-
ECONOMETRIE (*)
Hlne Hamisultane I/ QUEST CE QUE LECONOMETRIE ? II/ LE MODELE DE
REGRESSION SIMPLE II.1/ Mthode destimation des Moindres Carrs
Ordinaires (MCO) II.2/ Hypothses et proprits des estimateurs des
MCO II.3/ Critre de jugement de la qualit de lajustement dun modle
: R III/ LE MODELE DE REGRESSION MULTIPLE III.1/ Mthode destimation
des Moindres Carrs Ordinaires (MCO) III.2/ Hypothses et proprits
des estimateurs des MCO III.3/ Critre de jugement de la qualit de
lajustement dun modle : R , R2c , s III.4/ Utilisation de variables
indicatrices pour la correction des valeurs anormales et dtection
des valeurs anormales. III.5/ Prvision IV/ LES TESTS IV.1/ Test de
significativit dun coefficient : test de student IV.2/ Test de
significativit global : test de Fisher IV.3/ Test de normalit des
erreurs IV.4/ Tests dautocorrlation : Durbin-Watson et Box-Pierce
IV.5/ Test dhtroscdasticit : test de White IV.6/ Test de stabilit :
test de Chow IV.7/ Test de colinarit : test de Belsley Khu Welsh V/
VIOLATION DES HYPOTHESES V.1/ Mthode des Moindres Carrs Gnraliss
(MCG) V.2/ Autocorrlation des erreurs dordre 1 et MCG : mthode de
Cochrane-Orcutt V.3/ Htroscdasticit et MCG
(*) Document inspir de louvrage de Bourbonnais (2000),
Economtrie, Dunod.
1
-
VI/ LES MODELES DYNAMIQUES
VI.1/ Modle autorgressif : critres de Akaike, Schwarz et h de
Durbin VI.2/ Modle autorgressif retards chelonns BIBLIOGRAPHIE :
Bourbonnais R. (2000), Economtrie, DUNOD. Johnston J. et Dinardo J.
(1999), Mthodes Economtriques, Economica.
I/ QUEST CE QUE LECONOMETRIE ? La dmarche conomtrique consiste
reprsenter laide dquations le comportement dun phnomne observ et
estimer les coefficients des quations en recourant lhistorique du
phnomne et ceci dans le but de le comprendre, de lexpliquer, de le
reproduire et de le prvoir. Admettons que nous constatons le fait
conomique suivant :
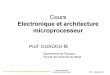
Figure 1 : Revenu disponible et Consommation des mnages au cours
du temps
29 33 37 41 45 49 53 57 61 65 69100
150
200
250
300
350
400
450
500
550
CRD
On observe que les 2 courbes voluent pratiquement dans le mme
sens : elles augmentent et diminuent simultanment. On peut penser
quil y a un lien entre ces 2 variables. On peut en effet penser que
la consommation C des mnages est influence par le revenu disponible
RD. Lorsque le revenu augmente, la consommation saccrot.
2
-
En mettant en abscisse le revenu disponible et en ordonne la
consommation des mnages, on obtient le graphique suivant :
Figure 2 : Consommation des mnages en fonction du revenu
disponible
rd
c
80 160 240 320 400 480 560100
150
200
250
300
350
400
450
500
On saperoit que les points forment une droite. On peut supposer
quelle a pour quation :
Ct = a1RDt + a0 o Ct et RDt dsignent respectivement la
consommation et le revenu disponible linstant t. A partir de cette
droite (ou dit modle(1)), des donnes recueillies sur la
consommation et le revenu disponible des mnages au fil du temps et
de la thorie conomtrique que nous prsenterons ci-aprs, on peut
dterminer la valeur des paramtres a1 et a0. La connaissance de ces
valeurs nous permettra dune part de mesurer linfluence de la
variable explicative (RDt) sur la variable expliquer (Ct) et dautre
part de prvoir lvolution de la variable endogne. En connaissant
lvolution future de la consommation des mnages, une entreprise peut
par exemple envisager daugmenter ou non sa production. II/ LE
MODELE DE REGRESSION SIMPLE Soit le modle suivant :
yt = a1xt + a0 . (1) Il sagit ici dun modle en srie temporelle
dans lequel les variables voluent au cours du temps. Il existe
aussi les modles en coupe instantane dans lesquels les variables
reprsentent des phnomnes observs au mme instant.
3
-
On parle de modle de rgression simple car le modle ne comporte
quune seule variable explicative qui est xt. Lorsque le modle
comporte plusieurs variables explicatives, on parlera de modle de
rgression multiple. On cherche estimer les coefficients a1 et a0 de
cette droite dans le but de reproduire le phnomne conomique observ.
On ntudiera que lestimation des modles linaires (les droites) une
ou plusieurs variables. Il existe des modles non linaires (
seuil(2) par exemple) dont ltude ne sera pas abords ici. Notations
: Le modle estimer scrit :
yt = a1xt + a0 + t avec par exemple t = 1980, 1981,, 2004 (qui
peut tre remplac par un nombre : t = 1,2,,T ) o t est la date
laquelle on observe la valeur de yt et de xt et t est une variable
alatoire reprsentant lerreur de spcification dont les
caractristiques seront prcises au cours de lnonc des hypothses du
modle. On introduit la variable t pour marquer le fait que toute
modlisation dun phnomne ne peut pas tre parfaite. Une fois que les
coefficients sont estims, le modle va scrire :
t = 1xt + 0 ou encore yt = 1xt + 0 + et o 1 et 0 dsignent les
valeurs estimes des paramtres a1 et a0, et = yt - t est appel le
rsidu du modle. et est lestimateur de lerreur t que lon ne connat
pas. II.1/ Mthode destimation des Moindres Carrs Ordinaires (MCO)
Comment estimer a1 et a0 pour reproduire au mieux le phnomne
conomique observ ? La technique des Moindres Carrs Ordinaire (MCO)
apporte une rponse au problme pos. On doit estimer a1 et a0 de faon
minimiser la distance au carr entre chaque point observ yt et
chaque point t donn par la droite t = 1xt + 0.
(2) Se reporter louvrage de Lardic et Mignon (2002), Economtrie
des Sries Temporelles Macroconomiques et Financires, Economica.
4
-
Soit e = yt t lcart entre ces deux mesures, la mthode ou
technique des MCO consiste rechercher les valeurs de a0 et a1 de
faon minimiser la quantit suivante :
Min t=1
T
e2t = min t=1
T
(yt - t) = min t=1
T
(yt - 1xt - 0) = min S
o T dsigne le nombre dobservations pour les variables yt et xt.
Les conditions ncessaires du 1er ordre pour obtenir un optimum pour
S sont :
S0
= 0 t=1
T
-2(yt - 1xt - 0) = 0 dite "quation normale"
t=1
T
yt - t=1
T
1xt - t=1
T
0 = 0
t=1
T
yt
T -
t=1
T
1xt
T -
T0T
= 0
y
S1
= 0 t=
T
- t=1
T
- t=1
T
T
- t=1
T
Tde a
0axa 01 = la droite dajustement passe par le point moyenty
)y,x(
0 = xay 1
estimateur de a0 par les MCO
1
-2xt(yt - 1xt - 0) = 0 "quation normale"
xtyt + t=1
T
1x2t +
t=1
T
0xt = 0
xtyt +
1t=1
T
x2t
T +
0t=1
T
xt
T = 0
xtyt +
1t=1
T
x2t
T + )xay 1( x = 0 en utilisant lexpression de lestimateur
0
5
-
- t=1
T
xtyt
T +
= 2
T
1t
2t
1 xT
xa + xy = 0
1 = t=1
T
xtyt
T - xy
t=1
T
x2t
T - 2x
=
t=1
T
xtyt - T xy
T
t=1
T
x2t - T2x
T
= t=1
T
xtyt - T xy
t=1
T
x2t - T2x
estimateur de a1 par les MCO
1 = t=1
T
(xt - x )(yt - y )
t=1
T
(xt - x )
car on a t=1
T
(xt - x )(yt - y ) = t=1
T
(xtyt - xt y - x yt + xy )
= t=1
T
xtyt - t=1
T
xt y - t=1
T
x yt + t=1
T xy
= t=1
T
xtyt - T. t=1
T
xt
T. y x .
t=1
T
yt
T . T + T xy
= t=1
T
xtyt T yx yx T + T xy
= t=1
T
xtyt yx T.
