombres réels a1, · · · , an on a :exp(a1 +·· ·+an) = (exp a1)× (exp a2)×·· ·× (exp an).
3. Soit x ∈R. On déduit de (1) que : exp x , 0. On déduit de (2) que : exp x =(
expx
2
)2; donc : exp x Ê 0.
On en déduit que pour tout réel x : exp x > 0.
COROLLAIRE V.1.2La fonction exp est l’unique fonction définie et dérivable surR vérifiant :f ′ = f et f (0) = 1.
Démonstration Soit f une fonction, solution de problème. Démontrons que : f = exp.
Considérons la fonction g définie par : g =f
exp. La fonction g , quotient de deux fonctions dérivables surR et dont le dénominateur est toujours
non nul, est dérivable surR et sa dérivée est définie par :
g ′ =exp′× f − f ′×exp
exp2=
exp× f − f ×exp
exp2= 0.
57

58 V. Exponentielles et équations différentielles
Par conséquent la fonction g est constante surR. De plus : g (0) =f (0)
exp0= 1 ; donc pour tout réel x : g (x) = 1. D’où il vient : f = exp. ä
V.1.2 Sens de variation
La fonction exp est strictement positive surR et est sa propre dérivée, on en déduit le théorème suivant.
THÉORÈME V.1.3La fonction exp est strictement croissante surR.
COROLLAIRE V.1.4Pour tous nombres réels a et b, on a :(1) a < b équivaut à ea < eb ;(2) a É b équivaut à ea É eb ;(3) a = b équivaut à ea = eb ;
Démonstration Soit a et b deux réels.
(1) D’après le théorème V.1.3, on a : a < b =⇒ ea < eb et b É a =⇒ eb É ea .
La dernière implication a pour contraposée : a < b ⇐= ea < eb ; on a donc : a < b ⇐⇒ ea < eb .
(2) D’après (1) : b < a ⇐⇒ eb < ea . Donc, par contraposée : a É b ⇐⇒ ea É eb .
(3) On en déduit que : a = b ⇐⇒
a É b
b É a⇐⇒
ea É eb
eb É ea ⇐⇒ ea = eb .ä
V.1.3 Autres propriétés algébriques de l’exponentielle
Nous savons que fonction exp transforme les sommes en produits. Dans ce paragraphe nous allons établir les im-plications algébriques de cette propriété.
THÉORÈME V.1.5Pour tous réels a et b, tout entier m, tout entier naturel non nul n et tout nombre rationnel r .
(1) exp(a −b)=exp a
expb
(2) exp(ma)= expm a
(3) np
exp a = expa
n(4) exp(r a)= expr a
Démonstration Soit a et b deux réels, m un entier, n un entier naturel non nul et r un nombre rationnel.
(1) exp(a −b) = exp a ×exp(−b) = expa ×1
expb=
exp a
expb(2) Si m = 0 ou m = 1, la propriété est immédiate.
Pour m Ê 2 : exp(ma) = exp(a +··· +a︸ ︷︷ ︸
m termes
) = exp a ×···×exp a︸ ︷︷ ︸
m facteurs
= expm a.
Pour m É−1 : on a −m Ê 1 et donc : exp(ma) = exp(−m(−a)) = exp−m (−a) =(
1
exp a
)−m
= expm a.
(3) On a :(
expa
n
)n= exp
(
na
n
)
= exp a ; donc : npexp a = expa
n
(4) Il existe p ∈Z et q ∈N∗ tels que : r =p
q.
Donc : exp(r a) = exp
(p
qa
)
=(
exp(pa)) 1
q =((
exp a)p ) 1
q = expr a ä
Remarque Les propriétés (1) (pour r = 1), (3) (pour r ∈Z) et (4) (pour1
r∈N∗) sont des cas particuliers de la propriété
(5).
ConventionÉtant donné un nombre réel a, on décide d’étendre par continuité la fonction x 7→ expx a, initialement définie surQ. Ainsi, pour tout réel x : expx a = exp(xa).
En particulier, lorsque a = 1, pour tout réel x : exp x = ex .Désormais, exp x sera de préférence noté : ex .
V.1.4 Quelques limites
V.1.4.a Limites aux bornes
THÉORÈME V.1.6
LYCÉE PONTUS DE TYARD Terminale VI
V.2. La fonction logarithme népérien 59
limx→+∞
ex =+∞ limx→−∞
ex = 0.
Démonstration La suite (un ) de terme général : un = en ; est la suite géométrique de raison e (exp est strictement croissante donc : e0 < e1 ; c’est-à-dire : e> 1) et de premier terme 1 (1 > 0) donc : lim
n→+∞un =+∞.
Soit A∈R. Il existe un entier naturel N tel que : uN > A ; donc pour tout x >N, on a : ex > eN >A.Ce qui signifie, par définition, que : lim
x→+∞ex =+∞.
Posons : u =−x. On a : limx→−∞−x =+∞ et lim
u→+∞1
eu= 0 ;
donc par composition : limx→−∞
1
e−x= 0 ; c’est-à-dire : lim
x→−∞ex = 0. ä
V.1.4.b Nombre dérivé en 0
La fonction exp est dérivable en 0 et son nombre dérivé en 0 est e0. On en déduit le théorème suivant.
THÉORÈME V.1.7
limx→0
ex −1
x= 1.
V.1.4.c Croissance comparée de x et exp
Le théorème suivant signifie que ex tend plus vite que x vers +∞ quand x tend vers +∞ et que ex tend plus vitevers 0 que x vers −∞ quand x tend vers −∞.
THÉORÈME V.1.8
limx→+∞
ex
x=+∞ lim
x→−∞x ex = 0.
Démonstration Introduisons la fonction f : x 7→ ex −x2
2; f est dérivable surR et sa dérivée est la fonction f ′ : x 7→ ex −x ; f ′ est dérivable surR et
sa dérivée est la fonction f ′′ : x 7→ ex −1.La fonction exp est croissante surR, donc pour tout réel positif x, on a : ex Ê e0 ; c’est-à-dire : ex Ê 1.La fonction f ′′ est donc positive sur [0;+∞[ on en déduit que la fonction f ′ est croissante sur [0;+∞[.Donc pour tout réel positif x : f ′(x) Ê f ′(0) ; c’est-à-dire : f ′(x) Ê 1.La fonction f ′ est donc positive sur [0;+∞[ on en déduit que la fonction f est croissante sur [0;+∞[.
Donc pour tout réel strictement positif x : f (x) Ê f (0) ; c’est-à-dire : ex −x2
2Ê 1 ; d’où : ex Ê
x2
2+1 Ê
x2
2; puis :
ex
xÊ
x
2(car x > 0).
On sait que : limx→+∞
x
2=+∞ ; donc par comparaison : lim
x→+∞ex
x=+∞
Posons u =−x. Il vient : x ex =−u e−u =−u
eu.
On a : limx→−∞−x =+∞ et par quotient lim
u→+∞−
u
eu= 0 ; donc par composition : lim
x→−∞x ex = 0. ä
Exercice V.1.1. Étudier la limite en +∞ de x 7→ex
x +1.
Solution Pour tout réel x > 0 :ex
x +1=
ex
x
x
x +1=
ex
x×
1
1+ 1x
.
On a : limx→+∞
1
x= 0 et lim
u→0
1
1+u= 1 ; donc : lim
x→+∞x
x +1= 1 ;
de plus : limx→+∞
ex
x=+∞ ; donc par produit : lim
x→+∞ex
x +1=+∞.
V.2 La fonction logarithme népérien
V.2.1 Introduction
La fonction exp est continue et strictement croissante surR ; de plus : limx→−∞
ex = 0 et limx→+∞
ex =+∞ ;
donc exp est une bijection deR vers ]0;+∞[.
DÉFINITION V.2.1La fonction logarithme népérien 1, notée ln, est la bijection réciproque de la fonction exp.
Sur la figure V.1 sont tracées les courbesCexp etCln d’équations respectives : y = ex et y = ln x ; ainsi que la tangente
1. John NEPER, baron de Merchiston, mathématicien écossais -
- série S
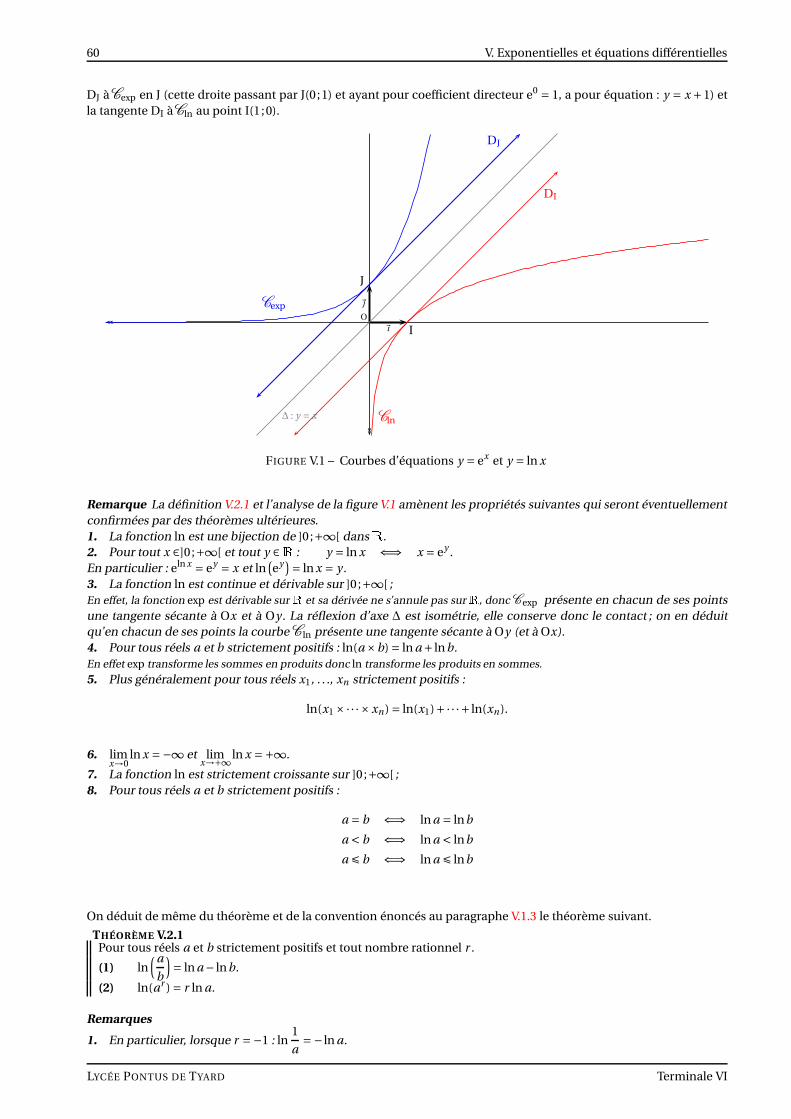
60 V. Exponentielles et équations différentielles
DJ àCexp en J (cette droite passant par J(0;1) et ayant pour coefficient directeur e0 = 1, a pour équation : y = x +1) etla tangente DI àCln au point I(1;0).
~ı
~
O
I
J
DI
DJ
Cln
Cexp
∆ : y = x
FIGURE V.1 – Courbes d’équations y = ex et y = ln x
Remarque La définition V.2.1 et l’analyse de la figure V.1 amènent les propriétés suivantes qui seront éventuellementconfirmées par des théorèmes ultérieures.1. La fonction ln est une bijection de ]0;+∞[ dansR.2. Pour tout x ∈]0;+∞[ et tout y ∈R : y = ln x ⇐⇒ x = ey .En particulier : eln x = ey = x et ln
(
ey)
= ln x = y .3. La fonction ln est continue et dérivable sur ]0;+∞[ ;En effet, la fonction exp est dérivable surR et sa dérivée ne s’annule pas surR, donc Cexp présente en chacun de ses pointsune tangente sécante à Ox et à Oy . La réflexion d’axe ∆ est isométrie, elle conserve donc le contact ; on en déduitqu’en chacun de ses points la courbe Cln présente une tangente sécante à Oy (et à Ox).4. Pour tous réels a et b strictement positifs : ln(a ×b) = ln a + ln b.En effet exp transforme les sommes en produits donc ln transforme les produits en sommes.
5. Plus généralement pour tous réels x1, . . ., xn strictement positifs :
ln(x1 ×·· ·× xn ) = ln(x1)+·· ·+ ln(xn ).
6. limx→0
ln x =−∞ et limx→+∞
ln x =+∞.
7. La fonction ln est strictement croissante sur ]0;+∞[ ;8. Pour tous réels a et b strictement positifs :
a = b ⇐⇒ ln a = lnb
a < b ⇐⇒ ln a < lnb
a É b ⇐⇒ ln a É lnb
On déduit de même du théorème et de la convention énoncés au paragraphe V.1.3 le théorème suivant.
THÉORÈME V.2.1Pour tous réels a et b strictement positifs et tout nombre rationnel r .
(1) ln( a
b
)
= ln a − ln b.
(2) ln(ar ) = r ln a.
Remarques
1. En particulier, lorsque r =−1 : ln1
a=− ln a.
LYCÉE PONTUS DE TYARD Terminale VI

V.2. La fonction logarithme népérien 61
2. On déduit de (2) que : ar = exp(ln(ar )) = er ln a
V.2.2 Dérivabilité
Le théorème suivant exprime que la fonction ln est dérivable en 1 et que son nombre dérivé en 1 et 1.
THÉORÈME V.2.2
limx→1
ln x
x −1= 1 et lim
h→0
ln(1+h)
h= 1.
Démonstration D’après le résultat obtenu dans l’exercice VIII.6.1., pour, x = y et x = −y , on a pour tout réel, y : ey Ê y +1 et e−y Ê −y +1. On endéduit que pour y ∈R,
1−1
ey É y É ey −1.
En posant, x = ey ( on a donc y = ln x), on en déduit que pour tout nombre réel, x, strictement positif, 1−1
xÉ ln x É x −1, c’est-à-dire :
x −1
xÉ ln x É x −1.
En divisant membre à membre par, x −1, dont le signe est déterminé par la position de x par rapport à 1, on en déduit que :
– si x < 1 alors :1
xÊ
ln x
x −1Ê 1 ;
– si x > 1 alors :1
xÉ
ln x
x −1É 1.
Par continuité de la fonction inverse, limx→1
1
x= 1, donc par comparaison des limites : lim
x→1x<1
ln x
x −1= lim
x→1x>1
ln x
x −1= 1 ; c’est-à-dire : lim
x→1
ln x
x −1= 1.
Posons : h = x −1. On a donc : x =h+1 ;ln x
x −1=
ln(h+1)
het lim
h→0(h+1) = 1. Par composition des limites, on en déduit que : lim
h→0
ln(1+h)
h= 1. ä
Remarque Ce théorème se lit sur la figure V.1, il exprime que la tangente à Cln en I, DI, a pour coefficient directeur 1.
THÉORÈME V.2.3
La fonction ln est dérivable sur ]0;+∞[ et sa dérivée est la fonction x 7→1
x.
Démonstration Soit, a, un nombre réel strictement positif. Déterminons le nombre dérivé de ln en a. Désignons, pour tout nombre réel x stricte-
ment positif et distinct de a, par θx le taux de variation de ln et a et x. On a : θx =ln x − ln a
x −a=
ln xa
a(
xa −1
) .
Posons : u =x
a. On a : lim
x→a
x
a= 1 et lim
x→1
ln x
x −1= 1 ; donc par composition : lim
x→a
ln xa
xa −1
= 1. Puis par quotient par a : limx→a
θx =1
a.
Ainsi la fonction est continue et dérivable en a et son nombre dérivé en a est 1. On en déduit le théorème. äRemarques
1. On pouvait aller plus vite en utilisant la dérivabilité de ln. En dérivant membre à membre l’identité, eln x = x, il
vient : (ln x)′ eln x = 1. D’où l’on tire : (ln x)′ =1
x.
2. La dérivabilité de ln sur ]0;+∞[ établit la continuité de ln sur ce même intervalle.
V.2.3 Dérivée de ln u
THÉORÈME V.2.4Soit u une fonction dérivable et strictement positive sur un intervalle I.
La fonction lnu est dérivable sur I et sa dérivée est :u′
u.
Exemple La dérivée surR de 7→ ln(
x2 +1)
est x 7→2x
x2 +1.
- série S

62 V. Exponentielles et équations différentielles
V.2.4 Logarithme népérien et calcul intégral
THÉORÈME V.2.5Pour tout nombre réel strictement positif, x :
ln x =∫x
1
d t
t.
THÉORÈME V.2.6Soit u une fonction continûment dérivable sur un intervalle I.
La fonctionu′
ua pour primitive sur I : ln |u|.
V.3 Des exponentielles et des logarithmes
V.3.1 Notation ab , pour a, b réels et a > 0
DÉFINITION V.3.1Pour tout nombre réel a > 0 et tout nombre réel b, on note ab le nombre eb ln a
Remarques
1. On en déduit que : ln(
ab)
= ln(
eb ln a)
= b ln a.
2. Cette définition est en accord avec les précédentes définitions de ab lorsque a > 0.
Exemple Vérifier à la calculatrice que : πp
2 = ep
2lnπ.
THÉORÈME V.3.1Pour tous nombres réels a > 0 et a′ > 0 et tous nombres réels b et b′ :(1) 1b = 1 ;
(2) ab ab′= ab+b′
;ab
ab′ = ab−b′; (ab)b′
= abb′;
(3) (aa′)b = ab a′b ;ab
a′b =( a
a′
)b.
DémonstrationSoit a, a′, b, b′ quatre réels tels que : a > 0 et a′ > 0 ; on a :
(1) On a : 1b = eb ln1 = e0 = 1 ;
(2) On a : ab ab′= eb ln a eb′ ln a = e(b+b′) ln a = ab+b′
.
On démontre de même les autres identités. ä
V.3.2 Fonctions exponentielles de base a (avec a > 0)
V.3.2.a Définition
DÉFINITIONS V.3.2(1) Une fonction exponentielle est une fonction continue f deR versR+⋆ qui vérifie pour tous réels x et x′ :
f (x + x′) = f (x)× f (x′). (V.3)
(2) Le nombre strictement positif, f (1), est appelé base de l’exponentielle.
Exemple La fonction exp est une exponentielle de base e.
THÉORÈME V.3.2Soit a un nombre réel (avec a > 0). Il existe une unique fonction exponentielle de base a.
Démonstration
LYCÉE PONTUS DE TYARD Terminale VI
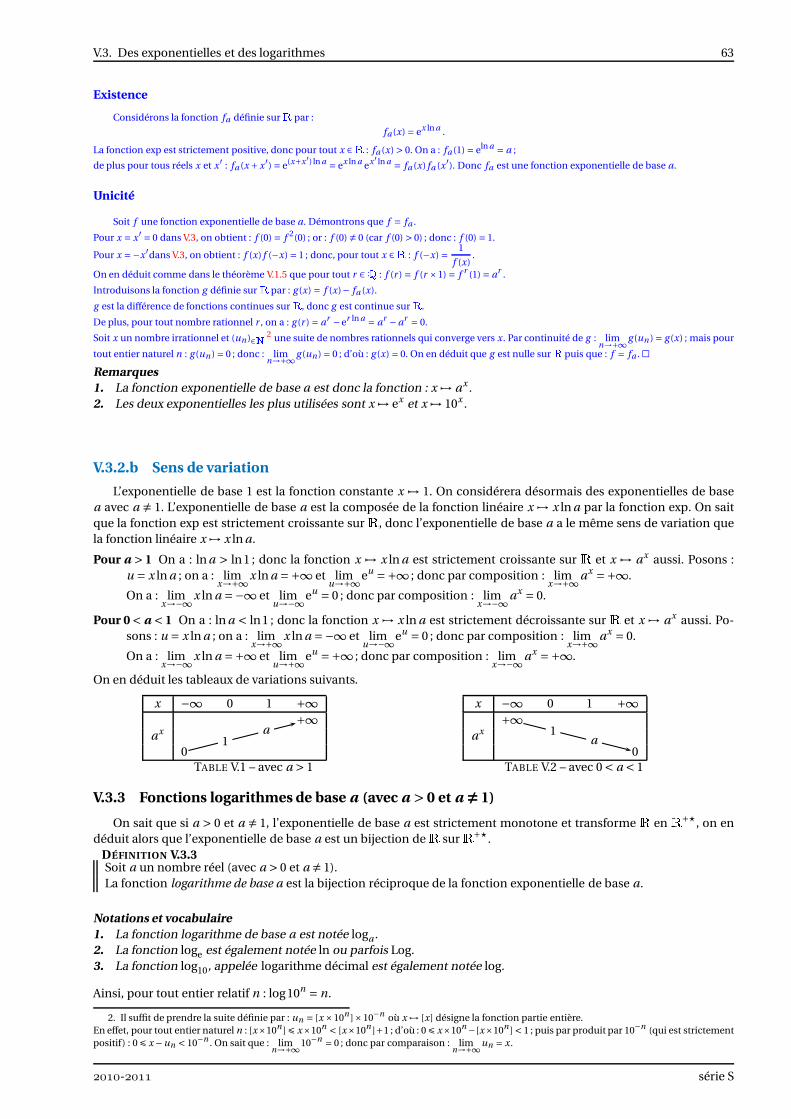
V.3. Des exponentielles et des logarithmes 63
Existence
Considérons la fonction fa définie surR par :
fa (x) = ex ln a .
La fonction exp est strictement positive, donc pour tout x ∈R : fa (x) > 0. On a : fa (1) = eln a = a ;
de plus pour tous réels x et x′ : fa (x +x′) = e(x+x ′) ln a = ex ln a ex ′ ln a = fa (x) fa (x′). Donc fa est une fonction exponentielle de base a.
Unicité
Soit f une fonction exponentielle de base a. Démontrons que f = fa .
Pour x = x′ = 0 dans V.3, on obtient : f (0) = f 2(0) ; or : f (0), 0 (car f (0) > 0) ; donc : f (0) = 1.
Pour x =−x′dans V.3, on obtient : f (x) f (−x) = 1 ; donc, pour tout x ∈R : f (−x) =1
f (x).
On en déduit comme dans le théorème V.1.5 que pour tout r ∈Q : f (r ) = f (r ×1) = f r (1) = ar .
Introduisons la fonction g définie surR par : g (x) = f (x)− fa (x).
g est la différence de fonctions continues surR, donc g est continue surR.
De plus, pour tout nombre rationnel r , on a : g (r ) = ar −er ln a = ar −ar = 0.
Soit x un nombre irrationnel et (un )∈N 2 une suite de nombres rationnels qui converge vers x. Par continuité de g : limn→+∞
g (un ) = g (x) ; mais pour
tout entier naturel n : g (un ) = 0 ; donc : limn→+∞
g (un ) = 0 ; d’où : g (x) = 0. On en déduit que g est nulle surR puis que : f = fa . ä
Remarques1. La fonction exponentielle de base a est donc la fonction : x 7→ ax .2. Les deux exponentielles les plus utilisées sont x 7→ ex et x 7→ 10x .
V.3.2.b Sens de variation
L’exponentielle de base 1 est la fonction constante x 7→ 1. On considérera désormais des exponentielles de basea avec a , 1. L’exponentielle de base a est la composée de la fonction linéaire x 7→ x ln a par la fonction exp. On saitque la fonction exp est strictement croissante surR, donc l’exponentielle de base a a le même sens de variation quela fonction linéaire x 7→ x ln a.
Pour a > 1 On a : ln a > ln 1 ; donc la fonction x 7→ x ln a est strictement croissante sur R et x 7→ ax aussi. Posons :u = x ln a ; on a : lim
x→+∞x ln a =+∞ et lim
u→+∞eu =+∞ ; donc par composition : lim
x→+∞ax =+∞.
On a : limx→−∞
x ln a =−∞ et limu→−∞
eu = 0 ; donc par composition : limx→−∞
ax = 0.
Pour 0 < a < 1 On a : ln a < ln 1 ; donc la fonction x 7→ x ln a est strictement décroissante sur R et x 7→ ax aussi. Po-sons : u = x ln a ; on a : lim
x→+∞x ln a =−∞ et lim
u→−∞eu = 0 ; donc par composition : lim
x→+∞ax = 0.
On a : limx→−∞
x ln a =+∞ et limu→+∞
eu =+∞ ; donc par composition : limx→−∞
ax =+∞.
On en déduit les tableaux de variations suivants.
x −∞ 0 1 +∞+∞
ax
01
a
TABLE V.1 – avec a > 1
x −∞ 0 1 +∞+∞
ax
0
1a
TABLE V.2 – avec 0 < a < 1
V.3.3 Fonctions logarithmes de base a (avec a > 0 et a , 1)
On sait que si a > 0 et a , 1, l’exponentielle de base a est strictement monotone et transformeR enR+⋆, on endéduit alors que l’exponentielle de base a est un bijection deR surR+⋆.
DÉFINITION V.3.3Soit a un nombre réel (avec a > 0 et a , 1).La fonction logarithme de base a est la bijection réciproque de la fonction exponentielle de base a.
Notations et vocabulaire1. La fonction logarithme de base a est notée loga .2. La fonction loge est également notée ln ou parfois Log.3. La fonction log10, appelée logarithme décimal est également notée log.
Ainsi, pour tout entier relatif n : log 10n = n.
2. Il suffit de prendre la suite définie par : un = [x ×10n ]×10−n où x 7→ [x] désigne la fonction partie entière.En effet, pour tout entier naturel n : [x×10n ]É x×10n < [x×10n ]+1 ; d’où : 0 É x×10n −[x×10n ] < 1 ; puis par produit par 10−n (qui est strictementpositif) : 0 É x −un < 10−n . On sait que : lim
n→+∞10−n = 0 ; donc par comparaison : lim
n→+∞un = x.
- série S
64 V. Exponentielles et équations différentielles
~ı
~
O
C : y = loga x
C′
: y = ax
∆ : y = x
a
a
a > 1
~ı
~
O
C : y = loga x
C′
: y = ax
∆ : y = x
a
a
0 < a < 1
FIGURE V.2 – Courbes d’équations y = ax et y = loga x avec a = 2 puis a =1
2.
C’est tout l’intérêt de cette fonction log très utilisée en physique. c’est-à-dire Si x a pour écriture scientifique x =d ×10n où d est un nombre décimal compris entre 1 et 10 et n ∈Z, alors :log x = log(d ×10n ) = log d + log 10n = n+ log d .1 É d < 10 implique que 0 É logd < 1. Donc, n est la partie entière de log x et logd sa partie fractionnaire. Le nombren est appelé caractéristique de log x, logd est appelé mantisse de log x.
Exemples1. log150 = 2,176 · · · .On a : log150 = log(102 ×1,5) = 2+ log(1,5) = 2,176 · · · .La caractéristique de log 150 est 2 et sa mantisse est 0,176 · · · .2. On aimerait savoir combien il y a de chiffres dans 13128.On a : log
(
13128)= 128log 13 = 142,584 · · · ; donc 13128 est constitué de 143 chiffres.
Remarque Pour tout x ∈R+⋆ et tout y ∈R, on a : y = loga x ⇐⇒ x = ay .
THÉORÈME V.3.3Soit a un nombre réel (avec a > 0 et a , 1).
Pour tout réel x strictement positif : loga x =ln x
ln a.
Démonstration Posons : y = loga x ; on a donc : x = ay = ey ln a ; d’où : ln x = y ln a ; puis : y =ln x
ln a. ä
Exemple Calculer : log2 65536 ; log1000000 ; log3 729 et log7 343.
V.4 Équations différentielles
V.4.1 Introduction
Considérons les fonctions f : x 7→ e2x ; g : x 7→ sinωx avec ω ∈R⋆ et P : x 7→ 1+ x +x2
2+
x3
6+
x4
24.
– Calculer la dérivée de f et démontrer que pour tout réel x, on a : f ′(x)−2 f (x) = 0.– Calculer la dérivée secondeg ′′ de g et démontrer que pour tout réel x, on a :
g ′′(x)+ω2g (x) = 0.
– Calculer la dérivée de P et démontrer que pour tout réel x, on a : P′(x)−P(x) =−x4
24On a surR : f ′−2 f = 0. on dit que f est une solution de l’équation différentielle : y ′−2y = 0.De même g est solution de l’équation différentielle : y ′′+9y = 0.
P est solution de l’équation différentielle : y ′− y =−x4
24.
LYCÉE PONTUS DE TYARD Terminale VI

V.4. Équations différentielles 65
Notations et vocabulaire1. Une équation différentielle est une relation entre une fonction inconnue et ses dérivées successives.La fonction inconnue est souvent notée y et ses dérivées successives y ′, y ′′, . . .Le plus souvent, la variable sera notée x ou t .2. L’ ordre d’une équation différentielle est le plus grand ordre de dérivée intervenant dans cette équation. Par exemple :5y ′′−4y ′− y = 0 ; est une équation différentielle d’ordre 2.3. Une solution sur un intervalle ouvert I d’une équation différentielle est une fonction vérifiant l’équation sur l’in-tervalle. Par exemple, exp est une solution surR de l’équation différentielle : 5y ′′−4y ′− y = 0.4. Résoudre ou intégrer une équation différentielle sur un intervalle ouvert I c’est déterminer l’ensemble des solu-tions sur I de cet intervalle.5. Une courbe intégrale d’une équation différentielle est la courbe représentative d’une solution.
V.4.2 Équations du type y ′−a y = 0
Soit a un nombre réel. On se propose de résoudre, dans l’ensemble des fonctions dérivables surR, l’équation :
y ′−ay = 0 (V.4)
À toute fonction y dérivable surR, on associe la fonction z dérivable surR, définie par : z(x) = y(x)e−ax .On a donc : y(x) = z(x)eax et y ′(x) =
(
z ′(x)+az(x))
eax .On en déduit que, pour tout nombre réel x : (y ′−ay)(x)= z ′(x)eax .Par conséquent y est solution de (V.4) si et seulement si z ′ est la fonction nulle surR, c’est-à-dire si et seulement si z
est une fonction constante. On en déduit le théorème suivant.THÉORÈME V.4.1
Soit a un nombre réel. Les solutions surR de l’équation différentielle :
y ′−ay = 0
sont les fonctions de la forme,x 7→ k eax
où k est un nombre réel.
Exemple Les solutions surR de l’équation différentielle : y ′−2y = 0 ; sont les fonctions de la forme : x 7→ k e2x où k estun nombre réel. Les fonctions x 7→ e2x , x 7→ −e2x , x 7→ 5e2x et x 7→ 0 sont donc des solutions surR.
THÉORÈME V.4.2Soit a un nombre réel et (x0, y0) un couple de nombres réels.Il existe une et une seule solution f surR de l’équation différentielle : y ′−ay = 0 ; vérifiant : f (x0) = y0.
DémonstrationLes solutions de l’équation sont les fonctions fk : x 7→ k eax avec k ∈R.
fk (x0) = y0 ⇐⇒ k eax0 = y0 ⇐⇒ k = y0 e−ax0 .
La seule solution vérifiant la condition supplémentaire est donc : x 7→ y0 ea(x−x0). äExercice V.4.1. 1. Résoudre surR : y ′ = 3y .
2. Déterminer la solution dont la courbe intégrale passe par le point A(−2;−4)
Solution 1. Les solutions de l’équation différentielle sont les fonctions de la forme : x 7→ k e3x avec k ∈R.
2. La solution dont la courbe intégrale passe par le point A(−2;−4) est donc la fonction : x 7→ −4e3(x+2).
Interprétation géométrique
Le théorème V.4.2 signifie que les courbes intégrales de l’équation forment une partition 3 du plan : par tout pointA(x0, y0), il passe une courbe intégrale et une seule (cf. figure V.3). Les solutions de l’équation : y ′ = y ; sont les fonctionsx 7→ k ex où k ∈R.
3. Une partition d’un ensemble E est une famille de sous ensembles non vides de E, deux à deux disjoints, dont l’union est E
- série S
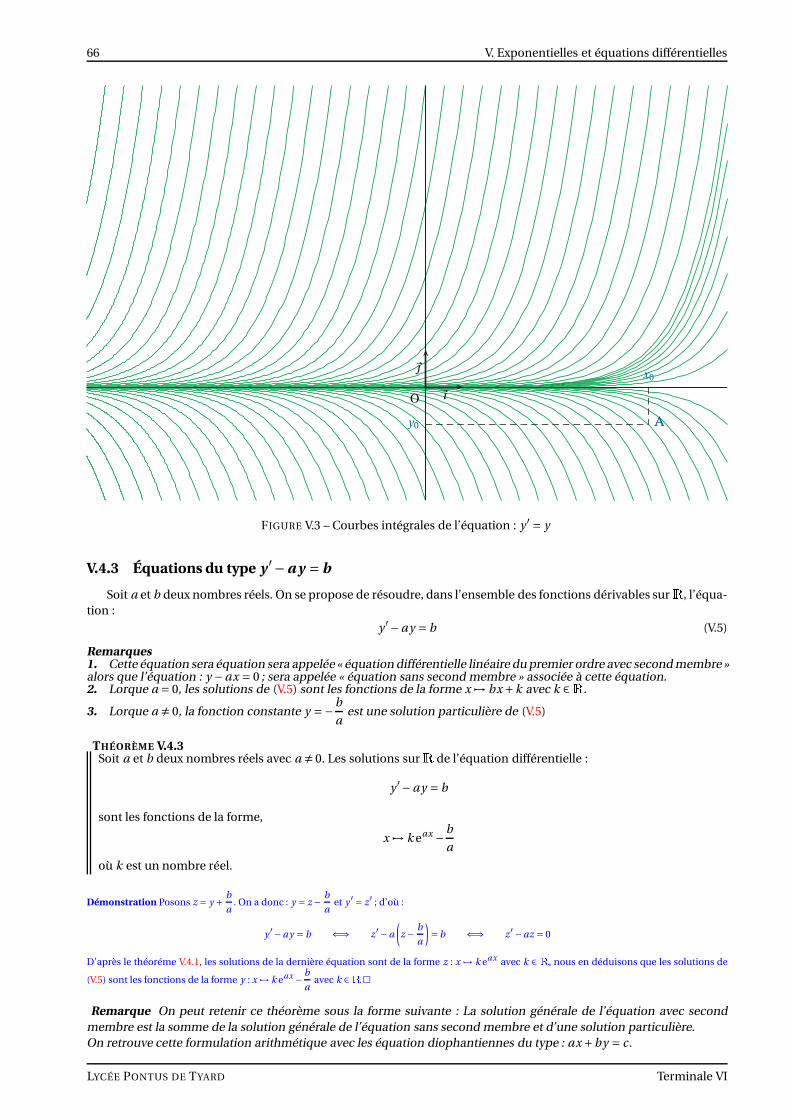
66 V. Exponentielles et équations différentielles
AA
O ~ı
~x0
y0
FIGURE V.3 – Courbes intégrales de l’équation : y ′ = y
V.4.3 Équations du type y ′−a y = b
Soit a et b deux nombres réels. On se propose de résoudre, dans l’ensemble des fonctions dérivables surR, l’équa-tion :
y ′−ay = b (V.5)
Remarques1. Cette équation sera équation sera appelée « équation différentielle linéaire du premier ordre avec second membre »alors que l’équation : y −ax = 0 ; sera appelée « équation sans second membre » associée à cette équation.2. Lorque a = 0, les solutions de (V.5) sont les fonctions de la forme x 7→ bx +k avec k ∈R.
3. Lorque a , 0, la fonction constante y =−b
aest une solution particulière de (V.5)
THÉORÈME V.4.3Soit a et b deux nombres réels avec a , 0. Les solutions surR de l’équation différentielle :
y ′−ay = b
sont les fonctions de la forme,
x 7→ k eax −b
a
où k est un nombre réel.
Démonstration Posons z = y +b
a. On a donc : y = z −
b
aet y ′ = z′ ; d’où :
y ′−ay = b ⇐⇒ z′−a
(
z −b
a
)
= b ⇐⇒ z′−az = 0
D’après le théoréme V.4.1, les solutions de la dernière équation sont de la forme z : x 7→ k eax avec k ∈R, nous en déduisons que les solutions de
(V.5) sont les fonctions de la forme y : x 7→ k eax −b
aavec k ∈Rä
Remarque On peut retenir ce théorème sous la forme suivante : La solution générale de l’équation avec secondmembre est la somme de la solution générale de l’équation sans second membre et d’une solution particulière.On retrouve cette formulation arithmétique avec les équation diophantiennes du type : ax +by = c.
LYCÉE PONTUS DE TYARD Terminale VI

V.4. Équations différentielles 67
Exemple Les solutions surR de l’équation différentielle : y ′−2y = 5 ; sont les fonctions de la forme : x 7→ k e2x −5
2où
k est un nombre réel. Les fonctions x 7→ e2x −5
2, x 7→ −e2x −
5
2, x 7→ 5e2x −
5
2et x 7→−
5
2sont donc des solutions surR.
THÉORÈME V.4.4Soit a et b deux nombres réels avec a , 0 et (x0, y0) un couple de nombres réels.Il existe une et une seule solution f surR de l’équation différentielle : y ′−ay = b ; vérifiant : f (x0) = y0.
DémonstrationLes solutions de l’équation sont les fonctions fk : x 7→ k eax −b
aavec k ∈R.
fk (x0) = y0 ⇐⇒ k eax0 −b
a= y0 ⇐⇒ k =
(
y0 +b
a
)
e−ax0 .
La seule solution vérifiant la condition supplémentaire est donc : x 7→(
y0 +b
a
)
ea(x−x0) −b
a. ä
Remarque Lorsque a = 0 l’unique courbe intégrale de y ′ − ay = b passant par A(x0 ; y0) est la droite d’équationy = b(x − x0)+ y0.
Exercice V.4.2. 1. Résoudre surR l’équation y ′ = 3y −7.
2. Détermininer la solution, f , vérifiant f (2) = 5.
Solution 1. On remarque que y =7
3est une solution paticulière, les solutions de l’équation sont donc les fonctions :
x 7→ k e3x +7
3avec k ∈R.
2. On a : f (2) = 5 ⇐⇒ k e6+7
3= 5 ⇐⇒ k =
8
3e−6.
On en déduit que f est la fonction : x 7→8
3e3(x−2)+
7
3.
V.4.3.a Temps caractéristique
En physique on utilise parfois le temps caractéristique lorsqu’on est confronté à la solution d’une équation de laforme y ′ = ay +b avec a < 0 vérifiant y(0) = 0.
La solution générale de l’équation est : t 7→ k eat −b
aet la solution particulière vérifie k =
b
a. On en déduit qu’a chaque
instant : y(t)=−b
a
(
1−eat)
.
Le temps caractéristique (ou constante de temps en électricité) est l’abscisse du point d’intersection de l’asymptoteet de la tangente à l’origine à la courbe représentative de la fonction y .
O ~ı
~
t
y
τ
−b
a
−b
a×0,63
FIGURE V.4 – Courbe de y , asymptote et tangente à l’origine.
Remarques1. y(0) = 0 et y ′(0) = b donc l’équation réduite de la tangente, T, à la courbe représentative de y, à l’origine est y = bx.
- série S

68 V. Exponentielles et équations différentielles
2. On a : a < 0 ; donc limt→+∞
y(t) =−b
a; la droite D d’équation, y =−
b
a, est asymptote à la courbe en +∞.
3. le temps caractéristique τ est l’abscisse du point d’intersection de T et D, donc la solution de l’équation bx =−b
a
soit τ=−1
a.
Interprétation
– On a : y(τ)=−b
a
(
1−exp−1)
; or : 1−exp−1= 0,63 · · · ; ainsi à l’instant τ, la quantité y a atteint 63% de sa valeur
limite.
– On a : y(5τ) =−b
a
(
1−exp−5)
; or : 1−exp−5= 0,99 · · · ; ainsi à l’instant τ, la quantité y a atteint 99% de sa valeur
limite.
V.4.4 Exercices
V.4.a. Résoudre sur R les équations différentielles sui-vantes.
a. y ′ = y .
b. y ′ =−y .
c. y ′ =−3y .
d. cos(π
3
)
y ′ = cos(π
6
)
y .
V.4.b. Déterminer la solution surR vérifiant la conditioninitiale.
a. y ′ = 2y et y(0) = 1.
b. y ′ =−y et y(3) = 1.
c. y ′−3y = 0 et y(4) = e2.
V.4.c. 1. Résoudre sur R l’équation différentielle : y ′′ =3y ′.
2. Déterminer la solution vérifiant : y(0) = 0 et y ′(0) = 3.
V.4.d. Une population de microbes se développe dans uneculture suivant une loi où à chaque instant le taux d’ac-croissement est proportionnel à l’effectif. Sachant qu’aubout d’une heure il y a 104 microbes et que deux heuresplus tard il y en 4×104 , quelle est l’effectif initial de cetteculture ?
LYCÉE PONTUS DE TYARD Terminale VI
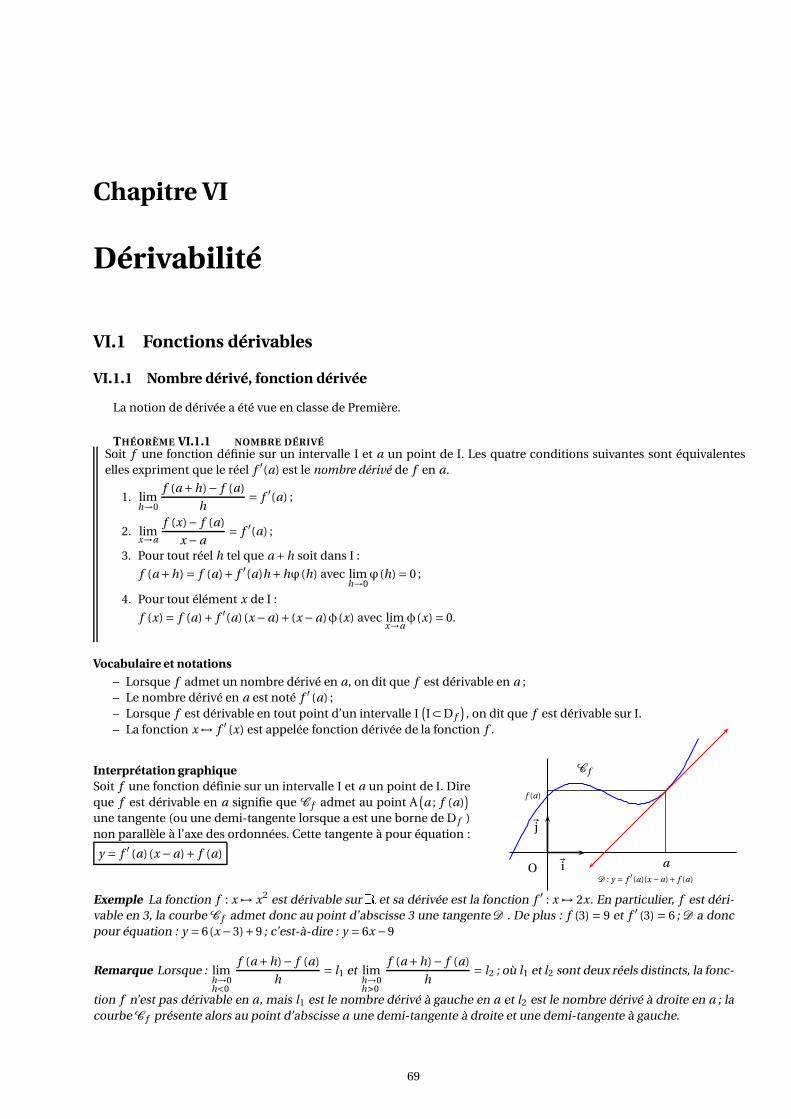
Chapitre VI
Dérivabilité
VI.1 Fonctions dérivables
VI.1.1 Nombre dérivé, fonction dérivée
La notion de dérivée a été vue en classe de Première.
THÉORÈME VI.1.1 NOMBRE DÉRIVÉSoit f une fonction définie sur un intervalle I et a un point de I. Les quatre conditions suivantes sont équivalenteselles expriment que le réel f ′(a) est le nombre dérivé de f en a.
1. limh→0
f (a +h)− f (a)
h= f ′(a) ;
2. limx→a
f (x)− f (a)
x −a= f ′(a) ;
3. Pour tout réel h tel que a +h soit dans I :
f (a +h) = f (a)+ f ′(a)h+hϕ (h) avec limh→0
ϕ (h) = 0 ;
4. Pour tout élément x de I :
f (x) = f (a)+ f ′(a) (x −a)+ (x −a)φ(x) avec limx→a
φ(x) = 0.
Vocabulaire et notations
– Lorsque f admet un nombre dérivé en a, on dit que f est dérivable en a ;– Le nombre dérivé en a est noté f ′ (a) ;– Lorsque f est dérivable en tout point d’un intervalle I
(
I ⊂ D f
)
, on dit que f est dérivable sur I.– La fonction x 7→ f ′ (x) est appelée fonction dérivée de la fonction f .
Interprétation graphiqueSoit f une fonction définie sur un intervalle I et a un point de I. Direque f est dérivable en a signifie que C f admet au point A
(
a ; f (a))
une tangente (ou une demi-tangente lorsque a est une borne de D f )non parallèle à l’axe des ordonnées. Cette tangente à pour équation :
y = f ′ (a) (x −a)+ f (a)~i
~j
O
C f
f (a)
D : y = f ′(a)(x −a)+ f (a)
a
Exemple La fonction f : x 7→ x2 est dérivable surR et sa dérivée est la fonction f ′ : x 7→ 2x. En particulier, f est déri-vable en 3, la courbe C f admet donc au point d’abscisse 3 une tangente D . De plus : f (3) = 9 et f ′ (3) = 6 ; D a doncpour équation : y = 6(x −3)+9 ; c’est-à-dire : y = 6x −9
Remarque Lorsque : limh→0h<0
f (a +h)− f (a)
h= l1 et lim
h→0h>0
f (a +h)− f (a)
h= l2 ; où l1 et l2 sont deux réels distincts, la fonc-
tion f n’est pas dérivable en a, mais l1 est le nombre dérivé à gauche en a et l2 est le nombre dérivé à droite en a ; lacourbe C f présente alors au point d’abscisse a une demi-tangente à droite et une demi-tangente à gauche.
69
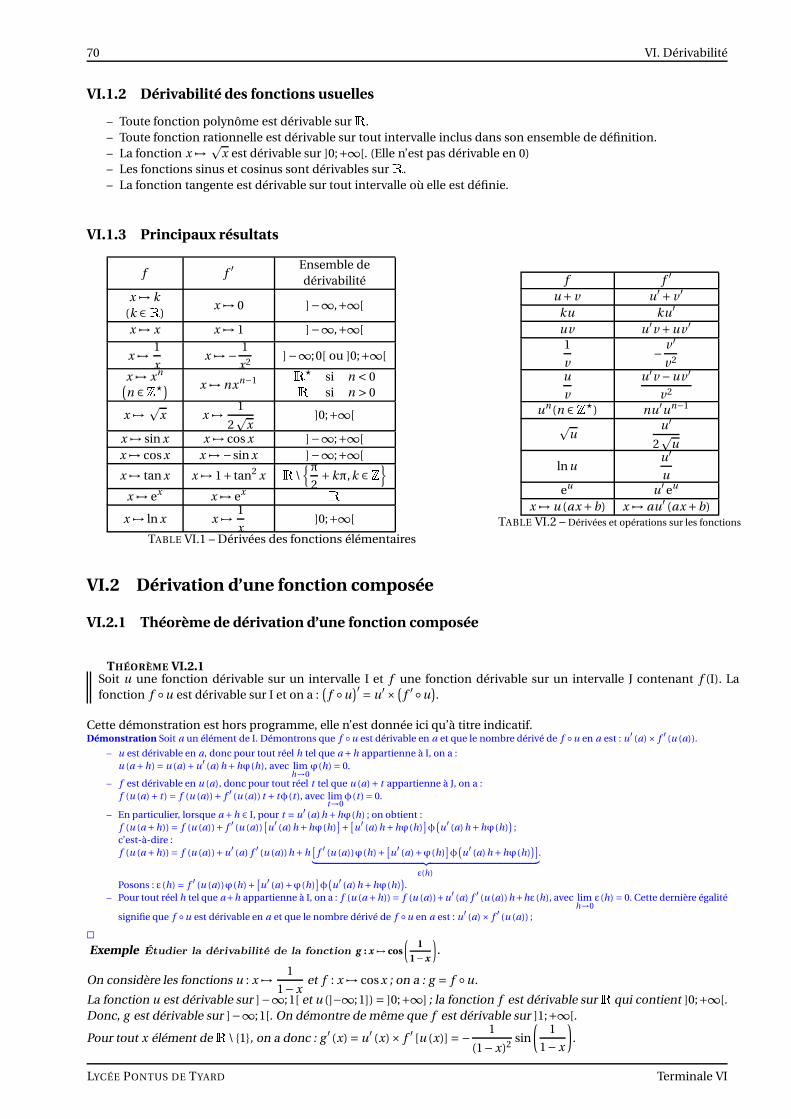
70 VI. Dérivabilité
VI.1.2 Dérivabilité des fonctions usuelles
– Toute fonction polynôme est dérivable surR.– Toute fonction rationnelle est dérivable sur tout intervalle inclus dans son ensemble de définition.– La fonction x 7→
px est dérivable sur ]0;+∞[. (Elle n’est pas dérivable en 0)
– Les fonctions sinus et cosinus sont dérivables surR.– La fonction tangente est dérivable sur tout intervalle où elle est définie.
VI.1.3 Principaux résultats
f f ′ Ensemble dedérivabilité
x 7→ k
(k ∈R)x 7→ 0 ]−∞,+∞[
x 7→ x x 7→ 1 ]−∞,+∞[
x 7→1
xx 7→ −
1
x2]−∞;0[ ou ]0;+∞[
x 7→ xn(
n ∈Z⋆) x 7→nxn−1 R⋆ si n < 0R si n > 0
x 7→p
x x 7→1
2p
x]0;+∞[
x 7→ sin x x 7→ cos x ]−∞;+∞[x 7→ cos x x 7→ −sin x ]−∞;+∞[
x 7→ tan x x 7→ 1+ tan2 x R\π
2+kπ,k ∈Z
x 7→ ex x 7→ ex Rx 7→ ln x x 7→
1
x]0;+∞[
TABLE VI.1 – Dérivées des fonctions élémentaires
f f ′
u+ v u′+ v ′
ku ku′
uv u′v +uv ′
1
v−
v ′
v2
u
v
u′v −uv ′
v2
un (n ∈Z⋆) nu′un−1
pu
u′
2p
u
ln uu′
ueu u′ eu
x 7→ u (ax +b) x 7→ au′ (ax +b)TABLE VI.2 – Dérivées et opérations sur les fonctions
VI.2 Dérivation d’une fonction composée
VI.2.1 Théorème de dérivation d’une fonction composée
THÉORÈME VI.2.1Soit u une fonction dérivable sur un intervalle I et f une fonction dérivable sur un intervalle J contenant f (I). Lafonction f u est dérivable sur I et on a :
(
f u)′ = u′×
(
f ′ u)
.
Cette démonstration est hors programme, elle n’est donnée ici qu’à titre indicatif.Démonstration Soit a un élément de I. Démontrons que f u est dérivable en a et que le nombre dérivé de f u en a est : u′ (a)× f ′ (u (a)).
– u est dérivable en a, donc pour tout réel h tel que a +h appartienne à I, on a :u (a +h)= u (a)+u′ (a) h+hϕ(h), avec lim
h→0ϕ(h) = 0.
– f est dérivable en u (a), donc pour tout réel t tel que u (a)+ t appartienne à J, on a :f (u (a)+ t ) = f (u (a))+ f ′ (u (a)) t + tφ(t ), avec lim
t→0φ(t )= 0.
– En particulier, lorsque a +h ∈ I, pour t =u′ (a) h+hϕ(h) ; on obtient :f (u (a +h))= f (u (a))+ f ′ (u (a))
[
u′ (a) h+hϕ(h)]
+[
u′ (a) h+hϕ(h)]
φ(
u′ (a) h+hϕ(h))
;c’est-à-dire :f (u (a +h))= f (u (a))+u′ (a) f ′ (u (a))h+h
[
f ′ (u (a))ϕ(h)+[
u′ (a)+ϕ(h)]
φ(
u′ (a) h+hϕ(h))]
︸ ︷︷ ︸
ε(h)
.
Posons : ε(h) = f ′ (u (a))ϕ(h)+[u′ (a)+ϕ(h)
]φ
(u′ (a) h+hϕ(h)
).
– Pour tout réel h tel que a+h appartienne à I, on a : f (u (a +h))= f (u (a))+u′ (a) f ′ (u (a))h+hε(h), avec limh→0
ε(h) = 0. Cette dernière égalité
signifie que f u est dérivable en a et que le nombre dérivé de f u en a est : u′ (a)× f ′ (u (a)) ;
äExemple Étudier la dérivabilité de la fonction g : x 7→ cos
(1
1−x
)
.
On considère les fonctions u : x 7→1
1− xet f : x 7→ cos x ; on a : g = f u.
La fonction u est dérivable sur ]−∞;1[ et u (]−∞;1]) = ]0;+∞] ; la fonction f est dérivable surR qui contient ]0;+∞[.Donc, g est dérivable sur ]−∞;1[. On démontre de même que f est dérivable sur ]1;+∞[.
Pour tout x élément deR\ 1, on a donc : g ′ (x) = u′ (x)× f ′ [u (x)] =−1
(1− x)2sin
(1
1− x
)
.
LYCÉE PONTUS DE TYARD Terminale VI
VI.2. Dérivation d’une fonction composée 71
Remarque Soit g une fonction dont l’ensemble de définition est une réunion d’intervalles tous non réduits à un point.Si g est la composée de deux fonctions dérivables sur leur ensemble de définition, alors g est dérivable sur son en-semble de définition.
VI.2.2 Dérivée de la fonctionp
u
THÉORÈME VI.2.2Soit u une fonction dérivable et strictement positive sur un intervalle I.
La fonction g : x 7→√
u (x) est dérivable sur I et sa dérivé est la fonction g ′ : x 7→u′ (x)
2p
u (x).
Démonstration La fonction u est dérivable sur I et u (I) ⊂ ]0;+∞] car u est strictement positive sur I. De plus, la fonction x 7→p
x est dérivable sur
]0;+∞[ et sa dérivée est la fonction x 7→1
2p
x. D’après le théorème de dérivation d’une fonction composée g est dérivable sur I et sa dérivée est la
fonction x 7→u′ (x)1
2p
u (x). ä
Exemple Exercice VI.2.1. Déterminer la dérivée de la fonction g : x 7→√
x2 +1.
Considérons la fonction u : x 7→ x2 + 1 ; on a : g =p
u. La fonction u est dérivable et strictement positive sur R ;
donc g est dérivable sur R. Pour tout réel x, on a : g ′ (x) =u′ (x)
2p
u (x)=
2x
2p
x2 +1. On en déduit que g ′ est la fonction
x 7→x
px2 +1
.
VI.2.3 Dérivée de la fonction un (n ∈Z)
1er cas n > 1THÉORÈME VI.2.3
Soit u une fonction dérivable sur un intervalle I et n un entier naturel non nul.La fonction g : x 7→un (x) est dérivable sur I et sa dérivé est la fonction :g ′ : x 7→n×u′ (x)×un (x).
Démonstration La fonction u est dérivable sur I. De plus, la fonction x 7→ xn est dérivable surR et sa dérivée est la fonction x 7→nxn−1. D’après le
théorème de dérivation d’une fonction composée g est dérivable sur I et sa dérivée est la fonction x 7→u′ (x)×n ×un (x). äExemple Exercice VI.2.2. Déterminer la dérivée de la fonction f : x 7→ sin6 x
La fonction sin est dérivable surR et sa dérivée est la fonction cos, donc la fonction f est dérivable surR et sa dérivéeest la fonction f ′ : x 7→ 6cos x sin5 x.
2e cas n < 0THÉORÈME VI.2.4
Soit u une fonction dérivable sur un intervalle I, ne s’annulant pas sur I, et n un entier (n < 0). La fonction g : x 7→ un (x)est dérivable sur I et sa dérivée est la fonctiong ′ : x 7→n×u′ (x)×un (x).
Il suffit d’appliquer le théorème précédent à la fonction v =1
u.
Exemple Exercice VI.2.3. Déterminer la dérivée de la fonction f : x 7→1
(
x2 +1)6
La fonction x 7→ x2 +1 est dérivable surR, ne s’anulle pas surR et sa dérivée est la fonction x 7→ 2x, donc la fonction
f est dérivable surR et sa dérivée est la fonction f ′ : x 7→ −62x
(
x2 +1)7
.
Remarque Comme précédemment, les règles de calculs sur les puissances d’exposants entiers s’étendent aux expo-sants rationnels. Nous admettons momentanément le théorème suivant.
- série S

