Embed Size (px)
Citation preview
������������������������ �������� �����������������������������
METHODE DES ELEMENTS FINIS (MEF)
APPLIQUEE AU DIMENSIONNEMENT DES STRUCTURES
ETUDES STATIQUES
PARTIE A - RAPPELS DE STATIQUE I Actions mécaniques – isolement d’un ensemble mécanique ……………..1 II Principe fondamental de la statique …………….. 7 III Méthodes graphiques …………….. 8 PARTIE B - ELEMENTS DE RESISTANCE DES MATERIAUX I Hypothèses générales de la RdM – Modèle poutre …………….. 10 II Torseur de cohésion …………….. 13 III Définitions des sollicitations …………….. 22 IV Contrainte en un point M d’une section S …………….. 24 V Traction / compression – action de l’effort normal …………….. 26 VI Essais mécaniques …………….. 29 VII La flexion simple – action du moment de flexion …………….. 35 VIII Le cisaillement simple – action de l’effort tranchant …………….. 37 IX La torsion pure – action du moment de torsion …………….. 38 PARTIE C - MEF APPLIQUEE Travaux pratiques sur logiciel (CosmosWorks® 2008) Etude de dimensionnement du tire-bouchon breveté
M.M. 02/11/08
ELEMENTS FINIS
1/40
Eléments de cours
De la statique à la RdM
PARTIE A - STATIQUE I ACTIONS MECANIQUES – ISOLEMENT D’UN ENSEMBLE MECANIQUE 1 – but. * dresser le bilan des actions mécaniques extérieures qui s’exercent sur le système matériel isolé. * modéliser les actions mécaniques subies par les systèmes matériels isolés.
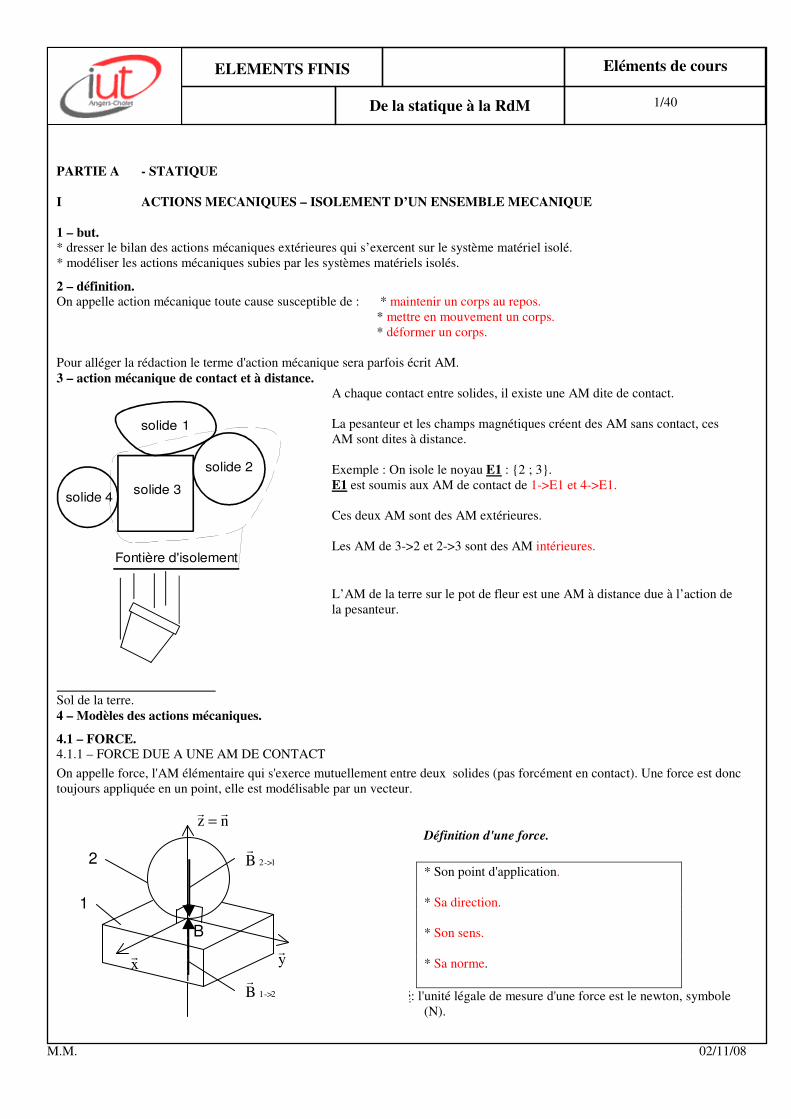
2 – définition. On appelle action mécanique toute cause susceptible de : * maintenir un corps au repos. * mettre en mouvement un corps. * déformer un corps. Pour alléger la rédaction le terme d'action mécanique sera parfois écrit AM. 3 – action mécanique de contact et à distance.
solide 1
solide 3
solide 2
solide 4
Fontière d'isolement
A chaque contact entre solides, il existe une AM dite de contact. La pesanteur et les champs magnétiques créent des AM sans contact, ces AM sont dites à distance. Exemple : On isole le noyau E1 : {2 ; 3}. E1 est soumis aux AM de contact de 1->E1 et 4->E1. Ces deux AM sont des AM extérieures. Les AM de 3->2 et 2->3 sont des AM intérieures.
Sol de la terre.
L’AM de la terre sur le pot de fleur est une AM à distance due à l’action de la pesanteur.
4 – Modèles des actions mécaniques.
4.1 – FORCE. 4.1.1 – FORCE DUE A UNE AM DE CONTACT On appelle force, l'AM élémentaire qui s'exerce mutuellement entre deux solides (pas forcément en contact). Une force est donc toujours appliquée en un point, elle est modélisable par un vecteur.
1
2
nz�� =
B
x� y
�
B�
1->2
B�
2->1
Définition d'une force. * Son point d'application. * Sa direction. * Son sens. * Sa norme.
Unité: l'unité légale de mesure d'une force est le newton, symbole (N).

M.M. 02/11/08
ELEMENTS FINIS
2/40
Eléments de cours
De la statique à la RdM
L’unité de la norme d’une force ou des composantes du
vecteur représentant d’une force est le newton.
Définition de B�
1->2. * Son point d'application : B * Sa direction : n
�
* Son sens : + n�
* Sa norme : || B�
1->2 || = 120 N
Définition de B�
2->1. * Son point d'application : B * Sa direction : n
�
* Son sens : - n�
* Sa norme. || B�
2->1 || = || B�
1->2 || = 120 N
Composante de B�
1->2. = 0 0 120 N
Composante de B�
2->1. = 0 0 -120 N
4.1.2 - PRINCIPE DES ACTIONS MUTUELLES.
Toute force implique l'existence d'une autre force qui lui est directement opposée, soit B�
1->2. = - B�
2->1. 4.1.3 - FORCE DUE A UNE AM A DISTANCE – CAS DU CHAMP DE PESANTEUR.
1G
verticale Vers lehaut
G�
π->1
Définition de l'action de la pesanteur : G�
ππππ->1. * Son point d'application : G centre de gravité. * Sa direction : la verticale. * Son sens : de haut en bas
* Sa norme : || G�
π->1 || = m1 . g
Unités : * || G�
π->1 || en newton, symbole (N). * m1 masse du solide 1 en kilogramme, symbole (kg). * g accélération de la pesanteur en (m/s²).
Remarque : pour des volumes simples le centre de gravité G se situe à l'intersection des plans de symétries. En unités du système international (USI), i.e. MKSA (Mètre – Kilogramme – Seconde – Ampère), la force correspond donc à la
quantité kg.m/s2.
M.M. 02/11/08
ELEMENTS FINIS
3/40
Eléments de cours
De la statique à la RdM
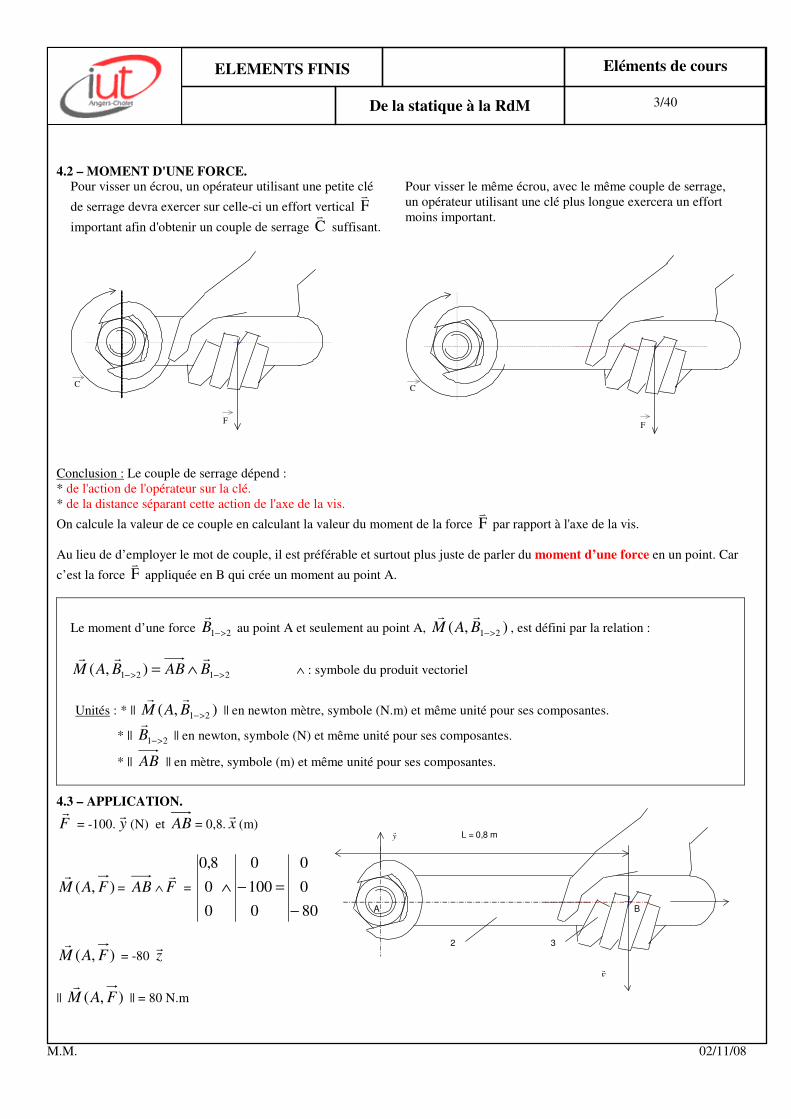
4.2 – MOMENT D'UNE FORCE. Pour visser un écrou, un opérateur utilisant une petite clé
de serrage devra exercer sur celle-ci un effort vertical F�
important afin d'obtenir un couple de serrage C�
suffisant.
C
F
Pour visser le même écrou, avec le même couple de serrage, un opérateur utilisant une clé plus longue exercera un effort moins important.
F
C
Conclusion : Le couple de serrage dépend : * de l'action de l'opérateur sur la clé. * de la distance séparant cette action de l'axe de la vis.
On calcule la valeur de ce couple en calculant la valeur du moment de la force F�
par rapport à l'axe de la vis. Au lieu de d’employer le mot de couple, il est préférable et surtout plus juste de parler du moment d’une force en un point. Car
c’est la force F�
appliquée en B qui crée un moment au point A.
Le moment d’une force 21 >−B�
au point A et seulement au point A, ),( 21 >−BAM��
, est défini par la relation :
2121 ),( >−>− ∧= BABBAM���
∧ : symbole du produit vectoriel
Unités : * || ),( 21 >−BAM��
|| en newton mètre, symbole (N.m) et même unité pour ses composantes.
* || 21 >−B�
|| en newton, symbole (N) et même unité pour ses composantes.
* || AB || en mètre, symbole (m) et même unité pour ses composantes.
4.3 – APPLICATION.
F�
= -100. y�
(N) et AB = 0,8. x�
(m)
),( FAM�
= AB ∧ F�
=
800
0
0100
0
00
8,0
−=−∧
),( FAM�
= -80 z�
|| ),( FAM�
|| = 80 N.m
F�
y�
A B
L = 0,8 m
2 3
M.M. 02/11/08
ELEMENTS FINIS
4/40
Eléments de cours
De la statique à la RdM
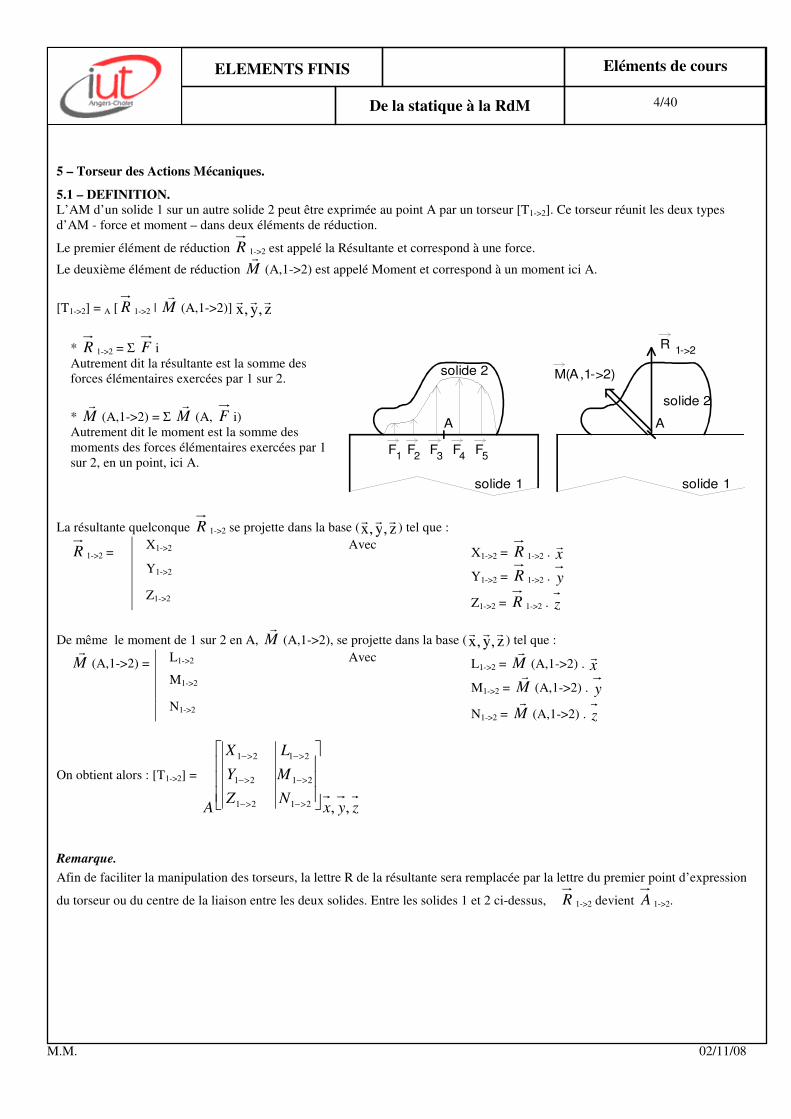
5 – Torseur des Actions Mécaniques.
5.1 – DEFINITION. L’AM d’un solide 1 sur un autre solide 2 peut être exprimée au point A par un torseur [T1->2]. Ce torseur réunit les deux types d’AM - force et moment – dans deux éléments de réduction.
Le premier élément de réduction R 1->2 est appelé la Résultante et correspond à une force.
Le deuxième élément de réduction M�
(A,1->2) est appelé Moment et correspond à un moment ici A.
[T1->2] = A [ R 1->2 | M�
(A,1->2)] � � �x y z, ,
* R 1->2 = Σ F i Autrement dit la résultante est la somme des forces élémentaires exercées par 1 sur 2.
* M�
(A,1->2) = Σ M�
(A, F i) Autrement dit le moment est la somme des moments des forces élémentaires exercées par 1 sur 2, en un point, ici A. solide 1
solide 2
F1 F2 F3 F4 F5
A
solide 1
solide 2
R 1->2
A
M(A,1->2)
La résultante quelconque R 1->2 se projette dans la base (� � �x y z, , ) tel que :
R 1->2 = X1->2 Avec X1->2 = R 1->2 . x�
Y1->2 Y1->2 = R 1->2 . y Z1->2 Z1->2 = R 1->2 . z
De même le moment de 1 sur 2 en A, M�
(A,1->2), se projette dans la base (� � �x y z, , ) tel que :
M�
(A,1->2) = L1->2 Avec L1->2 = M�
(A,1->2) . x�
M1->2 M1->2 = M
�(A,1->2) . y
N1->2 N1->2 = M�
(A,1->2) . z
On obtient alors : [T1->2] =
zyxN
M
L
Z
Y
X
A ,,21
21
21
21
21
21
���
�
�
���
�
�
>−
>−
>−
>−
>−
>−
Remarque. Afin de faciliter la manipulation des torseurs, la lettre R de la résultante sera remplacée par la lettre du premier point d’expression
du torseur ou du centre de la liaison entre les deux solides. Entre les solides 1 et 2 ci-dessus, R 1->2 devient A 1->2.

M.M. 02/11/08
ELEMENTS FINIS
5/40
Eléments de cours
De la statique à la RdM
5.2 – CHANGEMENT DE POINT DE REDUCTION.
Soit [T1->2] = A [ A�
1->2 | M�
(A,1->2)] � � �x y z, , , les éléments de réductions en A du torseur des AM de 1 sur 2 dans le repère R.
Les éléments de réduction en B du même torseur s’expriment par : [T1->2] = B [ A�
1->2 | M�
(B,1->2)] � � �x y z, ,
* la résultante est invariante. * le moment varie.
Le moment se calcule à l’aide de la relation suivante :
M�
(B,1->2) = M�
(A,1->2) + BA ∧ A�
1->2
5.3 – APPLICATION.
21 >−B�
y�
A B
L = 0,8 m
2 3
Ce que nous avons appelé jusqu’ici, dans un but de simplification, la force F est en fait la résultante B 3->2 de plusieurs forces élémentaires réparties sur la surface de contact entre la main et la clé. L’action mécanique de l’opérateur 3 sur la clé 2 au point B peut être exprimée par un torseur écrit au point B.
Le premier élément de réduction du torseur est la résultante : B 3->2 = -100 y . Le deuxième élément de réduction du torseur est le moment au point B, que l’on supposera nul du fait de la répartition des forces
élémentaires : M�
(B,3->2) = 0�
.