Les conditions suffisantes du 2nd ordre pour obtenir un minimum
pour S sont : La fonction S est convexe car on a
S21
> 0 ;
S21
S 10
S 01
S20
> 0.
6
-
Loptimum trouv est donc un minimum. II.2/ Hypothses et proprits
des estimateurs des MCO Les hypothses lies lerreur t sont : H1 : xt
est une variable certaine (non alatoire) Cov(xt,t) = 0 t : la
variable explicative et lerreur sont indpendantes. H2 : E(t) = 0 t
: lerreur est desprance nulle. H3 : Var(t) = E(
2t ) (E(t)) = E(2t ) = 2 t car on a suppos E(t) = 0
la variance de lerreur est constante (soit homoscdasticit de
lerreur). H4 : Cov(t,t) = E(t. t) E(t).E(t) = E(t. t) = 0 car on a
E(t) = 0 t t les erreurs sont non corrles. Ces hypothses permettent
aux estimateurs dobtenir les bonnes proprits suivantes : 1/ les
estimateurs sont sans biais (3) : E(1) = a1 et E(0) = a0 ; 2/ les
estimateurs sont convergents (4) : lim
T Var(1) = 0 et limT Var(0) = 0 .
Thorme de Gauss-Markov : Les estimateurs des MCO ont la plus
petite variance parmi les estimateurs linaires sans biais. On dit
que ce sont des estimateurs BLUE (Best Linear Unbiased
Estimator).
(3) Voir la dmonstration laide du modle de rgression multiple
qui est plus simple mener.
(4) Var(1) =
2
t=1
T (xt - x )
et Var(0) = 2
1
T +
2x
t=1
T (xt - x )
(pour la dmonstration : se reporter louvrage de Dormont,
Introduction lconomtrie, Montchrestien).
7
-
II.3/ Critre de jugement de la qualit de lajustement dun modle
Soit la dcomposition suivante :
t=1
T
(yt - y ) = t=1
T
(t - ) + t=1
T
e2t y
SCT = SCE + SCR
o SCT = somme des carrs totale ou variabilit totale de yt , SCE
= somme des carrs explique ou variabilit explique par t , SCR =
somme des carrs des rsidus ou variabilit des rsidus. Il vient
lquation suivante appele quation danalyse de la variance :
t=1
T
(yt - y )
T =
t=1
T
(t - y )
T +
t=1
T
e2t
T
soit
Var(y) = Var() + Var(e). A partir de lquation danalyse de la
variance, on va construire le critre du R (ou coefficient de
dtermination) pour juger de la qualit dun ajustement. Le R est donn
par le rapport suivant :
R = SCESCT
= t=1
T
(t - y )
t=1
T
(yt - y ) =
t=1
T
(t - y )
t=1
T
(yt - y ) = 1 -
t=1
T
e2t
t=1
T
(yt - y ) .
8
-
On a yy = car on a t=1
T
et = 0 lorsque le modle comporte une constante (5).
Plus SCE est proche de SCT, meilleur est lajustement du nuage de
points par la droite des MCO. Le R est compris entre 0 et 1 (0 R 1)
: plus il est proche de 1, meilleur est lajustement. III/ LE MODELE
DE REGRESSION MULTIPLE Le modle de rgression multiple est une
gnralisation du modle de rgression simple. Il comporte plusieurs
variables explicatives. Soit le modle de rgression multiple suivant
qui comporte k variables explicatives :
yt = a0 + a1x1t + a2x2t + + ak-1 x(k-1)t + t Pour t = 1,2,,T ,
on a
(5) Dmonstration de
t=1
T e
t = 0 :
On a et = yt - et = . ty 0t1t axay En sommant les et , on
obtient .
= = = ===T
1t
T
1t
T
1t
T
1t0t1t0t1tt aTxay)axay(e
Or on a xaya 10 = . Il vient alors : = = =
=T1t
T
1t
T
1t1t1tt )xay(Txaye
xaTyTT
xTaT
yT 1
T
1tt
1
T
1tt
+=
==
xaTyTxTayT 11 += = 0. Dmonstration de yy = :
On a et = yt - ty Ty
T
y
T
eT
1tt
T
1tt
T
1tt
=== = = 0 puisque t=1
T e
t = 0.
Do yy = .
9
-
y1 = a0 + a1x11 + a2x21 + + ak-1 x(k-1)1 + 1 y2 = a0 + a1x12 +
a2x22 + + ak-1 x(k-1)2 + 2 yT = a0 + a1x1T + a2x2T + + ak-1 x(k-1)T
+ T
Pour allger cette criture, on va crire ce systme dquations sous
forme matricielle :
Y(T,1) = X(T,k)a(k,1) + (T,1) o on a
Y =
y1y2:.
yT
, X =
1 x11 x21 x(k-1)11 x12 x22 ... x(k-1)2: . : . :. : . :1 x1T x2T
... x(k-1)T
, a =
a0a1
:.
ak-1
et =
12
:.T
III.1/ Mthode destimation des Moindres Carrs Ordinaires (MCO)
Soit le modle gnral suivant :
Y(T,1) = X(T,k)a(k,1) + (T,1) . Afin destimer le vecteur a des
coefficients, on applique la mthode des MCO qui consiste toujours
minimiser la somme des carrs des rsidus, soit :
Min t=1
T
e2t = min ee = min (Y- X)(Y- X) = min S
o e est le transpos du vecteur e . La fonction S est minimale si
on a :
S
= -2XY + 2XX = 0 = (XX)-1XY En effet, on a S = (Y- X)(Y- X) =
(Y- X)(Y- X) = YY YX XY + XX S = YY (XY) XY + XX S = YY 2XY + XX
car le transpos dun scalaire est un scalaire : (XY)= XY.
10
-
En effet, on a S = t=1
T
e2t qui est un scalaire, donc S = YY YX XY + XX est un
scalaire avec (YY)(1,1) , (YX)(1,1) , (XY)(1,1) et (XX)(1,1).
Les quations issues de la relation -XY + XX = 0 sont appeles
quations normales. On voit que lon ne peut obtenir lestimateur de a
que si (XX) est inversible. Lorsquil y a colinarit des variables
explicatives, la matrice (XX)-1 nest pas inversible ! III.2/
Hypothses et proprits des estimateurs des MCO H1 : E() = 0 E(t) = 0
t : lerreur est desprance nulle. H2 : X est une matrice compose de
variables certaines (non alatoires). Cov(xit , t) = 0 t et i : pas
de corrlation entre la variable explicative xit et lerreur t. H3 :
Rg(X) = k et T > k (le nb dobservations T doit tre suprieur au
nb de variables explicatives k car on a Rg(X(T,k)) Min(T,k). Si T
> k, on a alors Rg(X) = k qui est vrifie ) il nexiste pas de
colinarit stricte des k variables explicatives. H4 : V =
E[(-E())(-E())] = E( ) = 2I car on a E() = 0 (H1) V = matrice des
variances-covariances des erreurs o
V = E( ) =
Var(1) Cov(1, 2) ... Cov(1, T)Cov(2, 1) Var(2) ... Cov(2, T)
... ...Cov(T, 1) ... Var(T)
=
E(11) E(12) ... E(1T) E(21) E(22) ... E(2T)
... ... E(T1) ... ... E(TT)
car on a Var(1) = E(21 ) (E(1)) = E(21 ) car E(1) = 0 et Cov(1,
2) = E(12) E(1).E(2) = E(12) car E(1) = E(2) = 0 daprs hypothse H1
postule. Lorsquil ny a pas autocorrlation ni htroscdasticit (
homoscdasticit) des erreurs, on a :
V = E( ) =
2 0 ... 0
0 2 ... 0... ...0 ... 2
= 2I (I est une matrice identit)
car on a Var(t) = 2 t (homoscdasticit des erreurs) et Cov(t, t)
= 0 t t (non
11
-
autocorrlation des erreurs).
H5 : X'XT tend vers une matrice finie non singulire (inversible
ou rgulire).