72 VI. Dérivabilité
THÉORÈME VI.2.5Soit r un nombre rationnel non nul, u une fonction dérivable et strictement positive sur un intervalle I.
1. La fonction x 7→ xr est dérivable sur ]0;+∞[ et sa dérivée est la fonction x 7→ r xr−1.
2. La fonction ur est dérivable sur I et sa dérivée est la fonction r u′ur−1.
La seconde partie se déduit de la première à l’aide du théorème de dérivation des fonctions composées.
Exemple Exercice VI.2.4. Déterminer la dérivée de la fonction f : x 7→(
2x2 +1)3 √
2x2 +1.
On a f = u72 , où u est la fonction x 7→ 2x2+1 ; la fonction u est dérivable et strictement positive surR, et sa dérivée est
la fonction u′ : x 7→ 4x ; la fonction f est donc dérivable surR et sa dérivée est la fonction f ′ définie par :
f ′(x) =7
2×4x
(
2x2 +1) 5
2 = 14x(
2x2 +1)2
√
2x2 +1.
VI.3 Dérivation et études de fonctions
VI.3.1 Sens de variation
THÉORÈME VI.3.1Soit f une fonction dérivable sur un intervalle I.– Si f ′ > 0 sur I (sauf peut-être en un nombre fini de points), alors f est strictement croissante sur I ;– si f ′ < 0 sur I (sauf peut-être en un nombre fini de points), alors f est strictement décroissante sur I ;– si f ′ est nulle sur I, alors f est constante sur I.
Remarque De même si f ′ Ê 0 (resp. f ′ É 0) sur I, alors f est croissante (resp. décroissante) sur I.
Exemple La fonction f : x 7→ x2 est dérivable sur [0;+∞[ et sa dérivée est strictement positive sur ]0;+∞] ; donc f eststrictement croissante sur [0;+∞[.
Remarque La fonction f : x 7→1
xa une dérivée strictement négative sur son ensemble de définition et pourtant la
fonction f n’est pas décroissante. L’ensemble de définition de f n’est pas un intervalle.
VI.3.2 Extremum local
D’après la figure ci-contre :– f (c) est maximum local de f ;– f (d) est minimum local de f .On dit également que f admet un maximum en c et un minimum end .
THÉORÈME VI.3.2Soit f une fonction dérivable sur un intervalle ouvert I. f admet unextremum local en a si et seulement si f ′ s’annule et change de signeen a. ~i
~j
O
C ff (c)
f (d )
c d
Ce théorème est connu depuis la classe de Première.
LYCÉE PONTUS DE TYARD Terminale VI

VI.4. Dérivées successives d’une fonction 73
VI.4 Dérivées successives d’une fonction
DÉFINITIONS VI.4.1 DÉRIVÉE n-IÈME D’UNE FONCTION
Soit f une fonction et I un intervalle.(1) Si f est dérivable sur I, sa dérivée f ′ est appelée dérivée première de f ; on la note aussi f (1).(2) Si f ′ est dérivable sur I, sa dérivée f ′′ est appelée dérivée seconde de f ; on la note aussi f (2).(3) De proche en proche, la fonction dérivée n-ième de f sur I, si elle existe, est la dérivée de la fonction dérivée(n+1)-ième de f sur I ; on la note f (n).
f (n) est aussi appelée dérivée d’ordre n de la fonction f . On utilise également, notamment en sciences physiques, la
notation de Leibniz : f ′, f ′′, . . ., f (n) ; sont notées respectivementd f
dx,
d2 f
dx2, . . .,
dn f
dxn.
Exemples
1. Exercice VI.4.1. Calculer les dérivées successives de la fonction f : x 7→1
3x3 −2x2 −3x +4.
On a : f ′(x) = x2 −4x −3 ; f ′′ (x) = 2x −4 ; f (3)(x) = 2 ; f (4) (x) = 0.Donc, pour tout nombre entier n tel que n Ê 4, on a : f (n) (x) = 0.
2. Exercice VI.4.2. Calculer la dérivée n-ième de la fonction g : x 7→ sin x .
On a :g ′ (x) = cos x = sin
(
x +π
2
)
g ′′ (x) = cos(
x +π
2
)
= sin(
x +2×π
2
)
g (3) (x) = cos(
x +2×π
2
)
= sin(
x +3×π
2
)
.
On peut conjecturer que : ∀n ∈N⋆, g (n)(x) = sin(
x +nπ
2
)
.
Démontrons cette égalité par récurrence.
1. L’égalité est vraie pour n = 1.
2. Supposons l’égalité vraie pour un entier naturel non nul k, c’est-à-dire :
g (k) (x) = sin(
x +kπ
2
)
;
on en déduit que : g (k+1) (x) = cos(
x +kπ
2
)
= sin(
x + (k +1)π
2
)
;
donc, l’égalité est vraie pour k +1.
Elle est donc vraie pour tout entier naturel non nul.
VI.5 Exercices résolus
Exercice VI.5.1. Démontrer que la fonction f : x 7→ x +1
2
√
x2 +1 réalise une bijection deR versR et déterminer sa bijection réciproque.
Solution Pour tout réel x, x2 +1 > 0, donc l’ensemble de définition de f estR.Soit y un nombre réel, démontrons que y a un et un seul antécédent x par f dansR.
y = f (x) ⇔ y = x +1
2
√
x2 +1
⇔ 2(
y − x)
=√
x2 +1
⇔(
2(
y − x))2 = x2 +1 et 2
(
y − x)
Ê 0
⇔ 3x2 −8y x +4y2 −1 = 0 et x − y É 0
On reconnaît une équation du second degré d’inconnue x dont le discriminant est :∆=
(
−8y)2 −4×3
(
4y2 −1)
= 16y2 +12.
∆> 0 donc l’équation a deux solutions : x1 =8y −
√
16y2 +12
6et x2 =
8y +√
16y2 +12
6;
c’est-à-dire : x1 =4y −
√
4y2 +3
3et x2 =
4y +√
4y2 +3
3.
D’où il vient : x1 − y =y −
√
4y2 +3
3et x2 − y =
y +√
4y2 +3
3.
- série S

74 VI. Dérivabilité
Or : 4y2 +3 > 4y2 ; donc :√
4y2 +3 >∣∣2y
∣∣ ;
D’où : x1 − y <y −2
∣∣y
∣∣
3É 0 et x2 − y >
y +2∣∣y
∣∣
3Ê 0.
x1 est la seule solution vérifiant la contrainte x − y É 0 , x1 est donc l’unique antécédent de y dans R et on a : y =
f (x) ⇔ x =4y −
√
4y2 +3
3.
Par conséquent, la fonction f réalise une bijection de R vers R et sa bijection réciproque est la fonction f −1 : x 7→4x −
p4x2 +3
3.
Exercice VI.5.2. On se propose de déterminer la dérivée de la fonction f : x 7→
√
cos x −1+x2
2.
1. a. Étudier le signe de la fonction u : x 7→ cos x −1+x2
2(on pourra utiliser u′′).
b. En déduire l’ensemble de définition de la fonction f .
2. Étudier la dérivabilité de f en 0 (on pourra poser : t =x
2).
3. Déterminer la dérivée de la fonction f .
Solution
1. a. La fonction u est la somme de la fonction cos et d’une fonction polynôme, elle est donc deux fois dérivable surR. Sa dérivée première est la fonction u′ : x 7→ x − sin x ; et sa dérivée seconde est la fonction u′′ : x 7→ 1− cos x. Lafonction u′′ étant positive on en déduit que la fonction u′ est strictement 1 croissante surR. De plus u′ (0) = 0 donc u′
est strictement positive sur ]0;+∞[ et strictement négative sur ]−∞;0[ et par conséquent u est strictement croissantesur [0;+∞[ et strictement décroissante sur ]−∞;0] or u(0) = 0 donc la fonction est strictement positive sur R⋆ ets’annule en 0.
On a f =p
u. La fonction u est dérivable surR, et est strictement positive surR⋆, f est donc dérivable surR⋆ et
sa dérivée sur R⋆ estu′
2p
u, pour savoir si elle dérivable en 0, on doit calculer la limite en 0 de la fonction θ définie
par : θ (x) =f (x)− f (0)
x −0=
f (x)
x.
Posons : t =x
2. Pour tout réel non nul x, on a :
u (x) = cos2t −1+(2t)2
2= 1−2sin2 t −1+2t 2 = 2t 2
(
1−(
sin t
t
)2)
.
Donc pour tout réel non nul x : θ (x) =p
u (x)
x=
√
2t 2(
1−( sin t
t
)2)
2t=
p2
2×|t |t
√
1−(
sin t
t
)2
.
Donc : θ (x) =
−p
2
2
√
1−(
sin t
t
)2
si t < 0
p2
2
√
1−(
sin t
t
)2
si t > 0
On sait que : limt→0
sin t
t= 1 ; donc par composition par la fonction x 7→
p2
2
√
1− x2 :
limt→0t>0
p2
2
√
1−(
sin t
t
)2
= 0 ;
on a de même : limt→0t<0
−p
2
2
√
1−(
sin t
t
)2
= 0.
Pour x > 0, on a : limx→0x>0
x
2= 0 avec
x
2> 0 et lim
t→0t>0
p2
2
√
1−(
sin t
t
)2
= 0 ; Donc par composition : limx→0x>0
θ (x) = 0 ; de
même : limx→0x<0
θ (x) = 0. Donc la fonction f est dérivable en 0 et f ′ (0) = 0.
La fonction f est donc dérivable surR et sa dérivée est la fonction f ′ définie par :
f ′ (x) =u′ (x)
2p
u (x)=
x − sin x
2√
cos x −1+ x2
2
lorsque x , 0 et f ′ (0) = 0.
1. on peut admettre ici cette justification peu rigoureuse, un argumentation correcte serait la suivante. Soit a et b deux réels tels que a < b.La fonction u′′ est dérivable et strictement positive (sauf en nombre fini de points) sur [a;b], u′ est donc strictement croissante sur [a;b] ; d’où :u′ (a) <u′ (b) ; cette inégalité étant vérifiée pour tous réels a et b tels que a < b, la fonction est strictement croissante surR.
LYCÉE PONTUS DE TYARD Terminale VI

VI.5. Exercices résolus 75
Exercice VI.5.3. On se propose d’étudier la fonction f : x 7→|x −1|
p3−x
p4−x
.
1. Déterminer l’ensemble de définition, D f , de f .
2. Étudier la limite de f en −∞3. Étudier la dérivabilité de f en 1.
4. Étudier la dérivabilité de f en 3.
5. On considère la fonction u définie sur ]−∞;3[ par u (x) =√
3−x
4−x;
calculer u′(x).
6. Déterminer la dérivée de f , étudier le sens de variation de f et dresser son tableau de variation.
7. a. Étudier la limite en −∞ de x 7→ f (x)+x −1 (on pourra poser t = x −1).
b. En déduire que la droite D d’équation y =−x +1
2est asymptote à la courbe représentative, C f , de f .
8. Représenter graphiquement la fonction f .
Solution
1. Pour tout nombre réel x, f est définie en x si et seulement si 3− x Ê 0 et 4− x > 0, donc D f =]−∞;3]
2. Pour tout x < 0, on a : f (x) = (1− x)
√√√√
1− 3x
1− 4x
.
De plus : limx→−∞
3
x= lim
x→−∞4
x= 0 ;
donc par différences, quotient puis composition par la fonction racine carrée :
limx→−∞
√√√√
1− 3x
1− 4x
= 1 ;
or : limx→−∞
(1− x)=+∞ ; donc par produit : limx→+∞
f (x) =+∞ .
3. On a : f (1) = 0 ; donc pour étudier la dérivabilité de f en 1, il faut étudier la limite def (1+h)
hlorsque h tend vers 0.
Pour h É 2 et h , 0, on a :f (1+h)
h=
|h|h
×p
2−hp
3−h,
avec : limh→0
p2−h
p3−h
=p
6
3;|h|h
=−1 lorsque h<0 et|h|h
= 1 lorsque h>0.
Donc par produit : limh→0h<0
f (1+h)
h=−
p6
3et lim
h→0h>0
f (1+h)
h=
p6
3.
Donc f n’est pas dérivable en 1, mais la courbe C f présente au point d’abscisse 1 une demi-tangente à droite de co-
efficient directeur
p6
3et une demi-tangente à gauche de coefficient directeur −
p6
3.
4. La fonction f n’est pas définie à droite de 3 et f (3) = 0, donc pour étudier la dérivabilité de f en 3, il faut étudier
la limite def (3+h)
hlorsque h tend vers 0 par valeurs inférieures. Pour h < 0, on a :
f (3+h)
h=
p−h
h×
|2+h|p
1−h=
−1
p−h
×|2+h|p
1−h. On a : lim
h→0h<0
−1
p−h
=−∞ et limh→0h<0
|2+h|p
1−h= 2 ; donc par produit : lim
h→0h<0
f (3+h)
h=−∞.
Donc f n’est pas dérivable en 3, mais la courbe C f présente au point d’abscisse 3 une demi-tangente verticale (vers lehaut).
5. La fonction v : x 7→3− x
4− xest une fonction homographique, elle est donc dérivable sur son ensemble de définition,
\4 , de plus pour x < 3, 3− x > 0 et 4− x > 0 donc v est strictement positive sur ]−∞;3[ par u =p
v est dérivable
sur ]−∞;3[ et sa dérivée est u′ =v ′
2p
v. La dérivée de v est la fonction v ′ : x 7→ −
1
(4− x)2, donc la dérivée de u est la
fonction est la fonction u′ définie sur ]−∞;3[ par : u′(x) =−1
2(4− x)2√
3−x4−x
.
C’est-à-dire : u′(x) =−1
2(4− x)p
(3− x)(4− x.
6. Sur ]−∞;1[∪]1;3[ f est le produit de deux fonctions dérivables donc f est dérivable.pour x ∈]1;3[ : f (x) = (x −1)u(x) ; donc :
- série S

76 VI. Dérivabilité
f ′(x) = u(x)+ (x −1)u′(x)
=√
3− x
4− x−
x −1
2(4− x)p
(3− x)(4− x)
=(3− x) (4− x)− (x −1)
2(4− x)p
(3− x) (4− x)
=2x2 −15x +25
2(4− x)p
(3− x) (4− x)
Dans cette fraction le dénominateur (produit de quantité positives) est positif, donc f ′(x) est du signe de 2x2−15x+25
. Le discriminant est ∆= 152 −4×2×25 = 25 , donc le trinôme admet deux racines : x1 =15−5
4=
5
2et x1 =
15+5
4= 5.
Le trinôme est du signe de 2 à l’extérieur des racines et du signe de −2 à l’intérieur, donc f ′ est strictement positive
sur ]1;5
2[ et strictement négative sur ]
5
2;3[ ; donc f est strictement croissante sur [1;
5
2] et strictement décroissante sur
[5
2;3].
Pour x ∈]−∞;1[ : f (x) = (1− x)u(x) ; donc :
f ′(x) = −u(x)+ (1− x)u′(x)
= −√
3− x
4− x+
x −1
2(4− x)p
(3− x) (4− x)
=−(3− x)(4− x)+ (x −1)
2(4− x)p
(3− x) (4− x)
=−
(
2x2 −15x +25)
2(4− x)p
(3− x)(4− x)
D’après l’étude précédente, f ′ est strictement négative sur ]−∞;1[donc f est strictement décroissante sur ]−∞;1]. Donc finalement f
est strictement décroissante sur ]−∞;1] et sur [5
2;3] et strictement
croissante sur [1;5
2]. On en déduit le tableau de variations ci-contre.
x −∞ 15
23
f ′(x) − + −+∞
p3
2f (x)
0 0
7. a. Posons : t = x −1. Pour x < 1, on a :
f (x)+ x −1 =|t |
p2− t
p3− t
+ t
= t
(
1−p
2− tp
3− t
)
= t
p3− t −
p2− t
p3− t
= t(3− t )− (2− t )
p3− t
(p3− t +
p2− t
)
= t1
(p−t
)2√
1− 3t
(√
1− 3t+
√
1− 2t
)
=−1
√
1− 3t
(√
1− 3t +
√
1− 2t
)
Or : limt→−∞
3
t= lim
t→−∞
2
t= 0 ;
donc par différences, composition par la fonction racine carrée, somme, produit et quotient :
limx→−∞
(
f (x)+ x −1)
=−1
2. D’où il vient par somme : lim
x→−∞
(
f (x)−(
−x +1
2
))
= 0.
Donc la droite D d’équation y =−x +1
2est asymptote à C f en −∞.
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre VII
Nombres complexes
VII.1 Introduction
VII.1.1 Des équations et des ensembles
Dans les classes précédentes, on a vu l’ensemble N, dans cette ensemble on peut résoudre des équations tellesque : x+3 = 7 ; où la solution est 4. Cependant, dansN, des équations telles que : x+7 = 3 ; n’ont pas de solution. C’estalors qu’on a eu l’idée d’étendre l’ensemble des nombres ; on a ainsi obtenu un nouvel ensemble appeléZ, dans lequell’équation précédente a une solution : −4. Mais cela n’était pas suffisant car dans cet ensemble des équations tellesque : 3x =−15 ; ont une solution alors que d’autres équations, pourtant semblables, telles que : 3x =−7 ; n’en ont pas.On a donc à nouveau étendu l’ensemble des nombres pour obtenir un nouvel ensemble, Q, dans lequel l’équation
précédente a une solution : −7
3. Mais cela n’était pas suffisant car dans cet ensemble des équations telles que : x2 = 4 ;
ont deux solutions (2 et −2) alors que des équations assez proches telles que : x2 = 3 ; n’en ont pas. On a donc ànouveau étendu l’ensemble des nombres pour obtenir un nouvel ensemble, R, dans lequel l’équation précédente adeux solutions : −
p3 et
p3. Mais cela n’est pas suffisant car dans cet ensemble des équations telles que : x2 = −4 ;
assez proches des deux équations précédentes, n’ont pas de solution. Si on veut qu’une telle équation ait, comme lesautres, deux solutions il faut étendre l’ensemble des nombres.
On part du principe qu’il existe un nombre i (i comme imaginaire) tel que : i2 =−1 ; et notre objectif est de trouver
un nouvel ensemble, que nous noteronsC, qui sera le plus petit ensemble de nombres (qui seront appelés nombrescomplexes) vérifiant les contraintes suivantes.
1. R⊂C ;
2. i ∈C ;
3. Les lois algébriques concernant l’addition et la multiplication des nombres sont les mêmes dansC que dansR.
La somme ou le produit de deux nombres réels est un nombre réel, la dernière condition impose donc que la sommeou le produit de deux nombres complexes soit un nombre complexe. En particulier 2i et −2i sont deux nombrescomplexes et on a :(2i )2 = 22 × i 2 = 4× (−1) =−4 et (−2i )2 = (−2)2 × i 2 = 4× (−1) =−4 ;donc la dernière équation envisagée à maintenant, elle aussi, deux solutions.
Pour les raisons que nous venons d’évoquer, tout nombre de la forme (dite algébrique) a + i b, où a et b sontdes nombres réels, sont des nombres complexes. Peut-on par additions ou par multiplications obtenir des nombrescomplexes qui ne peuvent pas se mettre sous cette forme ? Pour se faire une idée, prenons quelques exemples.
VII.1.2 Activités
Mettre sous forme algébrique les nombre complexes suivants.z1 = (2+5i )+ (3−7i ); z2 = (2+5i )− (3−7i ); z3 = (2+5i )(3−7i )
z4 = (2+5i )(2−5i ); z5 =1
2+ ip
3; z6 =
3−7i
2+5iz7 = i
4; z8 = (1+ i )2; z9 = (1+ i )17
Plus généralement, pour z = a + i b et z ′ = a′+ i b′ (où a, a′, b, b′ sont des réels), mettre sous forme algébrique les
nombres complexes z + z ′, zz ′,z − z ′ et lorsque a , 0 ou b , 0,1
z.
77

78 VII. Nombres complexes
VII.1.3 Définitions
L’activité précédente suggère la définition suivante.DÉFINITIONS VII.1.1 NOMBRE COMPLEXE,C(1) Un nombre complexe est un nombre qui peut s’écrire sous la forme a+ i b, où a et b sont des nombres réels eti
2 =−1.(2) L’ensemble des nombres complexes est appeléC.
Remarque On a : 0×2i = (0×2)i = 0× i ; donc : 0 = 0×2i −0× i = 0(2i − i ) = 0× i ; d’où : 0× i = 0.
Notations et vocabulaire1. lorsqu’un nombre complexe z est écrit sous la forme a+ i b, où a et b sont des nombres réels, on dit qu’il est écritsous forme algébrique ;2. le nombre réel a est appelé partie réelle de z et est noté ℜe(z) ;3. le nombre réel b est appelé partie imaginaire de z et est noté ℑm(z) ; en particulier ℑm(z) est un nombre réel ;4. si b = 0, alors z = a (car on a : i ×0 = 0) ; z est un nombre réel ; tout nombre réel est bien un nombre complexe(R⊂C) ;5. Si a = 0, alors z = i b ; z est dit imaginaire pur.
Exemple Si : z =1
2+ i
p3
2; alors : ℜe(z)=
1
2et ℑm(z) =
p3
2.
VII.1.4 Calcul dansCVII.1.4.a Addition, soustraction, multiplication
Comme on l’a vu en activités, l’addition, la soustraction et la multiplication dansC sont définies de la façon sui-vante.
DÉFINITIONS VII.1.2
Soit a, a′, b, b′ des nombres réels.(1) (a + i b)+ (a′+ i b′) = (a +a′)+ i (b +b′) ;(2) (a + i b)− (a′+ i b′) = (a −a′)+ i (b −b′) ;(3) (a + i b)(a′+ i b′) = (aa′−bb′)+ i (ab′+a′b).
Remarques1. Lorsque : b = b′ = 0 ; on retrouve l’addition, la soustraction et la multiplication dansR.2. (a + i b)+ (−a − i b)= 0 ; tout nombre complexe, z = a + i b, a un opposé : −z =−a − i b.
Le théorème suivant signifie que, comme nous l’avions désiré, l’addition et la multiplication dans C ont les mêmespropriétés que dansR ; sa démonstration, fastidieuse et sans surprise, est laissée au soin du lecteur courageux.
THÉORÈME VII.1.1Pour tous nombres complexes z, z ′, z ′′, on a :
(1) z + z ′ ∈C + est un loi de composition interne àC ;(2) z + z ′ = z ′+ z + est commutative dansC ;(3) z + (z ′+ z ′′) = (z + z ′)+ z ′′ + est associative dansC ;(4) z +0 = 0+ z = z dansC, 0 est élément neutre pour + ;(5) z × z ′ ∈C × est un loi de composition interne àC ;(6) z × z ′ = z ′× z × est commutative dansC ;(7) z × (z ′× z ′′) = (z × z ′)× z ′′ × est associative dansC ;(8) z ×1 = 1× z = z dansC, 1 est élément neutre pour × ;(9) z × (z ′+ z ′′) = z × z ′+ z × z ′′ × est distributive par rapport à + dansC ;
VII.1.4.b Conjugué d’un nombre complexe
DÉFINITION VII.1.3 CONJUGUÉ D’UN NOMBRE COMPLEXESoit z un nombre complexe de forme algébrique : z = a + i b.On appelle conjugué de z le nombre complexe, noté z, défini par : z = a − i b.
LYCÉE PONTUS DE TYARD Terminale VI

VII.1. Introduction 79
Exemple Si z =1
2− i
p3
2, alors z =
1
2+ i
p3
2.
VII.1.4.c Égalité de deux nombres complexes
THÉORÈME VII.1.2
Soit z et z ′ deux nombres complexes de formes algébriques : z = a + i b et z ′ = a′+ i b′.(1) z = 0 si et seulement si a = 0 et b = 0 ;(2) z = z ′ si et seulement si a = a′ et b = b′
0 est appelé nombre complexe nul.Démonstration
(1) On sait que si a = 0 et b = 0, alors z = 0.
Réciproquement si z = 0, alors : zz = 0 ; c’est-à-dire : a2 +b2 = 0 ;
a et b sont réels et on sait que dansR la somme des carrés de deux nombres est nulle si et seulement si les deux nombres sont nuls. On en déduit
(1).
(2) On a : z − z′ = (a −a′)+ i (b−b′) ; donc : z = z′ ⇐⇒ z − z′ = 0 ⇐⇒
a −a′ = 0b−b′ = 0
⇐⇒
a = a′
b = b′ . ä
VII.1.4.d Inverse d’un nombre complexe non nul, division
THÉORÈME VII.1.3
Tout nombre complexe non nul a un inverse.
Démonstration Soit z un nombre complexe non nul de forme algébrique : z = a + i b.On a donc : a2 +b2
, 0 ; et d’après les définitions VII.1.2 :
(
a + i b
)(a
a2 +b2− i
b
a2 +b2
)
=(
a2
a2 +b2+
b2
a2 +b2
)
+ i(
−ab
a2 +b2+
ba
a2 +b2
)
= 1.
L’inverse de z s’obtient par la formule :1
z=
a
a2 +b2− i
b
a2 +b2. ä
Exemple Pour z = 3+5i , on obtient :1
z=
1
3+5i=
3−5i
32 +52=
3
34−
5
34i .
Remarque La formule introduite dans la démonstration du théorème VII.1.3 peut s’écrire :1
z=
z
zz.
THÉORÈME VII.1.4Le produit de deux nombres complexes est nul si et seulement si l’un d’entre eux au moins est nul.
Démonstration Soit z et z′ deux nombres complexes. D’après les définitions VII.1.2, le théorème VII.1.2 et la remarque §VII.1.3, si z = 0 ou z′ = 0
alors zz′ = 0.
Réciproquement, si zz′ = 0 alors z = 0 ou z′ = 0. En effet si z , 0, alors1
z× zz′ =
1
z×0 ; c’est-à-dire : z′ = 0. ä
La division se définit par :z ′
z= z ′×
1
z(pour z , 0).
Exemple2+3i
2− i=
(2+3i )(2+ i )
22 +12=
1
5+
7
5i .
VII.1.4.e Groupes et corps
Ce paragraphe peut être omis par les élèves ne suivant l’enseignement de spécialité mathématique.On a vu que dansC, + est une loi de composition interne, commutative, associative dans laquelle 0 est élément neutreet pour laquelle tout élément a un opposé ; ces cinq propriétés étant réunies, on dit que (C,+), c’est-à-direCmuni del’addition, est un groupe commutatif.
De mêmeC∗, c’est-à-direC\ 0, muni de la multiplication est groupe commutatif.(C,+) est un groupe commutatif, (C∗,×) est un groupe et × est distributive par rapport à + ; on dit que (C,+,×)
est un corps.
- série S
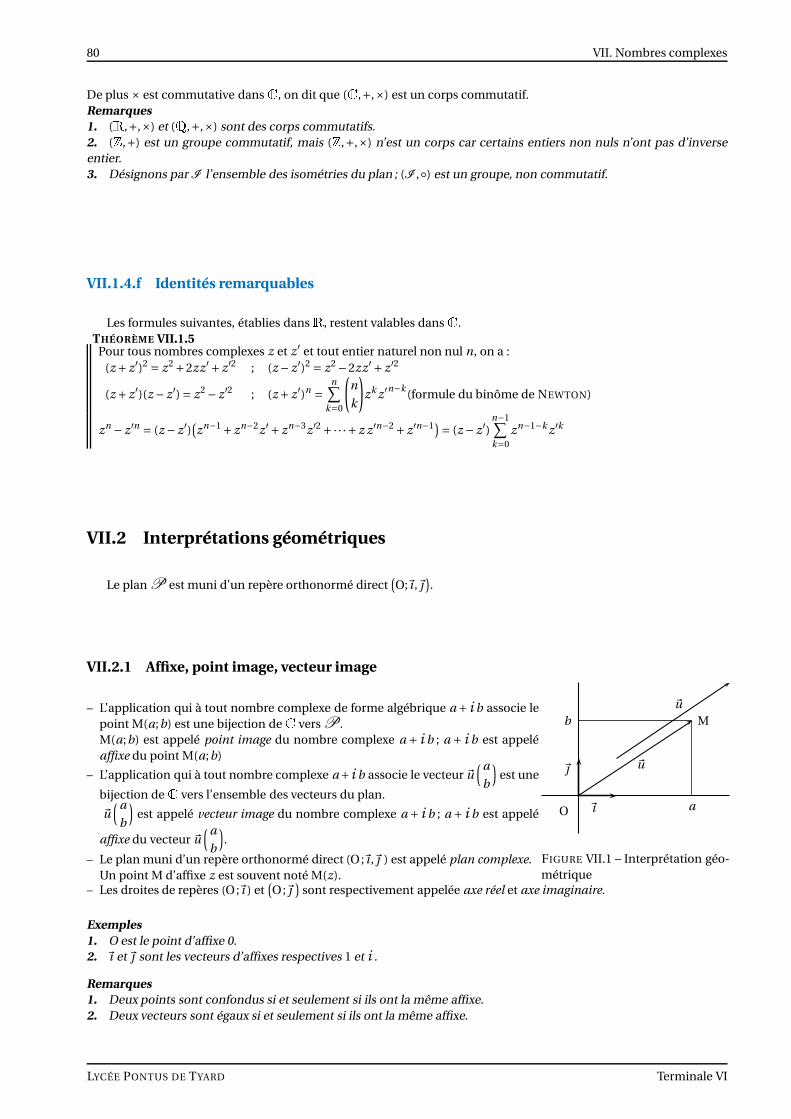
80 VII. Nombres complexes
De plus × est commutative dansC, on dit que (C,+,×) est un corps commutatif.Remarques1. (R,+,×) et (Q,+,×) sont des corps commutatifs.2. (Z,+) est un groupe commutatif, mais (Z,+,×) n’est un corps car certains entiers non nuls n’ont pas d’inverseentier.3. Désignons par I l’ensemble des isométries du plan ; (I ,) est un groupe, non commutatif.
VII.1.4.f Identités remarquables
Les formules suivantes, établies dansR, restent valables dansC.THÉORÈME VII.1.5
Pour tous nombres complexes z et z ′ et tout entier naturel non nul n, on a :(z + z ′)2 = z2 +2zz ′+ z ′2 ; (z − z ′)2 = z2 −2zz ′+ z ′2
(z + z ′)(z − z ′) = z2 − z ′2 ; (z + z ′)n =n∑
k=0
(
n
k
)
zk z ′n−k (formule du binôme de NEWTON)
zn − z ′n = (z − z ′)(
zn−1 + zn−2z ′+ zn−3z ′2 +·· ·+ z z ′n−2 + z ′n−1)= (z − z ′)n−1∑
k=0zn−1−k z ′k
VII.2 Interprétations géométriques
Le plan P est muni d’un repère orthonormé direct(
O;~ı ,~)
.
VII.2.1 Affixe, point image, vecteur image
– L’application qui à tout nombre complexe de forme algébrique a + i b associe lepoint M(a;b) est une bijection deC vers P.M(a;b) est appelé point image du nombre complexe a + i b ; a + i b est appeléaffixe du point M(a;b)
– L’application qui à tout nombre complexe a+ i b associe le vecteur ~u( a
b
)
est une
bijection deC vers l’ensemble des vecteurs du plan.
~u( a
b
)
est appelé vecteur image du nombre complexe a + i b ; a + i b est appelé
affixe du vecteur ~u( a
b
)
.
– Le plan muni d’un repère orthonormé direct (O ;~ı,~ ) est appelé plan complexe.Un point M d’affixe z est souvent noté M(z).
~ı
~
O a
b M
~u
~u
FIGURE VII.1 – Interprétation géo-métrique
– Les droites de repères (O ;~ı ) et(
O;~)
sont respectivement appelée axe réel et axe imaginaire.
Exemples1. O est le point d’affixe 0.2. ~ı et~ sont les vecteurs d’affixes respectives 1 et i .
Remarques1. Deux points sont confondus si et seulement si ils ont la même affixe.2. Deux vecteurs sont égaux si et seulement si ils ont la même affixe.
LYCÉE PONTUS DE TYARD Terminale VI
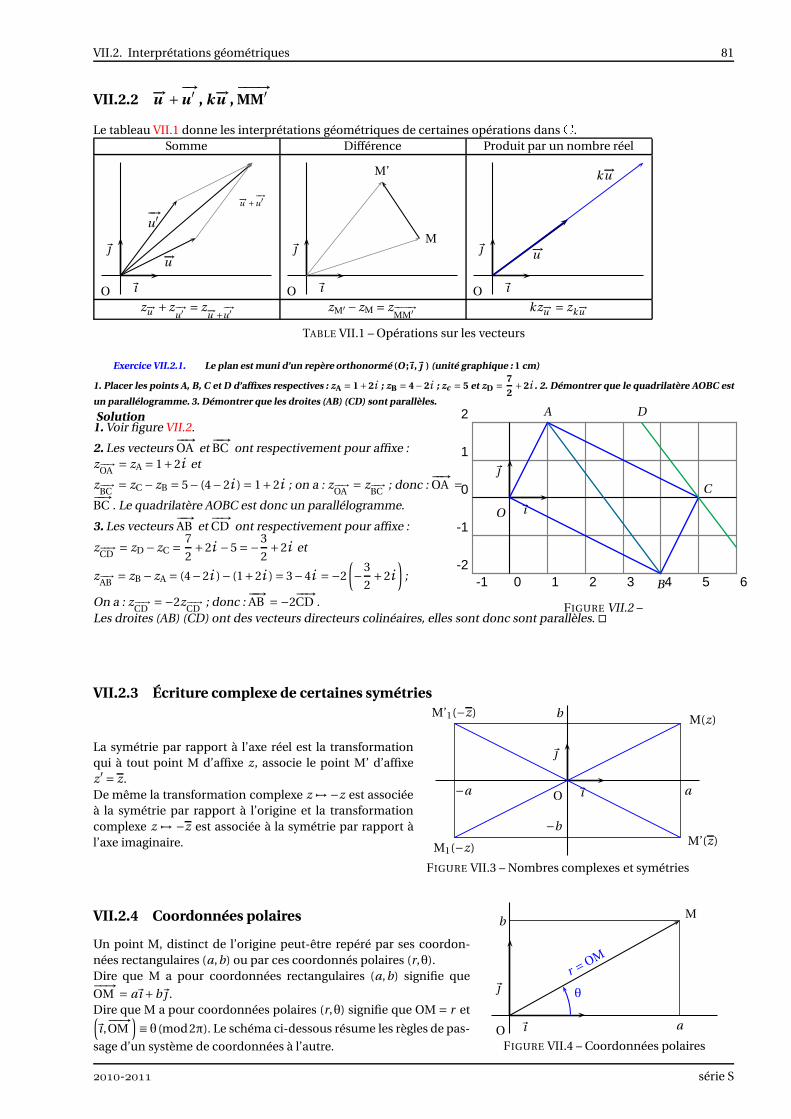
VII.2. Interprétations géométriques 81
VII.2.2 −→u +
−→u′ , k
−→u ,
−−−→MM′
Le tableau VII.1 donne les interprétations géométriques de certaines opérations dansC.Somme Différence Produit par un nombre réel
~ı
~
O
−→u′
−→u
−→u +−→u′
~ı
~
O
M’
M
~ı
~
O
k−→u
−→u
z−→u + z−→u′ = z−→
u +−→u′ zM′ − zM = z−−−−→
MM′ kz−→u = zk−→u
TABLE VII.1 – Opérations sur les vecteurs
Exercice VII.2.1. Le plan est muni d’un repère orthonormé (O ;~ı ,~ ) (unité graphique : 1 cm)
1. Placer les points A, B, C et D d’affixes respectives : zA = 1+2i ; zB = 4−2i ; zc = 5 et zD =7
2+2i . 2. Démontrer que le quadrilatère AOBC est
un parallélogramme. 3. Démontrer que les droites (AB) (CD) sont parallèles.
Solution1. Voir figure VII.2.
2. Les vecteurs−−→OA et
−−→BC ont respectivement pour affixe :
z−−→OA
= zA = 1+2i et
z−−→BC
= zC − zB = 5− (4−2i ) = 1+2i ; on a : z−−→OA
= z−−→BC
; donc :−−→OA =
−−→BC . Le quadrilatère AOBC est donc un parallélogramme.
3. Les vecteurs−−→AB et
−−→CD ont respectivement pour affixe :
z−−→CD
= zD − zC =7
2+2i −5 =−
3
2+2i et
z−−→AB
= zB − zA = (4−2i )− (1+2i ) = 3−4i =−2
(
−3
2+2i
)
;
On a : z−−→CD
=−2z−−→CD
; donc :−−→AB =−2
−−→CD .
-1 0 1 2 3 4 5 6-2
-1
0
1
2
~ı
~
O
A
B
C
D
FIGURE VII.2 –Les droites (AB) (CD) ont des vecteurs directeurs colinéaires, elles sont donc sont parallèles.
VII.2.3 Écriture complexe de certaines symétries
La symétrie par rapport à l’axe réel est la transformationqui à tout point M d’affixe z, associe le point M’ d’affixez ′ = z.De même la transformation complexe z 7→ −z est associéeà la symétrie par rapport à l’origine et la transformationcomplexe z 7→ −z est associée à la symétrie par rapport àl’axe imaginaire.
~ı
~
O a−a
b
−b
M(z)
M’(z)
M’1(−z)
M1(−z)
FIGURE VII.3 – Nombres complexes et symétries
VII.2.4 Coordonnées polaires
Un point M, distinct de l’origine peut-être repéré par ses coordon-nées rectangulaires (a,b) ou par ces coordonnés polaires (r,θ).Dire que M a pour coordonnées rectangulaires (a,b) signifie que−−→OM = a~ı +b~ .Dire que M a pour coordonnées polaires (r,θ) signifie que OM = r et(
~ı,−−→OM
)
≡ θ (mod 2π). Le schéma ci-dessous résume les règles de pas-
sage d’un système de coordonnées à l’autre.
~ı
~
O a
b
θ
r =OM
M
FIGURE VII.4 – Coordonnées polaires
- série S
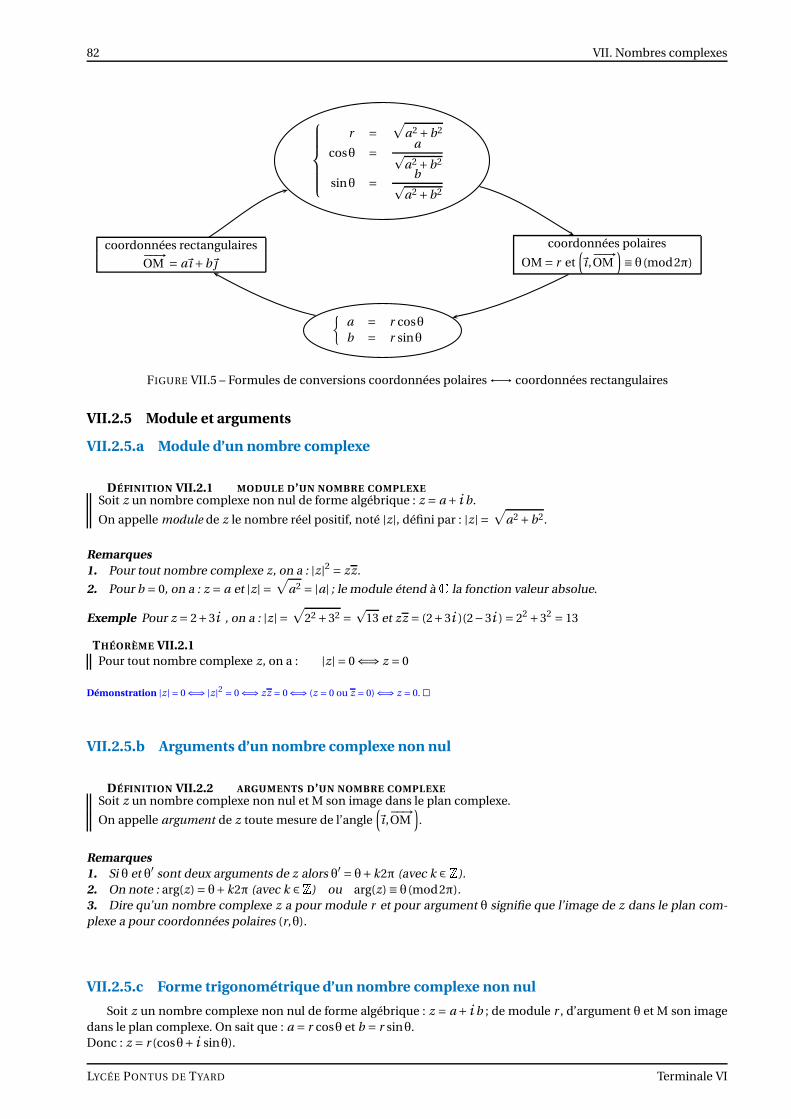
82 VII. Nombres complexes
coordonnées rectangulaires−−→OM = a~ı +b~
coordonnées polaires
OM = r et(
~ı,−−→OM
)
≡ θ (mod2π)
r =√
a2 +b2
cosθ =a
pa2 +b2
sinθ =b
pa2 +b2
a = r cosθb = r sinθ
FIGURE VII.5 – Formules de conversions coordonnées polaires ←→ coordonnées rectangulaires
VII.2.5 Module et arguments
VII.2.5.a Module d’un nombre complexe
DÉFINITION VII.2.1 MODULE D’UN NOMBRE COMPLEXESoit z un nombre complexe non nul de forme algébrique : z = a + i b.
On appelle module de z le nombre réel positif, noté |z|, défini par : |z| =√
a2 +b2.
Remarques1. Pour tout nombre complexe z, on a : |z|2 = zz.
2. Pour b = 0, on a : z = a et |z| =√
a2 = |a| ; le module étend àC la fonction valeur absolue.
Exemple Pour z = 2+3i , on a : |z| =√
22 +32 =p
13 et zz = (2+3i )(2−3i ) = 22 +32 = 13
THÉORÈME VII.2.1Pour tout nombre complexe z, on a : |z| = 0 ⇐⇒ z = 0
Démonstration |z| = 0 ⇐⇒ |z|2 = 0 ⇐⇒ zz = 0⇐⇒ (z = 0 ou z = 0) ⇐⇒ z = 0. ä
VII.2.5.b Arguments d’un nombre complexe non nul
DÉFINITION VII.2.2 ARGUMENTS D’UN NOMBRE COMPLEXESoit z un nombre complexe non nul et M son image dans le plan complexe.
On appelle argument de z toute mesure de l’angle(
~ı,−−→OM
)
.
Remarques1. Si θ et θ′ sont deux arguments de z alors θ′ = θ+k2π (avec k ∈Z).2. On note : arg(z)= θ+k2π (avec k ∈Z) ou arg(z)≡ θ (mod2π).3. Dire qu’un nombre complexe z a pour module r et pour argument θ signifie que l’image de z dans le plan com-plexe a pour coordonnées polaires (r,θ).
VII.2.5.c Forme trigonométrique d’un nombre complexe non nul
Soit z un nombre complexe non nul de forme algébrique : z = a + i b ; de module r , d’argument θ et M son imagedans le plan complexe. On sait que : a = r cosθ et b = r sinθ.Donc : z = r (cosθ+ i sinθ).
LYCÉE PONTUS DE TYARD Terminale VI

