-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
1/21
1Bruno FRANCOISBruno FRANCOIS
Equipements lectriques 2
Modlisation des machines lectriques
en rgime transitoire
Introduction la commande vectorielle
Plan
1 Rappels et Principe du contrle vectoriel,
2 Machine Synchrone
3 Machine Asynchrone
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
2/21
3
1Introduction
Rappels
Daprs une prsentation de Xavier KESTELYN
quipement lectrique
2eme anne4
Modle en rgime permanent Modle en rgime transitoire
Pour contrler la vitesse, quelle est la grandeur dun moteur quil
faut trecapable de contrler ?
Fondamentaux :
Moteur Charge
)t(Cdt
)t(dJ ouple=
Pour contrler la vitesse ou la position instantane de
lensemble,il faut tre capable de
matriser le couple instantan fourni par le moteur
dt)t(d)t( =
)t(C)t(C)t(C)t(C frottementeargchmoteurouple =
quation fondamentale de la dynamique :
Bilan des couples :
f
5
Modle en rgime permanent Modle en rgime transitoire
Rgime permanent = grandeurs stationnaires tensions et courants
sinusodaux et quilibrs de frquence constante vitesse de rotation et
couple rsistant constant
Modle simple et en pratique valable pour des grandeurs lentement
variables
Rgime transitoire = grandeurs volution temporelle
quelconqueModle valable en permanence mais plus complexe
On ne contrle bien que ce que lon connat bien.
A partir des quations physiques ou de lobservation du
fonctionnement dunsystme,on tablit un modle qui peut tre plus ou
moins complexe.
On peut donc dcider de modliser le systme en :
Fondamentaux :
6
Modle en rgime permanent Modle en rgime transitoire
Exemples dapplication :
Commande en U/f = constanteAlgorithme de commande bas sur le
modle en rgime permanent :seule la valeur du couple en rgime
permanent est contrle
Prix intressant, mise en oeuvre simple mais performances
dynamiques
limites :
(Applications : pompes, ventilateurs, )
Commande vectorielleAlgorithme de commande bas sur le modle en
rgime transitoire :la valeur du couple instantan est contrle
Prix plus lev mais performances dynamiques accrues
(Applications : couple l arrt ncessaire, dplacements rapides,
)
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
3/21
7
Modle en rgime permanent Modle en rgime transitoire
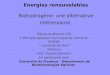
Rponse un mme chelon de couple des deux types de commande :
Commande U/f Commande vectorielle
Si les deux commandes permettent dobtenir les mmes valeurs en
rgime permanent,seule la commande vectorielle permet dimposer le
couple requis
durant les rgimes transitoires
Rfrence dsire pour le couple
volution relle du couple
8
Reprsentation vectorielle des champs magntiques
Une bobine alimente en courant variable
Une bobine alimente en courant sinusodal
Animations ralises par Claude Divoux
:http://www.physique-appliquee.net/phyapp/champ_tournant/champ_frames.htm
9
Reprsentation vectorielle des champs magntiquesDeux bobines
alimentesen courant continu
Trois bobines alimentespar des courants sinusodaux quilibrs
Animations ralises par Claude Divoux
:http://www.physique-appliquee.net/phyapp/champ_tournant/c
hamp_frames.htm10
Reprsentation vectorielle des champs magntiquesPrincipe de la
Machine synchrone
Principe de la machine asynchrone
Animations ralises par Claude Divoux
:http://www.physique-appliquee.net/phyapp/champ_tournant/champ_frames.htm
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
4/21
11
Contrle Vectoriel du Flux ???