Ces hypothses permettent aux estimateurs dobtenir les bonnes
proprits suivantes : 1/ les estimateurs sont sans biais (6) : E()=
a ; 2/ les estimateurs sont convergents : lim
T V = 0 .
En effet, on a (7)
V = 2 (XX)-1
ou encore
V = 2
1T
1
T (XX)
-1
On a limT V = 0 si lhypothse H5 suivante est vrifie :
1T
(XX) tend vers une matrice
finie, dfinie positive et inversible lorsque T tend vers . On
calcule V =
2 (XX)-1 laide de lestimateur de 2 qui scrit comme suit :
2 = s =
SCRT-k
= t=1
T
e2t
T-k
(pour la dmonstration : voir Dormont, Introduction lconomtrie,
Montchrestien).
(6) On a = (XX)-1XY = (XX)-1X(Xa+) = (XX)-1XXa + (XX)-1X = a +
(XX)-1X. Do E() = E( )a + (XX)-1X = a + (XX)-1XE() = a car on a E()
= 0 daprs H1. (7) V
= E[ ]( )-E() ( )-E() ' = E[ ]( )-a ( )-a ' car E()=a.
Or = (XX)-1XY = (XX)-1X(Xa+) = a + (XX)-1X. Do a = (XX)-1X . Il
vient alors : V
= E[ ]( )(XX)-1X ( )(XX)-1X '
= E[ ]( XX)-1 X ' X(XX)-1 = ( XX)-1 X E[ '] X(XX)-1 car X est
une matrice compose de variables certaines daprs H2 = 2 ( XX)-1 X
X(XX)-1 car E[ '] = 2 I daprs H4 = 2 ( XX)-1 2 ( XX)-1 .
12
-
III.3/ Critre de jugement de la qualit de lajustement dun modle
Comme pour le modle de rgression simple, on a la dcomposition
suivante :
t=1
T
(yt - y ) = t=1
T
(t - ) + t=1
T
e2t y
SCT = SCE + SCR
o SCT = somme des carrs totale ou variabilit totale de yt , SCE
= somme des carrs explique ou variabilit explique par t , SCR =
somme des carrs des rsidus ou variabilit des rsidus. Do
t=1
T
(yt - y )
T =
t=1
T
(t - y )
T +
t=1
T
e2t
T
Var(y) = Var() + Var(e). Comme pour le modle de rgression
simple, on va construire le critre du R (ou coefficient de
dtermination) partir de lquation danalyse de la variance, do
R = SCESCT
= t=1
T
(t - y )
t=1
T
(yt - y ) =
t=1
T
(t - y )
t=1
T
(yt - y ) = 1 -
t=1
T
e2t
t=1
T
(yt - y ) .
On a comme pour le modle de rgression simple, on a :
yy = et t=1
T
et = 0 (lorsque le modle comporte une constante).
Le coefficient de dtermination corrig : Le R ne permet de
comparer que des modles ayant le mme nombre de variables
explicatives, le mme nombre dobservations et la mme forme (on ne
peut pas comparer un modle simple avec un modle en log). Lorsque
lon ajoute des variables explicatives supplmentaires dans un modle,
le R a tendance augmenter sans quil y ait forcment amlioration du
modle. Cest pourquoi, lorsque lon veut comparer des modles qui nont
pas le mme nombre de variables explicatives, on utilise le R corrig
pour saffranchir du biais :
13
-
R2c = 1 (1 R) T-1T-k
.
Remarque : En gnral, lorsque les modles nont pas le mme nombre
de variables explicatives, on
utilise pour comparer les modles le critre du s = = e'eT-k
o e est le transpos du
vecteur des rsidus du modle estim, T dsigne le nombre
dobservations et k le nombre de variables explicatives. Le meilleur
modle est celui qui a le s le plus petit. Test de Box-Cox : (voir
le doc. "pratique de lconomtrie par Eviews") Le test de Box-Cox
permet de comparer un modle simple un modle en log. III.4/
Utilisation de variables indicatrices (ou variables muettes ou
dummies) Une variable indicatrice est une variable explicative
particulire qui est compose de 0 et de 1. On peut lutiliser dans 3
cas : Correction des valeurs anormales ; En tant que variable
qualitative (Ex : pour la variable sexe de lindividu) ; Correction
de la saisonnalit. On ntudiera ici que la correction des valeurs
anormales. Correction des valeurs anormales (ou points aberrants) :
La prsence dun point aberrant dans une srie temporelle a pour
consquence lautocorrlation des erreurs, il faut donc lliminer. Si
on a une srie temporelle, on ne peut pas le supprimer directement
de la srie (on aurait un trou dans la srie). Il faut utiliser une
variable indicatrice. Cette variable aura une valeur gale 1 pour la
date laquelle on observe le point aberrant et une valeur gale 0
pour toutes les autres dates de la srie temporelle, cest--dire on a
:
I82.3 = 1 si t = 1982.3 pour le 3me trimestre de l'anne 19820
sinon.
Lorsque lon estime le modle suivant avec la variable indicatrice
I82.3 :
14
-
yt = a1xt + a2 I82.3 + a0 + t cela revient estimer le modle
suivant sans le point aberrant en t = 1982.3
yt = a1xt + a0 + t o t et t dsignent lerreur de chacun des 2
modles. Dtection des valeurs anormales : construction de
lintervalle de confiance pour les rsidus : Soit le modle suivant
:
Y = Xa + Le modle estim scrit :
Y = X + e avec e = Y- = Y- PY et P = X(XX)-1X est une matrice de
projection orthogonale. YOn a e = (I- X(XX)-1X)Y = (I-
X(XX)-1X)(Xa+) = Xa+ - X(XX)-1X(Xa+) = Xa + - X(XX)-1XXa - X(XX)-1X
= Xa + Xa - X(XX)-1X = (I - X(XX)-1X) = M o M est une matrice de
projection orthogonale. On obtient :
E(e) = E(M) = ME() = 0 car E() = 0.
Var(e) = E[(e-E(e))(e-E(e))]= E(e.e) car E(e)=0 = E(M.'M) = M
E()M = M Var() M = 2 MM = 2 M car M est une matrice de projection
orthogonale, on a alors M= M et M = M = 2 M = 2 (I - X(XX)-1X) Do,
on a
Var(et)= 2 (1-htt). Si on a ~>N(0, 2I), on a alors :
et ~> N(0, Var(et )) , et suit aussi la loi normale car e =
M. On obtient alors :
et Var(et)
= et 1-htt
~> N(0, 1).
15
-
Si on remplace par son estimateur = s = SCRT-k
, le rapport et s 1-htt
suit alors la loi
de Student avec (T-k) degrs de libert :
et s 1-htt
~> S(T-k).
Lorsque T grand (T > 30), on a et s 1-htt
qui suit la loi normale centre et rduite, on peut
alors crire :
Prob
- 1,96 et
s 1-htt 1,96 = 1
o 1,96 reprsente la valeur critique de la loi normale centre et
rduite pour un risque de 1re espce (en gnrale, = 5%). Do
Prob( )- 1,96 s 1-htt et 1,96 s 1-htt = 95%. Comme htt est petit
et ngligeable, on obtient :
1,96s et 1,96s
qui est approch par -2s et 2s.
Les rsidus qui se trouvent en dehors de cet intervalle sont des
points aberrants. On ne peut enlever un point aberrant ( laide de
la variable indicatrice) que si ce point aberrant a une explication
conomique autrement il faut le conserver dans lchantillon de
donnes. III.5/ Prvisions Lorsque les coefficients du modle ont t
estims, il est possible de faire une prvision un horizon h. Soit un
modle estim sur la priode t = 1,,T :
t = 0 + 1x1t + 2x2t + + k-1 x(k-1)t , si la valeur des variables
explicatives x1(T+1) , x2(T+1) ,, x(k-1)(T+1) est connue en T+1, la
prvision de T+1 est donne par :
16
-
T+1 = 0 + 1x1(T+1) + 2x2(T+1) + + k-1 x(k-1)(T+1) .
