Embed Size (px)
Citation preview
Ecole Nationale Supérieure des Mines de Saint-Etienne
Ecoulements polyphasiques(introduction)
Olivier BONNEFOYMail : [email protected]
Version : 0.50 du 13 février 2017Dernière version : ici
Version destinée aux étudiants.

Une mise à jour de ce document peut être téléchargée sur :www.emse.fr/~bonnefoy/Public/Polyphasique-EMSE.pdf
2
Introduction
Le présent document est un cours sur les écoulements polyphasiques donné aux étudiants de l'EcoleNationale Supérieure des Mines de Saint-Etienne. Il présente une vision microscopique du comportementdans un uide d'une particule isolée puis d'un ensemble de particules. Ces particules sont soumises à desforces hydrodynamiques et physico-chimiques. Les principaux types de modèles macroscopiques décrivantl'écoulement de suspension sont ensuite présentés.
Bonne lecture.
Olivier Bonnefoy
Nota Bene : le présent document comporte quelques modications et ajouts. Il peut évidemment comporter des
inexactitudes ou des erreurs. Merci de bien vouloir m'en avertir ([email protected]).
i

Introduction
ii

Table des matières
1 Dénitions 11.1 Distribution en taille . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Moments d'une distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Comportement individuel d'une particule 52.1 Forces agissant sur une particle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Force de gravitation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.2 Force de frottement visqueux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.1.3 Force de portance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.3.1 Eet Magnus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.3.2 Eet Samann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.4 Force de masse ajoutée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.1.5 Force de Basset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.6 Système en rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.7 Eet de paroi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.8 Somme des forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2 Exemple : sédimentation d'une particule isolée . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3 Nombre de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Comportement collectif des particules 193.1 Interaction hydrodynamique entre particules . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.1 Sédimentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1.1.1 Cas de deux particules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.1.1.2 Cas d'un grand nombre de particules . . . . . . . . . . . . . . . . . . . . . . 20
3.1.2 Viscosité dynamique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1.3 Perméabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Interaction physico-chimique entre particules . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2.1 Dénitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.2.2 Théorie DLVO statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.2.1 Forces attractives de Van der Waals . . . . . . . . . . . . . . . . . . . . . . . 243.2.2.2 Force répulsive de Pauli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.2.2.3 Force répulsive de double-couche électrique . . . . . . . . . . . . . . . . . . . 253.2.2.4 Stabilité de la suspension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Dynamique d'une population de grains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.3.1 Collisions provoquées par le mouvement brownien . . . . . . . . . . . . . . . . . . . . 293.3.2 Collisions provoquées par un écoulement cisaillé . . . . . . . . . . . . . . . . . . . . . . 31
4 Modélisation macroscopique des écoulements polyphasiques 334.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2 Notions de turbulence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2.1 Approche phénoménologique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2.2 Approche mathématique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Description des modèles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
iii

Introduction
4.3.1 Modèle Euler-Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.3.2 Modèle de mélange (ASM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5 Annexe 415.1 Nomenclature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.2 Dictionnaire . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.3 Unités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.4 Grandeurs physiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.5 Constantes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.6 Densités de distribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.7 Références bibliographiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Références bibliographiques 51
iv

Chapitre 1
Dénitions
Un système polyphasique est constitué d'une phase continue (gaz ou liquide) et d'une phase dis-persée composée de particules : solides (grains), liquide (gouttes) ou gaz (bulles). Ces particules sontdéformables ou indéformables, sphériques ou non. Le tableau 1.1 recense les diérents systèmes polypha-siques.
Phase disperséeGaz Liquide Solide
Phase continueGaz N/A Aérosol
Liquide Nuage de bulles Emulsion Suspension
Table 1.1 Dénomination des diérents systèmes polyphasiques.
En notant Vf le volume de la phase uide continue et Vp le volume de la phase particulaire dispersée, levolume total d'un système polyphasique s'écrit comme la somme de ces deux termes :
Vt ≡ Vf + Vp
Partant de là, on dénit couramment deux grandeurs : la porosité ε et la fraction volumique φ (en phasedispersée) :
ε ≡ VfVt
et φ ≡ VpVt
(1.1)
Naturellement, on a l'équation de fermeture ε+φ = 1. La concentration C en particules est égale au nombreN de particules divisé par le volume total Vt du système polyphasique :
C ≡ N
Vt(1.2)
1.1 Distribution en taille
L'ensemble des particules constitue une population. Si les particules sont sphériques, un seul paramètregéométrique les caractérise : leur rayon R (ou leur diamètre D). Dans la pratique, même si les particules nesont pas sphériques, on les considère comme telles.
De manière générale, la population sera caractérisée par sa densité de population, notée fN (R). Dansune unité de volume du système polyphasique, le nombre de particules dont le rayon est compris entre R etR + dR est égal à fN (R).dR. Par construction, l'aire sous la courbe de densité est égale à la concentrationC.
∞∫0
fN (R) .dR = C (1.3)
1

Chapitre 1. Dénitions
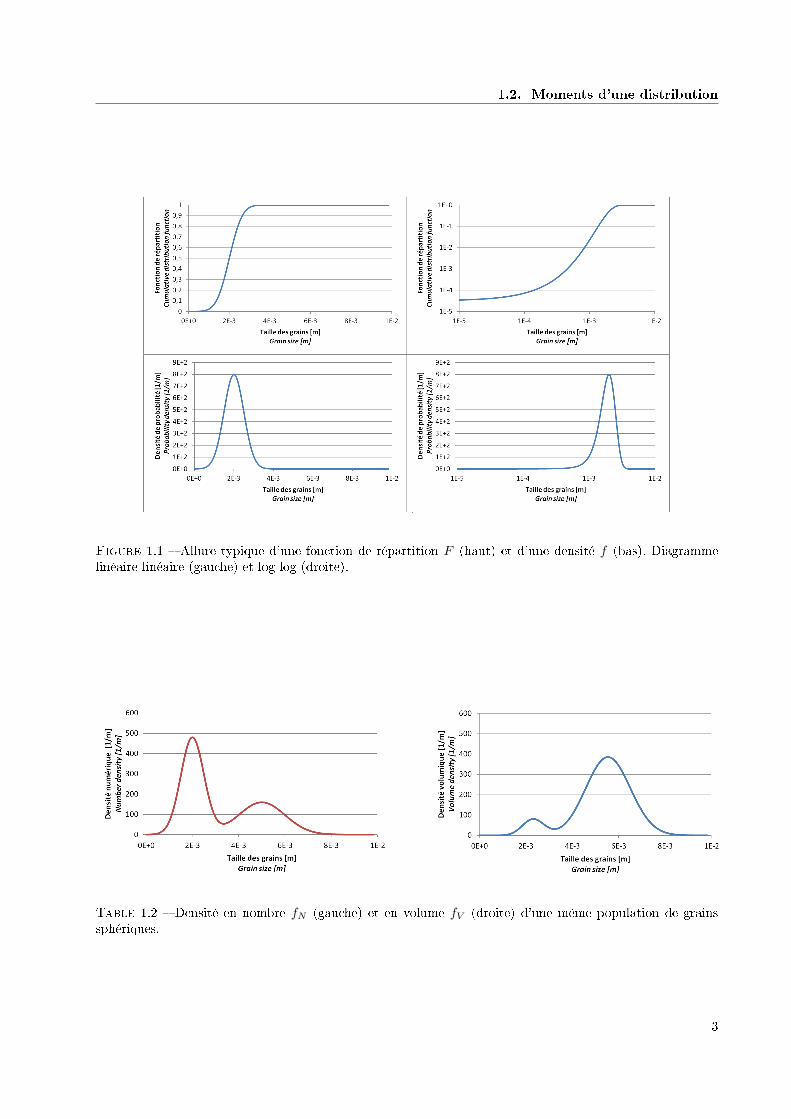
L'allure de la densité est donnée sur la gure 1.1. On peut également noter que la dimension de l'axedes abscisses est une longueur (exemple : µm) et que la dimension de l'axe des ordonnées est un nombredivisé par une longueur (exemple : µm−1). D'autres exemples de densité et l'expression analytique associéessont données en annexe (page 47). L'allure de la densité est liée au processus d'obtention de la populationde grains. Par exemple, une opération de broyage ou une synthèse de poudre par précipitation conduisentsouvent à une distribution log-normale. La distribution de Rosin-Rammler (=Weibull) est également fré-quemment rencontrées. Expérimentalement, il existe diérentes techniques pour caractériser une populationd'objets dispersés, chacune ayant des avantages et inconvénients, ainsi qu'une étendue de mesure spécique.Citons le tamisage, la sédimentométrie et la granulométrie Laser.
Si toutes les particules de la phase dispersée ont exactement la même taille, on parle de distribution deDirac. Si la distribution présente un pic unique et étroit (largeur à mi-hauteur inférieure à environ 20% de lataille moyenne), alors on parle de population monodisperse. Dans le cas contraire, on parle de populationpolydisperse.
En lieu et place de la densité fN , on peut décrire la population par la fonction de répartition FN .
FN (R) ≡R∫
0
fN (R) .dR (1.4)
Par construction, la fonction de répartition F (R) est strictement croissante sur l'intervalle [0;∞]et l'on aF (0) = 0 et F (∞) = C. Parfois, la densité est dénie par f/C et la fonction de répartition par F/C. Cettenormalisation permet d'écrire que F (∞) = 1. A titre d'illustration, le nombre de particules dont le rayon Rest compris entre R1 et R2 est égal à :
N(R1≤R≤R2) ≡ FN (R2)− FN (R1) (1.5)
Il existe d'autres représentations. Plutôt qu'au nombre N de particules, on peut s'intéresser à la surface Soerte par les objets dispersés ou bien leur volume V . La grandeur Z associée aux particules dont le rayonest compris entre R1 et R2 est liée à la densité en Z fZ par :
Z(R1≤R≤R2) ≡R2∫R1
fZ (R) .dR (1.6)
A titre d'illustration, pour une unité de volume du système polyphasique, le volume des particules dont le
rayon est compris entre R1 et R2 est égal àR2∫R1
fV (R) .dR. Il importe de bien préciser la dénition de la
densité utilisée. Pour une seule et même population de particules, les graphiques 1.2 permettent de voir qu'ily a beaucoup plus de petites particules (gros pic rouge centré sur 2 mm) mais qu'elles contribuent très peuau volume total (le pic bleu centré sur 2 mm est beaucoup plus petit que le pic bleu centré sur 5 mm).
1.2 Moments d'une distribution
De façon générale, on dénit les moments Mj de la densité de population fN (R) par la relation :
Mj ≡∫ ∞
0
fN (R).Rj .dR (1.7)
Le momentMj est homogène à une longueur élevée à la puissance j−3. De manière évidente, la concentrationtotale en particules C est égale au moment d'ordre 0 :
C = M0 (1.8)
2
1.2. Moments d'une distribution
Figure 1.1 Allure typique d'une fonction de répartition F (haut) et d'une densité f (bas). Diagrammelinéaire-linéaire (gauche) et log-log (droite).
Table 1.2 Densité en nombre fN (gauche) et en volume fV (droite) d'une même population de grainssphériques.
3

Chapitre 1. Dénitions
et la fraction volumique en phase dispersée φ est liée au moment d'ordre 3 par la relation :
φ =4π
3.M3 (1.9)
Le rayon moyen peut être déni à partir des moments. Ainsi, pour ce dernier la dénition la plus naturelleest 〈R〉 ≡ M1/M0. Cependant, les spécialistes du domaine utilisent plus volontiers le rayon moyen deSauter déni par :
〈R〉 ≡ M3
M2(1.10)
La connaissance de tous les moments Mj pour j ∈ 0, . . . ,∞, est équivalente à celle de la fonction fN (R).Pour des raisons pratiques, on se contentera souvent de réduire la connaissance de la densité de populationà celle de quelques moments. La plupart du temps, les quatre premiers moments (M0 à M3) peuvent sure.
Il est rare que la population de particules ne change pas avec le temps : celles-ci naissent ou disparaissent,croissent ou décroissent, se fragmentent ou s'associent pour former des particules plus grosses, de mêmeforme ou de forme diérente. La densité de population est donc en général également une fonction du tempsfN = fN (R, t).
Il est évident que la densité de population inue sur les propriétés physiques macroscopiques (massevolumique, viscosité eective,. . .) du système polyphasique. Par exemple, les propriétés rhéologiques d'uneémulsion ou d'une suspension sont directement reliées à la structure de la phase dispersée.
Dans le cas particulier où la forme des particules est indépendante de leur taille R, alors la surface S etle volume V peuvent s'écrire respectivement :
S(R) = kS .R2
V(R) = kV .R3 (1.11)
où kS et kV sont des constantes caractéristiques de la morphologie de la particule (kS = 4π et kV = 4π/3pour une sphère). Dans ce cas, on a les égalités suivantes :
fN (R) =fS(R)
kS .R2=fV (R)
kV .R3(1.12)
Dans le chapitre 2, nous allons examiner le comportement d'une particule isolée dans la phase continue. Lechapitre 3 s'intéressera au comportement d'un ensemble de particules. Le chapitre 4 propose les bases d'unemodélisation continue, valable à l'échelle d'un réacteur.
4

Chapitre 2
Comportement individuel d'une particule
2.1 Forces agissant sur une particle
Dans ce chapitre, nous allons traiter le cas d'une particule isolée, ou en tout cas éloignée d'autres par-ticules, immergée dans un uide. Pour calculer sa trajectoire, la méthode rigoureuse consiste à résoudre leséquations de Navier-Stokes et de continuité instationnaires avec les conditions aux limites appropriées pouren déduire la force que le uide exerce sur la particule. Cette approche est qualiée de Simulation NumériqueDirecte (DNS = Direct Numerical Simulation). Malheureusement, même pour une seule particule, le tempsde calcul est souvent prohibitif et une modélisation s'avère nécessaire. La plus simple consiste à décomposerla force totale en une somme de forces élémentaires dont on essaiera d'établir une expression approchée. Ledécoupage en plusieurs forces et leur additivité supposée est quelque peu articiel mais il donne de bonsrésultats dans un grand nombre de situations.
Figure 2.1 Forces agissant sur une particule
Les diérentes forces qui s'appliquent à une particule peuvent être recensées. Les forces à distance sontla force de gravitation ~FG, la force d'interaction électrique ~FE et la force d'interaction magnétique ~FM . Lesforces de contact qu'exerce le uide sur la particule sont la force de frottement visqueux ~FD, la force deportance ~FP , la force de masse ajoutée ~FMA et la force de Basset ~FB . Les deux dernières forces ne sontprésentes qu'en régime instationnaire c'est-à-dire lorsque la vitesse relative uide/particule évolue au coursdu temps. Le mouvement d'une particule dans un uide obéit au principe fondamental de la dynamique :
mp.d~Updt
=∑
~Fext avec mp ≡ ρp.π.d3
6(2.1)
Pour chacune des forces de contact, il n'y a pas d'équation générale mais seulement des expressions valablesdans un contexte bien précis. Les dicultés ont plusieurs origines :
5

Chapitre 2. Comportement individuel d'une particule
la géométrie de la particule. La simplication la plus courante consiste à la supposer sphérique, la stationnarité ou l'instationnarité de l'écoulement, la nature de l'écoulement à proximité de la particule.
Habituellement, on rencontre l'écoulement de Stokes (pour les particules sub-microniques et microniques dansun uide visqueux : Re < 1), l'écoulement potentiel (peu de frottement visqueux et Re ≈ 100), l'écoulementturbulent dans son régime inertiel ou visqueux (particules sub-millimétrique et millimétrique Re > 1000).A titre d'exemple, dans le domaine de la cristallisation-précipitation industrielle, le cas le plus fréquemmentrencontré est la particule sphérique dans un écoulement de Stokes instationnaire.
2.1.1 Force de gravitation
La force de pesanteur FG est la plus simple. Corrigée par la poussée d'Archimède, elle est égale à :
~FG ≡ (mp −mf ) .~g soit ~FG ≡ (ρp − ρf ) .V.~g (2.2)
avec g = 9, 81 m.s−2. Pour une sphère de diamètre d, son intensité est proportionnelle à d3.
2.1.2 Force de frottement visqueux
C'est la force de frottement qu'exerce le uide visqueux sur une particule en mouvement de translationstationnaire. C'est bien souvent la force la plus importante. Notons ~U la vitesse relative entre uide etparticule et U sa norme :
~U ≡ ~Up − ~Uf avec U ≡∥∥∥~U∥∥∥ (2.3)
La force de frottement visqueux ~FD1, appelée également force de traînée, s'oppose au mouvement de
la particule dans le uide. En utilisant l'analyse dimensionnelle, on peut montrer que la force ~FD peut semettre sous la forme :
~FD = −FD.~U
Uavec FD ≡ CD.
(1
2.ρf .U
2
).S (2.4)
où S désigne la surface projetée sur un plan orthogonal à la direction de l'écoulement. Cette expression faitapparaître le coecient de traînée CD. Ce coecient sans dimension est fonction du nombre de Reynoldsrelatif à la particule Rep appelé encore nombre de Reynolds particulaire :
Rep ≡ρf .U.d
µf(2.5)
où ρf et µf désignent la masse volumique et la viscosité dynamique du uide, d la taille caractéristiquede la particule. Pour une sphère, la relation CD = CD (Rep) est représentée graphiquement sur la gure2.2. Quelques corrélations empiriques, valables par morceau, sont données dans le tableau 2.1, avec uneprécision de l'ordre de 5%, sauf pour celle d'Allen qui, malgré le mérite d'être siple peut conduire à uneerreur de 70 %. La corrélation de Clift, Weber & Grace [1] est valable sur tout le domaine avec une bonneprécision (quelques pourcents seulement). Ses équations sont détaillées sur la gure 2.3. Une description desphénomènes physiques en jeu et leur inuence sur l'allure de la courbe CD = CD (Rep) est proposée enannexe (page ??).Dans le domaine de Stokes, on montre facilement que la force de frottement visqueux s'exerçant sur unesphère a sa norme égale à :
~FD,Stokes ≡ −3π.µf .d.~U (2.6)
Cette expression a été étendue vers des nombres de Reynolds légèrement plus élevés par Oseen [4] :
~FD,Stokes-Oseen ≡ −3πµf .d.
(1 +
3
16.Re
).~U (2.7)
Parfois, on désigne par facteur de friction la grandeur f ≡ 3π.µf .d.
1. L'indice D fait référence à "Drag", la traduction anglaise de "Traînée".
6

