Embed Size (px)
Citation preview

Introduction aux systèmes temps réelFrank Singhoff
Bureau C-203
Université de Brest, France
Laboratoire Lab-STICC UMR CNRS 6285
UE systèmes temps réel Univ. Brest/Lab-STICC Page 1/35

Sommaire
1. Concepts de base.
2. A propos du temps réel dans les systèmes tempspartagés.
3. Cycle de vie d’un système temps réel.
4. Résumé.
5. Références.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 2/35

Présentation, définitions (1)
• "En informatique temps réel, le comportement correct d’un systèmedépend, non seulement des résultats logiques des traitements, mais aussidu temps auquel les résultats sont produits" [STA 88].
• Objectifs :
Déterminisme logique : les mêmes entrées appliquées au systèmeproduisent les mêmes résultats.
Déterminisme temporel : respect des contraintes temporelles (ex :échéance).
Fiabilité : le système répond à des contraintes de disponibilité(fiabilité du logiciel et du matériel).
=⇒ Système prédictible : on cherche à déterminer a priori si le systèmeva répondre aux exigences temporelles.
• Un système temps réel n’est pas un système "qui va vite" mais u nsystème qui satisfait à des contraintes temporelles.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 3/35

Présentation, définitions (2)
• Exemples de grandeur [ DOR 91, DEM 99] :
La milliseconde pour les systèmes radar.
La seconde pour les systèmes de visualisation humain.
Quelques heures pour le contrôle de productionimpliquant des réactions chimiques.
24 heures pour les prévisions météo.
Plusieurs mois ou années pour les systèmes denavigation de sonde spatiale.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 4/35

Présentation, définitions (3)
• Classement des systèmes temps réel selon leurbesoin en garantie de service :
Garantie de service = niveau de respect descontraintes. Garanties déterministes, probabilistes ou“best effort”.
Systèmes temps réel dur ou critique .
Systèmes temps réel souple .
Systèmes temps réel ouvert ou fermé .
UE systèmes temps réel Univ. Brest/Lab-STICC Page 5/35
Présentation, définitions (4)
• Classement des systèmes temps réel selon leur environnement.
• Systèmes embarqués, ou Embedded systems, ou systèmesenfouis : systèmes informatiques dans lequel le processeur/calculateurest englobé dans un système plus large et/ou que le logiciel estentièrement dédié à une application donnée. (ex : une sonde spatiale, untéléphone mobile).
• Systèmes répartis : "Un système réparti est un ensemble de machinesautonomes connectées par un réseau, et équipées d’un logiciel dédié à lacoordination des activités du système ainsi qu’au partage de sesressources." Coulouris et al. [COU 94].
• Système réparti temps réel pour des raisons de :
Fiabilité (redondance).
Contraintes physiques, commerciales, industrielles.
Partage des ressources (données, périphériques, ... ).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 6/35

Présentation, définitions (5)
• Problèmes liés aux systèmes embarqués :
Intervention humaine directe difficile voire impossible(contre-exemple : PathFinder).
• Problèmes liés aux systèmes répartis :
Localisation des ressources.
Hétérogénéité (matériel et logiciel).
Performance.
Peu de problèmes de synchronisation et de cohérencedans le contexte temps réel (ex : mise au point, e-mail).
Autres : sécurité, maintenance.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 7/35

Exemple 1 : domaine de l’avionique
• Système temps réel critique :
Contraintes temporelles : temps de réponse, échéance, dated’exécution au plus tôt, cadence, etc.
Dimensionnement au pire cas et réservation des ressources.
Utilisation de redondance matérielle et logicielle.
Matériel et logiciel dédiés. Système fermé, validé a priori.
Système réparti synchrone : commandes de vol, radars, moteurs, etc
UE systèmes temps réel Univ. Brest/Lab-STICC Page 8/35

Exemple 2 : multimédia sur le Web
• Système temps réel souple :
RéseauProcesseur Processeur
Contraintes temporelles : gigue, délais de bout en bout, temps deréponse. Synchronisations intra et inter-flux.
Plate-forme généraliste. Non déterminisme temporel à cause dumatériel et du logiciel (ex : PC + windows).
Application interactive.
Nombre de flots inconnu.
Débits variables et difficiles à estimer hors ligne.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 9/35

Autres exemples d’application
• Préface d’un livre sur le temps réel souple :"This book is about real-world programming ... So real-world programs(and real-world programmers) are all around us. What characterizes all ofthese real-world applications is a critical dependence on time." [GAL 95]
Transports (métro, spatial, aéronautique, automobile).
Médias (décodeurs numériques openTV).
Services téléphoniques (téléphone mobile, auto-commutateur).
Supervision médicale, écologique.
Système de production industriel : centrale nucléaire, chaîne demontage, usine chimique.
Robotique (ex : PathFinder).
etc...
UE systèmes temps réel Univ. Brest/Lab-STICC Page 10/35