Couple lectromagntique instantan :
ss
ff
+ C
C = k ff ssC = k ff ss sin (k dpend de la gomtrie du systme)
Contrle du couple instantan
=
Contrle des VECTEURS Flux
=
COMMANDE VECTORIELLE
12
3Machine Synchrone
quipement lectrique
2eme anneDaprs une prsentation de Xavier KESTELYN
13
Principe physique
Principe de la Machine synchrone
Le rotor peut tre ralis partir :
_ dun aimant ou
_ dune bobine (lectroaimant, electromagntique)14
Ralisation dun rotor bobin
Bobine mobile alimente
par un courant continu(Inducteur)
Balais
Stator triphas
o circulenttrois courants sinusodaux
Ralisation du champmagntique tournant
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
5/21
15
Machine synchrone :Constitution de la machine
16
Machine synchrone : 3 bobines fixes dcales de 120et et 1 bobine
mobile en courant continu
1,2,3 :Enroulements statoriques fixescoupls en toileAlimentation
variable
F :Enroulement rotoriquemobile (Excitation Field)Alimentation
continue
3
2 3
1
2
x
d
q
1
2
3
y
1
F
v1
i1vF
iF
i2
v2
i3
v3
y
xN
S
z
17
cosMMF=1
Machine synchrone :
Expression du flux dans une bobine dune stator
FFSSS ItMtiMtiMtiLt )()()()()( 13211 +++=
1
2
3
y
F
v1
i1vF
iF
i2
v2
i3
v3
x
z18
Machine synchrone :
F
F
F
F
SSS
SSS
SSS
I
M
M
M
i
i
i
LMM
MLM
MML
+
=
3
2
1
3
2
1
3
2
1
=
=
=
3
4cos
3
2cos
cos
3
2
1
MM
MM
MM
F
F
F
Notation matricielle ( vectorielle ) : Stator
Avec :
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
6/21
19
Machine synchrone :
( )
+=3
2
1
321
ii
i
MMMIL FFFFFF
Notation matricielle ( vectorielle ) : Rotor
==
==
==
3
4cos
32cos
cos
33
22
11
MMM
MMM
MMM
FF
FF
FF
20
dt
I.Md
dt
di.M
dt
di.M
dt
di.Li.R
dt
di.Rv FFsss
)( 13211
111 ++++=+=
213 iii =
( ) ( )dt
I.Md
dt
di.MM
dt
di.MLi.Rv FFssss
)( 12111 +++=
dt
I.Md
dt
di.Li.Rv FFc
)( 1111 ++=
dt
dI
.MI.dt
d
.d
dM
dt
I.Md
)i(ve
F
FF
FFF
1
11
111
)(
0 +====
En convention rcepteur la tension sur la phase a s'crit:
En supposant que les courants sont quilibrs (neutre non reli)
:
L'quation prcdente devient:
A vide )0( 1=i , on obtient
FF I..p.
d
dMe
11=
11
11 edt
di.Li.Rv c ++=La tension aux bornes de la phase a s'crit :
Expression des tensions ( au stator !!! )
21
22
22 edt
di.Li.Rv c ++=
33
33 edt
di.Li.Rv c ++=
Sur les deux autres phases
FF i..p.
d
dMe
33=
FF i..p.
d
dMe
22=
22
332211 ... ieieiepe ++=La puissance lectromagntique instantane
s'crit:
En remplaant les fem par leurs expressions en fonction des flux,
onobtient:
++
==332211 ...
)(
ieieiep
tc e
em
Celle ci est transforme en puissance mcanique, d'o le
couplelectromagntique
Expression du couple instantan
Couple lectromagntique instantan (p=1) :
[ ])/tsin(ti)/tsin(titsintiMItc Fem 34)()(32)()()()()( 321
++=
Fem Ipd
pidCosi
d
pidCosi
d
dCosiMtc ..
)3/4(.
)3/2(.
)(..)( 321
+
+=
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
7/21
23
Il faut donc autopiloterlangle lectrique S(t) par rapport langle
mcanique(t) pour que le couple moyen ne soit pas nul.Le couple est
constant et max pour S(t) =(t)
On alimente les trois enroulements du stator avec trois courants
sinusodaux defrquence fet quilibrs :
)3/4.2sin()()3/2.2sin()().2sin()( max3max2max1 ===
tfItitfItitfIti
( ))()(cos2
3)( max ttIMItc SFem =Alors :
ANNEXE: Expression du couple en rgime permanent
)3/4)(sin()()3/2)(sin()())(sin()( max3max2max1 === tItitItitIti
SSS
tftS 2)( =On dfinit langle lectrique (au stator) :
24
Rgime permanent (couple choisi maximum) :
effFF IMIIMIC 22
3
2
3max ==
=
.
13
pIEC eff
vide
eff
Remarque : vide (i=0)
)()( ttS =
sin2 videeffE=( )
sin....cos...... 11 MIp
d
MdIpd
dMIpe FFF
F ===
= .2
.p
IME Fvideeff
La valeur efficace du courant vient du schma monophas
quivalent.