Nous avons donc : [T3->2] =
zyxB ,,000
01000
���
�
�
���
�
�
−
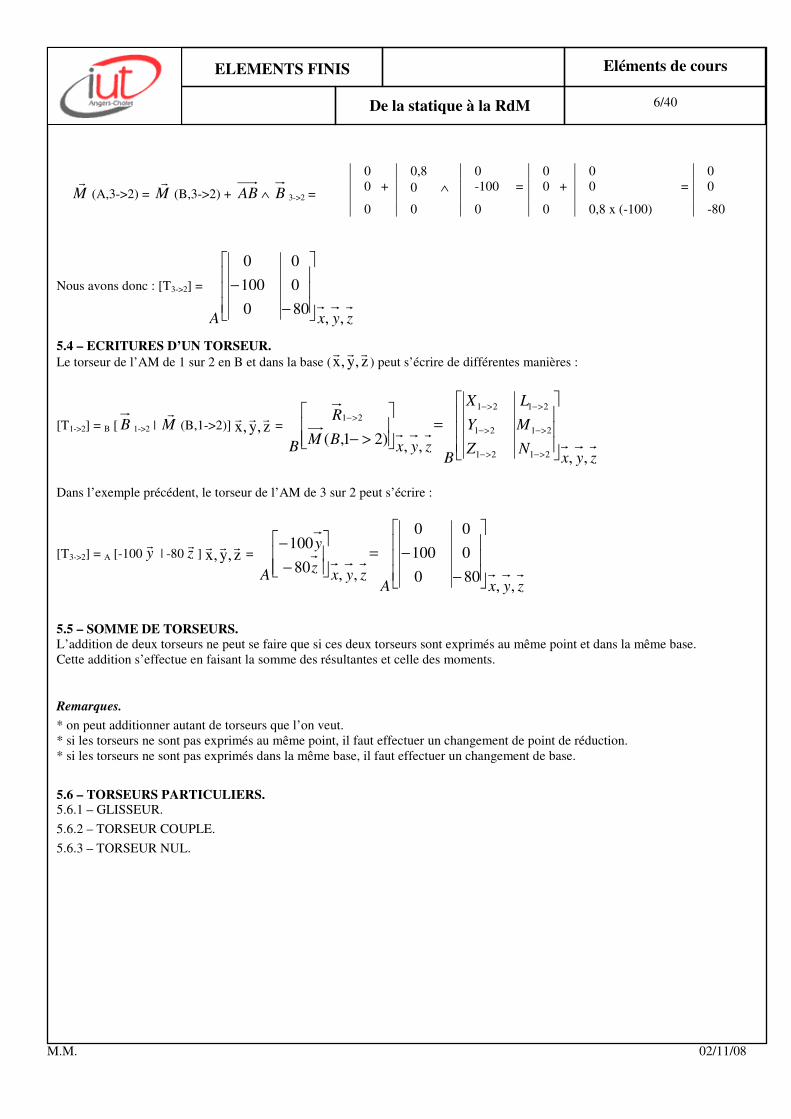
On peut aussi écrire ce même torseur au point A (changement de point de réduction).
La résultante du torseur reste inchangée : B 3->2 = -100 y . Le moment du torseur doit être lui recalculé en utilisant la relation de changement de point de réduction.
M.M. 02/11/08
ELEMENTS FINIS
6/40
Eléments de cours
De la statique à la RdM
0 0,8 0 0 0 0
M�
(A,3->2) = M�
(B,3->2) + AB ∧ B 3->2 = 0 + 0 ∧ -100 = 0 + 0 = 0
0 0 0 0 0,8 x (-100) -80
Nous avons donc : [T3->2] =
zyxA ,,8000
01000
���
�
�
���
�
�
−−
5.4 – ECRITURES D’UN TORSEUR. Le torseur de l’AM de 1 sur 2 en B et dans la base (
� � �x y z, , ) peut s’écrire de différentes manières :
[T1->2] = B [ B 1->2 | M�
(B,1->2)] � � �x y z, , =
zyxN
M
L
Z
Y
X
BzyxBM
R
B,,
,,)21,(21
21
21
21
21
2121
���
�
�
���
�
�
=���
�
���
�
>−>−
>−
>−
>−
>−
>−>−
Dans l’exemple précédent, le torseur de l’AM de 3 sur 2 peut s’écrire :
[T3->2] = A [-100 y�
| -80 z�
] � � �x y z, , =
zyxAzyxz
y
A,,80
00
01000
,,80
100
���
�
�
���
�
�
−−=
���
�
���
�
−−
5.5 – SOMME DE TORSEURS. L’addition de deux torseurs ne peut se faire que si ces deux torseurs sont exprimés au même point et dans la même base. Cette addition s’effectue en faisant la somme des résultantes et celle des moments.
Remarques. * on peut additionner autant de torseurs que l’on veut. * si les torseurs ne sont pas exprimés au même point, il faut effectuer un changement de point de réduction. * si les torseurs ne sont pas exprimés dans la même base, il faut effectuer un changement de base.
5.6 – TORSEURS PARTICULIERS. 5.6.1 – GLISSEUR. 5.6.2 – TORSEUR COUPLE. 5.6.3 – TORSEUR NUL.
M.M. 02/11/08
ELEMENTS FINIS
7/40
Eléments de cours
De la statique à la RdM
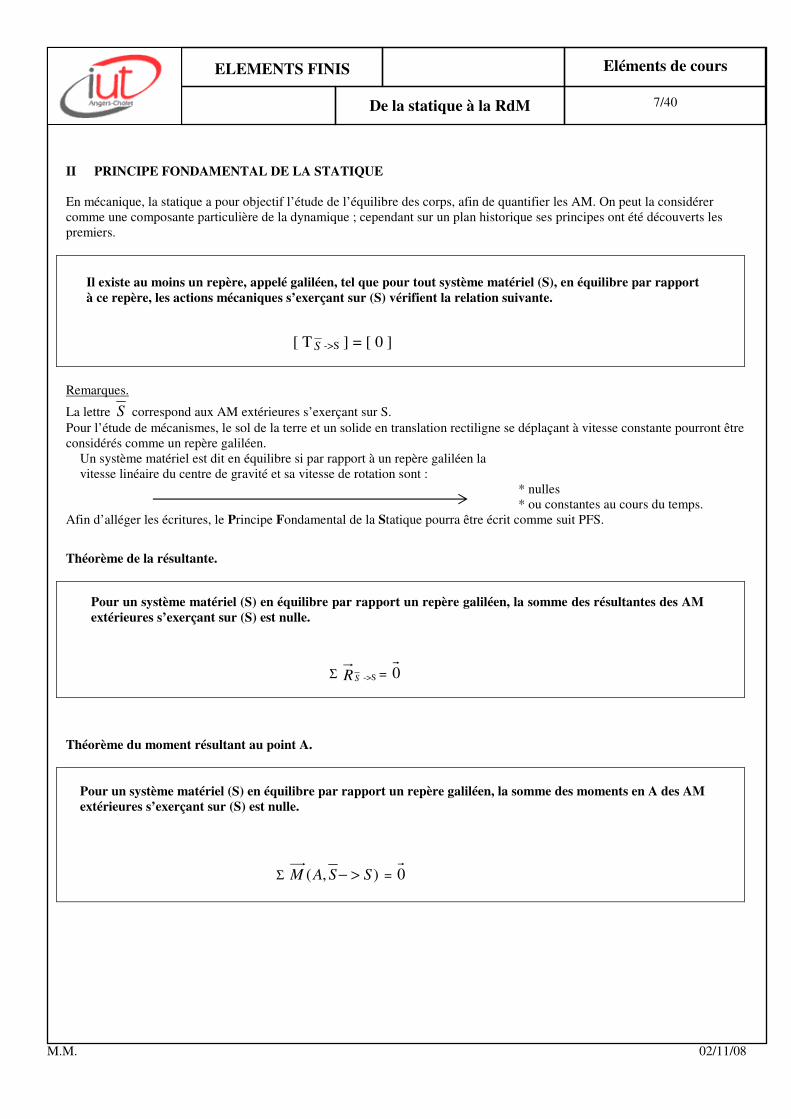
II PRINCIPE FONDAMENTAL DE LA STATIQUE En mécanique, la statique a pour objectif l’étude de l’équilibre des corps, afin de quantifier les AM. On peut la considérer comme une composante particulière de la dynamique ; cependant sur un plan historique ses principes ont été découverts les premiers.
[ T S ->S ] = [ 0 ]
Remarques.
La lettre S correspond aux AM extérieures s’exerçant sur S. Pour l’étude de mécanismes, le sol de la terre et un solide en translation rectiligne se déplaçant à vitesse constante pourront être considérés comme un repère galiléen.
Un système matériel est dit en équilibre si par rapport à un repère galiléen la vitesse linéaire du centre de gravité et sa vitesse de rotation sont :
* nulles * ou constantes au cours du temps.
Afin d’alléger les écritures, le Principe Fondamental de la Statique pourra être écrit comme suit PFS.
Théorème de la résultante.
Σ SR ->S = 0
Théorème du moment résultant au point A.
Pour un système matériel (S) en équilibre par rapport un repère galiléen, la somme des moments en A des AM extérieures s’exerçant sur (S) est nulle.
Σ ),( SSAM >− = 0
Il existe au moins un repère, appelé galiléen, tel que pour tout système matériel (S), en équilibre par rapport à ce repère, les actions mécaniques s’exerçant sur (S) vérifient la relation suivante.
Pour un système matériel (S) en équilibre par rapport un repère galiléen, la somme des résultantes des AM extérieures s’exerçant sur (S) est nulle.
M.M. 02/11/08
ELEMENTS FINIS
8/40
Eléments de cours
De la statique à la RdM
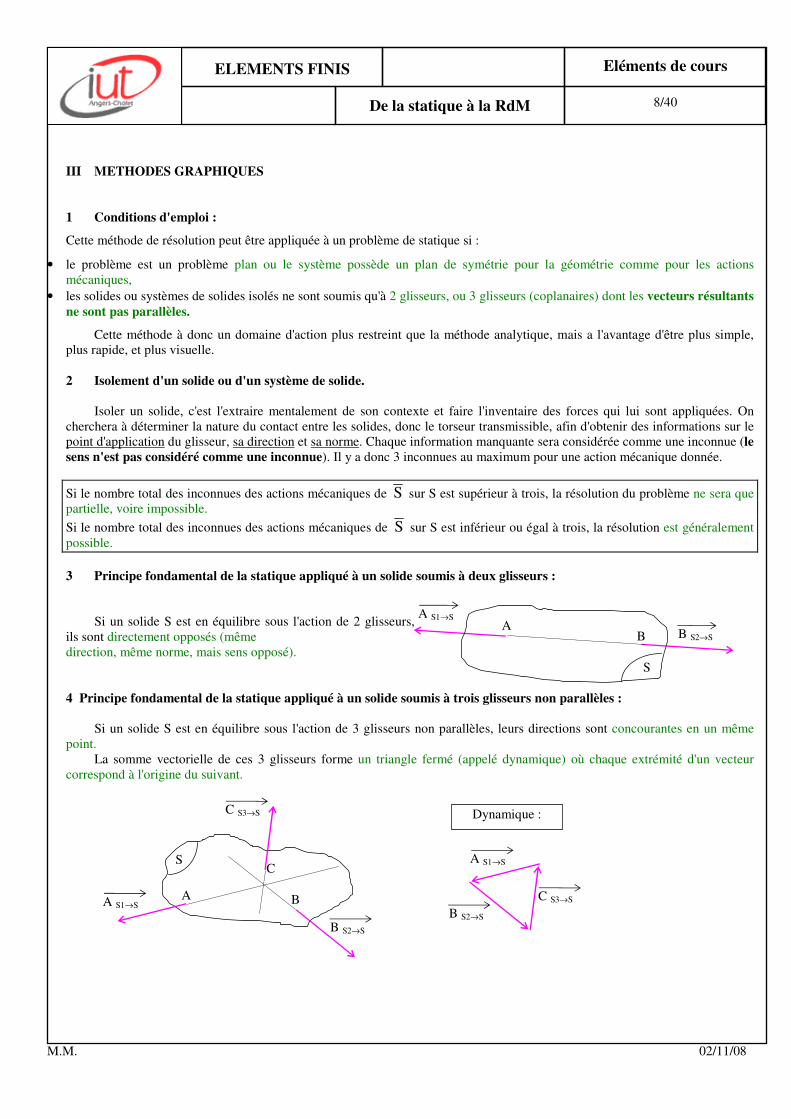
III METHODES GRAPHIQUES 1 Conditions d'emploi :
Cette méthode de résolution peut être appliquée à un problème de statique si :
• le problème est un problème plan ou le système possède un plan de symétrie pour la géométrie comme pour les actions mécaniques,
• les solides ou systèmes de solides isolés ne sont soumis qu'à 2 glisseurs, ou 3 glisseurs (coplanaires) dont les vecteurs résultants ne sont pas parallèles.
Cette méthode à donc un domaine d'action plus restreint que la méthode analytique, mais a l'avantage d'être plus simple, plus rapide, et plus visuelle. 2 Isolement d'un solide ou d'un système de solide.
Isoler un solide, c'est l'extraire mentalement de son contexte et faire l'inventaire des forces qui lui sont appliquées. On cherchera à déterminer la nature du contact entre les solides, donc le torseur transmissible, afin d'obtenir des informations sur le point d'application du glisseur, sa direction et sa norme. Chaque information manquante sera considérée comme une inconnue (le sens n'est pas considéré comme une inconnue). Il y a donc 3 inconnues au maximum pour une action mécanique donnée.
Si le nombre total des inconnues des actions mécaniques de S sur S est supérieur à trois, la résolution du problème ne sera que partielle, voire impossible. Si le nombre total des inconnues des actions mécaniques de S sur S est inférieur ou égal à trois, la résolution est généralement possible. 3 Principe fondamental de la statique appliqué à un solide soumis à deux glisseurs :
Si un solide S est en équilibre sous l'action de 2 glisseurs, ils sont directement opposés (même direction, même norme, mais sens opposé). 4 Principe fondamental de la statique appliqué à un solide soumis à trois glisseurs non parallèles :
Si un solide S est en équilibre sous l'action de 3 glisseurs non parallèles, leurs directions sont concourantes en un même point.
La somme vectorielle de ces 3 glisseurs forme un triangle fermé (appelé dynamique) où chaque extrémité d'un vecteur correspond à l'origine du suivant.
S
A B
A S1→S
B S2→S
S
A
B
C
C S3→S
A S1→S
B S2→S B S2→S
A S1→S
C S3→S
Dynamique :
M.M. 02/11/08
ELEMENTS FINIS
9/40
Eléments de cours
De la statique à la RdM
PARTIE B - RESISTANCE DES MATERIAUX (RdM)
PREAMBULE La modélisation des pièces réelles par des solides rigides (indéformables) permet de rendre compte de bon nombre de phénomènes ; cette modélisation suffit pour étudier la cinématique d’un mécanisme, déterminer les efforts qui s’applique sur tel composant mécanique. Cette modélisation permet de gérer les petits déplacements dans les assemblages avec jeux. On peut ou non faire intervenir le frottement de glissement, voire de roulement ou de pivotement… Bref, la mécanique du solide indéformable que nous venons de traiter brièvement dans le cadre de la première partie de ce cours, sous l’aspect statique est loin d’être inutile mais elle n’est pas suffisante. En effet, cette modélisation possède des limites : en aucune façon elle ne peut fournir des renseignements sur la tenue d’une pièce. Elle ne peut répondre à la simple question : « le diamètre de cet arbre cylindrique est-il suffisant pour encaisser, sans se rompre ni même se déformer de façon irréversible, le couple qui lui est appliqué ? ». Cela n’est d’ailleurs pas étonnant car on comprend bien que la réponse à cette question passe par la connaissance du matériau qui constitue l’arbre… Un arbre en matière plastique se déformera plus sous l’effet du couple qu’un cylindre en acier. Les solides réels sont tous plus ou moins déformables sous l’action d’efforts extérieurs. Cette notion de rigidité se rapporte à la propriété d’élasticité (et à la notion de cohésion d’une structure), très générale que l’on retrouve dans pratiquement tous les matériaux, sous réserve que les efforts internes (contraintes) dans les solides restent inférieurs à certaines valeurs limites. Nous n’étudierons pas ce qui se passe au delà de cette limite (limite élastique), car ce domaine d’étude, très vaste, correspond au domaine d’étude des matériaux en phase plastique et est du ressort de la théorie de l’élasto-plasticité… Nous considérerons dorénavant les corps matériels comme doués d’élasticité. Ainsi, les actions mécaniques extérieures qui s’applique à un système ainsi considéré imposent des déformations qui, transmises de proche en proche, modifient l’attraction des molécules matérielles ; lorsque les déformations sont achevées sans qu’il se soit produit de rupture, un nouvel état d’équilibre interne s’établit en chaque point et l’ensemble des nouvelles forces intérieures viendra contrebalancer le système d’actions mécaniques extérieures. Si ces actions cessent, les déformations peuvent s’annuler plus ou moins complètement, et les corps reprennent plus ou moins leur position d’équilibre initial… Nous verrons que la théorie de l’élasticité, dont le but, d’une façon précise, est de déterminer les relations existant entre les forces et les déformations, ne traite, en vertu des hypothèses qui lui servent de base, que des corps « idéaux », i.e homogènes, isotropes, parfaitement élastiques. Or de tels corps n’existent pas dans la réalité. On conçoit donc que la théorie mathématique de l’élasticité soit difficilement applicable à la pratique de la conception mécanique. Elle se traduit par des équations compliquées, généralement différentielles, qu’on ne sait résoudre que dans des cas exceptionnels. Mais on utilisera cette théorie exacte sur des modélisation simple d’objets réels complexes, puis on utilisera des coefficients de correction ou de sécurité ; une autre approche, beaucoup plus précise, consiste en la modélisation d’une structure complexe en éléments simples (ex : une surface triangulaire) dont on connaît parfaitement les lois élastiques, et au calcul via une assistance informatique de la structure globale : c’est la méthode des éléments finis, de plus en plus utilisée de nos jours (partie C). Il faut bien comprendre, en effet, que les matériaux sont des « corps vivants » : si les charges auxquelles ils sont soumis augmentent ou se répètent fréquemment, ou sont appliquées avec choc, ou restent en place très longtemps, ou si, d’autre part, pour des causes diverses (intempéries, traitements thermiques), leur constitution vient à se modifier, leur résistance va diminuer, et les déformations prises peuvent ne pas s’annuler avec les efforts extérieurs ; il restera des déformations permanentes qui pourront aller dans certains cas en augmentant (phénomène d’hystérésis); ces déformations pourront même conduire à la rupture… Dans la pratique, l’étude d’un système sous l’approche de la théorie de l’élasticité doit permettre de valider le choix des dimensions d’un matériau en fonction des conditions d’utilisation pour que celui-ci supporte le chargement suivant la durée de vie escomptée ; on choisira toujours le minimum de matière compatible avec la résistance et la sécurité souhaitées. Nota : La résistance des matériaux est une science expérimentale récente. XVIe siècle : GALILEO GALILEI (1564-1642, italien) effectue des essais de traction et de flexion,
: Robert HOOKE (1635-1703, anglais) énonce la première loi de comportement d’une poutre en traction, : Charles de COULOMB (1736-1806, France) adopte la coupure sur une poutre et établit une méthode de calcul
d’une poutre fléchie. XIXe : Henri NAVIER (1785-1836, France) établit un cours doctoral.
M.M. 02/11/08
ELEMENTS FINIS
10/40
Eléments de cours
De la statique à la RdM
I - Hypothèses générales de la Résistance des Matériaux Le modèle Poutre
INTRODUCTION La Résistance des Matériaux est une particularisation aux milieux unidimensionnels de l’étude des milieux continus tridimensionnels des formes élancées. Lorsque la plus grande dimension de la section droite d’un solide est inférieure au vingtième de sa longueur, on parle de Poutre ou de Barre (Ce critère n’est pas toujours vérifié dans la pratique en construction mécanique, et sera à considérer lors de la définition d’un coefficient de sécurité). Cette particularité géométrique du solide permet de faire des hypothèses qui simplifient l’étude tridimensionnelle tout en conduisant à des résultats suffisamment proches de la solution analytique ou numérique (par éléments finis).