Sommaire
1. Concepts de base.
2. A propos du temps réel dans les systèmes tempspartagés.
3. Cycle de vie d’un système temps réel.
4. Résumé.
5. Références.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 11/35

Système temps partagé (1)
Abstractions + API
Matériel
Système d’exploitation
Applicatifs
• Objectifs :
Facilite l’accès aux ressources.
Masquer les ressources (multiprocesseur, disques RAID, mémoire).
Recherche de l’équité. Absence de famine. Maximise le débit global.
Sûreté des applications (protection mémoire).
Vivacité du système (inter-blocage).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 12/35
Système temps partagé (2)
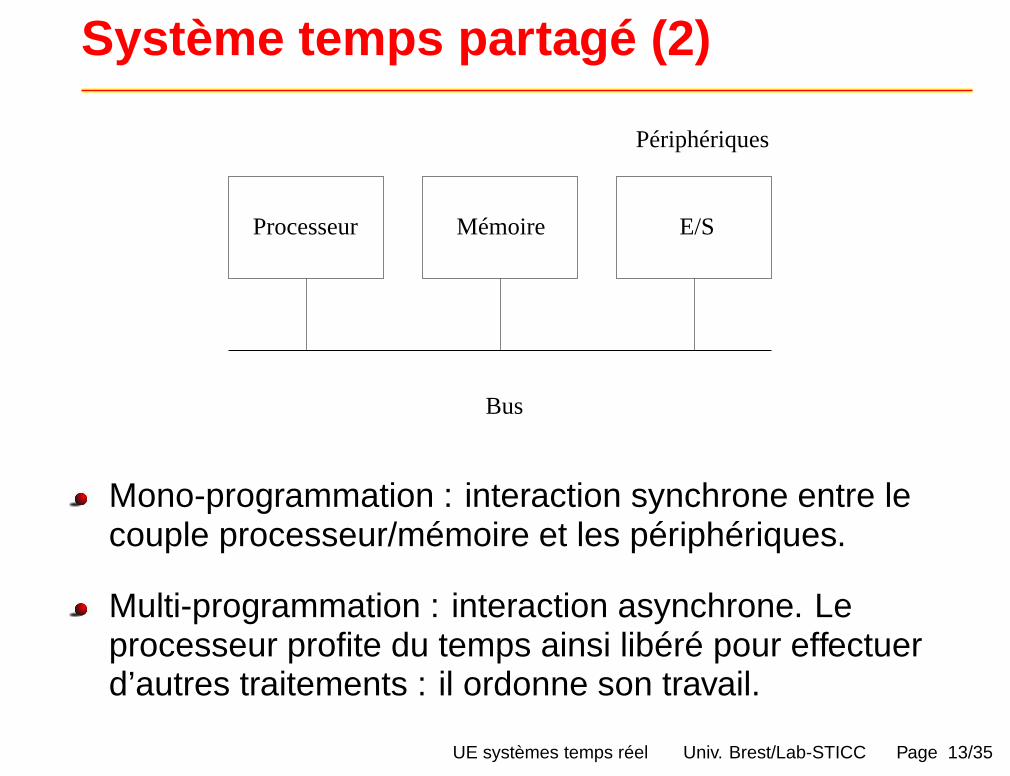
Bus
Périphériques
Mémoire E/SProcesseur