Ieff
Veff
RSLCS=LS-MS
Eeff Inductance cyclique statorique effeffIEC 3=
ANNEXE: Expression du couple en rgime permanent
25 26
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
8/21
27
)t(Cdt
)t(dJ ouple=
)t(C)t(C)t(C)t(C frottementeargchmoteurouple =
f
Rappel de lobjectif
On veut imposer la vitesse une valeur de rfrence, comment faire
?
Pour contrler la vitesse, il faut contrler le couple instantan.
Cela :_ ncessite le contrle instantan des courants triphass,_ dpend
de la position instantane du rotor
[ ])3/4)(sin()()3/2)(sin()()(sin)()( 321 ++= ttittittiMItc
Fem
CONCLUSION :En ltat, d la complexit du modle de la machine,il
est difficile de contrler le couple instantan de la machine
synchroneen rgime quelconque
28
Le contrle du couple est difficile car le flux dune phase dpend
descourants de chacune des trois phases.
SOLUTION : dplacer le problme en un autre plus simple
=UTILISER une TRANSFORMATION
Au lieu de contrler les courants de la machine relle, on
prfrecontrler les courants dune machine fictive quivalente.
IDEE :La machine couple en toile perd un degr de libert (car
i
1+i
2+i
3=0)
donc la machine triphase couple en toile est quivalente
unemachine diphase (2 phases)
Mise en quation dans le repre diphas orthogonal
29
Bss
jq
d
Bff
usact
s*
Bss, champ magntique tournant cr par les trois bobines du
statorBff, champ magntique tournant cr par la bobine du rotor
Cest la course !Angle quelconque entre les deux champs
Mise en quation dans le repre diphas orthogonal
30
1
2
2
3
v1
i1
i2
v2
i3
v3
1
v
i
i
v
d
q
F
v
ivF
iF
i
v
Le systme est dcoupl etil est donc plus facile de rgler le
couple instantan de la machine
Les axes et sont perpendiculaires eton considre 2 enroulements
virtuels perpendiculaires.Les flux de chaque enroulement sont
perpendiculaires aussi !Il n y a plus dinteractions et donc les
inductances mutuelles sont nulles :
dpend uniquement de i qui dpend de v dpend uniquement de i qui
dpend de v
Mise en quation dans le repre diphas orthogonal
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
9/21
31
O
x
Osb
xa
xb
Osc
Osa
sccsbbsaa OxOxOxKxvvv
r
++=
Os
Os
x
x
O
x
Grandeurs triphases lorigine
dun vecteur (tournant si sinusodal)
ss OxOxxvv
r
+=
Grandeurs diphases lorigine
dun vecteur (tournant si sinusodal)
Repre triphas Repre diphas orthogonal
3
2=K (pour conserver la puissance )
32
= 321 21
2
1
3
2iiii
= 32 2
3
2
3
3
2iii
Application aux courants :
)
sin()
sin(sin(0)
)
cos()
cos(cos(0)
3
2
3
4
3
23
4
3
2
=
c
b
a
x
x
x
x
x
2
3
2
30
2
1
2
11
3
2
=
c
b
a
x
x
x
x
x
[ ] [ ] [ ]XCX ,, 0 =
( )cba xxxx
3
1
0 ++=
[ ]
=
2
1
2
1
2
1
2
3
2
30
2
1
2
11
3
2C
Expression de la transforme de Concordia :
Gnralisation :
33
Machine synchrone : TRANSFORMATION de CONCORDIA
En effectuant le changement de variables OU changement de base,
on obtient :
=
3
2
1
3
2
1
i
i
i
LMM
MLM
MML
SSS
SSS
SSS
=
0
1
0
1 ].[][
i
i
i
.C
LMM
MLM
MML
.C
SSS
SSS
SSS
=
0
1
0
].[].[
i
i
i
.C
LMM
MLM
MML
C
SSS
SSS
SSS
( )
( )
+
=
tsin
tcosMI
i
i
ML
MLF
SS
SS
2
3
0
0
En ne considrant que le stator :
34
Machine synchrone : TRANSFORMATION de CONCORDIA
0 2 4 6 8 10 12-1.5
-1
-0.5
0
0.5
1
1.5
iA iBiC
i iTrac des courantsen rgime permanentPour Imax= 1A