HYPOTHESES SUR LE MATERIAU Continuité : les métaux ont une structure granulaire, mais les distances intermoléculaires sont petites devant les dimensions utilisées en Résistance des Matériaux, d’où l’hypothèse de continuité. Homogénéité : un corps est homogène quand en chacun de ses points il possède la même constitution et la même structure. Ce n’est théoriquement jamais le cas : au microscope, l’acier se dissocie en fer et carbone, mais il paraît « homogène » à l’œil nu ; de même, la mousse de polyuréthanne vue de près présente de nombreuses irrégularités, mais vue de loin la matière semble « continue ». On admettra l’homogénéité de la matière si les irrégularités sont très petites par rapport aux dimensions de la pièce, pour n’avoir ainsi aucune influence sur les propriétés de résistance et déformations de la matière étudiée. Cela sera très proche de la réalité pour les métaux, mais une modélisation grossière pour le bois ou le béton. Isotropie : un solide est dit isotrope si, en tous les points de sa masse et suivant toutes les directions autour d’un point quelconque, il a les mêmes propriétés mécaniques. En réalité, les matériaux ne possèdent qu’approximativement cette propriété :
� l’isotropie est souvent vérifiée pour les aciers, mais ne l’est plus ni pour les matériaux à structure fibreuse (bois : facile à fendre dans le sens des fibres – fibres de carbone etc...) ni pour les matériaux composites.
� la mousse de polyuréthanne, les matières plastiques et les métaux moulés sont isotropes. Mais, l’acier forgé ou laminé est plus résistant dans le sens des fibres que perpendiculairement à celles-ci (exemple de la vis forgée coupée : la vis ne devra pas travailler au cisaillement ! … d’où l’utilisation de la goupille de cisaillement …). HYPOTHESES SUR LA DISPOSITION DE LA MATIERE La Résistance des Matériaux étudie des solides de formes relativement simples. Les solides étudiés présenteront :
� des axes de symétrie, � une dimension principale, � des dimensions transversales variant de façon continue (en général).
M.M. 02/11/08
ELEMENTS FINIS
11/40
Eléments de cours
De la statique à la RdM
MODELE POUTRE C’est un solide engendré par une surface plane (S) dont le centre de surface (G) décrit une courbe plane (C) appelée ligne moyenne. Ses caractéristiques sont
� ligne moyenne droite ou à grand rayon de courbure, � grande longueur par rapport aux dimensions transversales, � existence d’un plan de symétrie, � des points disposés de façon identique sur les sections droites jouissent de certaines propriétés communes : on dit qu’ils
appartiennent à des fibres, � la ligne ou fibre moyenne possède des propriétés particulières que nous développerons plus loin.
L’étude des pièces selon le modèle poutre permet une simplification importante des lois de déformations et de résistance de celles-ci. On voit ici l’intérêt qu’a le concepteur à adapter un coefficient de sécurité important dans la détermination des sections des pièces. En général, l’étude portera sur les poutre droites, i.e. à courbure nulle. HYPOTHESES SUR LES FORMES EXTERIEURES
PLAN DE SYMETRIE (POUR LE CHARGEMENT) Les forces extérieures seront situées dans le plan de symétrie de la poutre ou bien disposées symétriquement par rapport à ce plan, de façon à se ramener au cas d’étude de « statique plane ».
POINTS OU ZONES D’APPLICATION DES FORCES A partir du moment où l’on envisage un calcul de résistance ou de déformation, il n’est plus possible de remplacer un système des forces extérieures par un système équivalent (exemple : le système constitué d’une « toiture »sollicitée par l’action mécanique répartie de la neige résiste, mais cette même « toiture » sollicitée par une force concentrée correspondant au poids global de la neige ne résistera pas : la pression serait trop grande, et même infinie en toute rigueur …).
TYPES D’ACTIONS MECANIQUES EXTERIEURES Deux types d’actions peuvent s’exercer :
� charges concentrées : un moment, une force, � charges réparties, définies par sa densité linéique en N/m ou surfacique en N/m2 voire volumique…
HYPOTHESE DES PETITES DEFORMATIONS Dans le cadre de la Théorie de l’Elasticité Linéaire, chaque point du solide étudié ne subit que des déplacements petits vis-à-vis de la plus petite dimension caractéristique du solide. On se place donc toujours au voisinage de l’état naturel non déformé, c’est-à-dire en configuration de Lagrange1. Les fonctions à valeur scalaire ou vectorielle intervenant dans l’étude seront donc définies à l’aide des coordonnées Lagrangiennes. En conséquence, dans le cadre des études de résistance des Matériaux, le calcul des éléments de réduction des torseurs des efforts intérieurs et extérieurs (qui seront définis par la suite) ainsi que la description du déplacement s’effectuent dans la configuration initiale non déformée. ! Les déformations considérées seront petites devant les dimensions de la poutre, dons on appliquera le P.F.S. dans l’état non déformé, i.e. en considérant le solide indéformable.
HYPOTHESE DE NAVIER ET DE BERNOULLI2
1 Comte Louis de Lagrange, Mathématicien français, né à Turin (1736 – 1813), développa le calcul différentiel et intégral … 2 Daniel Bernoulli (1700 – 1782) fondateur de l’hydrodynamique moderne.
M.M. 02/11/08
ELEMENTS FINIS
12/40
Eléments de cours
De la statique à la RdM
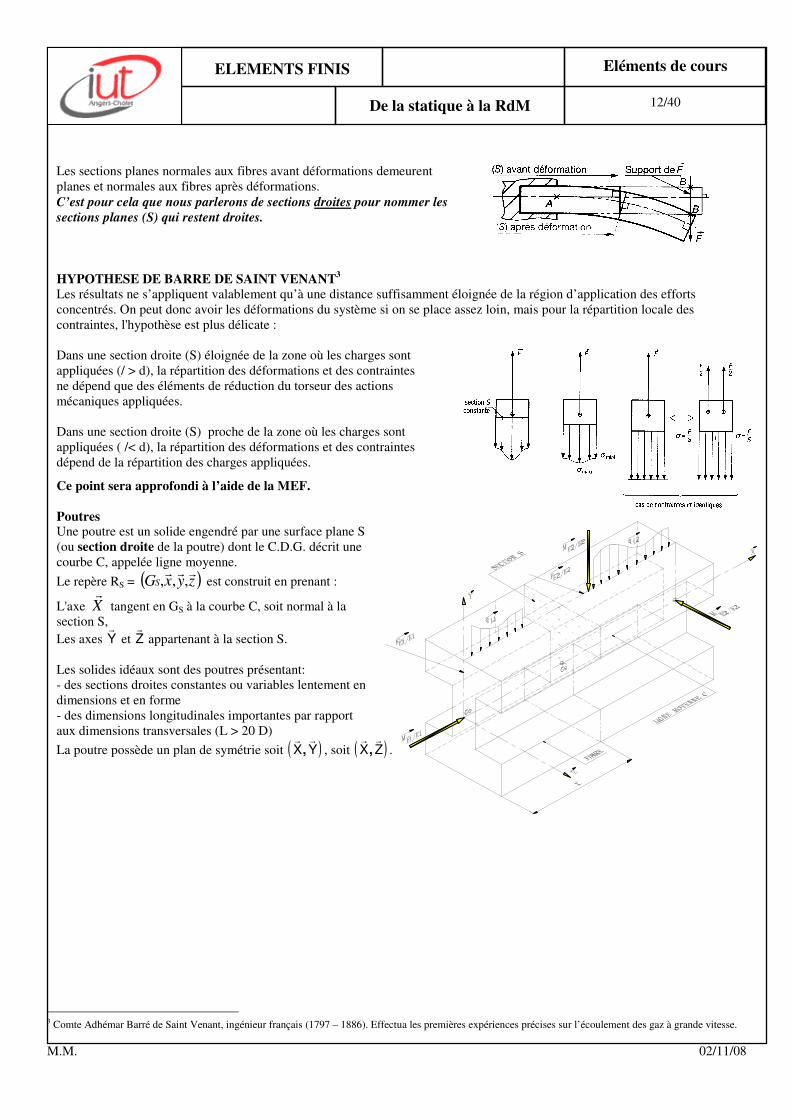
Les sections planes normales aux fibres avant déformations demeurent planes et normales aux fibres après déformations. C’est pour cela que nous parlerons de sections droites pour nommer les sections planes (S) qui restent droites.
HYPOTHESE DE BARRE DE SAINT VENANT3 Les résultats ne s’appliquent valablement qu’à une distance suffisamment éloignée de la région d’application des efforts concentrés. On peut donc avoir les déformations du système si on se place assez loin, mais pour la répartition locale des contraintes, l'hypothèse est plus délicate : Dans une section droite (S) éloignée de la zone où les charges sont appliquées (/ > d), la répartition des déformations et des contraintes ne dépend que des éléments de réduction du torseur des actions mécaniques appliquées. Dans une section droite (S) proche de la zone où les charges sont appliquées ( /< d), la répartition des déformations et des contraintes dépend de la répartition des charges appliquées.
Ce point sera approfondi à l’aide de la MEF. Poutres Une poutre est un solide engendré par une surface plane S (ou section droite de la poutre) dont le C.D.G. décrit une courbe C, appelée ligne moyenne. Le repère RS = ( )zyxGS
���,,, est construit en prenant :
L'axe X�
tangent en GS à la courbe C, soit normal à la section S, Les axes
�Y et
�Z appartenant à la section S.
Les solides idéaux sont des poutres présentant: - des sections droites constantes ou variables lentement en dimensions et en forme - des dimensions longitudinales importantes par rapport aux dimensions transversales (L > 20 D) La poutre possède un plan de symétrie soit ( )� �
X Y, , soit ( )� �X Z, .
3 Comte Adhémar Barré de Saint Venant, ingénieur français (1797 – 1886). Effectua les premières expériences précises sur l’écoulement des gaz à grande vitesse.
M.M. 02/11/08
ELEMENTS FINIS
13/40
Eléments de cours
De la statique à la RdM
Superposition des déformations La déformation en un point M de la poutre due à plusieurs A.M. est égale à la somme des déformations dues à chaque A.M. prises isolément.
Superposition des contraintes La contrainte en un point M de la poutre due à plusieurs A.M. est égale à la somme des contraintes dues à chaque A.M. prises isolément.
Définition des liaisons poutre/bâti Il n'existe technologiquement que quatre appuis principaux :
TYPE D'APPUI RESULTANTE MOMENT
Un appui simple d'axe �Y ou
�Z Perpendiculaire à
�X Nul
Un pivot d'axe �Y ou
�Z Appartenant à ( )� �
X Y, ou ( )� �X Z, Sur
�X (ou nul si problème plan)
Une rotule Appartenant à ( )� �X Y, ou ( )� �
X Z, Nul
Un encastrement Quelconque Quelconque
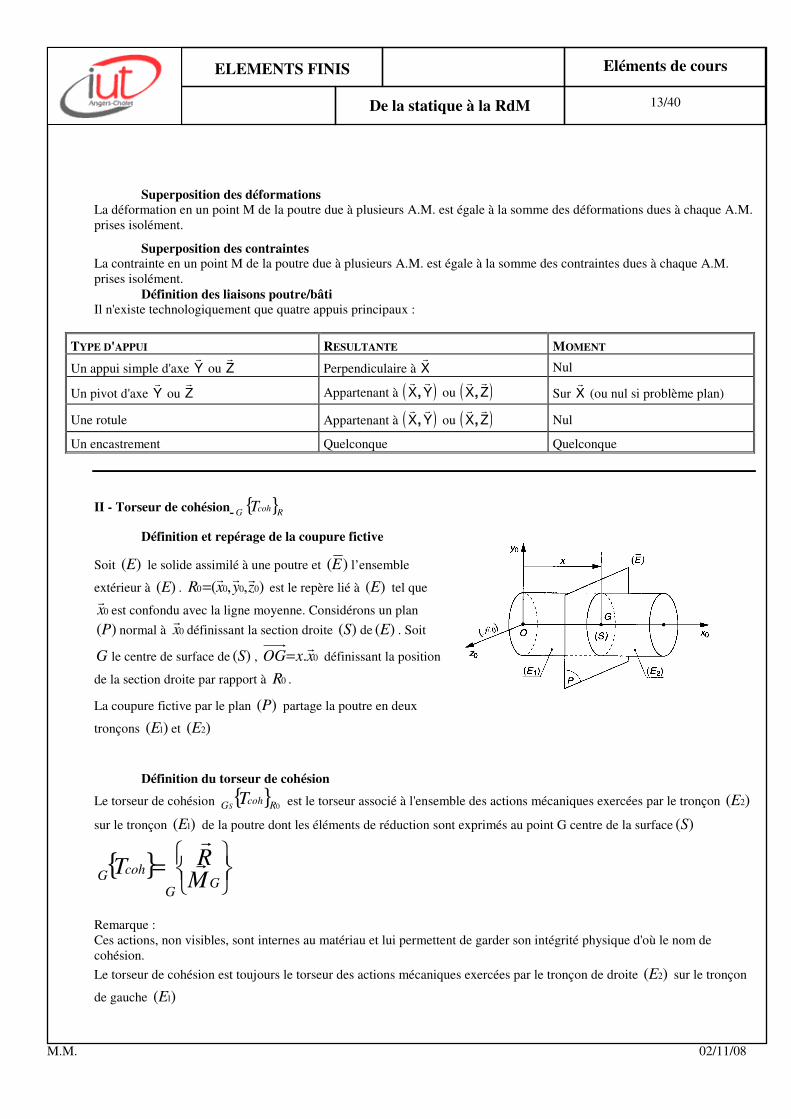
II - Torseur de cohésion { }RcohG T
Définition et repérage de la coupure fictive
Soit )(E le solide assimilé à une poutre et )(E l’ensemble
extérieur à )(E . ),,( 0000 zyxR���= est le repère lié à )(E tel que
0x�
est confondu avec la ligne moyenne. Considérons un plan )(P normal à 0x
�définissant la section droite )(S de )(E . Soit
G le centre de surface de )(S , 0.xxOG�= définissant la position
de la section droite par rapport à 0R .
La coupure fictive par le plan )(P partage la poutre en deux
tronçons )( 1E et )( 2E
Définition du torseur de cohésion
Le torseur de cohésion { }0RcohG T
S est le torseur associé à l'ensemble des actions mécaniques exercées par le tronçon )( 2E
sur le tronçon )( 1E de la poutre dont les éléments de réduction sont exprimés au point G centre de la surface )(S
{ }
��
��=
GG
cohG MRT �
�
Remarque : Ces actions, non visibles, sont internes au matériau et lui permettent de garder son intégrité physique d'où le nom de cohésion. Le torseur de cohésion est toujours le torseur des actions mécaniques exercées par le tronçon de droite )( 2E sur le tronçon
de gauche )( 1E
M.M. 02/11/08
ELEMENTS FINIS
14/40
Eléments de cours
De la statique à la RdM
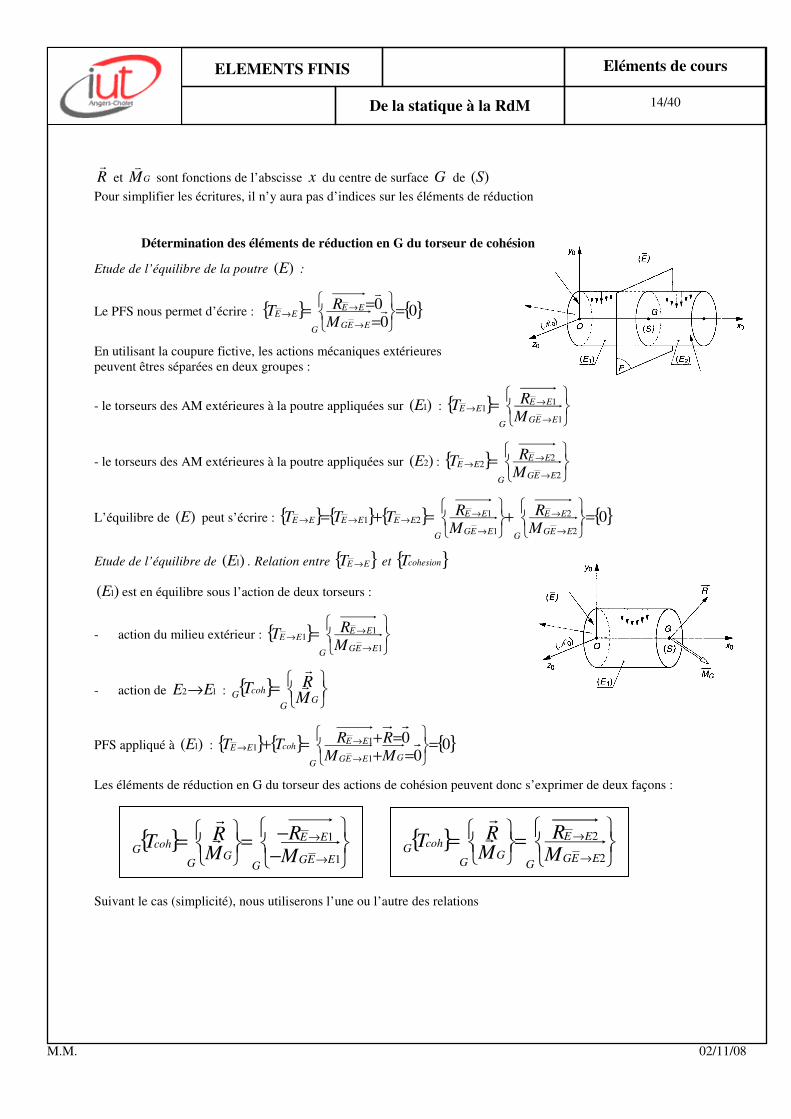
R�
et GM�
sont fonctions de l’abscisse x du centre de surface G de )(S Pour simplifier les écritures, il n’y aura pas d’indices sur les éléments de réduction
Détermination des éléments de réduction en G du torseur de cohésion
Etude de l’équilibre de la poutre )(E :
Le PFS nous permet d’écrire : { } { }00
0 =��
��
===
→
→→ �
�
EEG
EE
G
EEMRT
En utilisant la coupure fictive, les actions mécaniques extérieures peuvent êtres séparées en deux groupes :
- le torseurs des AM extérieures à la poutre appliquées sur )( 1E : { }��
��=
→
→→
1
11
EEG
EE
G
EEMRT
- le torseurs des AM extérieures à la poutre appliquées sur )( 2E : { }��
��=
→
→→
2
22
EEG
EE
G
EEMRT
L’équilibre de )(E peut s’écrire : { } { } { } { }02
2
1
121 =
��
��+
��
��=+=
→
→
→
→→→→
EEG
EE
GEEG
EE
G
EEEEEEMR
MRTTT
Etude de l’équilibre de )( 1E . Relation entre { }EET → et { }cohesionT
)( 1E est en équilibre sous l’action de deux torseurs :
- action du milieu extérieur : { }��
��=
→
→→
1
11
EEG
EE
G
EEMRT
- action de 12 EE → : { }��
��=
GG
cohG MRT �
�
PFS appliqué à )( 1E : { } { } { }00
01
11 =
��
��
=+=+=+
→
→→
GEEG
EE
G
cohEEMMRRTT
Les éléments de réduction en G du torseur des actions de cohésion peuvent donc s’exprimer de deux façons :
Suivant le cas (simplicité), nous utiliserons l’une ou l’autre des relations
{ }��
��−−=
��
��=
→
→
1
1
EEG
EE
GG
G
cohG MR
MRT �
�
{ }��
��=
��
��=
→
→
2
2
EEG
EE
GG
G
cohG MR
MRT �
�
M.M. 02/11/08
ELEMENTS FINIS
15/40
Eléments de cours
De la statique à la RdM
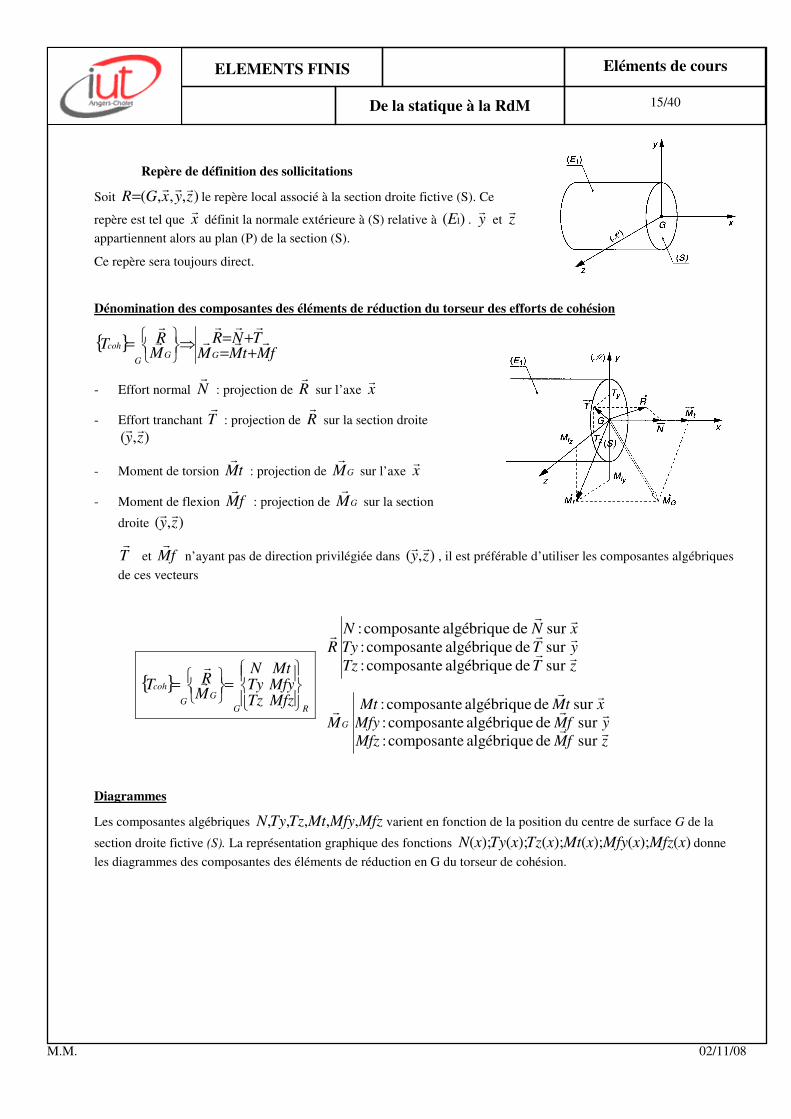
Repère de définition des sollicitations
Soit ),,,( zyxGR���= le repère local associé à la section droite fictive (S). Ce
repère est tel que x�
définit la normale extérieure à (S) relative à )( 1E . y�
et z�
appartiennent alors au plan (P) de la section (S).