Mono-programmation : interaction synchrone entre lecouple processeur/mémoire et les périphériques.
Multi-programmation : interaction asynchrone. Leprocesseur profite du temps ainsi libéré pour effectuerd’autres traitements : il ordonne son travail.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 13/35
Le processeur (1)
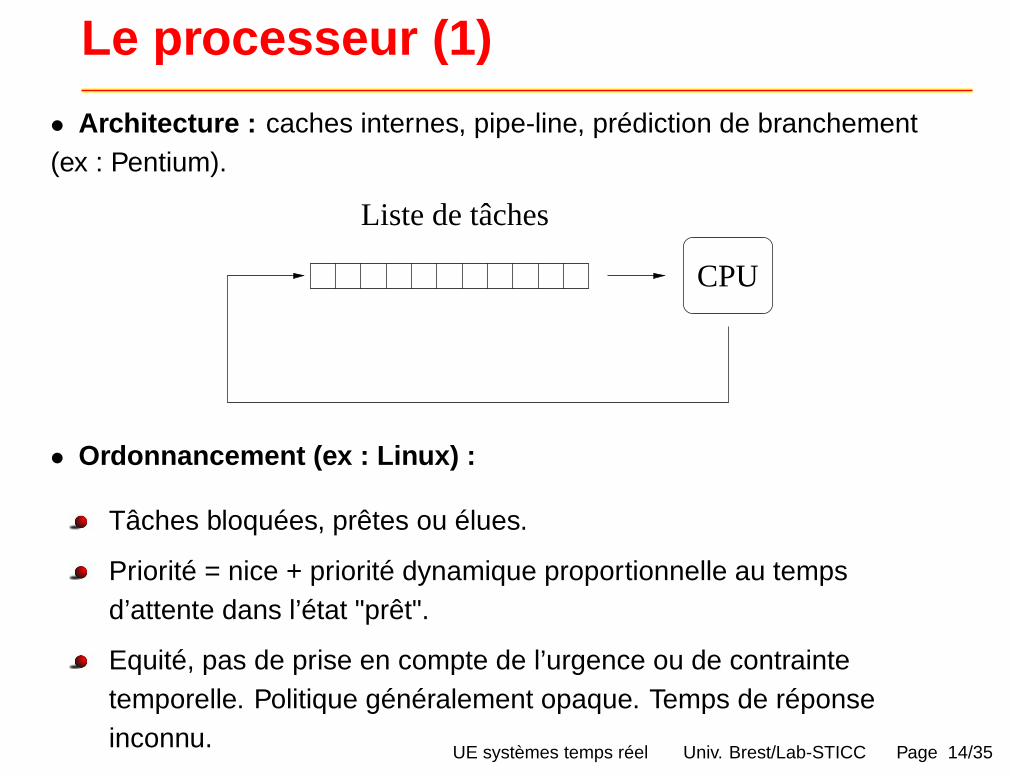
• Architecture : caches internes, pipe-line, prédiction de branchement(ex : Pentium).
CPU
Liste de tâches
• Ordonnancement (ex : Linux) :
Tâches bloquées, prêtes ou élues.
Priorité = nice + priorité dynamique proportionnelle au tempsd’attente dans l’état "prêt".
Equité, pas de prise en compte de l’urgence ou de contraintetemporelle. Politique généralement opaque. Temps de réponseinconnu.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 14/35