VII.3. Propriétés algébriques 83
DÉFINITION VII.2.3 FORME TRIGONOMÉTRIQUE D’UN NOMBRE COMPLEXE
Soit z un nombre complexe non nul de module r et d’argument θ.On appelle forme trigonométrique de z l’écriture : z = r (cosθ+ i sinθ).
Exemples 1+ i =p
2
2
(
cosπ
4+ i sin
π
4
)
et −1
2+ i
p3
2= cos
2π
3+ i sin
2π
3
Remarques1. On passe de la forme algébrique à la forme trigonométrique d’un nombre complexe non nul de la même façonqu’on transforme des coordonnées rectangulaires en coordonnées polaires (cf. figure §VII.5 page 82) ;2. Soit z = r (cosθ+ i sinθ), r ∈R∗ et θ ∈R ;
– si r > 0 alors la forme trigonométrique de z est z = r (cosθ+ i sinθ) et arg(z)≡ θ [2π] ;– si r < 0 alors la forme trigonométrique de z est z =−r
(
cos(θ+π)+ i sin(θ+π))
et arg(z)≡ θ+π (mod2π).
Exemple La forme trigonométrique de −2(
cosπ
6+ i sin
π
6
)
est : 2
(
cos−5π
6+ i sin−
5π
6
)
.
On déduit de l’étude menée §VII.2.4 que deux nombres complexes non nuls ont même argument (modulo 2π) etmême module si et seulement si ils ont même partie réelle et même partie imaginaire. Le théorème VII.1.2 permetalors d’établir le théorème suivant.
THÉORÈME VII.2.2Soit z et z ′ deux nombres complexes non nuls.On a : z = z ′ si et seulement si |z| = |z ′| et arg(z)≡ arg(z ′) (mod2π).
VII.3 Propriétés algébriques
VII.3.1 Propriétés du conjugué
Les propriétés suivantes sont des conséquences immédiates de la définition VII.1.3 p. 78.THÉORÈME VII.3.1
Soit z un nombre complexe de forme algébrique : z = a + i b.
(1) z = z ; (2) zz = a2 +b2 = |z|2 ;(3) z + z = 2ℜe(z) ; (4) z − z = 2i ℑm(z) ;(5) z est réel si et seulement si z = z ; (6) z est imaginaire pur si et seulement si z =−z ;
Exemples
1. 3+2i = 3−2i = 3+2i2. (−3+2i )+ (−3−2i ) =−6
3. (−3+2i )(−3−2i ) = (−3)2 − (−4) = 134. (−3+2i )− (−3−2i ) = 4i
THÉORÈME VII.3.2Pour tous nombres complexes z et z ′, pour tout entier relatif n, on a :
(1) z + z ′ = z + z ′ ;
(2) −z =−z ;
(3) zz ′ = z × z ′ ;
(4)
(1
z
)
=1
z(z , 0) ;
(5)
(z ′
z
)
=z ′
z(z , 0) ;
(6) zn = zn (z , 0) ;
Démonstration Introduisons les formes algébriques de z et z′ : z = a + i b et z′ = a′+ i b′.
On en déduit immédiatement (1)et (2).
(3) On a : zz′ = (aa′ −bb′)+ i (ab′ +a′b) et zz′ = (a − i b)(a′ − i b′)= (aa′ −bb′)− i (ab′ +a′b) ;
donc : zz′ = z × z′.
(4) Pour z , 0, on a : z ×1
z= 1⇐⇒ z ×
1
z= 1⇐⇒ z ×
(1
z
)
= 1 ⇐⇒ z ×1
z= 1 ⇐⇒
1
z=
1
z;
donc :1
z=
1
z.
(5) Pour z , 0, on a :
(z′
z
)
= z′×1
z= z′×
(1
z
)
= z′×1
z=
z′
z;
(6) Pour n > 0 la propriété est obtenue en appliquant n −1 fois la propriété (3).
Pour n < 0 on a −n > 0 et donc : zn =(
1
z−n
)
=1
z−n=
1−n
z−n =(
1
z
)−n
= zn ä
- série S

84 VII. Nombres complexes
VII.3.2 Propriétés du module et des arguments
THÉORÈME VII.3.3Pour tous nombres complexes non nuls z et z ′, pour tout entier relatif n, on a :
(1) |z + z ′| É |z|+ |z ′| (inégalité triangulaire)
(2) |zz ′| = |z|× |z ′| et arg(zz ′) ≡ arg(z)+arg(z ′) (mod2π)
(3)
∣∣∣∣
1
z
∣∣∣∣ =
1
|z|et arg
(1
z
)
≡ −arg(z) (mod 2π)
(4)
∣∣∣∣
z ′
z
∣∣∣∣ =
|z ′||z|
et arg
(z ′
z
)
≡ arg(z ′)−arg(z) (mod2π)
(5) |zn | = |z|n et arg(zn) ≡ n arg(z) (mod2π)
Démonstration
(1) L’inégalité triangulaire se déduit de l’interprétation géométrique de |z + z′|.Introduisons les formes trigonométriques de z et z′ : z = r (cosθ+ i sinθ) et z′ = r ′(cosθ′+ i sinθ′).
(2) On a : zz′ = r (cosθ+ i sinθ)r ′(cosθ′+ i sinθ′)= r r ′
[
(cosθcosθ′− sinθsinθ′)+ i (cosθsinθ′+cosθ′− sinθ)]
= r r ′(cos(θ+θ′)+ i sin(θ+θ′)
)
On en déduit la propriété.
(3) On a :1
z=
z
|z|2=
r
r 2(cosθ− i sinθ) =
1
r
(
cos(−θ)+ i sin(−θ))
.
On en déduit la propriété.
(4) On a :z′
z= z′×
1
z= r ′(cosθ′+ i sinθ′)
1
r
(cos(−θ)+ i sin(−θ)
)
=r ′
r
[(cosθ′ cos(−θ)− sinθ′ sin(−θ)
)+ i
(cosθ′ sin(−θ)+ sinθ′ cos(−θ)
)]
=r ′
r
(
cos(θ′−θ)+ i sin(θ′−θ))
.
On en déduit la propriété.
(5) Pour n = 0, la propriété est immédiate.
Pour n > 0 la propriété est obtenue en appliquant n −1 fois la propriété (2).
Pour n < 0 on a −n > 0 et donc, d’après (3) : zn =1
z−n=
1
r−n(
cos(−nθ)+ i sin(−nθ)) = r n (
cos(nθ)+ i sin(nθ))
.
On en déduit la propriété. ä
Remarques1. Le module est utilisé pour définir la distance entre deux nombres complexes. La distance entre z et z ′ est |z ′− z|.2. On dira qu’une suite (zn) de nombres complexes converge vers un nombre complexe ℓ si la distance entre zn et l
tend vers 0 lorsque n tend vers +∞ ; c’est-à-dire si la suite réelle de terme général |zn −ℓ| converge vers 0.3. En particulier une suite géométrique de terme général : zn = w × qn (w ∈C et q ∈C) converge vers 0 si et seule-ment si |q| < 1, en effet : |zn | = |w |× |q|n .
On démontre, comme dansR, que pour |q| < 1, la suite de terme général :n∑
k=0
(
w qk)
; converge vers :w
1−q.
VII.3.3 Formule de MOIVRE (complément)
Pour r = 1 dans l’identité (5) du théorème VII.3.3, on obtient le théorème suivant.THÉORÈME VII.3.4 FORMULE DE MOIVRE 1
Pour tout nombre réel θ et tout nombre entier relatif n, on a :
(cosθ+ i sinθ)n = cos(nθ)+ i sin(nθ)
Exercice VII.3.1. Déterminer la forme algébrique de : z =(
1+ ip
3
2
)2003
.
Solution On a : z =(
1+ ip
3
2
)2003
=(
cosπ
3+ i sin
π
3
)2003= cos
(
2003π
3
)
+ i sin(
2003π
3
)
.
Or :2003
3π=
2004−1
3π=
6×334−1
3π= 334×2π−
π
3.
Donc : z = cos(
−π
3
)
+ i sin(
−π
3
)
=1
2− i
p3
2.
1. MOIVRE (ABRAHAM DE) Vitry-le-François 1667 - Londres 1754, mathématicien britannique d’origine française. Il précisa les principes ducalcul des probabilités et introduisit la trigonométrie des quantités imaginaires, énonçant implicitement la formule qui porte son nom.
LYCÉE PONTUS DE TYARD Terminale VI

VII.4. Notation exponentielle 85
Remarque Depuis la rentrée de septembre 2001, la formule de MOIVRE n’est plus au programme de Terminale S.
VII.4 Notation exponentielle
VII.4.1 Une équation différentielle
Considérons la fonction :f :R −→ C
t 7−→ cos(t)+ i sin(t).
Soit t un nombre réel. Les fonctions cos et sin sont dérivables en t et ont respectivement pour nombre dérivés −sin(t)et cos(t) ; il existe donc deux fonctions εr et εi telles que : lim
0εr = lim
0εi = 0 ; et pour tout réel h :
cos(t +h) = cos(t)−h sin(t)+hεr (h); (VII.1)
sin(t +h) = sin(t)+h cos(t)+hεi (h). (VII.2)
Introduisons la fonction ε deR versC définie par : ε= εr + i εi . On a : |ε| =√
ε2r +ε2
i; donc par produit et somme des
limites puis par composition par la fonction racine carrée : lim0
ε= 0. De plus, pour tout réel h :
f (t +h) = cos(t +h)+ i sin(t +h)= (cos(t)−h sin(t)+hεr (h))+ i (sin(t)+h cos(t)+hεi (h))= f (t)+h
(
− si n(t)+ i cos(t))
+h(
εr (h)+ i εi (h))
= f (t)+hi f (t)+hε(h).On en déduit que la fonction f est dérivable surR et que sa dérivée est la fonction : i f . On a donc :
f ′ = i f et f (0) = 1.
On reconnaît une équation différentielle d’ordre 1 avec une condition initiale dont la solution formelle est la fonction,
f : t 7−→ ei t .
Notation Pour tout nombre réel θ, on convient de noté ei θ, le nombre complexe d’argument θ et de module 1. On a
donc : ei θ = cosθ+ i sinθ.
VII.4.2 Définitions et propriétés
DÉFINITION VII.4.1 FORME EXPONENTIELLE D’UN NOMBRE COMPLEXE NON NULSoit z un nombre complexe non nul de module r et d’argument θ .
On appelle forme exponentielle de z l’écriture : z = r ei θ.
Exemples1. 1 = ei 0 ;2. 1+ i =
p2ei
π4 ;
3. 1− i =p
2e−iπ4 ;
4. −1 = ei π ;5. i = ei
π2 ;
6. 1+ ip
3 = 2eiπ3 ;
Remarque Pour tous nombres réels r et θ :∣∣∣r ei θ
∣∣∣= |r |×
∣∣∣ei θ
∣∣∣= |r |.
Sous forme exponentielle, le théorème VII.3.3 s’écrit de la façon suivante.THÉORÈME VII.4.1
Soit z et z ′ deux nombres complexes non nuls de forme exponentielle : z = r ei θ et z ′ = r ′ ei θ′; et n un entier relatif, on
a :
(1)∣∣z + z ′∣∣É r + r ′ ;
(2) zz ′ = r r ′ei (θ+θ′) ;(3)
1
z=
1
re−i θ ; (4)
z ′
z=
r ′
rei (θ′−θ′) ;
(5) zn = r nei nθ.
- série S

86 VII. Nombres complexes
VII.4.3 Forme exponentielle et symétries usuelles
Le théorème suivant est une conséquence immédiate de l’étude menée §VII.2.3. p. 81THÉORÈME VII.4.2
Soit z un nombre complexe non nul de forme exponentielle : z = r ei θ.Les formes exponentielles de z, −z et −z sont :
z = r e−i θ ; −z = r ei (θ+π) ; −z = r ei (π−θ).
Exemple Pour z = 2e2i π
3 , on obtient : z = 2e−2i π
3 ; −z = 2e−i π3 et −z = 2e
i π3 .
VII.4.4 Formules d’EULER
D’après les formules (2) et (5) théorème VII.3.1, on a pour tout nombre complexe z :
ℜe(z) =z + z
2et ℑm(z) =
z − z
2i.
En particulier pour z = ei θ, on obtient le théorème suivant.THÉORÈME VII.4.3 FORMULES D’EULER 2
Pour tout nombre réel θ, on a :
cosθ=ei θ+e−i θ
2et sinθ=
ei θ−e−i θ
2i.
VII.4.5 Racines carrées d’un nombre complexe
On appelle racine carrée d’un nombre complexe Z tout nombre complexe z vérifiant : z2 = Z.Par exemple 2 a deux racines carrées :
p2 et −
p2 ; −1 a également deux racines carrées : i et −i .
L’écriturep
Z n’a de sens que si Z est un réel positif.THÉORÈME VII.4.4
Soit Z un nombre complexe non nul de forme exponentielle : Z = r ei θ.
z a exactement deux racines complexes : z1 =p
r eiθ2 et z2 =
pr ei
(θ2+π
)
Démonstration Les racines carrées de Z, sont les solutions dansC de l’équation, d’inconnue z, (E) : z2 =Z.
On remarque que le nombre z1 =p
r eiθ2 est solution de (E), en effet : z2
1 =(p
r eiθ2
)2= r ei θ =Z ; donc :
(E) ⇐⇒ z2 = z21 ⇐⇒ z2 − z2
1 = 0 ⇐⇒ (z − z1)(z + z1) = 0.
Un produit de facteurs est nul si et seulement si l’un au moins des facteurs est nul ; Z a donc exactement deux racines carrées : z1 et z2 = −z1 =p
r ei
(θ2 +π
)
. äRemarques
1. 0 n’a qu’une racine carrée : 0.2. Les deux racines carrées d’un nombre complexe non nul sont opposées.3. Le théorème VII.4.4 permet d’obtenir les racines carrées d’un nombre complexe écrit sous forme exponentielle ;une méthode permettant de déterminer les racines carrées d’un nombre complexe écrit sous forme algébrique estproposée §VII.6.4.
VII.5 Nombres complexes et polynômes (compléments)
Dans cette partie l’étude des démonstrations est facultative.
2. EULER (LEONHARD) Bâle 1707 - Saint-Pétersbourg 1783, mathématicien suisse. Il fut, au XVIIIe siècle, le principal artisan de l’essor del’analyse, qu’il réorganisa autour du concept fondamental de fonction. Il exerça son inventivité dans de nombreux domaines de la physique ma-thématique.
LYCÉE PONTUS DE TYARD Terminale VI

VII.5. Nombres complexes et polynômes (compléments) 87
VII.5.1 Théorème fondamental de l’algèbre
THÉORÈME VII.5.1 THÉORÈME FONDAMENTAL DE L’ALGÈBRESoit P un polynôme à coefficients complexes et α un nombre complexe.α est racine de P si et seulement si il existe un polynôme Q tel que, pour tout nombre complexe z,
P(z)= (z −α)Q(z).
Démonstration Si, pour tout nombre complexe z : P(z) = (z −α)Q(z) ; alors, pour z =α, on obtient : P(α) = (α−α)Q(α) = 0 ; et donc α est racine de P.Réciproquement, démontrons que si α est racine de P alors il existe un polynôme Q tel que, pour tout nombre complexe z, P(z) = (z −α)Q(z).Si P est le polynôme nul, l’implication est immédiate car n’importe quel polynôme Q convient ; nous supposons désormais le polynôme P non nul.P est alors défini par une expression du type : ∀z ∈C, P(z) = an zn + . . .+a1z +a0 (avec an , 0).On introduit donc le polynôme T défini par : T(z) = P(z +α). T est la composée d’un polynôme de degré 1 par un polynôme de degré n, T est doncun polynôme de degré n. Il est par conséquent défini par une expression du type : T(z) = bn zn + . . .+b1z +b0.
Or : T(0) = P(0+α) = 0 ; donc : b0 = 0 et ∀z ∈C, T(z) = z(
bn zn−1 + . . .+b1
)
.
On en déduit que pour tout nombre complexe z : P(z) =T(z −α) = (z −α)(
bn (z −α)n−1 + . . .+b1
)
︸ ︷︷ ︸
Q(z)
.
la propriété est alors démontrée est introduisant le polynôme Q défini par : Q(z) = bn (z −α)n−1 + . . .+b1. äLe lemme suivant est une conséquence du théorème fondamental de l’algèbre.LEMME VII.5.2Un polynôme non nul de degré inférieur ou égal à n a au plus n racines distinctes.
Démonstration Raisonnons par récurrence sur le degré de P.Un polynôme non nul de degré inférieur ou égal à 0 est un polynôme constant non nul, il n’a donc pas de racine et la propriété est démontrée pourn = 0.
Il ne reste plus qu’à démontrer que si pour un certain entier naturel k, tout polynôme non nul de degré inférieur ou égal à k a au plus k racines
distinctes, alors tout polynôme non nul de degré inférieur ou égal à k +1 a au plus k +1 racines distinctes.
Soit P un polynôme de degré inférieur ou égal à k+1 ayant plus de k+1 racines distinctes et soit α l’une d’elle. On aura pour tout nombre complexe
z : P(z) = (z −α)Q(z) ; où Q est un polynôme de degré inférieur ou égal à k. P ayant plus de k +1 racines distinctes, Q a plus k racines distinctes et
d’après l’hypothèse de récurrence, Q est donc le polynôme nul ; d’où, par produit, P est le polynôme nul.
Donc, par récurrence, un polynôme non nul de degré n (n ∈N) a au plus n racines distinctes. äTHÉORÈME VII.5.3(1) Un polynôme de degré n a au plus n racines distinctes.(2) Deux polynômes de degrés inférieurs ou égaux à n coïncidant en (n+1) valeurs distinctes sont égaux.
Démonstration (1) est une conséquence immédiate de lemme précédent.
(2) Si P et T sont deux polynômes de degré inférieurs ou égaux à n coïncidant en (n + 1) valeurs distinctes alors P-T est un polynôme degré
inférieur ou égal à n qui a n +1 racines distinctes ; donc d’après le lemme, P−T est le polynôme nul ; d’où : P = T. ä
VII.5.2 Résolution des équations du second degré
VII.5.2.a Factorisation d’un trinôme du second degré
On se propose de factoriser dansC le polynôme P défini par : P(z)= az2 +bz +c
où a, b et c sont des nombres complexes avec a , 0.Procédons, comme en classe de Première dans la cas réel, en utilisant la forme canonique. Pour tout nombre com-plexe z, on a :
P(z) = a
(
z2 +2b
2az +
c
a
)
, car a , 0
= a
[(
z +b
2a
)2
−b2
4a2+
c
a
]
= a
[(
z +b
2a
)2
−b2 −4ac
4a2
]
.
On introduit le nombre ∆, appelé discriminant de l’équation ou du trinôme, défini par : ∆= b2 −4ac.
Si ∆= 0, alors : P(z)= a
(
z +b
2a
)2
.
Si ∆, 0 et on introduit δ une racine carrée complexe de ∆. On a alors :
- série S
88 VII. Nombres complexes
P(z) = a
[(
z +b
2a
)2
−δ2
(2a)2
]
= a
(
z +b
2a+
δ
2a
)(
z +b
2a−
δ
2a
)
= a
(
z −−b −δ
2a
)(
z −−b +δ
2a
)
On déduit de cette étude le théorème suivant.THÉORÈME VII.5.4
(1) Tout trinôme du second degré à coefficients complexes peut se décomposer en produit de deux facteurs dedegré 1.(2) Les racines du polynôme d’indéterminée z : az2 +bz +c ;où a, b et c sont des nombres complexes avec a , 0, sont :
z1 =−b −δ
2aet z2 =
−b +δ
2a
où δ est l’une des deux racines carrées complexes du discriminant : ∆= b2 −4ac.On a alors la factorisation :
az2 +bz +c = a (z − z1) (z − z2)Remarques1. Les racines carrées de ∆ sont δ et −δ, donc remplacer δ par −δ ne fait qu’échanger z1 et z2.2. Lorsque ∆= 0 les racines carrées du discriminant sont égales et on a : z1 = z2.3. Lorsque ∆, 0, on a : z1 , z2.
Exercice VII.5.1. 1. Déterminer, sous forme algébrique, les racines carrées de 2i .
2. Factoriser le trinôme : P(z) = (1− i )z2 −p
2z +1
2.
Solution 1. On a : 2i = 2eiπ2 =
(p2ei
π4
)2=
(p2(
cosπ
4+ i sin
π
4
))2=
(
p2
( p2
2+ i
p2
2
))2
= (1+ i )2 ;
Les racines carrées complexes de 2i sont donc : 1+ i et −1− i .
2. Le discriminant du trinôme est : ∆=(
−p
2)2−4(1− i )×
1
2= 2i = (1+ i )2 ;
il admet donc deux racines : z1 =p
2+ (1+ i )
2(1− i )=
p2(1+ i )+ (1+ i )2
2(12 +12)=
p2(1+ i )+2i
4=
p2
4+ i
2+p
2
4
et z2 =p
2− (1+ i )
2(1− i )=
p2(1+ i )−2i
4=
p2
4+ i
−2+p
2
4.
Donc : P(z) = (1− i )
(
z −p
2
4− i
2+p
2
4
)(
z −p
2
4− i
−2+p
2
4
)
VII.5.2.b Résolution d’équations du second degré
On se propose de résoudre dansC l’équation, d’inconnue z, (E) : az2 +bz +c = 0 ;où a, b et c sont des nombres complexes avec a , 0.Reprenons les notations du théorème VII.5.4 ; on a :az2 +bz +c = 0 ⇐⇒ a (z − z1)(z − z2) = 0 ⇐⇒ (z = z1 ou z = z2).
On en déduit que lorsque ∆= 0, l’équation admet une solution double : z =−b
2a.
Lorsque ∆, 0, l’équation admet deux solutions distinctes.Exemples1. Exercice VII.5.2. Résoudre dansC, (E) : 2z2 +3z +3 = 0
Le discriminant est : ∆= 32 −4×2×3 =−15 =(
ip
15)2
; donc : S =
−3− ip
15
4;−3+ i
p15
4
.
2. Exercice VII.5.3. Résoudre dansC, (E) : 2z2 +3z −1 = 0
Le discriminant est : ∆= 32 −4×2× (−1) = 17 =(p
17)2
; donc : S =
−3−p
17
4;−3+
p17
4
LYCÉE PONTUS DE TYARD Terminale VI

VII.6. Utilisation des nombres complexes (compléments) 89
VII.5.2.c Somme et produit de racines
Reprenons les notations du théorème VII.5.4 ; pour tout nombre complexe z on a :
az2 +bz +c = a (z − z1)(z − z2) = az2 −a(z1 + z2)z +az1z2
On en déduit, par identifications, que : b =−a(z1 + z2) et c = az1z2.D’où l’on tire le théorème suivant.
THÉORÈME VII.5.5Soit az2 +bz +c un trinôme du second degré (a , 0), S la somme et P le produit des racines. On a :
S =−b
aet P =
c
aExemple Exercice VII.5.4. Résoudre : 3z2 +4z −1= 0.
On remarque que 1 est solution évidente, on sait que le produit des solutions dansC est −1
3donc l’autre solution est :
−1
3; d’où : S=
1;−1
3
VII.6 Utilisation des nombres complexes (compléments)
Dans toute cette partie n désigne un entier naturel tel que : n Ê 2.
VII.6.1 Racines n-ièmes de l’unité
On appelle racine n-ième de l’unité tout nombre complexe z vérifiant : zn = 1.Les racines n-ièmes de l’unité sont donc les racines du polynôme de degré n : zn −1 ;il y a donc au plus n racines n-ièmes de l’unité distinctes.
Pour tout entier k le nombre eki 2πn est racine n-ième de l’unité ; en effet :
(
eki 2πn
)n= ei k2π = 1.
De plus deux entiers k et k ′ génèrent la même racine si et seulement si eki 2πn = ek ′i 2π
n ; c’est-à-dire : ei 2π k−k′n = 1 ;
ce qui signifie que k − k ′ est multiple de n c’est-à-dire que k etk ′ ont le même reste par la division par n. Or les restes possiblespar la division par n sont les entiers compris entre 0 et n −1 ; onobtient donc toute les racines n-ièmes de l’unité en faisant variék de 0 à n−1.Sur la figure ci-contre, pour tout k, Mk est le point d’affixe eki 2π
n .Si z est une racine n-ième de l’unité, alors zn = zn = 1 = 1 ; doncz est également une racine n-ième de l’unité. On en déduit qu’àpart 1 et éventuellement −1 (lorsque n est pair) les racines n-ièmes de l’unité sont deux à deux conjuguées.Lorsqu’on effectue la somme des racines n-ièmes de l’unité, on
obtient : S = 1 +(
ei2πn
)
+(
ei2πn
)2+
(
ei2πn
)3+ ·· · +
(
ei2πn
)n−1. On
reconnaît la somme des termes d’une suite géométrique, donc :
S =1−
(
ei2πn
)n
1−(
ei2πn
) = 0.
La somme des racines n-ièmes de l’unité est nulle.
~ı
~
O
M0
M1
Mk
Mk+1
Mn−1
2π
n
FIGURE VII.6 – Racines n-ièmes de l’unité
VII.6.2 Racines n-ièmes d’un nombre complexe non nul
Soit Z un nombre complexe non nul. On appelle racine n-ième de Z tout nombre complexe z vérifiant : zn = Z.Les racines n-ièmes de Z sont donc les racines du polynôme de degré n : zn −Z ;il y a donc au plus n racines n-ièmes de Z distinctes.
Soit r le module et θ un argument de Z. Posons : w =z
np
rei
θn . On a donc : z = np
r eiθn w . On en déduit que : zn =
Z ⇐⇒(
npr ei
θn
)nwn = Z ⇐⇒ Zwn = Z ⇐⇒ wn = 1 (car Z, 0.
z est donc racine n-ième de Z si et seulement si w est racine n-ième de l’unité. On sait qu’il y a n racines n-ième de
- série S

90 VII. Nombres complexes
l’unité distinctes, il y donc également n racines n-ième de Z distinctes, ce sont les nombres de la forme : npr ei
θn w où
w est une racine n-ième de l’unité. Les racines n-ième de Z sont donc les nombres de la forme :
npr ei
θ+k2πn (avec k ∈Z).
On établi de la même façon qu’en VII.6.1 que la somme des racines n-ièmes de Z est nulles.Exercice VII.6.1. Déterminer les racines quatrièmes de 1+ i .
Solution On a : 1+ i =p
2eiπ4 ; donc :
(8p
2eiπ16
)4= 1+ i . On sait que les racines quatrièmes de l’unité sont : 1 ; i ; −1
et −i ; les racines quatrièmes de 1+ i sont donc :8p
2eiπ16 ; i
8p2ei
π16 ; − 8p
2eiπ16 et −i 8p
2eiπ16 ; c’est-à-dire :
8p2ei
π16 ;
8p2ei
9π16 ;
8p2ei
17π16 ;
8p2ei
25π16 .
VII.6.3 Polynômes
VII.6.3.a Factorisation de polynômes symétriques
Considérons le polynôme : 2z3 +3z2 +3z +2 ;on observe une symétrie dans les coefficients : 2 ; 3 ; 3 ; 2.On dit que le polynôme est symétrique.
Plus généralement un polynôme de degré n :n∑
k=0ak zk ;
est dit symétrique lorsque pour tout entier naturel k (k É n), on a : ak = an−k .Exercice VII.6.2. On se propose de factoriser, dansC puis dansR, le polynôme P défini par :
P(z) = 4z6 +4z5 +21z4 +17z3 +21z2 +4z +4.
1. a. Démontrer que si un nombre complexe α est racine de P, alors son conjugué α est également racine de P.b. 0 est-il racine de P ?
c. Démontrer que si un nombre complexe α est racine de P, alors son inverse1
αest également racine de P.
2. a. Calculer P(2i ).b. En déduire trois autres racines de P.c. Décomposer P en produit d’un facteur de degré 4 par un facteur de degré 2.
3. a. Factoriser le polynôme : Q(z) = z2 + z +1.b. Décomposer P(z) sous forme d’un produit de six facteurs de degré 1 à coefficients complexes.
c. Décomposer P(z) sous forme d’un produit de trois facteurs de degré 2 à coefficients réels.
Solution 1. a. Soit α une racine de P, s’il en existe ; on a donc : P(α) = 0 ; d’où : P(α) = 0.Or : P(α) = 4α6 +4α5 +21α4 +17α3 +21α2 +4α+4
= 4α6 +4α5 +21α4 +17α3 +21α2 +4α+4= 4α6 +4α5 +21α4 +17α3 +21α2 +4α+4= P
(
α)
Donc si un nombre complexe α est racine de P, alors son conjugué α est également racine de P.b. P(0) = 4 et 4, 0 ; donc 0 n’est pas racine de P.
c. Soit α une racine de P, s’il en existe ; d’après 1.a., on a donc : α, 0 ; et donc1
αest défini.
De plus : P
(1
α
)
= 4
(1
α
)6
+4
(1
α
)5
+21
(1
α
)4
+17
(1
α
)3
+21
(1
α
)2
+4
(1
α
)
+4
= 41
α6+4
1
α5+21
1
α4+17
1
α3+21
1
α2+4
1
α+4
=1
α6
(
4+4α+21α2 +17α3 +21α4 +4α5 +4α6)
=P(α)
α6
Or : P(α) = 0 ; d’où : P
(1
α
)
= 0.
Donc si un nombre complexe α est racine de P, alors son inverse1
αest également racine de P.
2. a. Calculons P(2i ).
LYCÉE PONTUS DE TYARD Terminale VI

VII.6. Utilisation des nombres complexes (compléments) 91
P(2i ) = 4(2i )6 +4(2i )5 +21(2i )4 +17(2i )3 +21(2i )2 +4(2i )+4= 4×64× (−1)+4×32× i +21×16×1+17×8× (−i )+21×4× (−1)+4×2i +4
= −256+128i +336−136i −84+8i +4= 0
Donc 2i est racine de P.
b. 2i est racine de P, donc son conjugué, −2i et son inverse, −i
2sont également racines de P ; −
i
2est racine de P,
donc son conjugué,i
2est également racine de P.
Les nombres 2i , −2i ,i
2et −
i
2sont racines de P.
c. P est un polynôme de degré 6 admettant 2i pour racine, donc d’après le théorème fondamental de l’algèbre, ilexiste un polynôme Q1, de degré 5, tel que pour tout nombre complexe z : P(z) = (z −2i )Q1(z).On sait que : P(−2i ) = 0 et −2i n’est pas racine de (z −2i ) donc −2i est racine Q1. Il existe donc un polynôme Q2, dedegré 4, tel que pour tout nombre complexe z : Q1(z)= (z +2i )Q2(z) ; soit : P(z)= (z −2i )(z +2i )Q2(z).
En réitérant le procédé pouri
2et −
i
2, on en déduit qu’il existe un polynôme Q4, de degré 2, tel que pour tout nombre
complexe z : P(z)= (z −2i )(z +2i )(z −i
2)(z +
i
2)Q4(z).
Posons : Q=1
4Q4.
On a alors pour tout z deC : P(z) = 4(z −2i )(z +2i )(z −i
2)(z +
i
2)Q(z)
= (z −2i )(z +2i )(2z − i )(2z + i )Q(z)= (z2 +4)(4z2 +1)Q(z)= (4z4 +17z2 +4)Q(z)
Pour déterminer l’expression de Q(z) deux méthode s’offrent à nous, on peut procéder par identification ou effectuerla division euclidienne de 4z6 +4z5 +21z4 +17z3 +21z2 +4z +4 par 4z4 +17z2 +4.1re méthodeQ est un polynôme de degré 2, il a donc une expression de la forme : Q(z)= az2 +bz +c.On a donc pour tout z deC :
4z6 +4z5 +21z4 +17z3 +21z2 +4z +4 =(
4z4 +17z2 +4) (
az2 +bz +c)
= 4az6 +4bz5 + (4c +17a)z4 +17bz3 + (17c +4b)z2 +4bz +4c
Ces deux polynômes coïncident en une infinité de valeurs, ils sont donc égaux et par conséquent ils ont les mêmescoefficients ; a, b et c sont donc solutions du système :
4a = 44b = 4
17a +4c = 2117b = 174b +17c = 214b = 4
4c = 4
Le sous-système constitué de la 1re, la 2e, la 4e, la 6e et la 7e équation a pour unique solution : a = b = c = 1 ; et cettesolution est également solution des deux équations restantes, donc Q est le polynôme défini par : Q(z) = z2 + z +1.Donc, pour tout z deC : P(z)=
(
4z 4 +17z 2 +4)(
z 2 + z +1)
.2e méthodeEffectuons la division euclidienne de P(z) par 4z4 +17z2 +4.
4z6 +4z5 +21z4 +17z3 +21z2 +4z +4 4z4 +17z2 +44z5 +4z4 +17z3 +17z2 4z +4 z2 + z +1
4z4 +17z2 +40
Donc, pour tout z deC : P(z)=(
4z 4 +17z 2 +4)(
z 2 + z +1)
.
3. a. Le discriminant de Q est : ∆= 1−4 =−3 =(
ip
3)2
;
les racines de Q sont donc : j =−1
2+ i
p3
2et j =−
1
2− i
p3
2.
- série S

92 VII. Nombres complexes
De plus, le coefficient de degré 2 de Q est 1, on en déduit que pour tout z deC, on a :
Q(z) =(
z +1
2− i
p3
2
)(
z +1
2+ i
p3
2
)
.
b. D’après 2.c. et 3.a., on a donc pour tout z deC :
P(z)= (z −2i )(z +2i )(2z − i )(2z + i )
(
z +1
2− i
p3
2
)(
z +1
2+ i
p3
2
)
.
c. En effectuant le produit des facteurs dont les coefficients sont conjugués, on obtient alors pour tout z deC :
P(z) = (z 2 +4)(4z 2 +1)(
z 2 + z +1)
.
On remarque que 0 n’est jamais racine d’un polynôme symétrique de degré n :n∑
k=0ak zk ;
car : P(0) = a0 = an et an , 0.MM
Pour déterminer les racines d’un polynôme symétrique à coefficients réels, on peut combiner deux propriétés :
1. Si α est racine de P, alors α est également racine de P. Géométriquement, cela signifie que l’image de l’ensemble des racines de P estsymétrique par rapport à l’axe réel.
2. Si α est racine de P, alors1
αest également racine de P. Géométriquement, cela signifie, en utilisant la propriété précédente, que
l’ensemble des racines de P est invariant par la transformation du plan complexe privé de l’origine qui à tout point M d’affixe d’affixe
z associe le point M’ d’affixe z′ telle que : z′ =1
z.
Cette transformation est une inversion de pôle O et de puissance 1, on la rencontrera peut-être dans un exercice de géométrie.
On déduit de ces deux propriétés que si α est racine de P, alors α,1
αet
1
αsont également racines de P. Ce qui permet, lorsque ℑm(α), 1 et
|α|, 1, de faire apparaître dans P quatre facteurs de degré 1.
VII.6.3.b factorisation de xn − y n
EN PROJET
VII.6.4 Forme algébrique des racines carrées d’un nombre complexe
Soit Z un nombre complexe non nul de forme algébrique : Z = A+ i B ; on se propose de déterminer la forme algé-brique des racines carrées complexes de Z. On cherche donc les nombres z de forme algébrique : z = a+ i b ; tels que :z2 = Z.
On remarque que : |z|2 = |Z| ; les couples (a;b) cherchés sont donc les solutions du système :
a2 +b2 = |Z|a2 −b2 = ℜe(Z)2ab = ℑm(Z)
Pour résoudre ce système on utilise les deux premières équations pour déterminer a2 et b2, puis on se sert de la der-nière pour déterminer les signes relatifs de a et b.Exemples1. Exercice VII.6.3. Déterminer les racines carrées complexes de 2+3i .
On a : |2+3i | =√
22 +32 =p
13.Soit z un nombre complexe de forme algébrique : z = a + i b ; on a : z2 = (a2 −b2)+ i (2ab) et |z|2 = a2 +b2.
z est racine carrée de 2+3i si et seulement si (a;b) est solution du système : (Σ)
a2 +b2 =p
13a2 −b2 = 22ab = 3
.
(Σ) ⇐⇒
2a2 =p
13+22b2 =
p13−2
2ab = 3⇐⇒
a2 =p
13+2
2
b2 =p
13−2
22ab = 3
.
On a donc :
a =
√ p13+2
2ou a =−
√ p13+2
2
et
b =
√ p13−2
2ou b =−
√ p13−2
2
et a et b sont de même
signe.
Les racines carrées de 2+3i sont donc : z =
√ p13+2
2+ i
√ p13−2
2;
LYCÉE PONTUS DE TYARD Terminale VI

VII.6. Utilisation des nombres complexes (compléments) 93
et son opposé : −z =−
√ p13+2
2− i
√ p13−2
2.
2. Exercice VII.6.4. Déterminer cosπ
8et sin
π
8.
eiπ8 est une racine carrée de ei
π4 et : ei
π4 =
p2
2+ i
p2
2; donc :
cos2 π
8+ sin2 π
8= 1
cos2 π
8− sin2 π
8=
p2
2
soit 2cos2 π
8= 1+
p2
2et 2sin2 π
8= 1−
p2
2;
d’où : cos2 π
8=
2+p
2
4et sin2 π
8=
2−p
2
4.
On sait de plus que :π
8∈
[
0;π
2
]
; donc : cosπ
8Ê 0 et sin
π
8Ê 0 ;
d’où : cosπ
8=
√
2+p
2
2et sin
π
8=
√
2−p
2
2
VII.6.5 Trigonométrie
L’exponentielle complexe permet de retrouver assez rapidement beaucoup de formules de trigonométrie. Cettepartie du cours donne quelques exemples de façons de procéder.
VII.6.5.a Détermination de lignes trigonométriques particulières
Exercice VII.6.5. Déterminer les lignes trigonométriques deπ
12.
Solution On a :π
12=
π
3−π
4; donc :
eiπ12 = ei
π3 e−i
π4 =
(
1
2+ i
p3
2
)( p2
2− i
p2
2
)
=p
6+p
2
4+ i
p6−
p2
4; on en déduit que :
cosπ
12=ℜe
(
eiπ12
)
=p
6+p
2
4et sin
π
12=ℑm
(
eiπ12
)
=p
6−p
2
4;
d’où : tanπ
12=
p6−
p2
p6+
p2=
(p6−
p2)2
(p6+
p2)(p
6−p
2) =
8−2p
12
4= 2−
p3.
VII.6.5.b Formules usuelles de trigonométrie
Dérivées
D’un point de vue formel la dérivée de la fonction t 7→ ei t est la fonction t 7→ i ei t , or pour tout nombre réel t , on
a : i ei t =−sin(t)+ i cos(t). On retrouve ainsi facilement que la dérivée de cos est −sin et que la dérivée de sin est cos.
Transformation de produit en somme
Les formules transformations de produit en somme sont très faciles à retrouver.Soit a et b deux nombres réels, on a par exemple :
cos a cosb =ei a +e−i a
2·
ei b +e−i b
2=
1
4
(
ei (a+b) +ei (a−b)+ei (−a+b)+ei (−a−b))
=1
2
(
ei (a+b)+e−i (a+b)
2+
ei (a−b)+e−i (a−b)
2
)
.
On retrouve donc :
cos a cosb =1
2
(
cos(a +b)+cos(a −b))
Transformation de somme en produit
Les formules transformations de somme en produit sont également très faciles à retrouver. Soit p et q deux
nombres réels, on a d’une part : ei p +ei q = (cos p +cos q)+ i (sin p + sin q) ; d’autre part en remarquant que :
- série S
94 VII. Nombres complexes
p =p +q
2+
p −q
2et q =
p +q
2−
p −q
2; il vient :
ei p +ei q = eip+q
2
(
eip−q
2 +e−ip−q
2
)
= 2(
cosp +q
2+ i sin
p +q
2
)
cosp −q
2.
En identifiant parties réelles et parties imaginaires, il vient :
cos p +cos q = 2cosp +q
2cos
p −q
2
sin p + sin q = 2sinp +q
2cos
p −q
2
VII.6.5.c Linéarisation de polynômes en cos x et en sin x
VII.6.5.d Exercices divers
Exercice VII.6.6. Soit α un nombre réel. On considère la suite (Cn )n∈N définie par :
Cn =n∑
k=0
cos(kα)
2k.
Exprimer Cn , pour n ∈N, sans signe somme. En déduire la limite de la suite (Cn ).
Solution Il suffit d’introduire la suite (Sn )n∈N définie par : Sn =n∑
k=0
sin(kα)
2k.
On a alors, pour n ∈N⋆ :
Cn + i Sn =n∑
k=0
cos(kα)+ i sin(kα)
2k=
n∑
k=0
ei kα
2k=
n∑
k=0
(
ei α
2
)k
.
On reconnaît la somme des termes d’une suite géométrique, donc :
Cn + i Sn =1− ei (n+1)α
2n+1
1− ei α2
=
(
1− ei (n+1)α
2n+1
)(
1− e−i α
2
)
(
1− ei α2
)(
1− e−i α2
) =1− e−i α
2 − ei (n+1)α
2n+1 + ei nα
2n+2
1−cosα+ 14
;
d’où :
Cn + i Sn =
[
4−2cosα− cos(
(n+1)α)
2n−1 + cos(
nα)
2n
]
+ i[
2sinα− sin(
(n+1)α)
2n−1 + sin(
nα)
2n
]
5−4cosα.
On en déduit que pour tout entier naturel n :
Cn =ℜe(
Cn + i Sn
)
=4−2cosα− cos
(
(n+1)α)
2n−1 + cos(
nα)
2n
5−4cosα.
On sait que pour tout n ∈N :∣∣∣∣
cos(
(n+1)α)
2n−1
∣∣∣∣É
1
2n−1et
∣∣∣∣
cos(
nα)
2n
∣∣∣∣É
1
2n;
De plus : limn→+∞
1
2n−1= lim
n→+∞1
2n= 0 ; donc par comparaison :
limn→+∞
cos(
(n+1)α)
2n−1= lim
n→+∞
cos(
nα)
2n= 0.
Par somme puis par quotient on en déduit que :
limn→+∞
Cn =4−2cosα
5−4cosα.
VII.7 Géométrie et nombres complexes
Le plan P est muni d’un repère orthonormé direct (O;~ı ,~ ).
LYCÉE PONTUS DE TYARD Terminale VI
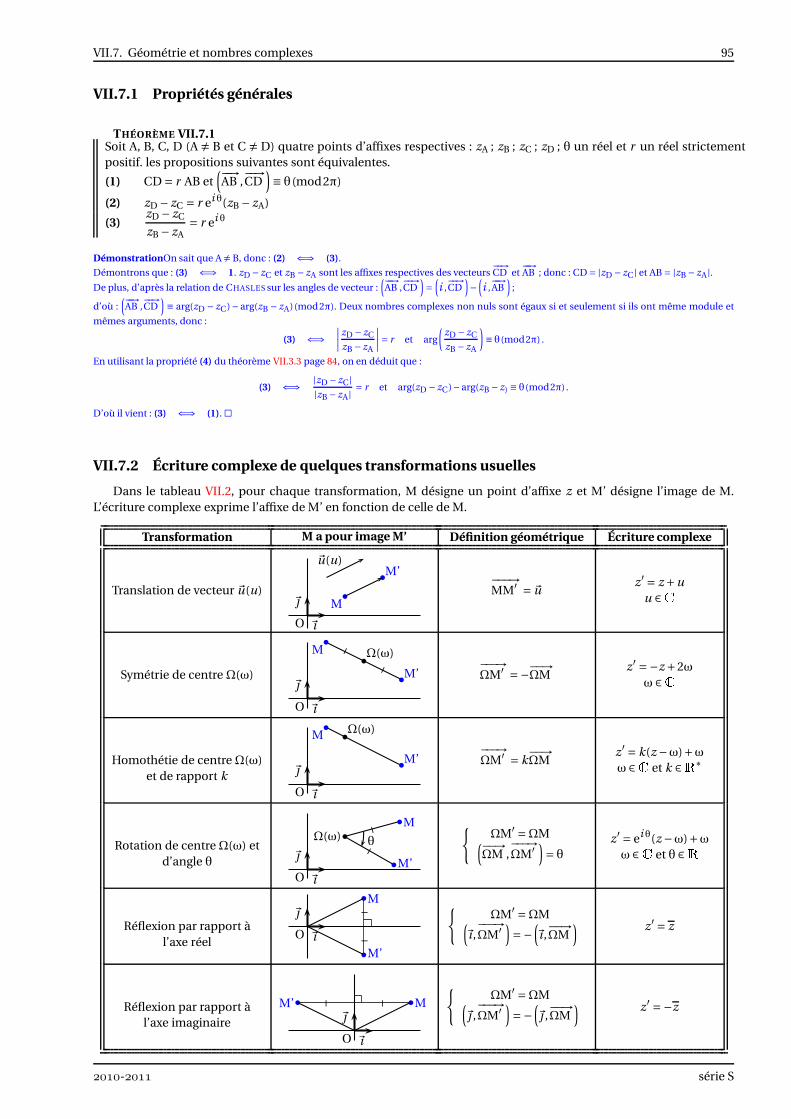
VII.7. Géométrie et nombres complexes 95
VII.7.1 Propriétés générales
THÉORÈME VII.7.1Soit A, B, C, D (A , B et C , D) quatre points d’affixes respectives : zA ; zB ; zC ; zD ; θ un réel et r un réel strictementpositif. les propositions suivantes sont équivalentes.
(1) CD = r AB et(−−→AB ,
−−→CD
)
≡ θ (mod2π)
(2) zD − zC = r ei θ(zB − zA)
(3)zD − zC
zB − zA= r ei θ
DémonstrationOn sait que A, B, donc : (2) ⇐⇒ (3).
Démontrons que : (3) ⇐⇒ 1. zD − zC et zB − zA sont les affixes respectives des vecteurs−−→CD et
−−→AB ; donc : CD = |zD − zC | et AB = |zB − zA|.
De plus, d’après la relation de CHASLES sur les angles de vecteur :(−−→AB ,
−−→CD
)
=(
i ,−−→CD
)
−(
i ,−−→AB
)
;
d’où :(−−→AB ,
−−→CD
)
≡ arg(zD − zC)−arg(zB − zA)(mod 2π). Deux nombres complexes non nuls sont égaux si et seulement si ils ont même module et
mêmes arguments, donc :
(3) ⇐⇒∣∣∣∣
zD − zC
zB − zA
∣∣∣∣= r et arg
(zD − zC
zB − zA
)
≡ θ(mod2π) .
En utilisant la propriété (4) du théorème VII.3.3 page 84, on en déduit que :
(3) ⇐⇒|zD − zC ||zB − zA|
= r et arg(zD − zC)−arg(zB − z) ≡ θ(mod2π) .
D’où il vient : (3) ⇐⇒ (1). ä
VII.7.2 Écriture complexe de quelques transformations usuelles
Dans le tableau VII.2, pour chaque transformation, M désigne un point d’affixe z et M’ désigne l’image de M.L’écriture complexe exprime l’affixe de M’ en fonction de celle de M.
Transformation M a pour image M’ Définition géométrique Écriture complexe
Translation de vecteur ~u(u)
~ı
~
O
~u(u)
b
b
M
M’ −−−→MM′ =~u
z ′ = z +u
u ∈CSymétrie de centre Ω(ω)
~ı
~
O
Ω(ω)b
|
|
b
b
M
M’−−−→ΩM′ =−−−→ΩM
z ′ =−z +2ωω ∈C
Homothétie de centre Ω(ω)et de rapport k
~ı
~
O
Ω(ω)bb
b
M
M’−−−→ΩM′ = k
−−→ΩM
z ′ = k(z −ω)+ω
ω ∈C et k ∈R∗
Rotation de centre Ω(ω) etd’angle θ
~ı
~
O
Ω(ω) b
b
b
M|
M’|θ
ΩM′ =ΩM
(−−→ΩM ,
−−−→ΩM′
)
= θ
z ′ = ei θ(z −ω)+ω
ω ∈C et θ ∈RRéflexion par rapport à
l’axe réel ~ı
~
O
b
b
M
||
M’
ΩM′ =ΩM
(
~ı,−−−→ΩM′
)
=−(
~ı,−−→ΩM
) z ′ = z
Réflexion par rapport àl’axe imaginaire
~ı
~
O
bb M||M’
ΩM′ =ΩM
(
~ ,−−−→ΩM′
)
=−(
~ ,−−→ΩM
) z ′ =−z
- série S
96 VII. Nombres complexes
TABLE VII.2 – Écriture complexe de quelques transformations
VII.7.3 Affixe du barycentre d’un système de points pondérés
On déduit de la définition du barycentre et des propriétés des affixes de vecteurs le théorème suivant.THÉORÈME VII.7.2
Soit A1, A1, . . ., An , n points d’affixes respectives zA1 , zA2 , . . .,zAn et α1, α2, . . ., αn , n nombres réels dont la somme n’estpas nulle.L’affixe, zG, du barycentre G du système de points pondérés (A1,α1) , (A2,α2) , . . . , (An ,αn) est :
zG =
n∑
k=1αk zAk
n∑
k=1αk
Exemples
1. L’affixe du milieu de [AB] est :zA + zB
2;
2. L’affixe du centre de gravité du triangle ABC est :zA + zB + zC
3.
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre VIII
Intégration
VIII.1 Primitives d’une fonction
VIII.1.1 Introduction
Les intervalles considérés dans cette partie ne sont jamais réduits à un réel.
DÉFINITION VIII.1.1Soit f une fonction et I un intervalle sur lequel f est définie.Les primitives de f sur I (s’il en existe) sont les fonctions F définies et dérivables sur I vérifiant pour tout x ∈ I :
F′(x) = f (x).
Exemples
1. Considérons la fonction f : x 7→ x2. Les fonctions x 7→x3
3et x 7→
x3
3+7 sont deux primitives de f surR.
2. La fonction ln est une primitive sur ]0,+∞[ de la fonction x 7→1
x.
Nous admettons le théorème suivant.THÉORÈME VIII.1.1
Toute fonction continue sur un intervalle I admet des primitives sur I.
On sait que la dérivée d’une fonction constante définie sur un intervalle est la fonction nulle définie sur cet intervalle.On sait également que si une fonction définie sur un intervalle a une dérivée nulle alors cette fonction est constante.On en déduit le lemme suivant.
LEMME VIII.1.2Soit I un intervalle.Les primitives sur I de la fonction nulle sont les fonctions constantes définies sur I.
THÉORÈME VIII.1.3Soit f une fonction continue sur un intervalle I et F une primitive de f sur I.Les primitives de f sur I sont les fonctions x 7→ F(x)+k où k est une constante réelle.
Démonstration Soit k ∈R et G la fonction définie par : G(x) = F(x)+k. G est la somme de deux fonction dérivables sur I, elle donc dérivable sur Iet pour tout x ∈ I, on a : G′(x) = F′(x)+0 = f (x) ; donc G est une primitive de f sur I.
Réciproquement, soir G une primitive de f sur I, démontrons qu’elle ne diffèrent de F que d’une constante.Pour tout x ∈ I, on a : (G−F)′(x) = G′(x)−F′(x) = f (x)− f (x) = 0 ; donc G−F est une primitive sur I de la fonction nulle, on en déduit que G−F estune fonction constante x 7→ k définie sur I ; d’où : G = F+k. ä
Exemple Les primitives surR de x 7→ x2 sont les fonctions de la forme x 7→x3
3+k (avec k ∈R).
Remarque On déduit du théorème VIII.1.3 que deux primitives d’une fonction sur un intervalle diffèrent d’une constante.
THÉORÈME VIII.1.4Soit f un fonction continue sur un intervalle I, a ∈ I et b ∈R.Il existe une unique primitive de f sur I prenant la valeur b en a.
Démonstration
Existence Soit G une primitive de f sur I et F la fonction définie par : F(x) =G(x)−G(a)+b.F est une primitive de f sur I et F(a) = G(a)−G(a)+b = b.
97