Lerreur de prvision en T+1 est donne par :
eT+1 = yT+1 - T+1 . Cette erreur est sans biais car on a E(eT+1)
= 0. Est ce que cet cart eT+1 = yT+1 - T+1 est acceptable ? Pour
rpondre cette question, on va construire un intervalle de confiance
(ou de prvision) pour eT+1. Pour un modle avec une seule variable
explicative , on a :
t/2T-2
1T
+ (xT+1 - x )
t=1
T
(xt - x ) + 1 yT+1 - T+1 + t/2T-2 1T +
(xT+1 - x )
t=1
T
(xt - x ) + 1
car V(eT+1) =
1
T +
(xT+1 - x )
t=1
T
(xt - x ) + 1
(pour la dmonstration : voir Dormont, Introduction lconomtrie,
Montchrestien) o t/2
T-2 reprsente la valeur critique de la loi de Student pour un
risque de % et (T-2) degrs
de libert. Do lintervalle de prvision suivant :
T+1 t/2T-2
1T
+ (xT+1 - x )
t=1
T
(xt - x ) + 1 yT+1 T+1 + t/2T-2 1T +
(xT+1 - x )
t=1
T
(xt - x ) + 1.
Pour un modle avec plusieurs variables explicatives, on a :
t/2T-k
X'T+1(XX)-1XT+1 + 1 yT+1- T+1 + t/2T-k X'T+1(XX)-1XT+1 + 1
car V(eT+1) = [ ] XT+1(XX)-1XT+1 + 1 . 2 Do :
T+1 t/2T-k
X'T+1(XX)-1XT+1 + 1 yT+1 T+1+ t/2T-k X'T+1(XX)-1XT+1 + 1 .
17
-
La vraie valeur yT+1 est contenue dans cet intervalle. Lorsque
lon dispose de la valeur observe yT+1, on peut vrifier si le modle
que lon a estim est bon ou non en regardant si cette valeur
appartient ou non lintervalle de confiance. Si cette valeur
nappartient pas lintervalle de confiance, le modle estim nest pas
bon. IV/ LES TESTS IV.1/ Test de significativit dun coefficient :
test de Student Pour savoir si une variable joue un rle explicatif
dans un modle, on effectue un test de Student ou test de
significativit du coefficient de la variable explicative. Pour
faire un test de Student, il faut vrifier au pralable que les
erreurs suivent une loi normale :
t ~>N(0, 2). Posons dabord les hypothses du test de Student :
soit le modle gnral suivant :
yt = a0 + a1x1t + a2x2t + + ak-1 x(k-1)t + t pour t = 1,2,,T on
a
H0 : ai = 0 o i = 0,1,,(k-1) le coefficient n'est pas
significatif H1 : ai 0 le coefficient est significatif
La statistique de test est :
t = ia
ii
aa ~> S(T-k).
La statistique de test suit la loi de Student (T-k) degrs de
libert car les erreurs du modle suivent une loi normale. Sous H0
vraie, on a
t = ia
i
a ~> S(T-k).
La rgle de dcision est la suivante :
18
-
Si | t | > t* o t* est la valeur crtique de la table de
Student pour un risque fix et un nombre de degr de libert gal (T-k)
on rejette H0 et on accepte H1 : le coefficient est
significativement diffrent de zro et la variable joue un rle
explicatif dans le modle. Remarque : Lorsque la taille dchantillon
est grande (T > 30), on peut comparer | t | directement avec le
seuil critique de la loi normale centre et rduite qui est 1,96
(pour un risque de 5%) car daprs le thorme central limite, la loi
de Student tend vers une loi normale lorsque T est suffisamment
grand. Donc , si | t | > 1,96 on rejette H0 et on accepte H1 :
le coefficient est significatif et la variable joue un rle
explicatif dans le modle. Si le coefficient nest pas
significativement diffrent de zro, il faut enlever la variable
explicative correspondante du modle ( condition que le critre du s
naugmente pas ! Il arrive que nous puissions nous tromper sur la
non significativit dune variable en prsence dune colinarit des
variables explicatives qui entrane des t de Student relativement
faibles nous conduisant rejeter tort certaines variables
explicatives. Cest pourquoi il faut examiner la valeur du s aprs le
retrait des variables juges non significatives. Une hausse de la
valeur du s indique que la variable retire tait en fait
contributive lexplication de la variable endogne). IV.2/ Test de
significativit global (de plusieurs coefficients) : test de Fisher
Le test de Fisher permet de tester la significativit de lensemble
des coefficients dun modle. Soit le modle gnral :
yt = a0 + a1x1t + a2x2t + + ak-1 x(k-1)t + t pour t = 1,2,,T.
Les hypothses du test de Fisher sont les suivantes :
H0 : a1 = a2 = = ak-1 = 0 (la constante a0 est non nul)
l'ensemble des coefficients du modle est non significatif H1 : il
existe au moins un coefficient non nul.
La statistique de test sous H0 vraie est :
f = (SCRc - SCRnc) / (dlc - dlnc)SCRnc / dlnc
~> F(dlc dlnc , dlnc) = F(p,q)
o SCRc = SCR du modle contraint (modle lorsque H0 est
vrifie)
19
-
SCRnc = SCR du modle non contraint (modle lorsque H1 est vrifie)
dlc = degr de libert du modle contraint = T 1 (car il ny a quune
seule variable explicative qui est non nul qui est le terme
constant a0) dlnc = degr de libert du modle non contraint = T-k
(car il y a k variables explicatives au maximum dans le modle). La
rgle de dcision est la suivante : Si f >f*(p,q) o f*(p,q) est la
valeur donne par la table de Fisher pour p et q donns et pour un
risque fix On accepte H1 : il existe au moins un coefficient non
nul. Ce test est peu utilis car lorsquil indique quil y a au moins
un coefficient non nul, il ne prcise pas lesquels. Il est moins
prcis que le test de Student. IV.3/ Test de normalit des erreurs
Avant deffectuer le test de Student, il faut effectuer un test de
normalit afin de vrifier que les erreurs sont gaussiennes. Soit le
modle suivant :
Y = Xa + . Les hypothses du test sont les suivantes :
H0 : t ~>N(0, 2) H1 : les erreurs ne suivent pas une loi
normale.
Une loi normale a un coefficient de symtrie (ou skewness) gal 0
et un coefficient daplatissement (kurtosis) gal 3. Le coefficient
de symtrie est donn par :
3 = 3 3
o 3 est un moment dordre 3 et est lcart-type de lerreur. Le
coefficient daplatissement est donn par :
4 = 4 4
o 4 est un moment dordre 4. Tester les deux hypothses prcdentes
revient en fait tester les quatre hypothses suivantes :
20
-
H0 : 3 = 0 3 = 0 H1 : 3 0 3 0
et H0 : 4 = 3 4 = 34 H1 : 4 3 4 34
On a une loi normale que si on a 3 = 0 et 4 = 3. Les
statistiques de test sont calcules de la faon suivante :
3 = 3 s3
et 4= 4 s4
avec s = SCRT-k
, 3 = 1T
t=1
T
(et - )3 et 4 =
1T
t=1
T
(et -e e )4 .
Sous H0 vraie, on a :
3 ~> N
0 , 3!
T et 4 ~> N
3 , 4!
T.
Do
3-0
3!T
=
3 s3
- 0
3!T
~> N(0,1) et 4-3
4!T
=
4 s4
- 3
4!T
~> N(0,1)
On compare ensuite les valeurs de ces ratios 1,96 (valeur
critique de la loi normale centre et rduite pour un risque de 5% et
pour un nombre dobservations grand (T >30)). La rgle de dcision
est la suivante : si lune des valeurs de ces 2 ratios > 1,96 On
accepte H1 : les erreurs ne suivent pas une loi normale. Les
erreurs nobissent une loi normale que si les valeurs des 2 ratios
< 1,96. IV.4/ Tests dautocorrlation a) Test dautocorrlation des
erreurs dordre 1 : test de Durbin-Watson Soit le modle gnral :
yt = a0 + a1x1t + a2x2t + + ak-1 x(k-1)t + t pour t = 1,2,,T
avec t = t-1 + t , | | < 1 , t ~>N(0, 2 ) et cov(t , t) = 0
pour t t.