Le processeur (2)
=⇒ Utilisation d’ordonnanceurs spécialisés (priorité, préemption, etc ).
������������������������������
������������������������������
������������
������������
������������������
������������������
������������������
������������������
������������
������������
������
������
������
������
CiSi
k.Pi ....(k+1).Pi (k+2).Pi
<= Di
• Modèle de tâches de Liu et Layland [ LIU 73] :
Tâches périodiques et indépendantes.
Borne maximale sur le temps d’exécution : Ci (capacité).
Période d’activation : Pi.
Arrivée de la tâche dans le système : Si.
Délai critique relatif à la période : Di.
Echéance sur requête : Di = Pi.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 15/35
Le processeur (3)
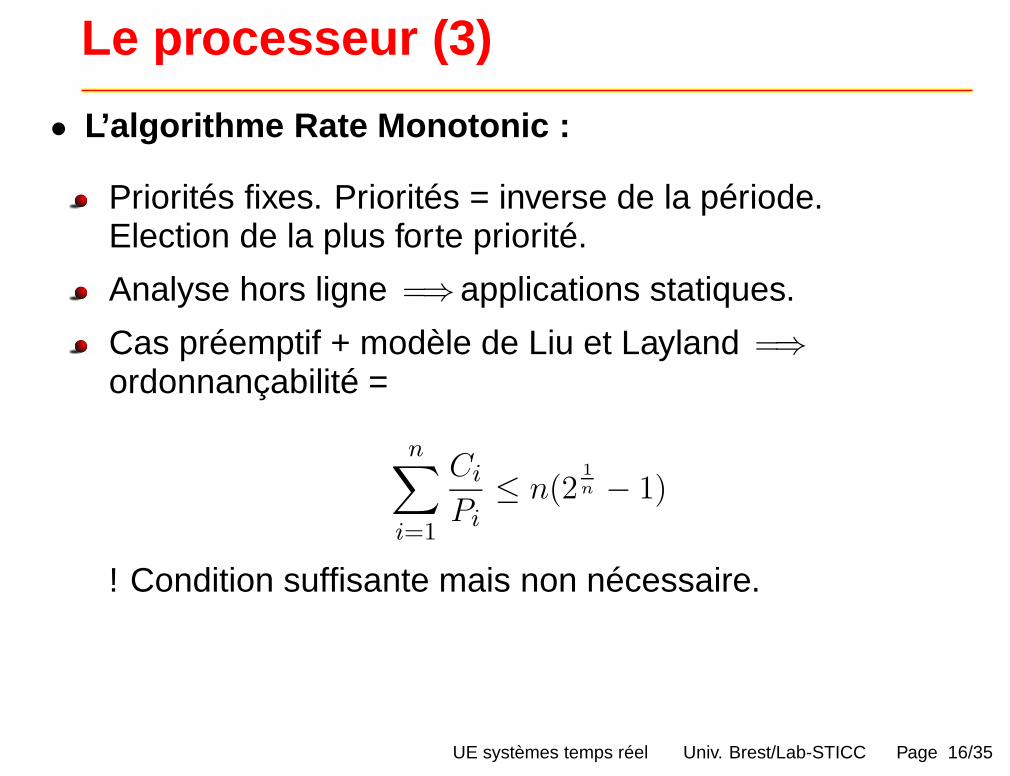
• L’algorithme Rate Monotonic :
Priorités fixes. Priorités = inverse de la période.Election de la plus forte priorité.
Analyse hors ligne =⇒applications statiques.
Cas préemptif + modèle de Liu et Layland =⇒ordonnançabilité =
n∑
i=1
Ci
Pi
≤ n(21
n − 1)
! Condition suffisante mais non nécessaire.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 16/35
Le processeur (4)
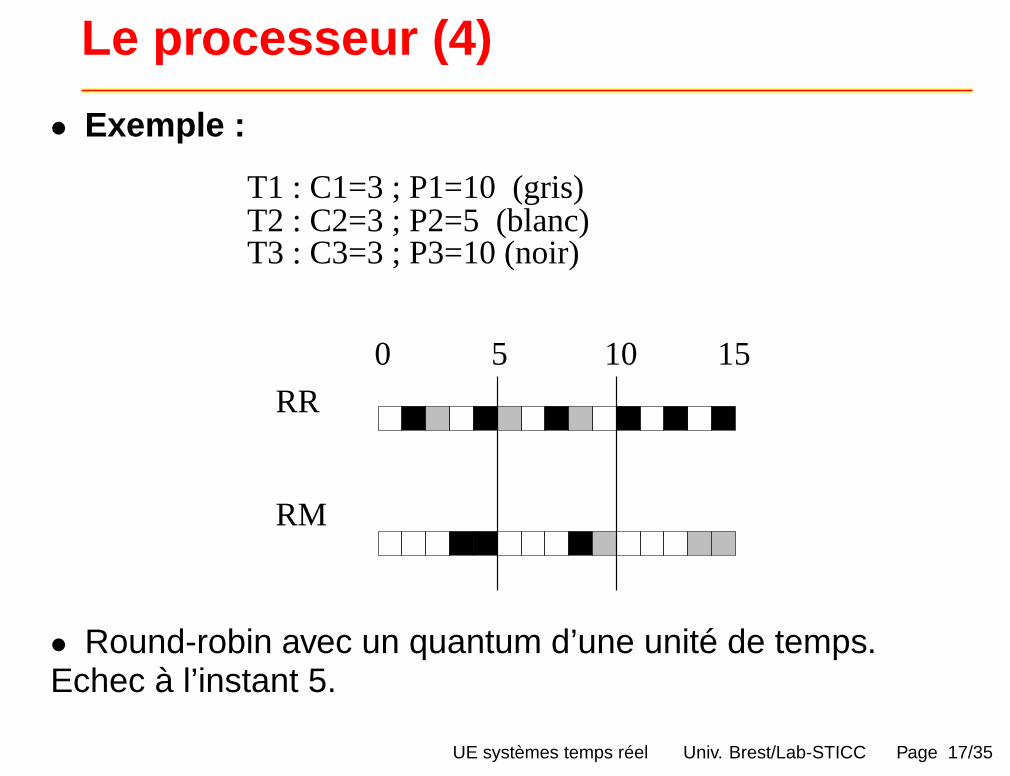
• Exemple :
T2 : C2=3 ; P2=5 (blanc)
5 0 10 15
RR
RM
T1 : C1=3 ; P1=10 (gris)
T3 : C3=3 ; P3=10 (noir)
• Round-robin avec un quantum d’une unité de temps.Echec à l’instant 5.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 17/35