98 VIII. Intégration
Unicité Soit H une primitive de f sur I prenant la valeur b en a, démontrons que H = F.Les fonctions F et H ont le même ensemble de définition : I. De plus ce sont deux primitives sur I de f , elle ne diffèrent donc que d’uneconstante, k. On a : k = H(a)−F(a) = b−b = 0 ; donc : H = F.
ä
Exemple L’unique primitive de x 7→1
xsur ]0,+∞[ prenant la valeur 7 en 10 est la fonction x 7→ ln(x)− ln(10)+7.
VIII.1.2 Détermination pratique
En pratique pour déterminer une primitive d’une fonction sur un intervalle, on utilise les tableaux suivants quisont essentiellement déduits des tableaux du paragraphe VI.1.3.
fonction primitive Intervalle
x 7→ k (k ∈R) x 7→ kx Rx 7→ x x 7→
x2
2R
x 7→ xn avec n ∈Z\ −1 x 7→xn+1
n+1]−∞,0[ ou ]0,+∞[ si n <−1R si n > 0
x 7→p
x x 7→2
3x
32 ]0;+∞[
x 7→ sin x x 7→−cos x Rx 7→ cos x x 7→ sin x R
x 7→ 1+ tan2 x ou x 7→1
cos2 xx 7→ tan x
]
−π
2+kπ,
π
2+kπ
[
(avec k ∈Z)
x 7→ ex x 7→ ex Rx 7→
1
xx 7→ ln |x| ]−∞,0[ ou ]0,+∞[
TABLE VIII.1 – Primitives des fonctions élémentaires
fonction primitive remarqueu+ v U+V
ku kU
u′×un avec n ∈Z\ −1un+1
n+1si n <−1 alors u , 0 sur I
u′p
u2p
u u > 0 sur I
u′
uln |u| u , 0 sur I
u′ eu eu
x 7→ u(ax +b) x 7→1
aU(ax +b)
v ′× (u′ v) u v
TABLE VIII.2 – Primitives et opérations sur les fonctions
Exercice VIII.1.1. Déterminer une primitive surR⋆ de x 7→ 2x3 +3x2 +5
x3.
Solution La fonction x 7→ 2x3 +3x2 a pour primitive sur R la fonction x 7→1
2x4 + x3 et la fonction x 7→ x−3 a pour
primitive surR⋆ la fonction x 7→−2x−2.
Une primitive surR⋆ de x 7→ 2x3 +3x2 +5
x3est donc x 7→
1
2x4 + x3 −
5
2x2.
Exercice VIII.1.2. Déterminer une primitive surR de x 7→ cos(2πx)+5e3x .
Solution Une primitive de cos est sin, x 7→ cos(2πx) est de la forme x 7→ cos(ax + b) avec a = 2π et b = 0 ; donc
x 7→1
2πsin(2πx) est une primitive surR de x 7→ cos(2πx). De même, x 7→
1
3e3x une primitive surR de x 7→ e3x ; donc
une des primitives surR de x 7→ cos(2πx)+5e3x est x 7→1
2πsin(2πx)+
5
3e3x .
LYCÉE PONTUS DE TYARD Terminale VI

VIII.2. Premiers calculs 99
Exercice VIII.1.3. Déterminer une primitive surR de f : x 7→(
3x2 −2x +3)(
x3 −2x2 +3x +1)10.
Solution Considérons la fonction u : x 7→ x3 −2x2 +3x+1. On a : f = u′u10 donc la fonctionu11
11est une primitive surR de f .
Une des primitives surR de x 7→(
3x2 −4x +3)(
x3 −2x2 +3x +1)10 est x 7→
1
11
(
x3 −2x2 +3x +1)11.
Exercice VIII.1.4. Déterminer une primitive surR de f : x 7→x
x2 +1.
Solution Considérons la fonction u : x 7→ x2 +1. On a : f =1
2
u′
udonc la fonction
1
2ln |u|, c’est-à-dire
1
2ln u (car la
fonction u est positive surR), est une primitive surR de f .
Une des primitives surR de x 7→x
x2 +1est x 7→
1
2ln(x2 +1).
VIII.1.3 Exercices
VIII.1.a. Déterminer une primitive surR dex 7→ 3x5 −πx5 +
p2x3 −2x2 +3x − ln 2.
VIII.1.b. Déterminer une primitive surR de
x 7→ x e−x2.
VIII.1.c. Déterminer une primitive sur
]
−2
3,+∞
[
de
x 7→5
3x +2.
VIII.1.d. Déterminer une primitive sur
]
−∞,−2
3
[
de
x 7→5
3x +2.
VIII.1.e. Déterminer une primitive surR dex 7→ 100cos(2x +3).
VIII.1.f. Déterminer une primitive surR dex 7→ 50sin(3x +2).
VIII.1.g. Déterminer une primitive surR de
x 7→ 5x2 +3x −1+5
x−
13
x2+
7
x4.
VIII.1.h. Déterminer une primitive surR de
x 7→5x7 −2x4 +8x3 −5x2 +6x −1
x4.
VIII.1.i. Déterminer une primitive sur]
−π
2,π
2
[
de tan.
VIII.1.j. Déterminer une primitive surR dex 7→ sin x · cos x.
VIII.1.k. Déterminer une primitive sur]
−π
2,π
2
[
de
x 7→ tan x + tan3 x.
VIII.2 Premiers calculs
VIII.2.1 Introduction
Dans tous ce chapitre le plan est muni d’un repère orthogonal (O;~ı ,~ ).
L’unité d’aire est l’aire du rectangle d’inéquations :
0 É x É 10 É y É 1
.~ı
~
O
FIGURE VIII.1 –On se propose d’aborder une théorie qui nous permette de calculerpour une fonction positive, f , définie sur un intervalle [a,b] l’aire dé-limitée par la courbe de f , l’axe des abscisses et les droites d’équa-
tions x = a et x = b. Cette aire sera notée :∫b
af (x) d x.
∫b
af (x) d x se lit « intégrale de a à b de f de x dé x » ou « somme de a à
b de f de x dé x ».
Nous verrons que,∫b
af (x) d x, a un sens même si a > b ou si la fonc-
tion f n’est pas positive sur entre a et b.
~ı
~
O
∫b
af (x) d x
a b
FIGURE VIII.2 –
À travers l’histoire les calculs d’aires ont longtemps occupés les hommes de sciences. LEIBNIZ 1 et NEWTON ontconstruits, de façons indépendantes et presque simultanées, une théorie de détermination d’aires et de volumes parle calcul intégral.
La construction rigoureuse du calcul intégral dans le cas des fonctions continues fut établie dans la premièremoitié du XIXe siècle par CAUCHY 2.
1. LEIBNIZ Gottfried Wilhelm savant Allemand -.2. CAUCHY Louis Augustin mathématicien Français -.
- série S
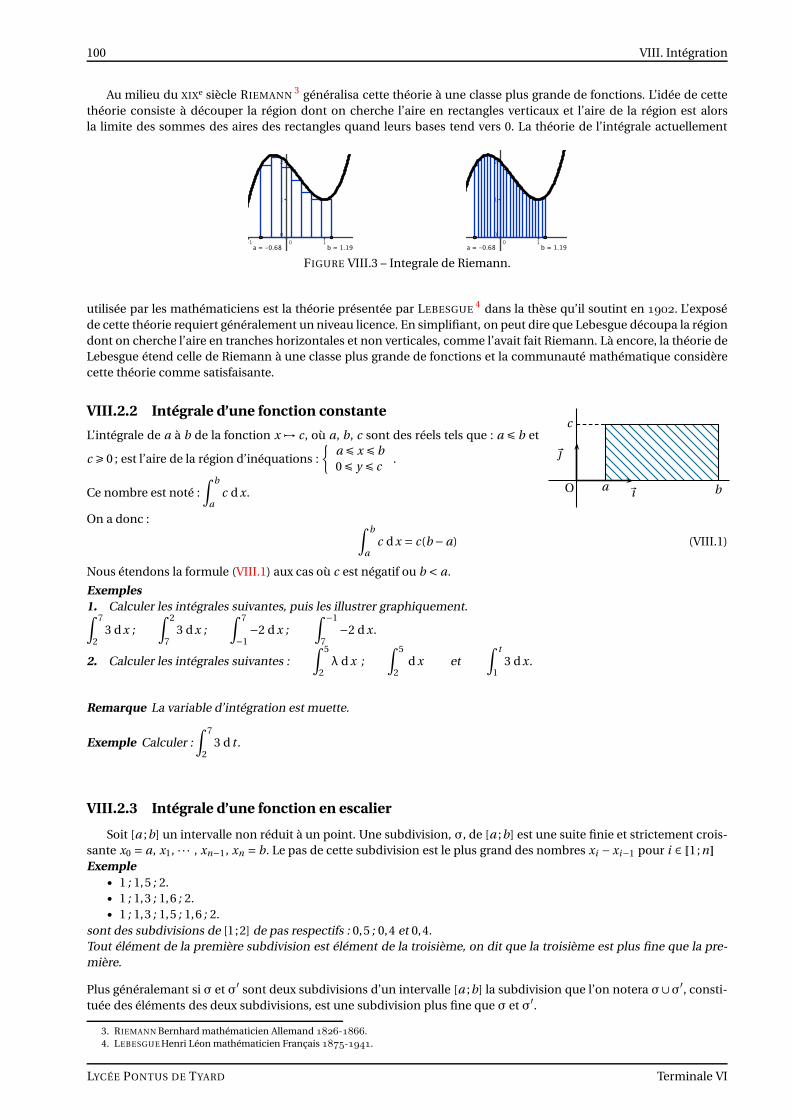
100 VIII. Intégration
Au milieu du XIXe siècle RIEMANN 3 généralisa cette théorie à une classe plus grande de fonctions. L’idée de cettethéorie consiste à découper la région dont on cherche l’aire en rectangles verticaux et l’aire de la région est alorsla limite des sommes des aires des rectangles quand leurs bases tend vers 0. La théorie de l’intégrale actuellement
FIGURE VIII.3 – Integrale de Riemann.
utilisée par les mathématiciens est la théorie présentée par LEBESGUE 4 dans la thèse qu’il soutint en . L’exposéde cette théorie requiert généralement un niveau licence. En simplifiant, on peut dire que Lebesgue découpa la régiondont on cherche l’aire en tranches horizontales et non verticales, comme l’avait fait Riemann. Là encore, la théorie deLebesgue étend celle de Riemann à une classe plus grande de fonctions et la communauté mathématique considèrecette théorie comme satisfaisante.
VIII.2.2 Intégrale d’une fonction constante
L’intégrale de a à b de la fonction x 7→ c, où a, b, c sont des réels tels que : a É b et
c Ê 0 ; est l’aire de la région d’inéquations :
a É x É b
0 É y É c.
Ce nombre est noté :∫b
ac d x. ~ı
~
O a b
c
On a donc :∫b
ac d x = c(b −a) (VIII.1)
Nous étendons la formule (VIII.1) aux cas où c est négatif ou b < a.
Exemples1. Calculer les intégrales suivantes, puis les illustrer graphiquement.∫7
23 d x ;
∫2
73 d x ;
∫7
−1−2 d x ;
∫−1
7−2 d x.
2. Calculer les intégrales suivantes :∫5
2λ d x ;
∫5
2d x et
∫t
13 d x.
Remarque La variable d’intégration est muette.
Exemple Calculer :∫7
23 d t .
VIII.2.3 Intégrale d’une fonction en escalier
Soit [a ;b] un intervalle non réduit à un point. Une subdivision, σ, de [a ;b] est une suite finie et strictement crois-sante x0 = a, x1, · · · , xn−1, xn = b. Le pas de cette subdivision est le plus grand des nombres xi − xi−1 pour i ∈ 1;nExemple
• 1 ; 1,5 ; 2.• 1 ; 1,3 ; 1,6 ; 2.• 1 ; 1,3 ; 1,5 ; 1,6 ; 2.
sont des subdivisions de [1;2] de pas respectifs : 0,5 ; 0,4 et 0,4.Tout élément de la première subdivision est élément de la troisième, on dit que la troisième est plus fine que la pre-mière.
Plus généralemant si σ et σ′ sont deux subdivisions d’un intervalle [a ;b] la subdivision que l’on notera σ∪σ′, consti-tuée des éléments des deux subdivisions, est une subdivision plus fine que σ et σ′.
3. RIEMANN Bernhard mathématicien Allemand -.4. LEBESGUE Henri Léon mathématicien Français -.
LYCÉE PONTUS DE TYARD Terminale VI
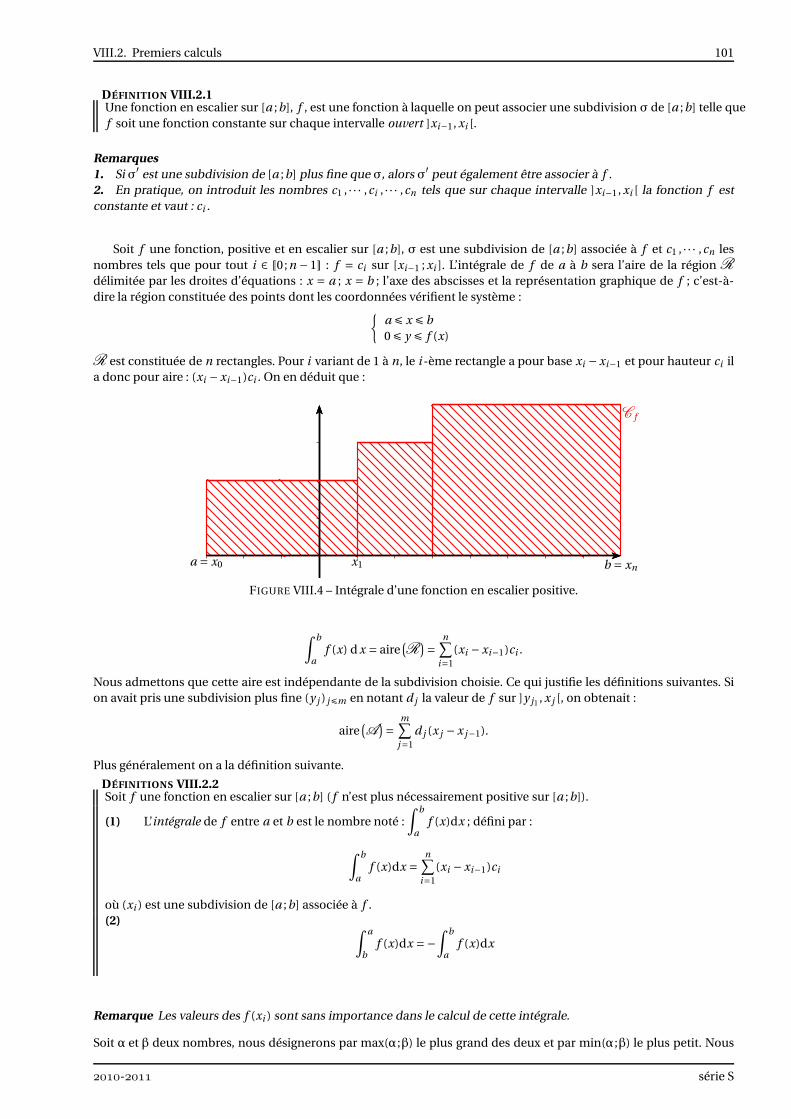
VIII.2. Premiers calculs 101
DÉFINITION VIII.2.1Une fonction en escalier sur [a ;b], f , est une fonction à laquelle on peut associer une subdivision σ de [a ;b] telle quef soit une fonction constante sur chaque intervalle ouvert ]xi−1, xi [.
Remarques1. Si σ′ est une subdivision de [a ;b] plus fine que σ, alors σ′ peut également être associer à f .2. En pratique, on introduit les nombres c1 , · · · ,ci , · · · ,cn tels que sur chaque intervalle ]xi−1 , xi [ la fonction f estconstante et vaut : ci .
Soit f une fonction, positive et en escalier sur [a ;b], σ est une subdivision de [a ;b] associée à f et c1 , · · · ,cn lesnombres tels que pour tout i ∈ 0;n − 1 : f = ci sur [xi−1 ; xi ]. L’intégrale de f de a à b sera l’aire de la région R
délimitée par les droites d’équations : x = a ; x = b ; l’axe des abscisses et la représentation graphique de f ; c’est-à-dire la région constituée des points dont les coordonnées vérifient le système :
a É x É b
0 É y É f (x)
R est constituée de n rectangles. Pour i variant de 1 à n, le i -ème rectangle a pour base xi − xi−1 et pour hauteur ci ila donc pour aire : (xi − xi−1)ci . On en déduit que :
C f
a = x0 x1 b = xn
FIGURE VIII.4 – Intégrale d’une fonction en escalier positive.
∫b
af (x) d x = aire
(
R)
=n∑
i=1(xi − xi−1)ci .
Nous admettons que cette aire est indépendante de la subdivision choisie. Ce qui justifie les définitions suivantes. Sion avait pris une subdivision plus fine (y j ) jÉm en notant d j la valeur de f sur ]y j1 , x j [, on obtenait :
aire(
A)
=m∑
j=1d j (x j − x j−1).
Plus généralement on a la définition suivante.
DÉFINITIONS VIII.2.2Soit f une fonction en escalier sur [a ;b] ( f n’est plus nécessairement positive sur [a ;b]).
(1) L’intégrale de f entre a et b est le nombre noté :∫b
af (x)dx ; défini par :
∫b
af (x)dx =
n∑
i=1(xi − xi−1)ci
où (xi ) est une subdivision de [a ;b] associée à f .(2)
∫a
bf (x)dx =−
∫b
af (x)dx
Remarque Les valeurs des f (xi ) sont sans importance dans le calcul de cette intégrale.
Soit α et β deux nombres, nous désignerons par max(α ;β) le plus grand des deux et par min(α ;β) le plus petit. Nous
- série S
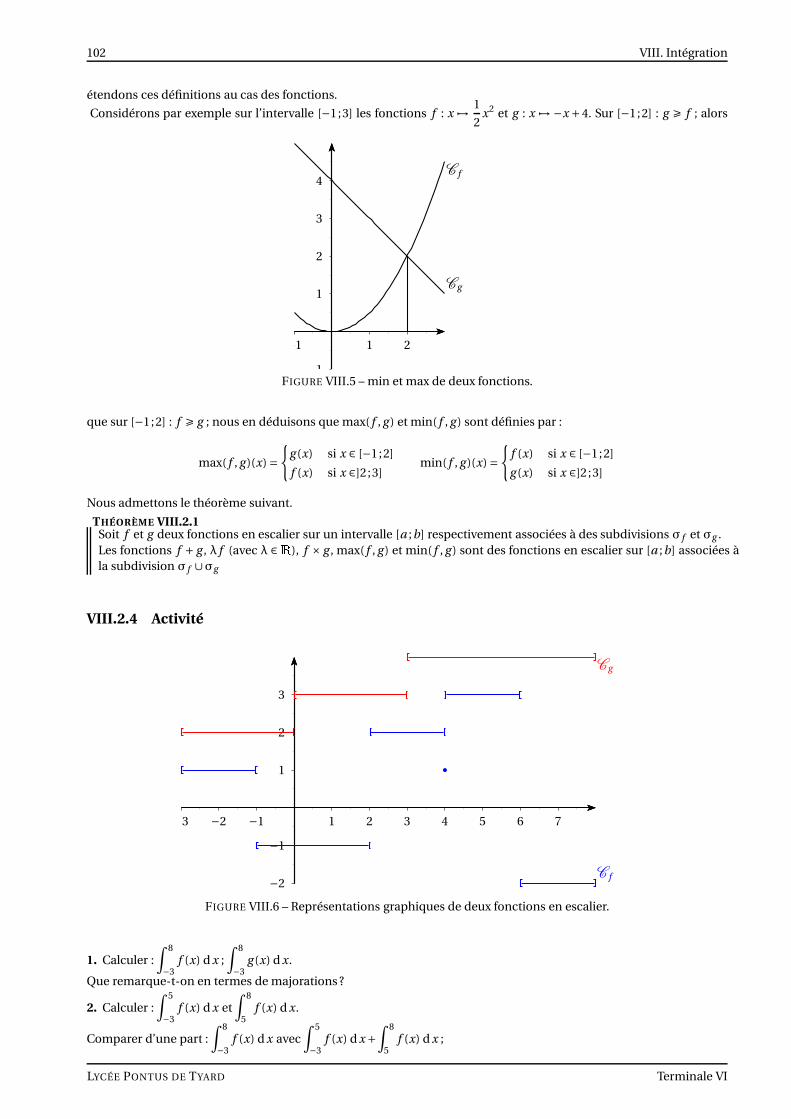
102 VIII. Intégration
étendons ces définitions au cas des fonctions.
Considérons par exemple sur l’intervalle [−1;3] les fonctions f : x 7→1
2x2 et g : x 7→ −x +4. Sur [−1;2] : g Ê f ; alors
1
2
3
4
−1
1 2−1
C f
Cg
FIGURE VIII.5 – min et max de deux fonctions.
que sur [−1;2] : f Ê g ; nous en déduisons que max( f , g ) et min( f , g ) sont définies par :
max( f , g )(x) =
g (x) si x ∈ [−1;2]
f (x) si x ∈]2;3]min( f , g )(x) =
f (x) si x ∈ [−1;2]
g (x) si x ∈]2;3]
Nous admettons le théorème suivant.
THÉORÈME VIII.2.1Soit f et g deux fonctions en escalier sur un intervalle [a ;b] respectivement associées à des subdivisions σ f et σg .Les fonctions f + g , λ f (avec λ ∈R), f × g , max( f , g ) et min( f , g ) sont des fonctions en escalier sur [a ;b] associées àla subdivision σ f ∪σg
VIII.2.4 Activité
1
2
3
−1
−2
1 2 3 4 5 6 7−1−2−3
C f
b
Cg
FIGURE VIII.6 – Représentations graphiques de deux fonctions en escalier.
1. Calculer :∫8
−3f (x) d x ;
∫8
−3g (x) d x.
Que remarque-t-on en termes de majorations ?
2. Calculer :∫5
−3f (x) d x et
∫8
5f (x) d x.
Comparer d’une part :∫8
−3f (x) d x avec
∫5
−3f (x) d x +
∫8
5f (x) d x ;
LYCÉE PONTUS DE TYARD Terminale VI
VIII.3. Intégrale de Riemann 103
d’autre part :∫5
−3f (x) d x avec
∫8
−3f (x) d x +
∫5
8f (x) d x.
3. Tracer la représentation graphique de 2 f , puis calculer :∫8
−32 f (x) d x.
Que remarque-t-on ?
4. Tracer la représentation graphique de f + g , puis calculer :∫8
−3( f + g )(x) d x.
Que remarque-t-on ?
VIII.2.5 Propriétés des intégrales de fonctions en escalier
L’activité ci-dessus suggère les théorèmes suivants que nous admettons.
THÉORÈME VIII.2.2 LINÉARITÉSoit f et g deux fonctions en escalier sur un intervalle [a ;b] et α un nombre réel.(1)
∫b
a( f + g )(x) d x =
∫b
af (x) d x +
∫b
ag (x) d x.
(2)∫b
aα f (x) d x =α
∫b
af (x) d x.
Remarques
1. Plus généralement :∫b
a(α f +βg )(x) d x =α
∫b
af (x) d x +β
∫b
ag (x) d x.
2. L’intégrale d’une combinaison linéaire de fonctions est la conbinaison linéaire des intégrales. On dit que l’inté-grales des fonctions en escalier est linéaire.
THÉORÈME VIII.2.3 COMPARAISON DES INTÉGRALESSoit f et g deux fonctions en escalier sur un intervalle [a ;b].
Si f Ê g sur [a,b] alors :∫b
af (x) d x Ê
∫b
ag (x) d x.
Remarque Le théorème n’est pas établi dans le cas d’une inégalité stricte.
THÉORÈME VIII.2.4 RELATION DE CHASLESSoit f une fonction en escalier sur un intervalle I et a, b et c trois éléments de I.
∫b
af (x) d x +
∫c
bf (x) d x =
∫c
af (x) d x.
VIII.3 Intégrale de Riemann
VIII.3.1 Définition
Nous allons maintenant définir l’intégrale d’une fonction quelconque comme une limite comune d’intégrales defonctions en escalier.
DÉFINITION VIII.3.1Soit f une fonction définie sur un intervalle [a ;b].Nous dirons que f est intégrable au sens de Riemann sur [a ;b] s’il existe deux suites
(
fn
)
n∈N et(
gn
)
n∈N de fonctionsen escalier vérifiant les propriétés suivantes :
(1) Pour tout entier naturel n, on a sur [a ;b] : fn É f É gn .
(2) Les suites (In) et (Jn) définies par : In =∫b
afn (x) d x et Jn =
∫b
agn(x) d x ; sont adjacentes.
La limite commune de ces deux suites est :∫b
af (x) d x.
- série S
104 VIII. Intégration
Pour justifier cette définition, nous devons établir que la limite commune des suites (In) et (Jn) est indépendantes dessuites
(
fn
)
et(
gn
)
.Soit deux suites (kn)n∈N et (ln )n∈N de fonctions en escalier vérifiant :
– Pour tout entier naturel n, on a sur [a ;b] : kn É f É ln .
– Les suites (Kn) et (Ln) définies par : Kn =∫b
akn(x) d x et Ln =
∫b
aln (x) d x ; sont adjacentes.
Désignons par ℓ leur limite commune.
Nous devons démontrer que : ℓ=∫b
af (x) d x.
On a, sur [a ;b], pour tout entier naturel n : fn É f É ln ;donc par comparaison des intégrales, pour tout entier naturel n : In É Ln .
Par comparaisons des limites (théorème III.7.7), nous en déduisons que :∫b
af (x) d x É ℓ.
En comparant kn et gn on démontre de même que : ℓÉ∫b
af (x) d x. Donc : ℓ=
∫b
af (x) d x.
Il serait maintenant intéressant connaître quelques fonctions intégrables au sens de Riemann. Nous admettons lethéorème suivant.
THÉORÈME VIII.3.1Les fonctions continues sur un intervalle [a,b] ou monotones sur [a,b] sont intégrables au sens de Riemann sur [a,b].
VIII.3.2 Sommes de Riemann
VIII.3.2.a Introduction
Pour démontrer le théorème VIII.3.1, il faut considérer une fonction continue sur un intervalle [a,b] puis construireles suites adjacentes (In) et (Jn). Pour construire ces suite qui convergent vers l’intégrale de f et donc sont des approxi-
mations de∫b
af (x) d x ; on utilise les sommes de Riemann.
Soit f une fonction définie entre autre sur [a ;b], (xi )i∈0,n est une subdivision de [a ;b] et ξ1 , · · · ,ξn des nombrestels que pour tout i ∈ 1;n : ξi ∈ [xi−1 ; xi ]. La somme de Riemman de f sur [a,b] associée à (xi ) et à (ξi ) est l’intégralede la fonction en escalier, fe , définie par :
∀i ∈ 1,n , ci = f (ξi )
On a alors :∫b
afe (x) d x =
n∑
i=1(xi − xi−1) f (ξi ).
On devine que cette dernière intégrale sera une appriximation de∫b
af (x) d x d’autant meilleure que la subdivision
associée sera fine et que les ξi auront été choisis judicieusement.En pratique on choisit le nombre, n, d’intervalles de la subdivision, puis on prend la subdivision à pas constant :
h =b −a
n. La subdivision, σn , est alors définie par : xk = a +k
b −a
n= a +kh.
Nous admettons le théorème suivant.
THÉORÈME VIII.3.2Soit f une fonction continue ou montone sur [a b] et (In) une suite de sommes de Riemann de f sur [a,b], associéesà σn .
La suite (In) est convergente et sa limite est :∫b
af (x) d x.
Remarque Ce théorème peut servir à démontrer le théorème VIII.3.1
Nous allons maintenant examiner des exemples communs de sommes de Riemann. Le premier a un intérêt théorique,les suivants permettent de calculer des valeurs approchées d’une intégrale. Nous supposerons dans tous ces exemplesque la fonction f est continue sur [a,b] et nous calculerons une somme de Riemann de f sur [a,b] associée à σn . Nousaurons ainsi :
∫b
afe (x) d x =
b −a
n
n∑
i=1f (ξi ) = h
n∑
i=1f (ξi ).
LYCÉE PONTUS DE TYARD Terminale VI
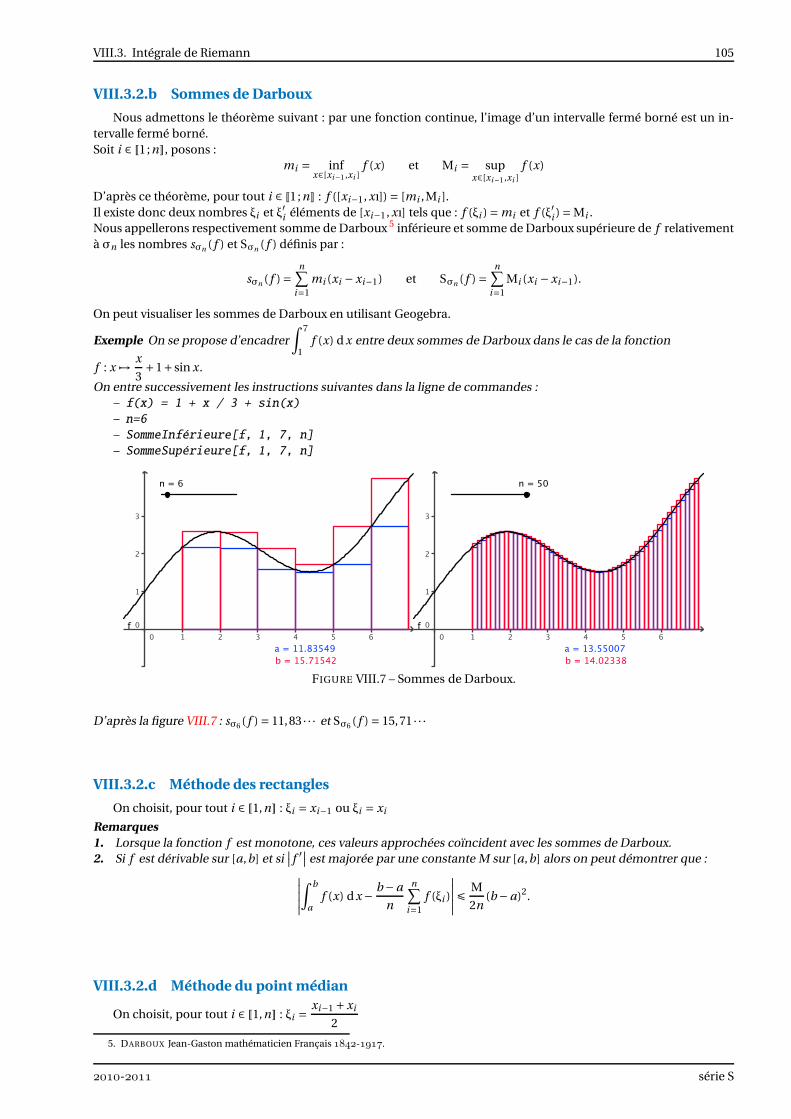
VIII.3. Intégrale de Riemann 105
VIII.3.2.b Sommes de Darboux
Nous admettons le théorème suivant : par une fonction continue, l’image d’un intervalle fermé borné est un in-tervalle fermé borné.Soit i ∈ 1;n, posons :
mi = infx∈[xi−1 ,xi ]
f (x) et Mi = supx∈[xi−1 ,xi ]
f (x)
D’après ce théorème, pour tout i ∈ 1;n : f ([xi−1, xı]) = [mi ,Mi ].Il existe donc deux nombres ξi et ξ′i éléments de [xi−1 , xı] tels que : f (ξi ) = mi et f (ξ′i ) = Mi .Nous appellerons respectivement somme de Darboux 5 inférieure et somme de Darboux supérieure de f relativementà σn les nombres sσn ( f ) et Sσn ( f ) définis par :
sσn ( f )=n∑
i=1mi (xi − xi−1) et Sσn ( f ) =
n∑
i=1Mi (xi − xi−1).
On peut visualiser les sommes de Darboux en utilisant Geogebra.
Exemple On se propose d’encadrer∫7
1f (x) d x entre deux sommes de Darboux dans le cas de la fonction
f : x 7→x
3+1+ sin x.
On entre successivement les instructions suivantes dans la ligne de commandes :– f(x) = 1 + x / 3 + sin(x)– n=6– SommeInférieure[f, 1, 7, n]– SommeSupérieure[f, 1, 7, n]
FIGURE VIII.7 – Sommes de Darboux.
D’après la figure VIII.7 : sσ6 ( f ) = 11,83 · · · et Sσ6 ( f ) = 15,71 · · ·
VIII.3.2.c Méthode des rectangles
On choisit, pour tout i ∈ 1,n : ξi = xi−1 ou ξi = xi
Remarques1. Lorsque la fonction f est monotone, ces valeurs approchées coïncident avec les sommes de Darboux.2. Si f est dérivable sur [a,b] et si
∣∣ f ′∣∣ est majorée par une constante M sur [a,b] alors on peut démontrer que :
∣∣∣∣∣
∫b
af (x) d x −
b −a
n
n∑
i=1f (ξi )
∣∣∣∣∣É
M
2n(b −a)2.
VIII.3.2.d Méthode du point médian
On choisit, pour tout i ∈ 1,n : ξi =xi−1 + xi
2
5. DARBOUX Jean-Gaston mathématicien Français -.
- série S
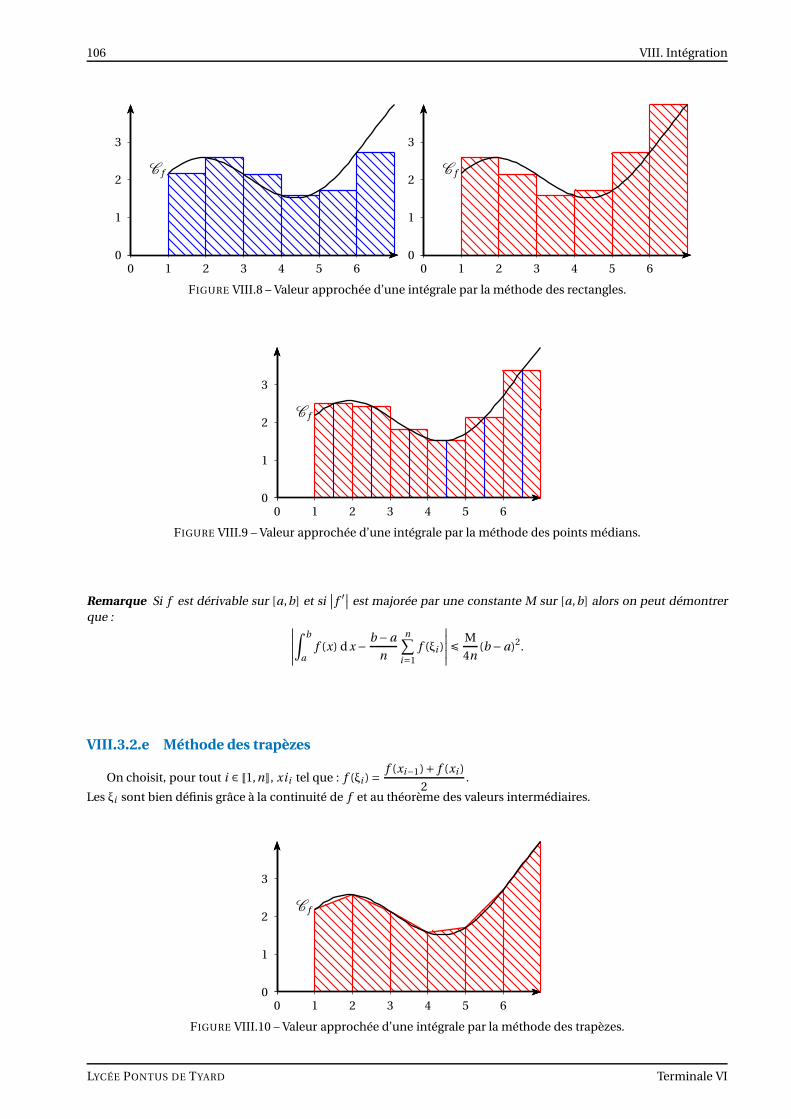
106 VIII. Intégration
0
1
2
3
0 1 2 3 4 5 6
C f
0
1
2
3
0 1 2 3 4 5 6
C f
FIGURE VIII.8 – Valeur approchée d’une intégrale par la méthode des rectangles.
0
1
2
3
0 1 2 3 4 5 6
C f
FIGURE VIII.9 – Valeur approchée d’une intégrale par la méthode des points médians.
Remarque Si f est dérivable sur [a,b] et si∣∣ f ′∣∣ est majorée par une constante M sur [a,b] alors on peut démontrer
que :∣∣∣∣∣
∫b
af (x) d x −
b −a
n
n∑
i=1f (ξi )
∣∣∣∣∣É
M
4n(b −a)2.
VIII.3.2.e Méthode des trapèzes
On choisit, pour tout i ∈ 1,n, xii tel que : f (ξi ) =f (xi−1)+ f (xi )
2.
Les ξi sont bien définis grâce à la continuité de f et au théorème des valeurs intermédiaires.
0
1
2
3
0 1 2 3 4 5 6
C f
FIGURE VIII.10 – Valeur approchée d’une intégrale par la méthode des trapèzes.
LYCÉE PONTUS DE TYARD Terminale VI

VIII.3. Intégrale de Riemann 107
Remarque Si f est deux fois dérivable sur [a,b] et si∣∣ f ′′∣∣ est majorée par une constante M sur [a,b] alors on peut
démontrer que :∣∣∣∣∣
∫b
af (x) d x −
b −a
n
n∑
i=1f (ξi )
∣∣∣∣∣É
M
12n2(b −a)3.
VIII.3.3 Exemple d’intégrale d’une fonction usuelle
On rappelle que la partie entière d’un nombre réel, x, est le plus grand entier relatif inférieur ou égal à x. La partieentière de x sera ici notée ⌊x⌋. Pour tout nombre réel, x, ⌊x⌋ est l’entier vérifiant :
⌊x⌋ É x < ⌊x⌋+1.
On définit de même la fonction plafond par :
⌈x⌉ =−⌊−x⌋
⌈x⌉ est donc le plus petit entier relatif supérieur ou égal à x. Pour tout nombre réel, x, ⌈x⌉ est l’entier vérifiant :
⌈x⌉−1 < x É ⌈x⌉.
Pour tout n ∈N, on a donc : n = ⌊x⌋ = ⌈x⌉. Ces fonctions permettent d’encadrer n’importe quel réel entre deux entiersconsécutifs (ou égaux si le réel considéré est un entier) :
∀x ∈R, ⌊x⌋ É x É ⌈x⌉.
On rapelle que pour tout entier naturel n :
n∑
k=0k2 =
n(n+1)(2n+1)
6.
Dans cette activité, f désigne la fonction x 7→ x2 (on rappelle que f est strictement croissante surR+⋆) et α désigne unnombre réel strictement positif. On se propose de démontrer que la fonction f est intégrable sur [0;α] et d’exprimer∫b
af (x) d x en fonction α.
Pour tout entier naturel non nul n, on définit sur [0;α] les fonctions fn et gn par :
fn (x) = f(α
n
⌊ nx
α
⌋)
gn(x) = f(α
n
⌈nx
α
⌉)
1. Dans cette question, α= 3 et n = 6.
a. Représenter sur un même graphique les fonctions : f , f6 et g6.
b. Déterminer I6 et J6.
2. Dans cette question n désigne un entier naturel non nul fixé.
a. On veut subdiviser l’intervalle [0;α] en n intervalles de même amplitude.Donner les éléments et le pas de la subdivision.
b. Démontrer que pour tout élément k de 0;n : fn
(
kα
n
)
= gn
(
kα
n
)
= f(
kα
n
)
.
c. Démontrer que pour tout élément k de 1;n, les fonctions fn et gn sont constantes sur l’intervalle]
(k −1)α
n;k
α
n
[
.
En déduire que fn et gn sont des fonctions en escalier associées à une subdivision qu’il conviendra de préciser.
d. Déduire de l’étude menée en 2.c que :
In =α3
6×
(n−1)(2n−1)
n2et Jn =
α3
6×
(n+1)(2n+1)
n2.
3. a. Après avoit préciser le signe des suites (In) et (Jn), étudier leur monotonie (on pourra calculer le quotient de deux
termes consécutifs).
b. Démontrer que les suites (In) et (Jn) sont adjacentes.
4. Déterminer la limite commune des suites (In) et (Jn). Puis dériver cette limite par rapport à α.
- série S
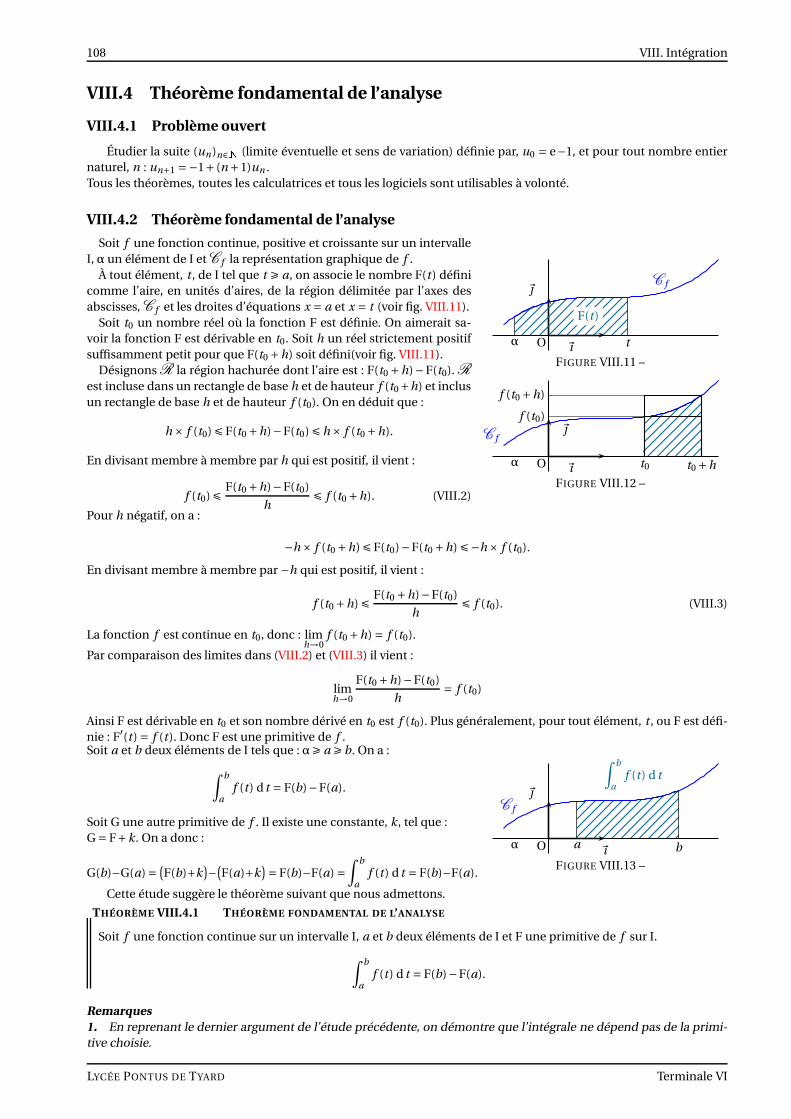
108 VIII. Intégration
VIII.4 Théorème fondamental de l’analyse
VIII.4.1 Problème ouvert
Étudier la suite (un )n∈N (limite éventuelle et sens de variation) définie par, u0 = e−1, et pour tout nombre entiernaturel, n : un+1 =−1+ (n+1)un .Tous les théorèmes, toutes les calculatrices et tous les logiciels sont utilisables à volonté.
VIII.4.2 Théorème fondamental de l’analyse
Soit f une fonction continue, positive et croissante sur un intervalleI, α un élément de I et C f la représentation graphique de f .
À tout élément, t , de I tel que t Ê a, on associe le nombre F(t) définicomme l’aire, en unités d’aires, de la région délimitée par l’axes desabscisses, C f et les droites d’équations x = a et x = t (voir fig. VIII.11).
Soit t0 un nombre réel où la fonction F est définie. On aimerait sa-voir la fonction F est dérivable en t0. Soit h un réel strictement positifsuffisamment petit pour que F(t0 +h) soit défini(voir fig. VIII.11).
Désignons R la région hachurée dont l’aire est : F(t0 +h)−F(t0). Rest incluse dans un rectangle de base h et de hauteur f (t0+h) et inclusun rectangle de base h et de hauteur f (t0). On en déduit que :
h× f (t0) É F(t0 +h)−F(t0) É h× f (t0 +h).
En divisant membre à membre par h qui est positif, il vient :
f (t0)ÉF(t0 +h)−F(t0)
hÉ f (t0 +h). (VIII.2)
~ı
~
O
F(t)
α t
C f
FIGURE VIII.11 –
~ı
~
Oα t0 t0 +h
C f
f (t0)
f (t0 +h)
FIGURE VIII.12 –
Pour h négatif, on a :
−h× f (t0 +h) É F(t0)−F(t0 +h) É−h× f (t0).
En divisant membre à membre par −h qui est positif, il vient :
f (t0 +h) ÉF(t0 +h)−F(t0)
hÉ f (t0). (VIII.3)
La fonction f est continue en t0, donc : limh→0
f (t0 +h) = f (t0).
Par comparaison des limites dans (VIII.2) et (VIII.3) il vient :
limh→0
F(t0 +h)−F(t0)
h= f (t0)
Ainsi F est dérivable en t0 et son nombre dérivé en t0 est f (t0). Plus généralement, pour tout élément, t , ou F est défi-nie : F′(t) = f (t). Donc F est une primitive de f .Soit a et b deux éléments de I tels que : αÊ a Ê b. On a :
∫b
af (t) d t = F(b)−F(a).
Soit G une autre primitive de f . Il existe une constante, k, tel que :G = F+k. On a donc :
G(b)−G(a)=(
F(b)+k)
−(
F(a)+k)
= F(b)−F(a) =∫b
af (t) d t = F(b)−F(a).
~ı
~
O
∫b
af (t) d t
α a b
C f
FIGURE VIII.13 –
Cette étude suggère le théorème suivant que nous admettons.
THÉORÈME VIII.4.1 THÉORÈME FONDAMENTAL DE L’ANALYSE
Soit f une fonction continue sur un intervalle I, a et b deux éléments de I et F une primitive de f sur I.
∫b
af (t) d t = F(b)−F(a).
Remarques1. En reprenant le dernier argument de l’étude précédente, on démontre que l’intégrale ne dépend pas de la primi-tive choisie.
LYCÉE PONTUS DE TYARD Terminale VI