Ce repère sera toujours direct.
Dénomination des composantes des éléments de réduction du torseur des efforts de cohésion
{ } fMtMMTNR
MRT
GGG
coh ���
���
�
�
+=+=
��
��=
- Effort normal N�
: projection de R�
sur l’axe x�
- Effort tranchant T�
: projection de R�
sur la section droite ),( zy��
- Moment de torsion tM�
: projection de GM�
sur l’axe x�
- Moment de flexion fM�
: projection de GM�
sur la section
droite ),( zy��
T�
et fM�
n’ayant pas de direction privilégiée dans ),( zy��
, il est préférable d’utiliser les composantes algébriques de ces vecteurs
zTTzyTTyxNN
R��
��
��
�
sur de algébrique composante : sur de algébrique composante : sur de algébrique composante :
{ }RG
GG
coh
MfzTzMfyTyMtN
MRT
��
��
�
���
=��
��= �
�
zfMMfzyfMMfy
xtMMtMG
��
��
��
�
sur de algébrique composante : sur de algébrique composante :
sur de algébrique composante :
Diagrammes
Les composantes algébriques MfzMfyMtTzTyN ,,,,, varient en fonction de la position du centre de surface G de la
section droite fictive (S). La représentation graphique des fonctions )();();();();();( xMfzxMfyxMtxTzxTyxN donne les diagrammes des composantes des éléments de réduction en G du torseur de cohésion.
M.M. 02/11/08
ELEMENTS FINIS
16/40
Eléments de cours
De la statique à la RdM
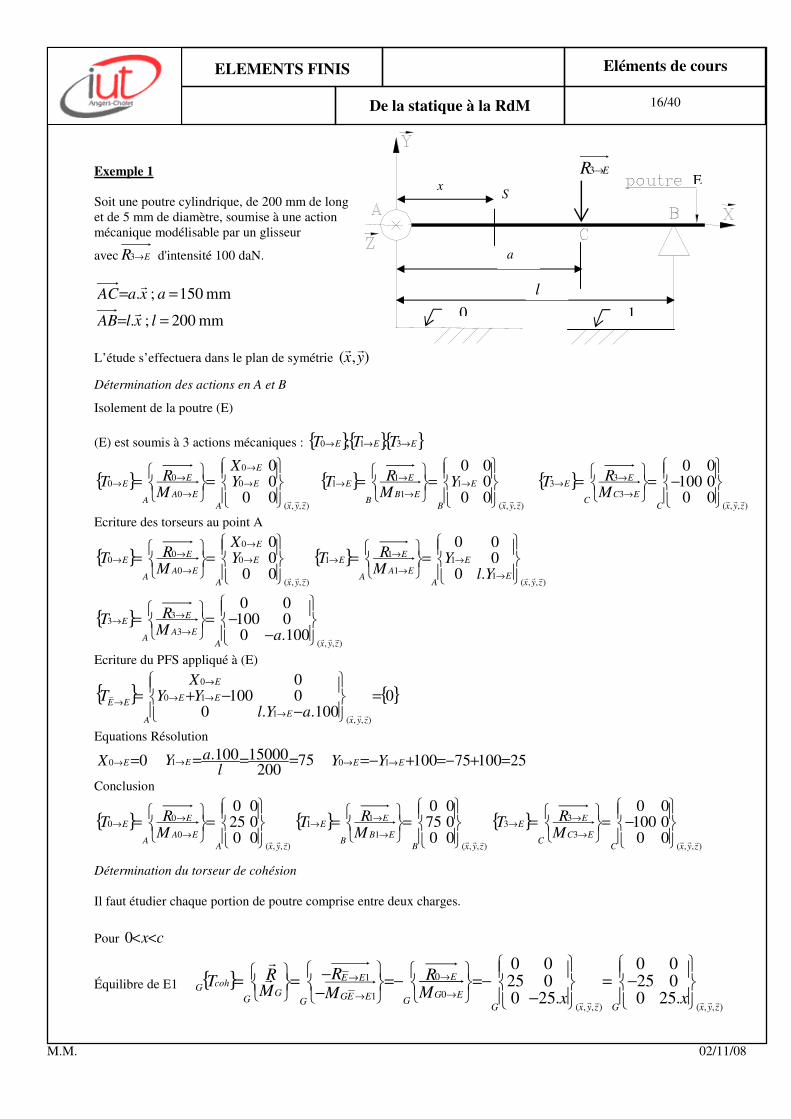
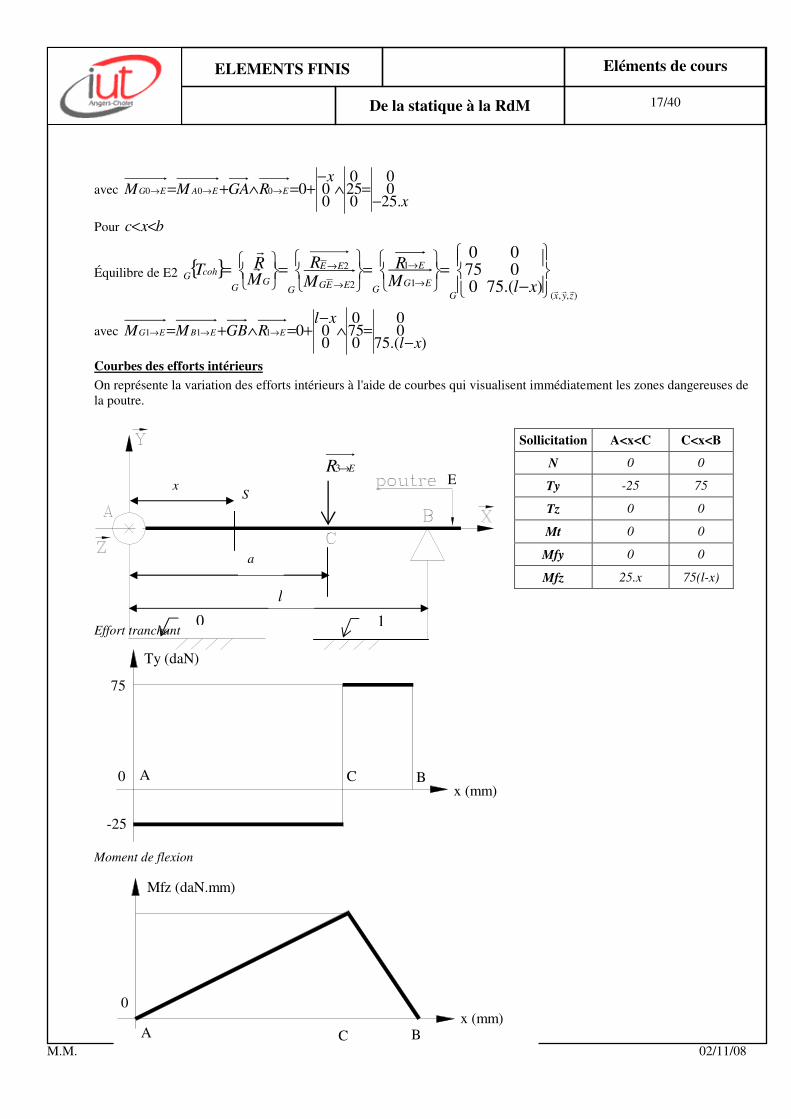
Exemple 1 Soit une poutre cylindrique, de 200 mm de long et de 5 mm de diamètre, soumise à une action mécanique modélisable par un glisseur
avec ER →3 d'intensité 100 daN.
mm 150 ; . == axaAC�
mm 200 ; . == lxlAB�
L’étude s’effectuera dans le plan de symétrie ),( yx
��
Détermination des actions en A et B
Isolement de la poutre (E) (E) est soumis à 3 actions mécaniques : { }{ }{ }EEE TTT →→→ 310 .;
{ }),,(
0
0
0
00
0000
zyx
E
E
AEA
E
A
E YX
MRT
�����
��
�
���
=��
��= →
→
→
→→ { }),,(
11
11
00000
zyx
E
BEB
E
B
E YMRT
�����
��
�
���
=��
��= →
→
→→ { }),,(
3
33
00010000
zyxCEC
E
C
EMRT
�����
��
�
���−=
��
��=
→
→→
Ecriture des torseurs au point A
{ }),,(
0
0
0
00
0000
zyx
E
E
AEA
E
A
E YX
MRT
�����
��
�
���
=��
��= →
→
→
→→ { }),,(
1
11
11
.0000
zyxE
E
AEA
E
A
E
YlY
MRT
�����
��
�
���
=��
��=
→
→→
→→
{ }),,(
3
33
100.0010000
zyxAEA
E
A
E
aMRT
�����
��
�
���
−−=
��
��=
→
→→
Ecriture du PFS appliqué à (E)
{ } { }0100..0
01000
),,(1
10
0
=��
��
�
���
−−+=
→
→→
→
→
zyxE
EE
E
A
EEaYl
YYX
T���
�
Equations Résolution
00 =→EX 7520015000100.
1 ===→l
aY E 251007510010 =+−=+−= →→ EE YY
Conclusion
{ }),,(
0
00
0002500
zyxAEA
E
A
EMRT
�����
��
�
���
=��
��=
→
→→ { }),,(
1
11
0007500
zyxBEB
E
B
EMRT
�����
��
�
���
=��
��=
→
→→ { }),,(
3
33
00010000
zyxCEC
E
C
EMRT
�����
��
�
���−=
��
��=
→
→→
Détermination du torseur de cohésion Il faut étudier chaque portion de poutre comprise entre deux charges.
Pour cx<<0
Équilibre de E1 { }),,(),,(
0
0
1
1
.25002500
.25002500
zyxGzyxGEG
E
GEEG
EE
GG
G
cohGxxM
RMR
MRT
������
�
�
��
��
�
���−=
��
��
�
���
−=−��
��=−
��
��−−=
��
��=
→
→
→
→
E ER →3
0 1 l
a
S x
M.M. 02/11/08
ELEMENTS FINIS
17/40
Eléments de cours
De la statique à la RdM
avec x
xRGAMM EEAEG
.2500
0250
000000
−=∧
−+=∧+= →→→
Pour bxc <<
Équilibre de E2 { }),,(
1
1
2
2
).(75007500
zyxGEG
E
GEEG
EE
GG
G
cohGxlM
RMR
MRT
���
�
�
��
��
�
���
−=��
��=
��
��=
��
��=
→
→
→
→
avec ).(75
00
0750
000111
xl
xlRGBMM EEBEG
−=∧
−+=∧+= →→→
Courbes des efforts intérieurs On représente la variation des efforts intérieurs à l'aide de courbes qui visualisent immédiatement les zones dangereuses de la poutre.
Effort tranchant
Moment de flexion
E ER →3
0 1
l
a
S x
Ty (daN)
x (mm)
75
-25
0 A C B
Mfz (daN.mm)
x (mm) 0
A C B
Sollicitation A<x<C C<x<B
N 0 0
Ty -25 75
Tz 0 0
Mt 0 0
Mfy 0 0
Mfz 25.x 75(l-x)
M.M. 02/11/08
ELEMENTS FINIS
18/40
Eléments de cours
De la statique à la RdM
Conclusion : Le torseur de cohésion est variable le long de la poutre Calculer la pente de Mf sur chaque partie de la courbe (réponse : 25daN et -75daN).
Existe-t-il un rapport entre la pente de la courbe et l'effort tranchant (réponse : oui dx
dMT fz
y −= ).
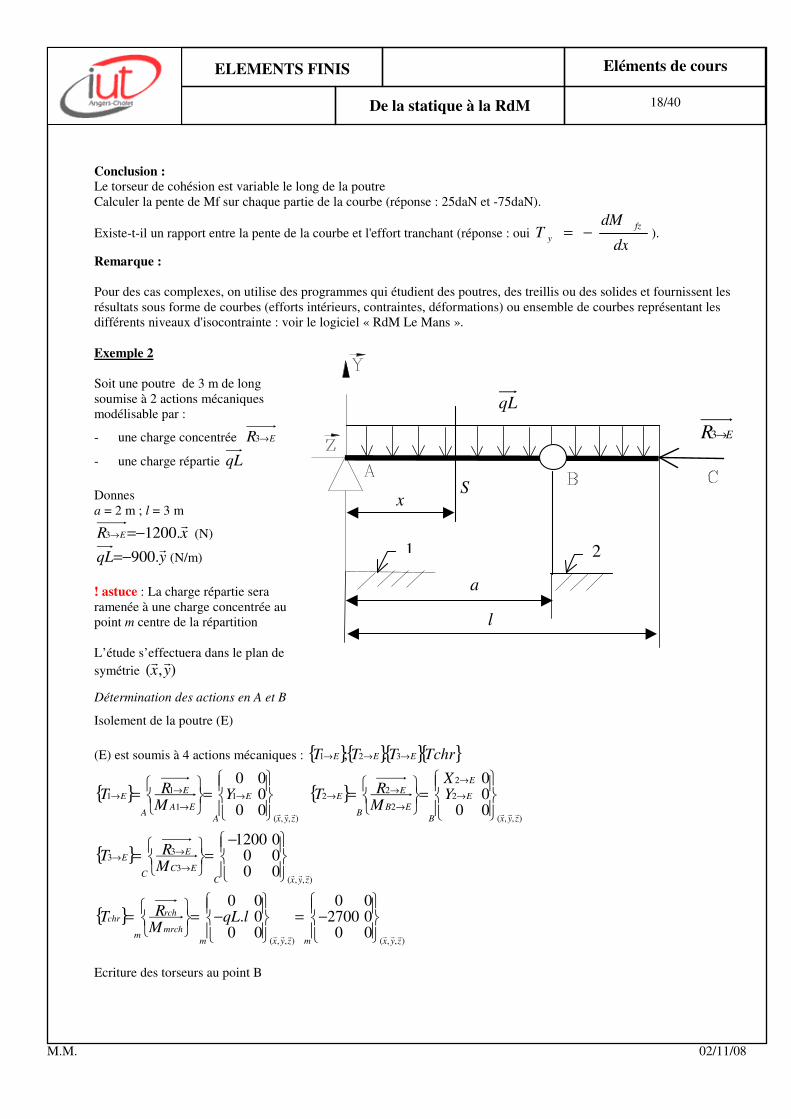
Remarque : Pour des cas complexes, on utilise des programmes qui étudient des poutres, des treillis ou des solides et fournissent les résultats sous forme de courbes (efforts intérieurs, contraintes, déformations) ou ensemble de courbes représentant les différents niveaux d'isocontrainte : voir le logiciel « RdM Le Mans ». Exemple 2 Soit une poutre de 3 m de long soumise à 2 actions mécaniques modélisable par :
- une charge concentrée ER →3
- une charge répartie qL Donnes a = 2 m ; l = 3 m
xR E�
.12003 −=→ (N)
yqL�
.900−= (N/m) ! astuce : La charge répartie sera ramenée à une charge concentrée au point m centre de la répartition L’étude s’effectuera dans le plan de symétrie ),( yx
��
Détermination des actions en A et B
Isolement de la poutre (E) (E) est soumis à 4 actions mécaniques : { }{ }{ }{ }TchrTTT EEE →→→ 321 .;
{ }),,(
11
11
00000
zyx
E
AEA
E
A
E YMRT
�����
��
�
���
=��
��= →
→
→→ { }),,(
2
2
2
22
0000
zyx
E
E
BEB
E
B
E YX
MRT
�����
��
�
���
=��
��= →
→
→
→→
{ }),,(
3
33
000001200
zyxCEC
E
C
EMRT
�����
��
�
���−
=��
��=
→
→→
{ }),,(),,(
000270000
000.00
zyxmzyxmmrch
rch
m
chr lqLMRT
������ ��
��
�
���−=
��
��
�
���−=
��
��=
Ecriture des torseurs au point B
ER →3
1 2
l
a
S x
qL

M.M. 02/11/08
ELEMENTS FINIS
19/40
Eléments de cours
De la statique à la RdM
{ }),,(
1
1
),,(1
11
11
.20000
.0000
zyxE
E
BzyxE
E
BEB
E
B
E
YY
YaY
MRT
������ ��
��
�
���
−=
��
��
�
���
−=��
��=
→
→
→
→→
→→
{ }),,(
2
2
2
22
0000
zyx
E
E
BEB
E
B
E YX
MRT
�����
��
�
���
=��
��= →
→
→
→→
{ }),,(
3
33
000001200
zyxBEB
E
B
EMRT
�����
��
�
���−
=��
��=
→
→→
{ }),,(
135000270000
zyxBBchr
chr
B
chrMRT
�����
��
�
���−=
��
��= avec m situe au milieu de AC
Ecriture du PFS appliqué à (E)
{ } { }01350.20
0270001200
),,(1
21
2
=��
��
�
���
+−−+
−=
→
→→
→
→
zyxE
EE
E
A
EEY
YYX
T���
�
Equations Résolution
12002 =→EX 675213501 ==→EY 20252700675270012 =+−=+−= →→ EE YY
Conclusion
{ }),,(
1
11
00067500
zyxAEA
E
A
EMRT
�����
��
�
���
=��
��=
→
→→ { }),,(
2
22
000202501200
zyxBEB
E
B
EMRT
�����
��
�
���
=��
��=
→
→→
{ }),,(
3
33
000001200
zyxCEC
E
C
EMRT
�����
��
�
���−
=��
��=
→
→→
{ }),,(),,(
000270000
000.00
zyxmzyxmmrch
rch
m
chr lqLMRT
������ ��
��
�
���−=
��
��
�
���−=
��
��=
Détermination des torseurs de cohésion Il faut étudier chaque portion de poutre comprise entre deux charges.