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
10/21
35
Expression du couple instantan
++= )sin(ti)sin(tisintiMItc Fem 34
)(3
2)()()( 321
et : )(3
2)(1 titi =
+=
2
)(
2
)(
3
2)(2
tititi
=
2
)(
2
)(
3
2)(3
tititi
do :
( ))().()().(2
3)( tcostitsintiI.M.tc Fem =
Rappel de lobjectifPour contrler la vitesse, il faut contrler le
couple instantan. Cela :_ ncessite le contrle instantan des deux
courants sinusodaux,
_ dpend de la position instantane du rotor
CONCLUSION :En ltat, d la complexit du modle de la machine,il
est encore difficile de contrler le couple instantan de la machine
synchroneen rgime quelconque 36
)/sin(Iti)/sin(ItisinIti maxmaxmax 34)(32)()( 321 ===
d o :
sinItitititi max2
3)(
2
1)(
2
1)(
3
2)( 321 =
=
cosItititi max2
3)(
2
3)(
2
3
3
2)( 32 =
=
maxFIMIC 2
3=
Rgime permanent (couple max) :
ANNEXE: Expression du couple en rgime permanent
37
y
F
v
ivF
iF
i
v
x
Machine synchrone : TRANSFORMATION de CONCORDIA
BSSBFF
Diagramme vectoriel :Rgime permanent(couple max)
38
Mme si le problme de dpart est simplifi, il faut encorecontrler
deux courantsqui mme en rgime permanent restent sinusodaux.
SOLUTION :Dplacer le problme en un autre encore (!!!) plus
simple=
UTILISER une deuxime TRANSFORMATION
IDEE :Si je me dplace la mme vitesse quun objet mobile, il me
parat tre fixe.
Mise en quation dans le repre diphas orthogonal tournant
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
11/21
39
Machine synchrone : TRANSFORMATION de PARKRotation dangle :La
machine diphase enroulements fixes est quivalente une autre machine
diphasedont les enroulements tourneraient la mme vitesse que le
rotor
A la condition :)().()().( tsintitcostiid += )().()().(
tcostitsintiiq +=
F
v
ivF
iF
i
v
d
q
q
F
vF
iF
iq
vq
did
vd
Repre (o, ) fixe Repre (o,d,q) tournant
40
[ ] [ ]oPdqo XRX )(=
[ ]
=
100
0
0
( )cos()sin(
)sin()cos(
)RP
(t) est langle du repre tournant etest quelconque a priori.
Relation gnraledune matrice de rotation
[ ][ ]abco XCX =
[ ]
=
2
1
2
1
2
1
23
230
2
1
2
11
32C
Matrice de Concordia :
Transforme de Park :
[ ] [ ] [ ]abcdqo X)(PX =
[ ] [ ][ ]
( )
( )
=
2
1
2
1
2
13
4sin
3
2sinsin
3
4cos
3
2coscos
3
2=
C)(R)(P P
41
En effectuant une rotation (t) = (t) pour immobiliser les
grandeurs, on obtient :
=
3
2
1
3
2
1
i
i
i
LMM
MLM
MML
SSS
SSS
SSS
=
0
1
0
1 )](.[)]([
i
i
i
.P
LMM
MLM
MML
.P qd
SSS
SSS
SSS
q
d
=
0
1
0
)](.[)].([
i
i
i
.P
LMM
MLM
MML
P q
d
SSS
SSS
SSS
q
d
En ne considrant que le stator:
+
=
0
1
2
30
0F
q
d
SS
SS
q
dMI
i
i
ML
ML
constant !
42
Machine synchrone : TRANSFORMATION de PARK
Expression du couple instantan :
et :
qFem iMItc 2
3)( =
( ))().()().(2
3)( tcostitsintiMItc Fem =
)()()( tsin.itcos.iti qd = )()()( tcos.itsin.iti qd +=
Le couple instantan se rgle uniquement par iq (et IF) etpour
obtenir un couple constant, il faut que iqsoit constant (id=0)
do :
Le couple instantan ne dpend plus de la position du rotor !(mais
on est dans un repre qui tourne avec le rotor)
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
12/21
43
Machine synchrone : TRANSFORMATION de PARK
La transformation de Park applique la machine synchronepermet de
montrer lquivalence entre une machine synchrone etune machine
courant continu.