VIII.4. Théorème fondamental de l’analyse 109
2. Soit f une fonction dérivable sur un intervalle, I, dont la dérivée, f ′, est continue sur I et a et b deux éléments deI. La fonction f est une primitive sur I de la fonction f ′ continue sur cet intervalle, donc :
f (b)− f (a) =∫b
af ′(t) d t .
Notations et vocabulaire1. On écrit :
∫b
af (t) d t = [F(t)]b
a = F(b)−F(a).
2. L’expression « [F(t)]ba » se lit : « F(t) pris entre a et b »
3. a et b sont les bornes de l’intégrale.
Exemples1. La fonction sin est continue surR et a pour primitive sur cet intervalle la fonction, −cos ; donc :
∫π
0sin(t) d t = [−cos t ]π0 =
(
−cosπ)
−(
−cos0)
= 2.
2. La fonction, f : x 7→ 3x2 −6x, est continue surR et a pour primitive sur cet intervalle la fonction, F : x 7→ x3 −3x2 ;donc :
∫3
−1f (t) d t =
[
t 3 −3t 2]5−1 =
(
33 −3×3)
−(
(−1)3 −3(−1)2)= 18+4 = 22.
COROLLAIRE VIII.4.2Soit f une fonction continue sur un intervalle I, a et b deux éléments de I.
(1) On a :∫a
af (t) d t = 0.
(2) On a :∫b
af (t) d t =−
∫b
af (t) d t .
Démonstration Soit, F, une primitive de f sur I. On a :
(1)∫a
af (t ) d t = F(a)−F(a) = 0.
(2)∫a
bf (t ) d t = F(a)−F(b) =−
(
F(b)−F(a))
=−∫b
af (t ) d t . ä
COROLLAIRE VIII.4.3Soit f une fonction continue sur un intervalle I, et a un élément de I.
La fonction, x 7→∫x
af (t) d t , est la primitive de f sur I nulle en a.
Démonstration L’existence et l’unicité d’une telle primitive sont garanties par le théorème VIII.1.4.
Considérons une primitive, F, de f sur I et désignons par G la fonction : x 7→∫x
af (t ) d t .
On a : G(a) =∫a
af (t ) d t = 0. De plus, pour tout élément, x, de I, on a :
G(x) = F(x)−F(a).
En dérivant membre à membre cette identité par rapport à x, il vient : G′(x) = f (x).
Donc G est la primitive de f sur I nulle en a. ä
Exemple La fonction ln est la primitive sur ]0;+∞[ de t 7→1
tnulle en 1. Donc, pour tout nombre réel strictement
positif, x :∫x
1
d t
t= [ln t ]x
1 = ln x − ln 1 = ln x.
La fonction ln peut être définie comme l’intégrale de la fonction inverse.
Interprétation graphiqueSoit f une fonction continue et positive sur un intervalle I, a et b deux éléments de I avec : a < b.
Le nombre,∫b
af (t) d t , est la valeur de l’aire, en unité d’aire, de la région délimitée par la courbe représentative
de f , l’axe des abscisses et les droites d’équations : x = a et x = b. Voir figure VIII.13.
- série S

110 VIII. Intégration
Exercice VIII.4.1. Calculer :∫3
−1
(
5t 2 +3t +1)
d t .
Solution∫3
−1
(
5t 2 +3t +1)
d t =[
5t 3
3+3
t 2
2+ t
]3
−1= 61,5−
(
−7
6
)
=−188
3
Exercice VIII.4.2. Calculer :∫π
6
0(3cos 2t −2sin 3t ) d t .
Solution On a :∫ π
6
0(3cos 2t −2sin 3t) d t =
[
3sin 2t
2+2
cos 3t
3
] π6
0=
3
2×
p3
2−
2
3=
9p
3−8
12.
Exercice VIII.4.3. Calculer :∫π
6
0sin t
(
3cos2 t −2cos3 t)
d t .
Solution Introduisons la fonction, u : t 7→ cos t , et la fonction polynôme, P : t 7→1
2t 4 − t 3.
On a : u′(t)=−sin t et P′(t)= 2t 3 −3t 2. Donc, pour t ∈R : sin t(
3cos2 t −2cos3 t)
= u′×P′(u)(t). Ainsi :
∫ π6
0sin t
(
3cos2 t −2cos3 t)
d t =[
1
2cos4 t −cos3 t
] π6
0=
9
32−
3p
3
8−
(
−1
2
)
=25−12
p3
32.
Exercice VIII.4.4. Calculer :∫π
3
0cos5 t d t .
Solution Pour t ∈R, on a : cos5 t = cos t(
cos2 t)2 = cos t
(
1− sin2 t)2 = cos t
(
sin4 t −2sin2 t +1)
.
Introduisons les fonctions : u : t 7→ sin t et P : t 7→t 5
5−2
t 3
3+ t .
Pour tout t ∈R : u′(t) = cos t et P′(t) = t 4 −2t 2 +1.Donc, pour tout t ∈R : u′(t)×P(u(t)) = cos t
(
sin4 t −2sin2 t +1)
= cos5 t .D’où il vient :
∫ π3
0cos5 t d t = [P(u(t))]
π30 =
[sin5 t
5−
2
3sin3 t + sin t
] π3
0=
9p
3
160−
p3
4+
p3
2=
49p
3
160.
VIII.4.3 Exercices
VIII.4.a. Calculer :∫4
15x3 +4x2 +3x −5 d x.
VIII.4.b. calculer :∫5
0(2x −3) d t ;
∫x
0(2t −3) d t et
∫x
0(2x −3) d t .
VIII.4.c. calculer :∫ π
2
0(5cos 6t −3sin 9t) d t .
VIII.4.d. calculer :∫5
2
(
5e2t −2e5t)
d t .
VIII.4.e. calculer :∫3
0t
32 d t .
VIII.4.f. calculer :∫9
0
pt d t .
VIII.4.g. calculer :∫4
1
d tp
t.
VIII.4.h. calculer :∫12
4
d tp
2t +1.
VIII.4.i. calculer :∫3
0(2t +3)
p2t +3 d t .
VIII.4.j. calculer :∫3
−1
t d t
t 2 +1.
VIII.4.k. calculer :∫3
1
et d t
e2t −1.
VIII.4.l. calculer :∫ π
2
0sin t cos2 t d t .
VIII.4.m. calculer :∫ π
2
0cos3 t d t .
VIII.4.n. calculer :∫ π
2
0sin5 t d t .
VIII.5 Proptiétés algébriques
VIII.5.1 Relation de Chasles
THÉORÈME VIII.5.1 RELATION DE CHASLES
LYCÉE PONTUS DE TYARD Terminale VI

VIII.5. Proptiétés algébriques 111
Soit f une fonction continue sur un intervalle I, et a, b, c trois éléments de I.
On a :∫b
af (t) d t +
∫c
bf (t) d t =
∫c
af (t) d t .
Démonstration Soit F une primitive de f sur I. On a :∫b
af (t ) d t +
∫c
bf (t ) d t = (F(b)−F(a)) + (F(c)−F(b)) = F(c)−F(a) =
∫c
af (t ) d t .
ä
Interprétation graphique
Si f est positive sur I et si, a É b É c, désignons par D larégion délimitée par la courbe représentative de f , l’axedes abscisses et les droites d’équations : x = a et x = c.Le théorème VIII.5.1 signifie que :
aire(D) = aire(D1)+aire(D2) ~ı
~
O
D1 D2
a b c
C f
FIGURE VIII.14 –
Exercice VIII.5.1. Calculer :∫3
0|t −1| d t .
Solution Éliminons la valeur absolue. L’expression sans valeur absolue de ||t −1|| est donnée par le tableau ci-dessous.
x 1|t −1| 1− t 0 t −1
D’après la relation de Chasles, on a donc :
∫3
0|t −1| d =
∫1
0|t −1| d+
∫3
1|t −1| d =
∫1
01− t d+
∫3
1t −1 d =
[
t −t 2
2
]1
0+
[t 2
2− t
]3
1=
5
2.
VIII.5.2 Linéarité
THÉORÈME VIII.5.2 LINÉARITÉ DE L’INTÉGRALESoit f et g deux fonctions continues sur un intervalle I, et a, b deux éléments de I.(1) On a :
∫b
a
(
f (t)+ g (t))
d t =∫b
af (t) d t +
∫b
ag (t) d t .
(2) On a :∫b
aα f (t) d t =α
∫b
af (t) d t .
Démonstration Soit F et G deux primitives sur I de f et g .(1) F+G est une primitive sur I de, f +g , donc :
∫b
a
(f (t )+g (t )
)d t = (F+G)(b)− (F+G)(a) = F(b)+G(b)−F(a)−G(a) = F(b)−F(a)+G(b)−G(a) =
∫b
af (t ) d t +
∫b
ag (t ) d t .
(2) αF est une primitive sur I de, α f , donc :
∫b
aα f (t ) d t =αF(b)−αF(a) =α(F(b)−F(a)) = α
∫b
af (t ) d t .
äOn dit que l’intégrale est linéaire. Cela signifie que l’intégrale d”une combinaison linéaire de fonctions est la combi-
naison linéaire des intégrales.
Remarque En particulier :∫b
a− f (t) d t =−
∫b
af (t) d t .
Exemple
3∫7
2
(
2t 2 −1)
d t −2∫7
2
(
3t 2 +4)
d t =∫7
2
(
3(
2t 2 −1)
−2(
3t 2 +4))
d t =∫7
2−11 d t =−55.
- série S
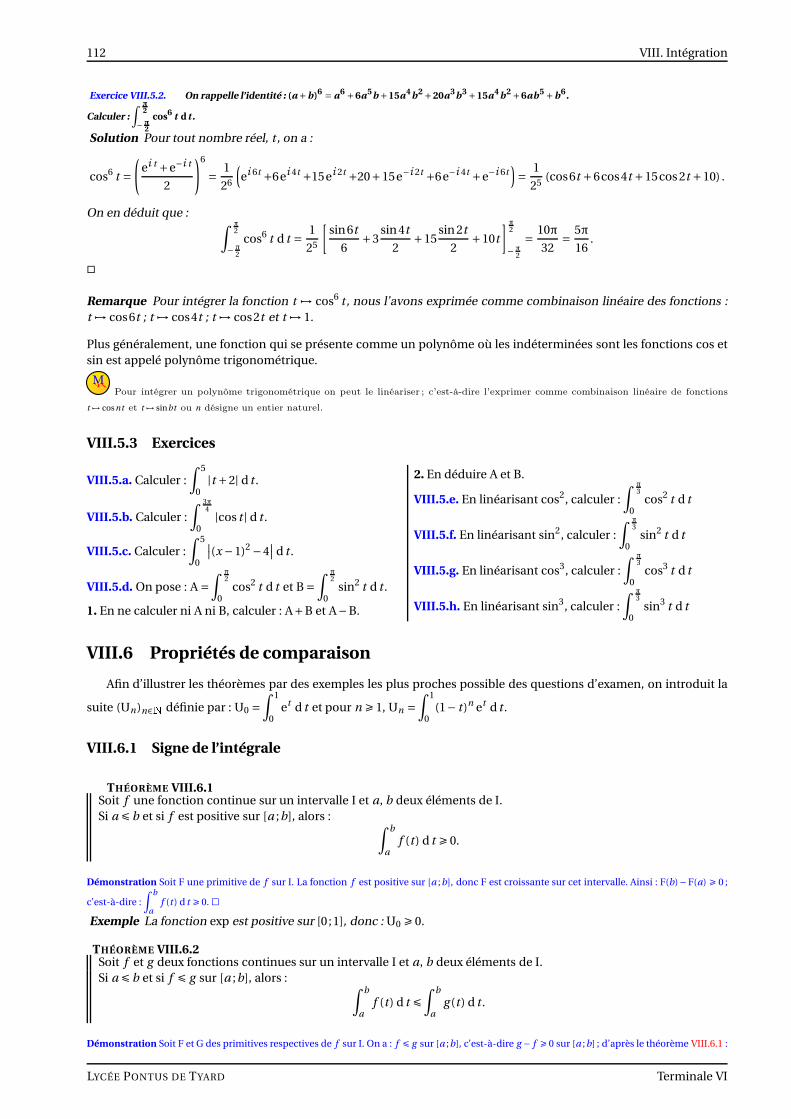
112 VIII. Intégration
Exercice VIII.5.2. On rappelle l’identité : (a +b)6 = a6 +6a5b +15a4b2 +20a3b3 +15a4b2 +6ab5 +b6.
Calculer :∫ π
2
−π2
cos6 t d t .
Solution Pour tout nombre réel, t , on a :
cos6 t =(
ei t +e−i t
2
)6
=1
26
(
ei 6t +6ei 4t +15ei 2t +20+15e−i 2t +6e−i 4t +e−i 6t)
=1
25 (cos6t +6cos 4t +15cos 2t +10) .
On en déduit que :∫ π
2
− π2
cos6 t d t =1
25
[sin 6t
6+3
sin 4t
2+15
sin 2t
2+10t
] π2
− π2
=10π
32=
5π
16.
Remarque Pour intégrer la fonction t 7→ cos6 t , nous l’avons exprimée comme combinaison linéaire des fonctions :t 7→ cos6t ; t 7→ cos4t ; t 7→ cos2t et t 7→ 1.
Plus généralement, une fonction qui se présente comme un polynôme où les indéterminées sont les fonctions cos etsin est appelé polynôme trigonométrique.
MMPour intégrer un polynôme trigonométrique on peut le linéariser ; c’est-à-dire l’exprimer comme combinaison linéaire de fonctions
t 7→ cosnt et t 7→ sinbt ou n désigne un entier naturel.
VIII.5.3 Exercices
VIII.5.a. Calculer :∫5
0|t +2| d t .
VIII.5.b. Calculer :∫ 3π
4
0|cos t | d t .
VIII.5.c. Calculer :∫5
0
∣∣(x −1)2 −4
∣∣ d t .
VIII.5.d. On pose : A =∫ π
2
0cos2 t d t et B=
∫ π2
0sin2 t d t .
1. En ne calculer ni A ni B, calculer : A+B et A−B.
2. En déduire A et B.
VIII.5.e. En linéarisant cos2, calculer :∫ π
3
0cos2 t d t
VIII.5.f. En linéarisant sin2, calculer :∫ π
3
0sin2 t d t
VIII.5.g. En linéarisant cos3, calculer :∫ π
3
0cos3 t d t
VIII.5.h. En linéarisant sin3, calculer :∫ π
3
0sin3 t d t
VIII.6 Propriétés de comparaison
Afin d’illustrer les théorèmes par des exemples les plus proches possible des questions d’examen, on introduit la
suite (Un)n∈N définie par : U0 =∫1
0et d t et pour n Ê 1, Un =
∫1
0(1− t)n et d t .
VIII.6.1 Signe de l’intégrale
THÉORÈME VIII.6.1Soit f une fonction continue sur un intervalle I et a, b deux éléments de I.Si a É b et si f est positive sur [a ;b], alors :
∫b
af (t) d t Ê 0.
Démonstration Soit F une primitive de f sur I. La fonction f est positive sur [a ;b], donc F est croissante sur cet intervalle. Ainsi : F(b)−F(a) Ê 0 ;
c’est-à-dire :∫b
af (t ) d t Ê 0. ä
Exemple La fonction exp est positive sur [0;1], donc : U0 Ê 0.
THÉORÈME VIII.6.2Soit f et g deux fonctions continues sur un intervalle I et a, b deux éléments de I.Si a É b et si f É g sur [a ;b], alors :
∫b
af (t) d t É
∫b
ag (t) d t .
Démonstration Soit F et G des primitives respectives de f sur I. On a : f É g sur [a ;b], c’est-à-dire g − f Ê 0 sur [a ;b] ; d’après le théorème VIII.6.1 :
LYCÉE PONTUS DE TYARD Terminale VI
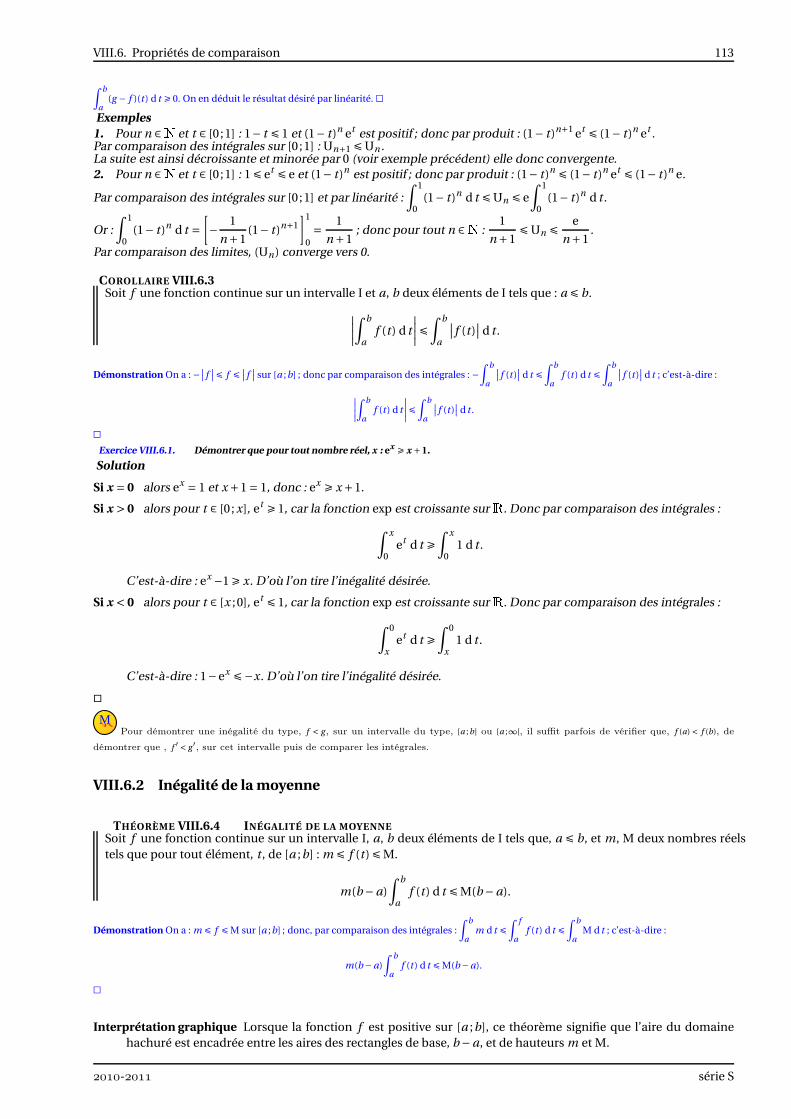
VIII.6. Propriétés de comparaison 113
∫b
a(g − f )(t ) d t Ê 0. On en déduit le résultat désiré par linéarité. ä
Exemples1. Pour n ∈N et t ∈ [0;1] : 1− t É 1 et (1− t)n et est positif ; donc par produit : (1− t)n+1 et É (1− t)n et .Par comparaison des intégrales sur [0;1] : Un+1 É Un .La suite est ainsi décroissante et minorée par 0 (voir exemple précédent) elle donc convergente.2. Pour n ∈N et t ∈ [0;1] : 1 É et É e et (1− t)n est positif ; donc par produit : (1− t)n É (1− t)n et É (1− t)n e.
Par comparaison des intégrales sur [0;1] et par linéarité :∫1
0(1− t)n d t É Un É e
∫1
0(1− t)n d t .
Or :∫1
0(1− t)n d t =
[
−1
n+1(1− t)n+1
]1
0=
1
n+1; donc pour tout n ∈N :
1
n+1É Un É
e
n+1.
Par comparaison des limites, (Un) converge vers 0.
COROLLAIRE VIII.6.3Soit f une fonction continue sur un intervalle I et a, b deux éléments de I tels que : a É b.
∣∣∣∣
∫b
af (t) d t
∣∣∣∣É
∫b
a
∣∣ f (t)
∣∣ d t .
Démonstration On a : −∣∣ f
∣∣É f É
∣∣ f
∣∣ sur [a ;b] ; donc par comparaison des intégrales : −
∫b
a
∣∣ f (t )
∣∣ d t É
∫b
af (t ) d t É
∫b
a
∣∣ f (t )
∣∣ d t ; c’est-à-dire :
∣∣∣∣
∫b
af (t ) d t
∣∣∣∣É
∫b
a
∣∣ f (t )
∣∣ d t .
äExercice VIII.6.1. Démontrer que pour tout nombre réel, x : ex Ê x +1.
Solution
Si x = 0 alors ex = 1 et x +1 = 1, donc : ex Ê x +1.
Si x > 0 alors pour t ∈ [0; x], et Ê 1, car la fonction exp est croissante surR. Donc par comparaison des intégrales :
∫x
0et d t Ê
∫x
01 d t .
C’est-à-dire : ex −1 Ê x. D’où l’on tire l’inégalité désirée.
Si x < 0 alors pour t ∈ [x ;0], et É 1, car la fonction exp est croissante surR. Donc par comparaison des intégrales :
∫0
xet d t Ê
∫0
x1 d t .
C’est-à-dire : 1−ex É−x. D’où l’on tire l’inégalité désirée.
MMPour démontrer une inégalité du type, f < g , sur un intervalle du type, [a ; b] ou [a ;∞[, il suffit parfois de vérifier que, f (a) < f (b), de
démontrer que , f ′ < g ′, sur cet intervalle puis de comparer les intégrales.
VIII.6.2 Inégalité de la moyenne
THÉORÈME VIII.6.4 INÉGALITÉ DE LA MOYENNESoit f une fonction continue sur un intervalle I, a, b deux éléments de I tels que, a É b, et m, M deux nombres réelstels que pour tout élément, t , de [a ;b] : m É f (t) É M.
m(b −a)∫b
af (t) d t É M(b −a).
Démonstration On a : m É f ÉM sur [a ;b] ; donc, par comparaison des intégrales :∫b
am d t É
∫ f
af (t ) d t É
∫b
aM d t ; c’est-à-dire :
m(b−a)∫b
af (t ) d t É M(b−a).
ä
Interprétation graphique Lorsque la fonction f est positive sur [a ;b], ce théorème signifie que l’aire du domainehachuré est encadrée entre les aires des rectangles de base, b −a, et de hauteurs m et M.
- série S

114 VIII. Intégration
1
2
a b
b −a
m
M
FIGURE VIII.15 – Inégalité de la moyenne.
Remarque b −a n’est autre que l’amplitude de l’intervalle [a ;b].
Exemple La fonction t 7→1
t 2est décroissante surR+⋆, donc pour t ∈ [3;5] :
1
25É
1
t 2É
1
9.
D’après l’inégalité de la moyenne appliquée à t 7→1
t 2sur l’intervalle [3;5] :
2
25É
∫5
3
d t
t 2É
2
9.
Exercice VIII.6.2. Déterminer la limite de la suite (un ) définie par : un =n∑
k=1
1
k6.
Solution La fonction, f : t 7→1
t, est décroissante surR+⋆, donc pour tout k ∈N⋆ :
1
k +1É
1
tÉ
1
ksur [k ;k +1].
D’après l’inégalité de la moyenne appliquée à f sur l’intervalle [k ;k +1] :
1
k +1É
∫k+1
k
d t
tÉ
1
k.
En additionnant membre à membre les n inégalités ainsi obtenues pour k variant de 1 à n, il vient :
n∑
k=1
1
k +1É
n∑
k=1
∫k+1
k
d t
tÉ
n∑
k=1
1
k.
C’est-à-dire :
un+1 −1 É∫n+1
1
d t
tÉ un .
Or :∫n+1
1
d t
t= ln(n+1) ; donc :
∀n ∈N⋆,un Ê ln(n+1) et limn→+∞
ln(n+1) =+∞.
Par comparaison des limites :lim
n→+∞un =+∞.
Voir figure VIII.16.
L’inégalité de la moyenne peut aussi s’énoncer de la façon suivante.
THÉORÈME VIII.6.5 INÉGALITÉ DE LA MOYENNESoit f une fonction continue sur un intervalle I, a, b deux éléments de I, et M un nombre réel tel que pour tout élément,t , de [a ;b] :
∣∣ f (t)
∣∣É M.
∣∣∣∣
∫b
af (t) d t
∣∣∣∣É M |b −a| .
Démonstration∣∣ f (t )
∣∣ É M, signifie : −M É f (t ) É M. Il suffit donc d’appliquer le théorème VIII.6.4 avec m = −M. Si a É b, on a : −M(b −a) É
∫b
af (t )t d ÉM(b−a) ; donc :
∣∣∣∣
∫b
af (t ) d t
∣∣∣∣ÉM |b−a|.
Si b É a, on a : −M(a −b) É∫a
bf (t )t dÉ M(a −b) ; donc :
∣∣∣∣
∫b
af (t ) d t
∣∣∣∣ÉM |b−a|. ä
6. Cette suite est appelée série harmonique.
LYCÉE PONTUS DE TYARD Terminale VI
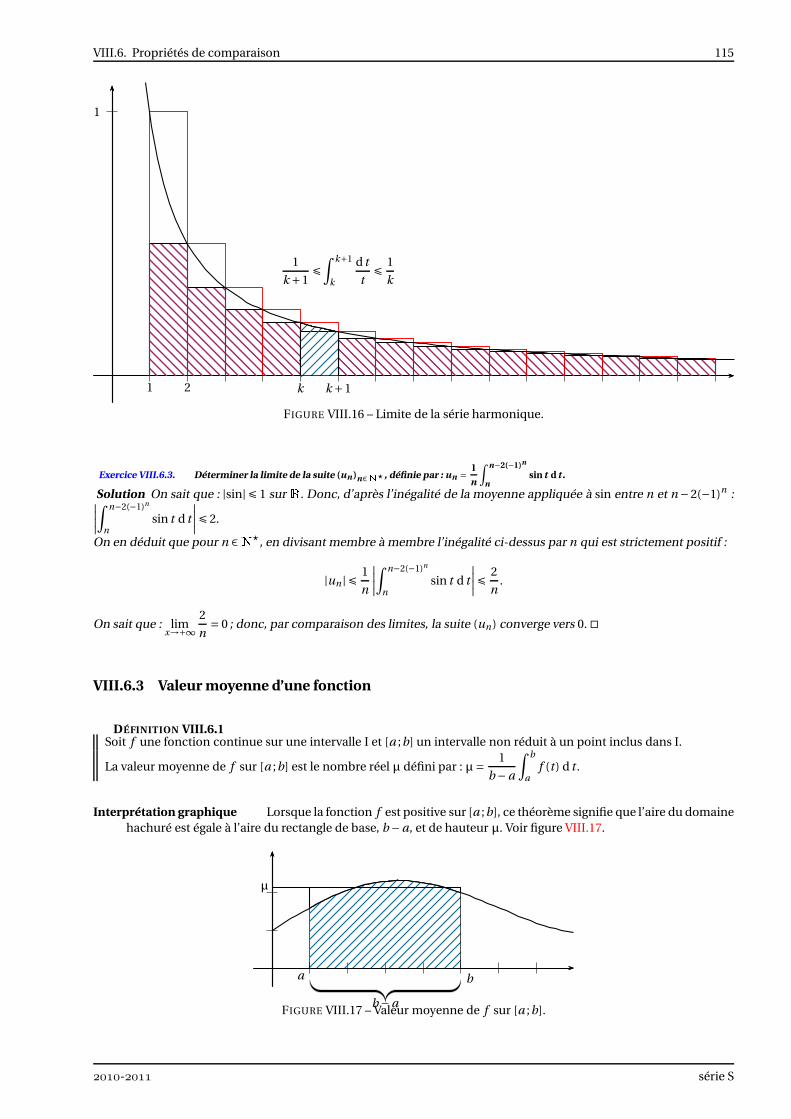
VIII.6. Propriétés de comparaison 115
1
1 2 k k +1
1
k +1É
∫k+1
k
d t
tÉ
1
k
FIGURE VIII.16 – Limite de la série harmonique.
Exercice VIII.6.3. Déterminer la limite de la suite (un )n∈N⋆ , définie par : un =1
n
∫n−2(−1)n
nsin t d t .
Solution On sait que : |sin| É 1 surR. Donc, d’après l’inégalité de la moyenne appliquée à sin entre n et n−2(−1)n :∣∣∣∣
∫n−2(−1)n
nsin t d t
∣∣∣∣É 2.
On en déduit que pour n ∈N⋆, en divisant membre à membre l’inégalité ci-dessus par n qui est strictement positif :
|un | É1
n
∣∣∣∣
∫n−2(−1)n
nsin t d t
∣∣∣∣É
2
n.
On sait que : limx→+∞
2
n= 0 ; donc, par comparaison des limites, la suite (un ) converge vers 0.
VIII.6.3 Valeur moyenne d’une fonction
DÉFINITION VIII.6.1Soit f une fonction continue sur une intervalle I et [a ;b] un intervalle non réduit à un point inclus dans I.
La valeur moyenne de f sur [a ;b] est le nombre réel µ défini par : µ=1
b −a
∫b
af (t) d t .
Interprétation graphique Lorsque la fonction f est positive sur [a ;b], ce théorème signifie que l’aire du domainehachuré est égale à l’aire du rectangle de base, b −a, et de hauteur µ. Voir figure VIII.17.
a b
b −a
µ
FIGURE VIII.17 – Valeur moyenne de f sur [a ;b].
- série S

116 VIII. Intégration
Interprétation cinématique Une droite (AB) est graduée et orientée de A vers B. Un point mobile sur l’axe parde A à l’instant t0 pour arriver en B à l’instant, t1. La vitesse moyenne du trajet est le quotient de la distanceparcourue par le mis pour la parcourir, c’est-à-dire :
vmoy =AB
t1 − t0=
x(t1)− x(t0)
t1 − t0.
Désignons respectivement par x(t) et x (t) l’abscisse et la vitesse du point mobile à l’instant t . La valeur moyenne,µ, de la vitesse sur l’intervalle [t0 ; t1] vérifie :
µ=1
t1 − t0
∫t1
t0
x(t) d t =1
t1 − t0[x(t)]t1
t0=
x(t1)− x(t0)
t1 − t0= vmoy .
On en déduit que la vitesse moyenne est la valeur moyenne de la vitesse.
Remarque On déduit de l’inégalité de la moyenne, que si m et M sont respectivement un minorant et un majorant def sur [a ;b], alors : m ÉµÉ M.
Exemples1. La valeur moyenne de la fonction sin sur l’intervalle [0;π] est :
µ1 =1
π
∫π
0sin t d t =
1
π[−cos t ]π0 =
−(−1)− (−1)
π=
2
π.
2. La valeur moyenne de la fonction sin sur l’intervalle [0;2π] est :
µ2 =1
2π
∫2π
0sin t d t =
1
2π[−cos t ]2π
0 =−(−1)− (−(−1))
2π= 0.
VIII.6.4 Exercices
VIII.6.a. Peut-on, sans calcul, déterminer le signes des in-tégrales suivantes ?
a.∫1
−2
d x
x2 +1. b.
∫ 32
12
ex ln x d x.
c.∫ π
4
π3
d t
cos t. d.
∫0,8
0,2ex ln x d x.
VIII.6.b. 1. Justifier que pour tout t ∈ [0;1] :
0É et É e.
2. En déduire que pour tout x ∈ [0;1] :
x +1 É ex É e x +1.
VIII.6.c. 1. Démontrer que pour tout x ∈ [1;+∞[] :
ln x É x −1
2. Démontrer que pour tout x ∈]0;1] :
ln x É x −1
VIII.6.d. 1. Justifier que pour tout t ∈[π
6;π
2
]
:
1É1
sin tÉ 2.
2. En déduire que :
3
πÉ
∫ π2
π6
d t
sin tÉ
6
π.
VIII.6.e. Démontrer que : 105 É∫16
9
√
x2 +144 d x É 140.
VIII.6.f. Déterminer la valeur moyenne de x 7→ x2 sur[1;4].
VIII.6.g. Déterminer la valeur moyenne de x 7→ x2 sur[−1;1].
VIII.6.h. Soit f une fonction continue sur un intervalle[a ;b] ; m, µ et M sont respectivement un minorant, la va-leur moyenne et un majorant de f sur [a ;b].Démontrer que : m ÉµÉ M.
LYCÉE PONTUS DE TYARD Terminale VI

VIII.7. Autres techniques de calcul 117
VIII.7 Autres techniques de calcul
VIII.7.1 Intégration par parties
THÉORÈME VIII.7.1Soit u et v deux fonctions continûment dérivables 7sur un intervalle I et a, b deux éléments de I.
∫b
au′(t)v(t) d t = [u(t)v(t)]b
a −∫b
au(t)v ′(t) d t
Démonstration On a : (uv)′ = u′v +uv ′ ; donc : u′v = (uv)′ −uv ′ . Les fonctions u et v sont continûment dérivables sur I, donc les fonctions, u′v,(uv)′ et uv ′ sont continues sur I. En intégrant terme à terme la dernière identité, il vient :
∫b
au′(t )v(t ) d t =
∫b
a(uv)′(t ) d t −
∫b
au(t )v ′(t ) d t = [u(t )v(t )]b
a −∫b
au(t )v ′(t ) d t .
äExercice VIII.7.1. Calculer :
∫π
0t sin t d t .
Solution Posons : v(t) = t et u′(t) = sin t . On a, v ′(t)= 1, et on peut prendre : u(t) =−cos t .Les fonctions u et v sont continûment dérivables surR, en intégrant par parties, il vient :
∫π
0t sin t d t = [−t cos t ]π0 −
∫π
0−cos t d t =π+ [sin t ]π0 =π.
Exercice VIII.7.2. Déterminer une primitive sur ]0;+∞[ de la fonction ln.
Solution D’après le corollaire VIII.4.3, La primitive de fonction ln nulle en 1 est la fonction, F, définie par :
F(x) =∫x
1ln t d t .
Posons : v(t)= ln t et u′(t) = 1. On a, v ′(t)=1
t, et on peut prendre : u(t) = t .
Les fonctions u et v sont continûment dérivables sur ]0;+∞[, en intégrant par parties, il vient :
F(x) = [t ln t ]x1 −
∫x
1t ×
1
td t = x ln x − [t ]x
1 = x ln x − x +1
On peut être amener à enchaîner plusieurs intégrations par parties pour obtenir un résultat.
Exercice VIII.7.3. Calculer :∫π
0t 2 cos t d t .
Solution Posons : v(t) = t 2 et u′(t) = cos t . On a, v ′(t) = 2t , et on peut prendre : u(t) = sin t .Les fonctions u et v sont continûment dérivables surR, en intégrant par parties, il vient :
∫π
0t 2 cos t d t =
[
t 2 sin t]π
0 −∫π
02t sin t d t =−2
∫π
0t sin t d t =−2π
Exercice VIII.7.4. Calculer : I =∫π
0e3t cos 2t d t .
Solution Posons : v(t) = cos2t et u′(t)= e3t . On a, v ′(t) =−2sin 2t , et on peut prendre : u(t) =1
3e3t .
Les fonctions u et v sont continûment dérivables surR, en intégrant par parties, il vient :
I =[
1
3e3t cos2t
]π
0−
∫π
0−
2
3sin 2t e3t d t =
1
3e3π−
1
3+
2
3
∫π
0sin t e3t d t .
Calculons :∫π
0sin 2t e3t d t .
Posons : v(t)= sin 2t et u′(t) = e3t . On a, v ′(t) = 2cos 2t , et on peut prendre : u(t) =1
3e3t .
Les fonctions u et v sont continûment dérivables surR, en intégrant par parties, il vient :∫π
0sin 2t e3t d t =
[1
3e3t sin 2t
]π
0−
∫π
0
2
3cos 2t e3t d t =−
2
3I.
7. Une fonction continûment dérivable sur un intervalle, I, est une fonction dérivable sur I, dont la dérivée est continue sur I.
- série S

118 VIII. Intégration
Ainsi : 3I = e3π−1−4
3I. On en déduit que :
I =3
13
(
e3π−1)
Exercice VIII.7.5. 1. (Un ) est la suite introduite à la deuxième ligne de section VIII.6.
Déterminer une expression de Un+1 en fonction de Un , valable pour tout entier naturel, n.
2. En déduire la résolution du problème ouvert énoncé à la sous-section VIII.4.1
Solution 1. Soit n un entier naturel. On a :
Un+1 =∫1
0(1− t)n+1 et d t
Posons : v(t) = (1− t)n+1 et u′(t) = et . On a, v ′(t)=−(n+1)(1− t)n , et on peut prendre : u(t) = et .Les fonctions u et v sont continûment dérivables surR, en intégrant par parties, il vient :
Un+1 =[
(1− t)n+1 et]1
0 −∫1
0−(n+1)(1− t)n et d t =−1+ (n+1)Un
Donc, pour tout entier naturel, n :Un+1 =−1+ (n+1)Un
2. Ainsi la suite(Un ) a la même relation de récurrence que la suite (un ) introduite à la sous-section VIII.4.1. Si de plusces deux suites avaient le même premier termes, elles seraient alors égales.On sait que : u0 = e−1. Calculons U0. On a :
U0 =∫1
0et d t =
[
et]1
0 = e−1.
Les suites (Un ) et (un ) sont égales, donc la suite(un ) est décroissante et converge vers 0.
MMPour établir la relation de récurrence d’une suite définie par une intégrale, on utilise souvent une (ou plusieurs) intégration par parties.
VIII.7.2 Intégration et invariance géométrique
VIII.7.2.a Intégration de fonctions paires ou impaires
THÉORÈME VIII.7.2Soit f une fonction continue sur un intervalle I, symétrique par rapport à 0.
(1) Si f est paire, alors pour tout élément a de I :
∫a
−af (t) d t = 2
∫a
0f (t) d t .
(2) Si f est impaire, alors pour tout élément a de I :
∫a
−af (t) d t = 0.
Démonstration Soit F une primitive de f sur I.
Si f est paire On introduit la fonction, G définie sur I par : G(x) = 2∫x
0f (t ) d t −
∫x
−xf (t ) d t = 2(F(x)−F(0))−(F(x)−F(−x))F(x)+F(−x)−2F(0).
La fonction F est dérivable sur I, donc G aussi et pour tout élément,x, de I : G′(x) = f (x)− f (−x) = 0 (car f est paire).
La fonction G est donc constante sur l’intervalle I et pour tout élément,a, de I : G(a) = G(0) = 0 ; d’où :∫a
−af (t ) d t = 2
∫a
0f (t ) d t .
Si f est impaire On introduit la fonction, G définie sur I par : G(x) =∫x
−xf (t ) d t = F(x)−F(−x).
La fonction F est dérivable sur I, donc G aussi et pour tout élément,x, de I : G′(x) = f (x)+ f (−x) = 0 (car f est impaire).
La fonction G est donc constante sur l’intervalle I et pour tout élément,a, de I :∫a
−af (t ) d t = G(a) =G(0) =
∫0
0f (t ) d t = 0.
äRemarques
1. Lorsque f est paire, l’égalité est équivalente à :∫0
−af (t) d t =
∫a
0f (t) d t .
En effet, on passe de l’une à l’autre en ajoutant ou en retranchant membre à membre∫a
0f (t) d t .
LYCÉE PONTUS DE TYARD Terminale VI
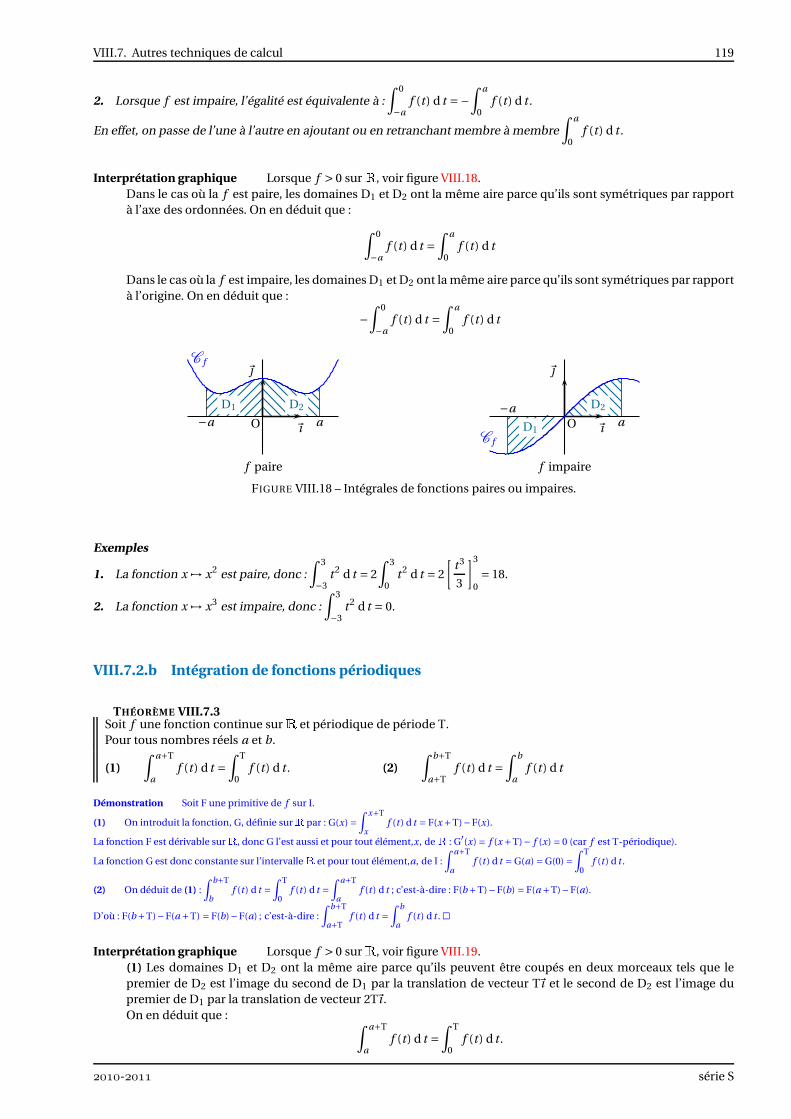
VIII.7. Autres techniques de calcul 119
2. Lorsque f est impaire, l’égalité est équivalente à :∫0
−af (t) d t =−
∫a
0f (t) d t .
En effet, on passe de l’une à l’autre en ajoutant ou en retranchant membre à membre∫a
0f (t) d t .
Interprétation graphique Lorsque f > 0 surR, voir figure VIII.18.Dans le cas où la f est paire, les domaines D1 et D2 ont la même aire parce qu’ils sont symétriques par rapportà l’axe des ordonnées. On en déduit que :
∫0
−af (t) d t =
∫a
0f (t) d t
Dans le cas où la f est impaire, les domaines D1 et D2 ont la même aire parce qu’ils sont symétriques par rapportà l’origine. On en déduit que :
−∫0
−af (t) d t =
∫a
0f (t) d t
~ı
~
O
D1 D2
−a a
C f
f paire
~ı
~
OD1
D2−aa
C f
f impaire
FIGURE VIII.18 – Intégrales de fonctions paires ou impaires.
Exemples
1. La fonction x 7→ x2 est paire, donc :∫3
−3t 2 d t = 2
∫3
0t 2 d t = 2
[t 3
3
]3
0= 18.
2. La fonction x 7→ x3 est impaire, donc :∫3
−3t 2 d t = 0.
VIII.7.2.b Intégration de fonctions périodiques
THÉORÈME VIII.7.3Soit f une fonction continue surR et périodique de période T.Pour tous nombres réels a et b.
(1)∫a+T
af (t) d t =
∫T
0f (t) d t . (2)
∫b+T
a+Tf (t) d t =
∫b
af (t) d t
Démonstration Soit F une primitive de f sur I.
(1) On introduit la fonction, G, définie surR par : G(x) =∫x+T
xf (t ) d t = F(x +T)−F(x).
La fonction F est dérivable surR, donc G l’est aussi et pour tout élément,x, deR : G′(x) = f (x +T)− f (x) = 0 (car f est T-périodique).
La fonction G est donc constante sur l’intervalleR et pour tout élément,a, de I :∫a+T
af (t ) d t = G(a) =G(0) =
∫T
0f (t ) d t .
(2) On déduit de (1) :∫b+T
bf (t ) d t =
∫T
0f (t ) d t =
∫a+T
af (t ) d t ; c’est-à-dire : F(b+T)−F(b) = F(a +T)−F(a).
D’où : F(b+T)−F(a +T) = F(b)−F(a) ; c’est-à-dire :∫b+T
a+Tf (t ) d t =
∫b
af (t ) d t . ä
Interprétation graphique Lorsque f > 0 surR, voir figure VIII.19.(1) Les domaines D1 et D2 ont la même aire parce qu’ils peuvent être coupés en deux morceaux tels que lepremier de D2 est l’image du second de D1 par la translation de vecteur T~ı et le second de D2 est l’image dupremier de D1 par la translation de vecteur 2T~ı .On en déduit que :
∫a+T
af (t) d t =
∫T
0f (t) d t .
- série S
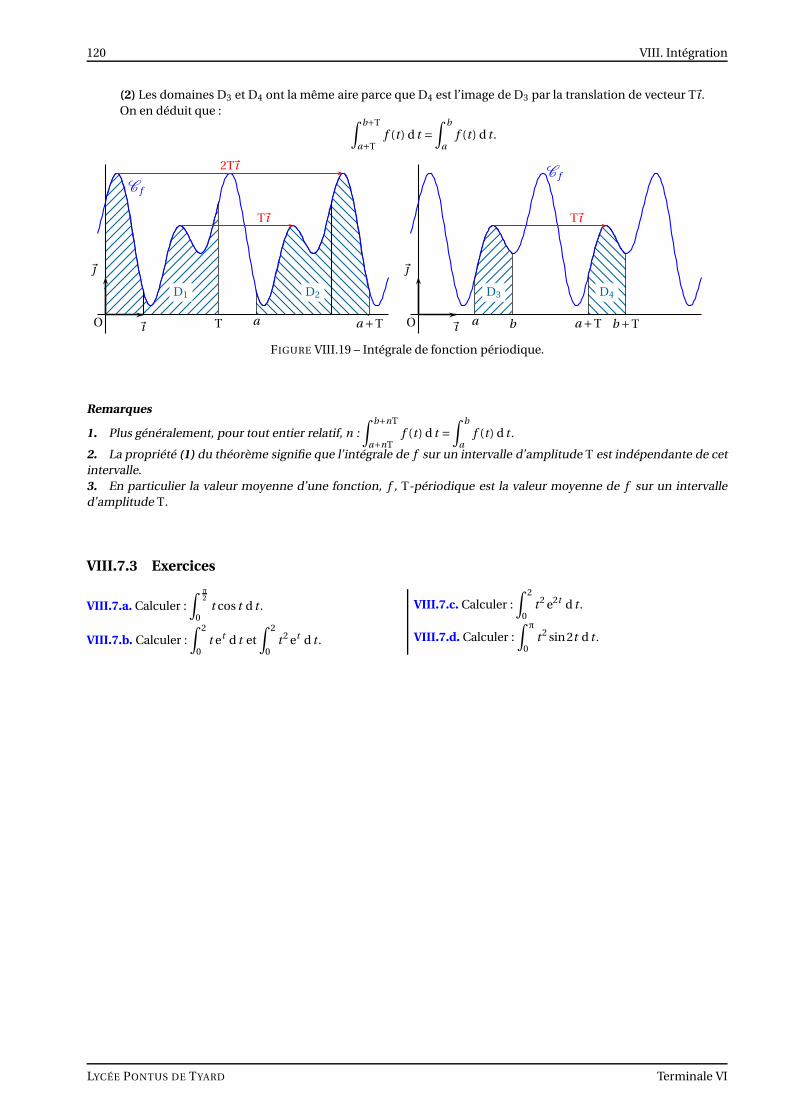
120 VIII. Intégration
(2) Les domaines D3 et D4 ont la même aire parce que D4 est l’image de D3 par la translation de vecteur T~ı .On en déduit que :
∫b+T
a+Tf (t) d t =
∫b
af (t) d t .
~ı
~
O
D1 D2
T a a +T
C f
T~ı
2T~ı
~ı
~
O
D3 D4
a b a +T b +T
C f
T~ı
FIGURE VIII.19 – Intégrale de fonction périodique.
Remarques
1. Plus généralement, pour tout entier relatif, n :∫b+nT
a+nTf (t) d t =
∫b
af (t) d t .
2. La propriété (1) du théorème signifie que l’intégrale de f sur un intervalle d’amplitude T est indépendante de cetintervalle.3. En particulier la valeur moyenne d’une fonction, f , T-périodique est la valeur moyenne de f sur un intervalled’amplitude T.
VIII.7.3 Exercices
VIII.7.a. Calculer :∫ π
2
0t cos t d t .
VIII.7.b. Calculer :∫2
0t et d t et
∫2
0t 2 et d t .
VIII.7.c. Calculer :∫2
0t 2 e2t d t .
VIII.7.d. Calculer :∫π
0t 2 sin 2t d t .
LYCÉE PONTUS DE TYARD Terminale VI
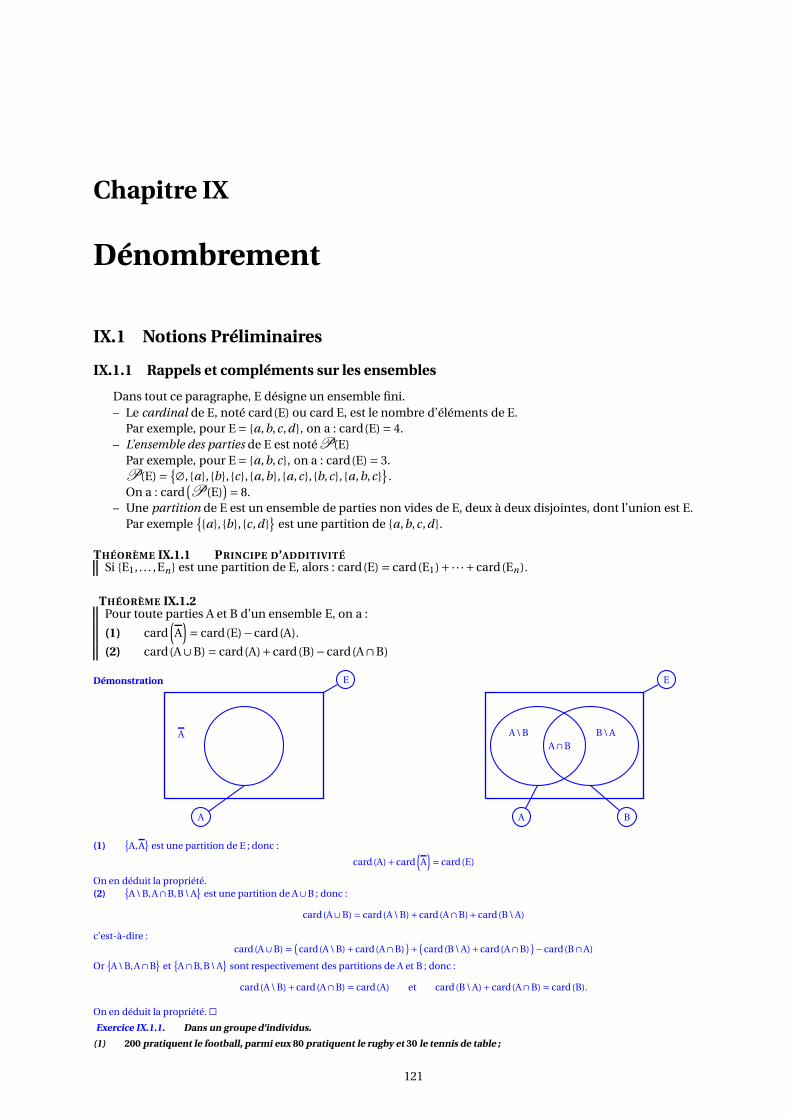
Chapitre IX
Dénombrement
IX.1 Notions Préliminaires
IX.1.1 Rappels et compléments sur les ensembles
Dans tout ce paragraphe, E désigne un ensemble fini.– Le cardinal de E, noté card(E) ou card E, est le nombre d’éléments de E.
Par exemple, pour E= a,b,c,d, on a : card(E) = 4.– L’ensemble des parties de E est notéP(E)
Par exemple, pour E= a,b,c, on a : card(E) = 3.P(E) =
∅, a, b, c, a,b, a,c, b,c, a,b,c
.On a : card
(
P(E))
= 8.– Une partition de E est un ensemble de parties non vides de E, deux à deux disjointes, dont l’union est E.
Par exemple
a, b, c,d
est une partition de a,b,c,d.
THÉORÈME IX.1.1 PRINCIPE D’ADDITIVITÉSi E1, . . . ,En est une partition de E, alors : card(E) = card(E1)+·· ·+card(En ).
THÉORÈME IX.1.2Pour toute parties A et B d’un ensemble E, on a :
(1) card(
A)
= card(E)−card(A).
(2) card(A∪B) = card(A)+card(B)−card(A∩B)
Démonstration
A
A
E
A∩BA \ B B \ A
A B
E
(1)
A,A
est une partition de E ; donc :
card(A)+card(
A)
= card(E)
On en déduit la propriété.(2)
A \ B,A∩B,B \ A
est une partition de A∪B ; donc :
card(A∪B) = card(A \ B)+card(A∩B)+card(B \ A)
c’est-à-dire :card(A∪B) =
(
card(A \ B)+card(A∩B))
+(
card(B \ A)+card(A∩B))
−card(B∩A)
Or
A \ B,A∩B
et
A∩B,B \ A
sont respectivement des partitions de A et B ; donc :
card(A \ B)+card(A∩B) = card(A) et card(B \ A)+card(A∩B) = card(B).
On en déduit la propriété. äExercice IX.1.1. Dans un groupe d’individus.
(1) 200 pratiquent le football, parmi eux 80 pratiquent le rugby et 30 le tennis de table ;
121
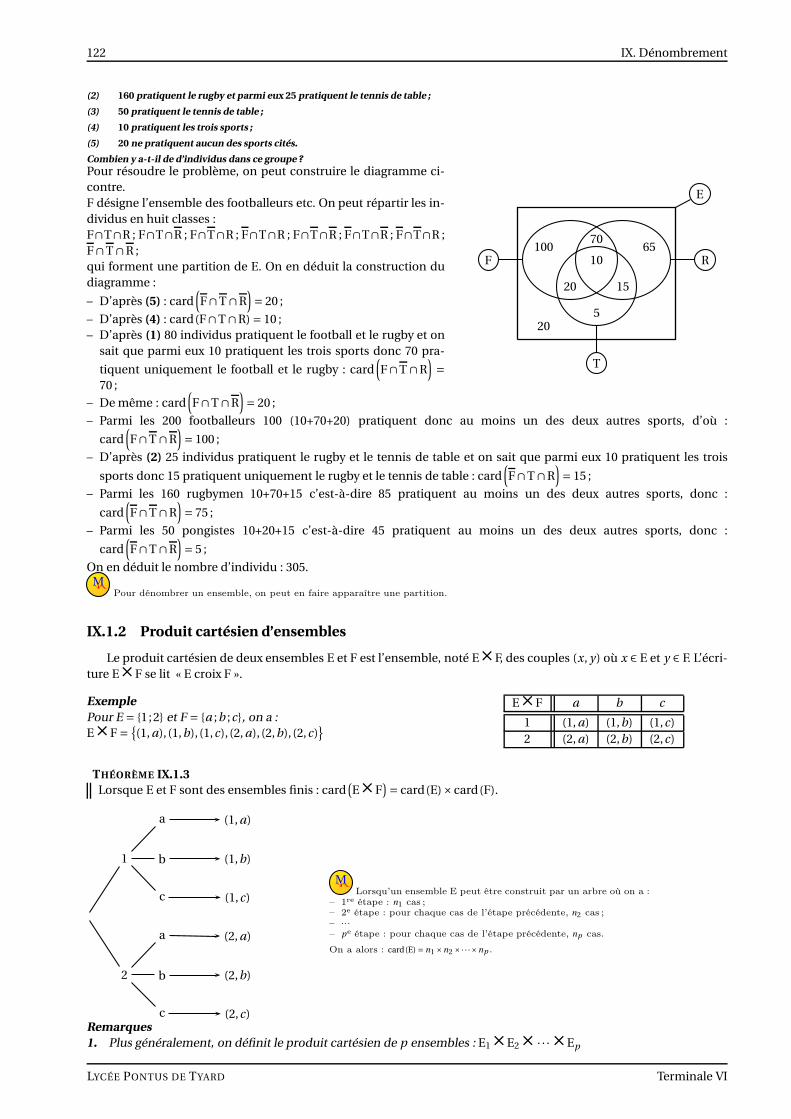
122 IX. Dénombrement
(2) 160 pratiquent le rugby et parmi eux 25 pratiquent le tennis de table ;
(3) 50 pratiquent le tennis de table ;
(4) 10 pratiquent les trois sports ;
(5) 20 ne pratiquent aucun des sports cités.
Combien y a-t-il de d’individus dans ce groupe ?Pour résoudre le problème, on peut construire le diagramme ci-contre.F désigne l’ensemble des footballeurs etc. On peut répartir les in-dividus en huit classes :F∩T∩R ; F∩T∩R ; F∩T∩R ; F∩T∩R ; F∩T∩R ; F∩T∩R ; F∩T∩R ;F∩T∩R ;qui forment une partition de E. On en déduit la construction dudiagramme :
– D’après (5) : card(
F∩T∩R)
= 20 ;
– D’après (4) : card(F∩T∩R) = 10 ;– D’après (1) 80 individus pratiquent le football et le rugby et on
sait que parmi eux 10 pratiquent les trois sports donc 70 pra-
tiquent uniquement le football et le rugby : card(
F∩T∩R)
=70 ;
70
10100 65
520
20 15
F R
T
E
– De même : card(
F∩T∩R)
= 20 ;
– Parmi les 200 footballeurs 100 (10+70+20) pratiquent donc au moins un des deux autres sports, d’où :
card(
F∩T∩R)
= 100 ;
– D’après (2) 25 individus pratiquent le rugby et le tennis de table et on sait que parmi eux 10 pratiquent les trois
sports donc 15 pratiquent uniquement le rugby et le tennis de table : card(
F∩T∩R)
= 15 ;
– Parmi les 160 rugbymen 10+70+15 c’est-à-dire 85 pratiquent au moins un des deux autres sports, donc :
card(
F∩T∩R)
= 75 ;
– Parmi les 50 pongistes 10+20+15 c’est-à-dire 45 pratiquent au moins un des deux autres sports, donc :
card(
F∩T∩R)
= 5 ;
On en déduit le nombre d’individu : 305.MM
Pour dénombrer un ensemble, on peut en faire apparaître une partition.
IX.1.2 Produit cartésien d’ensembles
Le produit cartésien de deux ensembles E et F est l’ensemble, noté E×F, des couples (x, y) où x ∈ E et y ∈ F. L’écri-ture E×F se lit « E croix F ».
ExemplePour E = 1;2 et F = a ;b ;c, on a :E×F =
(1, a), (1,b), (1,c), (2, a), (2,b), (2,c)
E×F a b c
1 (1, a) (1,b) (1,c)2 (2, a) (2,b) (2,c)
THÉORÈME IX.1.3Lorsque E et F sont des ensembles finis : card
(
E×F)
= card(E)×card(F).
1
a (1, a)
b (1,b)
c (1,c)
2
a (2, a)
b (2,b)
c (2,c)
MMLorsqu’un ensemble E peut être construit par un arbre où on a :
– 1re étape : n1 cas ;– 2e étape : pour chaque cas de l’étape précédente, n2 cas ;– · · ·– pe étape : pour chaque cas de l’étape précédente, np cas.
On a alors : card(E) = n1 ×n2 ×·· ·×np .
Remarques1. Plus généralement, on définit le produit cartésien de p ensembles : E1×E2× · · ·×Ep
LYCÉE PONTUS DE TYARD Terminale VI