21
-
Les hypothses du test sont les suivantes :
H0 : = 0 les erreurs ne sont pas autocorrlesH1 : t = t-1 + t les
erreurs sont autocorrles d'ordre 1
La statistique de test est :
DW = t=2
T
(et - et-1)
t=1
T
(et - e ) =
t=2
T
(et - et-1)
t=1
T
e2t
o et sont les rsidus du modle gnral estim et on a e = 0 car il y
a un terme constant dans le modle. De par sa construction, le DW
varie entre 0 et 4. Nous avons les cas suivants selon les valeurs
que peut prendre le DW : 0 ? 2 ? 4 dL dU 4- dU 4- dL autocorrlation
pas dautocorrlation autocorrlation Les valeurs dL et dU sont
dtermines partir de la table de Durbin et Watson en fonction de la
taille de lchantillon et du nombre de variables explicatives pour
un risque fix. Lorsque nous nous trouvons dans la zone dincertitude
o apparat un point dinterrogation (dans lintervalle [dL, dU] ou
dans lintervalle [4-dU, 4-dL] ), nous choisissons comme hypothse
celle qui est la plus fcheuse, cest--dire H1. Conditions
dutilisation du test de DW : Le modle doit comporter un terme
constant (car les tables de DW sont tabules pour des
modles comportant un terme constant, cependant il existe des
tables pour des modles sans terme constant).
La variable expliquer ne doit pas figurer parmi les variables
explicatives (en tant que
variable retarde). Si cest le cas, on doit utiliser la
statistique du h de Durbin (voir le chapitre VI sur les modles
autorgressifs).
22
-
Causes de lautocorrlation des erreurs : Mauvaise spcification du
modle Instabilit des coefficients Prsence de points aberrants Oubli
dune variable explicative importante Vritable autocorrlation on
utilise dans ce cas la mthode destimation des MCG. b) Test
dautocorrlation des erreurs dordre suprieur : test de Box-Pierce :
Soit le modle suivant :
yt = a0 + a1x1t + a2x2t + + ak-1 x(k-1)t + t pour t = 1,2,,T
avec une autocorrlation des erreurs dordre K ( K>1) :
t = 1t-1 + 2t-2 + + Kt-K + t o t ~>N(0, 2).
Les hypothses de ce test sont les suivantes :
H0 : 1 = 2 = = K = 0 H1 : il existe au moins un i
significativement diffrent de 0.
Pour effectuer ce test, on a recours la statistique Q qui est
donne par :
Q = n =
K
1k
2k
o n est le nombre dobservations et est le coefficient
dautocorrlation dordre k des rsidus estims et .
2k
Sous lhypothse H0 vraie, Q suit la loi du Khi-deux avec K degrs
de libert :
Q = n ~> (K). =
K
1k
2k
La rgle de dcision est la suivante : si Q > k* o k* est la
valeur donne par la table du Khi-Deux pour un risque fix et un
nombre K de degrs de libert On rejette H0 et on accepte H1
(autocorrlation des erreurs).
23
-
IV.5/ Test dhtroscdasticit Il existe plusieurs tests pour
dtecter lhtroscdasticit des erreurs : test de Goldfeld-Quandt, test
de White, test de Breusch-Pagan et test de Park-Glejser. Nous
ntudierons ici que le test de White. Test de White : Le test de
White permet de tester plusieurs variables explicatives censes tre
responsables de lhtroscdasticit des erreurs. Lorsquil y a
htroscdasticit, la variance de lerreur est lie aux valeurs de la
variable explicative responsable de lhtroscdasticit. Le test de
White prend en compte toutes les variables explicatives du modle
ainsi que leur carr et leur produit (de deux variables
explicatives). Soit par exemple le modle suivant :
Ct = a0 + a1Yt + t pour t = 1, 2,,T les hypothses du test
scrivent :
H0 : V(t) = 0 et 1 = 2 = 0 homoscdasticit des erreurs H1 : V(t)
= 0 + 1 Yt + 2 Y2t htroscdasticit des erreurs
La statistique de test sous H0 vraie sexprime de la manire
suivante :
T R ~> (2) (le 2 se rfre aux 2 contraintes 1 = 2 = 0) o T est
le nombre dobservations et R est le coefficient de dtermination de
la rgression suivante :
e2t = 0 + 1 Yt + 2 Y2t
o et est le rsidu du modle estim Ct = 0 + 1Yt + et . La rgle de
dcision du test est la suivante : Si T R > k* o k* est la valeur
donne par la table du Khi-Deux pour un risque et un nombre de degrs
de libert fixs (ici 2 car on a 2 contraintes 1 = 2 = 0) On rejette
H0 et on accepte H1 (il y a htroscdasticit des erreurs). Remarque :
Lorsquil y a des variables indicatrices dans le modle, on ne les
prend pas en compte dans le test car elles ne peuvent pas tre
responsables de lhtroscdasticit (car ce sont des variables dont les
valeurs valent 1 et 0 qui ne sont pas lies la variance de
lerreur).
24
-
Causes de lhtroscdasticit des erreurs : Lhtroscdasticit est un
problme qui est en gnral spcifique aux modles en coupe instantane
qui scrivent par exemple de la manire suivante :
Ci = a0 + a1Yi pour i =1,,20
o Ci = consommation pour le pays i en 1997 et Yi = revenu pour
le pays i en 1997. On tudie la relation entre les variables pour un
ensemble dindividus (personne, pays, vhicules, ) et pour une mme
date. IV.6/ Test de stabilit : test de Chow Le test de Chow permet
de savoir si un modle est stable ou non sur une priode donne. Un
modle instable a ses coefficients qui varient durant la priode
considre. Avant deffectuer un test de Chow, il faut toujours
vrifier quil ny a pas une htroscdasticit des erreurs. En prsence
dune htroscdasticit, le test de Chow rejette tort lhypothse H0 de
stabilit des coefficients. Le test de Chow se construit comme un
test de Fisher. Les hypothses du test sont les suivantes pour le
cas ci-dessous : yt = a1x1t + a2x2t + a3x3t SCR0 temps t yt = a
'1x1t + a
'2x2t + a
'3x3t yt = a
"1x1t + a
"2x2t + a
"3x3t
SCR1 SCR2
H0 : a1 = a'1 = a''1
a2 = a'2 = a''2 le modle est stable
a3 = a'3 = a''3
modle contraint avec SCRc = SCR0 H1 : a'1 a''1 a'2 a''2 le modle
est instable a'3 a''3 modle non contraint avec SCRnc = SCR1 +
SCR2
25
-
o SCRc = somme des carrs des rsidus du modle contraint et SCRnc
= somme des carrs des rsidus du modle non contraint. La statistique
de test sous H0 vraie scrit :
f = (SCRc - SCRnc) / (dlc - dlnc)SCRnc / dlnc
~> F(dlc dlnc , dlnc) = F(p,q)
f = (SCR0 - (SCR1 + SCR2)) / (dlc - dlnc)(SCR1 + SCR2) /
dlnc
~> F(dlc dlnc , dlnc) = F(p,q).
La rgle de dcision est la suivante : Si f > f*(p,q) On
accepte H1 : le modle est instable. IV.7/ Test de colinarit : test
de Belsley Kuh Welsh Lorsquun coefficient nest pas
significativement diffrent de 0, il convient de lliminer et de
r-estimer les coefficients du modle. Les causes de la non
significativit sont : _soit une absence de corrlation avec la
variable expliquer _soit une colinarit trop leve entre les
variables explicatives. Une colinarit stricte (par exemple x1=2x2)
entrane un message ERROR de lordinateur car (XX)-1 ne peut tre
calcul, XX nest pas inversible. En effet, on a det(XX)=0. Dans le
cas dune colinarit non stricte (x1 2x2), le det(XX)0 ce qui va
impliquer des valeurs numriques de (XX)-1 qui seront trs grandes
puisque le dterminant tend vers 0. Il en rsulte que les estimateurs
des coefficients tendront avoir des variances leves. En effet, on a
V=
2 (XX)-1 et les t de Student des coefficients estims de vont
.