2.1. Forces agissant sur une particle
Figure 2.2 Coecient de frottement CD pour une sphère lisse [2].
Domaine Limites Expression de CDStokes 10−4 < Rep < 1 24
Rep
Allen (tourbillons) 1 < Rep < 800 18,5
Re0,6p
Schiller & Nauman [3] 1 < Rep < 103 24Rep
.(1 + 0, 15.Re0,687
p
)Newton (sillages) 103 < Rep < 5.105 0, 44
Table 2.1 Coecient de traînée CD pour une sphère.
La dynamique d'une goutte dans l'air ambiant est inspirée de celle d'une sphère solide. Pour une goutte,il faut tenir compte du mouvement interne du liquide dans la goutte. Comme la condition de non-glissementà l'interface est remplacée par un glissement partiel, le coecient de frottement d'une goutte sphérique estinférieur à celui d'une sphère solide plongée dans un uide. L'expression de CD est :
CD =
27.Re−0,84
p pour Re < 800, 27.Re−0,217
p pour Re > 80(2.8)
7

Chapitre 2. Comportement individuel d'une particule112 5. Spheres at Higher Reynolds Numbers
Table 5.2 gives a new correlation, based on a critical examination of available data for spheres (N6). Results in which wall effects, compressibility effects, noncontinuum effects: support interference, etc. are significant ha^-e been ex- cluded. The whole range of Re has been divided into 10 subintervals, with a distinct correlation for each interval. Adjacent equations for C , match within 1% at the boundaries between subintervals, but the piecewise fit shows slight gradient discontinuities there. The Re = 20 boundary corresponds to onset of wake formation as discussed above, the remaining boundaries being chosen for convenience.
For Re < 0.01, the Oseen result is reliable (see Chapter 3). Equation B was originally proposed by Beard (B7) as a fit to two specific sets of data (B5, P8)
TABLE 5 . 2 " ~ ~
Recommended Drag Correlations: Standard Drag Curve. iv = log,, Re
Range Correlation
(A) Re < 001 C D = 3 16 + 2 4 Re
(B) 0 01 < Re I 20 log lo[^ - I] = -0 881 + 0 8211 - 0 05it2
24 I e , C, = - [I + 0 1315 Rei0 8 2 O O"')
Re I
(D) 260 5 Re I 1500 log,,C, = 1.6435 - 1.12421~ + 0 . 1 5 5 8 ~ ~
(E) 1.5 x lo3 $ Re I 1.2 x lo4 log,, C, = -2.4571 + 2.555811, - 0.9295ic2 + 0 . 1 0 4 9 ~ ~
(F) 1.2 10% R~ < 4.4 lo4 log,, C, = - 1.9181 + 0.6370~' - 0.0636~ '
(G) 4.4 x lo4 < Re I 3.38 x 10' log,, C, = -4.3390 + 1 . 5 8 0 9 ~ - 0.15461c2
(H) 3.38 x lo5 < Re I 4 x lo' C, = 29.78 - 5 . 3 ~
(I) 4 x lo5 < Re I 10' C, = 0 . 1 ~ - 0.49
(J) lo6 < Re C,, = 0.19 - 8 x lo4 Re
" Sources of data: Achenbach (A3); Arnold (A7); Bailey and Hiatt (B1); Beard and Pruppacher (B5); D a ~ i e s (D2): Dennis and Walker (D3); Goin and Lawrence (G9); Goldburg and Florsheim (G10): Gunn and Kinzer (G14): Hoerner (H14); Ihme er ill. (11): LeClair (L5); Liebster (L12); Masliyah (M2); Maxworthy (M7, M8); Millikan and Klein (M10); Moller (M11): Pettyjohn and Christiansen (P4); Pruppacher and Steinberger (P8); Rafique (Rl ) ; Rimon and Cheng (R8): Roos and Willmarth (R10); Schmiedel (S2); Shakespear (S9); Vlajinac and Covert (V3); Wieselsberger (W4); Woo (W9).
Number of data points: C-149: D-74; E-61; F-52: G-142.
Figure 2.3 Jeu d'équations de Clift, Weber & Grace [1] pour le coecient de traînée d'une sphère lisse.La variable w est égale à Log10 (Re).
8

2.1. Forces agissant sur une particle
116 5 . Spheres at Higher Reynolds Numbers
from a very large value to nearly unity. In supercritical flow, horizontal motion is more marked, with erratic changes of speed and direction rather than periodic motion (MI, M14, S4, S5. W6). resulting from the fluctuating lift noted in section 2. Secondary motion is more important for nonspherical and fluid particles, and is discussed further in Chapters 6 and 7.
Figure 5.14 shows terminal velocities of spheres of various densities in air and water at 20 C calculated from the correlations in Tables 5.2 and 5.3, incorporating corrections for secondary motion, Eq. (5-18), and slip (see Chapter 10).
10pm 100pm lmm 1 cm
DIAMETER, d
FIG. 5.14 Terminal velocities of spheres in air and uater at 20°C
1. LVtimerical Solutions
For axisymmetric flow the species continuity equation, Eq. (1-38), written in terms of the dimensionless concentration $ and stream function Y (see Chapter 1) is
Figure 2.4 Vitesse terminale de chute d'une sphère dans l'air ou l'eau à 20°C [1].
9

Chapitre 2. Comportement individuel d'une particule
2.1.3 Force de portance
Les situations précédentes sont relatives à une particule subissant uniquement une translation. Qu'enest-il si la particule est également en rotation ou placée dans un écoulement cisaillé (près d'une paroi oudans un tourbillon) ? Il apparaît alors une force latérale, orthogonale à la direction de la vitesse relative, dite
force de portance et notée ~FL2.
La force de portance totale est la somme de plusieurs contributions dont les plus importantes sont :
l'eet Magnus, pour une particule en rotation (section 2.1.3.1) l'eet Saman, pour une particule dans un écoulement cisaillé (section 2.1.3.2) l'eet de paroi, pour une particule proche d'une paroi (section 2.1.7) l'eet 'Velocity/Pressure dierence' 3
2.1.3.1 Eet Magnus
Une particule en translation et en rotation dans un uide au repos subit une force de portance que l'onappelle force de Magnus . Deux explications sont fréquemment avancées pour décrire qualitativementl'origine de cette force.
L'interprétation classique de ce phénomène fait intervenir le théorème de Bernoulli (1739) qui stipuleque la somme v2/2 + gz + p/ρ est une constante le long d'une ligne de courant pour un uide parfait,incompressible et irrotationnel. Appliqué au cas d'une grosse particule dans un gaz, la pression est plusélevée à l'endroit où la vitesse relative uide-solide est la plus faible (en bas sur la gure). Ceci conduit àune diérence de pression et donc à une force dirigée vers le haut (voir gure ??). Du fait de sa simplicité,cette interprétation rencontre un grand succès et est fréquemment citée dans la littérature. Elle est toutefoisfausse. En eet, l'hypothèse d'un uide parfait est associée à une viscosité nulle. Par conséquent, il n'y apas d'adhérence du uide à la paroi mais un glissement total. La vitesse du uide n'est donc pas impactéepar la rotation du solide et le théorème de Bernoulli ne conduit à rien d'intéressant. Cette erreur est ancréedans l'histoire, comme en atteste le paradoxe de d'Alembert établi dans le cas (plus simple) d'un objet entranslation simple dans un uide (voir section ??).
L'interprétation moderne est plus robuste car elle s'applique également aux uides visqueux. Elle faitintervenir la notion de couche limite développée par Prandtl en 1904 (voir section ??). Comme l'illustrela gure 2.2, la séparation de la couche limite (laminaire ou turbulennte) est plus tardive sur le côté oùla vitesse relative uide-solide est plus faible. En conséquence, le uide est dévié vers le côté où la vitesserelative est élevée et, par le principe d'action-réaction, la particule subit une force dirigée vers le côté où lavitesse relative est minimale.
Lorsque le nombre de Reynolds est faible (exemple : petite particule suspendue dans un liquide ; contre-exemple : une balle de base-ball), Rubinow et Keller [5] ont établi l'expression analytique de la force et du
couple qui s'exercent sur une sphère. Pour une vitesse ~U et une vitesse angulaire ω 4, la force totale est lasomme de la force de traînée de Stokes-Oseen (équation 2.7) et d'une force de portance ~FL ortogonale àla vitesse. Les auteurs indiquent : "Il est intéressant de noter qu'au premier ordre (pour un faible nombrede Reynolds), la force de portance est indépendante de la viscosité µf et se rapproche de l'expression de laportance pour un écoulement potentiel en 2D autour d'un prol d'aile d'avion" 5.
Rubinow-Keller :
~FL ≈ π
8 ρf .d3.~ω ∧ ~U
~T ≈ −πµf .d3.~ω(2.9)
2. L'indice L fait référence à "Lift", la traduction anglaise de "Portance".3. Terminologie qui me paraît encore obscure. Sans doute liée aux écoulements potentiels de uides parfaits . . .
4. La vitesse angulaire ~ω d'une sphère de rayon r en rotation est telle que la vitesse périphérique de la sphère est∥∥∥~Upériph
∥∥∥ =
r. ‖~ω‖. Elle est par ailleurs égale à la moitié du rotationnel du champ de vitesse : ~ω = 12
−→rot ~U .
5. A compléter ...
10

2.1. Forces agissant sur une particle
Table 2.2 Ecoulement autour d'une sphère en rotation. Le uide est dévié et la force de portance deMagnus pointe dans la direction opposée, vers l'endroit où la vitesse relative uide-solide est la plus faible.
Figure 2.5 Vidéo - Magnus au basket [6]. Figure 2.6 Vidéo - Magnus au foot [7].
11

Chapitre 2. Comportement individuel d'une particule
Figure 2.7 Force de Saman.
Figure 2.8 Vidéo - Perforation d'une plaque polystyrène [8].
2.1.3.2 Eet Samann
Une particule se déplaçant dans un écoulement cisaillé subit également une force de portance. La vitesse derotation ω d'une particule sphérique portée par le uide est égale à la moitié de la vitesse de cisaillement 6
locale γ. On a alors :
FL ≡ ρf .πd3
16.U.γ (2.10)
Cette force varie proportionnellement à d3 et devient donc prépondérante (ou tout du moins non négligeable)pour de grandes particules. Pour de petites particules dans un écoulement cisaillé, la portance est donnéepar Saman :
FL ≡ 1, 615.ρf .ν1/2f .d2.U.γ1/2 (2.11)
Cette expression tient compte de l'eet de l'inertie dans l'écoulement visqueux autour de la particule.
2.1.4 Force de masse ajoutée
Cette force notée ~FMA n'est présente qu'en régime instationnaire. Elle se manifeste dans les expériencessuivantes :
Considérons tout d'abord le cas d'un uide au repos dans lequel se déplace une particule à vitesseconstante Up. La particule transfert au uide de l'énergie cinétique :
Ec =
∫∫∫Vtot
1
2.ρf .U
2f .dV (2.12)
où U2f =
∑3i=1 U
2f,i avec Uf,i la composante selon la direction i de la vitesse du uide ~Uf . L'intégration est
eectuée sur le volume total de uide Vtot. Toutefois, en pratique, l'inuence d'une particule ne se fait sentir
6. La "vitesse de cisaillement" γ est encore appelée "cisaillement" ou bien "vitesse de déformation". Voir la note 4 pourétablir la relation ω = γ/2.
12

2.1. Forces agissant sur une particle
que sur une distance nie, de l'ordre de quelques dizaines de diamètres. Pour faire apparaître la vitesse dela particule (qui est la cause de ce transfert d'énergie) dans l'expression 2.12, on peut écrire :
Ec =1
2.ρf .I.U
2p (2.13)
où I est une grandeur homogène à un volume, dénie par :
I ≡∫∫∫Vtot
U2f
U2p
.dV (2.14)
Si la vitesse de la particule varie, on peut diérentier l'équation 2.13 pour écrire :
dEcdt
= ρf .I.Up.dUpdt
(2.15)
La variation d'énergie cinétique du uide est homogène à une puissance. Elle peut donc se mettre sous laforme du produit d'une force Fp/f (que la particule exerce sur le uide) par la vitesse de la particule :
dEcdt≡ Fp/f .Up (2.16)
On en déduit que :
Fp/f = ρf .I.dUpdt
(2.17)
Le terme ρf .I est homogène à une masse et porte le nom de masse ajoutée :
MA ≡ ρf .I (2.18)
La traînée additionnelle FMA qu'exerce le uide sur la particule est l'opposée de la force Fp/f que la particuleexerce sur le uide :
FMA ≡ −MA.dUpdt
(2.19)
La diculté réside dans le calcul de I. Dans le cas d'une particule sphérique et d'un écoulement potentiel 7,on peut utiliser un bilan de quantité de mouvement et la relation 2.17 pour obtenir :
I =V
2(2.20)
Ce qui précède a été développé pour une particule se déplaçant dans un uide au repos. Dans le cas général,le uide est également en mouvement et la traînée additionnelle s'exprime par :
FMA = −MA.d (Up − Uf )
dt+ ρf .V.
dUfdt
(2.21)
Le terme de droite vient de la pression additionnelle s'exerçant sur la particule due à l'accélération du uide.Les anglo-saxons le désignent par le terme "pressure stress".
Pour résumer, la force de masse ajoutée apparaît lorsque la vitesse relative d'un corps dans un uidechange. Elle s'oppose toujours au mouvement : l'accélération et la décélération sont rendues plus lentes. Lamasse eective (ou masse virtuelle) de l'objet est égale à la somme de la masse réelle et de la masseajoutée :
me ≡ mréelle +majoutée
7. On parle d'écoulement potentiel lorsqu'il existe une fonction scalaire ϕ, appelée potentiel des vitesses, telle que lavitesse macroscopique du uide soit le gradient de cette fonction : ~u = ∇ϕ. Ce modèle décrit raisonnablement bien les uidesdans les zones où le rotationnel de la vitesse est nul (ex : écoulement d'un uide parfait). En revanche, il n'est pas adaptépour traiter les couches limites ou les sillages. Lorsque le uide est incompressible, alors le Laplacien du potentiel de vitesse estidentiquement nul : ∆ϕ = 0.
13

Chapitre 2. Comportement individuel d'une particule
L'équation 2.20 montre que, pour une sphère dans un écoulement potentiel, la masse ajoutée est égale à lamoitié de la masse du uide déplacée. Cela donne une indication de son intensité : cette force sera négligeablesi un objet liquide ou solide accélère ou décélère dans un gaz (gouttes de pluie, avion, . . .) ; en revanche,si la masse volumique du uide est comparable ou supérieure à celle du solide (bulle de gaz ou solide dansliquide), il conviendra de la prendre en compte sous peine de faire une erreur potentiellement importante.A titre d'exemple, pour une bulle d'air sphérique dans l'eau liquide, la masse ajoutée est environ 400 foissupérieure à la masse réelle (à retrouver à titre d'exercice). Cette force est également non négligeable dansl'hydrodynamique navale (vagues sur bateau). Autres exemples : une balle de fusil impactant la surface dela mer, le lancement d'un missile balistique depuis un sous-marin, le mouvement d'un pendule immergé, . . .
2.1.5 Force de Basset
Une force supplémentaire apparaît lorsque l'écoulement est instationnaire et que la viscosité du uiden'est pas négligeable. Cette force apparaît typiquement dans les situations suivantes :
sédimentation d'une particule initialement au repos dans un uide au repos (la vitesse relative aug-mente jusqu'à atteindre une valeur asymptotique)
mouvement d'une particule initialement en mouvement sous l'eet du frottement visqueux (la vitesserelative diminue jsuqu'à s'annuler)
mouvement d'une particule subissant une force externe oscillante (la vitesse relative augmente puisdiminue alternativement)
La force de Basset rend compte de l'inertie de la couche limite visqueuse qui ne s'ajuste qu'avec retardà une nouvelle condition cinématique (la vitesse relative évolue) et freine donc la particule. Son expressionfait donc logiquement apparaître la masse volumique ρf du uide (contribution inertielle) et sa viscositédynamique µf (contribution visqueuse). Elle fait également apparaître une intégrale sur le temps (depuisle début de l'expérience jusqu'à l'instant t considéré). Pour cette raison, la force de Basset est égalementappelée history force. Pour une particule sphérique de diamètre dp, l'expression s'énonce :
FB ≡ −3
2.d2p.√π.µf .ρf
∫ t
t0
d (Up − Uf )
dt′.
dt′√t− t′
(2.22)
Les paramètres qui déterminent l'importance relative de cette force sont notamment les uctuations tem-porelles de vitesse, la diérence de masse volumique entre la particule et le uide et le nombre de Reynolds[9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19].
2.1.6 Système en rotation
Si la suspension est contenue dans un récipient en rotation (avec la vitesse angulaire ~Ω), il est judicieuxd'étudier le mouvement des particules dans le repère tournant. Il convient alors d'ajouter les termes de forcecentrifuge et de force de Coriolis pour les équations décrivant le uide et les particules. L'équation deNavier-Stokes devient alors :
ρf∂Uf∂t
= · · · − 2.ρf ~Ω× ~Uf − ρf ~Ω×(~Ω× ~r
)(2.23)
et l'équation du mouvement de la particule devient :
ρp∂Up∂t
= · · · − 2.~Ω×(ρp.~Up − ρf .~Uf
)− (ρp − ρf ) ~Ω×
(~Ω× ~r
)(2.24)
2.1.7 Eet de paroi
Traînée et portance sont modiées quand la particule se déplace près d'une paroi. La condition de nonglissement sur une paroi immobile, ce qui est le cas le plus courant, se traduit par une vitesse du uide nulle.Nous nous attendons donc à des vitesses de particule et donc des nombres de Reynolds faibles (Re < 1).
Nous distinguerons diérentes situations (la paroi sera supposée plane) :
14