IX.2. Factorielle 123
2. Lorsque E1, . . ., Ep sont finis, on a : card(
E1×E2× · · ·×Ep
)
= card(E1)×·· ·×card(
Ep
)
.3. En particulier, l’ensemble E×E× · · ·×E
︸ ︷︷ ︸
p fois
est noté Ep . Les éléments de Ep sont les p-uplets, ou p-listes, d’élé-
ments de E. Et on a : card(
Ep)
= card(E)p .
Exercice IX.1.2. Combien y a-t-il de codes possibles dans un cadenas présentant quatre molettes de dix chiffres chacune.
Solution Considérons l’ensemble : E = 0;1; 2;3;4; 5;6;7;8;9 ; card(E) = 10. L’ensemble des codes est l’ensembledes quadruplets (c1;c2;c3;c4) d’éléments de E. Il y a donc card
(
E4), c’est-à-dire 10 000, codes possibles.
IX.2 Factorielle
DÉFINITION IX.2.1Soit n un entier naturel, on appelle n! (lire : « factorielle n » ) l’entier naturel non nul défini par :
n! =
1×2×·· · ×n , si n , 0;
1 , si n = 0.
Exemples1. 0! = 1 ; 1! = 1.2. 5! = 1×2×3×4×5 = 120 ; ou encore : 5! = 3!×4×5.
3.6!
4!= 5×6 ;
12!
4!×8!=
12×11×10×9
1×2×3×4= 445.
Plus généralement, pour 0É p É n :n!
p != (p +1)×·· ·×n.
4. Exercice IX.2.1. Une mère a quatre petits garçons, elle a acheté quatre voitures de couleurs différentes.
De combien de façons peut-elle attribuer une voiture à chacun ?
Elle a :⊲ 4 choix possibles pour attribuer la première voiture ;⊲ 3 choix possibles pour attribuer la deuxième voiture ;⊲ 2 choix possibles pour attribuer la troisième voiture ;⊲ 1 choix possible pour attribuer la dernière voiture.
Soit en tout 4 ! = 24.5. Plus généralement pour construire une bijection d’un ensemble E vers un ensemble F, de même cardinal n. On a :⊲ n choix possibles pour attribuer l’image du premier élément ;⊲ n−1 choix possibles pour attribuer l’image du deuxième élément ;
...⊲ n−k +1 choix possibles pour attribuer l’image du ke élément ;
...⊲ 1 choix possible pour attribuer l’image du dernier élément.
Soit en tout n !.
On en déduit le théorème suivant.THÉORÈME IX.2.1
Le nombre de bijections d’un ensemble E vers un ensemble F, de même cardinal n, est n!.
Exercice IX.2.2. Un groupe de six personnes décide de s’asseoir autour d’une table à six places. De combien de façons les individus peuvent
ils se répartir autour de la table ?
Solution Chaque répartition est une bijection entre l’ensemble des individus et l’ensemble des places, il y a donc 6!répartitions possibles, c’est-à-dire : 720.
Remarque Deux ensembles images l’un de l’autre par une bijection ont même cardinal.
DÉFINITION IX.2.2Une permutation d’un ensemble E est une bijection de E vers E.
- série S
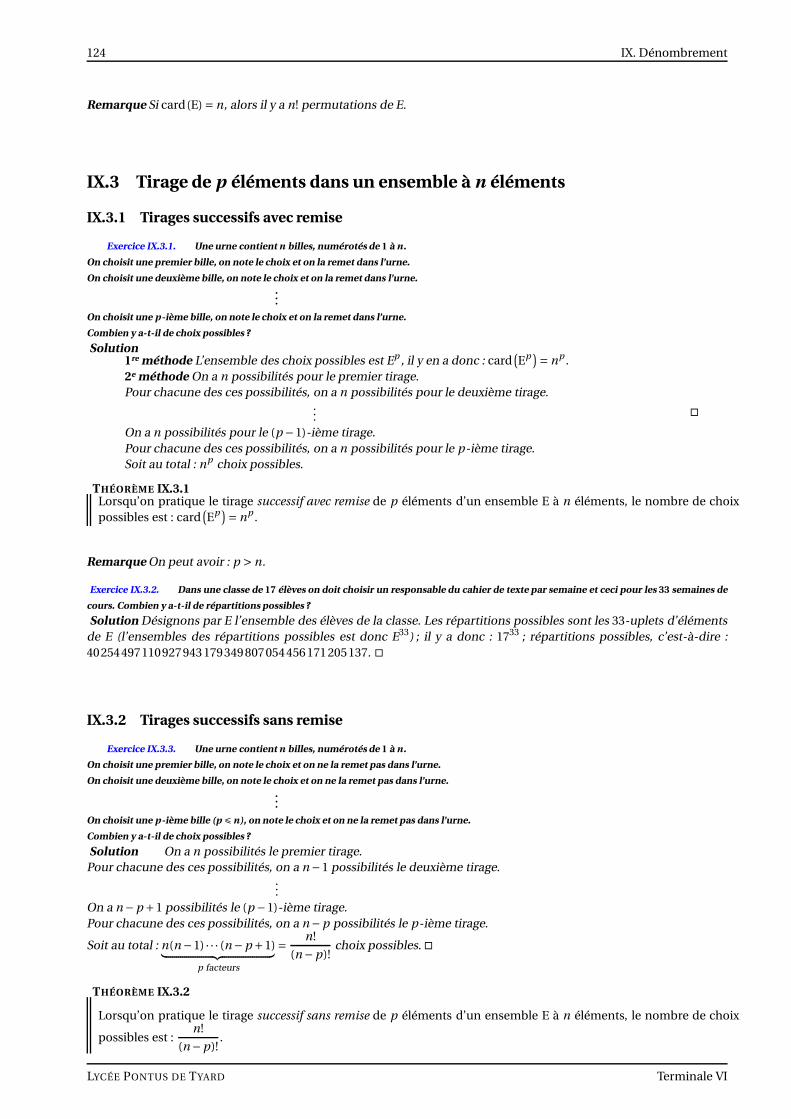
124 IX. Dénombrement
Remarque Si card(E) = n, alors il y a n! permutations de E.
IX.3 Tirage de p éléments dans un ensemble à n éléments
IX.3.1 Tirages successifs avec remise
Exercice IX.3.1. Une urne contient n billes, numérotés de 1 à n.
On choisit une premier bille, on note le choix et on la remet dans l’urne.
On choisit une deuxième bille, on note le choix et on la remet dans l’urne....
On choisit une p-ième bille, on note le choix et on la remet dans l’urne.
Combien y a-t-il de choix possibles ?
Solution1re méthode L’ensemble des choix possibles est Ep , il y en a donc : card
(
Ep)
= np .2e méthode On a n possibilités pour le premier tirage.Pour chacune des ces possibilités, on a n possibilités pour le deuxième tirage.
...On a n possibilités pour le (p −1)-ième tirage.Pour chacune des ces possibilités, on a n possibilités pour le p-ième tirage.Soit au total : np choix possibles.
THÉORÈME IX.3.1Lorsqu’on pratique le tirage successif avec remise de p éléments d’un ensemble E à n éléments, le nombre de choixpossibles est : card
(
Ep)
= np .
Remarque On peut avoir : p > n.
Exercice IX.3.2. Dans une classe de 17 élèves on doit choisir un responsable du cahier de texte par semaine et ceci pour les 33 semaines de
cours. Combien y a-t-il de répartitions possibles ?
Solution Désignons par E l’ensemble des élèves de la classe. Les répartitions possibles sont les 33-uplets d’élémentsde E (l’ensembles des répartitions possibles est donc E33) ; il y a donc : 1733 ; répartitions possibles, c’est-à-dire :40254497110927943179349807054456171205137.
IX.3.2 Tirages successifs sans remise
Exercice IX.3.3. Une urne contient n billes, numérotés de 1 à n.
On choisit une premier bille, on note le choix et on ne la remet pas dans l’urne.
On choisit une deuxième bille, on note le choix et on ne la remet pas dans l’urne....
On choisit une p-ième bille (p É n), on note le choix et on ne la remet pas dans l’urne.
Combien y a-t-il de choix possibles ?
Solution On a n possibilités le premier tirage.Pour chacune des ces possibilités, on a n−1 possibilités le deuxième tirage.
...On a n−p +1 possibilités le (p −1)-ième tirage.Pour chacune des ces possibilités, on a n−p possibilités le p-ième tirage.
Soit au total : n(n−1) · · · (n−p +1)︸ ︷︷ ︸
p facteurs
=n!
(n−p)!choix possibles.
THÉORÈME IX.3.2
Lorsqu’on pratique le tirage successif sans remise de p éléments d’un ensemble E à n éléments, le nombre de choix
possibles est :n!
(n−p)!.
LYCÉE PONTUS DE TYARD Terminale VI

IX.3. Tirage de p éléments dans un ensemble à n éléments 125
Remarque On a nécessairement : 0É p É n.
Exercice IX.3.4. Une course de chevaux, pour le tiercé, a 17 partants. Combien a t-on d’arrivées possibles ?
Solution Désignons par E l’ensemble des chevaux. Les arrivées possibles sont les triplets d’éléments distincts de E ; il
y a donc :17!
(17−3)!; arrivées possibles, c’est-à-dire : 17×16×15 = 4080.
Remarque Lorsque p = n, un tirage est une bijection de E vers 1;2; · · · ;n et on obtient n! tirages possibles.
IX.3.3 Combinaisons - Tirages simultanés
IX.3.3.a Combinaisons
DÉFINITION IX.3.1Soit E un ensemble de n éléments et p un entier tel que 0 É p É n.Une combinaison de p éléments de E est une partie de E qui contient p éléments.
Exemple Pour E = a,b,c et p = 2.Les combinaisons de deux éléments de E sont les parties : a,b ; a,c ; b,c.
Remarques1. Dans un ensemble, les éléments sont deux à deux distincts.Ainsi a,b, a n’est pas un ensemble car il contient deux fois a.2. Deux ensembles qui contiennent les mêmes éléments sont égaux.Ainsi : a,b = b, a.
Notation Le nombre de parties (i.e. de combinaisons) de p éléments d’un ensemble de n éléments est noté C p
nou
(
n
p
)
, 0 É p É n.
Exemples
1. De l’exemple ci-dessus, on déduit que :
(
3
2
)
= 3 ;
2. E est un ensemble à n éléments. Il n’existe qu’une partie de E qui contient zéro élément, c’est l’ensemble vide,
donc :
(
n
0
)
= 1
3. une seule partie de E contient n éléments, c’est E lui-même, donc :
(
n
n
)
= 1 ;
4. il y a autant d’éléments que de singletons, donc :
(
n
1
)
= n.
THÉORÈME IX.3.3
Pour tous entiers p et n tels que : 0 É p É n ; on a :(
n
p
)
=n!
p !(n−p)!.
Démonstration Soit A une combinaison de p éléments de E. Pour former avec les éléments de A un p-uplet d’éléments distincts on choisit quelélément sera le premier, quel élément (parmi les éléments restants) sera le deuxième et ainsi de suite. Choisir un p-uplet d’éléments distincts de Ac’est donc se donner une bijection entre A et 1; . . . ;p. On peut donc former p! p-uplets d’éléments distincts de A. Plus généralement, avec chaque
combinaison de p éléments de E on peut former p! p-uplets d’éléments distincts. Or il y a
(
n
p
)
combinaisons de E à p éléments, il y a donc en tout
p!
(
n
p
)
p-uplets d’éléments distincts de E. Donc, d’après le théorème IX.3.2 :
p!
(
n
p
)
=n!
(n −p)!.
On en déduit que :(
n
p
)
=n!
p!(n −p)!
- série S
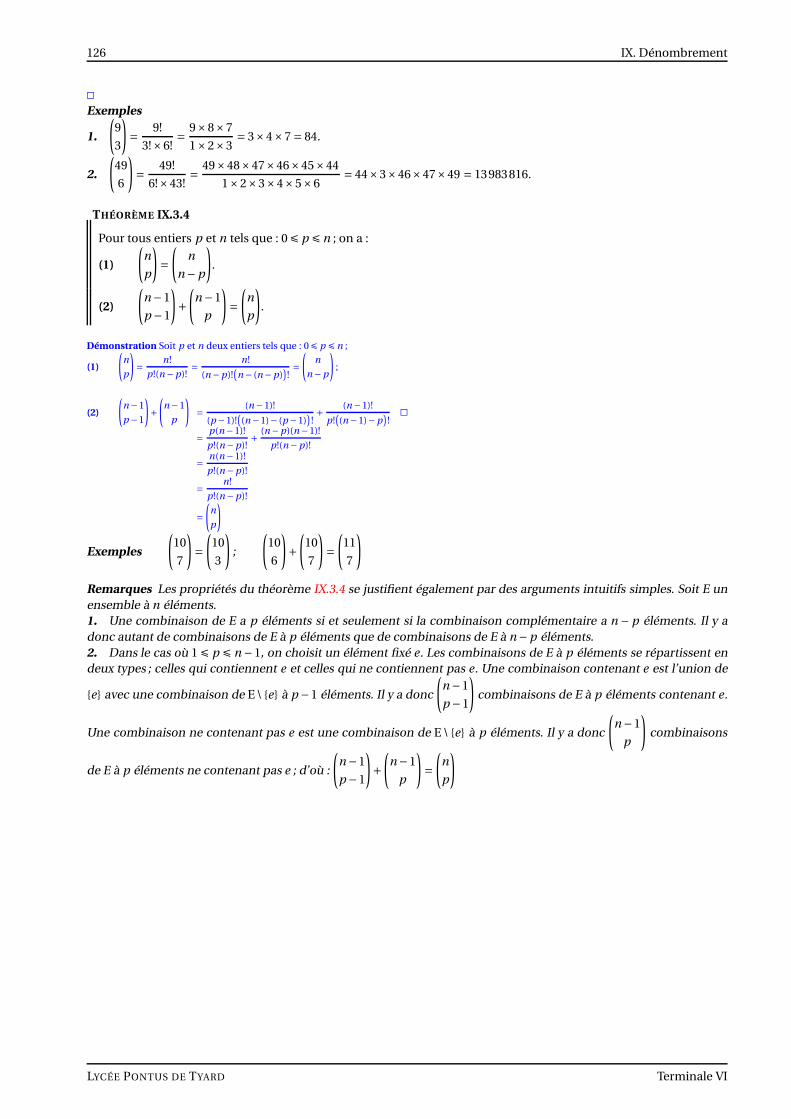
126 IX. Dénombrement
äExemples
1.
(
9
3
)
=9!
3!×6!=
9×8×7
1×2×3= 3×4×7 = 84.
2.
(
49
6
)
=49!
6!×43!=
49×48×47×46×45×44
1×2×3×4×5×6= 44×3×46×47×49 = 13983816.
THÉORÈME IX.3.4
Pour tous entiers p et n tels que : 0 É p É n ; on a :
(1)
(
n
p
)
=(
n
n−p
)
.
(2)
(
n−1
p −1
)
+(
n−1
p
)
=(
n
p
)
.
Démonstration Soit p et n deux entiers tels que : 0É p Én ;
(1)
(
n
p
)
=n!
p!(n −p)!=
n!
(n −p)!(
n − (n −p))
!=
(
n
n −p
)
;
(2)
(
n −1
p −1
)
+(
n −1
p
)
=(n −1)!
(p −1)!(
(n −1)− (p −1))
!+
(n −1)!
p!(
(n −1)−p)
!
=p(n −1)!
p!(n −p)!+
(n −p)(n −1)!
p!(n −p)!
=n(n −1)!
p!(n −p)!
=n!
p!(n −p)!
=(
n
p
)
ä
Exemples
(
10
7
)
=(
10
3
)
;
(
10
6
)
+(
10
7
)
=(
11
7
)
Remarques Les propriétés du théorème IX.3.4 se justifient également par des arguments intuitifs simples. Soit E unensemble à n éléments.1. Une combinaison de E a p éléments si et seulement si la combinaison complémentaire a n − p éléments. Il y adonc autant de combinaisons de E à p éléments que de combinaisons de E à n−p éléments.2. Dans le cas où 1 É p É n −1, on choisit un élément fixé e. Les combinaisons de E à p éléments se répartissent endeux types ; celles qui contiennent e et celles qui ne contiennent pas e. Une combinaison contenant e est l’union de
e avec une combinaison de E \ e à p −1 éléments. Il y a donc
(
n−1
p −1
)
combinaisons de E à p éléments contenant e.
Une combinaison ne contenant pas e est une combinaison de E \ e à p éléments. Il y a donc
(
n−1
p
)
combinaisons
de E à p éléments ne contenant pas e ; d’où :
(
n−1
p −1
)
+(
n−1
p
)
=(
n
p
)
LYCÉE PONTUS DE TYARD Terminale VI

IX.3. Tirage de p éléments dans un ensemble à n éléments 127
IX.3.3.b Triangle de Pascal
On sait que pour 0 < p < n, on a :
(
n−1
p −1
)
+(
n−1
p
)
=(
n
p
)
.
Ce résultat permet de calculer les nombres
(
n
p
)
de proche en proche, en for-
mant le triangle de Pascal 1 à l’aide du schéma suivant :(
n −1
p −1
)
+(
n −1
p
)
(
n
p
)
=
10
0
1
1
1
1
2
2
1
3
3
1
4
4
1
5
5
1 1
1 2 1
1 3 3 1
1 4 6 4 1
1 5 10 10 5 1
np
......
. . .
· · ·
IX.3.3.c Tirages simultanés
Choisir p éléments parmi les n éléments d’un ensemble E c’est se donner une combinaison de E à p éléments ; il
y a donc
(
n
p
)
façons de choisir p éléments parmi n.
Exercice IX.3.5. 25 individus doivent choisir trois d’entre eux pour les représenter.
De combien de façon peuvent-ils choisir leurs trois représentants ?
Solution Les choix possibles sont les combinaisons de trois individus parmi les 25 du groupe, il y a donc
(
25
3
)
choix
possibles ; c’est-à-dire : 2300.
IX.3.3.d La formule du binôme de NEWTON
THÉORÈME IX.3.5 FORMULE DU BINÔME DE NEWTON 2
Soit a et b deux nombres complexes non nuls et n un entier naturel (n , 0 si a + b = 0). On a :
(a +b)n =n∑
p=0
(
n
p
)
an−p bp .
Démonstration Raisonnons par récurrence sur n.
Pour n = 0, on a :n∑
p=0
(
n
p
)
an−p bp
(
0
0
)
a0b0 = 1 = (a +b)0 ;
L’égalité est donc vraie pour n = 0.
Pour n = 1, on a :n∑
p=0
(
n
p
)
an−p bp =(
1
0
)
a1b0 +(
1
1
)
a0b1 = a +b = (a +b)1 ;
L’égalité est donc vraie également pour n = 1.
Supposons l’égalité vraie pour un entier naturel non nul k, c’est-à-dire : (a +b)k =k∑
p=0Cp
k ak−p bp .
On a alors :
(a +b)k+1 = (a +b)(a +b)k
= (a +b)
(
C0k ak +C1
k ak−1 b+C2k ak−2b2 +···+Ck
k bk)
=(
C0k ak+1 +C1
k ak b+C2k ak−1b2 +···+Ck
k abk)
+(
C0k ak b+C1
k ak−1b2 +C2k ak−2 b3 +···+Ck
k bk+1)
=C0k ak+1 +
(
C0k +C1
k
)
ak b+···+(
Cp−1k +Cp
k
)
ak−p+1bp +···+(
Ck−1k +Ck
k
)
abk +Ck
k bk+1
=C0k+1 ak+1 +C1
k+1 ak b+··· +Cp
k+1 ak−p+1 bp +···+Ck
k+1 abk +Ck+1k+1 bk+1
=k+1∑
p=0Cp
k+1 ak+1−p bp
1. Blaise PASCAL (1623 - 1662), mathématicien, physicien et philosophe français.2. Isaac NEWTON (1642 - 1727), mathématicien, physicien et astronome anglais.
- série S

128 IX. Dénombrement
Ou encore : (a +b)k+1 = (a +b)(a +b)k
= (a +b)k∑
p=0Cp
k ak−p bp
= ak∑
p=0Cp
k ak−p bp +bk∑
p=0Cp
k ak−p bp
=k∑
p=0Cp
k ak−p+1 bp +k∑
p=0Cp
k ak−p bp+1
=k∑
p=0Cp
k ak−p+1 bp +k+1∑
p=1Cp−1
k ak−p+1bp
=C0k ak−0+1 b0 +
k∑
p=1
(
Cp
k ak−p+1 bp +Cp−1k ak−p+1bp
)
+Ck
k ak−(k+1)+1 bk+1
=C0k+1 ak+1−0 b0 +
k∑
p=1
(
Cp
k+1 ak−p+1 bp)
+Ck+1k+1 ak+1−(k+1)bk+1
=k+1∑
p=0Cp
k+1 ak+1−p bp
Donc, par récurrence, la formule du binôme de Newton est démontrée. äRemarques
1. Cette formule explique le nom de « coefficients binomiaux » donné aux nombres
(
n
p
)
.
2. La formule du binôme de Newton peut également être établie à partir de considérations plus intuitives. Fixons n,on a :
(a +b)n = (a +b)×·· ·× (a +b)︸ ︷︷ ︸
n facteurs
. (IX.1)
a+b est une somme de monômes de degré 1 en a et b donc (a+b)n est une somme de monômes de degré n en a et b ;c’est-à-dire de monômes de la forme : αp an−p bp ; en observant la formule (IX.1) on remarque que αp est le nombre defois où apparaît an−p bp dans le développement. Or les monômes an−p bp apparaissent lorsqu’on prend a dans n−p
facteurs et b dans les p facteurs restants. Par conséquent, il y a autant de monômes an−p bp dans le développement
qu’il y a de façons de choisir n−p facteurs parmi n ; c’est-à-dire :
(
n
n−p
)
; ou encore :
(
n
p
)
; donc : αp =(
n
p
)
; puis :
(a +b)n =n∑
p=0
(
n
p
)
an−p bp
Exemples
1. (2+ i )6 =(
6
0
)
26 +(
6
1
)
25i +
(
6
2
)
24i
2 +(
6
3
)
23i
3 +(
4
2
)
22i
4 +(
6
5
)
21i
5 +(
6
6
)
20i
6
= 1×64+6×32i +15×16× (−1)+20×8× (−i )+15×4×1+6×2× i +1×1× (−1)=−117+44i
2. (1+p
2)5 = 1+5p
2+10p
22 +10p
23 +5p
24 +p
25
= 1+5p
2+10×2+10×2p
2+5×4+4p
2= 41+29
p2
COROLLAIRE IX.3.6Soit E un ensemble à n éléments.Le nombre de parties de E est : 2n
DémonstrationPour tout entier p tel que : 0É p Én ; le nombre de parties de E à p éléments est :
(
n
p
)
. Donc :
cardP(E) =(
n
0
)
+(
n
1
)
+···+(
n
n −1
)
+(
n
n
)
=(
n
0
)
1n ×10 +(
n
1
)
11 ×1n−1 +···+(
n
n −1
)
1n−1 ×11 +(
n
n
)
10 ×1n = (1+1)n = 2n ä
Remarque On aurait pu obtenir cette propriété sans utiliser la formule du binôme du Newton. En effet, numérotonsles éléments de E de 1 à n. Considérons une partie A de E, à chaque numéro associons ∈ si l’élément correspondantappartient à A et ∉ sinon, on associe ainsi à A un n-uplet d’éléments de ∈,∉. En répétant le procédé pour toutes lesparties de A de E, on met en bijection l’ensemble des parties de E avec l’ensemble des n-uplets d’éléments de ∈,∉ ;d’où : cardP(E) = 2n .
LYCÉE PONTUS DE TYARD Terminale VI
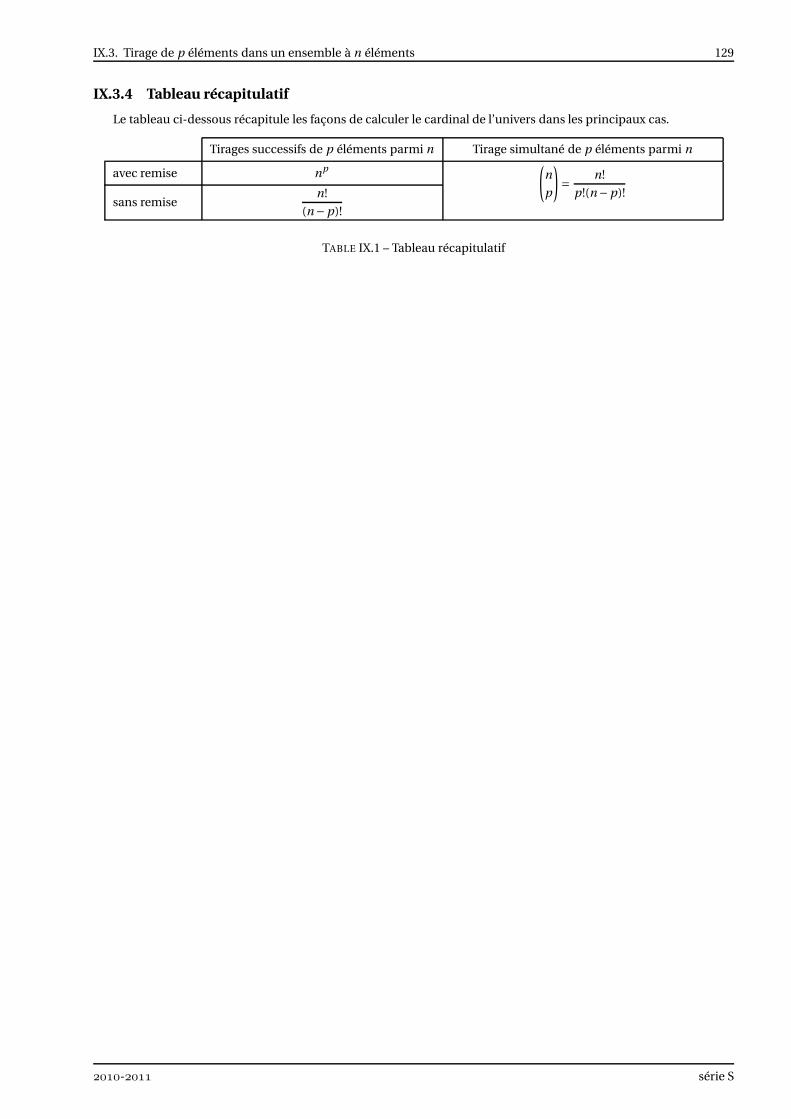
IX.3. Tirage de p éléments dans un ensemble à n éléments 129
IX.3.4 Tableau récapitulatif
Le tableau ci-dessous récapitule les façons de calculer le cardinal de l’univers dans les principaux cas.
Tirages successifs de p éléments parmi n Tirage simultané de p éléments parmi n
avec remise np(
n
p
)
=n!
p !(n−p)!sans remise
n!
(n−p)!
TABLE IX.1 – Tableau récapitulatif
- série S
130 IX. Dénombrement
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre X
Calcul des probabilités
X.1 Calculs de probabilités
X.1.1 Vocabulaire des événements
X.1.1.a Expérience aléatoire
– Lorsqu’on lance un dé, six résultats sont possibles : 1, 2, 3, 4, 5, 6.On dit qu’on a réalisé une expérience aléatoire (ou épreuve) comportant 6 éventualités ou issues et que l’univers
associé a cette expérience aléatoire est : Ω= 1;2;3;4;5; 6.– Le lancer de deux pièces de monnaies distinctes est une expérience aléatoire comportant 4 éventualités. L’uni-
vers associé à cette épreuve est : Ω= (P,P) ;(P, F) ;(F,P) ;(F,F).
Dans la première moitié de ce chapitre, les univers considérés sont des ensembles finis non vides.
X.1.1.b Événements liés à une expérience aléatoire
DÉFINITIONS X.1.1Soit Ω l’univers associé à une expérience aléatoire.(1) On appelle événement toute partie de Ω.(2) On appelle événement élémentaire tout singleton de Ω.
Exemples Dans le lancer d’un dé :1. « obtenir un nombre pair » est l’événement 2;4;6 ;2. « obtenir un nombre premier pair » est l’événement élémentaire 2.
Dans une épreuve, un événement est réalisé s’il contient le résultat de l’expérience. Par exemple, si on obtient « 4 »lors d’un lancer de dé, l’événement « obtenir un nombre pair » est réalisé.
Le tableau suivant indique la signification des diverses expressions utilisées dans le langage des événements.Vocabulaire des événements Signification ensembliste Notation
Univers Ensemble Ω Ω
Éventualité ou issue Élément de Ω ω (ω ∈Ω)Événement Partie de Ω A(A⊂Ω)
Événement élémentaire Singleton ω(ω ∈Ω)Événement certain Partie pleine Ω
Événement impossible Partie vide ∅
Événement « A ou B » Réunion des parties A et B A∪BÉvénement « A et B » Intersection des parties A et B A∩B
Événements A et B incompatibles Parties A et B disjointes A∩B=∅Événement contraire de A Complémentaire de A dans Ω A
Exemples Dans le lancer d’un dé, on considère les événements A : « obtenir un nombre pair » ;B : « obtenir un nombre premier » ; C : « obtenir 6 ».1. On a : A∪B= 2;3;4;5;6 ; A∪B est l’événement « obtenir un nombre pair ou premier ».2. On a : A∩B= 2 ; A∩B est l’événement « obtenir un nombre pair et premier ».3. Les événements B et C sont incompatibles.
131
132 X. Calcul des probabilités
4. On a : A = 1;3;5 ; A est l’événement : « obtenir un nombre impair ».
X.1.2 Probabilité d’un événement
X.1.2.a Introduction
On lance un dé bien équilibré ; l’univers associé à cette épreuve est : Ω= 1;2;3;4;5;6.La chance d’apparition est la même pour chaque face.
– L’événement 2 a une chance sur six d’être réalisé ; on dit que la probabilité de cet événement est1
6.
– L’événement 1;5 a deux chances sur six d’être réalisé, on dit que la probabilité de cet événement est1
3.
– « obtenir un nombre pair » est l’événement 2;4;6, dont la probabilité est1
2.
– L’événement certain a six chances sur six d’être réalisé ; sa probabilité est 1.– L’événement impossible n’a aucune chance d’être réalisé ; sa probabilité est 0.
DÉFINITION X.1.2Soit Ω l’univers associé à une expérience aléatoire.Une probabilité sur l’univers Ω est une application P deP(Ω) vers [0;1], qui à toute partie A de Ω associe le nombreréel P(A) appelé probabilité de l’événement A et qui vérifie les conditions suivantes :– la probabilité d’un événement est la somme des probabilités des événements élémentaires qui le constituent ;– la probabilité de l’événement certain est 1 ;– la probabilité de l’événement impossible est 0.
Remarques1. La probabilité de l’événement élémentaire ω est notée P(ω).2. Une probabilité P est parfaitement déterminée par la donnée desprobabilités des événements élémentaires.
ω ω1 · · · ωi · · · ωn
P(ω) p1 · · · pi · · · pn
Exemples On lance un dé pipé dont les faces sont numérotées de 1 à 6.La probabilité d’apparition d’un nombre pair est le double de la probabilité d’apparition d’un nombre impair et lesprobabilités d’apparition de deux nombres de même parité sont égales.1. Déterminer la probabilité d’apparition de chaque face du dé.L’univers est : Ω = 1;2;3;4;5; 6. Soit p la probabilité d’apparition d’un nombre pair et q celle d’un nombre impair.On a : p = 2q .Or : P(Ω) = 1 ; donc : 3p +3q = 1.
On en déduit que : q =1
9et p =
2
9.
Le tableau ci-contre donne la probabilité d’apparition de chaque facedu dé.
ω 1 2 3 4 5 6
P(ω)1
9
2
9
1
9
2
9
1
9
2
92. Quelle est la probabilité d’apparition d’un nombre inférieur ou égal à 4 ?La probabilité cherchée est celle de l’événement : A= 1;2;3;4.
On a : P(A)= P(1)+P(2)+P(3)+P(4) =2
3.
X.1.2.b Équiprobabilité
Lorsque les événements élémentaires d’une expérience ont la même probabilité, on dit qu’il y a équiprobabilité.Les situations d’équiprobabilité sont généralement suggérées par des expressions comme : « dé parfait », « dé nonpipé », « pièce parfaite » « boules indiscernables au toucher », « cartes bien battues », « on tire au hasard » etc.
THÉORÈME X.1.1Soit P une probabilité définie sur un univers Ω.
Dans l’hypothèse d’équiprobabilité, pour tout événement A, on a : P(A)=card(A)
card(Ω).
Démonstration Les événements élémentaires ont tous la même probabilité, soit p cette probabilité. On a : P(Ω) = 1 ; donc : p card(Ω) = 1 ; d’où :
p =1
card(Ω).
LYCÉE PONTUS DE TYARD Terminale VI

X.1. Calculs de probabilités 133
On en déduit que pour tout événement A, on a : P(A) = p card (A) =card(A)
card(Ω). ä
Remarque Les éventualités de A sont appelés cas favorables et celles de Ω, cas possibles.
On écrit souvent : P(A)=nombres de cas favorables
nombres de cas possibles.
Exercice X.1.1. On lance deux dés parfaits et on note la somme des nombres obtenus.
Quelle est la probabilité d’obtenir 10 ?
Solution L’univers Ω est l’ensemble des couples d’éléments de : 1;2;3;4;5;6.On a : card(Ω) = 62 = 36. « Obtenir 10 » est l’événement : (4;6),(5;5),(6;4).
On est dans une situation d’équiprobabilité (dés parfaits), donc la probabilité cherchée est :1
12.
Exercice X.1.2. On tire simultanément et au hasard 5 cartes dans un jeu de 32 cartes.
Quelle est la probabilité de tirer le roi de cœur ?
Solution L’univers Ω est l’ensemble des combinaisons de 5 cartes d’un jeu de 32, donc : card(Ω) =(
32
5
)
= 201376.
Les cartes sont tirées au hasard, on est donc dans une situation d’équiprobabilité.Soit A l’événement : « tirer le roi de cœur ». Réaliser A c’est choisir le roi de cœur puis tirer 4 cartes parmi les 31 cartes
restantes ; donc : card(A)=(
31
4
)
= 31465.
La probabilité cherchée est donc :card(A)
card(Ω)=
31465
201376=
5
32= 0,156 25.
X.1.2.c Propriétés
THÉORÈME X.1.2Soit P une probabilité définie sur un univers Ω, A et B deux événements. On a :(1) si A∩B=∅ alors : P(A∪B)= P(A)+P(B) ;(2) P(A)+P(A)= 1.
Démonstration
(1) Si l’un (au moins) des événements A ou B est impossible, alors la propriété est évidente. En effet si A =∅ alors : P(A∪B) = P(∅∪B) = P(B) et
P(A)+P(B) = P(∅)+P(B) = 0+P(B) = P(B).
Si les deux événements sont possibles, alors quitte à numéroter à nouveau les éventualités on peut supposer que : A = ω1 ; . . . ;ωp et B = ωp+1 ; . . . ;ωq.
On a alors : A∪B= ω1 ; . . . ;ωq ;
d’où : P(A)+P(B) =p∑
i=1P(ωi )+
q∑
i=p+1P(ωi ) =
q∑
i=1P(ωi )= P(A∪B).
(2) Pour B = A, on obtient : P(A)+P(A)= P(A∪ A) = P(Ω) = 1. ä
Remarque Plus généralement, par récurrence, on déduit de (1) que si A1, . . ., An sont des événements deux à deuxincompatibles, alors : P(A1)+·· ·+P(An) = P(A1 ∪·· ·∪An).
Ce qui peut également s’écrire : P
(n⋃
i=1Ai
)
=n∑
i=1P(Ai ).
On en déduit le théorème suivant.THÉORÈME X.1.3 THÉORÈME FAIBLE DES PROBABILITÉS TOTALES
Si
A1, . . . ,An
est une partition 1d’un événement A, alors :P(A)= P(A1)+·· ·+P(An).
A1
A2
A3
Ω
A
THÉORÈME X.1.4Soit P une probabilité définie sur un univers Ω et A, B deux événements.On a : P(A∪B)= P(A)+P(B)−P(A∩B).
Démonstration
- série S

134 X. Calcul des probabilités
Notons A’ le complémentaire de A∩B dans A et B’ le complémentaire de A∩B dans B.On a : A = (A∩B)∪A′ , avec (A∩B)∩A′ =∅ ;donc : P(A)= P(A∩B)+P(A′).On a : B = (A∩B)∪B′ , avec (A∩B)∩B′ =∅ ;donc : P(B) = P(A∩B)+P(B′ ).Tout élément de A∪B est soit élément de A mais pas de B, soit élément de B mais pasde A soit élément des deux.
A′,A∩B,B′ est donc une partition de A∪B. On en déduit
que : P(A∪B) = P(A′)+P(B′)+P(A∩B)P(A∪B) =
(P(A′)+P(A∩B)
)+
(P(B′)+P(A∩B)
)−P(A∩B)
P(A∪B) = P(A∩B)+P(A∪B)P(A∪B) = P(A)+P(B)−P(A∩B)
.
A∩BA’ B’
A B
Ω
ä
Exercice X.1.3. Une urne contient 15 boules, numérotées de 1 à 15. On tire au hasard une boule et on désigne par N son numéro. On désigne
respectivement par A et B les événements « N est pair » et « N est multiple de trois ».
1. Déterminer la probabilité des événements A, B et A∩B.
2. Calculer la probabilité des événements A, B et A∪B.
Solution 1. L’univers est : Ω= 1;2;3;4;5;6;7 ;8 ;9 ;10; 11;12; 13;14;15 ;La boule est tirée au hasard on a donc équiprobabilité.
Pour tout événement élémentaire ω, on a donc : P(ω) =1
15;
d’où : P(A) = P(2;4;6;8;10;12; 14) =7
15; P(B) = P(3;6;9;12;15) =
5
15=
1
3
et P(A∩B) = P(6;12) =2
15.
2. On a : P(A) = 1−P(A)=8
15; P(B) = 1−P(B) =
2
3;
et P(A∪B) = P(A)+P(B)−P(A∩B)=7
15+
1
3−
2
15=
2
3.
X.1.2.d Événements indépendants
DÉFINITION X.1.3Soit P une probabilité définie sur un univers Ω.Deux événements A et B sont indépendants lorsque : P(A∩B)= P(A)×P(B).
Dans le cas contraire, A et B sont dits dépendants.
Exemples1. Dans une classe de 36 élèves, on aimerait savoir si les élèves littéraires sont meilleurs en sport que les élèves nonlittéraires.
Un élève est déclaré littéraire lorsqu’il a obtenu lamoyenne en français, sportif lorsqu’il a obtenu lamoyenne en éducation physique et sportive. Le ta-bleau ci-joint récapitule les résultats de l’enquêtemenée dans cette classe.
Littéraires Non littéraires TotalSportifs 18 6 24
Non sportifs 9 3 12Total 27 9 36
TABLE X.1 – sportifs & littérairesOn choisit au hasard un élève et on considère les événements suivants.
S : « l’élève est sportif »L : « l’élève est littéraire »
On a : P(S) =2
3; P(L) =
3
4et P(S∩L) =
1
2; donc :
P(S∩L) = P(S)×P(L)
Les événements S et L sont indépendants.
Si on choisit un littéraire au hasard, la probabilité pour qu’il soit sportif est :18
27=
2
3.
Si on choisit un non littéraire au hasard, la probabilité pour qu’il soit sportif est encore :6
9=
2
3.
Dans cette classe, les littéraires ne sont ni plus ni moins sportifs que les non littéraires.2. Une classe comprend 15 filles et 21 garçons.
LYCÉE PONTUS DE TYARD Terminale VI