Dans ce cas, les variables deviennent non significatives alors
quelles peuvent expliquer la variable endogne. Il convient donc de
faire un test de colinarit (test de Belsley Kuh Welsh) dans le cas
o on aurait plusieurs variables et des t de Student petits. La
colinarit des variables explicatives est trs frquente dans les
modles retards chelonns. Principe du test : On regarde pour faire
le test de colinarit lindice de conditionnement :
26
-
Ik = dmax dmin = max
min
o d est la valeur singulire de X(T,k) et est la valeur propre de
la matrice XX. On a
XX = VV o V est la matrice orthogonale des vecteurs propres de
XX et dsigne la matrice diagonale des valeurs propres de XX car XX
est une matrice carre et symtrique ((XX) = (XX)) et on peut donc la
diagonaliser. De ce fait, on peut aussi crire
X(T,k) = UDV o U est telle que UU = I et D est la matrice
diagonale des valeurs singulires d de X. Si on remplace cette
expression dans celle de XX, on obtient
XX = (UDV)(UDV) = VDUUDV = VDDV = VDV. En procdant par
identification, on obtient alors
D = . On a bien
di = i . Lindice de conditionnement va nous indiquer si nous
avons ou non une relation entre les variables explicatives. Belsley
Kuh Welsch ont dfini plusieurs indices pour reprer plusieurs
relations de colinarit : Pour d0>d1>>dk-1 , on a
I0 = d0d0
=1 , I1 = d0d1
> I0 , I2 = d0d2
> I1 , .... , Ik-1 = d0
dk-1 = dmax
dmin .
On commence par ltude de lindice le plus grand qui est Ik-1.
Si on a une relation de colinarit, on a la valeur propre i 0 ,
di0 et Ii = djdi grand.
Si Ik-1 < 30, il ny a pas de problme de colinarit Si 30<
Ik-1 100, il y a un gros problme de colinarit. Dans le cas dune
colinarit (Ik-1 > 30) , on analyse les autres indices pour
savoir sil y a une autre relation de colinarit.
27
-
Sil y a colinarit, on regardera ensuite le tableau de
dcomposition de la variance pour dterminer les variables qui sont
lies entre elles (pour une part de la variance> 0,4 la variable
est responsable de la colinarit). On analyse le tableau de
dcomposition de la variance que si on a dtect une colinarit en
regardant les indices I. Tableau de dcomposition de la variance
:
Valeurs singulires
V(0) V(1) V((k-1)) indices
d0 00 10 I0 = d0d0
=1
d1 01 11 I1 = d0d1
dk-1 0(k-1) 1(k-1) Ik-1 = d0
dk-1
On a V= 2 (XX)-1 = 2 VD-2V V(i) = 2
n=0
k-1
v2i n
d2n = 2
n=0
k-1
in
o n=0
k-1
v2i n
d2n = somme de tous les lments de n=0,,k-1 de la ligne i de la
matrice VD-2V.
On a in = in i
o i = n=0
k-1
in pour i = 0,, k-1.
On a V=
2 (XX)-1 = 2 VD-2V
car XX = VDV. Do (XX)1 = (VDV)-1 = (V)-1D-2V-1. Or V est une
matrice orthogonale do V = V-1 et on a (XX)1 = VD-2V. Comment
remdier la colinarit ? On regroupe les variables colinaires pour ne
former quune seule variable : On peut faire une combinaison linaire
: yt = a0 + a1(xt + zt) On peut faire une diffrence premire : yt =
a0 + a1(xt - xt-1)
28
-
On peut aussi supprimer une (ou plusieurs) des variables
colinaires. V/ VIOLATION DES HYPOTHESES Lorsque les erreurs du
modle de base ne respectent pas les hypothses, notamment
lorsquelles sont : (i) autocorrles ; (ii) htroscdastiques ; les
estimateurs des coefficients partir de la mthode des MCO nont pas
les bonnes proprits (estimateurs de variance non minimale). Cest
pourquoi en prsence dune autocorrlation et/ou dune hrroscdasticit
des erreurs, il faut recourir une autre mthode destimation qui est
celle des Moindres Carrs Gnraliss (MCG). Cette mthode est utiliser
seulement aprs avoir vrifi que le non respect des hypothses ne
provient pas des causes cites plus haut (absence dune variable
explicative importante, prsence dun point aberrant,). V.1/ Mthode
des Moindres Carrs Gnraliss (MCG) Soit le modle linaire gnrale
suivant :
Y(T,1) = X(T,k)a(k,1) + (T,1) o la matrice des
variances-covariances scrit
V = E( ) =
Var(1) Cov(1, 2) ... Cov(1, T)Cov(2, 1) Var(2) ... Cov(2, T)
... ...Cov(T, 1) ... Var(T)
=
E(11) E(12) ... E(1T) E(21) E(22) ... E(2T)
... ... E(T1) ... ... E(TT)
V
2 0 ... 0
0 2 ... 0... ...0 ... 2
= 2I lorsquil y a autocorrlation ou/et htroscdasticit
des erreurs . Lestimateur des MCG est donn par :
= (XV-1 X)-1 (XV-1 Y). Cet estimateur est appel aussi estimateur
de Aitken.
29
-
On remarque que lorsque les hypothses sont vrifies, on retrouve
lestimateur des MCO :
= (XV-1 X)-1 (XV-1 Y) =
X
1
2 I X
-1
X
1
2 I Y = (XX)-1XY .
Les proprits de cet estimateur sont les suivantes : Il est biais
mais asymptotiquement sans biais (si T est grand). En effet, on a =
(XV-1 X)-1 (XV-1 Y) = (XV-1 X)-1 XV-1 (Xa + ) = (XV-1 X)-1 XV-1 Xa
+ (XV-1 X)-1 XV-1 = Ia + (XV-1 X)-1 XV-1 Do E() = E(a + (XV-1 X)-1
XV-1 ) = a + E((XV-1 X)-1 XV-1 ). Comme V 2I , on ne peut pas le
sortir des parenthses et on a donc : E((XV-1 X)-1 XV-1 ) 0 et E()
a. Il a une variance minimale. V.2/ Autocorrlation des erreurs et
MCG Lorsque lon a une autocorrlation des erreurs, on a cov(t,t) 0
pour t t. Supposons que lon ait une autocorrlation des erreurs
dordre 1, le modle linaire va scrire :
Y = Xa +
avec t = t-1 + t | | < 1 , t ~>N(0, 2 ) et cov(t , t) = 0
pour t t. On a
Var(t) = 2 = Var(t-1 + t ) = Var(t-1) + Var(t) + 2 cov(t-1 , t).
Or ces lments peuvent scrire :
Var(t-1) = 2 , Var(t) = 2 et cov(t-1 , t ) = E(t-1 .t)
E(t-1).E(t) = 0 car E(t) = 0 t , E(t) = 0 t et E(t-1 .t) =
E(t-1).E(t) du fait que t-1 et t sont indpendants. Do
30
-
Var(t) = 2 = 2 + 2
et on a 2 (1- ) = 2 et donc Var(t) = 2 = 2
1- .
On remarque que : t = t-1 + t = (t-2 + t-1) + t = t-2 + t-1 + t
car on a t-1 = t-2 + t-1 = ( t-3 + t-2 ) + t-1 + t = 3t-3 + t-2 +
t-1 + t ...
t = st-s + i=0
s-1
it-i .
De plus, on observe que : Cov(t , t-s) = E(t .t-s) E(t). E(t-s)
= E(t .t-s) car on a E(t) = 0 t . Do
Cov(t , t-s) = E(t .t-s) = E
st-s +
i=0
s-1
it-i t-s = sE(2t-s ) + i=0
s-1
iE(t-i . t-s)
= s2 = s2
1-
car on a E(t) = 0 t et donc E(2t-s ) = E(2t-s ) (E(t-s)) =
Var(t-s) = 2 et E(t-i .t-s) = E(t-i ).E(t-s) = 0 car E(t) = 0 t et
t et t sont indpendants. La matrice V des variances-covariances va
alors scrire :
V =
Var(1) Cov(1, 2) ... Cov(1, T)Cov(2, 1) Var(2) ... Cov(2, T)
... ...Cov(T, 1) ... Var(T)
=
2 Cov(1, 2) ... Cov(1, T)Cov(2, 1) 2 ... Cov(2, T)
... ...Cov(T, 1) ... 2
=
2 2 ... 2T-1
2 2 ... 2T-2
... ... 2T-1 ... 2
= 2
1-
1 ... T-1 1 ... T-2
... ... T-1 ... 1
2 0 ... 0
0 2 ... 0... ...0 ... 2
= 2I .