Dailleurs, la machine synchrone est souvent appele :
DC Brushless Machine (Machine courant continu sans balais)ou
MCC collecteur lectronique
44
Comparaisons
=
0
0
1
3
0
I
i
i
i
q
d
1.2 1.205 1.21 1.215 1.22 1.225 1.23 1.235 1.24 1.245-15-10
-505
1015
1.2 1.205 1.21 1.215 1.22 1.225 1.23 1.235 1.24 1.245-15-10
-505
1015
t(s)
ib(A) ic(A)
i(A) i(A)
ia(A)
t(s)
[ ]
( )
=
=
3
4
3
2
sin
sin
sin
2
t
t
t
I
i
i
i
I
c
b
a
[ ] [ ]
=
=
=
02
sin
sin
23
2
0
0 )t(
)t(
I
i
i
i
C
i
i
i
I
c
b
a
45
d
q
q
F
vF
iF
iq
vq
did
vd
Machine synchrone : RESUME
Choisir une rotation dun angle revient caler laxe d sur le flux
rotorique
=
COMMANDE FLUX ROTORIQUE ORIENTE
BSS
BFF
46
Machine synchrone : RESUME
Pour contrler plus facilement le couple instantane de la
machinesynchrone, on ralise une transformation de Park.Dans ce cas,
la machine synchrone se commande comme une MCC.
Concordia-1 Rotation-1
Park-1
F
v
ivF
iF
i
v
d
q
q
F
vF
iF
iq
vq
did
vd1
2
2
3
F
v1
i1vF
iF
i2
v2
i3
v3
1
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
13/21
47
Machine synchrone : RESUME
vA
vB
vC
iA
iB
iC
vd
vq
PARK
iq
mesure
iA
iB
iC
id0
Park inverse
Park
Modle de la machine dans le repre de Park tournant-> ncessit
de mesurer la position avec un codeur 48
Machine synchrone : Synoptique de commande
vd
vq
iq
mesures
iA
iB
iC
id
Onduleurde
tension
PARK -1
vA
vB
vC
PARK
+- PID
PID+-
0
+- PIDref
49 50
BIBLIOGRAPHIE
Electrotechnique industrielle.G.Sguier Editions Tech et doc
Introduction la commande vectorielle desmachines
asynchrones.Patrick Brunet
Cours machines asynchrones. *Alain Cunire. Gilles Feld.
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
14/21
51
AnnexeApplication une machine diphase
alternativeExemple didactique
quipement lectrique
2eme anneDaprs une prsentation de Xavier KESTELYN 52
Exemple 1 : Deux bobines : 1 fixe 1 mobile
Modlisation :
A = AA + AF = LA iA+ MAF iFF =FF + FA = LF iF+ MFA iA
LA , LF : inductance propre (constante)MAF = MFA = M cos :
inductance mutuelle dpendant de la position durotor
A : enroulement fixeF : enroulement mobile
Lenroulement A peroit son champ
magntique propre (cr lorigine par lecourant i
A) et le champ magntique issu
de lautre enroulement
Expression des flux :
53
Deux bobines : 1 fixe 1 mobile
dt
dMi
dt
diM
dt
dLi
dt
diLirv AFF
FAF
AA
AAAAA ++++=
)( FAFAAAAA
AAA iMiLdt
dir
dt
dirv ++=
+=
dt
dMi
dt
diM
dt
diLirv AFF
FAF
AAAAA +++=
Equation en tension (stator) :
rA
, rF
: rsistance (constante)
carLA est constante,MAF() et (t) si le rotor tourne !
