Embed Size (px)
Citation preview
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 1
INTRODUCTION
On présente dans ce document un cours de mécanique générale nécessaire pour la formation
d’un technicien supérieur en mécanique. Ce cours est accompagné par des travaux dirigés à la
fin de chaque chapitre.
Ce document comporte trois parties :
Statique des solides
- Rappel mathématique
- Torseurs
- Etudes statique des solides
Cinématique des solides
- Paramétrage
- Rappel de géométrie vectorielle
- Cinématique du point matériel
- Cinématique des solides indéformable
Dynamique des solides
- Géométrie des masses
- Torseur cinétique
- Dynamique des solides indéformables

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 2
SOMMAIRE
Première partie : statique des solides…………………………………………………………6 Chapitre I : Rappels Mathématique……………………………………………………………7 1. Définitions …………………………………………………………………………………7 1.1.2. Propriété………………………………………………………………………………...7 1.2. Vecteur……………………………………………………………………………………7 1.2.1. Définition……………………………………………………………………………… 8 1.2.2. Propriétés………………………………………………………………………………..8 1.3. Base……………………………………………………………………………………….8
1.3.1. Définition…………………………………………………………………………….…8
1.4. Repère…………………………………………………………………………………….8 1.4.1. Définition………………………………………………………………………………………8 2. Opérations sur les vecteurs………………………………………………………………….8 2.1. Notation…………………………………………………………………………………... 8
2.2. Détermination des composantes d’un vecteur……………………………………………..8
2.3. Produit scalaire…………………………………………………………………………….9
2.4. Produit vectoriel…………………………………………………………………………..9
2.5. Double produit vectoriel………………………………………………………………....10
2.6. Produit mixte…………………………………………………………………………….10
2.7. Dérivation vectorielle……………………………………………………………………10
Chapitre II : LES TORSEURS
1. définition………………………………………………………………………………..…11
2. Propriétés…………………………………………………………………………………..12
2.1. Torseur nul………………………………………………………………………………12
2.2. Egalité de deux torseurs…………………………………………………………………12
3. opérations sur les torseurs …………………………………………………………………12
3.1. Somme de deux torseurs…………………………………………………………………12
3.2. Multiplication de deux torseurs…………………………………………………………..12
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 3
3.3. Multiplication d’un torseur par un réel………………………………………………….13
3.4. Torseur glisseur…………………………………………………………………………..13
3.5. Torseur couple……………………………………………………………………………13
3.6. Equiprojectivité………………………………………………………………………….13
3.7. Invariants d’un torseur…………………………………………………………………...13
3.8. Définition de l’axe central et du pas d’un torseur………………………………………..14
Chapitre III : ETUDES STATIQUES DES SOLIDES 1. Introduction…………………………………………………………………………………..17 2. Les systèmes de forces dans l’espace………………………………………………………17
2.1. ωomposantes d’une force………………………………………………………………..17 2.2. Force définie par son module et deux points sur sa ligne d’action………………………….18 3. Equilibre d’un point matériel………………………………………………………………18 4. Liaisons des solides………………………………………………………………………...19 4.1. Liaisons sans frottements………………………………………………………………….20
4.2. Liaisons entre solides avec frottements…………………………………………………..21
5. Système de forces………………………………………………………………………….22 5.1. Moment d’une force par rapport à un point……………………………………………...23 5.3 Théorème de VARIGNON………………………………………………………………23 6. Statique du solide…………………………………………………………………………..24 6.1. Equilibre du solide : principe fondamental de la statique (PFS) ……………………………….24 6.2. Ecriture scalaire du principe fondamental de la Statique………………………………...25 Travaux Dirigés……………………………………………………………………………….26
Deuxième partie : LA CINEMATIQUE
Chapitre I : PARAMETRAGE 1. Paramétrage d'un point par rapport à un repère…………………………………………...31 2. système de coordonnées…………………………………………………………………..31
2.1. ωoordonnées cartésiennes……………………………………………………………….31
2.2. Coordonnées cylindriques……………………………………………………………….31
2.3. Coordonnées sphériques…………………………………………………………………31
3. paramétrage de l’orientation de la base ψ1 par rapport à la base B………………………..32
Chapitre II : RAPPELS DEGEOMETRIE VECTORIELLE 1. Fonction vectorielle……………………………………………………………………….34
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 4
1.1. Propriétés………………………………………………………………………………...34 2. Dérivation d’un vecteur exprimé dans la base B de dérivation…………………………...34 3. Changement de base de dérivation vectorielle de la base B à la base ψ0…………………35
Chapitre III : CINEMATIQUE DU POINT MATERIEL 1. Vecteur vitesse d’un point M par rapport à un repère…………………………………….37 1.1. Définition……………………………………………………………………………….37 1.2. Détermination du vecteur vitesse……………………………………………………….37
2. Vecteur accélération d’un point M par rapport à un repère……………………………….39 2.1. Définition………………………………………………………………………………..39 Chapitre IV : CINEMATIQUE DE SOLIDES INDEFORMABLE 1. Champ des vitesses d’un solide indéformable…………………………………………….41
1.1. Définition………………………………………………………………………………..41
1.2. Composition des vitesses d’un solide……………………………………………………41
2. Torseur cinématique………………………………………………………………………..42
2.1. Composition……………………………………………………………………………...42
2.2. Mouvements particuliers…………………………………………………………………42
3. Cinématique des solides en contact………………………………………………………..43
3.1. Vitesse de glissement …………………………………………………………………...43
4. Vecteur roulement et Vecteur pivotement…………………………………………………43
5. Centre instantané de rotation « CIR »…………………………………………………….44
6. Différentes liaisons normalisées…………………………………………………………...44
7. Application…………………………………………………………………………………47
Travaux Dirigés……………………………………………………………………………….53
Troisième partie : DYNAMIQUE DES SOLIDES Chapitre I : GEOMETRIE DES MASSES 1. Notions de masse d’un système matériel………………………………………………….57 1.1. Définition………………………………………………………………………………..57 1.2. Grandeur de masse………………………………………………………………………57 2. ωentre d’inertie (centre de masse) des solides…………………………………………….58
3. ωentre d’inertie d’un système composé……………………………………………………58
4. Théorème de Guldin…………………………………………………………………………….58
5. moment et produit d’inertie d’inertie……………………………………………………...59
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 5
6. Opérateur d’inertie………………………………………………………………………...61
7. Théorème de HUYGENS……………………………………………………………………...63
8. matrice d’inertie de quelques solides élémentaires……………………………………….64
Travaux Dirigés………………………………………………………………………………66
Chapitre II : TORSEUR CINETIQUE
1. définition………………………………………………………………………………….69
2. Résultante cinétique………………………………………………………………………69
3. Moment cinétique…………………………………………………………………………69
4. Cas particulier…………………………………………………………………………….70
5. Energie cinétique…………………………………………………………………………..71
Chapitre III : DYNAMIQUE DES SOLIDES INDEFORMABLES
1. Définition…………………………………………………………………………………72
2. Torseur dynamique………………………………………………………………………..72
4. Cas particulier…………………………………………………………………………….73
5. principe fondamental de la dynamique…………………………………………………….73
Chapitre IV : PUISSANCE ET TRAVAIL
1. Puissance développée par une action mécanique extérieure………………………………73
2. Travail……………………………………………………………………………………...74
3. Energie potentielle…………………………………………………………………………74
4. Théorème de l’énergie cinétique…………………………………………………………..74
PROBLEMES DE CINEMATIQUE-DYNAMIQUE………………………………………..75
Bibliographie………………………………………………………………………………...78
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 6
Première partie LA STATIQUE
Chapitre I : RAPPEL MATHEMATIQUES
Chapitre II : LES TORSEURS
Chapitre III : STATIQUE DES SOLIDES
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 7
Chapitre I : Rappels Mathématique
Objectifs :
- Définir les notions de scalaire et de vecteur. - Décrire les principales opérations réalisées sur les vecteurs, les coordonnées
cartésiennes d’un vecteur et la notion de vecteur-position. - Définir le produit scalaire et le produit vectoriel de deux vecteurs.
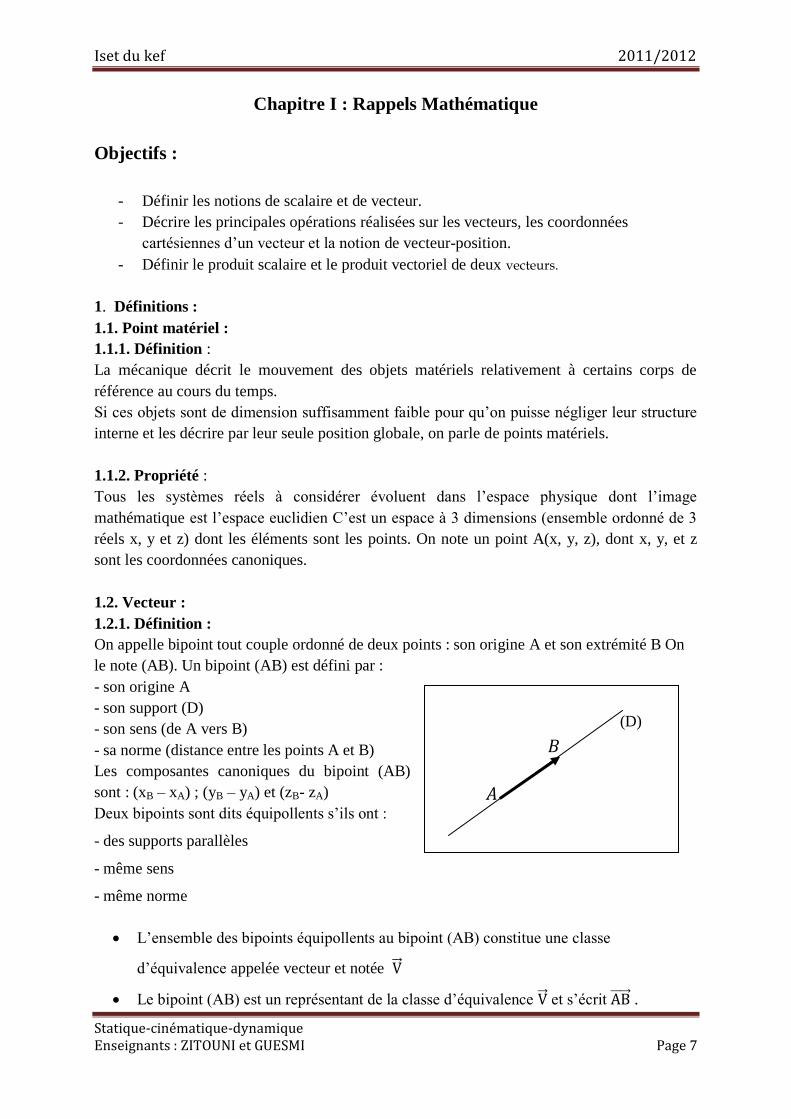
1. Définitions : 1.1. Point matériel : 1.1.1. Définition : La mécanique décrit le mouvement des objets matériels relativement à certains corps de référence au cours du temps. Si ces objets sont de dimension suffisamment faible pour qu’on puisse négliger leur structure interne et les décrire par leur seule position globale, on parle de points matériels. 1.1.2. Propriété : Tous les systèmes réels à considérer évoluent dans l’espace physique dont l’image mathématique est l’espace euclidien ω’est un espace à 3 dimensions (ensemble ordonné de 3 réels x, y et z) dont les éléments sont les points. On note un point A(x, y, z), dont x, y, et z sont les coordonnées canoniques. 1.2. Vecteur : 1.2.1. Définition : On appelle bipoint tout couple ordonné de deux points : son origine A et son extrémité B On le note (AB). Un bipoint (AB) est défini par : - son origine A - son support (D) - son sens (de A vers B) - sa norme (distance entre les points A et B) Les composantes canoniques du bipoint (AB) sont : (xB – xA) ; (yB – yA) et (zB- zA) Deux bipoints sont dits équipollents s’ils ont :
- des supports parallèles
- même sens
- même norme
L’ensemble des bipoints équipollents au bipoint (Aψ) constitue une classe
d’équivalence appelée vecteur et notée V Le bipoint (Aψ) est un représentant de la classe d’équivalence V et s’écrit AB .
A
B
(D)

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 8
Le vecteur 畦稽 est l’ensemble ordonné des 3 composantes canoniques du bipoint
associé, on le note : AB = xB − xA
yB − yA
zB − zA
On appelle vecteur unitaire un vecteur dont la norme vaut 1 : U =V V
1.2.2. Propriétés : L’ensemble (E) des vecteurs associés à l’espace euclidienne possède une structure d’espace vectoriel sur R, car il vérifie les deux propriétés suivantes :
Addition vectorielle, qui à tout couple de vecteurs (U , V ), associe le vecteur somme
U + V Multiplication par un réel, qui à tout vecteur 撃 et réel associe le vecteur colinéaire
.撃 1.3. Base :
1.3.1. Définition :
On appelle base de l’espace vectoriel (E), de dimension 3, tout triplet de vecteurs
indépendants (x , y , z ) permettant d’exprimer linéairement, de façon unique, tout vecteur V de
(E) : V = x. x + y. y + z. z les réels x, y et z sont les composantes de V dans la base B(x , y , z ) 1.4. Repère : 1.4.1. Définition : Un repère R de l’espace affine, associé à l’espace vectoriel (E), est constitué par :
- Un point, origine du repère, noté O - Une base B(x , y , z ) de l’espace vectoriel (E)
Ce repère est noté R(熊, 景 , 桂 , 渓 ) 2. Opérations sur les vecteurs : 2.1. Notation :
On définit les notations possibles des deux vecteurs V et U
U = u1. x + u2. y + u3. z ; V = v1. x + v2. y + v3. z ou U u1
u2
u3
� V v1
v2
v3
� U = u1
2 + u22 + u3
2 ; V = v12 + v2
2 + v32
2.2. Détermination des composantes d’un vecteur :
L es composantes d’un vecteur sur la base ψ peuvent être déterminées par la différence des
coordonnées dans R de l’extrémité ψ et de l’origine A d’un bipoint (A, B) :
AB xB − xA
yB − yA
zB − zA
�

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 9
2.3. Produit scalaire :
Le produit scalaire est une forme bilinéaire
symétrique définie par :
U . V = U . V . cos(ゎ) avec � est l’angle
orienté formé entre les deux vecteurs ゎ = (U , V )
Le produit scalaire est un réel positif.
On définit : U u1
u2
u3
� et V v1
v2
v3
� U . V = u1. v1 + u2. v2 + u3. v3
On définit quelques propriétés du produit scalaire :
Les vecteurs de la base sont orthogonaux on a : x . x = 1 ; x . y = 0
Le produit scalaire 戟 . 撃 est nul dans l’un des cas suivants :
- U est un vecteur nul (norme 0) ; V est un vecteur nul (norme 0) ;
- U . V sont orthogonaux
2.4. Produit vectoriel :
Le produit vectoriel est une application bilinéaire antisymétrique f définie par : U ʌV = W Le vecteur W est perpendiculaire au plan formé par les vecteurs U et V Son sens est donné par
le trièdre (U , V , W ) U ʌV = W = U . V sin(α) avec � est l’angle orienté formé entre les deux vecteurs
α = (U , V )
On définit quelques propriétés du produit scalaire :
Associativité : a. U ʌV = V ʌ a. U = a. (U ʌV )
Distributivité : U ʌ V + W = U ʌ V + U ʌ W Antisymétrique : U ʌ V = −V ʌ U
A 戟
撃 �

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 10
On définit : U u1
u2
u3
� et V v1
v2
v3
� on a U ʌ V = W = u2v3 − u3v2
v3u1 − u1v3
u1v2 − v1u2
� U ʌ V = W = u2v3 − u3v2 x + u2v3 − u3v2 y +( u1v2 − v1u2)権 2.5. Double produit vectoriel :
Le double produit vectoriel de trois vecteurs U , V et W est un vecteur X = U ʌ (V ʌ W ) En se servant de la définition du produit vectoriel, on peut montrer que ce vecteur X peut
s’exprimer par : X = U . W V − U . V W
2.6. Produit mixte :
On appelle produit mixte de trois vecteur U , V et W le scalaire U . ( V ʌ W )
Le produit mixte est invariant par permutation circulaire des vecteurs :
U . ( V ʌ W ) = V . ( W ʌ U ) = W . ( U ʌ V )
Le produit mixte ne dépend que de l’ordre des trois vecteurs.
2.7. Dérivation vectorielle :
On considère un vecteur V = x(t). x + y(t). y + z(t). z dont les composantes dans un repère
orthonormé R(O, x , y , z ) dépendent du temps et les vecteur de la base sont constants
(invariants du temps)
On définit la dérivée du vecteur V par rapport au temps de la façon suivante :
( 穴撃 穴建 )迎 =
穴捲(建)穴建 . 捲 +穴検(建)穴建 検 . +
穴権(建)穴建 権 = 捲 捲 + 検 検 + 権 権

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 11
Chapitre II : LES TORSEURS
Objectifs :
- Définir la notion des torseurs.
- Donner les principales propriétés des opérations sur les torseurs.
1. définition :
On appelle torseur 訴l’ensemble de deux champs de vecteurs :
Un champ uniforme 迎 s’appelle la résultante générale du torseur des forces appliquées
Un Champs de moment 警 s’appelle le moment résultant du torseur des moments de forces appliquées.
ω’est un champ tel que quels que soient les points A et B, il obéit au formule de transport des
moments : M A = M B + AB ʌ R
L’ensemble de ces deux éléments s’appellent éléments de réduction du torseur qui représente
l’action d’une pièce (1) sur une autre pièce (2) au point A. On note ce torseur par : τ1/2 A
Si on veut préciser ses éléments de réduction en un point A on aura : τ1/2 A= R
M A
A
= τ2/1 A= − R
M A
A
D’après le principe des actions mutuelles on peut affirmer que les deux torseurs sont égaux et
opposés.
Dans une base orthonormée B(x , y , z ) on écrit :
R = X. x + Y. y + Z. z et M A = L. x + M. y + N. z Par la suite la forme du torseur au point A est la suivante :
τ1/2 A= R
M A
A
= X
Y
Z
L
M
N
A

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 12
2. Propriétés :
2.1. Torseur nul :
Un torseur est dit nul si et seulement si ses éléments de réduction sont nul tout les deux : τ1/2 A= 0
0
A= R = 0
M A = 0 A
2.2. Egalité de deux torseurs :
Soit les torseurs τ1 A R 1
M 1A
A
et τ2 A R 2
M 2A
A
. les deux torseurs sont dites égaux ssi :
- 栗 層 = 栗 匝
- � 層� = � 匝�
3. opérations sur les torseurs :
3.1. Somme de deux torseurs :
La somme de deux torseurs τ1 A = R 1
M 1A
A
et τ2 A = R 2
M 2A
A
en un point A est un torseur τ A au même point définit sous la forme suivante :
τ A = R = R 1 + R 2
M A = M 1A + M 2A
A
3.2. Multiplication de deux torseurs :
Soit les deux torseurs τ1 A R 1
M 1A
A
et τ2 A R 2
M 2A
A
le produit de ces deux derniers est un
scalaire définit comme ci-dessous : τ1 A . τ2 A = R 1. M 2A + R 2 . M 1A
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 13
3.3. Multiplication d’un torseur par un réel :
Soit が un réel, la multiplication du torseur τ A par が
が. τ A = が. R が. M A
A
3.4. Torseur glisseur :
Un torseur τ de résultante générale non nulle est un glisseur, s’il existe au moins un point A
où le moment du torseur s’annule : τ A R 0 A
3.5. Torseur couple :
Un torseur τ de résultante générale est nulle est un couple, s’il existe au moins un point A
où le moment du torseur est non nul : τ A = 0 M A
A
3.6. Invariants d’un torseur :
Pour un torseur donné τ A = R M A
A
il y a deux invariants :
Premier invariant : La résultante générale 迎 d’un torseur Deuxième invariant : Le scalaire 系 畦 = R . M A est un invariant scalaire .Pour un
point B l’invariant scalaire est 系 稽 = R . M B avec : M B = M A + BA ʌ R D’où 系 稽 = R . M A + BA ʌ R = R . M A + R . BA ʌ R , or le produit
mixte BA ʌ R = 0 par suite 系 畦 = R . M A = C(B)
Remarque : L’invariant scalaire est indépendant du choix du point.
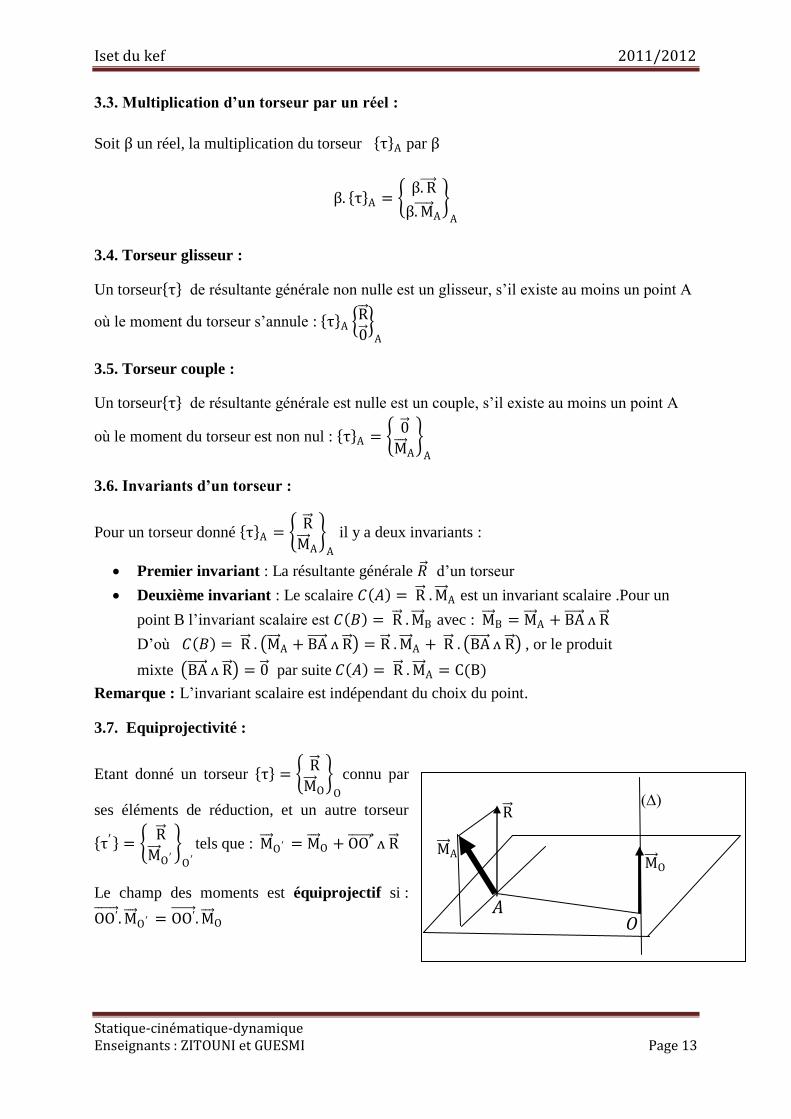
3.7. Equiprojectivité :
Etant donné un torseur τ = R M O
O
connu par
ses éléments de réduction, et un autre torseur τ′ = R M O ′
O ′ tels que : M O ′ = M O + OO′ ʌ R Le champ des moments est équiprojectif si :
OO′ . M O ′ = OO′ . M O
(∆) R
A
M A M O
O