Pour BxA <<
Équilibre de E1 { } { } { } { })( 11 chrGEGEEGcohG TTTT +−==− →→
{ }),,(
1
11
.6750067500
zyxGEG
E
G
E
xMRT
�����
��
�
���
−=��
��=
→
→→ avec x
xRGAMM EEAEG
.67500
06750
000111
−=∧
−+=∧+= →→→

M.M. 02/11/08
ELEMENTS FINIS
20/40
Eléments de cours
De la statique à la RdM
{ }),,(
),,(
².45000.90000
2².0
0.00
zyxG
zyxG
Grch
rch
G
chr
xx
xqLxqL
MRT
���
���
��
��
�
���−=
���
���
��
���
�
−=��
��= avec
².45000
2².900
00
0.900
0
002
0xx
x
x
MGchr ==−∧−
+=
{ }),,(),,(),,(
1².450.6750
0.90067500
².45000.90000
.6750067500
zyxGzyxGzyxG
EExx
xx
xx
T��������� ��
��
�
���
+−−=
��
��
�
���−+
��
��
�
���
−=→
{ } { }),,(
1².450.6750
0.90067500
zyxG
EEcoh
xxxTT
�����
��
�
���
−+−=−= →
Pour CxB <<
Équilibre de E2 { } { } { } { }chrGEGEEGcohG TTTT +== →→ 32
{ }),,(
3
33
000001200
zyxGEG
E
G
EMRT
�����
��
�
���−
=��
��=
→
→→ avec 000
00
1200
000313 =
−∧
−+=∧+= →→→
xlRGCMM EECEG
{ }),,(
),,(
)²3(45000)3.(90000
)).().(2(00).(00
zyxGzyxG
Grch
rch
G
chr
xx
xlqLxlxlqL
MRT
���
���
��
��
�
���
−−−−=
��
��
�
��
�
−−−−−=
��
��= avec
2)²(
00
2))()((
00
)(.2
00
0).(
0
002
0xlqLxlqLxlxlqLxl
xlqL
xl
MGchr−−
=−−−
=−−−
=−−∧
−
+=
{ } { }),,(),,(),,(
2)²3.(4500
0)3.(90001200
)²3.(45000)3.(90000
000001200
zyxGzyxGzyxG
EEcoh
xx
xxTT
��������� ��
��
�
���
−−
−=
��
��
�
���
−−+
��
��
�
���−
== →
M.M. 02/11/08
ELEMENTS FINIS
21/40
Eléments de cours
De la statique à la RdM
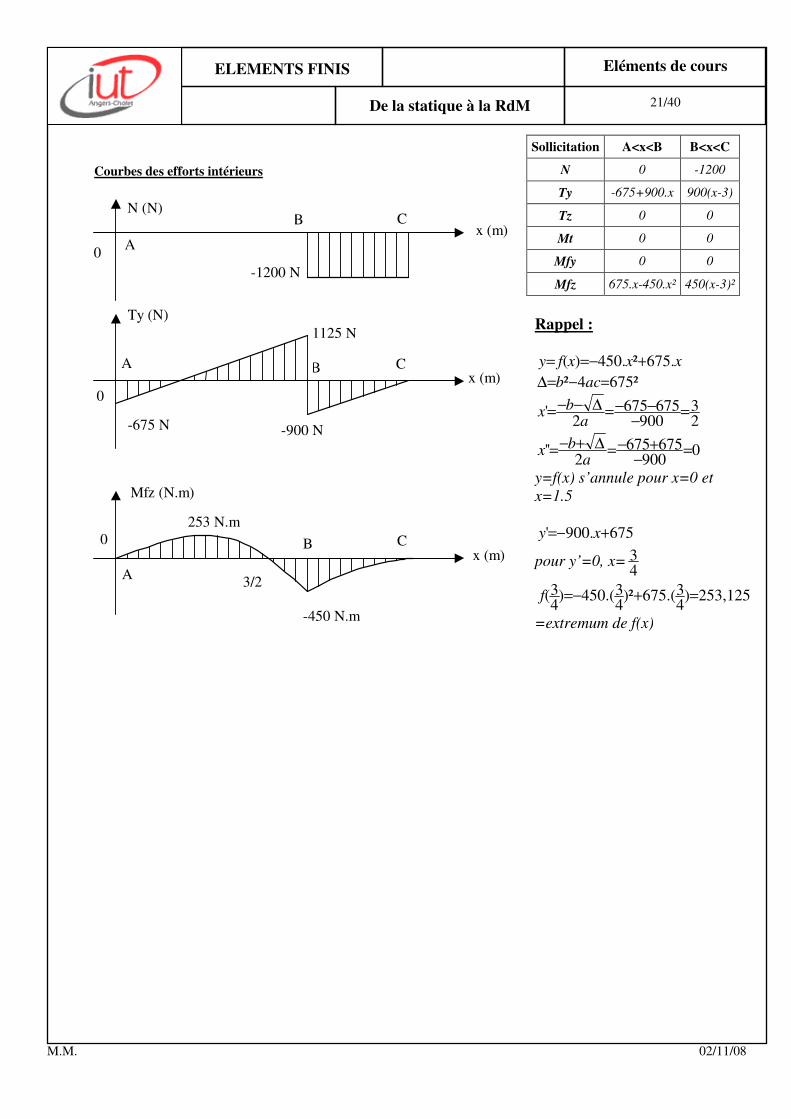
Courbes des efforts intérieurs
Les différents types de sollicitation
Sollicitation A<x<B B<x<C
N 0 -1200
Ty -675+900.x 900(x-3)
Tz 0 0
Mt 0 0
Mfy 0 0
Mfz 675.x-450.x² 450(x-3)²
N (N)
0 A
B C x (m)
-1200 N
x (m) 0
Ty (N)
A B C
-675 N
1125 N
-900 N
x (m)
Mfz (N.m)
0
A
C B 253 N.m
-450 N.m
3/2
Rappel :
xxxfy .675².450)( +−== ²6754² =−=∆ acb
23
900675675
2' =−−−=∆−−=
abx
0900675675
2'' =−+−=∆+−=
abx
y=f(x) s’annule pour x=0 et x=1.5
675.900' +−= xy
pour y’=0, x= 43
125,253)43.(675)²4
3.(450)43( =+−=f
=extremum de f(x)
M.M. 02/11/08
ELEMENTS FINIS
22/40
Eléments de cours
De la statique à la RdM
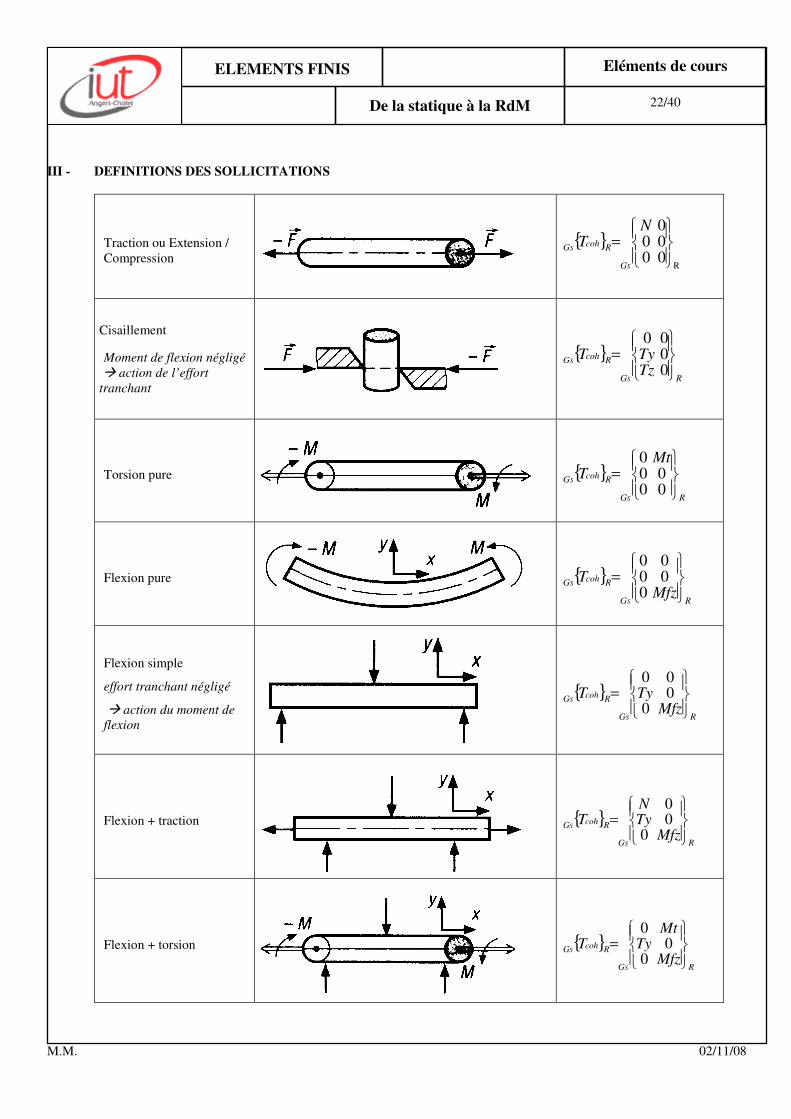
III - DEFINITIONS DES SOLLICITATIONS
Traction ou Extension / Compression
{ }R
00000
��
��
�
���
=N
TS
S
G
RcohG
Cisaillement
Moment de flexion négligé � action de l’effort tranchant
{ }RG
RcohGTzTyT
S
S
��
��
�
���
=0000
Torsion pure
{ }RG
RcohG
MtT
S
S
��
��
�
���
=0000
0
Flexion pure
{ }RG
RcohGMfz
TS
S
��
��
�
���
=0
0000
Flexion simple
effort tranchant négligé
� action du moment de flexion
{ }RG
RcohGMfz
TyTS
S
��
��
�
���
=0
000
Flexion + traction
{ }RG
RcohGMfz
TyN
TS
S
��
��
�
���
=0
00
Flexion + torsion
{ }RG
RcohGMfz
TyMt
TS
S
��
��
�
���
=0
00
M.M. 02/11/08
ELEMENTS FINIS
23/40
Eléments de cours
De la statique à la RdM
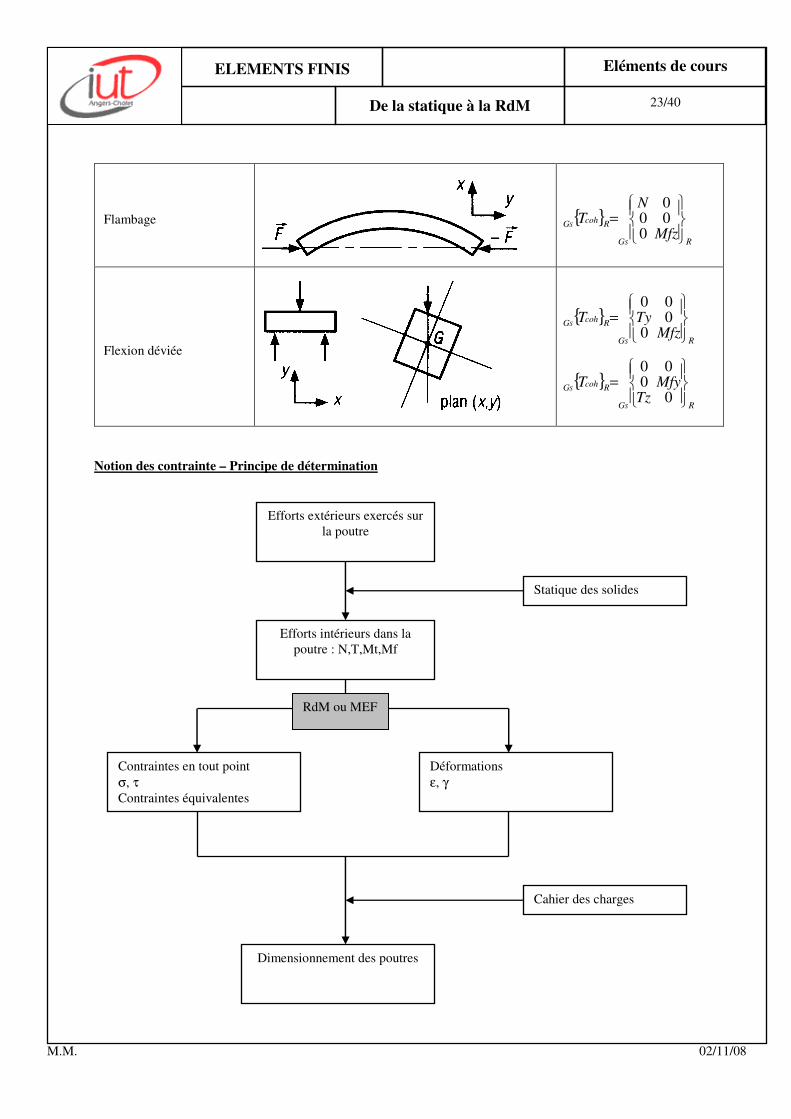
Flambage
{ }RG
RcohGMfz
NT
S
S
��
��
�
���
=0
000
Flexion déviée
{ }RG
RcohGMfz
TyTS
S
��
��
�
���
=0
000
{ }RG
RcohGTz
MfyTS
S
��
��
�
���
=0
000
Notion des contrainte – Principe de détermination
Statique des solides
Efforts extérieurs exercés sur la poutre
Efforts intérieurs dans la poutre : N,T,Mt,Mf
Contraintes en tout point σ, τ Contraintes équivalentes
Déformations ε, γ
Dimensionnement des poutres
Cahier des charges
RdM ou MEF
M.M. 02/11/08
ELEMENTS FINIS
24/40
Eléments de cours
De la statique à la RdM
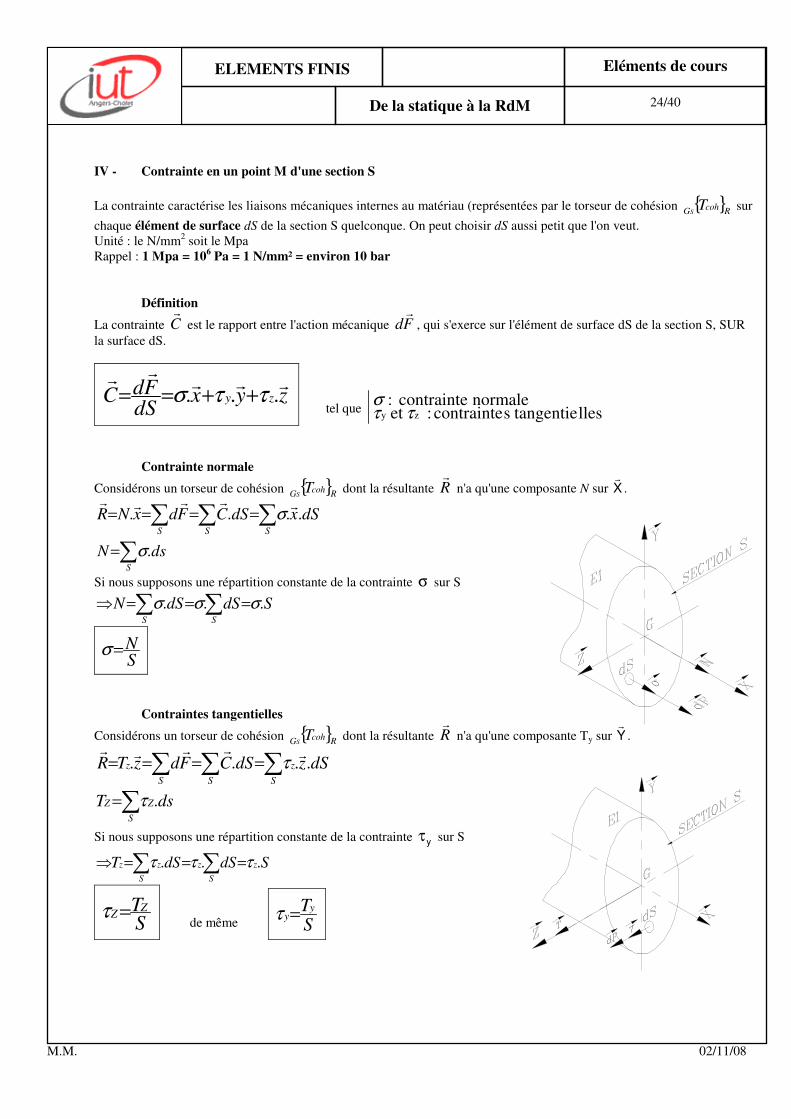
IV - Contrainte en un point M d'une section S
La contrainte caractérise les liaisons mécaniques internes au matériau (représentées par le torseur de cohésion { }RcohG TS
sur chaque élément de surface dS de la section S quelconque. On peut choisir dS aussi petit que l'on veut. Unité : le N/mm2 soit le Mpa Rappel : 1 Mpa = 106 Pa = 1 N/mm² = environ 10 bar
Définition
La contrainte C�
est le rapport entre l'action mécanique Fd�
, qui s'exerce sur l'élément de surface dS de la section S, SUR la surface dS.
zyxdSFdC zy
�����
... ττσ ++== tel que lles tangentiescontrainte : et
normale contrainte : zy ττ
σ
Contrainte normale
Considérons un torseur de cohésion { }RcohG TS
dont la résultante R�
n'a qu'une composante N sur �X .