X.1. Calculs de probabilités 135
On demande des volontaires pour former une équipede football mixte, on obtient les résultats ci-contre. Onchoisit un (ou une) élève au hasard dans la classe et onconsidère les événements F : « l’élève est une fille » etV : « l’élève est volontaire » .
On a : P(F) =5
12; P(V) =
2
3et P(V∩F) =
2
9; donc :
Filles Garçons TotalVolontaires 8 16 24
Non volontaires 7 5 12Total 15 21 36
TABLE X.2 – Volontaires par genre
P(F∩V), P(F)×P(V)
Les événements F et V sont dépendants.
Si on choisit une fille au hasard, la probabilité pour qu’elle soit volontaire est :8
15.
Si on choisit un garçon au hasard, la probabilité pour qu’il soit volontaire est :16
21.
Plus généralement, on définit l’indépendance de n événements.DÉFINITION X.1.4Soit P une probabilité définie sur un univers Ω.n événements A1, . . . ,An sont indépendants lorsque pour tout sous-ensemble i1, . . . , ip de 1; . . . ;n, on a :
P
(p⋂
k=1Aik
)
=p∏
k=1P(Aik
).
Remarque Les considérations précédentes permettent de calculer la probabilité de A∩B lorsque A et B sont des évé-nements indépendants. Cette indépendance peut être signalée dans l’énoncé. Mais elle peut aussi découler des condi-tions de l’expérience ; ainsi, il y a indépendance entre les résultats :
– de tirages successifs avec remise ;– de jets successifs d’un dé, ou d’une pièce de monnaie.
Exercice X.1.4. On joue à pile ou face avec une pièce tordue où la probabilité d’obtenir face est1
3et celle d’obtenir pile
2
3. On lance neuf fois
cette pièce. On désigne par F1 l’événement « obtenir face au 1er lancer » puis F2 . . .
Quelle est la probabilité de l’événement (F1 et F2 et F9) ?
Solution Les événements F1, F2 et F9 sont indépendants donc :
P(F1 et F2 et F9) = P(F1)×P(F2)×P(F9) =(
1
3
)3
Exercice X.1.5. Un joueur de fléchettes dispose d’une cible carrée d’un mètre de côté. Il lance une fléchette, on suppose qu’il plante la
fléchette dans la cible, mais n’importe où dans la cible. Ainsi la probabilité que la fléchette se plante dans une région R est l’aire, en mètre carré
de cette région. Par abus de langage nous identifierons la région et l’événement correspondant. On considère les événements suivants. A ; B
; C ; D .
1. Démontrer que les événements A, B, C et D sont deux à deux indépendants.
2. Les événements A, B, C sont-ils indépendants ?
3. Les événements A, B, C, D sont-ils indépendants ?
Solution 1. Les aires des régions A, B, C, D représentent chacune la moitié de l’aire de la cible, donc :
P(A) = P(B) = P(C) = P(D) =1
2.
D’où :
P(A)×P(B) = P(A)×P(C)= P(A)×P(D)= P(B)×P(C) = P(B)×P(D)= P(C)×P(D)=1
4
Les intersections sont définies par : A∩B ; A∩C ; A∩D ; B∩C ; B∩D ; C∩D .Les aires de ces intersections représentent chacune le quart de l’aire de la cible aire ; donc :
P(A∩B) = P(A∩C)= P(A∩D)= P(B∩C) = P(B∩D) = P(C∩D) =1
4
Les événements A, B, C et D sont donc deux à deux indépendants.
2. On sait déjà que les événements A, B, C sont deux à deux indépendants, pour savoir s’ils sont indépendants il ne
reste plus qu’a comparer P(A)×P(B)×P(C) avec P(A∩B∩C). On a : P(A)×P(B)×P(C)=1
8.
A∩B∩C est la région : ; donc : P(A∩B∩C) =1
8.
- série S
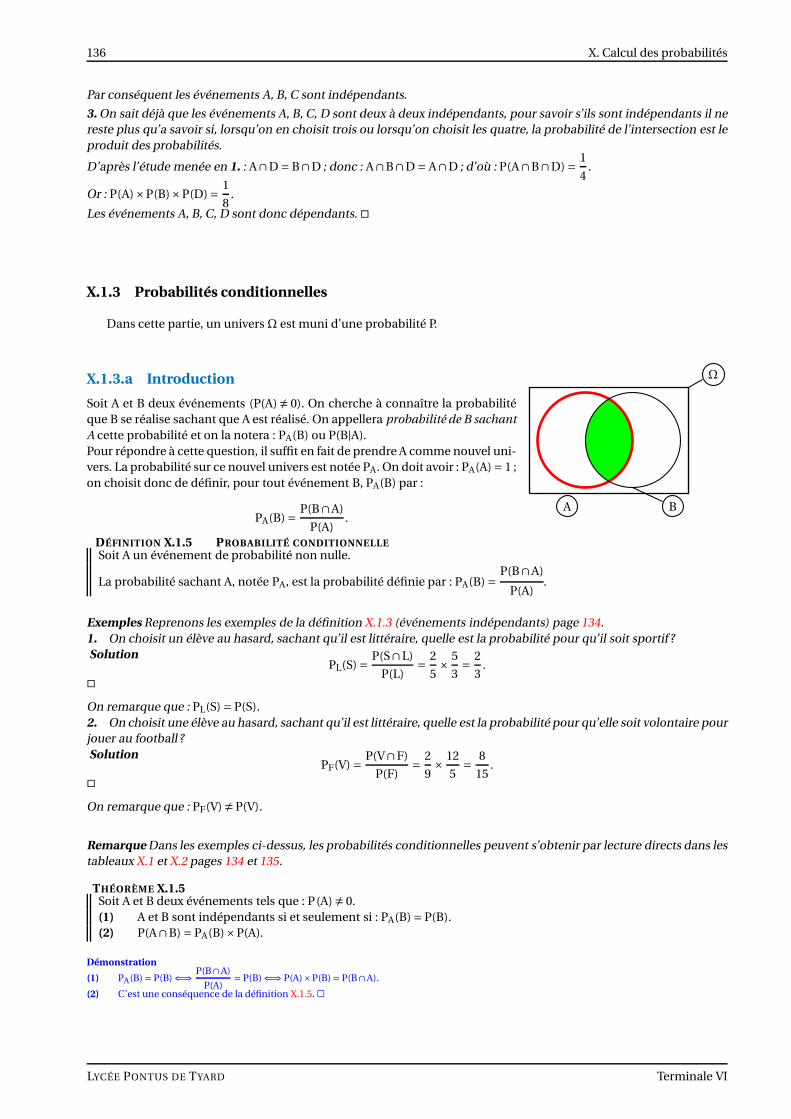
136 X. Calcul des probabilités
Par conséquent les événements A, B, C sont indépendants.
3. On sait déjà que les événements A, B, C, D sont deux à deux indépendants, pour savoir s’ils sont indépendants il nereste plus qu’a savoir si, lorsqu’on en choisit trois ou lorsqu’on choisit les quatre, la probabilité de l’intersection est leproduit des probabilités.
D’après l’étude menée en 1. : A∩D = B∩D ; donc : A∩B∩D = A∩D ; d’où : P(A∩B∩D) =1
4.
Or : P(A)×P(B)×P(D)=1
8.
Les événements A, B, C, D sont donc dépendants.
X.1.3 Probabilités conditionnelles
Dans cette partie, un univers Ω est muni d’une probabilité P.
X.1.3.a Introduction
Soit A et B deux événements (P(A), 0). On cherche à connaître la probabilitéque B se réalise sachant que A est réalisé. On appellera probabilité de B sachant
A cette probabilité et on la notera : PA(B) ou P(B|A).Pour répondre à cette question, il suffit en fait de prendre A comme nouvel uni-vers. La probabilité sur ce nouvel univers est notée PA. On doit avoir : PA(A)= 1 ;on choisit donc de définir, pour tout événement B, PA(B) par :
PA(B) =P(B∩A)
P(A).
A B
Ω
DÉFINITION X.1.5 PROBABILITÉ CONDITIONNELLESoit A un événement de probabilité non nulle.
La probabilité sachant A, notée PA, est la probabilité définie par : PA(B) =P(B∩A)
P(A).
Exemples Reprenons les exemples de la définition X.1.3 (événements indépendants) page 134.1. On choisit un élève au hasard, sachant qu’il est littéraire, quelle est la probabilité pour qu’il soit sportif ?Solution
PL(S) =P(S∩L)
P(L)=
2
5×
5
3=
2
3.
On remarque que : PL(S) = P(S).2. On choisit une élève au hasard, sachant qu’il est littéraire, quelle est la probabilité pour qu’elle soit volontaire pourjouer au football ?Solution
PF(V) =P(V∩F)
P(F)=
2
9×
12
5=
8
15.
On remarque que : PF(V),P(V).
Remarque Dans les exemples ci-dessus, les probabilités conditionnelles peuvent s’obtenir par lecture directs dans lestableaux X.1 et X.2 pages 134 et 135.
THÉORÈME X.1.5Soit A et B deux événements tels que : P(A), 0.(1) A et B sont indépendants si et seulement si : PA(B) = P(B).(2) P(A∩B) = PA(B)×P(A).
Démonstration
(1) PA(B) = P(B) ⇐⇒P(B∩A)
P(A)= P(B) ⇐⇒ P(A)×P(B) = P(B∩A).
(2) C’est une conséquence de la définition X.1.5. ä
LYCÉE PONTUS DE TYARD Terminale VI

X.1. Calculs de probabilités 137
X.1.3.b Arbres pondérés
Pour schématiser une situation et effectuer rapidement les calculs de-mandés, on représente souvent la situation étudiée par un arbre pon-
déré.L’arbre ci-contre représente le situation du tableau X.2 page 135.D’après ce tableau :
P(V) =2
3; PV(F) =
7
12; P(V∩F) =
1
3×
5
12=
5
36.
Déterminer la probabilité des événements : V∩F ; V∩F ; V∩F et V∩F.Combien vaut la somme des probabilités des événements : V∩F ;V∩F ; V∩F et V∩F.
V23
F13 V et F
F23
V et F
V13
F7
12 V et F
F512
V et F
Remarque Un arbre pondéré est une représentation intuitive permettant une utilisation simplifiée du théorème X.1.5.
X.1.3.c Théorème des probabilités totales
On se propose d’utiliser l’arbre pondéré ci-dessus pour déterminer P(F).V,V est une partition de l’univers Ω, donc V∩F,V∩F est une partition de F. En utilisant le théorème faible desprobabilités totales (théorème X.1.3 page 133) on en déduit que :
P(F) = P(V∩F)+P(V∩F)
or :
P(V∩F) = P(V)×PV(F) =2
3×
1
3=
8
36et P(V∩F) = P(V)×PV(F) =
1
3×
7
12=
7
36
donc :
P(F) =5
12.
Plus généralement, si
B1, . . . ,Bn
est une partition de l’universΩ, alors pour tout événement A :
B1 ∩A,. . . ,Bn ∩A
; est une partition de A et on a :
P(A)= P(B1 ∩A)+·· ·+P(Bn ∩A).
On en déduit le théorème suivant :THÉORÈME X.1.6 THÉORÈME DES PROBABILITÉS TOTALES
Si
B1, . . . ,Bn
est une partition de l’univers Ω telle que pour touti : P(Bi ), 0 ;alors pour tout événement A :
P(A)= P(B1)×PB1 (A)+·· ·+P(Bn)×PBn (A).
A
B1 B2
B3
B4
B5B6
B7 B8
Ω
X.1.3.d Exercice résolu
Exercice X.1.6. Un sac contient 5 billes blanches et 8 billes noires, indiscernables au touché. On tire successivement et sans remise trois
billes.
1. Décrire l’univers.
2. Déterminer la probabilité de chaque événement élémentaire.
3. Déterminer la probabilité d’obtenir une bille blanche au troisième tirage.
4. Déterminer la probabilité d’obtenir une bille blanche au deuxième tirage.
5. Déterminer la probabilité d’obtenir une bille noire au deuxième tirage et une bille blanche au troisième tirage.
6. Déterminer la probabilité d’avoir obtenu au deuxième tirage une bille noire, sachant que la bille obtenue au troisième tirage était blanche.
Solution 1. À chaque tirage on peut obtenir soit une bille blanche (B) soit une bille noire (N). L’univers est doncl’ensemble des 3-listes d’éléments B,N où, par exemple, (B,N,N) représente l’éventualité : « tirer d’abord une billeblanche puis deux billes noires ».
2. Désignons par B1 l’événement : « obtenir une bille blanche au 1er tirage » et définissons de même B2, B3, N1, N2 et
- série S
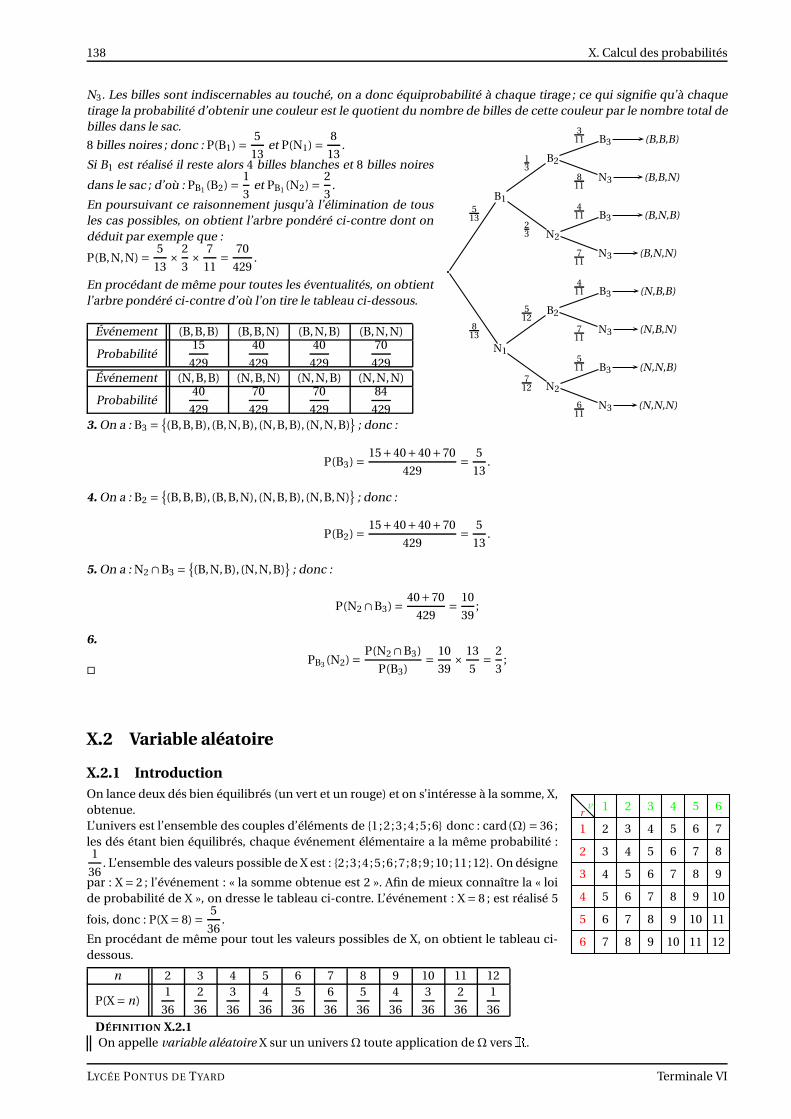
138 X. Calcul des probabilités
N3. Les billes sont indiscernables au touché, on a donc équiprobabilité à chaque tirage ; ce qui signifie qu’à chaquetirage la probabilité d’obtenir une couleur est le quotient du nombre de billes de cette couleur par le nombre total debilles dans le sac.
8 billes noires ; donc : P(B1) =5
13et P(N1) =
8
13.
Si B1 est réalisé il reste alors 4 billes blanches et 8 billes noires
dans le sac ; d’où : PB1 (B2) =1
3et PB1 (N2) =
2
3.
En poursuivant ce raisonnement jusqu’à l’élimination de tousles cas possibles, on obtient l’arbre pondéré ci-contre dont ondéduit par exemple que :
P(B,N,N) =5
13×
2
3×
7
11=
70
429.
En procédant de même pour toutes les éventualités, on obtientl’arbre pondéré ci-contre d’où l’on tire le tableau ci-dessous.
Événement (B,B,B) (B,B,N) (B,N,B) (B,N,N)
Probabilité15
429
40
429
40
429
70
429Événement (N,B,B) (N,B,N) (N,N,B) (N,N,N)
Probabilité40
429
70
429
70
429
84
429
B15
13
B213
B33
11 (B,B,B)
N3811
(B,B,N)
N223
B34
11 (B,N,B)
N3711
(B,N,N)
N1
813
B2512
B34
11 (N,B,B)
N3711
(N,B,N)
N27
12
B35
11 (N,N,B)
N3611
(N,N,N)
3. On a : B3 =
(B,B,B),(B,N,B),(N,B,B),(N,N,B)
; donc :
P(B3) =15+40+40+70
429=
5
13.
4. On a : B2 =
(B,B,B),(B,B,N),(N,B,B),(N,B,N)
; donc :
P(B2) =15+40+40+70
429=
5
13.
5. On a : N2 ∩B3 =
(B,N,B),(N,N,B)
; donc :
P(N2 ∩B3) =40+70
429=
10
39;
6.
PB3 (N2)=P(N2 ∩B3)
P(B3)=
10
39×
13
5=
2
3;
X.2 Variable aléatoire
X.2.1 IntroductionOn lance deux dés bien équilibrés (un vert et un rouge) et on s’intéresse à la somme, X,obtenue.L’univers est l’ensemble des couples d’éléments de 1;2;3;4;5;6 donc : card(Ω) = 36 ;les dés étant bien équilibrés, chaque événement élémentaire a la même probabilité :1
36. L’ensemble des valeurs possible de X est : 2;3;4;5;6;7;8; 9; 10;11; 12. On désigne
par : X = 2 ; l’événement : « la somme obtenue est 2 ». Afin de mieux connaître la « loide probabilité de X », on dresse le tableau ci-contre. L’événement : X = 8 ; est réalisé 5
fois, donc : P(X = 8) =5
36.
En procédant de même pour tout les valeurs possibles de X, on obtient le tableau ci-dessous.
1
1 2 3 4 5 6 7
2
2 3 4 5 6 7 8
3
3 4 5 6 7 8 9
4
4 5 6 7 8 9 10
5
5 6 7 8 9 10 11
6
6 7 8 9 10 11 12
rv
n 2 3 4 5 6 7 8 9 10 11 12
P(X = n)1
36
2
36
3
36
4
36
5
36
6
36
5
36
4
36
3
36
2
36
1
36DÉFINITION X.2.1On appelle variable aléatoire X sur un univers Ω toute application de Ω versR.
LYCÉE PONTUS DE TYARD Terminale VI
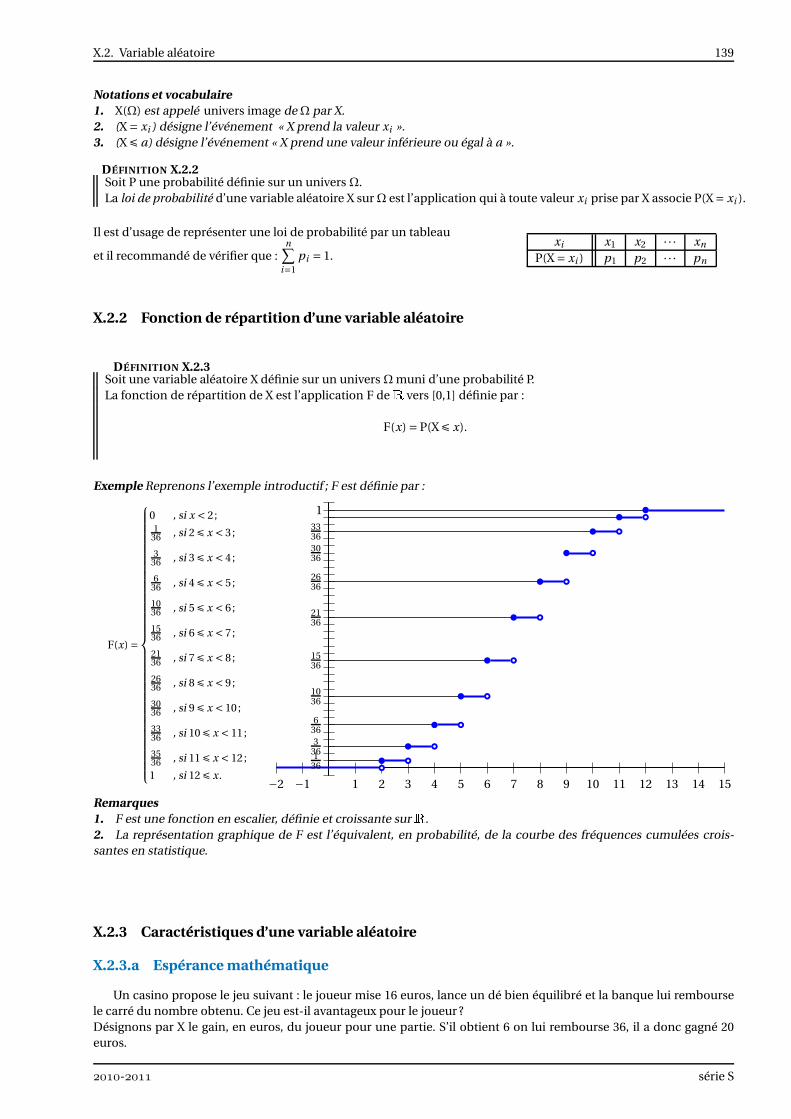
X.2. Variable aléatoire 139
Notations et vocabulaire1. X(Ω) est appelé univers image de Ω par X.2. (X = xi ) désigne l’événement « X prend la valeur xi ».3. (X É a) désigne l’événement « X prend une valeur inférieure ou égal à a ».
DÉFINITION X.2.2Soit P une probabilité définie sur un univers Ω.La loi de probabilité d’une variable aléatoire X sur Ω est l’application qui à toute valeur xi prise par X associe P(X= xi ).
Il est d’usage de représenter une loi de probabilité par un tableau
et il recommandé de vérifier que :n∑
i=1pi = 1.
xi x1 x2 · · · xn
P(X = xi ) p1 p2 · · · pn
X.2.2 Fonction de répartition d’une variable aléatoire
DÉFINITION X.2.3Soit une variable aléatoire X définie sur un univers Ω muni d’une probabilité P.La fonction de répartition de X est l’application F deR vers [0,1] définie par :
F(x) = P(XÉ x).
Exemple Reprenons l’exemple introductif ; F est définie par :
F(x) =
0 , si x < 2;1
36 , si 2 É x < 3;
336 , si 3 É x < 4;
636 , si 4 É x < 5;
1036 , si 5 É x < 6;
1536 , si 6 É x < 7;
2136 , si 7 É x < 8;
2636 , si 8 É x < 9;
3036 , si 9 É x < 10;
3336 , si 10 É x < 11;
3536 , si 11 É x < 12;
1 , si 12 É x.1 2 3 4 5 6 7 8 9 10 11 12 13 14 15−1−2
1
136
336
636
1036
1536
2136
2636
3036
3336
Remarques1. F est une fonction en escalier, définie et croissante surR.2. La représentation graphique de F est l’équivalent, en probabilité, de la courbe des fréquences cumulées crois-santes en statistique.
X.2.3 Caractéristiques d’une variable aléatoire
X.2.3.a Espérance mathématique
Un casino propose le jeu suivant : le joueur mise 16 euros, lance un dé bien équilibré et la banque lui remboursele carré du nombre obtenu. Ce jeu est-il avantageux pour le joueur ?Désignons par X le gain, en euros, du joueur pour une partie. S’il obtient 6 on lui rembourse 36, il a donc gagné 20euros.
- série S

140 X. Calcul des probabilités
L’univers est : Ω= 1;2;3;4;5, 6 ;l’univers image est donc :X(Ω) = −15;−12;−7;0;9;20.Le dé étant bien équilibré, on a équiprobabilité sur l’universet donc, ici, sur l’univers image ; on en déduit la loi de pro-babilité de X.
xi −15 −12 −7 0 9 20
P(X = xi )1
6
1
6
1
6
1
6
1
6
1
6
Sur un 600 parties un joueur réalisera en moyenne 100 fois chaque événement élémentaire. Le gain moyen par partiesera donc :
1
600
(
100× (−15)+100× (−12)+100× (−7)+100×0+100×9+100×20)
=−5
6
On peut donc espérer perdre en moyenne5
6€ par partie.
On remarque que :5
6=−15×
1
6−12×
1
6−7×
1
6+0×
1
6+9×
1
6+20×
1
6.
Plus généralement, on a la définition suivante.DÉFINITION X.2.4Soit X une variable aléatoire prenant les valeurs x1, . . . , xn avec les probabilités respectives p1, . . . , pn .On appelle espérance mathématique de X le nombre réel, noté E(X), défini par :
E(X) = x1p1 +·· ·+ xn pn =n∑
i=1xi pi .
Remarques1. L’espérance mathématique est l’équivalent, en probabilité, de la moyenne en statistique.2. L’espérance est donc une caractéristique de position.3. Pour une variable aléatoire constante ω 7→ λ, (x1 = ·· · = xn =λ) on a : E(λ) =λ.
4. Pour calculer l’espérance d’un variable aléatoire, il peut-être commode de reprendre la tableau de la loi de proba-bilité de la façon suivante.
xi x1 x2 · · · xn TotalP(X = xi ) p1 p2 · · · pn 1
xi pi x1p1 x2 · · · xn pn E(X)
Exercice X.2.1. Calculer l’espérance de la variable aléatoire de l’exemple introductif (§ X.2.1 page 138).
Solutionn 2 3 4 5 6 7 8 9 10 11 12 Total
P(X = n)1
36
2
36
3
36
4
36
5
36
6
36
5
36
4
36
3
36
2
36
1
361
nP(X= n)2
36
6
36
12
36
20
36
30
36
42
36
40
36
36
36
30
36
22
36
12
36E(X) = 7
L’espérance mathématique de X est donc : 7.
X.2.3.b Variance, écart type
La variance et l’écart type sont des nombres réels positifs qui traduisent la façon dont sontdispersées les valeurs d’une variable aléatoire autour de son espérance ; plus la variance etl’écart type seront grands plus les valeurs seront dispersées. Ce sont des caractéristiques dedispersions. Dans une classe un devoir a été donné dans deux matières, on choisit un élèveau hasard et on désigne par X sa note dans la première matière et par Y sa note dans laseconde matière. Les lois de probabilités des variables aléatoires X et Y sont données dansles tableaux ci-contre.
n 10P(X= n) 1
n 0 20
P(Y = n)1
2
1
2
Dans les deux cas l’espérance est 10 et pourtant les résultats de la classe dans les deux matières sont, en un certainsens, opposés : dans la première tous les élèves ont 10 et dans la seconde les notes sont réparties aux extrêmes.
DÉFINITIONS X.2.5Soit X une variable aléatoire.
(1) On appelle variance de X le nombre réel, noté V(X), défini par : V(X) = E((
X−E(X))2
)
.
(2) On appelle écart type de X le nombre réel, noté σ(X), défini par : σ(X)=√
V(X).
Remarques1. La variance est donc la moyenne des carrés des écarts à la moyenne.2. La variance étant une moyenne de carrés, on a introduit sa racine carrée pour mieux rendre compte de la disper-sion.
LYCÉE PONTUS DE TYARD Terminale VI
X.2. Variable aléatoire 141
3. La définition de la variance n’est pas très pratique pour les calculs.
X.2.3.c Propriétés de l’espérance et de la variance
THÉORÈME X.2.1Soit X et Y deux variables aléatoires définies sur un même univers Ω et λ un réel.(1) E(X+Y) = E(X)+E(Y) ;(2) E(X+λ) = E(X)+λ ;(3) E(λX) =λE(X) ;(4) E(X−E(X)) = 0 ;(5) V(X+λ) = V(X) ;(6) V(λX) =λ2V(X).
Démonstration Notons ωi (1 É i É n) les éventualités et pi les probabilités des événements élémentaires associés.
(1) On a : E(X) =n∑
i=1X(ωi )pi et E(Y) =
n∑
i=1Y(ωi )pi .
De même : E(X+Y)n∑
i=1(X+Y)(ωi )pi =
n∑
i=1
(
X(ωi )pi +Y(ωi )pi
)
=n∑
i=1X(ωi )pi +
n∑
i=1Y(ωi )pi =E(X)+E(Y).
(2) On déduit (2) de (1) en prenant pour Y la variable aléatoire constante ω 7→ λ.
(3) E(λX) =n∑
i=1λX(ωi )pi =λ
n∑
i=1X(ωi )pi =λE(X).
(4) D’après (2) (avec λ=−E(X)) : E(X−E(X)) =E(X)−E(X) = 0.
(5) V(X+λ) = E((
X+λ−E(X+λ))2)
= E((
X+λ−E(X)−λ)2)
= E((
X−E(X))2)
=V(X).
(6) V(λX) =E((
λX−E(λX))2)
=E((
λX−λE(X))2)
= E(
λ2(
X−E(X))2)
=λ2E((
X−E(X))2)
=λ2V(X). ä
Remarques1. En pratique toutes ces propriétés sont naturelles, afin de les illustrer prenons pour univers une classe où un devoira été donné ; la moyenne de la classe est 5 et la variance 3. On considère l’expérience aléatoire suivante : on choisit auhasard un élève et désigne par X sa note. X est une variable aléatoire et on a : E(X) = 5 et V(X)= 3.
Si on décide d’ajouter 1 point à chaque élève, alors la moyenne augmentera de 1 point :E(X+1) = E(X)+1 = 6.En revanche le fait d’ajouter 1 point à chaque élève ne changera pas la façon dont les notes sont réparties autour de lamoyenne, c’est-à-dire : V(X+1) = V(X).
Si on décide de multiplier par 2 la note de chaque élève, alors la moyenne sera multipliée par 2 elle aussi : E(2X) = 2E(X) = 10.De plus en multipliant par 2 les notes, on multiplie également par 2 les écarts à la moyenne et donc par 4 leur carré ;par conséquent : V(2X) = 4V(X).2. Pour donner un sens intuitif à la propriété (1) gardons l’exemple de la classe. Un devoir constitué d’un exercicesur 7 points et d’un problème sur 13 points à été donné. Cette fois-ci X désigne la note obtenue à l’exercice et Y la noteobtenue au problème. La note obtenue au devoir est alors X+Y. La moyenne de la classe au devoir est la somme desmoyennes de l’exercice et du problème : E(X+Y) = E(X)+E(Y).3. On déduit des deux dernières propriétés que : σ(X+λ)=σ(X) et σ(λX)= |λ|σ(X).4. On déduit des propriétés (1) et (3) que pour tous réels α, β ; on a : E(αX+βY) =αE(X)+βE(Y).On dit que l’espérance est linéaire.
D’après le théorème X.2.1 l’espérance de la somme de deux variables aléatoires est la somme des espérances. Il estdonc naturelle de se demander s’il n’en est pas de même pour le produit. Prenons un exemple.On dispose de deux rectangles, les dimensions de l’un sont 2 par 3 et celles de l’autre sont 4 par 5.On choisit un rectangle au hasard et on désigne par ℓ sa largeur et L son longueur. L’aire est donc la variable aléatoireLℓ.La moyenne des largeurs est : E(ℓ) = 3.La moyenne des longueurs est : E(L) = 4.Les aires sont 6 et 20 donc : E(Lℓ) = 13.On constate, ici, que : E(Lℓ),E(L)×E(ℓ).
Nous avons précédemment remarqué que la définition de la variance ne conduisait pas à un calcul aisé. le théo-rème suivant remédie à cette carence.
THÉORÈME X.2.2 FORMULE DE KÖNIG 2
Soit X une variable aléatoire. On a : V(X) = E(
X2)−E2(X).
2. KÖNIG, Johann Samuel (–)
- série S
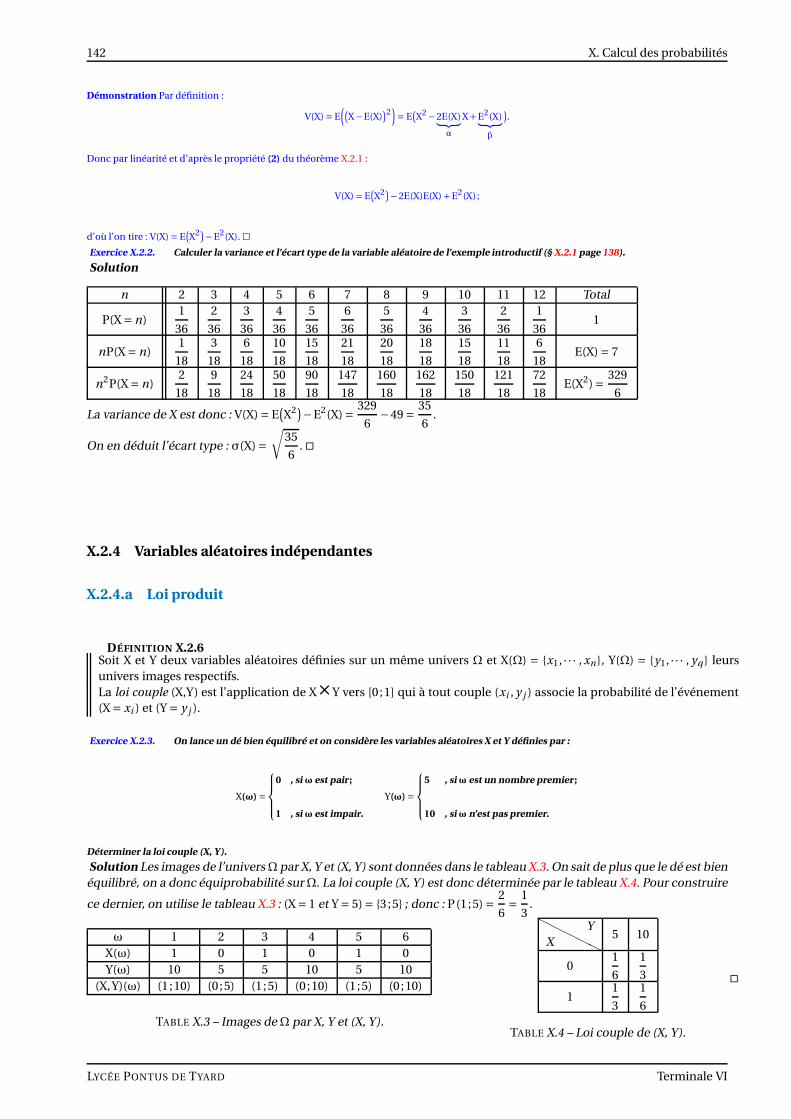
142 X. Calcul des probabilités
Démonstration Par définition :
V(X) =E((
X−E(X))2
)
= E(X2 −2E(X)
︸ ︷︷ ︸
α
X+E2(X)︸ ︷︷ ︸
β
).
Donc par linéarité et d’après le propriété (2) du théorème X.2.1 :
V(X) =E(X2)
−2E(X)E(X)+E2(X);
d’où l’on tire : V(X) = E(
X2)
−E2(X). äExercice X.2.2. Calculer la variance et l’écart type de la variable aléatoire de l’exemple introductif (§ X.2.1 page 138).
Solution
n 2 3 4 5 6 7 8 9 10 11 12 Total
P(X= n)1
36
2
36
3
36
4
36
5
36
6
36
5
36
4
36
3
36
2
36
1
361
nP(X = n)1
18
3
18
6
18
10
18
15
18
21
18
20
18
18
18
15
18
11
18
6
18E(X)= 7
n2P(X= n)2
18
9
18
24
18
50
18
90
18
147
18
160
18
162
18
150
18
121
18
72
18E(X2)=
329
6
La variance de X est donc : V(X) = E(
X2)−E2(X)=329
6−49 =
35
6.
On en déduit l’écart type : σ(X)=√
35
6.
X.2.4 Variables aléatoires indépendantes
X.2.4.a Loi produit
DÉFINITION X.2.6Soit X et Y deux variables aléatoires définies sur un même univers Ω et X(Ω) = x1, · · · , xn , Y(Ω) = y1, · · · , yq leursunivers images respectifs.La loi couple (X,Y) est l’application de X×Y vers [0;1] qui à tout couple (xi , y j ) associe la probabilité de l’événement(X = xi ) et (Y = y j ).
Exercice X.2.3. On lance un dé bien équilibré et on considère les variables aléatoires X et Y définies par :
X(ω) =
0 , si ω est pair ;
1 , si ω est impair.
Y(ω) =
5 , si ω est un nombre premier ;
10 , si ω n’est pas premier.
Déterminer la loi couple (X, Y).
Solution Les images de l’univers Ω par X, Y et (X, Y) sont données dans le tableau X.3. On sait de plus que le dé est bienéquilibré, on a donc équiprobabilité sur Ω. La loi couple (X, Y) est donc déterminée par le tableau X.4. Pour construire
ce dernier, on utilise le tableau X.3 : (X= 1 et Y = 5)= 3;5 ; donc : P(1;5) =2
6=
1
3.
ω 1 2 3 4 5 6X(ω) 1 0 1 0 1 0Y(ω) 10 5 5 10 5 10
(X,Y)(ω) (1;10) (0;5) (1;5) (0;10) (1;5) (0;10)
TABLE X.3 – Images de Ω par X, Y et (X, Y).
HHHHHXY
5 10
01
6
1
3
11
3
1
6
TABLE X.4 – Loi couple de (X, Y).
LYCÉE PONTUS DE TYARD Terminale VI
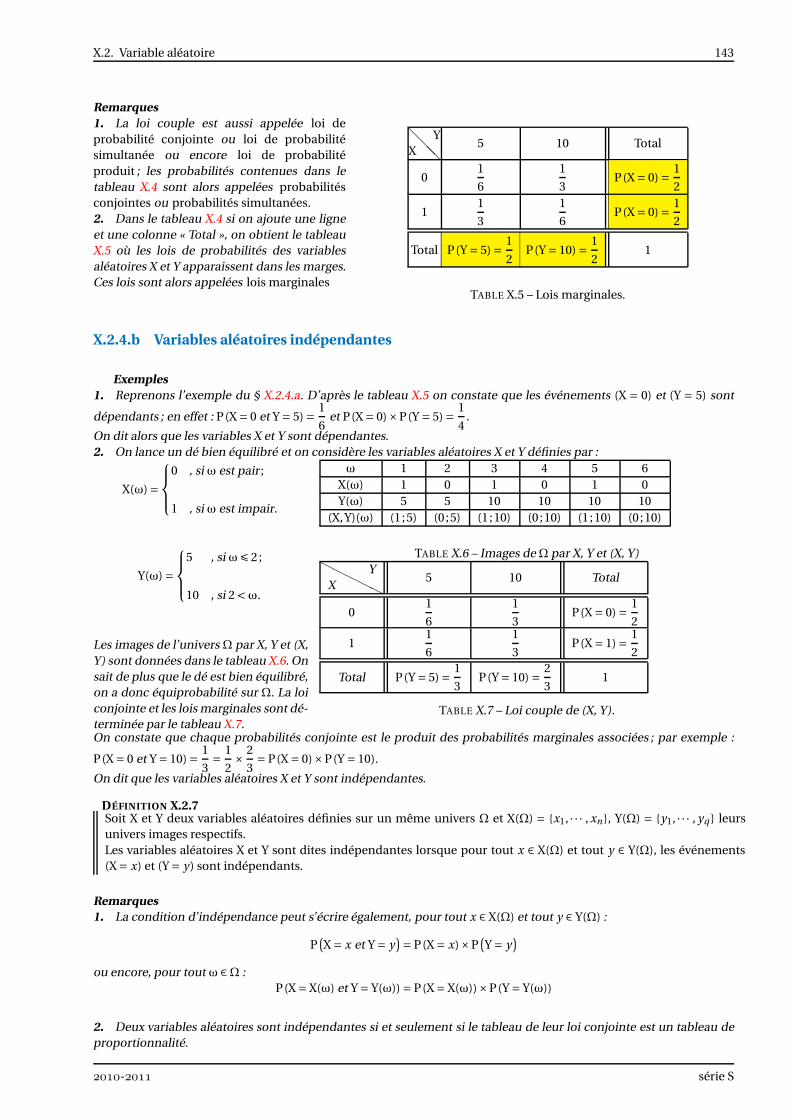
X.2. Variable aléatoire 143
Remarques1. La loi couple est aussi appelée loi deprobabilité conjointe ou loi de probabilitésimultanée ou encore loi de probabilitéproduit ; les probabilités contenues dans letableau X.4 sont alors appelées probabilitésconjointes ou probabilités simultanées.2. Dans le tableau X.4 si on ajoute une ligneet une colonne « Total », on obtient le tableauX.5 où les lois de probabilités des variablesaléatoires X et Y apparaissent dans les marges.Ces lois sont alors appelées lois marginales
@@@X
Y5 10 Total
01
6
1
3P(X = 0) =
1
2
11
3
1
6P(X = 0) =
1
2
Total P(Y = 5) =1
2P(Y = 10) =
1
21
TABLE X.5 – Lois marginales.
X.2.4.b Variables aléatoires indépendantes
Exemples1. Reprenons l’exemple du § X.2.4.a. D’après le tableau X.5 on constate que les événements (X = 0) et (Y = 5) sont
dépendants ; en effet : P(X = 0 et Y = 5) =1
6et P(X = 0)×P(Y = 5) =
1
4.
On dit alors que les variables X et Y sont dépendantes.2. On lance un dé bien équilibré et on considère les variables aléatoires X et Y définies par :
X(ω)=
0 , si ω est pair ;
1 , si ω est impair.
Y(ω) =
5 , si ωÉ 2;
10 , si 2<ω.
Les images de l’univers Ω par X, Y et (X,Y) sont données dans le tableau X.6. Onsait de plus que le dé est bien équilibré,on a donc équiprobabilité sur Ω. La loiconjointe et les lois marginales sont dé-terminée par le tableau X.7.
ω 1 2 3 4 5 6X(ω) 1 0 1 0 1 0Y(ω) 5 5 10 10 10 10
(X,Y)(ω) (1;5) (0;5) (1;10) (0;10) (1;10) (0;10)
TABLE X.6 – Images de Ω par X, Y et (X, Y)HHHHHX
Y5 10 Total
01
6
1
3P(X = 0) =
1
2
11
6
1
3P(X = 1) =
1
2
Total P(Y = 5) =1
3P(Y = 10) =
2
31
TABLE X.7 – Loi couple de (X, Y).
On constate que chaque probabilités conjointe est le produit des probabilités marginales associées ; par exemple :
P(X = 0 et Y = 10) =1
3=
1
2×
2
3= P(X = 0)×P(Y = 10).
On dit que les variables aléatoires X et Y sont indépendantes.
DÉFINITION X.2.7Soit X et Y deux variables aléatoires définies sur un même univers Ω et X(Ω) = x1, · · · , xn , Y(Ω) = y1, · · · , yq leursunivers images respectifs.Les variables aléatoires X et Y sont dites indépendantes lorsque pour tout x ∈ X(Ω) et tout y ∈ Y(Ω), les événements(X= x) et (Y= y) sont indépendants.
Remarques1. La condition d’indépendance peut s’écrire également, pour tout x ∈ X(Ω) et tout y ∈ Y(Ω) :
P(
X = x et Y = y)
= P(X= x)×P(
Y = y)
ou encore, pour tout ω ∈Ω :P(X = X(ω) et Y = Y(ω)) = P(X= X(ω))×P(Y = Y(ω))
2. Deux variables aléatoires sont indépendantes si et seulement si le tableau de leur loi conjointe est un tableau deproportionnalité.
- série S

144 X. Calcul des probabilités
THÉORÈME X.2.3Soit X et Y deux variables aléatoires indépendantes définies sur un même univers Ω et X(Ω) = x1, · · · , xn , Y(Ω) =y1, · · · , yq leurs univers images respectifs.(1) E(XY) = E(X)×E(Y).(2) V(X+Y) = V(X)+V(Y).
Démonstration Le formalisme utilisé dans cette démonstration n’est pas au programme de terminale, c’est démonstration peut donc être omise
en première lecture et est de toute façon réservée à des lecteurs motivés.
(1) E(X)×E(Y) =(
∑
x∈X(Ω)x P(X= x)
)
×E(Y)
=∑
x∈X(Ω)
(
x P(X = x)×E(Y))
=∑
x∈X(Ω)
[
x P(X = x)×∑
y∈Y(Ω)y P
(
Y = y)
]
=∑
x∈X(Ω)
[∑
y∈Y(Ω)
(x P(X= x)× y P
(Y= y
))
]
=∑
x∈X(Ω)y∈Y(Ω)
[x y P
(X = x et Y= y
)]
= E(XY)(2) (2) se déduit de (1) en utilisant la linéarité de l’espérance et la formule de König.
V(X+Y) =E((X+Y)2)
−(E(X+Y)
)2 (formule de König)
=E(
X2 +Y2 +2XY)
−(
E(X)+E(Y))2
=E(X2 +Y2 +2XY
)−
(E2(X)+E2(Y)+2E(X)E(Y)
)2
=E(X2)+E(Y2)+2E(XY)−E2 (X)−E2(Y)−2E(X)E(Y) (linéarité de l’espérance)=E(X2)−E2(X)+E(Y2 )−E2(Y) (d’après 1)=V(X)+V(Y) (formule de König)
ä
X.3 Lois de probabilités discrètes
X.3.1 Loi binomiale
X.3.1.a Schéma de Bernoulli
DÉFINITION X.3.1On appelle épreuve de Bernoulli une épreuve à deux issues possibles.
Exemple On lance un dé bien équilibré et on cherche à faire un 1. Désignont par S l’événement : « obtenir 1 » ; et par
S l’événement contraire. On a ici : P(S) =1
6et P
(
S)
=5
6.
Remarque Il est d’usage d’appeler succès l’issue recherchée et de la noter S.
DÉFINITION X.3.2On appelle expérience ou schéma de Bernoulli la répétition n fois, de façon indépendante, d’une épreuve de Bernoulli.
X.3.1.b Loi binomiale
DÉFINITION X.3.3On appelle loi binomiale de paramètres n et p la loi de probabilité de la variable aléatoire désignant le nombre desuccès dans un schéma de Bernoulli où l’épreuve de Bernoulli a été répétée n fois et où la p désigne la probabilité desuccès à une épreuve.
Notations et vocabulaire Cette loi de probabilité est notée : B(n, p).
Exemple Reprenons le jeu de dés où il faut faire un as. On lance quatre fois le dé et on et on désigne par X le nombre de
succès. la loi de probabilité de X est la loi binomiale de paramètres 4 et1
6. Déterminons la probabilité de l’événement
(X = 2).On a : (X = 2) =
(S,S, S, S), (S, S, S,S), (S, S,S, S), (S,S,S, S), (S,S, S,S), (S, S,S,S)
.Considérons les événements S1, S1, . . ., S4, S4 où, par exemple, S3 désigne l’événement : « obtenir un succès au troi-sième lancé ». On a alors :
(S,S, S, S)
= S1 ∩S2 ∩ S3 ∩ S4. Les résultats des différents lancés sont indépendants donc :
LYCÉE PONTUS DE TYARD Terminale VI
X.3. Lois de probabilités discrètes 145
P(
S,S, S, S)
= P(
S1 ∩S2 ∩ S3 ∩ S4)
= P(S1)×P(S2)×P(
S3)
×P(
S4)
=(
1
6
)2 (5
6
)2
=25
64
On démontre de même que les quatre événements élémentaires qui constituent l’événement (X = 2) ont tous pour
probabilité25
64; on déduit que : P(X = 2) = 4×
25
64=
25
324.
plus généralement, dans la loi binomiale B(n, p), la probabilité d’échec à une épreuve est : q = 1− p. Considéronsl’événement (X = k) où 0É k É n. pour réaliser un tel événement, il faut obtenir k succès et n−k échecs. On peut doncchoisir les k épreuves parmi n où on aura un succès et pour les n−k épreuves restantes on aura un échec. Il y a donc(
n
k
)
éventualités qui réalisent l’événement. De plus chaque événement élémentaire inclus dans l’événement (X= k) a
pour probabilité : pk qn−k ; on en déduit que : P(X = k) =(
n
k
)
pk qn−k .
THÉORÈME X.3.1Soit X une variable aléatoire dont la loi de probabilité est la loi binomiale de paramètres n et p.
(1) Pour tout entier k tel que : 0 É k É n ; on a :P(X = k) =(
n
k
)
pk qn−k .
(2) E(X) = np.(3) V(X) = npq .
Démonstration (1) La propriété (1) a été démontrée dans l’étude ci-dessus.(2) Calculons E(X). Par définition :
E(X) =n∑
k=0k
(
n
k
)
pk qn−k =n∑
k=0k
n!
k !(n −k)!pk qn−k .
On en déduit que :
E(X) =n∑
k=1k
n!
k !(n −k)!pk qn−k , car pour k = 0 le terme est nul
=n∑
k=1
n!
(k −1)!(n −k)!pk qn−k
= npn∑
k=1
(n −1)!
(k −1)!(n −1− (k −1)
)!pk−1 qn−1−(k−1) , posons : i = k −1
= npn−1∑
i=0
(n −1)!
i !((n −1)− i
)!pi q(n−1)−i
= np(p +q)n−1 , d’après la formule du binôme de Newton= np
(3) Calculons V(X). On a :
V(X) =E(X2)−E2(X) , par le formule de König=E(X2 −X)+E(X)−E2 (X) , par linéarité de l’espérance=E
(X(X−1)
)+np −n2 p2 , d’après (2)
On a de plus :
E(
X(X−1))
=n∑
k=0k(k −1)
n!
k !(n −k)!pk qn−k , par définition de B(n,p)
=n∑
k=2k(k −1)
n!
k !(n −k)!pk qn−k , car les deux premiers termes de la somme sont nuls.
=n∑
k=2
n!
(k −2)!(n −k)!pk qn−k
=n(n −1)p2n∑
k=2
(n −2)!
(k −2)!(
(n −2)− (k −2))
!pk−2 q(n−2)−(k−2) ,posons : i = k −2
= (n2 −n)p2n−2∑
i=0
(n −2)!
i !(
(n −2)− i)
!pi q(n−2)−i
= (n2 −n)p2 (p +q)n−2 , d’après la formule du binôme de Newton=n2p2 −np2
On en déduit que : V(X) =n2p2 −np2 +np −n2 p2 = np(1−p) = npq. ä
Remarque En utilisant la formule du binôme de Newton, on vérifie que la somme des probabilités de la loi binomialeest 1.
- série S