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 14
3.8. Définition de l’axe central et du pas d’un torseur :
On appelle axe central () d’un torseur τ l’ensemble des points ψ où les éléments de
réduction R et M O sont colinéaires tel que : M o= R ( ave = pas du torseur)
Pour un torseur donné τ l’axe central est une droite qui passe par le point O défini par :
AO =R ʌ M 0
(R )2
Ainsi le pas d’un torseur s’écrit : ʎ = R ʌ M A
(R )2
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 15
Travaux Dirigés de Mécanique Générale (Torseurs)
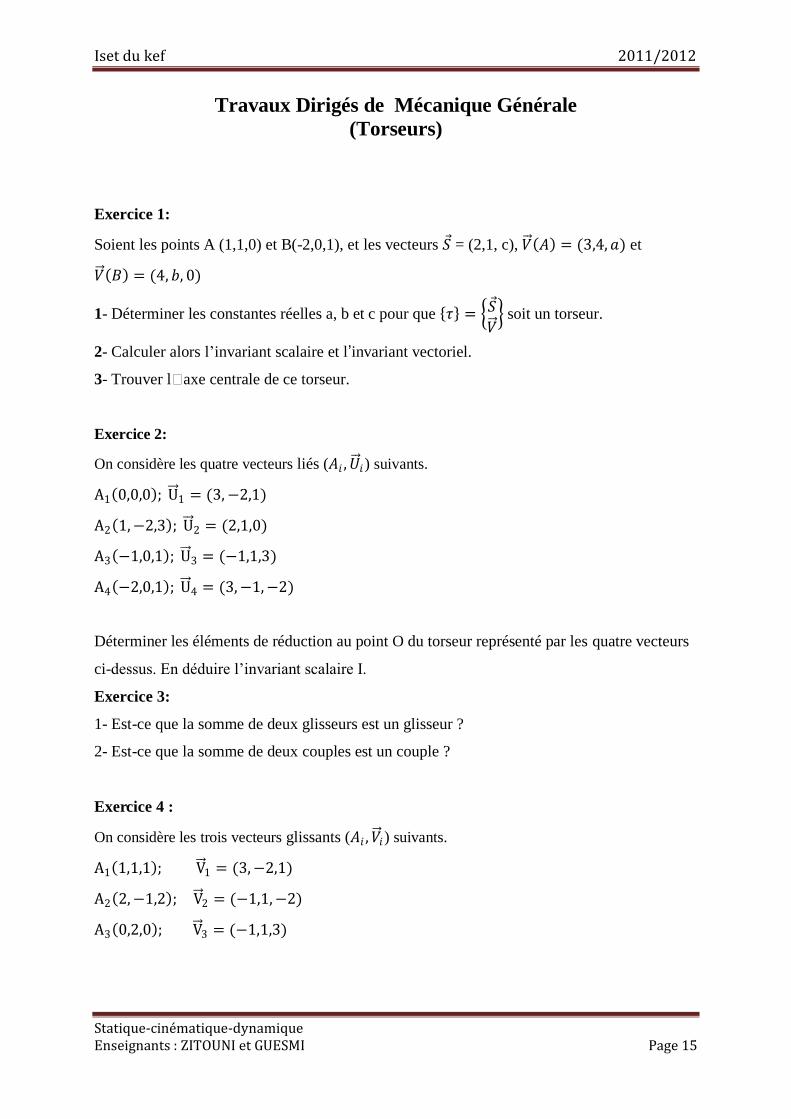
Exercice 1:
Soient les points A (1,1,0) et B(-2,0,1), et les vecteurs 鯨 = (2,1, c), 撃 畦 = (3,4, 欠) et 撃 稽 = (4, 決, 0)
1- Déterminer les constantes réelles a, b et c pour que � = 鯨 撃 soit un torseur.
2- Calculer alors l’invariant scalaire et l’invariant vectoriel.
3- Trouver laxe centrale de ce torseur.
Exercice 2:
On considère les quatre vecteurs liés (畦件 , 戟 件) suivants.
A1 0,0,0 ; U 1 = (3, −2,1)
A2 1, −2,3 ; U 2 = (2,1,0)
A3 −1,0,1 ; U 3 = (−1,1,3)
A4 −2,0,1 ; U 4 = (3, −1, −2)
Déterminer les éléments de réduction au point O du torseur représenté par les quatre vecteurs
ci-dessus. En déduire l’invariant scalaire I.
Exercice 3:
1- Est-ce que la somme de deux glisseurs est un glisseur ?
2- Est-ce que la somme de deux couples est un couple ?
Exercice 4 :
On considère les trois vecteurs glissants (畦件 , 撃 件) suivants.
A1 1,1,1 ; V 1 = (3, −2,1)
A2 2, −1,2 ; V 2 = (−1,1, −2)
A3 0,2,0 ; V 3 = (−1,1,3)

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 16
1- Trouver un vecteur glissant (畦4, 撃 4) tel que le système complet (V 1, V 2, V 3, V 4) soit
équivalent à un couple.
2- Trouver un vecteur glissant (畦4, 撃 4) tel que le système complet (V 1, V 2, V 3, V 5)tel que le
système complet ait un moment nul le long de laxe centrale.

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 17
Chapitre III : ETUDES STATIQUES DES SOLIDES
1. Introduction : La statique est la partie de la mécanique qui étudie l’équilibre des systèmes matériels soumis à un ensemble de forces. Ces systèmes peuvent se réduire à un point matériel, un ensemble de points matériels, un solide ou à un ensemble de solides. Dans ce chapitre nous analyserons les actions mécaniques exercées sur ces systèmes à travers l’étude de l’équilibre de celui-ci. Un système matériel est en équilibre statique par rapport à un repère donné, si au cours du temps, chaque point de l’ensemble garde une position fixe par rapport au repère. 2. Les systèmes de forces dans l’espace : Les systèmes de forces sont classés en trois catégories :
Concourants : les lignes d’action de toutes les forces du système passent par un même point. ω’est ce que l’on appelle forces concourantes en un point. Parallèles : les lignes d’actions des forces sont toutes parallèles, on dit aussi elles s’interceptent à l’infini Non concourantes et non parallèles : les forces ne sont pas toutes concourantes et pas toutes parallèles.
2.1. Composantes d’une force Soit 繋 une force appliquée à l’origine O d’un repère orthonormé R(O, i , j , k ) . Les composantes de cette force sont définies par :
繋 = 繋 茎 + 繋 傑 = 繋 潔剣嫌 � + 繋 嫌件券 � = 繋 嫌件券 � 潔剣嫌 � + 繋 嫌件券 � 嫌件券 � + 繋 潔剣嫌 � 繋 = 繋 嫌件券 � 潔剣嫌 � 件 + 繋 嫌件券 � 嫌件券 � 倹 + 繋 潔剣嫌 � 倦 繋 = 繋捲 件 + 繋検 倹 + 繋権 倦 nous avons aussi 繋2 = 繋捲2 + 繋検2 + 繋権2

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 18
2.2. Force définie par son module et deux points sur sa ligne d’action : Soient deux points 畦(捲畦 , 検畦 , 権畦) et 稽(捲稽 , 検稽 , 権稽) appartenant à la droite (Δ) support de la force 繋 le vecteur 畦稽 s’écrira 畦稽 = 捲稽 − 捲畦 件 + 検稽 − 検畦 倹 + 権稽 − 権畦 計 畦稽 = 穴捲 件 + 穴検 倹 + 穴権 倦 畦稽 = 穴捲2 + 穴検2 + 穴検2 = 穴
Soit 憲 le vecteur unitaire le long de la ligne d’action de la force. Il est donné par :
憲 =畦稽 畦稽 =
穴捲 件 +穴検 倹 +穴権 倦 穴捲2 +穴検 2 +穴検2 =
1穴 (穴捲 件 + 穴検 倹 + 穴権 倦 )Comme la force est donnée par :
繋 = 繋. 憲 =繋穴 (穴捲 件 + 穴検 倹 + 穴権 倦 ) ⇒ 繋捲 = 繋.
穴捲穴 ; 繋検 = 繋.穴検穴 ; 繋権 = 繋.
穴権穴
3. Equilibre d’un point matériel : Un point matériel est en équilibre statique lorsque la somme de toutes les forces extérieures auxquelles il est soumis, est nulle.
ωes forces peuvent être coplanaire ou dans l’espace. 繋 1 + 繋 2 + 繋 3 ………… …繋 券 = 0 ⇒ 迎 = 繋 件 = 0 券件=1
Une particule soumise à deux forces est en équilibre statique si les deux forces ont le même module, la même direction mais de sens opposé tel que leur résultante, soit nulle. 繋 1 + 繋 2 = 0 ; 繋1 − 繋2 = 0 ⇒ 繋1 = 繋2
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 19
4. Liaisons des solides : Nous savons que la position d'un solide dans l'espace peut être définie par 6 paramètres, 3 Rotations et 3 Translations. Ces 6 paramètres sont les 6 degrés de libertés du solide. En fait un solide n'est généralement pas seul, il est en liaison avec d'autres solides. Cette liaison va limiter le nombre de degrés de liberté existant entre les solides. L'étude des liaisons réelles existantes entre les différentes pièces d'un mécanisme est délicate et difficile. En effet, les défauts entre les surfaces de contact (rugosité, défaut de forme), la présence de jeu, la déformation des pièces, les frottements, et l'usure écarte le modèle théorique de la liaison de la réalité. Afin de pouvoir étudier le fonctionnement d'un mécanisme, il est nécessaire de
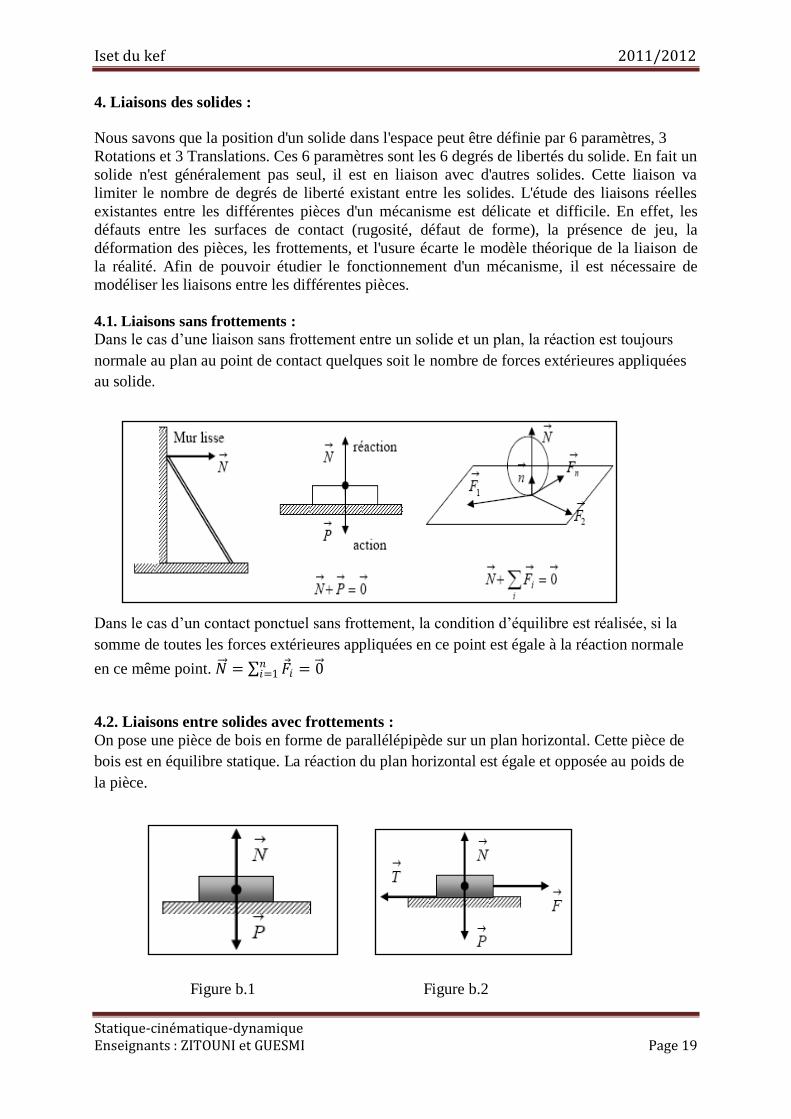
modéliser les liaisons entre les différentes pièces. 4.1. Liaisons sans frottements : Dans le cas d’une liaison sans frottement entre un solide et un plan, la réaction est toujours normale au plan au point de contact quelques soit le nombre de forces extérieures appliquées au solide.
Dans le cas d’un contact ponctuel sans frottement, la condition d’équilibre est réalisée, si la somme de toutes les forces extérieures appliquées en ce point est égale à la réaction normale
en ce même point. 軽 = 繋 件 = 0 券件=1
4.2. Liaisons entre solides avec frottements : On pose une pièce de bois en forme de parallélépipède sur un plan horizontal. Cette pièce de bois est en équilibre statique. La réaction du plan horizontal est égale et opposée au poids de la pièce.
Figure b.1 Figure b.2

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 20
Appliquons graduellement en un point de cette pièce une force horizontale 繋 (figure : b.1) La pièce ne bougera pas tant que cette force est inférieure à une certaine valeur limite, il existe alors une contre force 劇 qui équilibre et s’oppose à cette force 繋 . 劇 est appelée force de frottement statique. Elle résulte d’un grand nombre de paramètres liés aux états de surfaces, à la nature des matériaux et aux forces de contact entre la pièce et la surface considérée. Cette force de frottement statique obéit à la variation représentée sur la figure suivante. Si μ
0 est le coefficient de frottement statique (dépend uniquement de la nature des surfaces de
contact)
Nous pouvons écrire :
Pour que l’équilibre statique soit réalisable il faut que : 劇 < �0 . 軽 A l’équilibre limite on aura : 劇 = �0 . 軽
Dans le cas d’une surface avec frottements (figure ci-dessous), la condition d’équilibre s’écrira : 軽 + 劇 + 繋 件 = 0 券件=1
(la somme des actions et des réactions, est nulle)
�0 = 劇 軽 = tan �
La force de frottement 劇 est dirigée dans le sens contraire du mouvement et l’angle � est appelé angle de frottement statique.
Si 繋 > 劇 le solide se met en mouvement de glissement sur la surface.
Liaisons normalisées entre solides : Une liaison est dite parfaite si: Le contact s'établit théoriquement en un point, sur une ligne ou sur une surface de
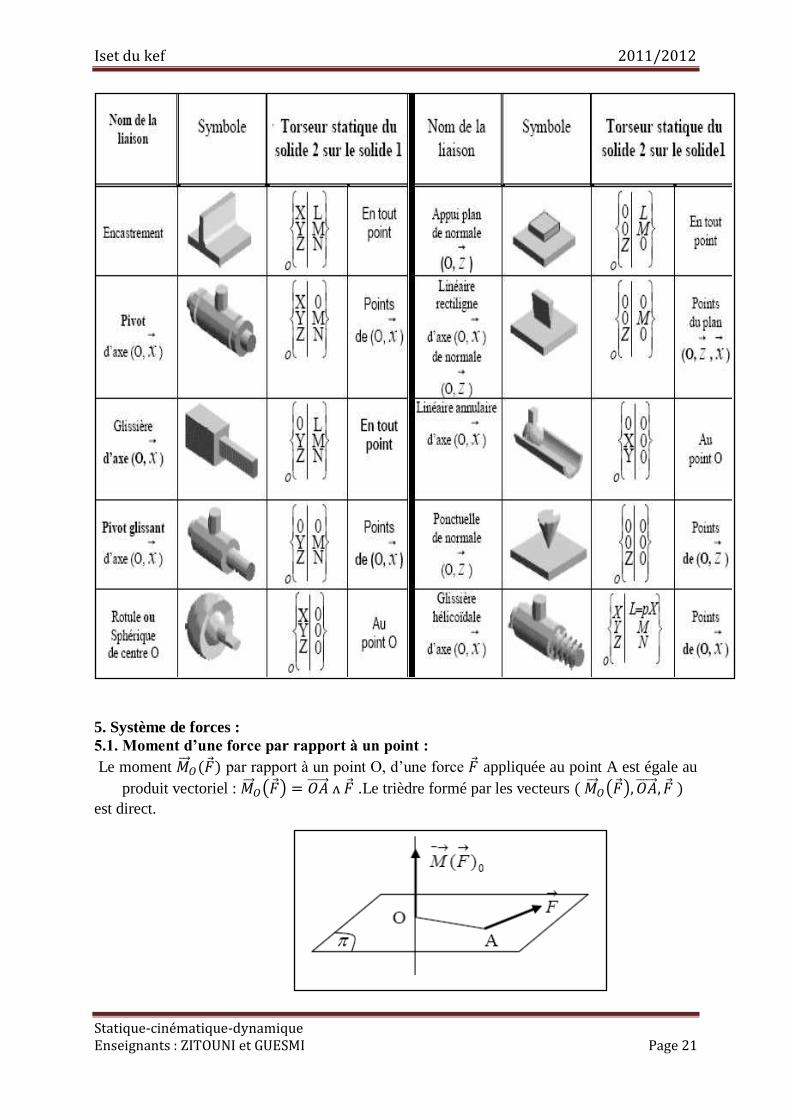
définition géométrique simple (plan sphère, cylindre, surface hélicoïdale, ..); Les surfaces de contact sont supposées géométriquement parfaites; la liaison est sans jeu. La norme NF E04-015 présente les dix liaisons élémentaires présentées sur le tableau ci-dessous.
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 21
5. Système de forces : 5.1. Moment d’une force par rapport à un point : Le moment 警 頚(繋 ) par rapport à un point O, d’une force 繋 appliquée au point A est égale au
produit vectoriel : 警 頚 繋 = 頚畦 ʌ 繋 .Le trièdre formé par les vecteurs ( 警 頚 繋 , 頚畦 , 繋 ) est direct.