��� ====SSS
dSxdSCFdxNR ....�����
σ
�=S
dsN .σ
Si nous supposons une répartition constante de la contrainte σ sur S
SdSdSNSS
... σσσ === ��
SN=σ
Contraintes tangentielles
Considérons un torseur de cohésion { }RcohG TS
dont la résultante R�
n'a qu'une composante Ty sur �Y .
��� ====S
z
SS
z dSzdSCFdzTR ....�����
τ
�=S
ZZ dsT .τ
Si nous supposons une répartition constante de la contrainte yτ sur S
SdSdST z
S
z
S
zz ... τττ === ��
STZZ =τ
de même STy
y=τ

M.M. 02/11/08
ELEMENTS FINIS
25/40
Eléments de cours
De la statique à la RdM
Relations entre torseur de cohésion et contraintes
( )dSTNRS
zyEE .21 � ++=+=→ ττσ ����� ou ( )STNR zyEE .21 ττσ �����
++=+=→
( )dSGMMS
zyG EE .2/1 � ++∧= ττσ ���
Notions sur les coefficients de sécurité Pour qu’une structure (machine, véhicule…) puisse supporter en toute sécurité les charges normalement la sollicitent, il suffit qu’elle puisse résister à des charges plus élevées. La capacité à supporter ces charges constitue la résistance de la structure. Le coefficient de sécurité s est
nécessaire résistance réelle résistance
exercées charges admissible charge
s ==
La sécurité est obtenue si, sous charge
� les déformations du matériau restent élastiques, � la rupture du matériau n’est pas atteinte.
donc
pratique résistanceélastique résistance Rp
Re s == ou pratique résistancerupture la à résistance Rp
Rr s ==
Nota : On confondra les deux notations : limite élastique eR (notation « française » pour résistance élastique) ou
eσ (notation internationale).

M.M. 02/11/08
ELEMENTS FINIS
26/40
Eléments de cours
De la statique à la RdM
V - TRACTION/COMPRESSION Ces deux sollicitations simples sont distinctes et un certain nombre de matériaux ont un comportement différent en extension et en compression (par exemple, la fonte grise Ft20 a pour contrainte limite élastique en extension 20 MPa et pour contrainte limite élastique en compression 150 MPa). Cependant dans les deux cas nous arriverons aux mêmes relations de contraintes et de déformations. Dans un grand nombre d'applications l’une de ces sollicitations sur une pièce entraîne l'autre sollicitation sur la pièce qui assure la liaison (immobilisation de deux pièces par vis, boulons ou goujons). Dans le repère (G, X, y, z) lié à la section, extension et compression se différencieront par le signe de l'effort normal N > 0 extension, N < 0 compression. Définitions : Une poutre est sollicitée à l'extension simple lorsqu'elle est soumise à deux forces directement opposées qui tendent à l'allonger et appliquées au centre de la surface des sections extrêmes. Dans le repère ),,,( zyxGR
���= de définition des sollicitations :
{ } { }),,,(
12
000000
zyxGGGG
coh
N
M
REET
�����
��
�
��
� �
=��
��
�
���
=→=
Une poutre "courte" (attention au flambage) est sollicitée à la compression simple lorsqu'elle est soumise à deux forces directement opposées qui tendent à la raccourcir et appliquées au centre de la surface des sections extrêmes. Dans le repère ),,,( zyxGR
���= de définition des sollicitations :
{ } { }),,,(
12
000000
zyxGGGG
coh
N
M
REET
�����
��
�
��
� �
=��
��
�
���
=→=
Contraintes : Dans les deux sollicitations, extension et compression, elles s'expriment de la même façon : (Sous l’hypothèse d’une répartition uniforme des contraintes)
SN=σ
Extension : N>0, σ>0 Compression : N<0, σ<0
Conditions de résistance : Pour des raisons de sécurité, la contrainte normale σ doit rester inférieure à une valeur limite appelée contrainte pratique à l’extension ou à la compression.
peσ ou pcσ est obtenu en divisant la limite élastique Re par un coefficient de sécurité s :
En extension : peσσ ≤ ou peSN σ≤
Avec : σ = contrainte normale en Mpa N = effort normal en N S = aire d la section droite en mm²
sp Re=σ
M.M. 02/11/08
ELEMENTS FINIS
27/40
Eléments de cours
De la statique à la RdM
avec peσ =contrainte pratique à l'extension
En compression : pcσσ ≤ ou pcS
N σ≤
avec pcσ =contrainte pratique à la compression
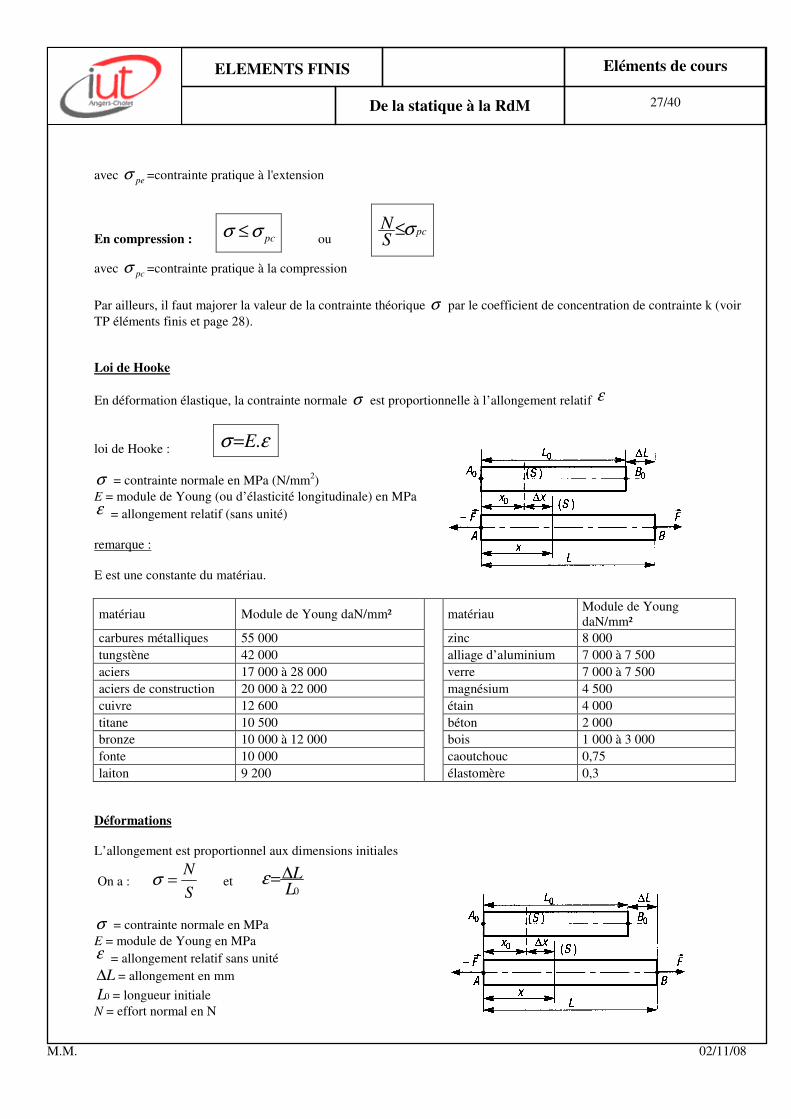
Par ailleurs, il faut majorer la valeur de la contrainte théorique σ par le coefficient de concentration de contrainte k (voir TP éléments finis et page 28). Loi de Hooke En déformation élastique, la contrainte normale σ est proportionnelle à l’allongement relatif ε
loi de Hooke : εσ .E= σ = contrainte normale en MPa (N/mm2) E = module de Young (ou d’élasticité longitudinale) en MPa ε = allongement relatif (sans unité) remarque : E est une constante du matériau.
matériau Module de Young daN/mm² matériau Module de Young daN/mm²
carbures métalliques 55 000 zinc 8 000 tungstène 42 000 alliage d’aluminium 7 000 à 7 500 aciers 17 000 à 28 000 verre 7 000 à 7 500 aciers de construction 20 000 à 22 000 magnésium 4 500 cuivre 12 600 étain 4 000 titane 10 500 béton 2 000 bronze 10 000 à 12 000 bois 1 000 à 3 000 fonte 10 000 caoutchouc 0,75 laiton 9 200
élastomère 0,3 Déformations
L’allongement est proportionnel aux dimensions initiales
On a : SN=σ et
0LL∆=ε
σ = contrainte normale en MPa E = module de Young en MPa ε = allongement relatif sans unité
L∆ = allongement en mm 0L = longueur initiale
N = effort normal en N
02/11/08
ELEMENTS FINIS
28/40
Eléments de cours
De la statique à la RdM
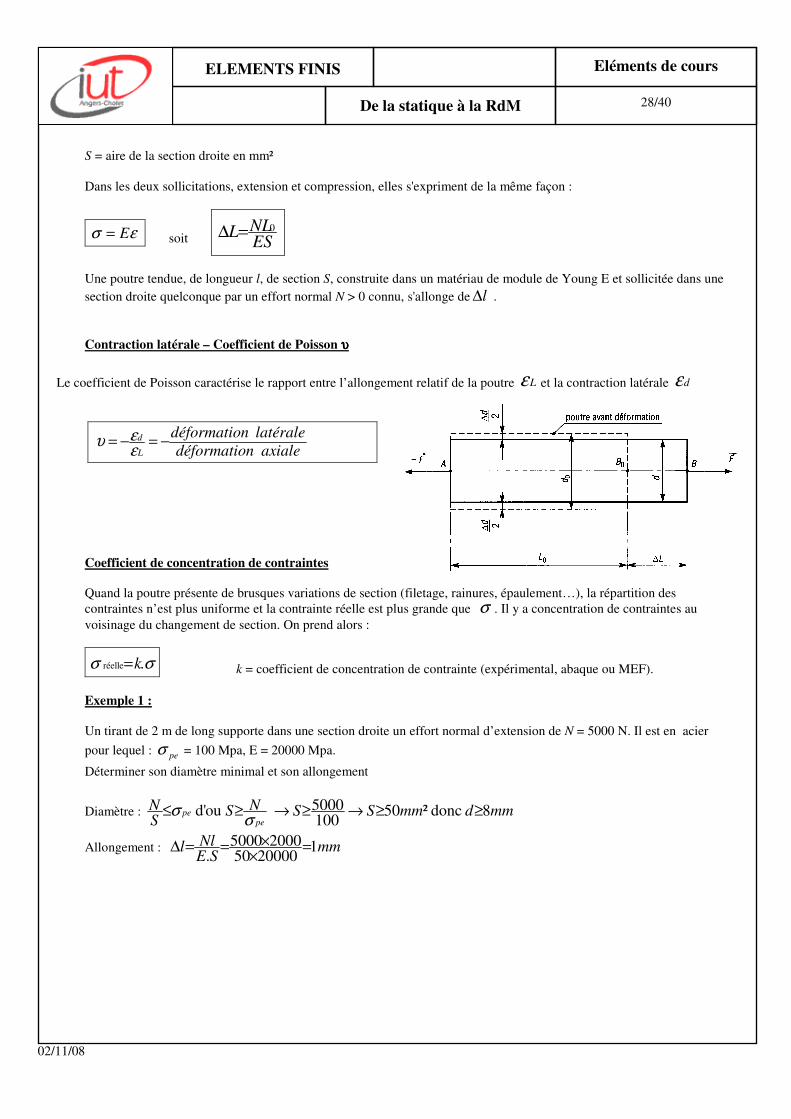
S = aire de la section droite en mm² Dans les deux sollicitations, extension et compression, elles s'expriment de la même façon :
εσ E= soit ESNLL 0=∆
Une poutre tendue, de longueur l, de section S, construite dans un matériau de module de Young E et sollicitée dans une section droite quelconque par un effort normal N > 0 connu, s'allonge de l∆ . Contraction latérale – Coefficient de Poisson υυυυ
Le coefficient de Poisson caractérise le rapport entre l’allongement relatif de la poutre Lε et la contraction latérale dε
axialendéformatiolatéralendéformatio
L
d
−=−= ε
ευ
Coefficient de concentration de contraintes Quand la poutre présente de brusques variations de section (filetage, rainures, épaulement…), la répartition des contraintes n’est plus uniforme et la contrainte réelle est plus grande que σ . Il y a concentration de contraintes au voisinage du changement de section. On prend alors :
σσ . réelle k= k = coefficient de concentration de contrainte (expérimental, abaque ou MEF). Exemple 1 : Un tirant de 2 m de long supporte dans une section droite un effort normal d’extension de N = 5000 N. Il est en acier pour lequel : peσ = 100 Mpa, E = 20000 Mpa.
Déterminer son diamètre minimal et son allongement
Diamètre : mmdmmSSNSSN
pepe 8 donc ²50
1005000 ou d' ≥≥→≥→≥≤ σσ
Allongement : mmSE
Nll 1200005020005000
. =××==∆
02/11/08
ELEMENTS FINIS
29/40
Eléments de cours
De la statique à la RdM
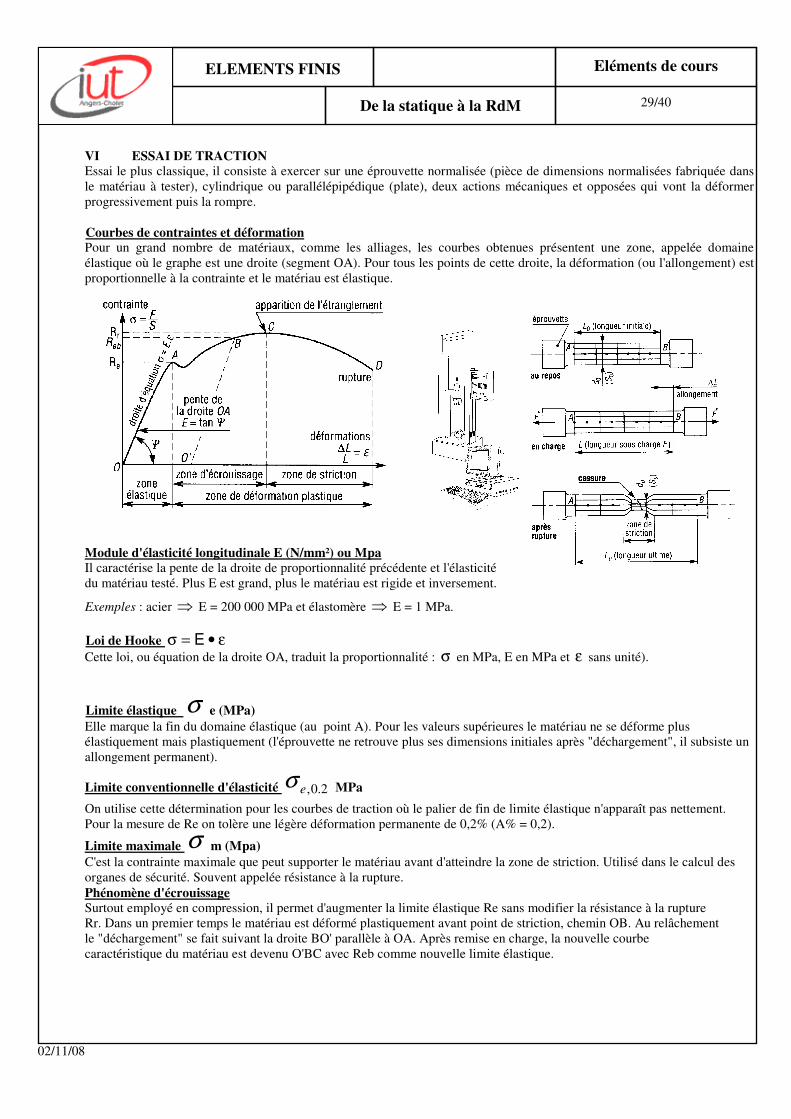
VI ESSAI DE TRACTION Essai le plus classique, il consiste à exercer sur une éprouvette normalisée (pièce de dimensions normalisées fabriquée dans le matériau à tester), cylindrique ou parallélépipédique (plate), deux actions mécaniques et opposées qui vont la déformer progressivement puis la rompre.
Courbes de contraintes et déformation Pour un grand nombre de matériaux, comme les alliages, les courbes obtenues présentent une zone, appelée domaine élastique où le graphe est une droite (segment OA). Pour tous les points de cette droite, la déformation (ou l'allongement) est proportionnelle à la contrainte et le matériau est élastique.
Module d'élasticité longitudinale E (N/mm²) ou Mpa Il caractérise la pente de la droite de proportionnalité précédente et l'élasticité du matériau testé. Plus E est grand, plus le matériau est rigide et inversement.
Exemples : acier E = 200 000 MPa et élastomère E = 1 MPa. Loi de Hooke ε•=σ E Cette loi, ou équation de la droite OA, traduit la proportionnalité : σ en MPa, E en MPa et ε sans unité).
Limite élastique σ e (MPa) Elle marque la fin du domaine élastique (au point A). Pour les valeurs supérieures le matériau ne se déforme plus élastiquement mais plastiquement (l'éprouvette ne retrouve plus ses dimensions initiales après "déchargement", il subsiste un allongement permanent).
Limite conventionnelle d'élasticité 2.0,eσ MPa On utilise cette détermination pour les courbes de traction où le palier de fin de limite élastique n'apparaît pas nettement. Pour la mesure de Re on tolère une légère déformation permanente de 0,2% (A% = 0,2).
Limite maximale σ m (Mpa) C'est la contrainte maximale que peut supporter le matériau avant d'atteindre la zone de striction. Utilisé dans le calcul des organes de sécurité. Souvent appelée résistance à la rupture. Phénomène d'écrouissage Surtout employé en compression, il permet d'augmenter la limite élastique Re sans modifier la résistance à la rupture Rr. Dans un premier temps le matériau est déformé plastiquement avant point de striction, chemin OB. Au relâchement le "déchargement" se fait suivant la droite BO' parallèle à OA. Après remise en charge, la nouvelle courbe caractéristique du matériau est devenu O'BC avec Reb comme nouvelle limite élastique.