2.2. Exemple : sédimentation d'une particule isolée
particule se déplaçant parallèlement à la paroi (gure Xa) particule se déplaçant perpendiculairement à la paroi (gure Xb) particule en rotation près de la paroi (gure Xc) particule xe dans le champ de cisaillement proche de la paroi (gure Xd)
Dans ces schémas, la distance h représente la plus courte distance entre les deux solides (particule et paroi).On gardera à l'esprit que la présence de la paroi :
augmente toujours la résistance hydrodynamique. Cette augmentation est caractérisée par la fonctionG dénie par la relation suivante et qui prendra des valeurs supérieures à l'unité :
G ≡ FDFD,Stokes
(2.25)
où la force FD,Stokes a été dénie par la relation 2.6 en page 6 avec un eet sensible que si h < d
2 induit l'existence d'un moment sur la particule, qui n'est pas forcément présent loin de la paroi.
Goldman a proposé les expressions suivantes de la fonction G (h) (valable seulement si h d2 ) pour les
diérentes situations :
Cas a :
FD,x = 3πµf .d. (Uf − Up)x .
[815 . ln
(d2h
)+ 0, 96
]MD,y = 2πµf .d
2. (Uf − Up)x .[
110 . ln
(d2h
)− 0, 19
] (2.26)
Cas b :
FD,z = 3πµf .d. (Uf − Up)z .
[d2h
]MD,y = 0
(2.27)
Cas c :
FD,x = 3
2πµf .d2.Ωy.
[215 . ln
(d2h
)− 0, 253
]MD,y = −πµf .d3.Ωy.
[25 . ln
(d2h
)+ 0, 38
] (2.28)
Cas d :
FD,x = 1, 7. 32πµf .d
2.γMD,y = 0, 944. 12πµf .d
3.γ(2.29)
Le cas d est complexe à écrire dans sa forme générale. Les deux expressions données dans l'équation 2.29correspondent au cas particulier où la particule repose sur la paroi.
L'eet des parois sur la portance a été moins étudié. Leighton et Acrivos ont proposé :
FL = 0, 576.ρf .d4.γ2 (2.30)
Cette expression est à rapprocher de l'équation 2.10 en prenant U = γ.d/2.
2.1.8 Somme des forces
Le mouvement d'une particule sphérique dans un uide (dont l'écoulement est potentiel) obéira au prin-cipe fondamental de la dynamique :
ρp.V.dUpdt
= FG + FD + FL + FMA + FB (2.31)
où les diérentes forces sont la gravité FG (équation 2.2), la traînée visqueuse FD (équation 2.4), la force deportance FL (section 2.1.3), la force de masse ajoutée FMA (équation 2.21) et la force de Basset FB (équation2.22).
2.2 Exemple : sédimentation d'une particule isolée
Nous appliquerons ces résultats à la sédimentation d'une particule dans un liquide au repos, ou bien departicules constituant une suspension susamment diluée pour négliger les interactions particule-particule.On considère une particule sphérique de masse volumique ρp tombant librement dans un uide immobile de
15

Chapitre 2. Comportement individuel d'une particule
masse volumique ρf . Elle est soumise à la force de gravité FG (corrigée de la poussée d'Archimède) et à laforce de traînée visqueuse FD. L'équation du mouvement régissant le phénomène s'écrit :
mp.dUpdt
= FG − FD (2.32)
ou bien, de manière explicite, en utilisant l'expression de FD (équation 2.4 en page 6) :
π.d3
6.ρp.
dUpdt
=π.d3
6.g. (ρp − ρf )− CD.
π.d2
4.ρf .U
2p
2(2.33)
ce qui peut aussi s'écrire :
dUpdt
= g.ρp − ρfρp
− f (Up) avec f (Up) ≡ρfρp.3CD4d
.U2p (2.34)
Cette équation diérentielle est non linéaire pour deux raisons : la vitesse Up est élevée au carré et lecoecient CD dépend de la vitesse Up. Elle ne connaît pas de solution analytique. Toutefois, on constateaisément que la vitesse converge vers une valeur asymptotique U∞ appelée vitesse terminale de chuteobtenue pour
dUpdt = 0. Elle correspond à la vitesse acquise par la particule en milieu tranquille lorsque la
force de frottement visqueux est égale au poids apparent de la particule.
U∞ ≡
√4gd
3CD.ρp − ρfρf
(2.35)
où l'on notera que le coecient de traînée CD dépend de la vitesse terminale U∞ par l'intermédiaire dunombre de Reynolds (ici égal à ρf .U∞.d/µf ). La durée caractéristique τ du phénomène transitoire (passagede Up = 0 à Up = U∞ sous l'eet de l'accélération de la pesanteur) est donnée en ne considérant que lepremier terme du membre de droite (car la gravité est la force motrice et f tend vers 0 lorsque Up est trèsfaible). On établit ainsi que la particule atteint sa vitesse limite en un temps habituellement très bref donnépar la relation :
τ ≡ ρpρp − ρf
.U∞g
(2.36)
Ce temps caractéristique est peu modié par les forces de masse ajoutée. Par souci de complétude, signalonsqu'on dénit parfois le nombre d'Archimède Ar par la relation :
Ar ≡ g.d3
ν2f
.ρp − ρfρf
(2.37)
On a alors la relation suivante entre nombres adimensionnés :
Ar =3CD
4.Re2∞ avec Re∞ ≡
U∞.d
νf(2.38)
2.3 Nombre de Stokes
Le nombre de Stokes est un nombre adimensionné permettant d'évaluer l'importance relative de la forceinertielle et de la force de dissipation visqueuse. Il est déni comme le ratio de deux durées caractéristiques :
St ≡ τvisqueuxτinertie
(2.39)
Le temps τvisqueux est le temps de relaxation visqueux, c'est-à-dire la durée caractéristique de la décroissanceexponentielle de la vitesse d'une particule soumise à un frottement visqueux. On a vu dans la section 2.1.2 quecette durée dépendait du régime hydrodynamique. Si l'on place dans le cas d'un faible nombre de Reynolds,alors la force de traînée est donnée par l'équation 2.6 et le temps visqueux est 8 :
τvisqueux ≡ρp.d
2
18.µf(2.40)
8. Partant de F = m.dv/dt et F = −3π.µf .d.U , on voit que la vitesse décroît exponentiellement avec le temps. La constantede temps est égale à τvisqueux.
16

2.3. Nombre de Stokes
Le temps τinertie est la durée caractéristique de l'inertie. Si les forces freinantes sont négligeables et que laparticule est entraînée à la même vitesse Uf que le uide, elle parcourt une distance égale à son diamètre enun temps :
τinertie ≡d
Uf(2.41)
Par conséquent, le nombre de Stokes est égal à :
St =ρp.d.Uf18.µf
(2.42)
Comme l'illustre la gure 2.9, on distingue deux régimes : le régime visqueux (St 1) : les particules suivent les lignes de courant du uide et, comme lui,
coutournent les obstacles. Exemple : poussière incorporée dans du miel. Pour la PIV 9, un nombrede Stokes inférieur à 0,1 garantit une erreur relative sur les vitesses inférieure à 1%.
le régime inertiel (St 1) : les particules sont entraînées par leur inertie et leur trajectoire n'estque peu inuencée par le mouvement du uide environnant. Elles se détachent facilement des lignesde courant lorsque celles-ci changent de direction. Les particules entrent en collision avec d'autresparticules, des obstacles ou bien les parois des conduites coudées (abrasion). Exemple : boule depétanque dans l'air.
Figure 2.9 Régime visqueux (St 1) et régime inertiel (St 1).
Inuence sur le choix du modèle décrivant le comportement de la suspension (à améliorer).Dans le régime visqueux, seule la résolution des équations de Navier-Stokes pour le uide porteur est néces-saire (en tout cas, tant que la fraction volumique en phase dispersée reste susamment faible pour que les
9. La PIV (Particle Image Velocimetry) est une technique expérimentale pour mesurer les champs de vitesse dans unuide en écoulement. Elle consiste à ensemencer le uide avec des particules-traceurs qui pourront être observées par caméraultra-rapide.
Figure 2.10 Vidéo - Principe de la séparationinertielle [20].
Figure 2.11 Vidéo - Détection de la malaria[21].
17
Chapitre 2. Comportement individuel d'une particule
particules ne se touchent pas les unes les autres). Les particules sont simplement convectées par le uide, àla même vitesse que ce dernier. On parle alors de couplage unidirectionnel (one-way coupling en anglais).Dans le régime inertiel, il est nécessaire de calculer la trajectoire de chacune des particules. Le mouvementdu uide sera tout de même aecté par celui des particules. On parle de two-way coupling.
18

Chapitre 3
Comportement collectif des particules
Le comportement d'une suspension est plus complexe à décrire car les particules interagissent entre ellesde plusieurs manières :
les interactions de contact (solide-solide) les interactions hydrodynamiques (solide-uide-solide) les interactions physico-chimiques (solide-uide-solide)
Les interactions de contact interviennent essentiellement dans le cas des suspensions très concentrées où lesparticules entrent fréquemment en collision les unes avec les autres et/ou restent en contact sur de longuesdurées. Elles ne seront pas traitées dans le cadre de ce cours qui se focalisera sur les deux autres interactionsqui s'exercent à distance.
3.1 Interaction hydrodynamique entre particules
3.1.1 Sédimentation
3.1.1.1 Cas de deux particules
Lorsque deux sphères, initialement au repos et disposée l'une au dessus de l'autre, tombent par gravitédans un uide, on observe un mouvement instationnaire. La particule la plus haute est entraînée dans lesillage de la plus basse et s'en rapproche (draft) jusqu'à entrer en contact avec elle (kiss). Cela conduit à undoublet de sphères aligné verticalement, qui n'est pas stable. On observe alors une rotation (tumble=chute,culbute) au cours de laquelle le uide s'insère entre les deux particules et les sépare. A noter que, par erreur,le mot "draft" est couramment remplacé par "drift" (dérive en anglais).
Figure 3.1 Draft-Kiss-Tumble.
Figure 3.2 Vidéo -Mouvement "Draft-Kiss-Tumble" [22].
Figure 3.3 Vidéo -Sédimentation d'un es-saim [23].
19

Chapitre 3. Comportement collectif des particules
Figure 3.4 Drainage du lm liquide.Figure 3.5 Viscosimètre à billetombante.
3.1.1.2 Cas d'un grand nombre de particules
Nous allons étudier l'exemple de la sédimentation d'un ensemble de particules, que l'on appelle parfoisun essaim de particules. Nous ferons l'hypothèse qu'il n'existe pas d'interaction physico-chimique entreelles. La suspension est caractérisée par sa densité de population ou par ses moments, et au premier chef parsa fraction volumique.
On trouve dans la littérature de nombreuses études expérimentales montrant que la vitesse de sédimen-tation d'une particule dans un milieu de fraction volumique non nulle est généralement plus faible que celleobtenue pour une particule seule en milieu tranquille. On montre que la vitesse de sédimentation d'une parti-cule entourée d'autres particules dépend de la fraction volumique en solide par l'intermédiaire d'interactionshydrodynamiques. Derrière le terme interaction hydrodynamique se cachent plusieurs phénomènes :
en sédimentant, une particule doit remplacer son équivalent en liquide, qui aura une vitesse ascendantenon nulle en milieu conné. Le frottement entre la particule et le liquide en sera d'autant plus élevé(vidéo 3.3),
en sédimentant, la particule chasse (draine) l'eau connée devant elle ; cette couche d'eau est d'autantplus dicile à évacuer qu'elle est mince 1.
Figure 3.6 Sketch of the four eects which retard lm drainage resulting from the presence of a surfactantadsorbed at the interface. (1) Electrostatic repulsion ; (2) Steric repulsion ; (3) Electroviscous eect ; (4)Increase of the interfacial viscosity.
Devant la complexité de l'hydrodynamique multiparticulaire, les premières études ont d'abord été ef-fectuées en milieu dilué et pour des systèmes monodisperses, voir bidisperses. Encore aujourd'hui, peu dedonnées existent dans la littérature aussi bien en milieu concentré que pour des systèmes polydisperses.
Les relations donnant la vitesse terminale de chute pour des suspensions monodisperses sont de deux
1. On peut noter l'existence de viscosimètre à bille, un peu rustique, dont le principe est le suivant : un liquide inconnuremplit un cylindre thermostaté dans lequel chute une bille calibrée. La durée de chute dépend de la (faible) diérence dediamètre bille/cylindre et, bien sûr, de la viscosité du liquide.
20