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 22
5.2. Moment d’une force par rapport à un axe : Soit O un point sur l’axe (∆) et u vecteur unitaire porté par cet axe. On détermine le moment par rapport au point O, noté : M /∆ F sa projection sur l’axe est donnée par : M /∆ F = M /O F . u . u 5.3 Théorème de VARIGNON : Le moment d’un système de forces concourantes en un point A par rapport à un point O est égal au moment de la résultante des forces par rapport au point O. Dans les deux cas de figure nous montrerons que le moment résultant est égal au moment de la résultante des forces du système.
Figure a : Nous avons 迎 = 繋 件(畦)券件=1 et le moment au point O est donné par : 警 頚 迎 = 警 件(繋 件券件=1 ) = 頚畦 ʌ ( 繋 1 + 繋 2 + 繋 3 … + 繋 券 ) = 頚畦 ʌ 迎 Figure b : Nous avons 迎 = 繋 件(警件)券件=1
OM 1 = OA + AM
1 ; OM 2 = OA + AM
2 ;… ; OM n = OA + AM
n 警 件(繋 件券件=1 ) = 頚警 1 ʌ 繋 1 + 頚警
2 ʌ 繋 2 + …+ 頚警 券 ʌ 繋 券 . 警 件(繋 件券件=1 ) = (頚畦 + 畦警 1) ʌ 繋 1 + 頚畦 + 畦警
2 ʌ 繋 2 + …+( 頚畦 + 畦警 券) ʌ 繋 券 .
Or on a 畦警 件 // 繋 件 donc 畦警 件 ʌ 繋 件 = 0 On aura finalement : M i(F i
ni=1 ) = OA ʌ ( F 1 + F 2 + F 3 … + F n ) = OA ʌ R = M O R

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 23
6. Statique du solide : Tous les solides que nous étudierons dans ce chapitre sont considérés indéformables : la distance entre deux points du même solide reste constante quels que soit les systèmes de forces extérieures appliqués. On considère un solide (S) quelconque soumis à des forces ( F 1, F 2, F 3, … , F n ) : appliquées aux points : ( M1, M2, M3, … , Mn )
6.1. Equilibre du solide : principe fondamental de la statique (PFS) : Pour que le solide soit en équilibre statique il faut et il suffit que : La résultante de toutes les forces extérieures appliquées au solide, soit nulle ; Le moment résultant de toutes ces forces en un point O, soit nul.
迎 = 繋 件(畦)券件=1 = 0 警 頚 = 警 件(繋 件券件=1 ) = 0
Un solide (S), soumis à des actions mécaniques extérieures est en équilibre statique si et seulement si le torseur représentant l’ensemble de ces actions est un torseur nul. Ces deux équations vectorielles se traduisent par les six équations scalaires suivantes :
Théorème de la résultante statique (TRS) : 迎 = 0 ⇒ 迎捲 = 0迎検 = 0迎権 = 0
� Théorème du moment statique (TM S) : 警 頚 迎 = 0 ⇒ 警捲 = 0警検 = 0警権 = 0
�

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 24
6.2. Ecriture scalaire du principe fondamental de la Statique :
Mathématiquement, nous pouvons traduire ce PFS par la relation suivante :
�嫌 →嫌 = 0
0 ⇒ 迎 (鯨件 →鯨)警 頚(鯨件 → 鯨)
頚 = 隙件 桁件 傑件 詣件 警件 軽件 頚 = 0
0
0
000
On aura finalement un système de six équations :
隙件 = 0 桁件 = 0 傑件 = 0 詣件 = 0 警件 = 0 軽件 = 0
�
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 25
Travaux Dirigés Mécanique Générale (Statique)
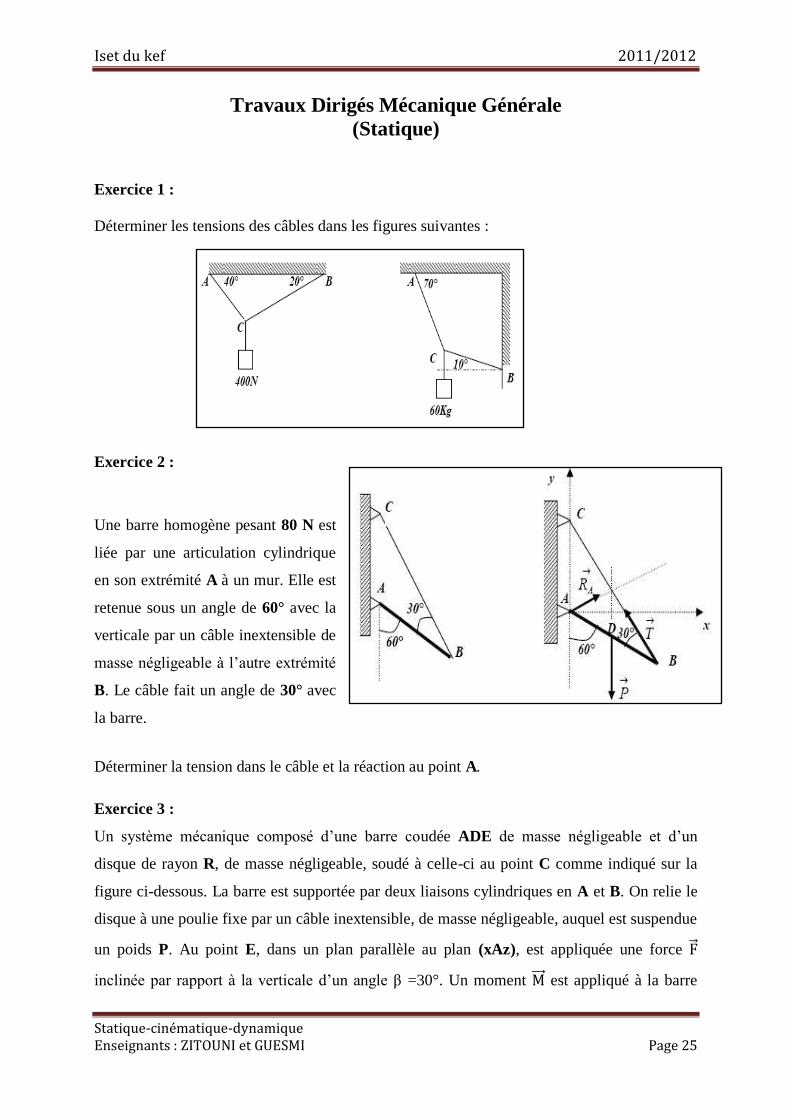
Exercice 1 : Déterminer les tensions des câbles dans les figures suivantes :
Exercice 2 : Une barre homogène pesant 80 N est
liée par une articulation cylindrique
en son extrémité A à un mur. Elle est
retenue sous un angle de 60° avec la
verticale par un câble inextensible de
masse négligeable à l’autre extrémité
B. Le câble fait un angle de 30° avec
la barre.
Déterminer la tension dans le câble et la réaction au point A. Exercice 3 :
Un système mécanique composé d’une barre coudée ADE de masse négligeable et d’un
disque de rayon R, de masse négligeable, soudé à celle-ci au point C comme indiqué sur la
figure ci-dessous. La barre est supportée par deux liaisons cylindriques en A et B. On relie le
disque à une poulie fixe par un câble inextensible, de masse négligeable, auquel est suspendue
un poids P. Au point E, dans un plan parallèle au plan (xAz), est appliquée une force F inclinée par rapport à la verticale d’un angle β =30°. Un moment M est appliqué à la barre
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 26
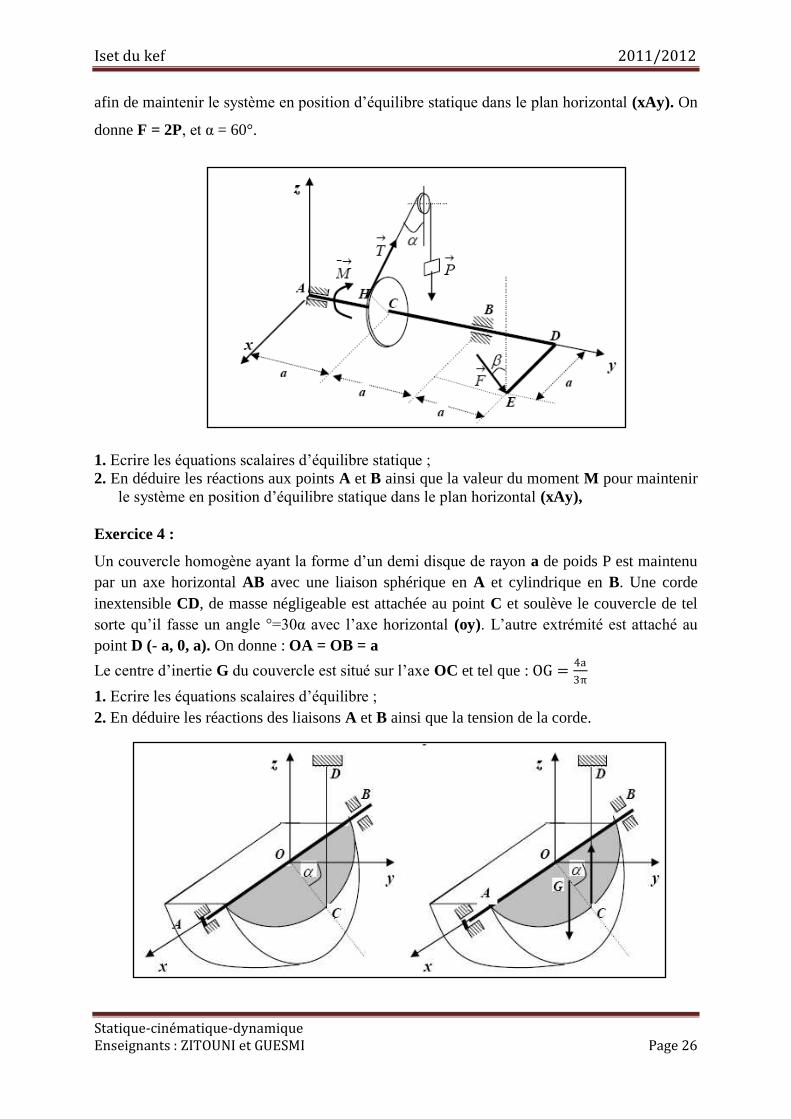
afin de maintenir le système en position d’équilibre statique dans le plan horizontal (xAy). On
donne F = 2P, et α = 60°.
1. Ecrire les équations scalaires d’équilibre statique ; 2. En déduire les réactions aux points A et B ainsi que la valeur du moment M pour maintenir
le système en position d’équilibre statique dans le plan horizontal (xAy), Exercice 4 :
Un couvercle homogène ayant la forme d’un demi disque de rayon a de poids P est maintenu par un axe horizontal AB avec une liaison sphérique en A et cylindrique en B. Une corde inextensible CD, de masse négligeable est attachée au point C et soulève le couvercle de tel sorte qu’il fasse un angle °=30α avec l’axe horizontal (oy). L’autre extrémité est attaché au point D (- a, 0, a). On donne : OA = OB = a
Le centre d’inertie G du couvercle est situé sur l’axe OC et tel que : OG =4a
3ぱ 1. Ecrire les équations scalaires d’équilibre ; 2. En déduire les réactions des liaisons A et B ainsi que la tension de la corde.
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 27
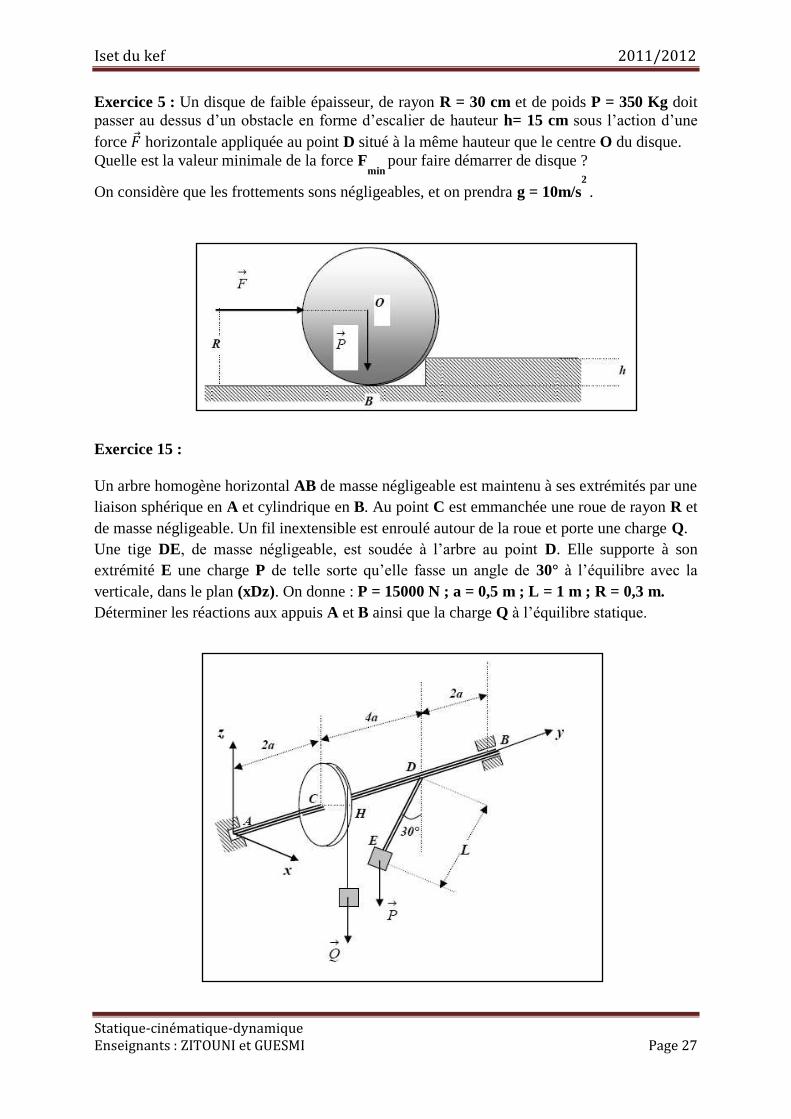
Exercice 5 : Un disque de faible épaisseur, de rayon R = 30 cm et de poids P = 350 Kg doit passer au dessus d’un obstacle en forme d’escalier de hauteur h= 15 cm sous l’action d’une force 繋 horizontale appliquée au point D situé à la même hauteur que le centre O du disque. Quelle est la valeur minimale de la force F
min pour faire démarrer de disque ?
On considère que les frottements sons négligeables, et on prendra g = 10m/s2 .
Exercice 15 : Un arbre homogène horizontal AB de masse négligeable est maintenu à ses extrémités par une liaison sphérique en A et cylindrique en B. Au point C est emmanchée une roue de rayon R et de masse négligeable. Un fil inextensible est enroulé autour de la roue et porte une charge Q. Une tige DE, de masse négligeable, est soudée à l’arbre au point D. Elle supporte à son extrémité E une charge P de telle sorte qu’elle fasse un angle de 30° à l’équilibre avec la verticale, dans le plan (xDz). On donne : P = 15000 N ; a = 0,5 m ; L = 1 m ; R = 0,3 m. Déterminer les réactions aux appuis A et B ainsi que la charge Q à l’équilibre statique.
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 28
Deuxième partie : LA CINEMATIQUE
Chapitre I : PARAMETRAGE
Chapitre II : RAPPELSDEGEOMETRIEVECTORIELLE
Chapitre III : CINEMATIQUE DU POINT MATERIEL
Chapitre IV : CINEMATIQUE DE SOLIDES INDEFORMABLE

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 29
Chapitre I : PARAMETRAGE
1. Paramétrage d'un point par rapport à un repère :
Pour définir la position d'un solide (S) par rapport à un repère R(O, x , y , z ) , il faut lié à ce solide un repère R1(O1, x 1, y 1, z 1) et définir la position de R1 par rapport à R
R1 est caractérisé par son origine O1 et sa base( x 1, y 1, z 1) on doit donc définir la position de O1 par rapport à R et l’orientation de la base ( x 1, y 1, z 1) par rapport à la base ( x , y , z )
Conclusion : Repérer un solide rigide par rapport à un référentiel R d’étude consiste à : - Définir un repère de S : R1
- Paramétrer l’origine O1 de R1 à l’aide de coordonnées - Paramétrer l’orientation de la base de R1
2. système de coordonnées :
Les paramètres qui définissent la position d’un point dans un repère sont : les coordonnées cartésiennes les coordonnées cylindriques
les coordonnées sphériques Le type de coordonnée choisi est fonction du problème à traité (problème à symétrie de révolution autour d’un axe, problème à symétrie sphérique).
y z
O
x 1
z 1
y 1
O1
x
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 30
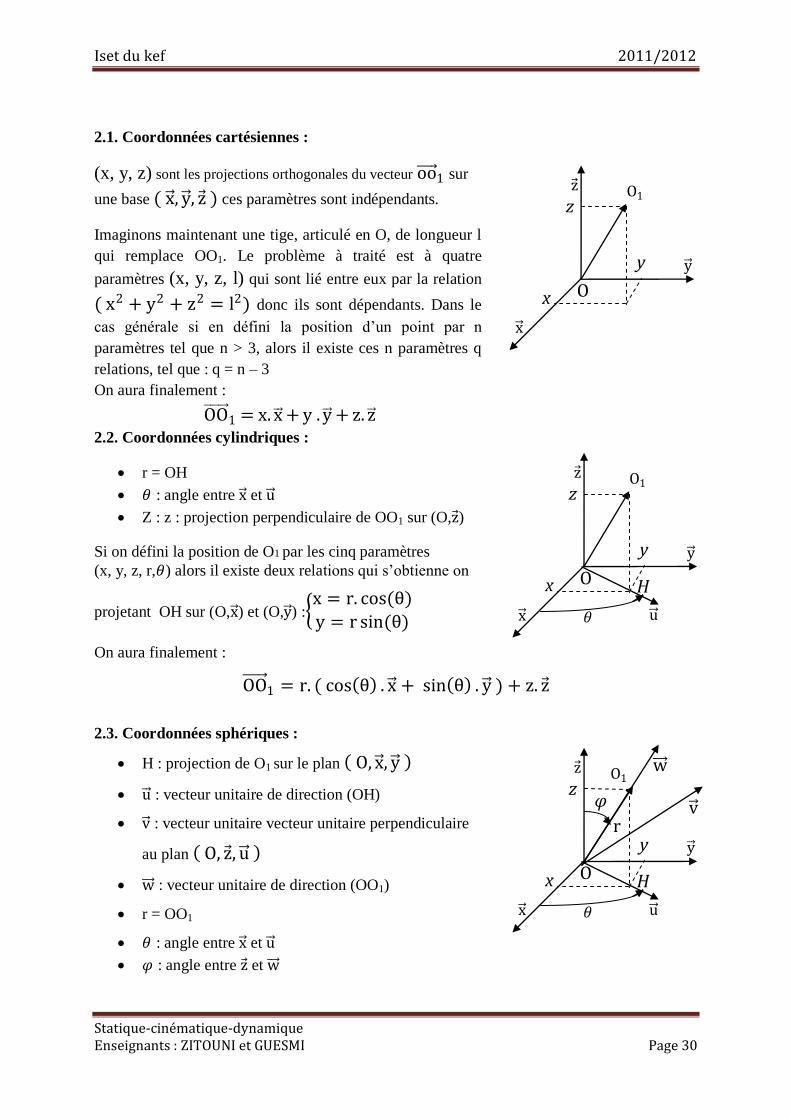
2.1. Coordonnées cartésiennes :
(x, y, z) sont les projections orthogonales du vecteur oo 1 sur
une base ( x , y , z ) ces paramètres sont indépendants.
Imaginons maintenant une tige, articulé en O, de longueur l qui remplace OO1. Le problème à traité est à quatre
paramètres (x, y, z, l) qui sont lié entre eux par la relation
( x2 + y2 + z2 = l2) donc ils sont dépendants. Dans le cas générale si en défini la position d’un point par n paramètres tel que n > 3, alors il existe ces n paramètres q relations, tel que : q = n – 3 On aura finalement :
OO 1 = x. x + y . y + z. z
2.2. Coordonnées cylindriques :
r = OH
� : angle entre x et u Z : z : projection perpendiculaire de OO1 sur (O,z )
Si on défini la position de O1 par les cinq paramètres (x, y, z, r,�) alors il existe deux relations qui s’obtienne on
projetant OH sur (O,x ) et (O,y ) : x = r. cos(θ)
y = r sin(θ)�
On aura finalement :
OO 1 = r. ( cos θ . x + sin θ . y ) + z. z
2.3. Coordonnées sphériques :
H : projection de O1 sur le plan O, x , y
u : vecteur unitaire de direction (OH)
v : vecteur unitaire vecteur unitaire perpendiculaire
au plan O, z , u
w : vecteur unitaire de direction (OO1)
r = OO1
� : angle entre x et u � : angle entre z et w
y z O
O1
x
y
z
x
y z O
O1
x
y
z
x u
H �
y z O
O1
x
y
z
x u
H �
w
v �
r
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 31
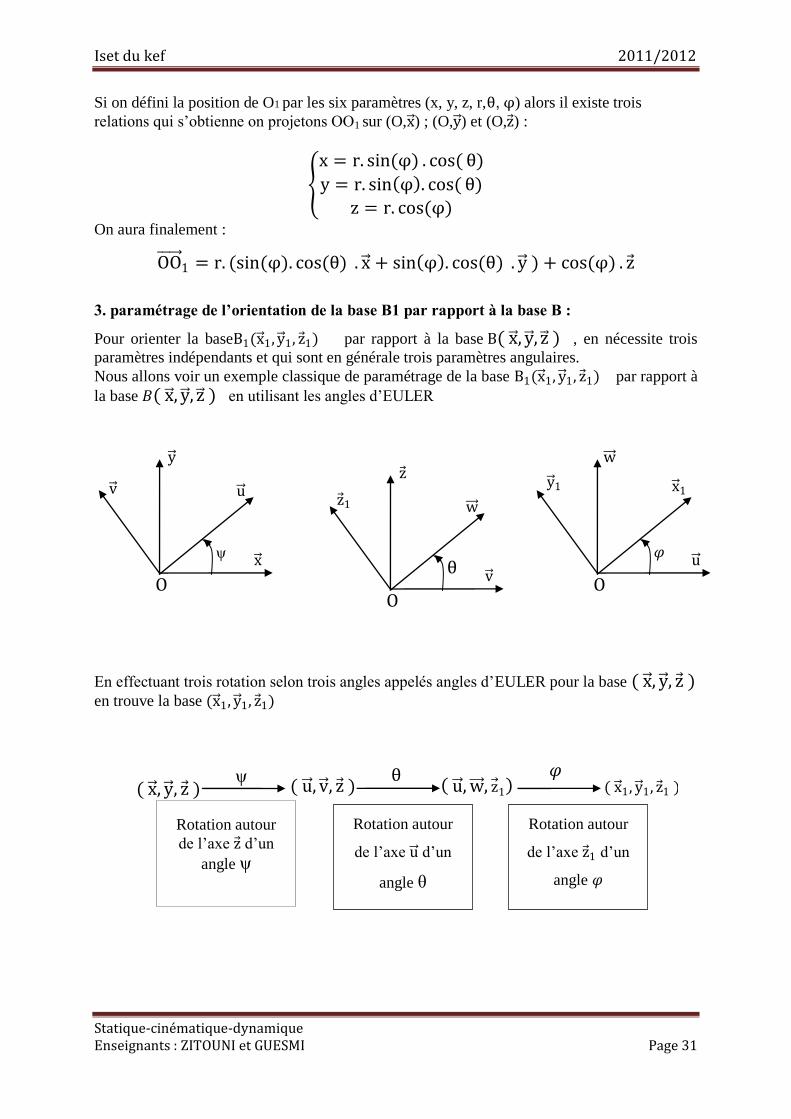
Si on défini la position de O1 par les six paramètres (x, y, z, r,θ, φ) alors il existe trois relations qui s’obtienne on projetons OO1 sur (O,x ) ; (O,y ) et (O,z ) : x = r. sin(φ) . cos( θ)
y = r. sin φ . cos( θ)
z = r. cos(φ)
� On aura finalement :
OO 1 = r. (sin(φ). cos(θ) . x + sin φ . cos(θ) . y ) + cos(φ) . z
3. paramétrage de l’orientation de la base B1 par rapport à la base B :
Pour orienter la baseB1(x 1, y 1, z 1) par rapport à la base B( x , y , z ) , en nécessite trois paramètres indépendants et qui sont en générale trois paramètres angulaires. Nous allons voir un exemple classique de paramétrage de la base B1(x 1, y 1, z 1) par rapport à la base 稽( x , y , z ) en utilisant les angles d’EULER
En effectuant trois rotation selon trois angles appelés angles d’EULER pour la base ( x , y , z ) en trouve la base (x 1, y 1, z 1)
y u
O
v
ね x
z w
O
z 1
θ v
w x 1
O
y 1
� u
ね
( x , y , z ) ( u , v , z )
θ
u , w , z 1 �
( x 1, y 1, z 1 )
Rotation autour de l’axe z d’un
angle ね
Rotation autour
de l’axe u d’un
angle θ
Rotation autour
de l’axe z 1 d’un
angle �

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 32
ね: angle de précession ; θ : angle de nutation ; � : angle de rotation propre
Les deux bases( u , v , z ) et u , w , z 1 sont appelées bases intermédiaires. Soit R2 un repère lié à la base( u , v , z ) et R3 un repère lié à la base u , w , z 1
les vecteurs vitesses de rotation sont définies par : Ω 1/3 =dφdt
. z 1 = φ . z 1 ; Ω 2/0 =dψdt
. z = ψ . z ; Ω 3/2 =dθdt
. u = θ . u

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 33
Chapitre II : RAPPELS DEGEOMETRIE VECTORIELLE 1. Fonction vectorielle : Soit l’espace vectoriel R3 muni d’une base B( x , y , z ) Soit trois fonctions réelles u1( t ) , u2 ( t ) , u3 ( t ) d’un paramètre réel t .
L’application qui à toute valeur de t associe le vecteur z ) t ( u y ) t ( u x ) t ( u ) t ( u 321
est appelée fonction vectorielle de variable t . Nous supposerons toujours par la suite que les fonctions ui (t) sont continues et suffisamment dérivables, par rapport à la variable t .
1.1. Propriétés :
Dérivée d’une somme de vecteurs :
d
dt(V 1 + V 2)
/R
= d
dt(V 1)
/R
+ d
dt(V 2)
/R
Dérivée du produit d’une fonction scalaire par un vecteur :
d
dt(ʎ . V )
/R
= V . d
dt(ʎ )
/R
+ ʎ . d
dt(V )
/R
Dérivée d’un produit scalaire / d
dt(V 1 . V 2)
/R
= d
dt(V 1)
/R
. V 2 + V 1. d
dt(V 2)
/R
Dérivée d’un produit vectoriel : d
dt(V 1 ʌ V 2)
/R
= d
dt(V 1)
/R
ʌ V 2 + V 1 ʌ d
dt(V 2)
/R
d
dtV (θ(t))
/R
=dθdt
. d
dtV
/R
= θ. d
dtV
2. Dérivation d’un vecteur exprimé dans la base B de dérivation :
Si ) t ( u
est une fonction vectorielle qui à t associe :
z ) t ( u y ) t ( u x ) t ( u ) t ( u 321
On appelle dérivée vectorielle dans la base B , la fonction vectorielle qui à t associe le vecteur :
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 34
z Bdt / ) t ( u d y Bdt /
) t ( u d x Bdt / ) t ( u d Bdt /
) t ( u 321
Dans la suite , lorsque t représente le paramètre temps , on notera :
i2
i2
ii
u B / dt
) t ( u det u Bdt /
) t ( u d
La dérivée s’écrit alors : z u y u x u Bdt / ) t ( u d 321
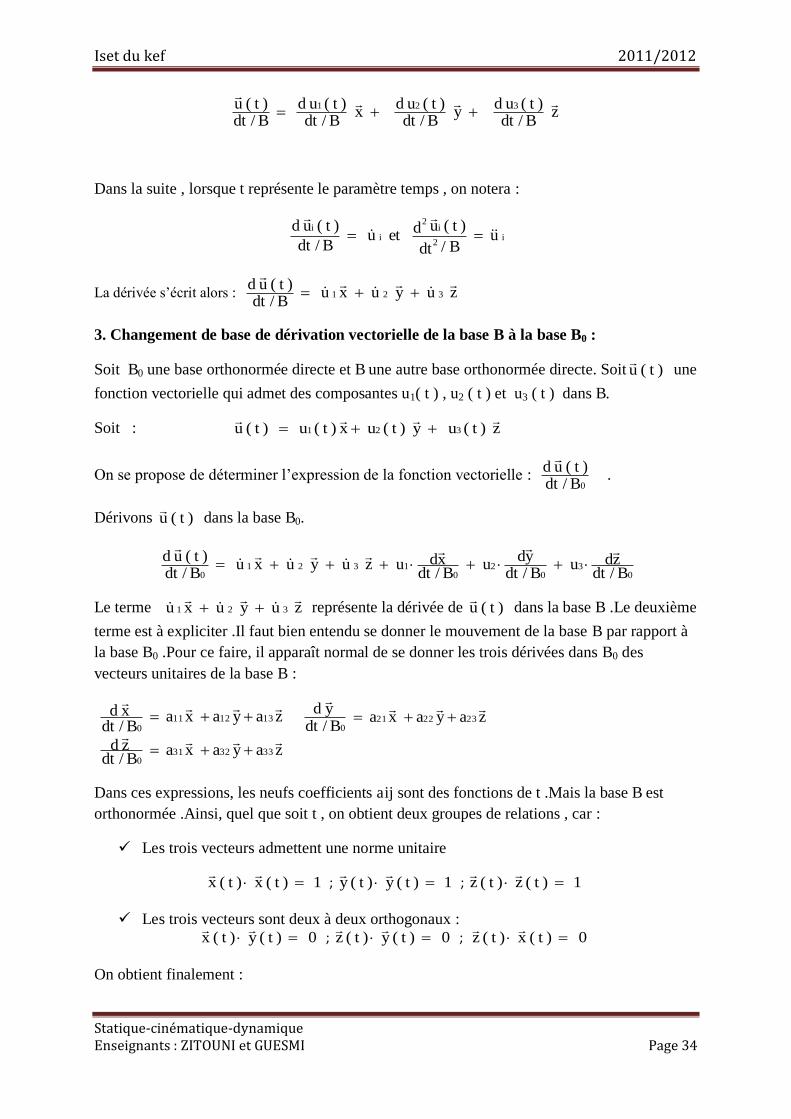
3. Changement de base de dérivation vectorielle de la base B à la base B0 :
Soit B0 une base orthonormée directe et B une autre base orthonormée directe. Soit ) t ( u
une
fonction vectorielle qui admet des composantes u1( t ) , u2 ( t ) et u3 ( t ) dans B.
Soit : z ) t ( u y ) t ( u x ) t ( u ) t ( u 321
On se propose de déterminer l’expression de la fonction vectorielle : Bdt / ) t ( u d 0
.
Dérivons ) t ( u
dans la base B0.
03
02
01321
0 Bdt / zd u Bdt /
yd u Bdt / xd u z u y u x u Bdt /
) t ( u d
Le terme z u y u x u 321
représente la dérivée de ) t ( u
dans la base B .Le deuxième
terme est à expliciter .Il faut bien entendu se donner le mouvement de la base B par rapport à la base B0 .Pour ce faire, il apparaît normal de se donner les trois dérivées dans B0 des vecteurs unitaires de la base B :
z a y a x a Bdt / x d 131211
0
z a y a x a Bdt / y d 232221
0
z a y a x a Bdt / z d 333231
0
Dans ces expressions, les neufs coefficients aij sont des fonctions de t .Mais la base B est orthonormée .Ainsi, quel que soit t , on obtient deux groupes de relations , car :
Les trois vecteurs admettent une norme unitaire
1 ) t ( x ) t ( x ; 1 ) t ( y ) t ( y
; 1 ) t ( z ) t ( z
Les trois vecteurs sont deux à deux orthogonaux : 0 ) t ( y ) t ( x
; 0 ) t ( y ) t ( z ; 0 ) t ( x ) t ( z
On obtient finalement :
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 35
z a y a Bdt / x d 1312
0
; z a x a Bdt / y d 2321
0
; y a x a Bdt /
z d 32310
La dérivée vectorielle d’un vecteur de la base B , dans la base B0 , est orthogonale à ce vecteur .Les neuf coefficients aij se réduisent à six , car aij = 0
0 Bdt / y d x y Bdt /
x d 00
; 0 ) z a x a ( x y ) z a y a ( 23211312
Soit : a 12 + a 21 = 0
On obtient la relation générale d’antisymétrie : a ij + a j i = 0
En définitive, les neuf coefficients aij se réduisent à trois. Soit a12, a13 et a23 ces coefficients .Dans ces conditions, les dérivées des vecteurs unitaires de la base B, données de départ, s’écrivent :
z a y a Bdt / x d 1312
0
; z a x a - Bdt / y d 2312
0
; y a x a - Bdt /
z d 32130
En prenant en compte les deux propriétés démontrées (dérivées orthogonales et antisymétrie),
il est possible de construire un vecteur ) B / B ( 0 tel que :
x ) B / B ( Bdt / x d 0
0
; y ) B / B ( Bdt / y d 0
0
; z ) B / B ( Bdt / z d 0
0
En définitive, pour ce type de mouvement (rotation d’angle , autour de z
), on a :
z θ ) B / B ( 0
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 36
Chapitre III : CINEMATIQUE DU POINT MATERIEL
1. Vecteur vitesse d’un point M par rapport à un repère : 1.1. Définition :
Le vecteur vitesse du point M par rapport au repère R, à la date t, est la dérivée du vecteur
position 頚警(建) par rapport à t, dans R. 1.2. Détermination du vecteur vitesse :
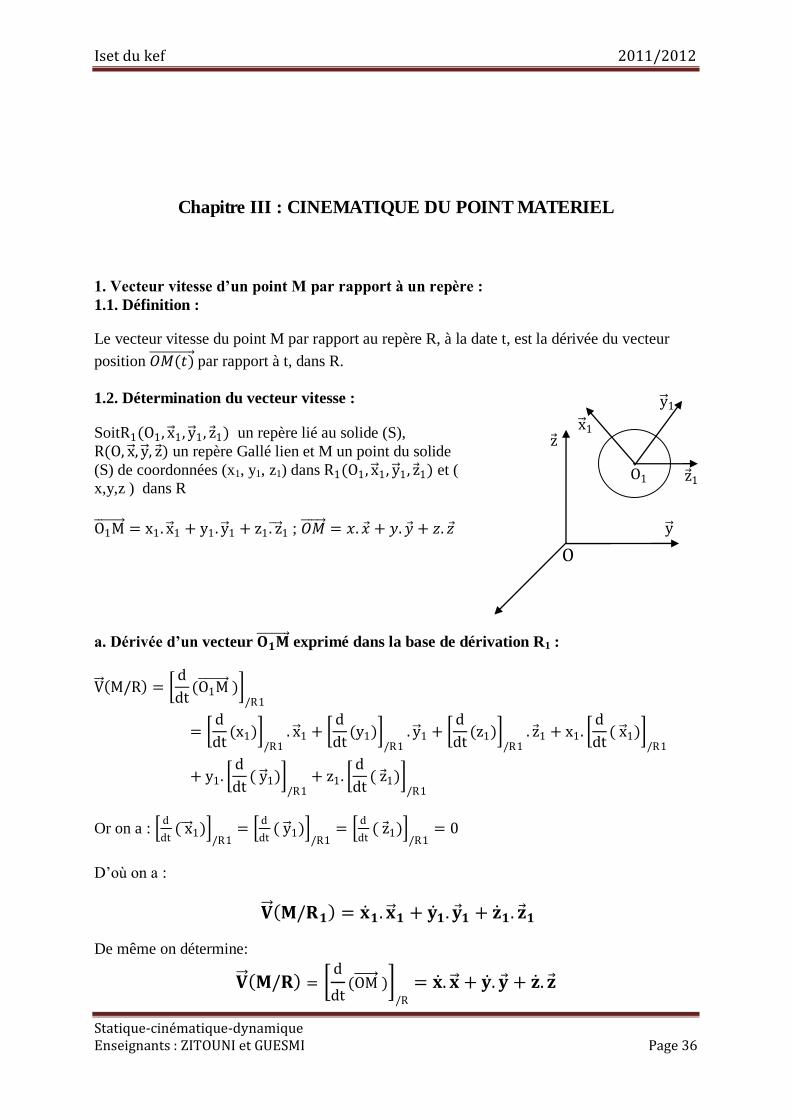
SoitR1(O1, x 1, y 1, z 1) un repère lié au solide (S), R(O, x , y , z ) un repère Gallé lien et M un point du solide (S) de coordonnées (x1, y1, z1) dans R1(O1, x 1, y 1, z 1) et ( x,y,z ) dans R O1M = x1. x 1 + y1. y 1 + z1. z 1 ; 頚警 = 捲. 捲 + 検. 検 + 権. 権 a. Dérivée d’un vecteur 熊層� exprimé dans la base de dérivation R1 :
V M/R = d
dt(O1M )
/R1
= d
dt(x1)
/R1
. x 1 + d
dt(y1)
/R1
. y 1 + d
dt(z1)
/R1
. z 1 + x1. d
dt( x 1)
/R1
+ y1. d
dt( y 1)
/R1
+ z1. d
dt( z 1)
/R1
Or on a : d
dt( x 1)
/R1= d
dt( y 1)
/R1= d
dt( z 1)
/R1= 0
D’où on a :
� �/栗層 = 景 層. 景 層 + 桂 層. 桂 層 + 渓 層. 渓 層
De même on détermine: � �/栗 = d
dt(OM )
/R
= 景 . 景 + 桂 . 桂 + 渓 . 渓
y z
O
x 1
z 1
y 1
O1

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 37
c. Dérivée d’un vecteur 熊層� qui n’est pas exprimé dans la base de dérivation R :
SoitR1(O1, x 1, y 1, z 1) un repère lié au solide (S), R(O, x , y , z ) un repère Gallé lien et M un point du solide (S) de coordonnées (x1, y1, z1) dans R1(O1, x 1, y 1, z 1) et ( x,y,z ) dans R O1M = x1. x 1 + y1. y 1 + z1. z 1 ; OM = x. x + y. y + z. z d
dt(O1M )
/R
= d
dt x1
/R
. x 1 + d
dt(y1)
/R
. y 1 + d
dt(z1)
/R
. z 1 + x1. d
dt( x 1)
/R
+ y1. d
dt( y 1)
/R
+ z1. d
dt( z 1)
/R
d
dt(O1M )
/R
= d
dt x1
/R
. x 1 + d
dt(y1)
/R
. y 1 + d
dt(z1)
/R
. z 1 + x1. Ω (R1/R) ʌ x 1
+ y1. Ω (R1/R) ʌ y 1 + z1. Ω (R1/R) ʌ z 1
= d
dt x1
/R
. x 1 + d
dt(y1)
/R
. y 1 + d
dt(z1)
/R
. z 1 + Ω (R1/R) ʌ (x1. x 1 + y1. y 1 + z1. z 1)
= d
dt x1
/R
. x 1 + d
dt(y1)
/R
. y 1 + d
dt(z1)
/R
. z 1 + Ω (R1/R) ʌ O1M On aura finalement : � (�/栗) = � (�/栗層) + � (栗層/栗) ʌ 熊層� d. Composition des vitesses:
Dans la description du mouvement d’un solide par rapport à un repère il est souvent commode de passer par l’intermédiaire d’autres repères. On considère deux repères R1 et R de l’espace associé à un solide rigide S qui est en mouvement. Soit un point M appartenant à S, le mouvement de M par rapport à R1 est appelé mouvement relatif, par contre le mouvement de M par rapport à R est appelé mouvement absolu. 頚警 = 頚頚1
+ 頚1警 ⇒ 撃 警/迎 = 穴頚警 穴建 迎 = 穴(頚頚1
+ 頚1警 )穴建 迎
撃 警/迎 = 穴頚警 穴建 迎 = 穴(頚頚1
)穴建 迎 + 穴(頚1警 )穴建 迎
Or on a :
穴(頚頚1
)穴建 迎 = 撃 頚1/迎 et on a aussi 穴(頚1警 )穴建 迎 =
穴(頚1警 )穴建 迎1+ Ω (R1/R) ʌ O1M
Donc : 穴頚警 穴建 迎= 撃 頚1/迎 + Ω (R1/R) ʌ O1M

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 38
Avec 撃 警/迎1 = 撃 堅(警) est la vitesse relatif de M par rapport à R1 . 穴頚警 穴建 迎 = 撃 警/迎 = 撃 欠(警) est la vitesse absolue de M par rapport à R.
撃 結 警 = 撃 頚1/迎 + Ω (R1/R) ʌ O1M appelé vitesse d’entraînement. 撃 欠 警 = 撃 結 警 + 撃 堅(警)
On aura finalement : � �/三 = � 鮫層/三 + � �/三層 + � (栗層/栗) ʌ 熊層� Si M est un point fixe de S à l’instant (t) alorsV M/R1 = 0 ; puisque R1 est lié à S .Par la suite la vitesse de M lié au repère R1 est :
V (M ∈ R1/R) = V O1/R + Ω (R1/R) ʌ O1M
Finalement, la relation de composition des vitesses est la suivante : � �/三 = � �/三層 + � (� ∈ 栗層/栗)
2. Vecteur accélération d’un point M par rapport à un repère : 2.1. Définition : On appelle accélération du point M, à l’instant t, par rapport au repère R, la dérivée du vecteur vitesse de ce même point, au même instant et par rapport au repère R. a. Accélération de M par rapport au temps dans le repère R (accélération absolue) : 誌 M/R = d2OM
dt2
R
=d2x
dt2. x +
d2y
dt2. y +
d2z
dt2. z � �/栗 = 景. 景 + 桂. 桂 + 渓. 渓
b. Accélération de M par rapport au temps dans le repère R1 (accélération relative):
誌 M/R1 = d2O1M dt2
R1
=d2x1
dt2. x 1 +
d2y1
dt2. y 1 +
d2z1
dt2. z 1
誌 �栗層 = 景 層. 景 層 + 桂 層. 桂 層 + 渓 層. 渓 層