Les entrées/sorties (1)
Bus
Périphériques
MémoireProcesseur
Caches
E/S
Contrôleur DMA
• Modes d’échanges :
Scrutation active de l’unité : polling. Monopolise le processeur.Comportement temporel déterministe.
Interruptions.
Accès direct à la mémoire (DMA ; Direct Memory Access).Contention sur le bus. Comportement temporel indéterministe.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 18/35

Les entrées/sorties (2)
Tâche x
Restauration
interruption
Traitement
Prise en compte
contexteSauvegarde
contexte
Tâche xinterruption
• Interruptions et préemptivité :
Priorité des interruptions non modifiable par le concepteur.
Nombre d’occurrences inconnu. Acquisition et traitement successifs=⇒ éventuellement long.
UNIX = verrouillage important, peu préemptif.
=⇒ Découplage acquisition et traitement des interruptions. Co-gestiontâches/interruptions. Noyau préemptif. Choix de matériel adapté. Polling.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 19/35
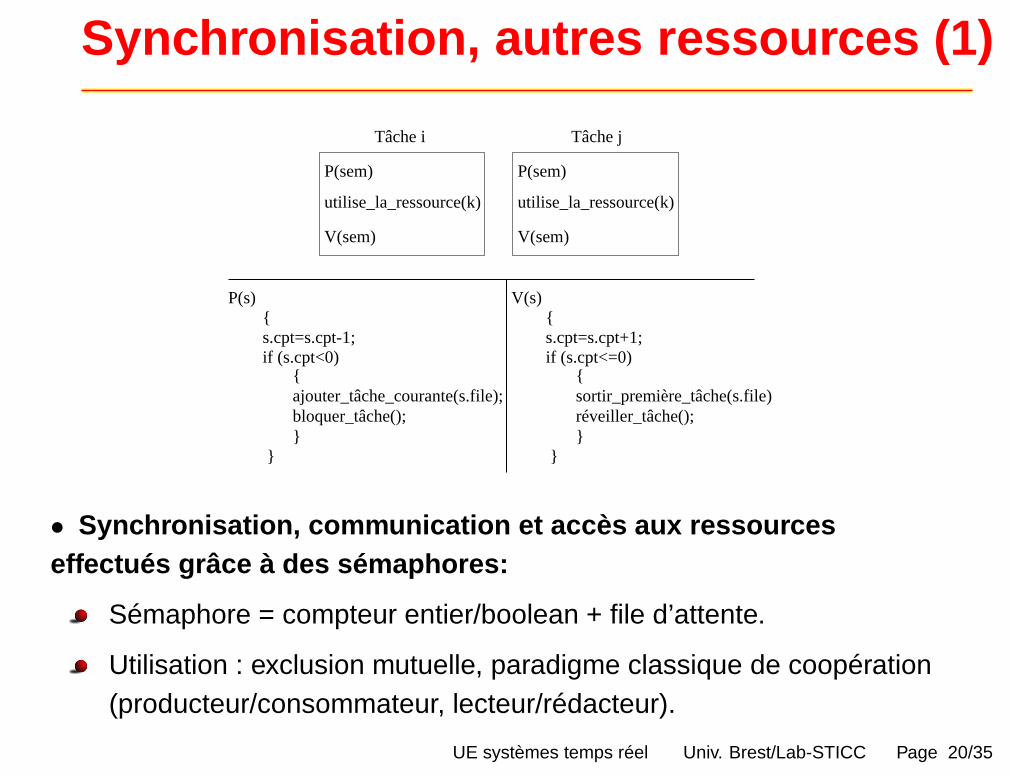
Synchronisation, autres ressources (1)
P(sem)
V(sem)
utilise_la_ressource(k)
P(sem)
V(sem)
utilise_la_ressource(k)
Tâche jTâche i
s.cpt=s.cpt-1; if (s.cpt<0)
}
P(s) {
}
{ ajouter_tâche_courante(s.file); bloquer_tâche();
{
} }
V(s)
s.cpt=s.cpt+1;
{
réveiller_tâche(); sortir_première_tâche(s.file);
if (s.cpt<=0)
• Synchronisation, communication et accès aux ressourceseffectués grâce à des sémaphores:
Sémaphore = compteur entier/boolean + file d’attente.
Utilisation : exclusion mutuelle, paradigme classique de coopération(producteur/consommateur, lecteur/rédacteur).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 20/35

Synchronisation, autres ressources (2)
P(mutex)
P(mutex)
Arrivée
Bloquée
Préemptée
V(mutex)
T1
T3
T2
• Problèmes :
Impact sur l’ordonnancement car tâches bloquées.
Gestion FIFO =⇒ accès non prioritaire aux ressources.
Inversion de priorité : tâche de faible priorité bloquant une tâche deplus forte priorité pendant une durée inconnue.
=⇒ Héritage de priorité.UE systèmes temps réel Univ. Brest/Lab-STICC Page 21/35

Sommaire
1. Concepts de base.
2. A propos du temps réel dans les systèmes tempspartagés.
3. Cycle de vie d’un système temps réel.
4. Résumé.
5. Références.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 22/35

Génie logiciel et temps réel (1)
• Génie logiciel = méthodes, modèles et ateliers préconisés pourmaîtriser la qualité des produits, leur coût et le respect des délais.
• Spécificités des applications temps réel :
Concurrentes et synchronisées. Manipulation du temps.
Coût de développement trés lourd (validation temporelle et logique,applications peu flexibles).
Maintenance souvent impossible (téléphone mobile, sonde spatiale)=⇒ erreur souvent irréversible.
Conséquences tragiques (vies humaines, faillites économiques).
=⇒ Utilisation de méthodes, outils afin d’éviter au mieux tous c es
pièges.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 23/35