3.1. Interaction hydrodynamique entre particules
types : les corrélations empiriques et les équations reposant sur un fondement théorique. On lie la vitesseterminale de chute aux moments de la densité de population et, en particulier, à la fraction volumique dela suspension. La loi la plus fréquemment utilisée est donnée par Richardson et Zaki (1954). Elle est valablepour une fraction volumique φ de la phase dispersée inférieure à 53-54%.
U∞ (φ)
U∞ (φ = 0)= (1− φ)
n(3.1)
La valeur de l'exposant n se situe aux alentours de 4-5. Elle dépend du nombre de Reynolds Ret ainsi quedu rapport entre la taille d des particules et le diamètre D du récipient contenant la suspension. Les valeursrecommandées par Richardson et Zaki sont données dans le tableau 3.1. On remarquera qu'un front desédimentation plan n'est pas stable : si, pour une raison quelconque, une particule au front avance plus viteque l'essaim, alors elle se trouve dans une zone à plus faible fraction volumique où la vitesse de chute estplus élevée. Elle continue donc d'avancer plus vite et de se désolidariser de l'essaim (Cf. les "digitations" surla vidéo 3.3).
Domaine Exposant nRet < 0, 2 4, 65 + 19, 5.d/D
0, 2 < Ret < 1 (4, 35 + 17, 5.d/D) .Re−0,03t
1 < Ret < 200 (4, 45 + 18.d/D) .Re−0,1t
200 < Ret < 500 4, 45.Re−0,1t
500 < Ret 2, 39
Table 3.1 Valeurs de l'exposant n (équation 3.1).
3.1.2 Viscosité dynamique
Un autre exemple de comportement collectif est relatif à la rhéologie d'une suspension. Le premier à s'êtreintéressé à ce problème est Einstein. Il a proposé la relation suivante entre la viscosité dynamique apparentede la suspension µ et la fraction volumique φ en phase dispersée :
µ
µ0= 1 + 2, 5.φ (3.2)
où µ0 est la viscosité dynamique du uide suspendant. Cette relation n'est valable qu'à faible fractionvolumique (φ < 10−2). Pour des fractions volumiques plus élevées, Mills a proposé (tous les auteurs sont enaccord avec cette expression) :
µ
µ0=
1− φ(1− φ
φmax
)2 (3.3)
où φmax est la fraction volumique correspondant à un empilement maximal, que nous prendrons égale à4/7 soit environ 57%. Quand φ tend vers 0 (solution diluée), un développement limité conduit à la relationd'Einstein.
3.1.3 Perméabilité
La perméabilité caractérise un milieu poreux dans un contexte d'écoulement de uide au travers de cemilieu. Il ne s'agit pas à proprement parler d'écoulement diphasique, mais les ingrédients y sont. La phasedispersée est ici immobile, la phase continue est mobile.Le point de départ est la loi de Darcy, qui est la relation constitutive ou phénoménologique pour les écoule-ments en milieu poreux :
~v =−kµ.∇p (3.4)
21
Chapitre 3. Comportement collectif des particules
où k est la perméabilité. La vitesse ~v est appelée vitesse en fût vide ou vitesse supercielle. Legradient de pression ∇p est égal au ratio de la perte de charge ∆P sur la longueur apparente L du milieuporeux. La perméabilité k est une grandeur indépendante du uide ; elle caractérise le milieu poreux. Sadimension est celle d'une longueur au carré et elle s'exprime naturellement en m2, cm2, . . .. Communément,on utilise une autre unité, le darcy (symbole d) ou millidarcy (symbole md), avec le facteur de conversion : 1d = 9,869233×10?13 m2. A titre d'illustration, citons quelques valeurs typiques de perméabilité : gravier (104
d), sable (10 d), grès (1 md), argile et granite (10−5 md). La purication de liquide par (ultra)ltration faitappel à des membranes dont la taille de pore va de quelques nanomètres à quelques dizaines de micromètres.
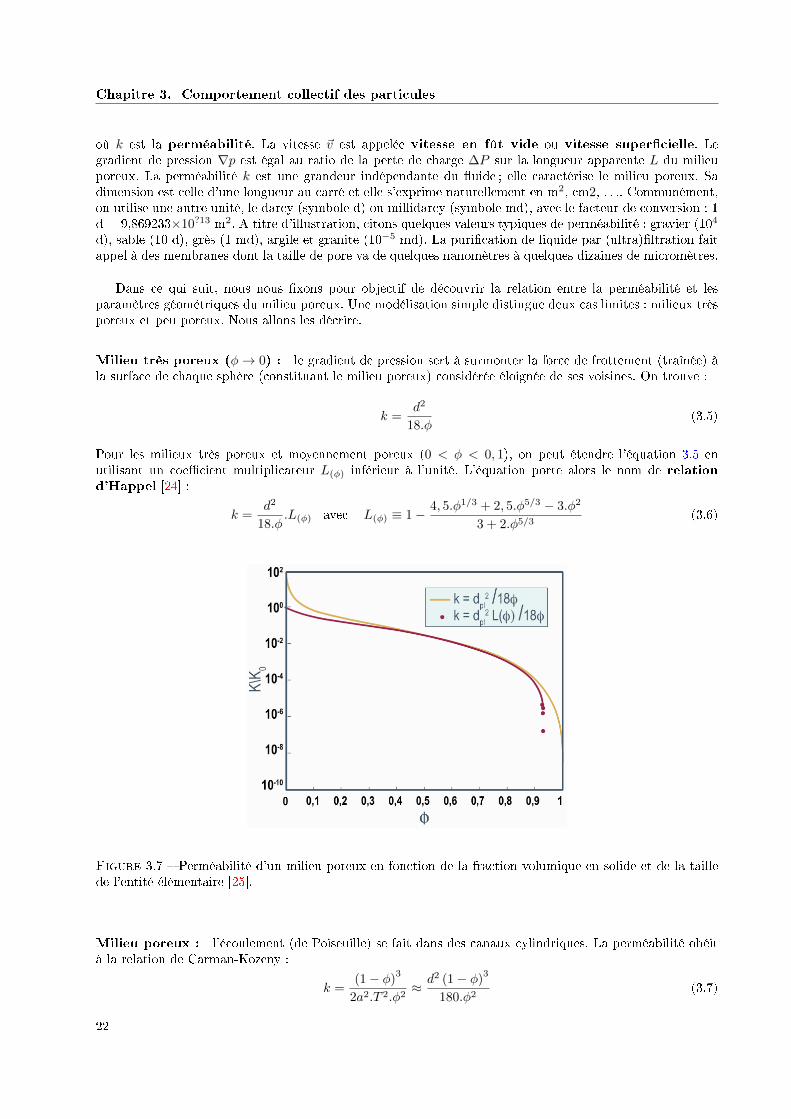
Dans ce qui suit, nous nous xons pour objectif de découvrir la relation entre la perméabilité et lesparamètres géométriques du milieu poreux. Une modélisation simple distingue deux cas limites : milieux trèsporeux et peu poreux. Nous allons les décrire.
Milieu très poreux (φ→ 0) : le gradient de pression sert à surmonter la force de frottement (traînée) àla surface de chaque sphère (constituant le milieu poreux) considérée éloignée de ses voisines. On trouve :
k =d2
18.φ(3.5)
Pour les milieux très poreux et moyennement poreux (0 < φ < 0, 1), on peut étendre l'équation 3.5 enutilisant un coecient multiplicateur L(φ) inférieur à l'unité. L'équation porte alors le nom de relationd'Happel [24] :
k =d2
18.φ.L(φ) avec L(φ) ≡ 1− 4, 5.φ1/3 + 2, 5.φ5/3 − 3.φ2
3 + 2.φ5/3(3.6)
Figure 3.7 Perméabilité d'un milieu poreux en fonction de la fraction volumique en solide et de la taillede l'entité élémentaire [25].
Milieu poreux : l'écoulement (de Poiseuille) se fait dans des canaux cylindriques. La perméabilité obéità la relation de Carman-Kozeny :
k =(1− φ)
3
2a2.T 2.φ2≈ d2 (1− φ)
3
180.φ2(3.7)
22

3.2. Interaction physico-chimique entre particules
où T est la tortuosité 2, a la surface spécique et d la taille caractéristique des particules constituant lelit poreux. Cette loi est valable pour un écoulement laminaire (nombre de Reynolds particulaire inférieur àl'unité). Au-delà, les eets inertiels créent une perte de charge supplémentaire.
3.2 Interaction physico-chimique entre particules
3.2.1 Dénitions
L'agglomération des suspensions est un phénomène très courant dans les réacteurs polyphasiques. L'ag-glomération (au sens large) d'une suspension est la collision suivie de collage entre particules solides dans unuide suspendant. Précisons tout d'abord le vocabulaire (lequel est encore sujet à discussion).
L'agrégation (ou coagulation) est le phénomène de base : l'objet issu de la collision de particulesprimaires est un assemblage de ces dernières, qui gardent donc leur individualité. L'agrégat est parconséquent fragile ; il se détruit par désagrégation.
L'agglomération est une agrégation associée à de la croissance cristalline : la liaison entre particulesprimaires est consolidée par la formation d'un col cristallin. L'agglomérat est en général cohésif ; il sedétruit par brisure.
La coalescence est une agrégation qui conduit à un objet de même forme que les particules primaires(coalescence de gouttes liquides) : la particule primaire y a perdu toute individualité.
La oculation est une agrégation favorisée par la présence de molécules de polymère assurant unpontage entre particules primaires.
Nous étudierons essentiellement l'agrégation (qui est le phénomène clef). Elle a donné lieu à de nombreux tra-vaux expérimentaux et théoriques. Nous étudierons la formation d'un agrégat (agglomérat) puis la cinétiqueglobale d'agrégation (agglomération).
3.2.2 Théorie DLVO statique
Une suspension est dite stable si la distribution en taille des particules est constante au cours du temps.Elle est dite instable dans le cas contraire. On a vu que le mouvement brownien et le cisaillement duuide étaient responsables de collisions entre particules. En l'absence de forces d'interaction, les particulesconservent leur individualité lors de la collision ; elles repartent comme elles sont venues et la suspension eststable. En revanche, lorsque la force d'interaction nette est attractive, les particules peuvent s'agréger lorsdes collisions et donner naissance à des particules plus grosses.
La théorie la plus ancienne qui permet de prédire la stabilité d'une suspension a été établie parDerjaguin,Landau, Verwey et Overbeek. Elle porte le nom de théorie DLVO. Elle a été développée pour des suspen-sions colloïdales, c'est-à-dire des suspensions d'objets dont la taille est comprise entre 1 nm et 1 µm environ.Dans la pratique, les forces qui s'exercent sur les particules dérivent d'un potentiel V :
~F = −∇V (3.8)
Le potentiel d'interaction total VT entre deux particules est la somme du potentiel VA dont dérivent lesforces attractives et du potentiel VR dont dérivent les forces répulsives :
VT ≡ VA + VR (3.9)
La stabilité de la suspension sera conditionnée par la fonction VT (r). Dans ce qui suit, on établira l'expressiondes potentiels VA et VR. Les forces prédominantes sont les forces attractives de Van der Waals (plus spéci-quement la force de London), la force répulsive de non-interpénétration et la force répulsive électrostatique.Par souci de simplication, les particules seront considérées comme sphériques.
2. La tortuosité est le rapport entre la longueur réelle parcourue par le uide (avec tous les détours imposés par la présencedes particules) et la longueur "à vol d'oiseau" entre les points de départ et d'arrivée.
23

Chapitre 3. Comportement collectif des particules
3.2.2.1 Forces attractives de Van der Waals
Les trois forces attractives de Van der Waals sont la force dispersive de London (entre deux dipôlesinduits), la force inductive de Debye (un dipôle permanent et un dipôle induit) et la force d'orientation deKeesom (deux dipôles permanents). La force de London est la plus importante car tous les matériaux sontpolarisables.
Force entre deux molécules : si on considère deux molécules i et j distantes de r, l'énergie d'interactionV entre moments dipolaires instantanés obéit à la relation :
VA,molécule = −Cijr6
avec Cij ≡3.αi.αj
2.Ei.EjEi + Ej
(3.10)
où αi et Ei sont la polarisabilité et l'énergie de première ionisation de la molécule i 3. On voit que la forcequi s'exerce entre deux molécules est de très courte portée (en 1/r7).
Force entre deux objets de taille nie : pour calculer la force qui s'exerce entre deux objets matériels,Hamaker a fait l'hypothèse de l'additivité des forces : l'énergie d'interaction entre deux objets est la sommede toutes les énergies d'interaction de London relatives aux paires constituées d'une molécule dans chaquesphère. La portée de la force de London devient alors nettement plus importante (en 1/r3). D'une manièregénérale, le potentiel d'interaction entre deux objets macroscopiques est le produit d'une fonction f quidépend de la morphologie des corps en présence et de leur distance de séparation h ≥ 0 par la constantede Hamaker A qui quantie l'attraction entre molécules :
VA,particule = −A(matériau).f(morphologie,distance) (3.11)
En utilisant l'hypothèse d'additivité, on montre que dans le cas général, lorsque les deux particules (matériaux1 et 2) sont immergées dans un uide (matériau 3), la valeur de la constante de Hamaker A est égale à :
A = A12 +A33 −A13 −A23 avec Aij ≡ π2.Cij .ρi.ρj (3.12)
où ρi désigne la concentration moléculaire de i dans le matériau (exprimée en molécules/m3). En l'absencede données, on peut approcher Aij par
√Aii.Ajj . La constante de Hamaker prend des valeurs typiquement
comprises entre 10−19 et 10−21 J. Pour plus de lisibilité, on remplace le Joule par une autre unité plusadaptée, le kBT , qui est le produit de la constante de Boltzmann kB par la température thermodynamiqueT et qui vaut 4, 047.10−21 J à 20°C.
Lorsque les particules sont des sphères de rayon ri et rj , la fonction f s'énonce :
f =1
6.
[2r1r2
h2 + 2r1h+ 2r2h+
2r1r2
h2 + 2r1h+ 2r2h+ 4r1r2+ ln
h2 + 2r1h+ 2r2h
h2 + 2r1h+ 2r2h+ 4r1r2
](3.13)
Lorsqu'on a aaire à deux sphères identiques de rayon R, la fonction f converge asymptotiquement vers lafonction (1/12) ∗ R/h lorsque h R et vers la fonction (16/9) ∗ (R/h)6 lorsque h R. Pour h = R, on af = 1/174.
3.2.2.2 Force répulsive de Pauli
Lorsque deux atomes se rapprochent, ils subissent une force répulsive dite force de Pauli ou forcede Born car l'interpénétration des nuages électroniques s'apparente à un peuplement supplémentaire desorbitales, ce qui est exclu par le principe de Pauli. Le potentiel dont dérive cette force est usuellement :
VR,Pauli =CPauli
r12(3.14)
3. L'énergie de première ionisation Ei de la molécule i s'exprime en fonction de la longueur d'onde de première ionisationλi grâce à la relation Ei = hc/λi où h est la constante de Planck et c la vitesse de la lumière .
24
3.2. Interaction physico-chimique entre particules
3.2.2.3 Force répulsive de double-couche électrique
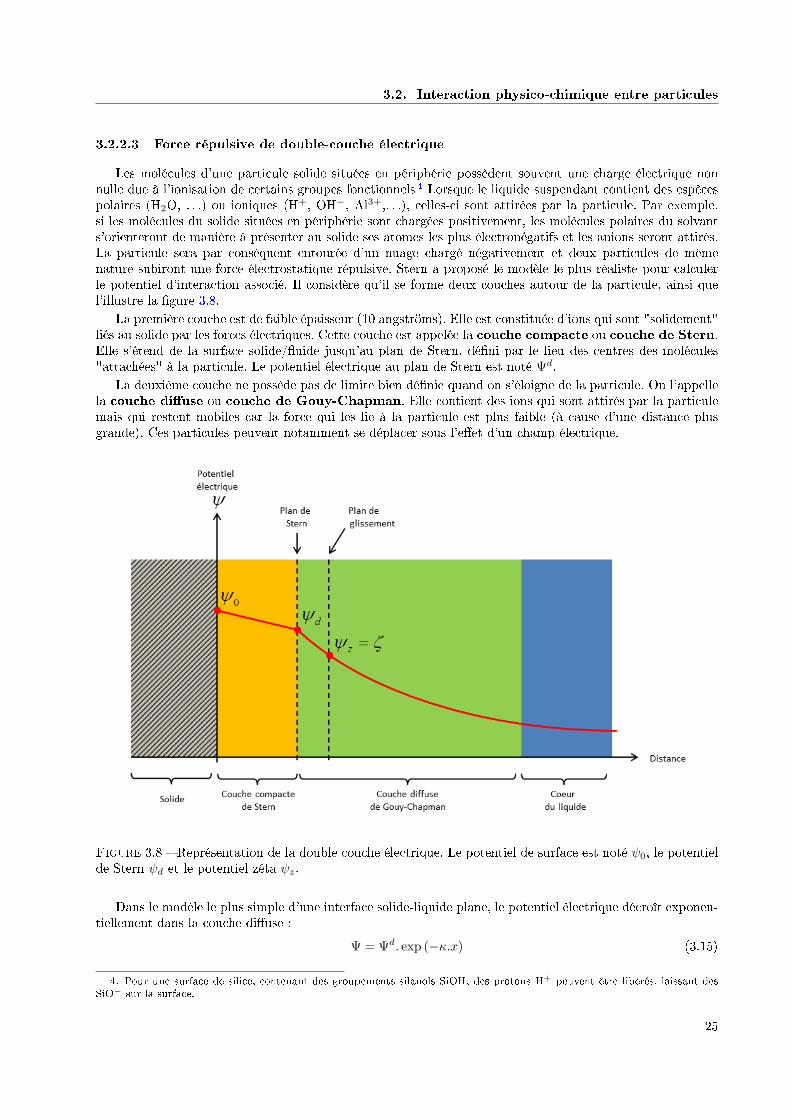
Les molécules d'une particule solide situées en périphérie possèdent souvent une charge électrique nonnulle due à l'ionisation de certains groupes fonctionnels 4 Lorsque le liquide suspendant contient des espècespolaires (H2O, . . .) ou ioniques (H+, OH−, Al3+,. . .), celles-ci sont attirées par la particule. Par exemple,si les molécules du solide situées en périphérie sont chargées positivement, les molécules polaires du solvants'orienteront de manière à présenter au solide ses atomes les plus électronégatifs et les anions seront attirés.La particule sera par conséquent entourée d'un nuage chargé négativement et deux particules de mêmenature subiront une force électrostatique répulsive. Stern a proposé le modèle le plus réaliste pour calculerle potentiel d'interaction associé. Il considère qu'il se forme deux couches autour de la particule, ainsi quel'illustre la gure 3.8.
La première couche est de faible épaisseur (10 angströms). Elle est constituée d'ions qui sont "solidement"liés au solide par les forces électriques. Cette couche est appelée la couche compacte ou couche de Stern.Elle s'étend de la surface solide/uide jusqu'au plan de Stern, déni par le lieu des centres des molécules"attachées" à la particule. Le potentiel électrique au plan de Stern est noté Ψd.
La deuxième couche ne possède pas de limite bien dénie quand on s'éloigne de la particule. On l'appellela couche diuse ou couche de Gouy-Chapman. Elle contient des ions qui sont attirés par la particulemais qui restent mobiles car la force qui les lie à la particule est plus faible (à cause d'une distance plusgrande). Ces particules peuvent notamment se déplacer sous l'eet d'un champ électrique.
Figure 3.8 Représentation de la double couche électrique. Le potentiel de surface est noté ψ0, le potentielde Stern ψd et le potentiel zéta ψz.
Dans le modèle le plus simple d'une interface solide-liquide plane, le potentiel électrique décroît exponen-tiellement dans la couche diuse :
Ψ = Ψd. exp (−κ.x) (3.15)
4. Pour une surface de silice, contenant des groupements silanols SiOH, des protons H+ peuvent être libérés, laissant desSiO− sur la surface.
25