02/11/08
ELEMENTS FINIS
30/40
Eléments de cours
De la statique à la RdM
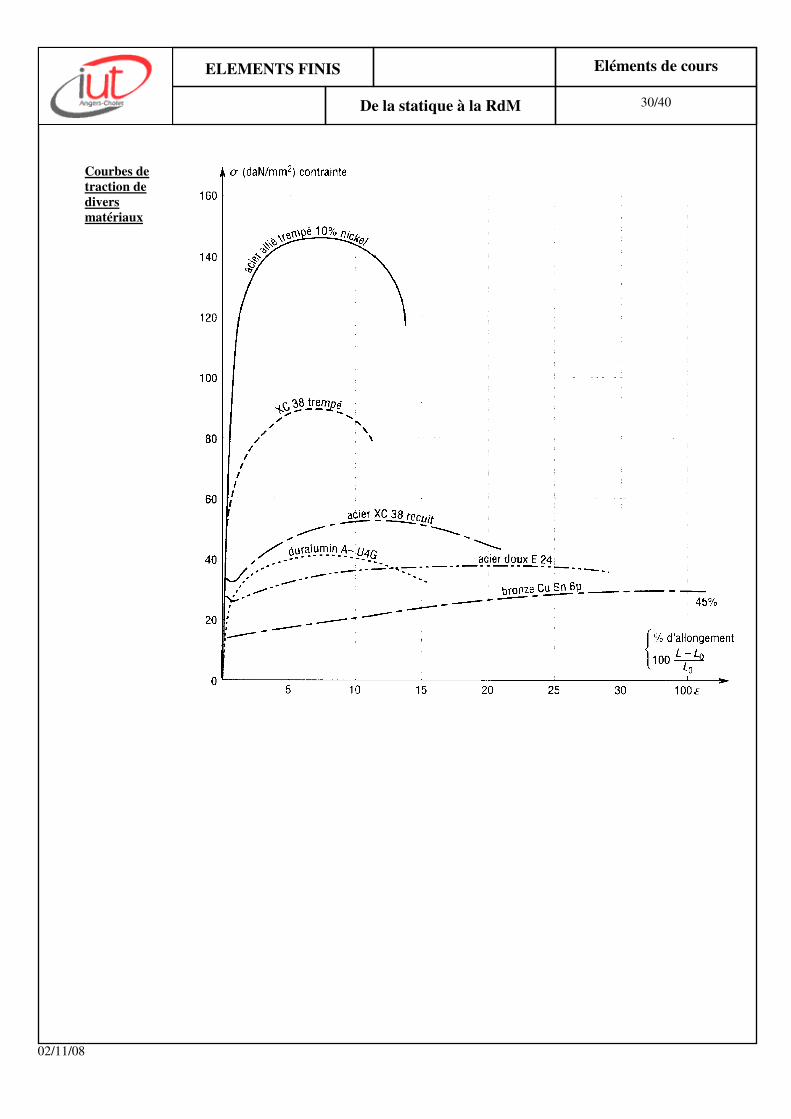
Courbes de traction de divers matériaux
02/11/08
ELEMENTS FINIS
31/40
Eléments de cours
De la statique à la RdM
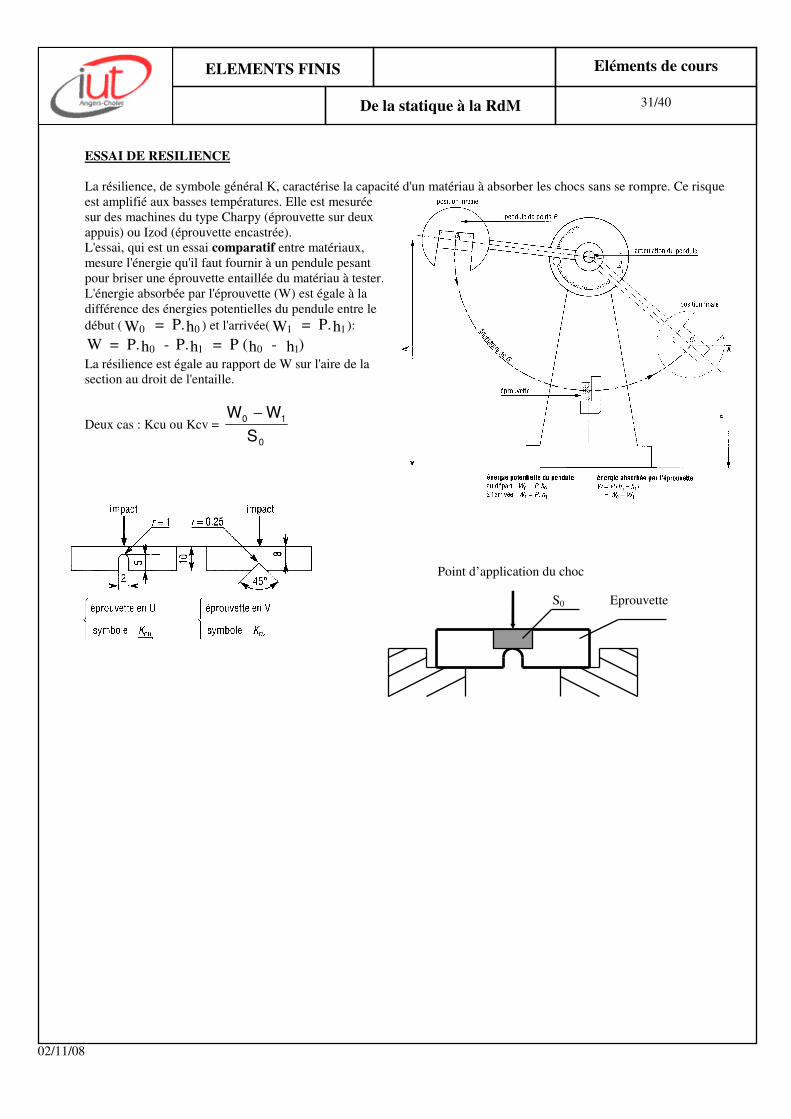
ESSAI DE RESILIENCE
La résilience, de symbole général K, caractérise la capacité d'un matériau à absorber les chocs sans se rompre. Ce risque est amplifié aux basses températures. Elle est mesurée sur des machines du type Charpy (éprouvette sur deux appuis) ou Izod (éprouvette encastrée). L'essai, qui est un essai comparatif entre matériaux, mesure l'énergie qu'il faut fournir à un pendule pesant pour briser une éprouvette entaillée du matériau à tester. L'énergie absorbée par l'éprouvette (W) est égale à la différence des énergies potentielles du pendule entre le début ( 0 0W = P.h ) et l'arrivée( 1 1W = P.h ): W = P.h - P.h = P (h - h )0 1 0 1 La résilience est égale au rapport de W sur l'aire de la section au droit de l'entaille.
Deux cas : Kcu ou Kcv = 0
10
SWW −
Eprouvette
Point d’application du choc
S0
02/11/08
ELEMENTS FINIS
32/40
Eléments de cours
De la statique à la RdM
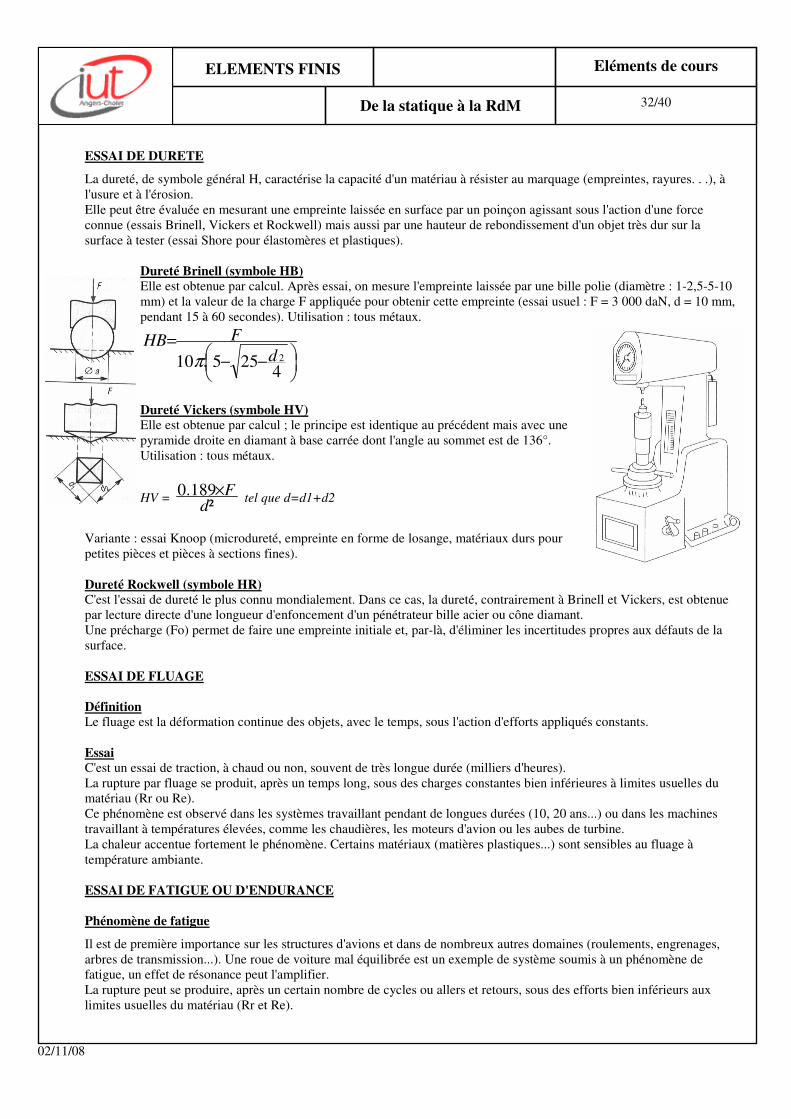
ESSAI DE DURETE
La dureté, de symbole général H, caractérise la capacité d'un matériau à résister au marquage (empreintes, rayures. . .), à l'usure et à l'érosion. Elle peut être évaluée en mesurant une empreinte laissée en surface par un poinçon agissant sous l'action d'une force connue (essais Brinell, Vickers et Rockwell) mais aussi par une hauteur de rebondissement d'un objet très dur sur la surface à tester (essai Shore pour élastomères et plastiques).
Dureté Brinell (symbole HB) Elle est obtenue par calcul. Après essai, on mesure l'empreinte laissée par une bille polie (diamètre : 1-2,5-5-10 mm) et la valeur de la charge F appliquée pour obtenir cette empreinte (essai usuel : F = 3 000 daN, d = 10 mm, pendant 15 à 60 secondes). Utilisation : tous métaux.
���
��� −−
=
4255.10 2dFHB
π
Dureté Vickers (symbole HV) Elle est obtenue par calcul ; le principe est identique au précédent mais avec une pyramide droite en diamant à base carrée dont l'angle au sommet est de 136°. Utilisation : tous métaux.
HV = ²189.0
dF× tel que d=d1+d2
Variante : essai Knoop (microdureté, empreinte en forme de losange, matériaux durs pour petites pièces et pièces à sections fines). Dureté Rockwell (symbole HR) C'est l'essai de dureté le plus connu mondialement. Dans ce cas, la dureté, contrairement à Brinell et Vickers, est obtenue par lecture directe d'une longueur d'enfoncement d'un pénétrateur bille acier ou cône diamant. Une précharge (Fo) permet de faire une empreinte initiale et, par-là, d'éliminer les incertitudes propres aux défauts de la surface. ESSAI DE FLUAGE Définition Le fluage est la déformation continue des objets, avec le temps, sous l'action d'efforts appliqués constants. Essai C'est un essai de traction, à chaud ou non, souvent de très longue durée (milliers d'heures). La rupture par fluage se produit, après un temps long, sous des charges constantes bien inférieures à limites usuelles du matériau (Rr ou Re). Ce phénomène est observé dans les systèmes travaillant pendant de longues durées (10, 20 ans...) ou dans les machines travaillant à températures élevées, comme les chaudières, les moteurs d'avion ou les aubes de turbine. La chaleur accentue fortement le phénomène. Certains matériaux (matières plastiques...) sont sensibles au fluage à température ambiante. ESSAI DE FATIGUE OU D'ENDURANCE Phénomène de fatigue
Il est de première importance sur les structures d'avions et dans de nombreux autres domaines (roulements, engrenages, arbres de transmission...). Une roue de voiture mal équilibrée est un exemple de système soumis à un phénomène de fatigue, un effet de résonance peut l'amplifier. La rupture peut se produire, après un certain nombre de cycles ou allers et retours, sous des efforts bien inférieurs aux limites usuelles du matériau (Rr et Re).
02/11/08
ELEMENTS FINIS
33/40
Eléments de cours
De la statique à la RdM
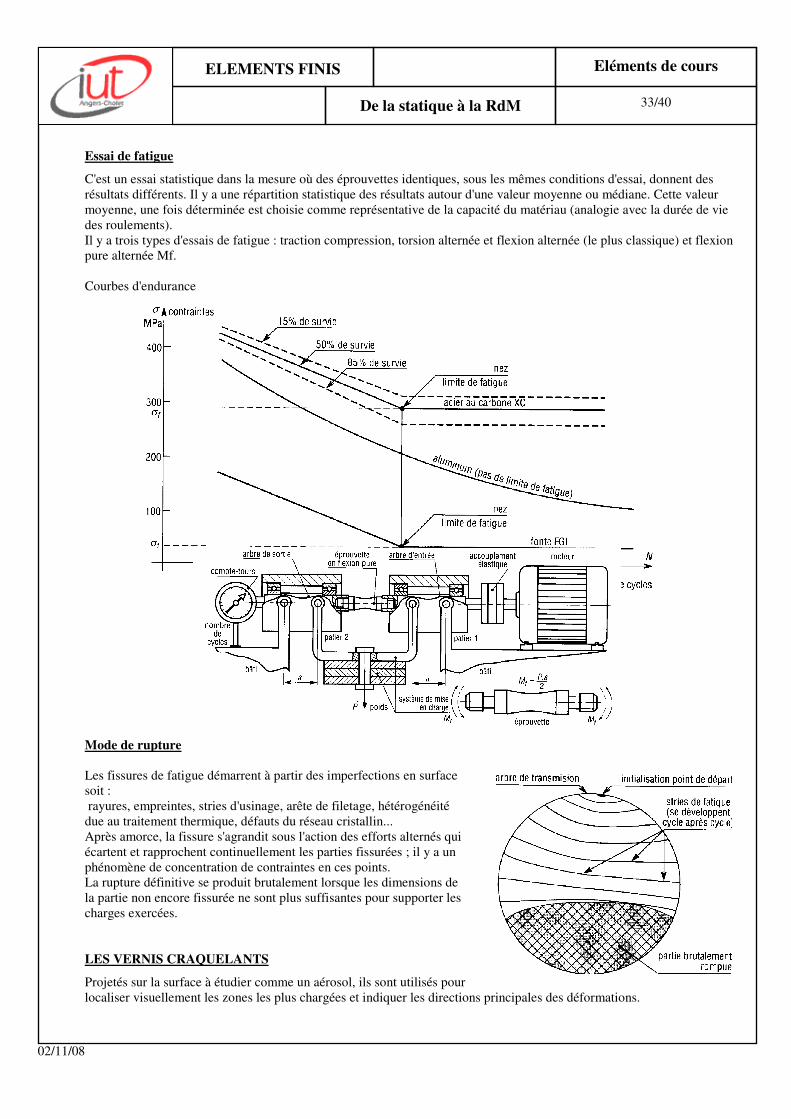
Essai de fatigue
C'est un essai statistique dans la mesure où des éprouvettes identiques, sous les mêmes conditions d'essai, donnent des résultats différents. Il y a une répartition statistique des résultats autour d'une valeur moyenne ou médiane. Cette valeur moyenne, une fois déterminée est choisie comme représentative de la capacité du matériau (analogie avec la durée de vie des roulements). Il y a trois types d'essais de fatigue : traction compression, torsion alternée et flexion alternée (le plus classique) et flexion pure alternée Mf. Courbes d'endurance
Mode de rupture Les fissures de fatigue démarrent à partir des imperfections en surface soit : rayures, empreintes, stries d'usinage, arête de filetage, hétérogénéité due au traitement thermique, défauts du réseau cristallin... Après amorce, la fissure s'agrandit sous l'action des efforts alternés qui écartent et rapprochent continuellement les parties fissurées ; il y a un phénomène de concentration de contraintes en ces points. La rupture définitive se produit brutalement lorsque les dimensions de la partie non encore fissurée ne sont plus suffisantes pour supporter les charges exercées. LES VERNIS CRAQUELANTS
Projetés sur la surface à étudier comme un aérosol, ils sont utilisés pour localiser visuellement les zones les plus chargées et indiquer les directions principales des déformations.