54
Deux bobines : 1 fixe 1 mobile
dt
dMi
dt
diM
dt
dLi
dt
diLirv FAA
AFA
FF
FFFFF ++++=
)( AFAFFFFF
FFF iMiLdt
dir
dt
dirv ++=
+=
dt
dMi
dt
diM
dt
diLirv FAA
AFA
FFFFF +++=
Equation en tension (rotor) :
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
15/21
55
Deux bobines : 1 fixe 1 mobile
Bilan de puissance
mcmagje pppp ++=
dt
dM
iiidt
di
Mdt
di
Lidt
di
Mdt
di
L
pp
)FA(AF
FAF
A
FA
F
FA
F
AF
A
A
mcmag
=
+
++
+
=+
2
FF
FFAA
AAFFAAe idt
diri
dt
dirivivp
+++=+= 22
56
Deux bobines : 1 fixe 1 mobile
Bilan de puissance
Dans cette expression, on identifie la puissance mcanique :
=
=
dt
dMiip
FAAF
FAmc
)(
22
1
Dune manire gnrale, on retiendra que la puissance mcanique
estproportionnelle au :
produit des courants (partie fixe partie mobile) la drive des
inductances (on ne tiendra donc compte que desinductances qui varie
avec la position)
57
Deux bobines : 1 fixe 1 mobile
Bilan de puissance :
sinM
dt
dii
d
)cosM(d
dt
dii FAFA ==
sinFAem iMic =
Remarque 2 : Il nexiste pas de combinaison (iA, iF)
permettantdobtenir un couple constant quelque soit langle
Remarque 1 : Le couple est maximum pour =90
dt
dMii
dt
dc
cp
)FA(AFFAem
emmc
===
=
58
Deux bobines : 1 fixe 1 mobile
Remarque 3 : Lexpression du couple permet bien de retrouver
:
sinAAFF
AAFF
k
kc
=
=
( )MLL
Mk
FA
==
12Avec :
Coefficient de dispersion entreles enroulements A et FFALL
M21=
AAAA
FFFF
iL
iL
=
=AA
FF
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
16/21
1
3Machine Asynchrone
(induction machine)
2
Dplacement dun aimant devant une bobine
La loi de Faraday (et de Lenz) explique
quen cas de variation du flux magntique
lintrieur de ce circuit,
une force contre lectromotrice est induite (gnre):
dt
de =
Rappel sur lauto-induction
Si la bobine a une rsistance Ret est alimente sous une tension
v:
i
e
v
R
Si la bobine est linaire Li=
e est gnre et additionne v
3
Dplacement d un aimant
Bl
vitesse : v
fii
2i2
aimant
devant un rail en court circuit
Comme chaque conducteur est court-circuit, un courant i se met
circulerdans le
conducteur qui est momentanment en dessous du champ magntique
(ou de laimant).
Comme ce courant traverse le champ magntique, daprs la loi de
Laplace, une force
mcanique est applique sur ce conducteur.
BlIFrrr
dd =
Daprs la loi de Faraday, une tension est induite dans chaque
conducteur coup par
le champ magntique.
4
Cette force entrane le conducteur dans le sens du dplacement du
champ magntique.
Si ces conducteurs sont mobiles ces derniers acclrent. A mesure
quils atteignent de
la vitesse, la vitesse laquelle le champ magntique est coup par
ces conducteurs
ralentit. La variation du flux diminue et la tension induite
diminue, de mme que le
courant i.
Cet effet de la loi de Lenz (Leffet soppose la cause qui lui a
donn naissance) a pour
consquence de diminuer la force de Laplace.
Ainsi si les conducteurs se dplaaient la mme vitesse que le
champ magntique, la
tension induite, le courant iet la force sannuleraient.
La vitesse du rotor est donc lgrement infrieure la vitesse du
champ
magntique.
Dplacement d un aimant devant un rail en court circuit
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
17/21
5
Machine asynchrone :
3 bobines fixes dcales de 120
et 3 bobines mobiles dcales de 120
sa,sb,sc :
Enroulements statoriques fixes
coupls en toile
Alimentation variable
ra,rb,rc :
Enroulements rotoriques mobiles
Court-circuits
Alimentation induite par les
enroulements statoriques