Génie logiciel et temps réel (2)
du logiciel
Conception du
Codage/réalisationdu logiciel
Recette/ validationdu logiciel
Tests unitaires
du logicielpuis d’intégration
Spécification
logiciel
• Spécification = quoi faire ? Conception = comment faire ?• Notions de méthodes, modèles et outils.• Couverture partielle ou totale du cycle. La "couverture"dépend aussi du domaine applicatif. Un modèle peutcouvrir plusieurs phases d’un projet.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 24/35

Génie logiciel et temps réel (3)
• Vérifications amont d’un système.• Etude AMRDEC:
70% des anomalies sont introduites lors de la phase deconception.
3% d’entre elles trouvées lors de la conception. Cout :x1
Test unitaire : détection supplémentaire de 20% desanomalies. Cout : x5
Test d’intégration : détection supplémentaire de 10%des anomalies. Cout : x16
• Objectifs: trouver le plus d’anomalies lors de la phasede conception => Vérifications en amont.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 25/35

Génie logiciel et temps réel (4)
1. Méthodes de spécification et de conception :Analyse d’ordonnancement.Réseaux de Petri.
2. Environnement d’exécution et de développement :Exécutifs temps réel embarqués.Langages pour le temps réel.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 26/35
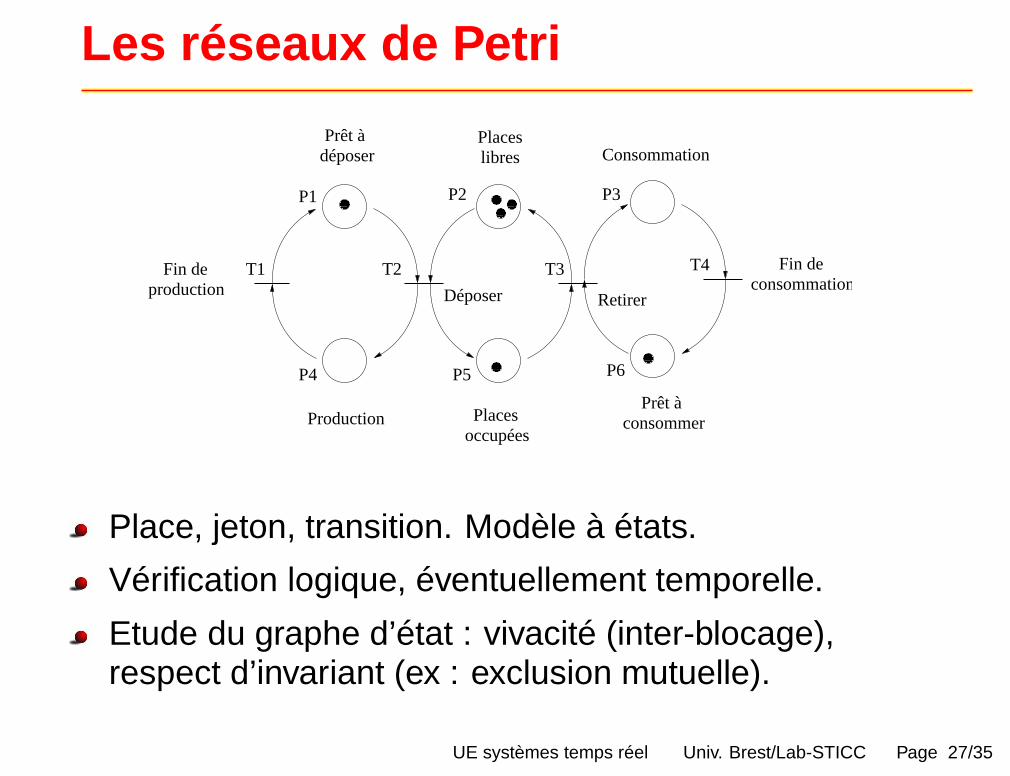
Les réseaux de Petri
Prêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Consommation