02/11/08
ELEMENTS FINIS
34/40
Eléments de cours
De la statique à la RdM
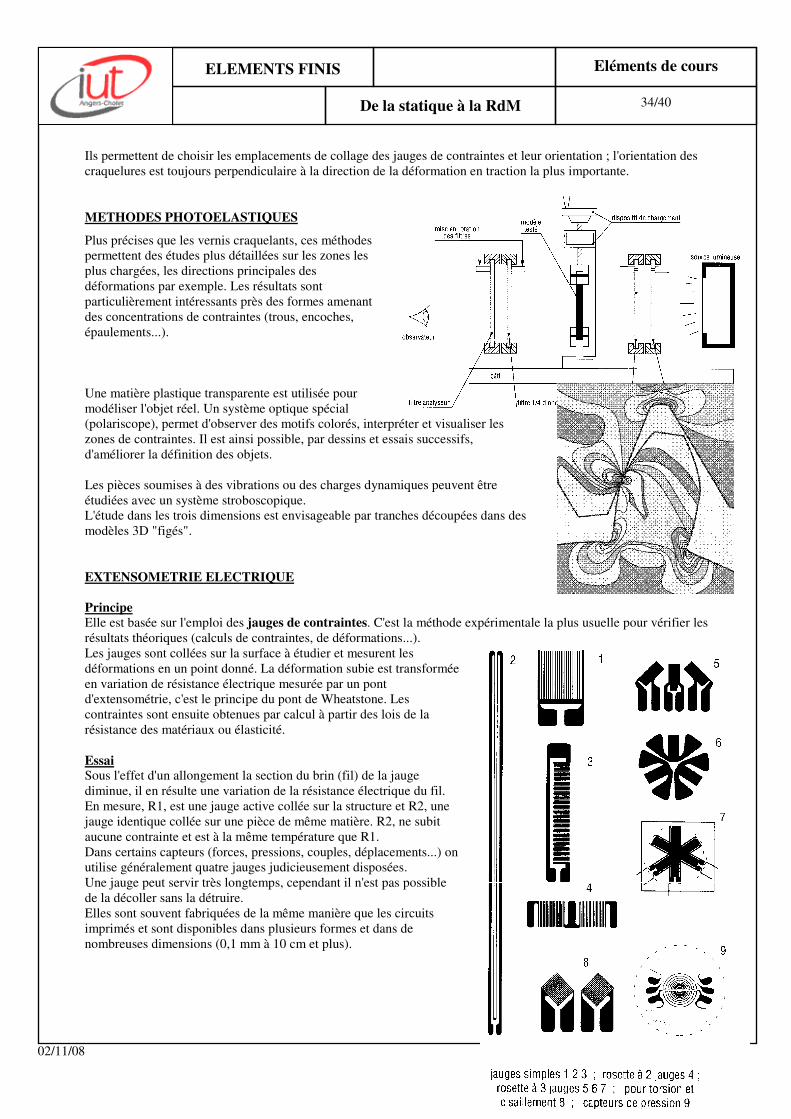
Ils permettent de choisir les emplacements de collage des jauges de contraintes et leur orientation ; l'orientation des craquelures est toujours perpendiculaire à la direction de la déformation en traction la plus importante. METHODES PHOTOELASTIQUES
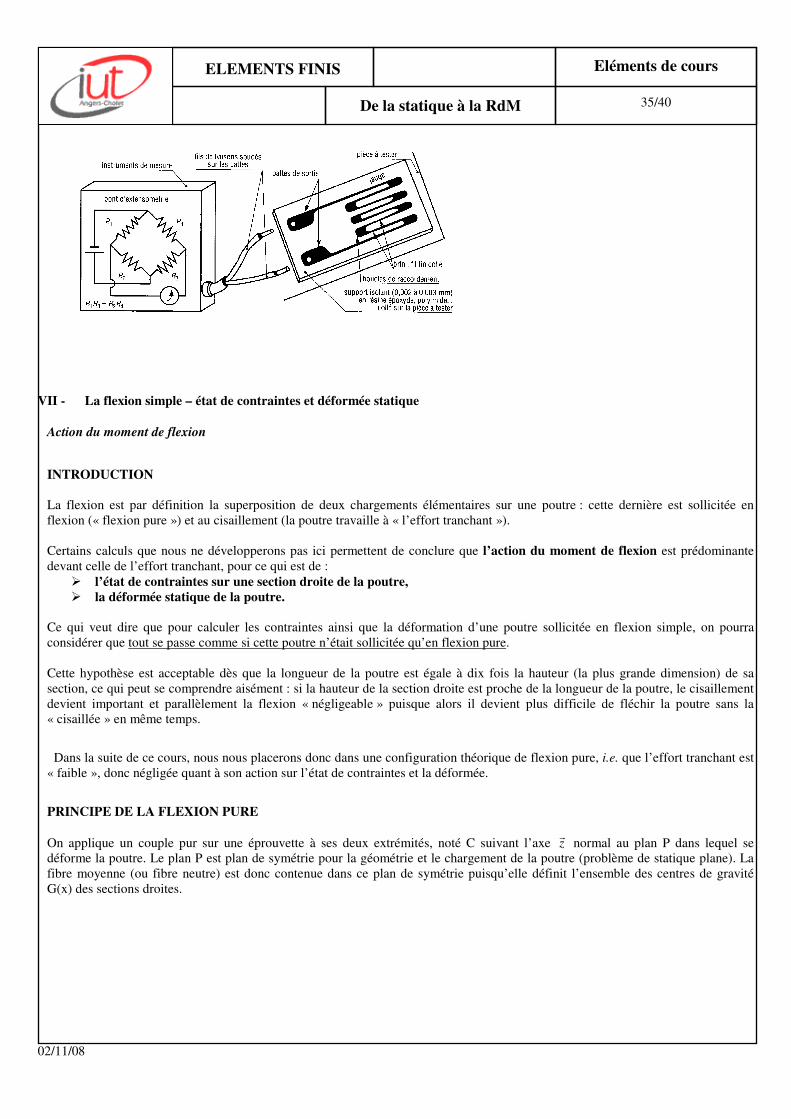
Plus précises que les vernis craquelants, ces méthodes permettent des études plus détaillées sur les zones les plus chargées, les directions principales des déformations par exemple. Les résultats sont particulièrement intéressants près des formes amenant des concentrations de contraintes (trous, encoches, épaulements...). Une matière plastique transparente est utilisée pour modéliser l'objet réel. Un système optique spécial (polariscope), permet d'observer des motifs colorés, interpréter et visualiser les zones de contraintes. Il est ainsi possible, par dessins et essais successifs, d'améliorer la définition des objets. Les pièces soumises à des vibrations ou des charges dynamiques peuvent être étudiées avec un système stroboscopique. L'étude dans les trois dimensions est envisageable par tranches découpées dans des modèles 3D "figés". EXTENSOMETRIE ELECTRIQUE Principe Elle est basée sur l'emploi des jauges de contraintes. C'est la méthode expérimentale la plus usuelle pour vérifier les résultats théoriques (calculs de contraintes, de déformations...). Les jauges sont collées sur la surface à étudier et mesurent les déformations en un point donné. La déformation subie est transformée en variation de résistance électrique mesurée par un pont d'extensométrie, c'est le principe du pont de Wheatstone. Les contraintes sont ensuite obtenues par calcul à partir des lois de la résistance des matériaux ou élasticité. Essai Sous l'effet d'un allongement la section du brin (fil) de la jauge diminue, il en résulte une variation de la résistance électrique du fil. En mesure, R1, est une jauge active collée sur la structure et R2, une jauge identique collée sur une pièce de même matière. R2, ne subit aucune contrainte et est à la même température que R1. Dans certains capteurs (forces, pressions, couples, déplacements...) on utilise généralement quatre jauges judicieusement disposées. Une jauge peut servir très longtemps, cependant il n'est pas possible de la décoller sans la détruire. Elles sont souvent fabriquées de la même manière que les circuits imprimés et sont disponibles dans plusieurs formes et dans de nombreuses dimensions (0,1 mm à 10 cm et plus).
02/11/08
ELEMENTS FINIS
35/40
Eléments de cours
De la statique à la RdM
VII - La flexion simple – état de contraintes et déformée statique
Action du moment de flexion
INTRODUCTION La flexion est par définition la superposition de deux chargements élémentaires sur une poutre : cette dernière est sollicitée en flexion (« flexion pure ») et au cisaillement (la poutre travaille à « l’effort tranchant »). Certains calculs que nous ne développerons pas ici permettent de conclure que l’action du moment de flexion est prédominante devant celle de l’effort tranchant, pour ce qui est de :
� l’état de contraintes sur une section droite de la poutre, � la déformée statique de la poutre.
Ce qui veut dire que pour calculer les contraintes ainsi que la déformation d’une poutre sollicitée en flexion simple, on pourra considérer que tout se passe comme si cette poutre n’était sollicitée qu’en flexion pure. Cette hypothèse est acceptable dès que la longueur de la poutre est égale à dix fois la hauteur (la plus grande dimension) de sa section, ce qui peut se comprendre aisément : si la hauteur de la section droite est proche de la longueur de la poutre, le cisaillement devient important et parallèlement la flexion « négligeable » puisque alors il devient plus difficile de fléchir la poutre sans la « cisaillée » en même temps.
Dans la suite de ce cours, nous nous placerons donc dans une configuration théorique de flexion pure, i.e. que l’effort tranchant est « faible », donc négligée quant à son action sur l’état de contraintes et la déformée.
PRINCIPE DE LA FLEXION PURE On applique un couple pur sur une éprouvette à ses deux extrémités, noté C suivant l’axe z
� normal au plan P dans lequel se
déforme la poutre. Le plan P est plan de symétrie pour la géométrie et le chargement de la poutre (problème de statique plane). La fibre moyenne (ou fibre neutre) est donc contenue dans ce plan de symétrie puisqu’elle définit l’ensemble des centres de gravité G(x) des sections droites.
02/11/08
ELEMENTS FINIS
36/40
Eléments de cours
De la statique à la RdM
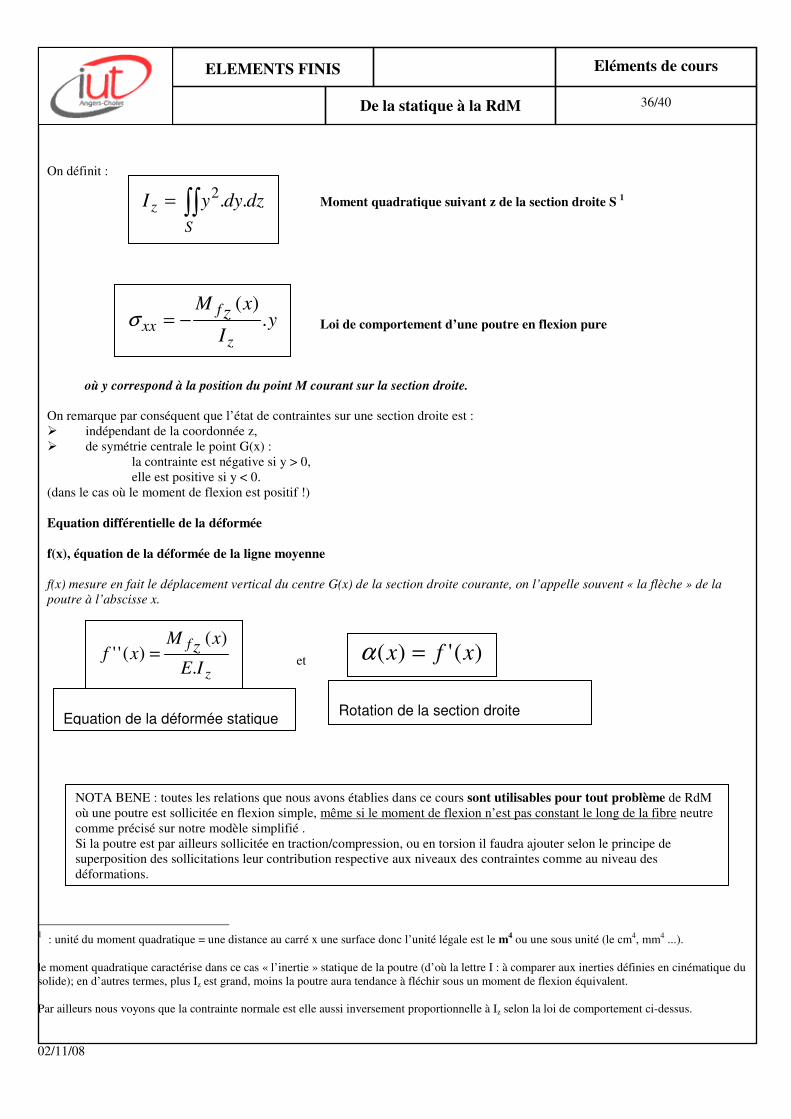
On définit : Moment quadratique suivant z de la section droite S 1 Loi de comportement d’une poutre en flexion pure où y correspond à la position du point M courant sur la section droite. On remarque par conséquent que l’état de contraintes sur une section droite est : � indépendant de la coordonnée z, � de symétrie centrale le point G(x) : la contrainte est négative si y > 0, elle est positive si y < 0. (dans le cas où le moment de flexion est positif !) Equation différentielle de la déformée f(x), équation de la déformée de la ligne moyenne f(x) mesure en fait le déplacement vertical du centre G(x) de la section droite courante, on l’appelle souvent « la flèche » de la poutre à l’abscisse x.
et
1 : unité du moment quadratique = une distance au carré x une surface donc l’unité légale est le m4 ou une sous unité (le cm4, mm4 ...). le moment quadratique caractérise dans ce cas « l’inertie » statique de la poutre (d’où la lettre I : à comparer aux inerties définies en cinématique du solide); en d’autres termes, plus Iz est grand, moins la poutre aura tendance à fléchir sous un moment de flexion équivalent. Par ailleurs nous voyons que la contrainte normale est elle aussi inversement proportionnelle à Iz selon la loi de comportement ci-dessus.
��=S
z dzdyyI ..2
yI
xzM
z
fxx .
)(−=σ
z
f
IE
xzMxf
.
)()('' = )(')( xfx =α
Equation de la déformée statique Rotation de la section droite
NOTA BENE : toutes les relations que nous avons établies dans ce cours sont utilisables pour tout problème de RdM où une poutre est sollicitée en flexion simple, même si le moment de flexion n’est pas constant le long de la fibre neutre comme précisé sur notre modèle simplifié . Si la poutre est par ailleurs sollicitée en traction/compression, ou en torsion il faudra ajouter selon le principe de superposition des sollicitations leur contribution respective aux niveaux des contraintes comme au niveau des déformations.

02/11/08
ELEMENTS FINIS
37/40
Eléments de cours
De la statique à la RdM
VIII Le cisaillement simple – état de contraintes et déformée statique
Action de l’effort tranchant
INTRODUCTION Le cisaillement est par définition un chargement élémentaire sur une poutre (la poutre travaille à « l’effort tranchant »). Il est par conséquent logique, au regard des hypothèses faites sur l’action du moment de flexion au chapitre précédent, que l’action de l’effort tranchant ne sera prise en compte que lorsqu’il n’existe pas de flexion associée. Par exemple, une poutre horizontale, de poids négligeable, encastrée à une extrémité et libre à son autre extrémité, de longueur l > 10.d, où d est le diamètre ou la dimension transversale la plus grande de la section droite, sollicitée par un effort vertical très proche de la liaison encastrement (de l’ordre de 1 à 3 fois d) pourra être considérée comme sollicitée au cisaillement pur, car la flexion sera négligeable. Au contraire, dès que l’effort s’éloigne de la liaison encastrement (dès que la distance dépasse 10.d), la flexion devient prépondérante et l’action du moment de flexion domine celle de l’effort tranchant : on retombe dans le modèle de calculs du chapitre précédent. Le cas intermédiaire devra être traité en tenant compte des deux actions : celle de l’effort tranchant et celle du moment de flexion ; ceci sort du cadre de notre cours… Dans la pratique, le cisaillement pur n’existe pas car il y a toujours la contribution du moment de flexion, qui sera prise en compte grâce à des coefficients de sécurité ; d’où le nom classique de « cisaillement simple », que l’on peut comprendre comme : poutre calculée au cisaillement pur avec un coefficient de majoration (ou de sécurité) pour tenir compte du cas réel : poutre sollicitée au cisaillement simple (cisaillement prépondérant + flexion faible).
PRINCIPE DU CISAILLEMENT PUR On applique deux efforts F et –F verticaux égaux et opposés sur une éprouvette horizontale, à une distance x∆ petite devant le diamètre d de la poutre (ou sa plus grande dimension transversale si la section est prismatique). Le plan contenant les deux efforts définit le plan de symétrie pour la géométrie et le chargement de la poutre (problème de statique plane). La fibre moyenne (ou fibre neutre) est donc contenue dans ce plan de symétrie puisqu’elle définit l’ensemble des centres de gravité G(x) des sections droites. L’étude de l’équilibre global de la poutre permet de conclure qu’elle ne subit aucune sollicitation (si son poids propre est négligeable devant les efforts F et -F) sauf localement une sollicitation à l’effort tranchant valant entre les points A et B : =)(xTy - (efforts à gauche en projection sur l’axe y
�) = - ( -F ) = F > 0
La partie de la poutre située entre A et B se trouve distordue : la paroi gauche s’est translatée d’une distance y∆ par rapport à la paroi droite. On définit alors : Déformation angulaire ( ! ! sans unité) (ou glissement relatif) Etat de contrainte Si on note S la valeur de la surface de la section droite cisaillée, on a :
S
xTyxyxy
)(== τσ ou plus simplement : contrainte tangentielle (N/m2 ou Pa)
ou cission La loi de Hooke permet de définir la proportionnalité entre la contrainte tangentielle et la déformation angulaire : Avec G : module d’élasticité transversal Ou module de Coulomb (unité : MPa)
xy
∆∆=≈ γγ tan
S
Ty=τ
γτ .G=
02/11/08
ELEMENTS FINIS
38/40
Eléments de cours
De la statique à la RdM
Le module de Coulomb se détermine, comme le module de Young, par des essais sur éprouvettes ; pour les matériaux isotropes, ces deux modules ne sont pas indépendants (voir la loi de Hooke généralisée) et on a :
où ν est le coefficient de Poisson Ainsi, E = 210 000 MPa pour un acier allié au chrome molybdène (24 CD4), avec ν = 0.3 on obtient un module de Coulomb valant : G = 210 000 / 2,6 ≈ 80 000 MPa. Voici quelques autres valeurs pour G : Plexiglas 11 000 MPa Bronzes 48 000 MPa Verre 28 000 MPa Aciers 80 000 MPa Laiton 34 000 MPa Aciers à ressorts (C60) 84 000 MPa Fontes 40 000 MPa Dimensionnement – Limite élastique au cisaillement et résistance pratique au cisaillement Pour des raisons de sécurité et d’incertitude sur les hypothèses (le cisaillement pur n’existe pas), la contrainte tangentielle doit rester inférieure à la résistance pratique au cisaillement (ou au glissement). La résistance pratique au cisaillement est définie par rapport à la limite (ou résistance) élastique au cisaillement selon l’équation : où (s) est le coefficient de sécurité (voir tableau ci-contre). Alors que la limite élastique au cisaillement est reliée à la limite élastique en traction par : IX La torsion pure – état de contraintes et déformée statique
Action du moment de torsion
INTRODUCTION La torsion d’une poutre est par définition créée par un chargement élémentaire issu du moment de torsion.
PRINCIPE DE LA TORSION PURE On applique un couple pur valant le moment de torsion Mt sur une éprouvette à ses deux extrémités, suivant l’axe x
� définissant la
fibre neutre. Il existe un plan de symétrie pour la géométrie et le chargement de la poutre (problème de statique plane). La fibre moyenne (ou fibre neutre) est donc contenue dans ce plan de symétrie puisqu’elle définit l’ensemble des centres de gravité G(x) des sections droites.
)1(2 ν+= E
G
se
pgττ =
ee στ 5.0= pour les aciers doux ( MPae 270<σ ) et les alliages d’aluminium
ee στ 7.0= pour les aciers mi durs ( MPae 500<σ )
ee στ 8.0= pour les aciers durs ( MPae 600>σ ) et les fontes

02/11/08
ELEMENTS FINIS
39/40
Eléments de cours
De la statique à la RdM
On constate expérimentalement que : � la longueur de l’éprouvette reste constante, � toute section droite reste droite et circulaire (sans variation de rayon), � une section droite tourne en entier dans son plan d’un angle proportionnel à α (angle dont tournent les deux extrémités l’une
par rapport à l’autre).
Equation de la déformée angulaire On pose par définition : Angle unitaire de torsion (unité : rad/m) moment quadratique polaire (m4) suivant x de la section droite S On rappelle que Io se calcule exclusivement au centre G(x) de la section droite. On a par ailleurs : Io = Iz + Iy L’expression précédente donne alors :
0..)( IGxM t θ= ⇔ Qui nous permet d’écrire une autre expression pour la contrainte tangentielle (à l’aide de (d)) :
rIG
xMGrG
o
t ..
)(... == θτ
Lαθ =
���� +==SS
dydzzydSrI ).(. 2220
rI
xMrx
o
t .)(
),( =τloi de
comportement de la poutre en torsion pure
0.)(
IGxM t=θ Equation de la déformée angulaire
02/11/08
ELEMENTS FINIS
40/40
Eléments de cours
De la statique à la RdM
Dimensionnement ! ! ! la condition la plus stricte des deux conditions suivantes doit être respectée. 1 - condition de rigidité Pour les arbres de grandes longueurs (arbre de forage de puits de pétrole, arbres de navires par exemple) on évite de trop grandes déformations de torsion qui risqueraient d’engendrer des vibrations trop importantes pour un fonctionnement correct. A cet effet, on impose un angle unitaire limite de torsion : en général il faudra respecter 0,1 à 0,25 °/mètre. 2 – condition de résistance
Nous avons : RIM t
théorique .0
max =τ où R est le rayon de l’éprouvette cylindrique, MAIS :
- Pour des raisons de sécurité et d’incertitude sur les hypothèses (la torsion pure existe rarement !), la contrainte tangentielle doit rester inférieure à la résistance pratique au cisaillement (ou au glissement). La résistance pratique au cisaillement est définie par rapport à la limite (ou résistance) élastique au cisaillement selon l’équation : - La contrainte maximale calculée sur le modèle théorique sans concentration de contraintes sera de plus majorée d’un coefficient de concentration de contraintes (supérieur à 1), déterminé par des tableaux.
avec tK : coefficient de concentration de contraintes en torsion on devra donc au final vérifier que :
se
pgττ =
où (s) est le coefficient de sécurité
théoriquetréelle K maxmax .ττ =
pgt
tthéoriquet RIM
KK ττ ≤= ...0
max




















![[RDM] Edition Zéro](https://img.pdfslide.fr/doc/110x75/568c4cbd1a28ab4916a14f73/rdm-edition-zero.jpg)
![[RDM] Edition Deux](https://img.pdfslide.fr/doc/110x75/568bd5121a28ab20349721a2/rdm-edition-deux.jpg)