Lorsque lon utilise la mthode des MCO sur un modle qui comporte
une autocorrlation des erreurs dordre 1, on a : Un estimateur =
(XX)-1 XY qui est toujours sans biais : E() = a Un estimateur =
(XX)-1 XY qui na plus la plus petite variance.
31
-
On va estimer un modle qui comporte une autocorrlation dordre 1
laide de la mthode des MCG car on a vu que lestimateur des MCG tait
non biais asymptotiquement et avait la plus petite variance. Il y a
deux faons dutiliser la mthode des MCG : 1/ On applique directement
la mthode des MCG au modle de base : On a le modle de base suivant
:
Y = Xa + avec E( ) = V 2I . Lestimateur des MCG scrit :
= (XV-1 X)-1 (XV-1 Y)
avec V = 2
1 ... T-1 1 ... T-2
... ... T-1 ... 1
= 2
1-
1 ... T-1 1 ... T-2
... ... T-1 ... 1
et V-1 = 1
2
1 - ... 0 0- 1+ ... 0 0 0 - ... 0 0: : : : 0 0 ... 1+ - 0 0 ...
- 1
.
2/ On transforme le modle de base et on applique la mthode des
MCO. On aboutit un rsultat quivalent celui donn en 1/. On recherche
une transformation matricielle P telle que le modle PY= PXa + P ait
ses erreurs non corrles, cest--dire : E((P)( P)) = E(P P) = PE( )P
= PVP = P
2 MP = 2 PMP = 2 P(P-1(P)-1)P
= 2 P(PP)-1P = 2 I. Dans ce cas, on peut estimer le modle par la
mthode des MCO :
= ((PX)PX)1(PX)PY = (XPPX)1XPPY. En comparant lestimateur des
MCO avec celui des MCG, on constate que:
V-1 = PP et V = 2 M = 2(PP)-1.
32
-
Comme on sait que
V = 2
1 ... T-1 1 ... T-2
... ... T-1 ... 1
= 2
1-
1 ... T-1 1 ... T-2
... ... T-1 ... 1
= 2
1 1-
... T-1
1 1-
... T-2
... ...
T-1 ... 1 1-
et V-1 = 1
2
1 - ... 0 0- 1+ ... 0 0 0 - ... 0 0: : : : 0 0 ... 1+ - 0 0 ...
- 1
= PP.
Or on peut galement crire V-1 =
1 2
PP puisquon a :
=
X
1
2 PP X
-1 X
1
2 PP Y = (XPPX)1XPPY.
On peut alors dduire que :
P =
1- 0 0 ... 0 0- 1 0 ... 0 00 - 1 ... 0 0: : : : :0 0 0 ... -
1
et P =
1- - 0 ... ... 00 1 - ... ... 00 0 1 ... ... 0: : : : :0 0 0 ...
... 1
.
On transforme alors le modle de base en le multipliant par la
matrice P :
PY = PXa + P
o P =
1- 0 0 ... 0 0- 1 0 ... 0 00 - 1 ... 0 0: : : : :0 0 0 ... -
1
.
On obtient alors :
33
-
1- 0 0 ... 0 0- 1 0 ... 0 00 - 1 ... 0 0: : : : :0 0 0 ... -
1
y1y2:.
yT
=
1- 0 0 ... 0 0- 1 0 ... 0 00 - 1 ... 0 0: : : : :0 0 0 ... -
1
1 x11 x21 x(k-1)11 x12 x22 ... x(k-1)2
: . : . :. : . :1 x1T x2T ... x(k-1)T
a0a1
:.
ak-1
+
1- 0 0 ... 0 0- 1 0 ... 0 00 - 1 ... 0 0: : : : :0 0 0 ... -
1
12
:.T
Do
( 1-) y1y2 y1
:.
yn yn-1
=
1- ( 1-) x11 1- x21 x11
: : ::
1- xn1 x(n-1)1
a0a1:.
ak-1
+
( 1-) 12 1
:.
n n-1
On obtient lquation suivante :
yt yt-1 = a0(1-) + a1(x1t x1(t-1)) + + ak-1(x(k-1)t x(k-1)(t-1))
+ (t t-1) dyt = b0 + a1dx1t + ... + ak-1dx(k-1)t + t car on a t =
t-1 + t | | < 1 , t ~>N(0, 2 ) . Le terme alatoire t rpond
aux hypothses de base de la mthode des MCO, nous pouvons donc
utiliser la mthode des MCO pour estimer ce modle transform. On
remarque que pour estimer le modle transform, il nous faut connatre
. Plusieurs procdures permettent destimer la fois et les autres
paramtres du modle transform : estimation directe de , estimation
itrative de et des autres paramtres (mthode de Cochrane-Orcutt),
mthode du balayage (mthode de Hildreth-Lu) et mthode du maximum de
vraisemblance. La mthode de Cochrane-Orcutt est la plus rpandue
(dans les logiciels) et la mthode de Hildreth-Lu donne des rsultats
relativement similaires ceux de la mthode de Cochrane-Orcutt.
34
-
Estimation itrative de et des autres paramtres : mthode de
Cochrane-Orcutt : Soit le modle de base suivant :
Y = Xa + on estime ce modle par la mthode des MCO et on constate
une autocorrlation des erreurs dordre 1 en analysant la statistique
de DW. On envisage alors destimer le modle transform :
PY = PXa + P
o P =
1- 0 0 ... 0 0- 1 0 ... 0 00 - 1 ... 0 0: : : : :0 0 0 ... -
1
afin dliminer lautocorrlation des erreurs. On aboutit lquation
suivante estimer :
yt yt-1 = a0(1-) + a1(x1t x1(t-1)) + + ak-1(x(k-1)t x(k-1)(t-1))
+ (t t-1) On va utiliser la mthode de Cochrane-Orcutt : Etape 1 :
initialisation de Dtermination de la premire valeur de
par une rgression directe des rsidus et sur et-1 du modle de
base :
= t=2
T
et et-1
t=1
T
e2t avec e = Y-Xa
laide de la statistique de DW donne suite la rgression du modle
de base :
= 1 - DW2
Soit 0 =
Etape 2 : rgression sur les quasi-diffrences laide de la mthode
des MCO
yt 0yt-1 = a0(1-0) + a1(x1t 0x1(t-1)) + + ak-1(x(k-1)t
0x(k-1)(t-1)) + t
35
-
Les paramtres estims sont alors a1, a2, , ak-1 et a0= b0
(1-0) .
Etape 3 : restimation de A partir des nouveaux rsidus
destimation e1t nous recalculons une nouvelle valeur de soit 1
:
e1t = yt - a0- a1 x1t- ... - ak-1x(k-1)t
et 1 = t=2
T
e1t e1t-1
t=1
T
(e1t )2
Etape 4 : rgression sur les quasi-diffrences par la mthode des
MCO :
yt 1yt-1 = a0(1-1) + a1(x1t 1x1(t-1)) + + ak-1(x(k-1)t
1x(k-1)(t-1)) + t . Puis nous calculons un nouveau rsidu e2t partir
de la nouvelle estimation des coefficients, ce qui nous permet
dobtenir un 2. On ritre ainsi de suite lopration jusqu la stabilit
des coefficients estims. Remarque : La mthode des MCG ne permet de
traiter que lautocorrlation des erreurs dordre 1. Pour les
autocorrlations dun ordre suprieur, on rsout le problme en
utilisant les modles autorgressifs. V.3/ Htroscdasticit et MCG
Lorsque lon a une htroscdasticit des erreurs, on a Var(t) 2 t la
variance de lerreur nest plus constante. Le modle linaire va alors
scrire :
Y = Xa +
avec V = E( ) =
Var(1) Cov(1, 2) ... Cov(1, T)Cov(2, 1) Var(2) ... Cov(2, T)
... ...Cov(T, 1) ... Var(T)
=
2,1 0 ... 00 2,2 ... 0... ...0 ... 2,T
36
-
2 0 ... 0
0 2 ... 0... ...0 ... 2
= 2I .