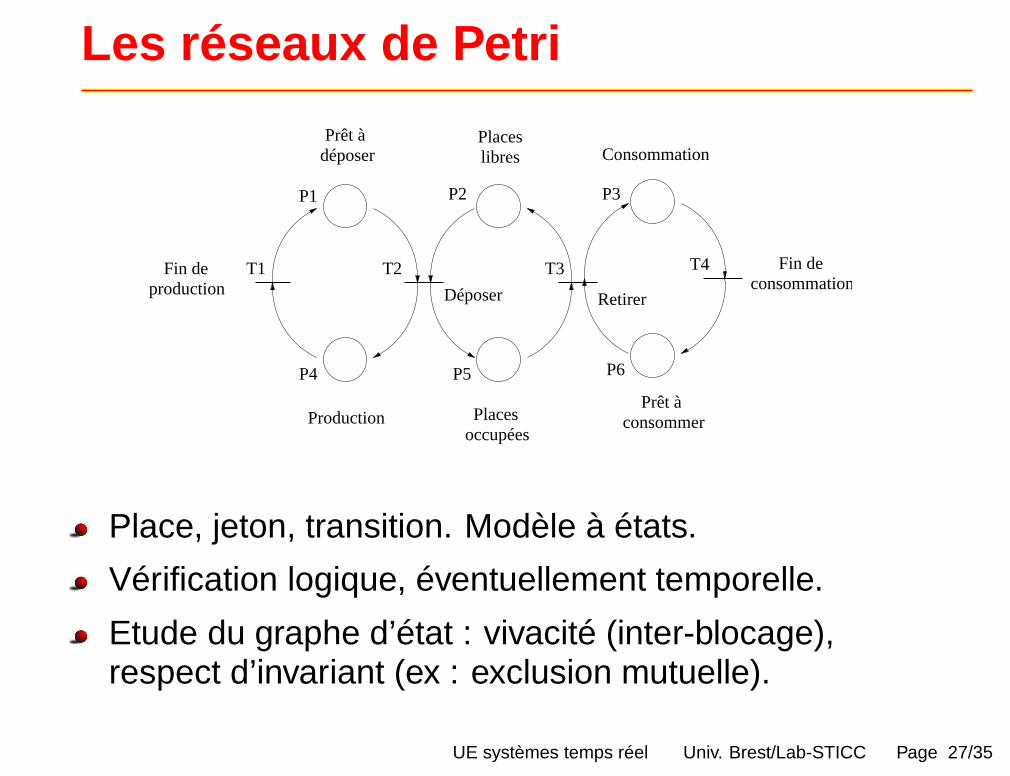
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
���
���
��������
��������
�����������
���
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
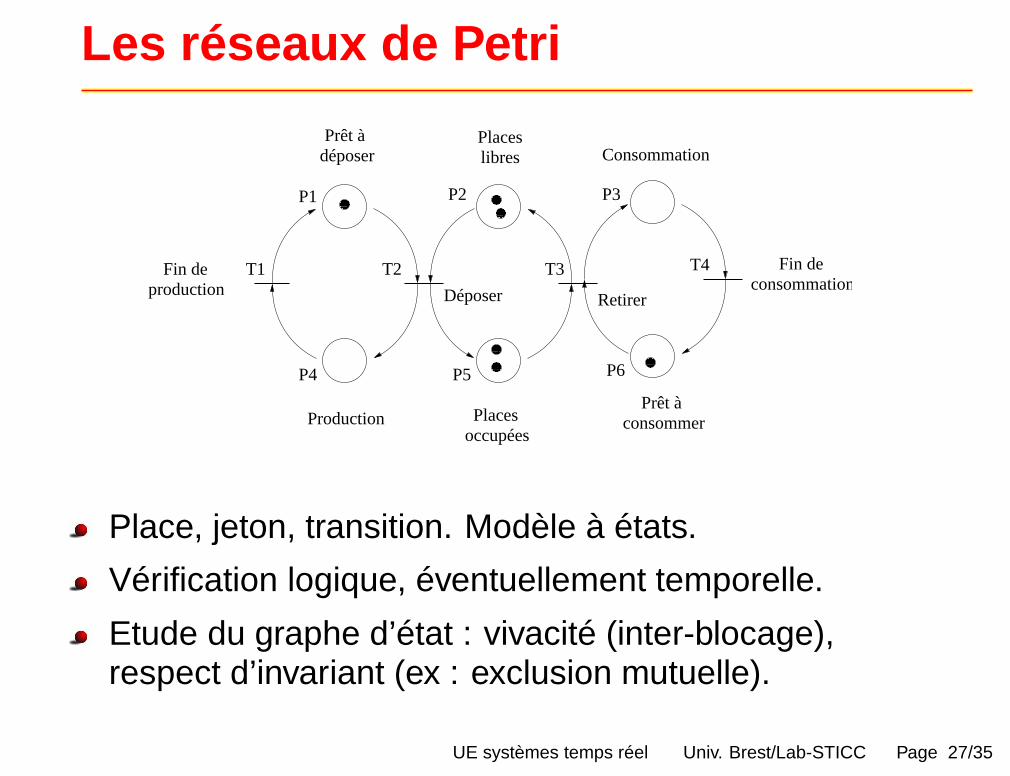
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
���
���
��������
�����������
���
��������
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
���
������
���
�������� ��
����
������
����
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35
Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
���
������
���
��������
����
����
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
���
���
��������
������������ �
��
���
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35
Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
���
���
��������
������������
��������
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
��������
������������
��������
������
������
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Les réseaux de Petri
ConsommationPrêt àdéposer
Fin deproduction
Placeslibres
Placesoccupées
Prêt àconsommer
P1
Fin deconsommation
���
���
��������
������������
��������
����
Production
T1 T3
Retirer
T4T2
P5P4 P6
P2 P3
Déposer
Place, jeton, transition. Modèle à états.
Vérification logique, éventuellement temporelle.
Etude du graphe d’état : vivacité (inter-blocage),respect d’invariant (ex : exclusion mutuelle).
UE systèmes temps réel Univ. Brest/Lab-STICC Page 27/35