O
Osb
OscOsa
Orb
Orc
Ora
irb
isb
isc
isa
vsb
vsc
vsa
vrb
vrcirc
iravra
6
Tensions statoriques (notation matricielle)
+
=
sc
sb
sa
sc
sb
sa
S
S
S
sc
sb
sa
dt
d
i
i
i
R
R
R
v
v
v
00
00
00
Tensions rotoriques (notation matricielle)
+
=
rc
rb
ra
rc
rb
ra
R
R
R
rc
rb
ra
dt
d
ii
i
RR
R
vv
v
0000
00
=
00
0
rc
rb
ra
vv
v
Si rotor en CC
stator
d
d
s
s s sV R I
t
=
rotor
d
d
r
r r rV R I
t
=
dans le repre triphas du stator
dans le repre triphas du rotor
7
Flux statorique dans un enroulement statorique
Influence des enroulements du rotor
sur les enroulements du stator
Influence des autres
enroulements du stator
O
Osb
OscOsa
Orb
Orc
Ora
irb
isb
isc
isa
vsb
vsc
vsa
vrb
vrcirc
iravra
( )
++
+++++=
3
4cos
3
2coscos
rcrbrasrscssbssassa iiiMiMiMil
8
[ ] [ ]( )sa s s s sa ra
s sb s s s sb sr rb
sc s s s sc rcstator
l M M i i
= = M l M i + M R i
M M l i i
[ ]
4 2cos( ) cos( ) cos( )3 3
2 4( ) = cos( ) cos( ) cos( )
3 3
4 2cos( ) cos( ) cos( )
3 3
R
Flux statorique (notation matricielle)
( ) ( )cos , cossr sa ra srM O O M =r r
( ) 2 4.cos , .cos .cos3 3
sr sa rb sr srM O O M M
= = +
r r
( )4 2
cos , cos cos3 3
sr sa rc sr srM O O M M
= = +
r r
Remarque
H th
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
18/21
9
Hypothse :
Les courants sont quilibrs -> isc=-isa-isb
[ ] [ ]
0 0
0 0 ( )
0 0
sa s sa ra
s sb s sb sr rb
sc s sc rcstator
L i i
= = L i + M R i
L i i
3
2s s s sp sL l M l l= = +
( ) ( )
++
+++=
3
4cos
3
2coscos
rcrbrasrsasssa iiiMiMl
avec
10
Flux rotorique (notation matricielle)
[ ] [ ]
0 0
= 0 0 + ( )
0 0
ra r ra sa
T
r rb r rb sr sb
rc r rc scrotor
L i i
= L i M R i
L i i
11
[ ][ ]
[ ] ( )[ ]( )[ ] [ ]
[ ][ ]
r
s
rsr
srs
r
s
I
I
LM
ML=
T
[ ] L
L
L
=L
s
s
s
s
00
00
00
[ ] L
L
L
=L
r
r
r
r
00
00
00
( )[ ] ( )[ ] R=MM srsr
,
,
Expression gnrale des flux rotoriques (notation matricielle)
dans le repre triphas du stator
dans le repre triphas du rotor
Problme: On a deux modles dans deux repres tripass duffrents
12
Rgime transitoire :
Comme pour la machine synchrone, on cherche simplifier le modle
de la
machine.
Tout dabord, il faut utiliser un seul repre pour toutes les
quations
On va utiliser la transformation de Park
Modlisation dans un repre tournant de Park
Grandeurs statoriques :
T f d P k l d d t t
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
19/21
13
Grandeurs statoriques :
Comme pour la machine synchrone (le stator tant identique),
on applique aux grandeurs statoriques une transformation de
Park
dangle S
(t)
Grandeurs rotoriques :
Pour se ramener dans ce repre de Park, on applique aux
grandeursrotoriques une transformation de Park dangle R (t) = S(t)
- (t)
O rs
Osa
Osb
OscOra
Orb
Orc
Od
Oq
14
( )[ ] [ ]( )[ ] [ ] [ ] ( )[ ] [ ]0
1
0
10
1
dt
ddq_sssdq_ss
dq_ssIPRVP
P
=
stator
d
d
s
s s sV R I
t
=
Rotation dun angle s
dans le repre de Park
=
=
+=
000
d
d
d
d
d
d
ssss
sdssqssq
sq
sqssdssd
sd
iRvt
iRvt
iRvt
Tous calculs faits, on obtient :
O rs
Osa
Osb
OscOra
Orb
Orc
Od
Oq
Transforme de Park sur les grandeurs du stator
15
Tous calculs faits on obtient :
Rotation dun angle rdans
le mme repre de Park
=
=
+=
000
d
d
d
d
d
d
rrrr
rdrrqrrq
rq
rqrrdrrdrd
iRvt
iRvt
iRvt
O rs
Osa
Osb
OscOra
Orb
Orc
Od
Oq
Transforme de Park sur les grandeurs du rotor
rotor
d
d
r
r r rV R I
t
=
( )[ ] [ ]dt
d 0_1
=
dqrrP
16
[ ][ ]
[ ] ( )[ ]( )[ ] [ ]
[ ][ ]
r
s
rsr
srs
r
s
I
I
LM
ML=
T
( )[ ] [ ]
( )[ ] [ ]
[ ] ( )[ ]
( )[ ] [ ]
( )[ ] [ ]
( )[ ] [ ]
0
1
0
1
0
1
0
1
.