On suppose que la variance de lerreur est lie aux valeurs de la
variable explicative x1i :
2,i = 2. x1i o i = 1,2,...,T. On a alors :
V = E( ) = 2
x11 0 ... 00 x12 ... 0... ...0 ... x1T
.
Lorsque lon utilise la mthode des MCO sur un modle qui comporte
de lhtroscdasticit, on a les mmes consquences quavec le modle
comportant une autocorrlation des erreurs, cest--dire : Lestimateur
= (XX)-1 XY est toujours sans biais : E() = a Lestimateur = (XX)-1
XY na plus la plus petite variance. On va donc utiliser la mthode
des MCG pour estimer le modle comportant une htroscdasticit. Il y a
deux faons dutiliser la mthode des MCG : 1/ On applique directement
la mthode des MCG au modle initial : On a le modle initial suivant
:
Y = Xa + avec E( ) = V 2I . Lestimateur des MCG scrit :
= (XV-1 X)-1 (XV-1 Y)
avec V = E( ) = 2
x11 0 ... 00 x12 ... 0... ...0 ... x1T
et V-1 = 1
2
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
37
-
2/ On transforme le modle originel et on applique la mthode des
MCO. On aboutit un rsultat quivalent celui donn en 1/. On recherche
une transformation matricielle P telle que le modle PY= PXa + P ait
une variance des erreurs qui est constante, cest--dire : E((P)( P))
= E(P P) = PE( )P = PVP = P
2 MP = 2 PMP = 2 P(P-1(P)-1)P
= 2 P(PP)-1P = 2 I. Dans ce cas, on peut estimer le modle par la
mthode des MCO :
= ((PX)PX)1(PX)PY = (XPPX)1XPPY. En comparant lestimateur des
MCO avec celui des MCG, on a :
V-1 = PP et V = 2 M = 2(PP)-1.
Or on a V = E( ) = 2
x11 0 ... 00 x12 ... 0... ...0 ... x1T
= 2 M = 2 (PP)-1
et V-1 = 1
2
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
= PP.
Similairement au cas de lautocorrlation des erreurs, on peut
crire galement V-1 =
1 2
PP.
On dduit alors :
P =
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
et P =
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
.
38
-
On peut transformer le modle de base en le multipliant par la
matrice P :
PY = PXa + P . On obtient alors :
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
y1y2:.
yT
=
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
1 x11 x21 x(k-1)11 x12 x22 ... x(k-1)2
: . : . :. : . :1 x1T x2T ... x(k-1)T
a0a1
:.
ak-1
+
1 x11 0 ... 0
0 1 x12
... 0
... ...
0 ... 1 x1T
12
:.T
Do
y1 x11
y2
x12:.
yT
x1T
=
1 x11
x11 x11
... x(k-1)1 x11
1 x12
x12
x12 ...
x(k-1)2 x12
: : : :1
x1T
x1T x1T
... x(k-1)T x1T
a0a1
:.
ak-1
+
1 x11
2 x12
:.
T x1T
.
Do lquation suivante :
yt x1t
= a0 1
x1t + a1
x1t x1t
+ a2 x2t
x1t + ... + ak-1
x(k-1) t x1t
+ t x1t
.
On remarque que Var
t
x1t = 1
x1t Var(t) = 1x1t
2,t = 1
x1t 2. x1t = 2 .
On peut donc appliquer la mthode des MCO directement sur le
modle transform pour trouver les valeurs des coefficients a0, a1,,
ak-1 (puisque le modle transform a ses erreurs qui sont
homoscdastiques).
39
-
VI/ LES MODELES DYNAMIQUES a) Modle autorgressif : On a vu que
lorsquil y avait oubli dune variable explicative importante dans le
modle de rgression, il y avait lapparition dune autocorrlation des
erreurs. On a vu galement que face une autocorrlation dordre 1, on
pouvait traiter le problme en utilisant la mthode destimation des
MCG. En prsence dune autocorrlation dordre suprieur, nous
estimerons le modle autorgressif suivant :
yt = b1yt-1 + b2yt-2 + + bhyt-h + b0 + t ou encore
yt = i=1
h
biyt-i + b0 + t
Dtermination du nombre de retards : Plusieurs critres possibles
: Critre de Akaike : On choisit le nombre h qui minimise la
fonction dAkaike qui est donne par :
AIC(h) = Ln
SCRh
T + 2h
T
avec SCRh = somme des carrs des rsidus pour le modle h retards ,
T = nombre dobservations , Ln = logarithme nprien. Critre de
Schwarz : On choisit le nombre h qui minimise la fonction de
Schwarz qui est donne par :
SC(h) = Ln
SCRh
T + h LnT
T .
Estimation du modle autorgressif : On constate ici que lhypothse
H2 qui stipule la non dpendance des variables explicatives avec
lerreur nest pas satisfaite car les variables yt-1, yt-2, , yt-h
dpendent de t-1 , t-2 ,, t-h . Les variables explicatives sont
alors alatoires et les estimateurs des MCO sont biaiss.
40
-
Cependant, ils peuvent tre asymptotiquement sans biais sil ny a
pas autocorrlation des erreurs. Sil y autocorrlation des erreurs,
nous pouvons utiliser la mthode destimation des MCG (pour une
autocorrlation dordre 1) et la mthode des variables instrumentales
(pour une autocorrlation dordre suprieur). Test dautocorrlation
dordre 1 : le h de Durbin : Soit le modle autorgressif suivant
:
yt = b1yt-1 + b0 + t . Lorsque lon a un modle autorgressif, le
test de Durbin et Watson est biais. Il faut dans ce cas utiliser la
statistique de test suivante :
h = T1 - Ts2
b1
o = 1 - DW2
(DW est la statistique de Durbin et Watson calcule partir du
modle
autorgressif) , T est le nombre dobservations et s2b
1
est la variance estime du coefficient
estim b1 du modle autorgressif. Cette statistique de test est
appele aussi le h de Durbin. Les hypothses du test sont :
H0 : h = 0 = 0 : pas d'autocorrlation des erreursH1 : h 0 0
La rgle de dcision est la suivante : Si | h | t/2 o t/2
reprsente la valeur critique de la loi normale pour un risque fix
on accepte H0 (indpendance des erreurs). On remarque que si Ts2
b1
1 , on ne peut pas calculer la statistique h. Dans ce cas, on
fait comme ci lhypothse la plus gnante taient ralise : lhypothse H1
avec autocorrlation des erreurs et on cherche estimer ensuite la
modle avec cette autocorrlation des erreurs. b) Modle autorgressif
retards chelonns : Si lautocorrlation des erreurs na pas disparu
avec le passage du modle statique au modle autorgressif, nous
pouvons utiliser le modle autorgressif retards chelonns qui scrit
:
yt = i=1
h
biyt-i + j=1
k
a1jx1(t-j) + p=1
n
a2px2(t - p) + + t
Ce modle comporte des retards sur la variable endogne et sur
toutes les variables exognes.
41
ECONOMETRIE (*)Hlne Hamisultane
I/ QUEST CE QUE LECONOMETRIE?II/ LE MODELE DE REGRESSION
SIMPLEIII/ LE MODELE DE REGRESSION MULTIPLEIV/ LES TESTS
V/ VIOLATION DES HYPOTHESESVI/ LES MODELES DYNAMIQUESVI.1/ Modle
autorgressif: critres de Akaike, Schwarz e
I/ QUEST CE QUE LECONOMETRIE?Figure 1: Revenu disponible et
Consommation des mnages au
II/ LE MODELE DE REGRESSION SIMPLEII.2/ Hypothses et proprits
des estimateurs des MCOII.3/ Critre de jugement de la qualit de
lajustement du
III/ LE MODELE DE REGRESSION MULTIPLEIII.2/ Hypothses et
proprits des estimateurs des MCOIII.3/ Critre de jugement de la
qualit de lajustement dTest de Box-Cox: (voir le doc. "pratique de
lconomtrie III.5/ Prvisions
IV/ LES TESTSIV.1/ Test de significativit dun coefficient: test
de StIV.5/ Test dhtroscdasticitV.3/ Htroscdasticit et MCG
VI/ LES MODELES DYNAMIQUES