146 X. Calcul des probabilités
X.3.2 Loi de Poisson 3 (complément)
La loi de Poisson n’est pas au programme ; cette étude est donc réservée à des lecteurs motivés et permet de donnerplus de sens à la loi exponentielle.
X.3.2.a Calculs préliminairesExercice X.3.1. Soit λ un réel.
1. On se propose de démontrer que : limn→+∞
λn
n!= 0.
a. Soit n0 ∈N tel que : n0 > |λ|, vérifier que pour tout entier n > n0 :∣∣∣∣
λn
n!
∣∣∣∣É
∣∣∣∣
λn0
n0!
∣∣∣∣
(|λ|n0
)n (|λ|n0
)−n0.
(On pourra remarquer que :λn
n!=
λn0
n0!×
λ
n0 +1×
λ
n0 +2×·· · ×
λ
n)
b. Conclure.
2. Désormais λ est strictement positif. Pour tout entier n Ê 1, on considère l’intégrale :
In =1
n!
∫λ
0(λ− t )n et d t .
a. Calculer I1.(On pourra utiliser une intégration par parties.)
b. Démontrer que pour tout t ∈ [0;λ], on a :∣∣∣(λ− t )n et
∣∣∣É (λ− t )n eλ .
c. En déduire que :
|In | É eλλn+1
(n +1)!.
d. Déterminer la limite de la suite (In ).
3. Démontrer que pour tout entier n Ê 1 :
In = In+1 +λn+1
(n +1)!
4. On considère la suite (un )n∈N∗ définie par :
un = 1+λ+λ2
2!+
λ3
3!+···+
λn
n!.
a. Démontrer que la suite (un + In ) est constante.
b. Démontrer que
limn→+∞
(n∑
k=0
λk
k !
)
= eλ . (X.1)
X.3.2.b Introduction
1re situation
Dans un petit port de pêche, il y a vingt pêcheurs ; chaque pêcheur a un bateau. Une étude statistique a montréque chaque soir entre 17 heure et 20 heure il rentre au port, en moyenne, trois bateaux à l’heure.Quelle est la probabilité pour qu’entre 18 h 30 et 19 h 30 il rentre quatre bateaux au port ?
Pour modéliser la situation, on utilise un schéma de Bernoulli. On suppose que les heures de retour au port desdifférents bateaux sont indépendantes. On désigne par p la probabilité pour qu’un bateau donné rentre au port entre18 h 30 et 19 h 30. On désigne par X le nombre de bateaux qui rentrent port entre 18 h 30 et 19 h 30. La loi de probabilitéde X est donc la loi binomiale de paramètres 20 et p. L’espérance de X est alors 20p mais on sait que cette espérance
est trois. Par conséquent : p =3
20.
On en déduit que : P(X = 4) =(
20
4
)
p4(1−p)16 = 0,182 · · · .
2e situation
Dans un complexe portuaire, une étude statistique a montré que chaque matin entre 8 heure et 12 heure il entre,en moyenne, λ bateaux à l’heure.Quelle est la probabilité pour qu’entre 9 h 30 et 10 h 30 il entre k bateaux dans le complexe ?
3. POISSON, Siméon-Denis (–)
LYCÉE PONTUS DE TYARD Terminale VI

X.3. Lois de probabilités discrètes 147
Pour modéliser la situation, on utilise un schéma de Bernoulli. On désigne par n le nombre de bateaux à traversle monde qui pourraient un jour entré dans le complexe portuaire ; par p la probabilité pour que l’un donné d’entreeux entre dans le complexe entre 9 h 30 et 10 h 30 et par X le nombre de bateaux qui entrent dans le complexe entre9 h 30 et 10 h 30. On suppose que les heures d’entrée des n bateaux qui pourraient, un jour, entrer dans le port sontindépendantes. La loi de probabilité de X est donc la loi binomiale de paramètres n et p ; c’est-à-dire : Pn (X = k) =(
n
k
)
pk(1−p)n−k . L’espérance de X est alors np mais on sait que cette espérance est λ. Par conséquent : p =λ
n.
On en déduit que : Pn (X = k) =(
n
k
)(λ
n
)k (
1−λ
n
)n−k
.
Malheureusement, en pratique, on ne connaît pas n. On sait seulement qu’il est grand et que k est petit devantlui ; c’est la raison pour laquelle on décide de définir la nouvelle loi de probabilité, si cela a un sens : P(X = k) =
limn→+∞
Pn (X = k).
On a donc : Pn (X = k) =(
n
k
)(λ
n
)k (
1−λ
n
)n−k
=
k facteurs︷ ︸︸ ︷
n(n−1) · · · (n−k +1)
k!·λk
nk
(
1−λ
n
)n (
1−λ
n
)−k
=λk
k!×
n
n−1×·· ·×
n
n+k −1
(
1−λ
n
)n (
1−λ
n
)−k
Pour tous entiers n et j tels que : 0 É j < n, on a :n
n− j=
1
1− jn
; donc : limn→+∞
n
n− j= 1.
Par produit de k −1 facteurs, on en déduit que : limn→+∞
n
n−1×·· ·×
n
n+k −1= 1.
Par construction de la fonction exp, on sait que : limn→+∞
(
1−λ
n
)n
= e−λ ;
de plus : limn→+∞
(
1−λ
n
)
= 1 et limu→1
u−k = 1 ; donc par composition : limn→+∞
(
1−λ
n
)−k
= 1.
Donc par produit des limites :
P(X = k) = e−λλk
k!.
On doit maintenant vérifier que la somme des probabilités est égale à 1.
On a :n∑
k=0P(X = k) = e−λ
n∑
k=0
λk
k!.
Or, d’après (X.1) : limn→+∞
n∑
k=0
λk
k!= eλ ; donc par produit : lim
x→+∞
n∑
k=0P(X = k) = 1.
DÉFINITION X.3.4On dit qu’une loi de probabilité a pour loi de probabilité la loi de Poisson lorsque son univers image estN et que pourtout k ∈N, on a :
P(X = k) = e−λλk
k!.
Exemples1. Dans l’exemple du complexe portuaire, s’il arrive 53,8 bateaux à l’heure, la probabilité pour qu’il arrive 65 bateaux
entre 9 h 30 et 10 h 30 est : P(X = 65) = e−53,8 53,865
65!= 0,16 · · ·
Remarque La loi de poisson est généralement utilisée pour modéliser le comptage d’événements rares dans le temps,comme par exemple : le nombre de particules émises par une substance radioactive ou le nombre d’erreurs enregis-trées par un central téléphonique ; ou dans l’espace, comme par exemple : le nombre de bactéries dans une prépara-tion microscopique.
- série S

148 X. Calcul des probabilités
X.3.2.c Espérance et Variance
D’après la construction utilisée il semblerait cohérent que, dans la loi de Poisson, l’espérance soit λ.THÉORÈME X.3.2
Soit X une variable aléatoire dont la loi de probabilité est la loi de Poisson de paramètre λ.(1) E(X) =λ.(2) V(X) =λ.
Démonstration
(1) Par définition l’espérance de X est la limite de :n∑
k=0k e−λ
λk
k !lorsque n tend vers +∞.
On a :n∑
k=0k e−λ
λk
k != e−λ
n∑
k=1kλk
k != e−λλ
n∑
k=1
λk−1
(k −1)!= e−λλ
n−1∑
j=0
λ j
j !.
On sait que : limn→+∞
n−1∑
j=0
λ j
j != eλ ; donc : lim
n→+∞
n∑
k=0k e−λ
λk
k !=λ. Donc : E(X) =λ.
(2) Par définition la variance de X est la limite de :n∑
k=0(k −λ)2 e−λ
λk
k !lorsque n tend vers +∞.
De plus :n∑
k=0(k −λ)2 e−λ
λk
k !=
(n∑
k=0k2 e−λ
λk
k !
)
−2λ
(n∑
k=0k e−λ
λk
k !
)
+λ2 e−λ(
n∑
k=0
λk
k !
)
.
D’après les calculs précédents, on a par produit et par somme : limn→+∞
[
−2λ
(n∑
k=0k e−λ
λk
k !
)
+λ2 e−λ(
n∑
k=0
λk
k !
)]
=−2λ2 +λ2 =−λ2.
On a :n∑
k=0k2 e−λ
λk
k !=
n∑
k=0(k2 −k)e−λ
λk
k !+
n∑
k=0k e−λ
λk
k !
= e−λn∑
k=2k(k −1)
λk
k !+
n∑
k=0k e−λ
λk
k !
= e−λλ2n∑
k=2
λk−2
(k −2)!+
n∑
k=0k e−λ
λk
k !
= e−λλ2n−2∑
j=0
λ j
j !+
n∑
k=0k e−λ
λk
k !
On sait que : limn→+∞
n−1∑
j=0
λ j
j != eλ et lim
n→+∞
n∑
k=0k e−λ
λk
k != λ ; donc : lim
n→+∞
n∑
k=0k2 e−λ
λk
k !=λ2 +λ. Donc : V(X) =λ.ä
X.4 Lois de probabilités continues
X.4.1 Intégrales généralisées
X.4.1.a Activité
Exercice X.4.1. On considère la fonction, f : x 7−→2
x2 −1, définie sur ]1;+∞[ et la fonction F : x 7−→
∫x
2f (t ) d t .
1. Quel est l’ensemble de définition de F ? Que représente F pour f ?
2. Déterminer deux réels a et b tels que pour tout x > 1 : f (x) =a
x −1+
b
x +1.
3. Calculer F(x) en fonction de x .
4. Étudier la limite de F en +∞.
X.4.1.b Définition
Habituellement, lorsqu’on calcul,∫b
af (t) d t , a et b sont des nombres réels et f est une fonction continue sur
[a ;b]. On se propose d’étendre, par passage à la limite, la définition de l’intégrale au cas (lorsque cela est possible) oùl’une au moins des bornes est infinie ou la limite en l’une au moins des bornes est infinie. De telles intégrales sontdites impropres.
DÉFINITION X.4.1Soit f une fonction dont l’ensemble de définition contient un intervalle [a ;+∞[ (avec a ∈R). Si f est continue sur[a ;+∞[ (sauf peut-être en nombre finis de réels où elle admet une limite à droite et une limite à gauche) et si la
fonction : x 7→∫x
af (x) d x ; admet une limite finie, ℓ, en +∞ ; alors on écrit :
∫+∞
af (x) d x = ℓ.
Remarques1. Lorsque l’intégrale a une limite finie, elle est dite convergente.
LYCÉE PONTUS DE TYARD Terminale VI

X.4. Lois de probabilités continues 149
2. Lorsque l’intégrale n’a pas de limite ou que sa limite est infinie, elle est dite divergente.
3. On définit de même, lorsqu’elle existe,∫a
−∞f (x) d x.
Exercice X.4.2. Démontrer que∫+∞
−∞|t |e−t 2
d t est définie et calculer sa valeur.
Solution La fonction f : x 7−→ |t |e−t 2est continue surR (elle est donc intégrable sur tout intervalle fermé deR), paire
et positive surR. Considérons la fonction F définie surR par :
F(x) =∫x
0|t |e−t 2
d t .
La fonction f est paire, donc pour tout x ∈R :
F(−x) =∫−x
0|t |e−t 2
d t =∫0
x|t |e−t 2
d t =−∫x
0|t |e−t 2
d t =−F(x).
La Fonction F est impaire.Pour x > 0, les éléments de [0; x] sont positif, et on a alors :
F(x) =∫x
0|t |e−t 2
d t =∫x
0t e−t 2
d t =−1
2
∫x
0−2t e−t 2
d t =−1
2
[
e−t 2]x
0=
1−e−x2
2
On a : limx→+∞
= e−x2= 0 ; donc : lim
x→+∞= F(x) =
1
2.
∫+∞
0|t |e−t 2
d t =1
2.
La fonction F est impaire, donc : limx→−∞
= F(x) =−1
2; c’est-à-dire :
∫−∞
0|t |e−t 2
d t =−1
2; d’où il vient :
∫0
−∞|t |e−t 2
d t =1
2.
Par somme : ∫+∞
−∞|t |e−t 2
d t = 1.
X.4.2 Généralités sur lois de probabilités continues
X.4.2.a Densité de probabilité
DÉFINITION X.4.2Une densité de probabilité sur un intervalle I est une fonction f continue sur I (sauf peut-être en nombre fini d’élé-
ments où elle admet une limite à droite et une limite à gauche), positive sur I et telle que :∫
If (t)dt = 1.
Exemples
1. D’après l’étude menée en activité à l’exercice X.4.1., la fonction f : x 7−→2
(ln3)(x2 −1)est continue et positive sur
[2;+∞[, de plus :∫+∞
2f (t)dt =
1
ln3
∫+∞
2
2dt
t 2 −1= 1 ; donc f est une densité de probabilité sur [2;+∞[.
2. D’après l’étude menée à l’exercice X.4.2., la fonction g : x 7−→ |t |e−t 2est continue et positive sur R, de plus :
∫+∞
−∞f (t)dt = 1 ; donc g est une densité de probabilité surR.
X.4.2.b Loi de probabilité continue
DÉFINITION X.4.3Soit f une densité de probabilité sur un intervalle I. La loi de probabilité associée à f est la loi définie pour tout
intervalle, J, inclus dans I par : P(X ∈ J) =∫
Jf (t)dt .
- série S

150 X. Calcul des probabilités
Remarque Si X est une variable aléatoire dont la loi de probabilité est la loi associée à la densité de probabilité f alorsl’univers image de X est I.
Exemple Considérons la densité de probabilité surR, g : t 7−→ |t |e−t 2. Si une variable aléatoire X a pour loi de proba-
bilité la loi associée à g , alors :
P(1 É X É 2) =∫2
1|t |e−t 2
d t =e−1−e−4
2
0.5
0 1 2 3 4−1−2−3−4−5x
y
P(1 É X É 2)Cg
FIGURE X.1 – Représentation graphique de la densité de probabilité g
Exercice X.4.3. Soit X une variable aléatoire dont la loi de probabilité est la loi associée à la densité de probabilité f : x 7−→2
(ln3)(x2 −1)sur
[2+∞[.
Calculer la probabilité de l’événement 3 ÉXÉ 4.
Solution On a : P(3 É X É 4) =∫4
3
2dt
(ln3)(t 2 −1)=
1
ln 3
[
ln
(t −1
t +1
)]4
3=
ln 35 − ln 2
4
ln 3= 1+
ln 25
ln 3
X.4.2.c Espérance et variance d’une loi de probabilité continue
L’étude menée dans ce paragraphe n’est pas au programme mais peut aider de bons élèves à mieux comprendreles théorèmes. . .Dans le cas d’une variable aléatoire discrète dont la loi de probabilité est donnéepar le tableau ci-contre.
xi x1 x2 · · · xn
P(X = xi ) p1 p2 · · · pn
On sait que :
E (X) =n∑
i=1xi pi et V(X) = E
(
X2)−E2(X).
Lorsque cela est possible, on étend au cas d’une variable aléatoire continue de densité de probabilité, f , définie surun intervalle, I, ces définition par :
E(X) =∫
It f (t) d t et V(X) = E
(
X2)
−E2(X).
Remarques1. Si l’intégrale définissant l’espérance est divergente, alors l’espérance n’est pas définie.2. Si l’intégrale définissant la variance est divergente, alors la variance n’est pas définie.3. Si l’espérance de X n’est pas définie, alors la variance de X n’est pas définie non plus.
Exercice X.4.4. Soit X une variable aléatoire dont la loi de probabilité est la loi associée à la densité de probabilité f : x 7−→2
(ln3)(x2 −1)sur
[2+∞[. L’espérance et la variance de X sont-elles définies ?
Solution Pour x > 2, on a :∫x
2t f (t) d t =
1
ln3
∫x
2
2tdt
t 2 −1=
1
ln 3
[
ln(
t 2 −1)]x
2 .
Donc : limx→+∞
∫x
2t f (t) d t =+∞.
Ni l’espérance ni la variance de X ne sont définies.
Exercice X.4.5. Soit X une variable aléatoire dont la loi de probabilité est la loi associée à la densité de probabilité g : t 7−→ |t |e−t 2.
Déterminer l’espérance et la variance de X (on pourra utiliser wxMaxima ).
Solution La fonction g est définie surR, qui est symétrique par rapport à 0. De plus, pour tout nombre réel t : g (−t)=|−t |e−(−t )2
) = |t |e−t 2= g (t). La fonction g est donc paire et la fonction, t 7−→ t g (t), est impaire comme produit d’une
fonction impaire par une fonction paire. On en déduit que l’intégrale,∫∞
−∞t g (t) d t , est nulle si elle est convergente.
Maxima 5.16.3 http://maxima.sourceforge.net
Using Lisp CLISP 2.44.1 (2008-02-23)
Distributed under the GNU Public License. See the file COPYING.
Dedicated to the memory of William Schelter.
The function bug_report() provides bug reporting information.
LYCÉE PONTUS DE TYARD Terminale VI
X.5. Adéquation à la loi équirépartie 151
(%i1) g(t):=abs(t)*exp(-tˆ2);
(%o1) g(t) := |t | exp(
−t 2)
(%i2) assume(x>0);
(%o2) [x > 0](%i3) integrate(t*g(t),t,0,x);
(%o3)e−x2
(pπex2
erf(x)−2 x)
4(%i4) limit(%,x,inf);
(%o4)
pπ
4Donc l’intégrale est convergente et l’espérance est nulle.
Si la variance est définie, on a : V(X) = E(
X2)−E2(X)= E(
X2)=∫∞
−∞t 2g (t) d t = 2
∫∞
0t 2g (t) d t , par parité.
(%i5) integrate(tˆ2*g(t),t,0,x);
(%o5)1
2−
(
x2 +1)
e−x2
2(%i6) limit(%,x,inf);
(%o6)1
2La variance de X est donc définie et vaut 1.
X.4.3 Loi uniforme
Soit a et b deux nombres réels tels que a < b. La loi uniforme sur [a ;b] est la loi dont la densité est constante sur[a ;b] et nulle à l’extérieur de cet intervalle. Désignons par k la valeur de cette constante. On a :
1 =∫
[a ;b]k d t = k(b −a).
On en déduit que : k =1
b −a.
DÉFINITION X.4.4Soit a et b deux nombres réels tels que a < b.
La loi uniforme sur [a ;b] est la loi dont la densité de probabilité, f , est définie par : f (x) =
1
b −asi x ∈ [a ;b]
0 si x ∈R\ [a ;b]
X.4.4 Loi exponentielle
X.5 Adéquation à la loi équirépartie
On lance un dé usuel 100 fois. On obtient les résultats suivants :
chiffres 1 2 3 4 5 6effectifs 20 17 12 19 11 21
On aimerait savoir en quel sens on peut considérer ce dé équilibré ou non. Le test à mettre en place ne doit pas êtredestructeur, il est donc forcément un test statistique. Il ne pourra donc pas être fiable à cent pour cent ; en effet, mêmeavec un dé parfaitement équilibré la probabilité d’obtenir 100 fois le chiffre 1, bien qu’infime, n’est pas nulle. Ainsirejeter un dé, c’est prendre le risque de rejeter un dé équilibré et accepter un dé, c’est prendre le risque d’accepter undé déséquilibré. Examinons le tableau des fréquences.
chiffres 1 2 3 4 5 6fréquences 20% 17% 12% 19% 11% 21%
On constate qu’il y a un écart certain avec le tableau des fréquences idéal.
chiffres 1 2 3 4 5 6
fréquences1
6
1
6
1
6
1
6
1
6
1
6
- série S
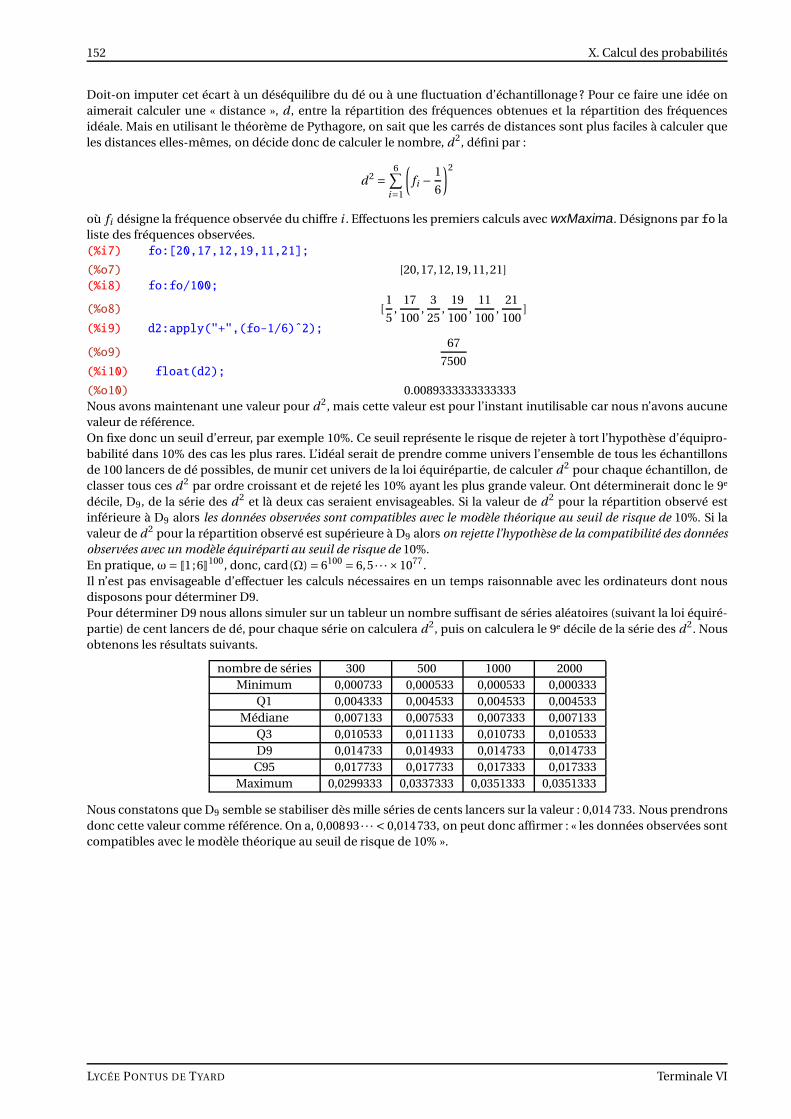
152 X. Calcul des probabilités
Doit-on imputer cet écart à un déséquilibre du dé ou à une fluctuation d’échantillonage ? Pour ce faire une idée onaimerait calculer une « distance », d , entre la répartition des fréquences obtenues et la répartition des fréquencesidéale. Mais en utilisant le théorème de Pythagore, on sait que les carrés de distances sont plus faciles à calculer queles distances elles-mêmes, on décide donc de calculer le nombre, d2, défini par :
d2 =6∑
i=1
(
fi −1
6
)2
où fi désigne la fréquence observée du chiffre i . Effectuons les premiers calculs avec wxMaxima. Désignons par fo laliste des fréquences observées.(%i7) fo:[20,17,12,19,11,21];
(%o7) [20,17,12,19,11,21](%i8) fo:fo/100;
(%o8) [1
5,
17
100,
3
25,
19
100,
11
100,
21
100]
(%i9) d2:apply("+",(fo-1/6)ˆ2);
(%o9)67
7500(%i10) float(d2);
(%o10) 0.0089333333333333Nous avons maintenant une valeur pour d2, mais cette valeur est pour l’instant inutilisable car nous n’avons aucunevaleur de référence.On fixe donc un seuil d’erreur, par exemple 10%. Ce seuil représente le risque de rejeter à tort l’hypothèse d’équipro-babilité dans 10% des cas les plus rares. L’idéal serait de prendre comme univers l’ensemble de tous les échantillonsde 100 lancers de dé possibles, de munir cet univers de la loi équirépartie, de calculer d2 pour chaque échantillon, declasser tous ces d2 par ordre croissant et de rejeté les 10% ayant les plus grande valeur. Ont déterminerait donc le 9e
décile, D9, de la série des d2 et là deux cas seraient envisageables. Si la valeur de d2 pour la répartition observé estinférieure à D9 alors les données observées sont compatibles avec le modèle théorique au seuil de risque de 10%. Si lavaleur de d2 pour la répartition observé est supérieure à D9 alors on rejette l’hypothèse de la compatibilité des données
observées avec un modèle équiréparti au seuil de risque de 10%.En pratique, ω= 1;6100, donc, card(Ω) = 6100 = 6,5 · · · ×1077.Il n’est pas envisageable d’effectuer les calculs nécessaires en un temps raisonnable avec les ordinateurs dont nousdisposons pour déterminer D9.Pour déterminer D9 nous allons simuler sur un tableur un nombre suffisant de séries aléatoires (suivant la loi équiré-partie) de cent lancers de dé, pour chaque série on calculera d2, puis on calculera le 9e décile de la série des d2. Nousobtenons les résultats suivants.
nombre de séries 300 500 1000 2000Minimum 0,000733 0,000533 0,000533 0,000333
Q1 0,004333 0,004533 0,004533 0,004533Médiane 0,007133 0,007533 0,007333 0,007133
Q3 0,010533 0,011133 0,010733 0,010533D9 0,014733 0,014933 0,014733 0,014733C95 0,017733 0,017733 0,017333 0,017333
Maximum 0,0299333 0,0337333 0,0351333 0,0351333
Nous constatons que D9 semble se stabiliser dès mille séries de cents lancers sur la valeur : 0,014 733. Nous prendronsdonc cette valeur comme référence. On a, 0,00893 · · · < 0,014733, on peut donc affirmer : « les données observées sontcompatibles avec le modèle théorique au seuil de risque de 10% ».
LYCÉE PONTUS DE TYARD Terminale VI
Chapitre XI
Barycentre
XI.1 Barycentre
Les considérations envisagées dans cette partie sont valables dans le plan et dans l’espace. L’ensemble W dési-gnera, suivant les besoins du lecteur, le plan P ou l’espace E.
XI.1.1 Introduction
DÉFINITIONS XI.1.1(1) Un point pondéré est un couple (A, α) où A est un point et α un nombre, appelé coefficient ou masse.
(2) Un système de points pondérés est une collection de points pondérés dans laquelle un même point pondérépeut apparaître plusieurs fois.
(3) La masse d’un système de points pondérés est la somme des coefficients.
Remarque La différence entre un système et un ensemble est que dans un ensemble, un même objet ne peut pas ap-paraître plusieurs fois.
Exemple Soit A, B, C trois points de W,
(A,1),(B,−2),(C,π), (B,−2)
est un système de points pondérés de masse π−3.
XI.1.2 Activités
M ou N désignent des points variables et A, B, C . . . des points fixes.
Exercice XI.1.1. 1. Simplifier :−−→MA +−−→
MB .
2. On considère le système de points pondérés (A,2),(B,2). La fonction vectorielle de Leibniz qui lui est associée est ~f : M 7→ 2−−→MA +2
−−→MB .
I désigne le milieu du segment [AB].
a. Simplifier ~f (M).
b. Soit ~g la fonction vectorielle de Leibniz associée à (I,4).Que peut-on dire de ~f et ~g ?
Exercice XI.1.2. Deux systèmes de points pondérés sont dits équivalents lorsque leurs fonctions vectorielles de Leibniz sont égales. SoitABC un triangle et ~f la fonction vectorielle de Leibniz associée au système (A,1),(B,1),(C,1).
1. Donner l’expression de ~f (M).
2. Démontrer que pour tous points M et N de W :~f (M) = ~f (N)+3
−−→MN .
3. Résoudre l’équation ~f (M) =~0.
4. Déterminer un système réduit à un seul point pondéré équivalent à (A,1),(B,1),(C,1).
5. Quel lien existe-t-il entre ~f et la fonction vectorielle de Leibniz, ~g , associée à (A,2),(B,2),(C,2).
Le point G, centre de gravité de ABC, est aussi appelé isobarycentre des points A, B, C.
Exercice XI.1.3. ABCD est parallélogramme de centre I. On considère le système S : (A,1),(B,−1),(C,1) ; et ~f sa fonction vectorielle de Leib-
niz associée.
153
154 XI. Barycentre
Lorsqu’un système a une masse non nulle, l’unique solution de l’équation ~f (M) =~0 est appelée barycentre du système.
1. Déterminer le barycentre de S.
2. Simplifier ~f (M).
3. Que peut-on dire des systèmes (A,1),(C,1) et (I,2)
4. Que peut-on dire des systèmes S et S′ : (I,2),(B,−1)
5. Justifier que S et S′ ont le même barycentre.
6. Plus généralement énoncer un théorème.
Exercice XI.1.4. ABCD est un parallélogramme de centre I. On considère les systèmes (A,−2),(B,1)(C,1) et S′ : (A,1),(B,−1),(C,1), (D,−1) ;
ainsi que leurs fonctions vectorielles de Leibniz respectives ~f et ~f ′.
1. Préciser la masse des systèmes S et S′.
2. Démontrer que ~f et ~f ′ sont des fonctions constantes.
3. Résoudre ~f (M) =~0 puis ~f ′(M) =~0.
4. Énoncer un théorème sur les systèmes de points pondérés de masse nulle et les fonctions vectorielles de Leibniz constantes.
XI.1.3 Définition et propriétés
DÉFINITION XI.1.2Soit
(Ai ,αi )∣∣ i ∈ 1,n
un système de points pondérés. La fonction vectorielle de LEIBNIZ qui lui est associée est la
fonction,−→f , qui à tout point M de W associe le vecteur
−→f (M) défini par :
−→f (M) =α1
−−−→MA1 +α2
−−−→MA2 +·· ·+αn
−−−→MAn =
n∑
i=1αi
−−−→MAi .
Exemple Soit A et B deux points de W, I le milieu du segment [AB] et−→f la fonction vectorielle de LEIBNIZ associée au
système (A,2),(B,2). Pour tout point M de W :
−→f (M) = 2
−−→MA +2
−−→MB = 2
−−→MI +2
−→IA +2
−−→MI +2
−→IB = 4
−−→MI (XI.1)
En particulier :−→f (I)=~0 ;
−→f (A)= 4
−→AI = 2
−−→AB et
−→f (A)= 4
−→BI =−2
−−→AB .
THÉORÈME XI.1.1
Soit
(Ai ,αi )∣∣ i ∈ 1,n
un système de points pondérésde masse m
(
m =n∑
i=1αi
)
et−→f la fonction vectorielle de Leibniz
qui lui est associée.
(1) Si m , 0, il existe un unique point G de W vérifiant :−→f (G)=~0.
Pour tout point M de W :−→f (M) = m
−−→MG .
(2) Si m = 0, alors−→f est une fonction vectorielle constante.
Démonstration Pour tous points M et N de W, on a :−→f (M)−
−→f (N) =
n∑
i=1αi
−−−→MAi −
n∑
i=1αi
−−−→NAi =
n∑
i=1αi
(−−−→MAi −−−−→
NAi
)
=n∑
i=1
(
αi−−→NM
)
=n∑
i=1
(αi
)−−→NM = m
−−→NM ;
donc : −→f (M) =
−→f (N)+m
−−→MN (XI.2)
Soit A un point fixé. En prenant : N = A, il vient pour tout point M de W :−→f (M) =
−→f (A)+m
−−→MA (XI.3)
Si m, 0
EXISTENCE DE G Introduisons le point G tel que :−−→AG =
1
m
−→f (A).
En utilisant (XI.3) avec : M = G, il vient : −→f (G) =
−→f (A)+m
−−→GA =
−→f (A)−
−→f (A) =~0.
DÉMONSTRATION DE L A FORMULE Pour tous points M de W, en utilisant (XI.2) avec : N =G, il vient :−→f (M)=
−→f (G)+m
−−→MG =~0+m
−−→MG =m
−−→MG .
LYCÉE PONTUS DE TYARD Terminale VI
XI.1. Barycentre 155
UNICITÉ DE G D’après la formule précédente, puisque m , 0, pour tout point M du plan :
−→f (M) =~0 ⇐⇒ m
−−→MG =~0 ⇐⇒ −−→
MG =~0 ⇐⇒ M =G.
Si m = 0Pour tous points M de W, d’après (XI.3) :
−→f (M) =
−→f (A)+0·
−−→AM =
−→f (A).
Donc−→f est une fonction vectorielle constante. ä
Le théorème XI.1.1 justifie la définition suivante.
DÉFINITION XI.1.3Soit
(Ai ,αi )∣∣ i ∈ 1,n
un système de points pondérésde masse non nulle.L’unique point, G, vérifiant :
α1−−−→GA1 +α2
−−−→GA2 +·· ·+αn
−−−→GAn ;
est appelé barycentre du système.
Notations et vocabulaire On peut alors écrire :
G = bar
(A1,α1), · · · , (An ,αn)
Si de plus tous les coefficients sont égaux, ont dit que G est l’ isobarycentre des points A1, · · · , An .
Remarques1. Un système dont la somme des coefficients est nulle n’a pas de barycentre.2. Lorsqu’on évoquera le barycentre d’un système, si cela n’est pas explicitement précisé, il sera sous-entendu quela masse, m, du système est non nulle.3. Si m , 0, le système
(Ai ,αi )∣∣ i ∈ 1,n
est équivalent à (G,m).On en déduit que deux systèmes de masses non nulles sont équivalents si et seulement si ils ont le même barycentreet la même masse.4. Deux systèmes de masses nulles ne sont pas nécessairement équivalents.
ExempleConsidérons le système composé de deux boules homogènes demême masse, m, reliées par une tige rigide et sans masse de longueurℓ. Ce système est équivalent à une masse ponctuelle de masse 2m
placé au centre, I, de la tige.
bA bBm m
bI2m
FIGURE XI.1 –
Exercice XI.1.5. A, B, C, D sont des points fixés de W et M est un point variable. Simplifier les écritures.
a.−−→MA +−−→
MB +−−→MC .
b.−−→MA +−−→
MB −2−−→MC .
c. 3−−→MA +5
−−→MB −4
−−→MC +6
−−→MD .
d. 3−−→MA −5
−−→MB −4
−−→MC +6
−−→MD .
Solution
a. Introduisons l’isobarycentre, G, des points A, B et C. Il vient par réduction, pour tout M ∈W :−−→MA +−−→
MB +−−→MC = 3
−−→MG .
b. On reconnaît une fonction vectorielle de Leibniz associée à un système de masse nulle. Cette fonction est doncconstante, (en calculculant l’image de C) pour tout M ∈W :−−→MA +−−→
MB −2−−→MC =−−→
CA +−−→CB .
En calculant l’image de A on aurait obtenu, tout M ∈W :−−→MA +−−→
MB −2−−→MC =−−→
AB −2−−→AC .
c. On reconnaît la fonction vectorielle de Leibniz associée au système
(A,3),(B,5),(C,−4),(D,6),
de masse 10. On a :10, 0 ; ce système a donc un barycentre que nous appellerons G1 ; il vient par réduction, pour tout M ∈W :
3−−→MA +5
−−→MB −4
−−→MC +6
−−→MD = 10
−−−→MG1 .
d. De même qu’en b., pour tout M ∈W :
3−−→MA −5
−−→MB −4
−−→MC +6
−−→MD =−5
−−→AB −4
−−→AC +6
−−→AD = 3
−−→BA −4
−−→BC +6
−−→BD .
Remarque Les systèmes associés aux questions b. et d. ont une masse nulle, on ne peut donc pas introduire de bary-centre.
- série S

156 XI. Barycentre
XI.1.4 Propriétés
THÉORÈME XI.1.2 HOMOGÉNÉITÉOn ne change pas le barycentre d’un système en multipliant tous ces coefficients par une même constante non nulle.
Démonstration Soit G le barycentre d’un système
(Ai ,αi ) | i ∈ 1,n
de masse non nulle et λ un réel non nul.
On a :n∑
i=1αi
−−−→GAi =~0 ; donc :
n∑
i=1
(
λαi−−−→GAi
)
= λn∑
i=1
(
αi−−−→GAi
)
=λ~0 =~0. ä
THÉORÈME XI.1.3Soit A, B, C, D quatre points non coplanaires et a, b, c, d quatre nombres réels tels que :a +b , 0 ; a +b +c , 0 ; a +b +c +d , 0.
(1) Le barycentre du système (A, a), (B,b) est le point d’abscisseb
a +bsur la droite (AB) munie du repère (A,B).
(2) Le barycentre du système (A, a), (B,b), (C,c) est le point de coordonnées
(b
a +b +c;
c
a +b +c
)
sur le plan
(ABC) muni du repère (A,B,C).(3) Le barycentre du système (A, a), (B,b), (C,c), (D,d) est le point de coordonnées(
b
a +b +c +d;
c
a +b +c +d;
d
a +b +c +d
)
dans E muni du repère (A,B,C,D).
Démonstration Les trois propriétés se démontrent suivant le même schéma. À titre indicatif nous démontrerons la propriété (2).Soit G le barycentre du système. Pour tout point M de W, on a par réduction de somme de Leibniz :
(a +b+c)−−→MG = a
−−→MA +b
−−→MB +c
−−→MC .
Pour M = A, on en déduit que :−−→AG =
b
a +b+c
−−→AB +
c
a +b+c
−−→AC .
D’où l’on tire le résultat désiré. äExercice XI.1.6. A et B sont deux points tels que AB = 3. Placer le barycentre G du système (A,−2),(B,5).
Solution G est le point d’abscisse5
3sur la droite (AB) munie du repère (A,B).
A B G
Exercice XI.1.7. Le plan est muni du repère (O ;~ı ,~ ). On considère les points A(1;−1), B(5 ;-1) et C(2;2).Placer le point, G, barycentre du système (A,−5),(B,9),(C,8)
Solution La masse du système est 12, donc par homogénéité : G = bar
(
A;−5
12
)
,
(
B;3
4
)
,
(
C ;2
3
)
. Nous en déduisons
que G est le point de coordonnées
(3
4;
2
3
)
dans le repère (A,B,C).
THÉORÈME XI.1.4Soit A, B, C, D quatre points non coplanaires et x, y , z trois nombres réels.(1) Sur la droite (AB) munie du repère (A,B), le point d’abscisse x est le barycentre du système (A,1− x), (B, x).(2) Dans le plan (ABC) muni du repère (A,B,C) le point de coordonnées
(
x ; y)
est le barycentre du système(A,1− x − y), (B, x), (C, y).(3) Dans E muni du repère (A,B,C,D)le point de coordonnées (x ; y ; z) est le barycentre du système(A,1− x − y − z), (B, x), (C, y)(D, z).
Démonstration Les trois propriétés se démontrent suivant le même schéma. À titre indicatif nous démontrerons la propriété (2).Soit M(x ; y) dans le repère (A,B,C). On a :
−−→AM = x
−−→AB + y
−−→AC = x
−−→AM +x
−−→MB + y
−−→AM + y
−−→MC .
On en déduit que :
(1−x − y)−−→MA +x
−−→MB + y
−−→MC =~0.
D’où l’on tire le résultat désiré. äLe corollaire suivant est une conséquence immédiate des théorèmes XI.1.3 et XI.1.4.COROLLAIRE XI.1.5
Soit A, B, C, D quatre points non coplanaires(1) L’ensemble des barycentres des points A et B est la droite (AB).(2) L’ensemble des barycentres des points A, B et C est le plan (ABC).(3) L’ensemble des barycentres des points A, B, C et D est l’espace E.
Démonstration Démontrons par exemple (2).
LYCÉE PONTUS DE TYARD Terminale VI

XI.1. Barycentre 157
D’après le théorème XI.1.3 tout barycentre de A, B, C est un point de (ABC).D’après le théorème XI.1.4 tout point de (ABC) est un barycentre de A, B, C.Donc, l’ensemble des barycentres des points A, B et C est le plan (ABC). ä
THÉORÈME XI.1.6 ASSOCIATIVITÉDans un système de points pondérés, lorsqu’on remplace un sous-système par un sous-système équivalent, on ob-tient un système équivalent.
Démonstration Soit un système
(Ai ,αi ) | i ∈ 1,n
,−→f la fonction vectorielle de LEIBNIZ associée et
(B j ,β j ) | j ∈ 1,p
un système équivalent
au système(Ai ,αi ) | i ∈ 1,q
(avec 0 < q <n).
Nous devons démontrer que les systèmes(A1,α1), · · · , (Aq ,αq ),(Aq+1 ,αq+1), · · · , (An ,αn )
et
(B1 ,β1), · · · , (Bp ,βp ),(Aq+1 ,αq+1), · · · , (An ,αn )
ont la même fonction vectorielle de LEIBNIZ.
Pour tout point M de W, on a :q∑
i=1αi
−−−→MAi =
p∑
j=1β j
−−−→MB j .
Donc, pour tout point M de W :−→f (M) =
n∑
i=1αi
−−−→MAi =
q∑
i=1αi
−−−→MAi +
n∑
i=q+1αi
−−−→MAi =
p∑
j=1β j
−−−→MB j +
n∑
i=q+1αi
−−−→MAi ä
Remarque Le théorème XI.1.6 signifie, entre autre, qu’on ne change pas le barycentre d’un système en remplaçant unsous-système par un sous-système équivalent.
Exercice XI.1.8. Soit ABC un triangle et a, b, c trois réels tels que : a +b , 0 ; b + c , 0 ; c +a , 0 et a +b + c , 0. On considère les points A′,B′ et C′, barycentres respectifs des systèmes : (B,b),(C,c) ; (C,c),(A, a) ; (A, a),(B,b).
1. Justifier l’existence des points A′, B′ et C′.
2. Démontrer que les droites (AA′), (BB′) et (CC′) sont concourantes en un point qu’il conviendra de préciser.Solution 1. Les systèmes : (B,b), (C,c) ; (C,c), (A, a) ; (A, a), (B,b) ; sont chacun de masse non nulle, donc leurs
barycentres existent.
2. Posons : G = bar
(A, a)(B,b), (C,c)
.Par associativité, on a : G = bar
(A, a)(A′,b +c)
= bar
(B,b), (B′, a +c)
= bar
(C,c), (C′, a +b)
.Donc G appartient à la fois aux trois droites :G est le point de concours des droites (AA′), (BB′) et (CC′).
THÉORÈME XI.1.7L’espace E est muni d’un repère
(
O ;~ı,~ ,~k)
.
Pour i ∈1;n on considère des points Ai (xi ; yi ; zi ) et G le barycentre du système
(Ai ,αi )∣∣ i ∈ 1,n
de masse m nonnulle.
Les coordonnées de G sont :
xG =1
m
n∑
i=1αi xi
yG =1
m
n∑
i=1αi yi
zG =1
m
n∑
i=1αi zi
Démonstration Pour tout point M de E, on a :
m−−→MG =
n∑
i=1αi
−−−→MAi .
Pour M = O, on en déduit que :
−−→OG =
1
m
n∑
i=1αi
−−−→OAi .
D’où l’on tire le résultat désiré. ä
Remarque Dans le plan on a de même :
xG =1
m
n∑
i=1αi xi
yG =1
m
n∑
i=1αi yi
DÉFINITION XI.1.4Soit f une application de W dans lui-même.On dira que f conserve les barycentres si pour tout système
(Ai ,αi )∣∣ i ∈ 1,n
de masse non nulle m et de barycentreG, le système
( f (Ai ),αi )∣∣ i ∈ 1,n
a pour barycentre f (G).
Les isométries ont été vues en classe de Seconde, les homthéties seront vues à la fin de l’année scolaire et les simi-litudes seront vues en enseignement de spécialité en classe de Terminale. Nous admettons le théorème suivant.THÉORÈME XI.1.8
- série S
158 XI. Barycentre
(1) Les isométries (translations, rotations, réflexions . . .), les homothéties et plus généralement les similitudesconservent le barycentre.(2) Les projections conservent le barycentre.
XI.1.5 Exercices
XI.1.a. ABC est un triangle. Démontrer que l’isobary-centre des points A, B, C est le point de concours des
médianes du triangle ABC.
LYCÉE PONTUS DE TYARD Terminale VI
Index
affixe, 80arbre pondéré, 137
barycentre, 155base
d’une exponentielle, 62binôme de NEWTON, 127borne inférieure d’une partie deR, 31borne inférieure d’une suite, 32borne supérieur d’une partie deR, 31borne supérieur d’une suite, 32C, 78cardinal, 121centre de symétrie d’une courbe, 11composée
d’une suite par une fonction, 32coordonnées polaires, 81courbe intégrale, 65
dérivée n-ième d’une fonction, 73densité de probabilité, 149discriminant, 20
écart type, 140épreuve de Bernoulli, 144équation
différentielle, 65espérance mathématique, 140événement(s), 131
élémentaire, 131certain, 131impossible, 131indépendants, 134
éventualité, 131
imaginairepur, 78
inégalitéde Bernoulli, 7
intégraled’une fonction constante, 100d’une fonction continue, 108d’une fonction en escalier, 101impropre, 148
isobarycentre, 155issue, voir éventualité
König(formule de), 141
logarithme
décimal, 63de base a, 63népérien, 59
loiuniforme, 151
loi de probabilité, 139binomiale, 144conjointe, 143couple, 142marginale, 143simultanée, 143
majorant d’une partie deR, 31mantisse, 64minorant d’une partie deR, 31MOIVRE (formule de), 84moyenne
arithmétique, 38géométrique, 40
nombres complexesarguments, 82conjugué, 78définition, 78forme algébrique, 78forme trigonométrique, 83inverse, 79point image, 80quotient, 79vecteur image, 80
ordre d’une équation différentielle, 65
partition, 65, 121point pondéré, 153première bissectrice, 33, 54probabilité(s), 132
conditionnelle, 136conjointes, 143simultanées, 143
racine n-ième (réelle), 55racines carrées d’un nombre complexe
forme algébrique, 92forme exponentielle, 86
schéma de Bernoulli, 144solution d’une équation différentielle, 65somme
de Darboux, 105de Riemann, 104
159
160 Index
suitearithmético-géométrique, 41arithmétique, 37bornée, 34constante, 35convergente, 43croissante, 35décroissante, 35divergente, 43géométrique, 39majorée, 34minorée, 34monotone, 35numérique, 32stationnaire, 35
suites adjacentes, 50synonyme, 1système de points pondérés, 153
temps caractéristique, 67théorème
bijection (de la), 54fondamental de l’algèbre, 87fondamental de l’analyse, 108probabilités totales (des), 137
faible, 133
univers, 131univers image, 139
variable(s) aléatoire(s), 138indépendantes, 143, 144
variance, 140
LYCÉE PONTUS DE TYARD Terminale VI







![Math ematiques { r esum e du cours - lptmslptms.u-psud.fr/christophe_texier/files/2019/02/cours-math-resume.pdf · 2]ˇ;+ˇ] correspond a la ˝d etermination principale du logarithme](https://img.pdfslide.fr/doc/110x75/5ecfa16297b70b240407991b/math-ematiques-r-esum-e-du-cours-lptmslptmsu-psudfrchristophetexierfiles201902cours-math-.jpg)
![Math ematiques pour physiciens - lpthe.jussieu.frzuber/Cours/L3_2013.pdf · Bibliographie [1]Walter Appel, Math ematiques pour la physique et les physiciens!, H& K Editions [2]Claude](https://img.pdfslide.fr/doc/110x75/5e81febe5e2a33649161eda0/math-ematiques-pour-physiciens-lpthe-zubercoursl32013pdf-bibliographie.jpg)