Chapitre 3. Comportement collectif des particules
La distance caractéristique κ−1 est appelée longueur de Debye-Hückel ou épaisseur de double-couche :
κ−1 ≡
√ε.kB .T
2.NA.q2e .I
(3.16)
où ε désigne la permittivité diélectrique du uide porteur 5, kB la constante de Boltzmann et T la températurethermodynamique, NA le nombre d'Avogadro et qe la charge électrique élémentaire. Dans l'équation 3.16,la grandeur I s'exprime en mol.m−3. Il s'agit de la force ionique de la solution dénie par :
I ≡ 1
2.∑i
Ci.z2i (3.17)
où Ci est la concentration de l'espèce électrolytique i et zi sa valence. Pour l'eau à 20°C, l'épaisseur de lacouche diuse est :
κ−1[nm] =
0, 304√I[mol.l−1]
(3.18)
Par intégration, on peut montrer que l'interaction répulsive entre deux particules identiques de rayon Rdérive du potentiel :
VR,élec = 2πεR.
[φ∗. tanh
(φ0
φ∗
)]2
. exp−κ.(r−2R) avec φ∗ ≡ 4.kB .T
z.qe(3.19)
où z la valence des ions entourant les particules, φ0 le potentiel de surface de la particule supposé constantet r la distance centre à centre. Lorsque le potentiel de surface φ0 est négligeable devant φ∗, l'équation 3.19se simplie en :
VR,élec = 2πεR.φ20. exp−κ.(r−2R) (3.20)
Pour résumer les caractéristiques de la force répulsive de double-couche électrique, on peut dire : son rayon d'action diminue lorsque la concentration en espèces ioniques augmente. On dit aussi que
la solution ionique écrante la particule (équation 3.16), son intensité augmente lorsque la charge surfacique de la particule augmente (équation 3.20).
3.2.2.4 Stabilité de la suspension
La stabilité de la suspension est dictée par l'allure du potentiel d'interaction total entre deux particules :
VT = VA,London + VR,Pauli + VR,élec (3.21)
A très longue distance, l'intensité des trois forces (Pauli, London et électrostatique) est négligeable devantles forces hydrodynamiques. Les particules ne se voient pas et restent isolées. A très courte distance, la forced'exclusion de Pauli en 1/r13 est toujours prédominante. Pour des distances intermédiaires, l'intensité et lesigne de la force d'interaction dépend essentiellement de la force ionique :
pour des forces ioniques élevées (cas I), l'écrantage est susamment élevé pour que la force de double-couche électrique soit négligeable devant les deux autres forces. L'allure de VT (r) est celle du potentielde Lennard-Jones, caractérisée par un minimum. Dès que les particules se voient, elles s'attirent etforment un agrégat. Comme le puit de potentiel est très profond (plusieurs dizaines ou centaines dekB .T ), ce collage est pratiquement irréversible ; les forces hydrodynamiques ne sont pas susantespour rompre l'agrégat. La distance d'équilibre entre particules est de l'ordre de quelques angströms.
pour des forces ioniques modérée (cas II), on observe deux minima et un maximum relatif qui jouele rôle de barrière de potentiel. Si deux particules arrivent dans le puit de potentiel le plus profond,elles forment un agrégat très solide. Si elles arrivent dans le minimum secondaire, elles forment unagrégat un peu plus fragile avec une distance interparticulaire de l'ordre de la dizaine de nanomètres.On parle d'agrégation réversible pour traduire le fait que si l'agrégat subit une force susante, il serompra.
5. La permittivité ε du uide porteur est liée à sa permittivité relative εr et à la permittivité diélectrique du vide ε0 par larelation ε = εr.ε0. Pour l'eau à 20°C, on a εr ≈ 80.
26

3.2. Interaction physico-chimique entre particules
pour des forces ioniques faibles (cas III), il existe un minimum unique et un maximum relatif. Lors-qu'elles sont éloignées, les particules se repoussent les autres. Si une force susante les amène àfranchir la barrière de potentiel, elles forment un agrégat solide.
D'un point de vue opérationnel, si l'on souhaite déstabiliser une suspension, on peut jouer sur deux plans : augmenter la fréquence et l'intensité des collisions : une augmentation de température accélère le
mouvement brownien ; une augmentation de la turbulence augmente l'énergie cinétique des particules augmenter l'ecacité du collage lors des collisions : une augmentation de la concentration en élec-
trolytes et/ou de la valence conduit à diminuer l'épaisseur de la couche diuse et donc à abaisser labarrière de potentiel. Les sels les plus fréquemment utilisés sont le sulfate d'aluminium Al2(SO4)3·18H2O, l'aluminate de sodium NaAlO2, le chlorure ferrique FeCl3·6 H2O, le sulfate ferrique Fe2(SO4)3·9H2O et le sulfate ferreux FeSO4·7 H2O.
En pratique, le critère de stabilité d'une suspension (au repos) est le suivant :
V maxT > 20.kBT (3.22)
Figure 3.9 Inuence de la concentration c en électrolytes sur l'allure du potentiel total d'interaction(cI > cII > cIII).
27

Chapitre 3. Comportement collectif des particules
Figure 3.10 Vidéo - Flocculation [26].
28

3.3. Dynamique d'une population de grains
3.3 Dynamique d'une population de grains
Considérons une population d'agrégats (constitués de particules primaires). L'agrégation de deux agrégatspeut se représenter formellement par la gure 3.11 et la pseudo-réaction chimique.
Figure 3.11 Représentation schématique de l'agrégation.
En étendant la cinétique de la réaction chimique à l'agrégation, la vitesse d'agrégation peut se quantierpar la vitesse (algébrique) de création d'agrégats comportant i+ j particules primaires à partir d'un agrégatde i particules primaires et d'un autre agrégat de j particules primaires. Si on considère cette réaction deformation comme du premier ordre, alors on écrit :
dNi+jdt
= ka (i, j) .Ni.Nj (3.23)
avec :ka (i, j) = k0 (Ri, Rj , H1) .α (Ri, Rj , VT , H2) (3.24)
La grandeur H1 représente la nature hydrodynamique de la collision et la grandeur H2 représente l'hydro-dynamique juste avant la collision. L'ecacité d'agrégation α est en général dicile à évaluer. Elle dépendà la fois de l'hydrodynamique locale et des forces d'interaction entre particules. Les grandeurs k0 et ka sontdes constantes cinétiques souvent appelées noyaux.
Le calcul du noyau de collision k0 est dû à Von Smoluchowski (1916, 1917). Nous allons le détailler pourdeux causes de collision rencontrées en pratique : mouvement brownien et uide cisaillé. Pour simplier, nousallons considérer par la suite l'agrégation ente particules sphériques et non entre agrégats. Nous présenteronstrois études expérimentales réalisées dans les trois conditions hydrodynamiques rencontrées pratiquement :
en milieu tranquille dans un milieu en écoulement lent dans un milieu turbulent
Le mouvement brownien (agitation thermique) est la cause des collisions conduisant à l'agrégation dans unmilieu tranquille.Dans un écoulement (laminaire ou turbulent), il existe des gradients de vitesse locaux ; des particules voisines,portées par le uide, suivent des lignes de courant contiguës à des vitesses diérentes rendant ainsi possibleles collisions.
3.3.1 Collisions provoquées par le mouvement brownien
Nous allons calculer la constante cinétique k0 quand la cause de la collision est le mouvement brownien.On considère une particule notée i (rayon Ri), supposée immobile, et on calcule le débit de particules j(rayon Rj) pouvant entrer en collision avec i. Ce débit Jj est le produit d'une surface par un ux ~jj quiobéit à l'équation de continuité. Cette dernière prend la forme suivante à l'état stationnaire :
∇ ·~jj = 0 (3.25)
La symétrie du problème étant sphérique, cela implique que le ux jj est proportionnel 1/r2 :
jj = F.1
r2(3.26)
29

Chapitre 3. Comportement collectif des particules
La constante de proportionnalité F est liée à Jj , le débit de particules j traversant la surface sphérique situéeà la distance r de la particule centrale i. En eet, pour tout r, on a :
Jj = 4πr2.jj (3.27)
Compte tenu des équations 3.26 et 3.27, on établit que le ux jj arrivant sur la particule i s'exprime par :
jj =Jj
4πr2(3.28)
Par ailleurs, ce ux de particules d'origine brownienne peut s'écrire comme un ux diusif :
~jj = −Dj .∇nj (3.29)
où nj est la concentration locale en particule j et Dj représente le coecient de diusion des particules j.Dans notre cas particulier où il y a une symétrie sphérique, l'équation 3.29 se simplie en :
jj = −Dj .∂nj∂r
(3.30)
La combinaison de l'équation de continuité (3.28) et de l'équation de diusion (3.30) conduit à une équationaux dérivées partielles du premier ordre décrivant l'évolution de la concentration nj :
Jj4πr2
= −Dj .∂nj∂r
(3.31)
Sa résolution nécessite de connaître une condition aux limites. Si l'on suppose que toute particule j arrivantau contact de la particule i disparaît (pour donner naissance à un agrégat i+j), alors on peut raisonnablementprendre la condition suivante :
nj = 0 pour r = Rij (3.32)
où Rij ≡ Ri + Rj est la distance centre à centre lorsque les particules i et j sont en contact. La résolutionde l'équation 3.31 conduit à :
nj =Jj
4π.Dj.
(1
r− 1
Rij
)(3.33)
Lorsque les particules sont inniment loin (r →∞), la concentration en particules j tend vers la concentrationmoyenne (nj → Nj). L'expression 3.33 permet alors de trouver le débit de particules arrivant au contact dela particule i :
Jj = −4π.Dj .Rij .Nj (3.34)
L'indiscernabilité, c'est-à-dire le comportement symétrique de i et j, conduit à :
dNi+jdt
= −Jij = 4π (Di +Dj) .Rij .Ni.Nj (3.35)
Le noyau d'agrégation s'exprime donc ainsi :
k0 (i, j) = 4π (Di +Dj) . (Ri +Rj) (3.36)
Pour aller plus loin, on peut tenter d'expliciter le coecient de diusion. Ce dernier est lié à la taille de laparticule par l'équation de Stokes-Einstein :
Di =kB .T
fi(3.37)
où fi est le facteur de friction pour la particule (sphérique) dans le uide de viscosité dynamique µf (voiréquation 2.6 en page 6) :
fi ≡ 6πµf .Ri (3.38)
On en déduit l'expression nale du noyau d'agrégation :
k0 (i, j) =2
3.kB .T
µf.(Ri +Rj)
2
Ri.Rj(3.39)
Pour des particules identiques, on a k0 = 83 .kB .Tµf
.
30

3.3. Dynamique d'une population de grains
Figure 3.12 Représentation schématique de la collision dans un écoulement cisaillé.
3.3.2 Collisions provoquées par un écoulement cisaillé
Nous allons maintenant calculer la constante k0 quand la cause de la collision est le cisaillement. Laconguration est représentée sur la gure 3.12. Le débit Jj (en [#/s]) de particules j vers la particule deréférence i, supposée immobile dans un premier temps, est :
Jj =
∫∫ΣI
Nj .~Vij .d~S (3.40)
où Nj est la concentration moyenne de particules j (en [#/m3]), ~Vij la vitesse relative entre i et j (en[m/s]) et ΣI la surface d'interception (en [m2]) dénie de la manière suivante : toute particule j traversantperpendiculairement cette surface (située loin de i) entrera en collision avec i. Dans le cas où l'écoulementest cisaillé, la vitesse se met sous la forme :
~Vij = γ.~rij (3.41)
où ~rij représente la distance centre à centre des particules i et j. Si l'on note x la direction de l'écoulementet y une direction orthogonale, alors rij = y et l'on peut écrire :
Jj = Nj
∫∫ΣI
γ.y.dS (3.42)
La vitesse d'agrégation se met sous la forme :
dNi+jdt
= −Jij = Ni.Jj (3.43)
Le noyau d'agrégation sous cisaillement est donc :
k0 (i, j) = γ.
∫∫ΣI
y.dS (3.44)
Pour des particules sphériques sans interaction (physico-chimique ou hydrodynamique), la surface d'inter-ception est le disque de rayon Rij ≡ Ri +Rj .∫∫
ΣI
y.dS =
∫∫ΣI
(r. sin θ) . (r.dθ.dr) = 2.
∫ π
0
sin θ.dθ.
∫ Rij
0
r2.dr =4
3R3ij (3.45)
31

Chapitre 3. Comportement collectif des particules
Ce qui permet d'écrire le noyau d'agrégation sous la forme :
k0 (i, j) =4
3. (Ri +Rj)
3.γ (3.46)
La constante cinétique relative à l'agrégation laminaire a été étendue au cas de l'agrégation turbulente parSaman et Turner en prenant pour vitesse de cisaillement l'expression :
γ = C.(εmν
)1/2
avec C ≈ 0, 5 (3.47)
Le diamètre des particules primaires étant rarement supérieur à 10 µm, celles-ci et les agrégats correspondantssont soumis uniquement à un écoulement sous cisaillement, même si le milieu est turbulent. En eet, ilsévoluent dans les tourbillons les plus petits et les plus nombreux (dont le diamètre est en moyenne 50 µm),à l'intérieur desquels l'écoulement est de type "cisaillement".
32

Chapitre 4
Modélisation macroscopique des
écoulements polyphasiques
4.1 Introduction
Quand on étudie l'hydrodynamique d'une suspension, la façon la plus simple d'aborder le problème estde découpler les phénomènes :
l'écoulement du uide (liquide) est sans les particules. On aboutit aux équations habituelles de lamécanique des uides (équation de continuité et équation de Navier-Stokes en régime laminaire outurbulent) : il s'agit d'équations aux dérivées partielles conduisant aux champs de vitesse et de pression,c'est-à-dire aux valeurs de la pression et des composantes de la vitesse en tout point et à chaque instant.On parle d'approche (ou de description) eulérienne pour le uide.
de considérer le mouvement et donc la trajectoire d'une ou des particules en appliquant le principefondamental de la dynamique à la particule soumise à des forces extérieures, dont celles dues auuide. On calcule donc la vitesse et la position de la particule à tout instant. L'équation diéren-tielle ordinaire donnant le vecteur vitesse fait évidemment intervenir le vecteur vitesse et la pressiondu uide à l'endroit où se trouve la particule. On parle alors d'approche lagrangienne pour la particule.
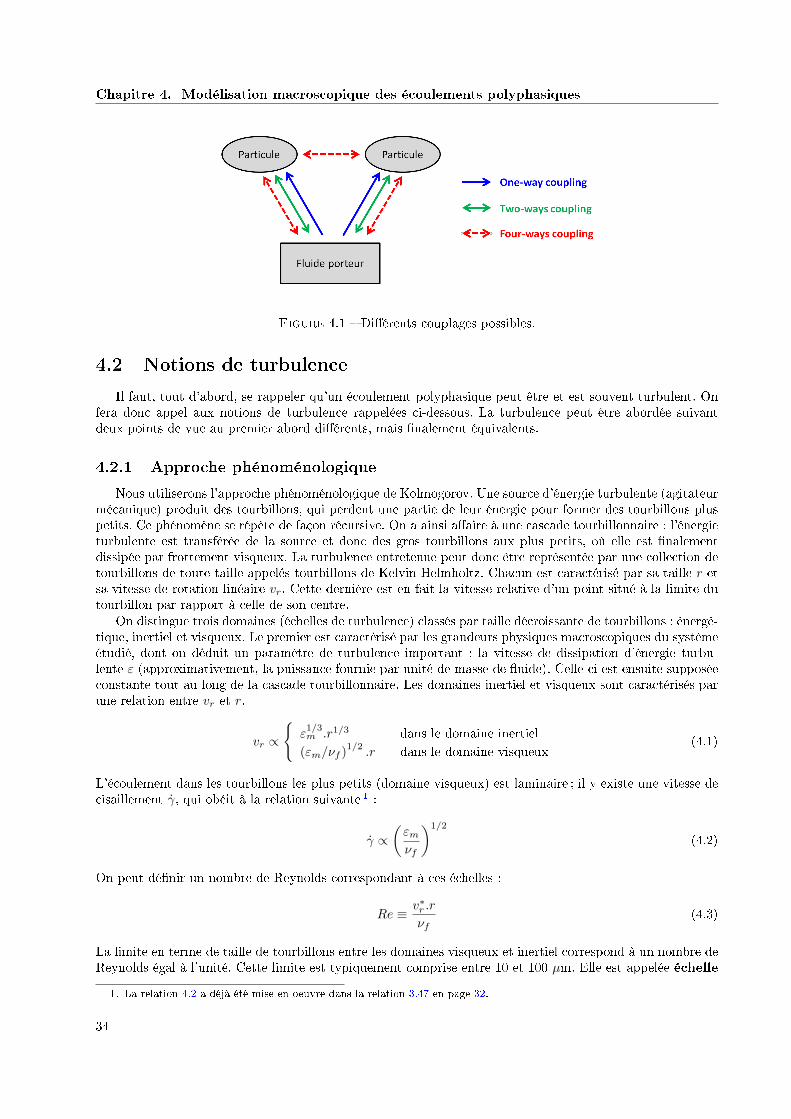
Cette approche est découplée, dans la mesure où l'écoulement est supposé non perturbé par la présencedes particules, ce qui n'est pas le cas pour ces dernières. Cette simplication n'est applicable qu'auxsuspensions diluées
Nous aurons en tête l'exemple d'une suspension constituée d'une phase continue (liquide) et d'une phasedispersée composée de particules solides. Cependant, on ne se restreint pas uniquement à ce système. Troisapproches sont possibles :
Approche lagrangienne pour les particules (DPM en anglais) : la phase liquide est traitée à l'aide del'équation de Navier-Stokes (NS) dans laquelle sont éventuellement inclus des termes de couplages,tandis que les particules de la phase solide sont suivies individuellement (la trajectoire de chaqueparticule solide est évaluée grâce à l'application du principe fondamental de la dynamique). Cettemodélisation ne fonctionne que pour des suspensions diluées (peu de particules).
Modèle à deux uides, appelé aussi modèle eulérien-eulérien (EEM en anglais) : les deux phases sonttraitées comme des uides ; on doit résoudre deux équations NS et deux équations de continuité. C'estune méthode assez précise, mais coûteuse en temps de calcul.
Modèle homogène : typiquement des modèles de mélange (ASM en anglais) : on dispose alors d'uneseule équation NS (pour le mélange) et de deux équations de continuité. C'est une méthode assezfacile à mettre en oeuvre. Nous mettrons l'accent sur celle-ci.
Nous mentionnerons la méthode VOF (Volume Of Fluid) où l'interface entre la phase dispersée et la phasecontinue est précisément calculée ; cette méthode est appliquée, par exemple, à la dynamique de grossesbulles (peu nombreuses) qui se déforment dans un liquide.
33
Chapitre 4. Modélisation macroscopique des écoulements polyphasiques
Figure 4.1 Diérents couplages possibles.
4.2 Notions de turbulence
Il faut, tout d'abord, se rappeler qu'un écoulement polyphasique peut être et est souvent turbulent. Onfera donc appel aux notions de turbulence rappelées ci-dessous. La turbulence peut être abordée suivantdeux points de vue au premier abord diérents, mais nalement équivalents.
4.2.1 Approche phénoménologique
Nous utiliserons l'approche phénoménologique de Kolmogorov. Une source d'énergie turbulente (agitateurmécanique) produit des tourbillons, qui perdent une partie de leur énergie pour former des tourbillons pluspetits. Ce phénomène se répète de façon récursive. On a ainsi aaire à une cascade tourbillonnaire : l'énergieturbulente est transférée de la source et donc des gros tourbillons aux plus petits, où elle est nalementdissipée par frottement visqueux. La turbulence entretenue peut donc être représentée par une collection detourbillons de toute taille appelés tourbillons de Kelvin-Helmholtz. Chacun est caractérisé par sa taille r etsa vitesse de rotation linéaire vr. Cette dernière est en fait la vitesse relative d'un point situé à la limite dutourbillon par rapport à celle de son centre.
On distingue trois domaines (échelles de turbulence) classés par taille décroissante de tourbillons : énergé-tique, inertiel et visqueux. Le premier est caractérisé par les grandeurs physiques macroscopiques du systèmeétudié, dont on déduit un paramètre de turbulence important : la vitesse de dissipation d'énergie turbu-lente ε (approximativement, la puissance fournie par unité de masse de uide). Celle-ci est ensuite supposéeconstante tout au long de la cascade tourbillonnaire. Les domaines inertiel et visqueux sont caractérisés parune relation entre vr et r.
vr ∝
ε
1/3m .r1/3 dans le domaine inertiel
(εm/νf )1/2
.r dans le domaine visqueux(4.1)
L'écoulement dans les tourbillons les plus petits (domaine visqueux) est laminaire ; il y existe une vitesse decisaillement γ, qui obéit à la relation suivante 1 :
γ ∝(εmνf
)1/2
(4.2)
On peut dénir un nombre de Reynolds correspondant à ces échelles :
Re ≡ v∗r .r
νf(4.3)
La limite en terme de taille de tourbillons entre les domaines visqueux et inertiel correspond à un nombre deReynolds égal à l'unité. Cette limite est typiquement comprise entre 10 et 100 µm. Elle est appelée échelle
1. La relation 4.2 a déjà été mise en oeuvre dans la relation 3.47 en page 32.
34