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 39
c - Composition des accélérations :
穴2頚警 穴建2
/迎 = 穴撃 (0/迎)穴建 /迎 + 穴( 撃 警/迎1 + Ω R1/R ʌ O1M )穴建
/迎
� M/R = � O1/R + dV M/R1 dt
/R
+ dΩ R1/R dt
/R
ʌ O1M + Ω R1/R ʌ d(O1M )
dt
R
Or on a: d(O1M )
dt
R=
d(O1M )dt
R1
+ Ω R1/R ʌ O1M ) alors on définit :
紘 結 警 = � O1/R + dΩ R1/R dt
/R
ʌ O1M + Ω R1/R ʌ (Ω (R1/R) ʌ O1M ) :
accélération d’entraînement de M dans R accélération complémentaire ou aussi de Coriolis : 紘 潔 警 = 2. Ω R1/R ʌ 撃 M/R1 )
Donc on aura : 誌 三 � = 紘 結 警 + 紘 潔 警 + 紘 迎1
警 Si M est lié à R1 alors : � M/R1 = 0 et � M/R1 = 0
Finalement on peut écrire la relation de composition des accélérations : � M/R = � M/R1 + � M ∈ R1/R + 2. Ω R1/R ʌ 撃 M/R
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 40
Chapitre IV : CINEMATIQUE DE SOLIDES INDEFORMABLE
La cinématique du solide concerne l’étude du mouvement des solides supposés indéformables. Elle tient une place importante dans les applications quotidiennes de la mécanique. 1. Champ des vitesses d’un solide indéformable :
1.1. Définition :
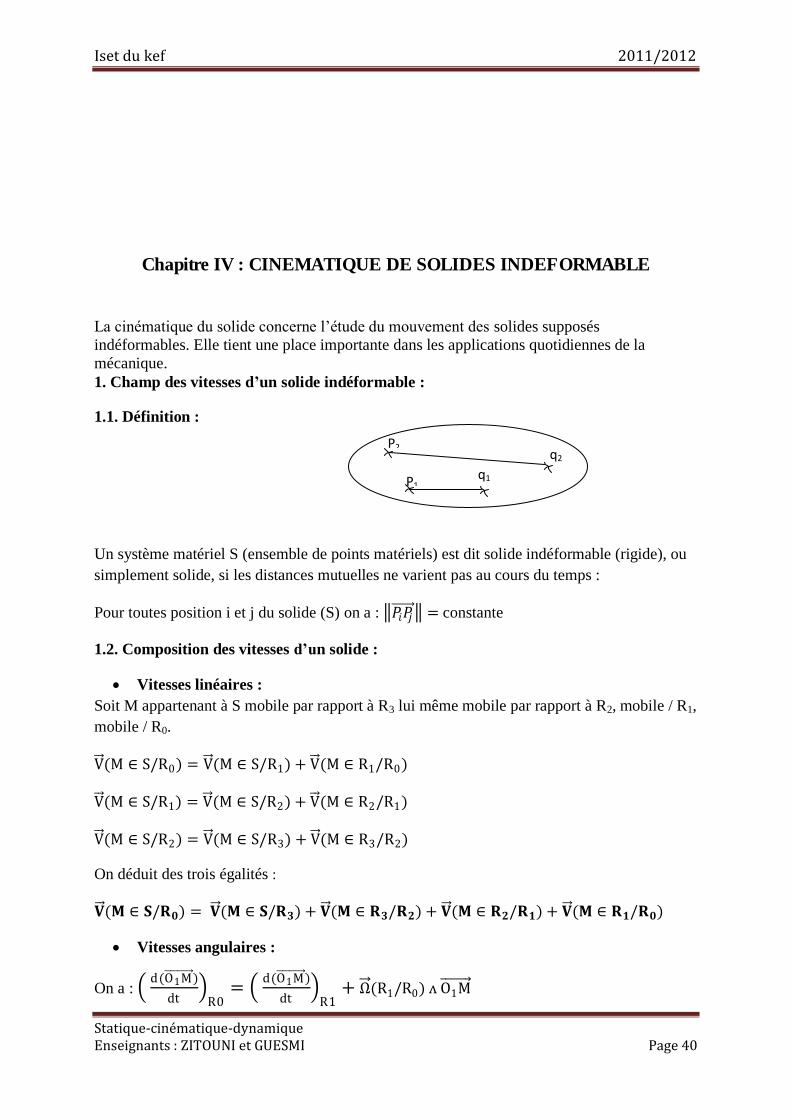
Un système matériel S (ensemble de points matériels) est dit solide indéformable (rigide), ou simplement solide, si les distances mutuelles ne varient pas au cours du temps :
Pour toutes position i et j du solide (S) on a : 鶏件鶏倹 = constante
1.2. Composition des vitesses d’un solide :
Vitesses linéaires : Soit M appartenant à S mobile par rapport à R3 lui même mobile par rapport à R2, mobile / R1, mobile / R0.
V (M ∈ S/R0) = V (M ∈ S/R1) + V (M ∈ R1/R0)
V (M ∈ S/R1) = V (M ∈ S/R2) + V (M ∈ R2/R1)
V (M ∈ S/R2) = V (M ∈ S/R3) + V (M ∈ R3/R2)
On déduit des trois égalités : � (� ∈ 繰/栗宋) = � (� ∈ 繰/栗惣) + � (� ∈ 栗惣/栗匝) + � (� ∈ 栗匝/栗層) + � (� ∈ 栗層/栗宋)
Vitesses angulaires :
On a : d(O1M )
dt
R0=
d(O1M )dt
R1
+ Ω (R1/R0) ʌ O1M
P2
P1
q2
q1
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 41
Et d(O1M )
dt
R1=
d(O1M )dt
R2
+ Ω (R2/R1) ʌ O1M D’où
d(O1M )
dt
R0=
d(O1M )dt
R2
+ Ω (R2/R0) ʌ O1M D’ou la relation entre les vecteurs vitesses instantanés de rotations : � (栗匝/栗宋) = � (栗匝/栗層) + � (栗層/栗宋)
2. Torseur cinématique :
2.1. Composition :
Le torseur cinématique définit en un point A dans un repère R est un torseur dont les éléments de réduction sont les suivants : �(嫌/迎) 畦 = Ω (S/R)
V (A ∈ S/R) 畦/R
Avec : Ω (S/R0) : vitesse instantanée de rotation de S par rapport à R
V (A ∈ S/R) : vitesse linéaire du point (A ∈ S) dans son mouvement pat rapport à R
La transformation du torseur du point A à un autre B : �(嫌/迎) 稽 = Ω (S/R)
V (B ∈ S/R) 稽/R
avec V (B ∈ S/R) = V (A ∈ S/R) + Ω (S/R) ʌ AB Ω (S/R) est l’élément invariant du torseur cinématique
On a aussi �(鯨2/0) 畦 = �(鯨2/1) 畦 + �(鯨1/0) 畦
2.2. Mouvements particuliers : Translation :
Le solide rigide S est dit en translation par rapport au référentiel R si le torseur cinématique est représenté par un torseur couple : �(嫌/迎) 畦 = 0
V (A ∈ S/R) 畦/R
Mouvement de rotation instantanée : Un solide rigide S est dit en rotation par rapport à R si le torseur cinématique est un glisseur : � 鯨/迎 畦 = Ω S/R
0 畦/迎
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 42
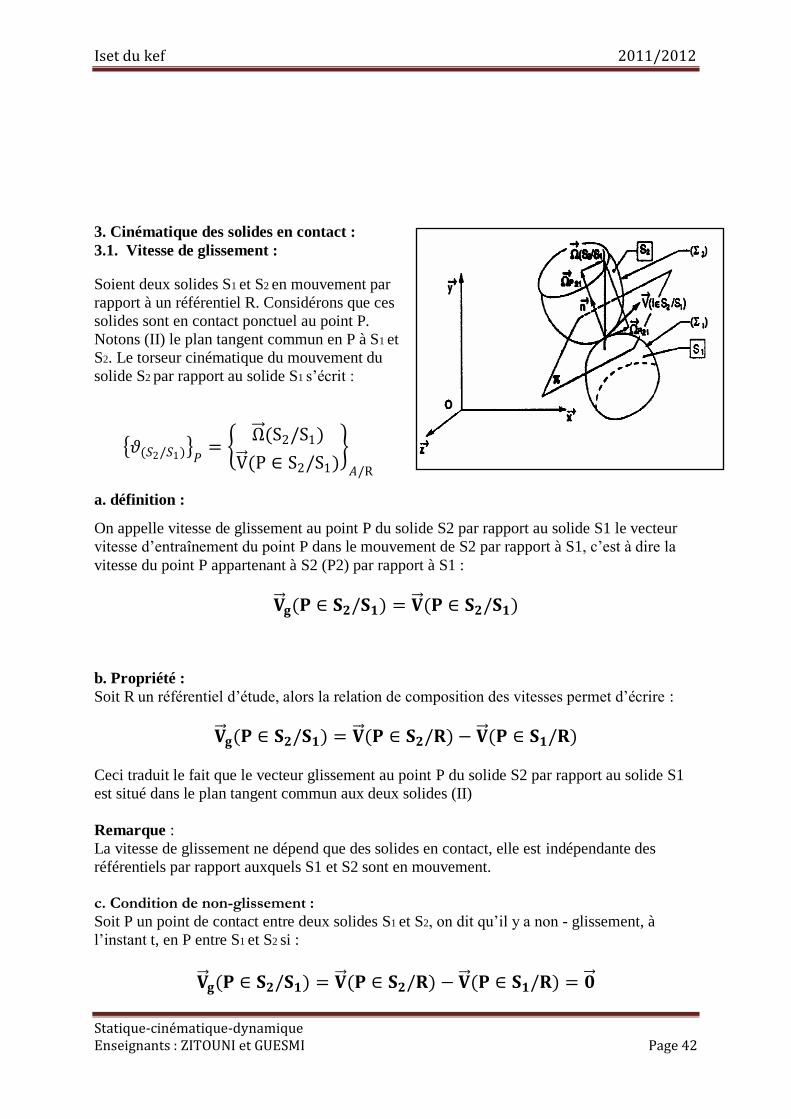
3. Cinématique des solides en contact : 3.1. Vitesse de glissement :
Soient deux solides S1 et S2 en mouvement par rapport à un référentiel R. Considérons que ces solides sont en contact ponctuel au point P. Notons (II) le plan tangent commun en P à S1 et S2. Le torseur cinématique du mouvement du solide S2 par rapport au solide S1 s’écrit :
�(鯨2/鯨1) 鶏 = Ω (S2/S1)
V (P ∈ S2/S1) 畦/R
a. définition :
On appelle vitesse de glissement au point P du solide S2 par rapport au solide S1 le vecteur vitesse d’entraînement du point P dans le mouvement de S2 par rapport à S1, c’est à dire la vitesse du point P appartenant à S2 (P2) par rapport à S1 : � �(隈 ∈ 繰匝/繰層) = � (隈 ∈ 繰匝/繰層)
b. Propriété : Soit R un référentiel d’étude, alors la relation de composition des vitesses permet d’écrire : � �(隈 ∈ 繰匝/繰層) = � (隈 ∈ 繰匝/栗) − � (隈 ∈ 繰層/栗)
Ceci traduit le fait que le vecteur glissement au point P du solide S2 par rapport au solide S1 est situé dans le plan tangent commun aux deux solides (II) Remarque : La vitesse de glissement ne dépend que des solides en contact, elle est indépendante des référentiels par rapport auxquels S1 et S2 sont en mouvement. c. Condition de non-glissement :
Soit P un point de contact entre deux solides S1 et S2, on dit qu’il y a non - glissement, à l’instant t, en P entre S1 et S2 si : � �(隈 ∈ 繰匝/繰層) = � (隈 ∈ 繰匝/栗) − � (隈 ∈ 繰層/栗) = 宋
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 43
4. Vecteur roulement et Vecteur pivotement :
Soit Ω (S2/S1) le vecteur instantané de rotation de S2 par rapport à S1, admet des composantes sur la normale n au contact et dans le plan tangent (II) : Ω (S2/S1) = Ω N (S2/S1) + Ω T(S2/S1) Ω P(S2/S1) = Ω P(S2/S1). n . n : est appelé vecteur pivotement de S2 par rapport à S1. Ω R(S2/S1) = Ω (S2/S1) − Ω P(S2/S1) : Tangent au plan (II), appelé vecteur rotation de roulement du mouvement du solide S2 par rapport à S1 5. Centre instantané de rotation « CIR » :
On appelle centre instantané de rotation (CIR) du mouvement plan sur plan d’un repère R2 par rapport à un repère R1 le point d’intersection I de l’axe central ∆ avec les plans (II1) et (II2) du mouvement.
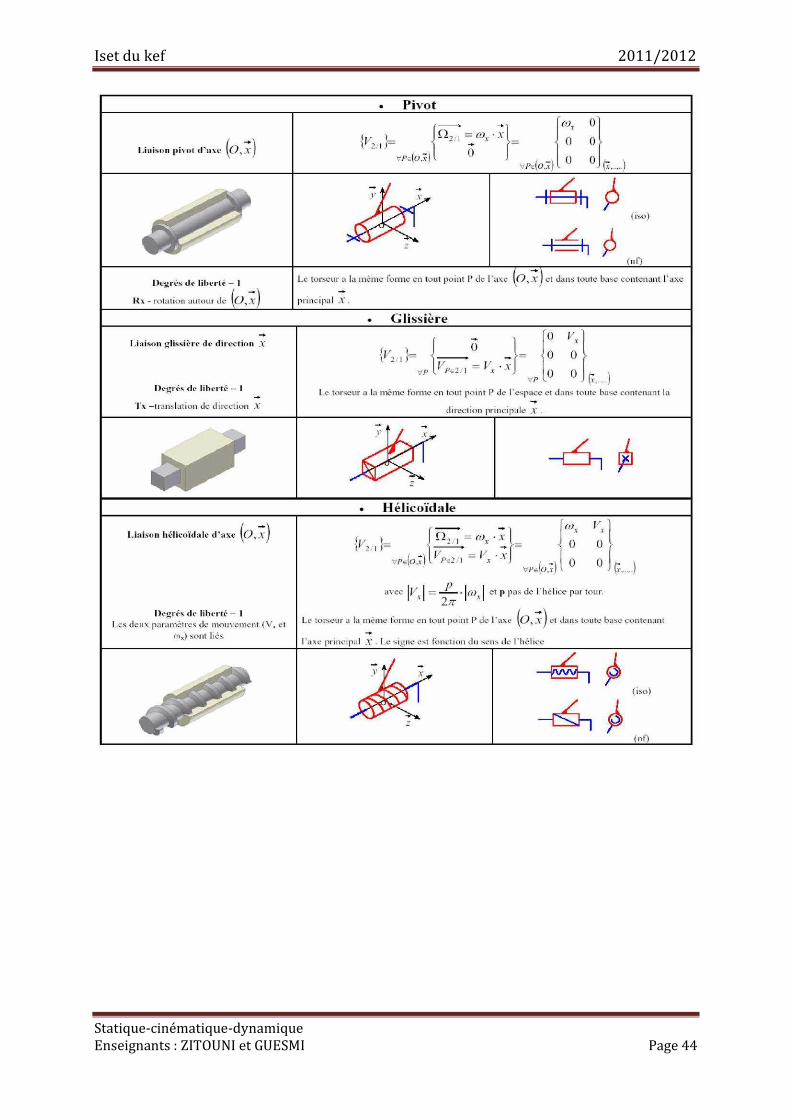
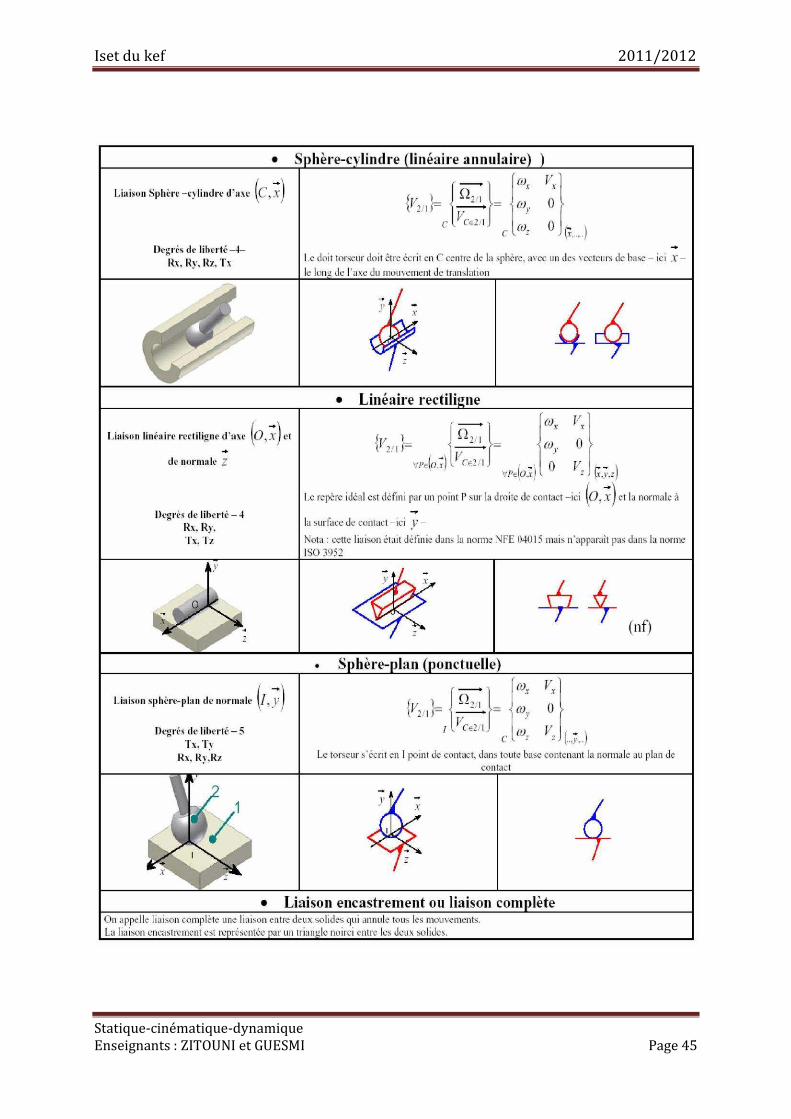
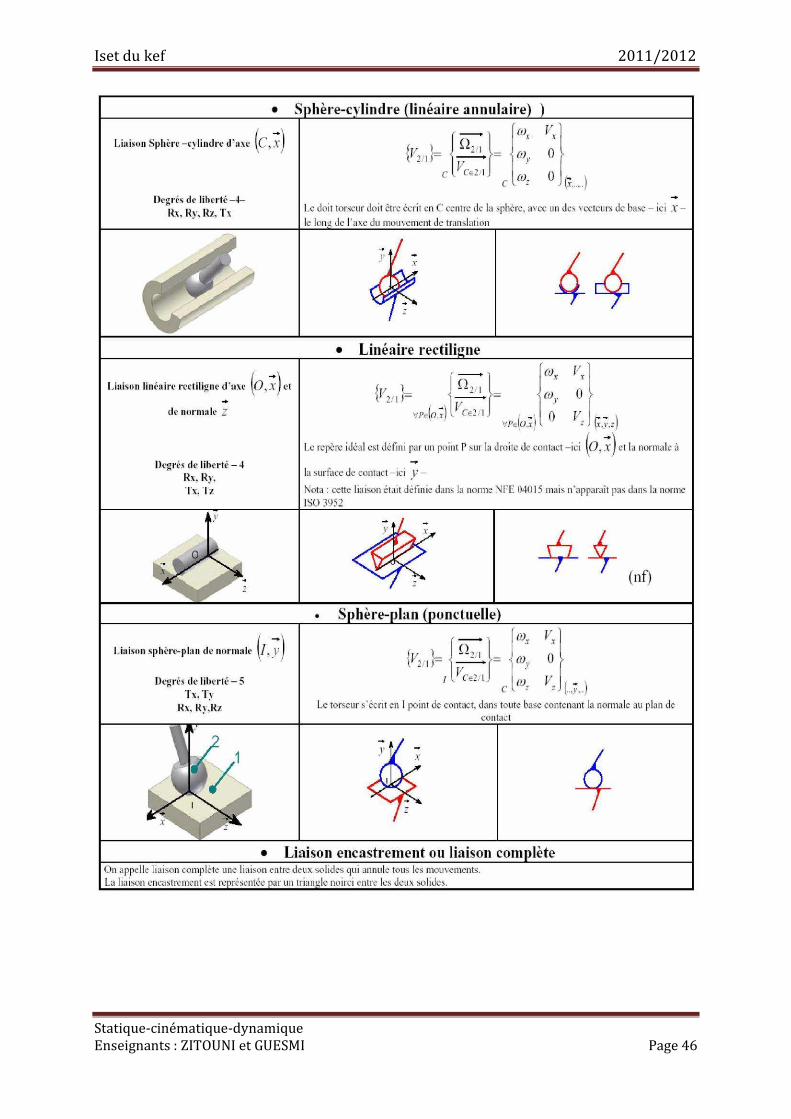
Ce point vérifie : � (� ∈ 栗匝/栗層) = 宋 6. Différentes liaisons normalisées :
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 44
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 45
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 46

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 47
7. Application 1: (Robot de soudure)
Le schéma plan de la figure suivante représente la cinématique simplifiée d’un robot de soudure
On associe à chaque solide i une base orthonormée directe )zy,x ( ii,i .
Les liaisons et le paramétrage des différents bras du robot sont les suivants:
0-1 : liaison pivot d'axe (A, z ); on pose: )y,y( )x,x( α 1010
0-2 : liaison pivot d'axe (A , z ); on pose: )y,y( )x,x( β 2020
1-3 : liaison pivot d'axe (B , z ) ; telle que: 1x L AB
2-4 : liaison pivot d'axe (E , z ) ; telle que: 2x D EA
3-4: liaison pivot d'axe (C,z), telle que: 4x L EC
Par ailleurs: 3 3 x H BJet x D CB .
Les mouvements du robot sont commandés par deux moteurs:
Le solide 1 a son mouvement de rotation commandé par un moteur M 1; 3
2Π , 3Π α
Le solide 2 a son mouvement de rotation commandé par un moteur M 2; 4Π ,
4Π - β

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 48
Questions :
Première partie. Etude dans le cas où 0 β et le moteur M 2 est à l'arrêt.
1- Déterminer le torseur cinématique du mouvement de:
a- 2 par rapport à 0, au point A. b- 1 par rapport à 0, au point A. c- 4 par rapport à 0, au point E. d- 3 par rapport à 0, au point B. e- 3 par rapport à 1, au point B. f- 3 par rapport à 4, au point C.
2- Déterminer le vecteur vitesse du point J appartenant à 3, par rapport à 0: 3/0)(jV
3- Définir et tracer la trajectoire du point J dans 0.
Deuxième partie. Etude dans le cas où 3Π α et le moteur M l est à l'arrêt.
1- Déterminer le torseur cinématique du mouvement de:
a- 1 par rapport à 0, au point A.
b- 2 par rapport à 0, au point A.
c- 4 par rapport à 0, au point E.
d- 3 par rapport à 0, au point B.
e- 3 par rapport à 1, au point B. f- 4 par rapport à 2, au point E.
2- Déterminer le vecteur vitesse du point J appartenant à 3, par rapport à 0: 3/0)(jV
3- Définir et tracer la trajectoire du point J dans 0.
Troisième partie. Les deux moteurs fonctionnent.
1- Déterminer le vecteur vitesse du point J appartenant à 3, par rapport à 0: 3/0)(JV
2- Tracer sur une figure la surface liée à 0 dans laquelle se déplace le point J lorsque βet α
varient dans les limites définies précédemment.

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 49
Réponses
Première partie :
1-a- Le torseur cinématique du mouvement de 2 par rapport à 0, s'écrit au point A:
0 2/0)(AV 0 (2/0) Ω
AA (2/0) υ
1-b- Le torseur cinématique du mouvement de 1 par rapport à 0, s'écrit au point A:
0 2/0)(AV z α (2/0) Ω
AA (2/0) υ
1-c- Le torseur cinématique du mouvement de 4 par rapport à 0, s'écrit au point E:
0 4/0)(EV z α (4/0) Ω
EE (2/0) υ
1-d- Le torseur cinématique du mouvement de 3 par rapport à 0, s'écrit au point B:
1
y α L 3/0)(BV
0 (3/0) Ω
BB (2/0) υ
En effet : 11 y α L x L z α AB (1/0)Ω 1/0)(AV 1/0)(BV 3/0)(BV
Le solide 3 a un mouvement de translation circulaire par rapport à 0.
1-e- Le torseur cinématique du mouvement de 3 par rapport à 1 , s’écrit au point ψ :
0 3/1)(BV
z α - (3/1) Ω
BB (3/1) υ
en effet z α - )1/0( )0/3( )1/3(
1-f- Le torseur cinématique du mouvement de 3 par rapport à 4 , s’écrit au point ω :
0 3/4)(BV
z α - (3/4) Ω
CC (3/4) υ
en effet z α - )4/0( )0/3( )4/3(
2- Les points J et B appartiennent au même solide 3 ; on peut écrire :
11 y α L x L z α 3/0)(BV BJ (3/0)Ω 3/0)(JV 3/0)(JV
Le solide 3 a un mouvement de translation circulaire par rapport à 0.

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 50
3- Dans le mouvement de translation circulaire du solide 3 par rapport à 0, les points de 3 décrivent dans 0 des trajectoires parallèles .Par conséquent, la trajectoire du point J est un Arc de cercle de rayon L et de centre K, quatrième sommet du parallélogramme ABJK .Le point K
est tel que 0x H AK .
Deuxième partie
1-a- Le torseur cinématique du mouvement de 1 par rapport à 0, s’écrit au point A :
0 1/0)(AV 0 (1/0) Ω
AA (1/0) υ
1-b- Le torseur cinématique du mouvement de 2 par rapport à 0, s’écrit au point A :
0 2/0)(AV z β (2/0) Ω
AA (2/0) υ
1-c- Le torseur cinématique du mouvement de 4 par rapport à 0, s’écrit au point E :
2
y β D 4/0)(AV
0 (4/0) Ω
EE (4/0) υ
En effet : 22 y β D - x D- z β AE (2/0)Ω 2/0)(AV 2/0)(EV 4/0)(EV
Le solide 4 a un mouvement de translation circulaire par rapport à 0.
1-d- Le torseur cinématique du mouvement de 3 par rapport à 0, s’écrit au point B :
0 3/0)(BV z β (3/0) Ω
BB (3/0) υ
1-e- Le torseur cinématique du mouvement de 3 par rapport à 1, s’écrit au point B :

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 51
0 3/1)(BV z β (3/1) Ω
BB (3/1) υ
en effet z β )1/0( )0/3( )1/3(
1-f- Le torseur cinématique du mouvement de 4 par rapport à 2, s’écrit au point E :
0 4/2)(EV z β - (4/2) Ω
EE (4/2) υ
en effet z β - )2/0( )0/4( )2/4(
2- Les points J et B appartiennent au même solide 3 ; on peut écrire :
33 y β H x H z β BJ (3/0)Ω 3/0)(BV 3/0)(JV
Le solide 3 a un mouvement de rotation autour du point B, par rapport à 0.
3- La trajectoire du point J du solide 3 dans 0 est un arc de cercle de centre B et de rayon H.
Troisième partie
1- Les points J et B appartiennent au même solide 3 ; on peut écrire :
BJ (3/0)Ω 3/0)(BV 3/0)(JV
Les points B et A appartiennent au même solide 1 ; alors :
11 y α L x L z α AB (1/0)Ω 1/0)(AV 1/0)(BV
D’ou : 31 31 y H β y α L 3/0)(JVSoit x H z β y α L 3/0)(JV

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 52
2-
Compte-tenu des résultats précédents, le domaine PQRS que peut décrire l'extrémité J du bras 3 du robot est délimité par les quatre arcs de cercle suivants:
-arc de cercle de centre K1, de rayon L .
-arc de cercle de centre K2, de rayon L .
-arc de cercle de centre B1, de rayon H.
-arc de cercle de centre B2, de rayon H.
Les points K1 et K2 définissent les positions extrêmes du point K et les points B1 et B2 celles du point B.