Exécutif et OS temps réel (1)1. Exécutif (ou moniteur) :
Système de faible envergure (ex : pour application embarquée).
Collection de primitives =⇒ édition de liens.
Parfois mono-programmé (systèmes cycliques, calendrier). Avec ou sansprotection mémoire.
Environnement de compilation croisée.
2. Système d’exploitation :
Interaction par appels systèmes.
Système multi-programmé (souvent POSIX).
Avec ou sans environnement de compilation croisée.
AEnvironnements spécifiques. Exemple : compilation
croisée
UE systèmes temps réel Univ. Brest/Lab-STICC Page 28/35

Exécutif et OS temps réel (2)
• La compilation croisée :
séries, etcEthernet , liens. TCP/IP sur
. TFTP, NFSEnvironnement dedéveloppement
Disque NFS
Machine cible
Hôte (windows)
OS temps réel
rsh
GDB RGDB
UE systèmes temps réel Univ. Brest/Lab-STICC Page 29/35
Langage pour le temps réel (1)
• Principaux critères de choix :
Déterminisme temporel et logique validés. Fiabilité.
Présence d’abstractions "temps réel" (tâches,synchronisation, horloges, etc).
Accès aux ressources de bas niveau.
Portabilité, normalisation.
Compilation séparée.
Performance.
• Deux approches : langages de bas niveau et de hautniveau.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 30/35

Langage pour le temps réel (2)
• Langages de bas niveau : C/C++, Assembleur.
Largement diffusés et utilisés à ce jour.
Accès direct aux ressources de bas niveau. Idéal pourles E/S.
Doit être couplé avec les services du système (poursynchronisation, ordonnancement) =⇒bibliothèques.
Langage généralement restreint (sous-partie ayant uncomportement temporel déterministe facile à évaluer).
Peu adapté aux logiciels complexes et/ou volumineux.
Pas de normalisation, donc peu de portabilité : logiciel“ad hoc” =⇒ comportement bibliothèques.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 31/35

Langage pour le temps réel (3)
• Langages de haut niveau : Ada 2012 [ ZAF 99]
Langage conçu, entre autres, pour le support desapplications temps réel.
Abstractions temps réel : tâche, interruption,ordonnancement (priorité fixe et dynamique),synchronisation (sémaphore), timer et gestion dutemps, outils de communication (rendez-vous).
Interface/syntaxe et COMPORTEMENT du langagenormalisés par l’ISO =⇒ forte portabilité.
Compilation séparée. Typage fort =⇒ langage trèsfiable. Adapté à la production de logiciels volumineux.
Langage complexe.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 32/35

Résumé
• Notion de base sur les systèmes temps réel : prise encompte du temps, concurrence et synchronisation.
• Contraintes spécifiques : sûreté fonctionnelle ettemporelle, répartition, environnement (systèmeembarqué), performance.
• Cycle de vie d’un système temps réel : méthodes etoutils de spécification/conception. Plates-formes dedéveloppement/exécution.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 33/35
Références (1)
[BER 98] G. Berry. « The Foundations of Esterel ». in Proof, Language and Interaction:Essays in Honour of Robin Milner, G. Plotkin, C. Stirling and M. Tofte, editors, MIT Press,1998.
[COU 94] G. Coulouris, J. Dollimore, and T. Kindberg. Distributed Systems—Concepts andDesign, 2nd Ed. Addison-Wesley Publishers Ltd., 1994.
[DEM 99] I. Demeure and C. Bonnet. Introduction aux systèmes temps réel. Collectionpédagogique de télécommunications, Hermès, septembre 1999.
[DOR 91] A. Dorseuil and P. Pillot. Le temps réel en millieu industriel. Edition DUNOD,Collection Informatique Industrielle, 1991.
[GAL 95] B. O. Gallmeister. POSIX 4 : Programming for the Real World . O’Reilly andAssociates, January 1995.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 34/35

Références (2)
[LIU 73] C. L. Liu and J. W. Layland. « Scheduling Algorithms for Multiprogramming in a HardReal-Time Environnment ». Journal of the Association for Computing Machinery,20(1):46–61, January 1973.
[STA 88] John Stankovic. « Misconceptions about real-time computing ». IEEE Computer,October 1988.
[ZAF 99] L. Zaffalon and P. Breguet. Programmation concurrente et temps réel avec ADA 95.Hermès, 1999.
UE systèmes temps réel Univ. Brest/Lab-STICC Page 35/35