4.3. Description des modèles
de Kolmogorov et obéit à la relation :
rK ≡
(ν3f
εm
)1/4
(4.4)
Cette description convient particulièrement à une situation expérimentale, où la turbulence est proche del'homogénéité et de l'isotropie ; il en est ainsi dans les réacteurs de cristallisation ou précipitation fermés etagités. La connaissance de la valeur locale de εm ou sa moyenne dans un petit volume sera susante pourdécrire le mouvement d'une suspension turbulente constituée de grains micrométriques.
A l'échelle d'un réacteur agité, il existe néanmoins des zones de forte et de faible turbulence. L'intérieurde ces zones constituera de petits réacteurs de cristallisation, dans lesquels la théorie de Kolmogorov s'ap-pliquera. Chaque zone sera caractérisée par son volume et ses paramètres de turbulence, en particulier savitesse de dissipation d'énergie turbulente. Plus le nombre de zones utilisées pour représenter le réacteur estélevé, plus réaliste sera la modélisation. On peut cependant se contenter d'une description à une zone avecune vitesse de dissipation moyenne dans le réacteur donnée par :
εm =P
ρf .V= Np.ω
3.D5a
T 3(4.5)
4.2.2 Approche mathématique
La turbulence est caractérisée par une uctuation temporelle des grandeurs locales décrivant le uide(vitesse, pression, . . .). Ces grandeurs peuvent être décomposées en une valeur moyenne symbolisée par unebarre supérieure et une valeur uctuante symbolisée par un prime. Il existe diérentes manières de calculerune valeur moyenne de la vitesse. Pour un uide homogène, on prend souvent une moyenne pondérée par lamasse (appelée moyenne de Favre) :
u ≡ 〈ρ.u〉〈ρ〉
(4.6)
Notons que la valeur moyenne, symbolisée par l'opérateur 〈·〉, est calculée sur une courte période (10 à 1000ms). La grandeur moyennée varie sur des échelles de temps beaucoup plus grandes (10 à 1000 s). La vitesseuctuante est dénie comme la diérence entre la valeur instantanée et la valeur moyenne ; elle varie trèsvite :
u′ ≡ u− u (4.7)
La valeur moyenne de ‖u′‖ est typiquement de l'ordre de 10-30% de la valeur de la vitesse moyenne ‖u‖pour un écoulement turbulent.Dans ce qui suit, pour ne pas alourdir les écritures, on omettra la barre lorsque l'on utilisera la valeurmoyenne.
4.3 Description des modèles
Les simulations numériques d'écoulements polyphasiques sont trop coûteuses en temps si l'on adoptel'approche Lagragienne où la trajectoire de chacune des particules est calculée. Par conséquent, on utiliseune approche Eulérienne qui consiste à considérer chaque phase dispersée comme un milieu continu pourlequel on pourra écrire des équations de conservation de la masse et de la quantité de mouvement. Deuxprincipaux types de modèles permettent de décrire le comportement d'une suspension :
les modèles Euler-Euler (EEM), appelés encore modèles à N uides (MFM, TFM), qui considèrentque la phase dispersée et le uide suspendant forment chacun une phase continue et que ces deuxphases sont immiscibles.
les modèles de mélange (ASM) : ils sont une simplication des modèles à N uides blabla (ASM :Algebraic Slip Model)
Dans ce qui suit, les vecteurs seront notés en caractère gras pour ne pas surcharger les notations.
35

Chapitre 4. Modélisation macroscopique des écoulements polyphasiques
4.3.1 Modèle Euler-Euler
On considère un système constitué de n phases. Chacune d'elles est caractérisée par une fraction volumiqueαk, une masse volumique ρk et une pression pk. La pression dans les diérentes phases peut varier, notammentpour des raisons de tension interfaciale (la loi de Laplace fait intervenir la taille des objets dispersés).Toutefois, en général, les eets de courbure sont négligeables et la pression est la même dans chaque phase.La vitesse moyenne uk de la phase k est dénie au sens de la turbulence (moyenne de Favre) :
uk ≡〈ρk.uk〉〈ρk〉
(4.8)
En notant Γk la vitesse de création de la phase k, exprimée en kg.m−3.s−1, l'équation de continuité pour laphase k s'écrira :
∂αkρk∂t
+∇ · (αkρkuk) = Γk (4.9)
Le bilan de quantité de mouvement pour chaque phase k (Navier-Stokes) s'écrit :
∂αkρkuk∂t
+∇ · (αkρkuk.uk) = −αk∇pk +∇ · αk(τk
+ τturb,k
)+ αkρk.g+Mk (4.10)
La grandeur Mk est le terme source interfaciale de quantité de mouvement (en gros, la force exercée parles autres phases sur la phase k). Elle s'exprime en qdm.m−3.s−1. La grandeur τ
kdésigne le tenseur des
contraintes visqueuses et la grandeur τturb,k
le tenseur des contraintes de Reynolds déni par :
τturb,k
≡ −〈ρk.u′k.u′k〉 (4.11)
4.3.2 Modèle de mélange (ASM)
La masse volumique du mélange ρm est égale à :
ρm ≡n∑k=1
αkρk (4.12)
De même, la vitesse du centre de masse du mélange um est :
um ≡1
ρm.
n∑k=1
αkρkuk (4.13)
En utilisant ces deux dénitions, la sommation de l'équation de continuité 4.9 pour chacune des n phasesconduit à l'équation de continuité pour le mélange :
∂ρm∂t
+∇ · (ρmum) = 0 (4.14)
De même, on peut sommer le bilan de quantité de mouvement 4.10 pour l'ensemble des n phases. On obtientdans un premier temps l'équation suivante :
∂ρmum∂t
+∇ ·n∑k=1
(αkρkuk.uk) = −∇pm +∇ · τm
+∇ · τturb,m
+ ρm.g+Mm (4.15)
où les dénitions suivantes ont été adoptées pour Mm, pm, τm et τturb,m
:
Mm ≡n∑k=1
αkMk (4.16)
36

4.3. Description des modèles
∇pm ≡n∑k=1
αk∇pk (4.17)
τm≡
n∑k=1
αk.τk (4.18)
τturb,m
≡n∑k=1
αk.τ turb,k(4.19)
On peut noter que Mm = 0 lorsque les forces de tension supercielle sont négligeables et rappeler la formule
de Laplace pour estimer la pression à l'intérieur d'une sphère pint = pext +2.γint/ext
r . Pour aller plus loindans la simplication de l'équation 4.15, on peut dénir la vitesse de diusion uMk de la phase k par ladiérence entre la vitesse uk de la phase k et de la vitesse um du centre de masse :
uMk ≡ uk − um (4.20)
En utilisant les équations 4.12, 4.13 et 4.20, on peut donner une nouvelle expression du second terme dumembre de gauche de l'équation 4.15 :
∇ ·n∑k=1
(αkρkuk.uk) = ∇ · (ρmum.um) +∇ ·n∑k=1
(αkρkuMk.uMk) (4.21)
Il est d'usage de dénir le tenseur des contraintes de diusion τD,m
par :
τD,m≡ −
n∑k=1
αkρkuMk.uMk (4.22)
Cette grandeur est générée par le glissement des phases ; elle est donc nulle lorsque toutes les phases ont lamême vitesse. En utilisant cette dénition et l'équation 4.21, le bilan de quantité de mouvement du mélange4.15 peut se simplier en :
∂ρmum∂t
+∇ · (ρmum.um) = −∇pm +∇ ·(τm
+ τturb,m
+ τD,m
)+ ρm.g+Mm (4.23)
A ce stade, le mélange est caractérisé par l'équation de continuité 4.14 et le bilan de quantité de mouvement4.23. A ces deux équations, il convient d'ajouter n− 1 équations de continuité pour les phases individuelles.En eet, en utilisant la dénition 4.20 de la vitesse de diusion uMk, l'équation de continuité 4.9 peut êtrereformulée sous la forme suivante :
∂αkρk∂t
+∇ · (αkρkum) = Γk −∇ · (αkρkuMk) (4.24)
En l'absence d'échange de masse entre les phases (Γk = 0) et lorsque la masse volumique de chaque phaseest une constante (ρk = constante), l'équation 4.24 se simplie en :
∂αk∂t
+∇ · (αkum) = −∇ · (αkuMk) (4.25)
Un peu de physique. D'un point de vue opérationnel, il s'agit de résoudre numériquement l'équation deconservation de la quantité de mouvement du mélange (4.23) et l'équation de conservation de la masse pourchaque phase (4.25). Ces équations-bilans sont très générales. Il est temps maintenant d'introduire un peude physique spécique au système étudié. Cette physique intervient dans :
les tenseurs des contraintes τket τ
mqui dépendent de la nature du uide
le terme Mm qui traduit l'inuence des forces de tension supercielle la vitesse de diusion uMk qui dépend des forces d'interaction entre les phases (terme de couplage)
37

Chapitre 4. Modélisation macroscopique des écoulements polyphasiques
Tout d'abord, on considérera que le uide est newtonien et donc que :
τk≡ µk.
[(∇uk) + (∇uk)
>]
(4.26)
Dans ce qui suit, nous allons établir l'expression de la vitesse de diusion uMk. Ceci permettra de résoudrel'équation de continuité 4.25. Commençons pour cela par dénir la fraction massique ck de la phase k. Cettedernière est liée à la fraction volumique αk par la relation :
ck ≡ αk.ρkρm
(4.27)
Avec cette notation, l'équation 4.13 qui dénit la vitesse du mélange um s'écrit simplement :
um ≡n∑k=1
ck.uk (4.28)
Dans ce qui suit, pour simplier les expressions, nous allons appliquer l'approche précédente à un systèmeà deux phases : la phase continue (indice c) de vitesse uc et une seule phase dispersée (indice d) de vitesseud. On dénit uCd la vitesse de glissement, ou vitesse relative, par :
uCd ≡ ud − uc (4.29)
Compte-tenu des équations 4.20 et 4.28, on peut établir le lien entre la vitesse de diusion uMd et la vitessede glissement uCd :
uMd = (1− cd) .uCd (4.30)
La vitesse de glissement uCd est obtenue à partir du principe fondamental de la dynamique appliqué à uneparticule de la phase dispersée. La particule étant soumise à son poids, à la poussée d'Archimède et à latraînée (frottement), sa vitesse relative par rapport au uide obéit à la relation :
mdduCddt
= Vd.∆ρ.g− CD.(
1
2ρcuCd.uCd
).Sd (4.31)
où md, Vd et Sd représentent respectivement la masse, le volume et la surface projetée de la particule detaille d.
Dans une suspension concentrée, la vitesse d'une particule donnée est modiée par la présence de sesvoisines ; pour en tenir compte le plus simplement possible, on remplace la viscosité µc de la phase continue,qui intervient dans CD, par la viscosité du mélange µm. Plusieurs corrélations sont disponibles dans lalittérature. La corrélation de Ishii et Mishima s'énonce :
µm = µc.
(1− αd
αdm
)−2,5.αdm.µ∗
avec αdm = 0, 62 et µ∗ =
1 particule solideµd+0,4µcµd+µc
goutte ou bulle(4.32)
La corrélation de Mooney s'énonce :
µm = µc. exp
(2, 5.αd
1− 1, 4.αd
)(4.33)
Le terme de transfert de quantité de mouvement Md induit par la traînée visqueuse peut se mettre sous laforme :
Md = −β.uCd +M′d (4.34)
où M′d est la contribution des uctuations et où le terme β dépend du nombre de Reynolds particulaire, dela fraction volumique en phase dispersée et de la taille des particules. Dans le cadre des hypothèses faitesplus haut, ce terme s'écrit :
β =3
4.CD.
αd.ρcdd
. ‖uCd‖ (4.35)
38