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 53
Travaux Dirigés Mécanique Générale (Cinématique)
Exercice 1 :
Un disque mince, de rayon r roule sans glisser à l’intérieur d’un anneau fixe de rayon R.
La position du disque est déterminée par l’angle ),( ux et par l’angle φ, angle de rotation du
disque autour de son centre dans le repère zyxC ,,,
on demande de calculer :
1 – le vecteur vitesse de la particule du disque en
contact avec l’anneau. En déduire la condition
de roulement sans glissement.
Exercice II : (Etude d’une palette d’une hélice)
Une pale d’hélicoptère peut être schématiquement représentée par une palette plane mobile
autour d’un axe x , solidaire d’un disque de rayon R tournant autour de l’axe vertical 0z avec
une vitesse angulaire ω constante. La position de la palette est déterminée par l’angle ),( uy. Sachant que ).sin(.0 ta .
Déterminer le vecteur vitesse de l’extrémité A de la palette de longueur L.
X
X
Y
Y
U
P
A
C
O
ψ
X0
Y0
Z0
Z
X
Y
U
P φ φ
ψ
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 54
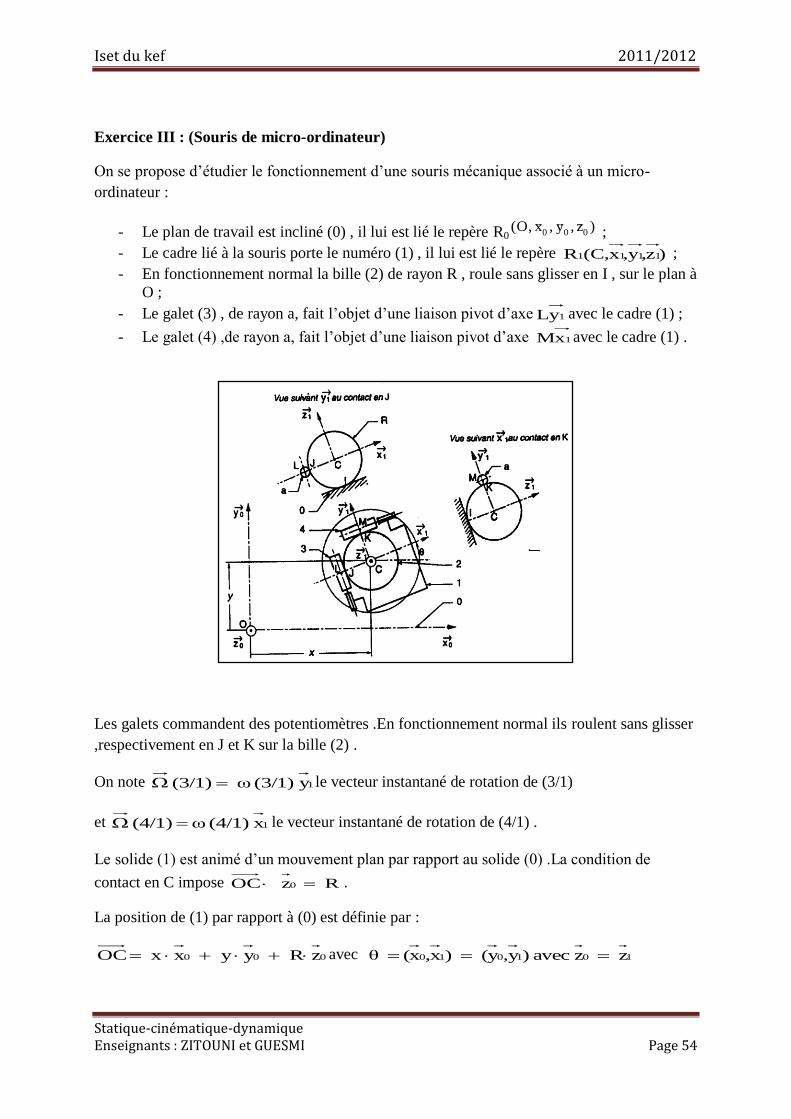
Exercice III : (Souris de micro-ordinateur)
On se propose d’étudier le fonctionnement d’une souris mécanique associé à un micro-ordinateur :
- Le plan de travail est incliné (0) , il lui est lié le repère R0 ( , , , ) O x y z
0 0 0 ; - Le cadre lié à la souris porte le numéro (1) , il lui est lié le repère )z,y,x(C,R 1111 ; - En fonctionnement normal la bille (2) de rayon R , roule sans glisser en I , sur le plan à
O ; - Le galet (3) , de rayon a, fait l’objet d’une liaison pivot d’axe 1yL avec le cadre (1) ;
- Le galet (4) ,de rayon a, fait l’objet d’une liaison pivot d’axe 1xM avec le cadre (1) .
Les galets commandent des potentiomètres .En fonctionnement normal ils roulent sans glisser ,respectivement en J et K sur la bille (2) .
On note 1y (3/1) ω (3/1) le vecteur instantané de rotation de (3/1)
et 1x (4/1) ω (4/1) le vecteur instantané de rotation de (4/1) .
Le solide (1) est animé d’un mouvement plan par rapport au solide (0) .La condition de contact en C impose R z OC 0 .
La position de (1) par rapport à (0) est définie par :
000 z R y y x x OC avec 101010 z z avec )y,y( )x,x( θ

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 55
Le torseur cinématique associé au mouvement de la bille (2) par rapport au cadre (1) est défini par :
0 0 0
C 0 2/1)(CV
zr y q x p (2/1) Ω (2/1) C
υ
Pour l’instant les composantes p, q et r du vecteur instantané de rotation sont inconnues .On se donne le mouvement du cadre (1) par rapport au plan (0) .A savoir :
00
0 C
y y x x 1/0)(CV z θ (1/0) Ω (1/0)
C
Questions :
a) Expliquer la condition de roulement sans glissement en I .En déduire le vecteur
instantané de rotation )1/2( en fonction des données. b) Expliquer la condition de roulement sans glissement en J .En déduire le vecteur
instantané de rotation )1/3( en fonction des données. c) Expliquer la condition de roulement sans glissement en K .En déduire le vecteur
instantané de rotation )1/4( en fonction des données.
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 56
Troisième partie
DYNAMIQUE DES SOLIDES
Chapitre I : GEOMETRIE DES MASSES
Chapitre II : TORSEUR CINETIQUE
Chapitre III : DYNAMIQUE DES SOLIDES INDEFORMABLES
Chapitre IV : PUISSANCE ET TRAVAIL
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 57
Chapitre I : GEOMETRIE DES MASSES 1. Notions de masse d’un système matériel : 1.1. définition : A chaque système matériel (S) est associé, une quantité scalaire positive invariable en mécanique classique, appelée : masse du système La masse d’un solide fait référence à la quantité de matière contenue dans le volume de ce solide. 1.2. Grandeur de masse : 1.2.1. Systèmes discrets : La masse d’un système matériel discret (S) est égale à la somme des masses qui le composent. La masse d’un système matériel est définie par la grandeur scalaire suivante :
m = mi
n
i=1
1.2.2. Systèmes continus : Si le système est constitué d’un ensemble continu de masses, la masse du système s’écrirait sous la forme d’une intégrale continue :
m = dm(P)(S)
L’élément est la mesure de la masse dm(P) au voisinage du point (P). Le système (S) est un volume :
m = び(P)v
dv び(P) la masse volumique au point P et dv un élément de volume du solide (S) Le système (S) est une surface : (cas des plaques fines) l’épaisseur est négligeable
devant les deux autres dimensions. ぴ(P) est la densité surfacique au point P et ds un élément de surface du solide (S)

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 58
Le système (S) est linaire : (cas des tiges fines) les deux dimensions sont négligeables devant la longueur de la tige.
m = ʎ(P)s
dl
ʎ(P) est la densité linéique au point P et dl un élément de longueur du solide (S) Dans les systèmes homogènes (solides homogènes) la densité des solides est constante
2. Centre d’inertie (centre de masse) des solides : On appelle centre d’inertie d’un système matériel (S) le point G défini par la relation : 罫鶏 穴兼鶏∈鯨 = 0 Où P est un point du solide avec OP = Xi + Yj + Zk et avec OG = XGi + YG j + ZG k Soit O le centre d’un repère orthonormé (O, i , j , k ) nous pouvons écrire dans ce repère :
OP = OG + GP ⇒ OP dmP∈S
= OG dmP∈S
+ GP dmP∈S
Or on a GP dm
P∈S= 0 alors nous obtenons :
OG =1
m OP dm
P∈S
Les coordonnées du centre d’inertie G d’un système homogène sont déterminées par des calculs utilisant les éléments infinitésimaux tel que : dl pour les éléments linéaires, ds pour les éléments surfaciques et dv pour les éléments volumiques. Ainsi nous pouvons écrire : 隙罫 =
1兼 捲穴兼鶏∈鯨 ; 桁罫 =1兼 検穴兼鶏∈鯨 ; 傑罫 =
1兼 権穴兼鶏∈鯨
Remarque : - Le centre d’inertie des masses homogènes coïncide avec le centre d’inertie de leurs volumes
s’ils sont volumiques ou de leurs surfaces s’ils sont surfaciques. - Si le solide présente des éléments de symétrie (axes ou plans) son centre d’inertie est
nécessairement situé sur ces éléments de symétrie. 3. Centre d’inertie d’un système composé :
XG = ximi
ni=1 mi
ni=1
; YG = yimi
ni=1 mi
ni=1
; ZG = zimi
ni=1 mi
ni=1
Avec mi la masse du solide Si de S et xi ,yi et zi du point Gi le centre de masse de Si 4. Théorème de Guldin :

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 59
Une seconde méthode pour la détermination des centres d’inertie des solides linéaires ou surfaciques homogènes fut trouvée par Guldin. Elle consiste à faire tourner ces solides autour des axes qu’ils n’interceptent pas. Les solides linéaires décriront des surfaces et les solides surfaciques décriront des volumes.
4.1. 1er
Théorème de Guldin : La surface S engendrée par la rotation d’un arc de courbe de longueur L autour d’un axe (Δ) sans l’intercepter dans son plan est égale au produit de la longueur L de l’arc par la longueur de la circonférence 2�迎罫 décrite par le centre d’inertie G de l’arc de courbe. Soit L la longueur de l’arc et RG sont centre d’inertie. La longueur (périmètre) décrite par la rotation du centre d’inertie G par rapport à l’axe (Δ) est donnée par : 2�迎罫, Alors la surface décrite par cet élément est égale à : 鯨/∆ = 2�迎罫詣 ⇒ 迎罫 =
鯨/∆2�詣
Dans le cas d’un système homogène de plusieurs éléments on aura :
迎罫 =鯨建剣建欠健結 /∆2�詣建剣建欠健結
4.2. Deuxième Théorème de Guldin : Une surface plane homogène, limitée par une courbe fermée S simple et tournant autour d’un axe (Δ) sans le rencontrer engendre un volume V. Le volume V engendré est égal au produit de la surface S par la longueur du périmètre 2ぱRG décrit par le centre d’inertie G de cette surface autour de l’axe (Δ). 撃/∆ = 2�迎罫鯨 ⇒ 迎罫 =
撃/∆2�鯨
Dans le cas d’un système homogène de plusieurs éléments on aura : 迎罫 =撃建剣建欠健結 /∆2�鯨建剣建欠健結
5. moment et produit d’inertie d’inertie :
5.1. Moment d’inertie :
par rapport à un point : On appelle moment d'inertie du solide S par rapport à un point A la quantité positive: 薩� 傘 = (�皿)匝皿∈傘 ��
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 60
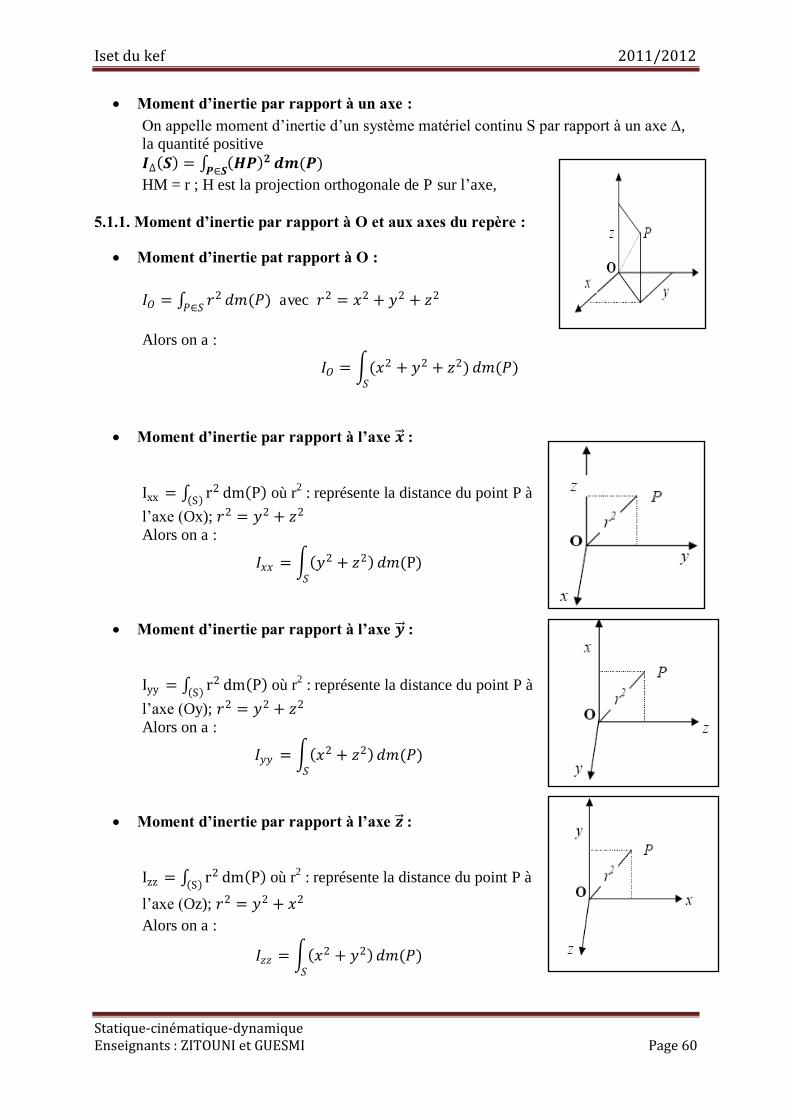
Moment d’inertie par rapport à un axe : On appelle moment d’inertie d’un système matériel continu S par rapport à un axe , la quantité positive 薩∆ 傘 = 殺皿 匝皿∈傘 ��(皿) HM = r ; H est la projection orthogonale de P sur l’axe,
5.1.1. Moment d’inertie par rapport à O et aux axes du repère :
Moment d’inertie pat rapport à O : 荊頚 = 堅2鶏∈鯨 穴兼(鶏) avec 堅2 = 捲2 + 検2 + 権2 Alors on a : 荊頚 = (捲2 + 検2 + 権2)鯨 穴兼(鶏)
Moment d’inertie par rapport à l’axe 姉 : Ixx = r2 S dm P où r2 : représente la distance du point P à
l’axe (Ox); 堅2 = 検2 + 権2 Alors on a : 荊捲捲 = 検2 + 権2 鯨 穴兼(P)
Moment d’inertie par rapport à l’axe 姿 : Iyy = r2 S dm P où r2 : représente la distance du point P à
l’axe (Oy); 堅2 = 検2 + 権2 Alors on a : 荊検検 = 捲2 + 権2 鯨 穴兼(鶏)
Moment d’inertie par rapport à l’axe 子 : Izz = r2 S dm P où r2 : représente la distance du point P à
l’axe (Oz); 堅2 = 検2 + 捲2 Alors on a : 荊権権 = 捲2 + 検2 鯨 穴兼(鶏)

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 61
Les moments d’inertie par rapport aux plans (xOy), (xOz), (yOz) sont donnés en fonction de la distance qui sépare le point (P) du plan considéré, ce qui se traduit par les équations suivantes : 荊捲頚検 = 権2 鯨 穴兼 鶏 ; 荊捲頚権 = 検2 鯨 穴兼 鶏 ; 荊検頚権 権2 鯨 穴兼(鶏)
Il résulte des différentes relations précédentes que : La somme des moments d’inertie d’un solide par rapport aux trois axes d’un repère
orthonormé est égale au double du moment d’inertie du solide par rapport au centre du repère.
荊捲捲 + 荊検検 + 荊権権 = 検2 + 権2 鯨 穴兼 P + 捲2 + 権2 鯨 穴兼 鶏 + 捲2 + 検2 鯨 穴兼(鶏)
D’où on a : 荊捲捲 + 荊検検 + 荊権権 = 2荊0
La somme des moments d’inertie d’un solide par rapport à deux plans perpendiculaires est égale au moment d’inertie du solide par rapport à l’axe d’intersection des deux plans : 荊検頚捲 + 荊権頚捲 = 荊捲捲 ; 荊捲頚検 + 荊権頚検 = 荊検検 ; 荊検頚権 + 荊捲頚権 = 荊権権
5.2. Produit d’inertie :
Le produit d’inertie caractérise l’absence de symétrie dans la répartition des masses.
On définit : 荊捲検 = 捲検穴兼鯨 : Produit d’inertie du solide S par rapport à l’axe (Ox) et (Oy) 荊検権 = 捲検穴兼鯨 : Produit d’inertie du solide S par rapport à l’axe (Oy) et (Oz) 荊捲権 = 捲検穴兼鯨 : Produit d’inertie du solide S par rapport à l’axe (Ox) et (Oz)
6. Opérateur d’inertie :
6.1. Définition :
On appelle opérateur d'inertie (JO(S)) au point O d'un solide S l'opérateur qui à tout vecteur u de l’espace associe le vecteur : 蛍 頚(憲 ) (頚鶏 ʌ 憲 )� ʌ頚鶏 穴兼
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 62
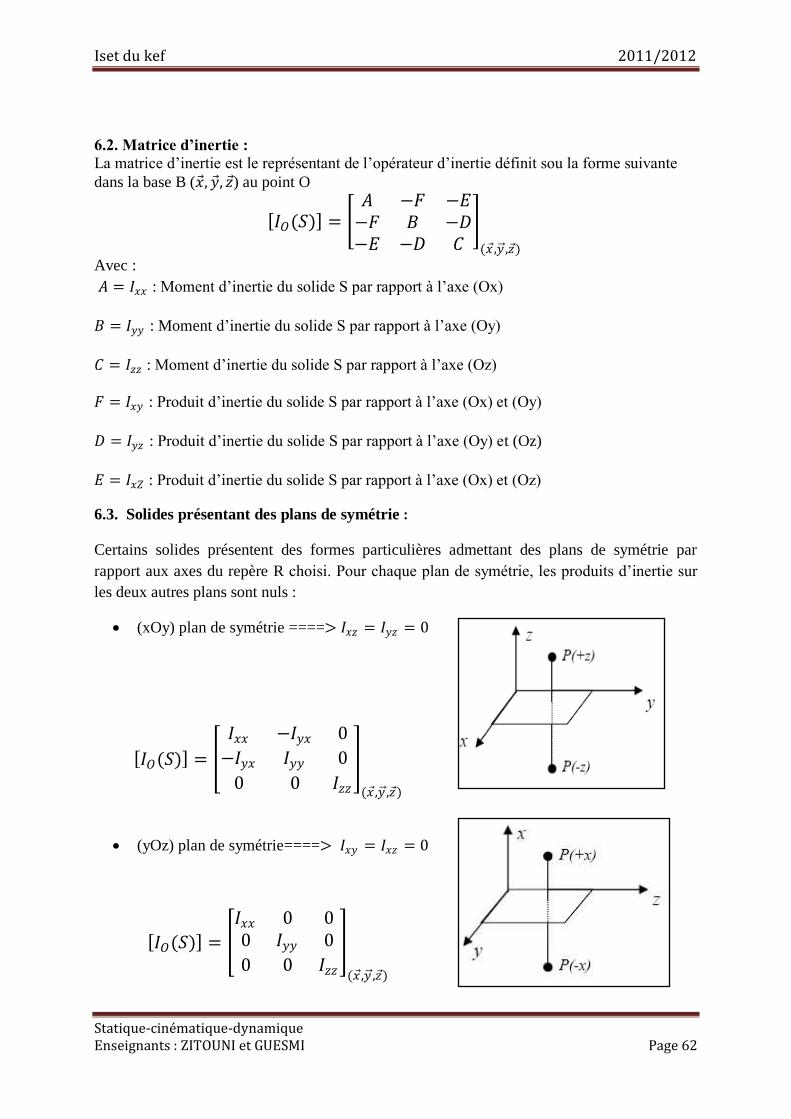
6.2. Matrice d’inertie : La matrice d’inertie est le représentant de l’opérateur d’inertie définit sou la forme suivante dans la base B (捲 , 検 , 権 ) au point O 荊頚(鯨) = 畦 −繋 −継−繋 稽 −経−継 −経 系
(捲 ,検 ,権 )
Avec : 畦 = 荊捲捲 : Moment d’inertie du solide S par rapport à l’axe (Ox) 稽 = 荊検検 : Moment d’inertie du solide S par rapport à l’axe (Oy) 系 = 荊権権 : Moment d’inertie du solide S par rapport à l’axe (Oz) 繋 = 荊捲検 : Produit d’inertie du solide S par rapport à l’axe (Ox) et (Oy) 経 = 荊検権 : Produit d’inertie du solide S par rapport à l’axe (Oy) et (Oz) 継 = 荊捲傑 : Produit d’inertie du solide S par rapport à l’axe (Ox) et (Oz)
6.3. Solides présentant des plans de symétrie :
Certains solides présentent des formes particulières admettant des plans de symétrie par rapport aux axes du repère R choisi. Pour chaque plan de symétrie, les produits d’inertie sur les deux autres plans sont nuls :
(xOy) plan de symétrie ====> 荊捲権 = 荊検権 = 0
荊頚(鯨) = 荊捲捲 −荊検捲 0−荊検捲 荊検検 0
0 0 荊権権 (捲 ,検 ,権 )
(yOz) plan de symétrie====> 荊捲検 = 荊捲権 = 0
荊頚(鯨) = 荊捲捲 0 0
0 荊検検 0
0 0 荊権権 (捲 ,検 ,権 )