dq_rr
dq_ss
rsr
srs
dq_rr
dq_ss
IP
IP
LM
ML=
P
P
[ ][ ]
[ ] [ ][ ] [ ]
[ ][ ]
0
0
0
0
dq_r
dq_s
prT
psr
psrps
dq_r
dq_s
I
I
LM
ML=
Tous calculs faits on obtient :
[ ]
=
000
00
00
s
s
s
ps
L
L
L
L [ ]
=
000
00
00
r
r
r
pr
L
L
L
L [ ] [ ]rsrpsr RMM2
3= [ ]
=
000
010
001
Rr
Transforme de Park sur les flux
Machine asynchrone : calcul du couple
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
20/21
17
En rsum :
Mme si ces quations paraissent lourdes, elles sont bien plus
simplesque celles crites au dbut de ltude !!!
RqSqsSq
RdSdsSd
i.MiL
i.MiL
+=
+=
dt
diRv
dt
diRv
Sq
SdSSqSSq
SqSSd
SdSSd
++=
+=
SqRqrRq
SdRdrRd
i.MiL
i.MiL
+=
+=
0
0
=++=
=+=
dt
diRv
dt
diRv
RqRdrRqRRq
RqrRd
RdRRd
srMM2
3=
18
Machine asynchrone : calcul du coupleOn peut maintenant pour un
rgime quelconque, calculer le couple
instantan en faisant un bilan de puissance :
sdrqsqrd iiiiMc =
On obtient :
( )rqsdrdsq
r
iiL
Mpc =
)sqsdsdsq iipc =
19
( )rdsqr
iL
Mpc = sdsqpic =
Commande flux rotorique orient
sur laxe direct rq=0
sur laxe en quadrature rd=0
( )rqsdr
iL
Mpc =
Commande flux statorique orient
sur laxe direct sq=0
sur laxe en quadraturesd=0
sqsdpic =
( )rqsdrdsqr
iiL
Mpc = ( )sqsdsdsq iipc =
Expression avec les flux rotoriques Expression avec les flux
statoriques
Machine asynchrone : commande vectorielle
Stratgies de commande par orientation du flux
4 ides pour simplifier lexpression du couple
Si on aligne le repre de Park avec un des deux flux, on annule
une
composante
20
d
1
q
2
3
y
v1
i1
i2
v2
i3
v3
x
a
r
b
c
Machine asynchrone : commande vectorielle
R
Rq=0, le couple devient :
On montre (et on voit) que :
S
cne dpend que de iSqsi
Rest maintenu constant
R ( )rdsqr iLM
pc =
Stratgie la plus utilise : Orientation flux rotorique orient sur
laxe direct
-
8/12/2019 ITEEM 2 Equi2 01 Machine Alternative
21/21
21
d
1
q
2
3
y
v1
i1
i2
v2
i3
v3
x
a
r
b
c
Machine asynchrone : commande vectorielle
En rgime permanent :
SS
On constate que (par rapport la
machine synchrone) le flux statorique
ne peut plus tre perpendiculaire au
flux rotorique.
En effet, il ny a quune source
dalimentation pour :
Magntiser la machine (comme le fait
lenroulement inducteur dune MS) par
la composante de laxe d
Produire du couple par la composante
de laxe q
RR
R
S
R
22
Machine asynchrone : Synoptique de commande
23
BILAN :
Machine synchrone + variateur :
Commande performante plus aise car la machine est magntise
par le rotor. Il ne faut contrler que le couple
Rapport puissance/masse lev
Machine au prix plus lev (aimants ou bobinage rotorique +
bagues
collectrices)
Machine asynchrone + variateur :
Commande performante plus exigeante car il faut magntiser et
contrler le couple en mme temps et de faon indpendante
Rapport puissance/masse moins lev - ventilation plus
importante
Machine au prix le plus bas du march
Possibilit d utiliser des commandes moins performantes
Il n y a pas de bon choix. Tout dpend de l application envisage
et
des performances attendues.
24
BIBLIOGRAPHIE
Electrotechnique industrielle.
G.Sguier Editions Tech et doc
Introduction la commande vectorielle des
machines asynchrones.
Patrick Brunet
Cours machines asynchrones. *
Alain Cunire. Gilles Feld.