4.3. Description des modèles
Le bilan de quantité de mouvement de la phase k est formulé dans l'équation 4.10. Lorsque la phase k est laphase dispersée d, on a :
∂αdρdud∂t
+∇ · (αdρdud.ud) = −αd∇pd +∇ · αd(τd
+ τturb,d
)+ αdρd.g+Md (4.36)
En utilisant l'équation de continuité de la phase d (équation 4.9) et en se plaçant dans le cas il n'y a pas detransfert de matière entre cette phase et les autres (Γd = 0), on montre facilement que cette équation 4.36peut s'écrire :
αdρd∂ud∂t
+ αdρdud∇ud = −αd∇pd +∇ · αd(τd
+ τturb,d
)+ αdρd.g+Md (4.37)
De même, en utilisant l'équation de continuité du mélange (équation 4.14) et en supposant que les forces detension supercielle sont négligeables (Mm = 0), le bilan de quantité de mouvement du mélange (équation4.23) peut se ré-écrire :
ρm∂um∂t
+ ρmum.∇ · um = −∇pm +∇ ·(τm
+ τturb,m
+ τD,m
)+ ρm.g (4.38)
Si pm = pd = p, on peut multiplier l'équation 4.38 par αd puis soustraire membre à membre le résultat àl'équation 4.37. On peut ensuite isoler le terme Md et utiliser la dénition de la vitesse de diusion uMd
pour écrire :
Md = αd
[ρd.
∂uMd
∂t+ (ρd − ρm) .
∂um∂t
]+ αd. [ρdud.∇ud − ρmum.∇um]
−∇ ·[αd
(τd
+ τturb,d
)]+ αd∇ ·
[τm
+ τturb,m
+ τD,m
]− αd (ρd − ρm) .g
(4.39)
L'équation 4.39 peut être simpliée. Pour cela, on prendra les hypothèses suivantes : les particules atteignent rapidement leur vitesse terminale. C'est l'hypothèse d'équilibre local. Elle
implique que l'on peut négliger le terme d'accélération ∂uMd/∂t qui gure dans le premier terme le terme ud.∇ud peut être remplacé par um.∇um les contraintes visqueuses et de diusion sont négligeables devant les contraintes turbulentes
Il s'ensuit que :
Md = αd. (ρd − ρm) .
[∂um∂t
+ um.∇um − g]−∇ ·
[αd.τ turb,d
]+ αd∇ · τ turb,m
(4.40)
En utilisant la relation 4.19 qui dénit le tenseur des contraintes de Reynolds du mélange et la relation defermeture αd +αc = 1, les deux derniers termes de l'équation 4.40 peuvent être ré-écrits. Par conséquent, onpeut donner une nouvelle expression de Md :
Md = αd. (ρd − ρm) .
[∂um∂t
+ um.∇um − g]
+ αd∇ ·(αc.τ turb,c
)− αc∇ ·
(αd.τ turb,d
)(4.41)
Nota Bene : si la suspension est diluée et si les particules sont susamment petites pour suivre les uctuations
turbulentes du uide, les deux derniers termes peuvent être approchés par ∇ ·(αc.τ turb,c
).
On a étudié plus haut le cas où la seule force s'exerçant sur les particules était la force de traînée visqueuse(ie la force de Basset et la force de masse ajoutée sont négligeables). On a établi les équations 4.34 et 4.35qui permettent de donner l'expression suivante pour le terme de transfert de quantité de mouvement Md :
Md = −3
4.CD.
αd.ρcdd
. ‖uCd‖ .uCd +M′d (4.42)
où M′d est la contribution des uctuations. La comparaison des équations 4.41 et 4.42 donne :
3
4.CD.
αd.ρcdd
. ‖uCd‖ .uCd = −αd. (ρd − ρm) .
[∂um∂t
+ um.∇um − g]
− αd∇ ·(αc.τ turb,c
)+ αc∇ ·
(αd.τ turb,d
)+M′d
(4.43)
39

Chapitre 4. Modélisation macroscopique des écoulements polyphasiques
On peut ensuite multiplier cette équation par Vd/αd. En se rappelant du lien entre le diamètre dd, le volumeVd = π.d3
d/6 et la surface projetée Sd = π.d2d/4 d'une sphère, cela conduit à :
CD.
(1
2.ρc. ‖uCd‖ .uCd
).Sd = −Vd. (ρd − ρm) .
[∂um∂t
+ um.∇um − g]
− Vdαd.[αd∇ ·
(αc.τ turb,c
)− αc∇ ·
(αd.τ turb,d
)−M′d
] (4.44)
Cette relation est dicile à résoudre. Pour contourner ce problème, on considère que la vitesse de glissementuCd est la somme de deux termes :
uCd ≡ uCd0 + uCd, turb (4.45)
Le premier terme, uCd0, est la solution de l'équation 4.44 sans les termes liés à la turbulence. Concrètement,uCd0 est solution de l'équation suivante :
CD.
(1
2.ρc. ‖uCd0‖ .uCd0
).Sd = −Vd. (ρd − ρm) .
[∂um∂t
+ um.∇um − g]
(4.46)
Le deuxième terme décrit l'inuence de la turbulence sur la vitesse de glissement. Par analogie avec ladiusion, on considère que l'inuence des uctuations est proportionnelle au gradient local de composition :
uCd, turb ≡DCd
αd.∇αd (4.47)
Dans cette équation constitutive, αd désigne la fraction volumique de la phase dispersée et DCd le coecientde diusion de la phase dispersée dans la phase continue (avec contributions brownienne et turbulente).
Pour synthétiser, les trois équations du modèle ASM sont l'équation de conservation de la masse àl'échelle du mélange 4.14, le bilan de quantité de mouvement 4.38 que l'on peut réécrire (en tenant comptede l'équation de fermeture 4.26) sous la forme :
∂ρmum∂t
+∇ · (ρmum.um) = −∇pm +∇ ·[(µm + µ turb,m) .
((∇um) + (∇um)
> − 2
3ρm.Km.I
)]−∇ · (ρm.cd. (1− cd) .uCd0.uCd0) + ρm.g
(4.48)
On a également l'équation de conservation de la masse pour la phase dispersée :
∂αd∂t
+∇ · (αdum −DMd.∇αd) = −∇ · (αd. (1− cd) .uCd0) (4.49)
où le coecient de diusion DMd est lié au coecient de diusion DCd par :
DMd ≡ (1− Cd) .DCd (4.50)
Dans un milieu turbulent, on peut prendre (Bakker et al., 1994) :
DMd =dd.√Km
18.αd(4.51)
où Km est l'énergie cinétique turbulente.
40

Chapitre 5
Annexe
5.1 Nomenclature
Caractères latins
Symbole Désignation Dimension Unitéa Surface spécique [L−1] m−1
C Concentration totale en particulesCoecient de frottement [-] -
d Diamètre d'une particule [L] mEc Energie cinétique [M.L2.T−2] JF Force [M.L.T−2] NI ? (voir force de masse ajoutée)k Perméabilité [L2] m2
M Moment de la densité de populationm Masse d'une particule [M] kgn Densité de populationR Rayon d'une particule [L] mRe Nombre de Reynolds [-] -T Tortuosité [-] -U Vitesse [L.T−1] m.s−1
V Volume de la particule [L3] m3
Caractères grecs
Symbole Désignation Dimension Unitéγ Vitesse de cisaillement [T−1] s−1
Φ Fraction volumique en phase dispersée - -µ Viscosité dynamique (µ = ν/ρ) [M.L−1.T−1] Pa.sν Viscosité cinématique [L2.T−1] 1 cSt = 10−6
m2.s−1
Ω Vitesse angulaire [T−1] rad.s−1
ρ Masse volumique [M.L−3] kg.m−3
Exposants
41
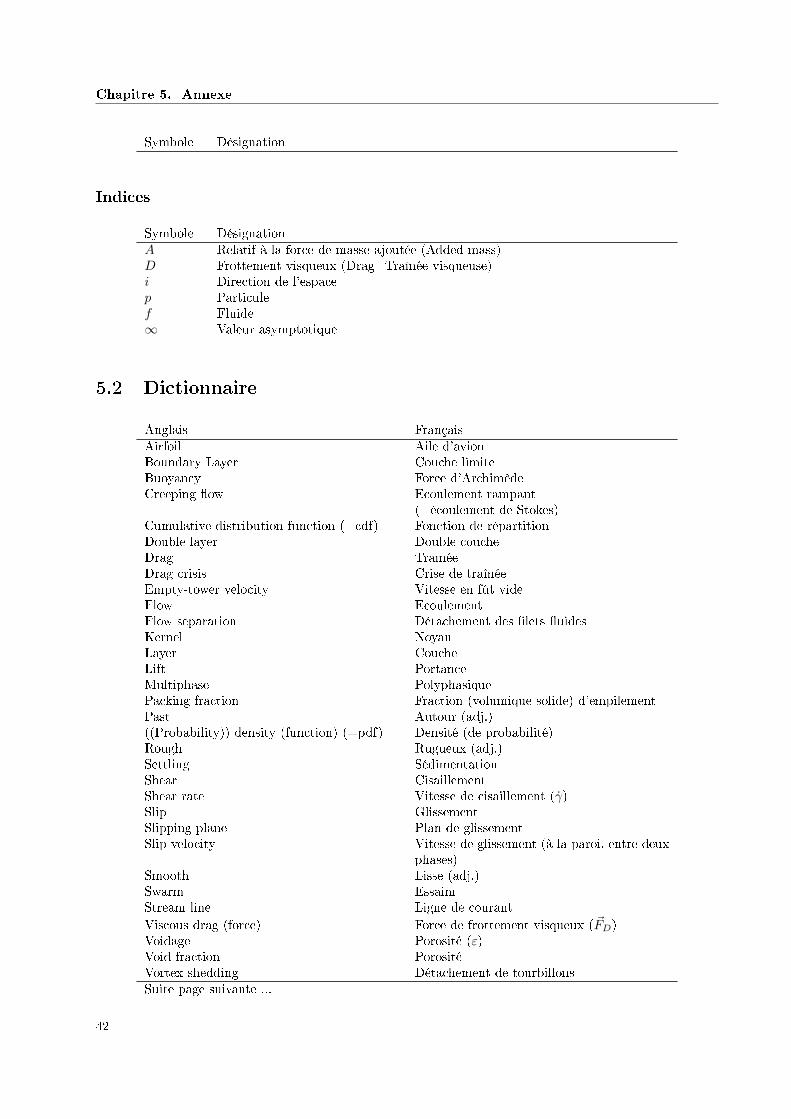
Chapitre 5. Annexe
Symbole Désignation
Indices
Symbole DésignationA Relatif à la force de masse ajoutée (Added mass)D Frottement visqueux (Drag=Traînée visqueuse)i Direction de l'espacep Particulef Fluide∞ Valeur asymptotique
5.2 Dictionnaire
Anglais FrançaisAirfoil Aile d'avionBoundary Layer Couche limiteBuoyancy Force d'ArchimèdeCreeping ow Ecoulement rampant
(=écoulement de Stokes)Cumulative distribution function (=cdf) Fonction de répartitionDouble layer Double coucheDrag TraînéeDrag crisis Crise de traînéeEmpty-tower velocity Vitesse en fût videFlow EcoulementFlow separation Détachement des lets uidesKernel NoyauLayer CoucheLift PortanceMultiphase PolyphasiquePacking fraction Fraction (volumique solide) d'empilementPast Autour (adj.)((Probability)) density (function) (=pdf) Densité (de probabilité)Rough Rugueux (adj.)Settling SédimentationShear CisaillementShear rate Vitesse de cisaillement (γ)Slip GlissementSlipping plane Plan de glissementSlip velocity Vitesse de glissement (à la paroi, entre deux
phases)Smooth Lisse (adj.)Swarm EssaimStream line Ligne de courant
Viscous drag (force) Force de frottement visqueux (~FD)Voidage Porosité (ε)Void fraction PorositéVortex shedding Détachement de tourbillonsSuite page suivante ...
42
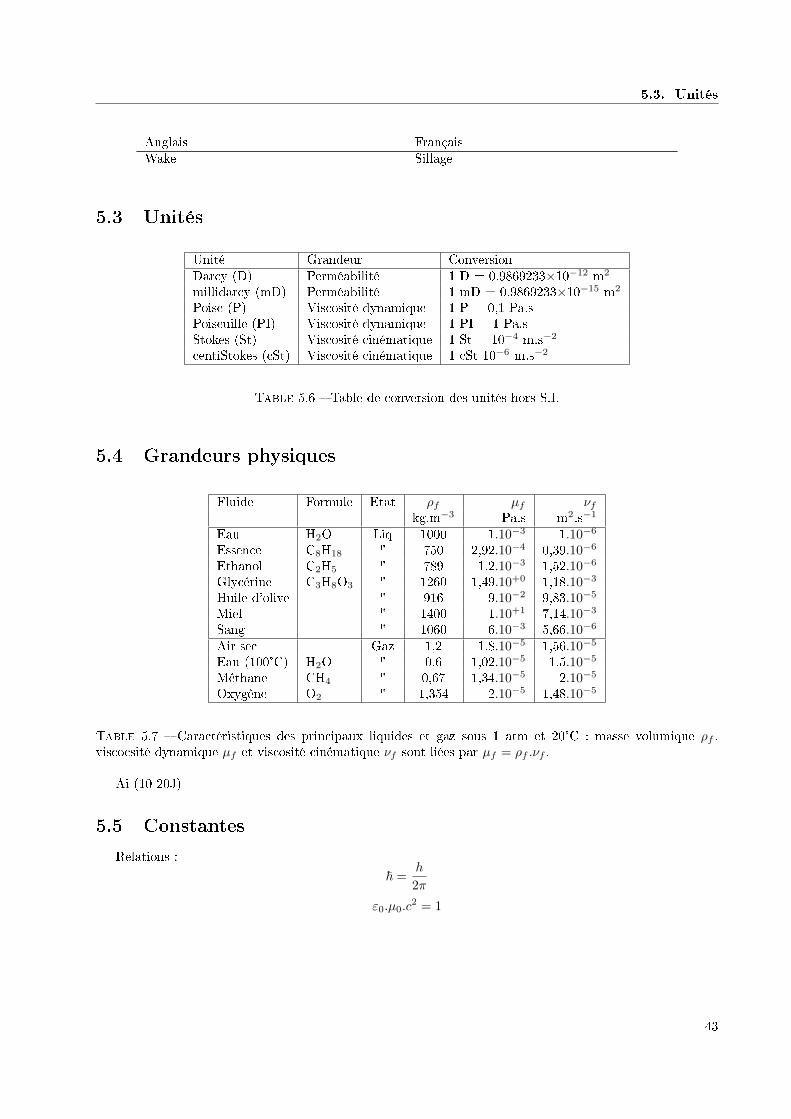
5.3. Unités
Anglais FrançaisWake Sillage
5.3 Unités
Unité Grandeur ConversionDarcy (D) Perméabilité 1 D = 0,9869233×10−12 m2
millidarcy (mD) Perméabilité 1 mD = 0,9869233×10−15 m2
Poise (P) Viscosité dynamique 1 P = 0,1 Pa.sPoiseuille (PI) Viscosité dynamique 1 PI = 1 Pa.sStokes (St) Viscosité cinématique 1 St = 10−4 m.s−2
centiStokes (cSt) Viscosité cinématique 1 cSt 10−6 m.s−2
Table 5.6 Table de conversion des unités hors S.I.
5.4 Grandeurs physiques
Fluide Formule Etat ρf µf νfkg.m−3 Pa.s m2.s−1
Eau H2O Liq 1000 1.10−3 1.10−6
Essence C8H18 " 750 2,92.10−4 0,39.10−6
Ethanol C2H5 " 789 1,2.10−3 1,52.10−6
Glycérine C3H8O3 " 1260 1,49.10+0 1,18.10−3
Huile d'olive " 916 9.10−2 9,83.10−5
Miel " 1400 1.10+1 7,14.10−3
Sang " 1060 6.10−3 5,66.10−6
Air sec Gaz 1,2 1,8.10−5 1,56.10−5
Eau (100°C) H2O " 0,6 1,02.10−5 1,5.10−5
Méthane CH4 " 0,67 1,34.10−5 2.10−5
Oxygène O2 " 1,354 2.10−5 1,48.10−5
Table 5.7 Caractéristiques des principaux liquides et gaz sous 1 atm et 20°C : masse volumique ρf ,viscocsité dynamique µf et viscosité cinématique νf sont liées par µf = ρf .νf .
Ai (10-20J)
5.5 Constantes
Relations :
~ =h
2π
ε0.µ0.c2 = 1
43

Chapitre 5. Annexe
Matériau Formule ρpkg.m−3
Acier 7800Aluminium Al 2700Béton 2200Bois (hêtre) 800Bois (peuplier) 400Calcite CaCO3 2800Carbone (graphite) C 2250Cuivre Cu 8900Fer Fe 7900Or Au 19300Polyéthylène 930Polypropylène 880Polystyrène 1050Platine Pt 21450Plomb Pb 11350Titane Ti 4500Uranium U 18700Verre SiO2 2500Zéolithe Silicate 2300
Table 5.8 Masse volumique ρp de diérents solides.
Matériau Formule A10−20 J
Métaux 16,2-45,5Or Au 45,3Oxydes 10,5-15,5Alumine Al2O3 15,4MgO MgO 10,5Silice SiO2 (fused) 6,5Silice SiO2 (quartz) 8,8Cristaux ioniques 6,3-15,3CaF2 CaF2 7,2Calcite CaCO3 10,1Polymèeres 6,15-6,6Polyvinyl chloride 10,82Polyethylene oxide 7,51Eau H2O 4,35Acetone 4,20Carbon tetrachloride 4,78Chlorobenzene 5,89Ethyl acetate 4,17Hexane 4,32Toluene 5,40
Table 5.9 Constantes de Hamaker pour quelques matériaux courants.
44
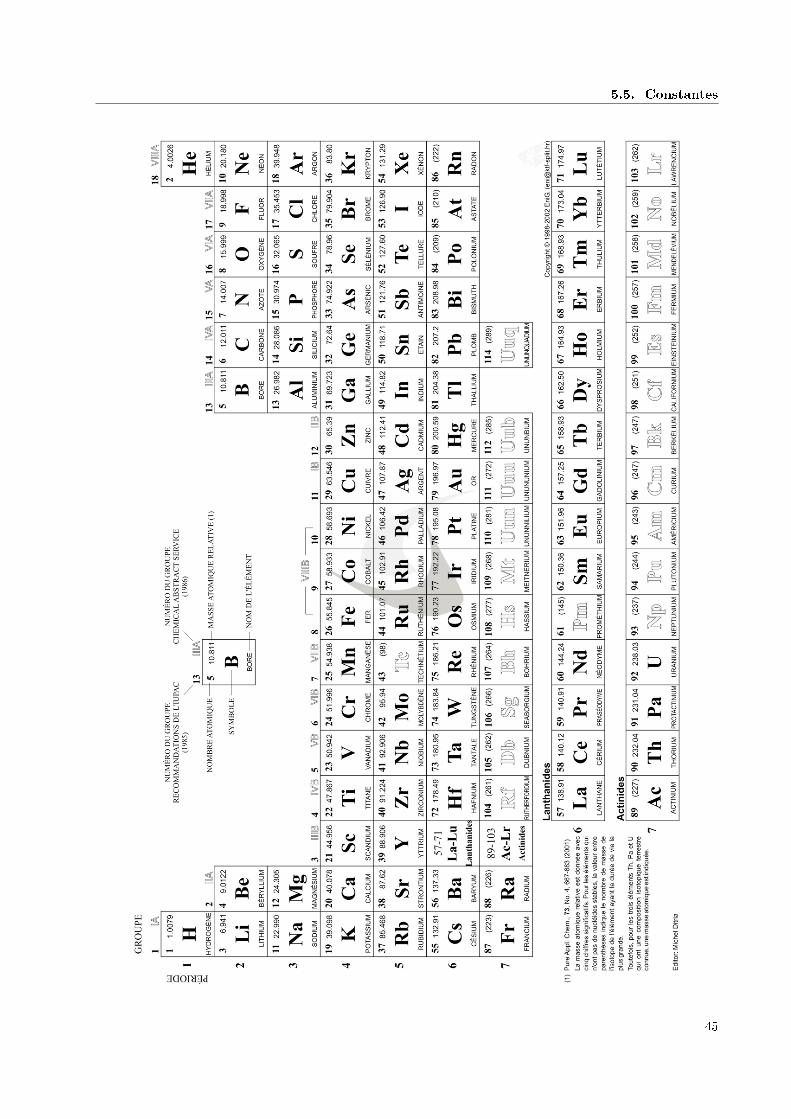
5.5. Constantes
45