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 63
Si (xOz) est un plan de symétrie ====> 荊捲検 = 荊検権 = 0
荊頚(鯨) = 荊捲捲 0 −荊捲権0 荊検検 0−荊捲権 0 荊権権
(捲 ,検 ,権 )
6.4. Solides présentant un axe de symétrie :
Si (OX) est un axe de symétrie du solide (S) : B = C ==> 荊検検 = 荊権権
Si (Oy) est un axe de symétrie du solide (S) : A = C ==> 荊捲捲 = 荊権権
Si (Oz) est un axe de symétrie du solide (S) : B = C ==> 荊検検 = 荊捲捲
7. Théorème de HUYGENS :
Si le tenseur d’inertie est connu au centre d’inertie G du solide (S) dans la base ; alors on peut déterminer le tenseur d’inertie au point O dans la même base. Soit 頚罫 = 隙罫捲0 + 桁罫検0 + 傑罫権0 Si le solide (S) est de masse m on aura : 荊頚捲捲 = 荊罫捲捲 + 兼(桁罫2 + 傑罫2) 荊頚検検 = 荊罫検検 + 兼(隙罫2 + 傑罫2) 荊頚権権 = 荊罫権権 + 兼(隙罫2 + 桁罫2) 荊頚捲検 = 荊罫捲検 + 兼(隙罫 . 桁罫) 荊頚捲権 = 荊罫捲権 + 兼(隙罫 . 傑罫) 荊頚検権 = 荊罫検権 + 兼(権罫 . 桁罫)
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 64
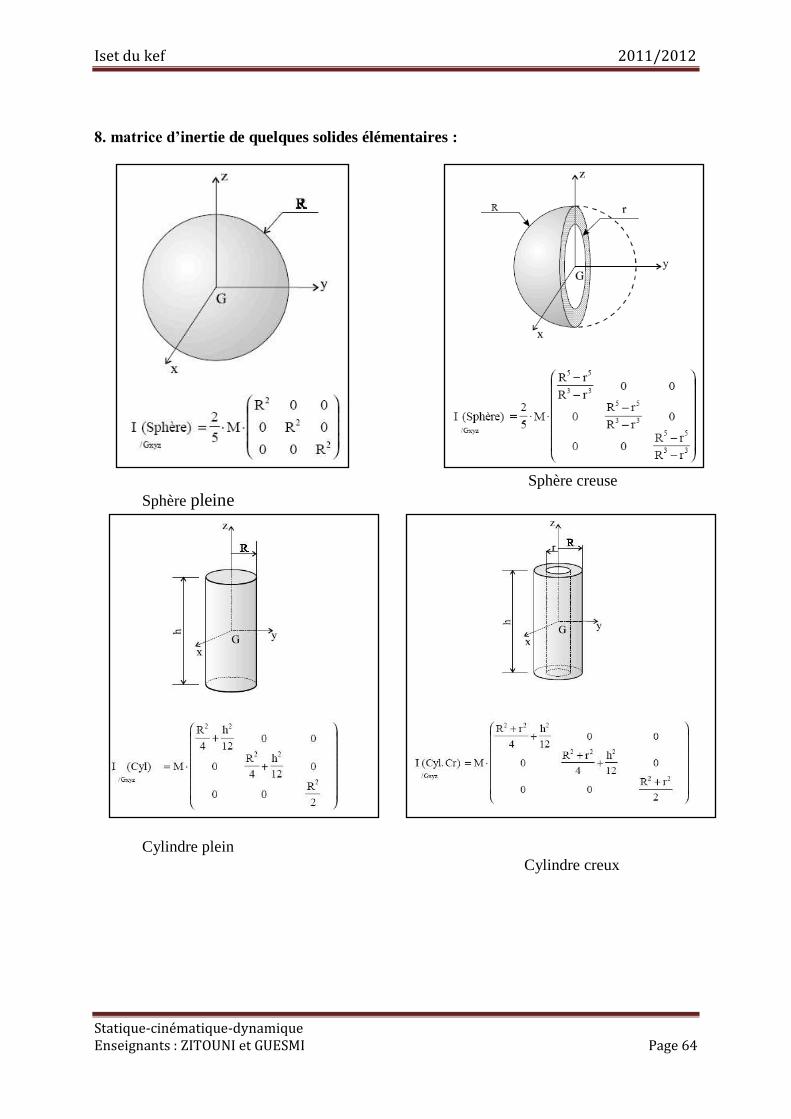
8. matrice d’inertie de quelques solides élémentaires :
Sphère creuse Sphère pleine
Cylindre plein Cylindre creux
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 65
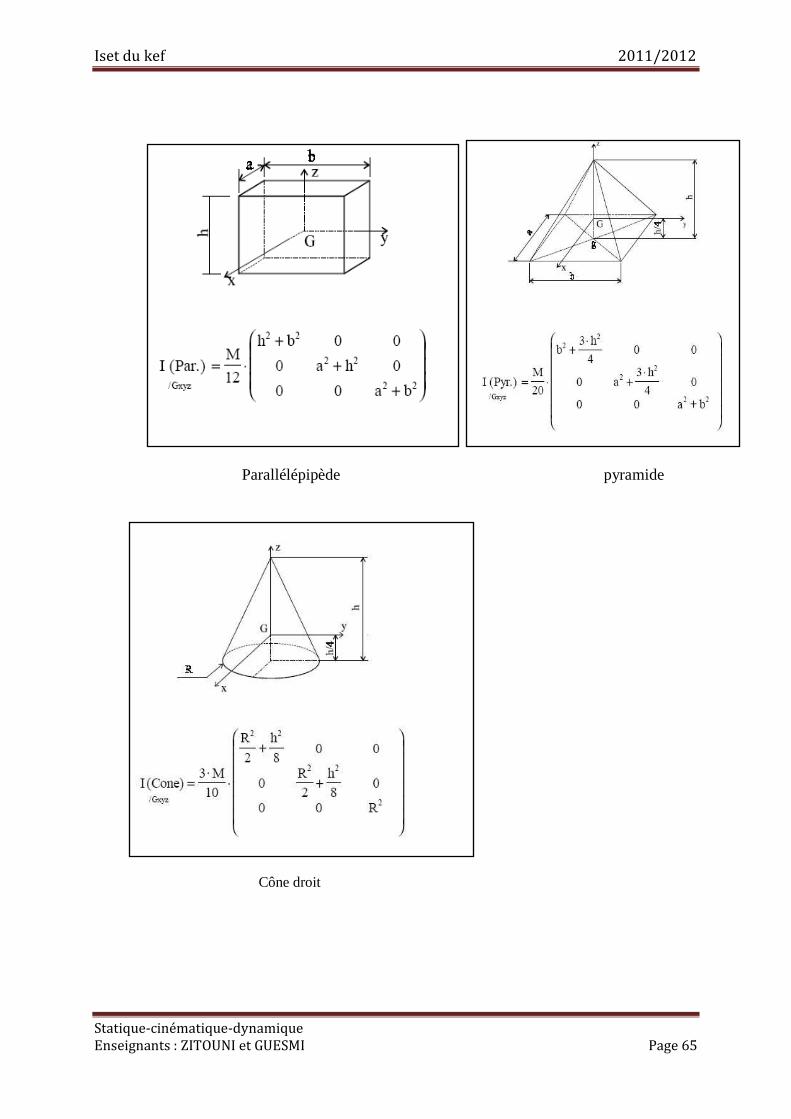
Parallélépipède pyramide
Cône droit
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 66
Travaux Dirigés Mécanique Générale (Cinématique)
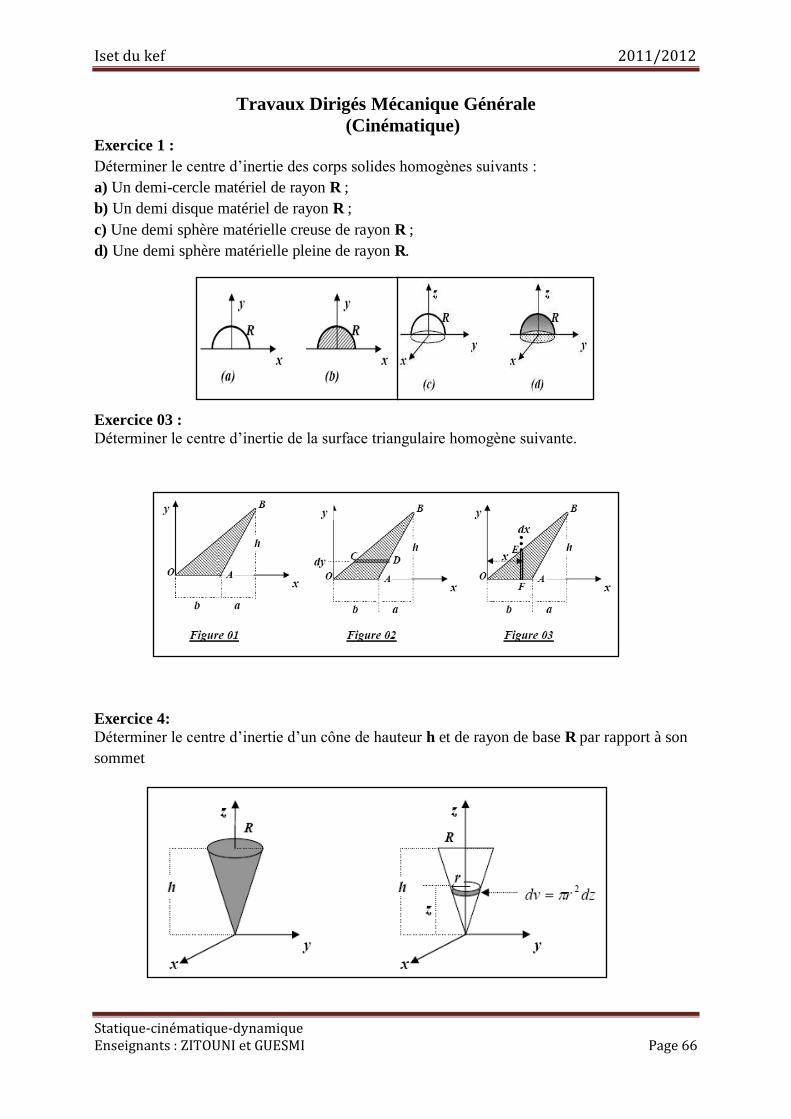
Exercice 1 : Déterminer le centre d’inertie des corps solides homogènes suivants : a) Un demi-cercle matériel de rayon R ; b) Un demi disque matériel de rayon R ; c) Une demi sphère matérielle creuse de rayon R ; d) Une demi sphère matérielle pleine de rayon R.
Exercice 03 : Déterminer le centre d’inertie de la surface triangulaire homogène suivante.
Exercice 4: Déterminer le centre d’inertie d’un cône de hauteur h et de rayon de base R par rapport à son sommet
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 67
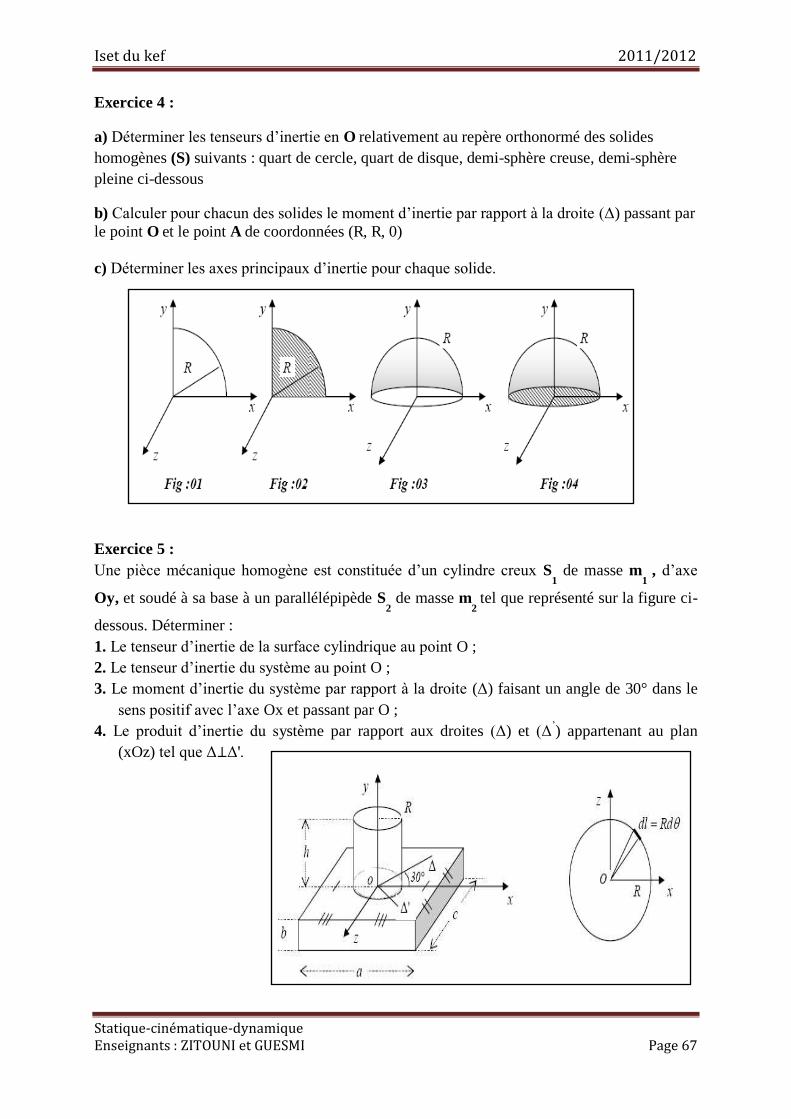
Exercice 4 :
a) Déterminer les tenseurs d’inertie en O relativement au repère orthonormé des solides homogènes (S) suivants : quart de cercle, quart de disque, demi-sphère creuse, demi-sphère pleine ci-dessous
b) ωalculer pour chacun des solides le moment d’inertie par rapport à la droite (Δ) passant par le point O et le point A de coordonnées (R, R, 0) c) Déterminer les axes principaux d’inertie pour chaque solide.
Exercice 5 : Une pièce mécanique homogène est constituée d’un cylindre creux S
1 de masse m
1 , d’axe
Oy, et soudé à sa base à un parallélépipède S2 de masse m
2 tel que représenté sur la figure ci-
dessous. Déterminer : 1. Le tenseur d’inertie de la surface cylindrique au point O ; 2. Le tenseur d’inertie du système au point O ; 3. Le moment d’inertie du système par rapport à la droite (Δ) faisant un angle de 30° dans le
sens positif avec l’axe Ox et passant par O ; 4. Le produit d’inertie du système par rapport aux droites (Δ) et (Δ’) appartenant au plan
(xOz) tel que Δ⊥Δ'.
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 68
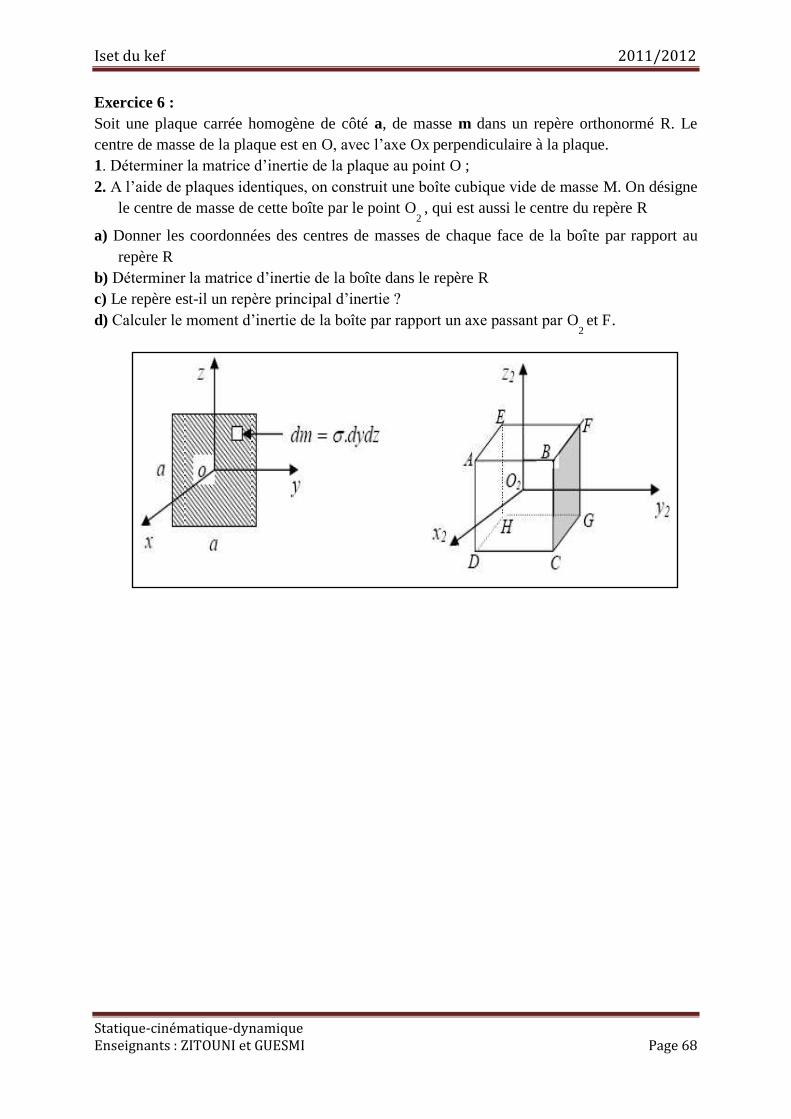
Exercice 6 : Soit une plaque carrée homogène de côté a, de masse m dans un repère orthonormé R. Le centre de masse de la plaque est en O, avec l’axe Ox perpendiculaire à la plaque. 1. Déterminer la matrice d’inertie de la plaque au point O ; 2. A l’aide de plaques identiques, on construit une boîte cubique vide de masse M. On désigne
le centre de masse de cette boîte par le point O2 , qui est aussi le centre du repère R
a) Donner les coordonnées des centres de masses de chaque face de la boîte par rapport au repère R
b) Déterminer la matrice d’inertie de la boîte dans le repère R c) Le repère est-il un repère principal d’inertie ? d) ωalculer le moment d’inertie de la boîte par rapport un axe passant par O
2 et F.