Chapitre 5. Annexe
Constante Nom Valeurc Vitesse de la lumière 299792458 m.s−1
e Charge élémentaire 1, 602176565× 10−19 Cε0 Constante électrique 8, 85418782× 10−12 kg−1.m−3.A2.s4
(= permittivité diélectrique du vide)g Constante de gravitation 9, 81 m.s−2
h Constante de Planck 6, 62606957× 10−34 J.s~ Constante de Planck réduite 1, 054571726× 10−34 J.skB Constante de Boltzmann 1, 3806488× 10−23 J.K−1
µ0 Constante magnétique 4π × 10−7 kg.m.A−2.s−2
(= perméabilité magnétique du vide)NA Nombre d'Avogadro 6, 02214129× 1023 mol−1
π Nombre Pi 3, 14159265359
Table 5.10 Valeurs des constantes physiques.
46
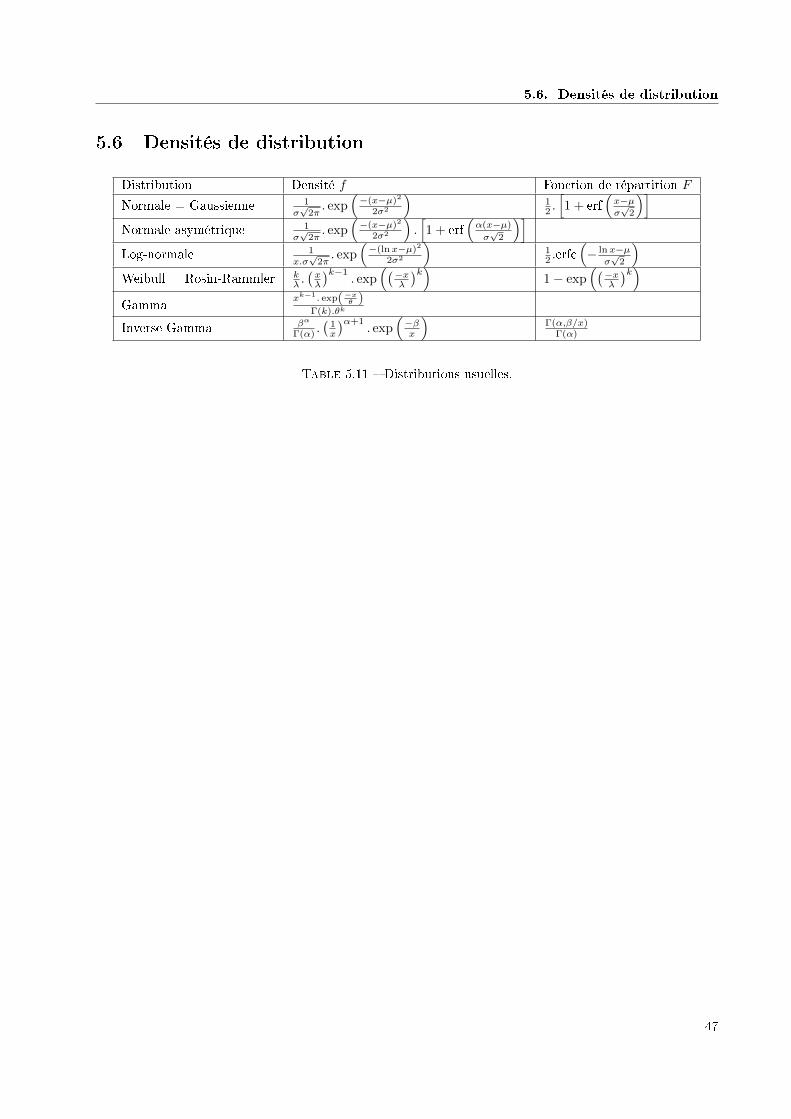
5.6. Densités de distribution
5.6 Densités de distribution
Distribution Densité f Fonction de répartition F
Normale = Gaussienne 1σ√
2π. exp
(−(x−µ)2
2σ2
)12 .[1 + erf
(x−µσ√
2
)]Normale asymétrique 1
σ√
2π. exp
(−(x−µ)2
2σ2
).[1 + erf
(α(x−µ)
σ√
2
)]Log-normale 1
x.σ√
2π. exp
(−(ln x−µ)2
2σ2
)12 .erfc
(− ln x−µ
σ√
2
)Weibull = Rosin-Rammler k
λ .(xλ
)k−1. exp
((−xλ
)k)1− exp
((−xλ
)k)Gamma
xk−1. exp(−xθ )
Γ(k).θk
Inverse-Gamma βα
Γ(α) .(
1x
)α+1. exp
(−βx
)Γ(α,β/x)
Γ(α)
Table 5.11 Distributions usuelles.
47
Chapitre 5. Annexe
5.7 Références bibliographiques
Le lecteur curieux pourra consulter les ouvrages suivants : On the mixture model for multiphase ow, M. Manninen, V. Taivassalo et S. Kallio, VTT Publications
288, 1996 Cours en ligne "Mines" : http://nte.mines-albi.fr/CristalGemme/co/_CG2.html Cours de G. Ahmadi (Univ. Clarkson) : http://web2.clarkson.edu/projects/crcd/me537/downloads/ Gouttes dans les nuages par Falkovitch : https://www.oca.eu/clouds-turbulence/clouds_prog_
files/Falkovich.pdf
48
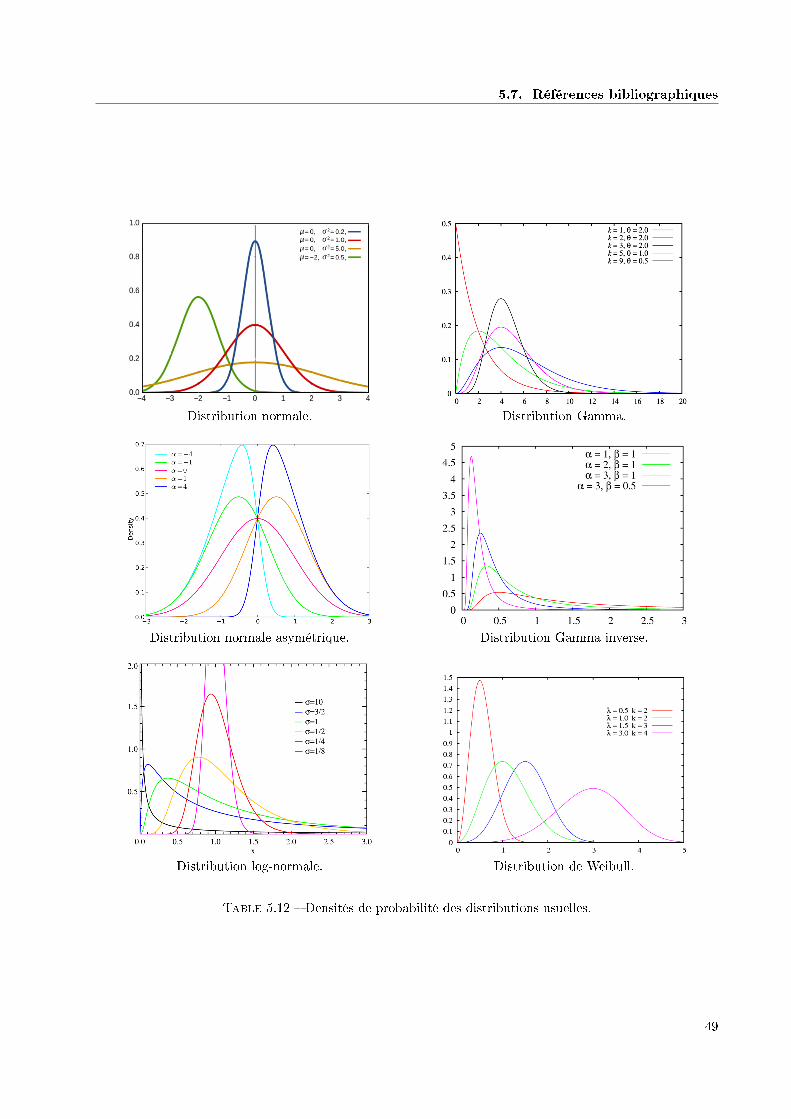
5.7. Références bibliographiques
Distribution normale. Distribution Gamma.
Distribution normale asymétrique. Distribution Gamma inverse.
Distribution log-normale. Distribution de Weibull.
Table 5.12 Densités de probabilité des distributions usuelles.
49

Chapitre 5. Annexe
50
Bibliographie
[1] R Clift, JR Grace, and ME Weber. Bubbles, drops and particles. Academic, New York, pages 171202,1978. 6, 8, 9
[2] Drag coecient of smooth sphere. http://commons.wikimedia.org/wiki/File:Drag_coefficient_
of_a_sphere_as_a_function_of_Reynolds_number.png. Accessed : 2017-01-20. 7
[3] SchillerNauman. A drag coecient correlation. Z.Ver.Deutsch.Ing, 77 :318320, 1935. 7
[4] Carl Wilhelm Oseen. Ueber den gueltigkeitsbereich der stokesschen widerstandsformel. Friedländer,1913. 6
[5] SI Rubinow and Joseph B Keller. The transverse force on a spinning sphere moving in a viscous uid.Journal of Fluid Mechanics, 11(03) :447459, 1961. 10
[6] Eet magnus sur un ballon de basket. https://www.youtube.com/watch?v=2OSrvzNW9FE&feature=
youtu.be&list=PLCRHG7EIFlDrT8bKNbfZUzbu4vd_bNVGG. Accessed : 2017-01-20. 11
[7] Illustration de l'eet magnus sur un tir du footballeur geraldao. https://www.youtube.com/watch?v=Wcy_ldfqNBY. Accessed : 2017-01-20. 11
[8] Illustration de l'eet de masse ajoutée. https://www.youtube.com/watch?v=g5ihS9QFAP0. Accessed :2017-01-20. 12
[9] Eugene J Chang and Martin R Maxey. Unsteady ow about a sphere at low to moderate reynoldsnumber. part 1. oscillatory motion. Journal of Fluid Mechanics, 277 :347379, 1994. 14
[10] Eugene J Chang and Martin R Maxey. Unsteady ow about a sphere at low to moderate reynoldsnumber. part 2. accelerated motion. Journal of Fluid Mechanics, 303 :133153, 1995. 14
[11] Inchul Kim, Said Elghobashi, and William A Sirignano. On the equation for spherical-particle motion :eect of reynolds and acceleration numbers. Journal of Fluid Mechanics, 367(1) :221253, 1998. 14
[12] Y Ling, JL Wagner, SJ Beresh, SP Kearney, and S Balachandar. Interaction of a planar shock wavewith a dense particle curtain : Modeling and experiments. Physics of Fluids, 24(11) :113301, 2012. 14
[13] Phillip M Lovalenti and John F Brady. The hydrodynamic force on a rigid particle undergoing arbitrarytime-dependent motion at small reynolds number. Journal of Fluid Mechanics, 256 :561605, 1993. 14
[14] N Lukerchenko. Basset history force for the bed load sediment transport. In Proceedings of the First
IAHR European Division Congress, pages 46, 2010. 14
[15] Renwei Mei, Ronald J Adrian, and Thomas J Hanratty. Particle dispersion in isotropic turbulence understokes drag and basset force with gravitational settling. Journal of Fluid Mechanics, 225 :481495, 1991.14
[16] EE Michaelides. Review - the transient equation of motion for particles, bubbles, and droplets. Journalof uids engineering, 119 :233, 1997. 14
51

Bibliographie
[17] MW Reeks and S McKee. The dispersive eects of basset history forces on particle motion in a turbulentow. The Physics of uids, 27(7) :15731582, 1984. 14
[18] EV Visitskiui and AG Petrov. Structurization of solid particles in a liquid medium under the action ofa standing ultrasonic wave eld. In Doklady Physics, volume 51, pages 328333. Springer, 2006. 14
[19] DJ Vojir and EE Michaelides. Eect of the history term on the motion of rigid spheres in a viscousuid. International journal of multiphase ow, 20(3) :547556, 1994. 14
[20] Illustration de la séparation par eet inertiel. https://www.youtube.com/watch?v=836VISByy3Q. Ac-cessed : 2017-01-20. 17
[21] Application de la séparation par eet inertiel à la détection de la malaria. https://www.youtube.com/watch?v=voE0t5_wYDA. Accessed : 2017-01-20. 17
[22] Draft kiss tumble. https://www.youtube.com/watch?v=L96htMY7GlM. Accessed : 2017-01-20. 19
[23] Vidéo de la sédimentation d'un essaim de particules. https://www.youtube.com/watch?v=
vLZR3SHXIqY. Accessed : 2017-01-20. 19
[24] J Happel and H Brenner. Low reynolds number hydrodynamics. Prentice-Hall, Englewood Clis, NJ,133, 1965. 22
[25] Corrélation d'happel. http://nte.mines-albi.fr/CristalGemme/co/uc_EcoulementMilieuPoreux.html. Accessed : 2017-01-20. 22
[26] Vidéo d'une occulation. https://www.youtube.com/watch?v=5uuQ77vAV_U. Accessed : 2017-01-20.28
52

Index
Agglomération, 23Agrégation, 23Archimède (nombre), 16Asymétrique (distribution), 45Avogadro, 44Avogadro (nombre), 25
Basset, 13Boltzmann, 44Born, 24Brisure, 23
Charge élémentaire, 44Coalescence, 23Coecient
de traînée, 6Constante
de Hamaker, 24Coriolis, 15Couche
compacte de Stern, 25diuse de Gouy-Chapman, 25
Désagrégation, 23Debye-Hückel, 25Densité de population, 1Distribution
asymétrique, 45de Rosin-Rammler, 2, 45de Weibull, 2, 45Gamma, 45gaussienne, 45inverse Gamma, 45log-normale, 2, 45normale, 45
DLVO, 23Double-couche, 25
Ecoulement potentiel, 12Equation
de Stokes-Einstein, 29Essaim, 19
oculation, 23Force
centrifuge, 15
de Basset, 13de Born, 24de Coriolis, 15de frottement visqueux, 6de London, 23de masse ajoutée, 10de Pauli, 24de portance, 7de traînée, 6de Van der Waals, 23
Fraction volumique, 1
Gamma (distribution), 45Gaussienne (distribution), 45Gouy-Chapman, 25
Hamaker, 24Happel, 22
Inverse Gamma (distribution), 45
Kolmogorov (échelle), 33
Log-normale (distribution), 2, 45London, 23
Magnus, 8Masse ajoutée, 10, 11Monodisperse, 2
Nombred'Archimède, 16d'Avogadro, 25de Reynolds, 6de Stokes, 16
Normale (distribution), 45Noyau, 28
Particules, 1Pauli, 24Perméabilité, 21Phase
continue, 1dispersée, 1
PIV, 17Planck, 44Polydisperse, 2
53

Index
Porosité, 1Potentiel des vitesses, 12
Reynolds (nombre), 6Rosin-Rammler (distribution), 2, 45Rubinow-Keller, 8
Saman, 10Sauter, 4Stern, 25Stokes, 6
sillages, 6Stokes (nombre), 16Stokes-Einstein, 29Système
polyphasique, 1
Tortuosité, 22
Van Allen, 6Van der Waals, 23Vitesse
de diusion, 35en fût vide, 21relative, 6supercielle, 21terminale, 16
Weibull (distribution), 2, 45
54