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 69
Chapitre II : TORSEUR CINETIQUE
1. définition :
Le torseur cinétique est le torseur des quantités de mouvement d'un système matériel (S) dans son mouvement par rapport au référentiel R.
C(S/R) A=
R C(S/R) = V (S/R)S
dmぴ A (S/R) = AM ʌ V (M/R)dmS
A
迎 系(鯨/迎) : Résultante cinétique ou quantité de mouvement de l'ensemble matériel E dans son mouvement par rapport à R
� 畦(鯨/迎) : Moment cinétique au point A de l'ensemble matériel E dans son mouvement par rapport à R.
2. Résultante cinétique :
Soit O un point lié à R et G le centre d'inertie de l'ensemble matériel S de masse m, par définition du centre d'inertie on a : 兼 頚罫 = 頚警 穴兼 en dérivant par rapport au temps dans R,
m d
dtOG
R
= d
dt OM dm
S
R
= ( d
dtOM
R
)dmS
= V (S/R)S
dm
D’où on a finalement :
栗 �(繰/栗) = � (繰/栗)繰 �型 = 型. � (�/栗)
Pour un système composé de n sous système la résultante cinétique s’écrit sous la forme suivante :
栗 �(繰/栗) = 型�� (��/栗)
契�=層
Avec Gi et mi sont respectivement le centre de masse et la masse du sou système Si
3. Moment cinétique :
Le moment cinétique au point A peut s'écrire : ぴ A (S/R) = AM ʌ V (M/R)dmS

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 70
Or on a V (M ∈ S/R) = V (A ∈ S/R) + Ω (S/R) ʌ AM ぴ A (S/R) = AM ʌ V (A ∈ S/R)dmS
+ AM ʌ( Ω (S/R) ʌ AM )dmS
On reconnaît dans le premier terme la définition du centre d'inertie G: AM ʌ V (A ∈ S/R)dmS
= mAG ʌV (A ∈ S/R)
On reconnaît dans le deuxième terme l'opérateur d'inertie du solide S au point A, AM ʌ( Ω (S/R) ʌ AM )dmS
= IA (S/R) . Ω (S/R)
On aura finalement pour un système homogène : 蘇 �(繰/栗) = 型 �� ʌ � (� ∈ 繰/栗) + ��(繰/栗) . � (繰/栗)
Pour un système composé de n sous système le moment cinétique s’écrit sous la forme suivante :
蘇 �(繰/栗) = ( 型� ��� ʌ � (� ∈ 繰�/栗) + ��(繰�/栗) . � (繰�/栗) )
契�=層
Transformation du moment cinétique de A à un autre B : ぴ B(S/R) = ぴ A (S/R) + mV (G ∈ S/R) ʌ AB 4. Cas particulier :
A est confondue avec G : ぴ A (S/R) = IA (S/R) . Ω (S/R)
A est fixe par rapport à R : ぴ A S/R = IA S/R . Ω S/R
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 71
5. Energie cinétique :
Soit un solide S de masse m, de centre d'inertie G, en mouvement par rapport à un repère R,
A un point lié au solide. Par définition : 継系(鯨/迎) =1
2 (撃 (警/迎))2鯨 穴兼
Pour un solide l’énergie cinétique est égale au produit des deux torseurs cinétique et cinématique :
2. 継系(鯨/迎) = C(S/R) A. ϑ(S/R) A
C(S/R) A : Torseur cinétique ϑ(S/R) A : Torseur cinématique
On aura finalement :
2. EC (S/R) = m. V (G/R). V (A ∈ S/R) + Ω (S/R). ぴ A (S/R)
Pou un système composé de n sous système on a :
EC(S/R) = EC (Si/R)
n
i=1
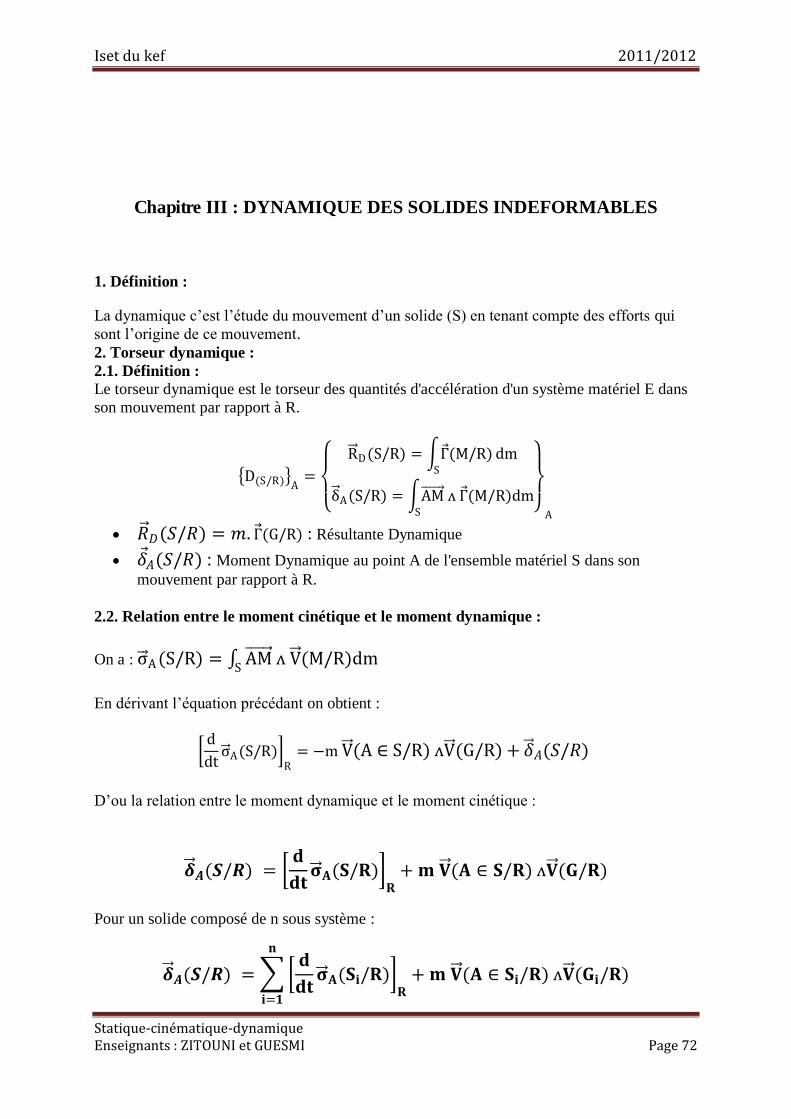
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 72
Chapitre III : DYNAMIQUE DES SOLIDES INDEFORMABLES
1. Définition :
La dynamique c’est l’étude du mouvement d’un solide (S) en tenant compte des efforts qui sont l’origine de ce mouvement. 2. Torseur dynamique : 2.1. Définition : Le torseur dynamique est le torseur des quantités d'accélération d'un système matériel E dans son mouvement par rapport à R.
D(S/R) A=
R D(S/R) = Γ (M/R)S
dmδ A(S/R) = AM ʌ Γ (M/R)dmS
A
迎 経(鯨/迎) = 兼. Γ (G/R) : Résultante Dynamique
絞 畦(鯨/迎) : Moment Dynamique au point A de l'ensemble matériel S dans son mouvement par rapport à R.
2.2. Relation entre le moment cinétique et le moment dynamique :
On a : ぴ A (S/R) = AM ʌ V (M/R)dmS
En dérivant l’équation précédant on obtient : d
dtぴ A(S/R)
R
= −m V (A ∈ S/R) ʌV (G/R) + 絞 畦(鯨/迎)
D’ou la relation entre le moment dynamique et le moment cinétique : 諮 �(傘/三) = ���蘇 �(繰/栗) 栗 + 型 � (� ∈ 繰/栗) ʌ� (�/栗)
Pour un solide composé de n sous système :
諮 �(傘/三) = ���蘇 �(繰�/栗) 栗 + 型 � (� ∈ 繰�/栗) ʌ� (��/栗)
契�=層

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 73
4. Cas particulier :
A est confondue avec G : δ A (S/R) = d
dtぴ A (S/R)
R
A est fixe par rapport à R : ぴ A (S/R) = d
dtぴ A (S/R)
R
5. principe fondamental de la dynamique :
5.1. Définition :
Soit un solide S en mouvement par rapport à un repère R il existe au moins un repère galiléen tel que le torseur dynamique est égal au torseur des efforts extérieurs appliqués à S : D(S/R) A
= τ(E →E) A D(S/R) A
: Torseur dynamique au point A τ(E →E) A : Torseur statique au point A
5.2. Théorèmes généraux :
Le PFD donne naissance à deux théorèmes de dynamique :
Soit D(S/R) A= R D(S/R) = 兼. Γ (G/R)δ A(S/R)
A
et τ(E →E) A= R (E → E)
M A((E → E))
A
L’égalité entre les deux torseurs donne les deux théorèmes suivants :
Théorème de la résultante dynamique :
R D (S/R) = 兼. Γ (G/R) = R (E → E)
Théorème du moment dynamique : δ A (S/R) = M A (E → E)

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 74
Chapitre IV : PUISSANCE ET TRAVAIL
1. Puissance développée par une action mécanique extérieure :
1.1. Définition :
La Puissance développée par une action mécanique extérieure exercée par un solide S2 sur un autre S1 en mouvement par rapport à un repère R est par définition :
P(S2 → S1/R) = f (M). V (M ∈ S1/R)dmM∈S1
Avec 血 (警) : force exercée par un solide S2 sur un autre S1 撃 (警 ∈ 鯨1/迎) : vitesse linéaire de M par rapport à R
En utilisant la relation 撃 (警 ∈ 鯨1/迎) = 撃 (畦 ∈ 鯨1/迎) + Ω (S1/R) ʌ AM on aura la Puissance développée par une action mécanique extérieure est le produit scalaire de deux torseurs ; torseurs des actions mécaniques et celui cinématique au point A.
P(S2 → S1/R) = ϑ(S1/R) A. τ(S1/S2) A
Démonstration :
On a :
P(S2 → S1/R = f M . V M ∈ S1/R = f M . V A ∈ S1/R + Ω S1/R ʌ AM dmM∈S1M∈S1
= f M .M∈S1
V A ∈ S1/R dm + f M . Ω S1/R ʌ AM dmM∈S1
f M . Ω S1/R ʌ AM dmM∈S1
= Ω S1/R . f M . AM dm = M∈S1
Ω S1/R . M A (S2/S1)
f M .M∈S1
V A ∈ S1/R dm = V A ∈ S1/R . f M M∈S1
dm = V A ∈ S1/R . R (S2/S1)
D’ou on aura finalement le résultat: P(S2 → S1/R) = ϑ(S1/R) A= τ(S1/S2) A
Avec : ϑ(S1/R) A= Ω S1/R
V A ∈ S1/R A
: torseur cinématique en A
τ(S1/S2) A= R (S2/S1)
M A(S2/S1)
A
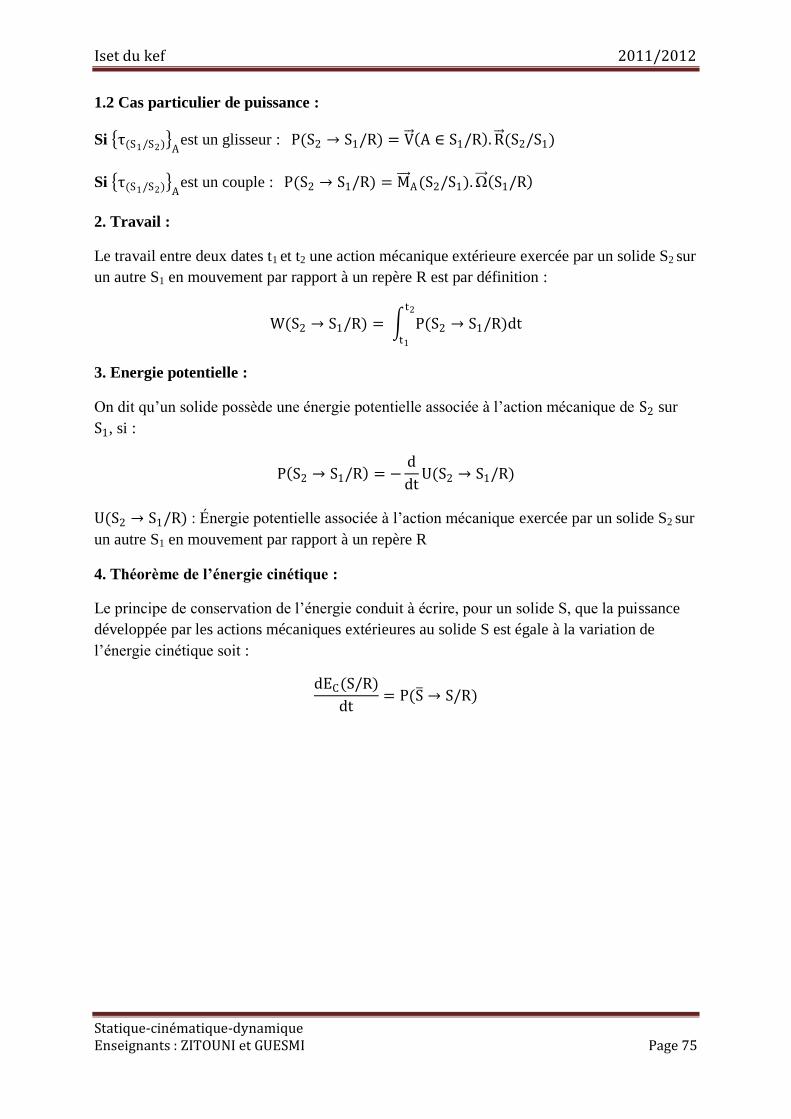
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 75
1.2 Cas particulier de puissance :
Si τ(S1/S2) Aest un glisseur : P(S2 → S1/R) = V A ∈ S1/R . R (S2/S1)
Si τ(S1/S2) Aest un couple : P(S2 → S1/R) = M A(S2/S1). Ω S1/R
2. Travail :
Le travail entre deux dates t1 et t2 une action mécanique extérieure exercée par un solide S2 sur un autre S1 en mouvement par rapport à un repère R est par définition :
W(S2 → S1/R) = P(S2 → S1/R)dtt2
t1
3. Energie potentielle :
On dit qu’un solide possède une énergie potentielle associée à l’action mécanique de S2 sur S1, si :
P S2 → S1/R = − d
dtU(S2 → S1/R)
U(S2 → S1/R) : Énergie potentielle associée à l’action mécanique exercée par un solide S2 sur un autre S1 en mouvement par rapport à un repère R
4. Théorème de l’énergie cinétique :
Le principe de conservation de l’énergie conduit à écrire, pour un solide S, que la puissance développée par les actions mécaniques extérieures au solide S est égale à la variation de l’énergie cinétique soit :
dEC(S/R)
dt= P(S → S/R)

Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 76
PROBLEMES DE CINEMATIQUE-DYNAMIQUE
Problème N°I :
On considère le système matériel suivant (Σ) composé des solides suivants:
(S1) : est un coulisseau de masse m
1, de centre de masse G
1 lié au repère R
1 en mouvement de
translation rectiligne par rapport à un repère fixe 迎0(捲 0, 検 0, 権 0) suivant l’axe 権 0.
(S2) : est une barre uniforme de longueur 2 , de masse m2 , de centre de masse G
2 lié à R
2
(S3) : est un disque homogène de rayon R , de masse m
3 ,de centre de masse G
3 lié à R
3
On donne les tenseurs d’inertie : IG2(S2) = A2 0 0
0 B2 0
0 0 C2
R2
; IG3.(S3) = A3 0 0
0 B3 0
0 0 C3
R3
1. Déterminer les vitesses et les accélérations des points Gi avec i = 1,2,3
2. Calculer les moments cinétiques � 罫件(鯨件/迎0) des (Si) en Gi avec i =1,2,3
3. Calculer les moments dynamiques 絞 罫件(鯨件/迎0) des (Si) en Gi avec i =1,2,3
4. En déduire le moment dynamique 絞 罫1(Σ/迎0) du système au point G1 : exprimé dans R0
5. ωalculer l’énergie cinétique EC(Σ/R du système par rapport à R0.
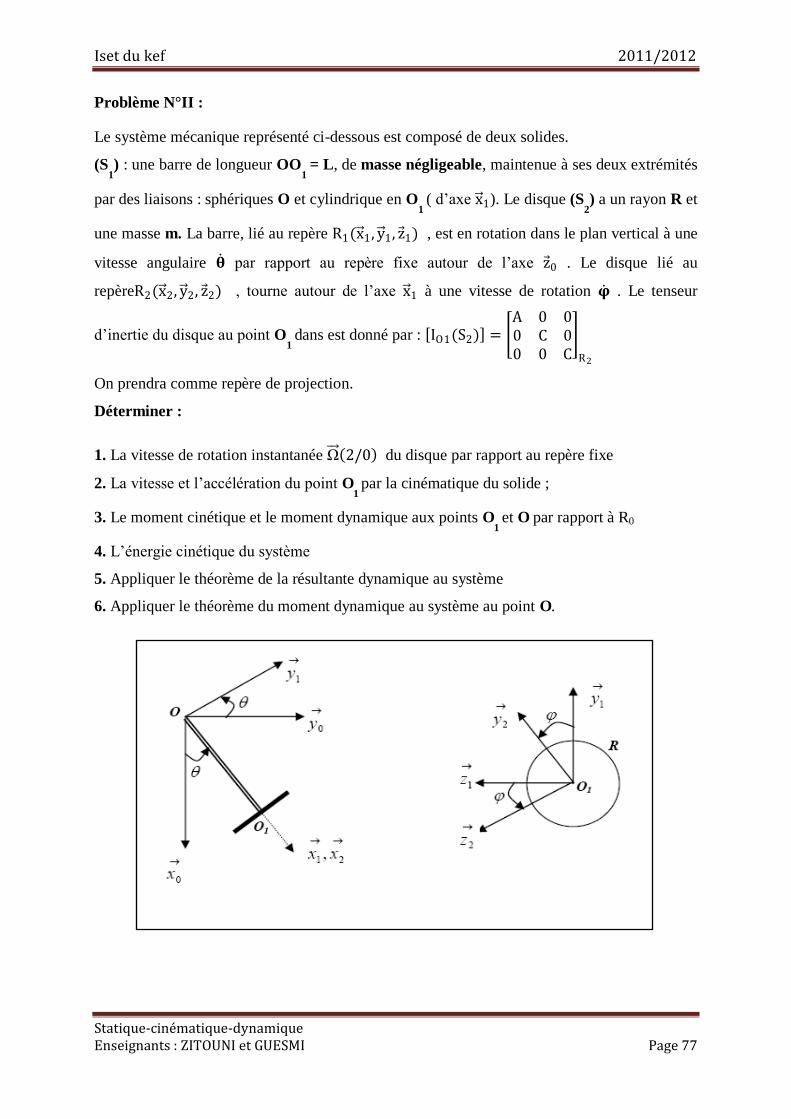
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 77
Problème N°II :
Le système mécanique représenté ci-dessous est composé de deux solides.
(S1) : une barre de longueur OO
1 = L , de masse négligeable, maintenue à ses deux extrémités
par des liaisons : sphériques O et cylindrique en O1 ( d’axe x 1). Le disque (S
2) a un rayon R et
une masse m. La barre, lié au repère R1(x 1, y 1, z 1) , est en rotation dans le plan vertical à une
vitesse angulaire � par rapport au repère fixe autour de l’axe z 0 . Le disque lié au
repèreR2(x 2, y 2, z 2) , tourne autour de l’axe x 1 à une vitesse de rotation � . Le tenseur
d’inertie du disque au point O1 dans est donné par : IO1(S2) = A 0 0
0 C 0
0 0 C
R2
On prendra comme repère de projection.
Déterminer :
1. La vitesse de rotation instantanée Ω 2/0 du disque par rapport au repère fixe
2. La vitesse et l’accélération du point O1 par la cinématique du solide ;
3. Le moment cinétique et le moment dynamique aux points O1 et O par rapport à R0
4. L’énergie cinétique du système
5. Appliquer le théorème de la résultante dynamique au système
6. Appliquer le théorème du moment dynamique au système au point O.
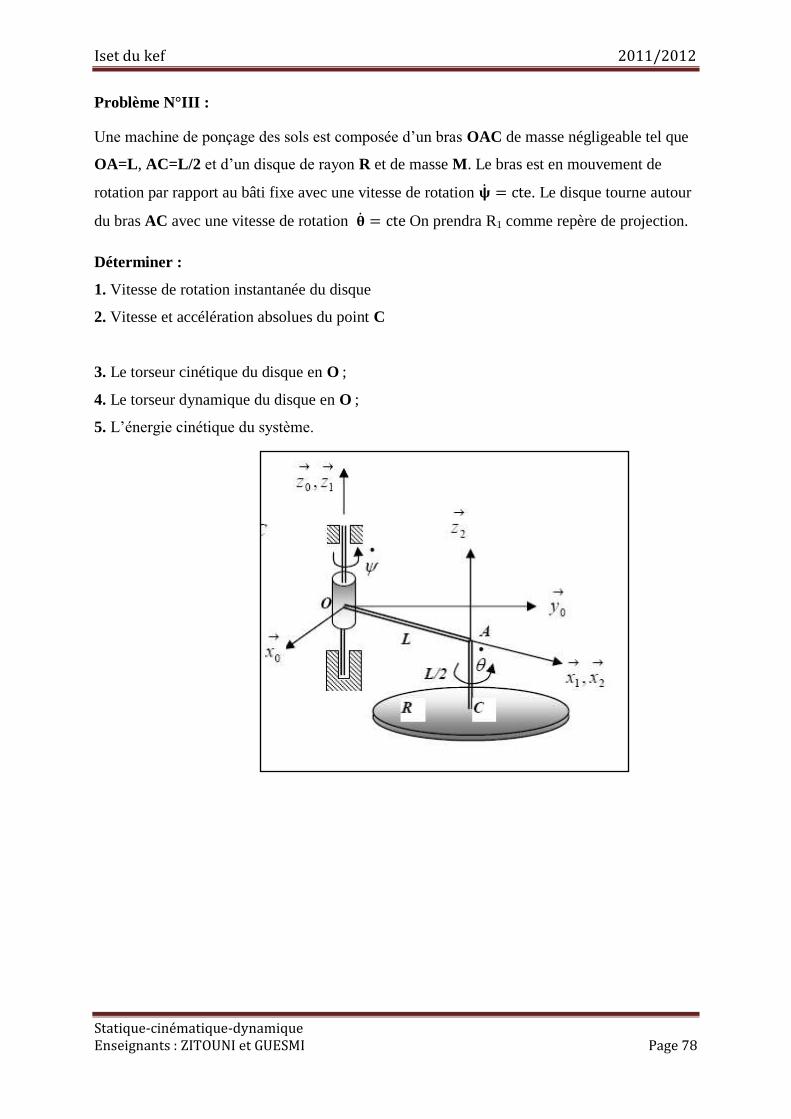
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 78
Problème N°III :
Une machine de ponçage des sols est composée d’un bras OAC de masse négligeable tel que
OA=L , AC=L/2 et d’un disque de rayon R et de masse M . Le bras est en mouvement de
rotation par rapport au bâti fixe avec une vitesse de rotation � = cte. Le disque tourne autour
du bras AC avec une vitesse de rotation � = cte On prendra R1 comme repère de projection.
Déterminer :
1. Vitesse de rotation instantanée du disque
2. Vitesse et accélération absolues du point C
3. Le torseur cinétique du disque en O ;
4. Le torseur dynamique du disque en O ;
5. L’énergie cinétique du système.
Iset du kef 2011/2012
Statique-cinématique-dynamique
Enseignants : ZITOUNI et GUESMI Page 79
BIBLIOGRAPHIE
STATIQUE A.Campa,R.Chappert et R. Picand, MECANIQUE PAR LES PROBLEMES , C.Cortnet, ESSENSIEL DU COURS DE MECANIQUE, Jean-Louis Fanchon, GUIDE DE MECANIQUE , NATHAN.
CINÉMATIQUE MECANIQUE GENERALE Auteur : A. FATNASSI Edition : DAR EL MAAREF 1999 MECANIQUE DES SOLIDES Applications Industrielles Auteur : P. AGATI, Y. BERMONT, G. DELVILLE Edition : DUNOD 1996 GUIDE DE MECANIQUE Sciences et Technologies industrielles Auteur : J. L. FANCHON Edition : NATHAN 1996
DYNAMIQUE MECANIQUE GENERALE Auteur : A. FATNASSI Edition : DAR EL MAAREF 1999 MECANIQUE DES SOLIDES Applications Industrielles Auteur : P. AGATY, Y. BERMONT, G. DELVILLE Edition : DUNOD 1996 GUIDE DE MECANIQUE Sciences et Technologies industrielles Auteur : J. L. FANCHON Edition : NATHAN 1996







![La steppe algérienne dans le contexte du changements … DOCTORAT/BOUBAKEUR-GUESMI-Doctorat.pdf · (CV), trend test, test of correlation, and homogeneity test]. The discussion and](https://img.pdfslide.fr/doc/110x75/5f03d5e97e708231d40b007f/la-steppe-algrienne-dans-le-contexte-du-changements-doctoratboubakeur-guesmi-doctoratpdf.jpg)